
Analytical Investigation of the Magnetic-Field Distribution in an Axial Magnetic-Field-Modulated Brushless Double-Rotor Machine


Abstract
:
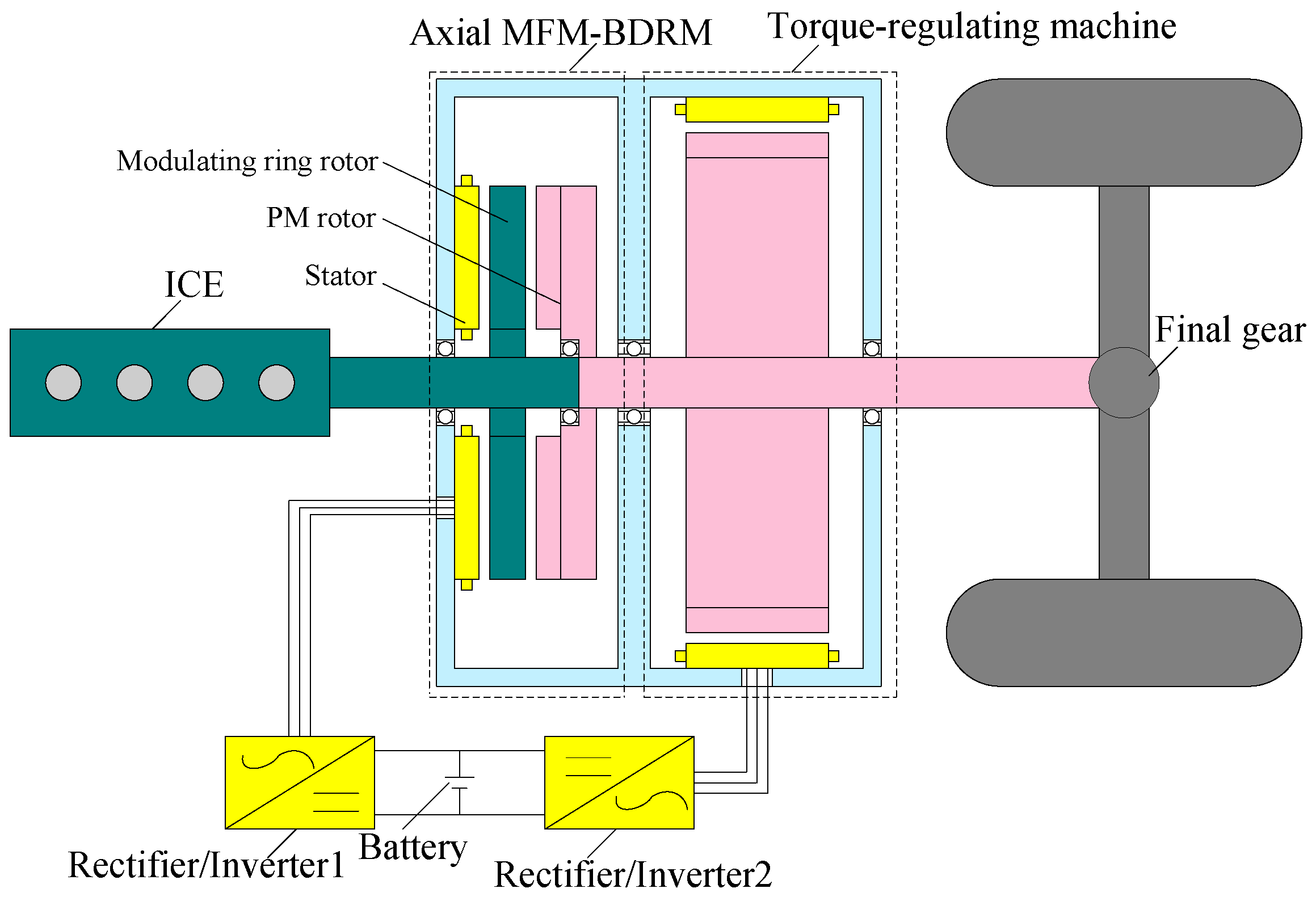
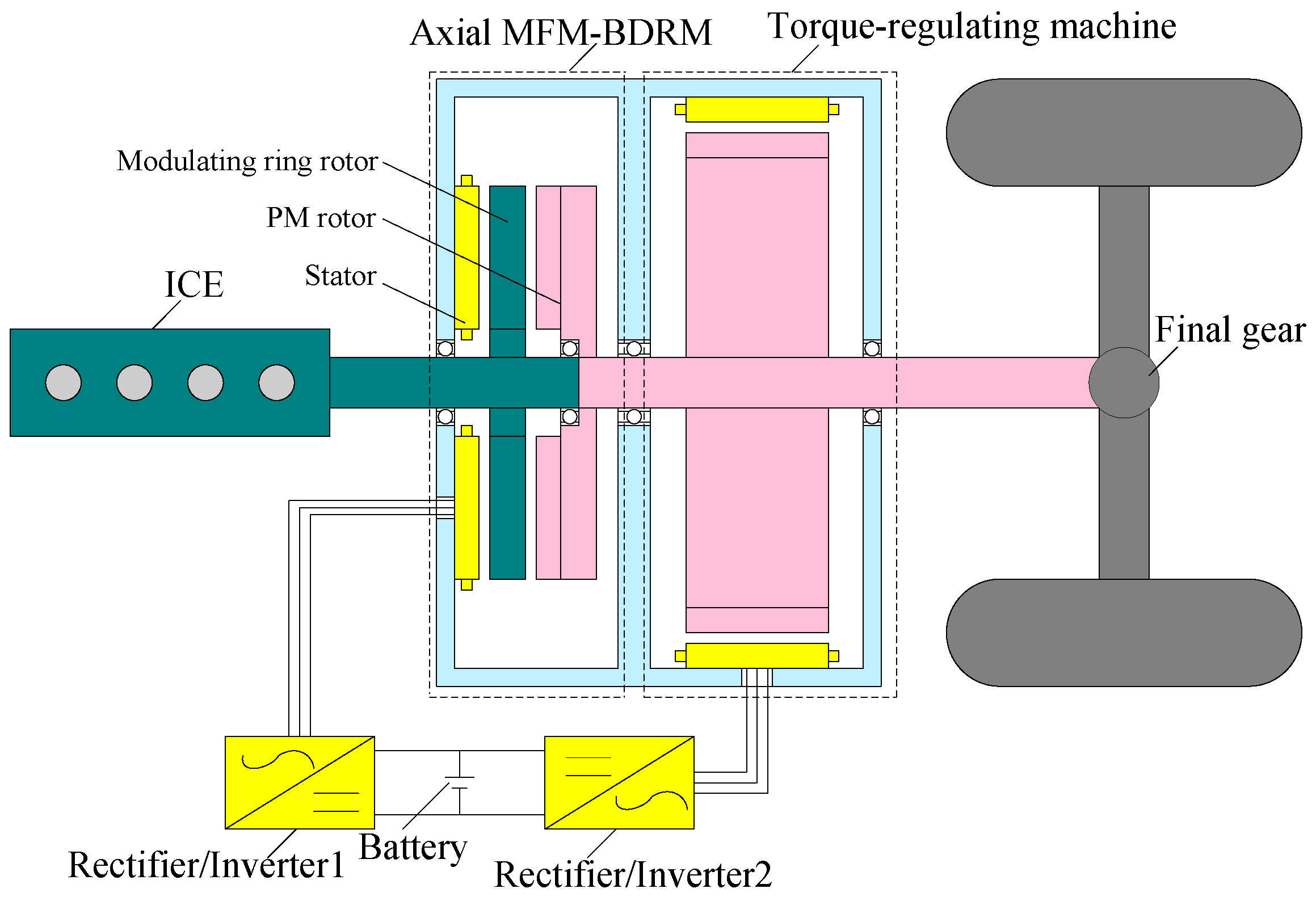
1. Introduction
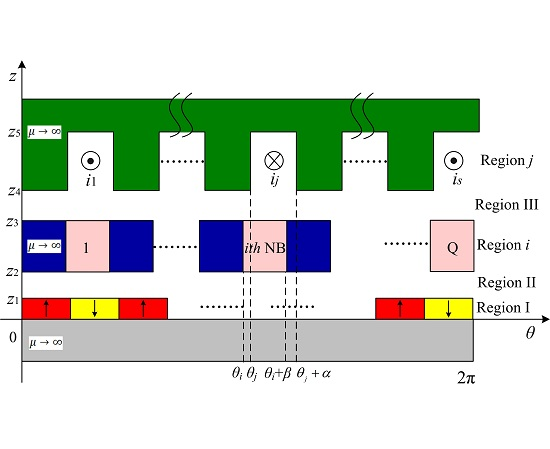
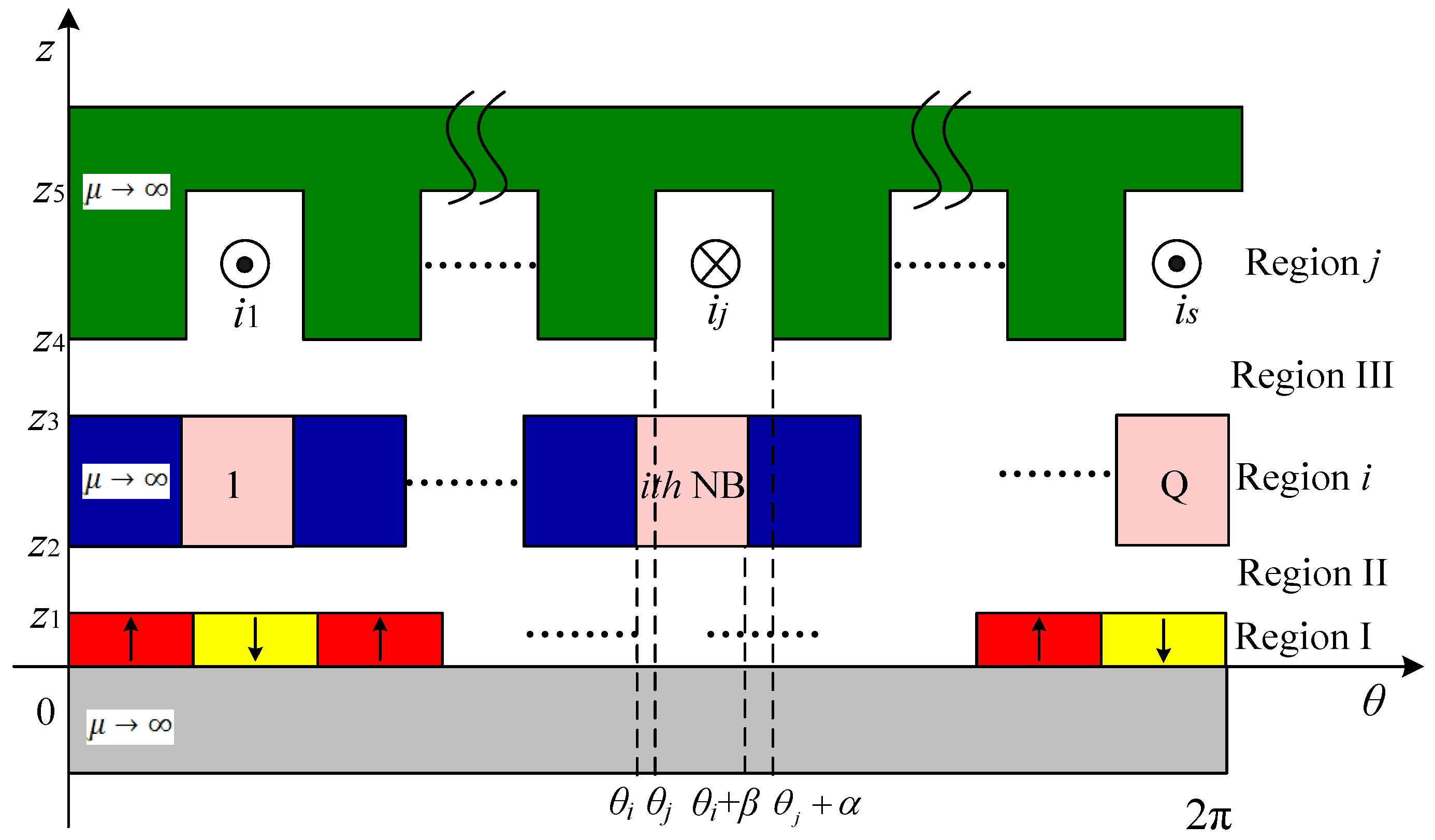
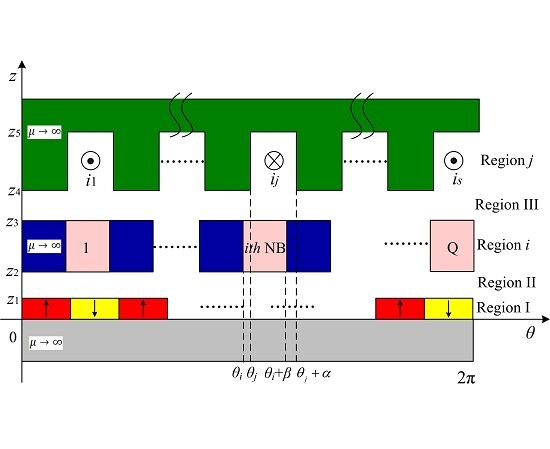
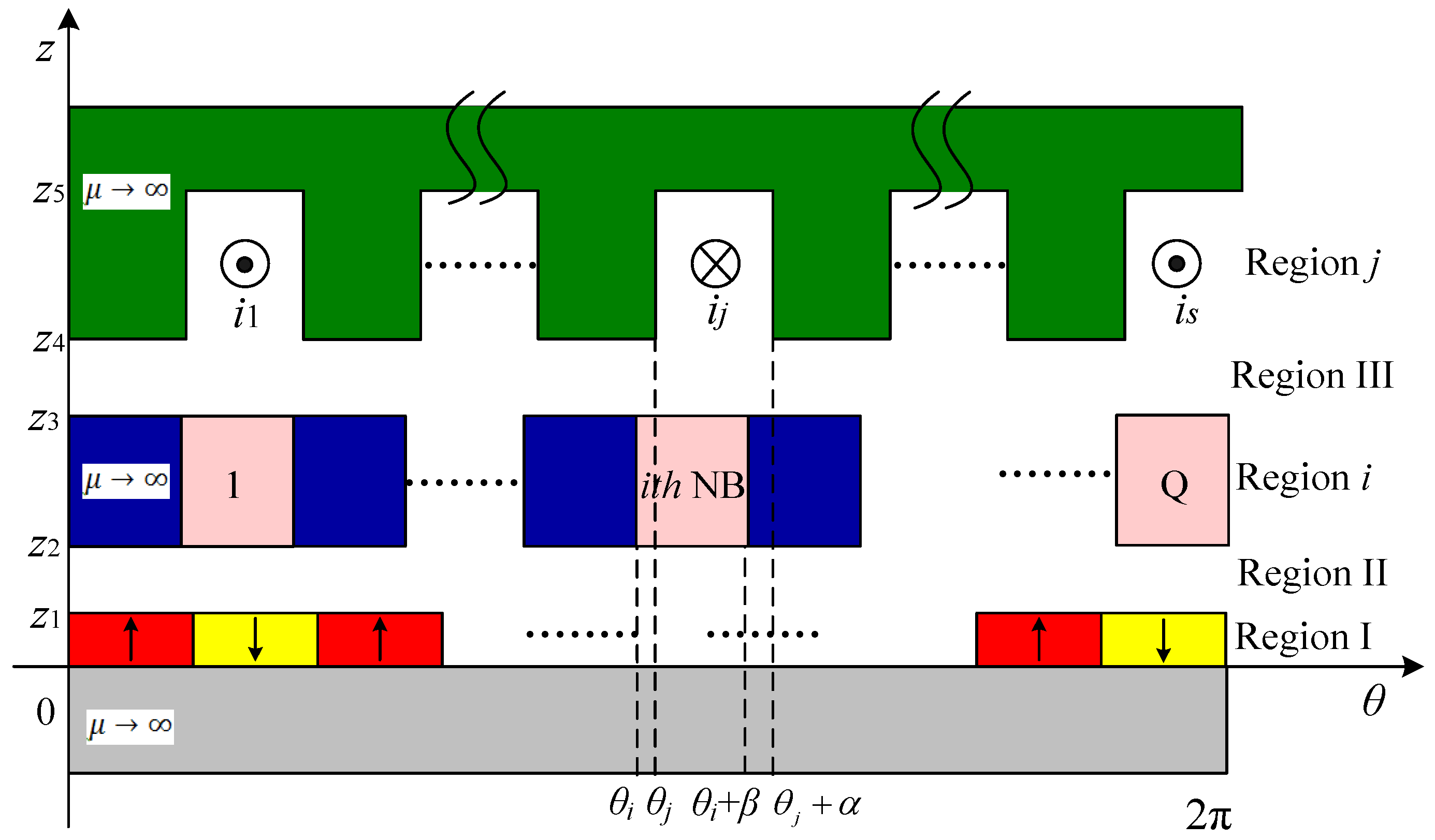
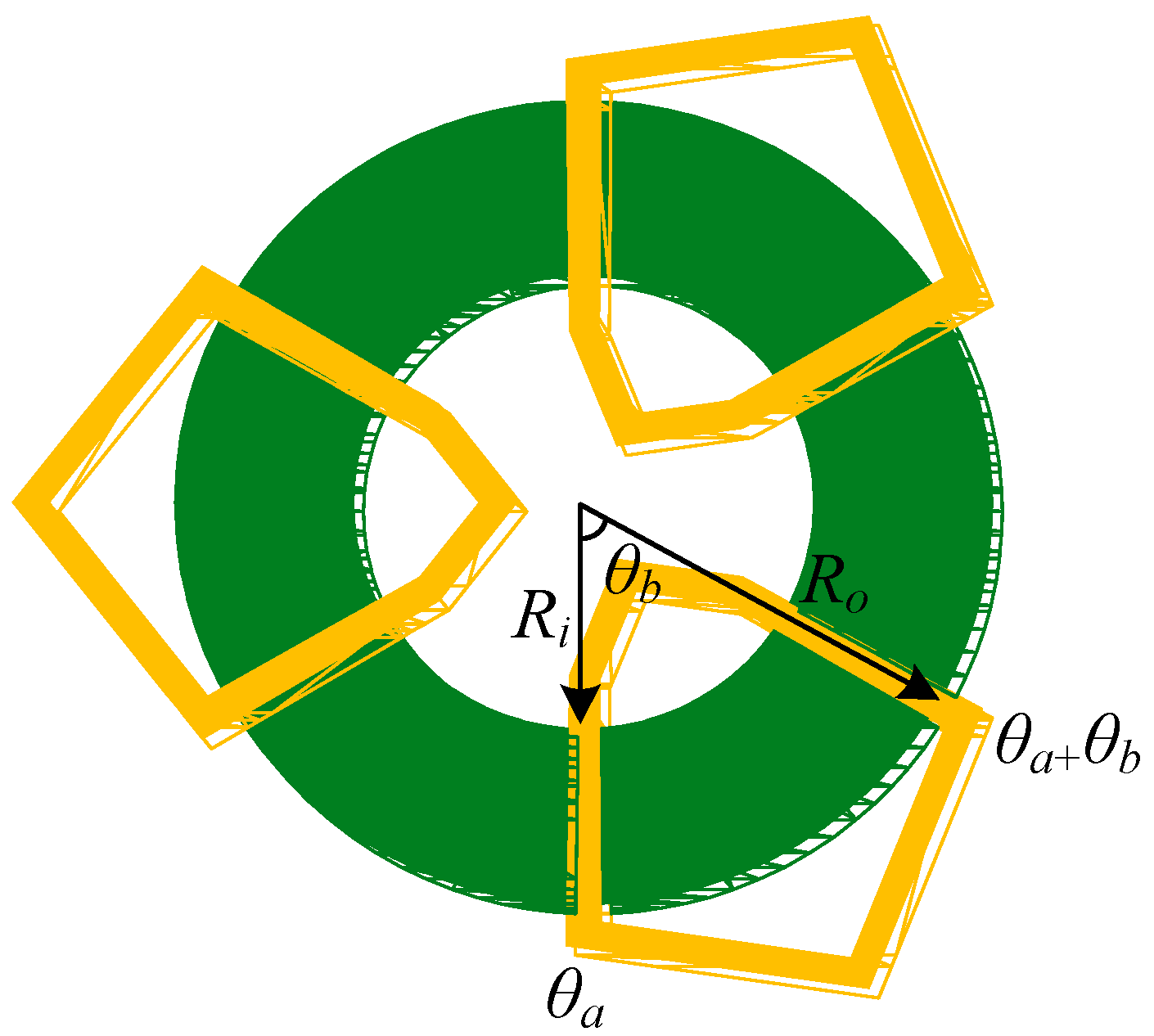
