
Modeling for Three-Pole Radial Hybrid Magnetic Bearing Considering Edge Effect

Abstract
:1. Introduction
2. Configuration and Operational Principle
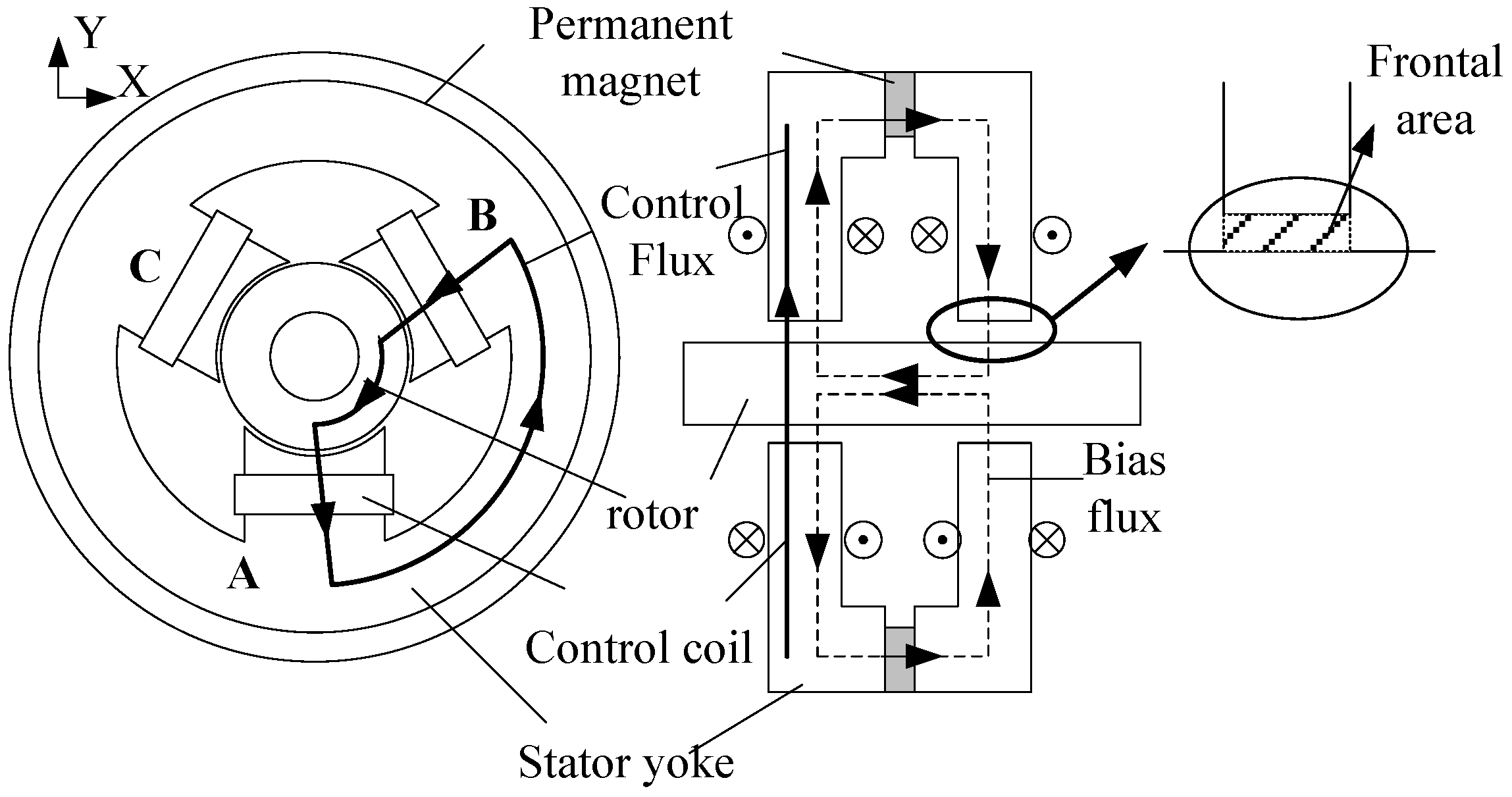
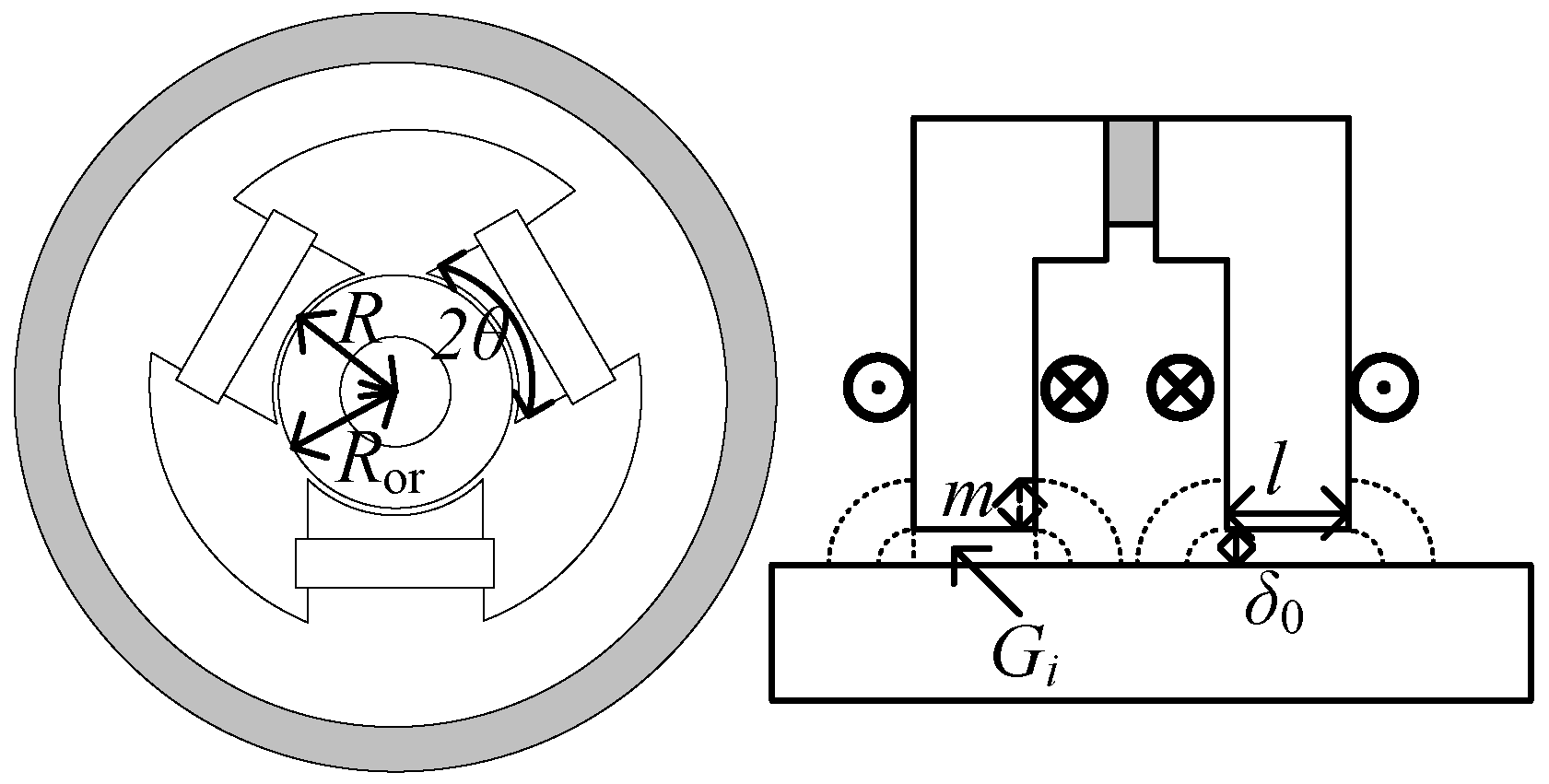
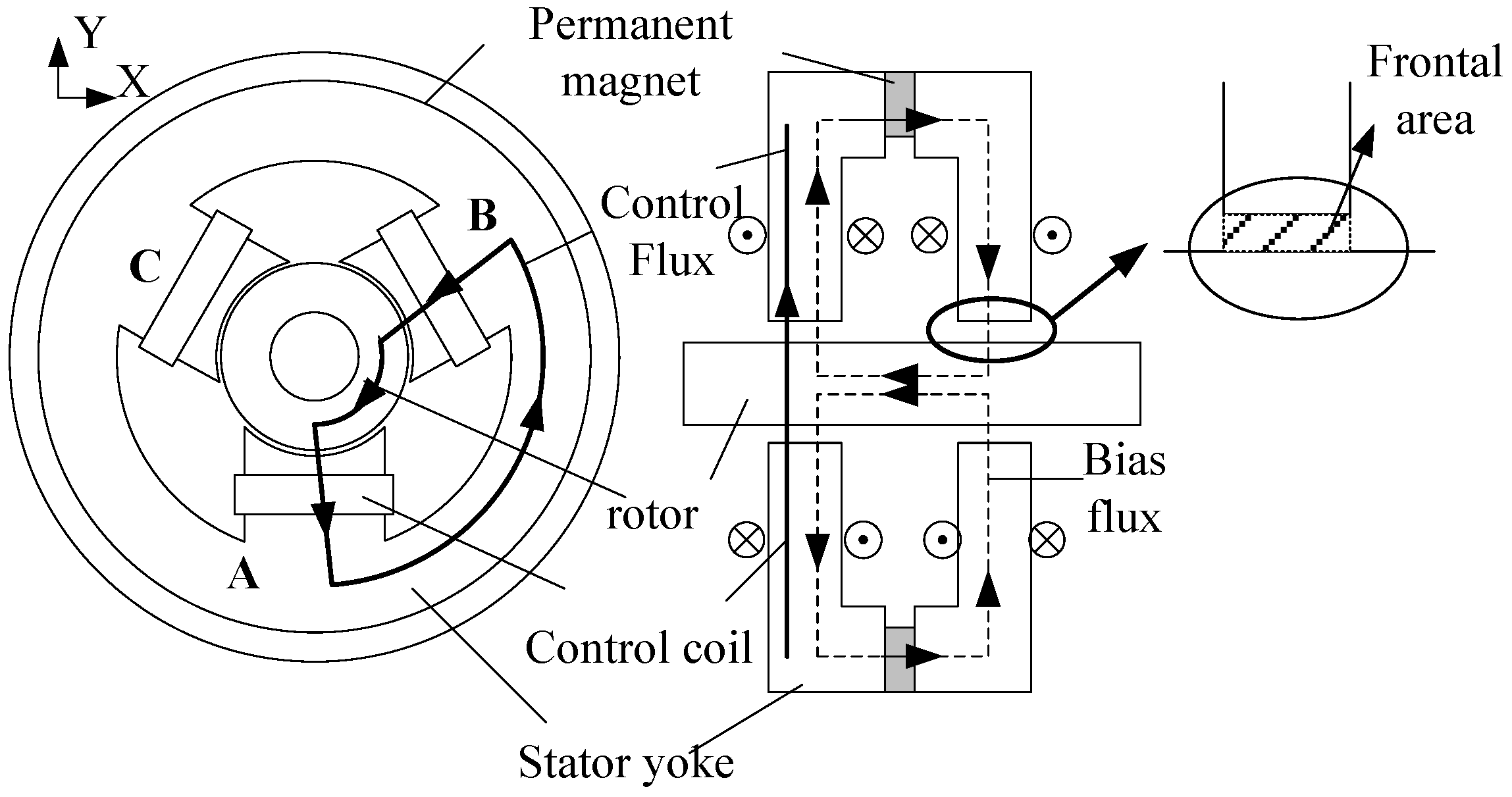
2.1. Configuration and Flux Path of Three-pole Radial HMB
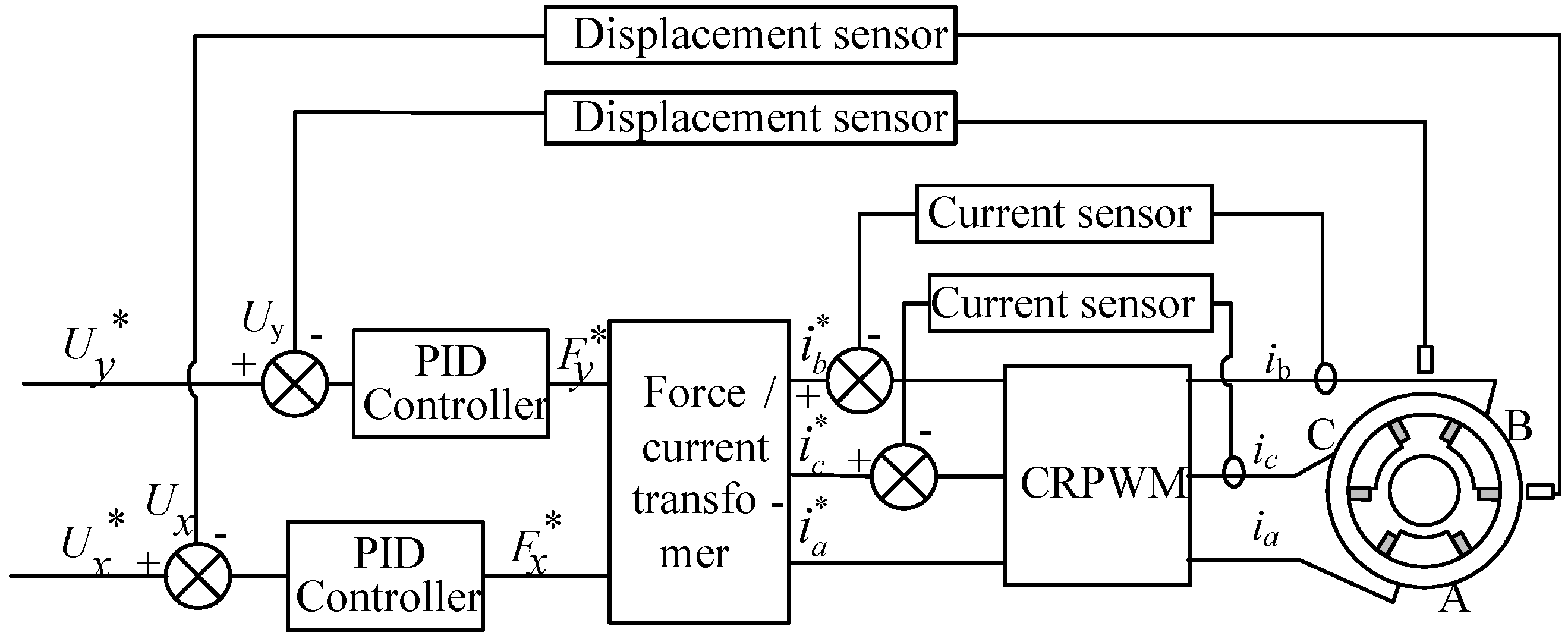
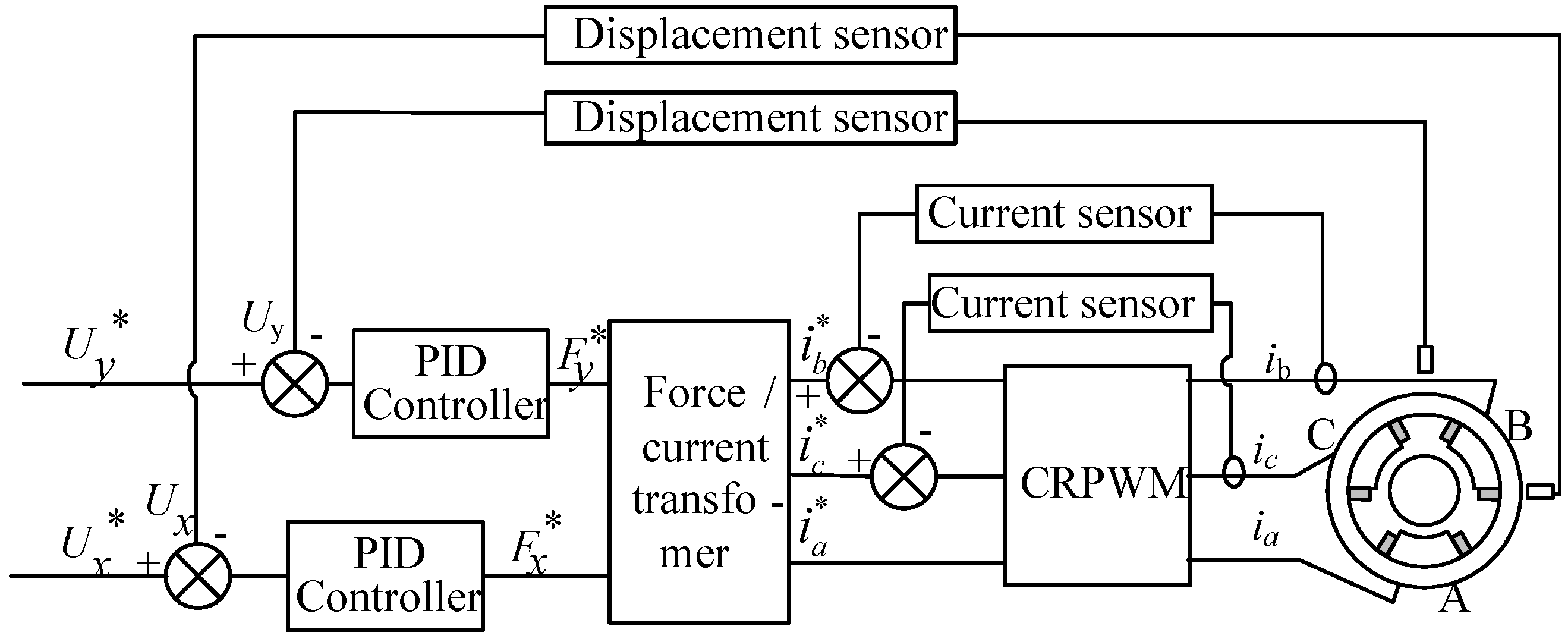
2.2. Control Principle of Three-pole Radial HMB
3. Mathematical Model Based on Edge Effect
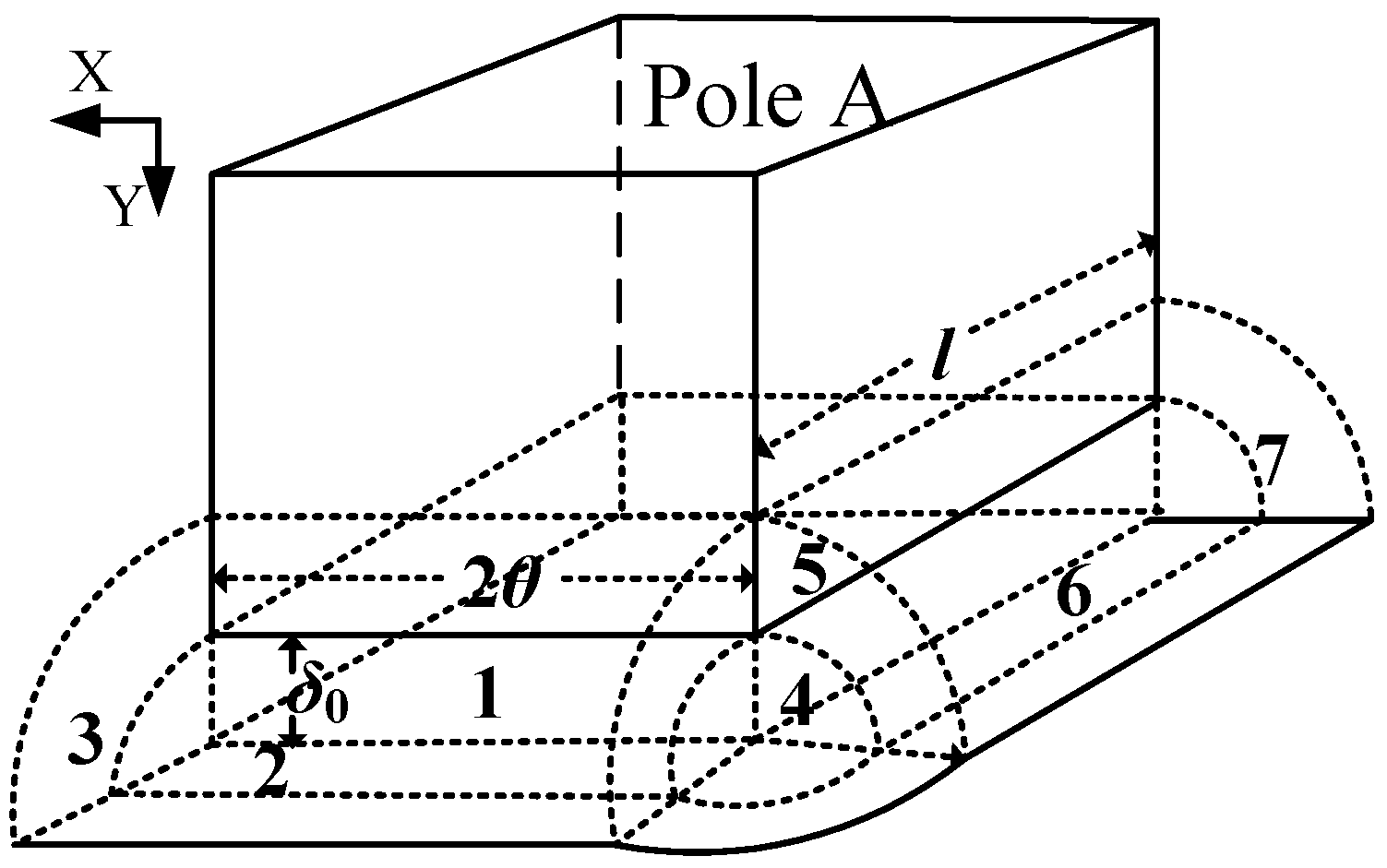
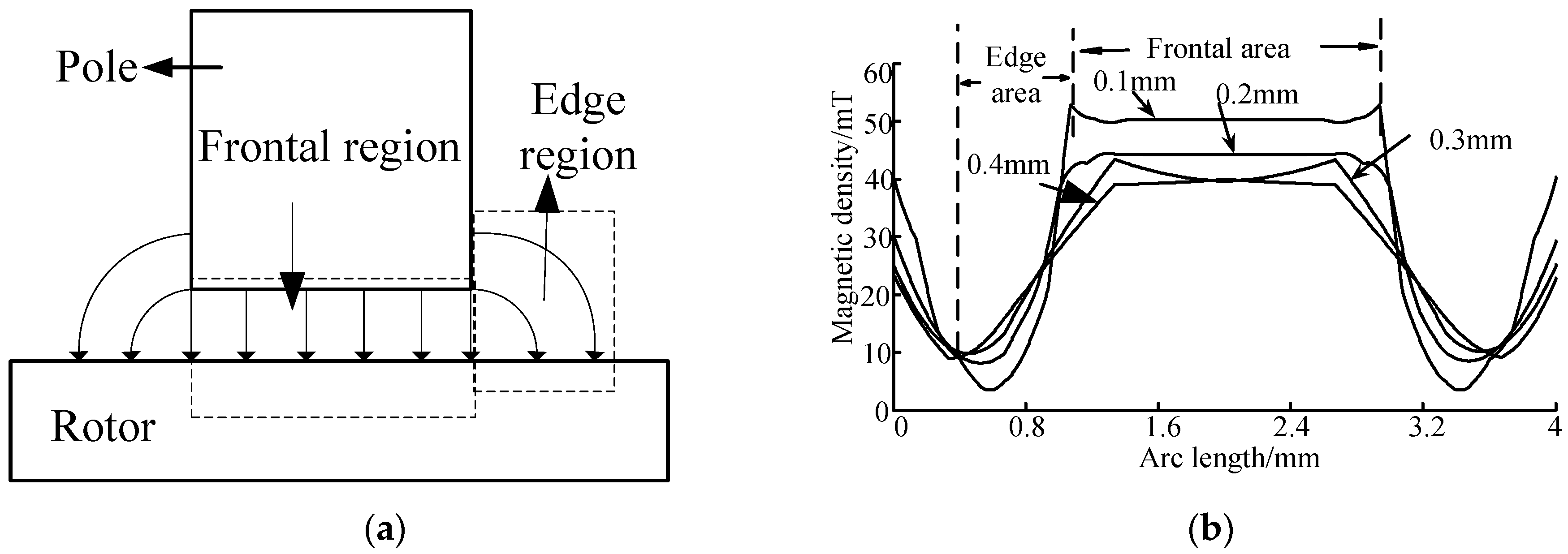
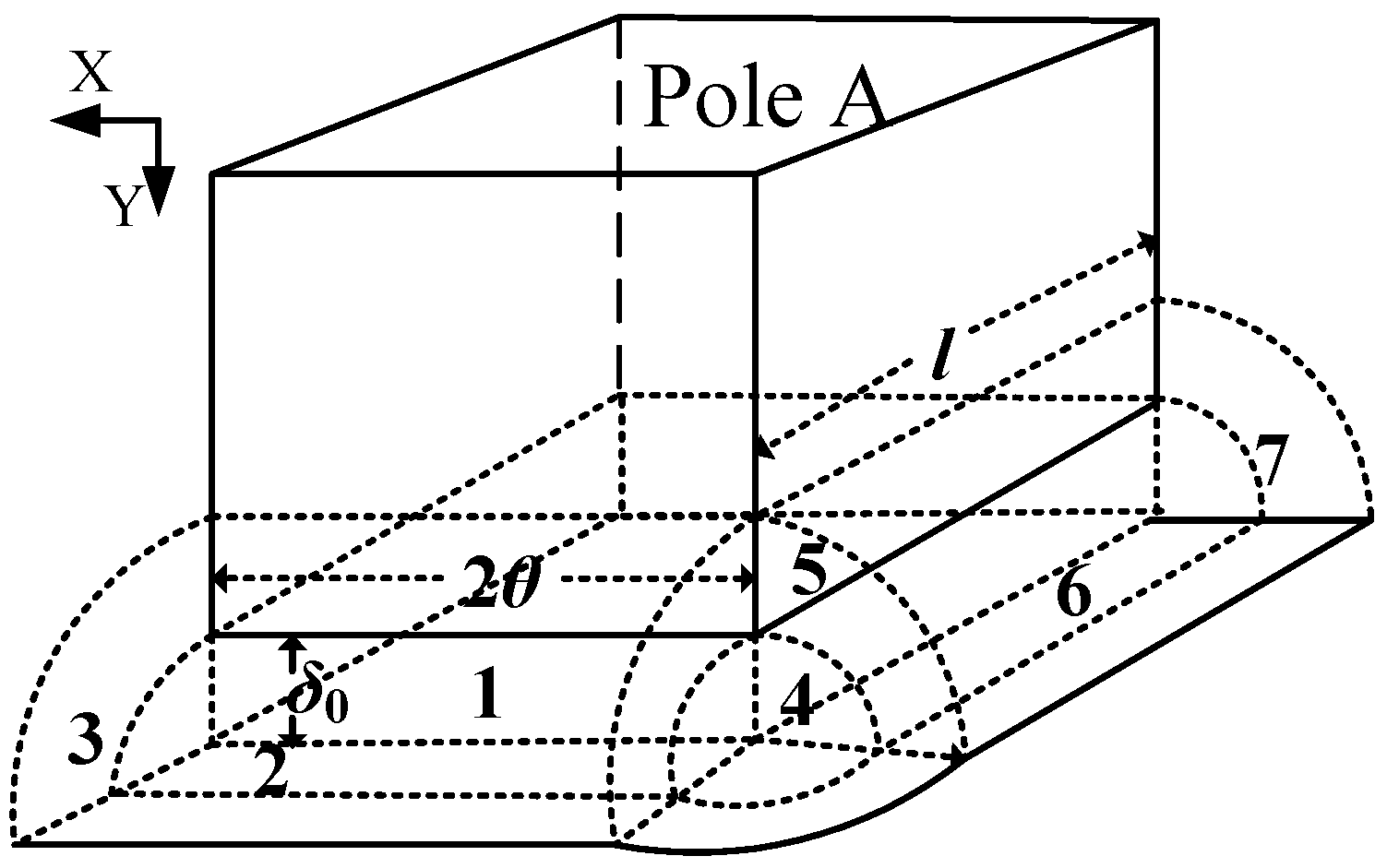
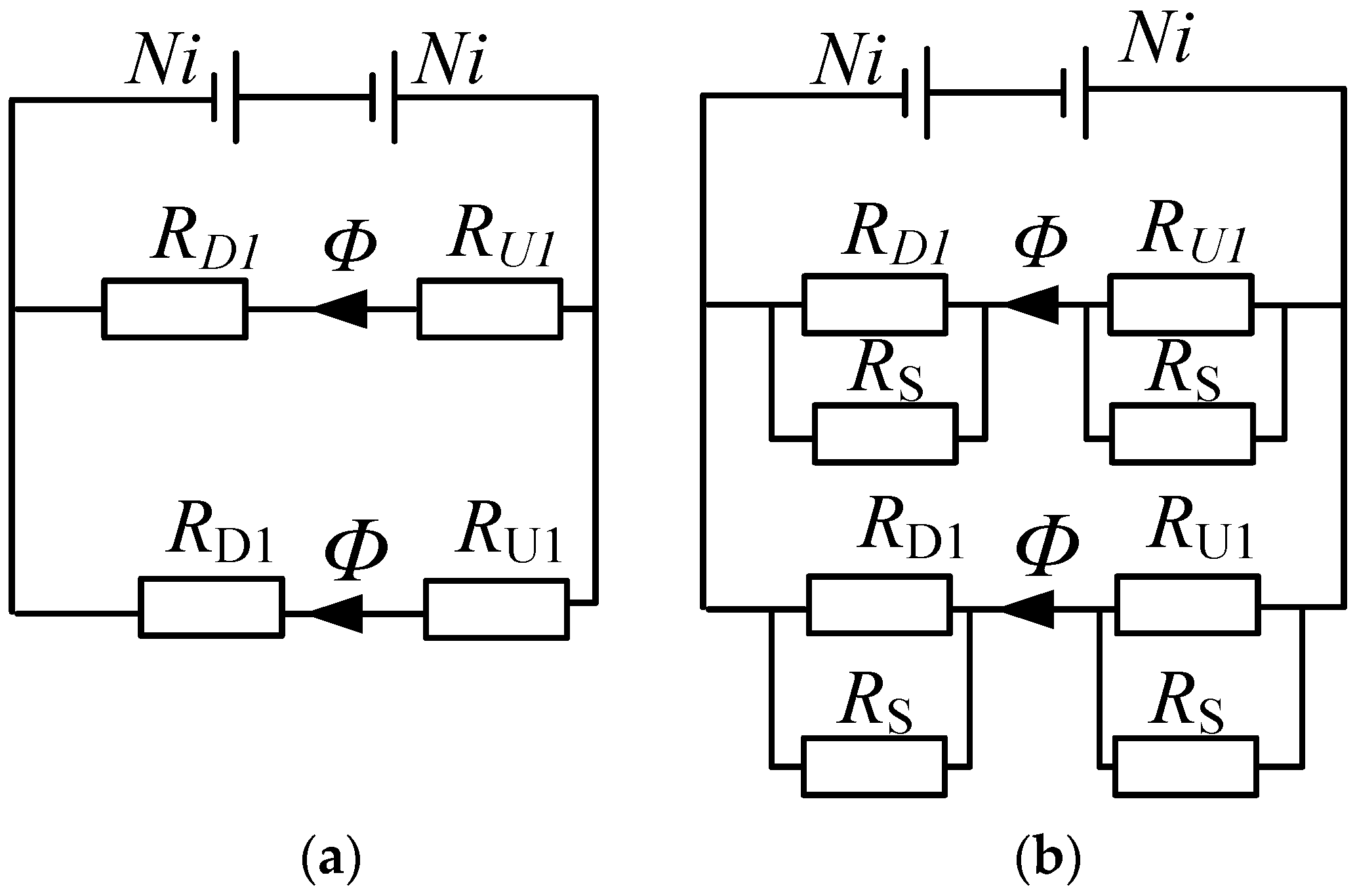
3.1. Edge Effect
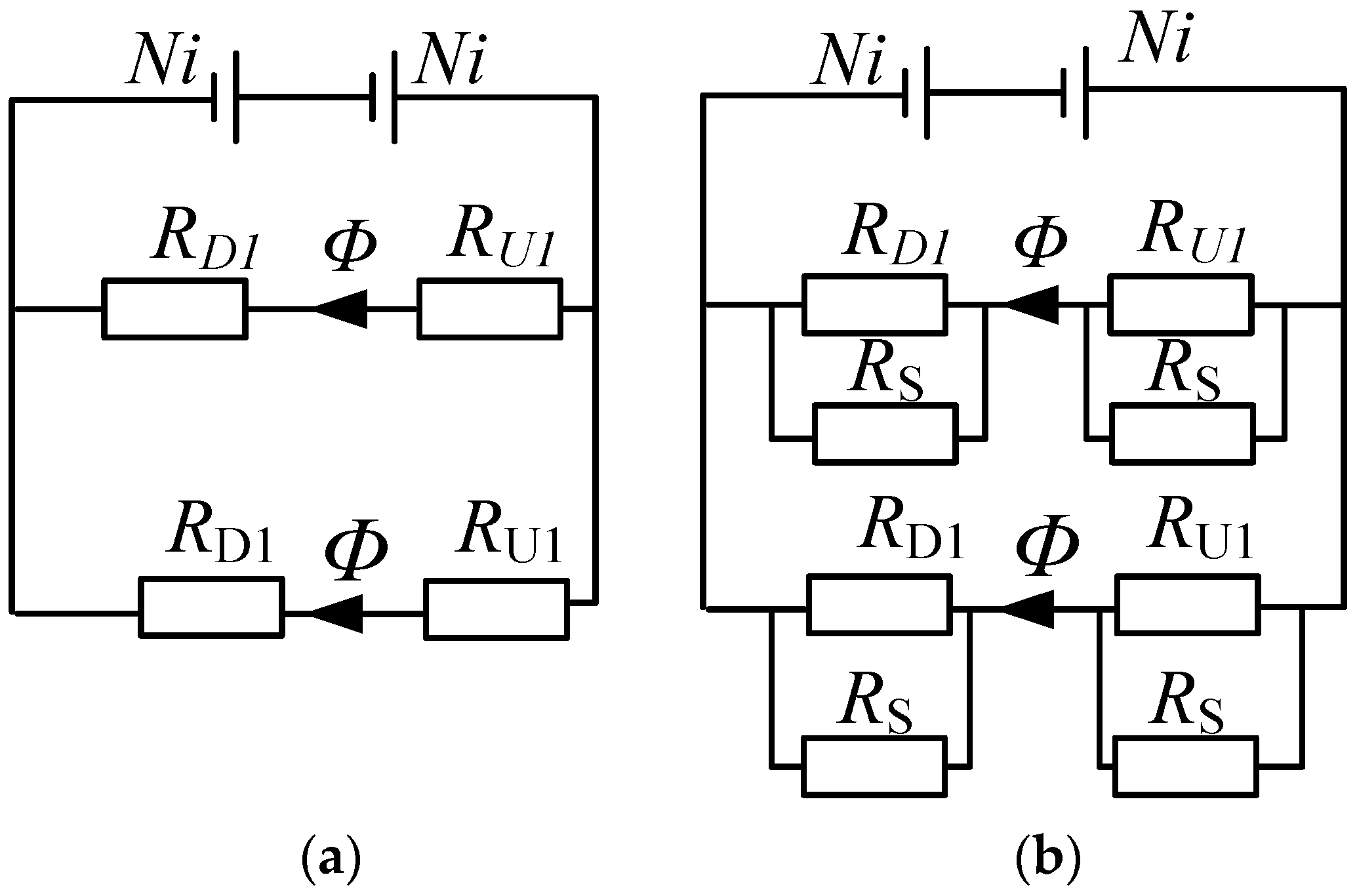
3.2. Modeling for Three-pole Radial HMB Based on Edge Effect
- (1)
- Arc and axial length of the rotor are much larger than the arc and axial lengths of the poles so the surface of the rotor and the poles are treated as flat; the air gap related to the same pole is uniform.
- (2)
- The shapes of regions are standard.
- (3)
- The eddy current effect is neglected.
