1. Introduction
With the rapid development of society and economy, higher requirements are put forward for energy use, which include being more reliable, flexible, and efficient; adaptive to various actual application situations;
etc. Electric energy is one preferable form of energy in daily life and industrial production. Electric energy can be transferred into other forms of energy, such as thermal energy, optical energy, mechanical energy,
etc. As is well known, electromechanical systems play the role as a bridge link for energy conversion between electric energy and mechanical energy, and most of the total electric energy is consumed by electromechanical systems [
1,
2,
3,
4]. Therefore, improving efficiency of whole electromechanical system is meaningful for energy conversion.
As for an electromechanical system, the actuator is an important factor to influence efficiency of the whole electromechanical system. Since permanent-magnet synchronous motor (PMSM) has advantages of high efficiency, high power density and high power factor, it can be a favorable actuator in the electromechanical system. In [
5], two brushless DC motors are used to actuate each of two revolute joints of two degrees of robotic manipulator. In [
6], an axial flux permanent-magnet (AFPM) machine is designed for robot joint module. On the other hand, the complexity of electromechanical system, decided by the application domains, also influences the efficiency of the whole electromechanical system. In many applications, such as antenna scanning system, satellite scan mirror system, robot joint,
etc., the driven objects only rotate back and force within a limited angle range. In traditional implementation system, rotating electric machines plus reduction gearboxes are usually adopted to convert the rotating motion to linear motion where necessary [
6,
7,
8]. The complex mechanical structure certainly increases power consumption. However, direct drive servomotor can avoid the complex mechanical structure.
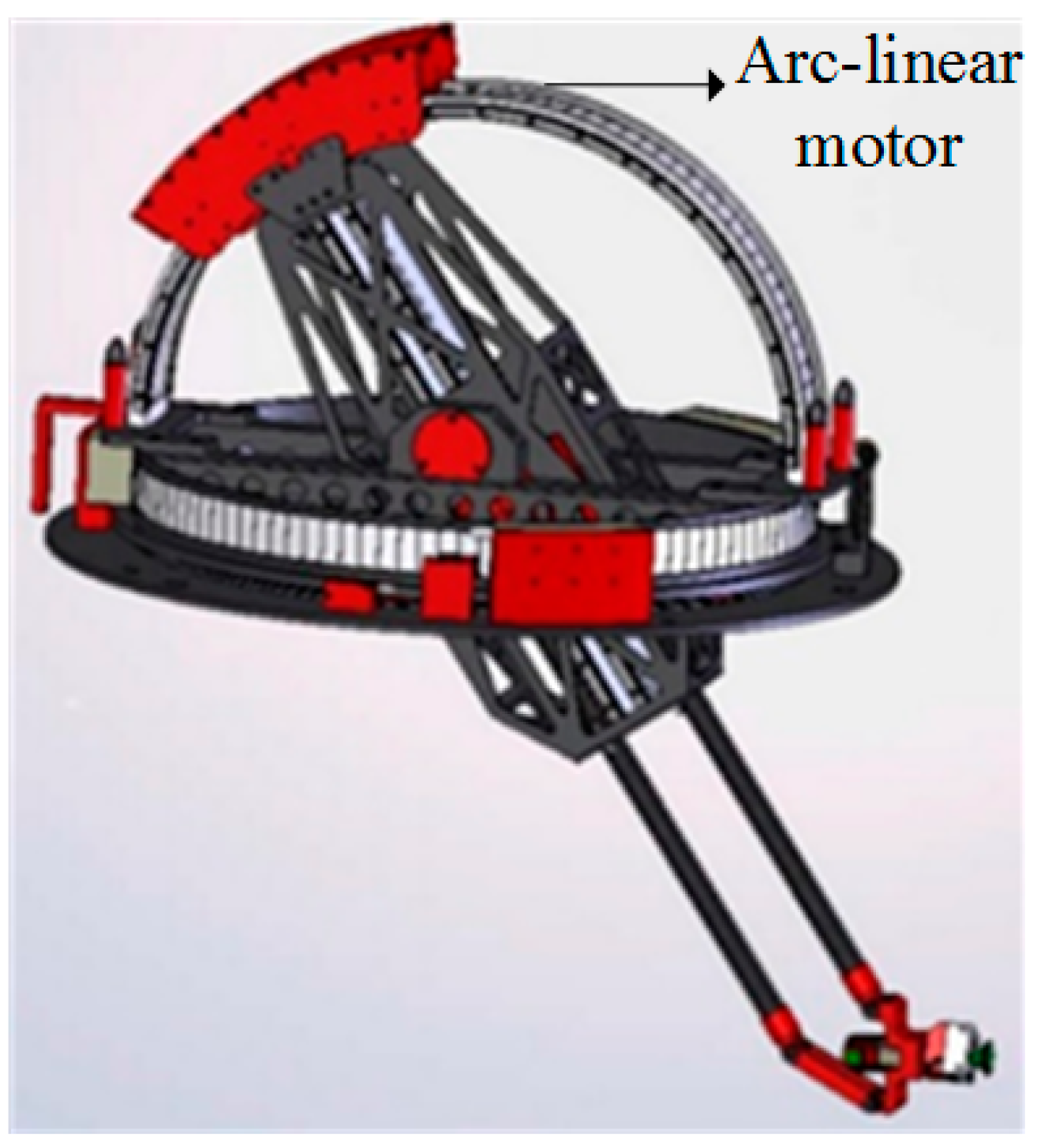
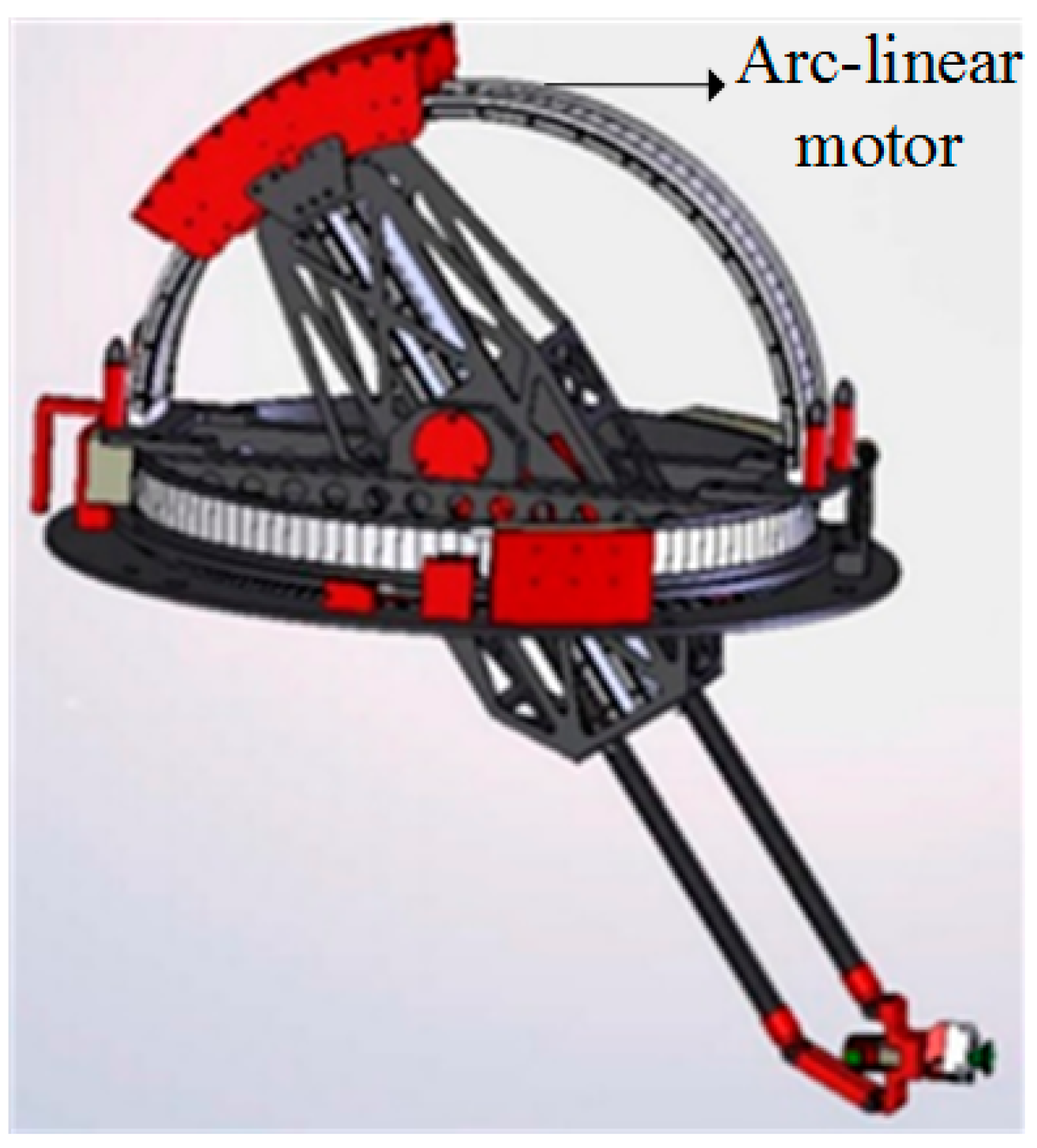
Figure 1 shows one simple example of Galileo Sphere robot [
9]. The arc-linear motor can directly drive the load to operate back and force within a limited angle range that is less than 180° (mechanical angle), which saves space and power consumption and improves the performance of the whole robot.
