1. Introduction
Since fossil fuel energy resources are becoming scarcer and the environment is negatively affected by their combustion, increasing attention is being paid to electric vehicles (EVs) [
1]. Hydrogen fuel cell electric vehicles (FCEVs) are one type of electric vehicle. Polymer electrolyte membrane (PEM) FCEVs have the advantages of high efficiency, low temperature and low noise. In addition, FCEVs provide zero emission driving combined with reasonably short refueling times of 3 to 5 min. If the hydrogen used for FCEVs is produced with renewable electricity such as solar and wind power generation, there is an environmental advantage of a FCEV towards an internal combustion engine (ICE) vehicle [
2,
3]. In addition, compared with battery systems, PEM fuel cell systems can store more energy because of the high energy density of hydrogen gas, so the driving range of a (PEM) FCEV can be as extended as that of an ICE vehicle [
4,
5]. Therefore, a PEM fuel cell is suitable for vehicles with large weight and long driving range requirement, such as buses.
Owing to the effect of gas inertia, the actual power change of the fuel cell is always delayed by several seconds compared with power demand; otherwise, there would be a serious gas starvation, which is harmful to the fuel cell stack. Thus, in order to satisfy the power demand, the fuel cell system is usually combined with an energy storage system such as a battery package or ultra-capacitor system, constituting a hybrid fuel cell powertrain [
6,
7]. For this reason, most buses adopt hybrid powertrains to obtain an improved performance and extended life of the fuel cell system [
8,
9,
10].
In particular, fuel cell buses are receiving more and more attention worldwide. All major international automobile manufacturers have launched fuel cell buses, and in order to promote the commercialization of these buses, they have been demonstrated in transit service in various countries [
9].
For example, nine demonstrational projects of fuel cell buses were carried out in the US during the years 2010–2012. These projects were carried out in different cities. By the end of December 2011, three different buses achieved running times of 1100 h, 8000 h and 6000 h, respectively [
11,
12].
Under the European Union project entitled Clean Urban Transport for Europe (CUTE), 36 Citaro fuel cell buses together achieved an accumulated driving time of more than 140,000 hours, and an accumulated driving distance of over 2,200,000 km [
13].
The second phase of the Japan Hydrogen and Fuel Cell (JHFC) project was completed in 2010 [
14]. During the past eight years, 13 fuel cell buses accumulated a remarkable driving distance of 400,000 km [
15].
As the technology advances, hybrid systems with smaller fuel cells and more powerful batteries are being developed that will further increase the reliability and cost-effectiveness of the systems [
16,
17]. The third generation prototype of the hybrid fuel cell powertrain system developed by Tsinghua University is called a “plug-in hybrid fuel cell powertrain” and comprises a battery that allows charging from the grid. The fuel cell system provides the average power demand and works in a relatively stable state to prolong its working lifetime. The more powerful lithium-ion battery provides the extra power to ensure dynamic performance [
10].
A hybrid powertrain requires the coordinated functioning of different systems, so a hierarchical control strategy is required. The strategy structure needs to consist of both vehicle control and fuel cell control. A number of studies have been conducted to develop an optimized hierarchical control strategy.
For vehicle control, many researches are about energy management strategies. Paganelli
et al. laid the foundation for an optimized energy management strategy by introducing the concept of equivalent fuel consumption [
18]. Peng Hui
et al. introduced global optimization algorithms using dynamic programming or stochastic programming methods for hybrid vehicles, enabling a reduction in fuel consumption of up to 15% [
19]. Junzhi Zhang developed a braking energy regeneration control strategy coordinating the regenerative brake and the pneumatic brake for a fuel cell hybrid bus, the results showed that the fuel consumption was improved by 11.5% and the brake safety was guaranteed at the same time [
20]. Xu
et al. proposed an adaptive supervisory control strategy for a fuel cell/batter y-powered city bus to fulfill the complex road conditions in Beijing bus routes, what lowered fuel consumption from 9.5 kg (100 km)
−1 to 9.3 kg (100 km)
−1 [
21]. In addition, they set up a simulation model to compare the DDP (Determined Dynamic Programming) strategy, the DBSD (Charge Depleting-Blended-Sustaining-Depleting) strategy and the CDCS (Charge Depleting and Charge Sustaining) strategies. Compared to the CDCS strategy, the daily operating cost can be reduced by 6.4% with the DBSD strategy, and it can be reduced by 9.5% with the DDP strategy [
22]. Besides energy management strategies, Xu
et al. have also done some other work on vehicle control such as developed an optimal control strategy based on a time-triggered controller area network (TTCAN) and developed an active fault tolerance control system to ensure the vehicle safety [
23,
24].
For fuel cell control, J.T. Pukrushpan
et al. proposed a widely-used non-linear dynamic model to describe the PEM fuel cell system, and designed feedback controllers based on the model [
25]. Rakhtala
et al. presented the designing and controlling a suitable power conditioning unit (PCU) that consists of two DC/DC converter stages and DC/AC inverter. In addition, an analysis of cascade structure based on fuzzy PID controller for a single phase inverter is done and also two feedback control loops are comprised [
26]. Fang developed a model based control strategy to regulate the anode pressure of the fuel cell system and utilized the strategy on a test bench [
27]. Toyota has done excellent work on fuel cell cold start control. They use the concept of concentration loss and developed a control strategy which enable the system to start up from −37 degree centigrade. In addition, the problem of pumping hydrogen is solved by a bypass valve control [
28,
29].
However, there are not many researches about how to improve the fuel cell durability and system reliability through vehicle control. In addition, the DC/DC efficiency has not been widely investigated.
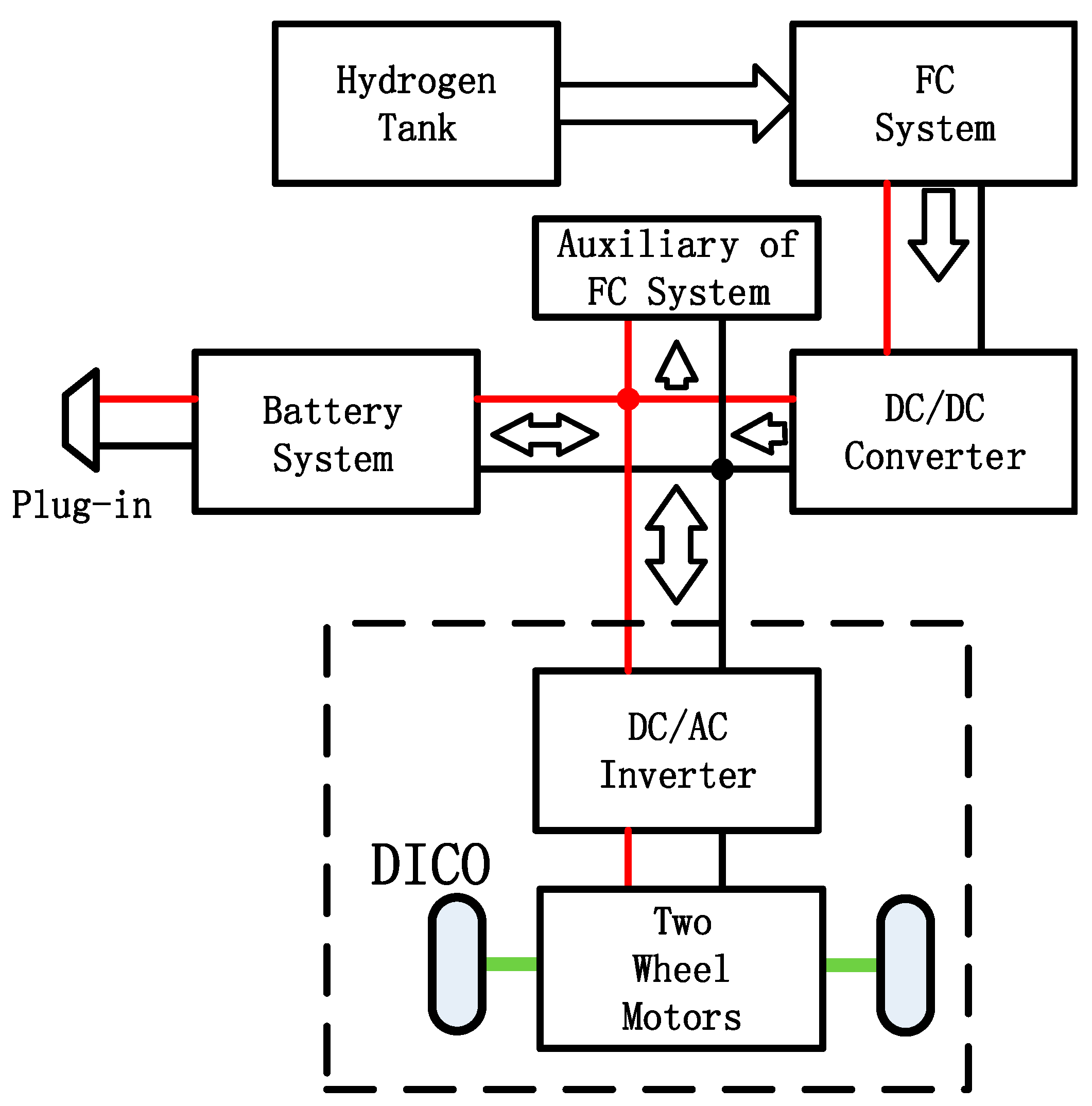
In this paper, a plug-in hybrid fuel cell bus with a small fuel cell system and a high-power battery package was studied. The rest of this paper is organized as follows: first, the powertrain structure and the fuel cell system are introduced, together with the hierarchical control system. Then, in
Section 3, the control strategies aiming at improving durability, reliability and efficiency are discussed, including start-stop strategy, energy management strategy, air supply control strategy, hydrogen supply control strategy. In
Section 4, the start performance, dynamic performance and economy performance of the bus are analyzed based on road test data.
Section 5 presents the conclusions of our study.
4. Performance Analysis and Discussion
Road testing of a city bus was undertaken to test the effectiveness of the control strategies highlighted in
Section 3. In this section, the performance of the city bus is analyzed.
4.1. Start-up Process
The purpose of testing the start-up process was to make sure that every component started in the correct order and functioned in a safe condition. The following procedures describe the start-up order. First, the driver shifted the key to ACC, which meant the power supply for the control system was on. When the VCU received the ACC signal from the driver, it communicated with the battery and DICO to make sure they were ready to connect, and also sent commands to various related relays so that they were connected to the power network bus when ready. After proceeding to this step, the vehicle could move when the key was shifted to START and the transmission was shifted to the correct position.
