
Perturb and Observe Control for an Embedded Point Pivoted Absorber


 ,
,
Abstract
:1. Introduction
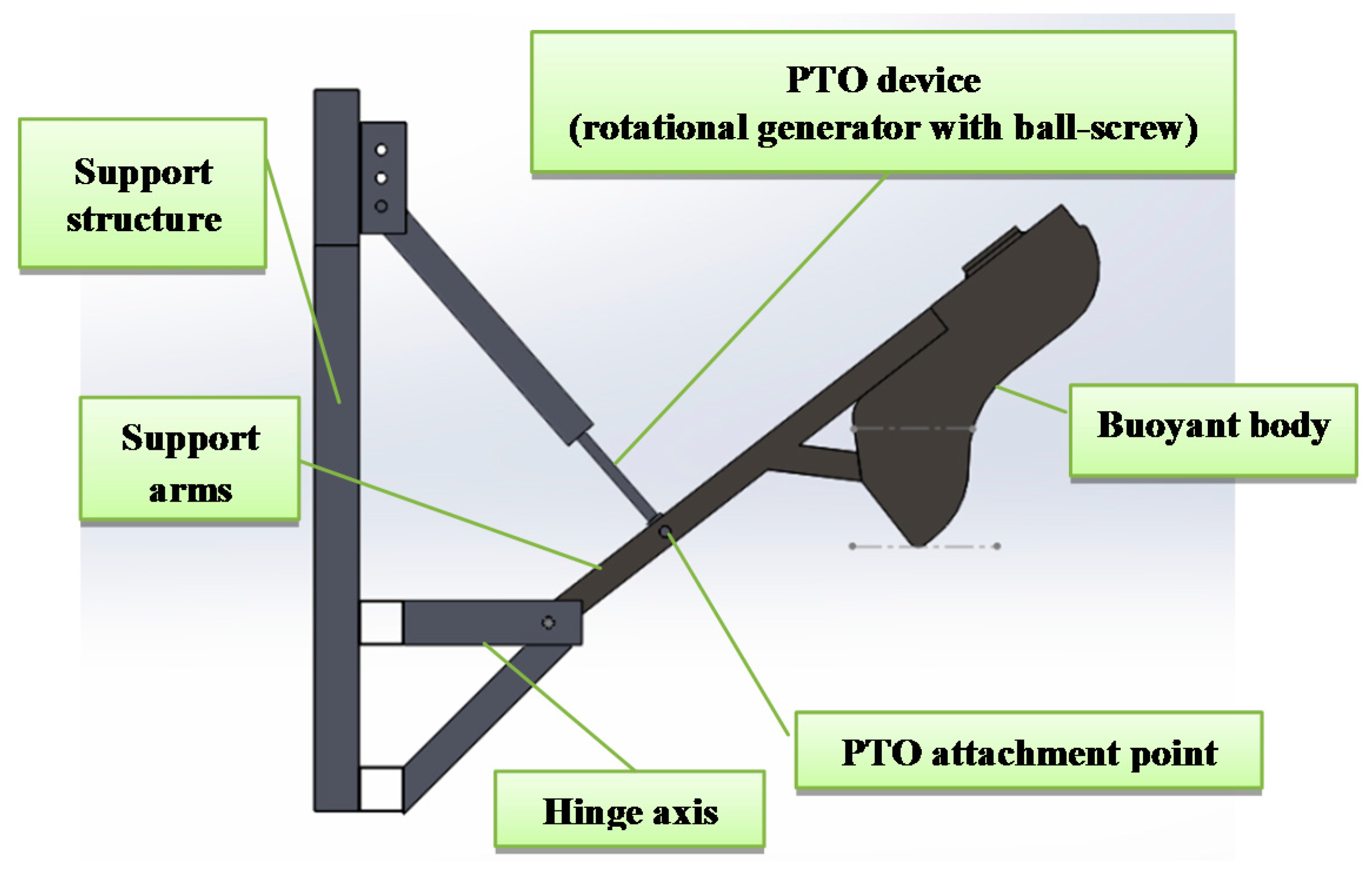
2. The Proposed Wave Energy Converter