Instead of rotating motor plus reduction gearboxes, arc-linear permanent-magnet synchronous motor (AL-PMSM) is a good candidate as the drive motor directly connecting the load for these aforementioned applications such as antenna scanning system, satellite scan mirror system and robot. It can also satisfy the requirements of high positioning accuracy and high response performance for these applications. Moreover, the direct drive motor can reduce the additional losses, reduce the backlash, and increase the reliability of the system. The arc-linear motors are researched and usually adopt the mover structure with surface-mounted permanent magnets (PMs) [
9,
10]. However, this kind of AL-PMSM has a limited length of stator structure and PMs are mounted on the whole rotor. Thus, only small parts of PMs are effective during the operation and the PMs that do not produce effective magnetic field may cause electromagnetic interference to peripheral devices. Therefore, this kind of AL-PMSM cannot make full use of the PMs and increases the PMs cost. In recent years, flux reverse permanent-magnet machine (FRPM), double salient permanent-magnet machine (DSPM) and flux-switching permanent-magnet machine (FSPM) have been widely investigated due to the advantages of simple and robust rotor structure that is composed of cheap iron core with salient tooth [
11,
12,
13,
14,
15]. Since the armature windings and the permanent magnets are both installed in the stator of these structures, they can protect the PMs from sliding off caused by centrifugal force and from demagnetizing caused by the heat dissipation difficulties. Compared with the DSPM and the FRPM, the FSPMs have the performances of high power density and sinusoidal back electromotive force (EMF) [
11,
16,
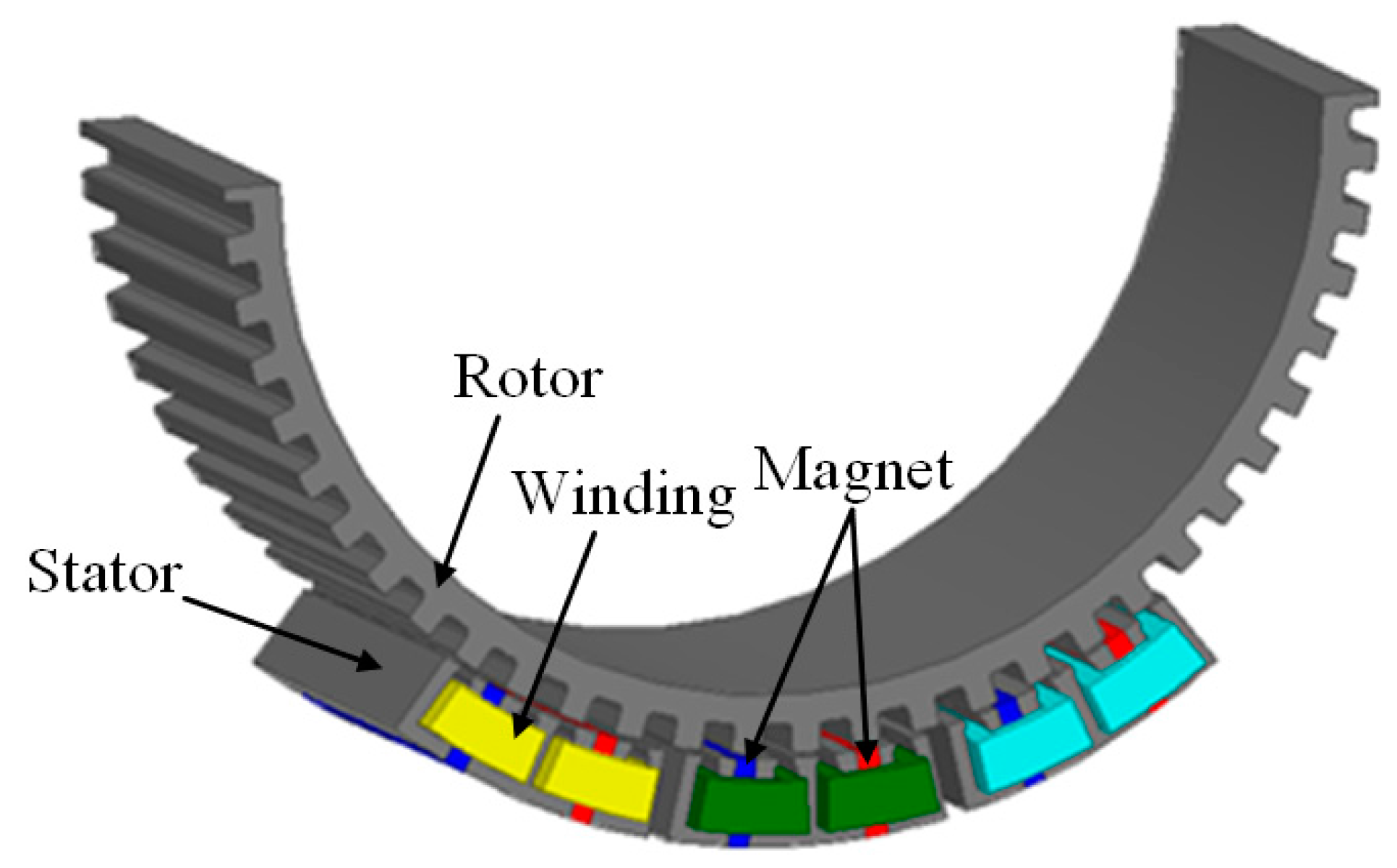
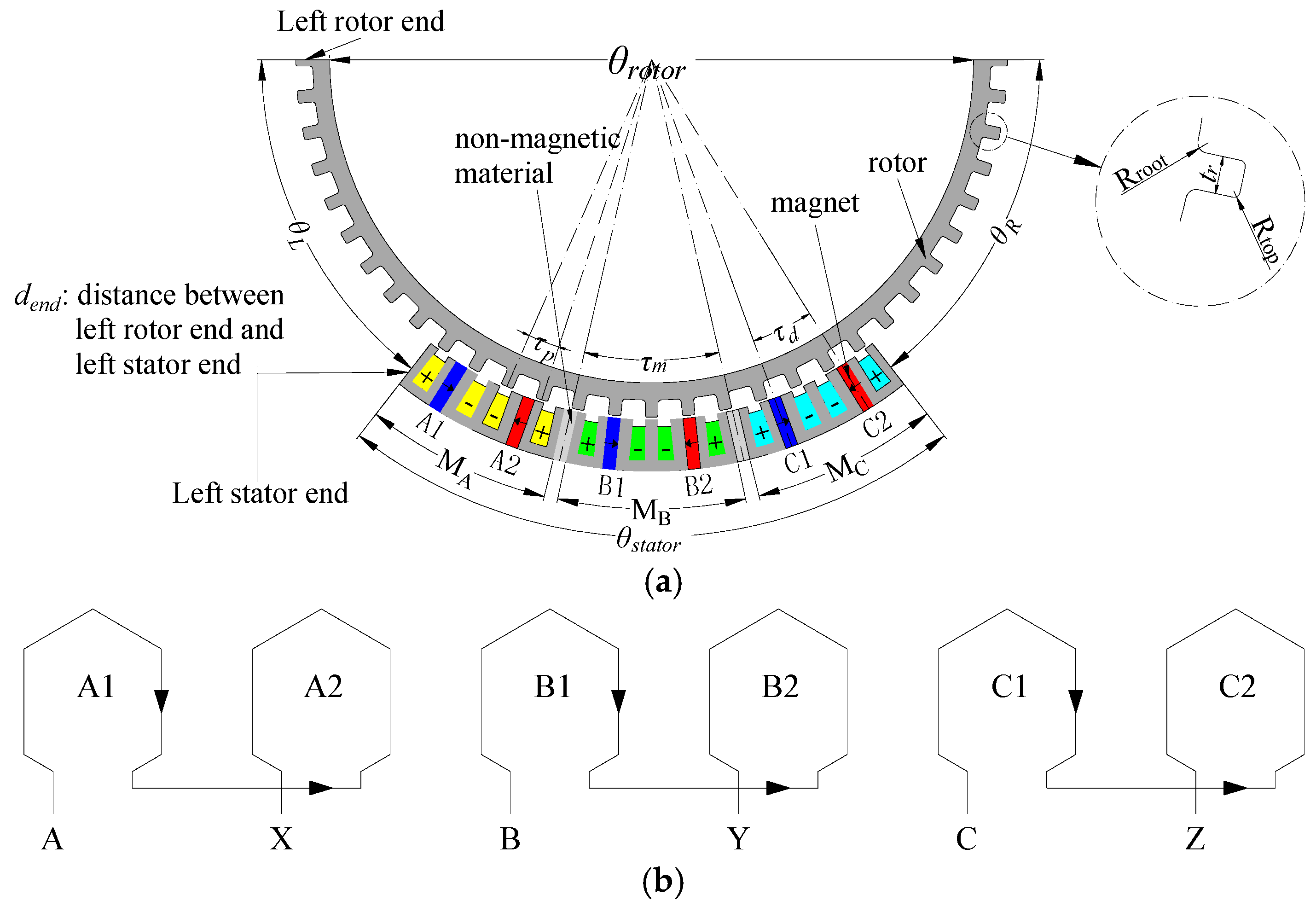
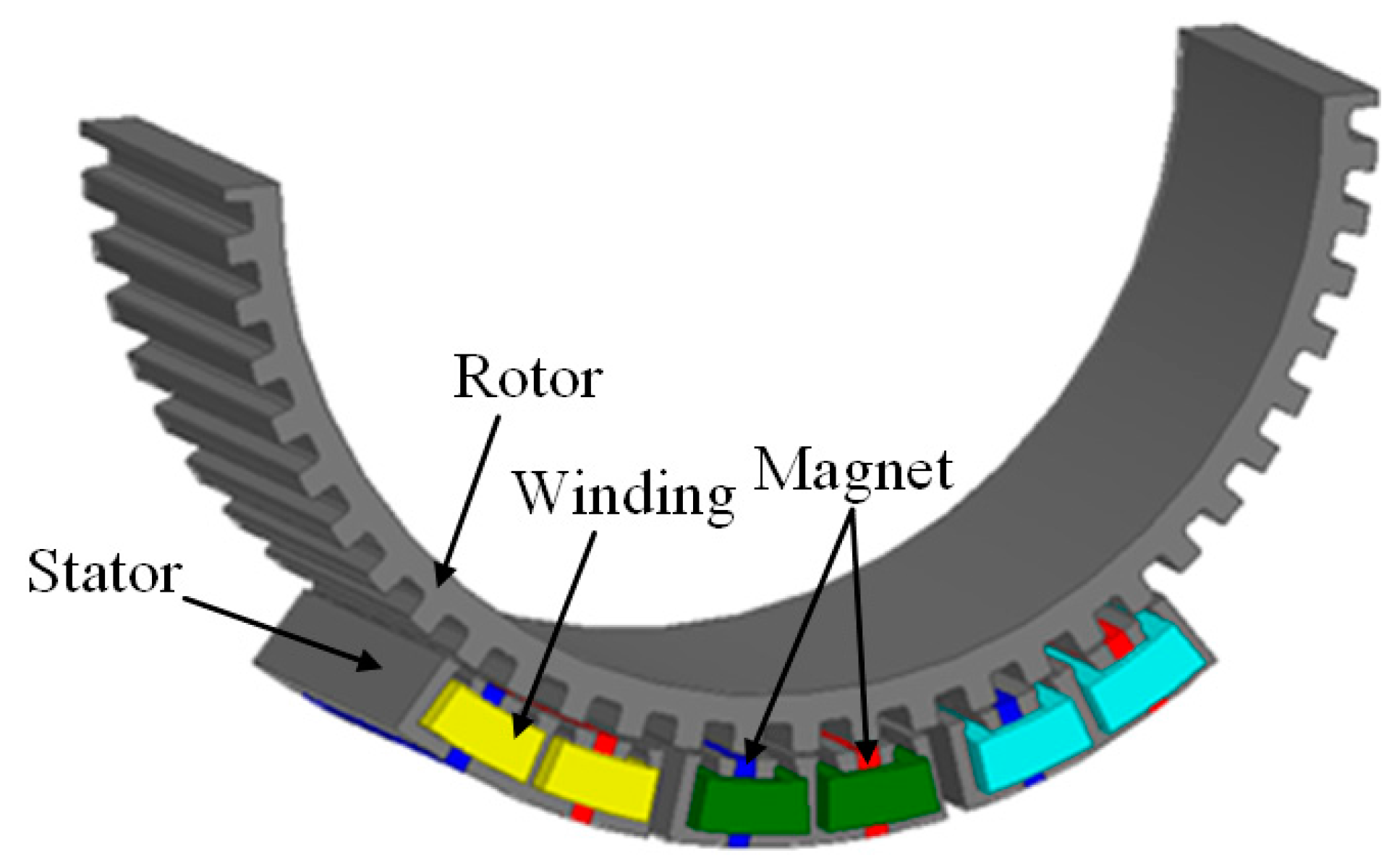
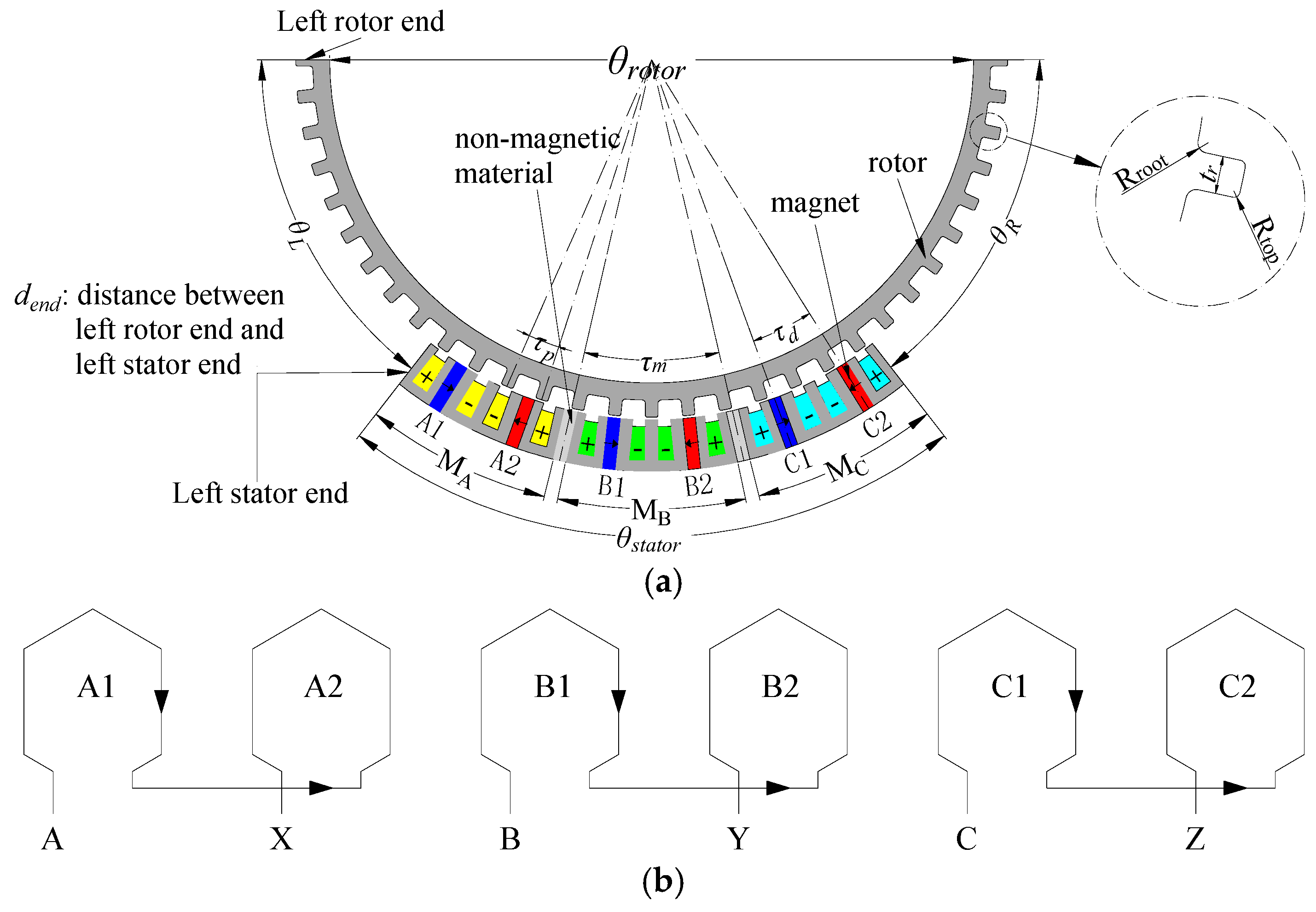
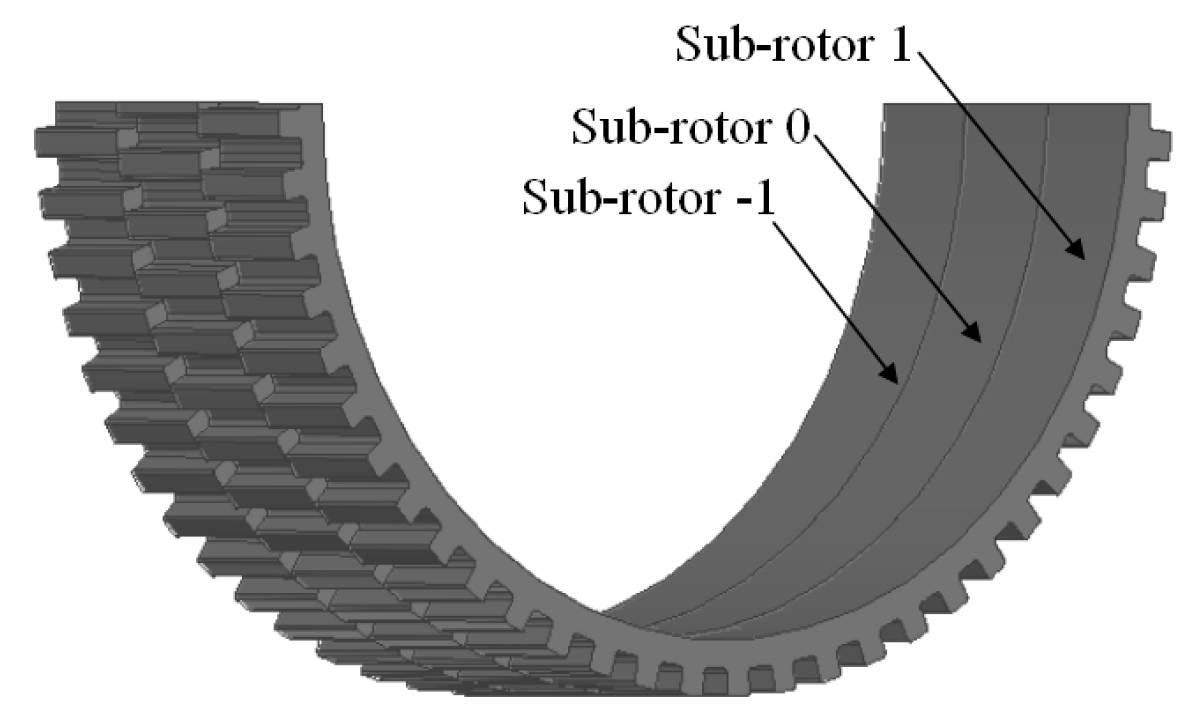
17]. Therefore, this paper researches a novel modular arc-linear flux-switching permanent-magnet motor (MAL-FSPM), which can integrate the merits of high power density and low manufacturing cost, and avoid electromagnetic interference to peripheral devices, as shown in
Figure 2. The MAL-FSPM can be applied in robot fields, radar scanning systems, and so on.
