
A Multi-Period Framework for Coordinated Dispatch of Plug-in Electric Vehicles

Abstract
:1. Introduction
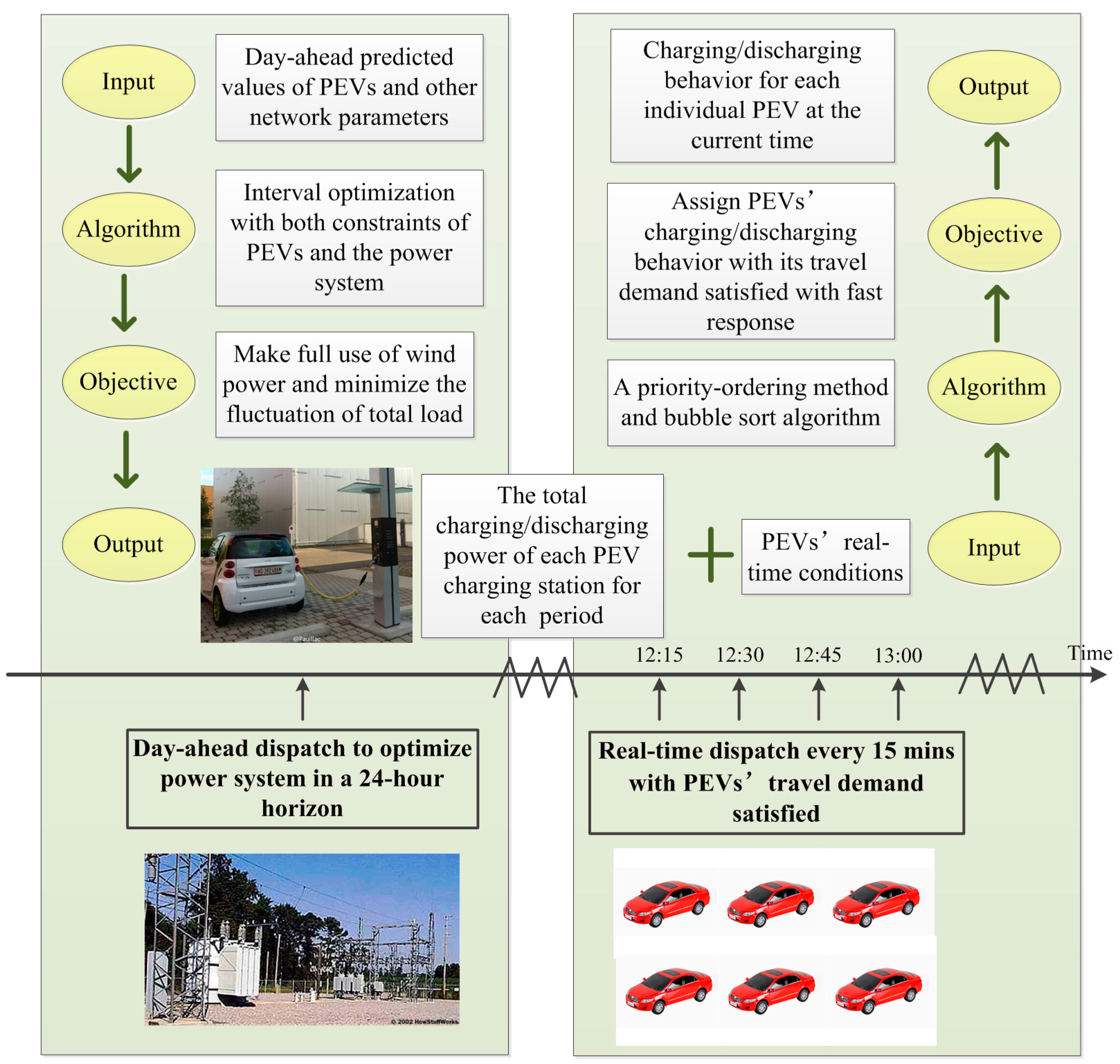
- An integrated framework for multi-period PEV dispatch which pursues a win-win result for both the power system and PEV owners is proposed.
- Interval optimization is adopted in the day-ahead dispatch.
- A PEV-clustered model and a priority-ordering method are proposed to support the multi-period PEV dispatch.
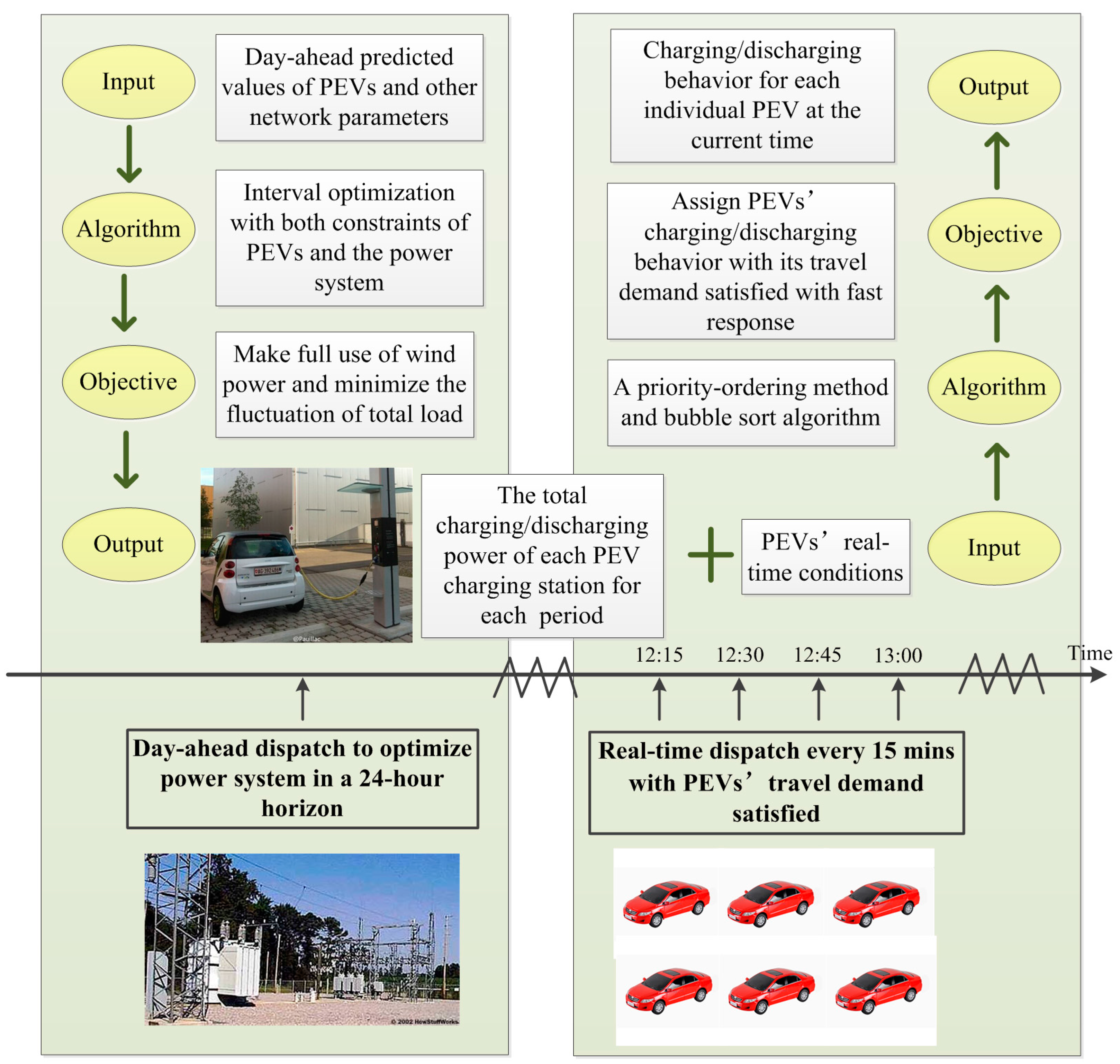
2. The Proposed Multi-Period Dispatch Framework
3. Problem Formulations
3.1. The Day-Ahead Plug-In Electric Vehicles Model
3.2. The PEV-Clustered Model
3.3. The Day-Ahead Dispatch Model
- (1)
- Power flow equality constraints:where Pjk,t and Qjk,t represent the active and reactive power intervals of branch jk at time t, respectively. Vj,t and Vk,t represent the voltage magnitude intervals of bus j and k at time t. Gjk and Bjk are the real part and imaginary part of the nodal admittance matrix. θjk,t is the phase angle deviation interval of branch jk.