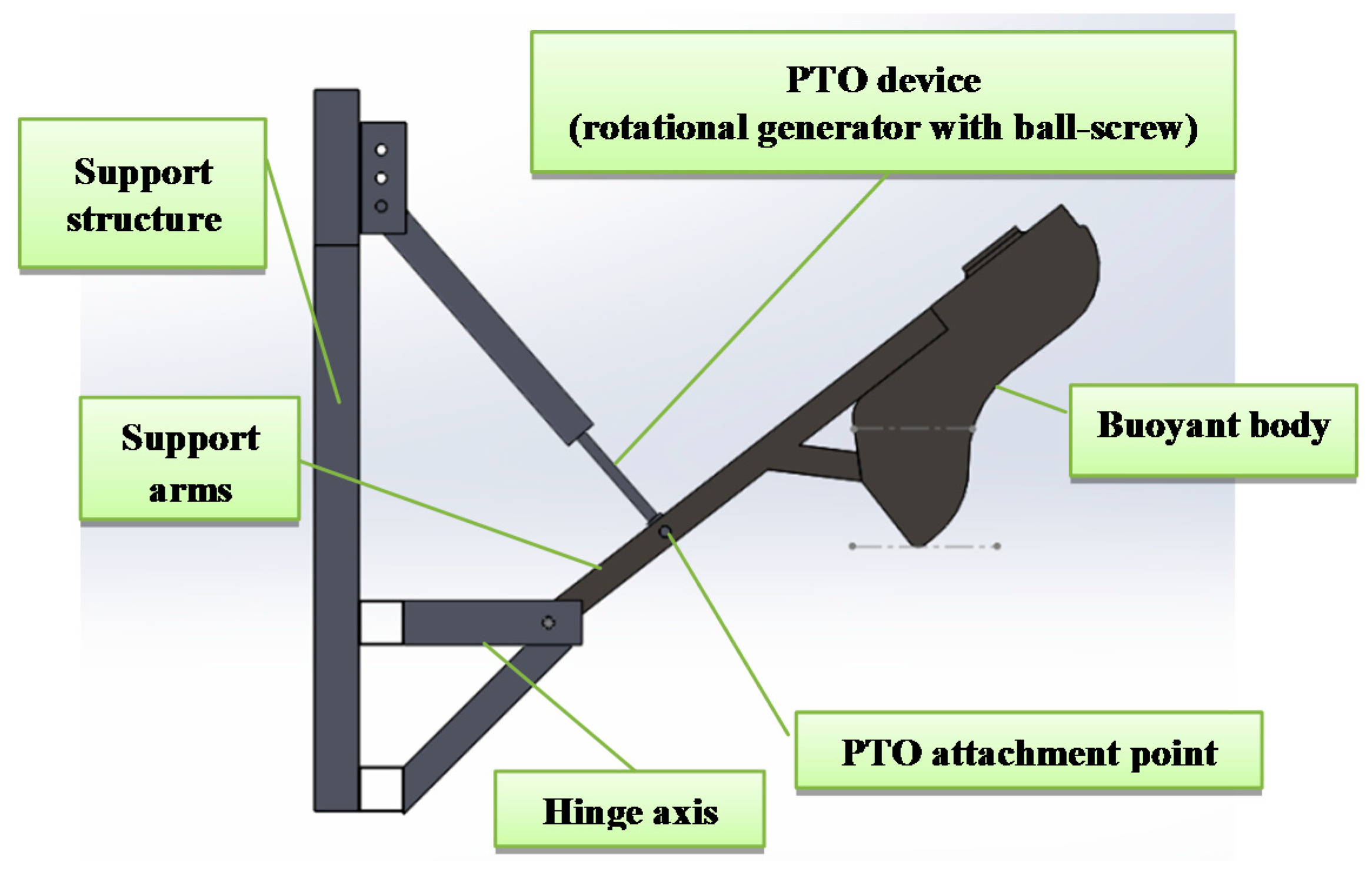
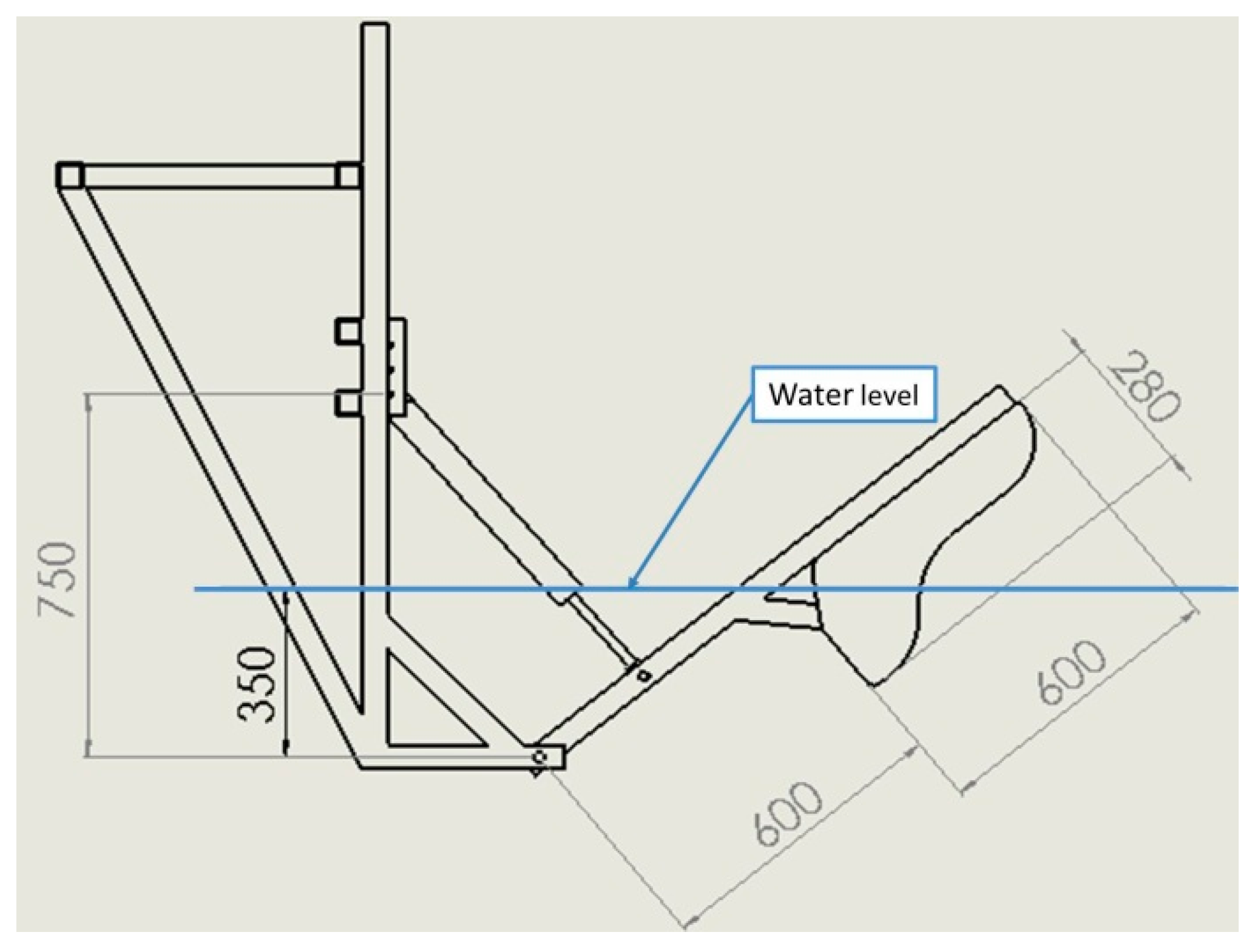
2.1. The Power Buoy
2.2. The Power Take Off
2.3. The Measurement Apparatus