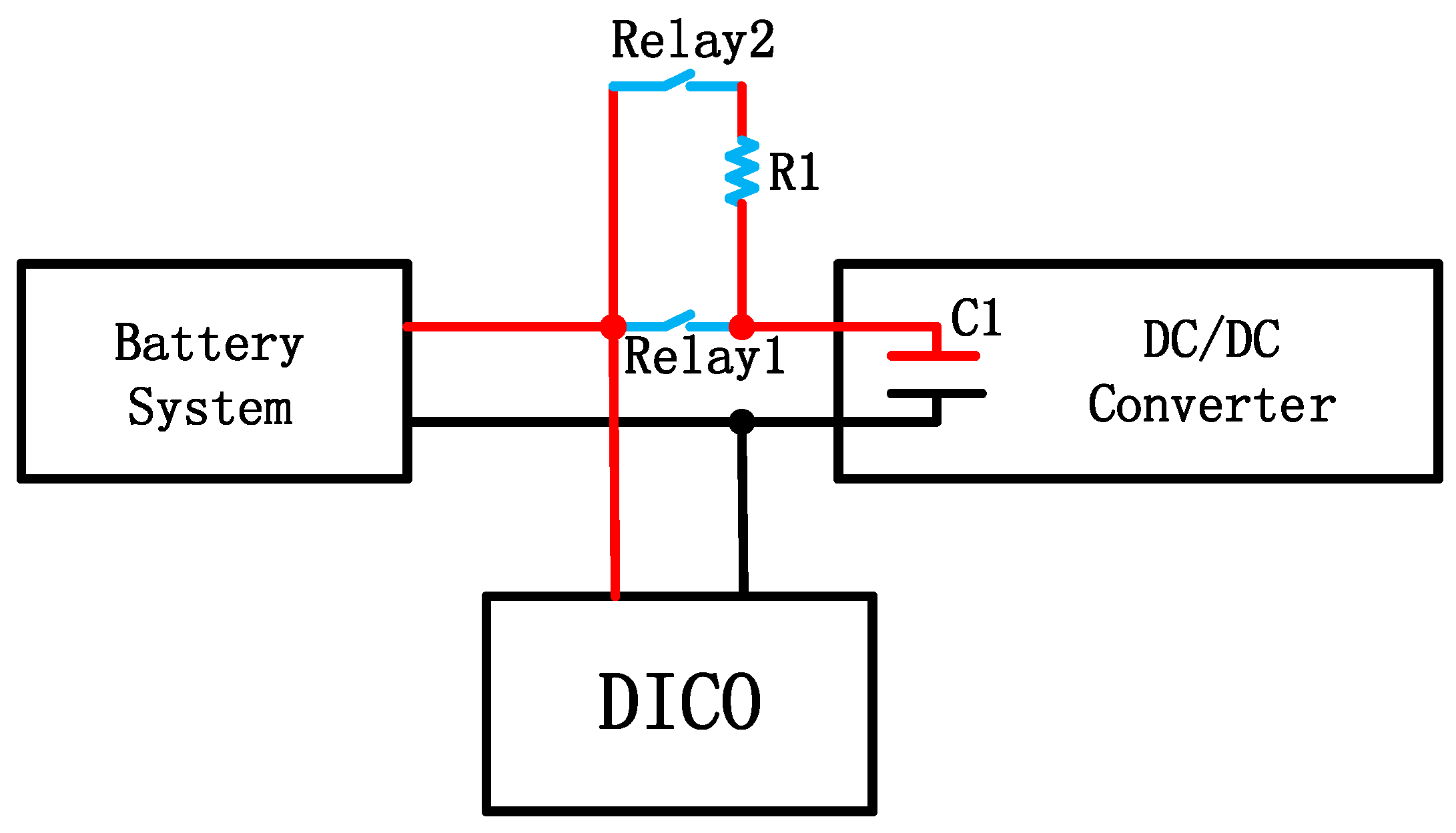
After the key was shifted to START and the battery and DICO were connected, the VCU started to control the DC/DC converter. First, the control code changed, which meant the DC/DC started to function in current mode. Then, Relay 2 was closed to charge the capacitor C1. As soon as the voltage of C1 reached the voltage of the power network bus, Relay 1 was closed and Relay 2 was turned off. When all these procedures were complete, the VCU sent commands to the DC/DC controller to operate the DC/DC converter as required.
If the VCU had already sent control commands to the DC/DC controller and the driver had pressed the FC-On and H2-Active buttons to start the fuel cell and open the hydrogen valve at the same time, then the relay between the DC/DC and the fuel cell system closed so that the fuel cell could start transmitting power.
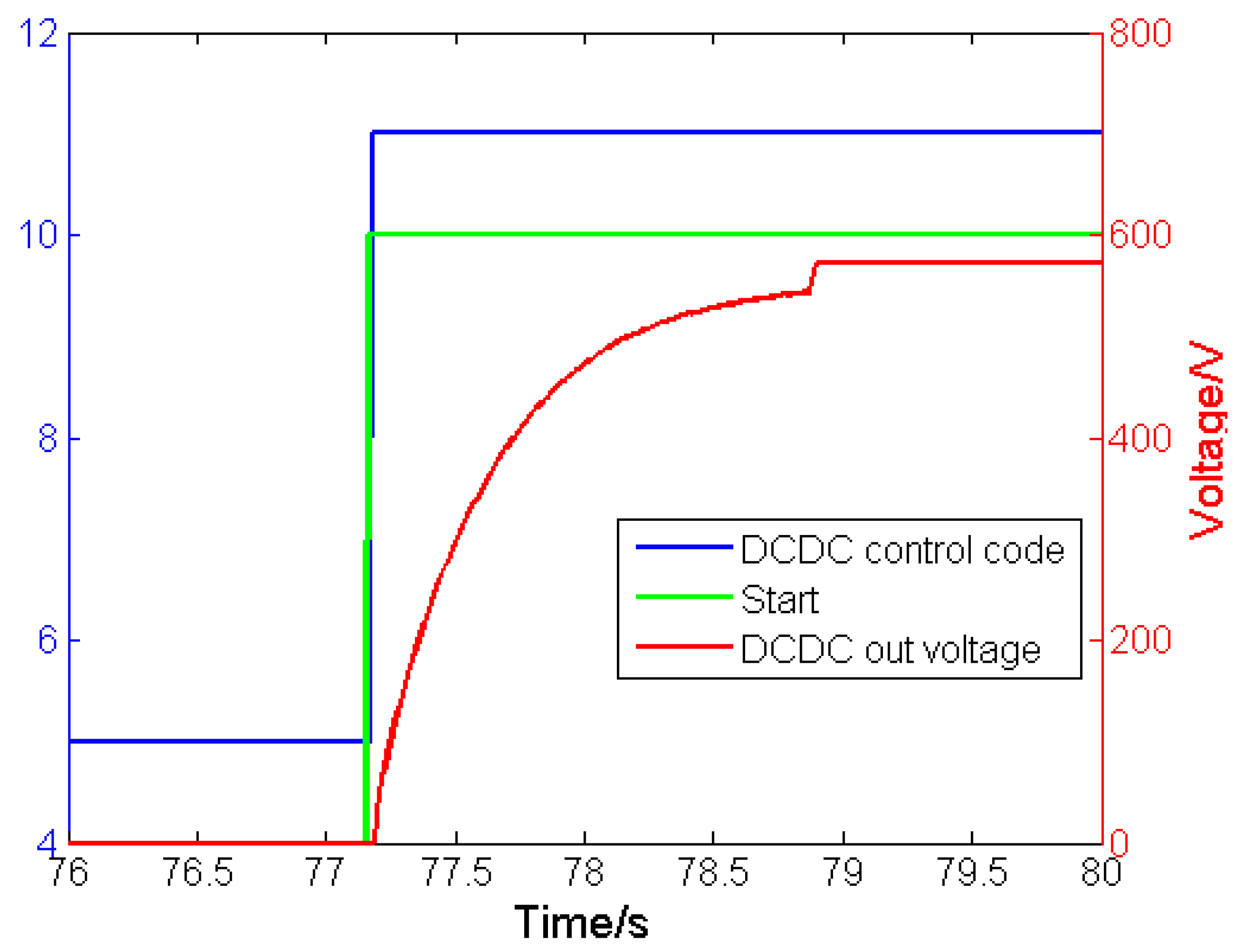
The pre-charge process of the DC/DC converter, shown in
Figure 10, took nearly 2 seconds. It can been seen from the green and blue lines in the figure that as soon as the VCU received the “start” signal from the driver, it sent a command to the DC/DC to change the control code from 5 to 11, which meant that the operation mode of the DC/DC changed from off mode to current mode. Then Relay 2 in
Figure 6 was closed and the voltage of the DC/DC started to increase slowly, which was beneficial to the components in the circuit. When the voltage of the DC/DC had almost reached the same voltage as the network bus voltage, Relay 1 in
Figure 6 was closed and Relay 2 was opened. This action caused a small increase in the voltage due to the removal of the resistance. After progressing to this step, the fuel cell was ready to start up if necessary.
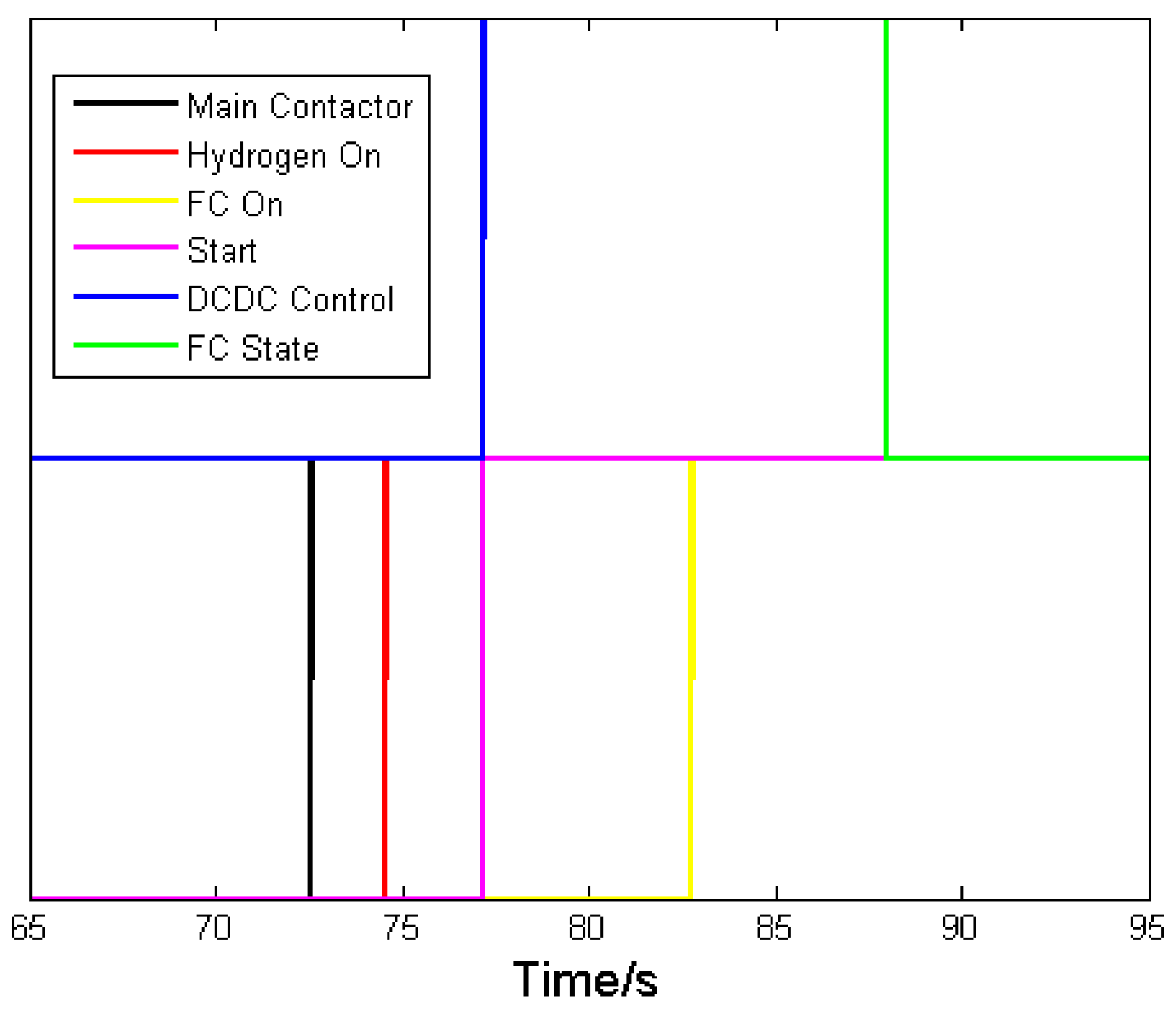
The change order of the main signals is listed in
Figure 11. The start signal changed after the main contact was closed. The FC state signal changed after the DC/DC pre-charge was complete, with the obvious precondition that the H2-Active and FC-On buttons were switched on by the driver. The basic logic for this is as follows. First, no signals would change without the necessary change in the main contact signal. Second, H2-Active came on earlier than FC-On in order to prevent fuel starvation. Third, the DC/DC started earlier than the fuel cell system to ensure that the system could output power as soon as it was started.