- (2)
- Apparent power constrains for distribution lines:where Pjkmax is the maximum power value interval of branch jk.
- (3)
- Bus voltage constraints:where Vjmin and Vjmax are the minimum and maximum voltage magnitude intervals at bus j, respectively.
- (4)
- Charging/discharging power constraints for PEVs:where pch,t and pdch,t are charging and discharging power of individual PEVs at time t. pchmax and pdchmax are their maximum values. ξch,t and ξdch,t are binary variables for the identification flag of PEVs’ charging and discharging state at time t. For example, ξch,t = 1 represents that it is in a charging state at time t.
- (5)
- Complementary constrains of charging/discharging states:
- (6)
- Charging/discharging quantity equality constraints:where SOCev,t is the state of charge of PEVs at time t. ηch and ηdch are PEVs’ average charging and discharging efficiency, respectively.
- (7)
- Capacity constraints for PEV’s batteries:where SOCevmin and SOCevmax are the minimum and maximum state of charge of PEVs, respectively.
- (8)
- Travel demand constraints:where SOCev,tplug-out is PEVs’ state of charge when they plug out of PEV charging stations.
3.4. The Real-Time Dispatch Model
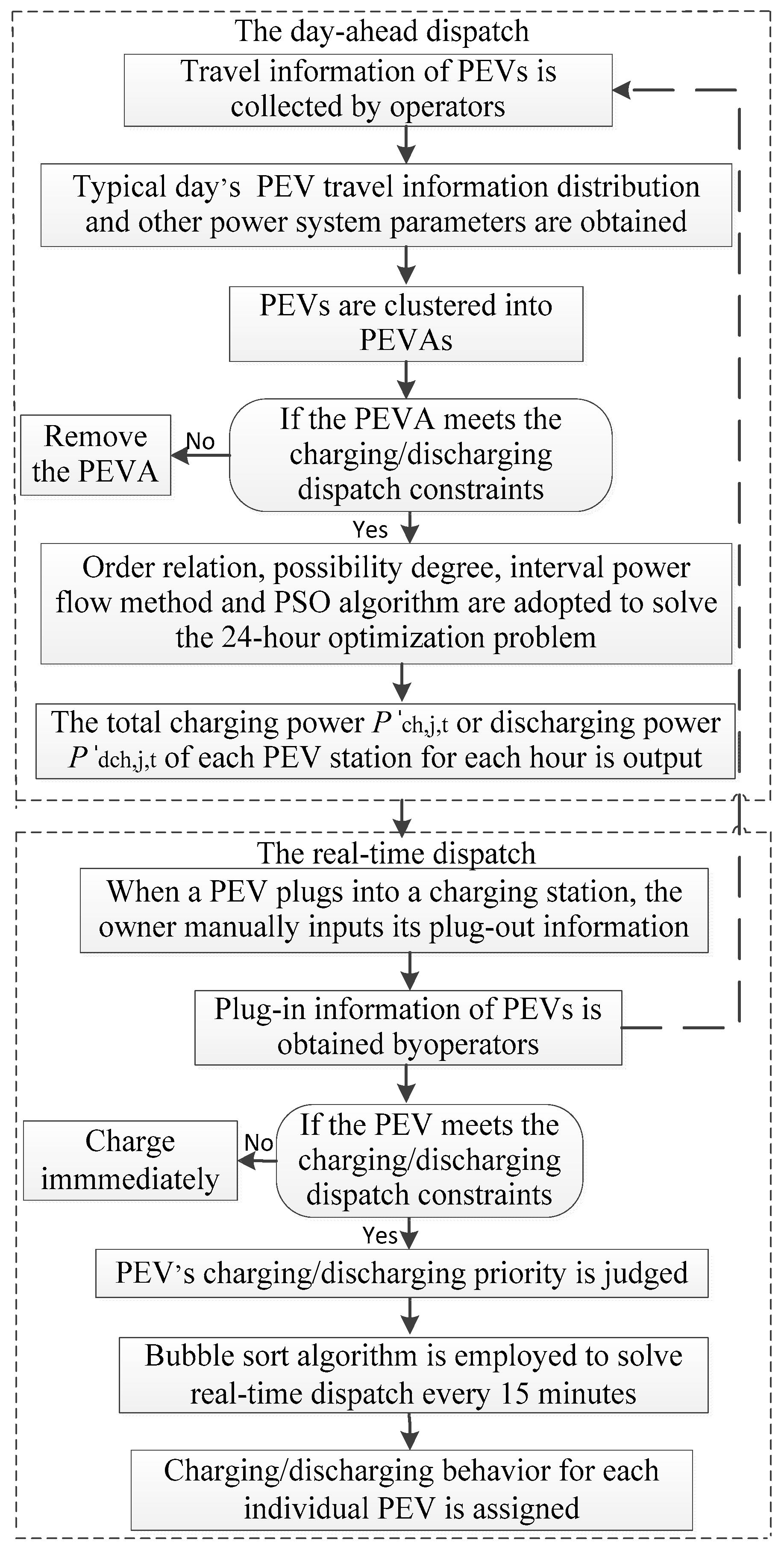
3.5. The Priority-Ordering Method
- The total charging power demand P’ch,j,t or discharging power demand P’dch,j,t of the PEV charging station at the current time is obtained from the day-ahead dispatch;
- scan PEVs connected to the certain charging station at the current time, and cluster them into PEVAs according to their UST;
- if charging power P’ch,j,t is required to achieve the day-ahead plan, set PEVAs to charge at their rated charging power from the one with the lowest level of UST; then, gradually upgrade the UST level, until meeting the requirement of the total charging power P’ch,j,t;
- else, set PEVAs to discharge from the one with the highest level of UST; then, gradually degrade the UST level, until meeting the requirement of the total discharging power P’dch,j,t.