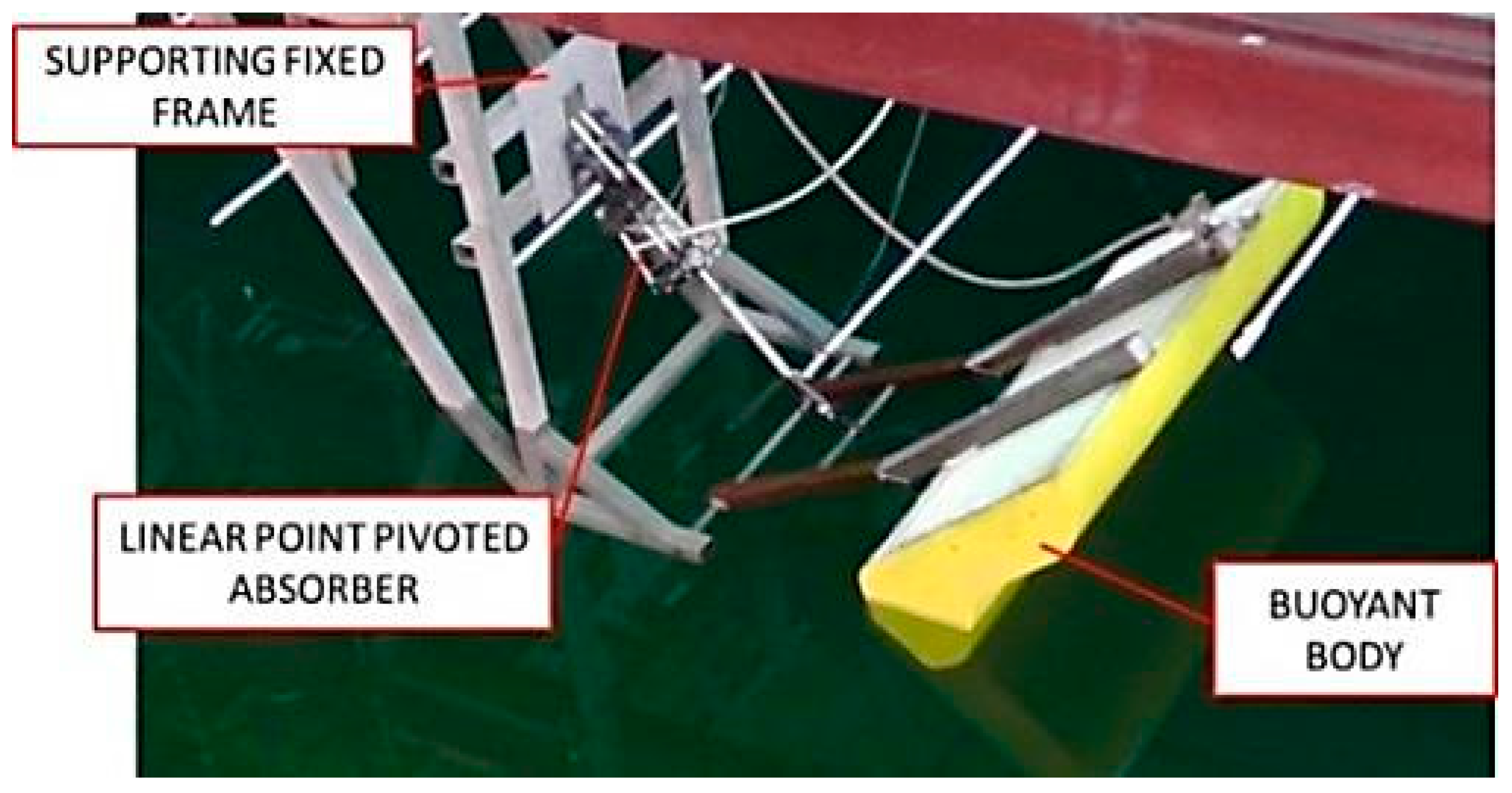
3. Experimental Test Bench
3.1. Towing Tank
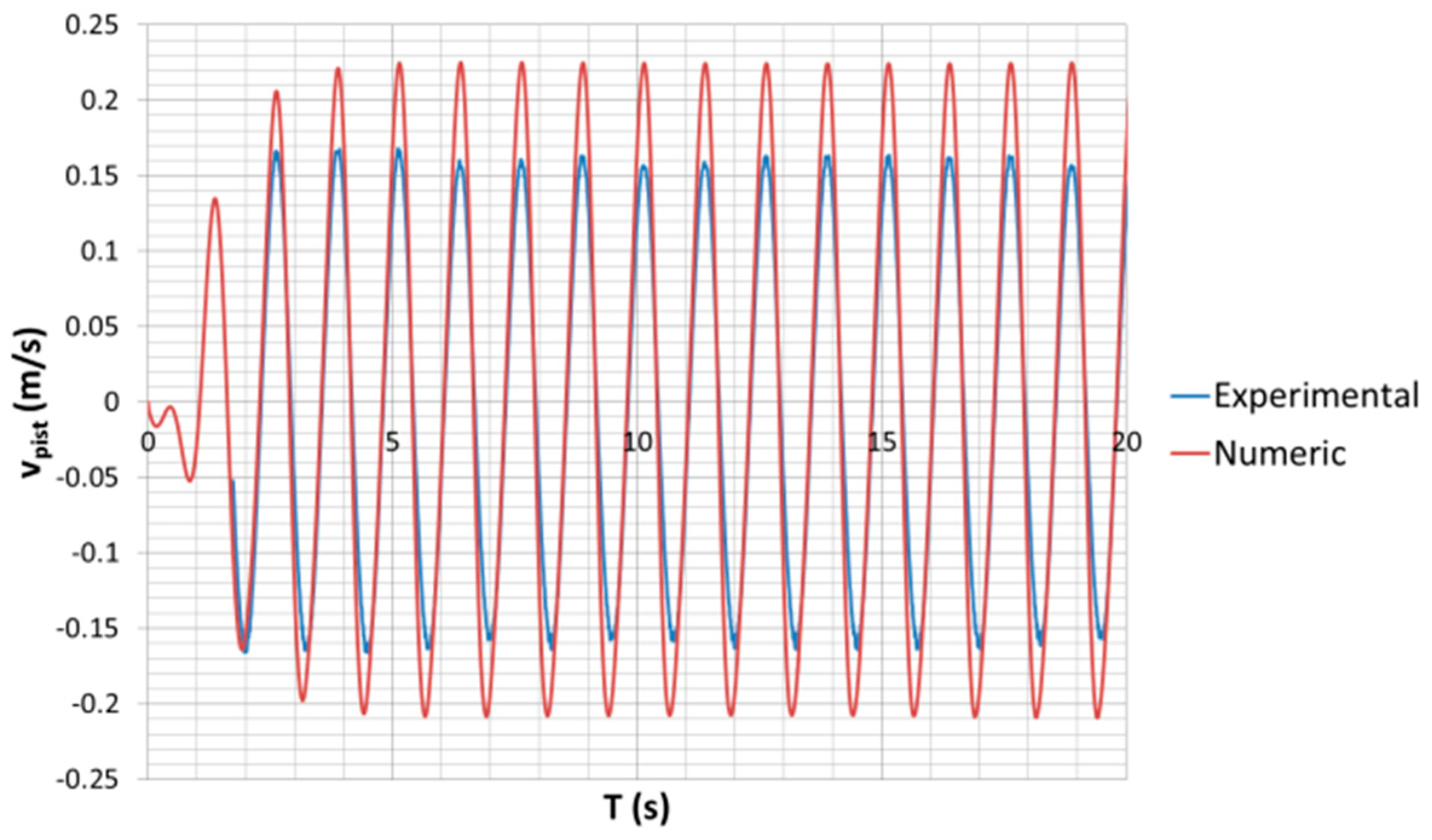
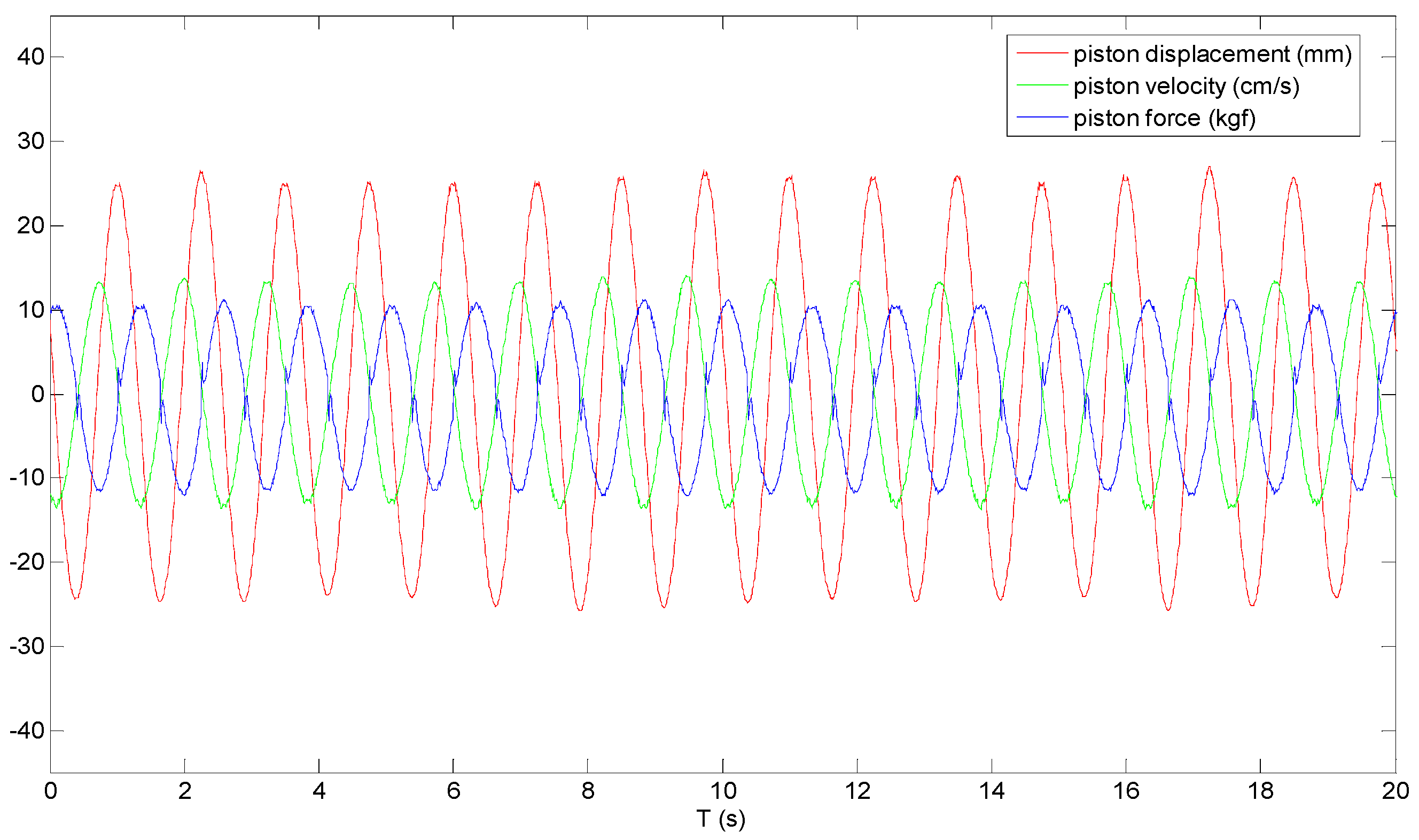