2. Analytical Modeling
- (1)
- The soft-magnetic material (iron) has infinite magnetic permeability μ → ∞;
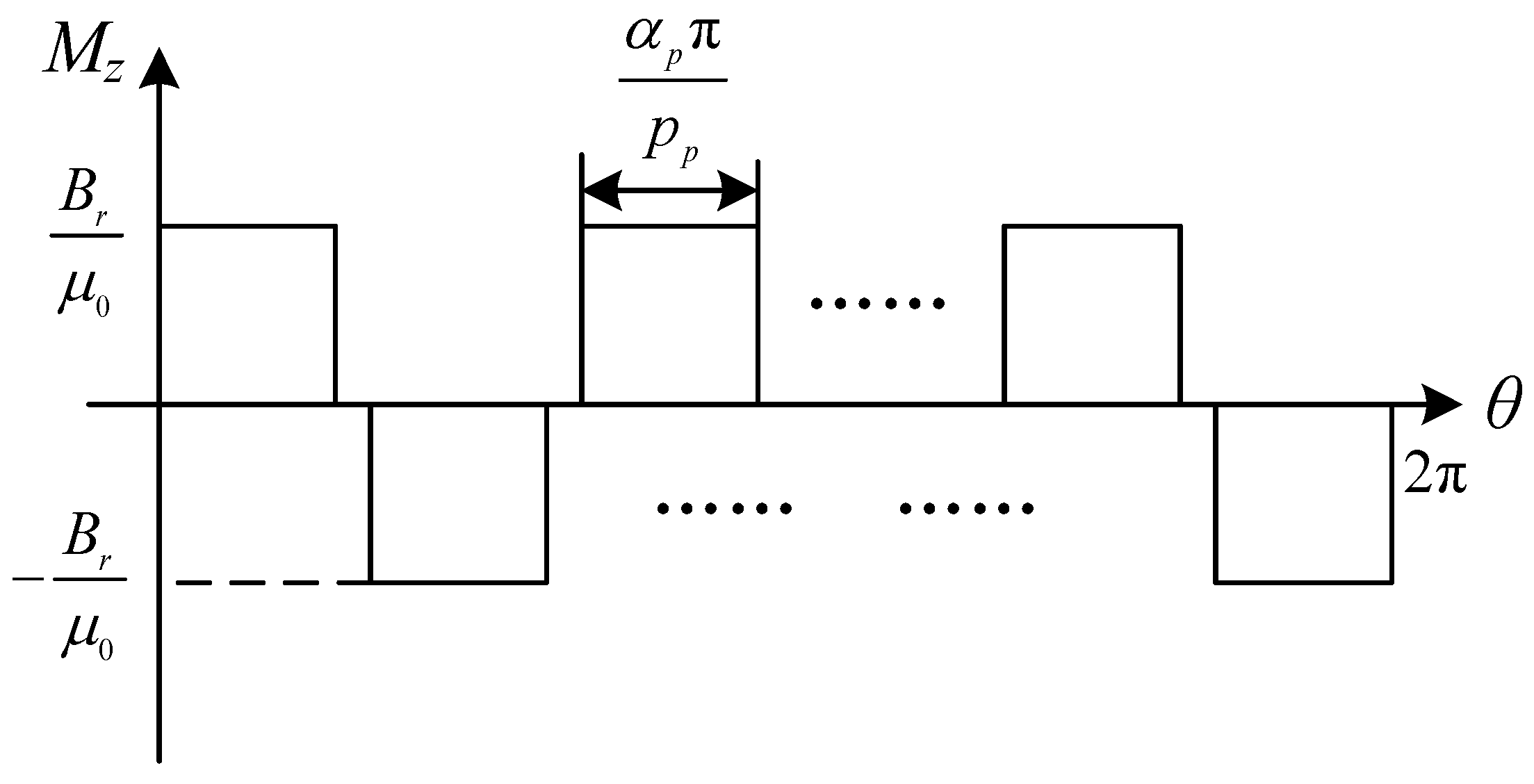
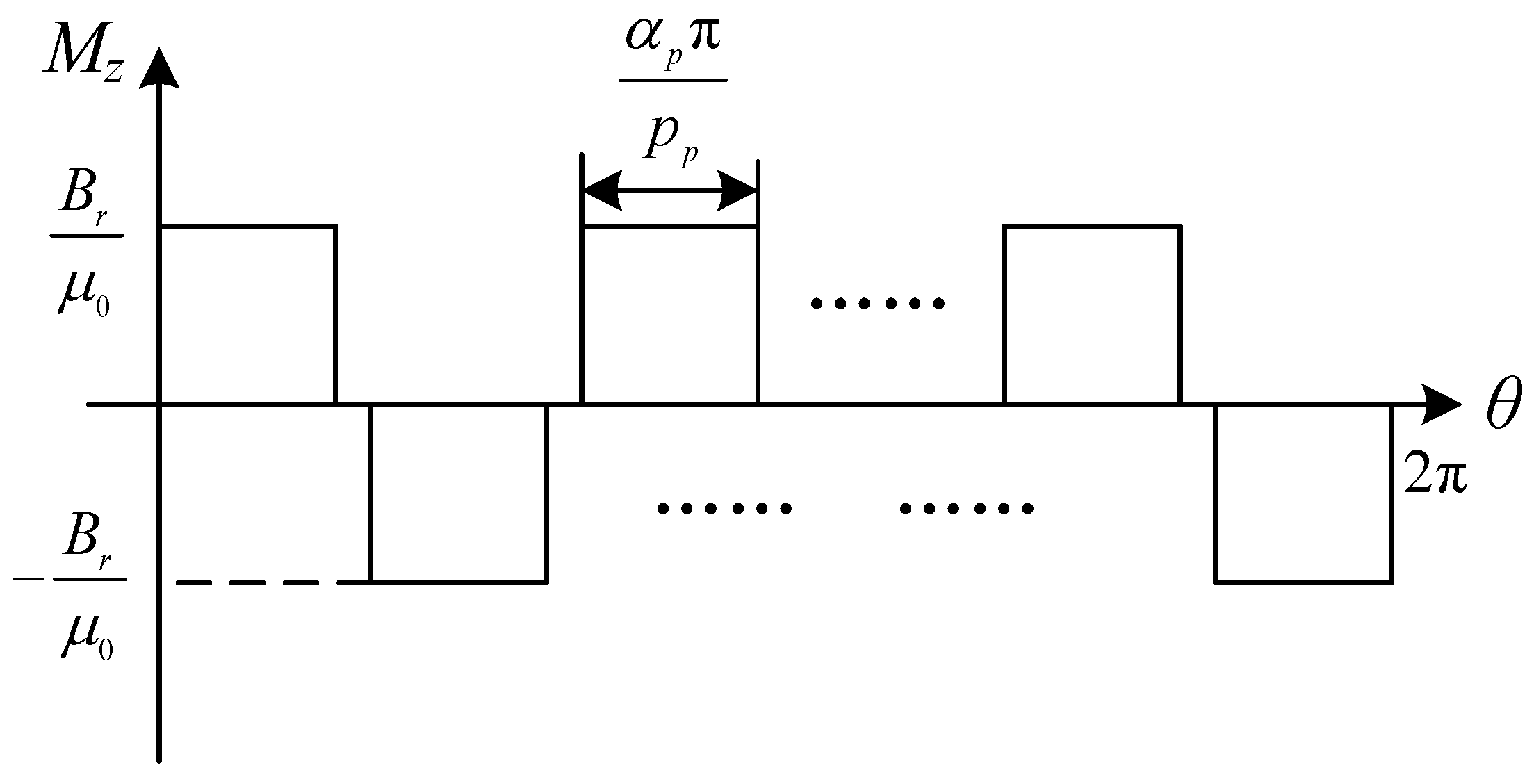
- (2)
- The PMs are axially magnetized with relative permeability μr = 1.
3. Analytical Solution
3.1. Governing Partial Differential Equations
3.2. Boundary Conditions
3.2.1. At the Interface z = 0
3.2.2. At the Interface z = z1
3.2.3. At the Interface z = z2
