1. Introduction
Direct current (DC) microgrids are being increasingly developed and studied due to the fact that they are more efficient than alternating current (AC) systems from the perspective of energy conversion efficiency [
1,
2,
3]. This is due to the fact that most modern loads require DC power, to supply them with DC power directly rather than with AC power as conventional power systems do. For DC load examples, there are battery energy storage systems (BESSs), electric vehicles, laptops, personnel computers, lightings, televisions, data centers, refrigerators, and air conditioners [
4,
5,
6]. Moreover, since most renewable energy sources (RESs) and energy storage system (ESSs) generate DC power, rectification and inversion power electronic converter stages are eliminable in DC microgrids [
7]. Furthermore, a DC power system is more efficient than an AC power system from the perspective of line loss of power for the same voltage level.
An islanded DC microgrid is composed of loads, ESS, distributed generations (DGs), and an energy management system (EMS) or a central controller. Note that in a centralized control microgrid, a central controller can be regarded as an EMS [
8]. The reason for using EMS is to achieve control accuracy as described in [
9] and to enhance system control accuracy as described in [
10]. Some references [
8,
11,
12] described the detailed pros and cons of centralized and decentralized control methods of microgrid. The centralized control enables system optimization; however, it does not exhibit the desirable plug-and-play feature [
8]. On the other hand, the decentralized control can incorporate new DG units without continuous changes to controller settings, but it cannot implement operations requiring high levels of coordination [
8]. Reference [
11] shows that a decentralized EMS is technically feasible and economically competitive. Reference [
12] presents a multi agent system for intelligent demand-side management of the poly-generation microgrid topology, which also includes grey prediction algorithms for better management. Typically, ESS is controlled in two different modes—constant power (current) mode and constant voltage mode. While the ESS is controlled in constant power mode, the state of charge (
SOC) can be adjusted by the ESS itself since the output power can be controlled as desired. While the ESS is controlled in constant voltage mode, the output power varies according to change of system load. In this case, the
SOC should be controlled by other DGs and EMS. EMS receives
SOC data and orders dispatchable DGs to output their power to maintain the
SOC value at the desired level. The EMS cannot be used in case of emergency, such as communication failure, and hence the
SOC cannot be supported by other DGs, which is one of the major disadvantages of a centralized control method. To enhance system reliability, a decentralized control method is used alone or to support the EMS (centralized control method). Still, there are some disadvantages of a decentralized control method. Among those disadvantages, lack of