- (4)
- The permeability of the stator and the rotor is infinite.
3.2.1. The Length from Pole to Rotor in Eccentric Condition
3.2.2. Permeance of Different Regions
3.2.3. Magnetomotive Force of Permanent Magnet
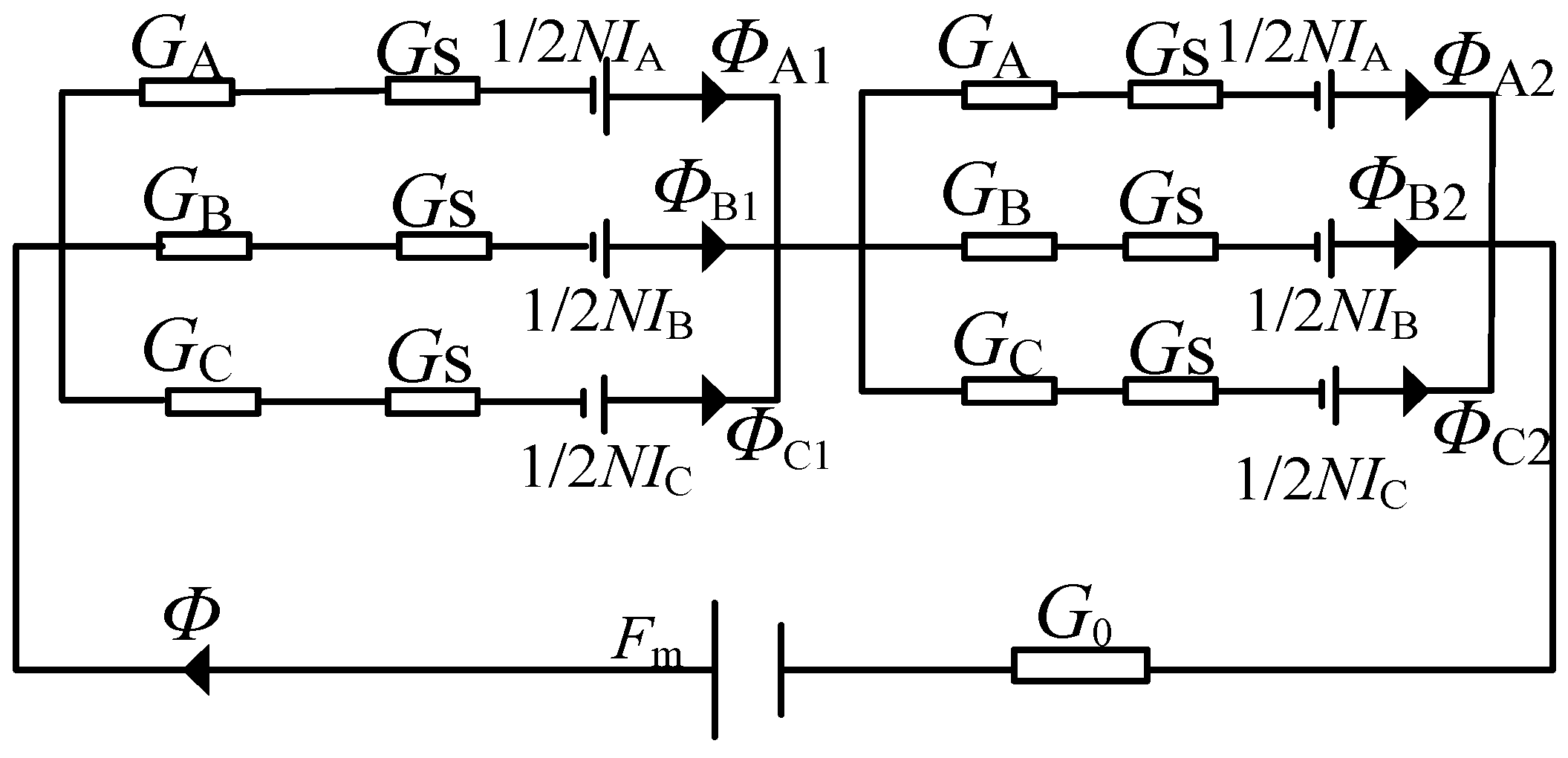
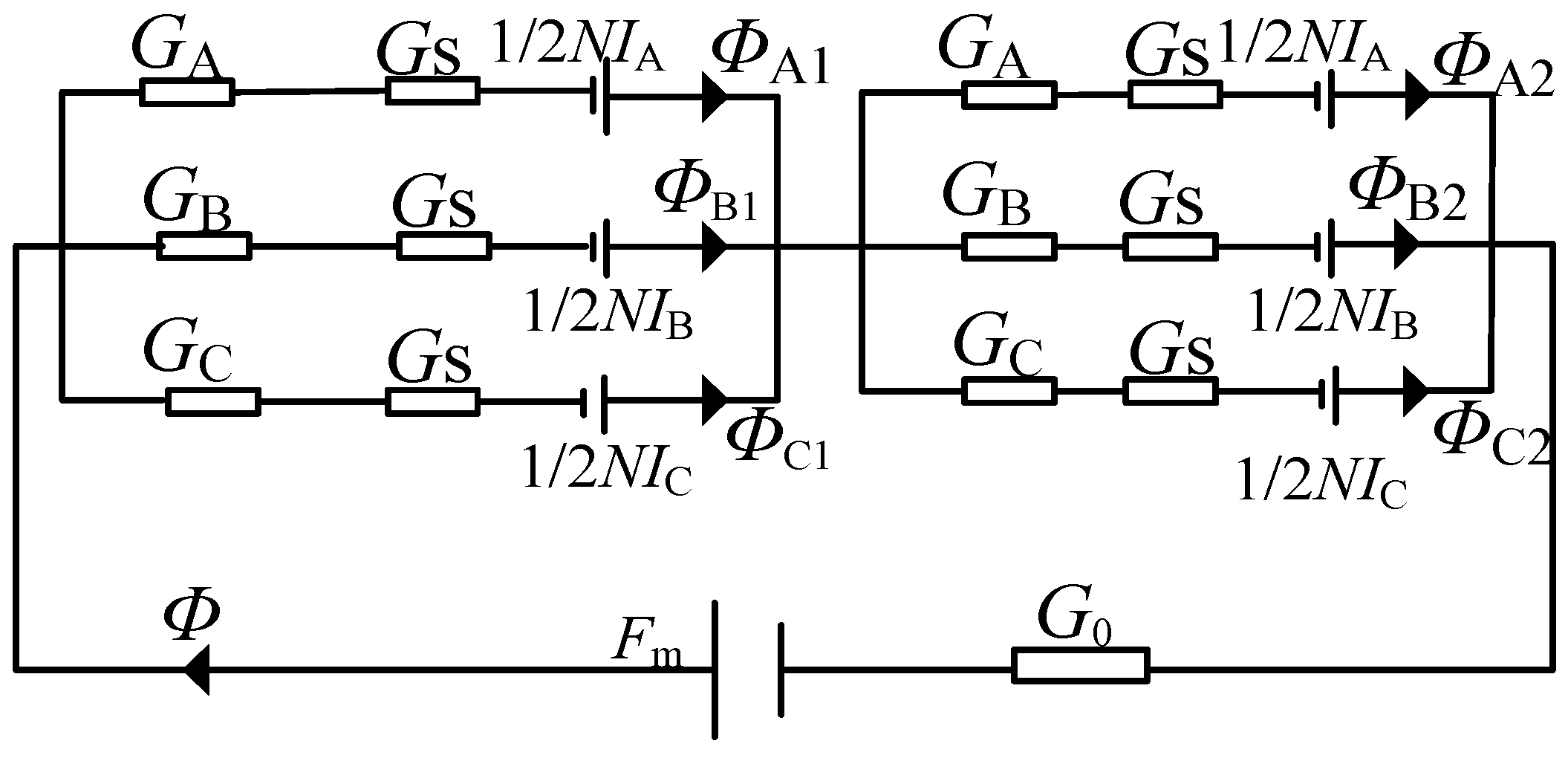
3.2.4. Calculation of Flux and Suspension Force
3.3. Analysis of Generality
3.3.1. Magnetic Bearings with Different Dimensions
3.3.2. Magnetic Bearings with Different Configurations
3.3.3. Used in Other Fields of Magnetic Bearings
4. Experiment and Analysis
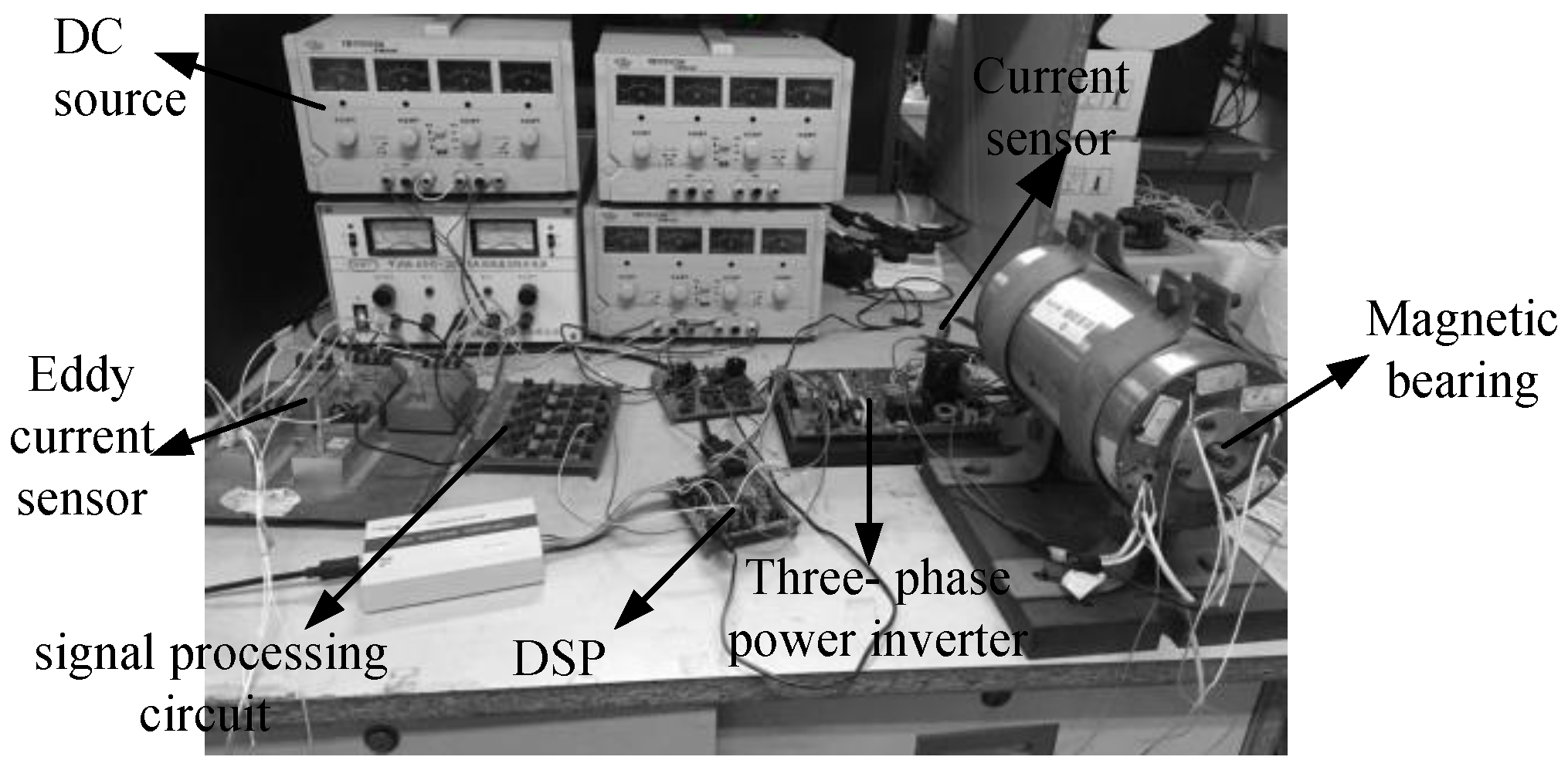
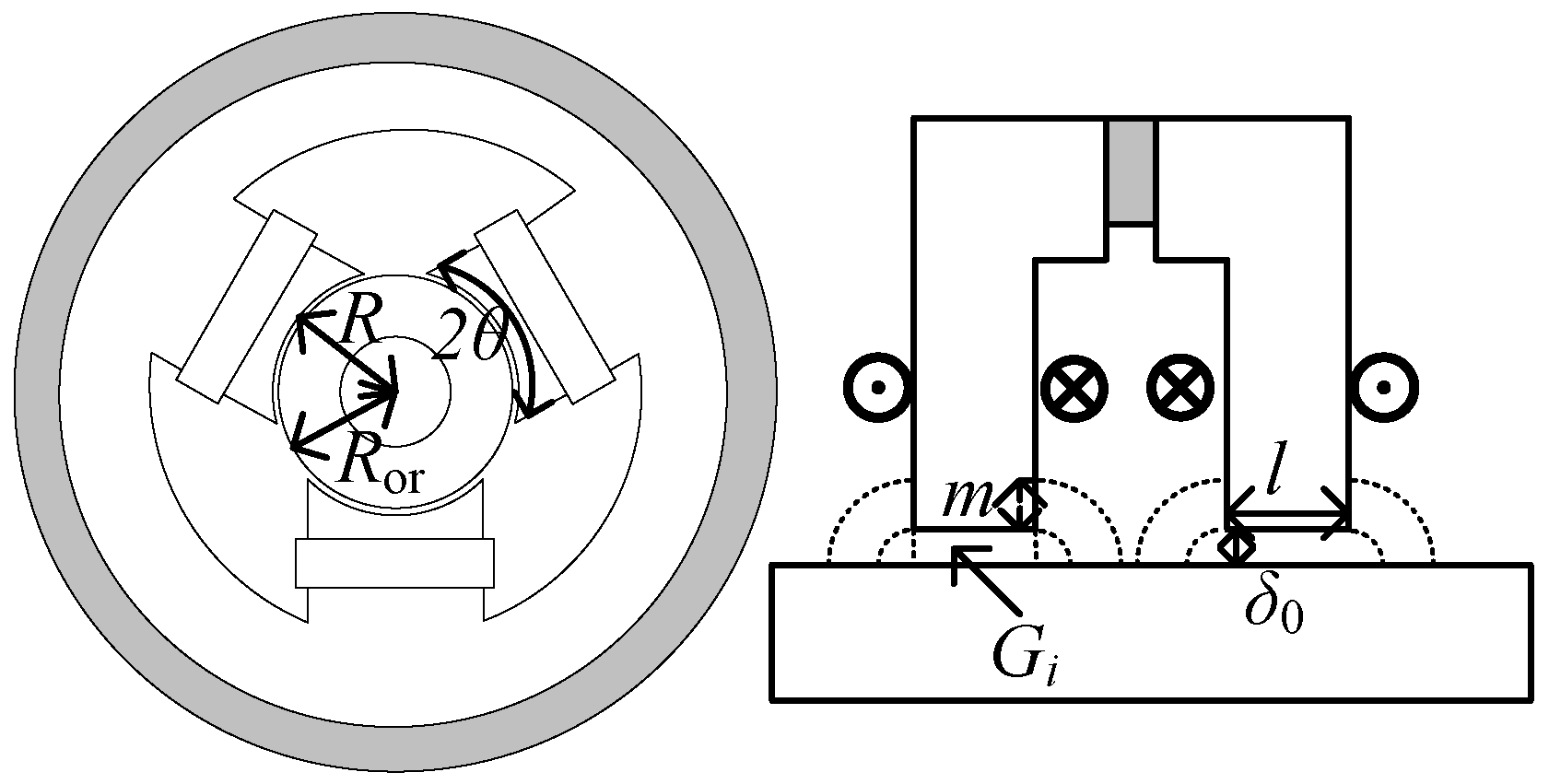
4.1. Introduction of the Three-pole Radial HMB Experimental Rig
4.2. Analysis of Results
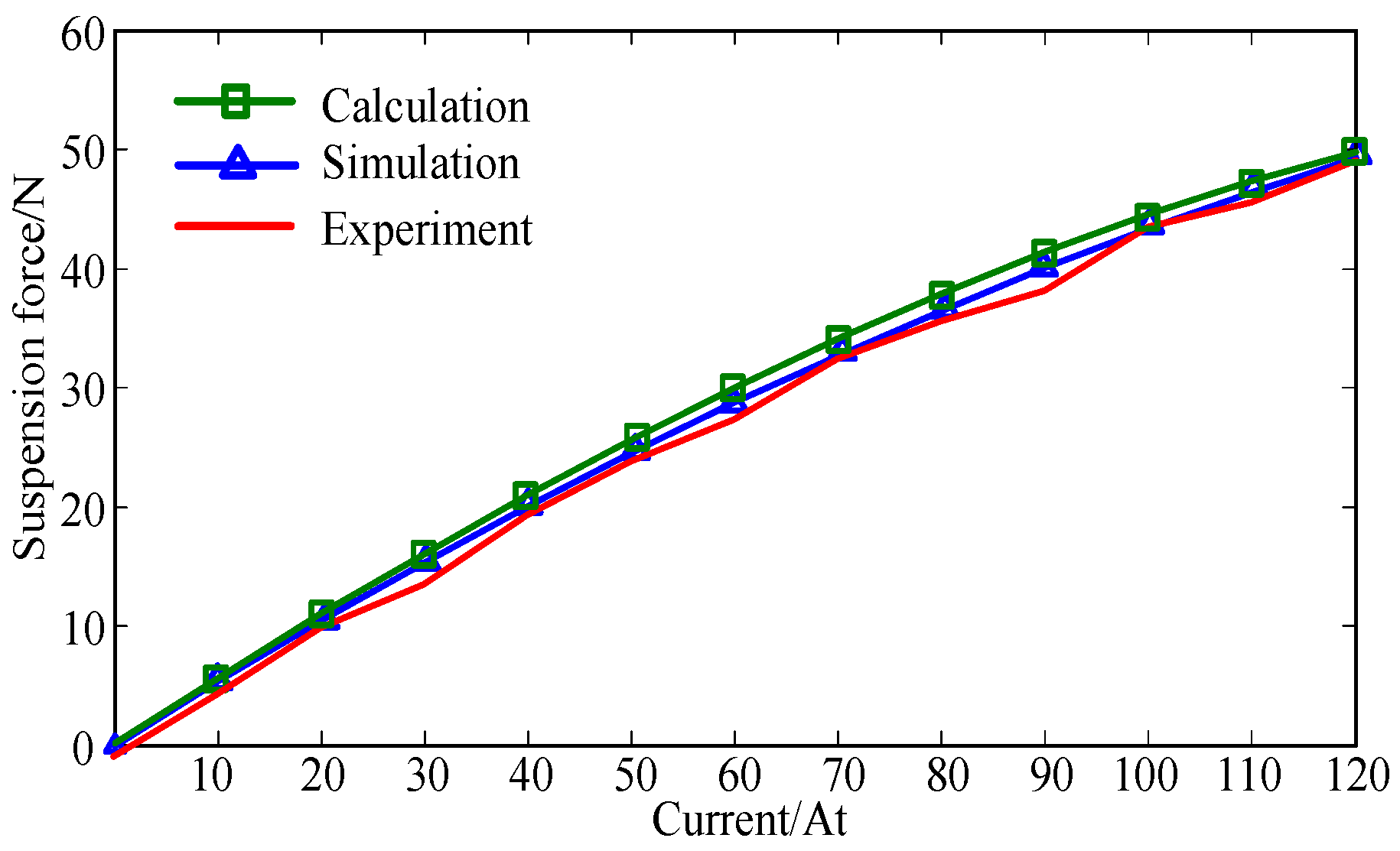
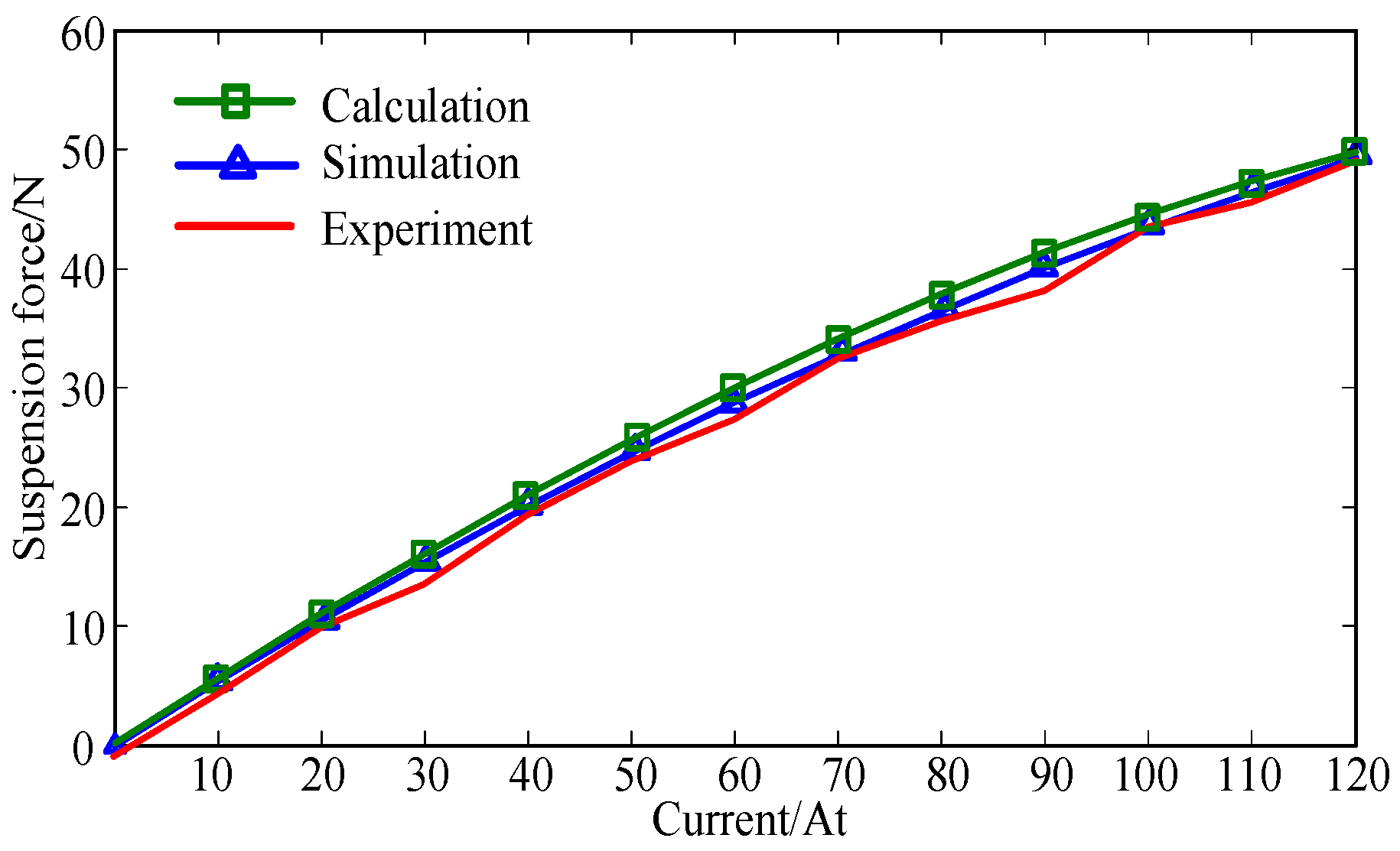
4.2.1. Test of Relationship between Force and Current
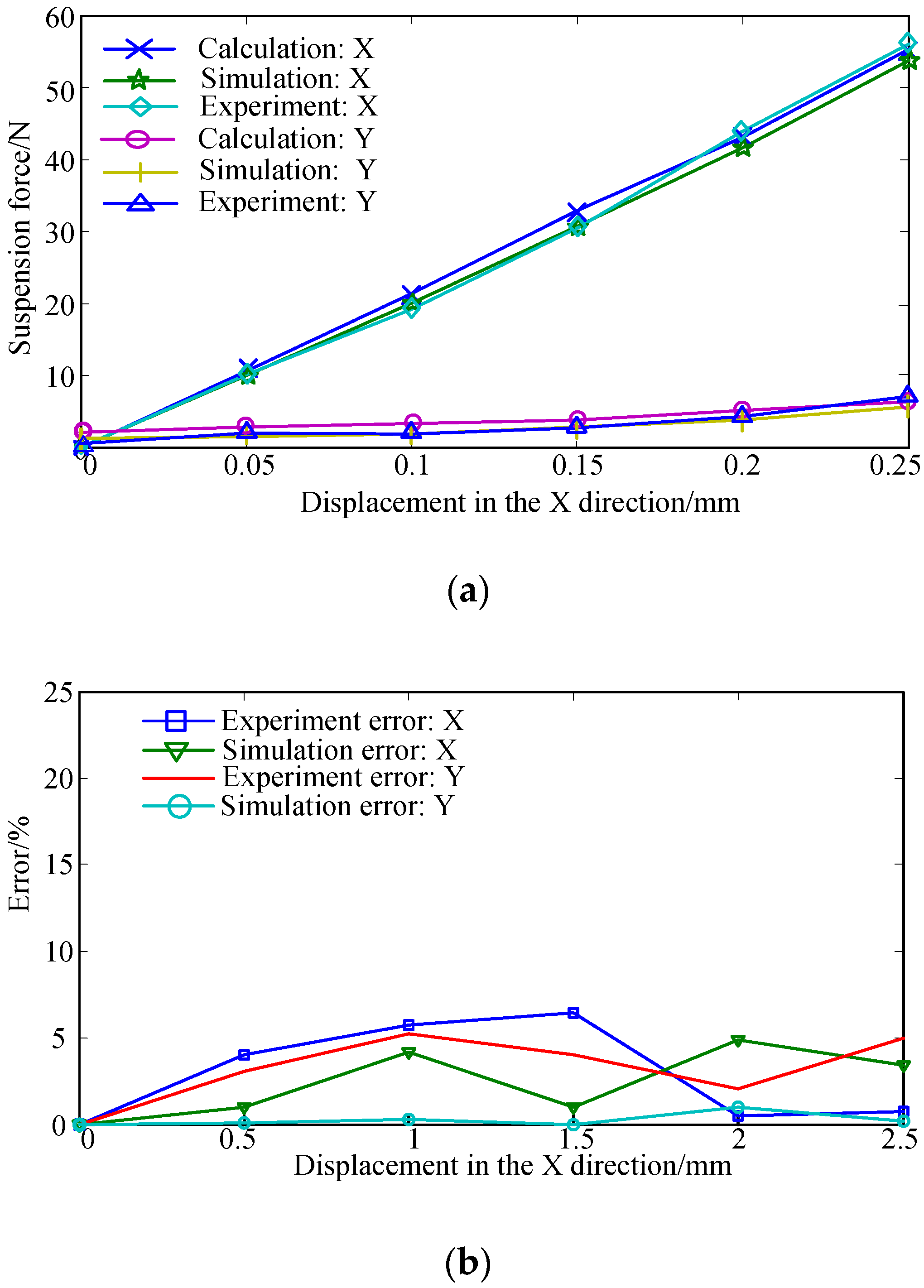
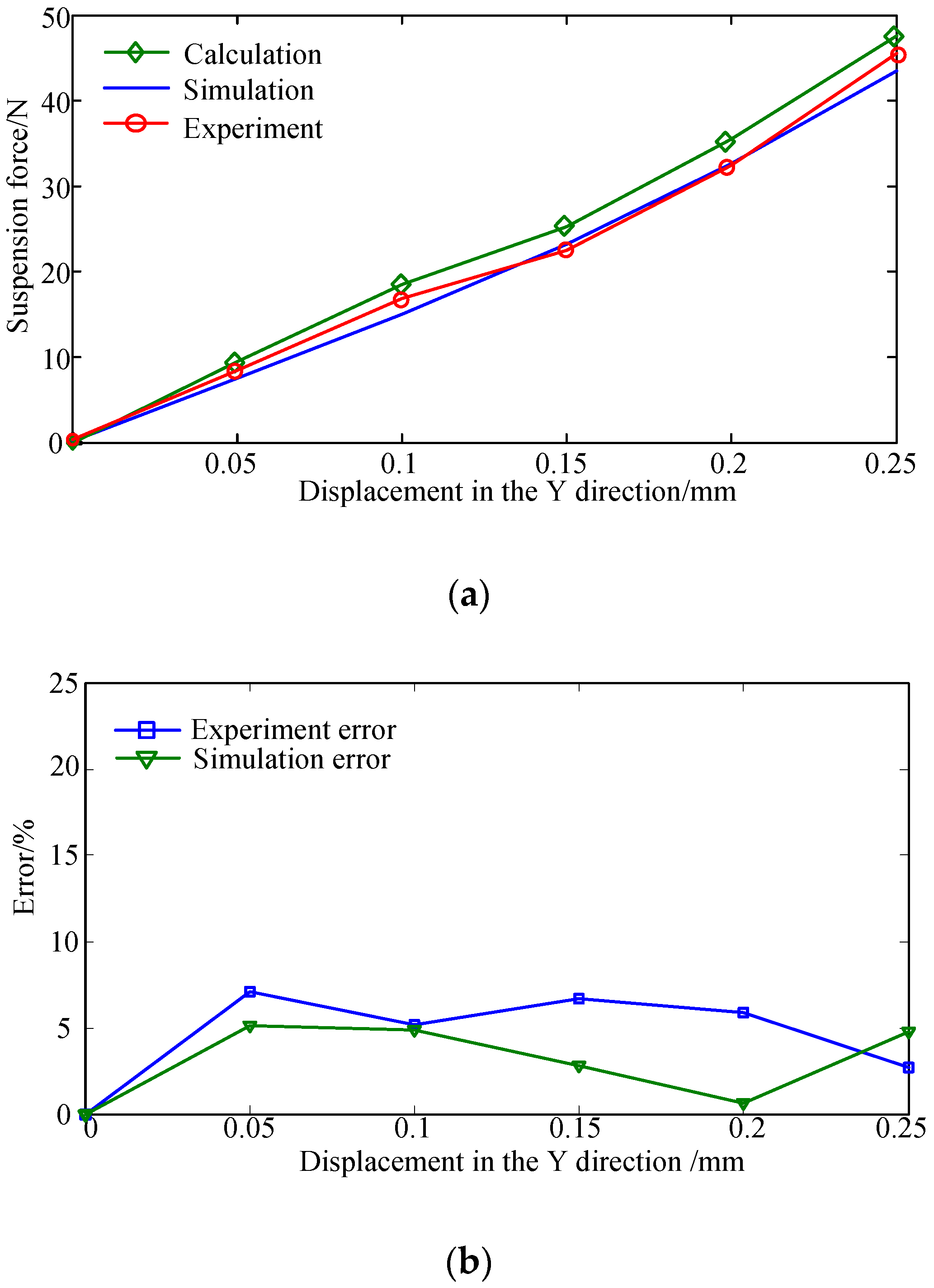
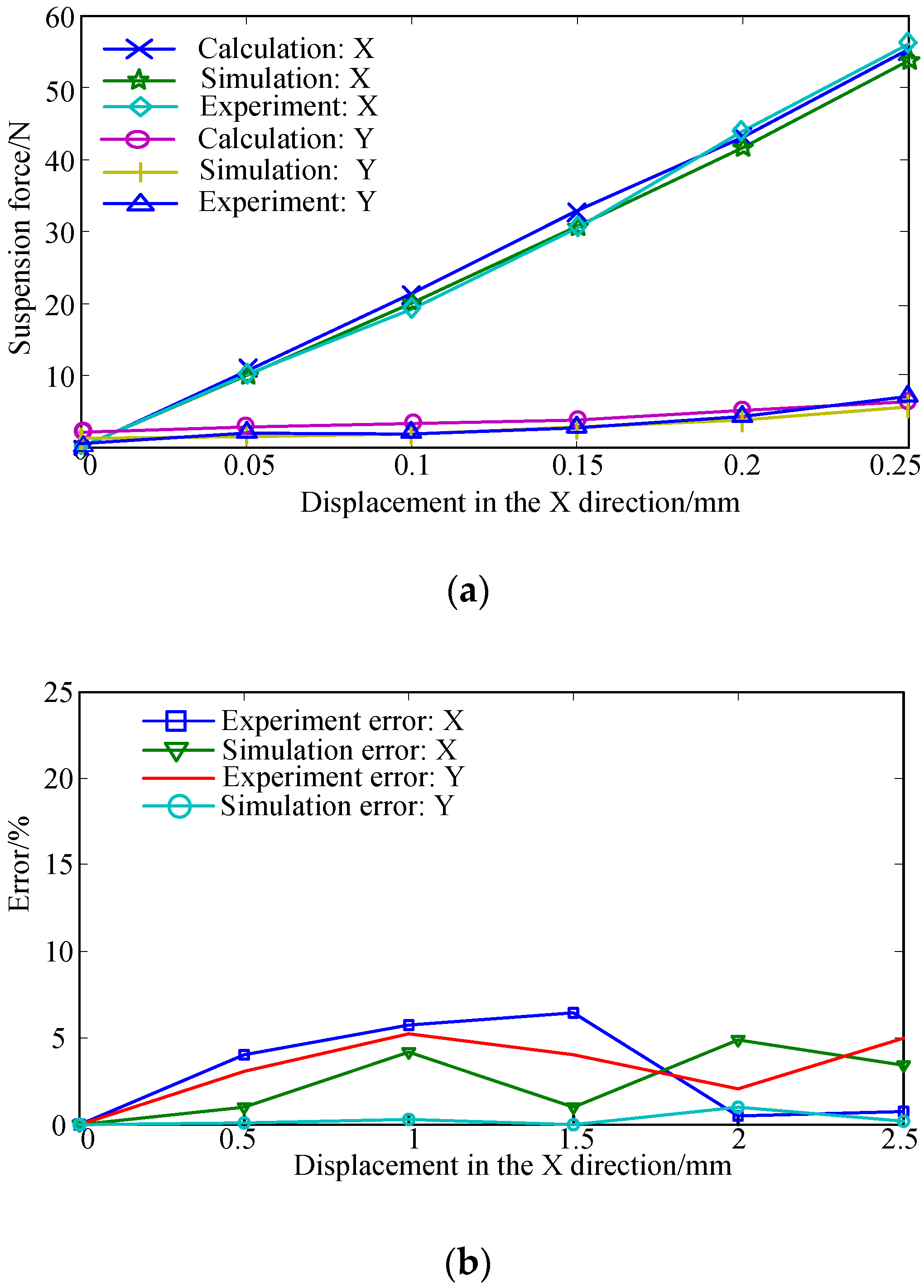
4.2.2. Test of Relationship between Force and Displacement