3.2.4. At the Interface z = z3
3.2.5. At the Interface z = z4
3.2.6. At the Interface z = z5
3.2.7. At the Interface θ = θi and θ = θi + β
3.2.8. At the Interface θ = θj and θ = θj + α
3.3. General Solutions
3.4. Magnetic-Field Distribution in Two Air Gaps
3.5. No-Load Back Electromotive Force
3.6. Torque and Axial Force
4. Analytical Method Evaluation
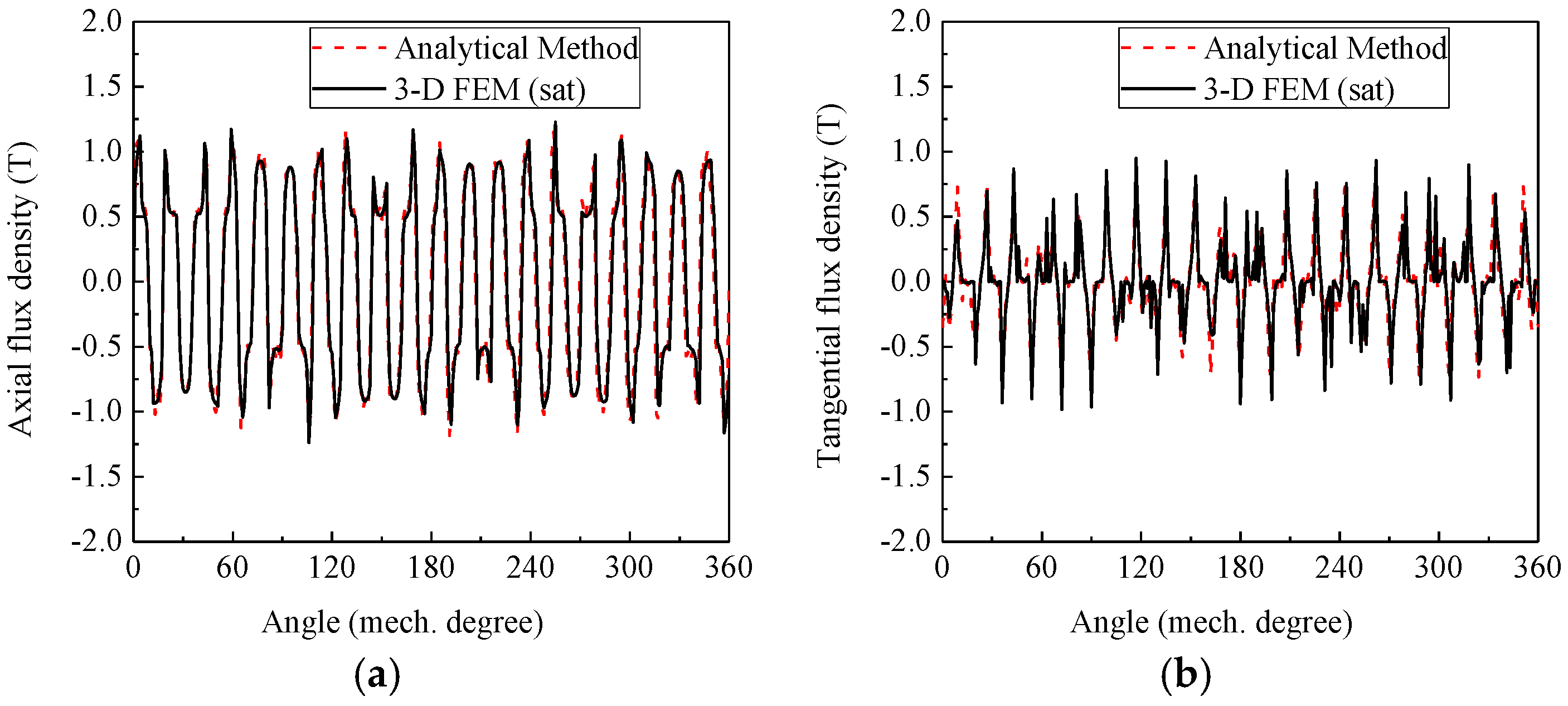
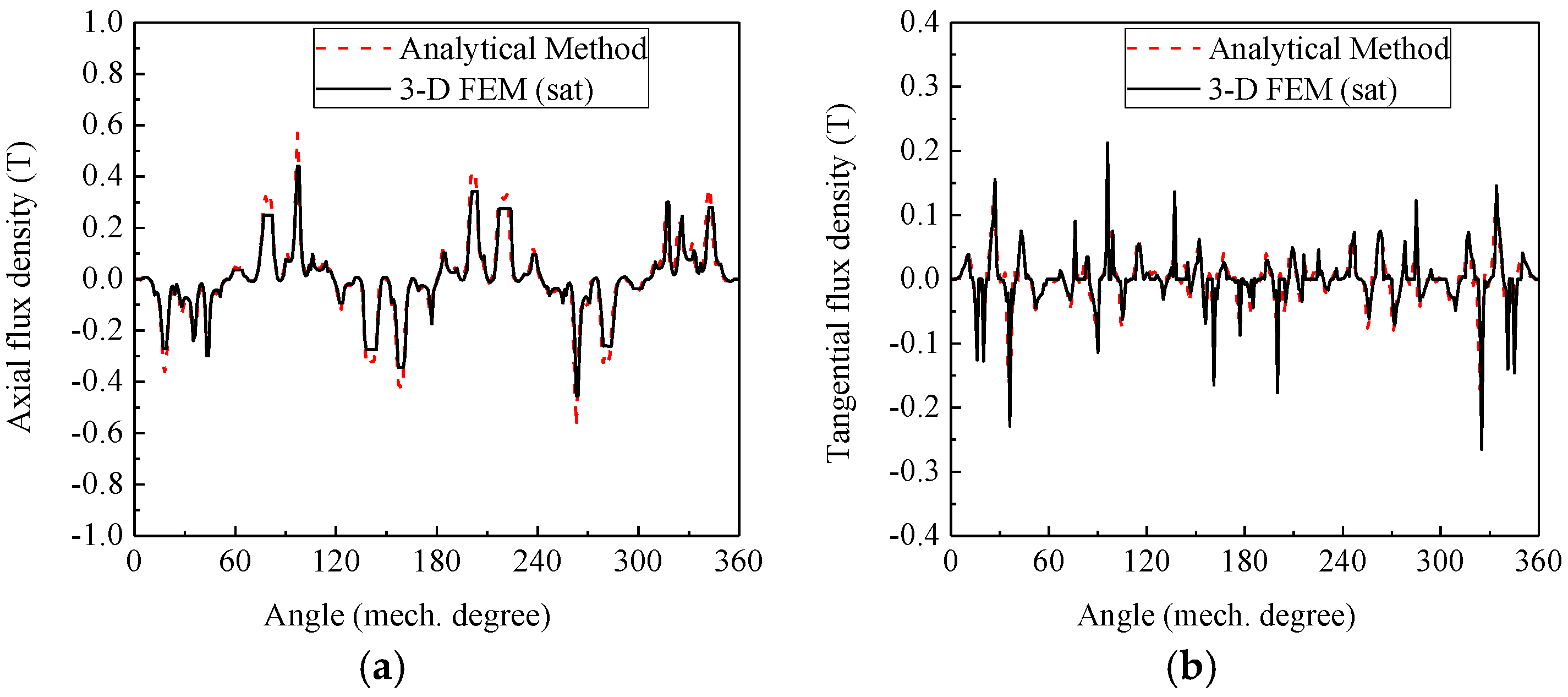
