
An Innovative Control Strategy to Improve the Fault Ride-Through Capability of DFIGs Based on Wind Energy Conversion Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
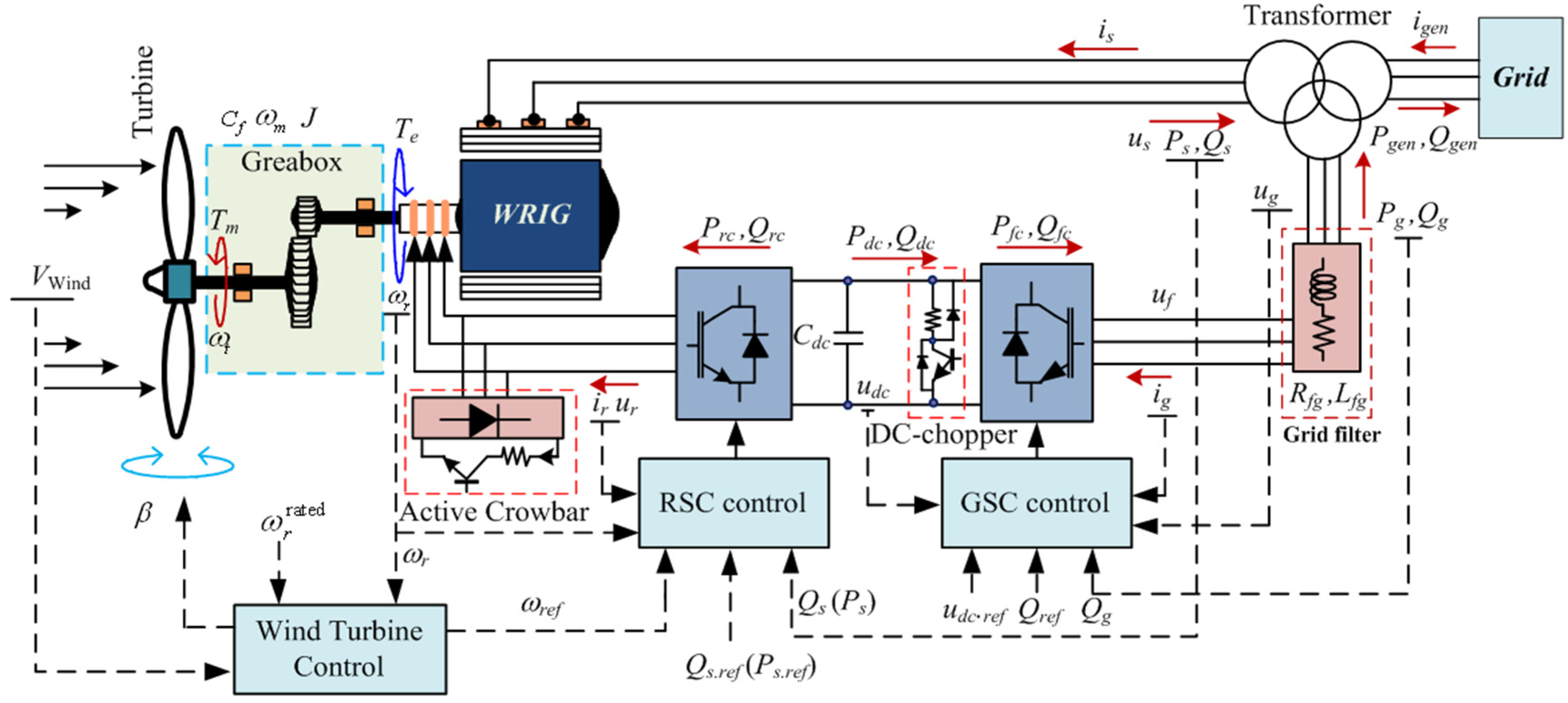
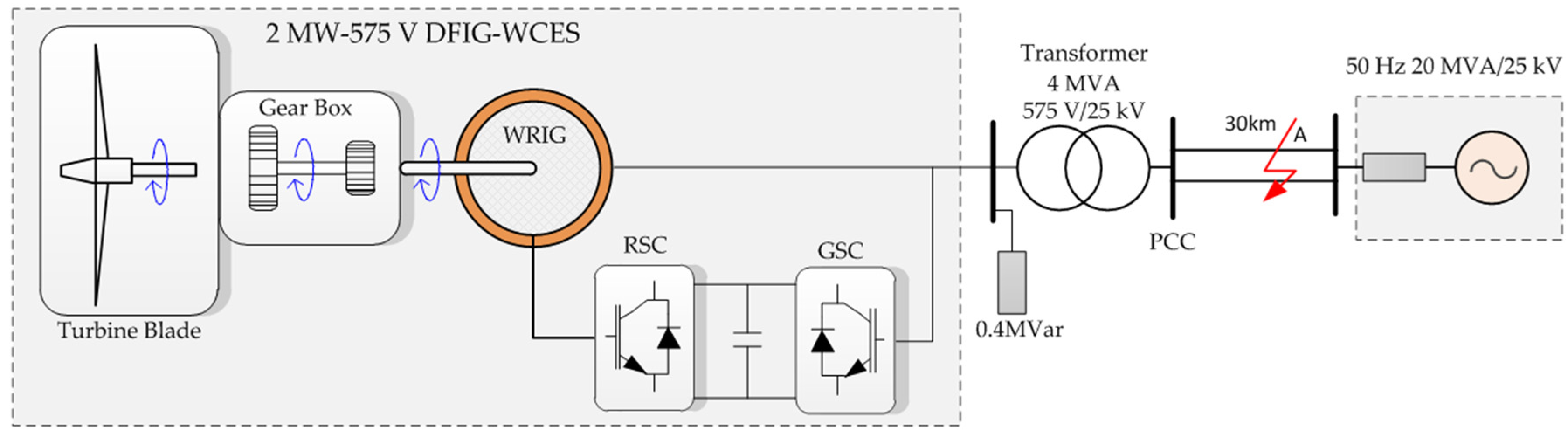