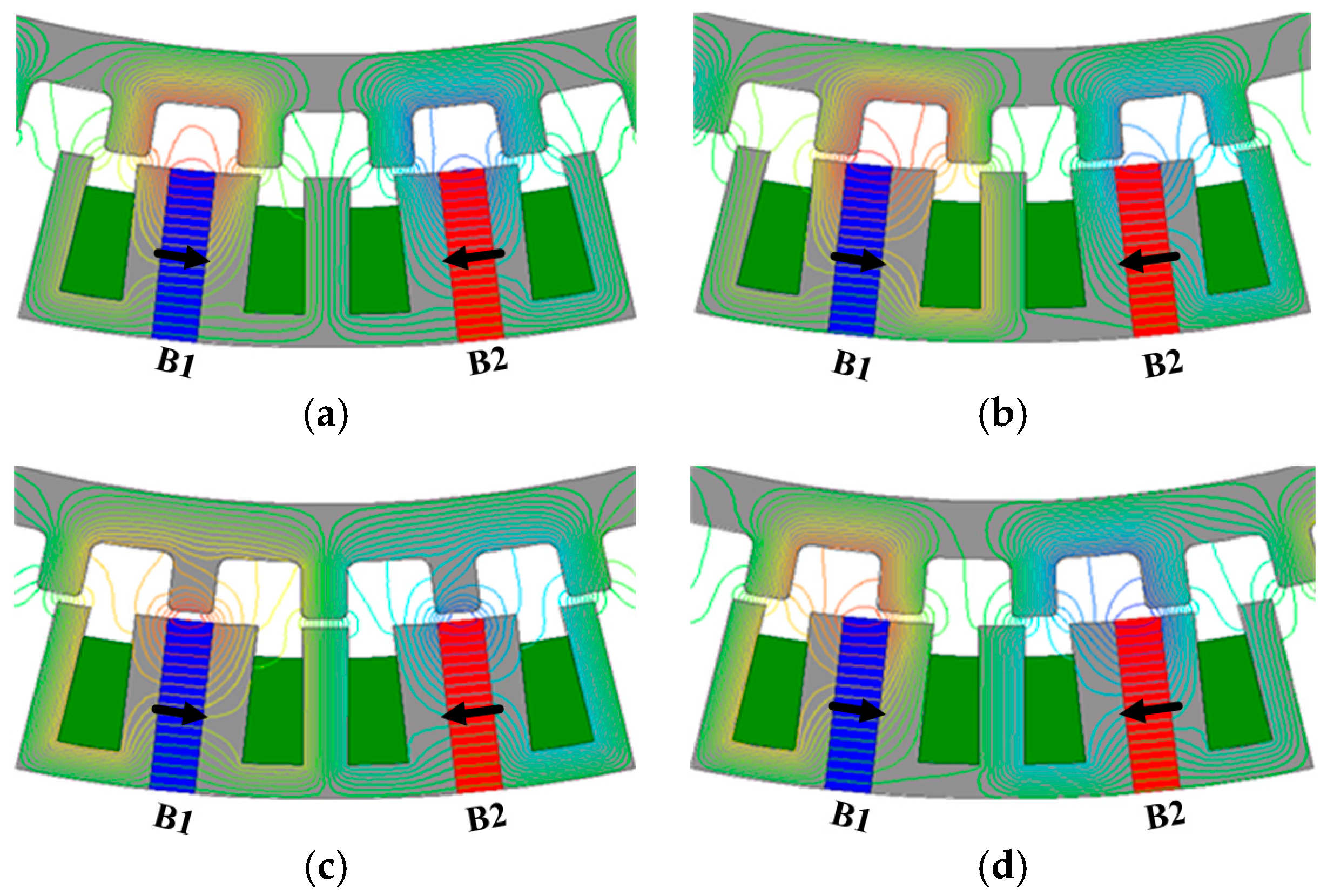
However, due to the inherent double salient effect in the FSPM, torque ripple of the FSPM is relatively high [
18,
19,
20], which is unexpected for a direct driving motor. Because the PMs are located in the stator, slots skewing method, magnet segmentation method and optimization of the pole arc coefficient may be ineffective for the FSPM. Therefore, it is good and convenient to optimize the rotor. For the cogging torque and torque ripple reduction of the FSPM, Reference [
20] verifies that rotor tooth with odd number has lower cogging torque compared with the rotor tooth with even number; multi-tooth structure can reduce the cogging torque and torque ripple [
21,
22]; and rotor tooth shapes combined with stepped and notched technology can greatly reduce the cogging torque [
23,
24,