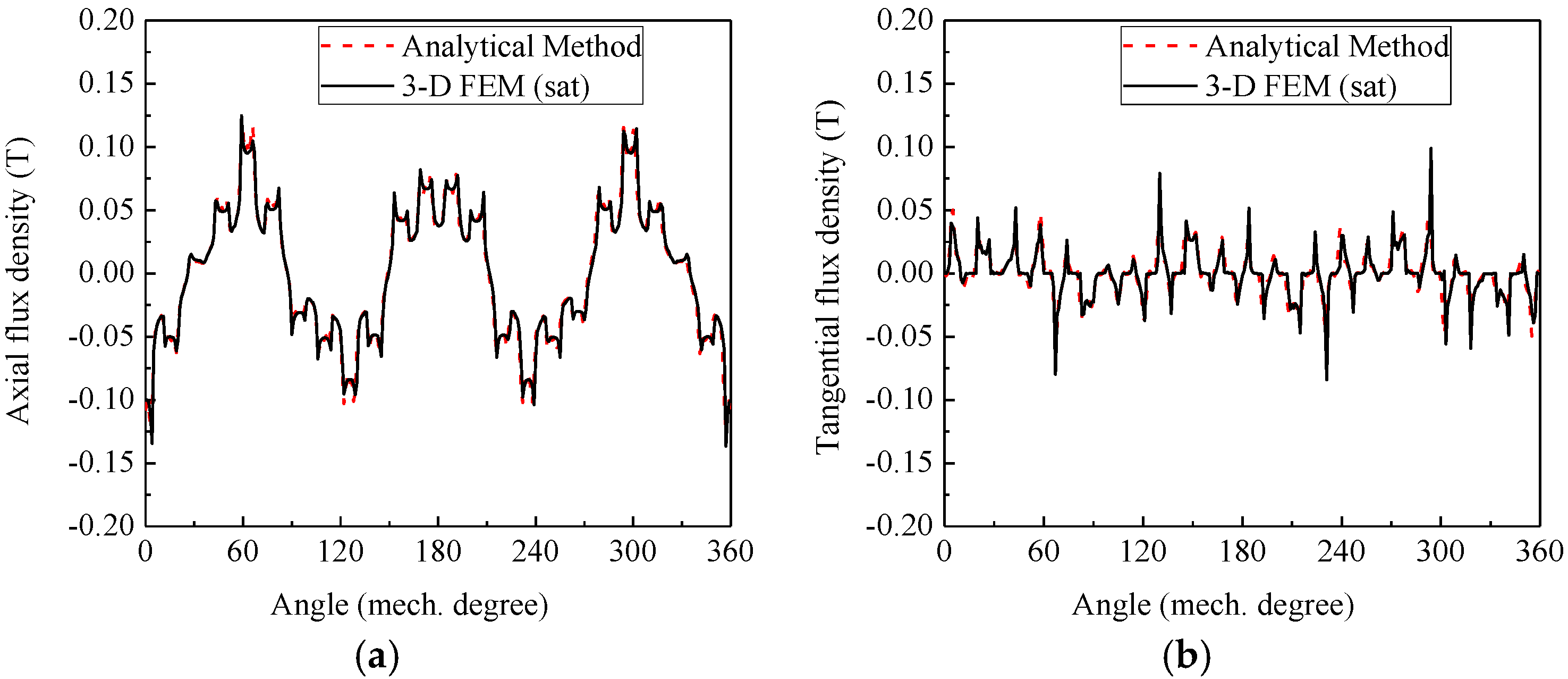
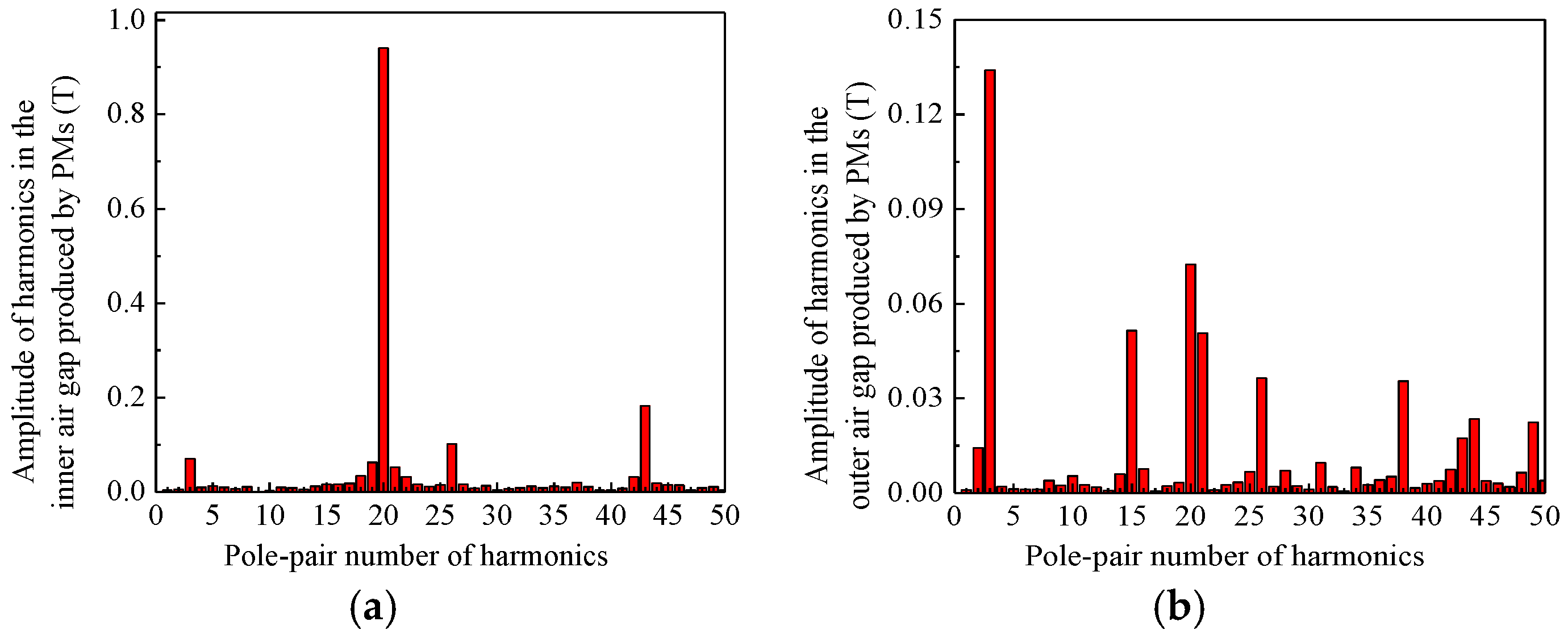
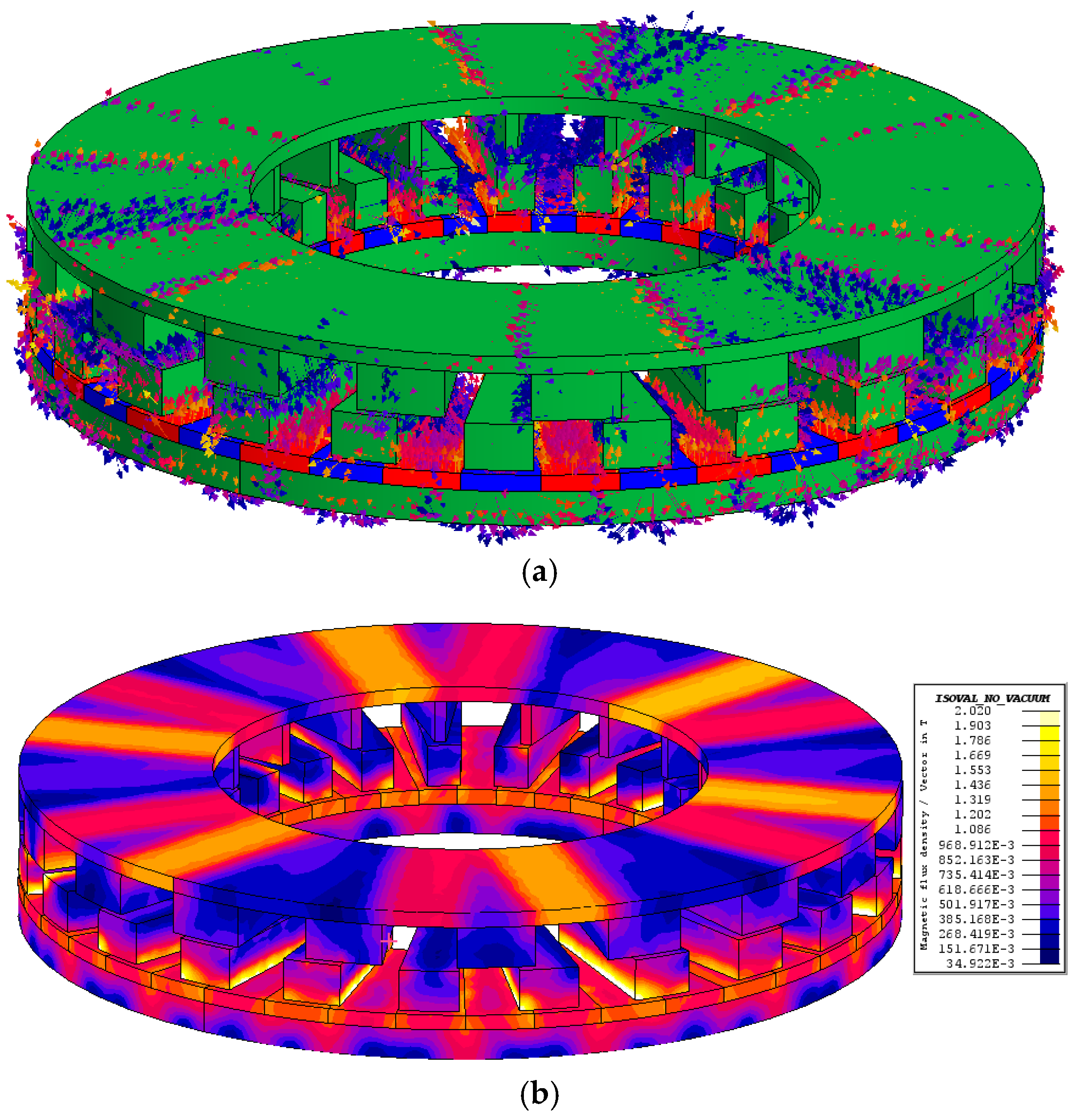
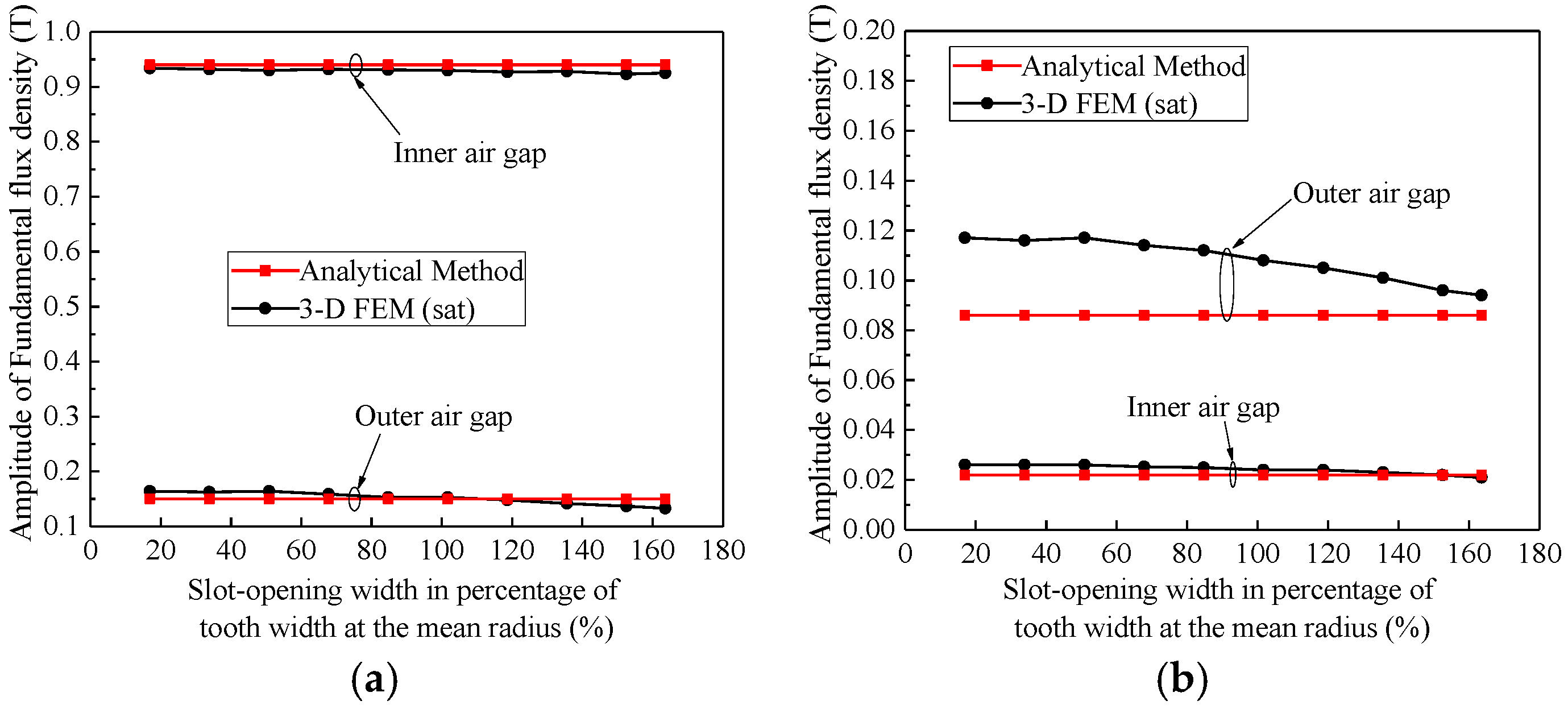
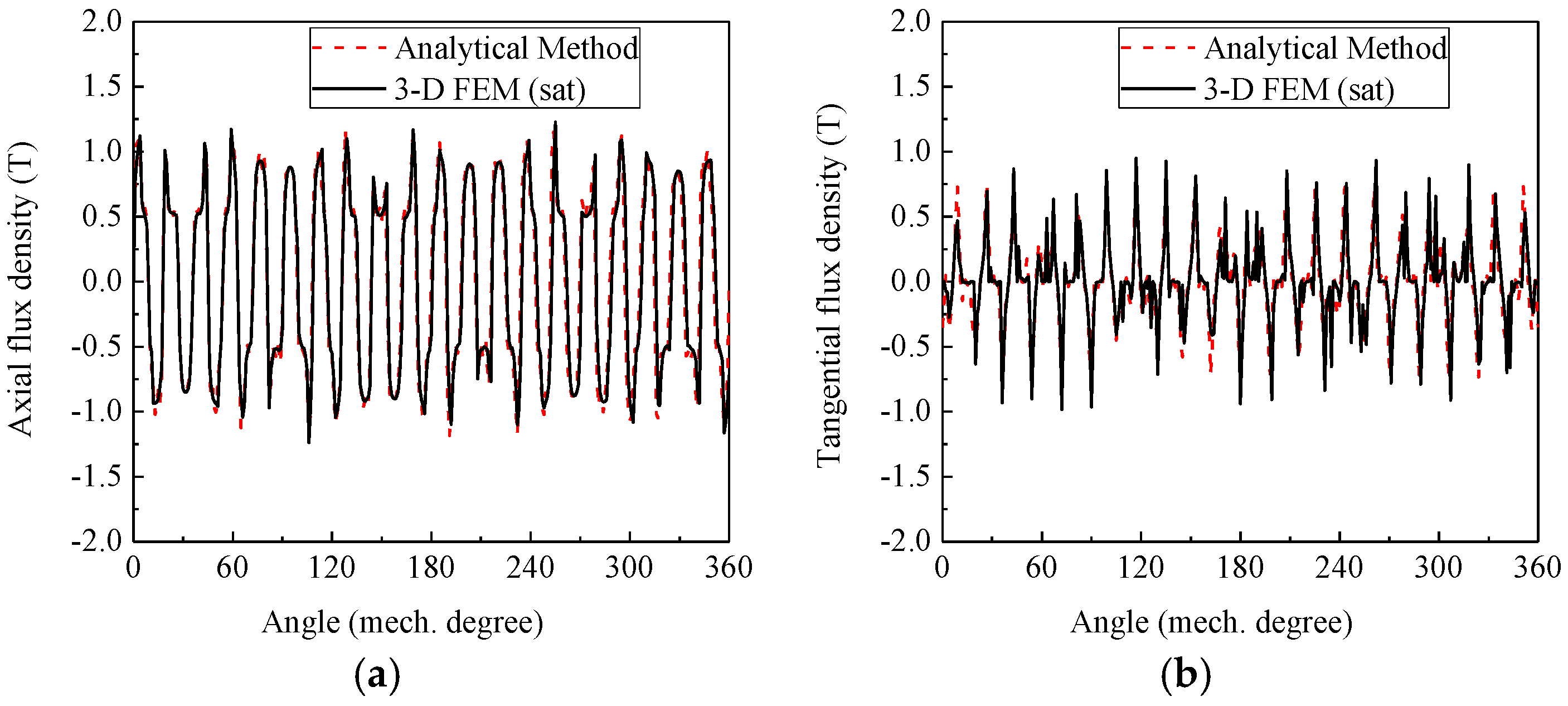
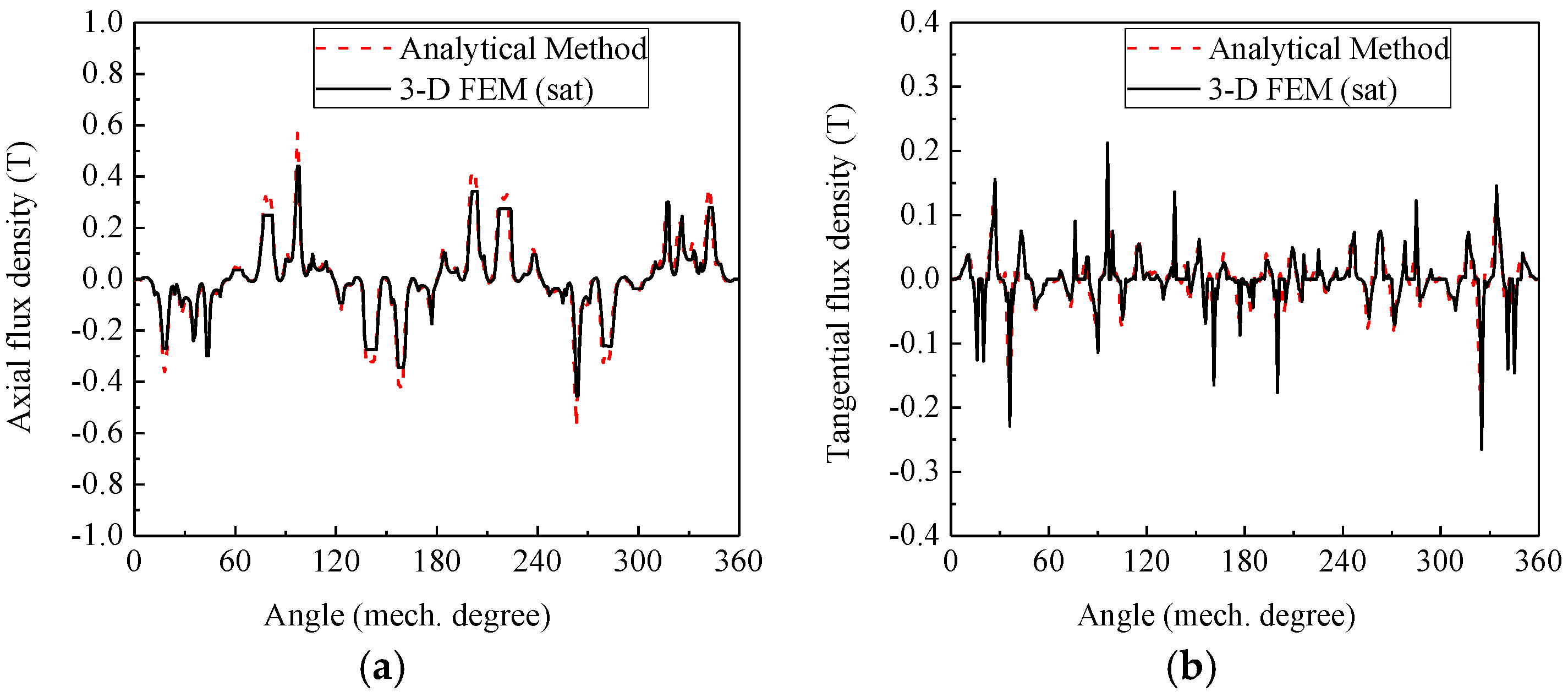
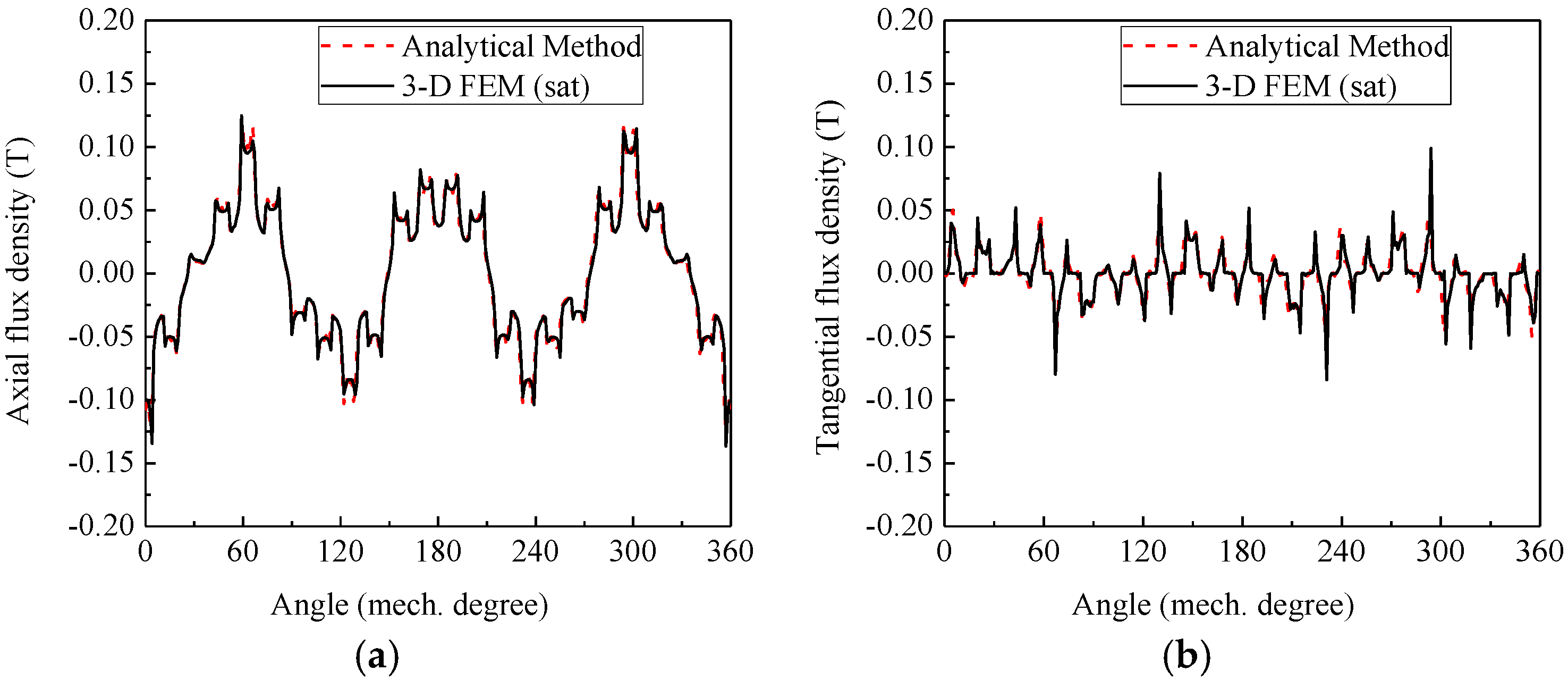
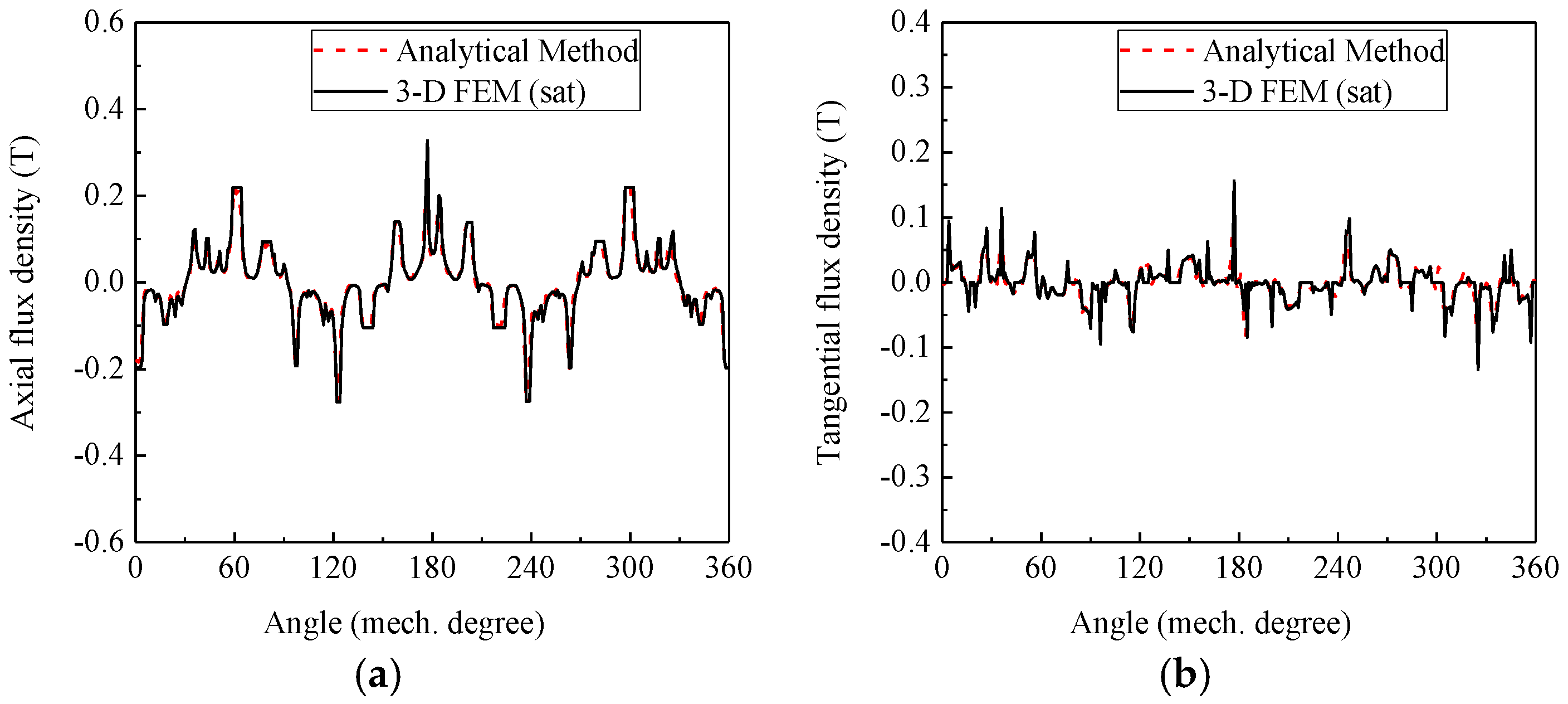
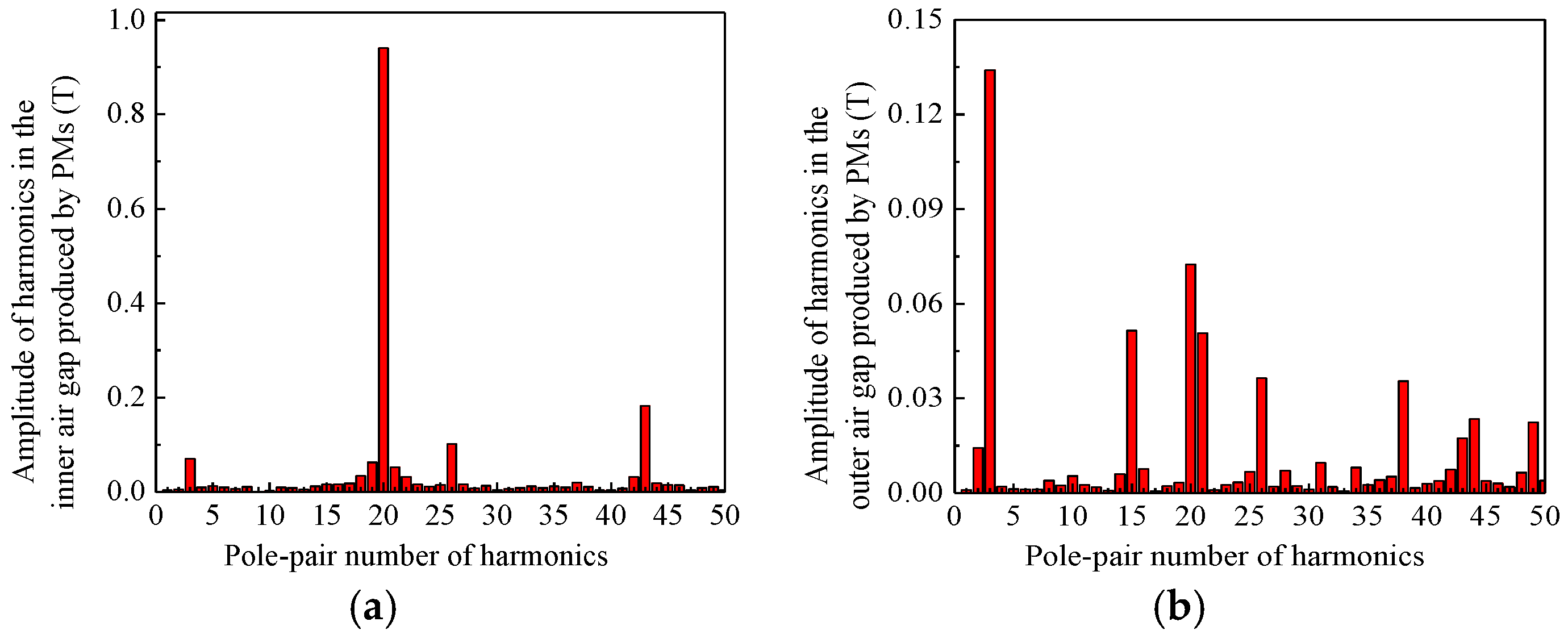
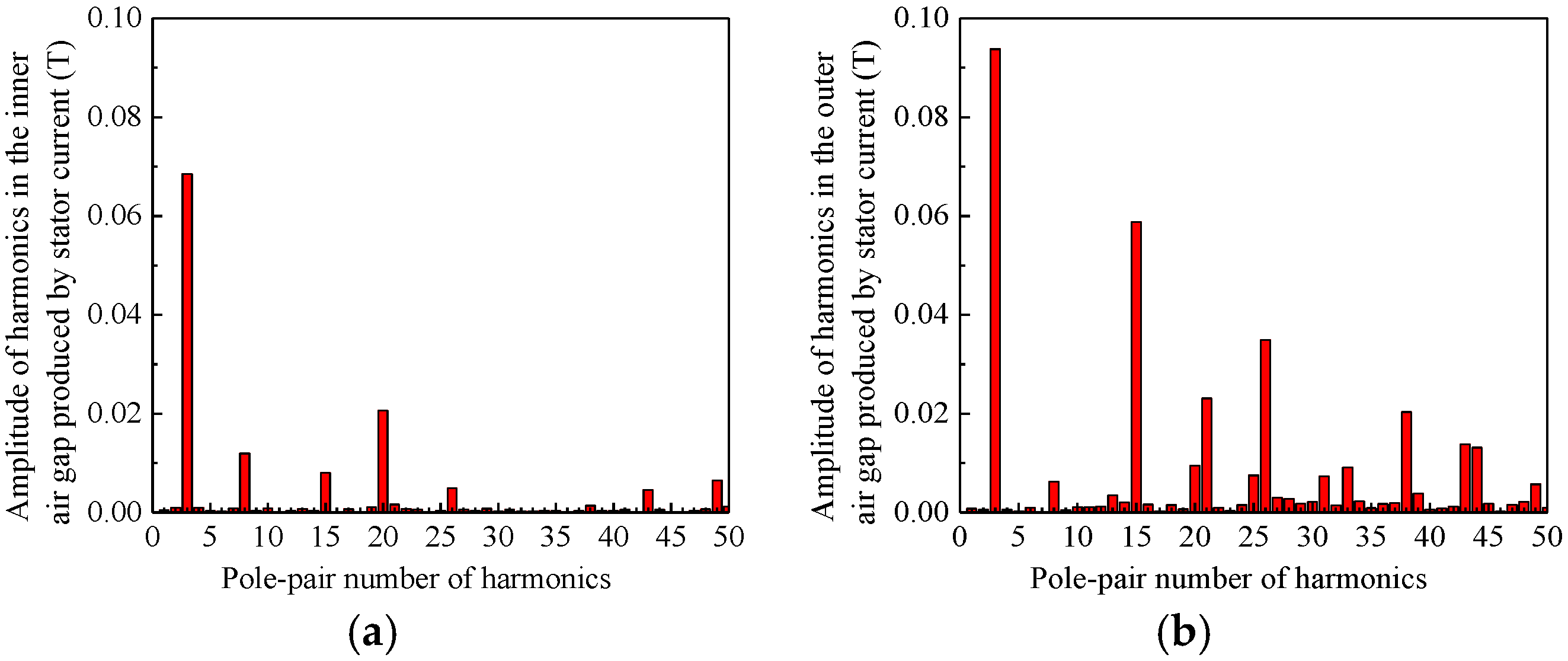
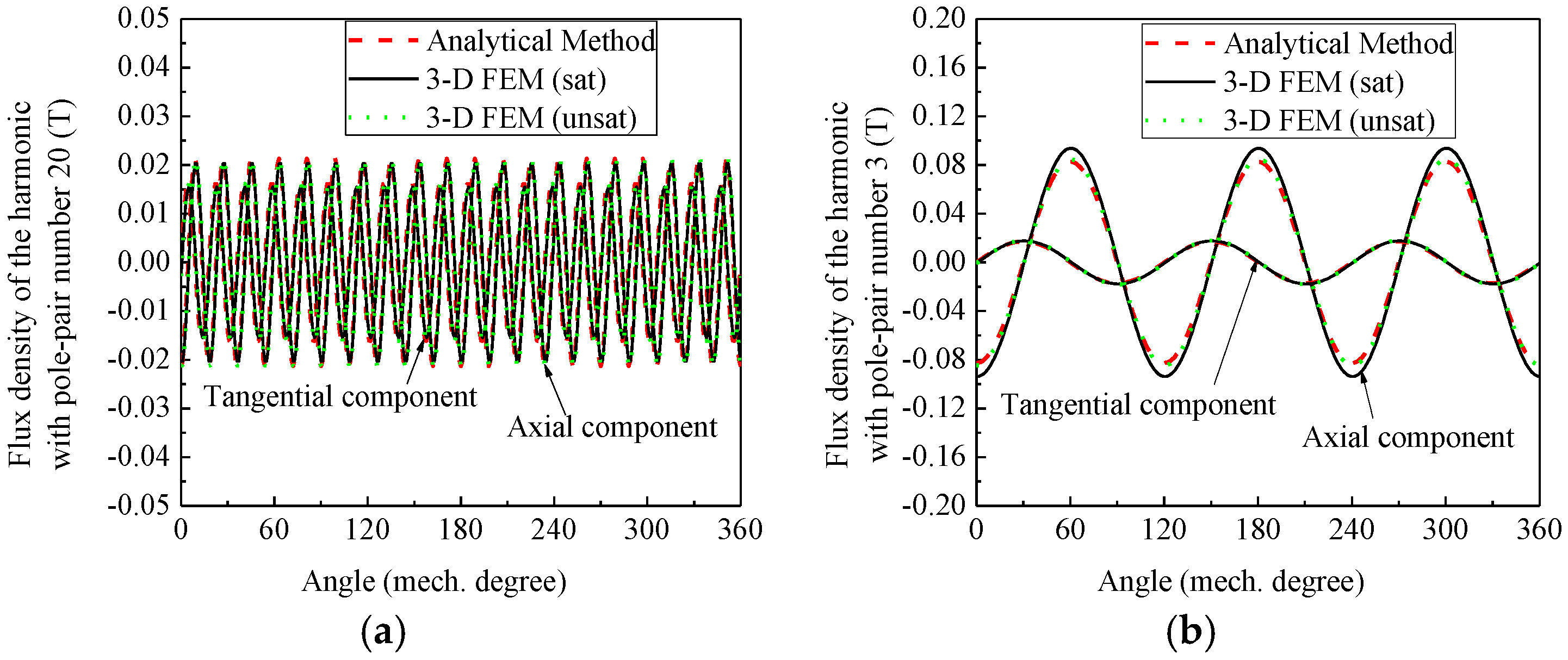