4.2. Dynamic Performance
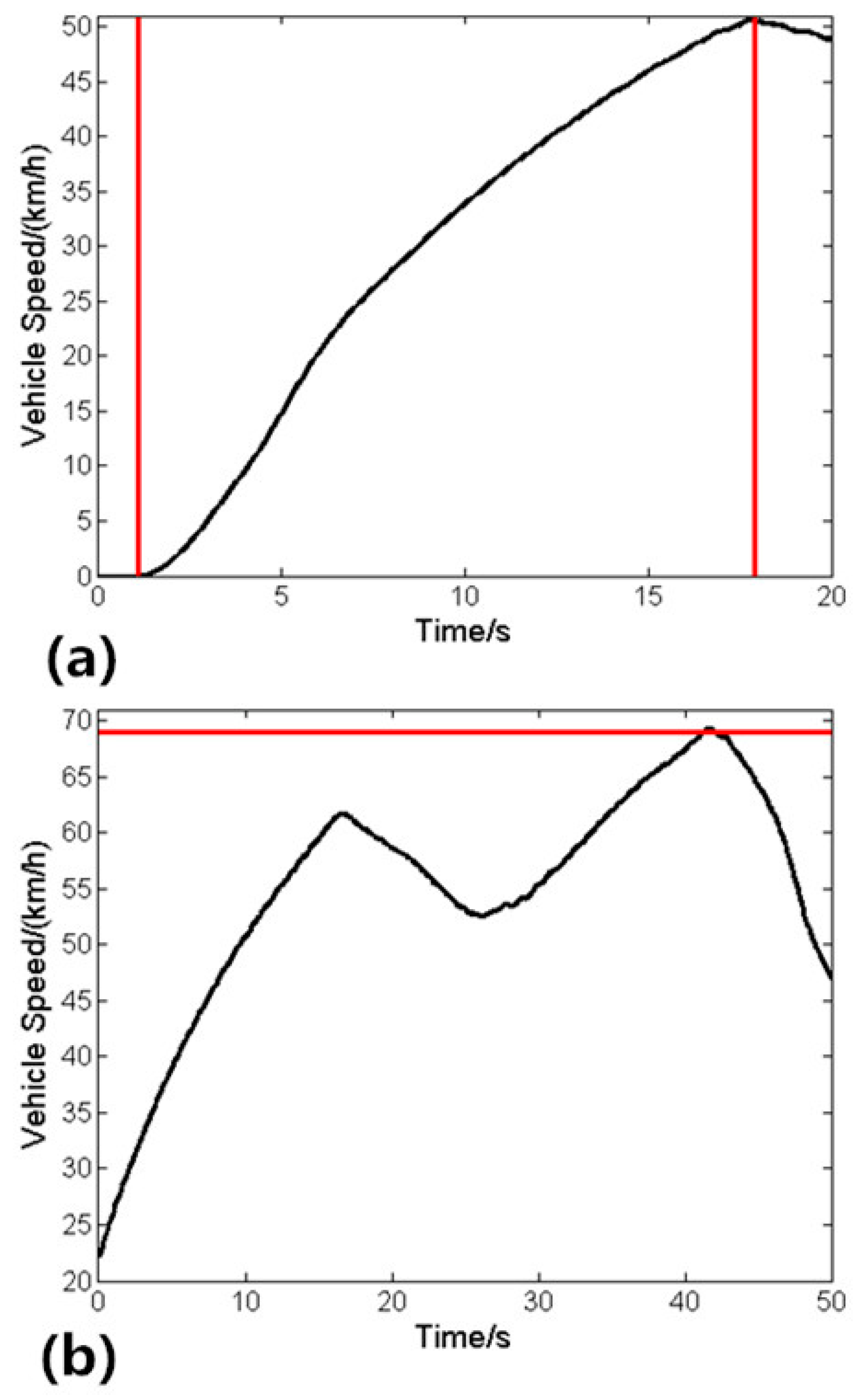
Two main indices of dynamic performance are acceleration and max speed (
Figure 12). Local regulations required that the city bus should be able to accelerate from 0 km/h to 50 km/h is less than 23 seconds and the max speed should be 69 km/h.
The results showed that the acceleration time was significantly less than 20 seconds. The velocity curve in
Figure 12b shows that during travel, the vehicle did indeed reach 69 km/h on one occasion, which means the maximum speed criterion was satisfied. The bus is not able to exceed the maximum speed of 69 km/h since the DICO limits the speed to 69 km/h.
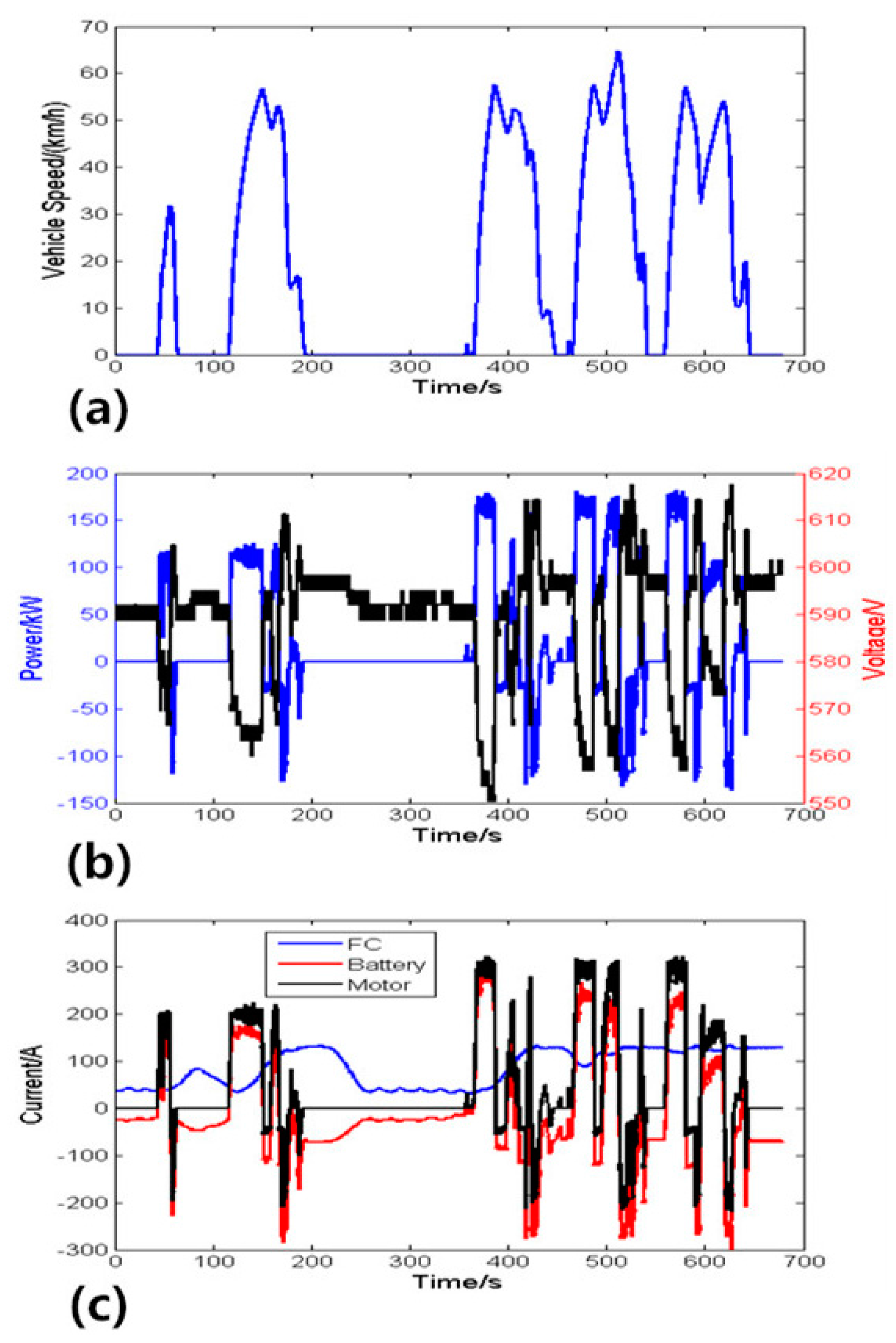
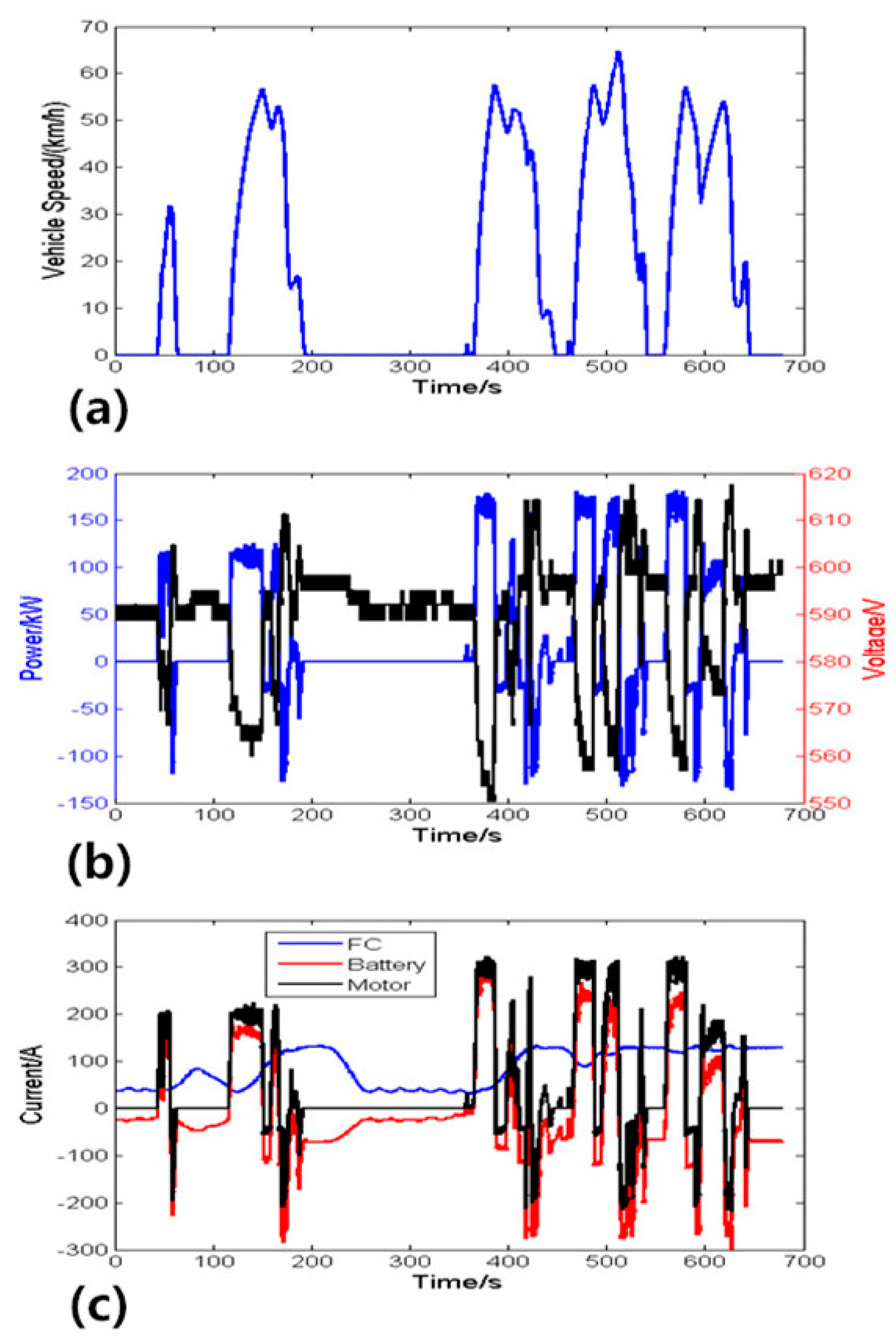
The test performance results are shown in
Figure 13.
