
Radial Force-Current Characteristics Analysis of Three-Pole Radial-Axial Hybrid Magnetic Bearings and Their Structure Improvement

Abstract
:1. Introduction
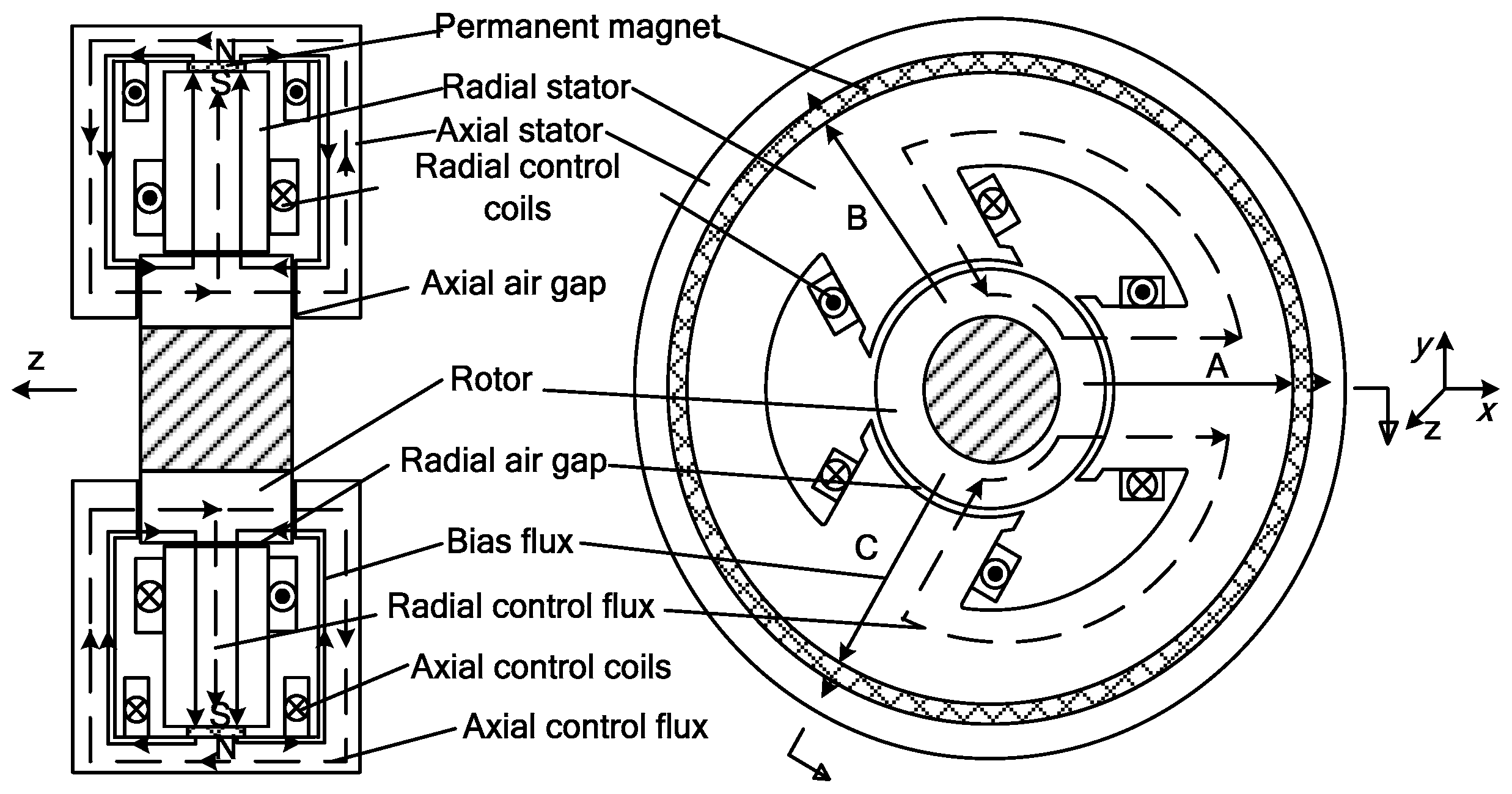
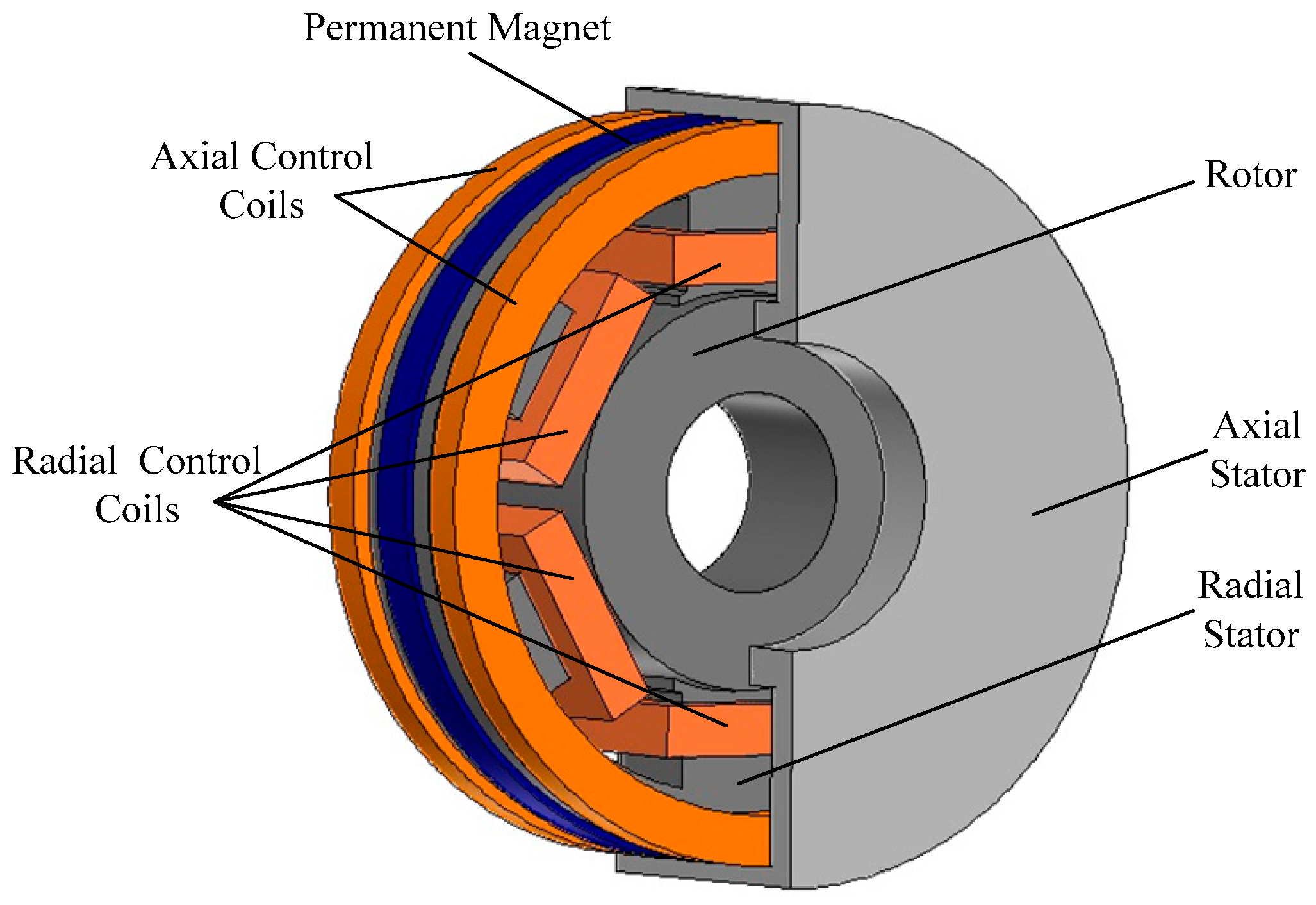
2. Radial Suspension Force-Current Characteristics Analysis of the Three-Pole Radial-Axial Hybrid Magnetic Bearings (HMB)
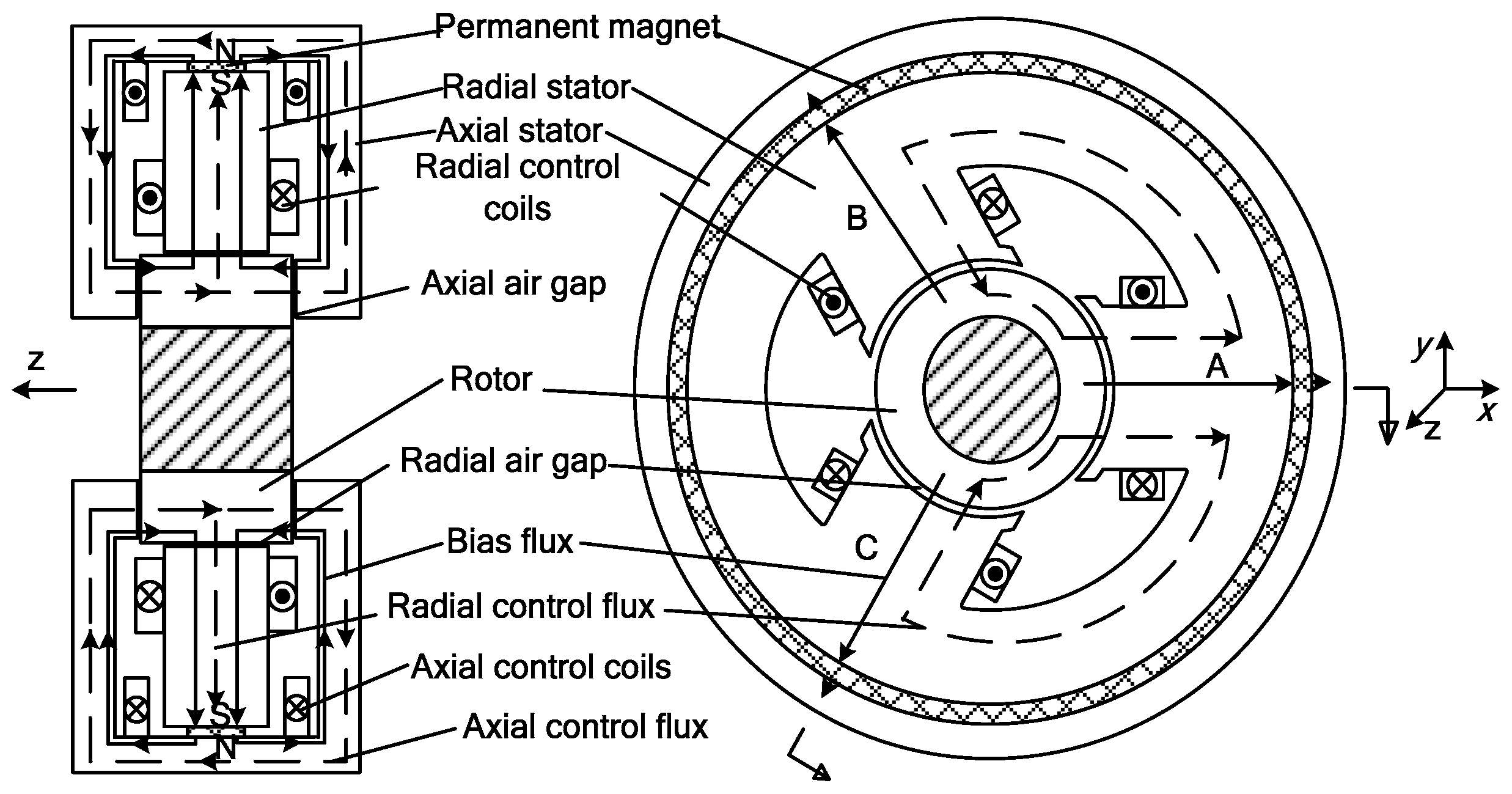