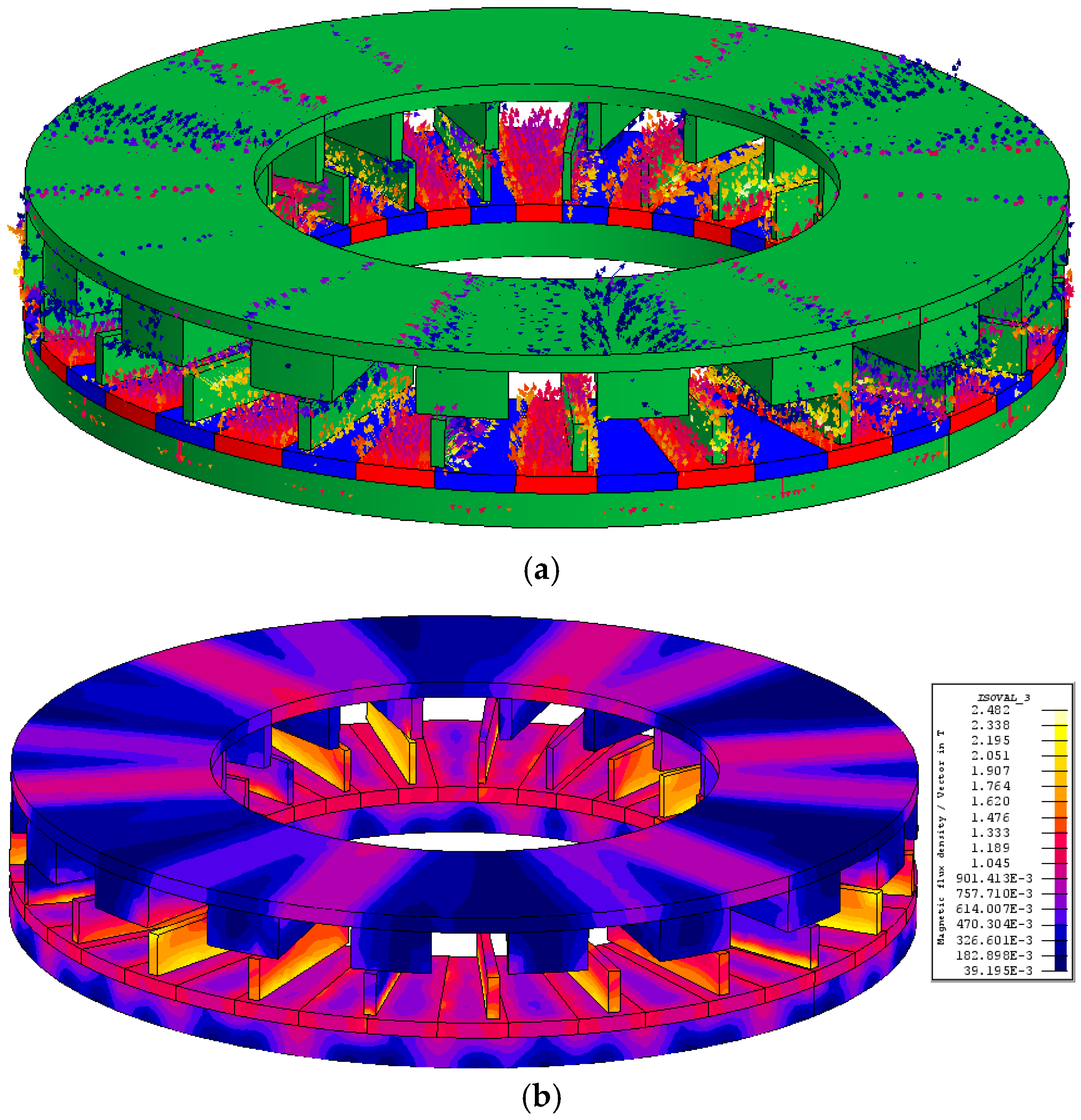
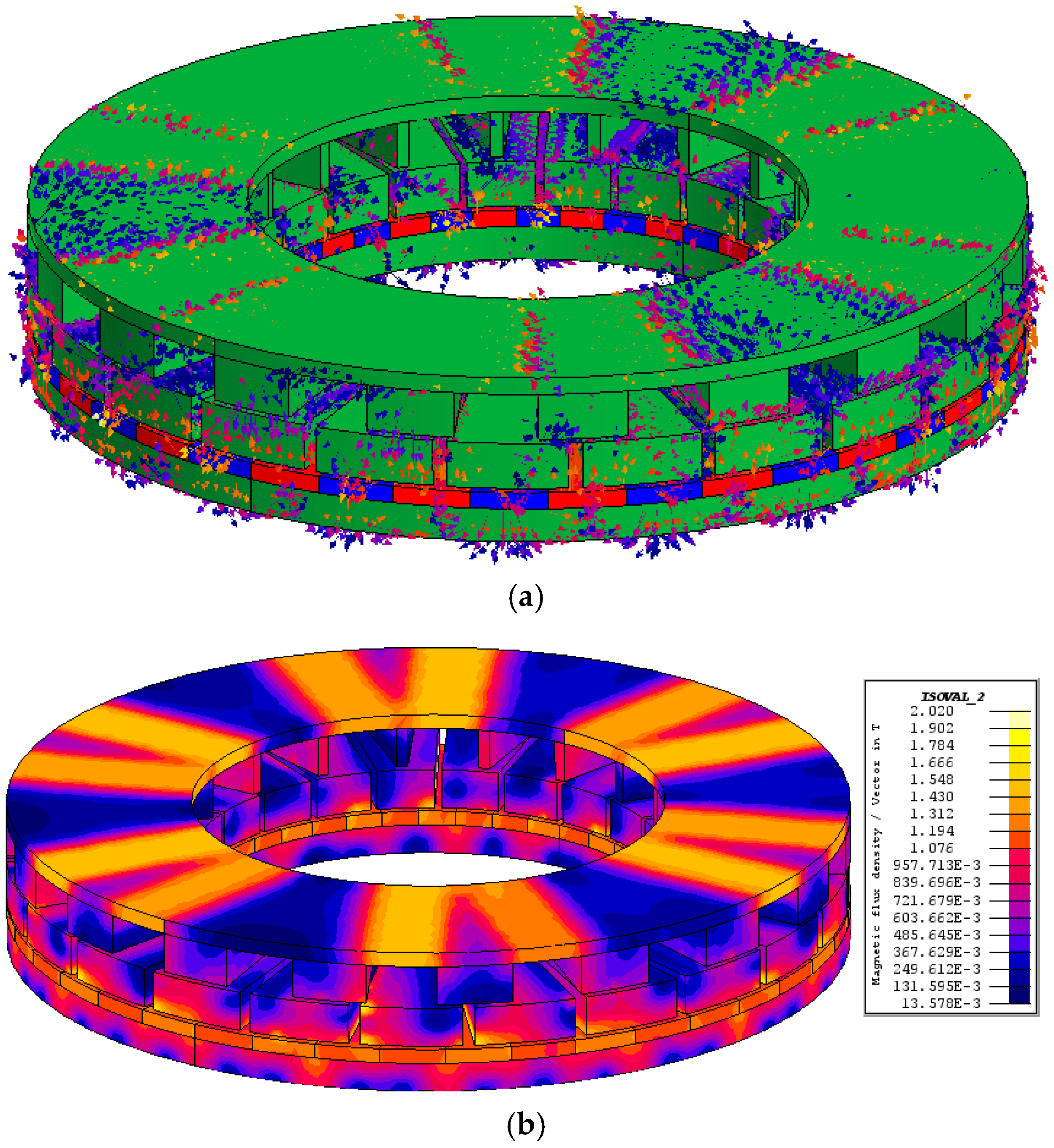
4.1. Magnetic-Field Distribution
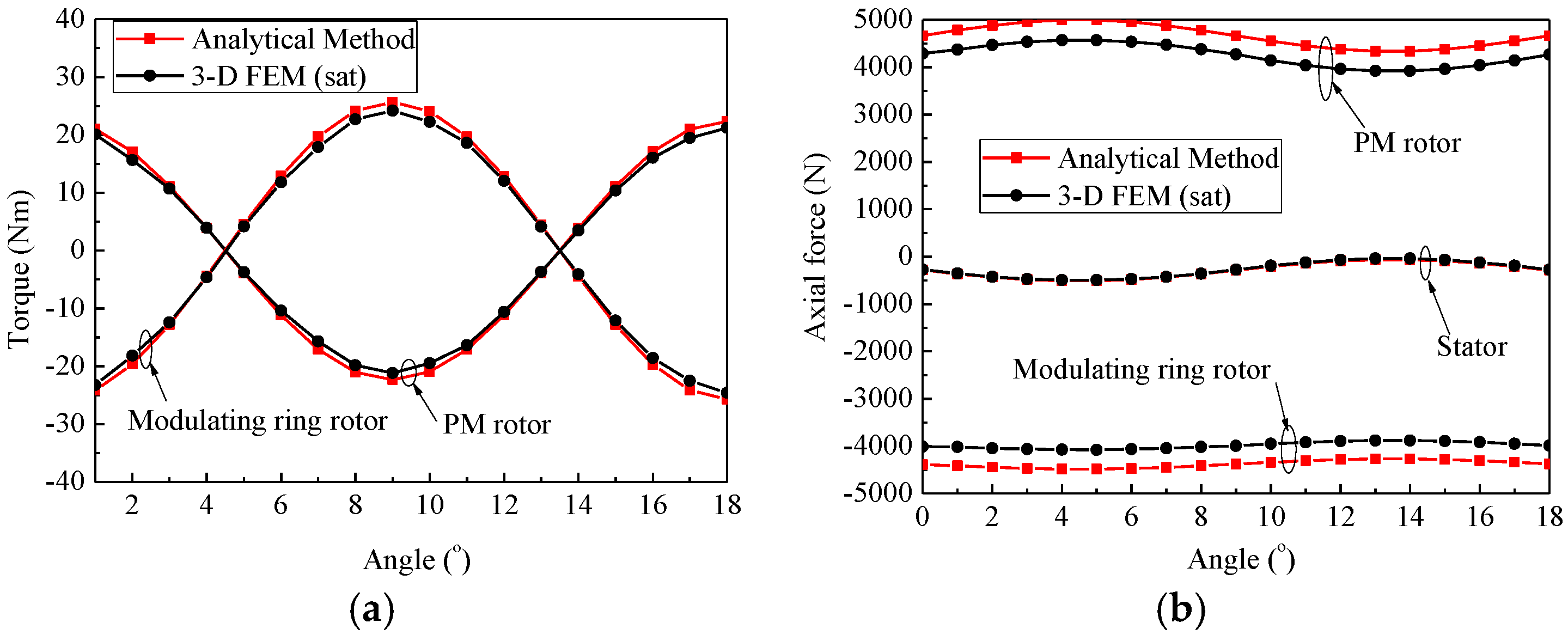
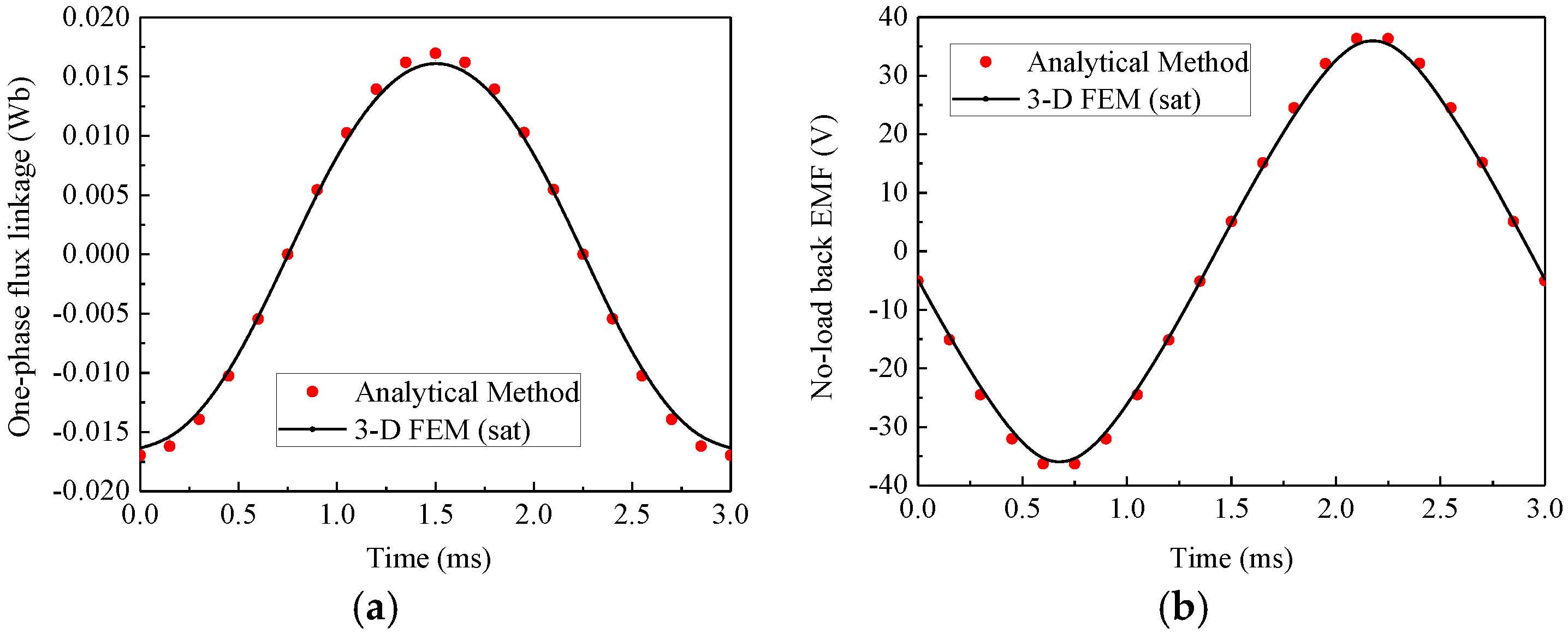
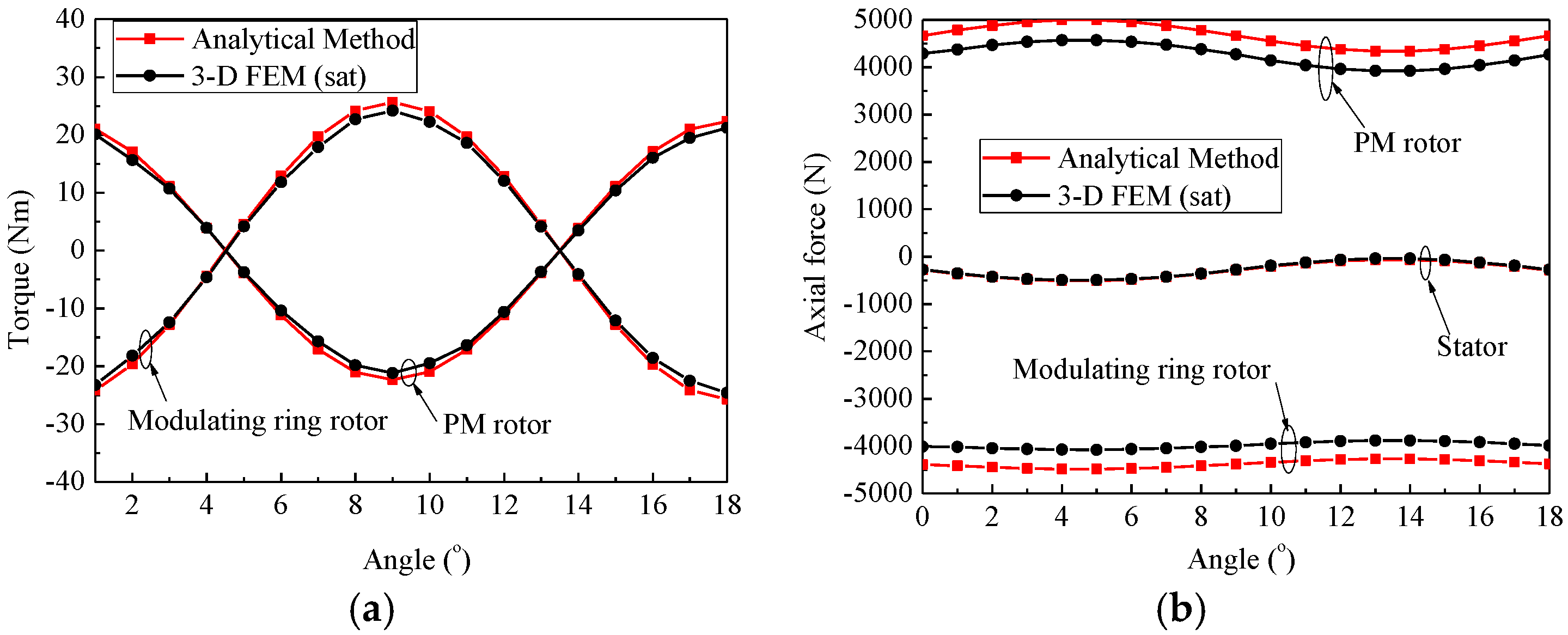
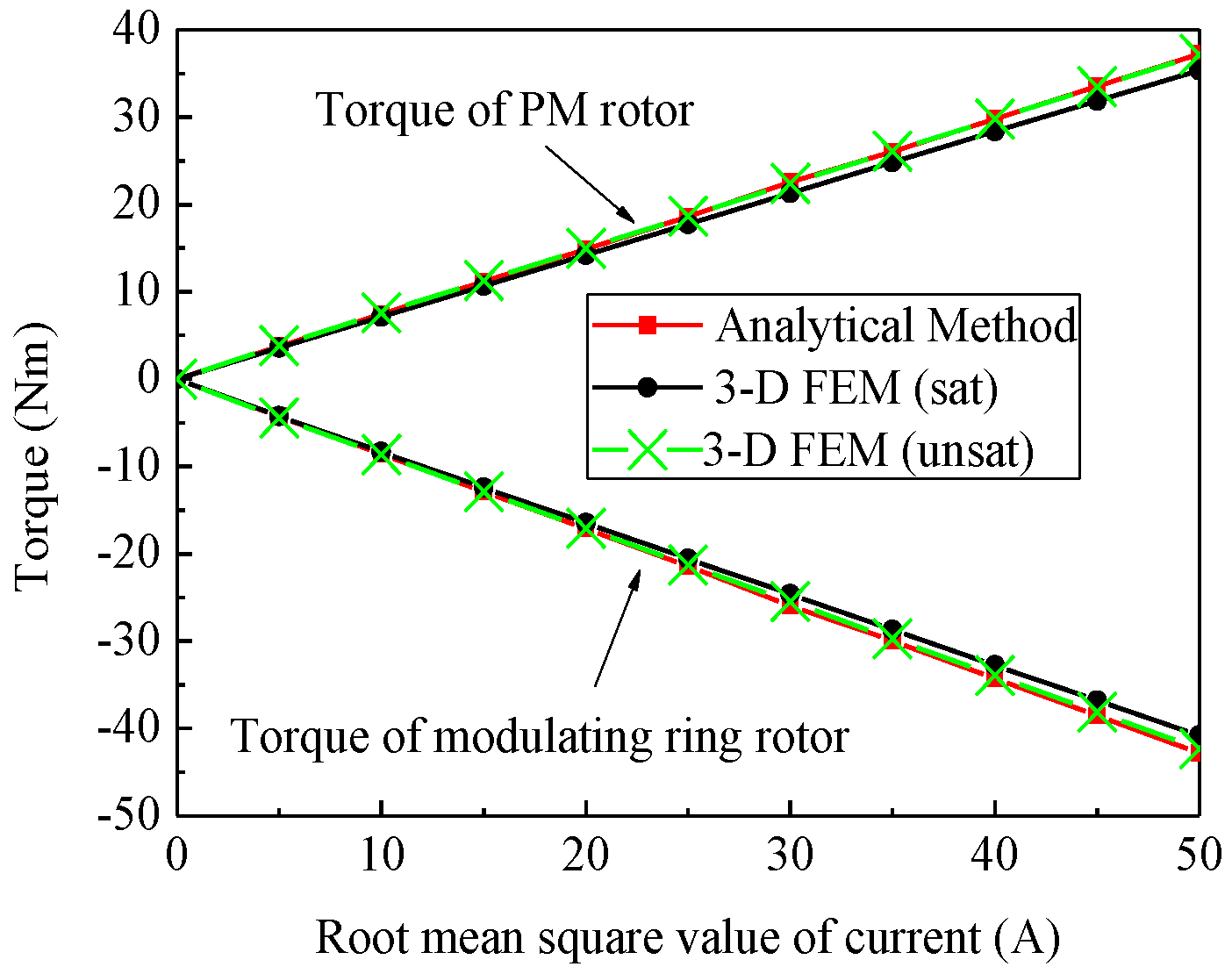
4.2. Electromagnetic Performance Prediction
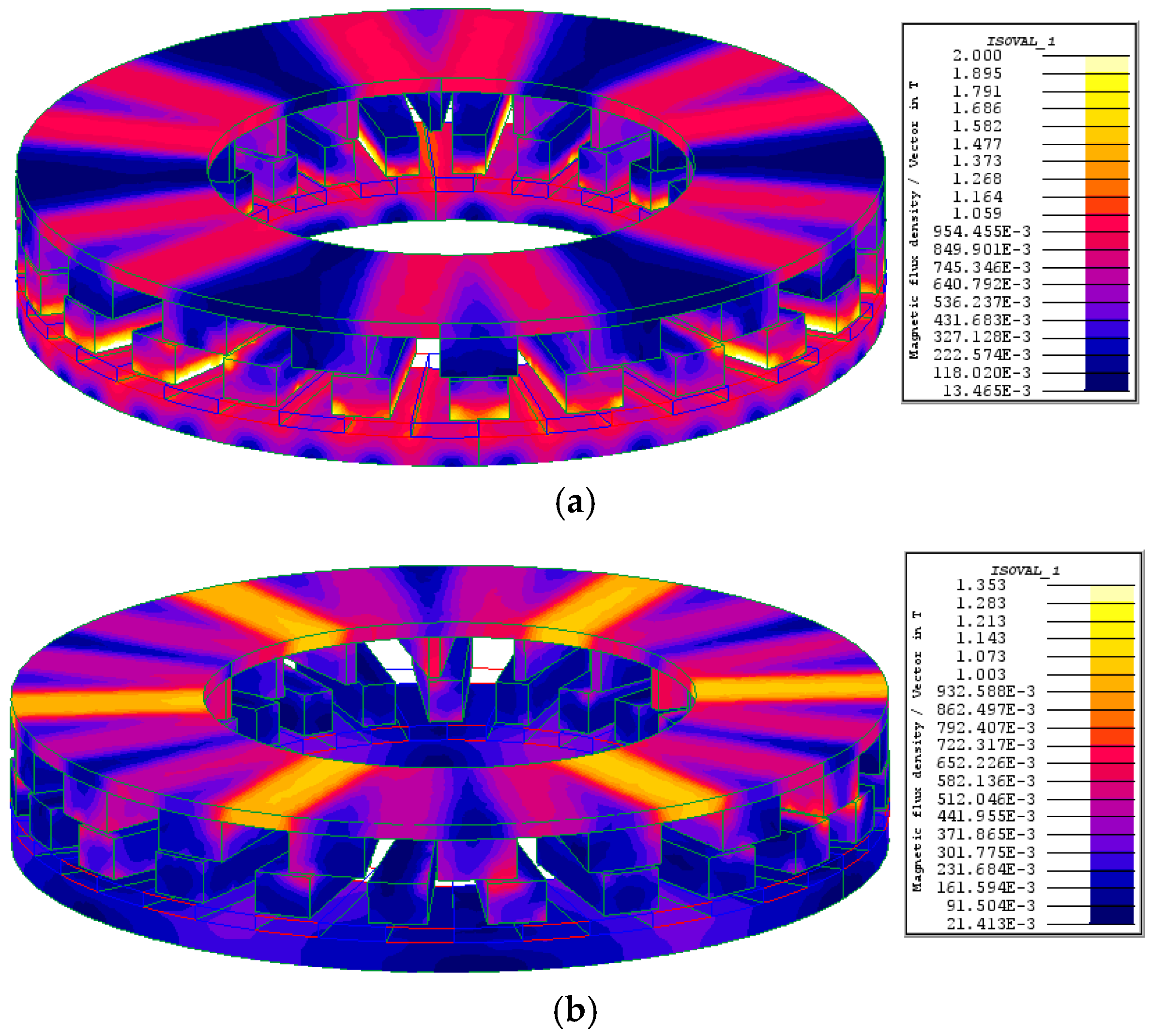
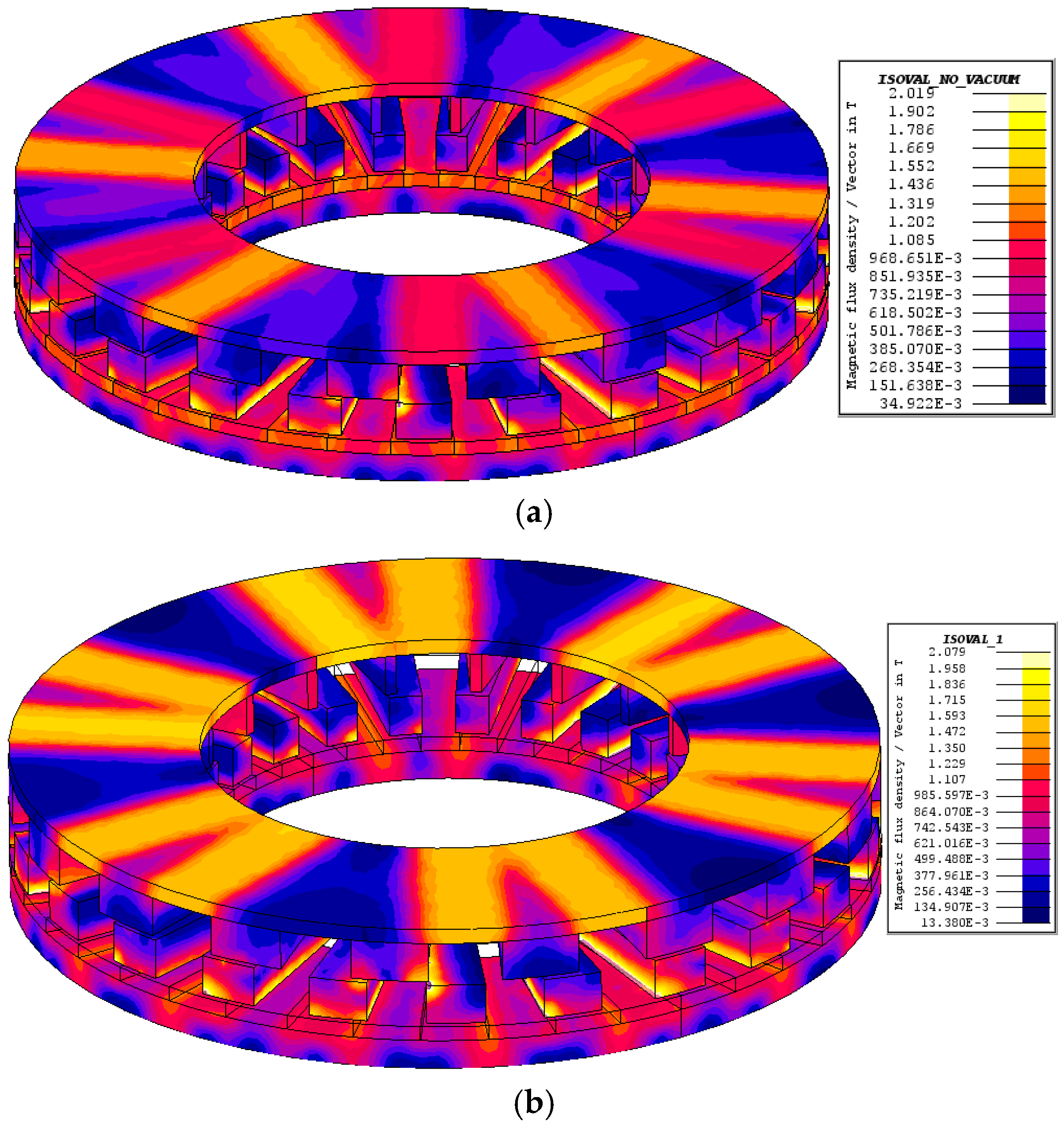
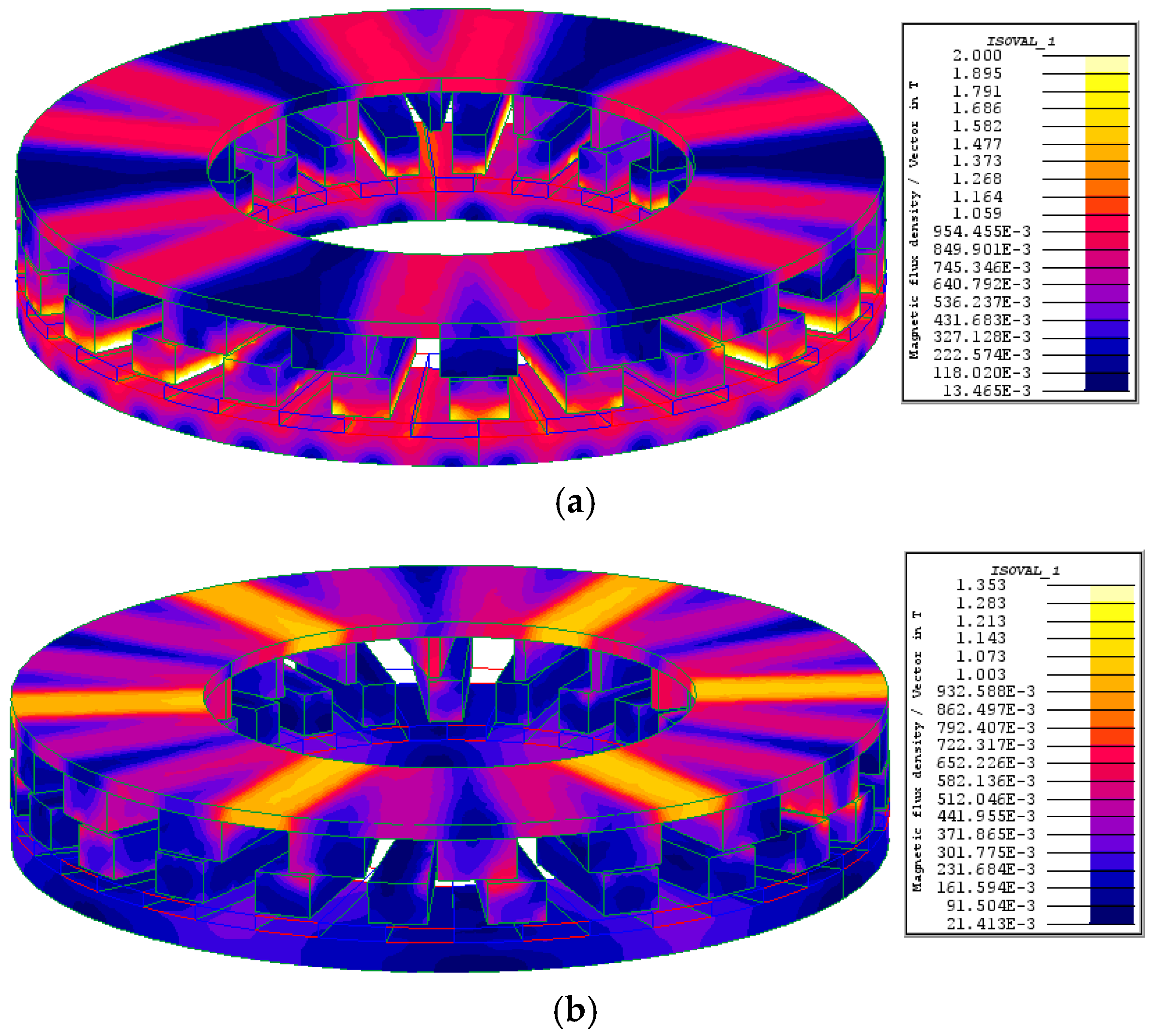