Figure 13a shows the speed trend and
Figure 13b shows the power and voltage trends. Obviously, power and voltage have different trends owing to the characteristics of the battery system.
It can be seen from
Figure 13c that the current of the motor, which is represented by the black line, altered sharply due to the change in power demand of the vehicle. However, as can be clearly seen in this figure, the trend of the red line is almost the same as that of the black line, which means that the sharp change of the power demand is mainly borne by the battery. The energy management strategy made the output current of the fuel cell system change slowly, just fast enough to be able to satisfy the average power demand of the city bus. A lower change rate avoids many detrimental conditions such as local fuel starvation and local oxygen enrichment, so it is beneficial for fuel cell durability.
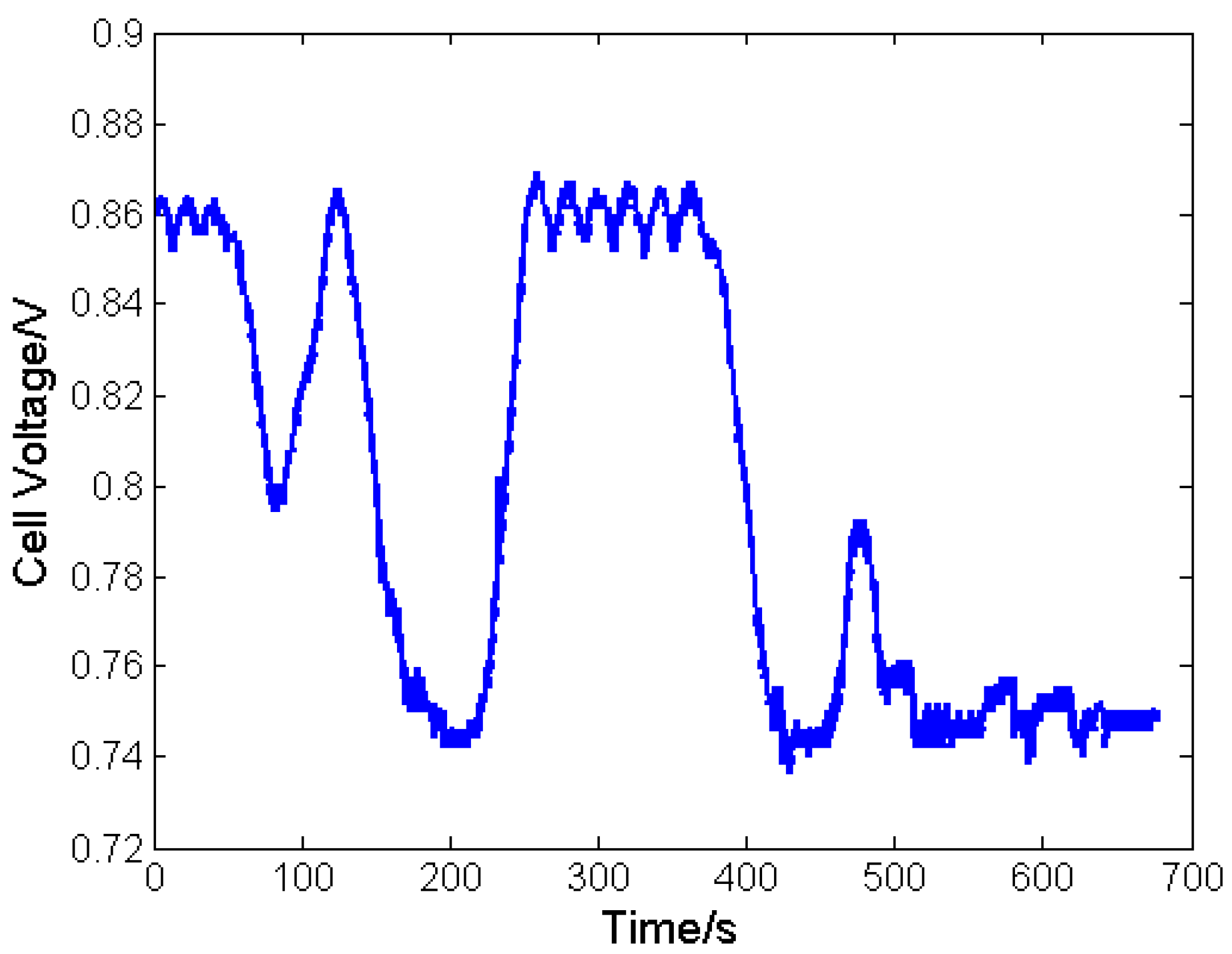
Furthermore, as shown in
Figure 14, the cell voltage was limited to around 0.85 V by the control strategy. It has been confirmed by several researchers that high voltage is harmful to fuel cell durability, so idle or small load conditions should be avoided as much as possible. The results show that once the current decreased to a certain value and the cell voltage exceeded 0.85 V, the control strategy limited the decrease of the current and maintained the voltage. This process can be seen by the voltage fluctuation in
Figure 14.
4.3. Economic Performance
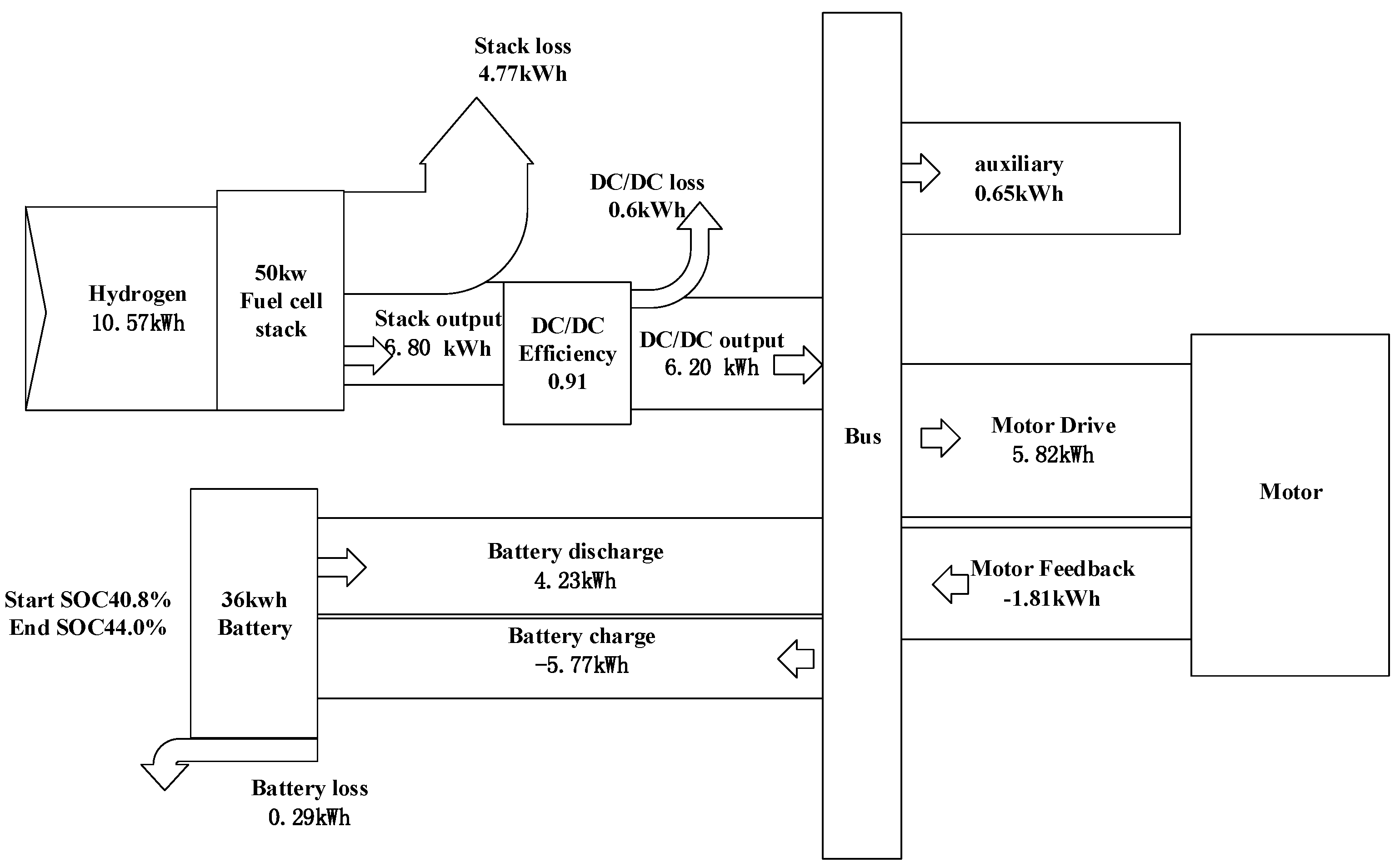
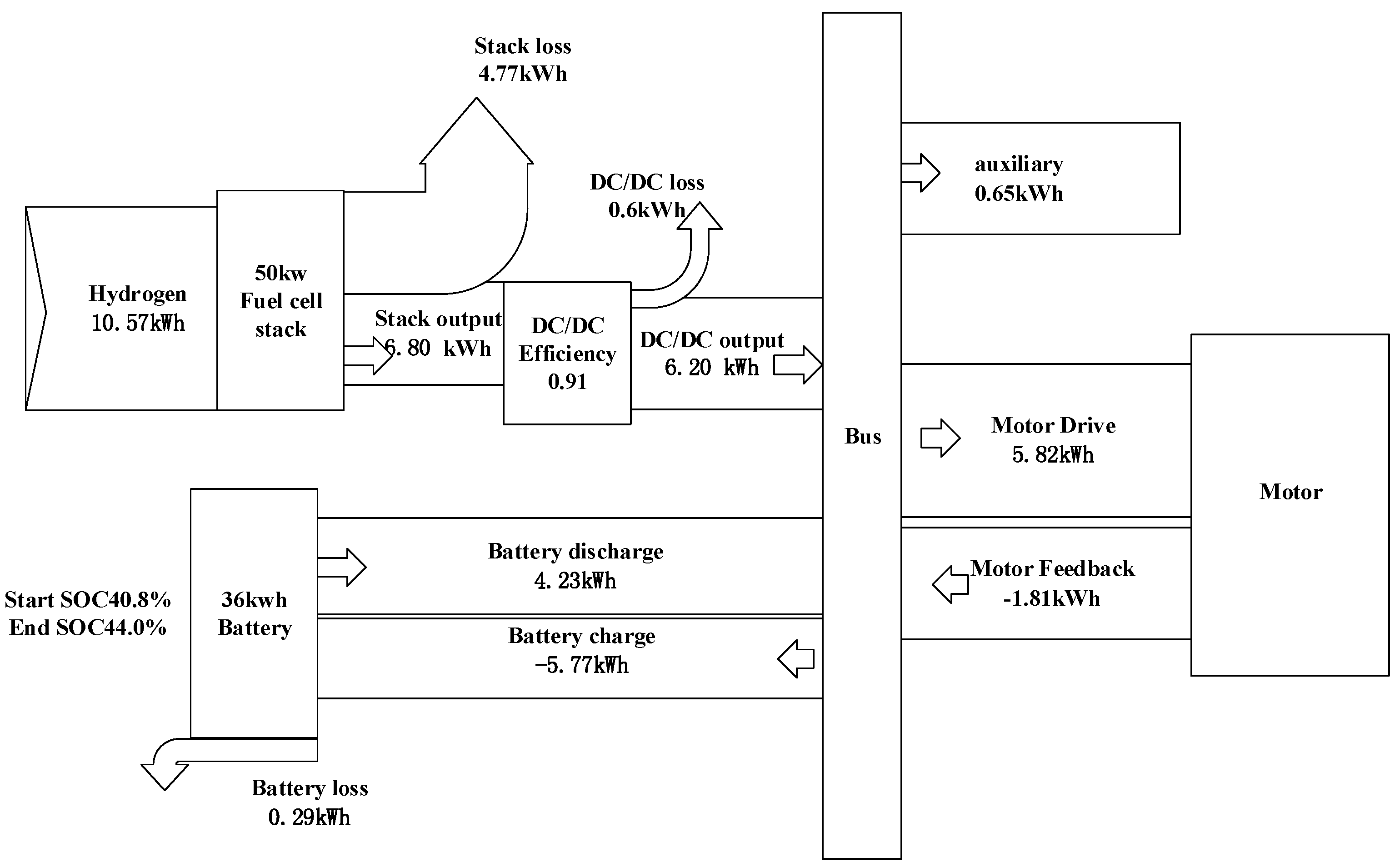
The Sankey diagram of a typical trip is shown in
Figure 15, all the input energy (10.57 kWh) is from the hydrogen consumption. The lower heating value of hydrogen is used. It can be seen that even taking auxiliary power into consideration, the combined efficiency of the stack and the DC/DC converter was about 52.5% × ((6.20−0.65)/10.57), which is higher than the internal combustion engine. The overall efficiency of the battery was more than 97% (1 − 0.29/(4.23 + 5.77)), so the battery is an ideal energy storage device. The energy used to drive the motor is 5.82 kWh, of which 1.81 kWh is recycled by brake energy regeneration.