3.2. Experimental Results
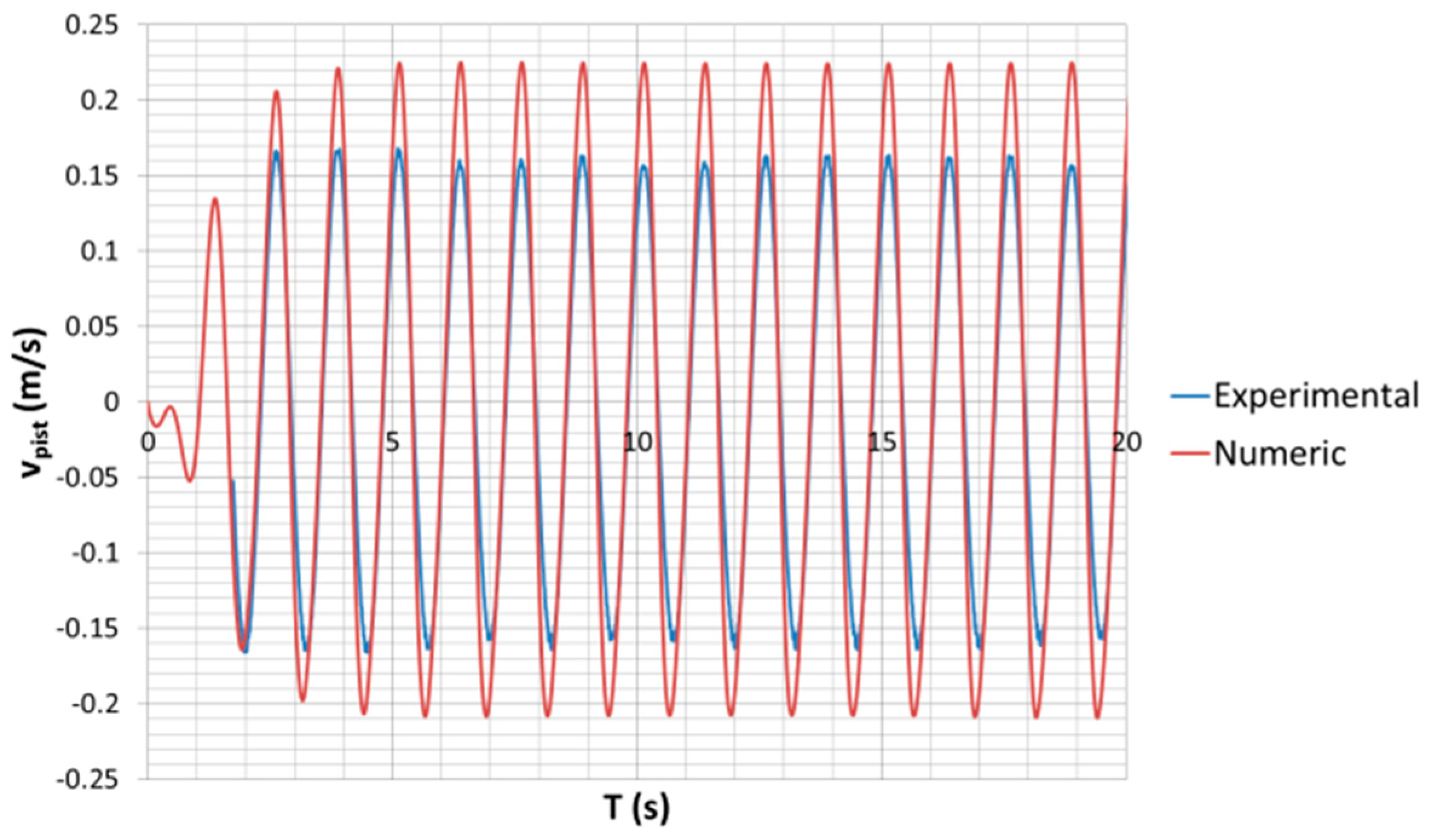
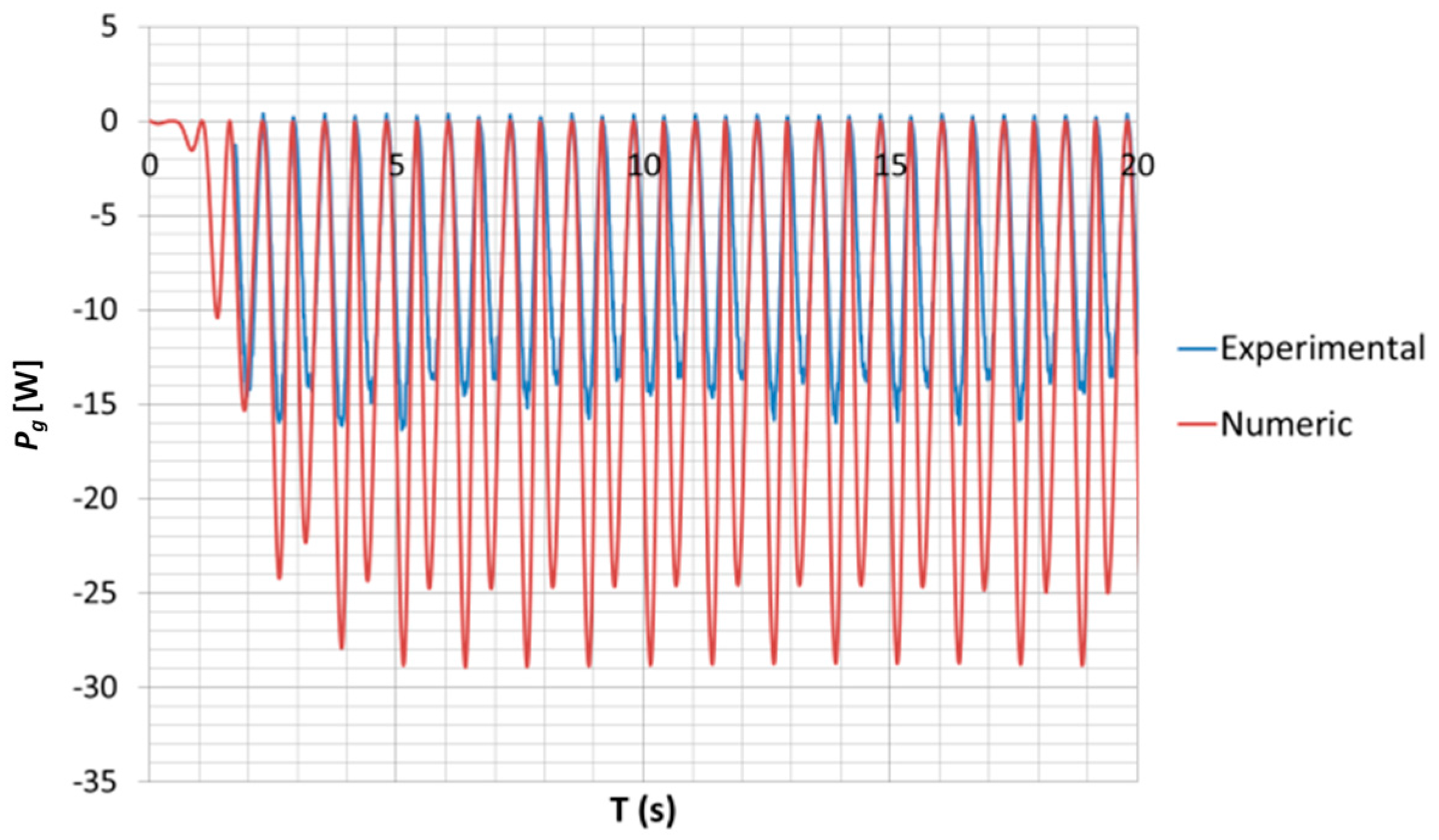
3.3. Buoy Oscillation Response Numerical Model