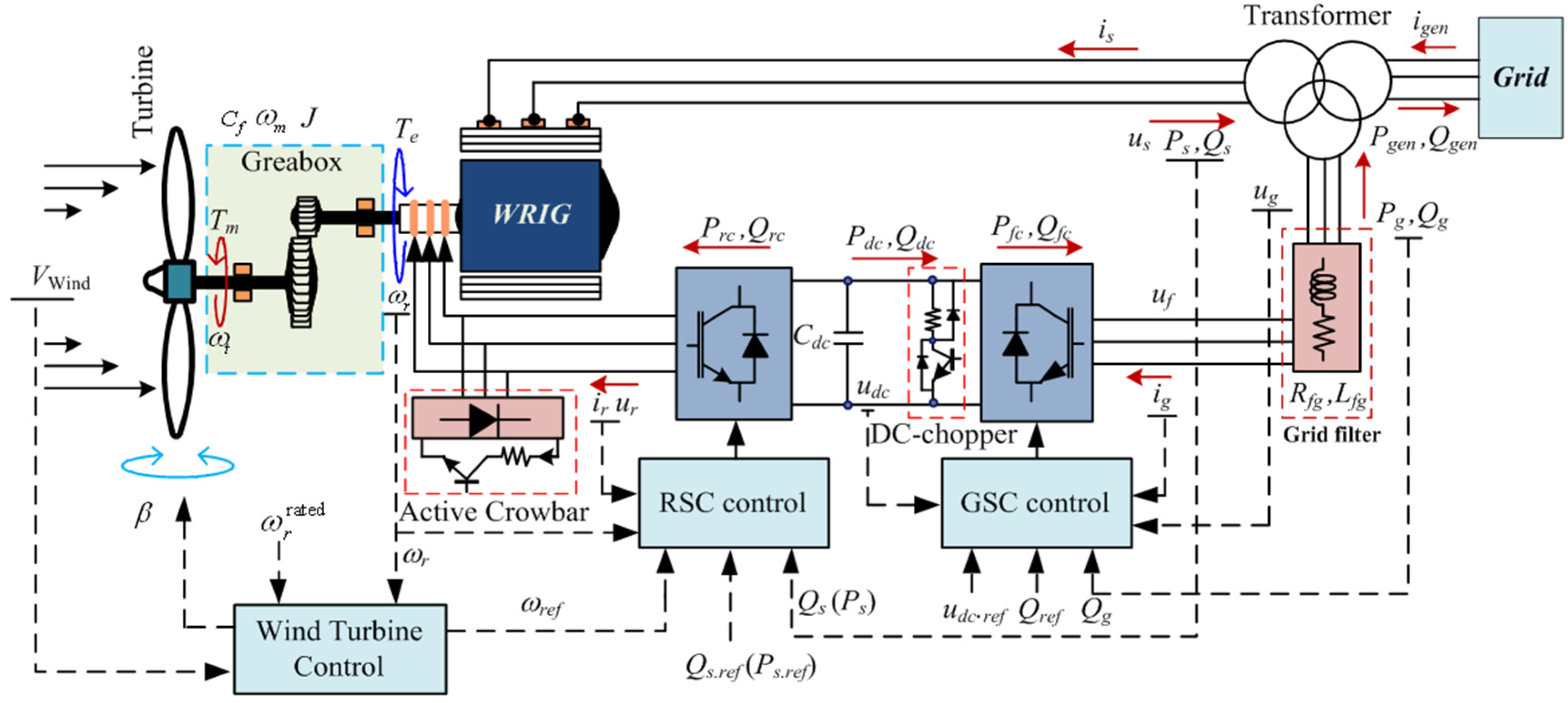
2. DFIG-WECS Model
2.1. WRIG
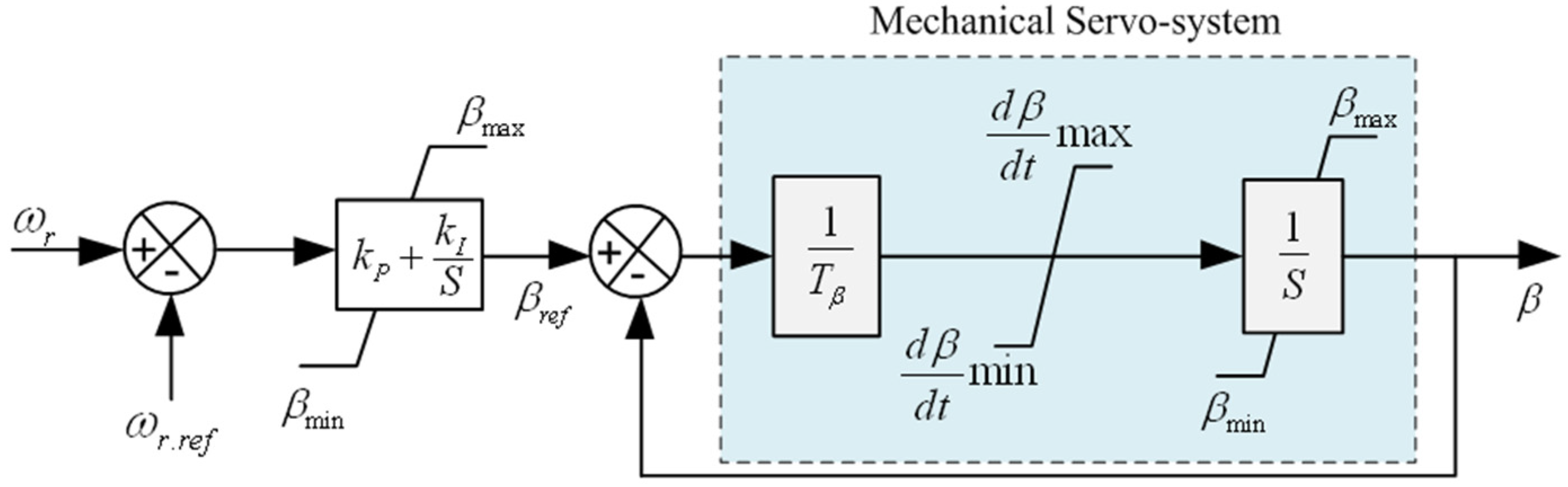
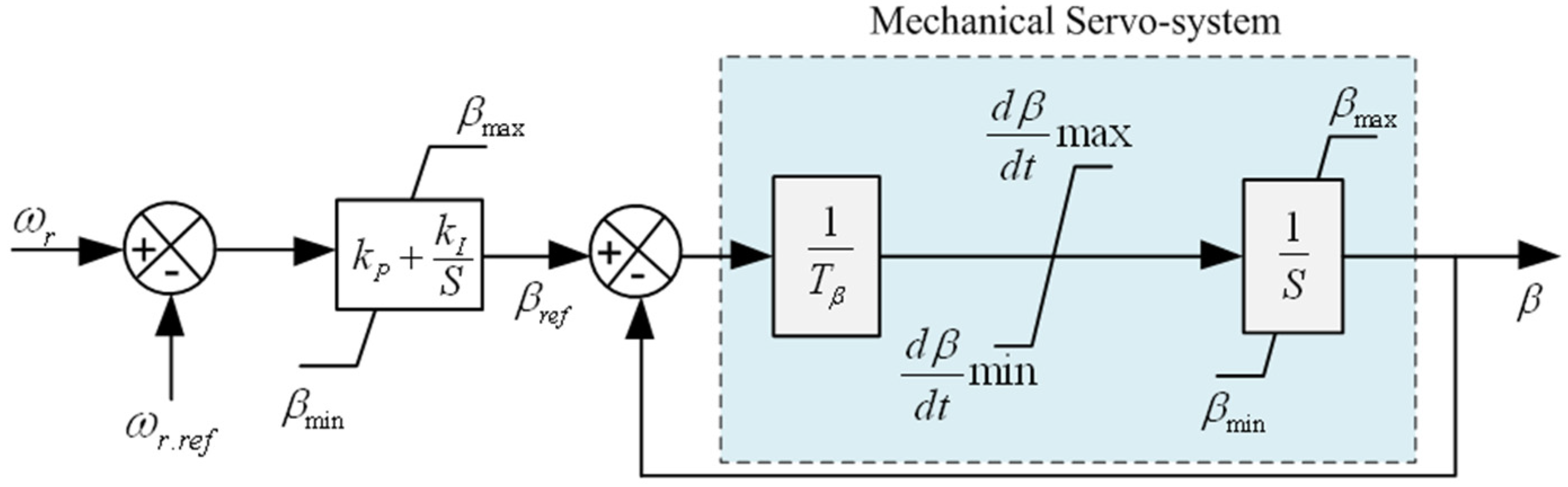
2.2. Wind Turbine
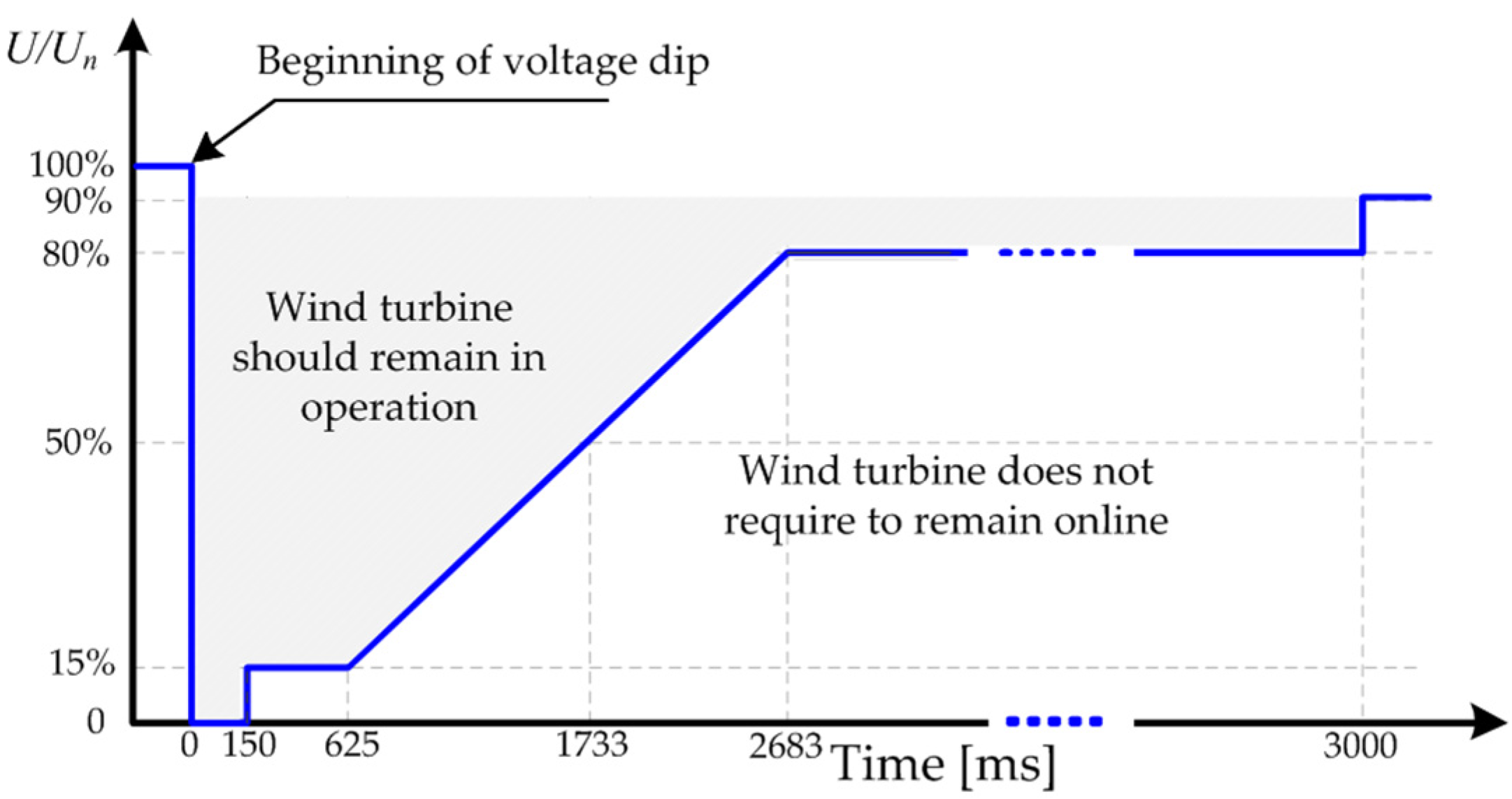