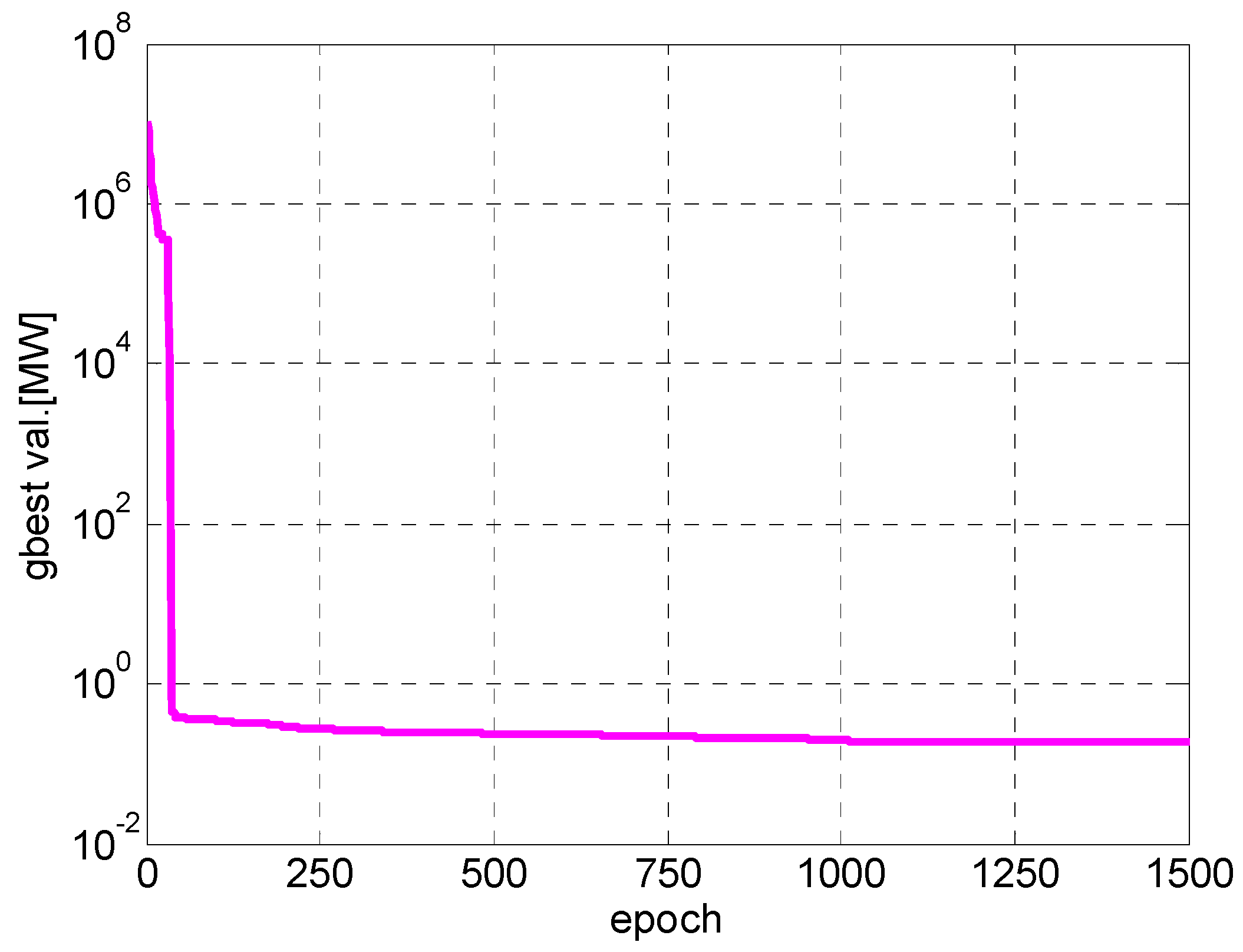
4. Approach for Solving the Proposed Models
5. Case Studies and Discussion
5.1. Case Description
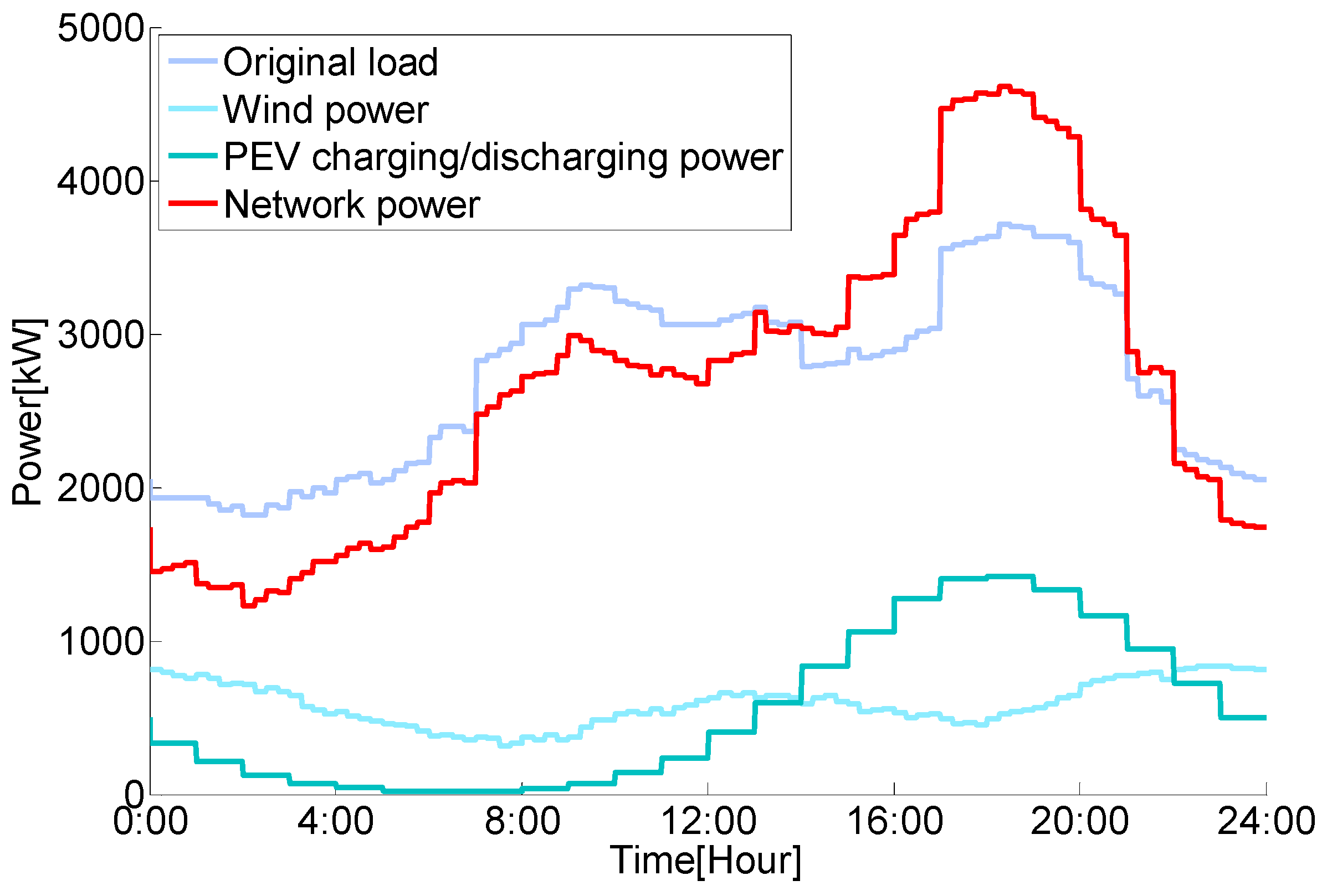
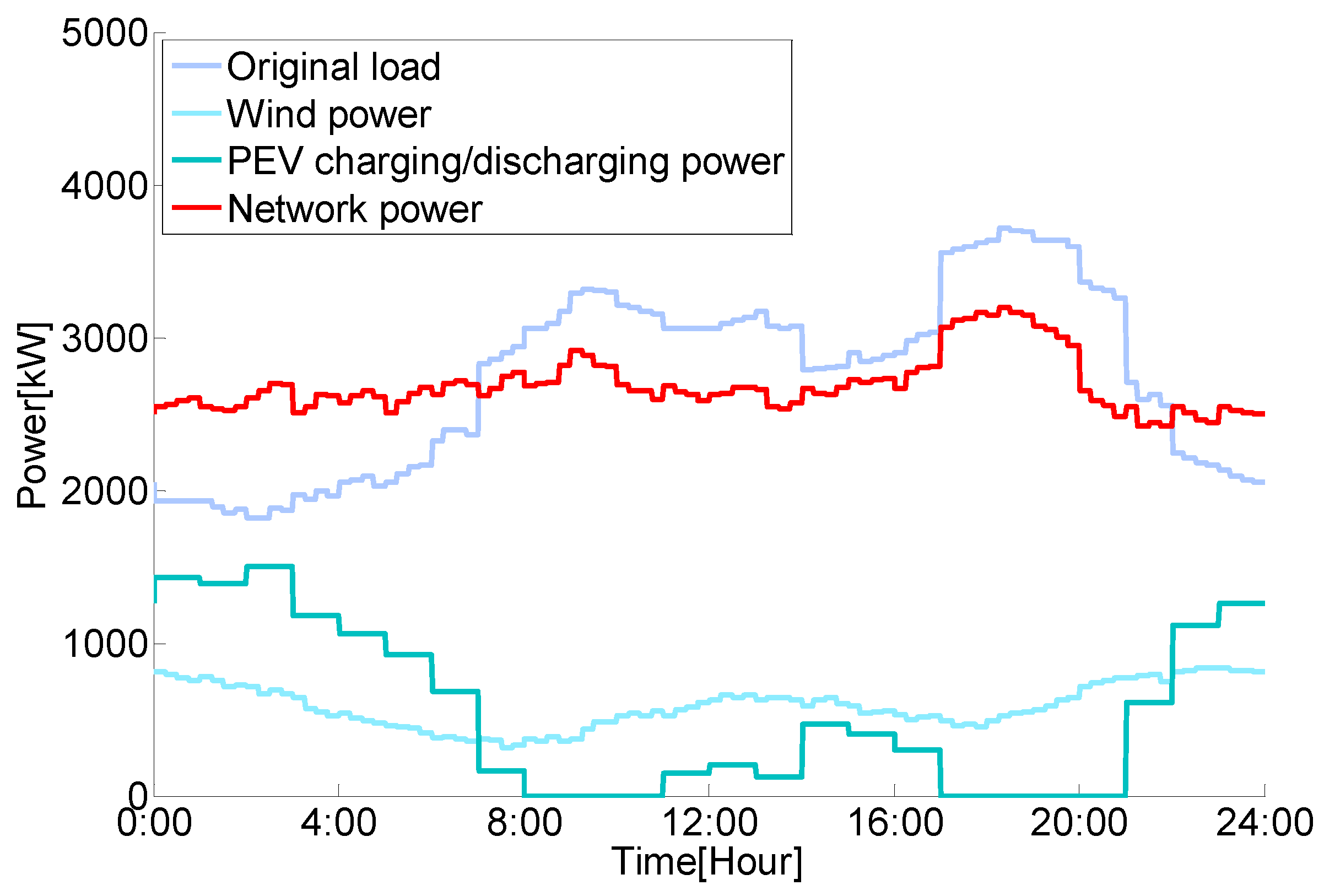
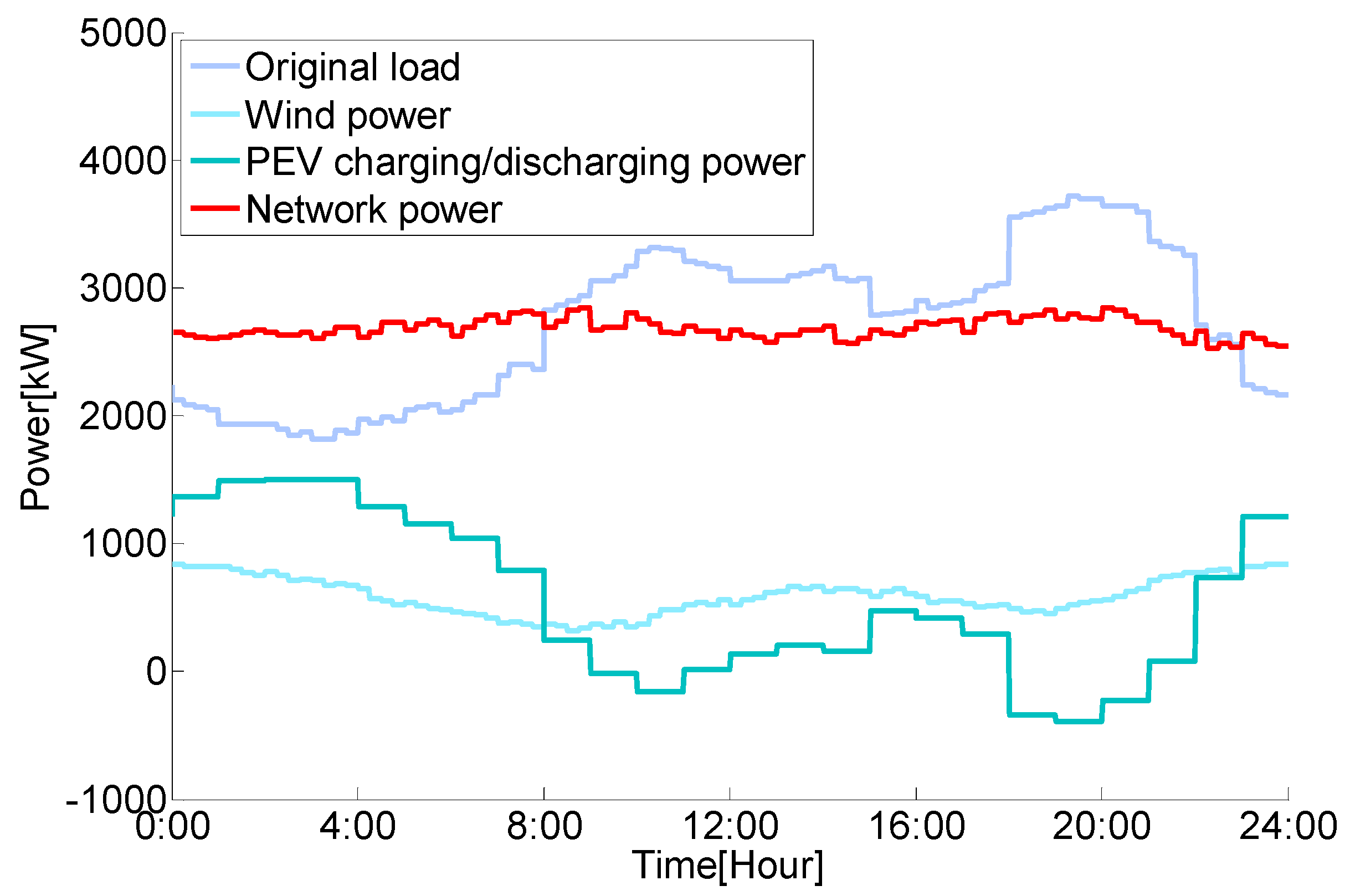
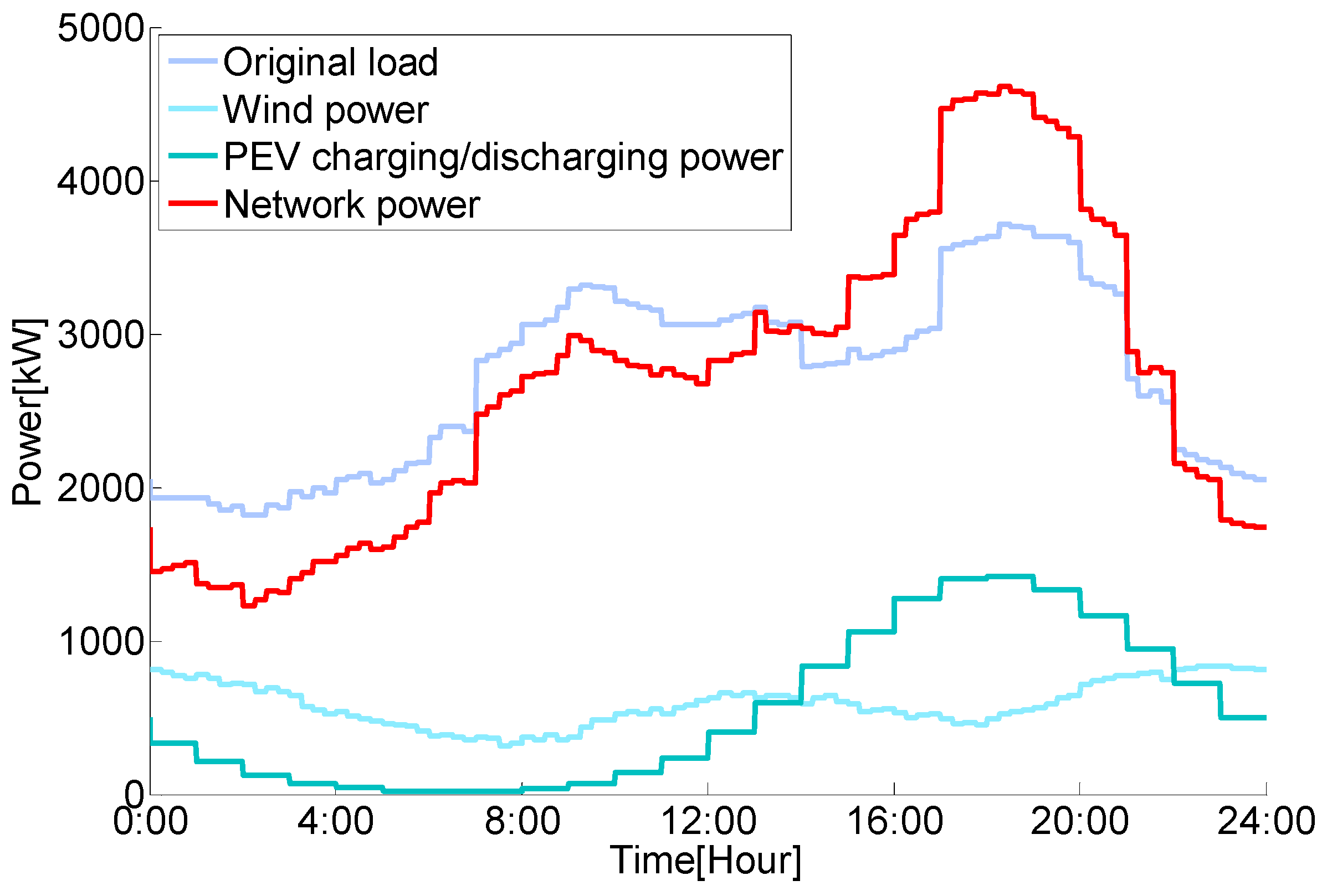
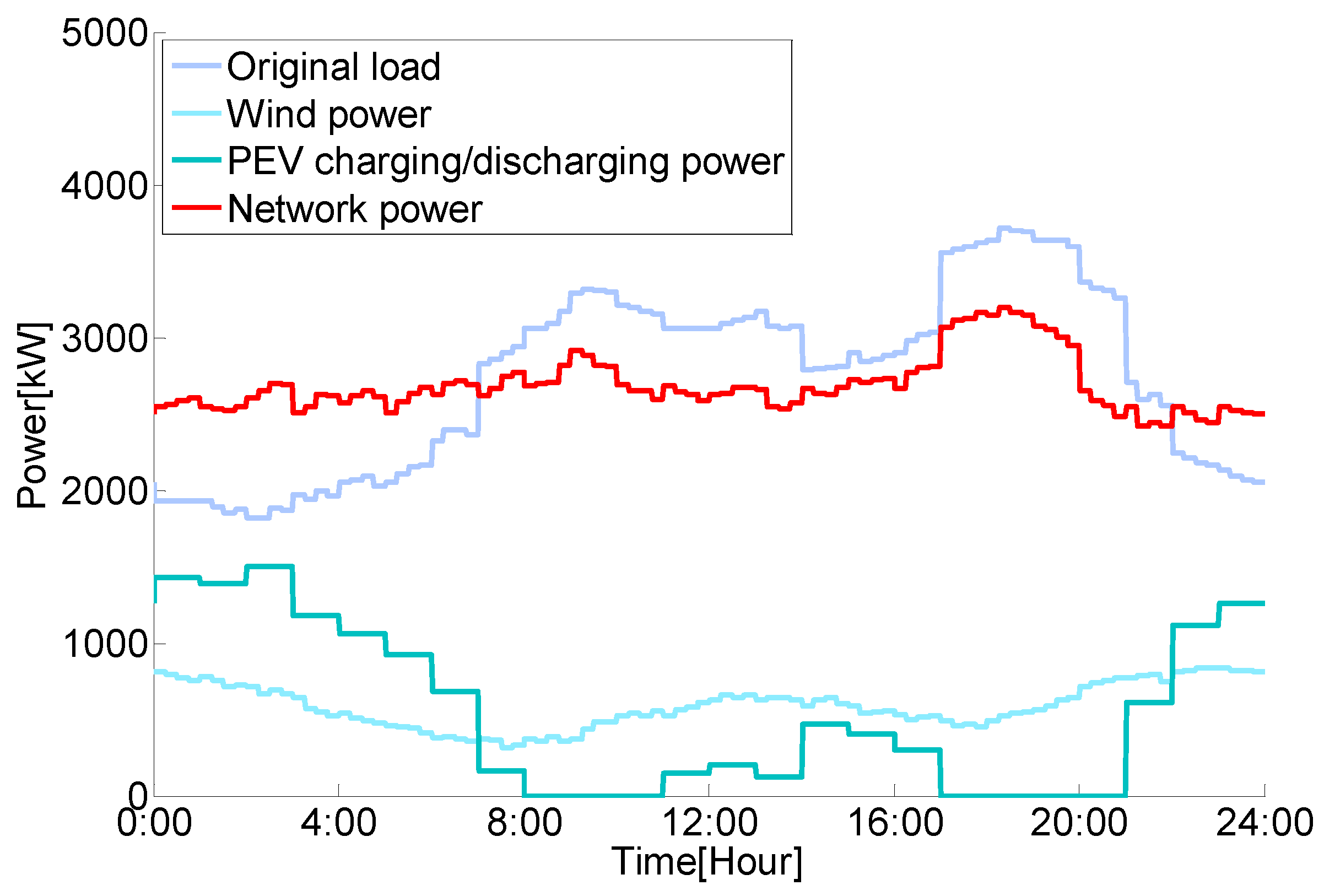
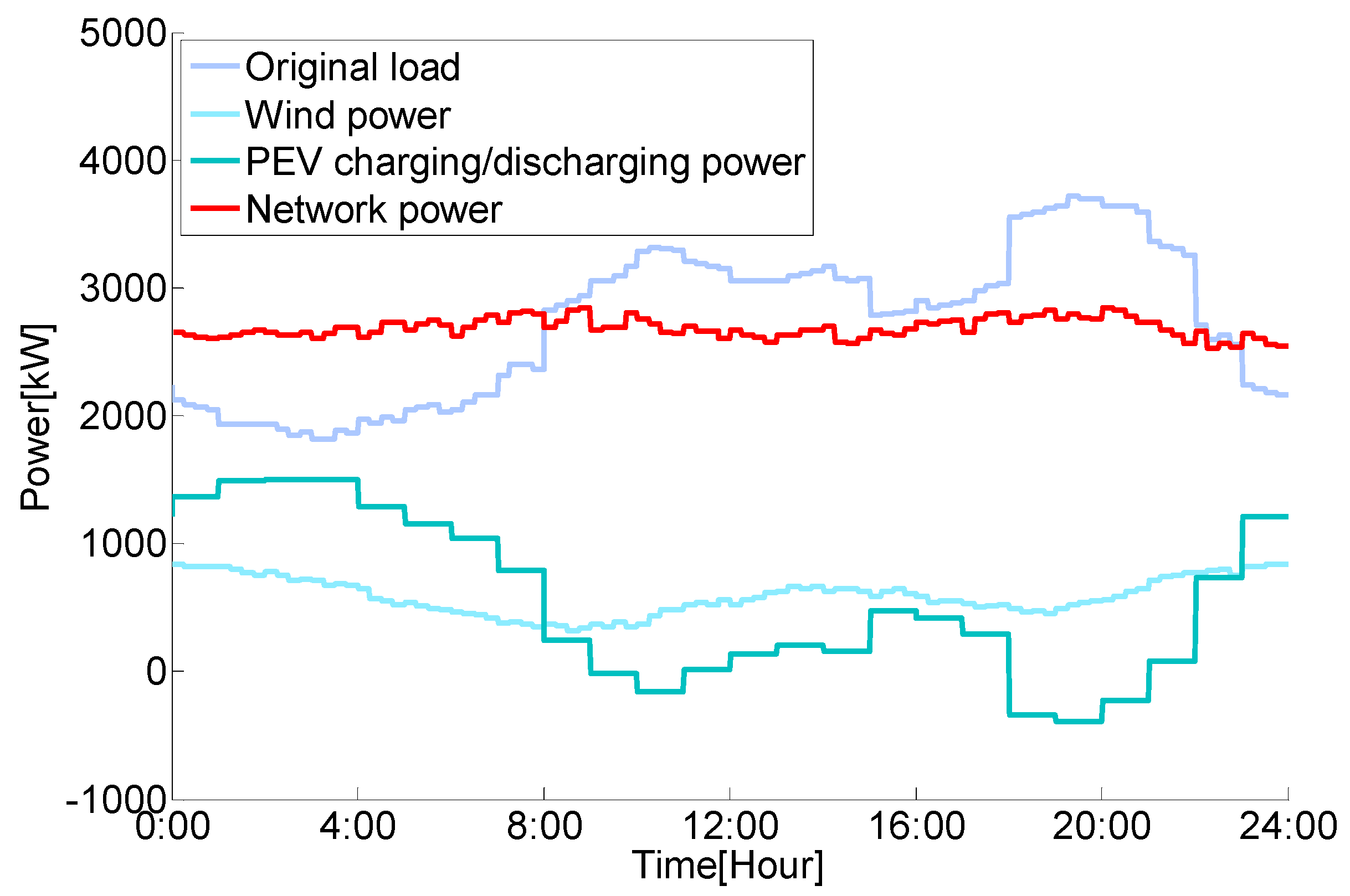
5.2. The Performance of the Multi-Period Dispatch
5.3. Interval Optimization and the Uncertainty Level
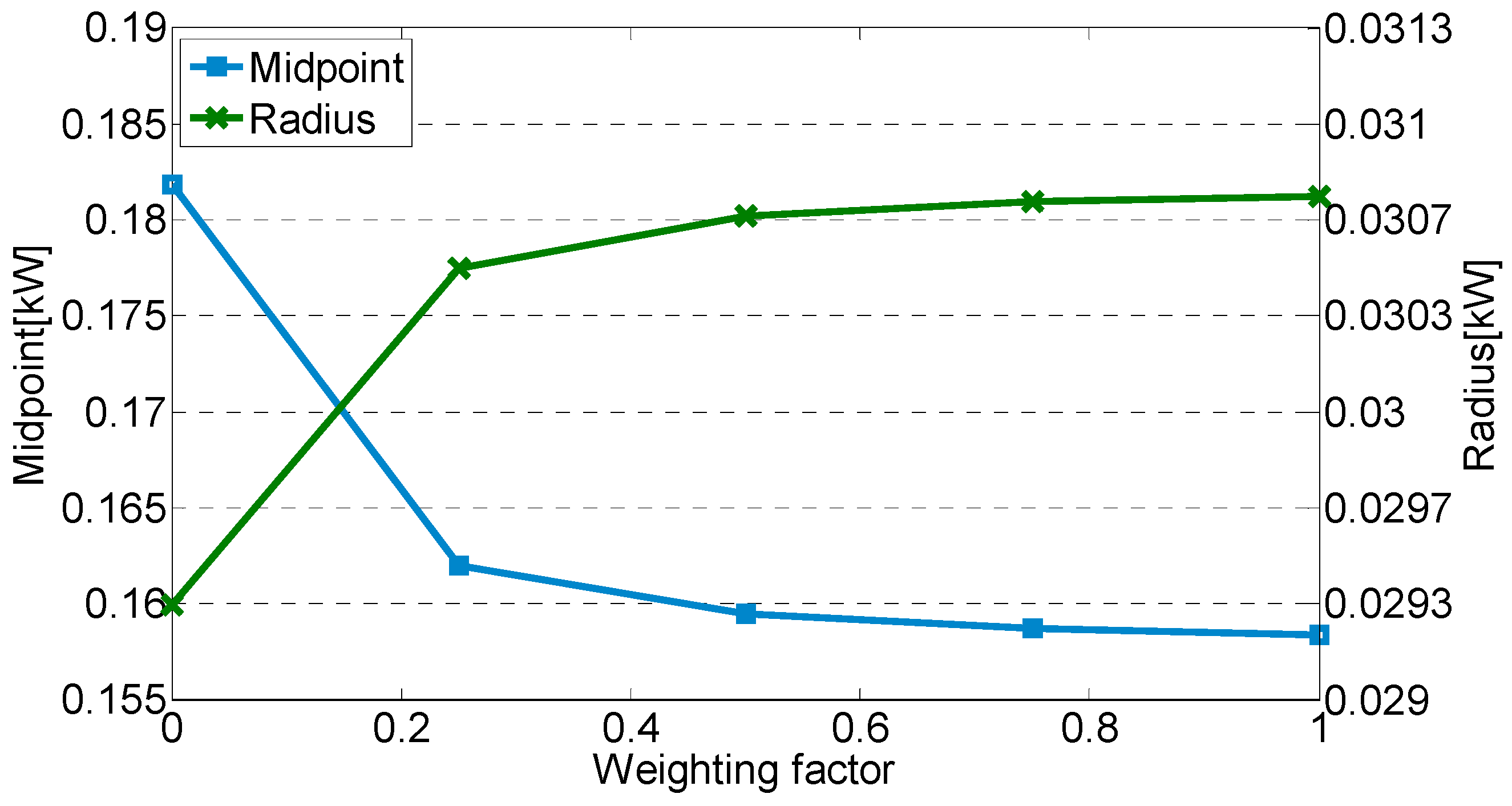
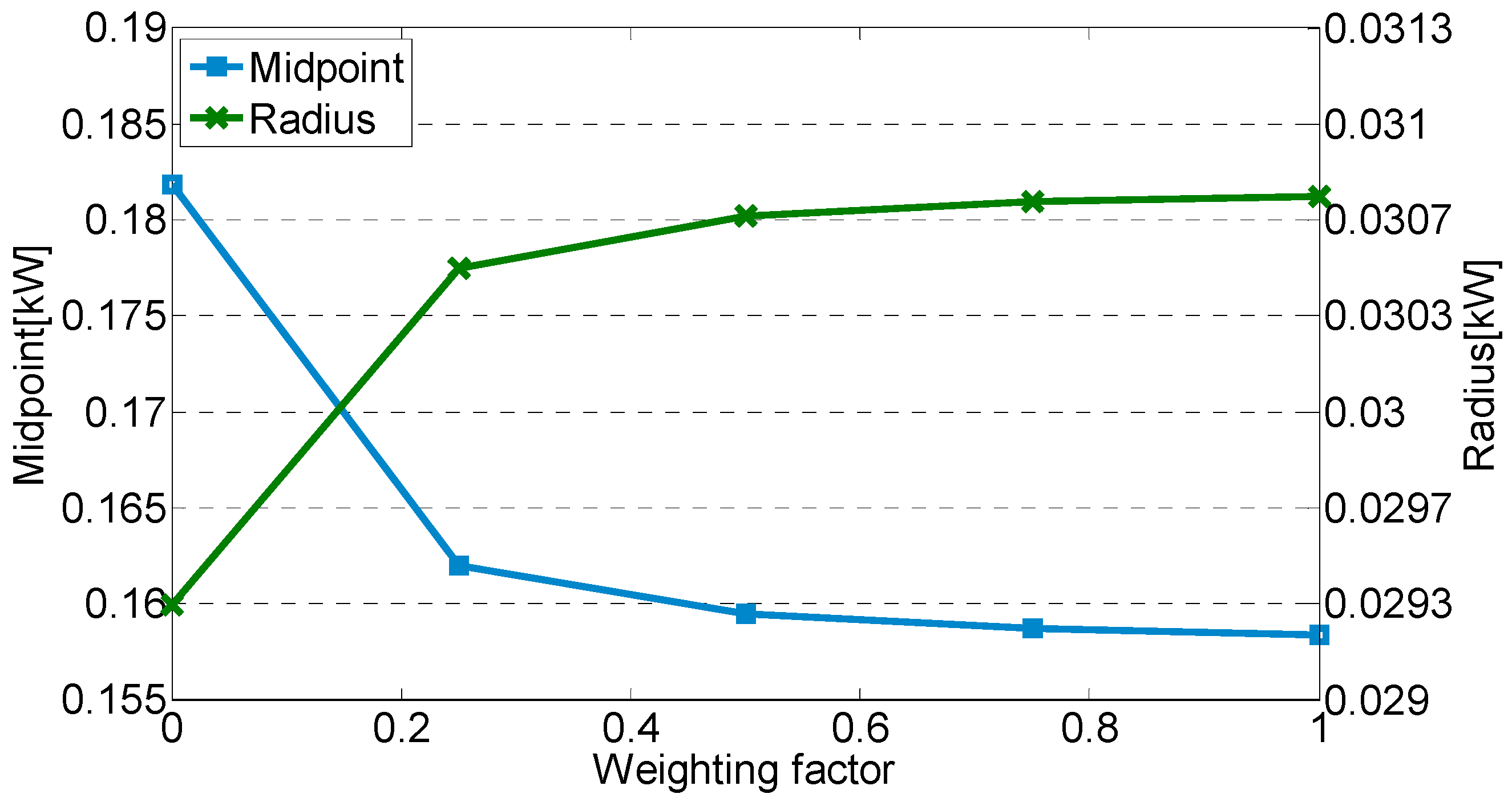
5.4. Sensitivity Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, N.; Hedman, K.W.H. Economic assessment of energy storage in systems with high levels of renewable resources. IEEE Trans. Sustain. Energy 2015, 6, 1103–1111. [Google Scholar] [CrossRef]