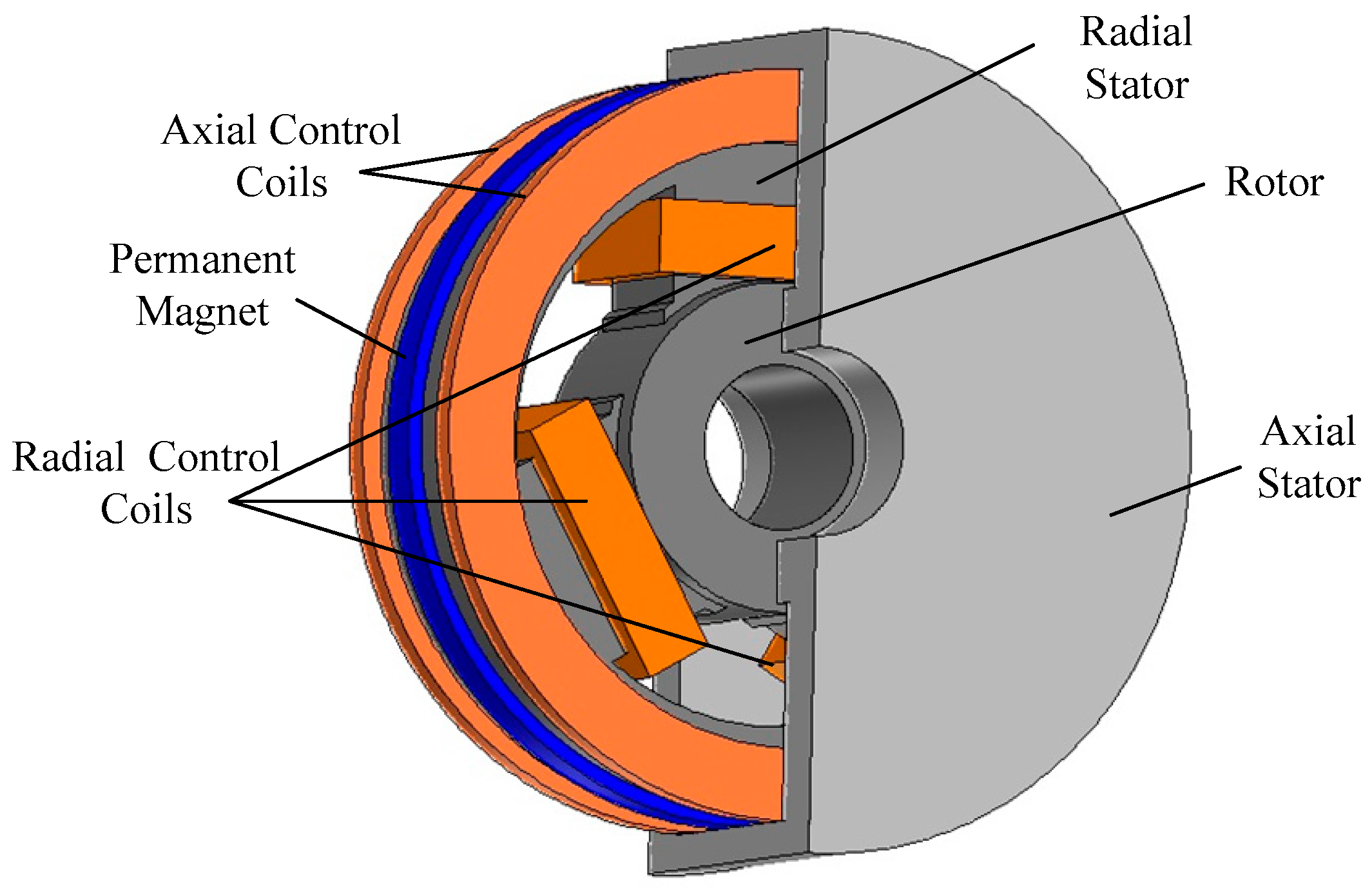
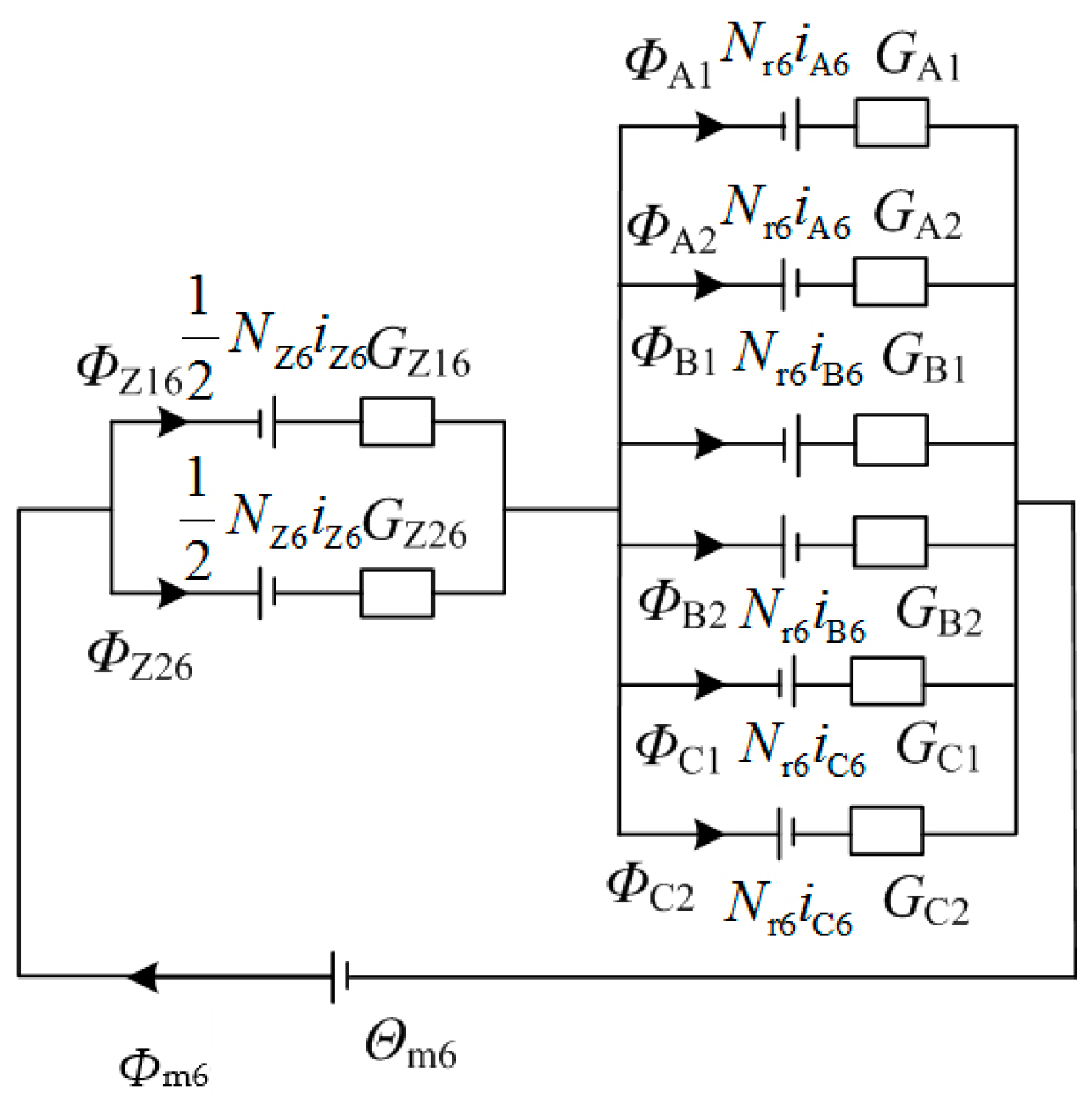
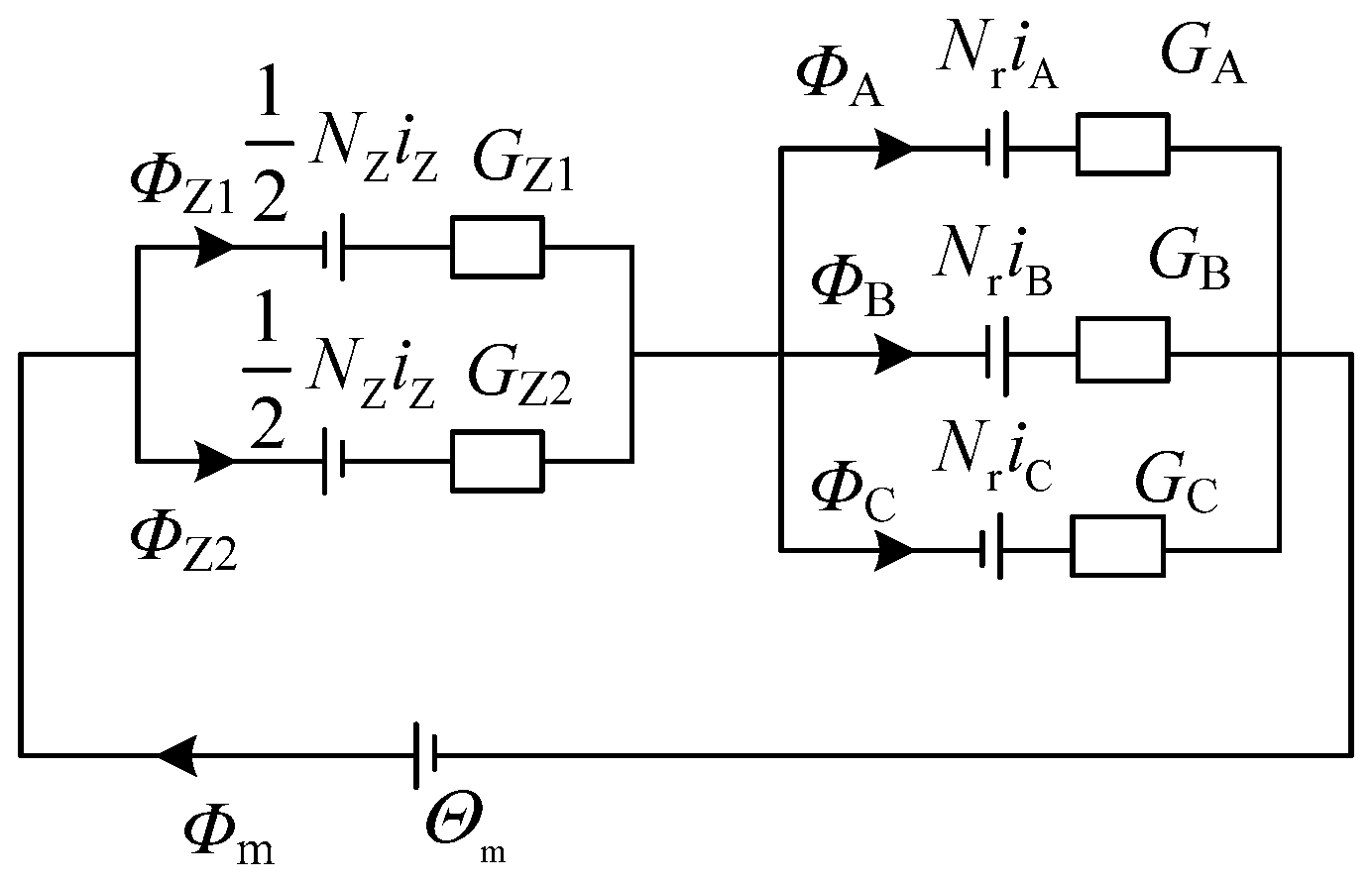
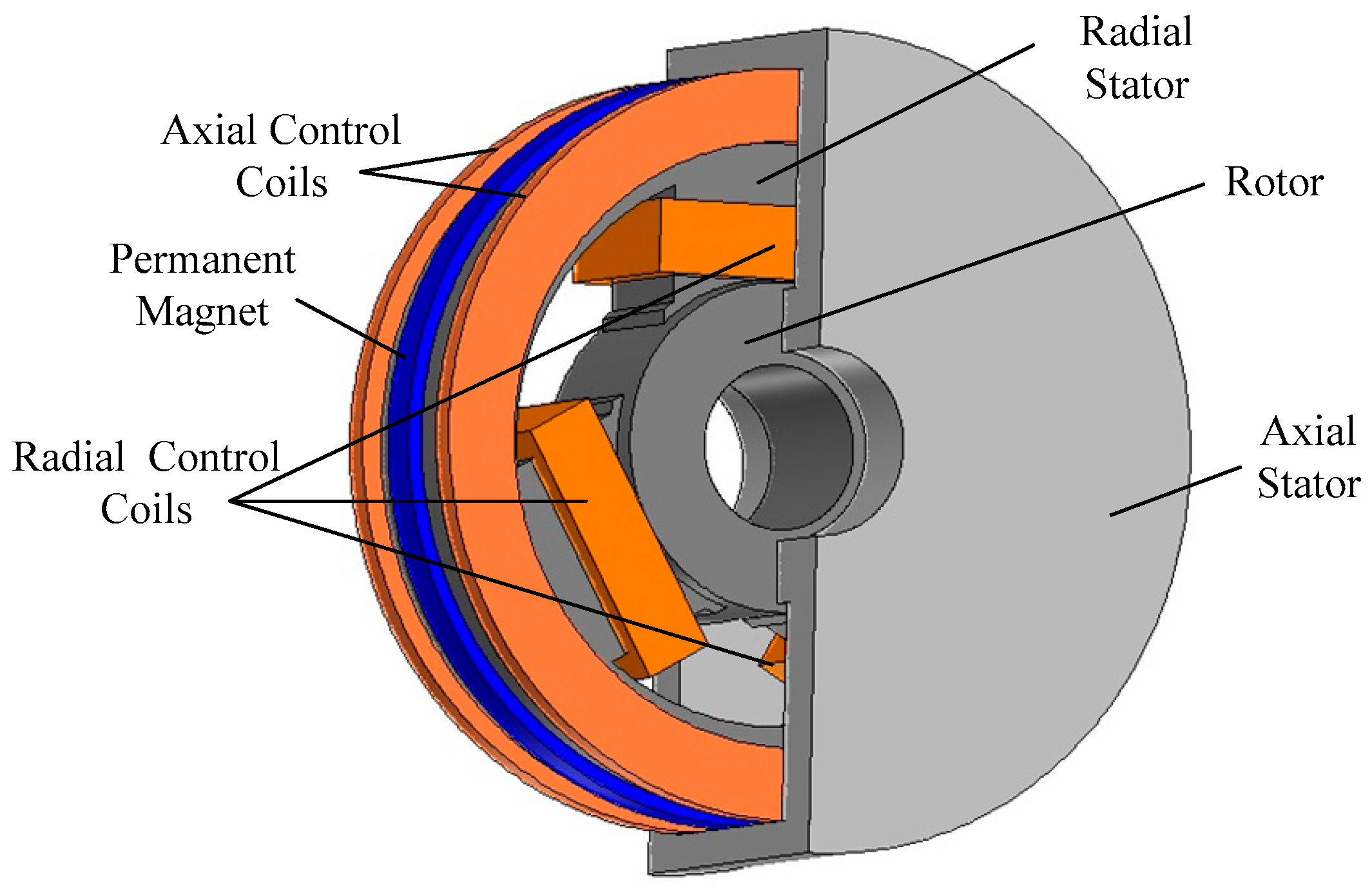
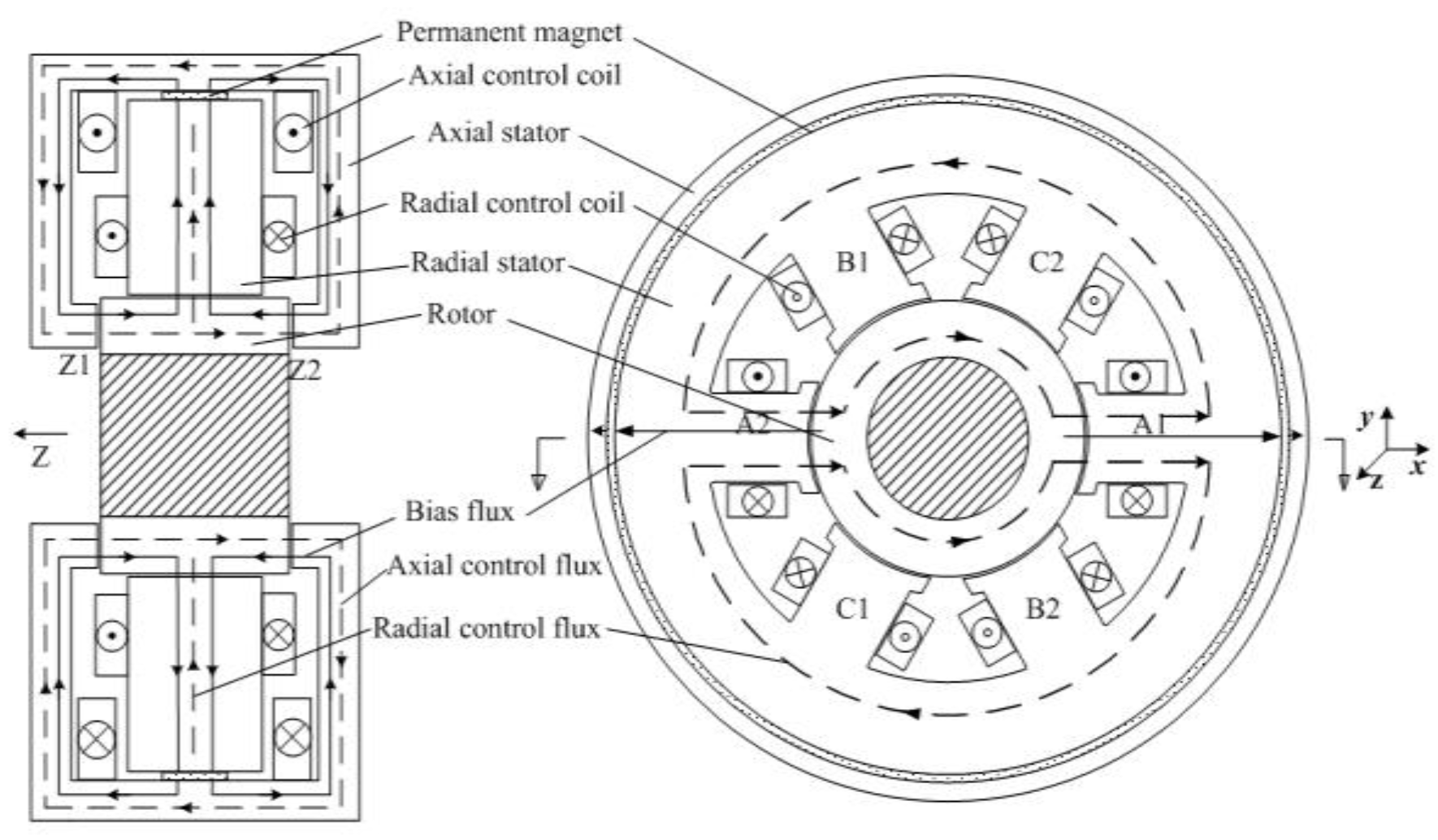
2.1. Mathematical Model of the Three-Pole Radial-Axial Hybrid Magnetic Bearings (HMB)
2.2. Radial Force-Current Characteristics Analysis
2.2.1. Radial Carrying Capacity Analysis
2.2.2. Nonlinearity Analysis