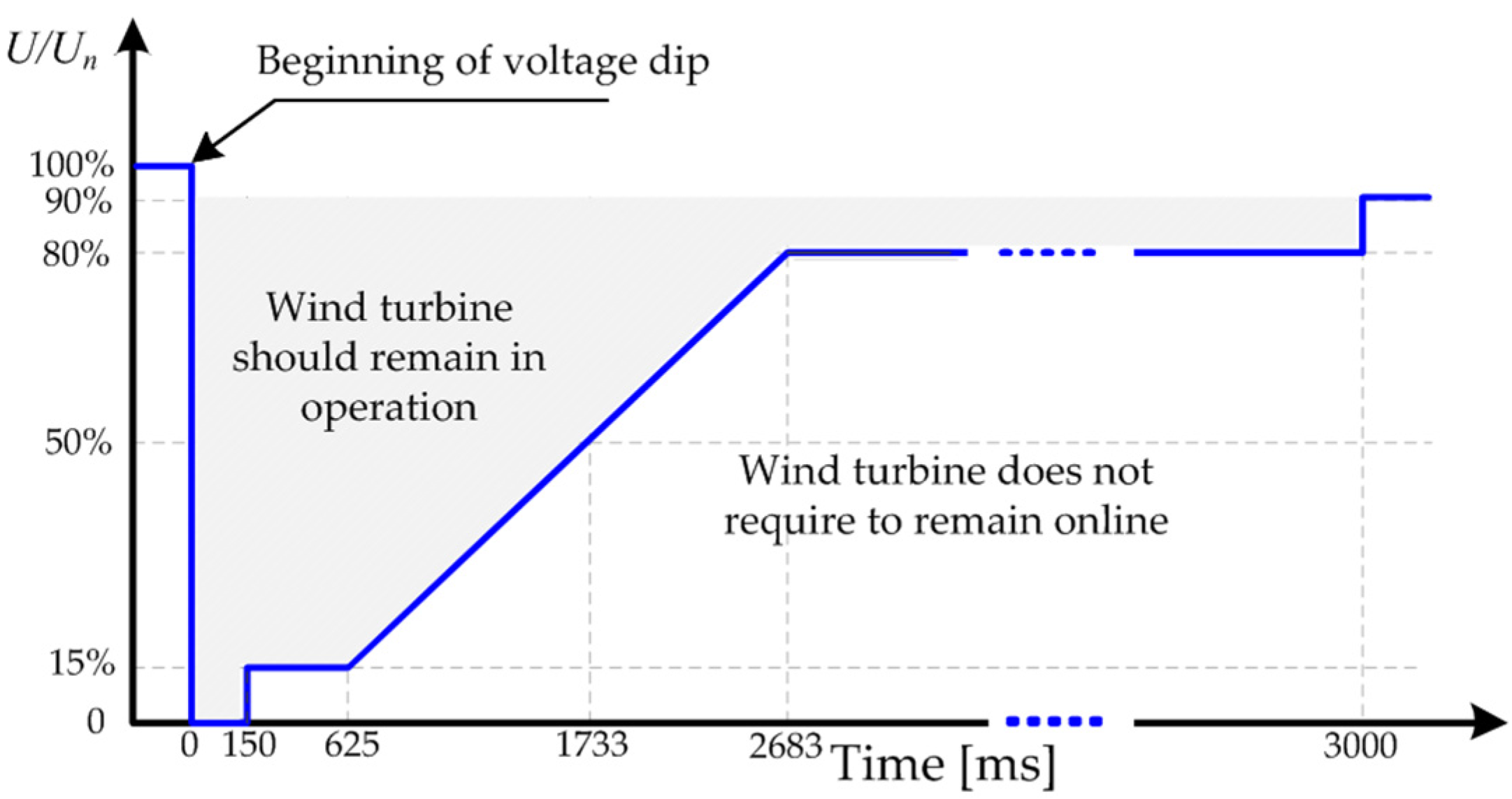
3. Behavior of the DFIG-WECS under Grid Fault Conditions
4. Proposed Control Strategy for the LVRT Capability of DFIG
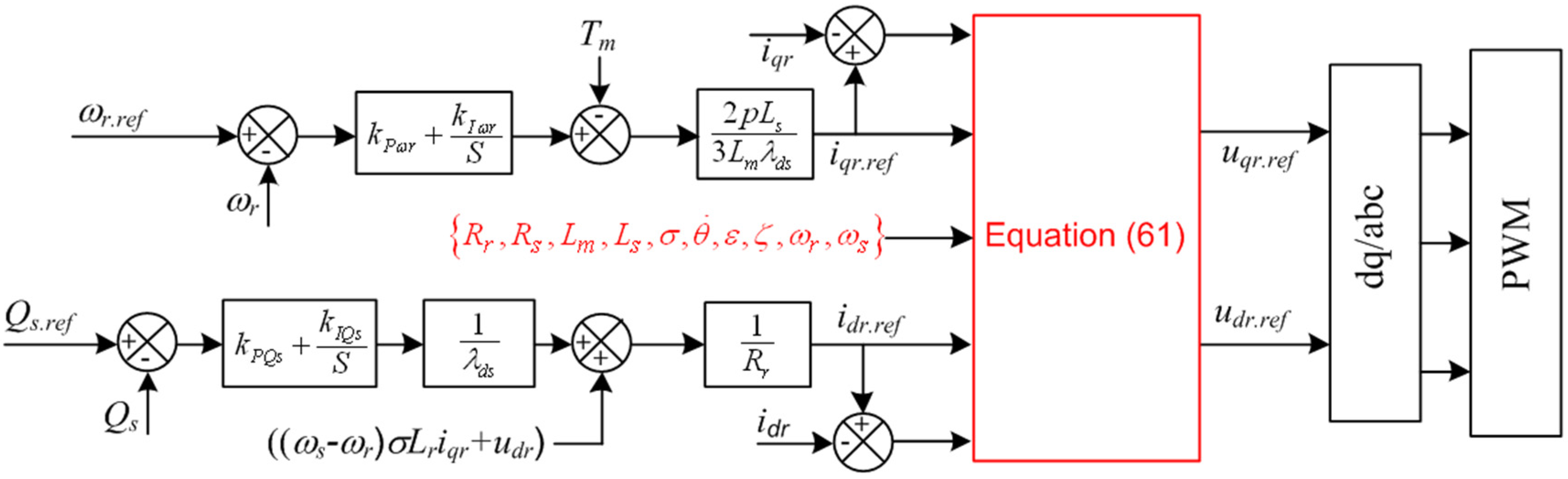
4.1. Control of RSC

4.1.1. Euler-Lagrange Equation and Passivity Property