- Jia, Y.R.; Ramachandaramurthy, V.K.; Kang, M.T. Modeling of electric vehicle fast charging station and impact on network voltage. In Proceedings of the IEEE Conference on Clean Energy and Technology (CEAT), Langkawi, Malaysia, 18–20 November 2013.
- Leou, R.C.; Su, C.L.; Lu, C.N. Stochastic analyses of electric vehicle charging impacts on distribution network. IEEE Trans. Power Syst. 2014, 29, 1055–1063. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Impact of electric vehicle load on power system oscillatory stability. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 September–3 October 2013.
- Sexauer, J.M.; McBee, K.D.; Bloch, K.A. Applications of probability model to analyze the effects of electric vehicle chargers on distribution transformers. IEEE Trans. Power Syst. 2013, 28, 847–854. [Google Scholar] [CrossRef]
- Santos, A.; McGuckin, N.; Nakamoto, H.Y. Summary of Travel Trends: 2009 National Household Travel Survey; Rep.FHWA-PL-11022; U.S. Department of Transportation Federal Highway Administration: Washington, DC, USA, 2011.
- Aravinthan, V.; Jewell, W. Controlled electric vehicle charging for mitigating impacts on distribution assets. IEEE Trans. Smart Grid 2015, 6, 999–1099. [Google Scholar] [CrossRef]
- Xu, Y.L. Optimal distributed charging rate control of plug-in electric vehicles for demand management. IEEE Trans. Power Syst. 2015, 30, 1536–1545. [Google Scholar] [CrossRef]
- Nafisi, H.; Agah, S.M.M.; Abyaneh, H.A. Two-stage optimization method for energy loss minimization in microgrid based on smart power management scheme of PHEVs. IEEE Trans. Smart Grid 2016, 7, 1268–1276. [Google Scholar] [CrossRef]
- Shao, C.C.; Wang, X.F.; Wang, X.L. Layered and distributed charge load dispatch of considerable electric vehicles. IEEE Trans. Power Syst. 2015, 30, 1858–1867. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, D.; Jia, H.J. Aggregation and bidirectional charging power control of plug-in hybrid electric vehicles: Generation system adequacy analysis. IEEE Trans. Sustain. Energy 2015, 6, 325–335. [Google Scholar] [CrossRef]
- Lee, W.; Xiang, L.; Schober, R. Electric vehicle charging stations with renewable power generators: A game theoretical analysis. IEEE Trans. Smart Grid 2015, 6, 608–617. [Google Scholar] [CrossRef]
- Cheng, L.; Chang, Y.; Huang, R. Mitigating voltage problem in distribution system with distributed solar generation using electric vehicles. IEEE Trans. Sustain. Energy 2015, 6, 1475–1484. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P. An aggregate model of plug-in electric vehicles for primary frequency control. IEEE Trans. Power Syst. 2015, 30, 1475–1482. [Google Scholar] [CrossRef]
- Vayá, M.G.; Andersson, G. Optimal bidding strategy of a plug-in electric vehicle aggregator in day-ahead electricity markets under uncertainty. IEEE Trans. Power Syst. 2015, 30, 2375–2385. [Google Scholar] [CrossRef]
- Soares, J.; Morais, H.; Sousa, T. Day-ahead resource scheduling including demand response for electric vehicles. IEEE Trans. Smart Grid 2013, 4, 596–605. [Google Scholar] [CrossRef]
- Vagropoulos, S.I.; Kyriazidis, D.K.; Bakirtzis, A.G. Real-time charging management framework for electric vehicle aggregators in a market environment. IEEE Trans. Smart Grid 2016, 7, 948–957. [Google Scholar] [CrossRef]
- Gruber, J.K.; Huerta, F.; Matatagui, P. Advanced building energy management based on a two-stage receding horizon optimization. Appl. Energy 2015, 160, 194–205. [Google Scholar] [CrossRef]
- Wu, W.C.; Zhang, B.M.; Zhen, T.Y. Multiple time-scale coordinated power control system to accommodate significant wind power penetration and its real application. In Proceedings of the IEEE Power and Energy Society General Meeting (PES), San Diego, CA, USA, 22–26 July 2012.