2.2.3. Coupling Analysis
2.3. Finite Element Analysis
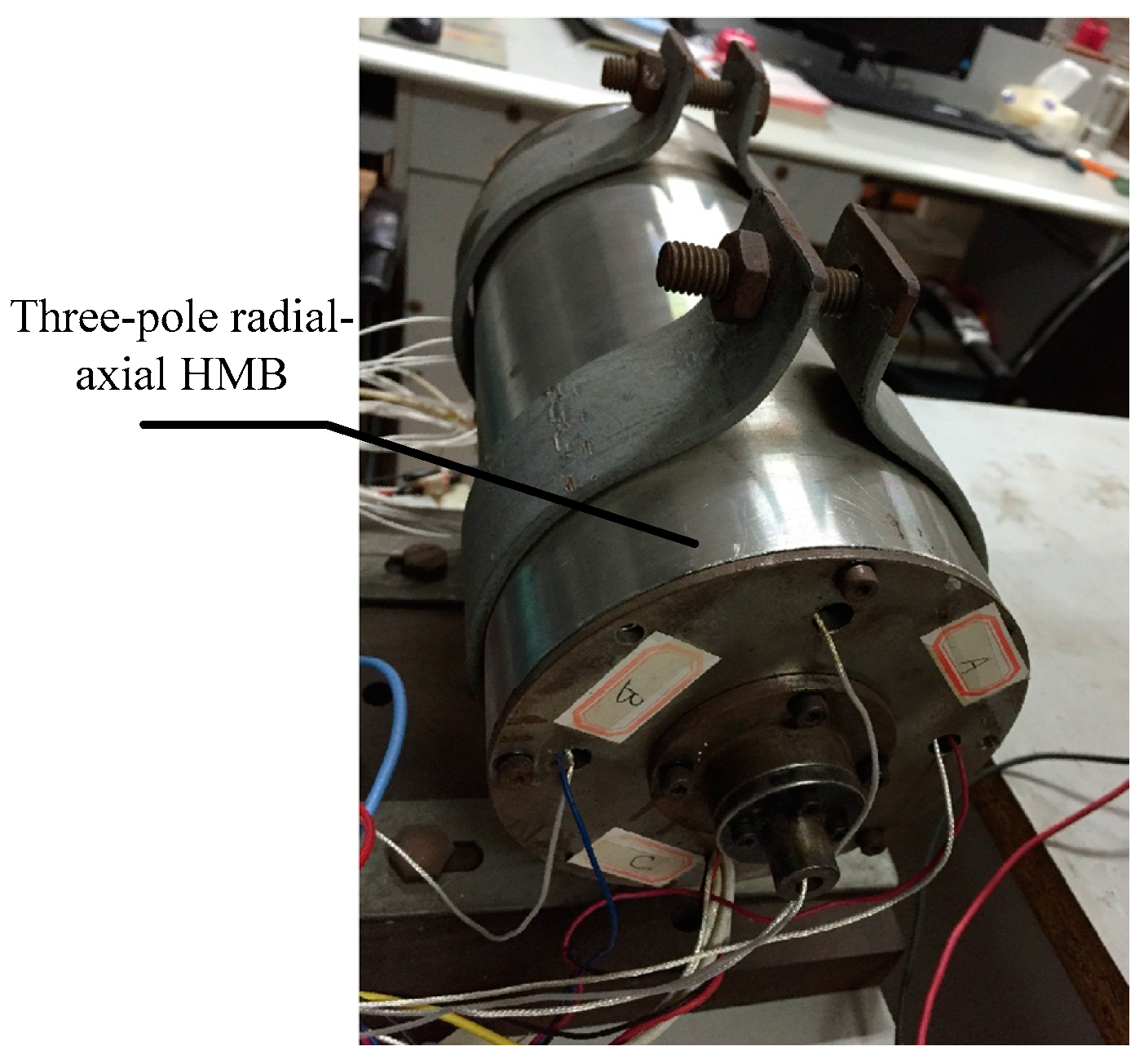
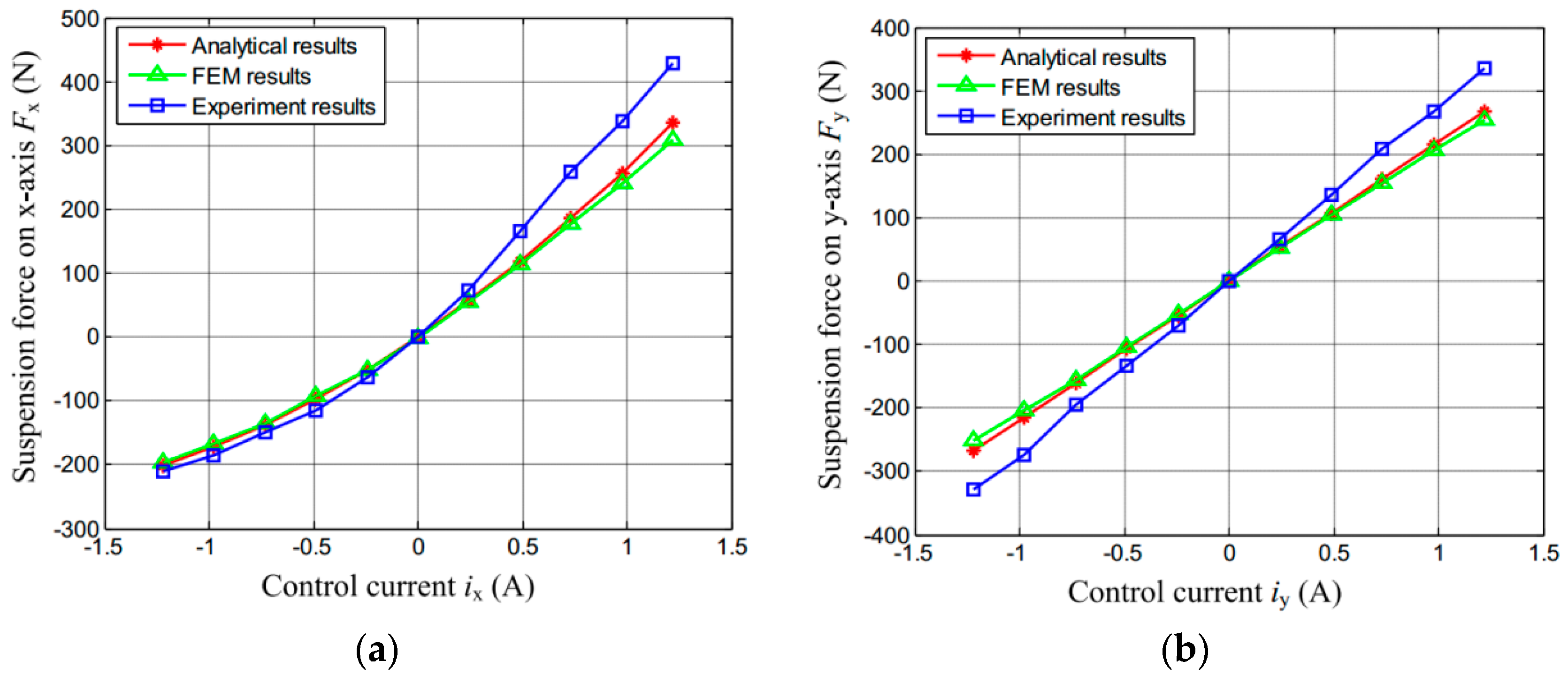
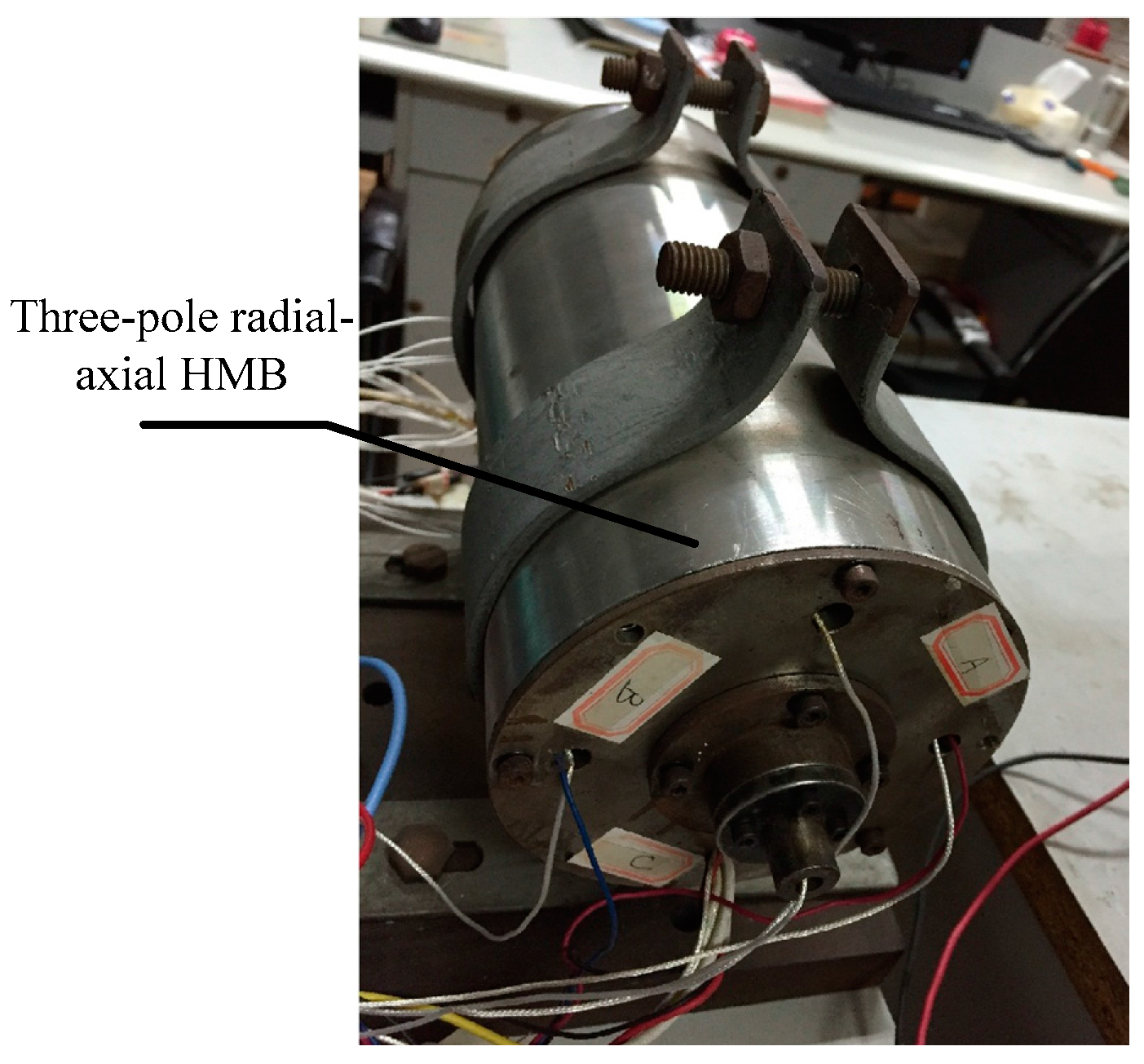
2.4. Experiment Validation
3. The Structure Improvement of Three-Pole Radial-Axial Hybrid Magnetic Bearings (HMB)
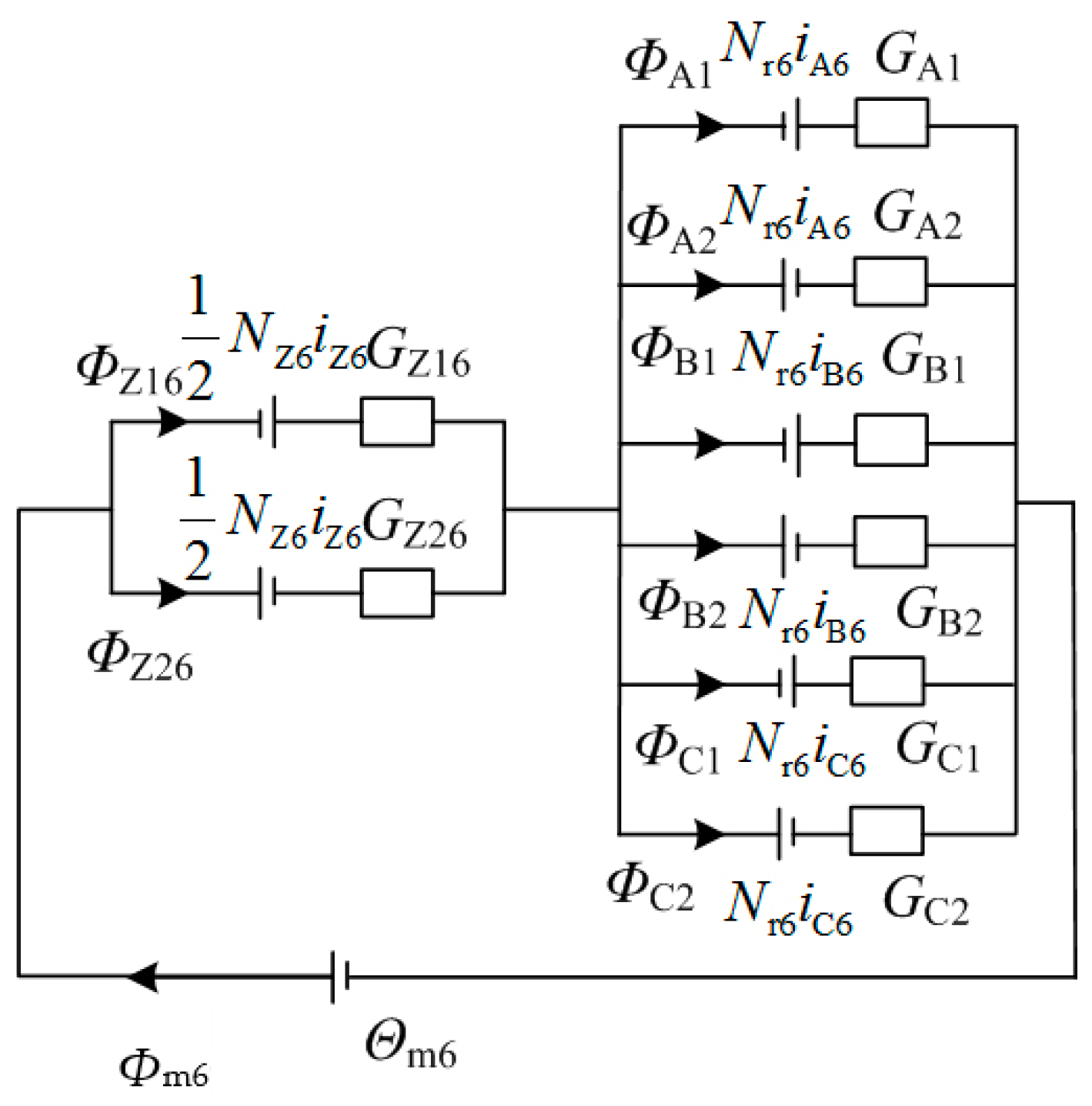