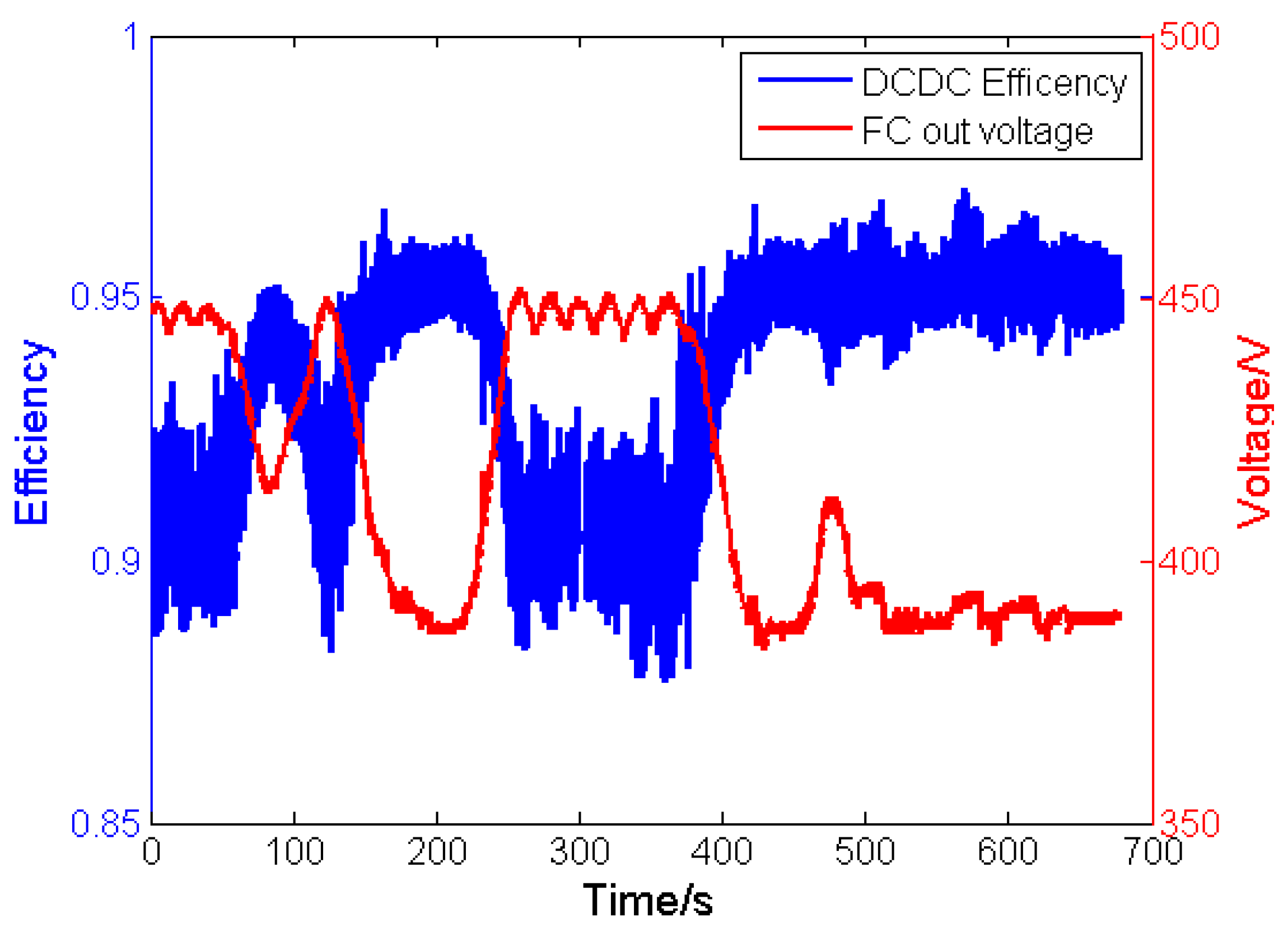
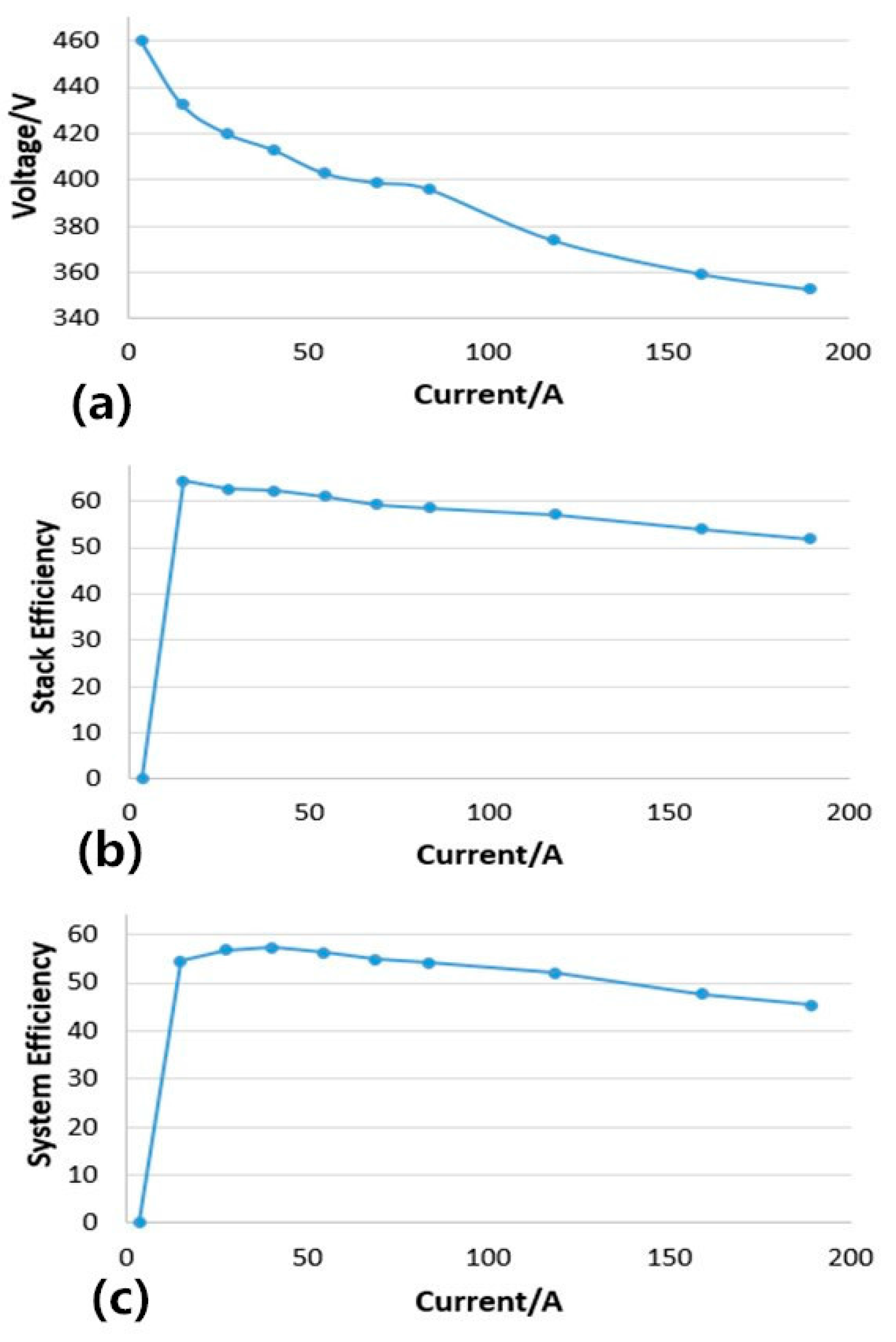
Owing to the high efficiency of the battery, the main energy losses were stack loss and DC/DC loss. The stack efficiency is determined by the stack voltage, and the DC/DC efficiency is also influenced by the stack voltage (
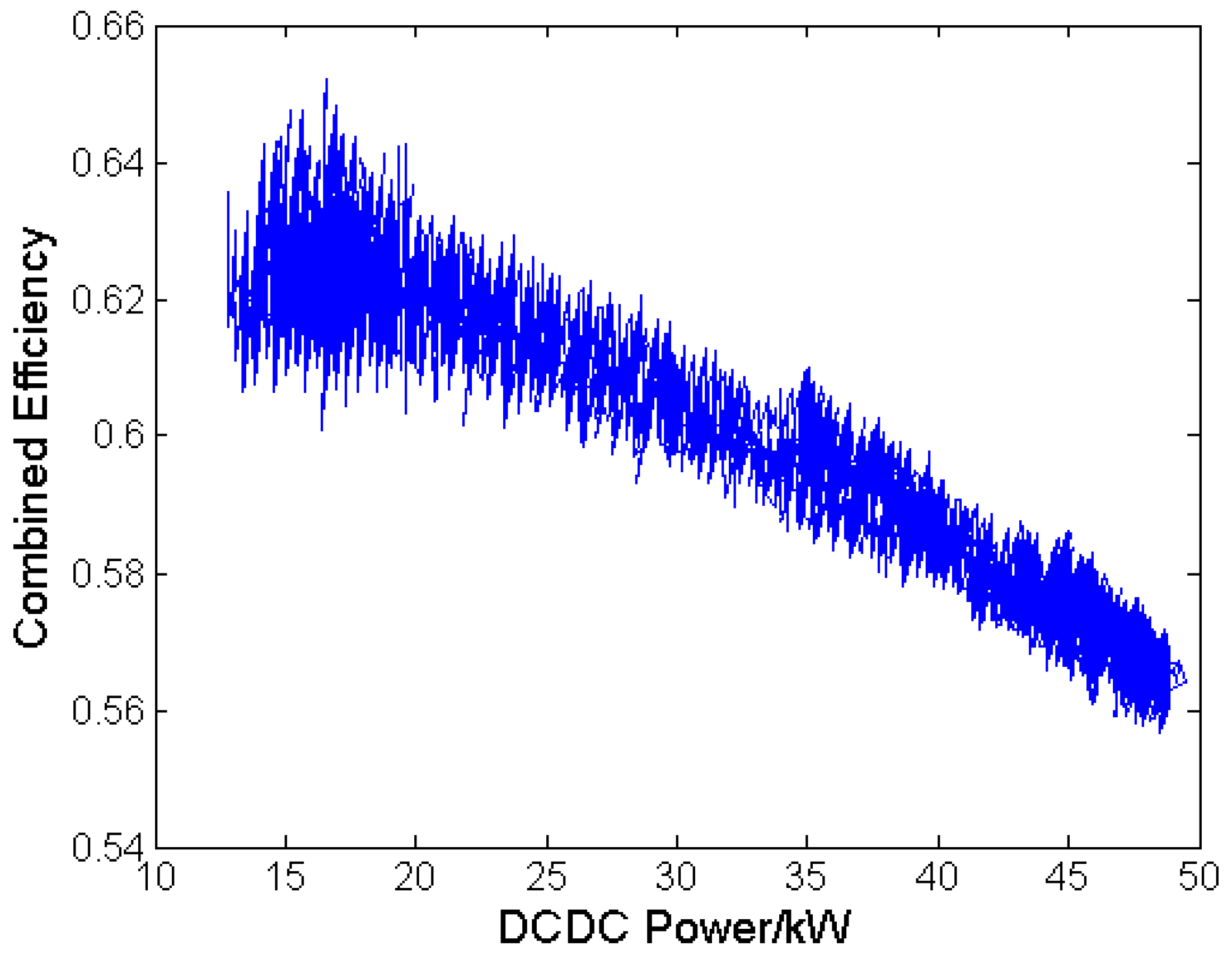
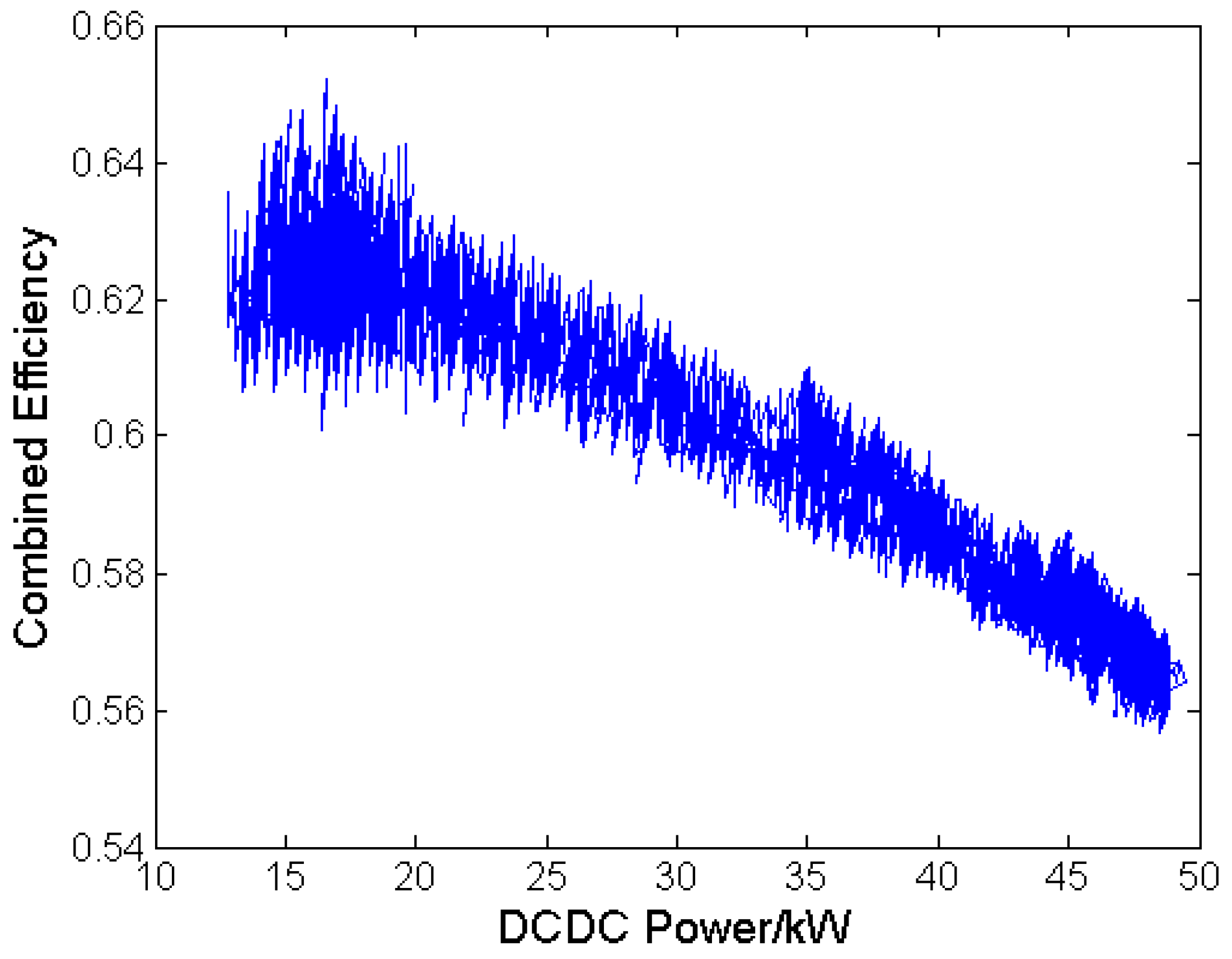
Figure 16). The lower stack voltage meant a higher DC/DC efficiency. The combined efficiency, which is product of DC/DC efficiency and fuel cell efficiency, is shown in
Figure 17. The trend shows that higher power corresponded to lower efficiency. The reason for this was that the efficiency of the stack decreased more rapidly with the power increase and the efficiency of the DC/DC increased more slowly.
Due to the voltage limitation, the DC/DC output power was always larger than 13 kW. When the output power was lower than 20 kW, the combined efficiency was almost identical. Furthermore, as long as the output power of the DC/DC was larger than 20 kW, the combined efficiency decreased almost linearly.
4.4. Discussion
The application of pre-charge helps to protect the DC/DC and the main relay, which means an enhancement of system reliability. In addition, proper strategy is utilized to keep every component working in right order to make sure that the vehicle works in the safe mode.
The acceleration and max speed performance can be satisfied mainly owing to the ability of battery system and motor. Thanks to the large capacity of the battery, it is not necessary for the fuel cell to supply the instantaneous power. This is the precondition that allows the energy management strategy to regulate the fuel cell power. Apparently, results show that the fuel cell power changes slowly and the high voltage condition is avoided. Both are of great help to the durability of the fuel cell. Further research should be done to deal with the fluctuation caused by voltage limiting strategy.
The combined efficiency is directly related to the hydrogen consumption, and higher efficiency equals to lower hydrogen consumption. The small load conditions persist with large load conditions at the same time, while higher power means lower efficiency, the power lower than 20 kW does not mean higher efficiency. This phenomenon indicates that a load smaller than 20 kW should be avoided if the average power demand of the vehicle is greater than 20 kW. In addition, assuming that the battery SOC is 100% at the start of daily driving, then, at the end of the day, the lower SOC, the better. Because lower SOC means that the battery offers more energy and the fuel cell offers less, thus the average power of the fuel cell would be lower, which means higher combined efficiency.