SOC information and poor grid voltage profile are focused in this paper.
Typically, in a decentralized control method, power sharing is implemented by the voltage droop control method. The advantages of the voltage droop control method are that it can share power and can compensate voltage drop. However, since the system voltage differs from node to node due to line voltage drop, DGs cannot share same amount of load even if droop coefficients are same. The most significant problem of the decentralized control method while using the ESS as a voltage source is the lack of SOC information for dispatchable DGs in an islanded DC microgrid. In a decentralized control method, SOC information cannot be transferred to dispatchable DGs since no communication system is used. Therefore, ESS may not be durable while it is controlled as constant voltage mode since dispatchable DGs cannot support the SOC.
Several researches have been studied to develop control methods for islanded (standalone) DC microgrids. Reference [
13] investigated control and operation of a DC microgrid, which can be operated at grid-connected or island modes. It suggests load shedding if the voltage of BESS drops below a certain value. In [
14], BESS is controlled as a constant voltage mode and its output voltage is adjusted by output current and droop coefficient. Similar to [
13], load is shed while the grid voltage or the
SOC drops below a certain level. However, in both [
13,
14] there are no control methods for durable operation of ESS. In [
15], the DC grid voltage is divided into five levels and a different operation mode is applied to each voltage level. With the proposed method in [
15], the ESS cannot be charged while its
SOC level is low. Reference [
16] presented a double-layer hierarchical control strategy to overcome the control challenge associated with the coordination of multiple batteries within one standalone microgrid. However, it requires a communication system (which may degrade the system reliability) for a hierarchical control strategy.
To overcome the disadvantages of the decentralized control method that is the focus of this paper (lack of SOC information), a power control method based on SOC and grid voltage with line voltage drop compensation is proposed. To this end, SOC-voltage droop is applied to the ESS and voltage droop with voltage drop compensation is applied to DGs. By using the proposed control method, SOC deviation from the specified reference value can be reflected in the grid voltage. Dispatchable DGs can support SOC by using the proposed power control method by estimating the SOC deviation which is assigned on the grid voltage. Hence, the SOC can be recovered close to the desired value in a decentralized control method, which could never be implemented by the previous works. The voltage drop compensation aids the power control of DGs to compensate voltage differences between nodes due to line voltage drop. The simulation is modeled and implemented by PSCAD/EMTDC and the simulation results show that the SOC maintaining capability as well as the system voltage profile is improved by using the proposed method.