3.1. Radial Suspension Force-Current Characteristics Analysis of a Six-Pole Radial-Axial Hybrid Magnetic Bearings (HMB)
3.2. Validation by Finite Element Method (FEM) Analysis
4. Conclusions
- (1)
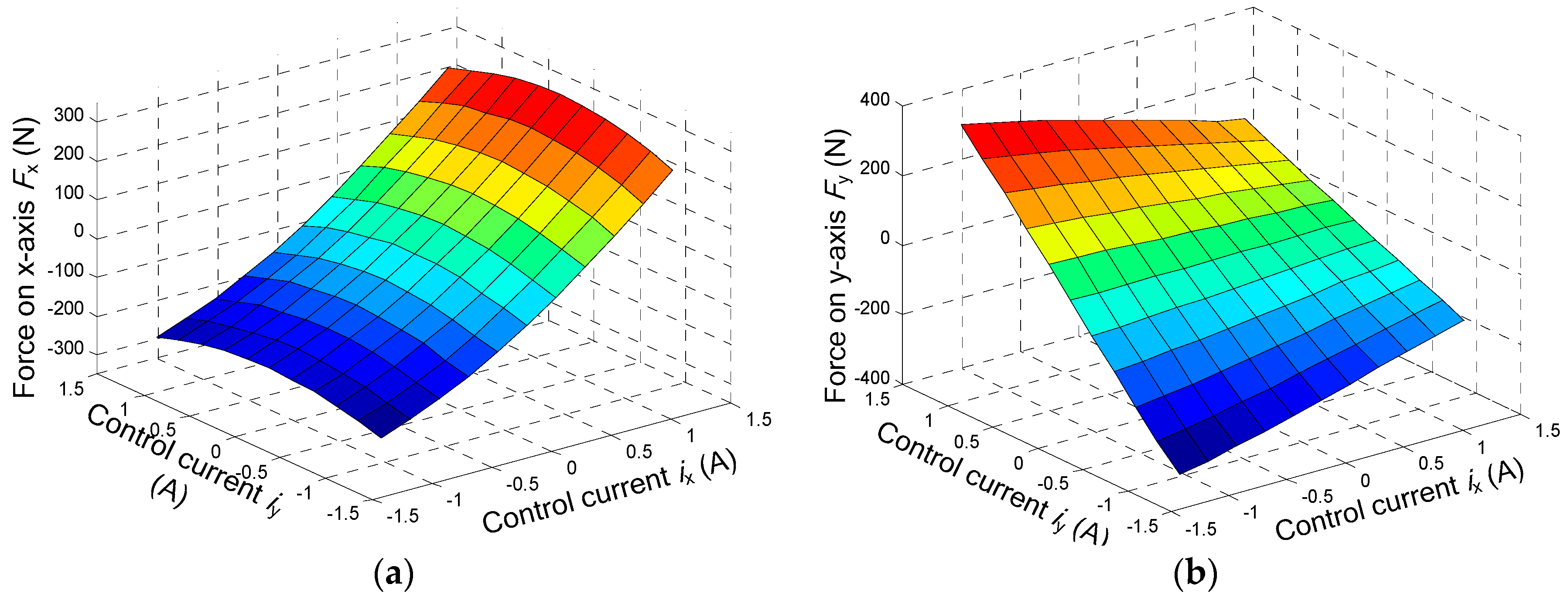
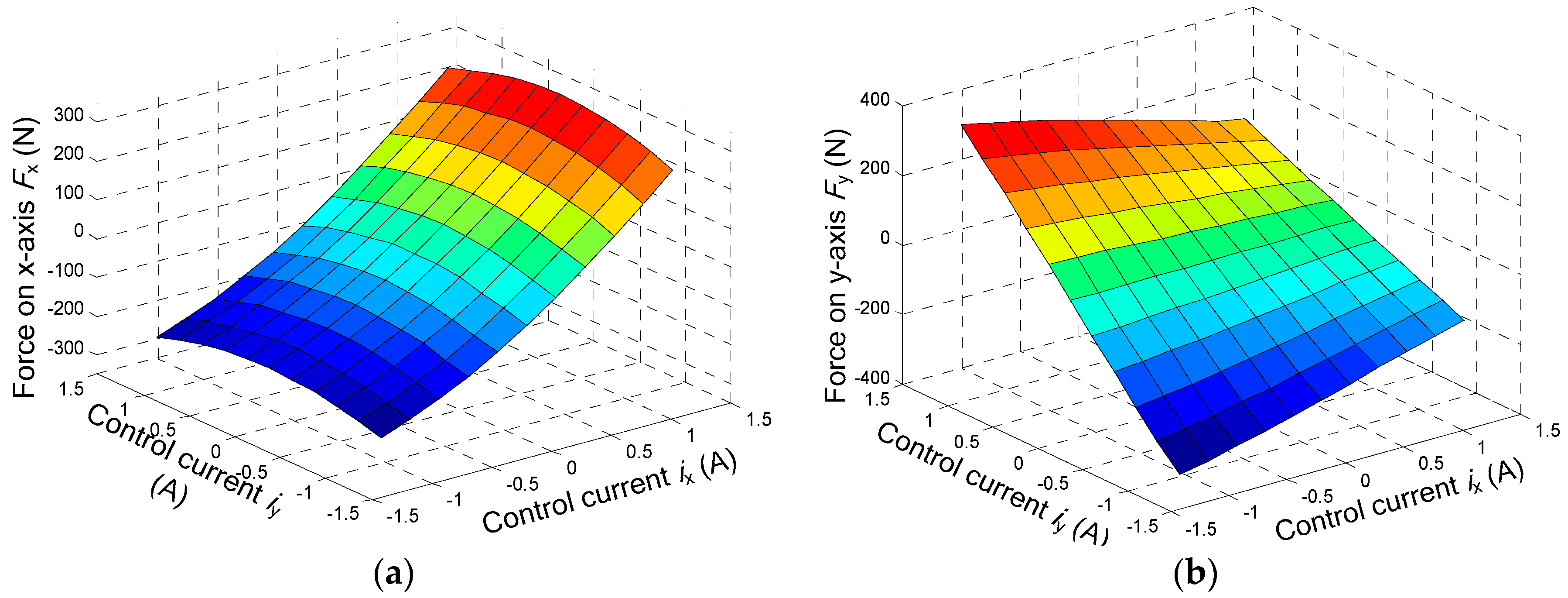
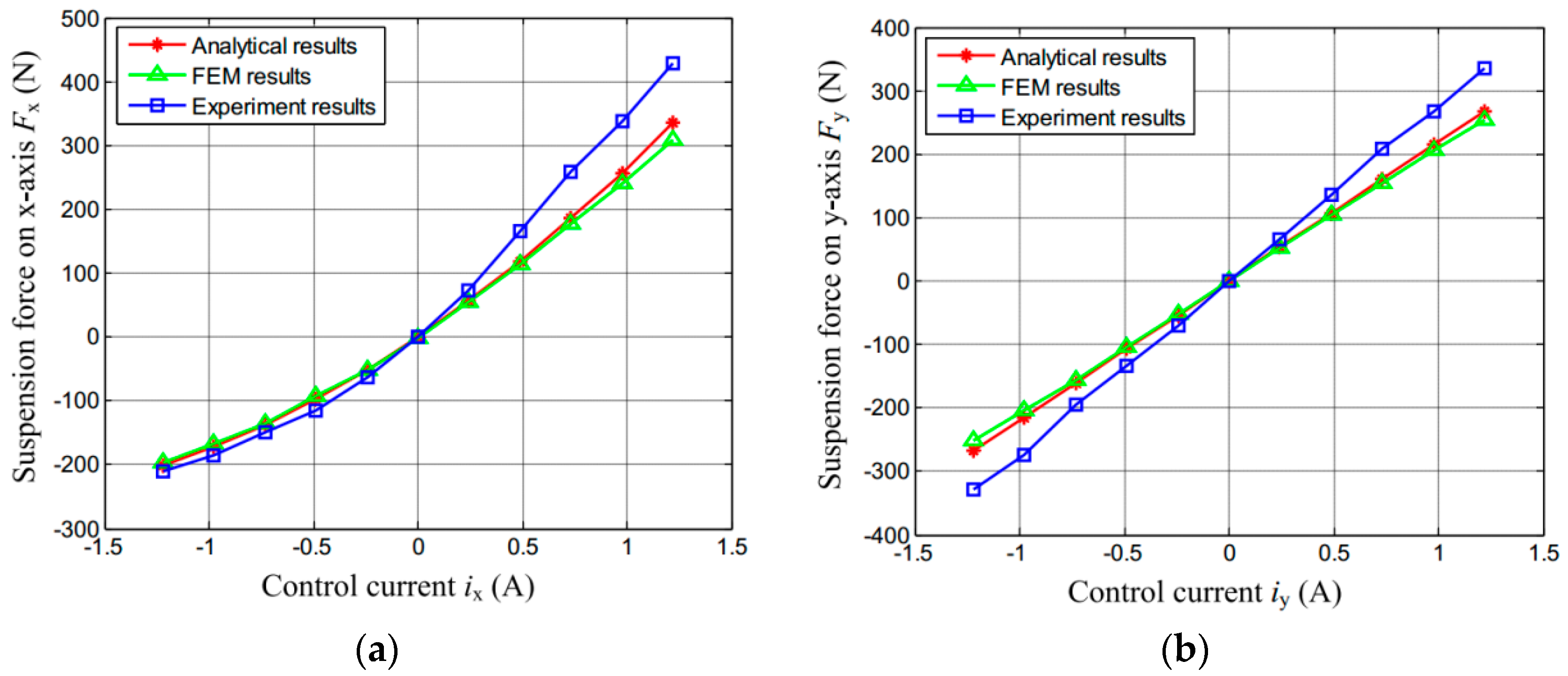
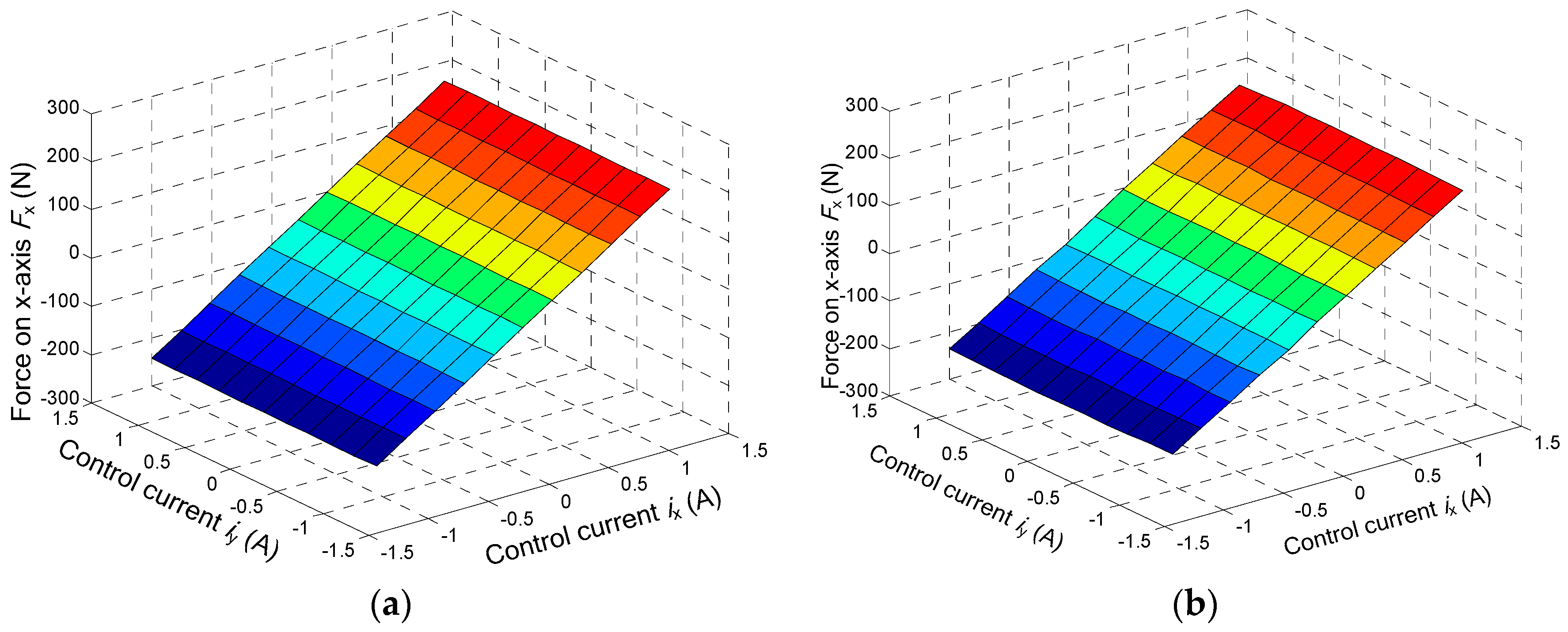
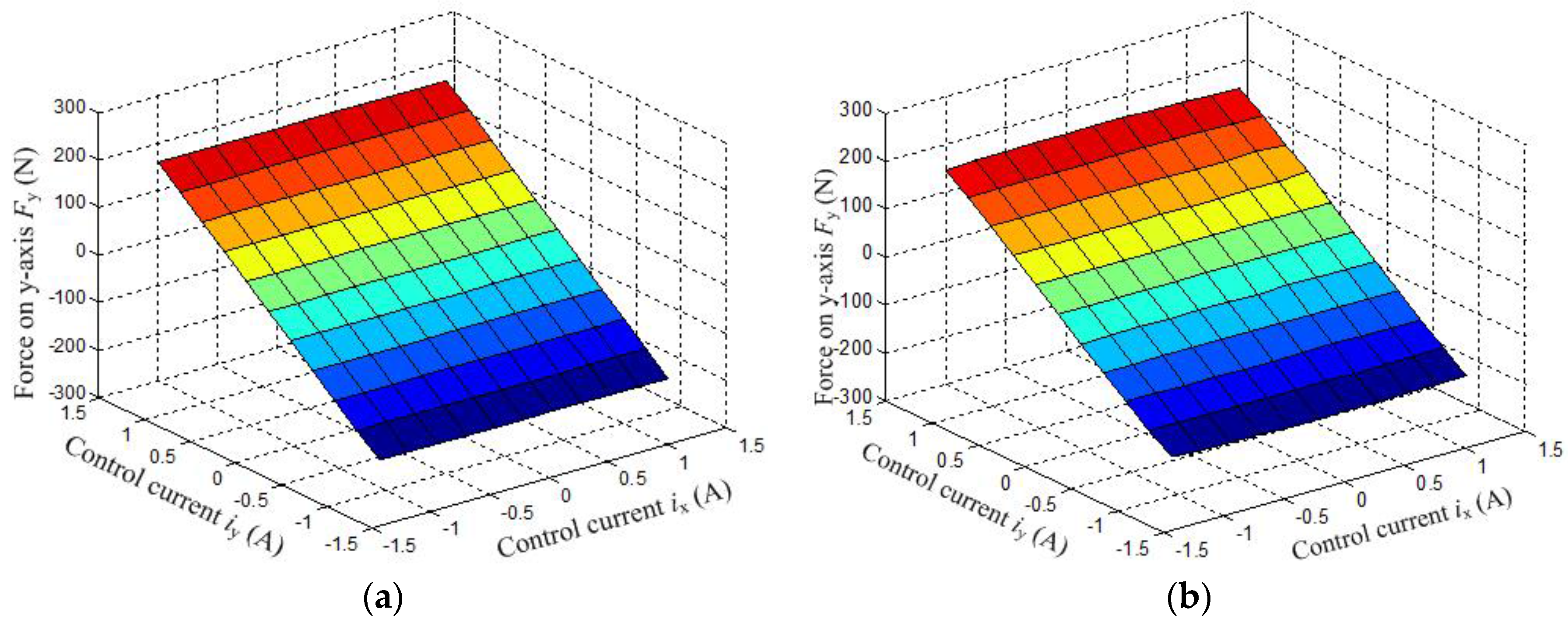
- Even when the rotor is in the center position, the relationship between the radial suspension force and radial control current of a three-pole radial-axial HMB is nonlinear. When the current of iy is constant, the suspension force on the x-axis Fx is a quadratic function of ix, and the curve of Fx − ix is a parabola. This characteristic makes the carrying capacity in different directions of coordinate axis different. When iy is changed, the Fx − ix curve moves down with the square of iy. When ix is constant, the suspension force on the y-axis Fy is linear with iy, but when ix is changed, the slope of the F − iy curve decreases with ix. As the nonlinearity is obvious, only when the rotor displacement is between [−0.08 mm, 0.08 mm], the three-pole radial-axial HMB can be regarded as a linear system (the air gap length in this paper is 0.5 mm).