4. Control Strategies for Maximization of the Energy Harvesting from Wave Energy Converter
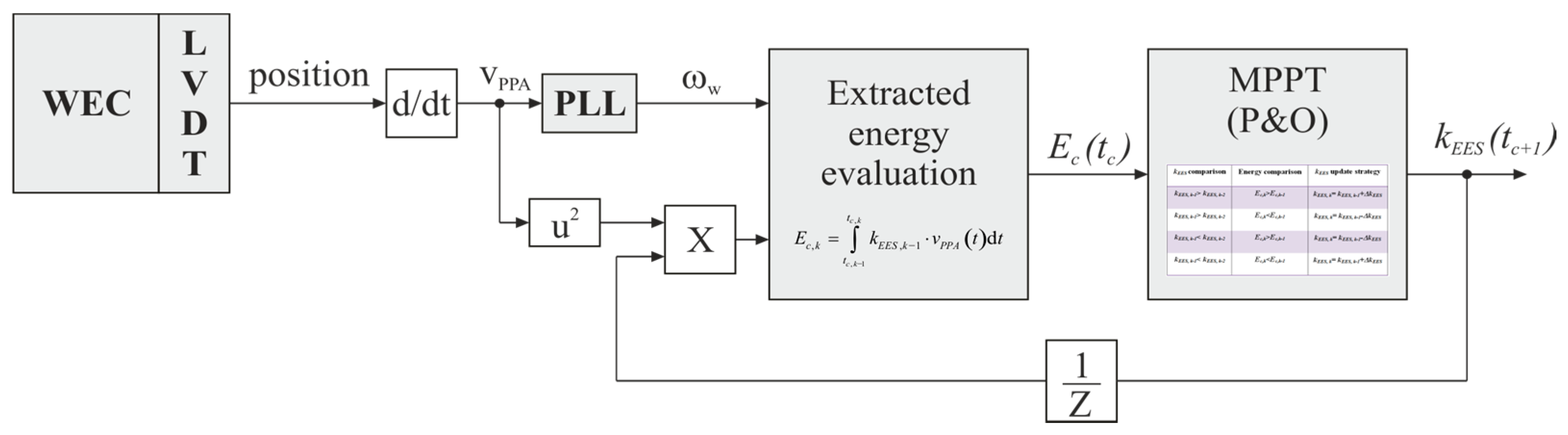
5. Proposed Control Strategy: Perturb and Observe
- (1)
- An initial value of is properly set based on the system size/power;
- (2)
- Afterwards, is updated in each control instant based on the proposed MPPT algorithm (see Table 3).
