
A High-Performance Adaptive Incremental Conductance MPPT Algorithm for Photovoltaic Systems

Abstract
:1. Introduction
2. Analysis of the Photovoltaic (PV) System
2.1. PV Model
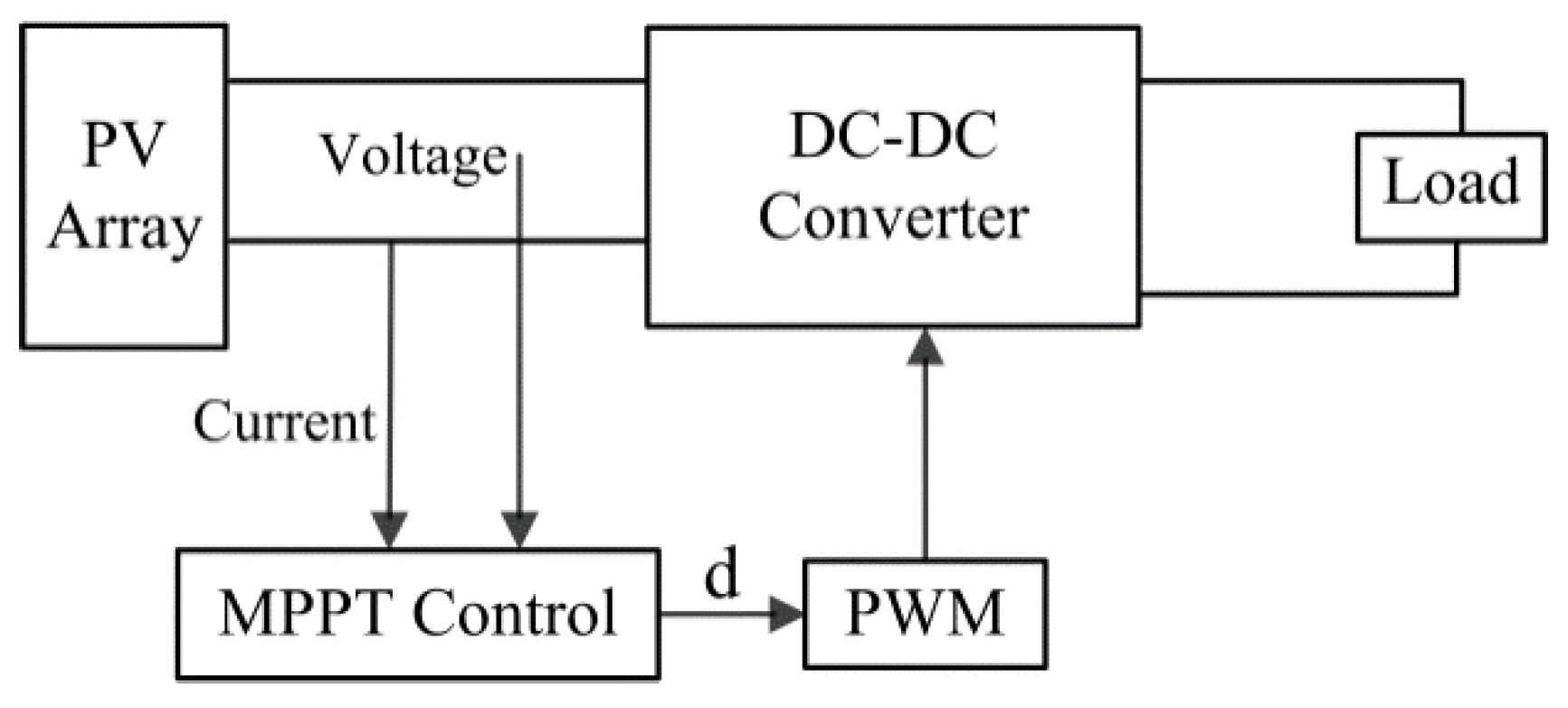
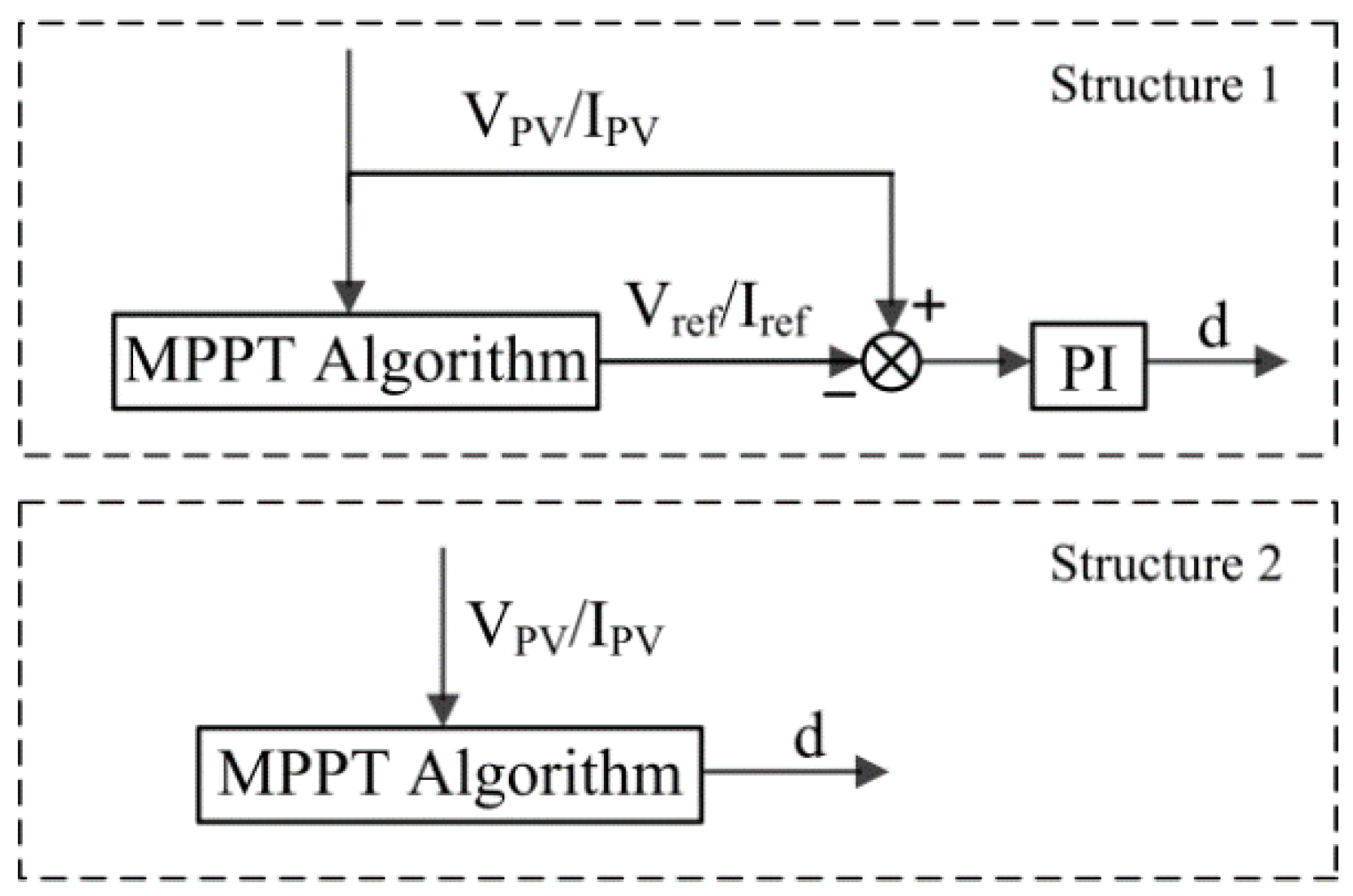
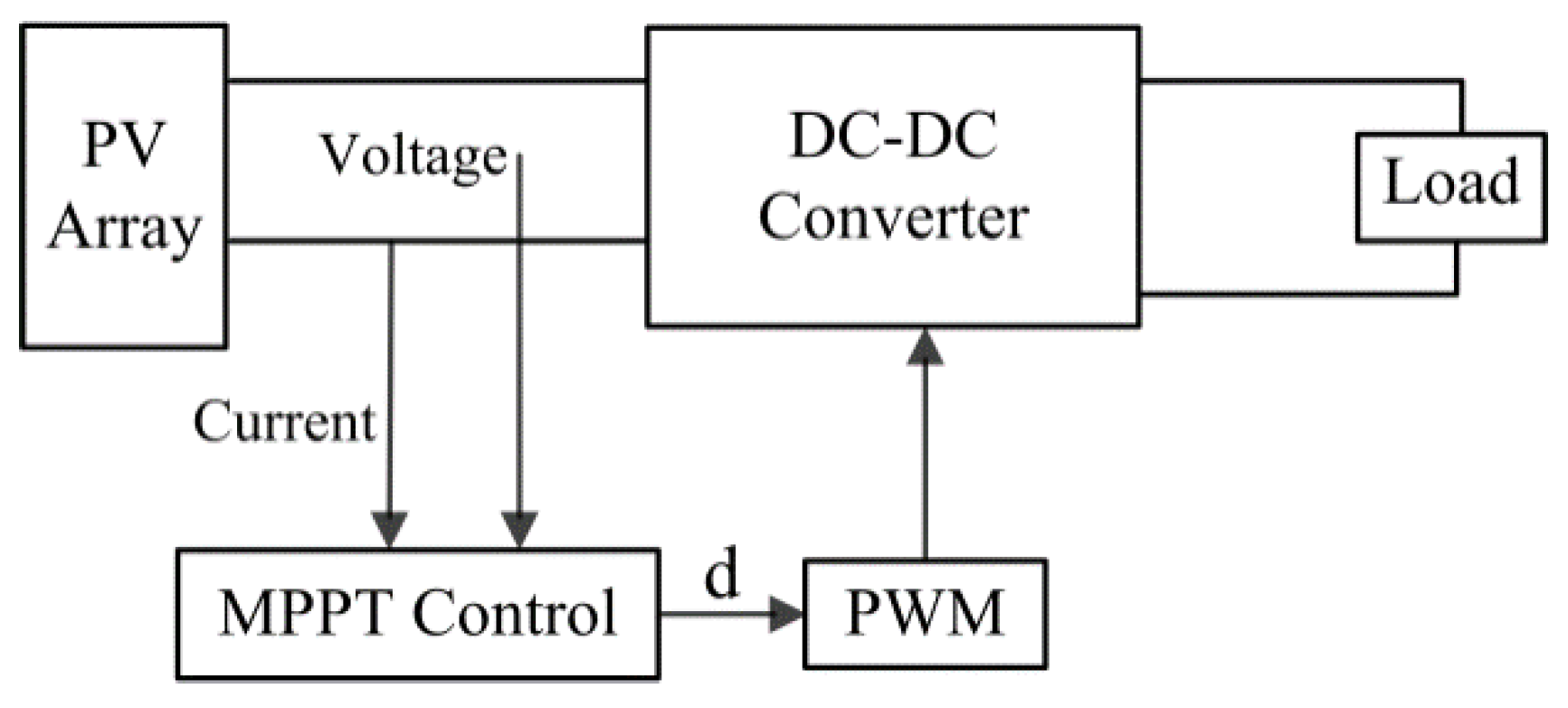
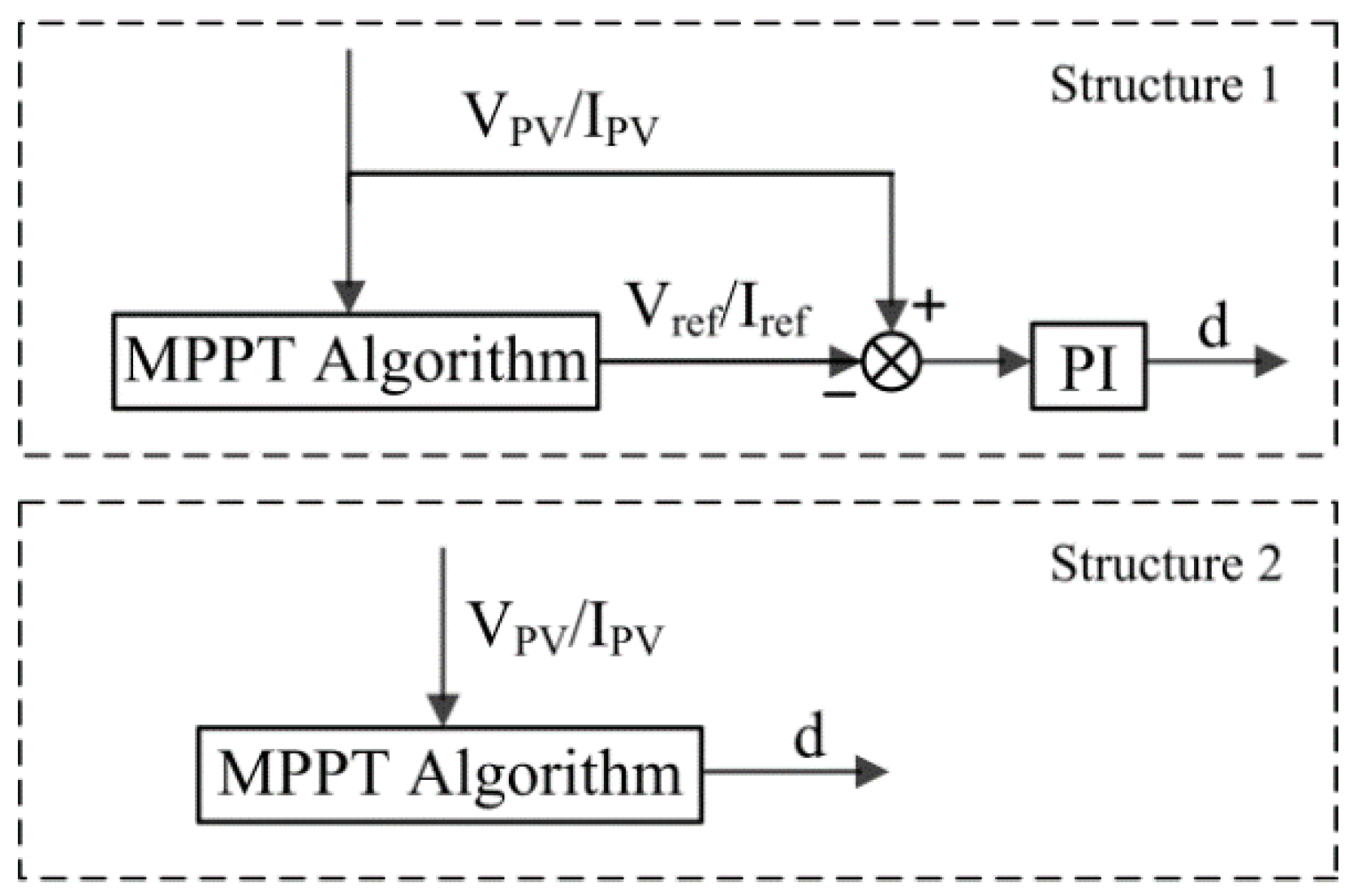
2.2. MPPT Control Unit
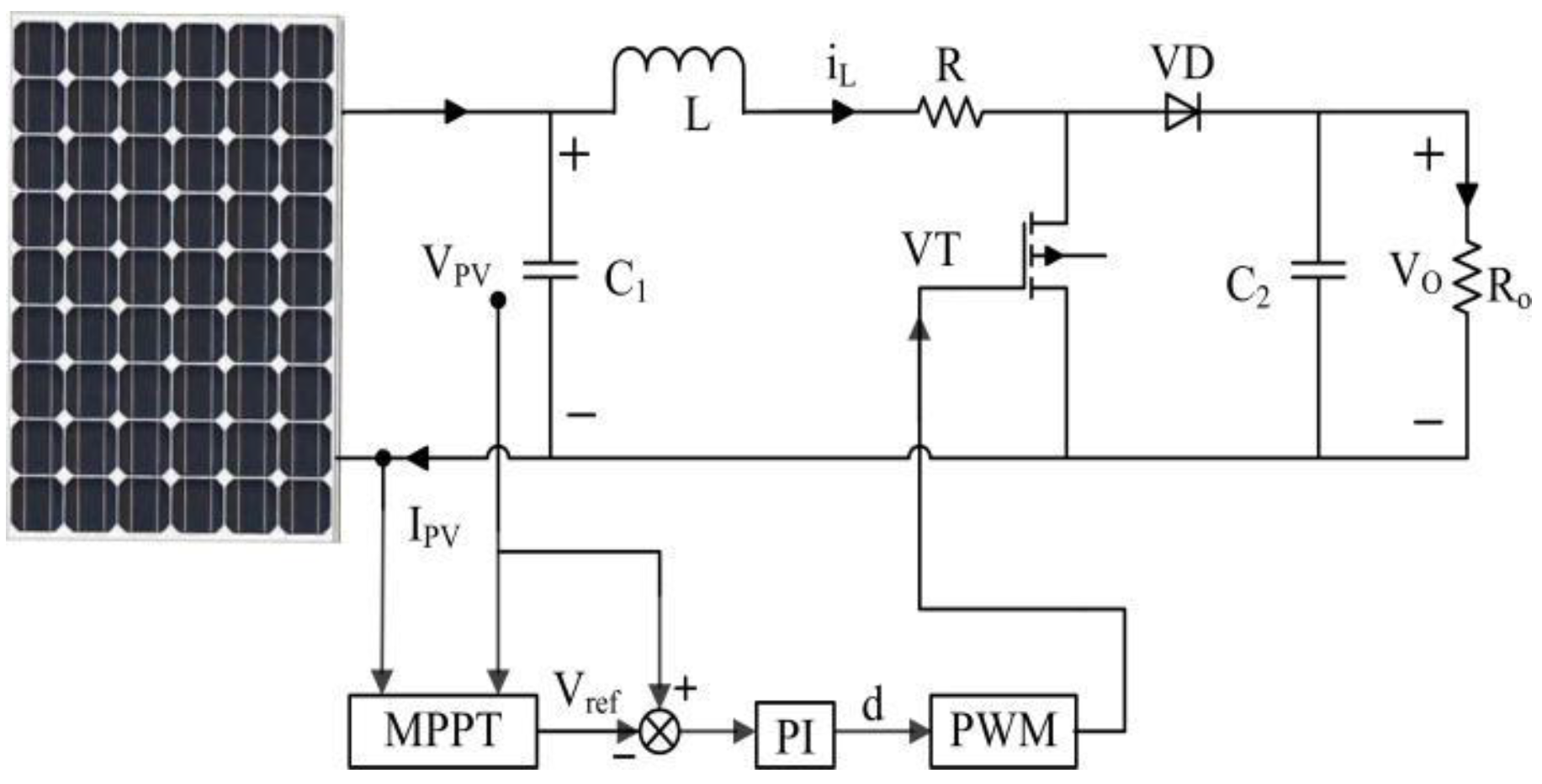
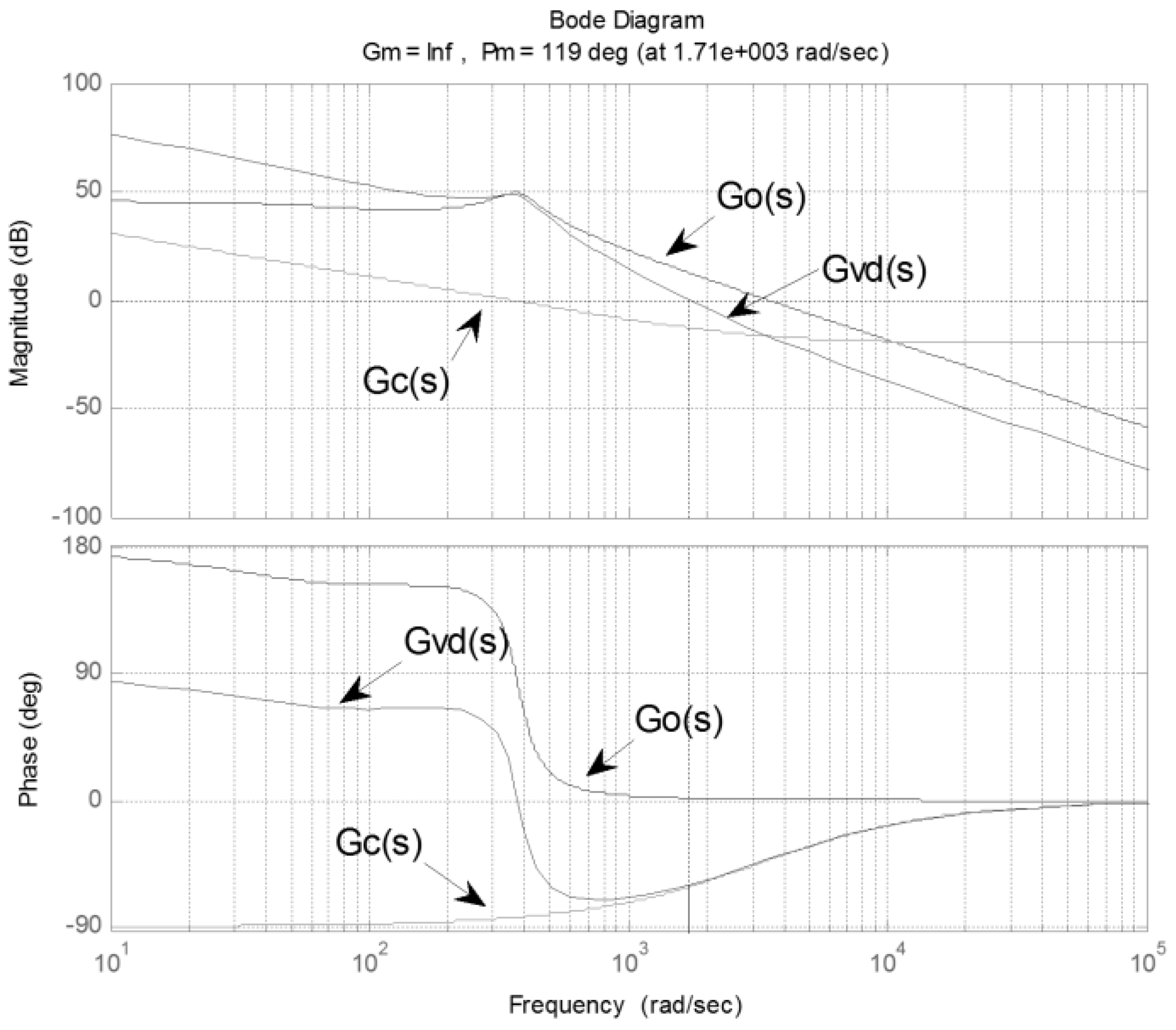
2.3. DC-DC Converter Analysis
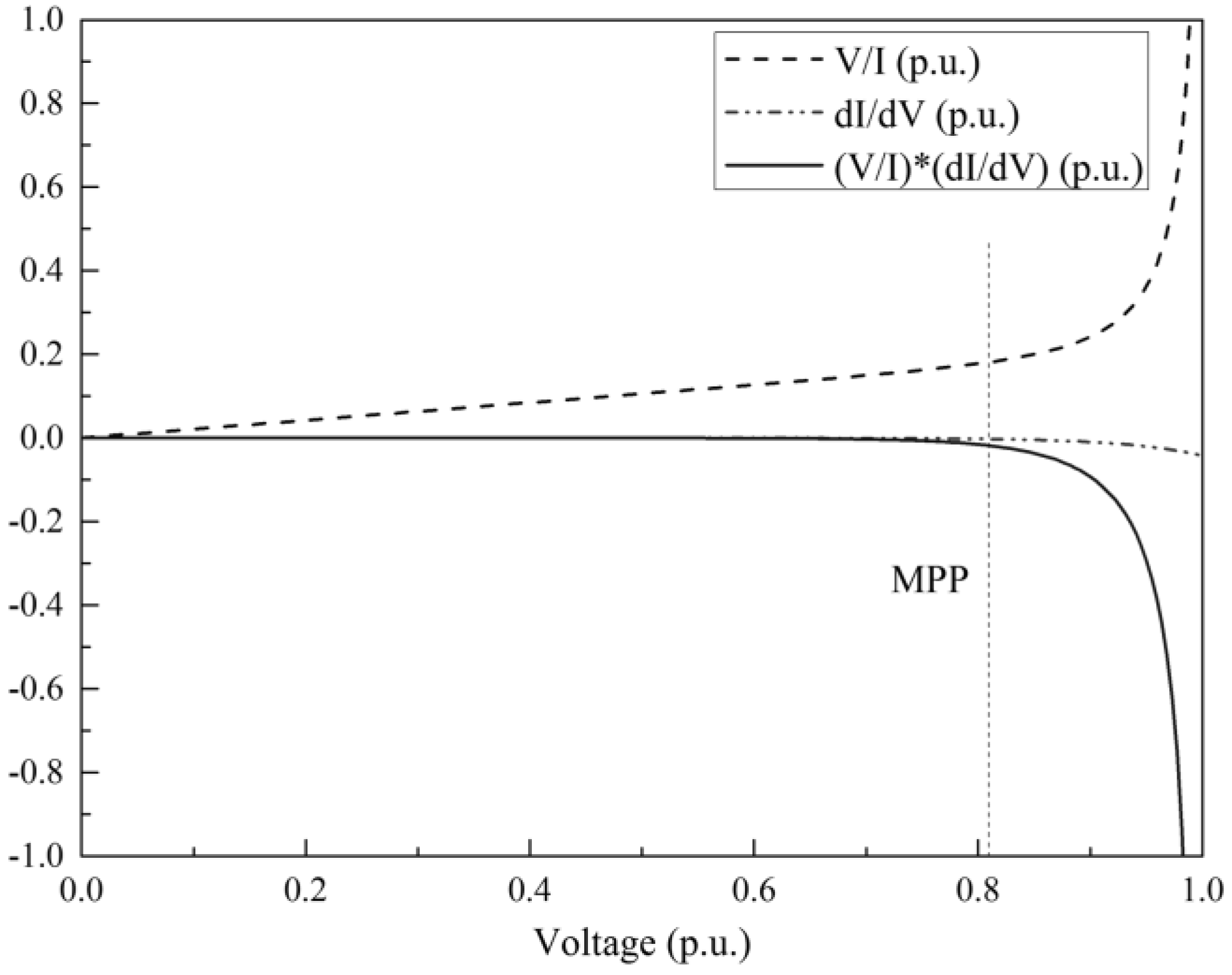
3. MPPT Algorithm
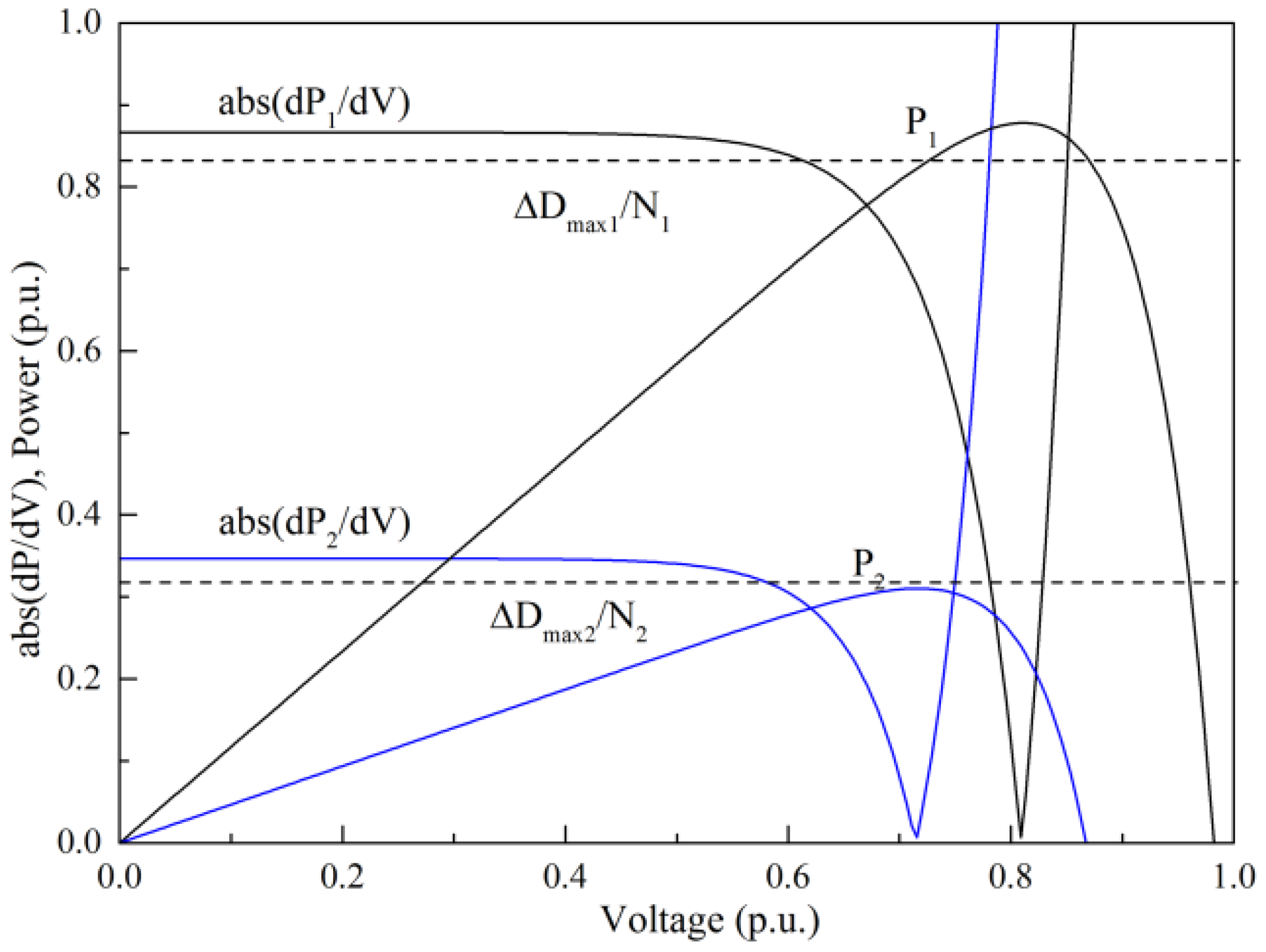
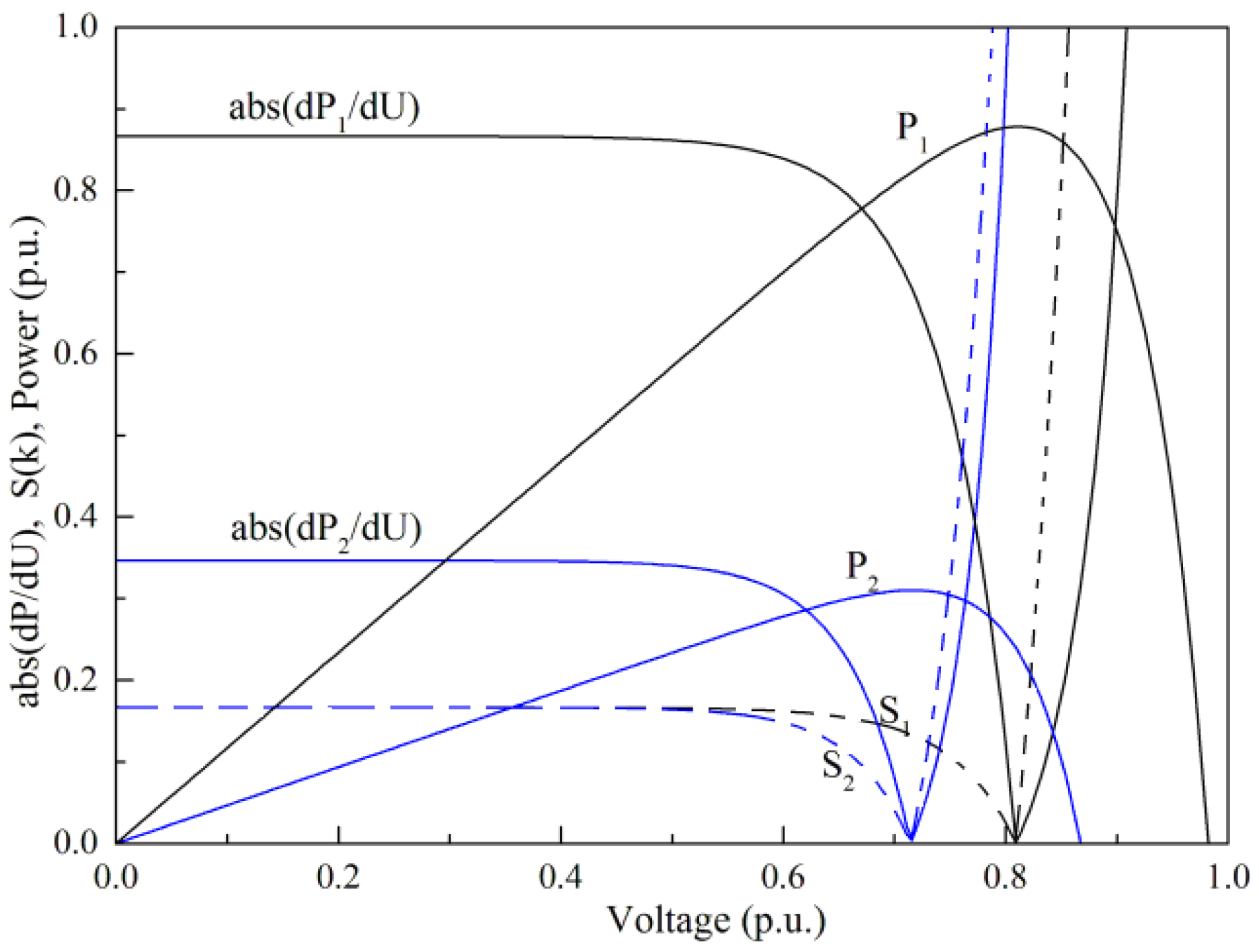
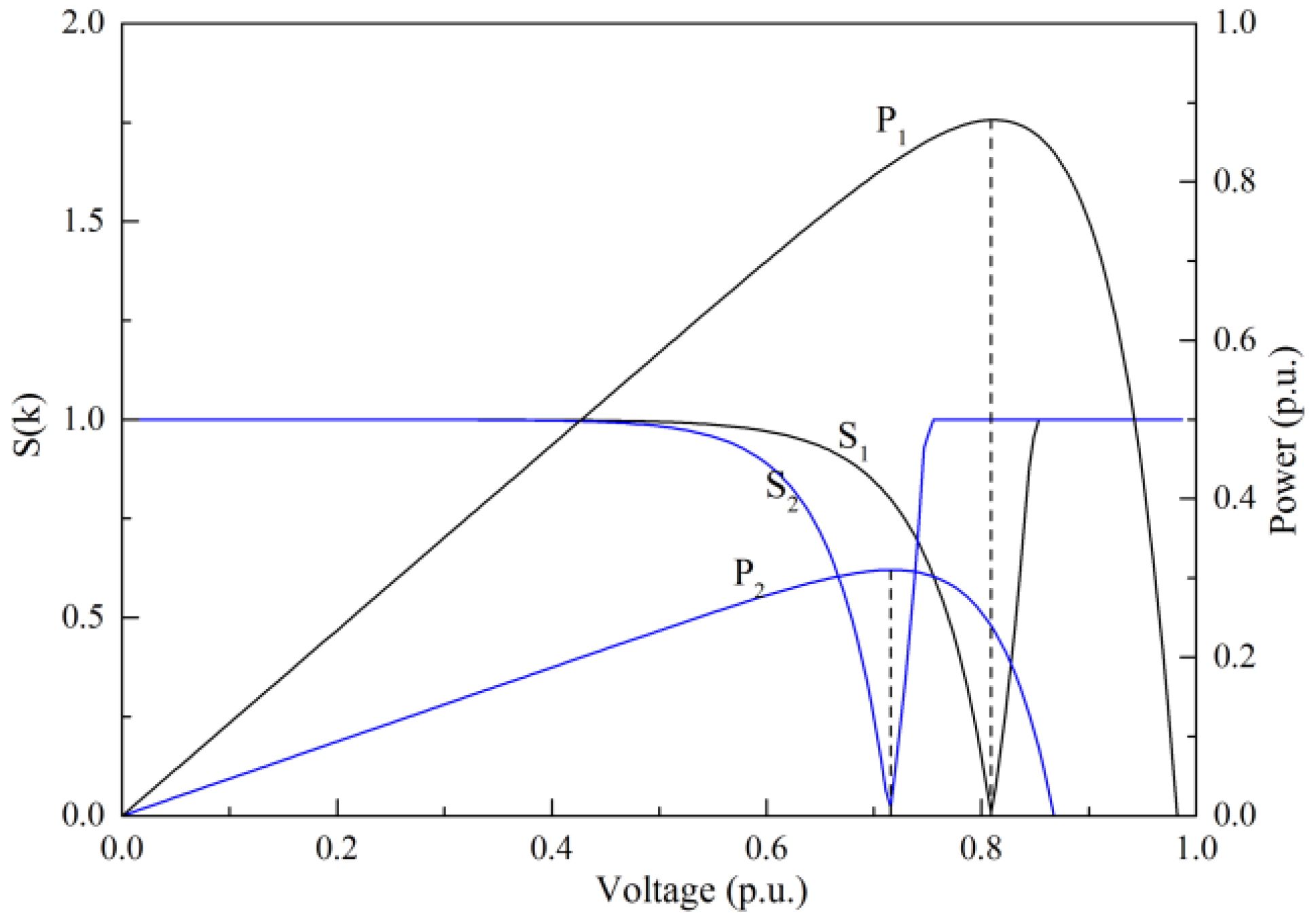
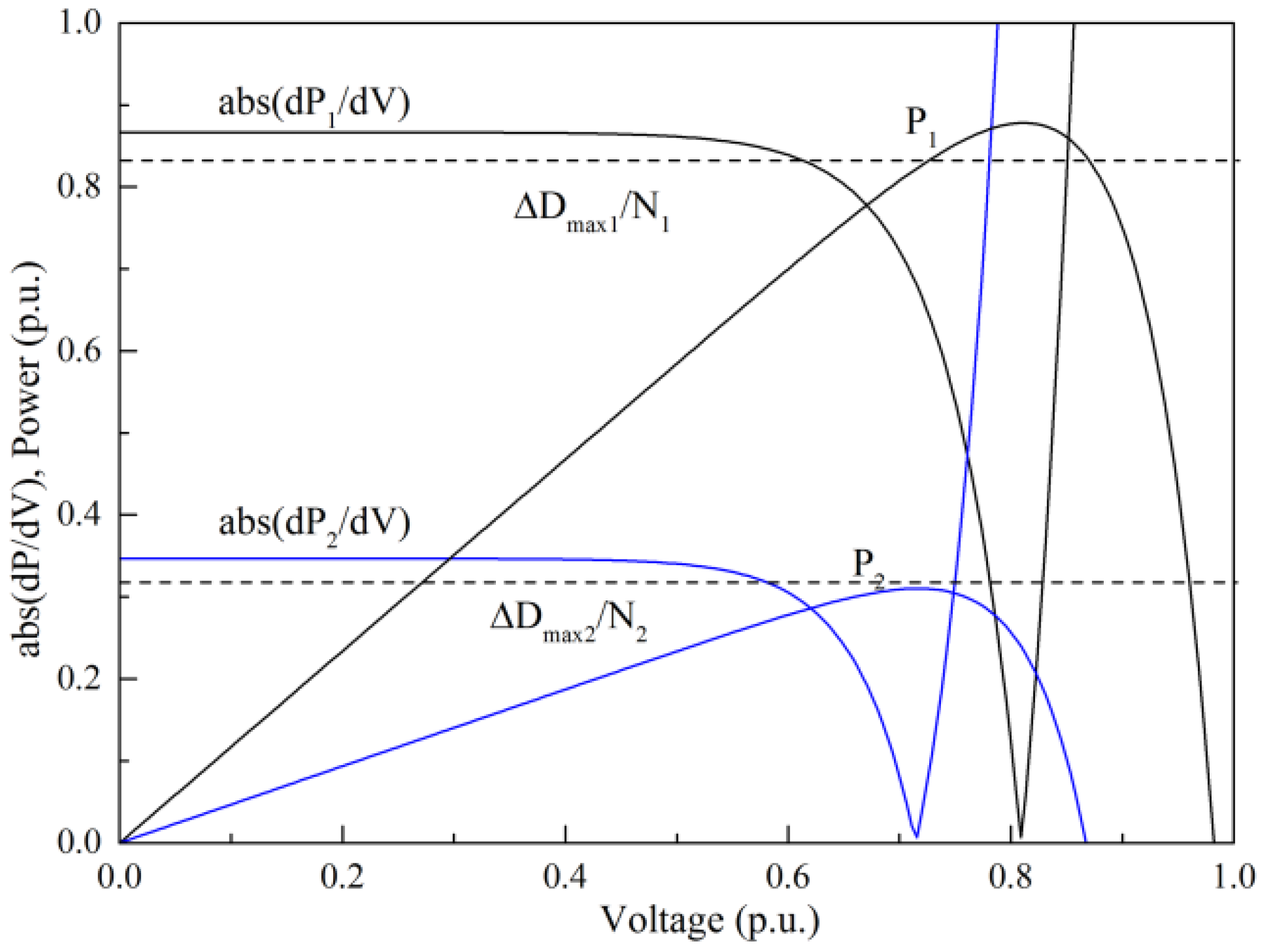
3.1. Variable Step Size Method
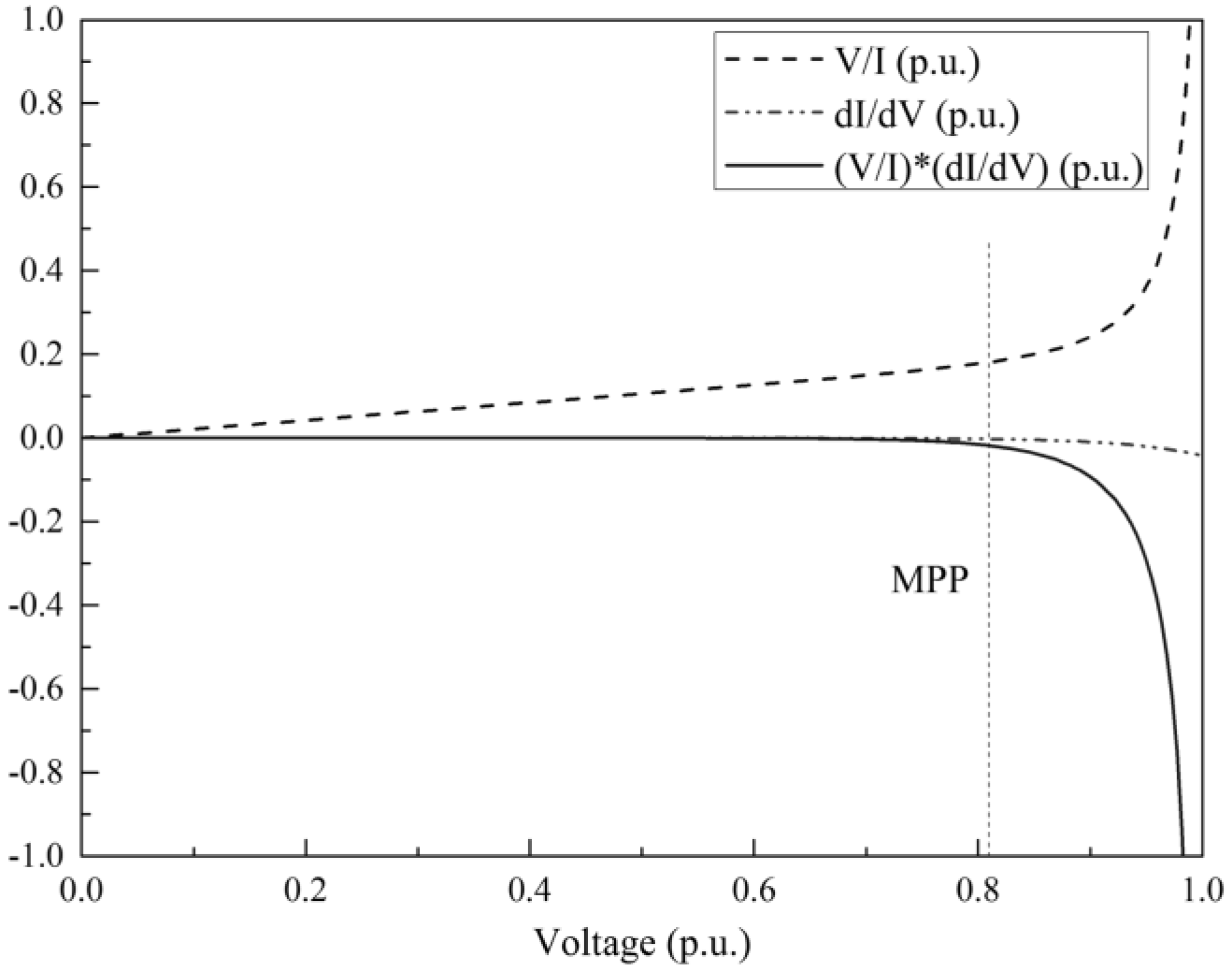
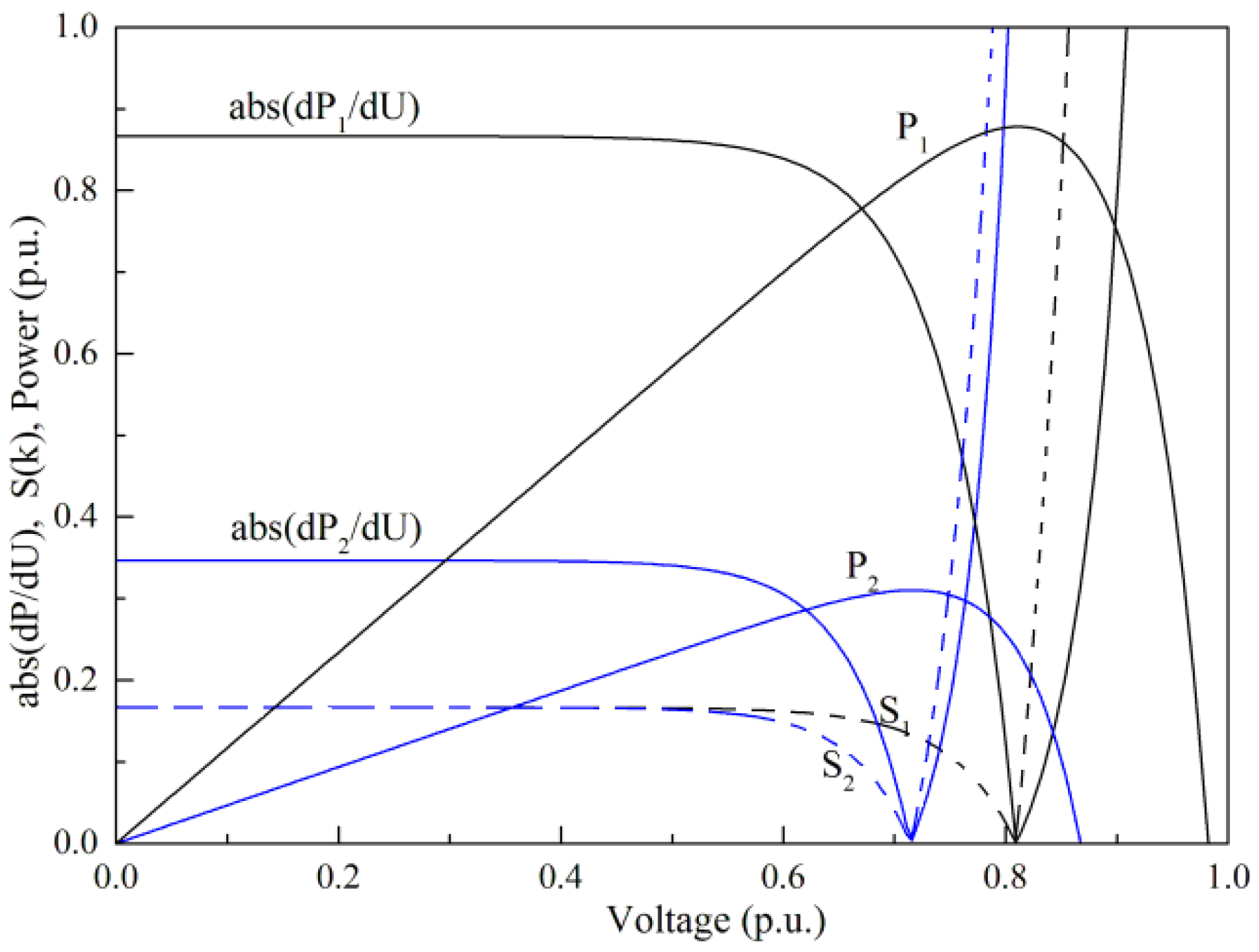
3.2. Proposed Methods
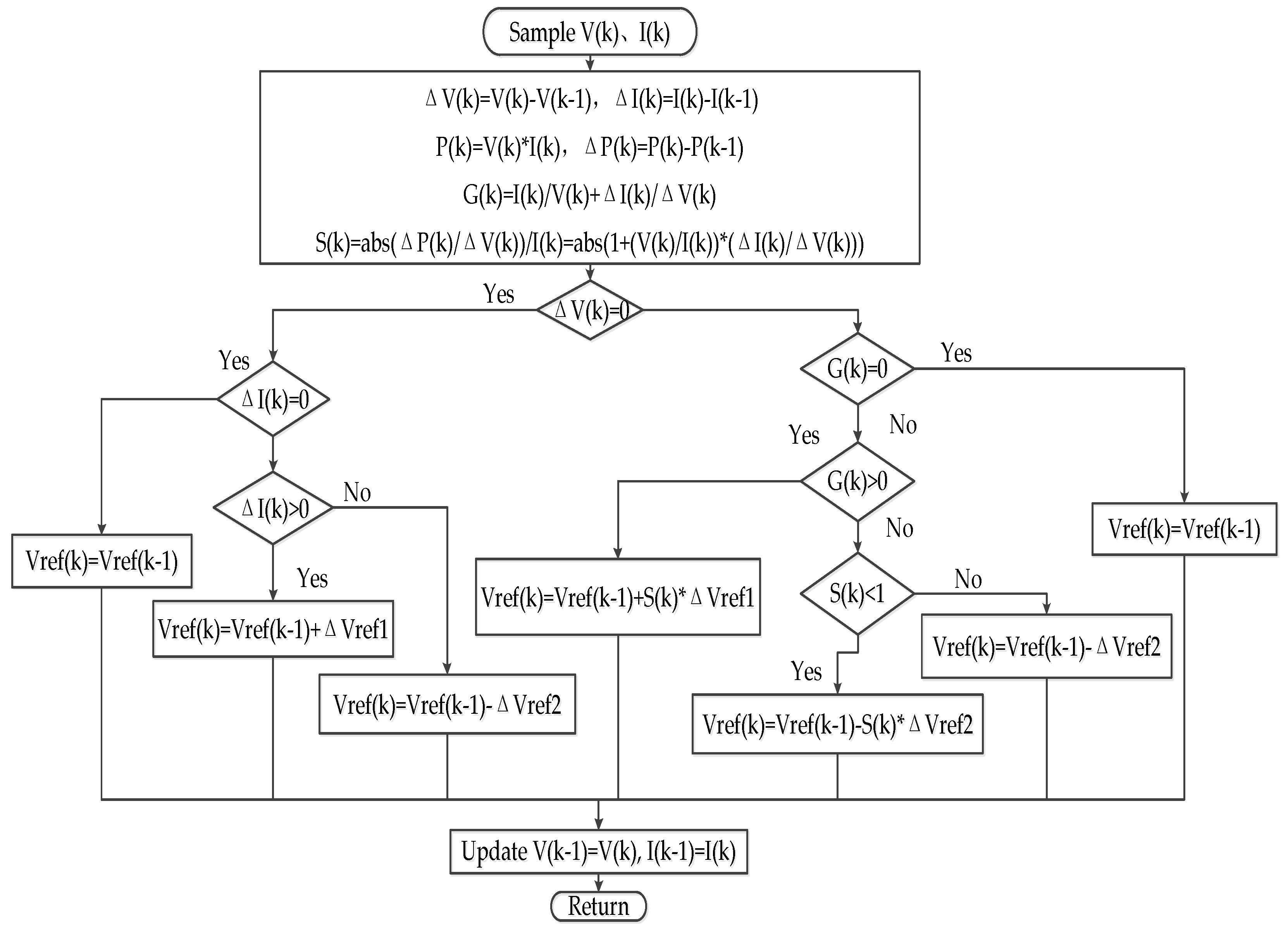