The rest of this paper is organized as follows.
Section 2 shows the proposed control scheme of ESS and DG.
Section 3 presents the system configuration that is used in this study.
Section 4 shows the simulation results and discussion, and
Section 5 concludes the paper.
3. System Configuration
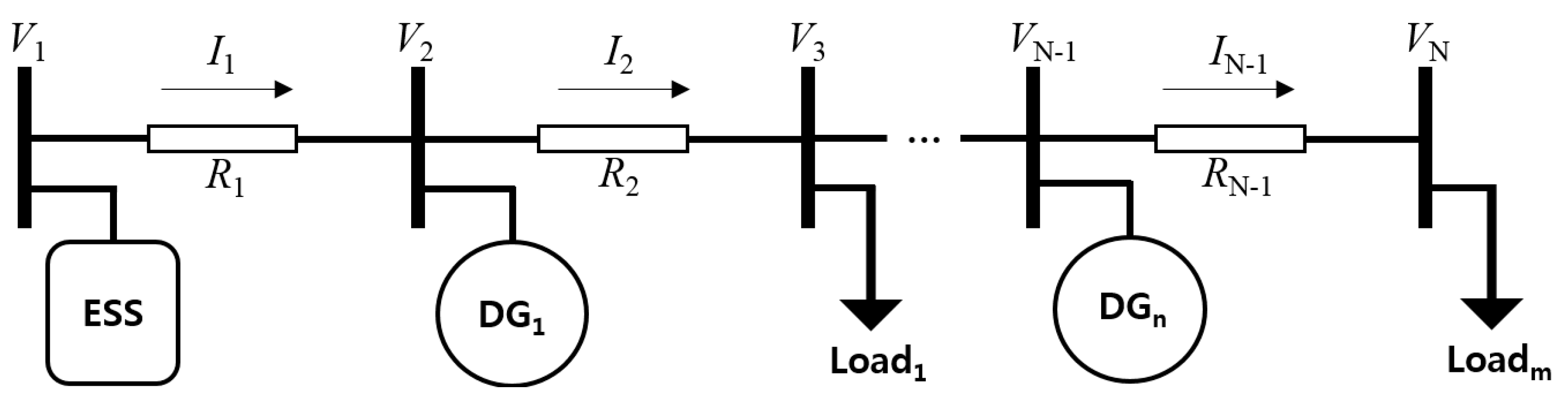
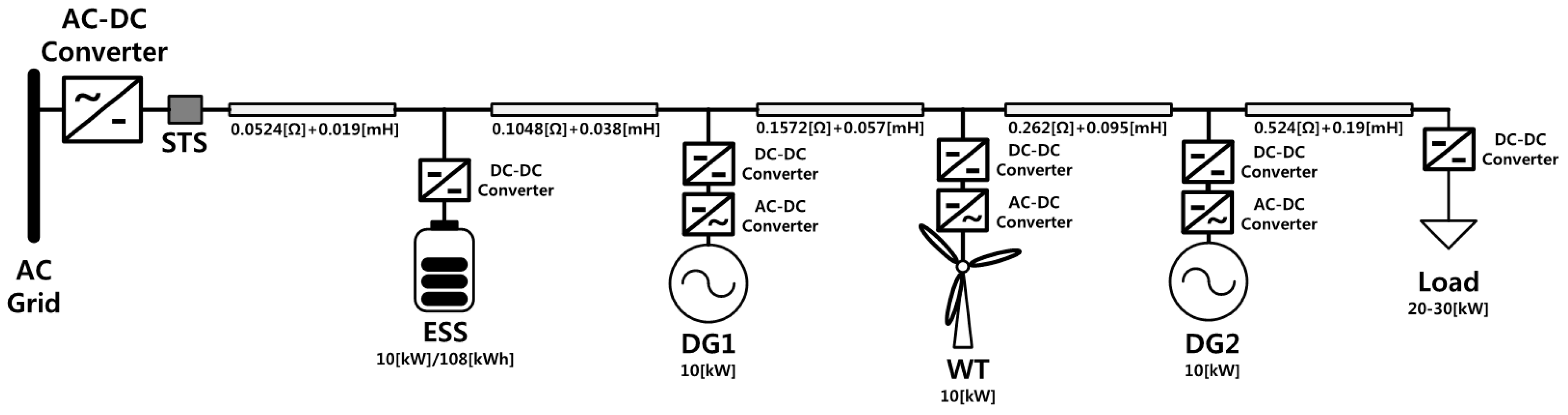
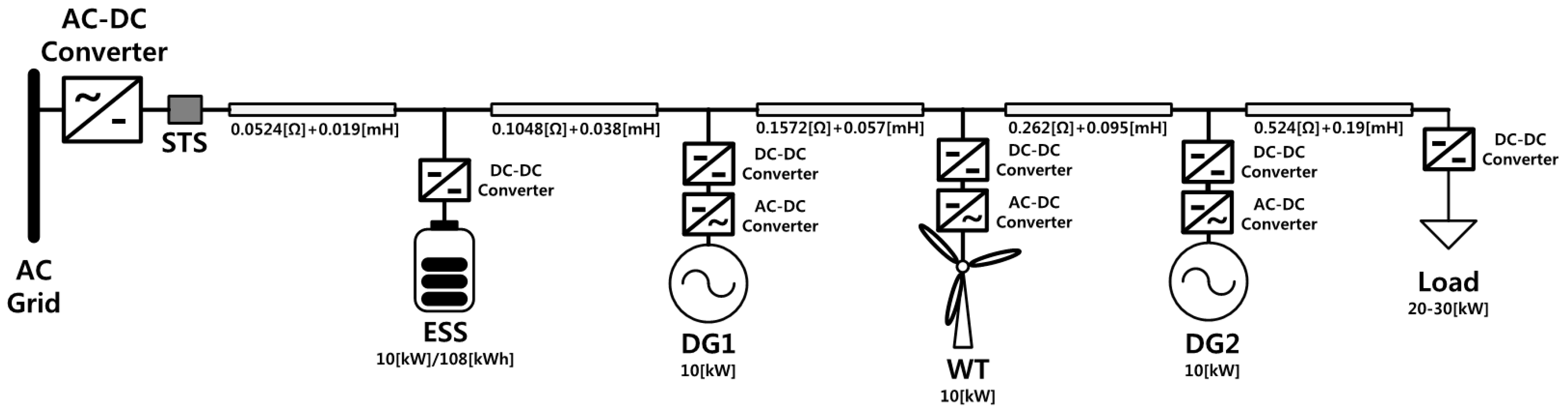
Figure 5 shows the configuration of the DC microgrid studied in this paper. The DC microgrid was modeled based on the experimental devices installed in Korea Electrotechnology Research Institute (KERI). It is made up of an AC-DC converter, static switch (STS), 10-kW/108-kWh ESS, two 10-kW DGs (dispatchable DG), one WT (non-dispatchable DG), load, and line impedance. The ESS and the load are connected to the DC microgrid with DC-DC converters and DGs are connected to the DC microgrid with AC-DC and DC-DC converters. The power rating of DC converters of the ESS, the WT, and the DGs is 10 kW. The power rating of load DC-DC converters is 30 kW. The nominal voltage of all DC-DC converters is 380/750 V (machine-side/grid-side). The nominal voltage of all AC-DC converters is 380 V for both AC and DC sides. The load was modeled as a variable resistor. The value of resistances and inductances of line are shown in
Figure 5.
The DC distribution line consists of a bipolar topology with a nominal voltage of ±750 V. In this study, only the plus pole is used. The STS is constantly opened since this paper focuses on the islanded DC microgrid. One of the most important parameters to observe is change in the SOC. It takes few minutes to see change of the SOC, but the simulation time is tens of seconds. The SOC is barely changed in a time scale of tens of seconds, so the capacity of the battery is scaled down to 1/60 of its original value (108 kWh) to see change of the SOC clearly.
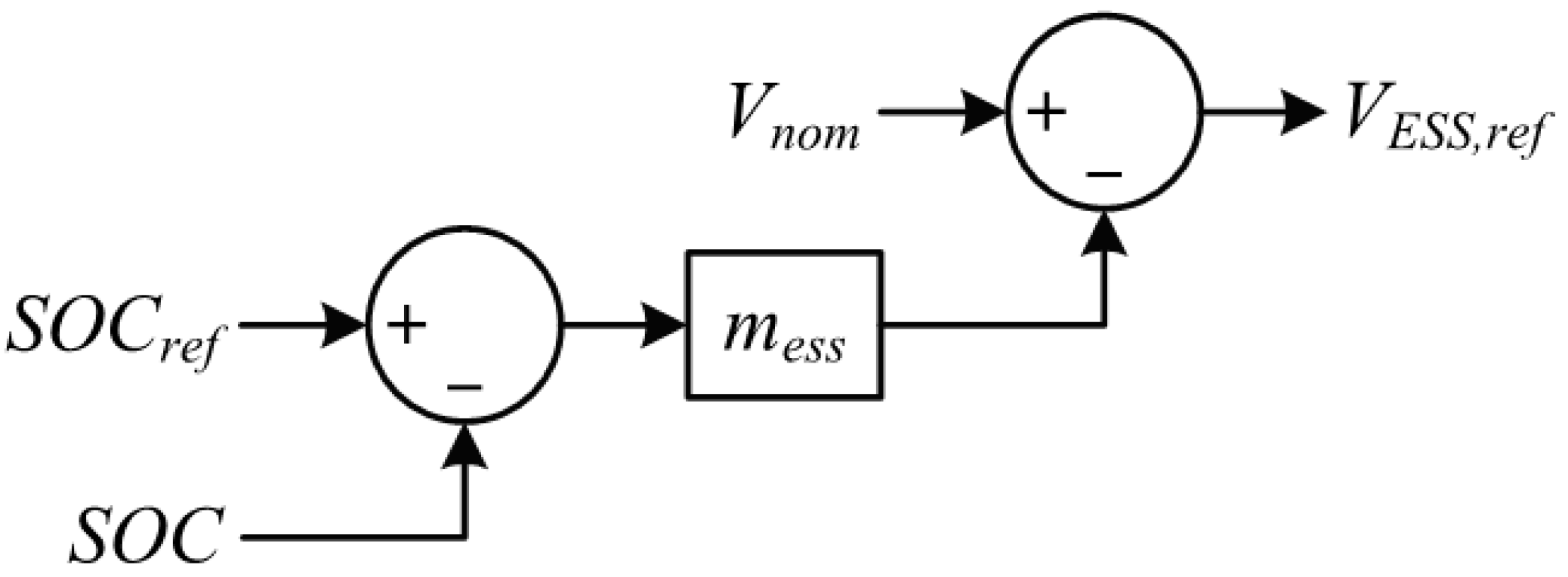
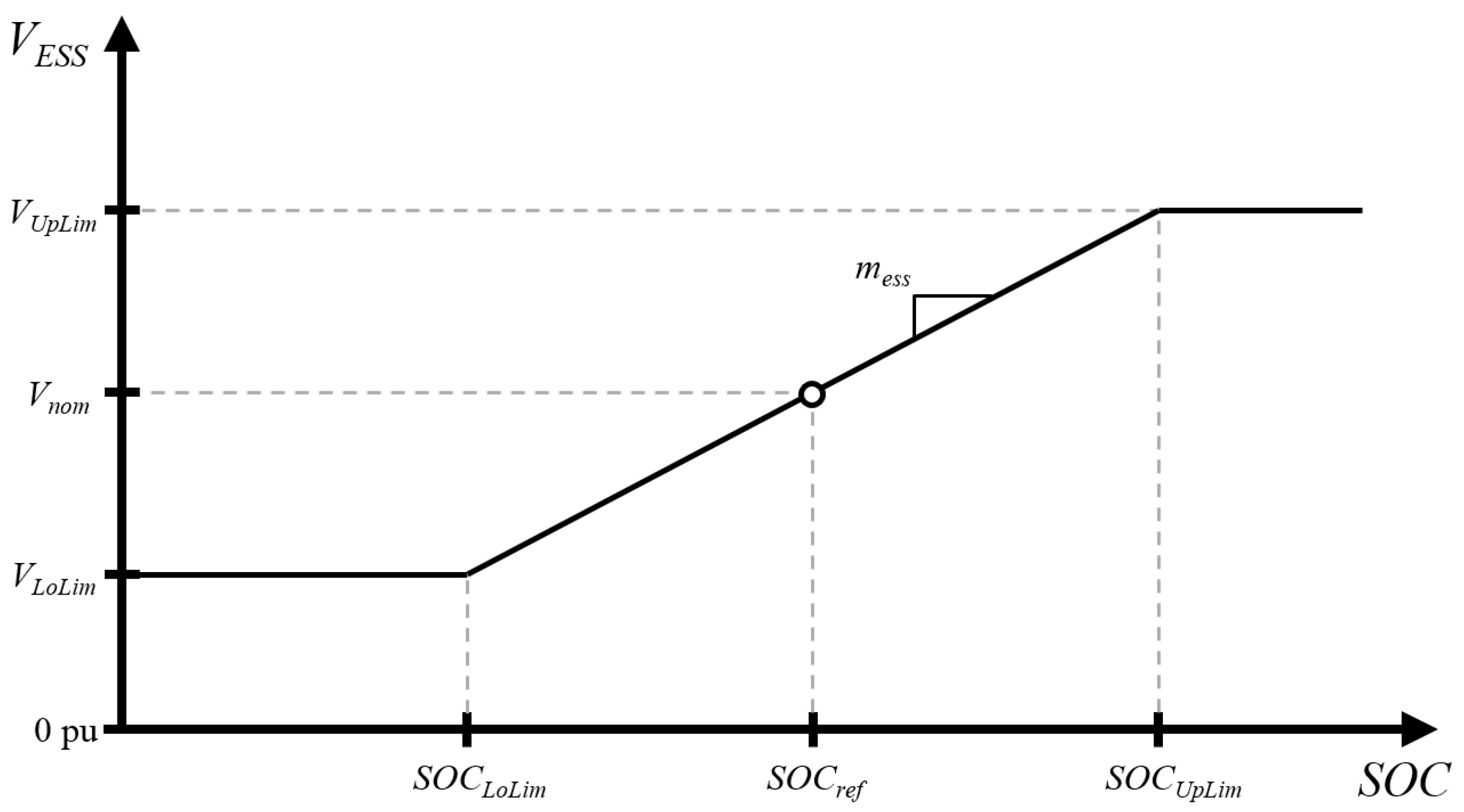
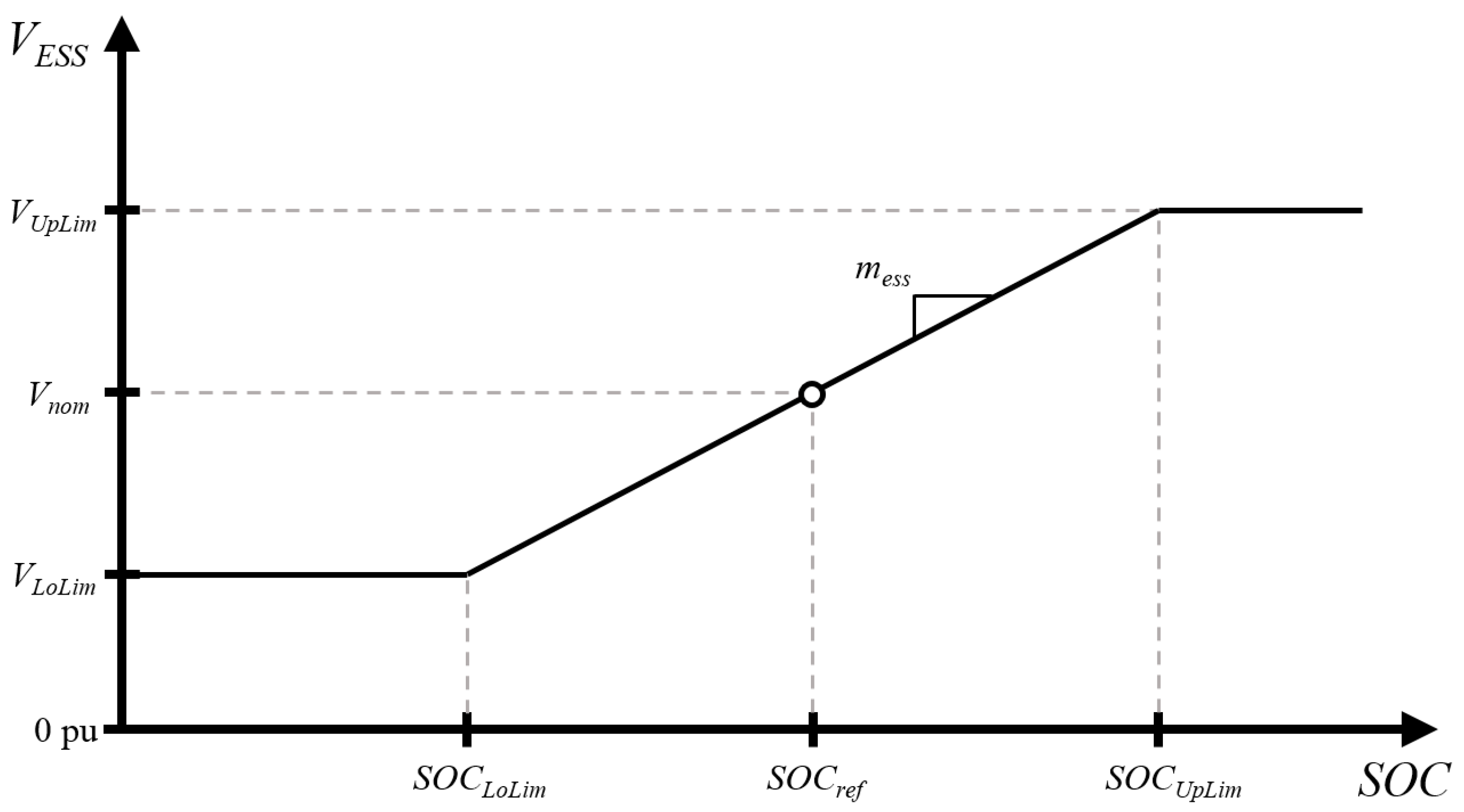
As mentioned in
Section 2,
SOCUpLim and
SOCLoLim is arbitrarily determined as 0.9 and 0.3, respectively, and hence
mess is 0.33 according to Equation (5). To calculate
Vcomp, a day-ahead forecasted power and estimated output current are shown in
Table 1. Since the nominal voltage of the DC grid is 750 V, the estimated current is simply acquired from the forecasted value divided by 750 V. Note that the WT power and the load can be changed instantaneously and the powers of DG1 and DG2 can also be changed due to the load change. These changes may cause an error while estimating the line voltage drop.