Euler-Lagrange Equation for Electric Machine
Passivity Property of DFIG
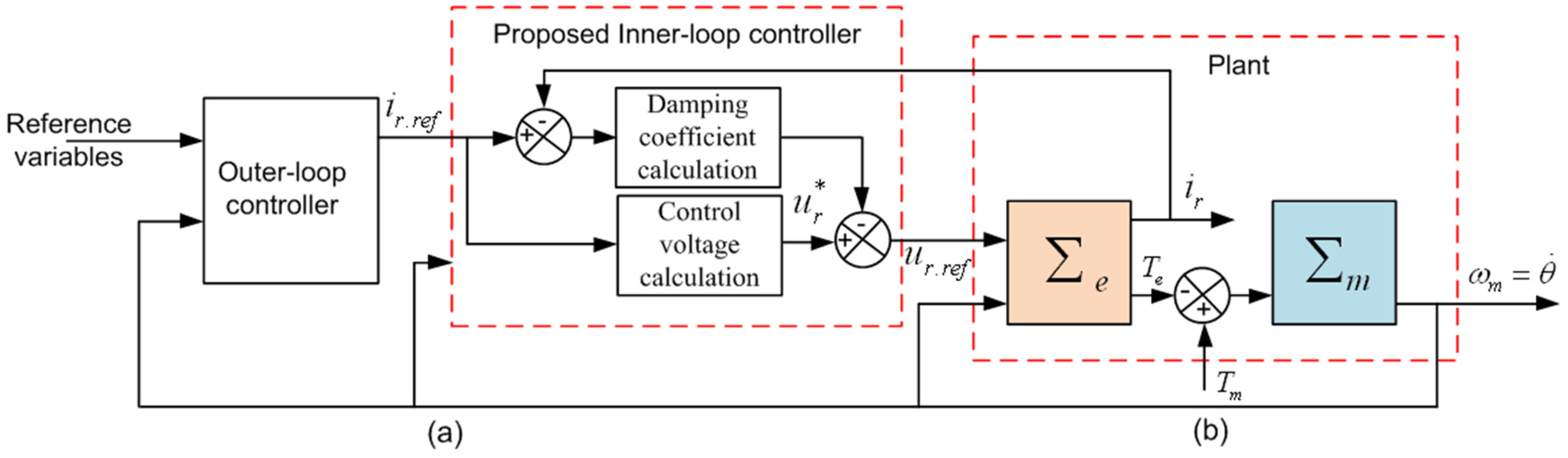
4.1.2. Design of Inner Control Loop
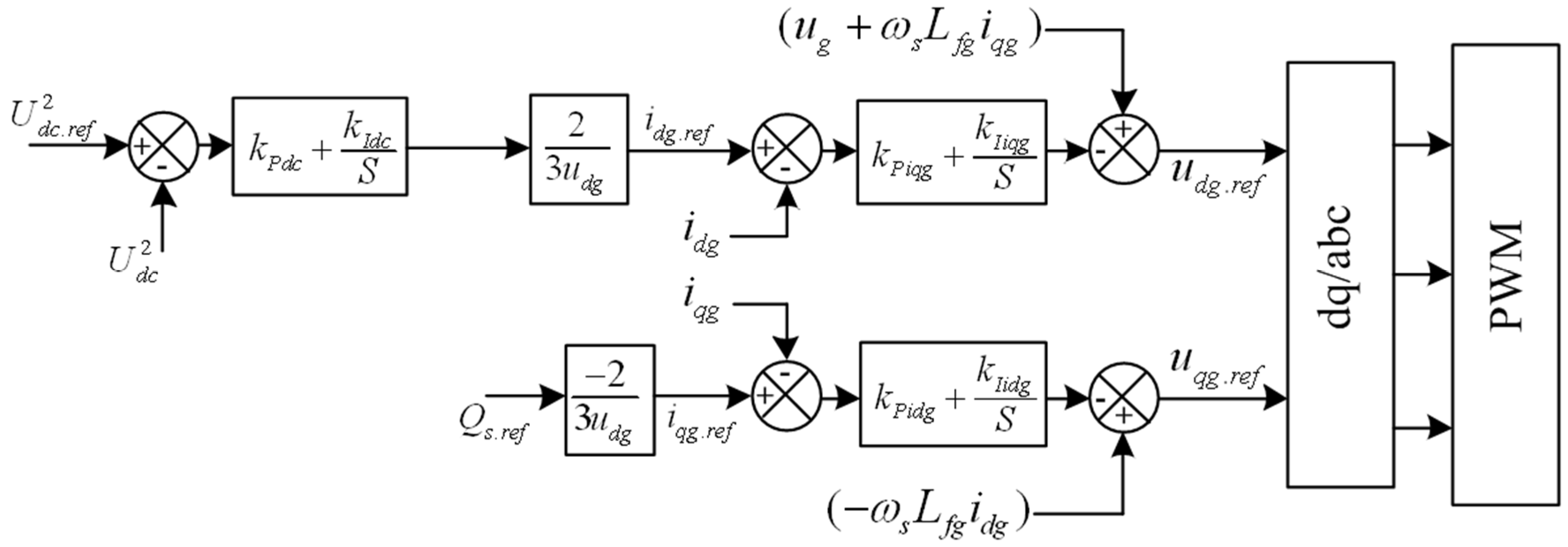
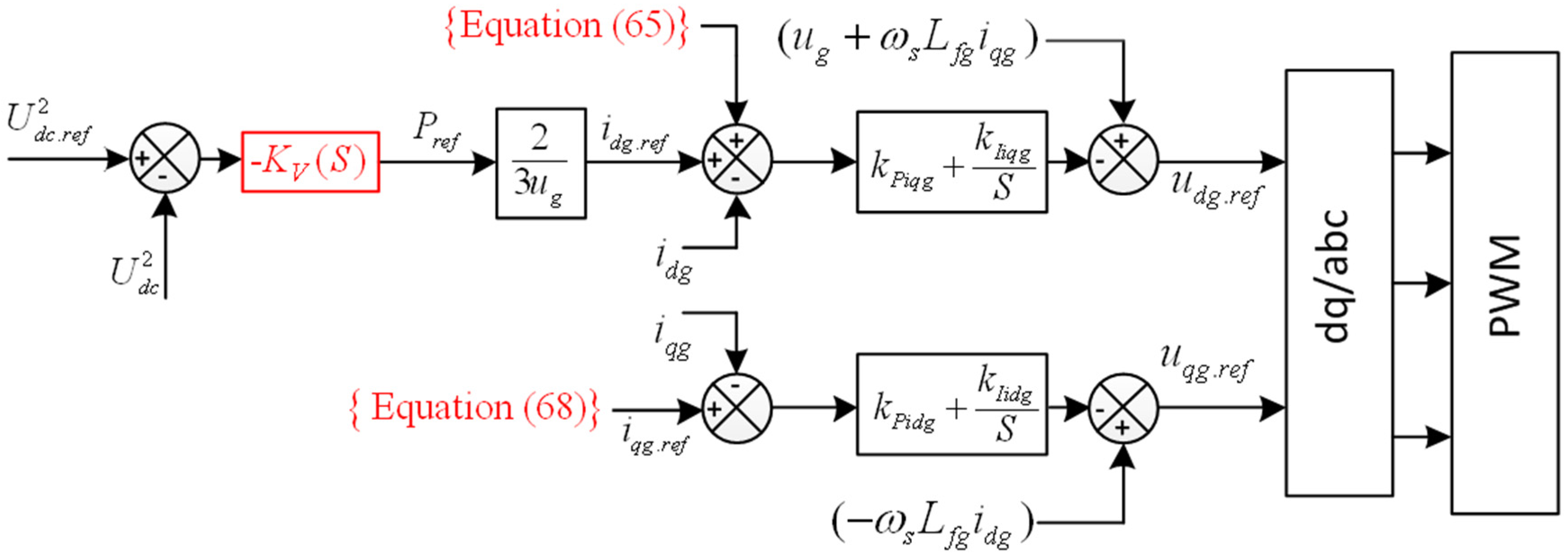