25]. However, these methods may not be all effective for special structure motor, such as the modular motor. Due to the simple rotor structure, rotor skewing technology is an effective and easy way to reduce torque ripple. Detent force of the flux-switching linear motor is greatly reduced by using the skewing technology [
26]. Torque ripple of 12/10 stator/rotor pole and 12/14 stator/rotor pole flux-switching machine topology is effectively reduced based on the rotor step skewing [
27]. However, the period ratio of cogging torque to the back EMF is ≥3 in [
26,
27]. This paper mainly researches torque ripple reduction for modular motor and arc-linear motor, especially for that period ratio of cogging torque to the back EMF equals one.
A novel MAL-FSPM, which can directly drive the load to rotate back and force within a limited angle range, is proposed and researched in this paper. In
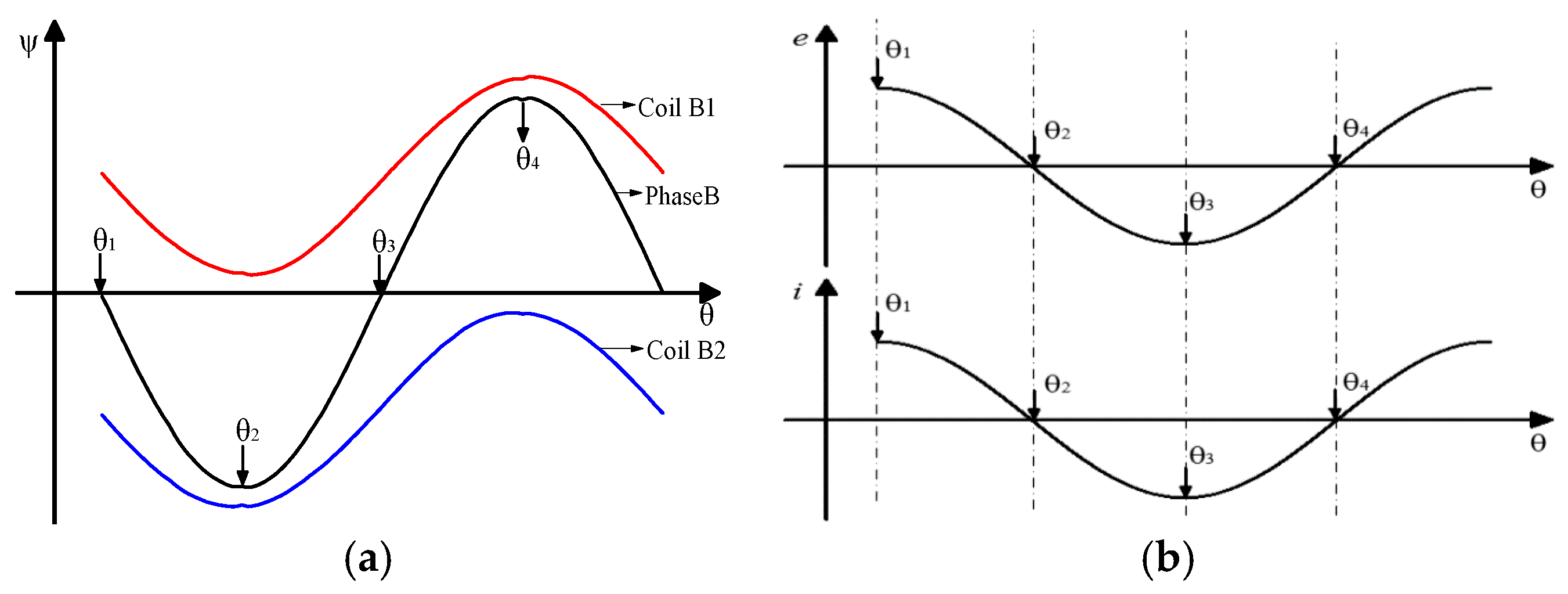