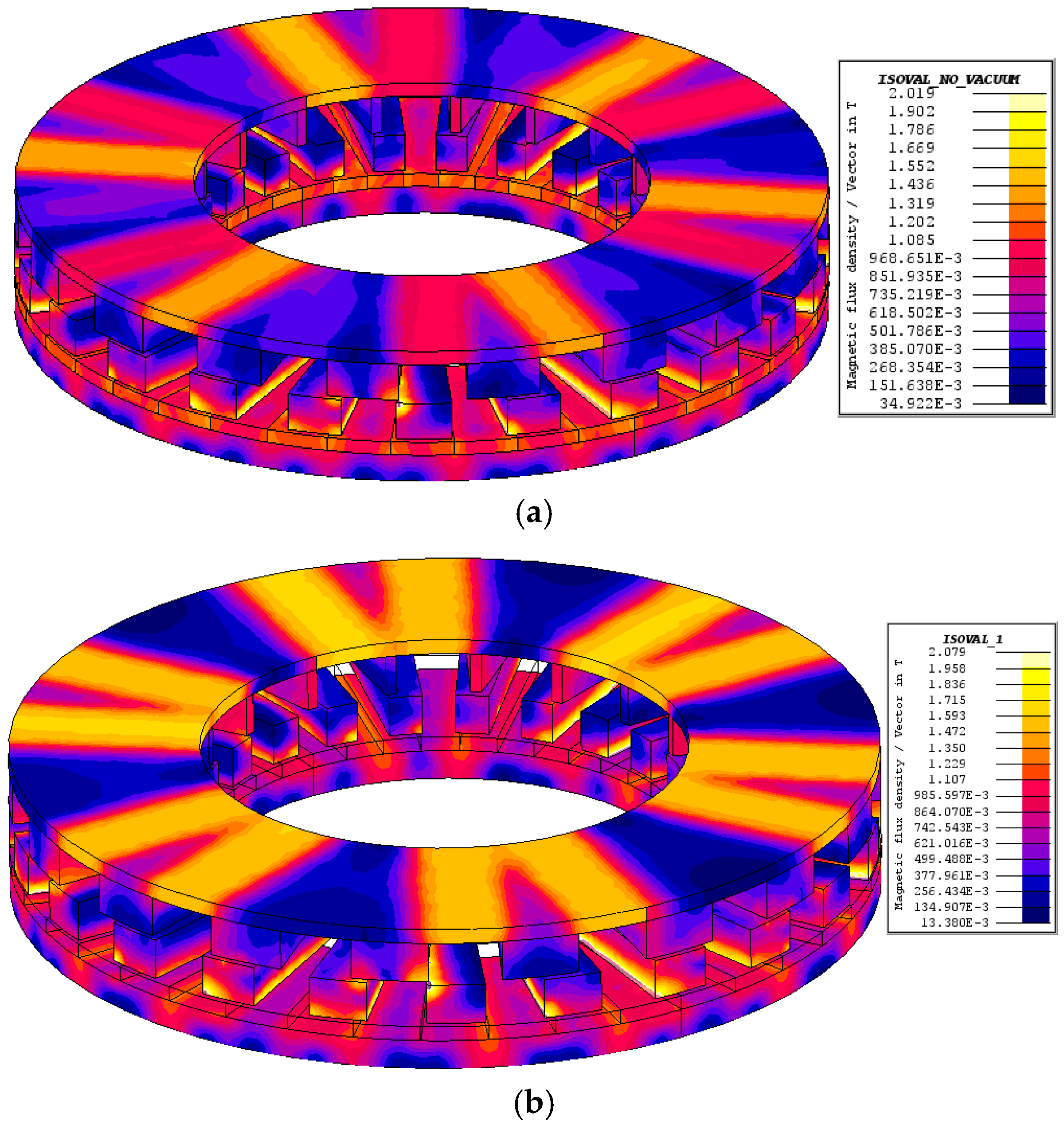
4.3. Saturation Effect
4.4. End Effect
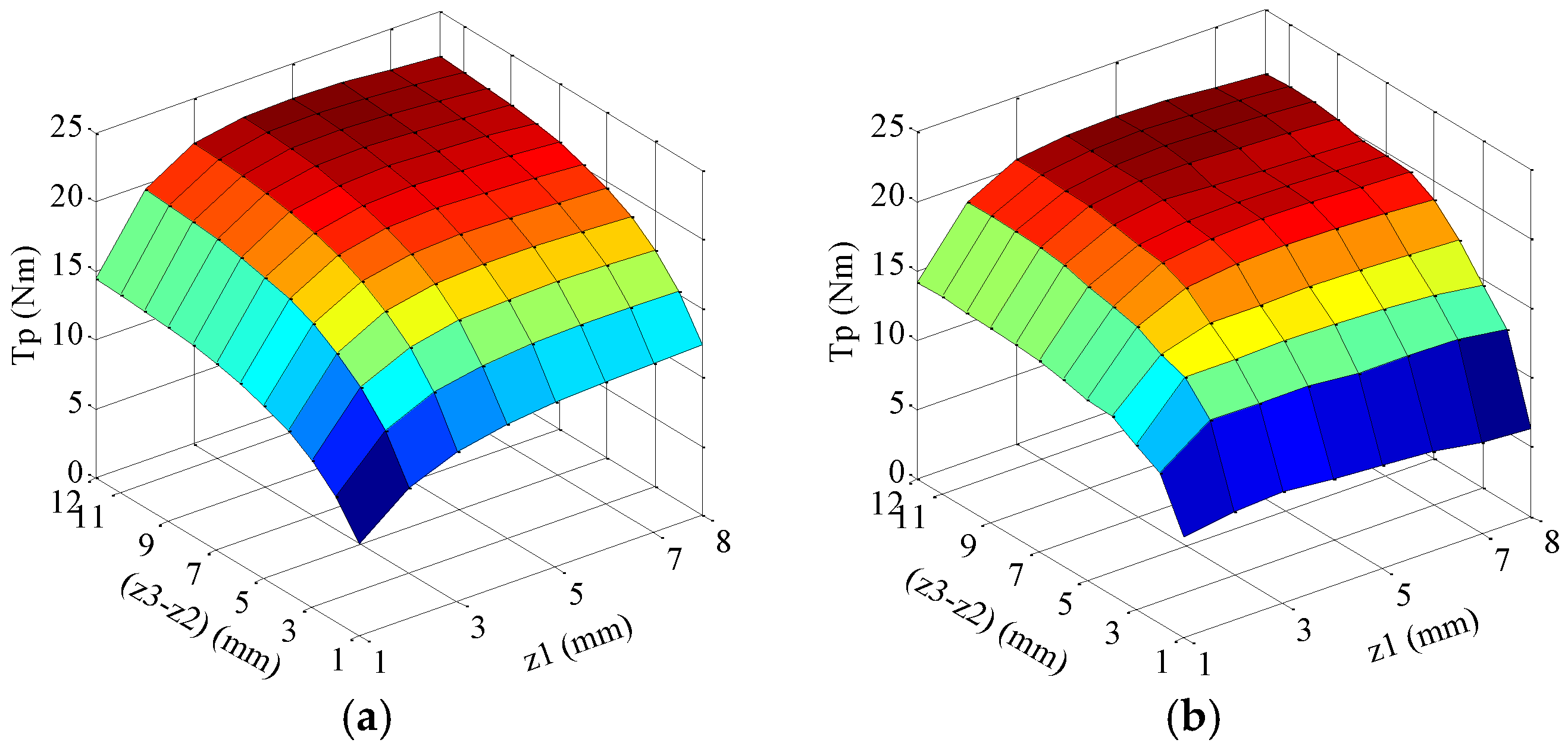
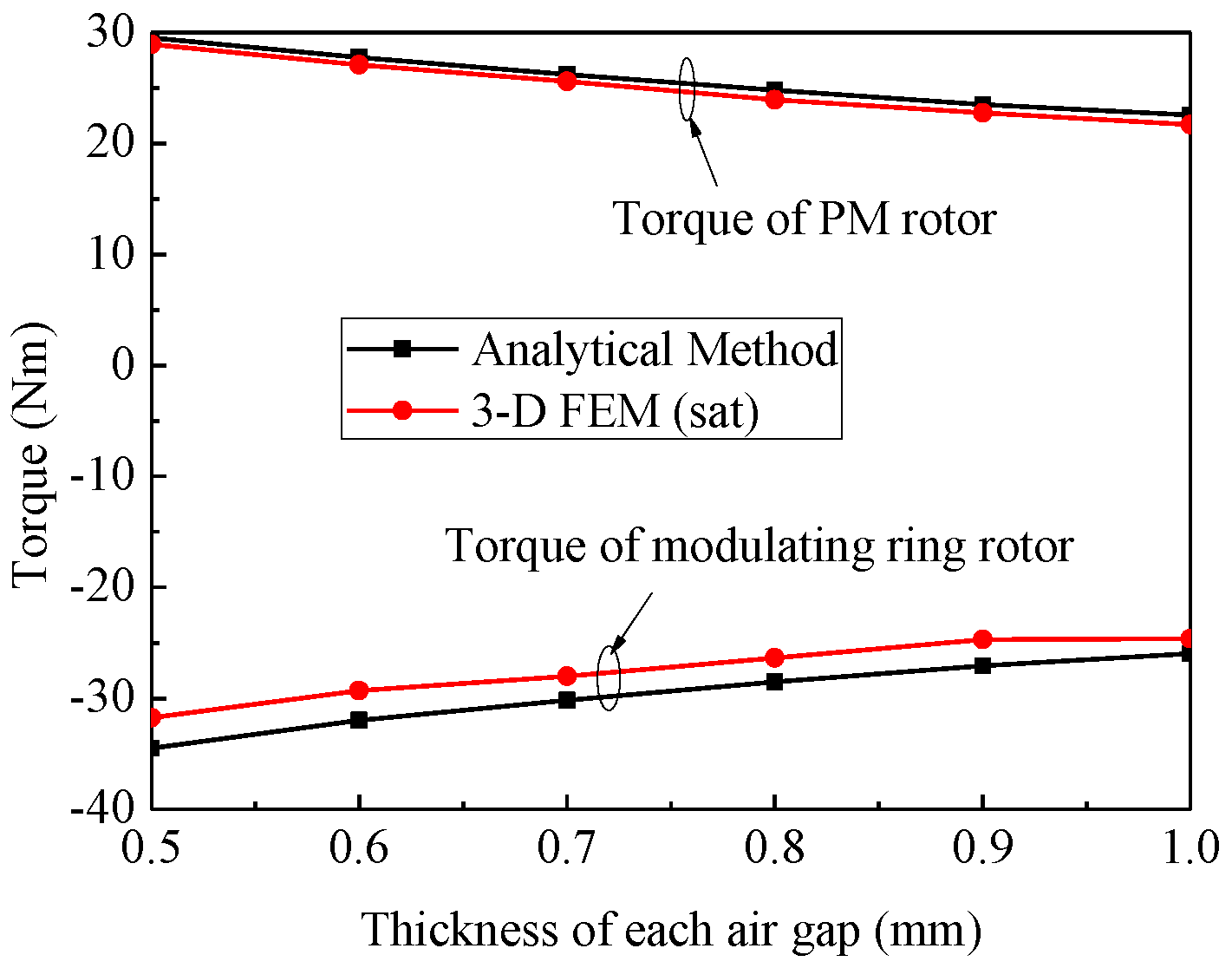
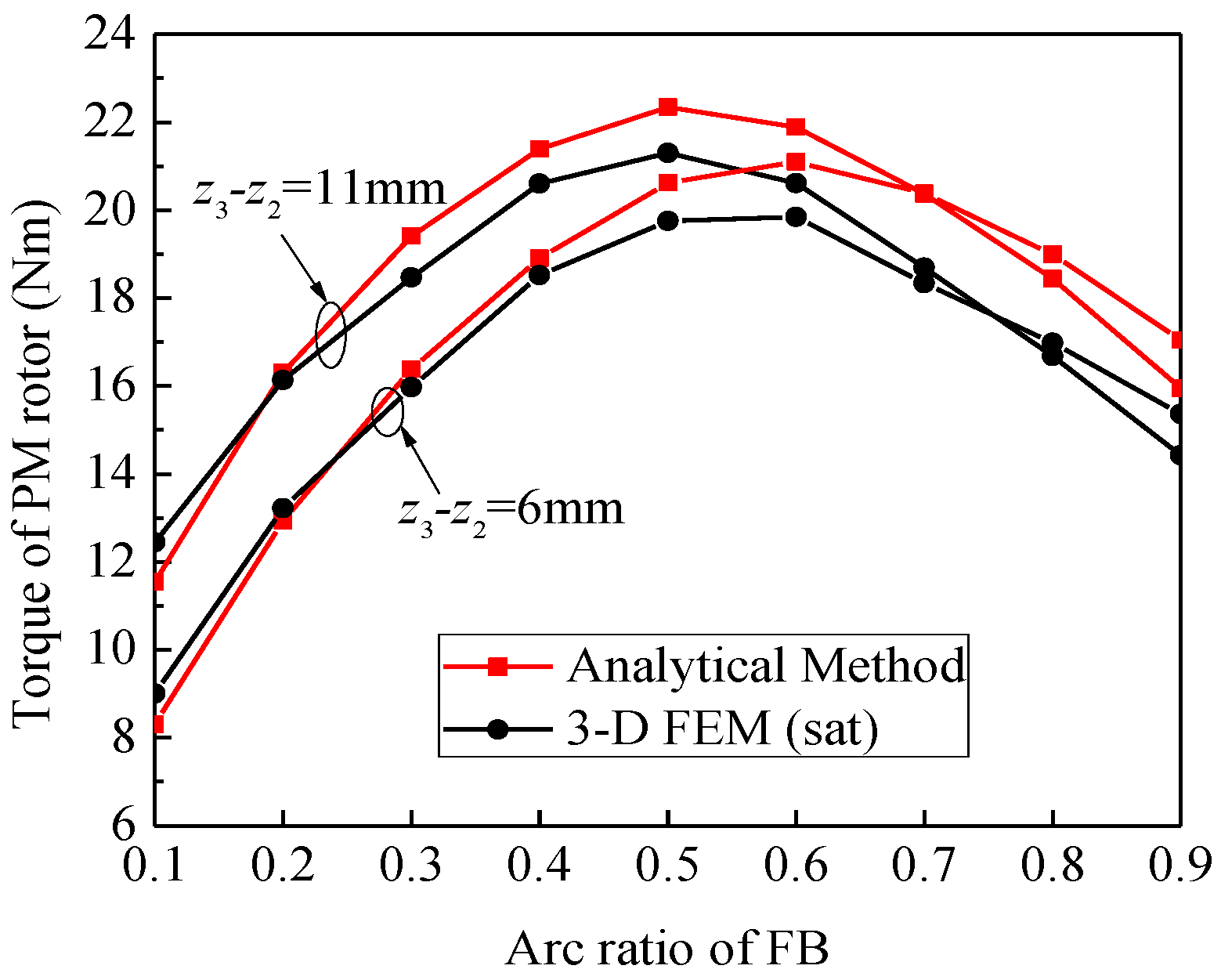
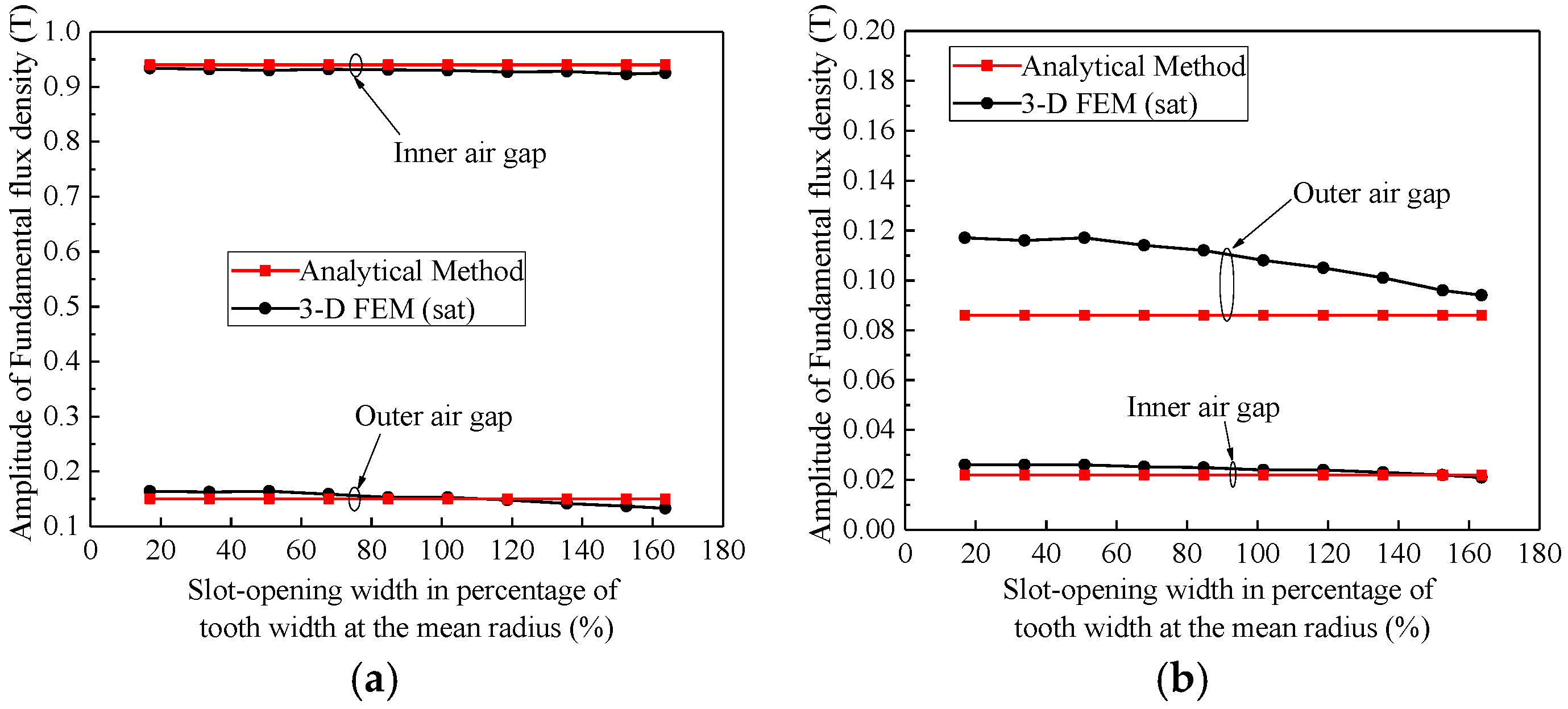
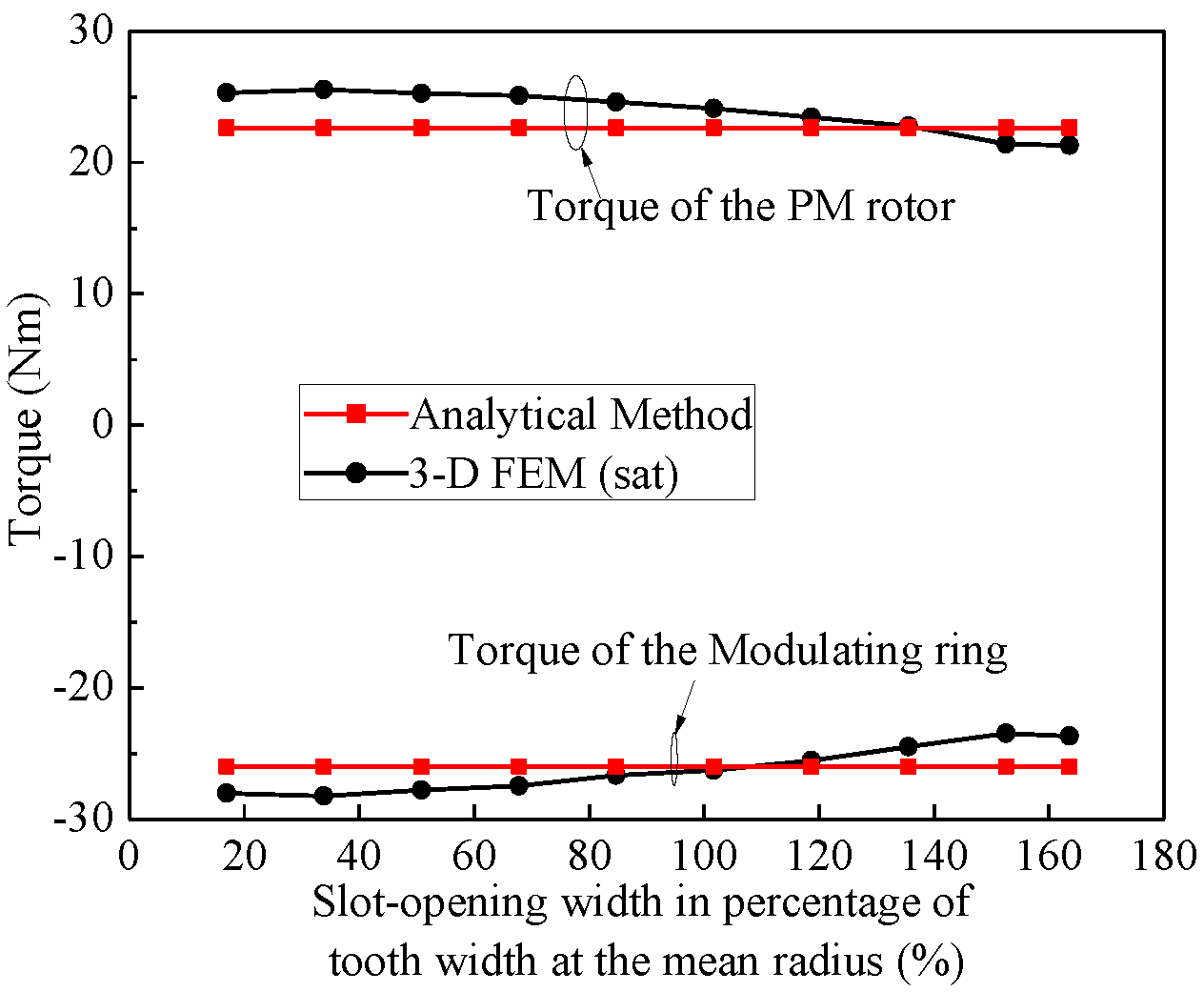
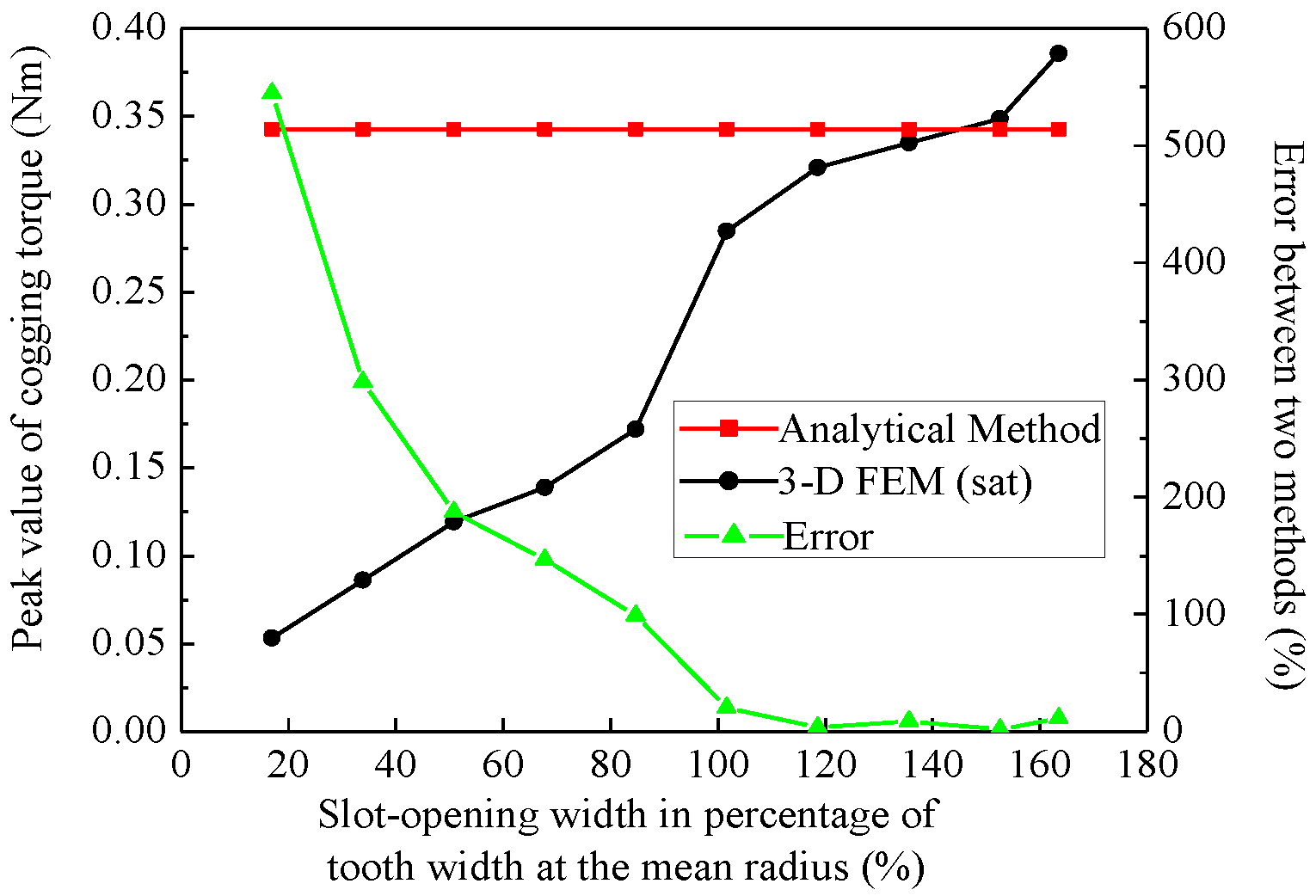
4.5. Influence of Key Parameters on the Performance
4.6. Application Scope
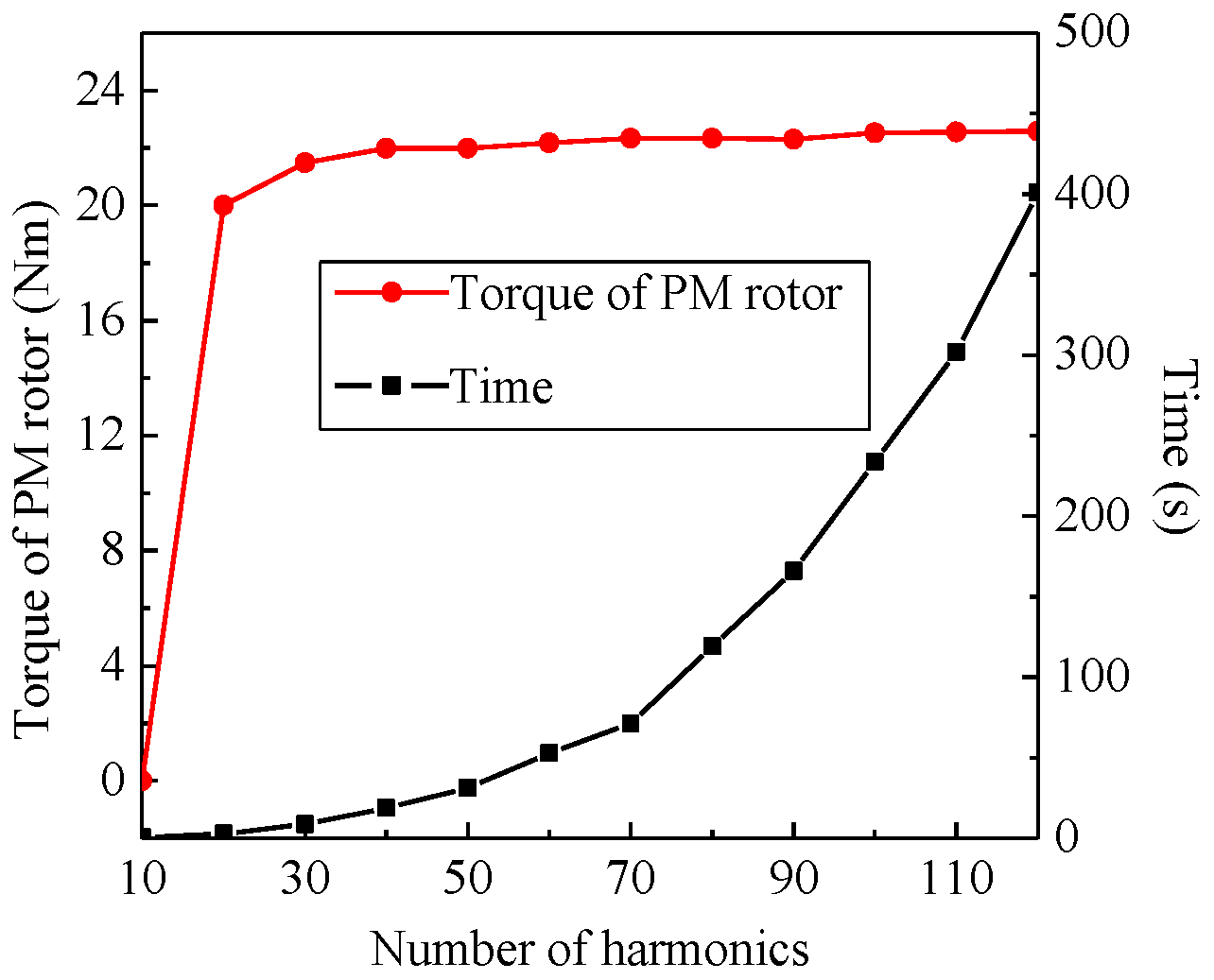