4.2.3. Error Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hou, E.Y.; Liu, K. A Novel Structure for Low-Loss Radial Hybrid Magnetic Bearing. IEEE Trans. Magn. 2011, 47, 4725–4733. [Google Scholar]
- Fang, J.C.; Sun, J.J.; Xu, Y.L.; Wang, X. A New Structure for Permanent-Magnet-Biased Axial Hybrid Magnetic Bearings. IEEE Trans. Magn. 2009, 45, 5319–5325. [Google Scholar]
- Schuhmann, T.; Hofmann, W.; Werner, R. Improving Operational Performance of Active Magnetic Bearings Using Kalman Filter. IEEE Trans. Magn. 2015, 59, 821–829. [Google Scholar]
- Bachovchin, K.D.; Hoburg, J.F.; Post, R.F. Magnetic Fields and Forces in Permanent Magnet Levitated Bearings. IEEE Trans. Magn. 2012, 48, 2112–2120. [Google Scholar] [CrossRef]
- Ji, L.; Xu, L.X.; Jin, C.W. Research on a Low Power Consumption Six-Pole Heteropolar Hybrid Magnetic Bearing. IEEE Trans. Magn. 2013, 49, 4918–4926. [Google Scholar] [CrossRef]
- Pichot, M.A.; Kajs, J.P.; Murphy, B.R.; Ouroua, A.; Rech, B.M.; Hayes, R.J.; Beno, J.H.; Buckner, G.D.; Palazzolo, A.B. Active magnetic bearings for energy storage systems for combat vehicles. IEEE Trans. Magn. 2001, 37, 318–323. [Google Scholar] [CrossRef]