Section 2, structure and operation principle of the MAL-FSPM are introduced. In
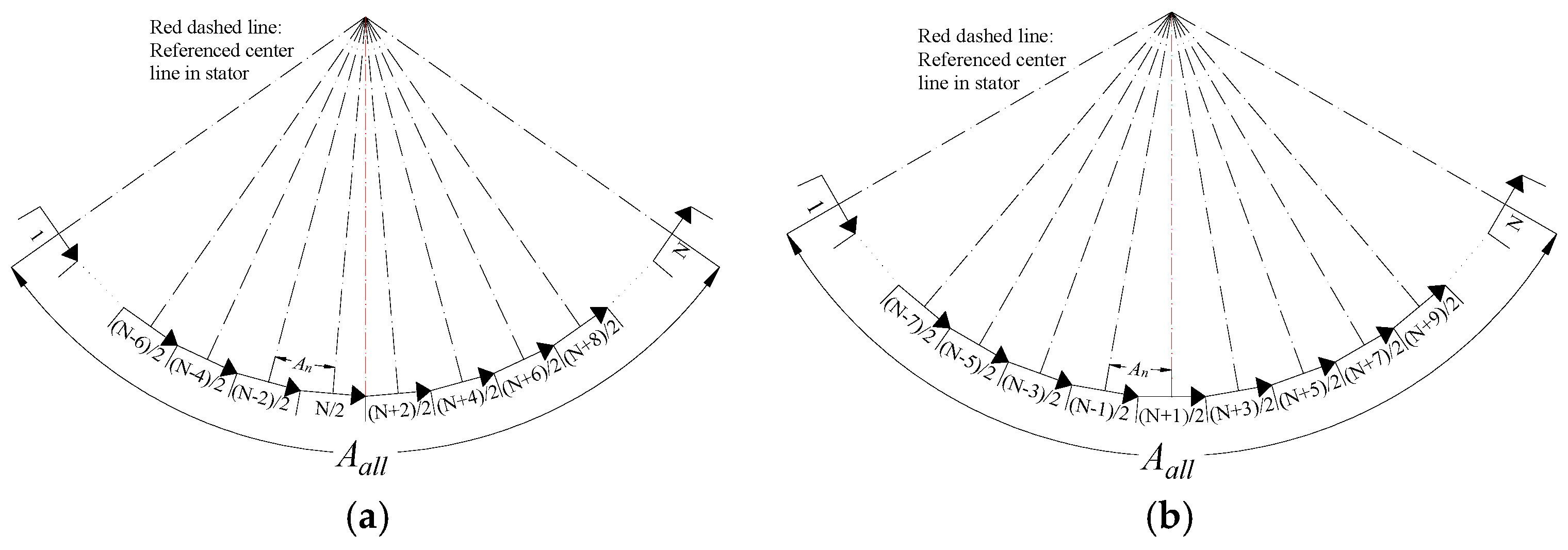
Section 3, cogging torque model is established and characteristics of torque ripple are analyzed. In
Section 4, influence of period ratio of cogging torque to back EMF on the rotor step skewing is investigated. In
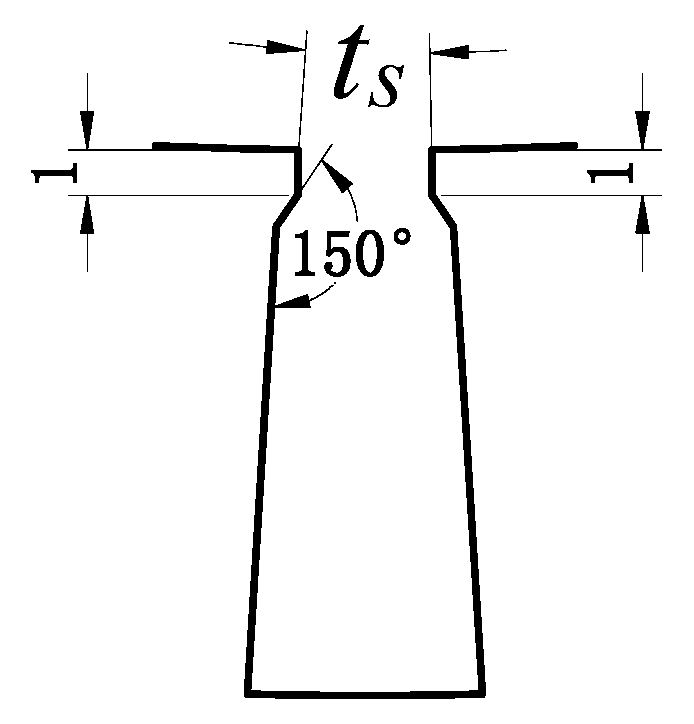
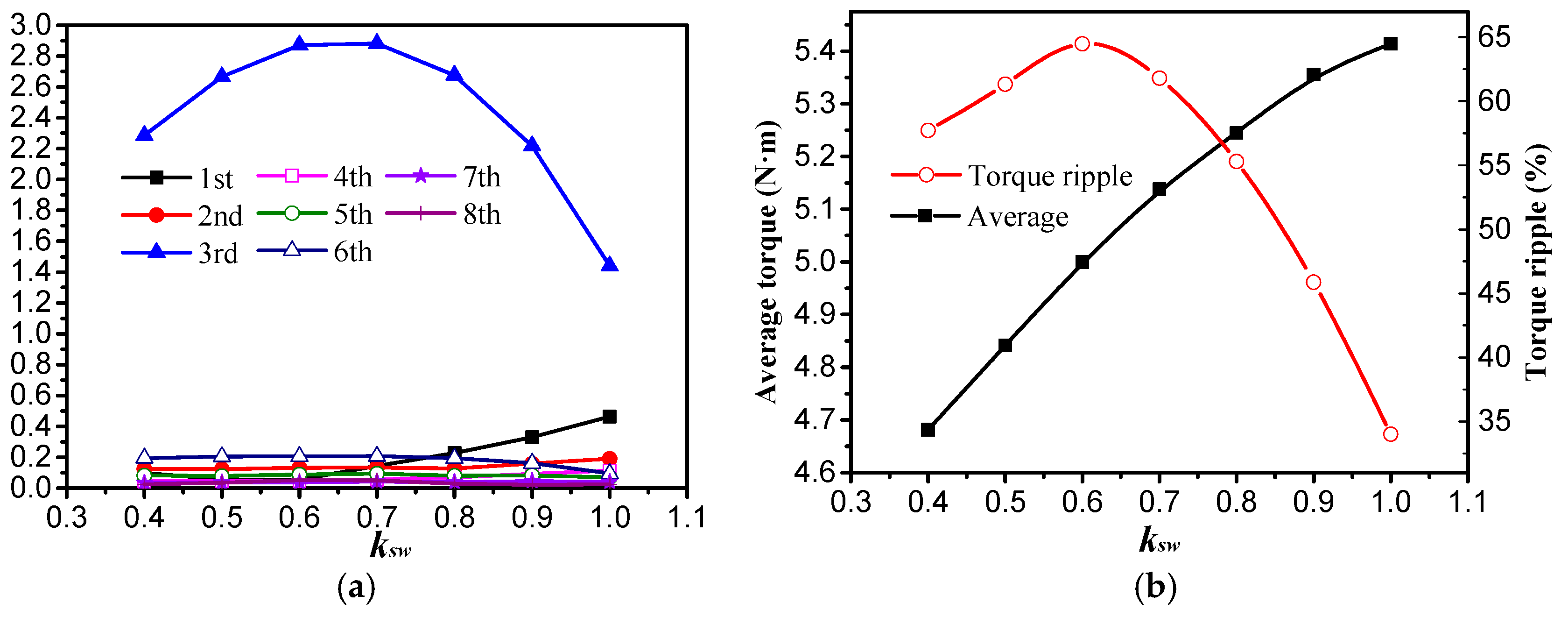
Section 5, in order to increase the period ratio of cogging torque to back EMF, first harmonic and second harmonic of cogging torque are dramatically reduced by the optimization of rotor tooth width and stator slot open width. In
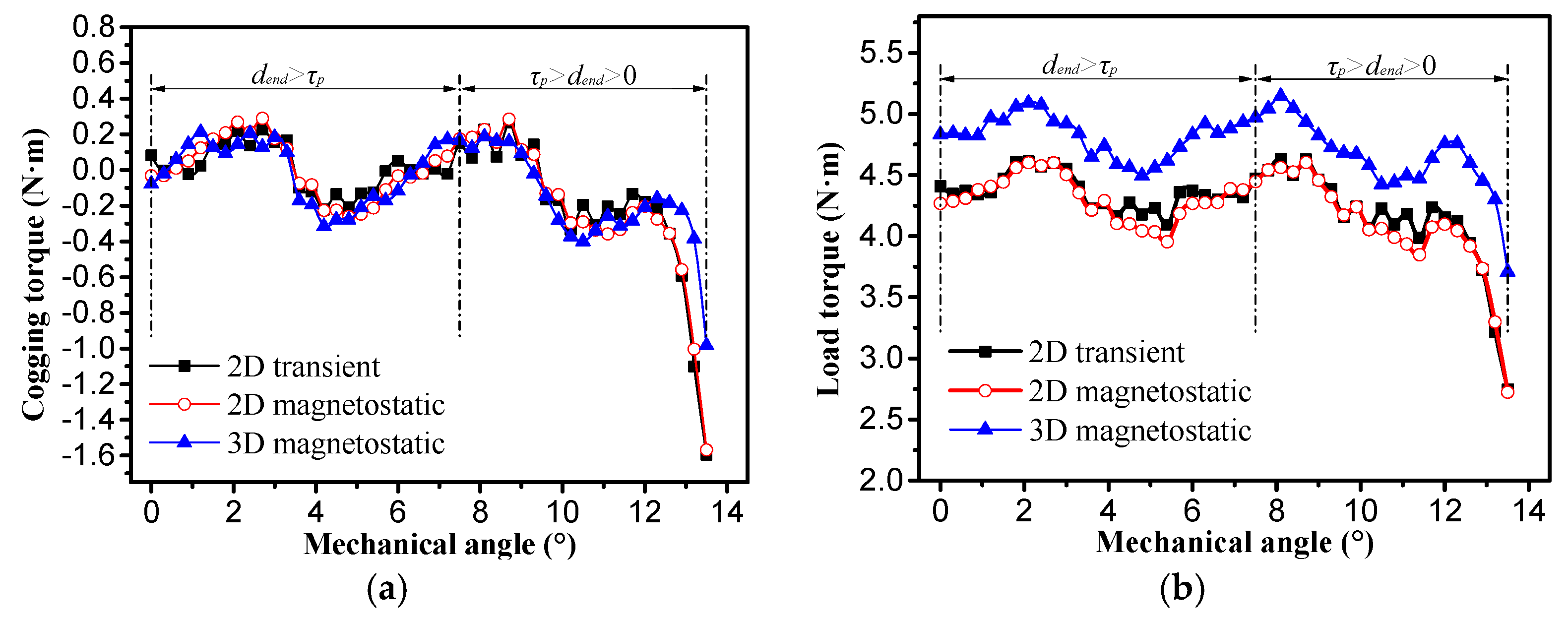
Section 6, 3D finite element method (FEM) model is established to verify the 2D results.
7. Conclusions
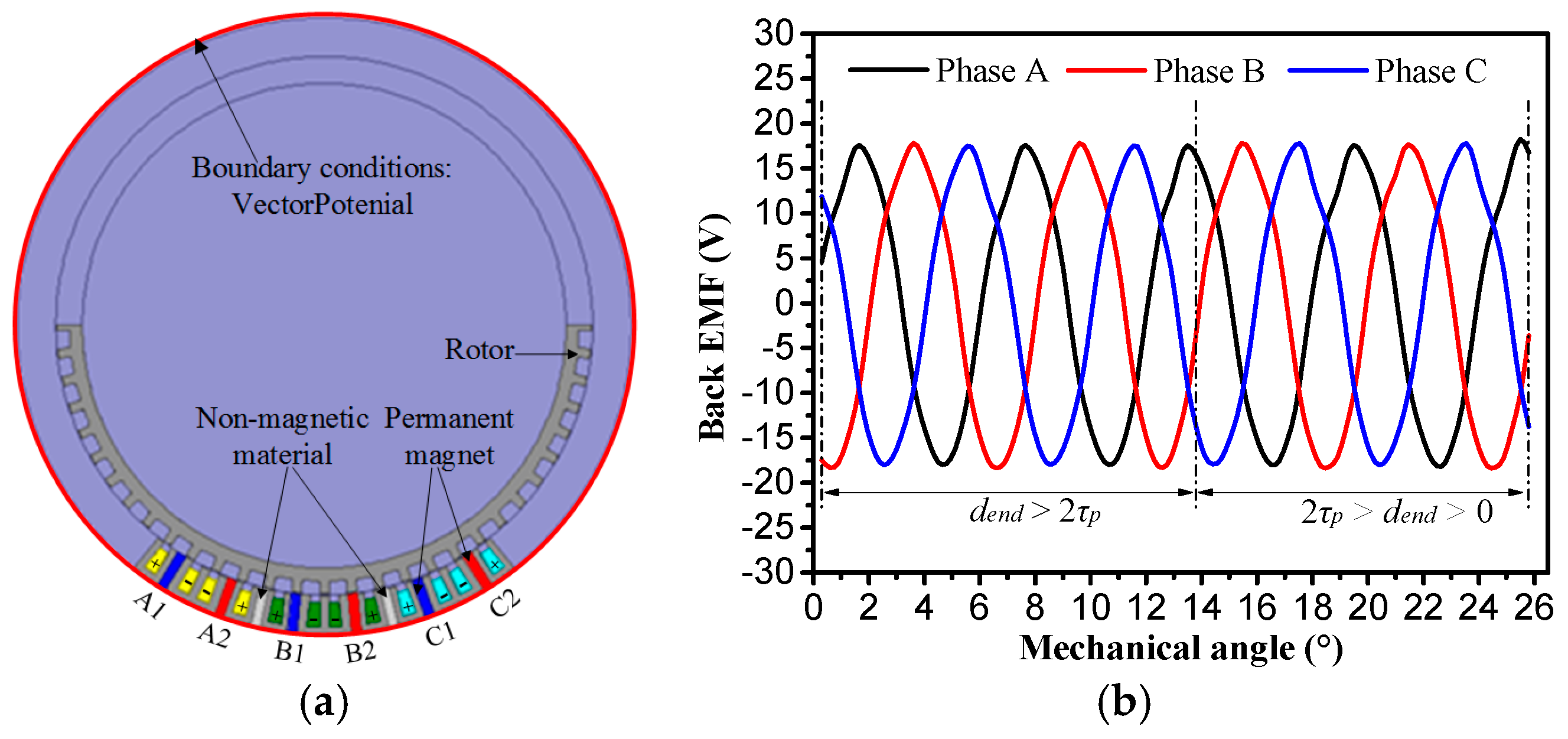
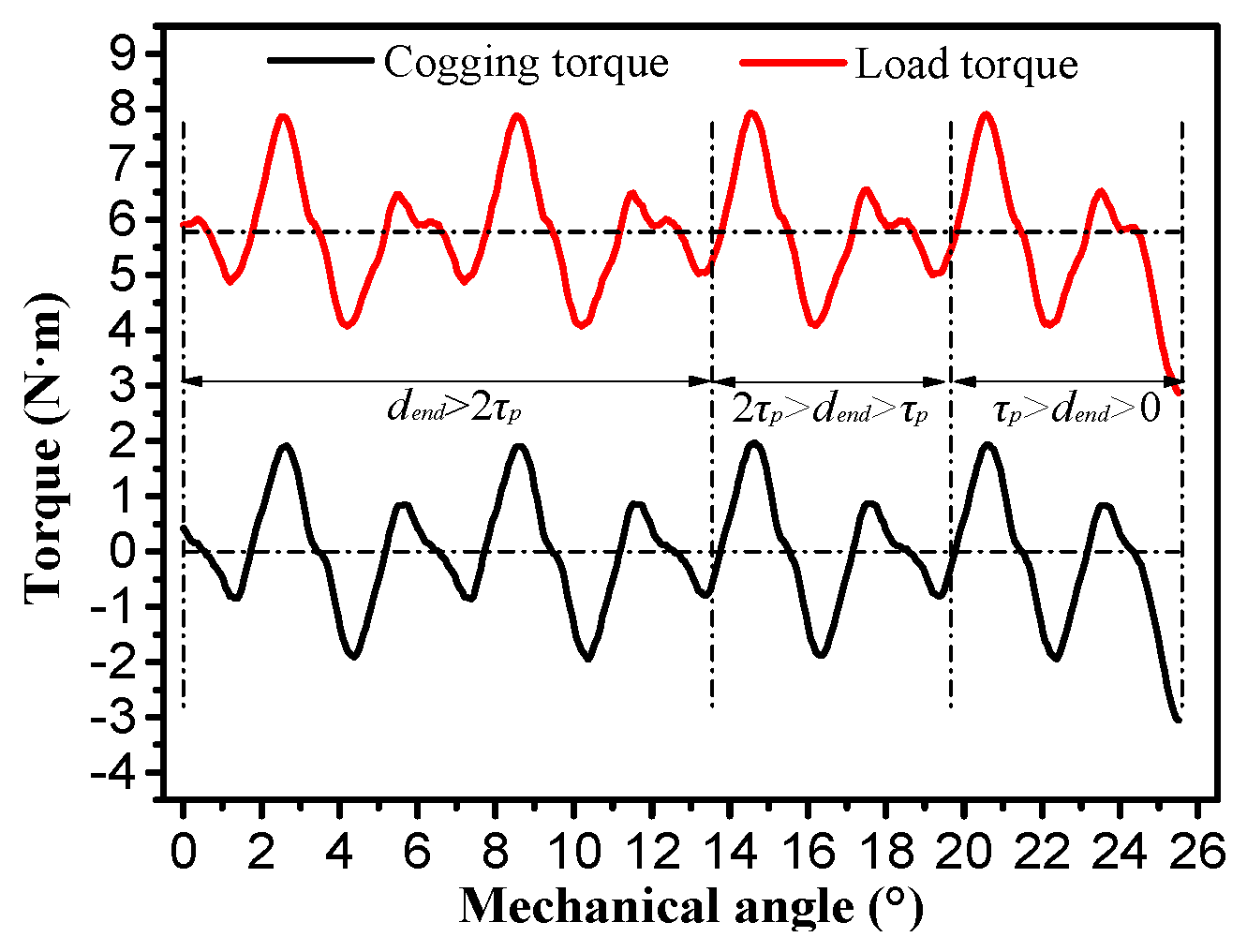
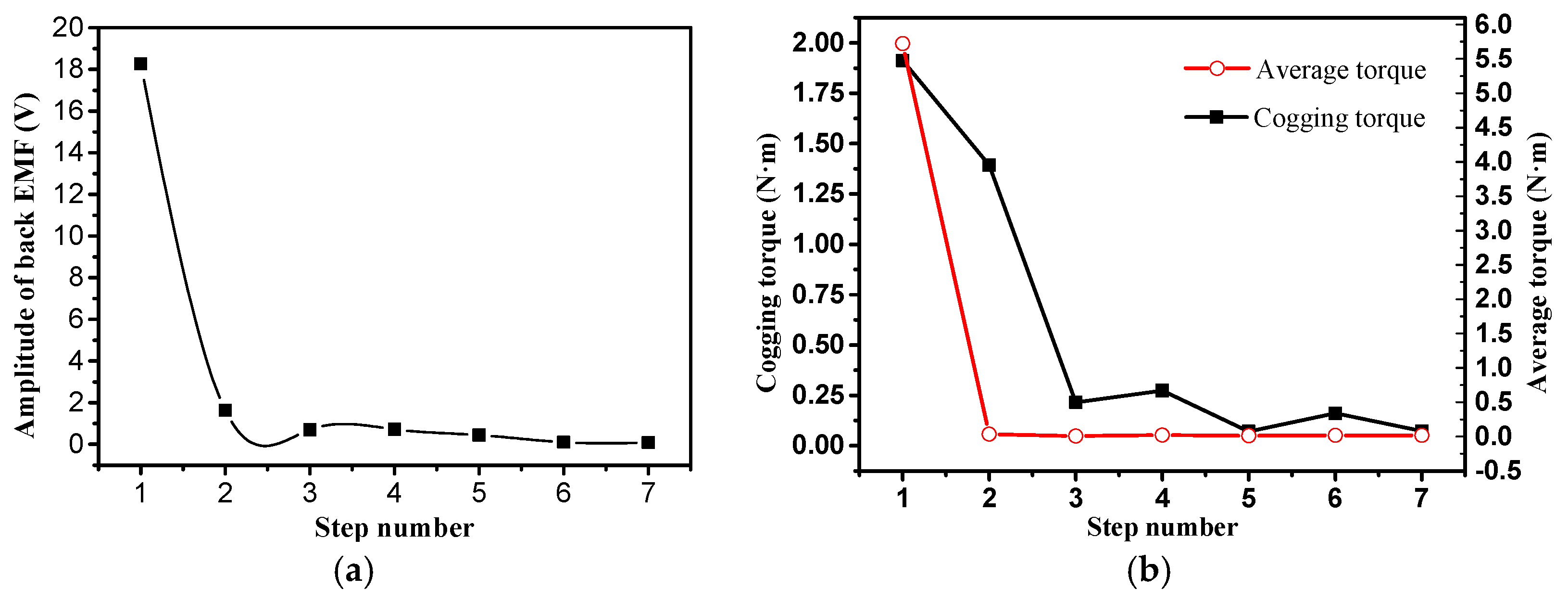