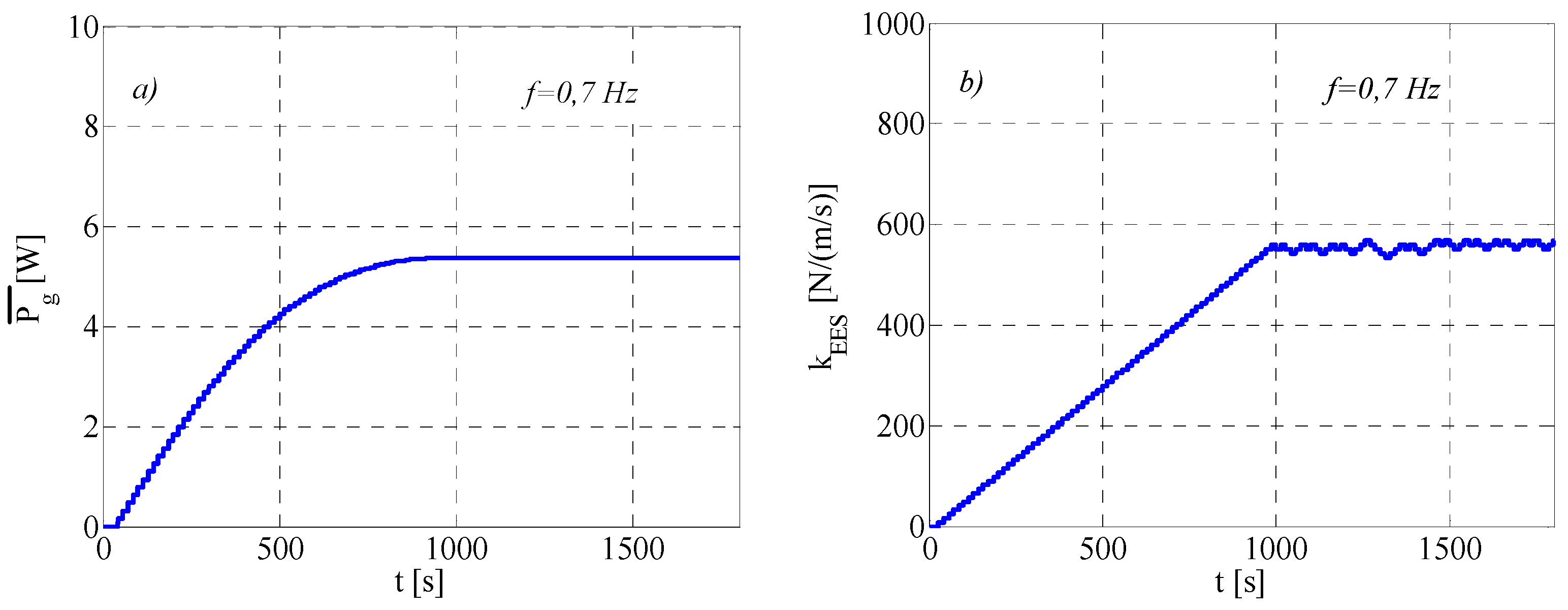
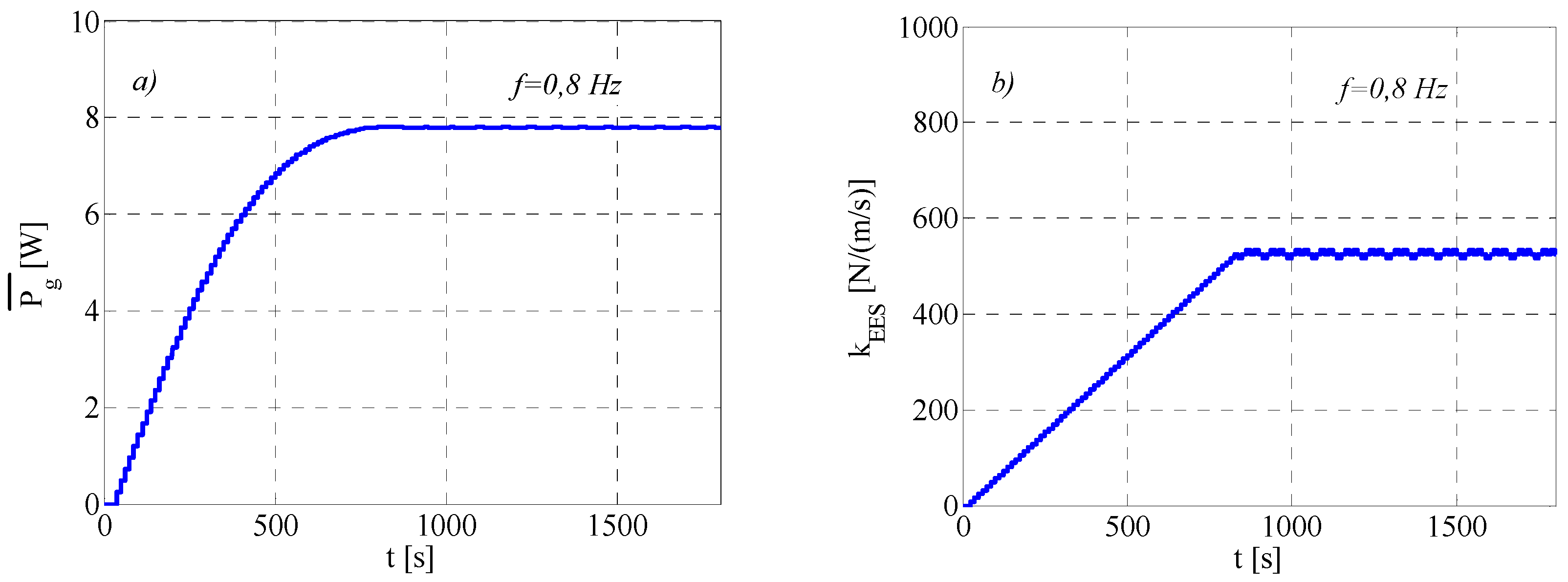