4.7. Computing Time Evaluation
5. Conclusions
- (1)
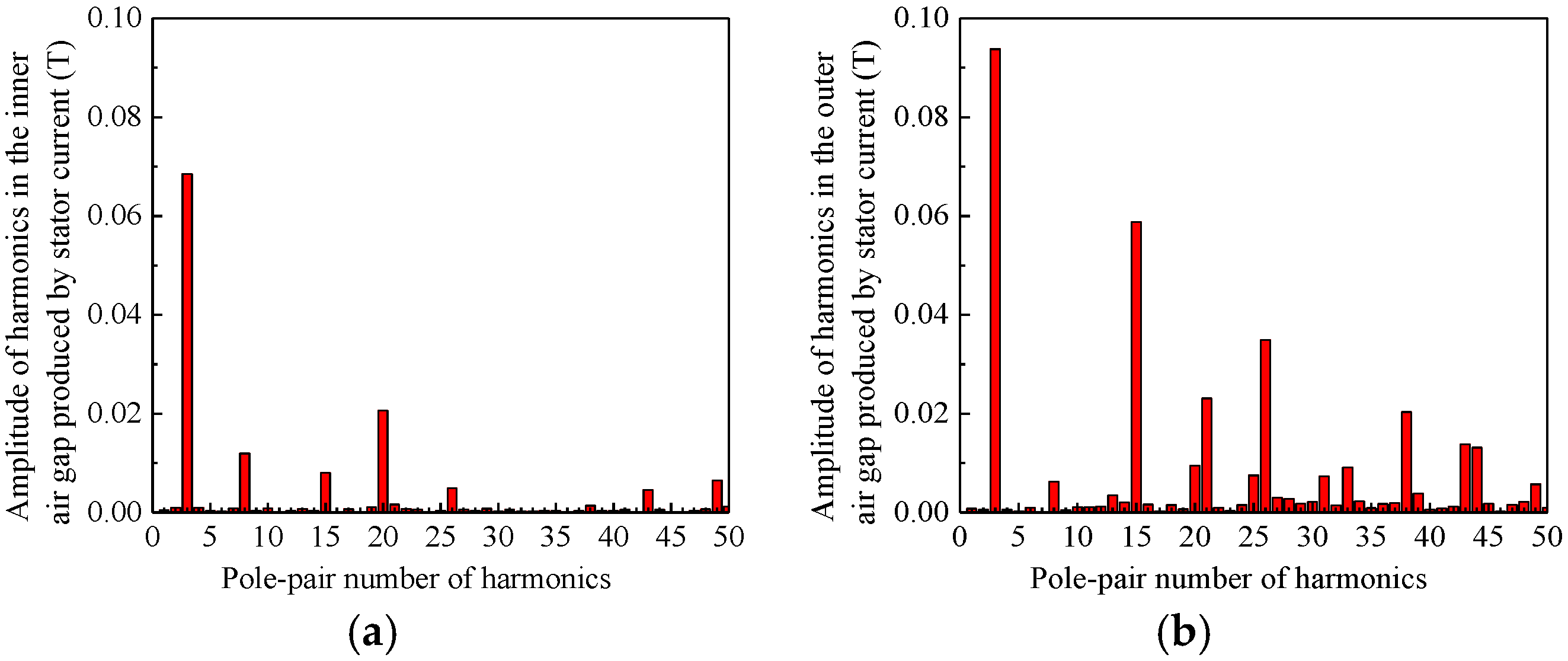
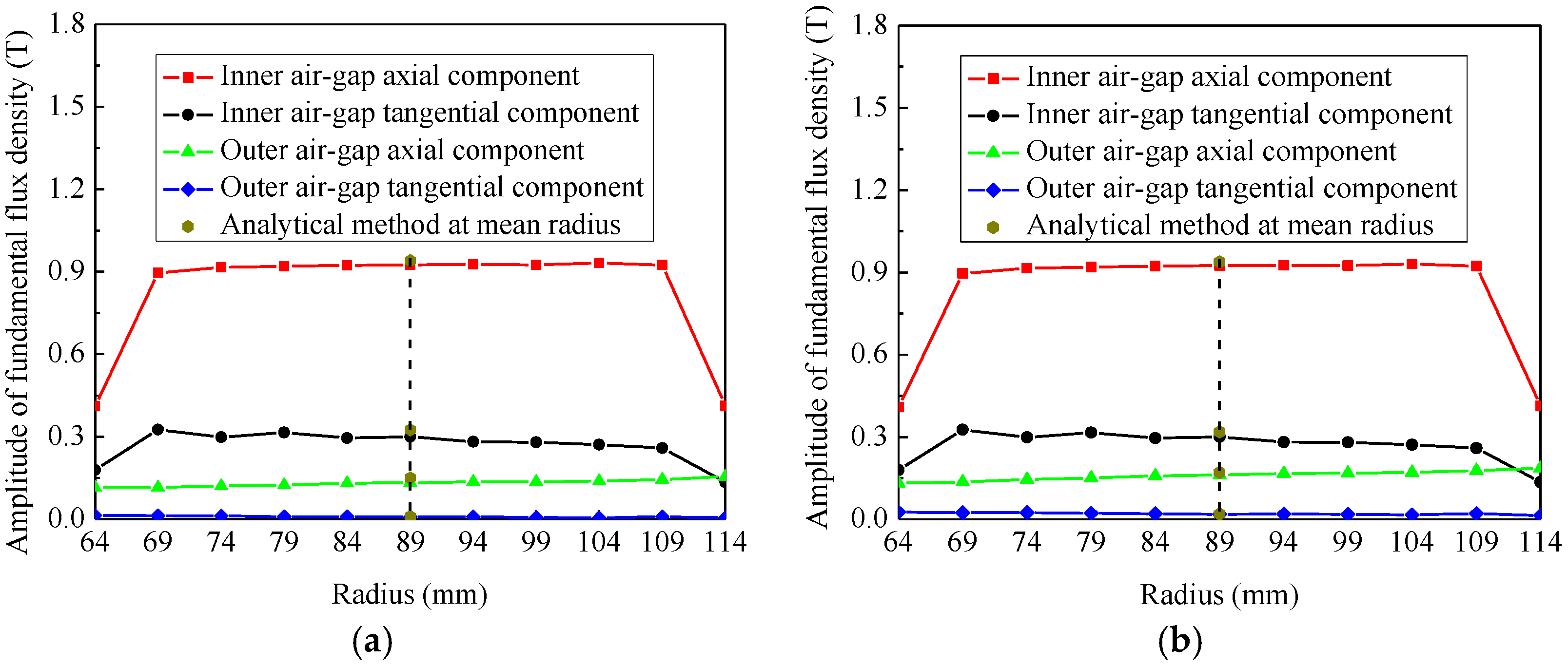
- The analytical expressions for open-circuit and armature reaction field distribution by considering the stator slotting and modulation effect have been derived from a set of Laplace’s or Poisson’s equations with corresponding boundary conditions. The magnetic-field predictions show good consistency with 3-D FEM results.