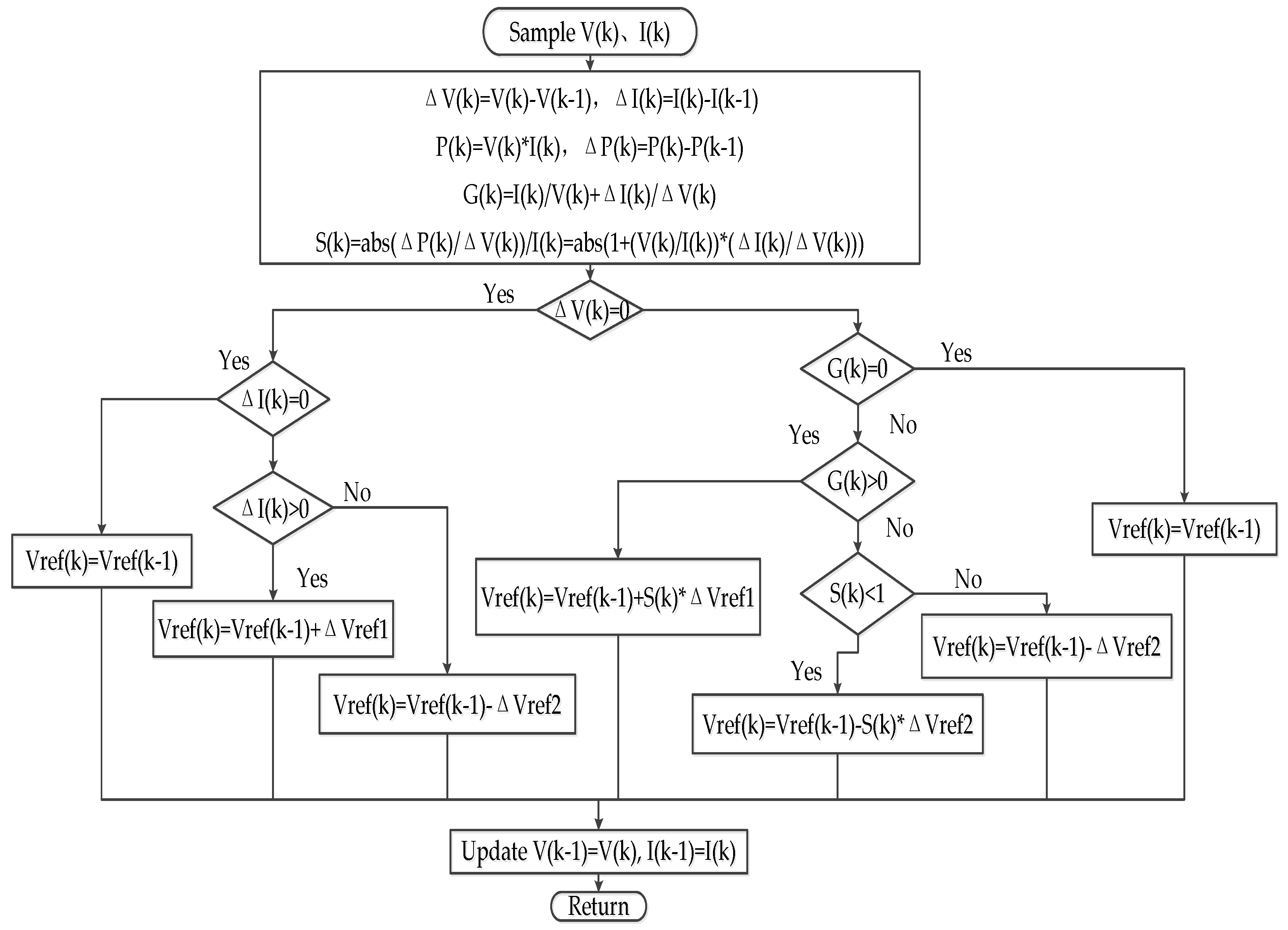
3.3. Realization of the Proposed Algorithm
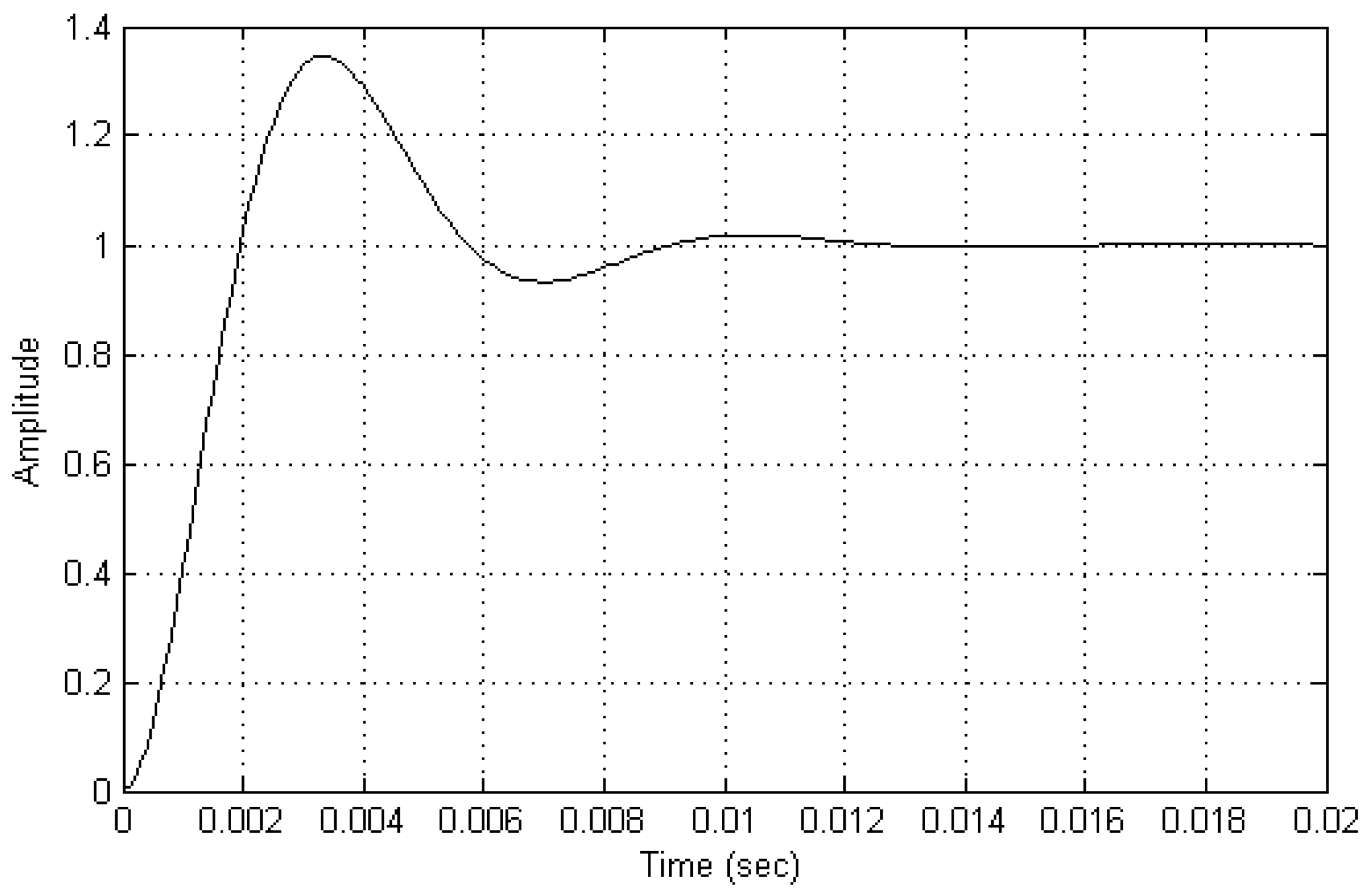
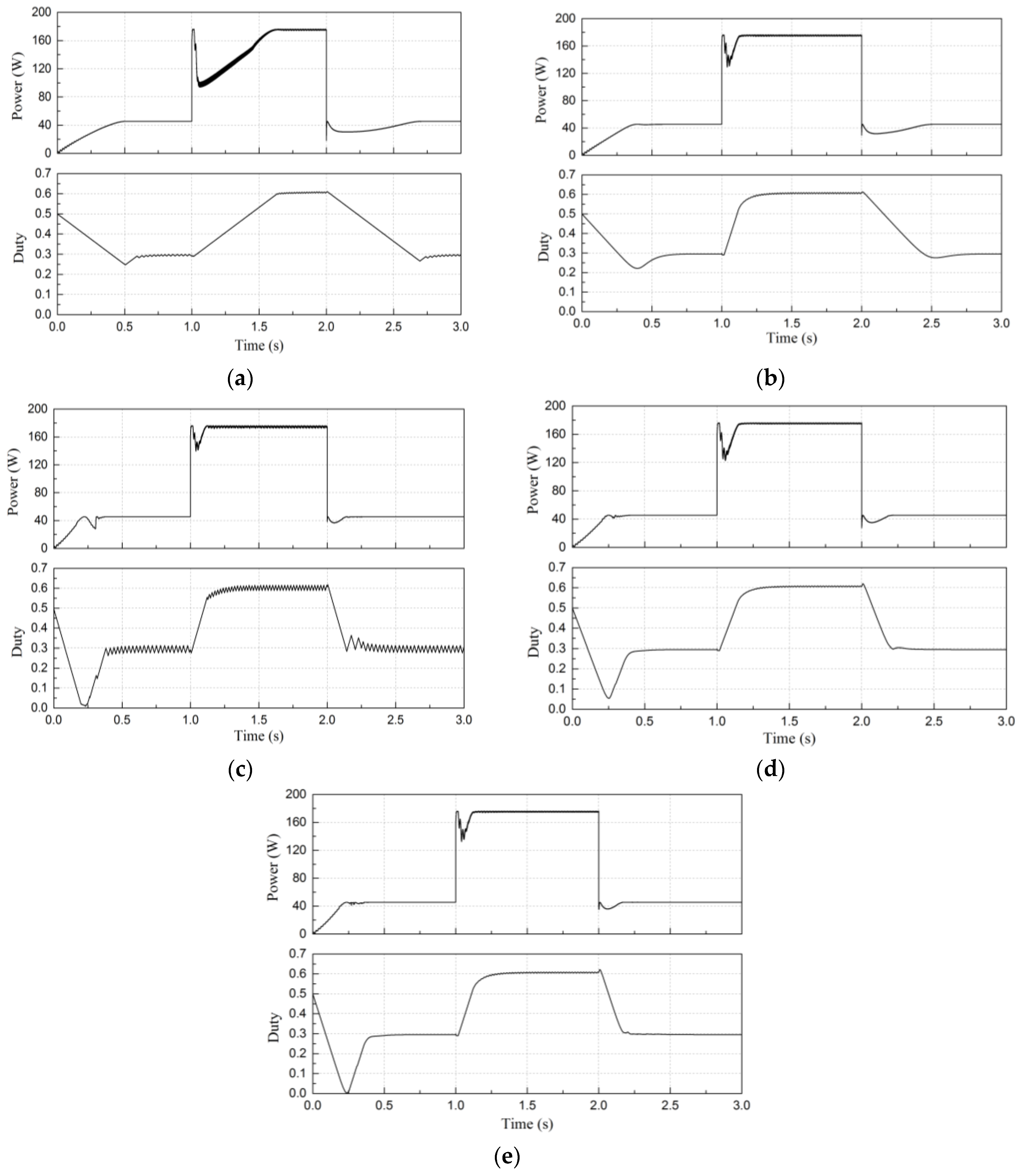
4. Simulation Analysis
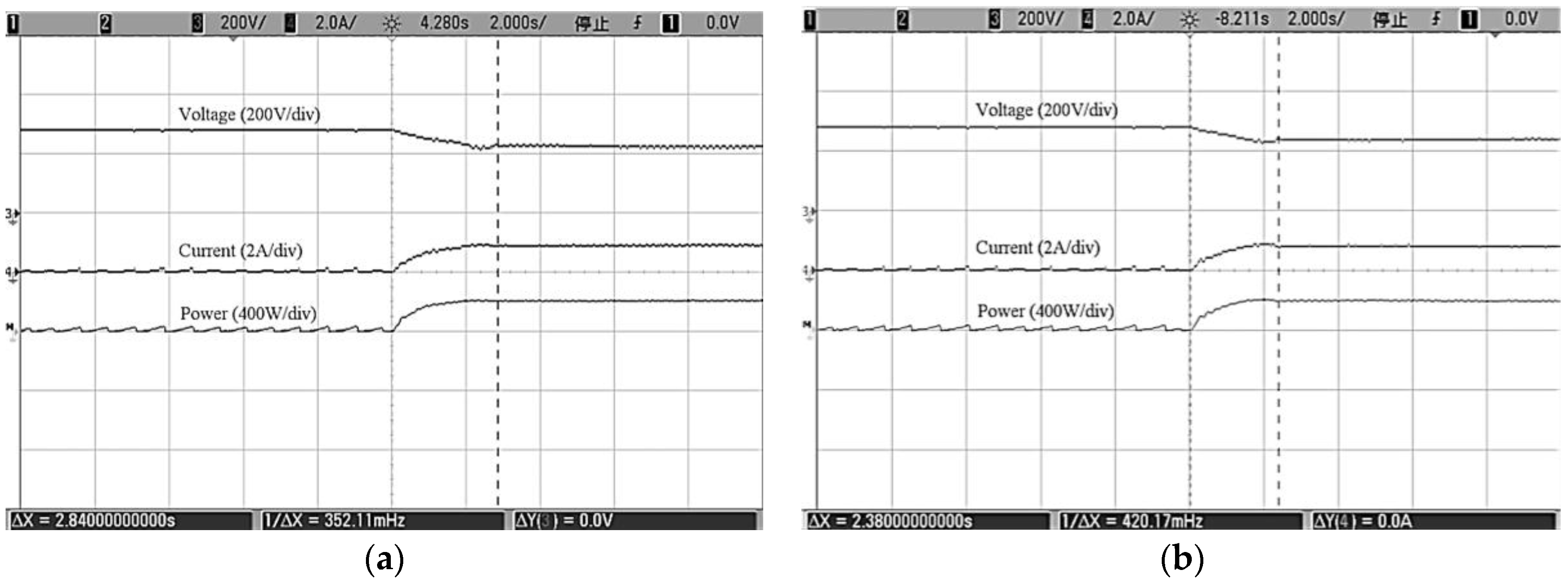
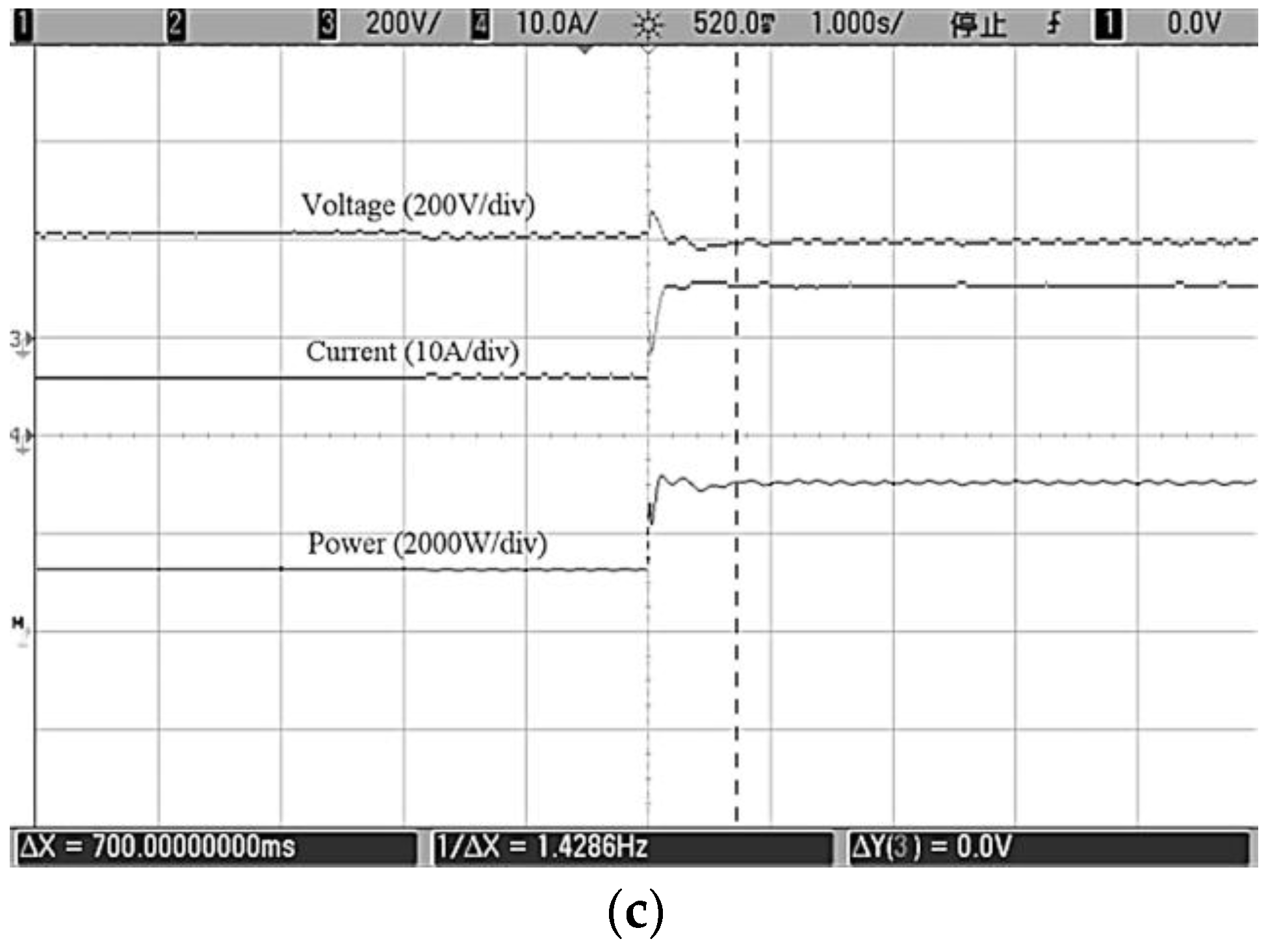
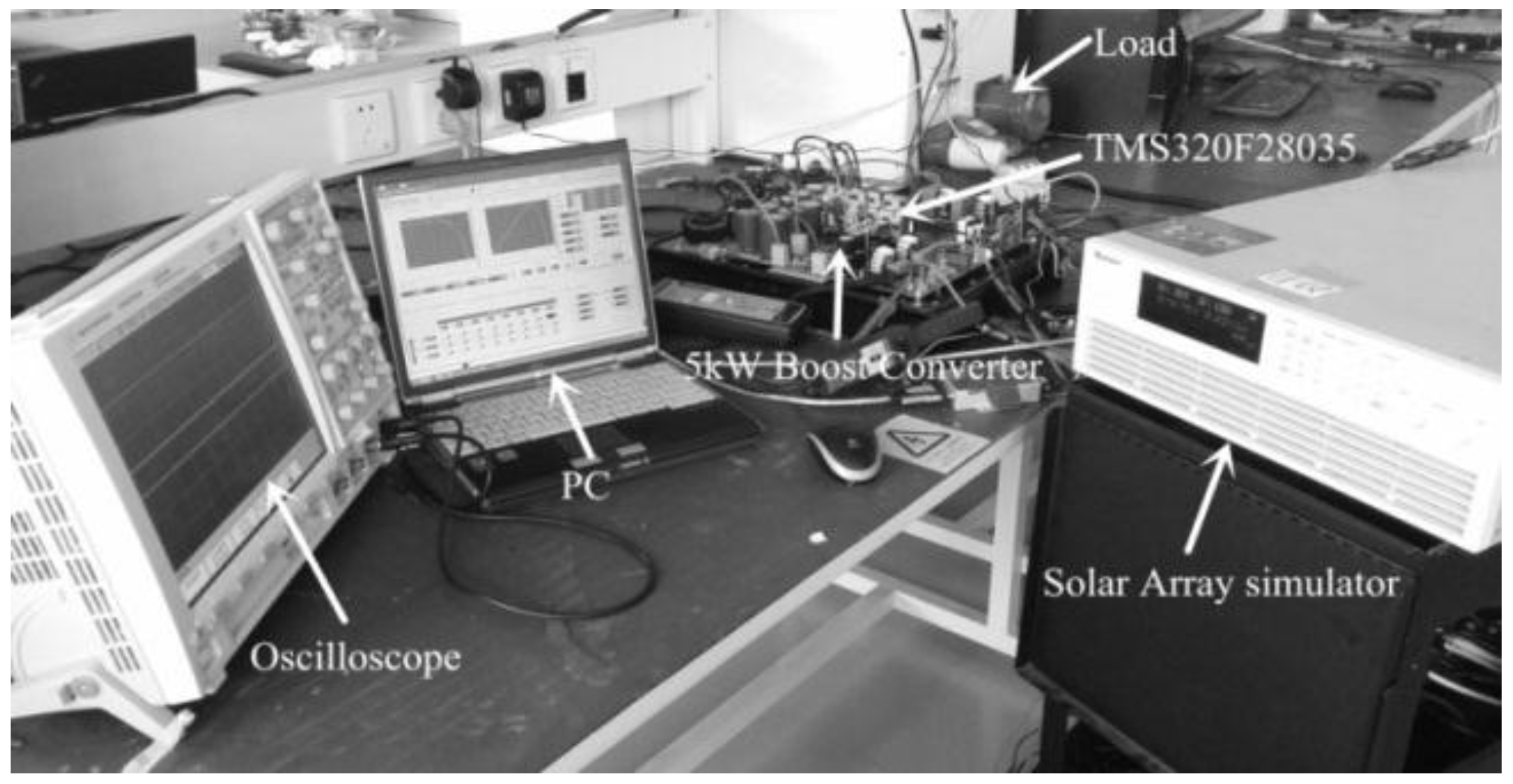
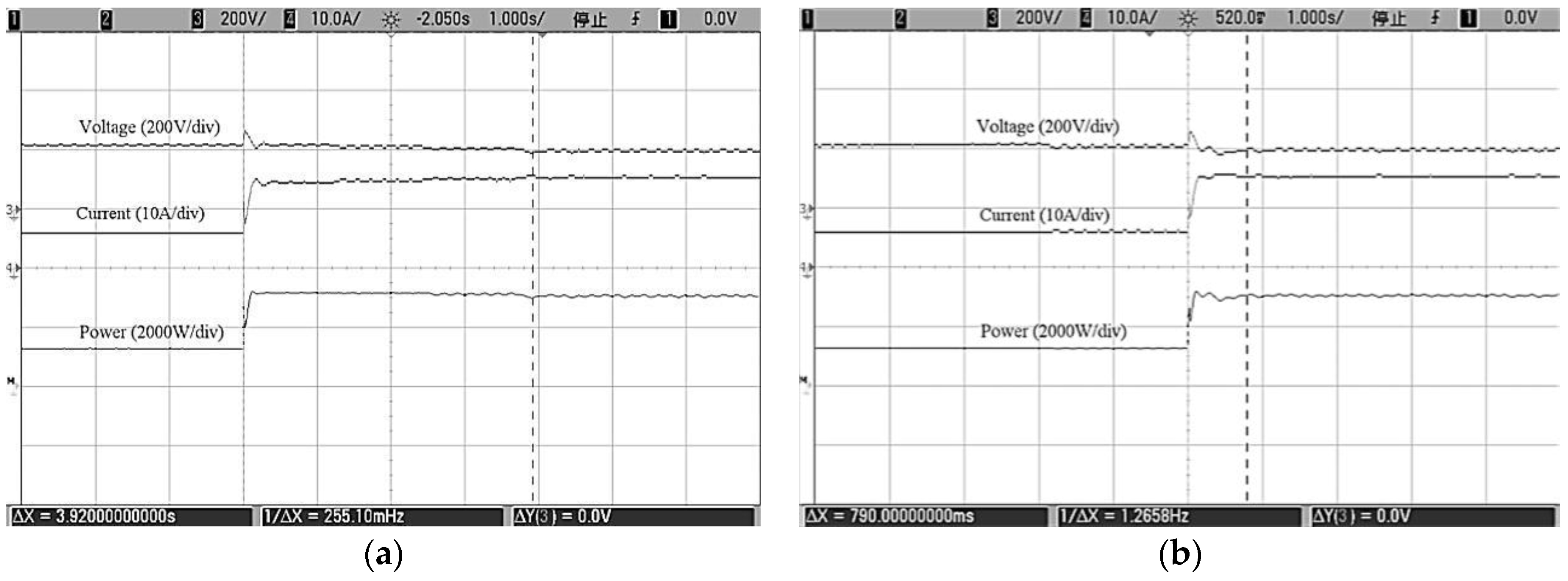
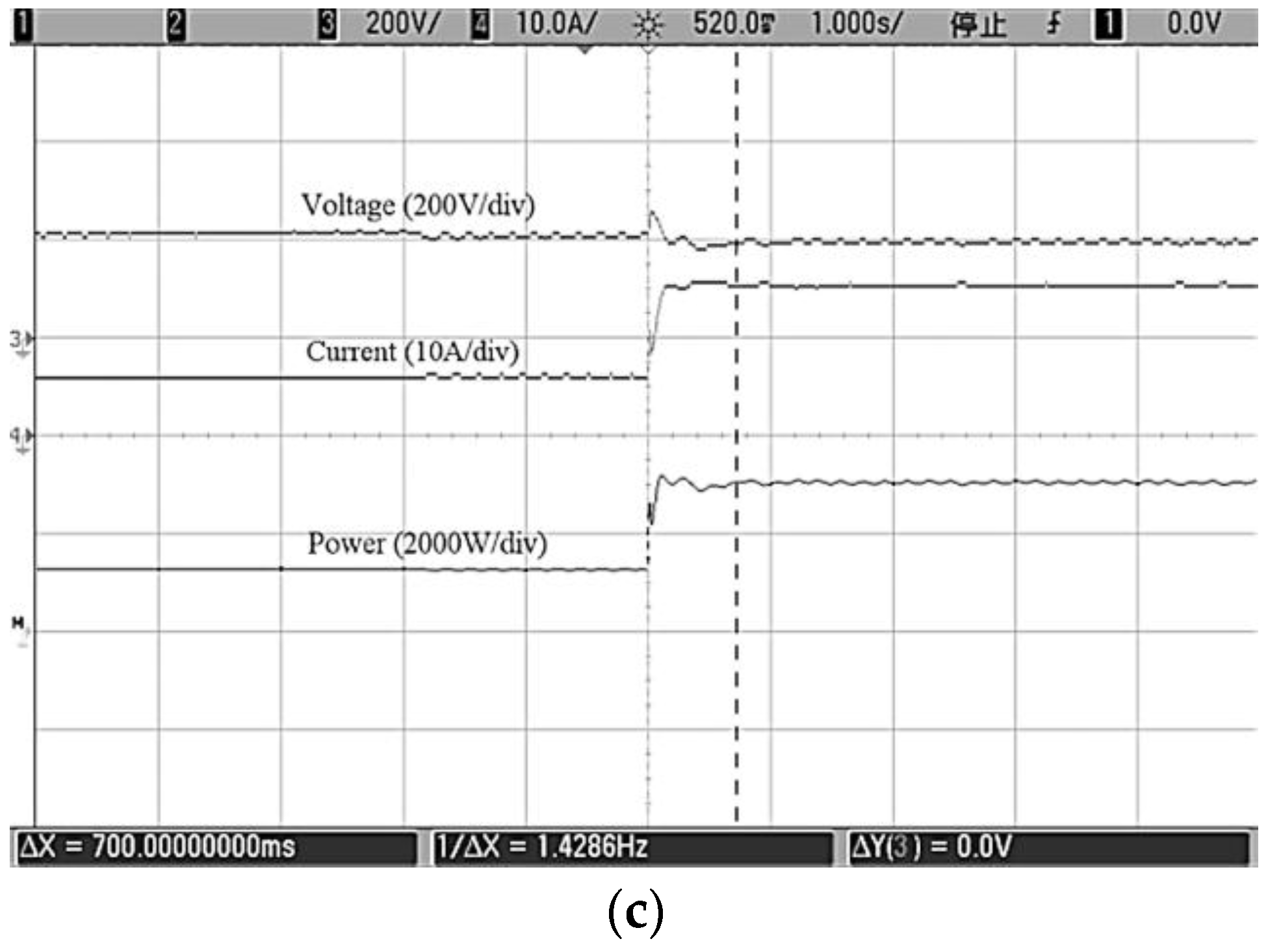
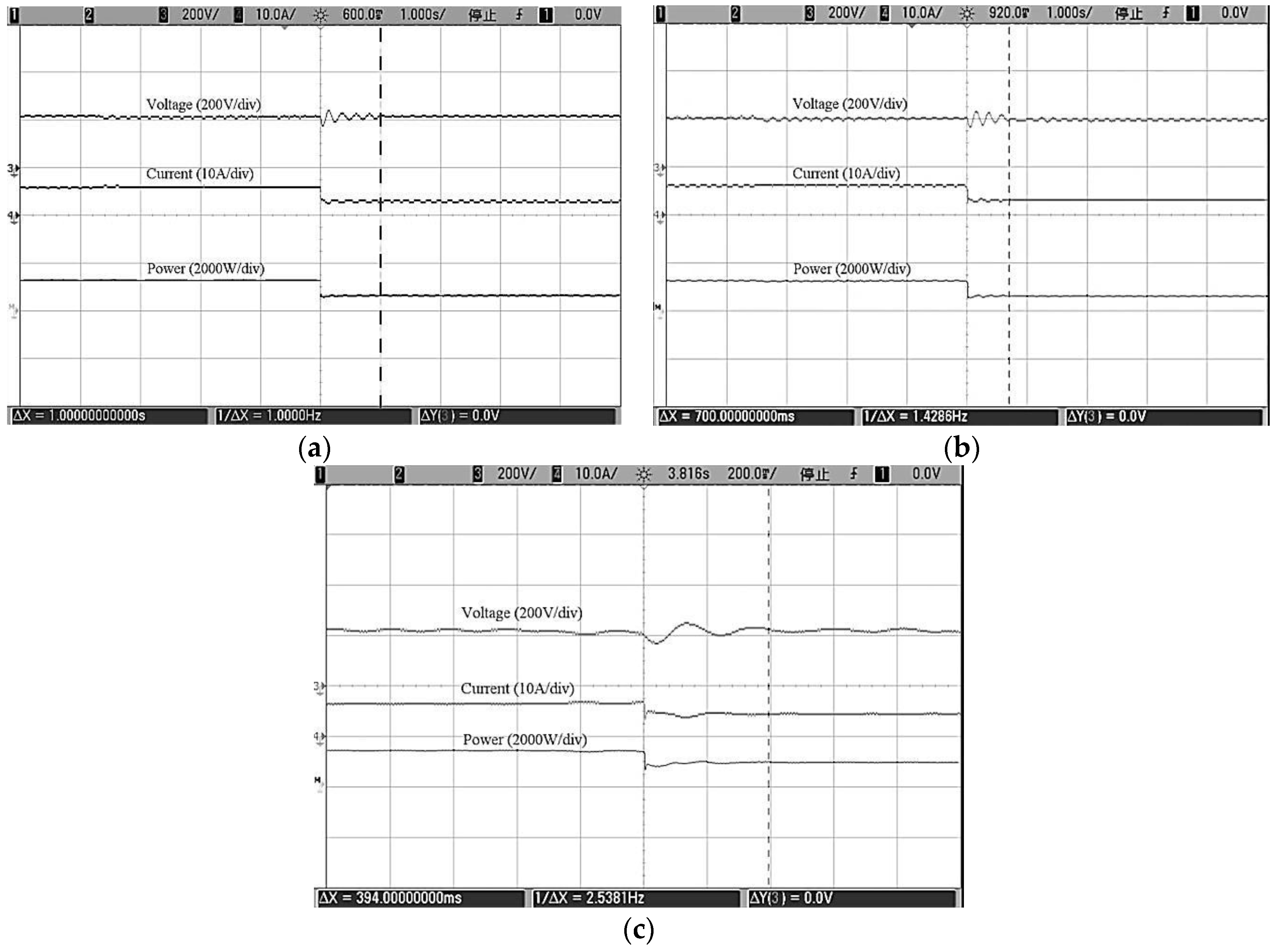
5. Experiment Results
- Traditional variable step size INC: N = 1, ΔVrefmax = 4.8 V.
- Proposed method with equal initial step sizes: ΔVref1 = ΔVref2 = 4.8 V.
- Propose method with initial step sizes that satisfy Equation (20): ΔVref1 = 4.8 V, ΔVref2 = 1.6 V.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kwon, J.M.; Nam, K.H.; Kwon, B.H. Photovoltaic power conditioning system with line connection. IEEE Trans. Ind. Electron. 2006, 53, 1048–1054. [Google Scholar] [CrossRef]