- Han, B.C.; Zhen, S.Q.; Wang, X.; Yuan, Q. Integral Design and Analysis of Passive Magnetic Bearing and Active Radial Magnetic Bearing for Agile Satellite Application. IEEE Trans. Magn. 2012, 48, 1959–1966. [Google Scholar]
- Kim, S.H.; Shin, J.W.; Ishiyama, K. Magnetic Bearings and Synchronous Magnetic Axial Coupling for the Enhancement of the Driving Performance of Magnetic Wireless Pumps. IEEE Trans. Magn. 2014, 50, 4003404. [Google Scholar] [CrossRef]
- Kimman, M.H.; Langen, H.H.; Schmidt, R.H. A miniature milling spindle with active magnetic bearings. Mechatronics 2010, 20, 224–235. [Google Scholar] [CrossRef]
- Usman, I.; Paone, M.; Smeds, K.; Lu, X.D. Radially biased axial magnetic bearings/motors for precision rotary-axial spindles. IEEE/ASME Trans. Mechatronics 2011, 16, 411–420. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Zhu, H.Q. Key Technologies and Development Status of Flywheel Energy Storage System. Trans. China Electrotech. Soc. 2011, 26, 141–146. [Google Scholar]
- Schweitzer, G.; Maslen, E.; Okada, Y. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer Press: Berlin, Germany, 2009. [Google Scholar]
- Hsu, C.T.; Chen, S.L. Exact Linearization of a Voltage-Controlled 3-Pole Active Magnetic Bearing System. IEEE Trans. Control Syst. Technol. 2002, 10, 618–625. [Google Scholar]
- Chen, S.L.; Chen, S.H.; Yan, S.T. Experimental Validation of a Current-Controlled Three-Pole Magnetic Rotor-Bearing System. IEEE Trans. Magn. 2005, 41, 99–112. [Google Scholar] [CrossRef]
- Xie, Z.Y.; Zhu, H.Q.; Sun, Y.K. Structure and control of AC-DC three-degree-of-freedom hybrid magnetic bearing. In Proceedings of the 8th International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005; pp. 1801–1806.
- Yang, H.; Zhao, R.X.; Tang, Q.B. Study on inverter-fed three-pole active magnetic bearing. In Proceedings of Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 19–23 March 2006; pp. 1576–1581.
- Zhang, W.Y.; Zhu, H.Q. A novel modeling method for radial suspension forces of AC magnetic bearings. Chin Sci Bull (Chin Ver) 2012, 57, 976–986. [Google Scholar]