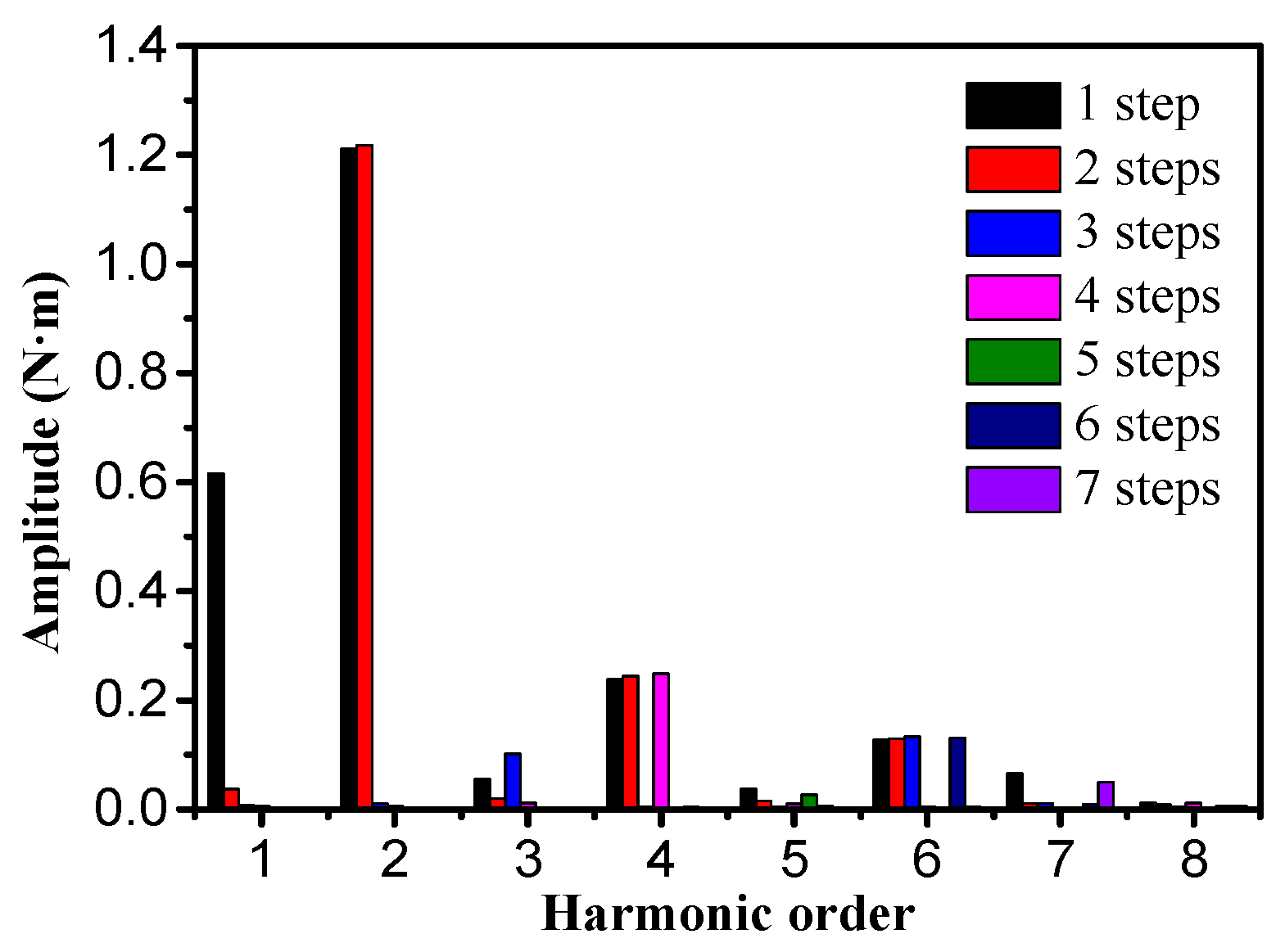
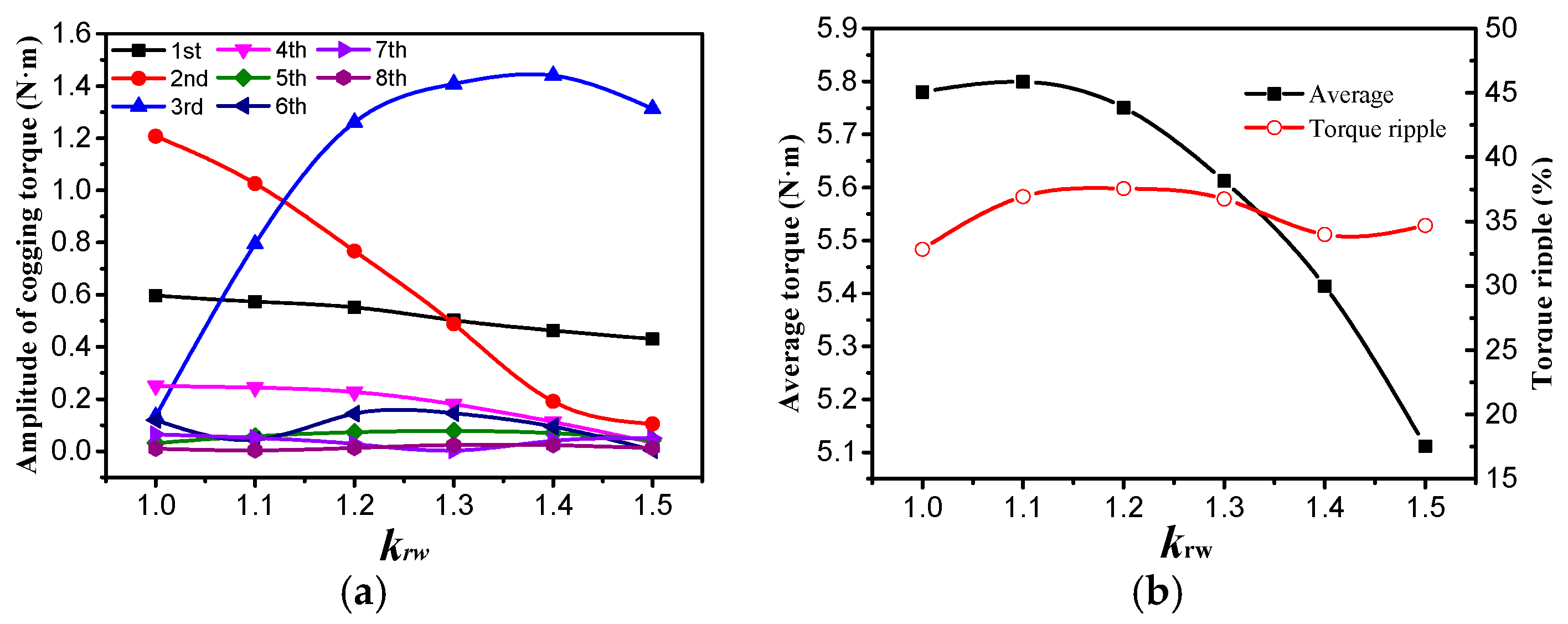
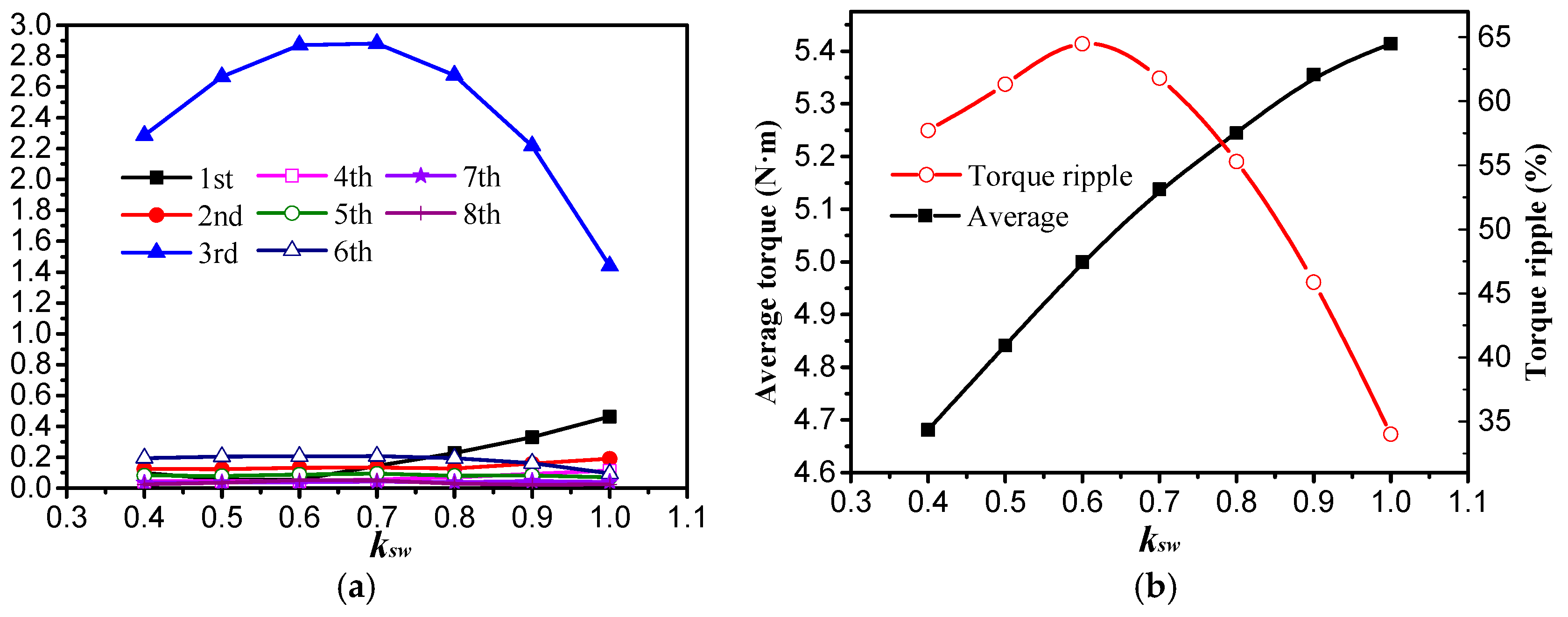
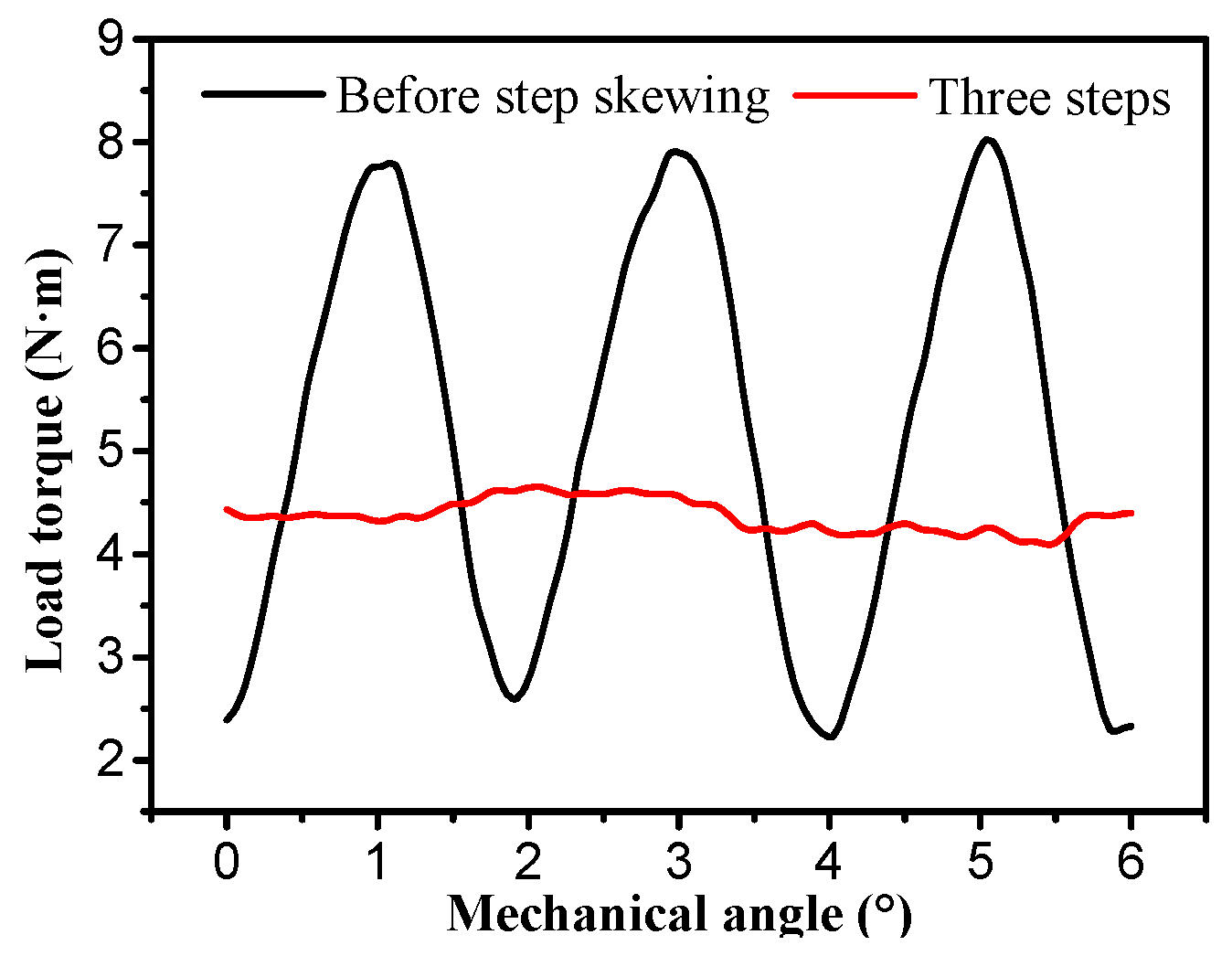
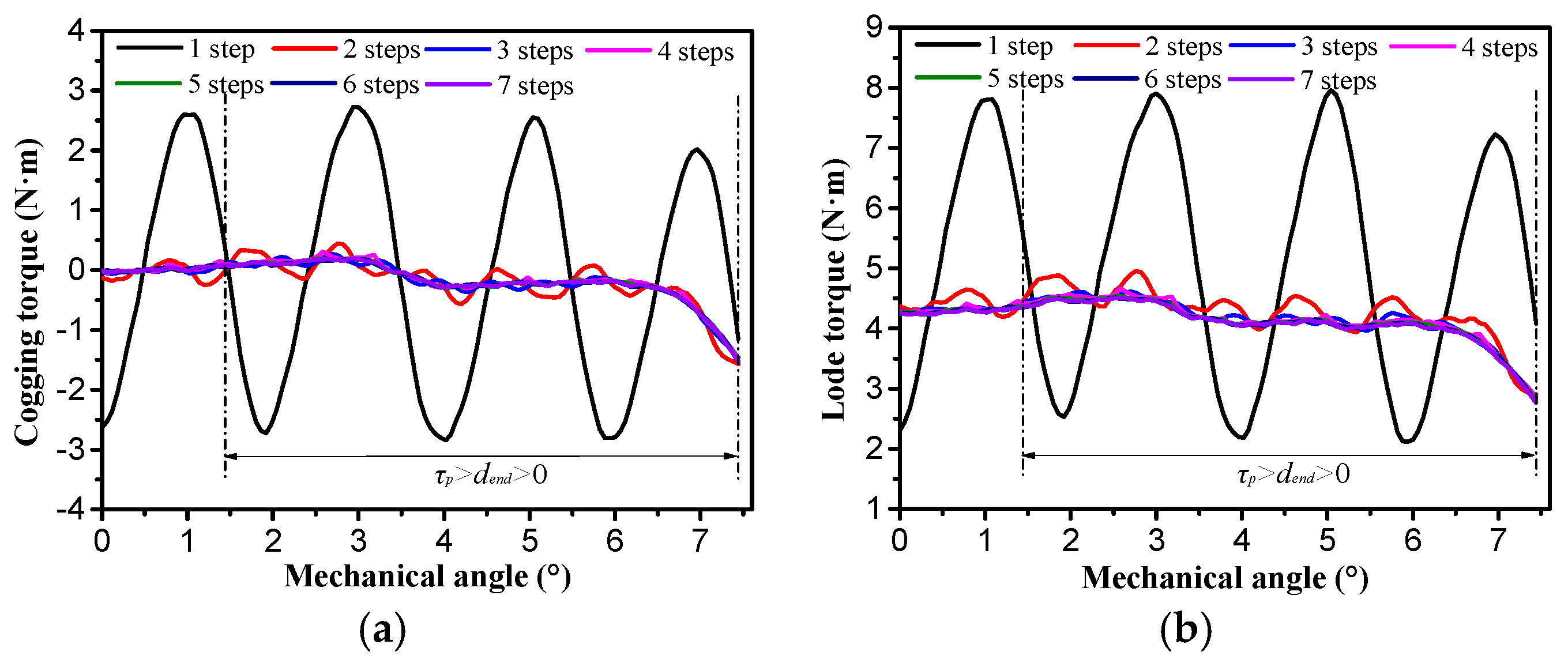
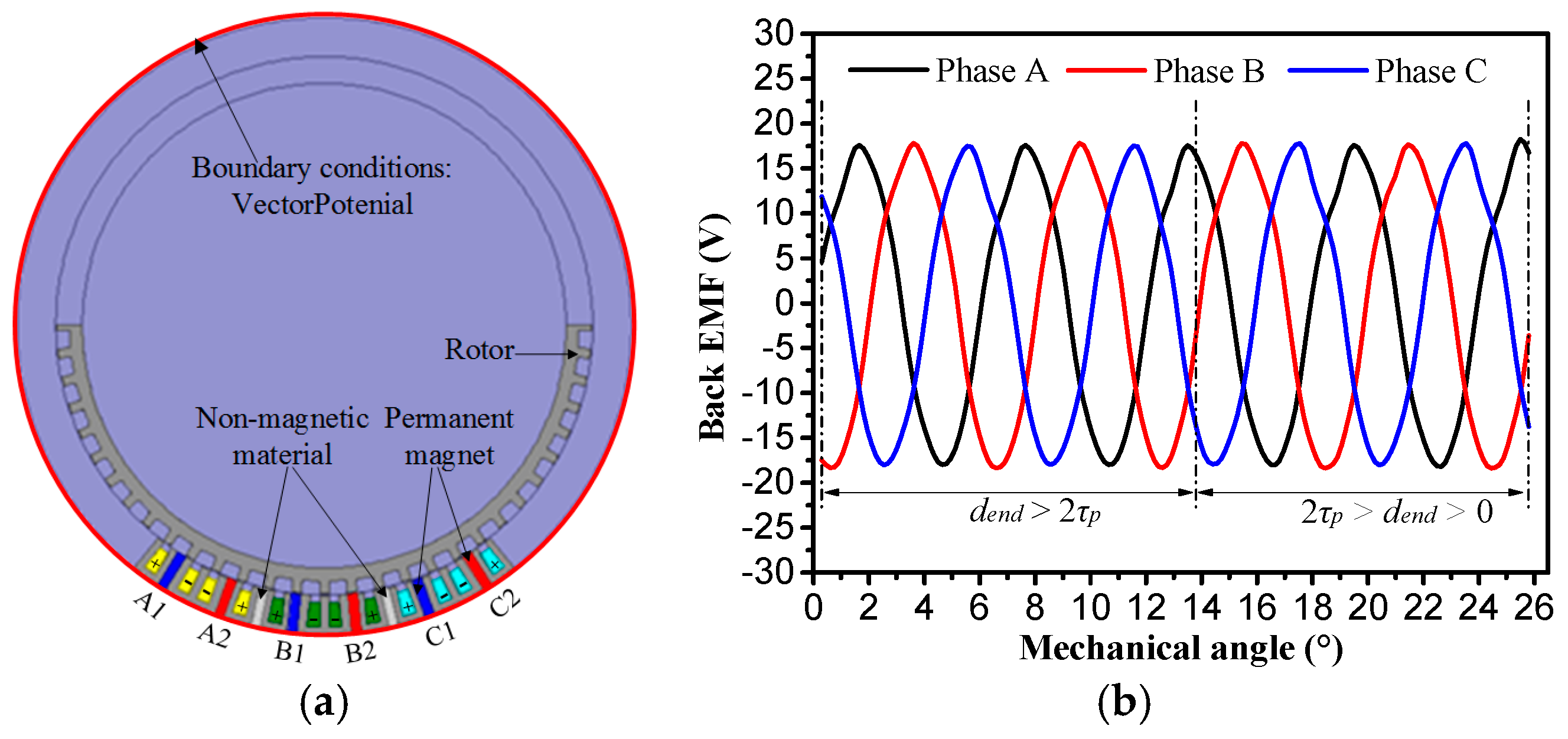
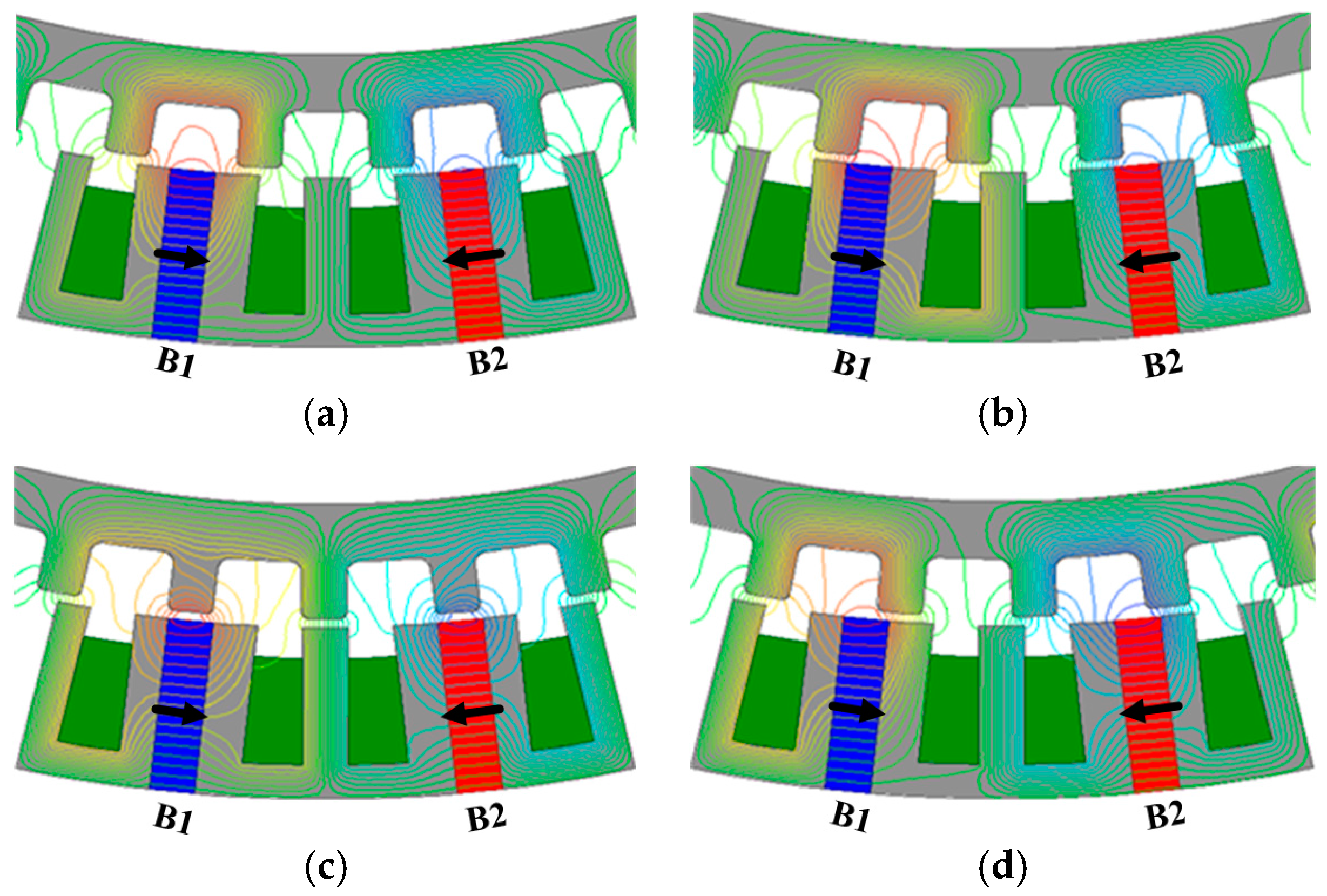
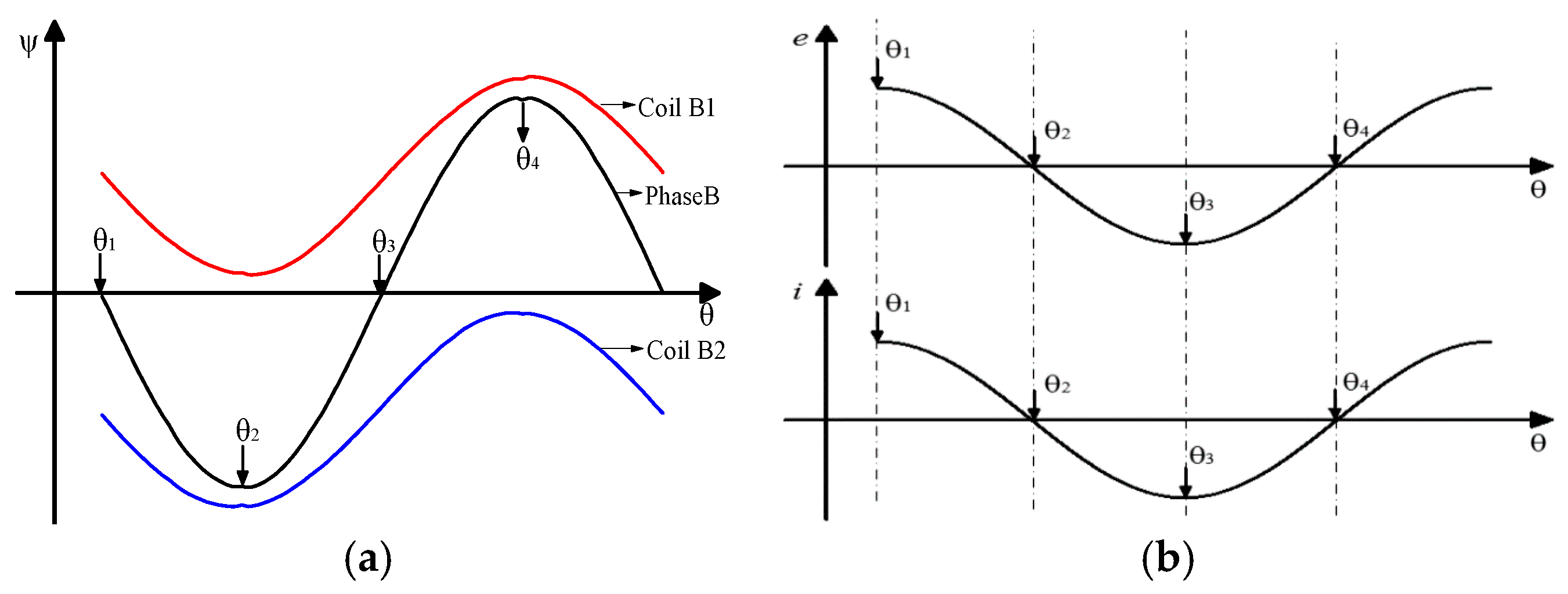
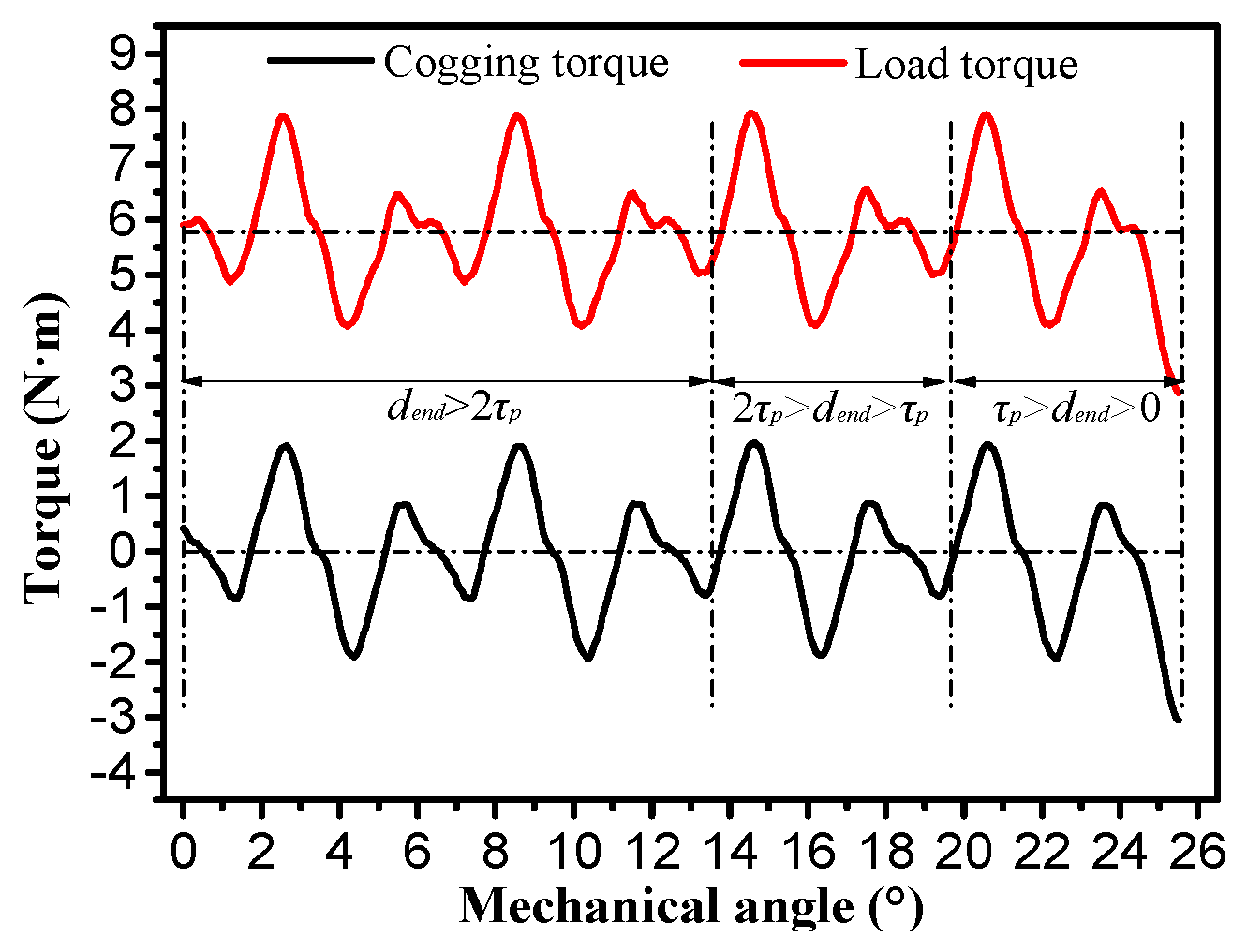
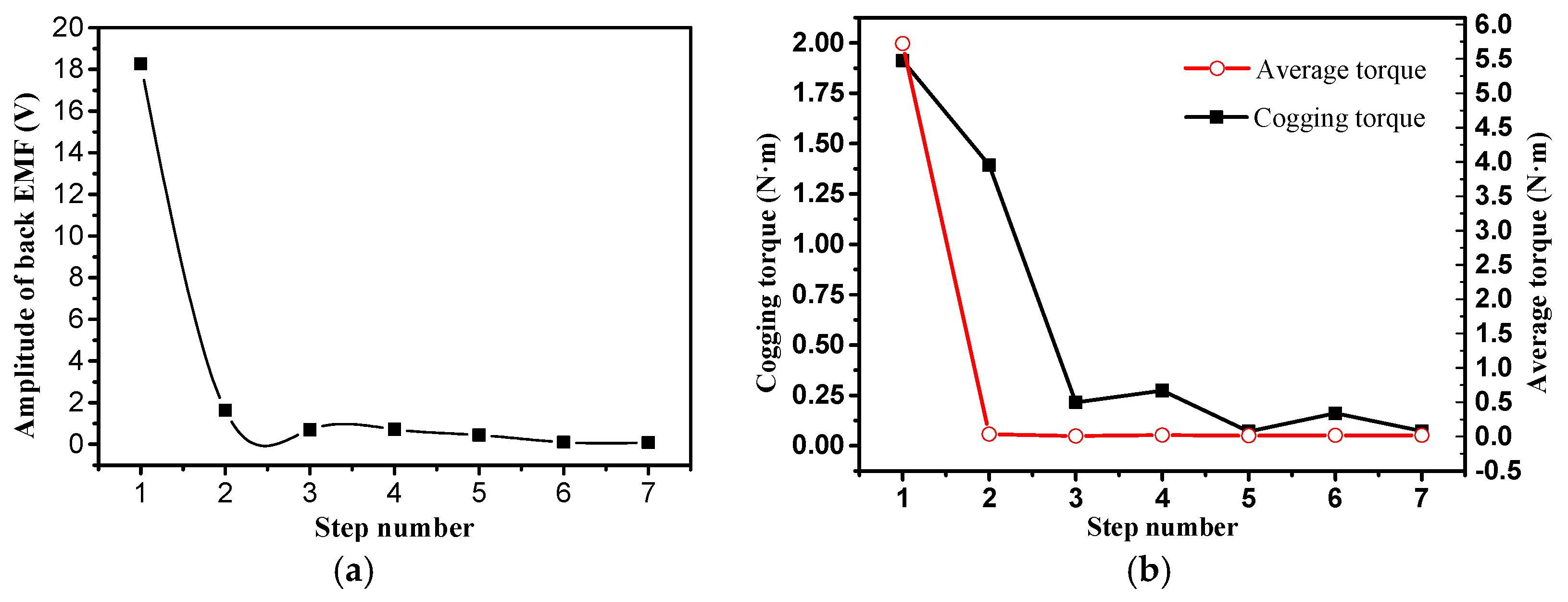
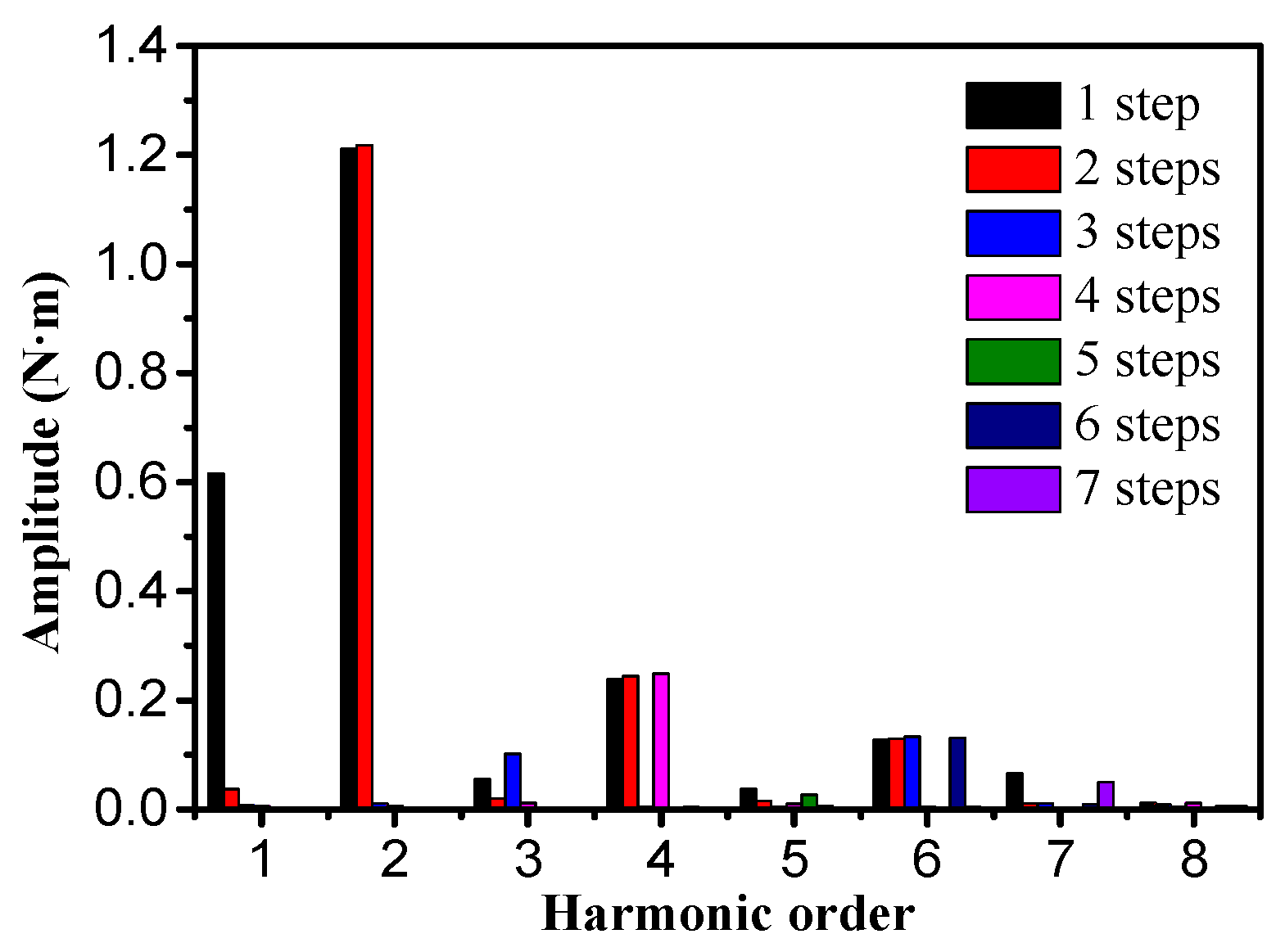
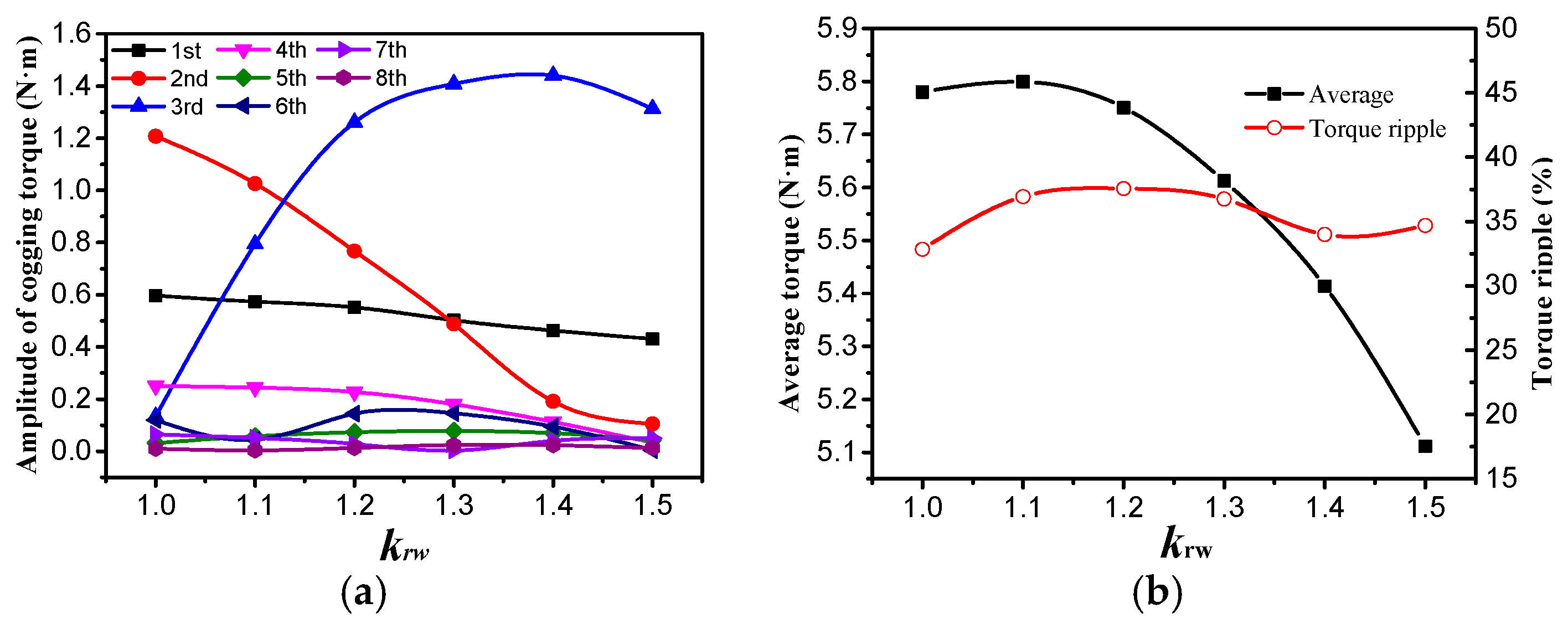
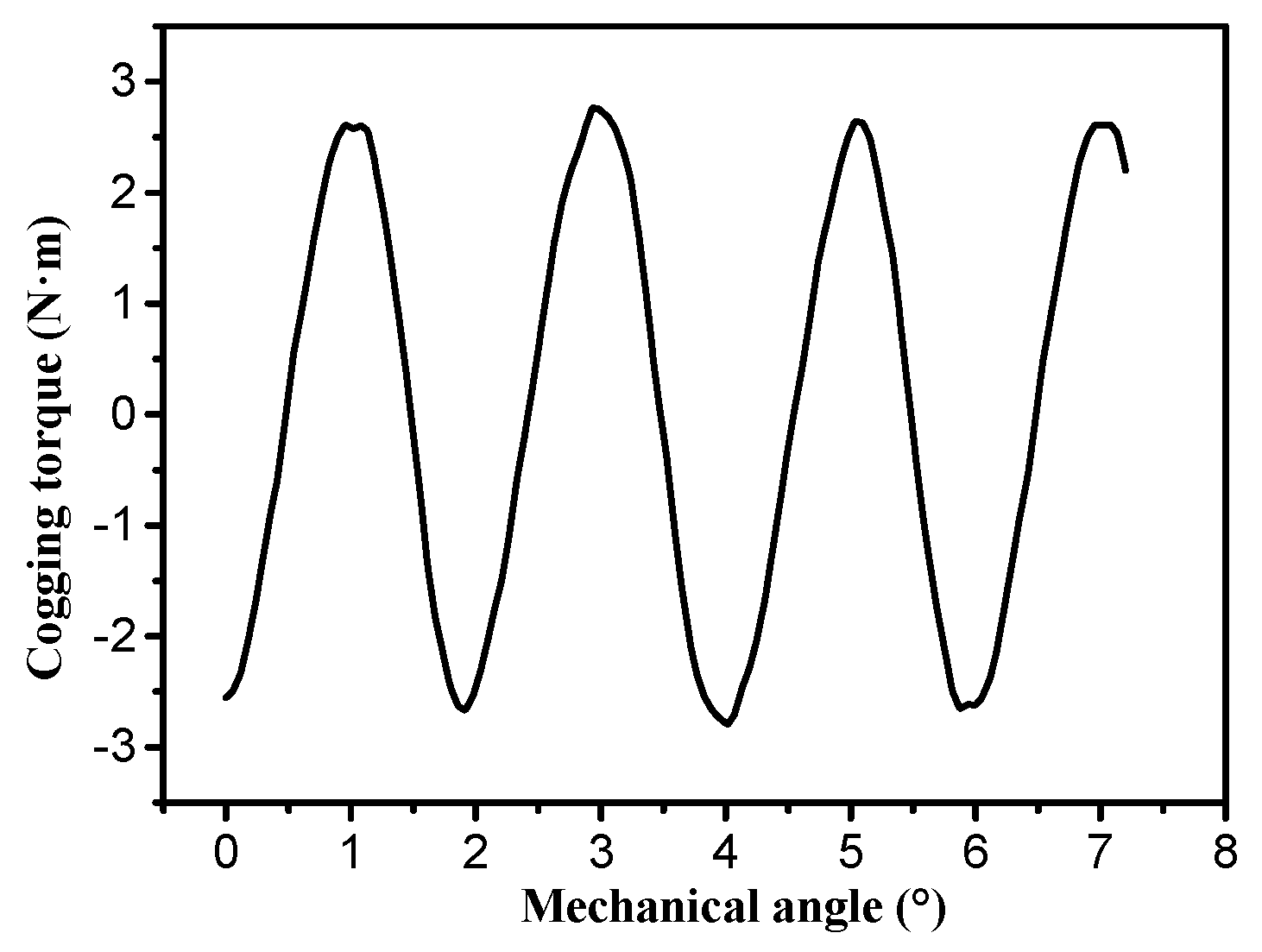
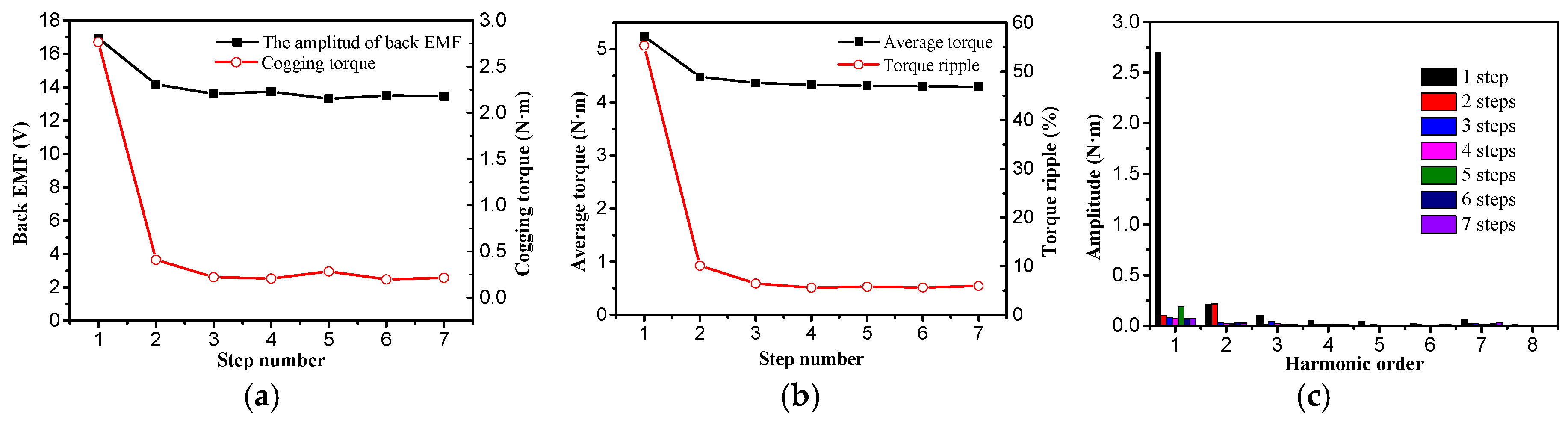
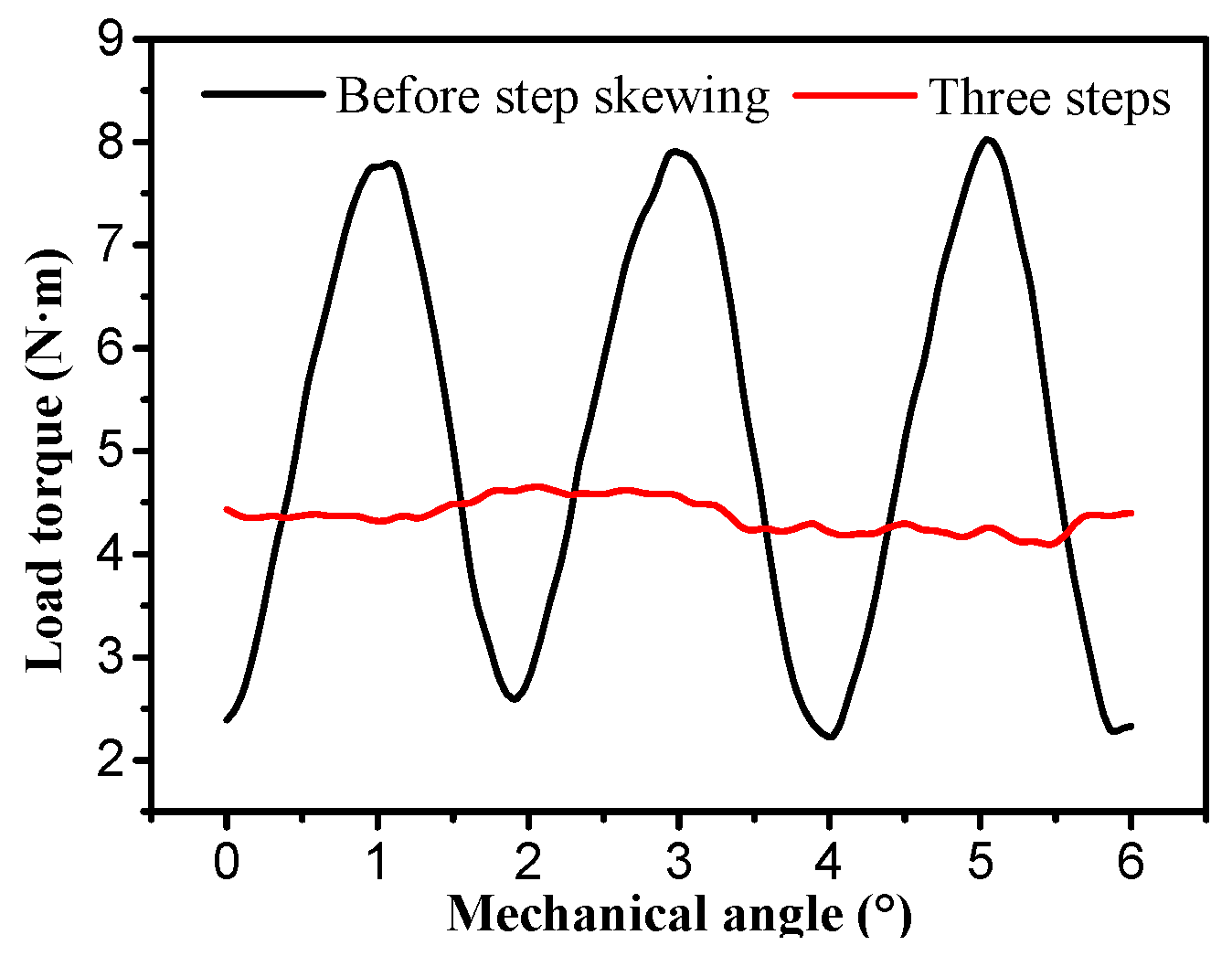
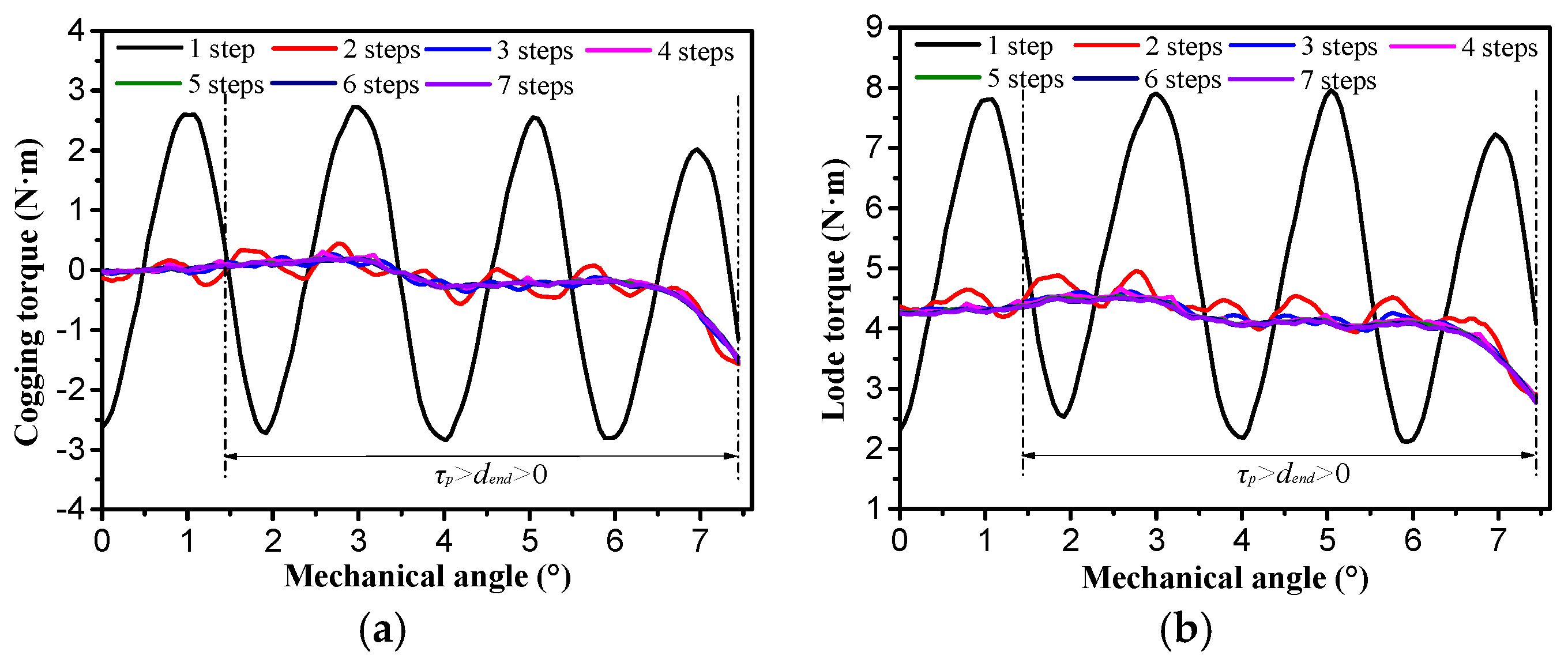
A novel modular AML-FSPM used for scanning system instead of reduction gearboxes and kinematic mechanisms is researched in this paper. Structure of the AML-FSPM is introduced and back EMF of the AML-FSPM is well balanced. Cogging toque model