- Chao, K.H. A high performance PSO-based global MPP tracker for a PV power generation system. Energies 2015, 8, 6841–6858. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Sivakumar, P.; Kader, A.A.; Kaliavaradhan, Y.; Arutchelvi, M. Analysis and enhancement of PV efficiency with incremental conductance MPPT technique under non-linear loading conditions. Renew. Energy 2015, 81, 543–550. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. A novel adaptive P&O MPPT algorithm considering sudden changes in the irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. High-performance adaptive perturb and observe MPPT technique for photovoltaic-based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Piegari, L.; Rizzo, R.; Spina, I.; Tricoli, P. Optimized adaptive perturb and observe maximum power point tracking control for photovoltaic generation. Energies 2015, 8, 3418–3436. [Google Scholar] [CrossRef]
- Petrone, G.; Spagnuolo, G.; Teodorescu, R.; Veerachary, M.; Vitelli, M. Reliability issues in photovoltaic power processing systems. IEEE Trans. Ind. Electron. 2008, 55, 2569–2580. [Google Scholar] [CrossRef]
- Cheng, P.C.; Peng, B.R.; Liu, Y.H.; Cheng, Y.S.; Huang, J.W. Optimization of a fuzzy-logic-control-based MPPT algorithm using the particle swarm optimization technique. Energies 2015, 8, 5338–5360. [Google Scholar] [CrossRef]
- Mamarelis, E.; Petrone, G.; Spagnuolo, G. Design of a sliding-mode-controlled SEPIC for PV MPPT applications. IEEE Trans. Ind. Electron. 2014, 61, 3387–3398. [Google Scholar] [CrossRef]