- (2)
- As the magnetic force is a quadratic function of the flux and the flux is linear with control current, the magnetic flux is a quadratic function of the control current, which causes nonlinearity and coupling. However the suspension force on the y-axis is linear with control current. This is because the B-pole and C-pole are symmetric about the x-axis, and the symmetric structure makes the quadratic terms of the B-pole and C-pole offset each other, so it can be deduced that the nonlinearity of the suspension force on the x-axis is caused by both the nonlinear relationship between suspension force and control current and the asymmetric structure of the three radial magnetic poles.
- (3)
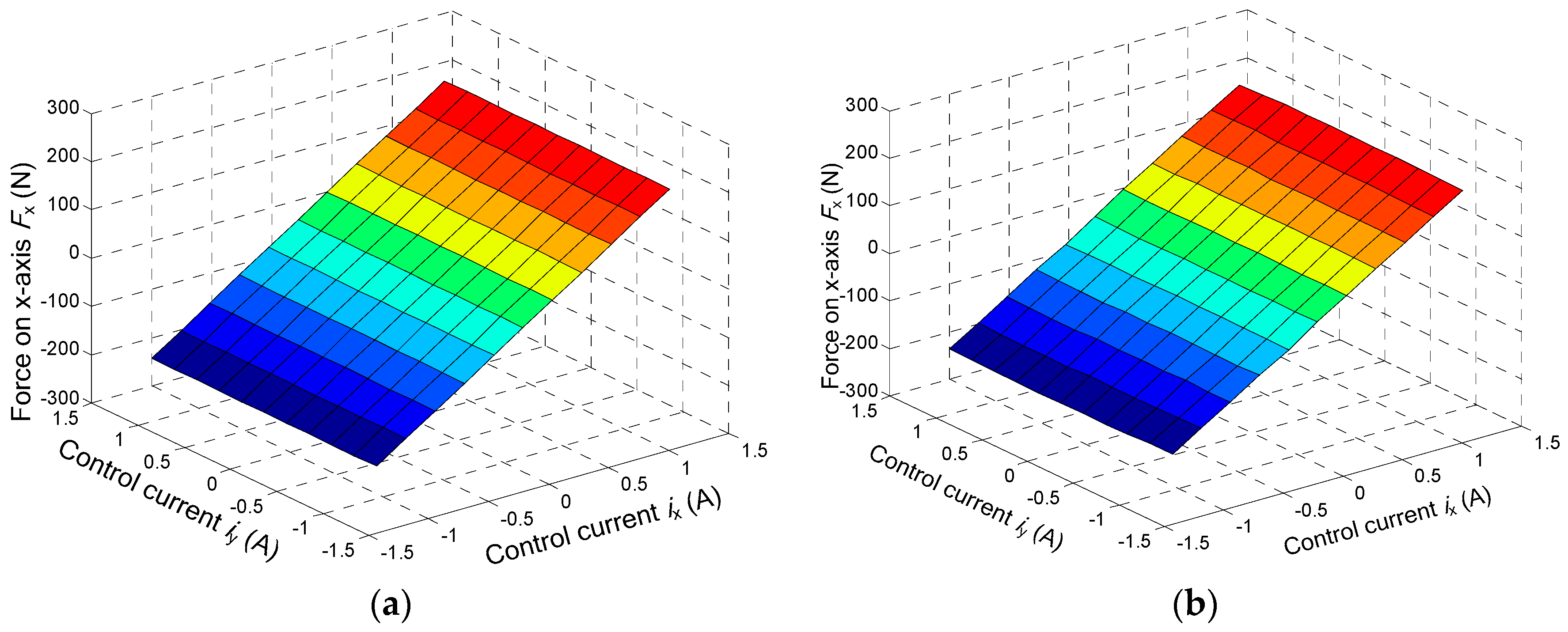
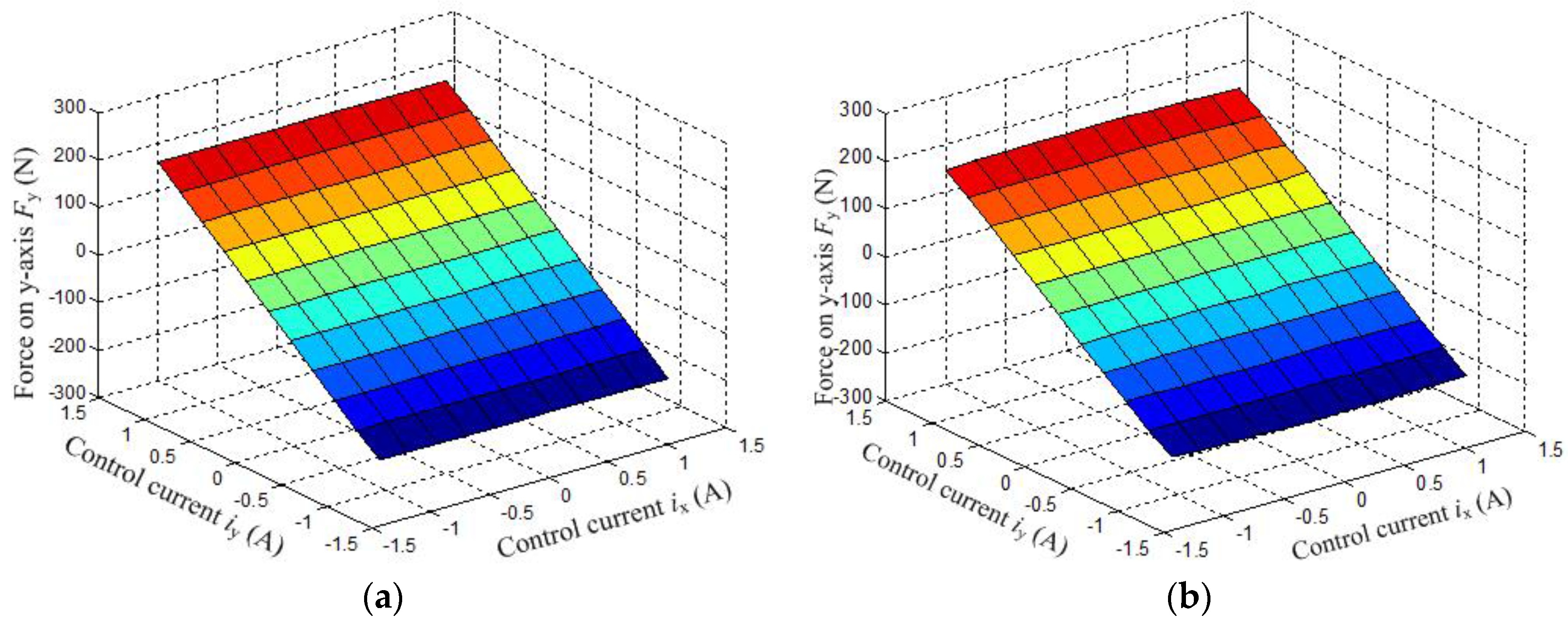
- According to the analysis results, if we add three magnetic poles in the opposite direction of the three radial magnetic poles, the nonlinearity of the radial suspension force and control current can be eliminated. Namely the six-pole radial-axial HMB has better radial suspension force-current performance characteristics. The analytical and FEM results have shown that the relationship between the radial suspension force and control current of a six-pole radial-axial HMB is linear and no coupling exists, so when the rotor displacement is between [−0.2 mm, 0.2 mm], the six-pole radial-axial HMB can be regarded as a linear system (the air gap length in this paper is 0.5 mm).
- (4)
- The parameters of the three-pole radial-axial HMB and the parameters of the six-pole radial-axial HMB are both designed based on the requirement that the radial carrying capacity is 200 N. It can be calculated that the volume of a six-pole radial-axial HMB is 374,544 mm2, which is smaller than the volume of three-pole radial-axial HMB at 549,100 mm2, so the six-pole radial-axial HMB has a more compact structure than a three-pole radial-axial HMB with the same radial carrying capacity.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Schweitzer, G.; Maslen, E.H. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer-Verlag: New York, NY, USA, 2009. [Google Scholar]
- Han, B.C.; Zheng, S.Q.; Le, Y.; Xu, S. Modeling and analysis of coupling performance between passive magnetic bearing and hybrid magnetic radial bearing for magnetically suspended flywheel. IEEE Trans. Magn. 2013, 49, 5356–5370. [Google Scholar] [CrossRef]
- Toh, C.S.; Chen, S.L. Design and control of a ring-type flywheel battery system with hybrid halbach magnetic bearings. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Besancon, France, 8–11 July 2014.