5. Conclusions
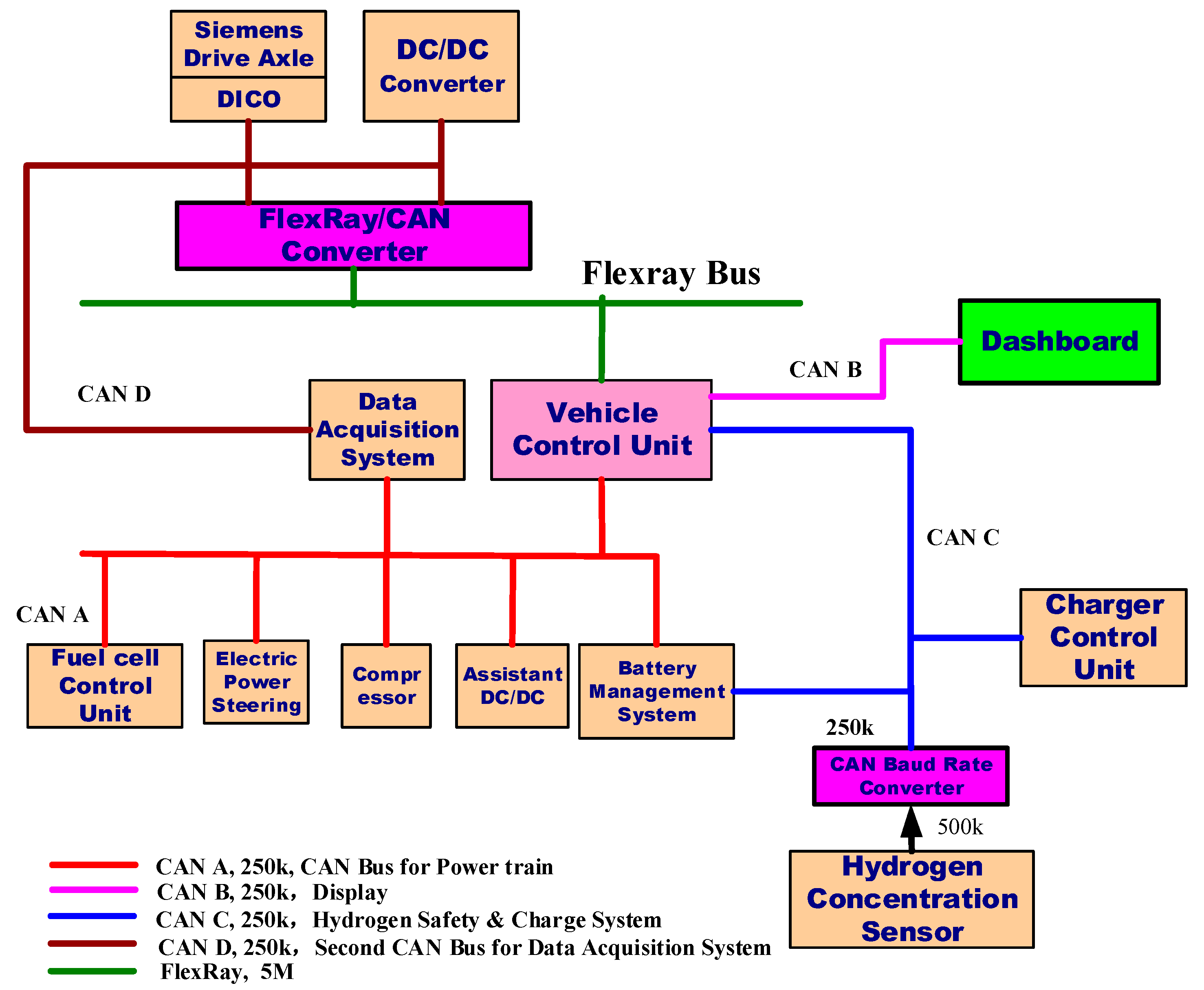
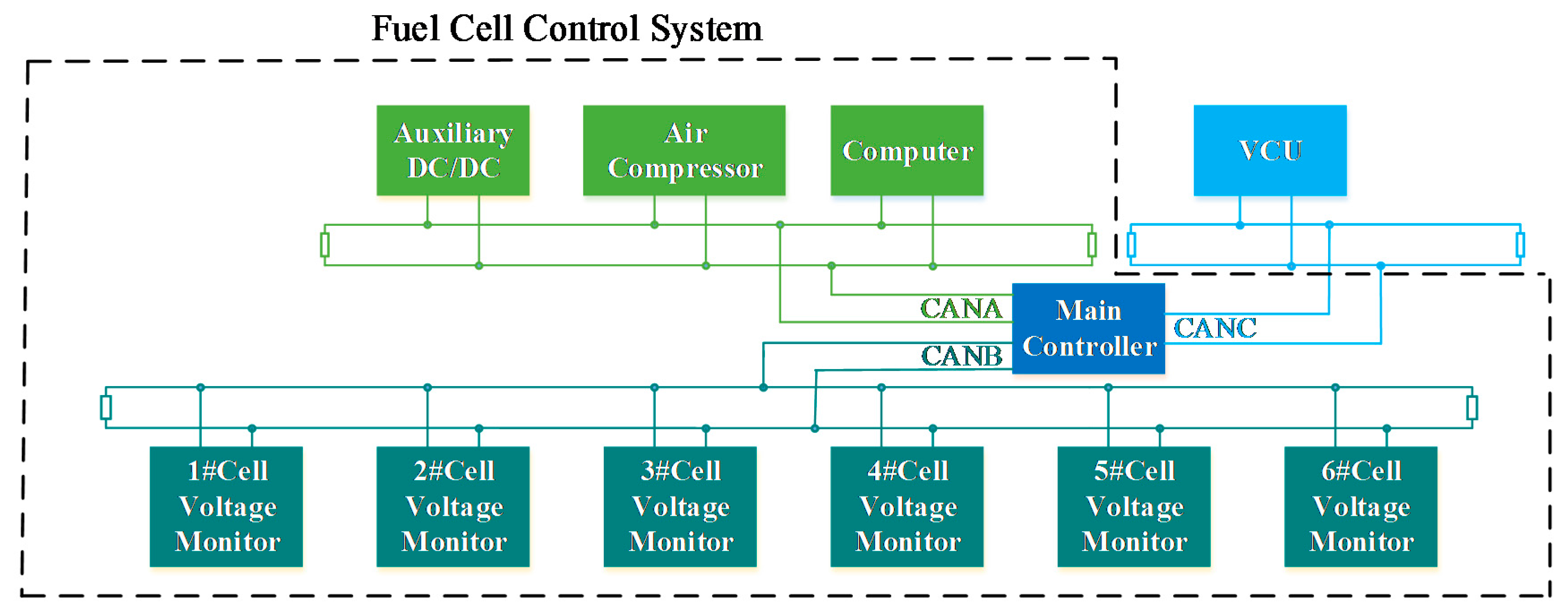
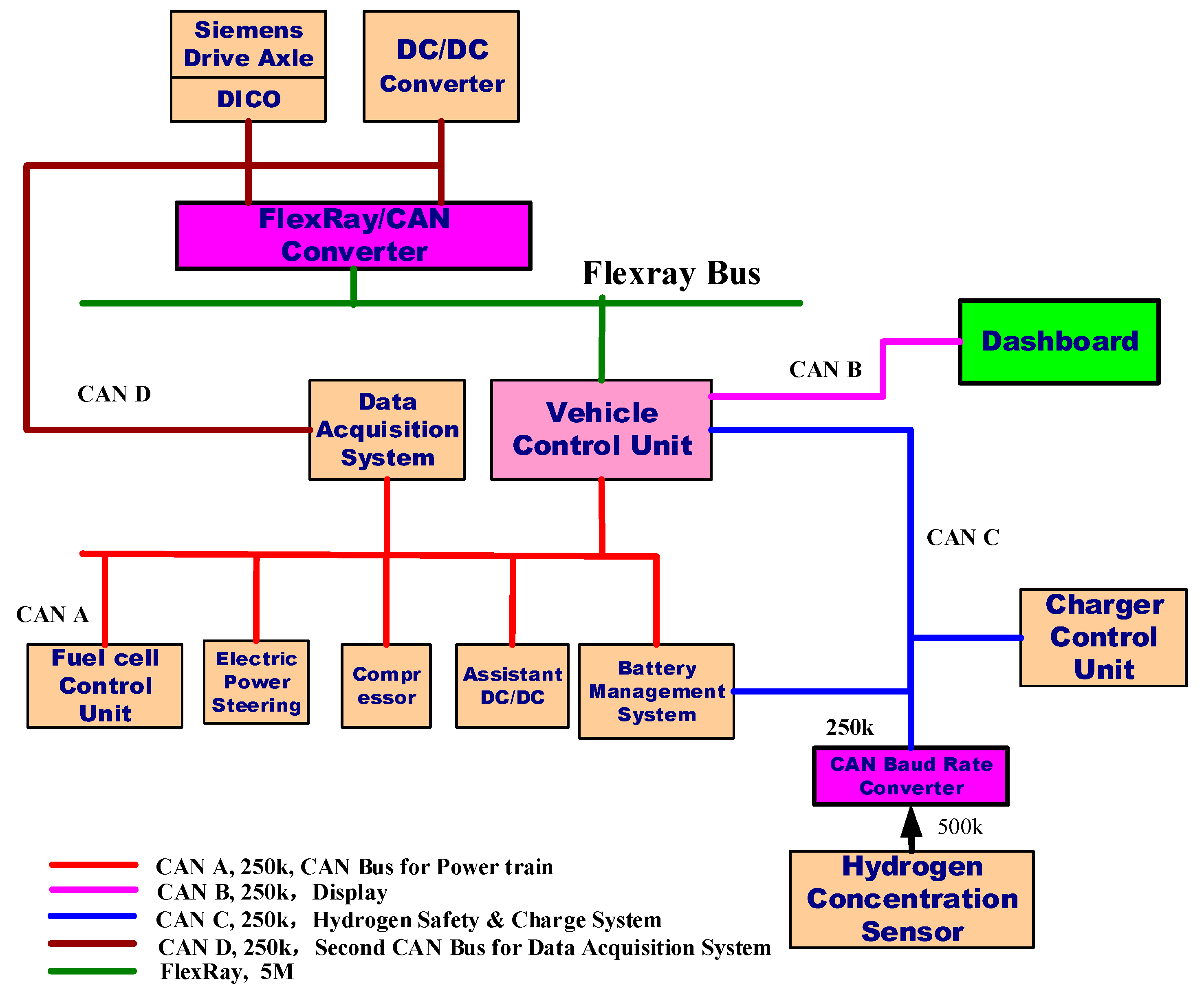
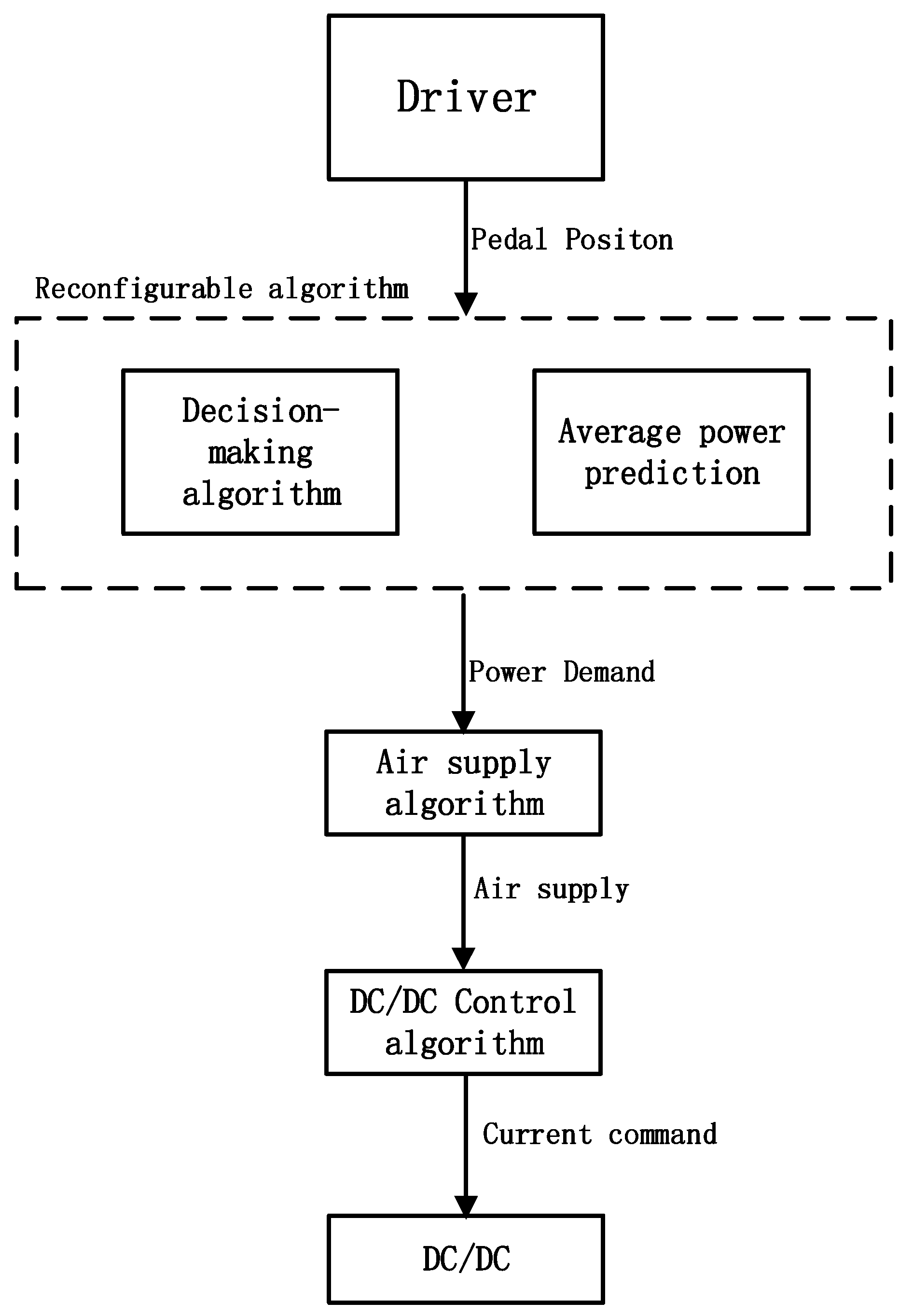
Owing to the complexity of the hybrid fuel cell powertrain, a networked hierarchical control system is necessary. The networked control system consists of a hierarchical structure with four layers. The driver constitutes the top layer, and the vehicle control unit the second layer. The third and the fourth layers are designed for the fuel cell systems and the battery packages, respectively. The control strategies cover two aspects: the vehicle control strategy, and the fuel cell control strategy.