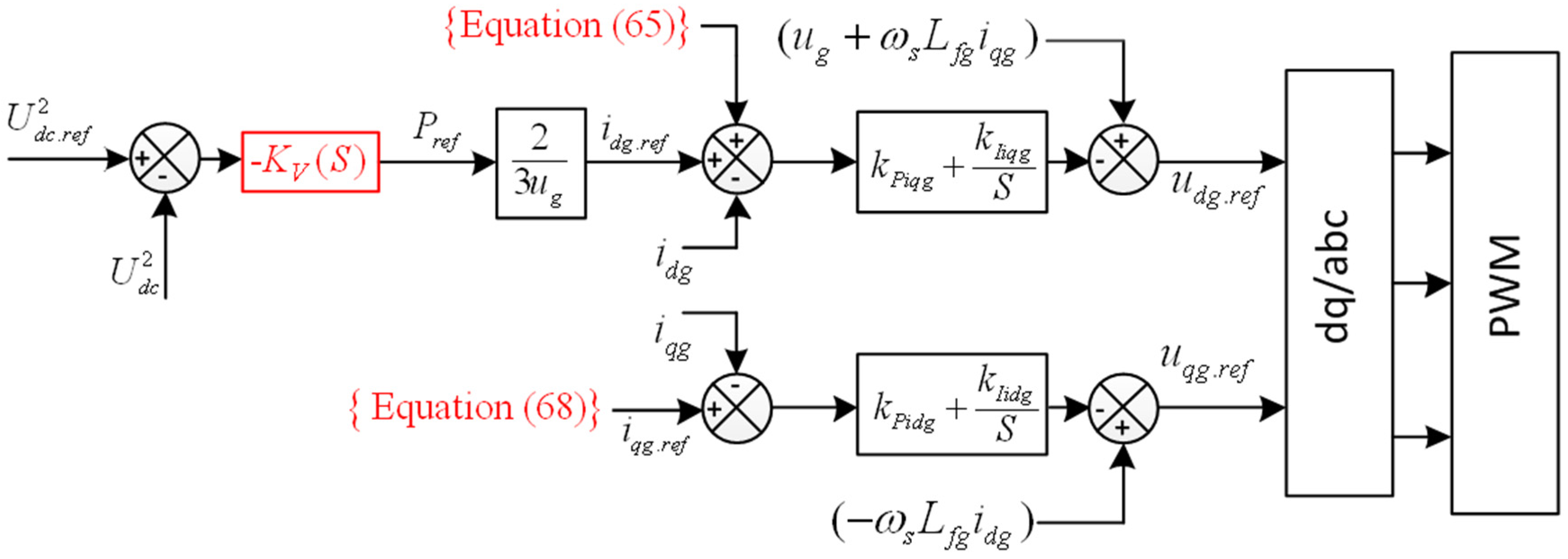
4.2. Control of GSC

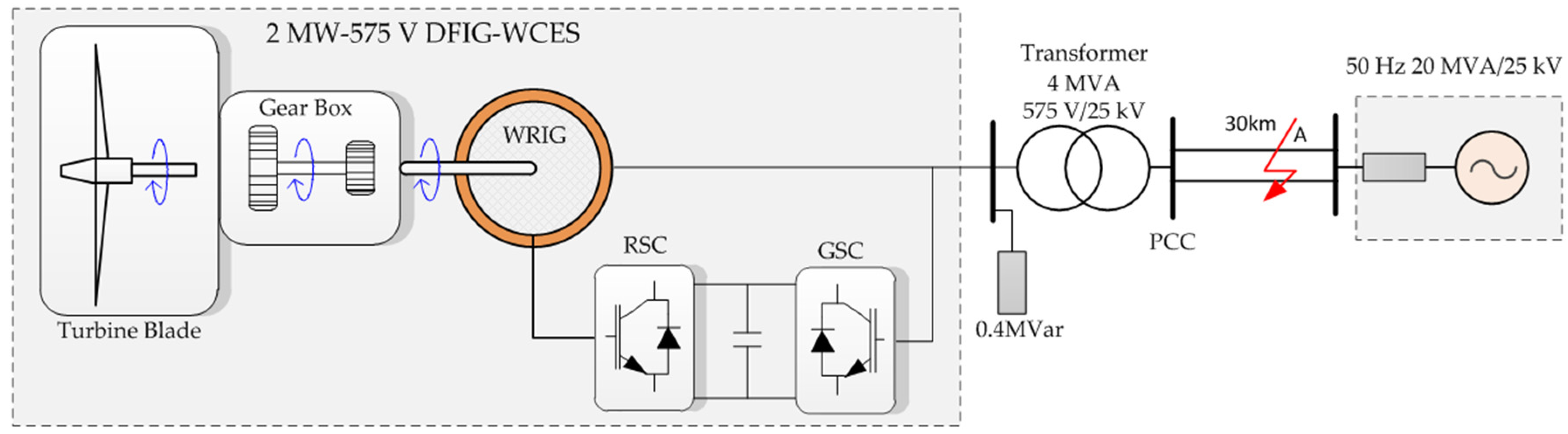
5. Case Study and Results
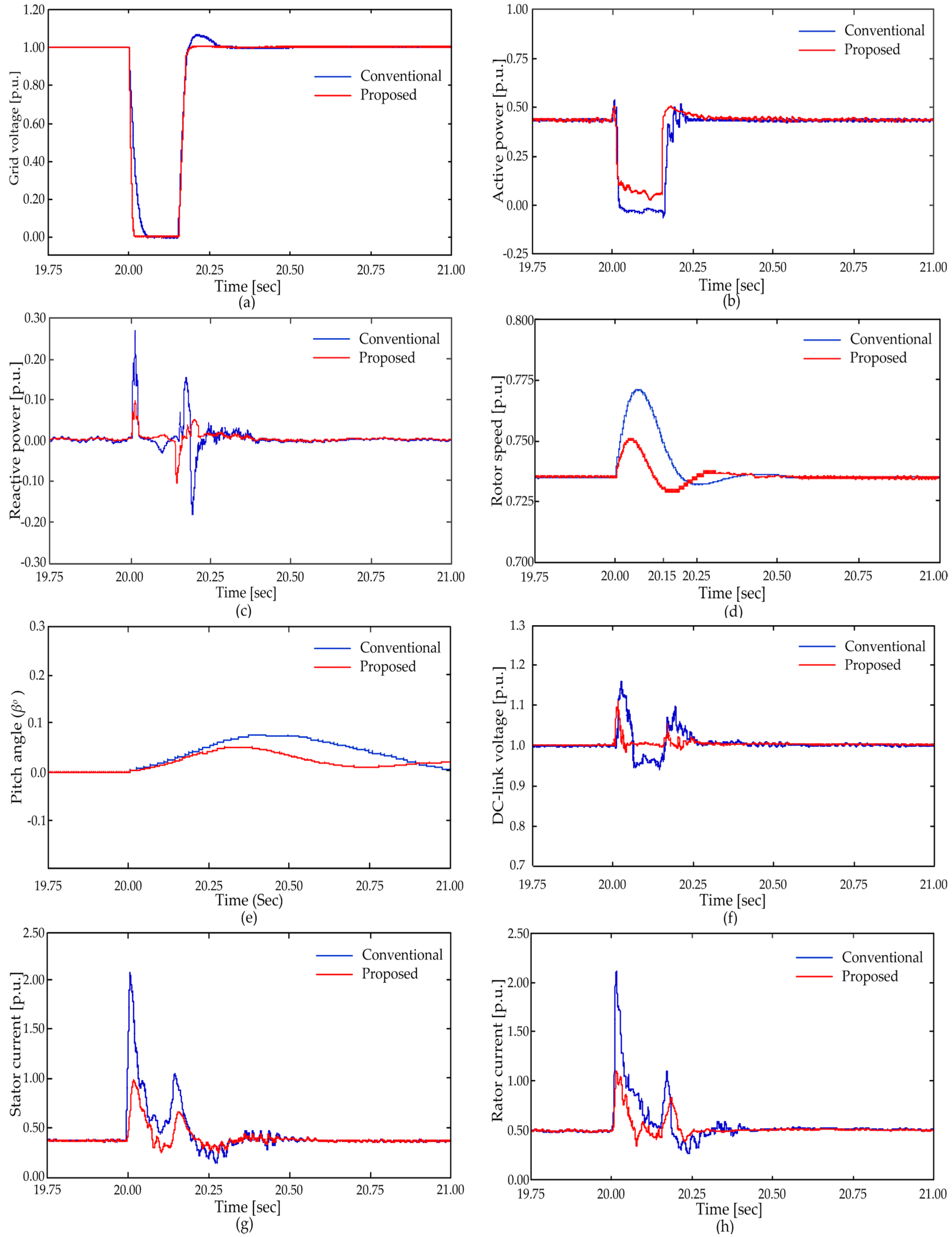
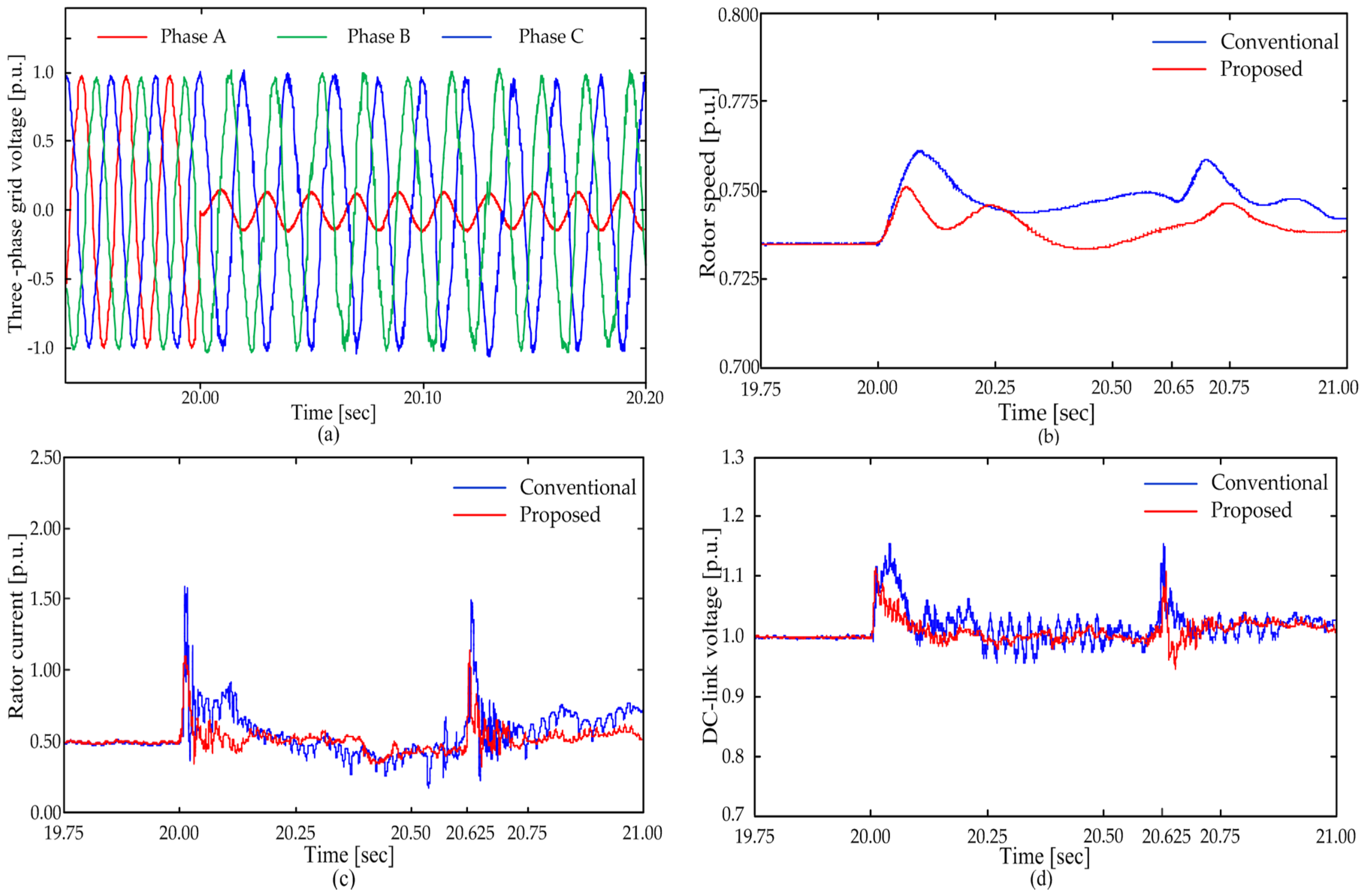