- Zhang, Y.P.; Liu, S.Q.; Li, H.W.; Fan, Y.P. Calculation of Radial Electromagnetic Force of Axial Hybrid Magnetic Bearing Based on Magnetic Circuit Analysis. Trans. China Electrotech. Soc. 2012, 27, 137–142. [Google Scholar]
- Han, B.C.; Zheng, S.Q.; Le, Y.; Xu, S. Modeling and Analysis of Coupling Performance between Passive Magnetic Bearing and Hybrid Magnetic Radial Bearing for Magnetically Suspended Flywheel. IEEE Trans. Magn. 2013, 49, 5356–5370. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Zhu, H.Q. Influence of eddy effect to the parameter design and optimized design for magnetic bearing. Electr. Mach. Control 2012, 16, 67–77. [Google Scholar]
- Kang, K.; Palazzolo, A. Homopolar Magnetic Bearing Saturation Effect on Rotating Machinery Vibration. IEEE Trans. Magn. 2012, 48, 1984–1994. [Google Scholar] [CrossRef]
- Wang, X.G.; Bin, M. Study on the Centripetal Effect of a Magnetic Bearing. In Proceeding of International Conference Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 2135–2138.
- Zhang, Y.P.; Xue, B.W.; Liu, S.Q.; Li, H.W. Calculation of electromagnetic force of axial hybrid magnetic bearing based on fringe effect of magnetic flux. Electr. Mach. Control 2014, 18, 54–67. [Google Scholar]
- Huang, L.; Zhao, G.Z.; Nian, H.; He, Y.K. Modeling and design of permanent magnet biased radial-axial magnetic bearing by extended circuit theory. In Proceeding of International Conference on Electrical Machines and Systems, Seoul, Korea, 8–11 October 2007; pp. 1502–1507.
- Lu, J.Y.; Ma, W.M.; Li, L.R. Research on Longitudinal End Effect of High Speed Long Primary Double-sided Linear Induction Motor. Chin. Soc. Elec. Eng. 2008, 28, 73–78. [Google Scholar]
- Xia, T.W.; Ding, M.D. Electronmechanics, China; China Machine Press: Beijing, China, 2011; pp. 79–87. [Google Scholar]
- Liu, X.X.; Dong, J.Y.; Du, Y.; Shi, K.; Mo, L.H. Design and Static Performance Analysis of a Novel Axial Hybrid Magnetic Bearing. IEEE Trans. Magn. 2014, 50, 8300404. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Outer diameter of rotor | 19 mm |
| Inner diameter of rotor | 9 mm |