- (2)
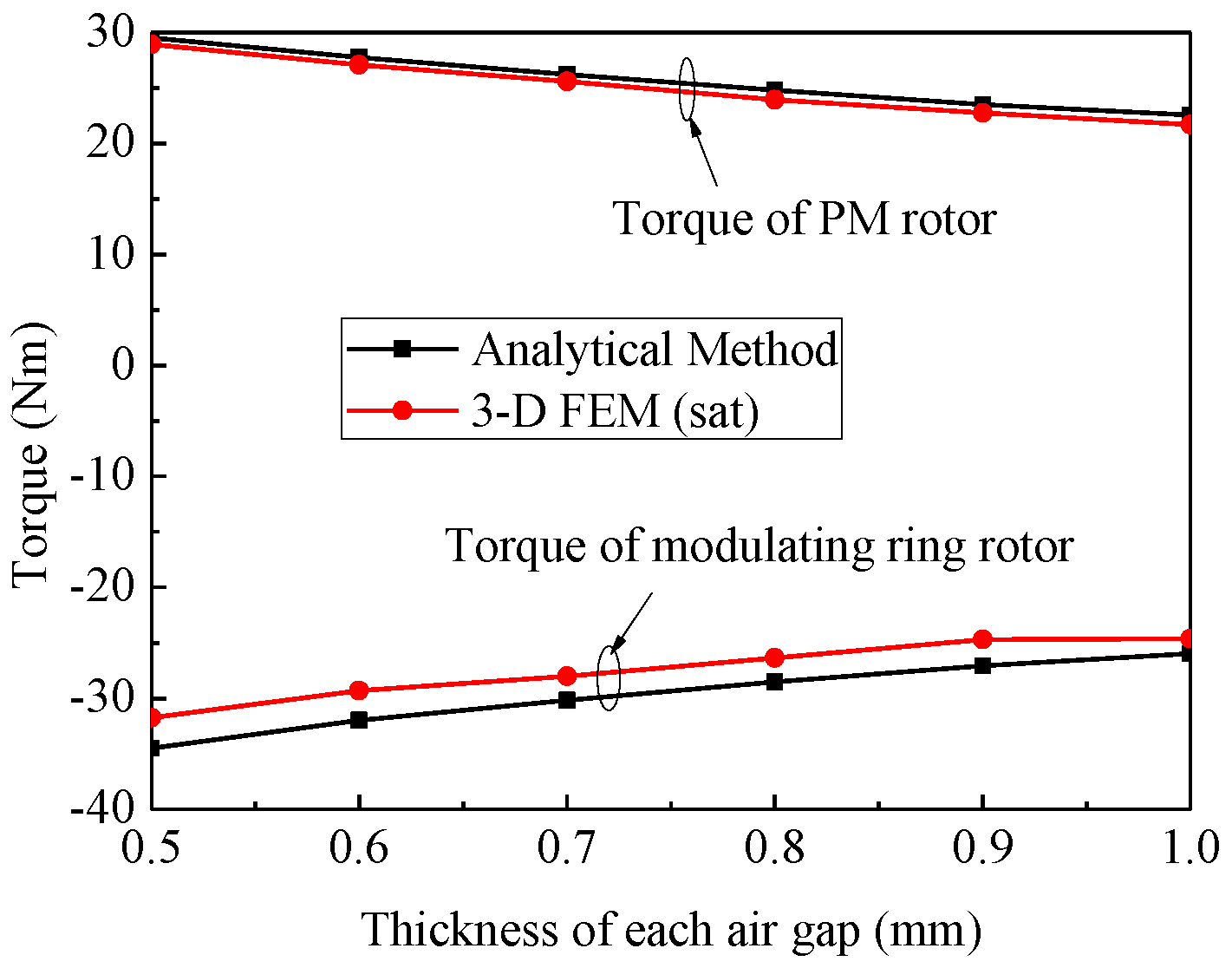
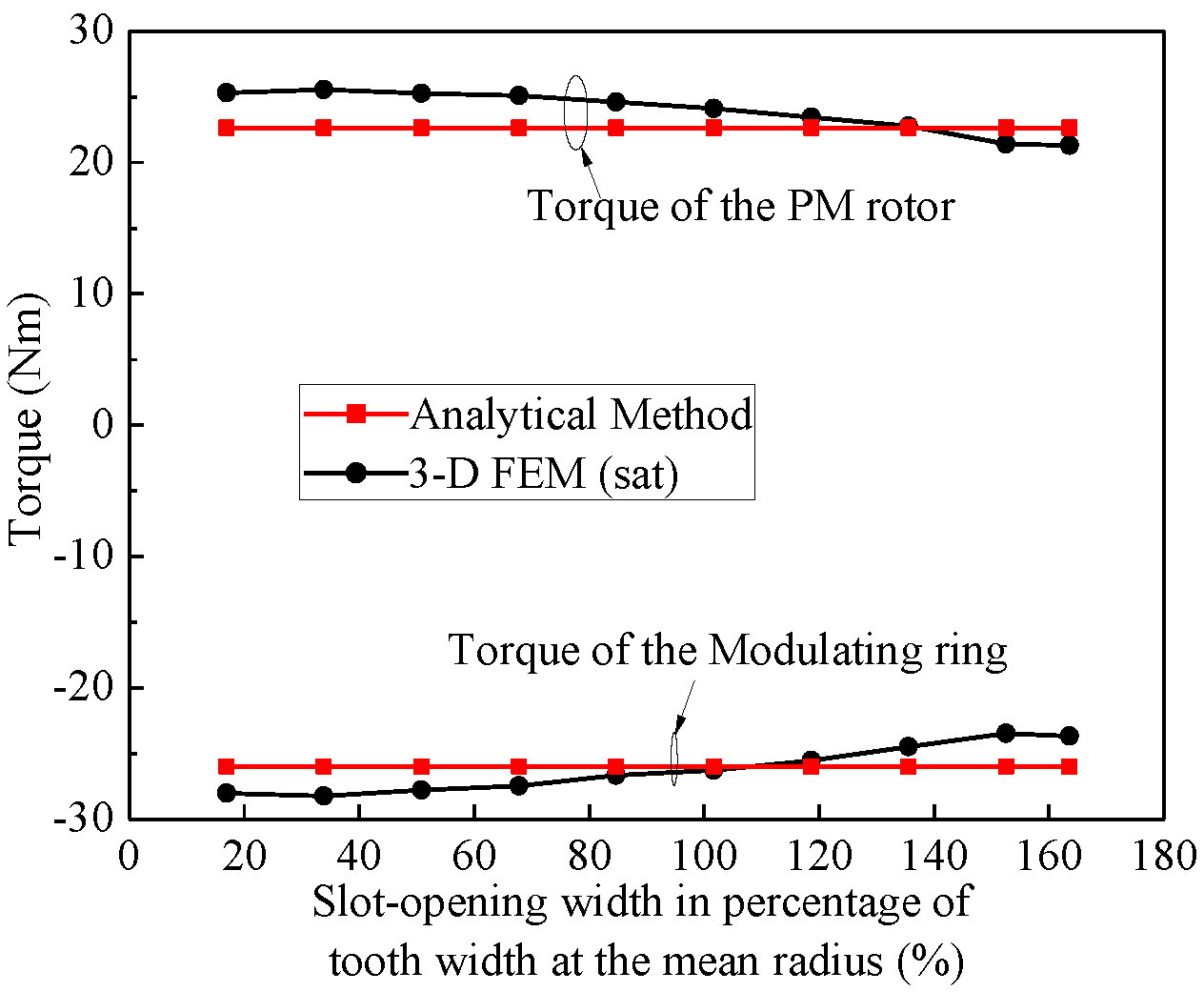
- The no-load back EMF, torque and axial force have been obtained by adopting the predicted flux density at the mean radius instead of the actual 3-D distribution of the magnetic field. The 2-D analytical method overestimates the machine performance by less than 11%. The discrepancy is mainly due to the fact that the analytical method assumes unsaturation of the soft-magnetic material and no end effect.
- (3)
- As the analytical and 3-D FEM computation follow the same trend in evaluating the torque with less calculation time and more flexibility, it can be used as an effective tool for the initial design procedure of the axial MFM-BDRM with open slot.
- (4)
- Though the proposed method could not capture the fluctuation in torque with the change of slot-opening width, it can be used for performance prediction of the open-slot or the semi-closed-slot machine with high precision.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
References
- Nordlund, E.; Eriksson, S. Test and verification of a four-quadrant transducer for HEV applications. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 7–9 September 2005.
- Hoeijmakers, M.J.; Ferreira, J.A. The electric variable transmission. IEEE Trans. Ind. Appl. 2006, 42, 1092–1100. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, Y.; Wen, X. Multioperational modes and control strategies of dual-mechanical-port machine for hybrid electrical vehicles. IEEE Trans. Ind. Appl. 2009, 45, 747–755. [Google Scholar] [CrossRef]
- Shumei, C.; Yongjie, Y.; Tiecheng, W. Research on switched reluctance double-rotor motor used for hybrid electric vehicle. In Proccedings of the International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 3393–3396.
- Zheng, P.; Liu, R.; Thelin, P.; Nordlund, E.; Sadarangani, C. Research on the cooling system of a 4QT prototype machine used for HEV. IEEE Trans. Energy Convers. 2008, 23, 61–67. [Google Scholar] [CrossRef]
- Sun, X.; Cheng, M. Thermal analysis and cooling system design of dual mechanical port machine for wind power application. IEEE Trans. Ind. Electron. 2013, 60, 1724–1733. [Google Scholar] [CrossRef]
- Bai, J.; Liu, Y.; Sui, Y.; Tong, C.; Zhao, Q.; Zhang, J. Investigation of the cooling and thermal-measuring system of a compound-structure permanent-magnet synchronous machine. Energies 2014, 7, 1393–1426. [Google Scholar] [CrossRef]
- Cavagnino, A.; Lazzari, M.; Profumo, F.; Tenconi, A. A comparison between the axial flux and the radial flux structures for PM synchronous motors. IEEE Trans. Ind. Appl. 2002, 38, 1517–1524. [Google Scholar] [CrossRef]
- Huang, S.; Aydin, M.; Lipo, T.A. A direct approach to electrical machine performance evaluation: Torque density assessment and sizing optimization. In Proceedings of the 2002 Xth International Conference on Electrical Machines (ICEM), Bruges, Belgium, 26–28 August 2002.
- Mezani, S.; Atallah, K.; Howe, D. A high-performance axial-field magnetic gear. J. Appl. Phys. 2006, 99. [Google Scholar] [CrossRef]
- Niguchi, N.; Hirata, K.; Zaini, A.; Nagai, S. Proposal of an axial-type magnetic-geared motor. In Proceedings of the 2012 XXth International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 738–743.
- Ho, S.L.; Niu, S.; Fu, W.N. Design and analysis of a novel axial-flux electric machine. IEEE Trans. Magn. 2011, 47, 4368–4371. [Google Scholar] [CrossRef]
- Johnson, M.; Gardner, M.C.; Toliyat, H.A. Design and analysis of an axial flux magnetically geared generator. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 6511–6518.
- Wang, R.J.; Brönn, L.; Gerber, S.; Tlali, P.M. Design and evaluation of a disc-type magnetically geared PM wind generator. In Proceedings of the 2013 Fourth International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), Istanbul, Turkey, 13–17 May 2013; pp. 1259–1264.
- Rojas, A.; Tapia, J.A.; Valenzuela, M.A. Axial flux PM machine design with optimum magnet shape for constant power region capability. In Proceedings of the 18th International Conference on Electrical Machines, ICEM 2008, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6.
- Zheng, P.; Song, Z.; Bai, J.; Tong, C.; Yu, B. Research on an axial magnetic-field-modulated brushless double rotor machine. Energies 2013, 6, 4799–4829. [Google Scholar] [CrossRef]
- Dubas, F.; Espanet, C. Analytical solution of the magnetic field in permanent-magnet motors taking into account slotting effect: No-load vector potential and flux density calculation. IEEE Trans. Magn. 2009, 45, 2097–2109. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. 2-D exact analytical model for surface-mounted permanent-magnet motors with semi-closed slots. IEEE Trans. Magn. 2011, 47, 479–492. [Google Scholar] [CrossRef]
- Rahideh, A.; Korakianitis, T. Analytical magnetic field calculation of slotted brushless permanent-magnet machines with surface inset magnets. IEEE Trans. Magn. 2012, 48, 2633–2649. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Instantaneous magnetic field distribution in brushless permanent magnet DC motors, Part III: Effect of stator slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Analytical computation of the magnetic field distribution in a magnetic gear. IEEE Trans. Magn. 2010, 46, 2611–2621. [Google Scholar] [CrossRef]
- Jian, L.; Xu, G.; Mi, C.C.; Chau, K.T.; Chan, C.C. Analytical method for magnetic field calculation in a low-speed permanent-magnet harmonic machine. IEEE Trans. Energy Convers. 2011, 26, 862–870. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.J.; Jing, L.B. Exact analytical method for magnetic field computation in the concentric magnetic gear with Halbach permanent-magnet arrays. In Proceedings of the 2013 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices, Beijing, China, 25–27 October 2013.
- Lubin, T.; Mezani, S.; Rezzoug, A. Development of a 2-D analytical model for the electromagnetic computation of axial-field magnetic gears. IEEE Trans. Magn. 2013, 49, 5507–5521. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
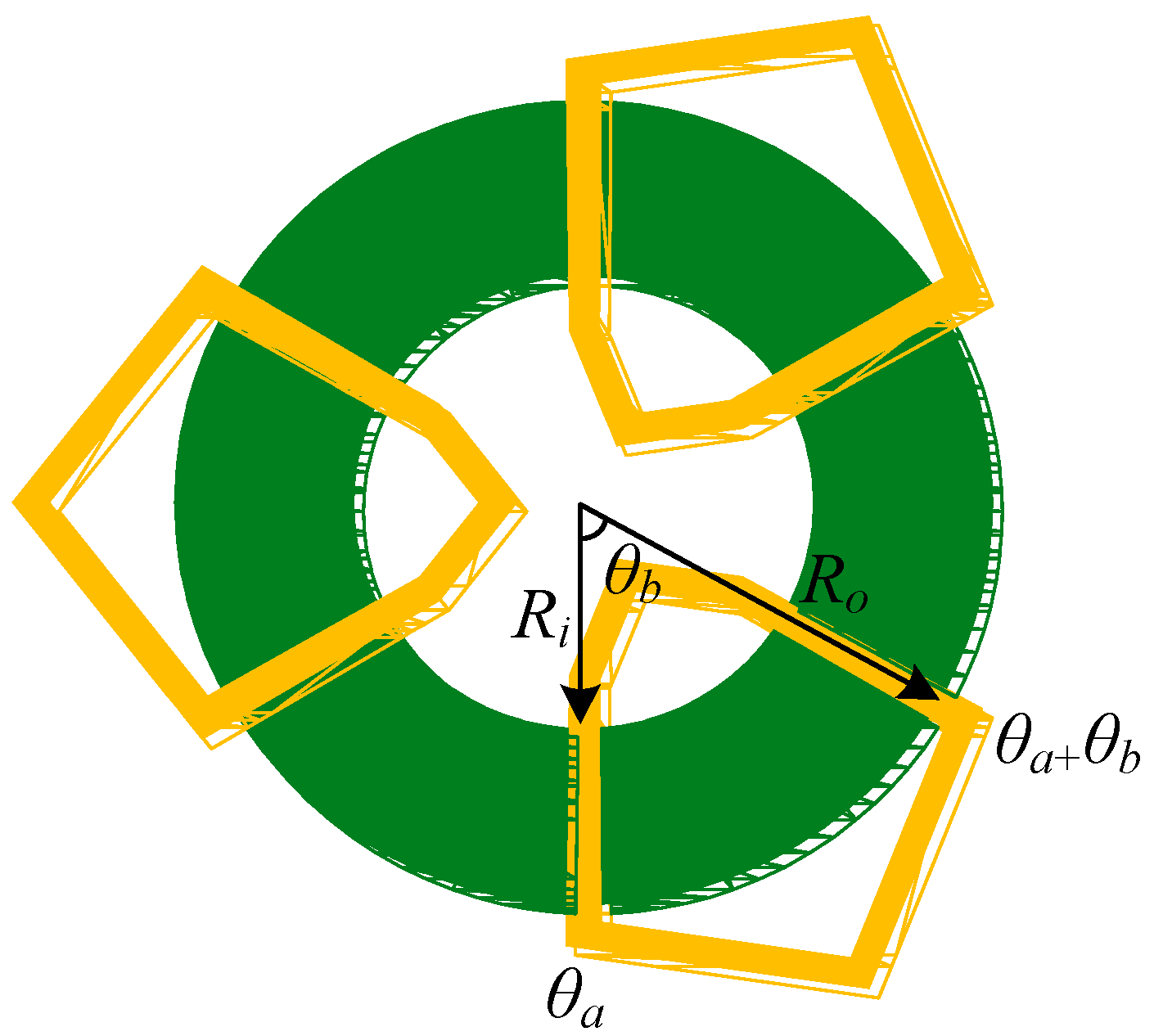
| Ri | inner radius | 64 mm |
| Ro | outer radius | 114 mm |
| z1 | PM thickness | 4 mm |
| z2 − z1 | inner air-gap thickness | 1 mm |
| z3 − z2 | FB thickness | 11 mm |
| z4 − z3 | outer air-gap thickness | 1 mm |
| Q | pole number of FB | 23 |
| pp | pole-pair number of PM rotor | 20 |
| ps | pole-pair number of stator | 3 |
| S | slot number | 18 |
| hs | height of slot | 11 mm |
| ws | width of slot | 19.3 mm |
| αp | pole-arc coefficient of PM rotor | 1 |
| αf | arc ratio of FB | 0.5 |
| Nt | number of conductors per slot | 13 |
| wt | width of tooth at the mean radius | 11.8 mm |
| Br | Remanent flux density of PM | 1.26 T |
| I | Root mean square value of one-phase current | 30 A |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, C.; Song, Z.; Bai, J.; Liu, J.; Zheng, P. Analytical Investigation of the Magnetic-Field Distribution in an Axial Magnetic-Field-Modulated Brushless Double-Rotor Machine. Energies 2016, 9, 589. https://doi.org/10.3390/en9080589
Tong C, Song Z, Bai J, Liu J, Zheng P. Analytical Investigation of the Magnetic-Field Distribution in an Axial Magnetic-Field-Modulated Brushless Double-Rotor Machine. Energies. 2016; 9(8):589. https://doi.org/10.3390/en9080589
Chicago/Turabian StyleTong, Chengde, Zhiyi Song, Jingang Bai, Jiaqi Liu, and Ping Zheng. 2016. "Analytical Investigation of the Magnetic-Field Distribution in an Axial Magnetic-Field-Modulated Brushless Double-Rotor Machine" Energies 9, no. 8: 589. https://doi.org/10.3390/en9080589