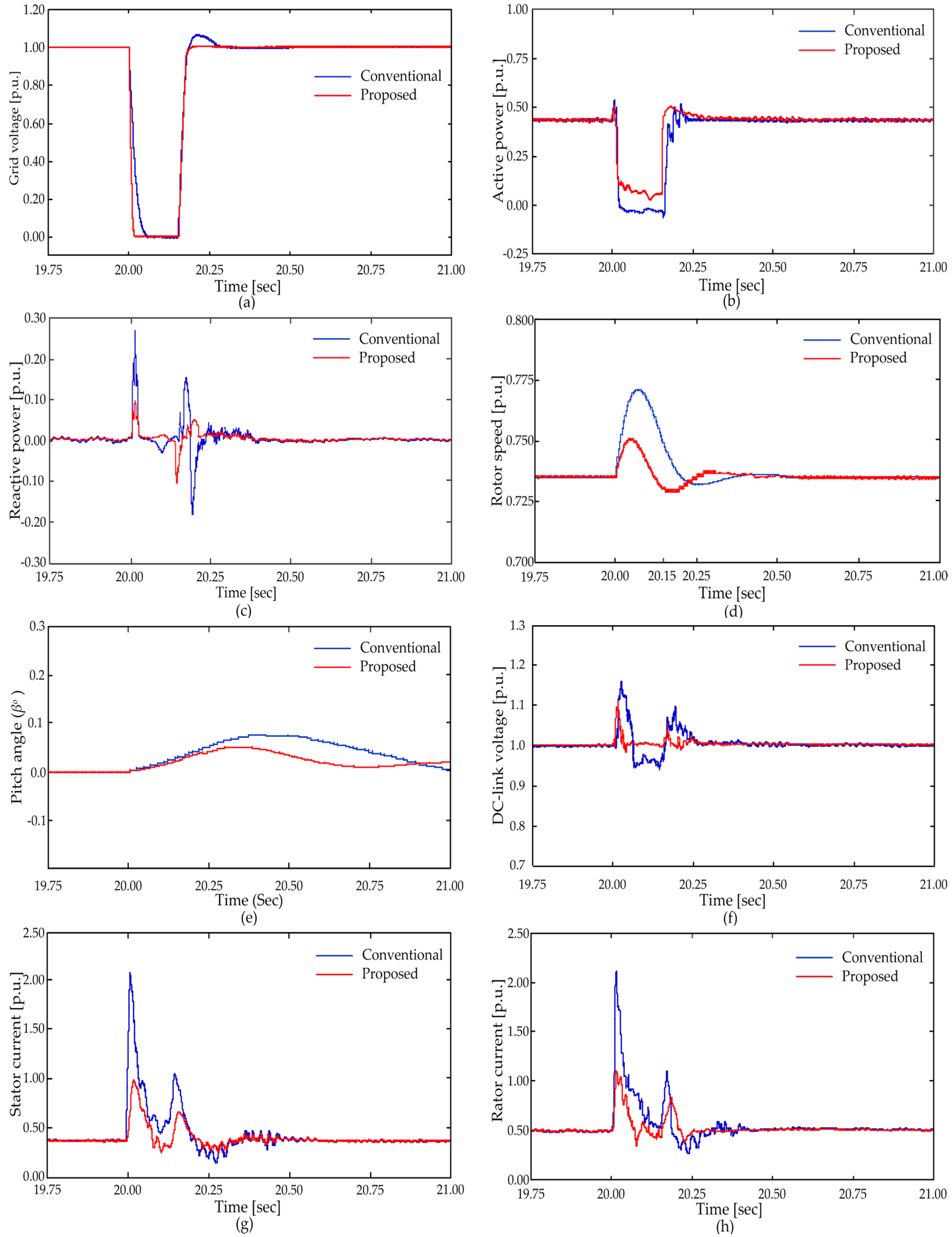
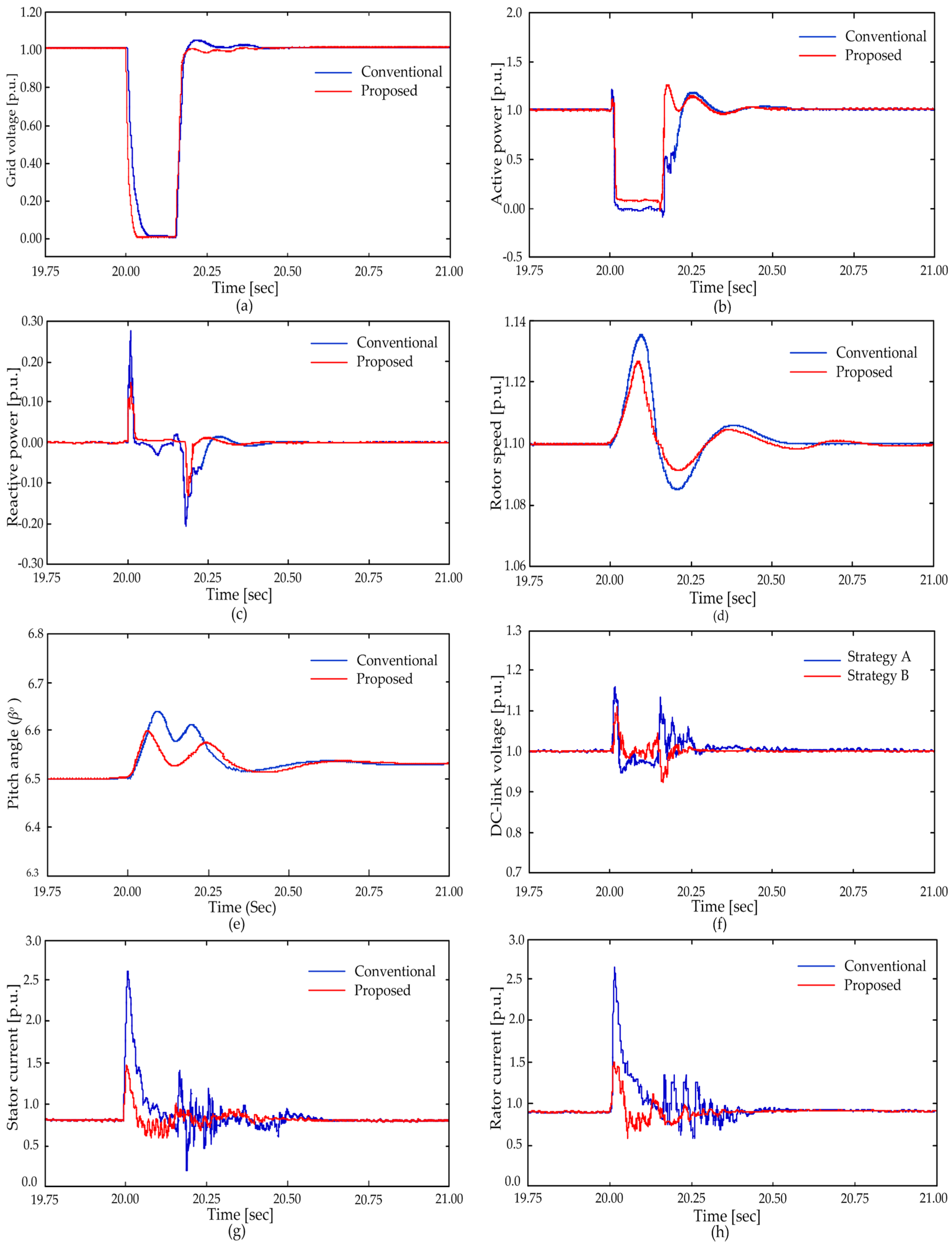
5.1. LVRT Capability under Symmetrical Fault Scenarios
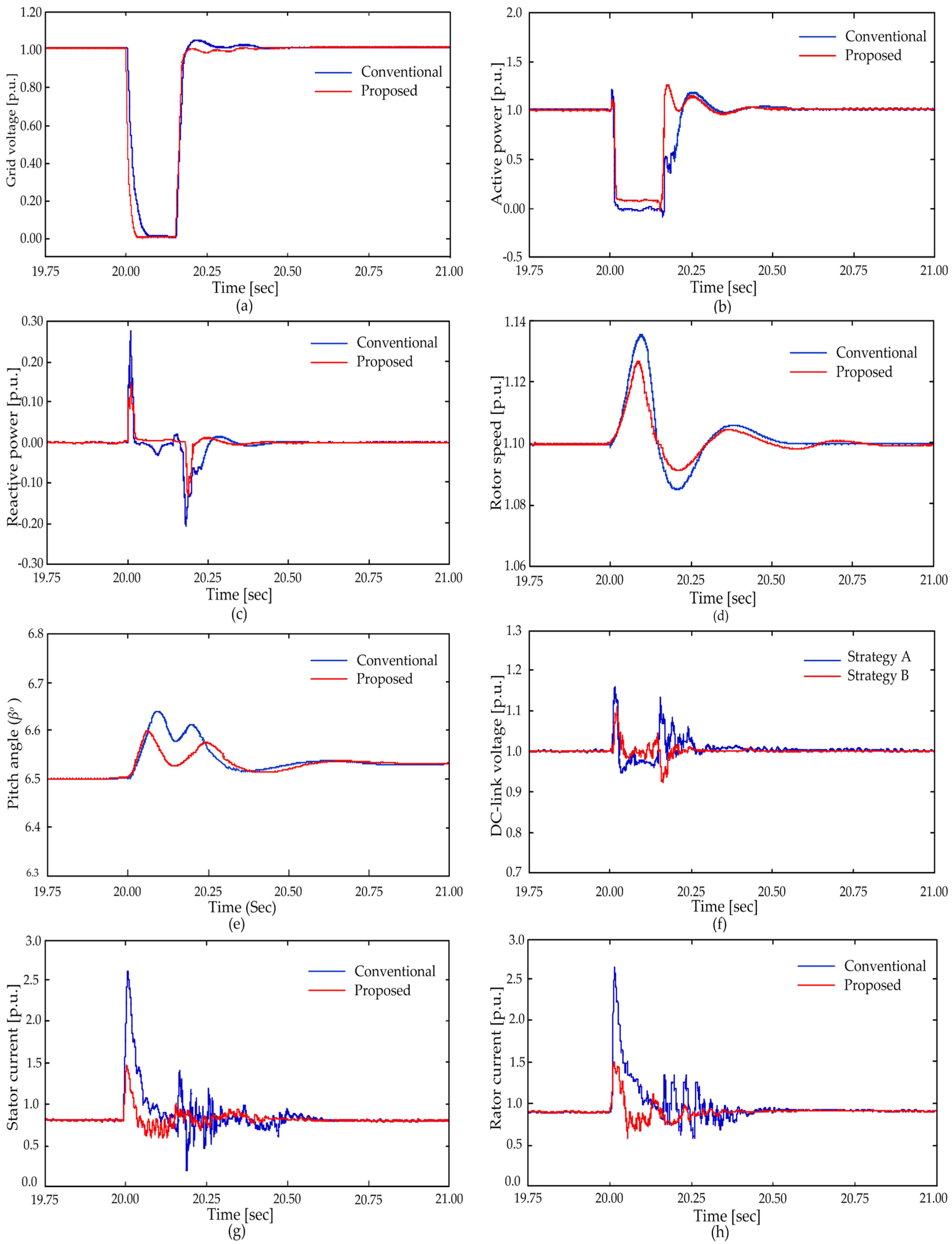
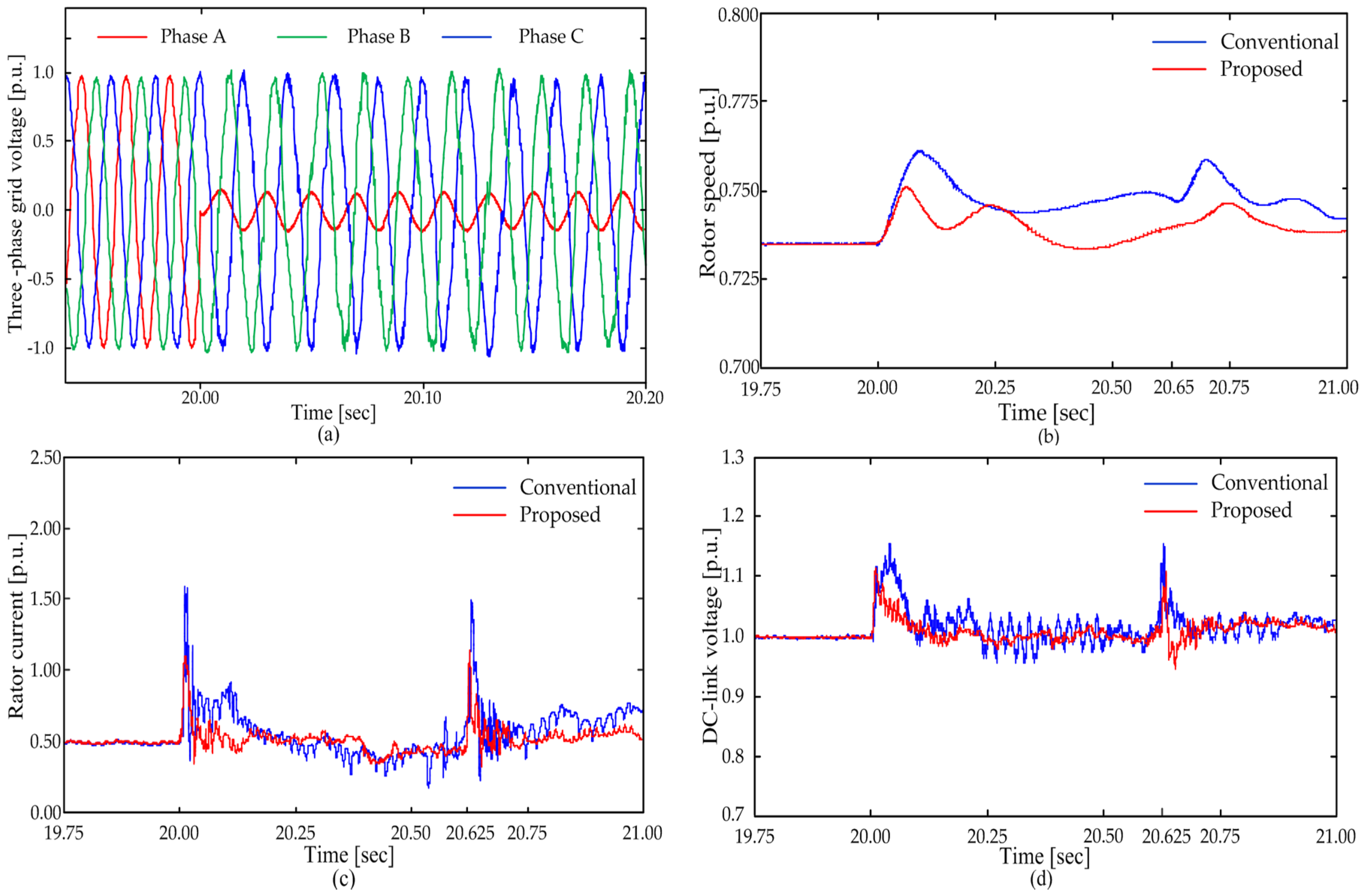
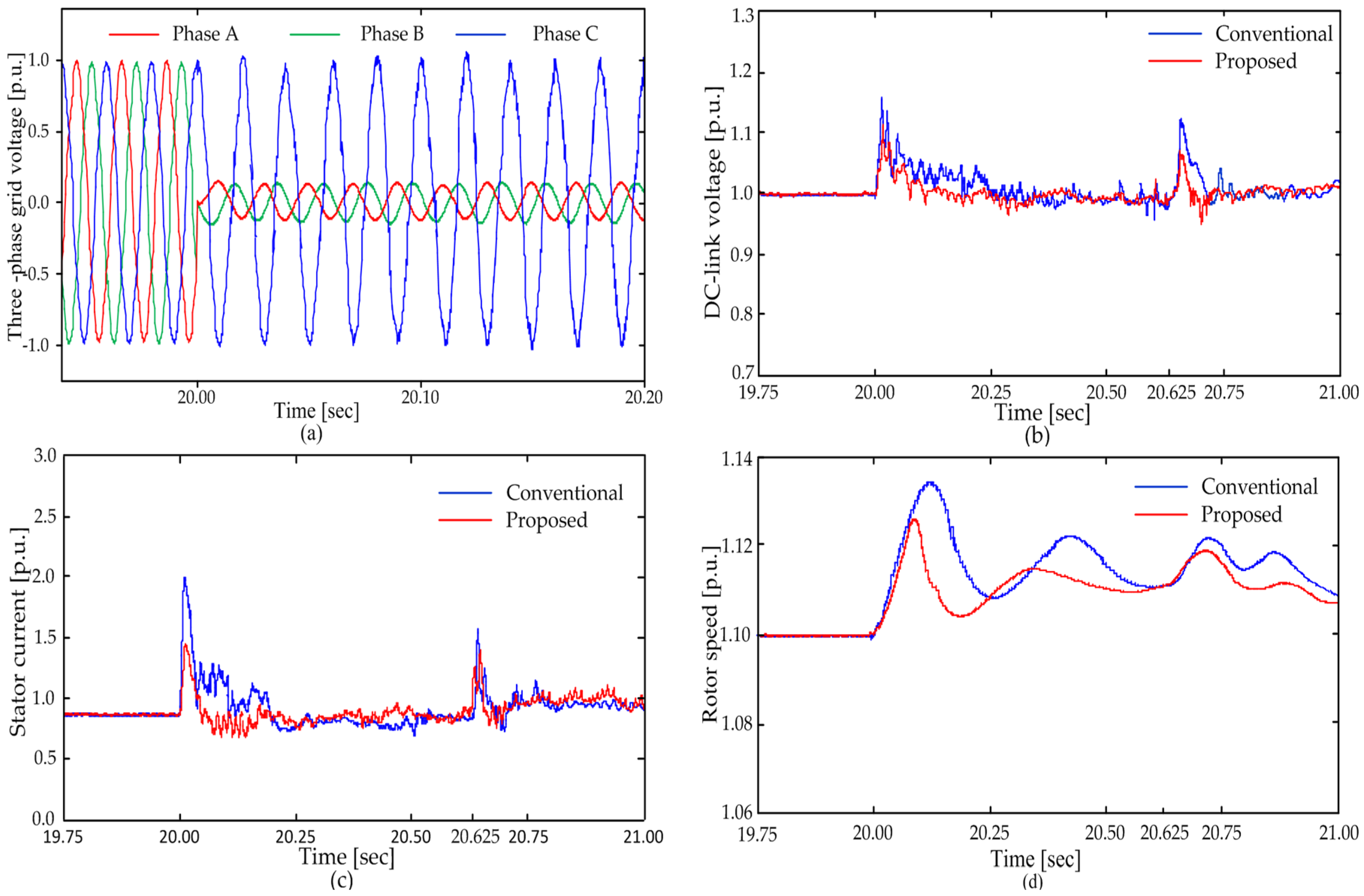
5.2. LVRT Capability under Asymmetrical Fault Scenarios
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
A1. Parameters of the DFIG-WCES
A2. Parameters of the Controllers
- The speed power regulator: Kp = 12.6, Ki = 7.65.