- Li, Z.J.; Xue, A.C.; Bi, T.S. On the characteristic of the predicted wind power based on three-parameter Weibull distribution. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014.
- Ma, X.Y.; Sun, Y.Z.; Fang, H.L. Scenario generation of wind power based on statistical uncertainty and variability. IEEE Trans. Sustain. Energy 2013, 4, 894–904. [Google Scholar] [CrossRef]
- Ke, D.P.; Chung, C.Y.; Sun, Y.Z. A novel probabilistic optimal power flow model with uncertain wind power generation described by customized Gaussian mixture model. IEEE Trans. Sustain. Energy 2016, 7, 200–212. [Google Scholar] [CrossRef]
- Silva, A.M.L.; González-Fernández, R.A.; Flávio, S.A. Composite reliability evaluation with renewable sources based on quasi-sequential Monte Carlo and cross entropy methods. In Proceedings of the International Conference on Probabilistic Methods Applied to Power System (PMAPS), Durham, NC, USA, 7–20 July 2014.
- Li, Z.S.; Guo, Q.L.; Sun, H.B. Emission-concerned wind-EV coordination on the transmission grid side with network constraints: Concept and case study. IEEE Trans. Smart Grid 2013, 4, 1692–1704. [Google Scholar] [CrossRef]
- Yao, W.F.; Zhao, J.H.; Wen, F.S. A hierarchical decomposition approach for coordinated dispatch of plug-in electric vehicles. IEEE Trans. Power Syst. 2013, 28, 2768–2778. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Jiang, C.W.; Shen, J.S. Coordination of hydro units with wind power generation using interval optimization. IEEE Trans. Sustain. Energy 2015, 6, 443–453. [Google Scholar] [CrossRef]
- Kwon, D.H.; Kim, Y.J.; Moon, H.J. Optimal control of on-board PEV chargers considering distribution line capacity and building load imbalance. In Proceedings of the Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 20–21 February 2015.
- Jiang, C. Theories and Algorithm of Uncertain Optimization Based on Interval. Ph.D. Thesis, Hunan University, Changsha, Hunan, China, 2008. [Google Scholar]
- Das, B. Radial distribution system power flow using interval arithmetic. Int. J. Electr. Power Energy Syst. 2002, 24, 827–836. [Google Scholar] [CrossRef]
- Goswami, S.K.; Basu, S.K. A new algorithm for the reconfiguration of distribution feeders for loss minimization. IEEE Trans. Power Deliv. 1992, 7, 1484–1491. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Names of PEVs | Node Location | Number of PEVs | Types of PEVs |
|---|---|---|---|
| 1 | 9 | 200 | A |
| 2 | 9 | 200 | B |
| 3 | 13 | 400 | A |
| 4 | 13 | 300 | B |
| 5 | 16 | 400 | A |
| 6 | 16 | 300 | B |
| 7 | 29 | 300 | A |
| 8 | 29 | 400 | B |
| Parameters | ω | ω′ | γ | γ′ | α | α′ | ηch | ηdch | SOCevmin | SOCevmax | ESOC |
| Value | 0.2 | 0.2 | 3 | 3 | 2% | 2% | 90% | 90% | 5% | 95% | 90% |
| Number | Day-Ahead Cluster Number | Real-Time Cluster Number (UST) | Real-Time Dispatch Response Time (s) | Objective Value (MW) | Difference Between Load Peak and Valley (MW) |
|---|---|---|---|---|---|
| 1 | 5 × 5 × 3 × 2 1 | 250 | 0.4502 | 0.2286 | 0.3505 |
| 500 | 0.9978 | 0.2147 | 0.2808 | ||
| 2500 | 2.7850 | 0.2135 | 0.2796 | ||
| 2 | 8 × 8 × 3 × 2 1 | 250 | 0.4516 | 0.2085 | 0.2701 |
| 500 | 0.9990 | 0.1903 | 0.2357 | ||
| 2500 | 2.7924 | 0.1876 | 0.2300 | ||
| 3 | 10 × 10 × 4 × 2 1 | 250 | 0.4507 | 0.1963 | 0.2486 |
| 500 | 0.9852 | 0.1890 | 0.2259 | ||
| 2500 | 2.7952 | 0.1871 | 0.2215 |
| Scenarios | System Wind Power Level (%) 1 | System PEV Level (%) 1 | Objective Value (MW) |
|---|---|---|---|
| 1 | 80 | 80 | 0.1947 |
| 2 | 80 | 100 | 0.1953 |
| 3 | 80 | 120 | 0.2077 |
| 4 | 100 | 80 | 0.2031 |
| 5 | 100 | 100 | 0.1876 |
| 6 | 100 | 120 | 0.1902 |
| 7 | 120 | 80 | 0.2181 |
| 8 | 120 | 100 | 0.1926 |
| 9 | 120 | 120 | 0.1869 |
| γ | γ’ | Day-Ahead Objective Value (MW) | Real Objective Value (MW) | Security Calibration |
|---|---|---|---|---|
| 2 | 2 | 0.1535 | 0.1558 | 99.88% |
| 2 | 3 | 0.1535 | 0.1642 | 99.23% |
| 3 | 3 | 0.1892 | 0.1876 | 99.97% |
| 3 | 4 | 0.1892 | 0.2214 | 93.59% |
| 4 | 4 | 0.2201 | 0.2212 | 99.37% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Guo, C.; Ding, Y.; Wang, L.; Zhu, B.; Xu, L. A Multi-Period Framework for Coordinated Dispatch of Plug-in Electric Vehicles. Energies 2016, 9, 370. https://doi.org/10.3390/en9050370
Huang Y, Guo C, Ding Y, Wang L, Zhu B, Xu L. A Multi-Period Framework for Coordinated Dispatch of Plug-in Electric Vehicles. Energies. 2016; 9(5):370. https://doi.org/10.3390/en9050370
Chicago/Turabian StyleHuang, Yinuo, Chuangxin Guo, Yi Ding, Licheng Wang, Bingquan Zhu, and Lizhong Xu. 2016. "A Multi-Period Framework for Coordinated Dispatch of Plug-in Electric Vehicles" Energies 9, no. 5: 370. https://doi.org/10.3390/en9050370