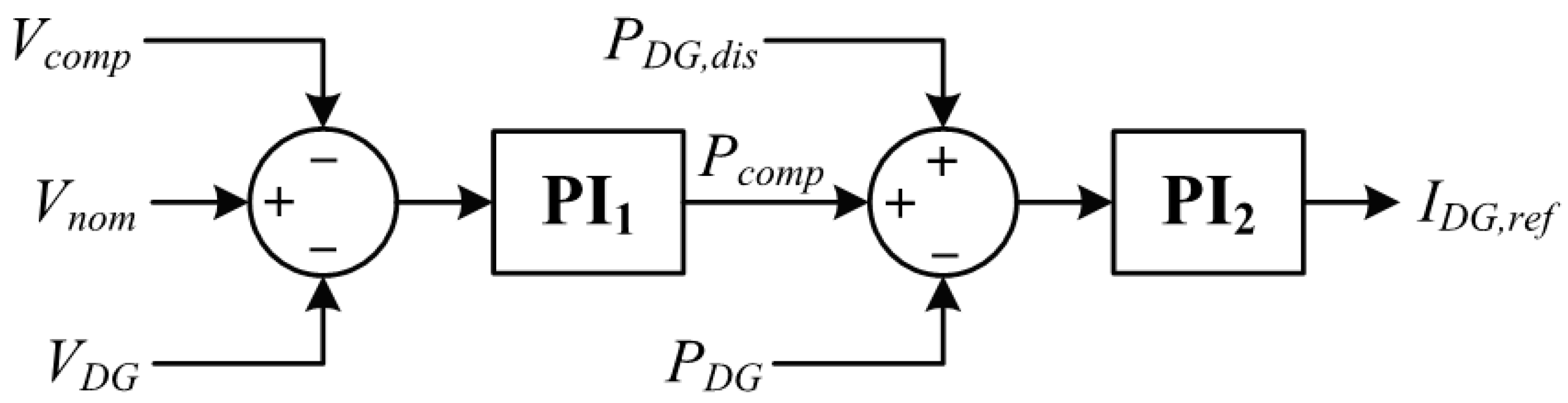
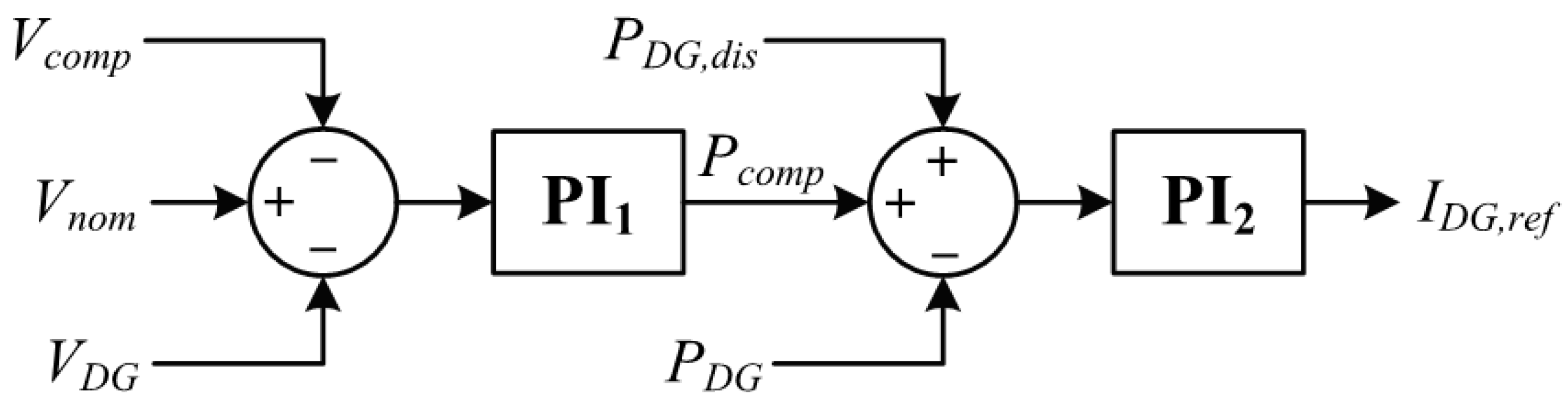
It is significantly important to carefully adjust the gain of PI
1 for DG1 and DG2 because electrical distances from DGs to the load are different from each other. Since DG2 is located closer to the load than DG1,
Pcomp (
Figure 3) of DG2 must be greater than that of DG1 if the gain of PI
1 for both DGs are same. To prevent this problem, the PI
1 gain of DG2 is set greater than that of DG1 in this study. The proportional gain and the integral gain of DG1 are 10 and 100, respectively, and those of DG2 are 1 and 10, respectively. However, these gains are dependent on the location of DGs, amount of load variation, and network topology. Hence, it is difficult to precisely calculate the gain ratio among the DGs. In this study, the gains were determined by trial and error using simulation tests. The proportional and integral gains of PI
2 for both DG1 and DG2 are 0.5 and 20, respectively.
4. Simulation Results and Discussion
Four different control methods including the proposed method were tested to prove the effectiveness of the proposed control method. Each control method is as follows:
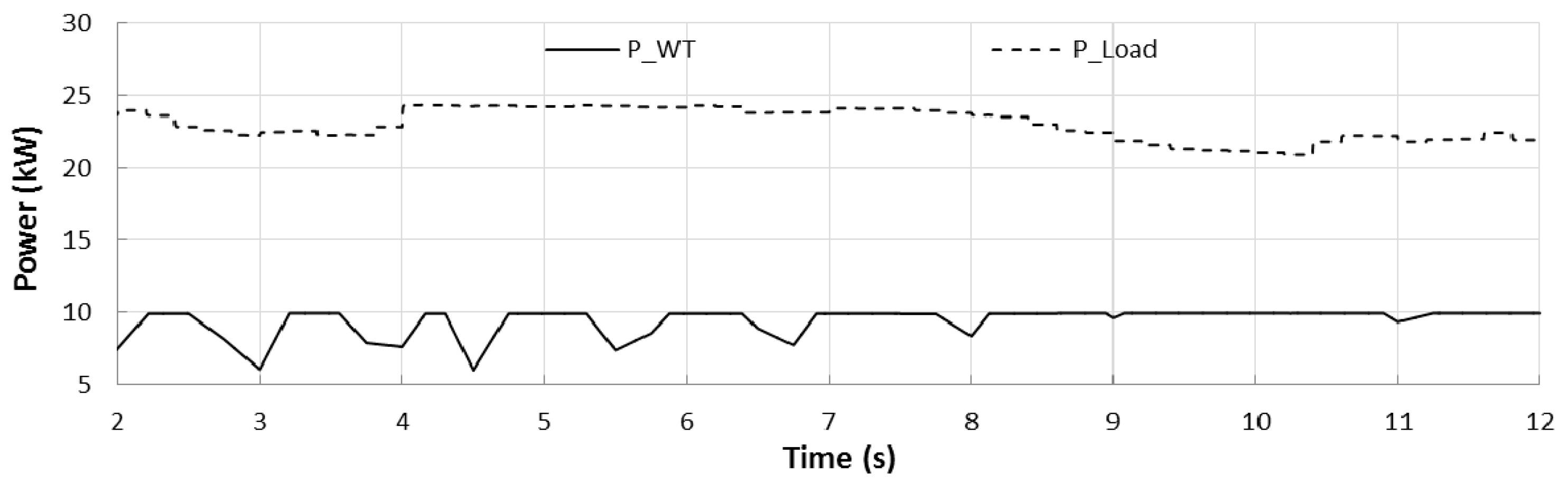
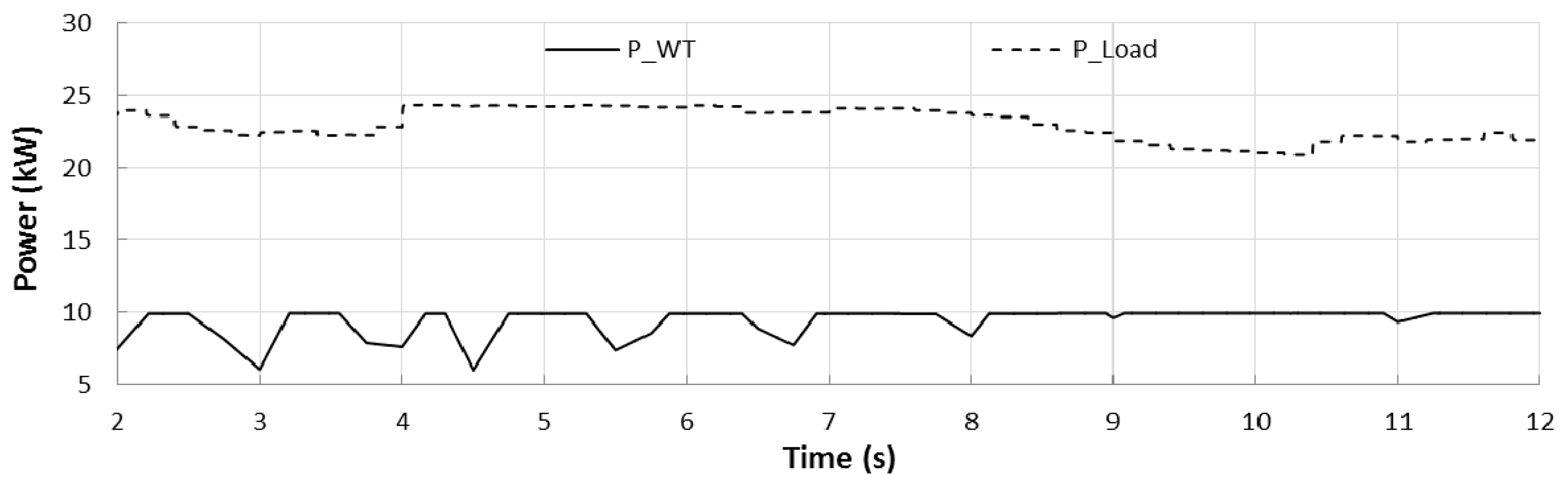
For all cases using different control methods, the output power of WT and the load is given as shown in
Figure 7. The power of WT varies from 6 to 10 kW and the load varies from 21 to 24 kW. The power of WT used in this study was extracted from the wind speed measured by the KERI in July 2010 and it was the maximum wind speed measured. The maximum wind speed was over 11.5 m/s, which is the rated wind speed. In the simulation, the output power over 10 kW was limited by the limiter in the simulation library. Since the forecasted value of the WT power and the load are 9 kW and 23 kW, respectively, the error occurred while calculating
Vcomp as mentioned in
Section 2.