- The current power regulator (d-axis): Kp = 9.7, Ki = 0.04.
- The reactive power regulator: Kp = 5.5, Ki = 88.5.
- The current power regulator (q-axis): Kp = 9.7, Ki = 0.04.
- The coefficients in Equation (53): ε = 0.423 Rr, ζ = 0.278.
- The DC-link voltage regulator: Kp = 112.4, Ki = 25.6.
- The current power regulator (d-axis): Kp = 9.7, Ki = 0.04.
- The current power regulator (q-axis): Kp = 9.7, Ki = 0.04.
- The compensator:
- Kp = 100, Ki = 8, βmax = 45 degrees, βmin = 0 degrees, Tβ = 0.1 s.
References
- The Global Wind Report Annual Market Update 2014. Available online: http://www.gwec.net (accessed on 8 March 2015).
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Anca, D.H. Wind Power in Power Systems, 2nd ed.; Ackermann, T., Ed.; John Wiley & Sons: Chichester, West Sussex, UK, 2012; pp. 73–102. [Google Scholar]
- Boukhezzar, B.; Siguerdidjane, H. Nonlinear control with wind estimation of a DFIG variable speed wind turbine for power capture optimization. Energy Convers. Manag. 2009, 50, 885–892. [Google Scholar] [CrossRef]
- Fernandez, L.M.; Garcia, C.A.; Saenz, J.R.; Jurado, F. Equivalent models of wind farms by using aggregated wind turbines and equivalent winds. Energy Convers. Manag. 2009, 50, 691–704. [Google Scholar] [CrossRef]
- Müller, S.; Deicke, M.; de Doncker, R.W. Doubly fed induction generator systems for wind turbines. IEEE Ind. Appl. Mag. 2002, 8, 26–33. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010; pp. 127–310. [Google Scholar]
- Seman, S.; Niiranen, J.; Arkkio, A. Ride-through analysis of doubly fed induction wind-power generator under unsymmetrical network disturbance. IEEE Trans. Power Syst. 2006, 21, 1782–1789. [Google Scholar] [CrossRef]
- Rahimi, M.; Parniani, M. Grid-fault ride-through analysis and control of wind turbines with doubly fed induction generators. Electr. Power Syst. Res. 2010, 80, 184–195. [Google Scholar] [CrossRef]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Wind farms fault ride through using DFIG with new protection scheme. IEEE Trans. Sustain. Energy 2012, 3, 242–254. [Google Scholar] [CrossRef]
- Yao, J.; Li, Q.; Chen, Z.; Liu, A. Coordinated control of a DFIG-based wind-power generation system with SGSC under distorted grid voltage conditions. Energies 2013, 6, 2541–2561. [Google Scholar] [CrossRef]
- Flannery, P.S.; Venkataramanan, G. A fault tolerant doubly fed induction generator wind turbine using a parallel grid side rectifier and series grid side converter. IEEE Trans. Power Electron. 2008, 23, 1126–1135. [Google Scholar] [CrossRef]
- Yao, J.; Li, H.; Chen, Z.; Xia, X.; Chen, X.; Li, Q.; Liao, Y. Enhanced control of a DFIG-based wind-power generation system with series grid-side converter under unbalanced grid voltage conditions. IEEE Trans. Power Electron. 2013, 28, 3167–3181. [Google Scholar] [CrossRef]
- Wessels, C.; Gebhardt, F.; Fuchs, F.W. Fault ride-through of a DFIG wind turbine using a dynamic voltage restorer during symmetrical and asymmetrical grid faults. IEEE Trans. Power Electron. 2011, 26, 807–815. [Google Scholar] [CrossRef]
- Ibrahim, A.O.; Nguyen, T.H.; Lee, D.C.; Kim, S.C. A fault ride-through technique of DFIG wind turbine systems using dynamic voltage restorers. IEEE Trans. Power Syst. 2011, 26, 871–882. [Google Scholar] [CrossRef]
- Qiao, W.; Harley, R.G.; Venayagamoorthy, G.K. Coordinated reactive power control of a large wind farm and a STATCOM using heuristic dynamic programming. IEEE Trans. Energy Convers. 2009, 24, 493–503. [Google Scholar] [CrossRef]
- Hu, S.; Lin, X.; Kang, Y.; Zou, X. An improved low-voltage ride-through control strategy of doubly fed induction generator during grid faults. IEEE Trans. Power Electron. 2011, 26, 3653–3665. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Z.; Østergaard, J.; Dong, Z.Y.; Wong, K.P. Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Trans. Power Syst. 2012, 27, 713–722. [Google Scholar] [CrossRef]
- Xie, D.; Xu, Z.; Yang, L.; Ostergaard, J.; Xue, Y.; Wong, K.P. A comprehensive LVRT control strategy for DFIG wind turbines with enhanced reactive power support. IEEE Trans. Power Syst. 2013, 28, 3302–3310. [Google Scholar] [CrossRef]
- Rahimi, M.; Parniani, M. Coordinated control approaches for low-voltage ride-through enhancement in wind turbines with doubly fed induction generators. IEEE Trans. Energy Convers. 2008, 25, 873–883. [Google Scholar] [CrossRef]
- Abad, G.; Lopez, J.; Rodríguez, M.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; Hanzo, L., Ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 265–301. [Google Scholar]
- Quang, N.P.; Dittrich, J.A. Vector Control of Three-Phase AC Machines; Springer: Berlin/Heidelberg, Germany, 2008; pp. 185–223. [Google Scholar]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy System; Hanzo, L., Ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 49–85. [Google Scholar]
- Fan, L.; Kavasseri, R.; Miao, Z.L.; Zhu, C. Modeling of DFIG-based wind farms for SSR analysis. IEEE Trans. Power Deliv. 2010, 25, 2073–2082. [Google Scholar] [CrossRef]
- Iov, F.; Hansen, A.D.; Sorensen, P.; Blaabjerg, F. Wind Turbine Blockset in Matlab/Simulink; Aalborg University: Aalborg, Denmark, 2004; pp. 21–87. [Google Scholar]
- Zhang, W.; Xu, Y.; Liu, W.; Ferrese, F.; Liu, L. Fully distributed coordination of multiple DFIGs in a microgrid for load sharing. IEEE Trans. Smart Grid 2013, 4, 806–815. [Google Scholar] [CrossRef]
- Miller, N.W.; Price, W.W.; Sanchez-Gasca, J.J. Dynamic Modeling of GE 1.5 and 3.6 Wind Turbine-Generators; General Electric International, Power Systems Energy Consulting: Schenectady, NY, USA, 2003. [Google Scholar]
- Abad, G.; Rodriguez, M.A.; Poza, J.; Canales, J.M. Direct torque control for doubly fed induction machine-based wind turbines under voltage dips and without crowbar protection. IEEE Trans. Energy Convers. 2010, 25, 586–588. [Google Scholar] [CrossRef]
- Xu, L.; Wang, Y. Dynamic modeling and control of DFIG-based wind turbines under unbalanced network conditions. IEEE Trans. Power Syst. 2007, 22, 314–323. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEEE Proc. Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Ortega, R.; Loría, A.; Nicklasson, P.J.; Sira-Ramírez, H. Passivity-Based Control of Euler-Lagrange Systems: Mechanical, Electrical and Electromechanical Applications; Springer-Verlag: Berlin, Germany, 1998; pp. 133–510. [Google Scholar]
- Belabbes, B.; Lousdad, A.; Meroufel, A.; Larbaoui, A. Simulation and Modelling of Passivity Based Control of PMSM Under Controlled Voltage. J. Electr. Eng. 2013, 64, 298–304. [Google Scholar] [CrossRef]
- Aïssi, S. Contribution au Contrôle de la Machine Asynchrone Double Alimentée. Ph.D. Thesis, University of Batna, Batna, Algeria, 2010. [Google Scholar]
- Wang, Y.; Wu, Q.; Xu, H.; Guo, Q.; Sun, H. Fast coordinated control of DFIG wind turbine generators for low and high voltage ride-through. Energies 2014, 7, 4140–4156. [Google Scholar] [CrossRef] [Green Version]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, V.; Li, X.; Li, Y.; Dong, T.L.T.; Le, C. An Innovative Control Strategy to Improve the Fault Ride-Through Capability of DFIGs Based on Wind Energy Conversion Systems. Energies 2016, 9, 69. https://doi.org/10.3390/en9020069
Le V, Li X, Li Y, Dong TLT, Le C. An Innovative Control Strategy to Improve the Fault Ride-Through Capability of DFIGs Based on Wind Energy Conversion Systems. Energies. 2016; 9(2):69. https://doi.org/10.3390/en9020069
Chicago/Turabian StyleLe, Vandai, Xinran Li, Yong Li, Tran Le Thang Dong, and Caoquyen Le. 2016. "An Innovative Control Strategy to Improve the Fault Ride-Through Capability of DFIGs Based on Wind Energy Conversion Systems" Energies 9, no. 2: 69. https://doi.org/10.3390/en9020069