- Hijikata, K.; Takemoto, M.; Ogasawara, S.; Chiba, A.; Fukao, T. Behavior of a novel thrust magnetic bearing with a cylindrical rotor on high speed rotation. IEEE Trans. Magn. 2009, 45, 4617–4620. [Google Scholar] [CrossRef]
- Noh, M.D.; Cho, S.R.; Kyung, J.H.; Ro, S.; Park, J. Design and implementation of a fault-tolerant magnetic bearing system for turbo-molecular vacuum pump. IEEE/ASME Trans. Machatron. 2005, 10, 626–631. [Google Scholar] [CrossRef]
- Kim, S.H.; Shin, J.W.; Ishiyama, K. Magnetic bearings and synchronous magnetic axial coupling for the enhancement of the driving performance of magnetic wireless pumps. IEEE Trans. Magn. 2014, 50. [Google Scholar] [CrossRef]
- Kim, H.Y.; Lee, C.W. Analysis of eddy-current loss for design of small active magnetic bearings with solid core and rotor. IEEE Trans. Magn. 2004, 40, 3293–3301. [Google Scholar] [CrossRef]
- Bachovchin, K.D.; Hoburg, J.F.; Post, R.F. Stable levitation of a passive magnetic bearing. IEEE Trans. Magn. 2013, 49, 609–617. [Google Scholar] [CrossRef]
- Fang, J.C.; Wang, C.; Wen, T. Design and optimization of a radial hybrid magnetic bearing with separated poles for magnetically suspended inertially stabilized platform. IEEE Trans. Magn. 2014, 50. [Google Scholar] [CrossRef]
- Fang, J.C.; Sun, J.J.; Liu, H.; Tang, J. A novel 3-DOF axial hybrid magnetic bearing. IEEE Trans. Magn. 2010, 46, 4034–4045. [Google Scholar]
- Hou, E.Y.; Liu, K. Investigation of axial carrying capacity of radial hybrid magnetic bearing. IEEE Trans. Magn. 2012, 48, 38–46. [Google Scholar]
- Imoberdorf, P.; Nussbaumer, T.; Kolar, J.W. Analytical model of current-force characteristics of a combined radial-axial magnetic bearing. In Proceedings of the 12th International Symposium on Magnetic Bearings, Wuhan, China, 21–24 August 2010.
- Chen, S.L.; Hsu, C.T. Optimal design of a three-pole active magnetic bearing. IEEE Trans. Magn. 2002, 38, 3458–3466. [Google Scholar] [CrossRef]
- Matsuda, K.; Kanemitsu, Y.; Kijimoto, S. Optimal number of stator poles for compact active radial magnetic bearings. IEEE Trans. Magn. 2007, 43, 3420–3427. [Google Scholar] [CrossRef]
- Schöb, R.; Redemann, C.; Gempp, T. Radial active magnetic bearing for operation with a 3-phase power converter. In Proceedings of the 4th International Symposium Magnetic Suspension Technology, Gifu, Japan, 30 October–1 November 1997.
- Hofmann, W. Behaviour and control of an inverter-fed three-pole active radial magnetic bearing. In Proceedings of the 2003 IEEE International Symposium on Industrial Electronics, Janeiro, Brazil, 9–11 June 2003.
- Beizama, A.M.; Echeverria, J.M.; Martinez-Iturralde, M.; Egaña, I.; Fontan, L. Comparison between pole-placement control and sliding mode control for 3-pole radial magnetic bearings. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 11–13 June 2008.
- Grbeša, B. Low loss and low cost active radial homopolar magnetic bearing. In Proceedings of the 6th International Symposium on Magnetic Bearings, Cambridge, MA, USA, 5–7 August 1998.
- Zhang, W.Y.; Zhu, H.Q. Precision modeling method specifically for AC magnetic bearings. IEEE Trans. Magn. 2013, 49, 5543–5553. [Google Scholar] [CrossRef]
- Zhu, H.Q.; Ling, D.S.; Jv, J.T. Modeling for three-pole radial hybrid magnetic bearing considering edge effect. Energies 2016, 9, 345. [Google Scholar] [CrossRef]
- Ji, L.; Xu, L.X.; Jin, C.W. Research on a low power consumption six-pole heteropolar hybrid magnetic bearing. IEEE Trans. Magn. 2013, 49, 4918–4926. [Google Scholar] [CrossRef]
- Xie, Z.Y.; Zhu, H.Q.; Sun, Y.K. Structure and control of AC-DC three-degree-of-freedom hybrid magnetic bearing. In the 8th International Conference on Electrical Machines Systems, Nanjing, China, 27–29 September 2005.
- Zhu, H.Q.; Ju, J.T. Development of three-pole magnetic bearings and key technologies. Proc. CSEE 2014, 34, 1360–1367. (In Chinese) [Google Scholar]
- Zhu, H.Q.; Xie, Z.Y.; Zhu, D.H. Principles and parameter design for AC-DC three-degree-of-freedom hybrid magnetic bearings. Chin. J. Mech. Eng. 2006, 19, 534–539. [Google Scholar] [CrossRef]
- Zhu, H.Q.; Zhang, Z.; Zhu, D.H.; Wang, D.M.; Xie, Z.Y. Structure and finite element analysis of an AC-DC three degrees of freedom hybrid magnetic bearing. Proc. CSEE. 2007, 27, 77–81. (In Chinese) [Google Scholar]
- Zhang, W.Y.; Zhu, H.Q. Improved model and experiment for AC-DC three-degree-of-freedom hybrid magnetic bearing. IEEE Trans. Magn. 2013, 49, 5554–5565. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Zhu, H.Q.; Yang, Z.B.; Sun, X.D.; Yuan, Y. Nonlinear model analysis and “switching model” of AC-DC three-degree-of-freedom hybrid magnetic bearing. IEEE/ASME Trans. Mechatron. 2016, 21, 1102–1115. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Radial and axial air gap length δr, δZ/mm | 0.5 |
| Saturation flux density BS/T | 0.8 |
| The area of radial magnetic poles SrP/mm2 | 1396 |
| The area of axial magnetic poles SZP/mm2 | 2094 |
| The max ampere-turns of radial coils Nrirmax/At | 160 |
| The max ampere-turns of axial coils Nrirmax/At | 320 |
| Magnetomotive force of permanent magnet Θm/At | 320 |
| Outer diameter of rotor DRot1/mm | 68 |
| Inner diameter of rotor DRot2/mm | 34 |
| Axial width of rotor WRot/mm | 39 |
| Outer diameter of radial stator yoke Dr1/mm | 149 |
| Inner diameter of radial stator yoke Dr2/mm | 115 |
| Inner diameter of radial magnetic poles Dr3/mm | 69 |
| Radial width of radial magnetic poles WrP/mm | 45 |
| Axial width of radial stator LrP/mm | 29 |
| Outer diameter of permanent magnet Dmout/mm | 155 |
| Inner diameter of permanent magnet Dmin/mm | 149 |
| Axial width of permanent magnet Wm/mm | 9.5 |
| Outer diameter of axial magnetic poles DZP1/mm | 65 |
| Inner diameter of axial magnetic poles DZP2/mm | 39 |
| The width between axial magnetic poles WZP/mm | 40 |
| Inner width between axial stator discs WZS1/mm | 50 |
| Outer width between axial stator discs WZS2/mm | 76 |
| Outer diameter of axial stator cylinder DZS1/mm | 170 |
| Inner diameter of axial stator cylinder DZS2/mm | 155 |
| Parameters | Value |
|---|---|
| Radial and axial air gap length δr, δZ/mm | 0.5 |
| Saturation flux density BS/T | 0.8 |
| The area of radial magnetic poles SrP/mm2 | 524 |
| The area of axial magnetic poles SZP/mm2 | 1572 |
| The max ampere-turns of radial coils Nrirmax/At | 160 |
| The max ampere-turns of axial coils Nrirmax/At | 320 |
| Magnetomotive force of permanent magnet Θm/At | 320 |
| Outer diameter of rotor DRot1/mm | 77 |
| Inner diameter of rotor DRot2/mm | 39 |
| Axial width of rotor WRot/mm | 32 |
| Outer diameter of radial stator yoke Dr1/mm | 142 |
| Inner diameter of radial stator yoke Dr2/mm | 118 |
| Inner diameter of radial magnetic poles Dr3/mm | 82 |
| Radial width of radial magnetic poles WrP/mm | 78 |
| Axial width of radial stator LrP/mm | 22 |
| Outer diameter of permanent magnet Dmout/mm | 145 |
| Inner diameter of permanent magnet Dmin/mm | 142 |
| Axial width of permanent magnet Wm/mm | 10.5 |
| Outer diameter of axial magnetic poles DZP1/mm | 75 |
| Inner diameter of axial magnetic poles DZP2/mm | 60 |
| The width between axial magnetic poles WZP/mm | 33 |
| Inner width between axial stator discs WZS1/mm | 49 |
| Inner diameter of axial stator cylinder DZS2/mm | 145 |
| Outer width between axial stator discs WZS2/mm | 64 |
| Outer diameter of axial stator cylinder DZS1/mm | 153 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, J.; Zhu, H. Radial Force-Current Characteristics Analysis of Three-Pole Radial-Axial Hybrid Magnetic Bearings and Their Structure Improvement. Energies 2016, 9, 706. https://doi.org/10.3390/en9090706
Ju J, Zhu H. Radial Force-Current Characteristics Analysis of Three-Pole Radial-Axial Hybrid Magnetic Bearings and Their Structure Improvement. Energies. 2016; 9(9):706. https://doi.org/10.3390/en9090706
Chicago/Turabian StyleJu, Jintao, and Huangqiu Zhu. 2016. "Radial Force-Current Characteristics Analysis of Three-Pole Radial-Axial Hybrid Magnetic Bearings and Their Structure Improvement" Energies 9, no. 9: 706. https://doi.org/10.3390/en9090706