- Ruddin, S.; Karatepe, E.; Hiyama, T. Artificial neural network-polar coordinated fuzzy controller based maximum power point tracking control under partially shaded conditions. IET Renew. Power Gener. 2009, 3, 239–253. [Google Scholar]
- Pandey, A.; Dasgupta, N.; Mukerjee, A.K. High-performance algorithms for drift avoidance and fast tracking in solar MPPT system. IEEE Trans. Energy Convers. 2008, 23, 681–689. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Mei, Q.; Shan, M.; Liu, L.; Guerrero, J.M. A novel improved variable step-size incremental-resistance MPPT method for PV systems. IEEE Trans. Ind. Electron. 2011, 58, 2427–2434. [Google Scholar] [CrossRef]
- Chen, Y.; Lai, Z.; Liang, R. A novel auto-scaling variable step-size MPPT method for a PV system. Sol. Energy 2014, 102, 247–256. [Google Scholar] [CrossRef]
- Faraji, R.; Rouholamini, A.; Naji, H.R.; Fadaeinedjad, R.; Chavoshian, M.R. FPGA-based real time incremental conductance maximum power point tracking ccontroller for photovoltaic systems. IET Power Electron. 2014, 7, 1294–1304. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified incremental conductance MPPT algorithm to mitigate inaccurate responses under fast-changing solar irradiation level. Sol. Energy 2014, 101, 333–342. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Assessment of the incremental conductance maximum power point tracking algorithm. IEEE Trans. Sustain. Energy 2013, 4, 108–117. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer: Berlin, Germany, 2001. [Google Scholar]
- Xiao, W.; Dunford, W.G. A modified adaptive hill climbing MPPT method for photovoltaic power systems. In Proceedings of the IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; Volume 3, pp. 1957–1963.