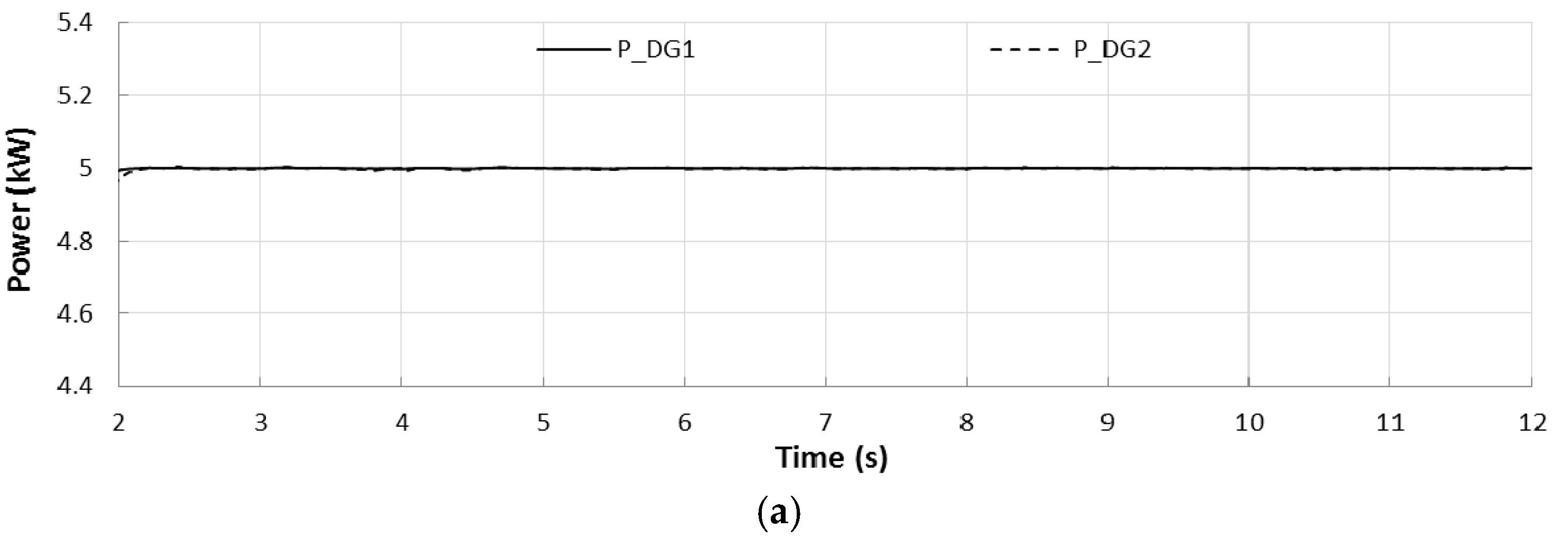
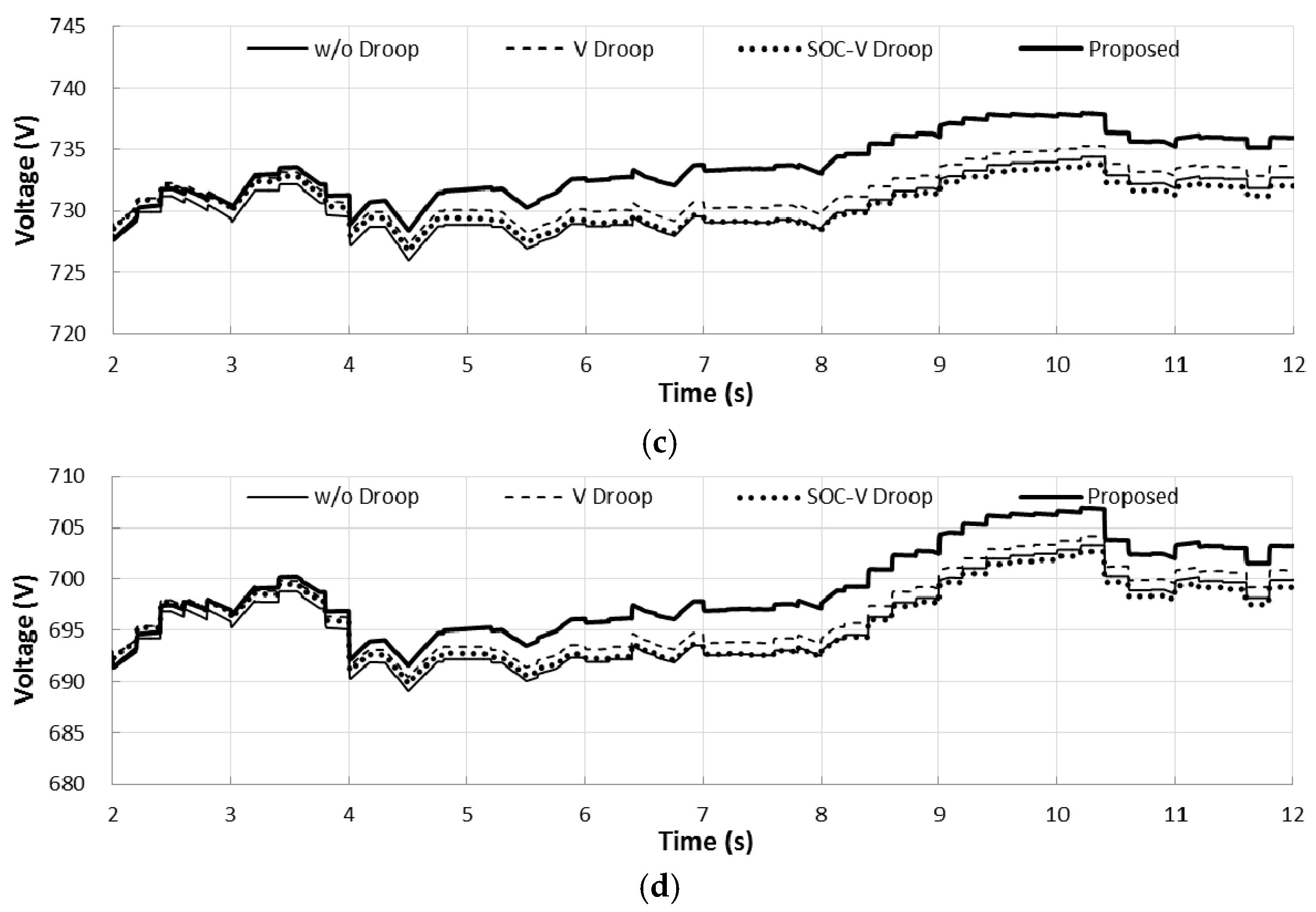
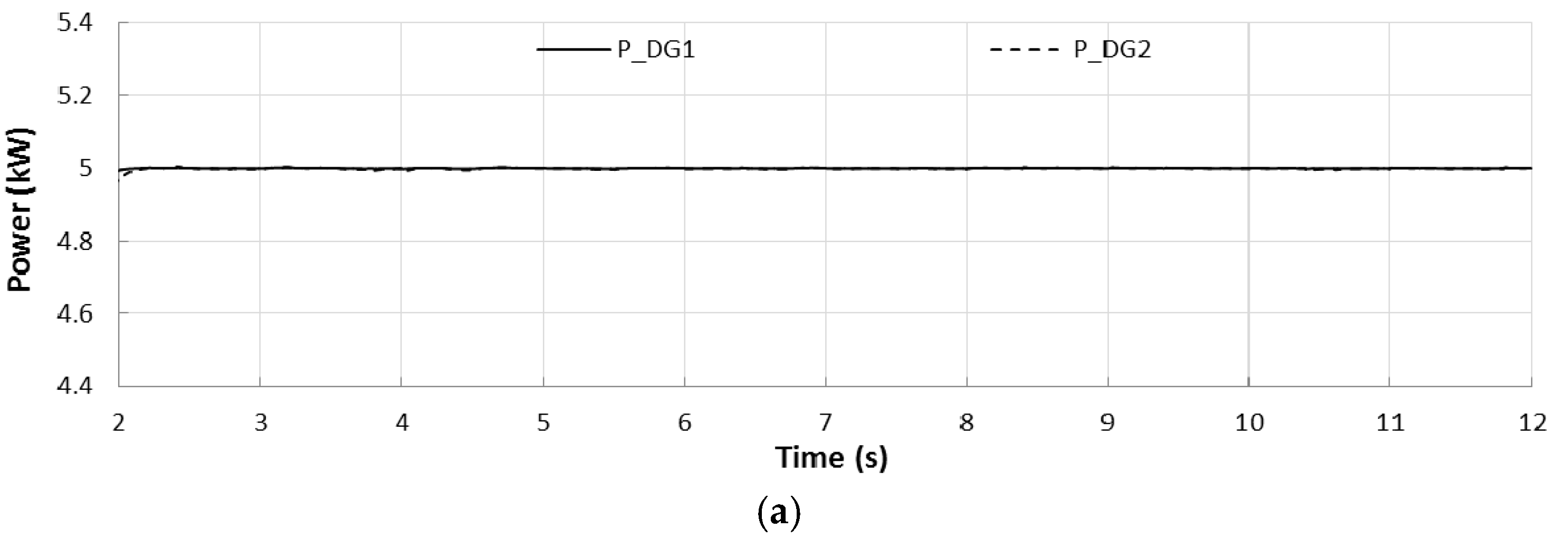
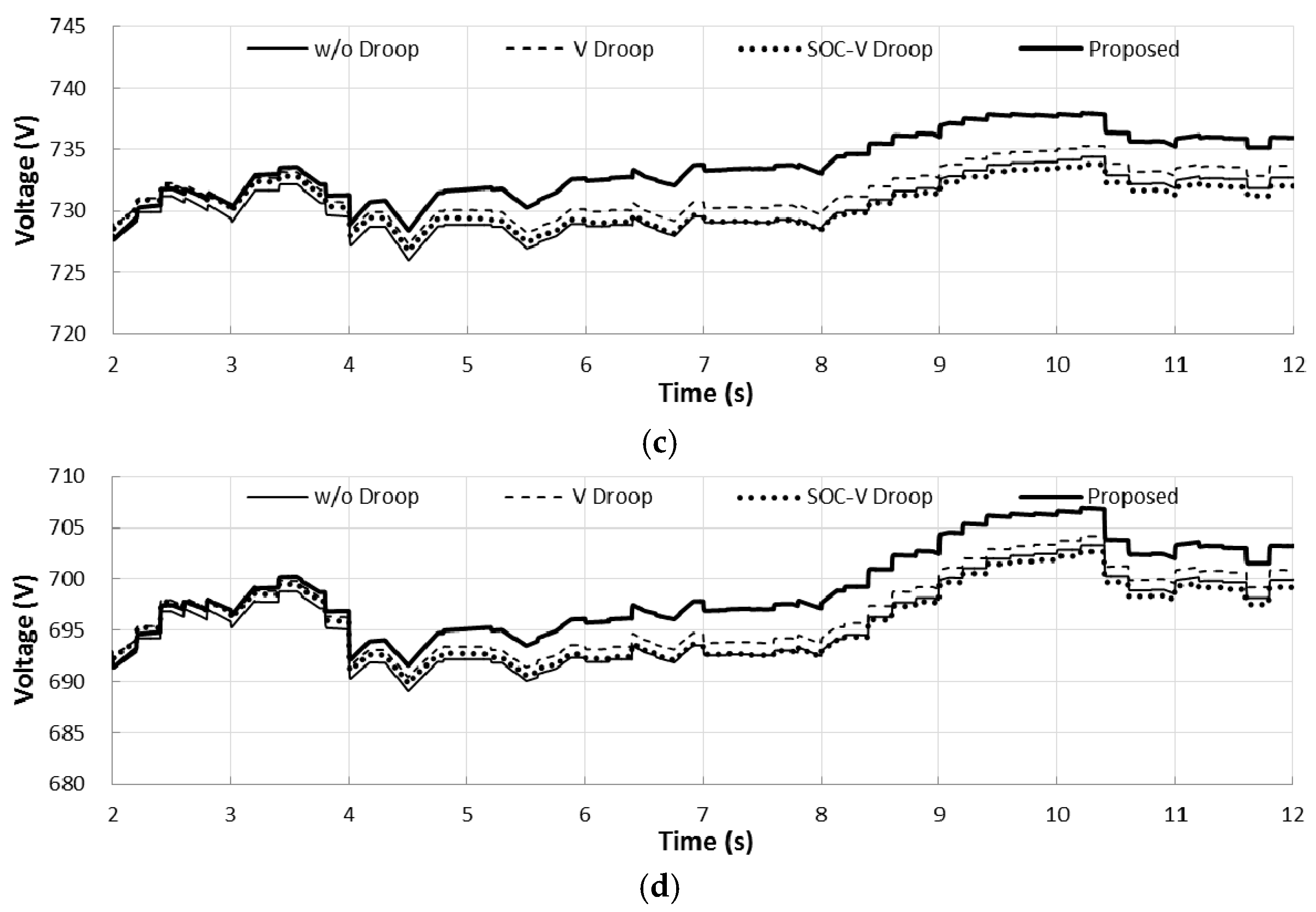
Figure 8 shows the output powers of DG1 and DG2 and
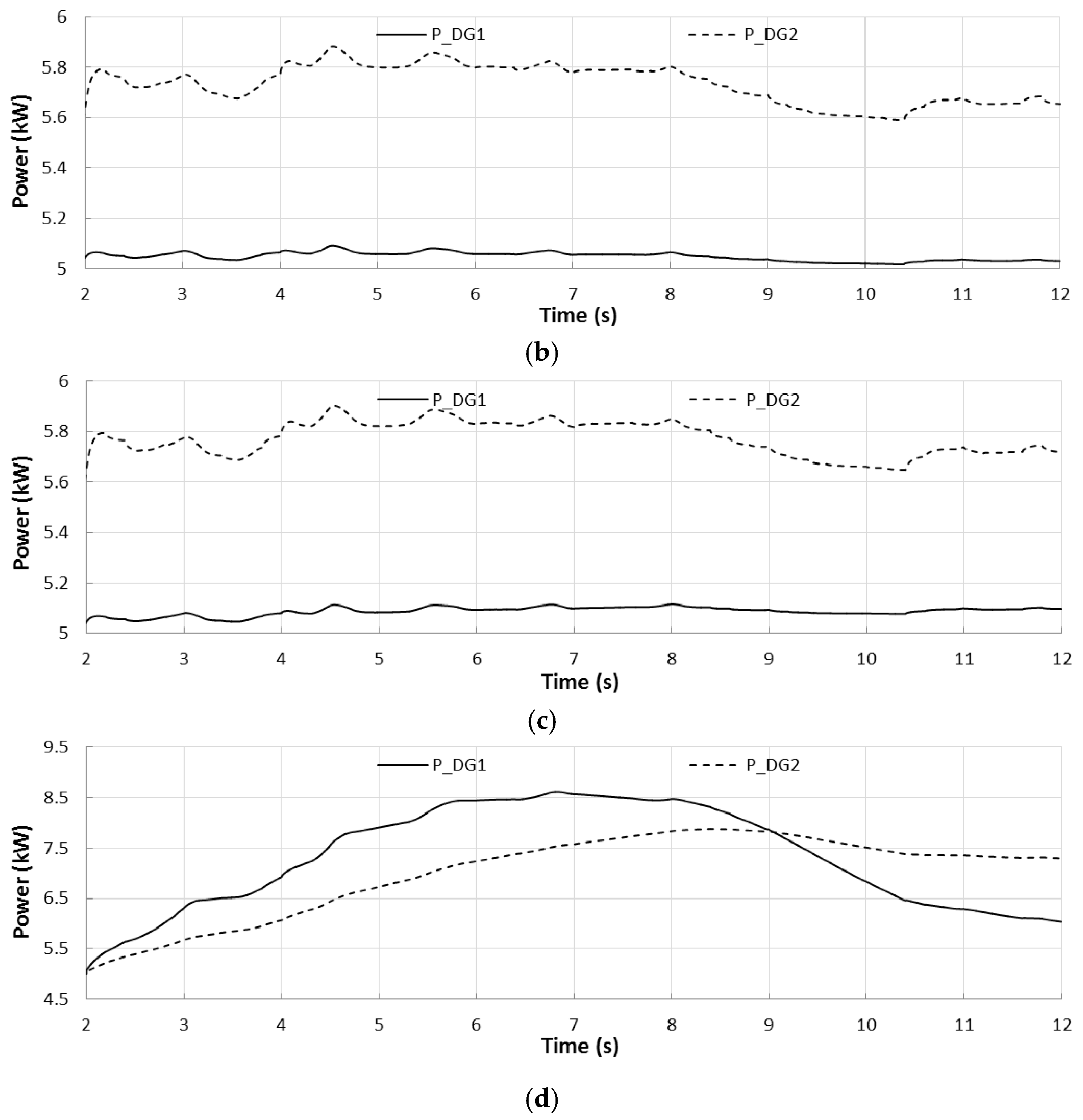
Figure 9 shows voltages at the ESS bus, DG1 bus, DG2 bus, and the load bus.
Figure 8a shows the output power of DGs without using droop method. Since both DGs are dispatched to output the same power (5 kW), they generate exactly the same amount of power. Even