| Outer diameter of stator yoke | 64 mm |
| Inner diameter of stator yoke | 40 mm |
| Inner diameter of permanent magnet | 53.4 mm |
| Inner diameter of Permanent magnet | 64 mm |
| Axial length of pole | 10 mm |
| Axial length of rotor | 25 mm |
| Thickness of permanent magnet | 2.5 mm |
| Arc length of pole | π/2 rad |
| Length of air gap | 0.5 mm |
| Turns of coil | 100 At |
| Cross-sectional area of permanent magnet | 265 mm2 |
| Saturation magnetic flux | 0.9 T |
| Outer diameter of rotor | 19 mm |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Ding, S.; Jv, J. Modeling for Three-Pole Radial Hybrid Magnetic Bearing Considering Edge Effect. Energies 2016, 9, 345. https://doi.org/10.3390/en9050345
Zhu H, Ding S, Jv J. Modeling for Three-Pole Radial Hybrid Magnetic Bearing Considering Edge Effect. Energies. 2016; 9(5):345. https://doi.org/10.3390/en9050345
Chicago/Turabian StyleZhu, Huangqiu, Shuling Ding, and Jintao Jv. 2016. "Modeling for Three-Pole Radial Hybrid Magnetic Bearing Considering Edge Effect" Energies 9, no. 5: 345. https://doi.org/10.3390/en9050345