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Power Electronics and Control Techniques for Maximum Energy Harvesting in Photovoltaic Systems; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Parameters | Value |
|---|---|
| Open-circuit Voltage VOC | 300 V |
| Short-circuit Current ISC | 0.9 A |
| Voltage at the MPP VMPP | 223 V |
| Current at the MPP IMPP | 0.8 A |
| Maximum Power P | 178.4 W |
| Input Filter Conductor C1 | 165 μF |
| Filter Inductor L | 1 mH |
| Inductor Resistance R | 0.052 Ω |
| Output Filter Conductor C2 | 2500 μF |
| Switching Frequency f | 20 kHz |
| Method | Parameters | Tracking Time with Irradiation Step Change | Average Power at 1000 W/m2 | ||
|---|---|---|---|---|---|
| 0 to 300 W/m2 | 300 to 1000 W/m2 | 1000 to 300 W/m2 | |||
| Fixed step size | ΔVref = 1 V | 0.56 s | 0.65 s | 0.70 s | 175.5 W |
| ΔVref = 4.8 V | 0.37 s | 0.13 s | 0.16 s | 172.6 W | |
| Variable step size | N = 1, ΔVrefmax = 4.8 V | 0.55 s | 0.22 s | 0.51 s | 175.4 W |
| Proposed method | ΔVref1 = ΔVref2 = 4.8 V | 0.39 s | 0.16 s | 0.204 s | 175.4 W |
| ΔVref1 = 4.8 V, ΔVref2 = 1.6 V | 0.38 s | 0.14 s | 0.165 s | 175.6 W | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Chen, Y.; Zhou, D.; Liu, J.; Zeng, J. A High-Performance Adaptive Incremental Conductance MPPT Algorithm for Photovoltaic Systems. Energies 2016, 9, 288. https://doi.org/10.3390/en9040288
Li C, Chen Y, Zhou D, Liu J, Zeng J. A High-Performance Adaptive Incremental Conductance MPPT Algorithm for Photovoltaic Systems. Energies. 2016; 9(4):288. https://doi.org/10.3390/en9040288
Chicago/Turabian StyleLi, Chendi, Yuanrui Chen, Dongbao Zhou, Junfeng Liu, and Jun Zeng. 2016. "A High-Performance Adaptive Incremental Conductance MPPT Algorithm for Photovoltaic Systems" Energies 9, no. 4: 288. https://doi.org/10.3390/en9040288