The vehicle control strategy consists of a start-stop strategy and an energy management strategy. The first strategy ensures that the system functions in safe mode. Every component functions in the correct order and the voltage of the DC/DC converter rises slowly, thus ensuring the durability of the relevant components. The second strategy manages the fuel cell output so as to reduce hydrogen consumption and enhance system durability. The two elements, a large power change rate and a high voltage condition, which diminish fuel cell durability, are both avoided. The hydrogen consumption can be optimized by avoiding small load conditions. Furthermore, the accelerating time and maximum speed requirements are both satisfied.
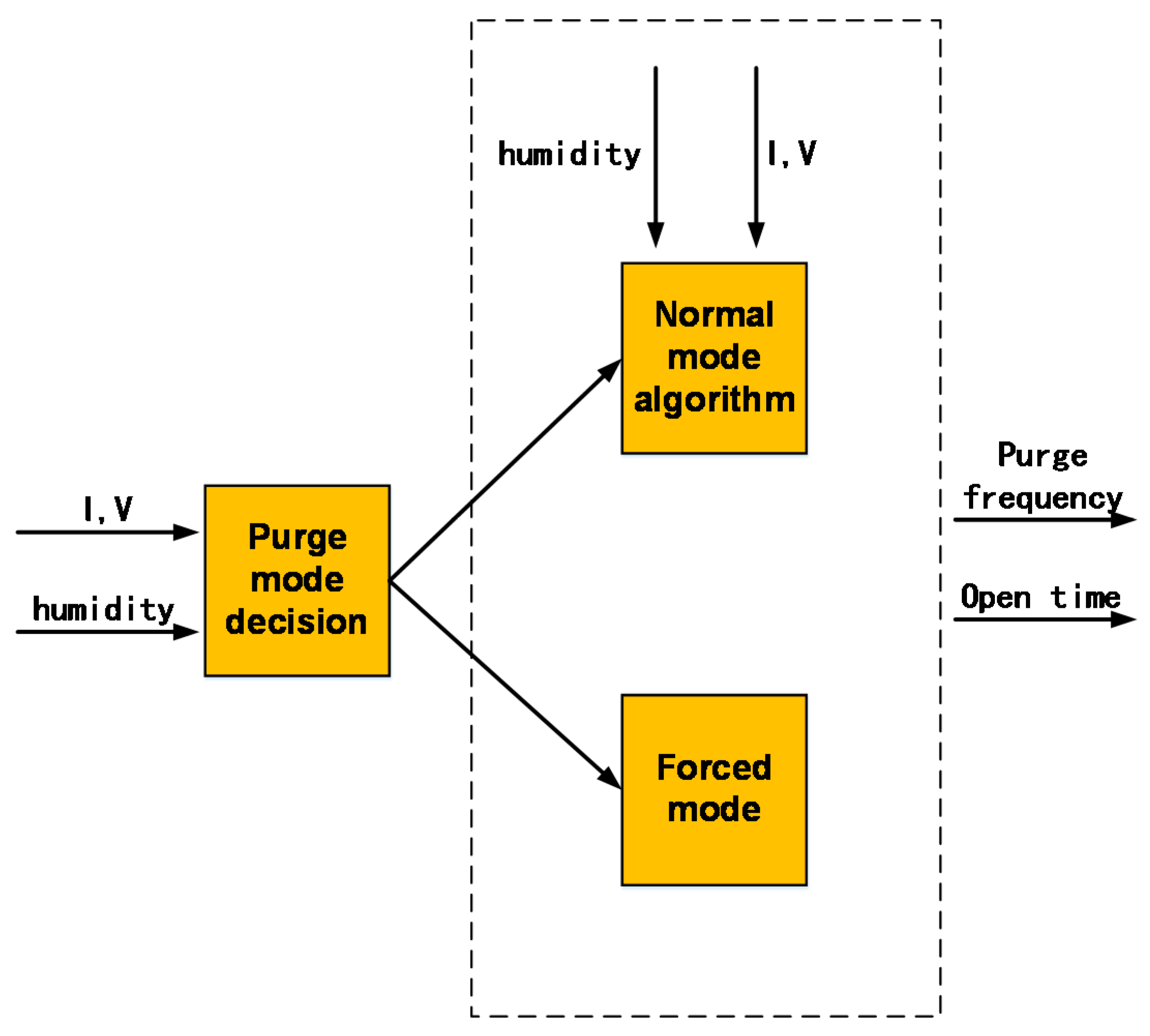
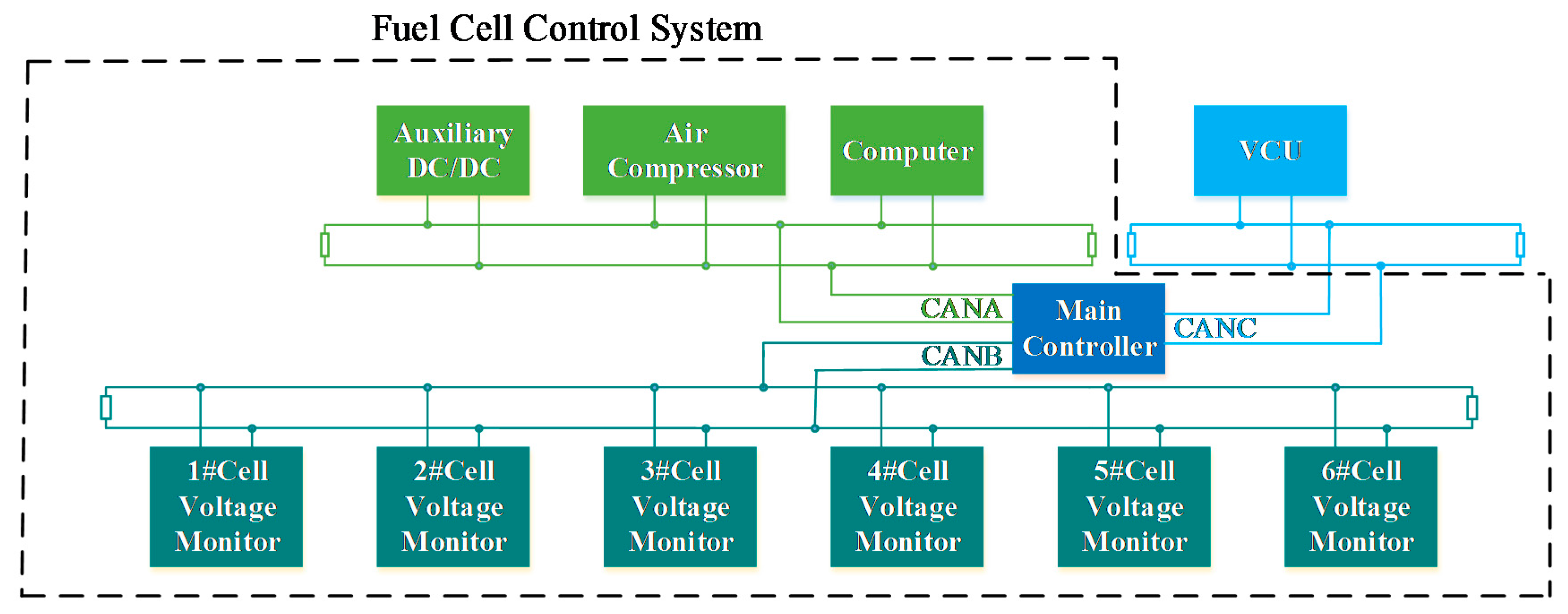
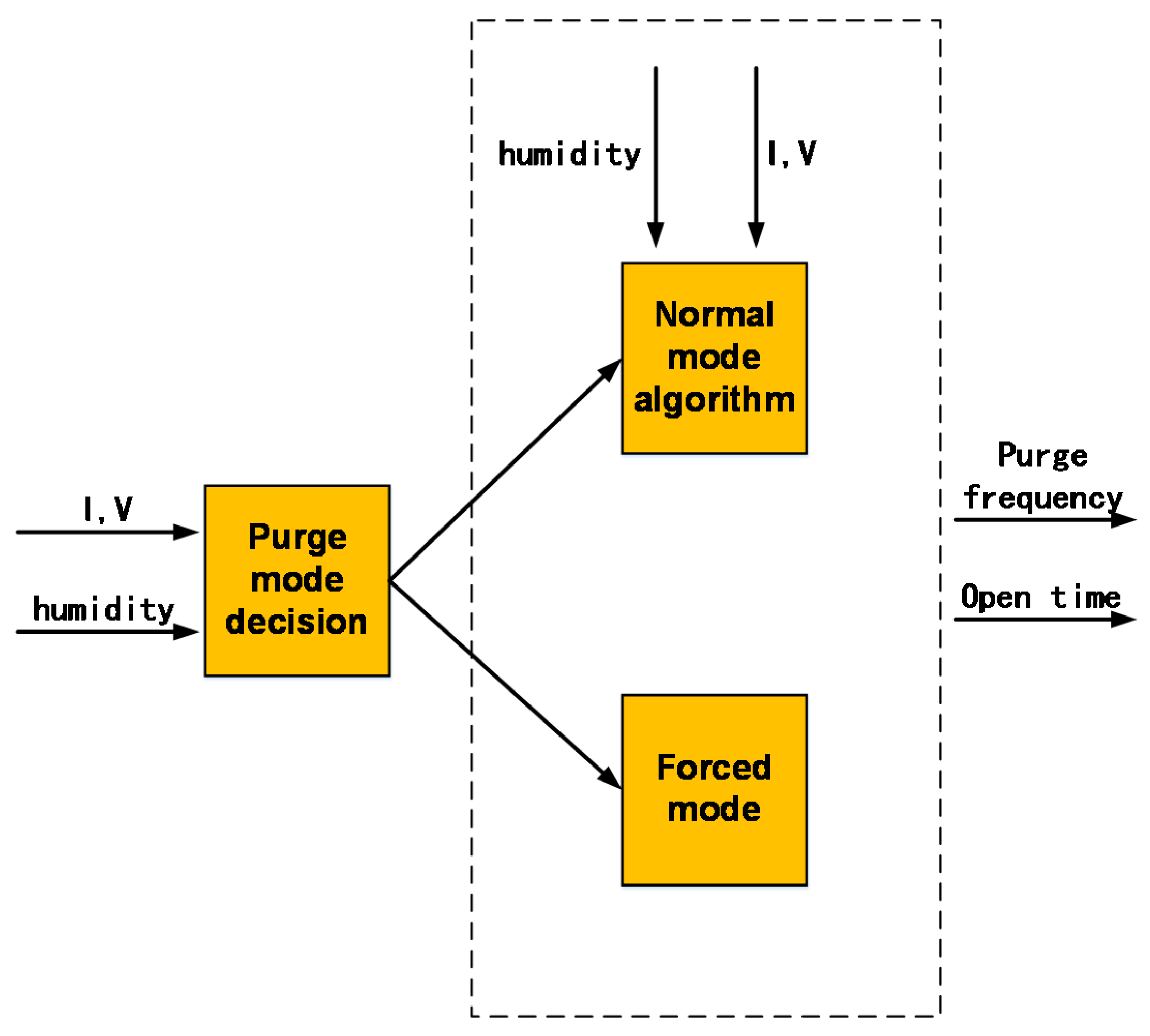
For the fuel cell control system, we introduced the control strategies for the air supply system and the hydrogen supply system. Because the fuel cell is a passive power source, a simple feed-forward control strategy is used to control the air supply. For the hydrogen system, a normal and a forced purge strategy are applied so as to take into account both the hydrogen utilization ratio and the system performance. This paper developed a PEM fuel cell city bus with a hierarchical control system. The control strategy helps to improve the reliability, durability and efficiency. This is a reference for the development of new energy vehicles. Of course, there is still much room for improvement, such as the economy performance can be better optimized based on the real road condition.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}