if the load and/or the WT power is changed, DGs do not support the voltage nor the
SOC. However, the power sharing ratio among them can be maintained exactly as desired.
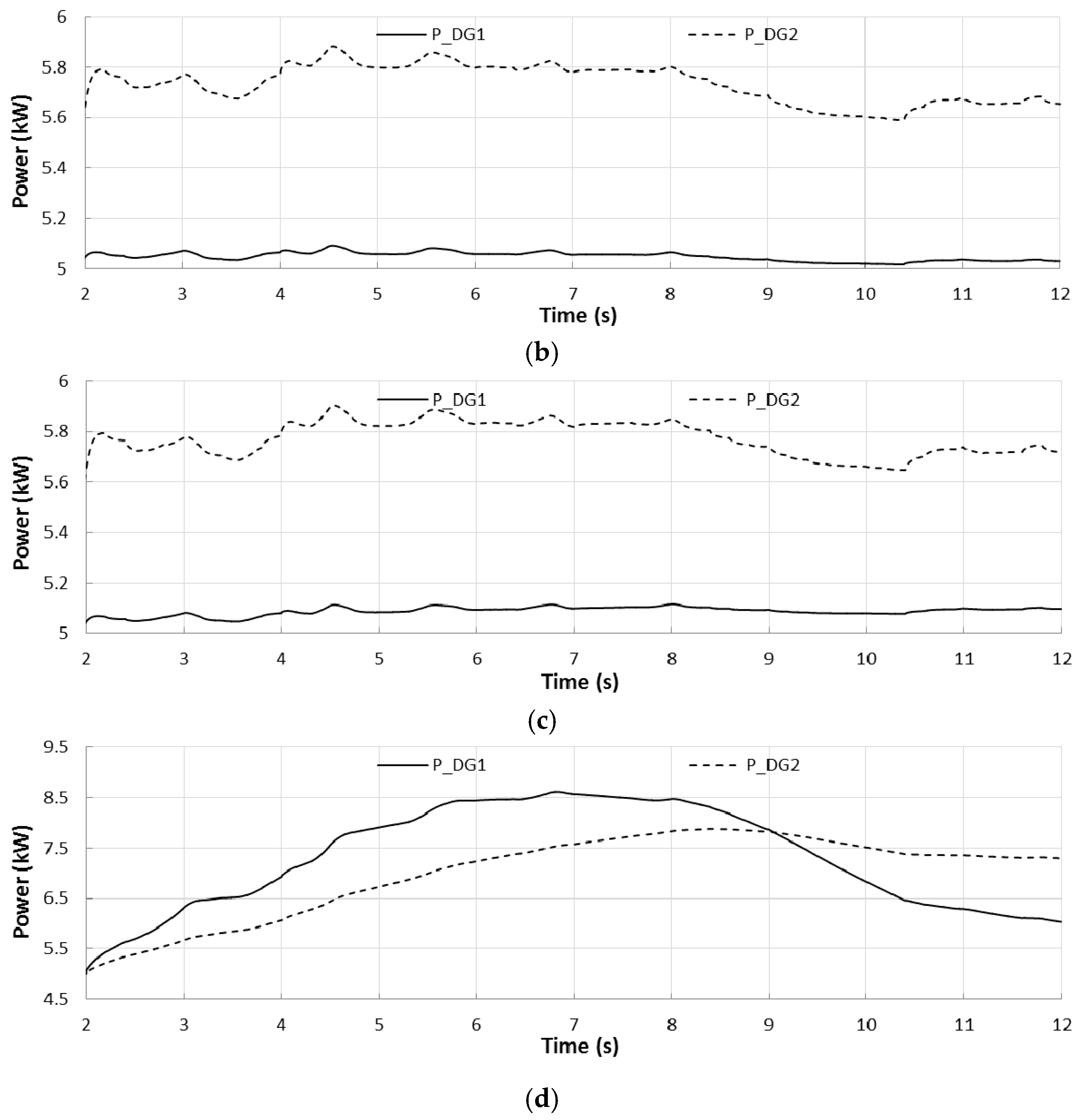
Figure 8b shows output of DGs using the voltage droop control method. Since DGs use voltage droop, they support the grid voltage and share power among them. DG2 injected more power than DG1 did because the voltage at DG2 (
Figure 9c) is lower than the voltage at DG1 (
Figure 9b).
Figure 8c shows output of DGs using the
SOC-voltage droop control method and it seems similar to
Figure 8b since DGs adopted voltage droop control method for both cases. However, as shown in
Figure 9a, the voltage of ESS was changed while using
SOC-voltage droop in order to reflect the
SOC change in the grid voltage, whereas it remained constant while using voltage droop control only. Due to applying
SOC-voltage droop, DG1 and DG2 injected more power into the grid (see
Figure 8c) than when applying voltage droop only (see
Figure 8b).