of the AML-FSPM is established based on end torque and slot torque. Furthermore, slot torque can be expressed by the sum of each stator module. Both the period of end torque and the period of slot torque are just one rotor tooth pitch of 6° (mechanical angle), which is the same as the period of the back EMF. Therefore, period ratio of cogging torque to the back EMF equals one. The characteristics of the cogging torque and torque ripple are investigated for both dend > 2τp and dend < 2τp. It shows that peak- peak cogging torque of dend < τp is bigger than that of dend > τp. Furthermore, the torque ripple is mainly caused by the cogging torque. The first harmonic, second harmonic, fourth harmonic and sixth harmonic are main components in the cogging torque. In order to reduce the cogging torque as much as possible and affect the back EMF as little as possible, influence of period ratio of cogging torque to the back EMF is investigated. It shows that bigger value of t is better. Therefore, rotor tooth width and stator slot open width are optimized to enhance third harmonic and restrain first and second harmonic. After optimization of rotor tooth width and slot open width, period ratio of cogging torque to back EMF is increased from 1 to 3. Then, step rotor skewing is adopted to reduce torque ripple. After the rotor three-step skewing, torque ripple is decreased from 32.9% to 6.4%, by 79.8%, for dend > τp, torque ripple is decreased from 45.1% to 22.7%, by 49.7%, for dend < τp when scanning rang is kept unchanged, and torque ripple will be within 6.4% during whole operation if left scanning range (θL) and right scanning range (θR) are reduced by 2°. Finally, the result obtained by 2D FEM is validated by 3D FEM.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}