Figure 8d shows output powers of DGs using the proposed control method. The proposed control method is focused on the
SOC recovery rather than precise power sharing ratio, and hence the output power of DG1 and DG2 are not same. Instead, their output power sharing ratio can be adjusted to some extent by tuning the gains of PI
1 in
Figure 3. For instance, the gains of DG located further from the load should be set larger than that of DG located closer to the load. DG1 and DG2 using the proposed method output more power than three other control methods to recover the
SOC deviation. As shown in
Figure 9, the bus voltages are closer to the nominal value (750 V) while using the proposed method than the cases of using the other three control methods.
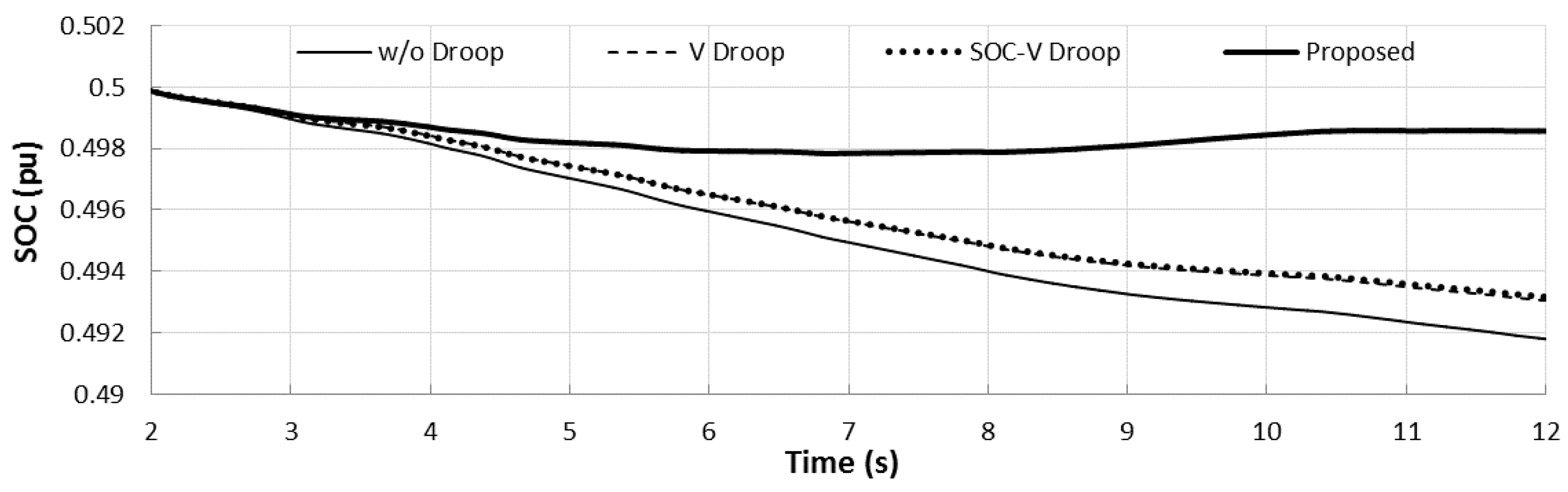
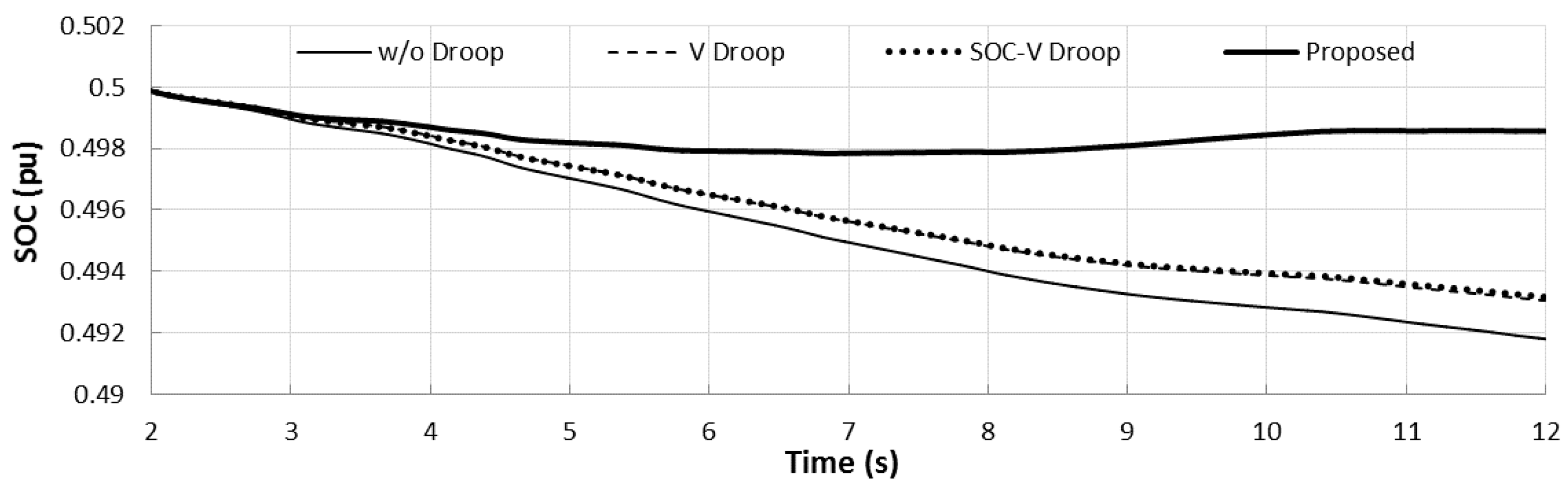
Figure 10 shows the
SOC for four different control methods. The control method without droop cannot prevent
SOC drop from the reference value (0.5 p.u. in this study) since it has no droop control. In the cases of “V Droop” and “
SOC-V Droop”, the results are similar. However, the
SOC is slightly closer to the reference value while using
SOC-voltage droop than using voltage droop only. By using the proposed method, the
SOC can be recovered drastically to the reference value as shown in
Figure 10. Consequently, the simulation results show that it is feasible for DGs to acquire
SOC information by measuring the grid voltage only, and hence the proposed method can recover the
SOC in a decentralized way.
5. Conclusions
This paper presents a novel control method for the ESS and the dispatchable DGs in an islanded DC microgrid. Typically, the ESS is controlled as a voltage control mode (usually in a decentralized control method) or as a current control mode in a centralized way. In a centralized control, charging/discharging command is transmitted from a central controller (or EMS); however a centralized control method degrades the system reliability due to its dependency on communication systems. In a decentralized control using the ESS as a voltage control mode, the ESS follows the load change, so it should be charged by other dispatchable DGs. However, in a decentralized control method, other DGs cannot acquire the SOC data. To solve this problem, SOC-voltage droop control method is applied to the ESS and the SOC compensation control is applied to the dispatchable DGs. By adopting SOC-voltage droop control to the ESS, the SOC information can be reflected in the grid voltage. Due to the line voltage drop, the SOC deviation data cannot be sent to the dispatchable DGs accurately. Hence, the voltage drop compensation is calculated based on a day-ahead load/generation forecasted data. With the voltage drop value and the measured bus voltage, the dispatchable DGs calculate the power to be output to recover the SOC to the reference value. Even though the amount of power sharing among DGs changes due to the SOC recovering control, it can be adjusted to some extent by tuning the gains of controllers. The simulation results show that the proposed method (which is a decentralized control method) is effective from the perspective of maintaining the SOC close to the desired level.
Still, the
SOC cannot be perfectly recovered to the reference value. This means further studies are needed in order to fully recover the
SOC. Moreover, in this study, since the simulation includes many switch devices (AC-DC and DC-DC converters), it requires a lot of computational memory. Hence, a simulation time of over one minute cannot be examined by using this type of simulation study. Another type of simulation study, such as power flow calculation, should be implemented to analyze a one-day (24 h) simulation. The other issue for future works is the power sharing accuracy. As shown in
Figure 8d, the power cannot be shared equally (or as desired). Hence, a proper power sharing method for the proposed control method should be developed as well. However, the proposed method can be used effectively for islanded DC microgrids with ESS controlled as a voltage source.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}