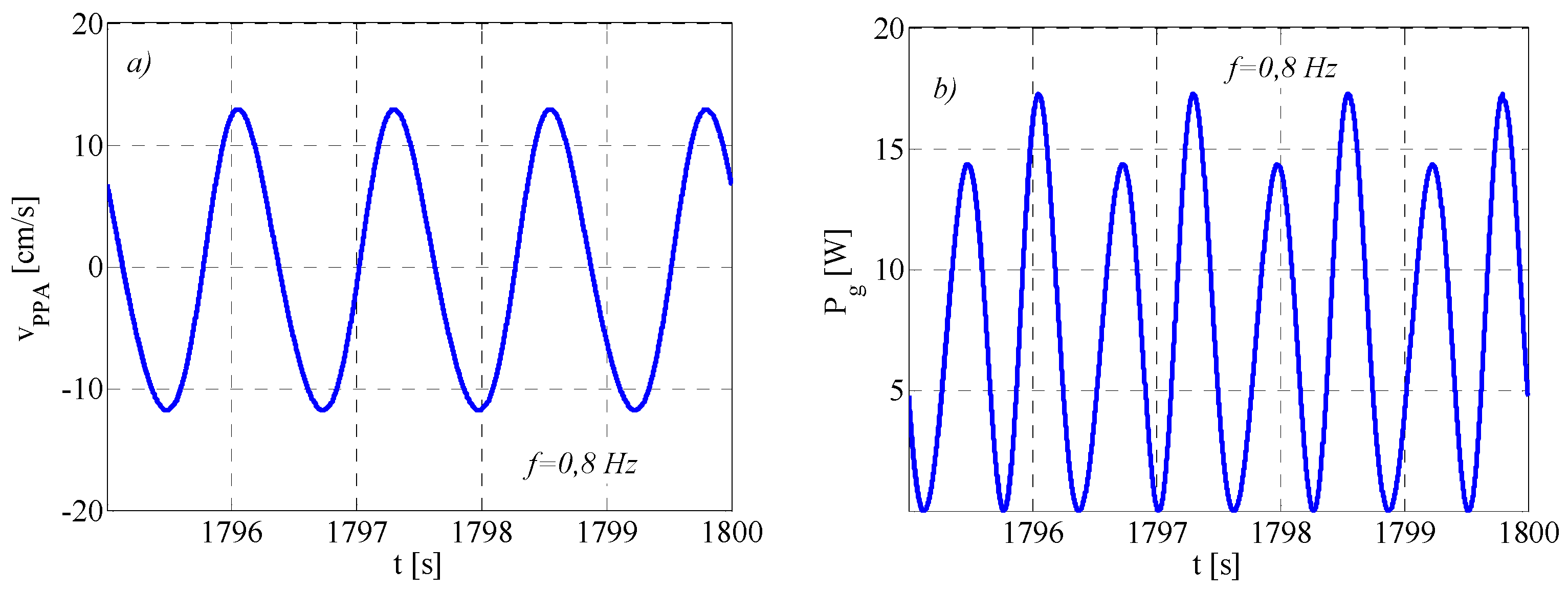
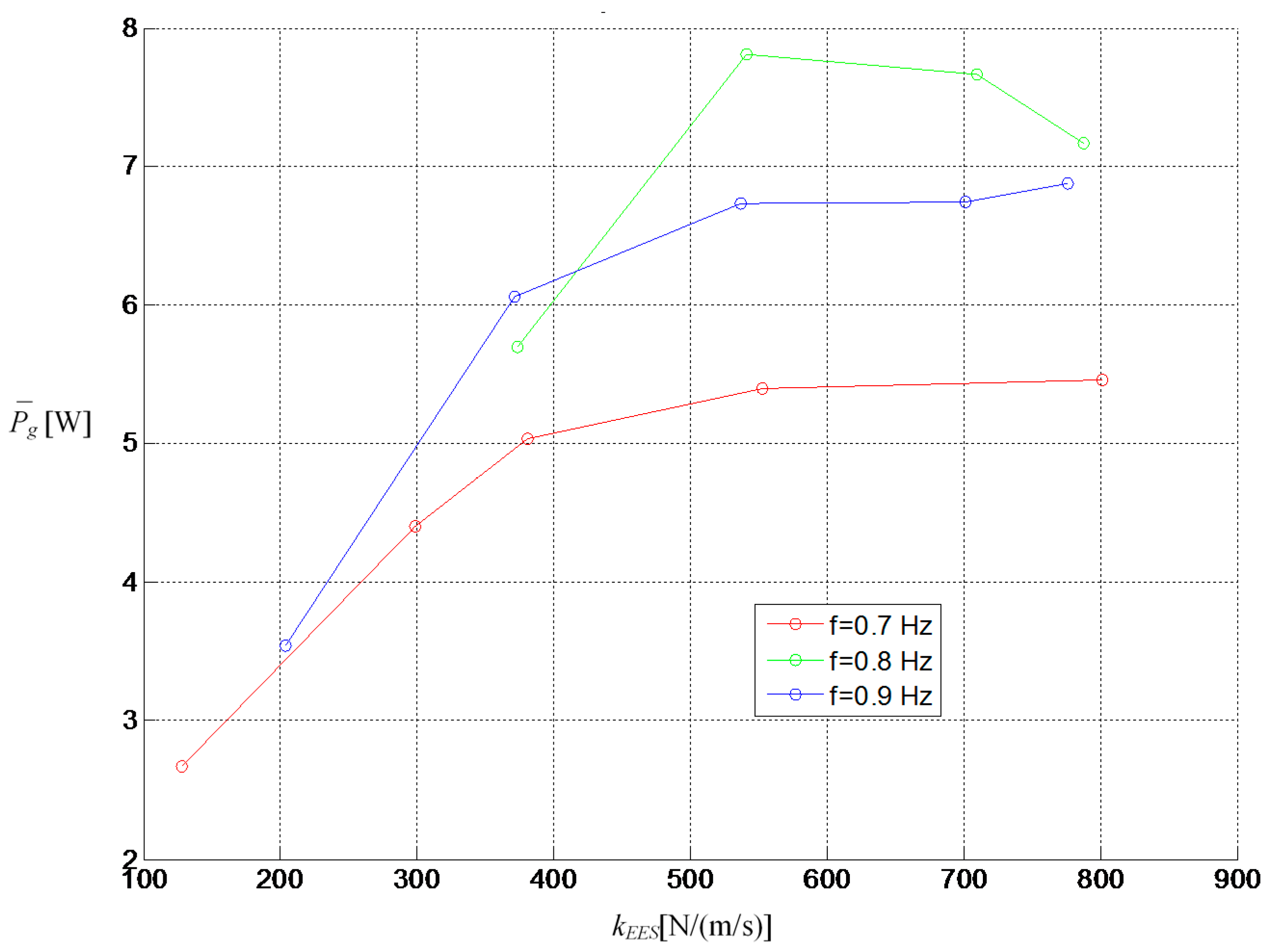
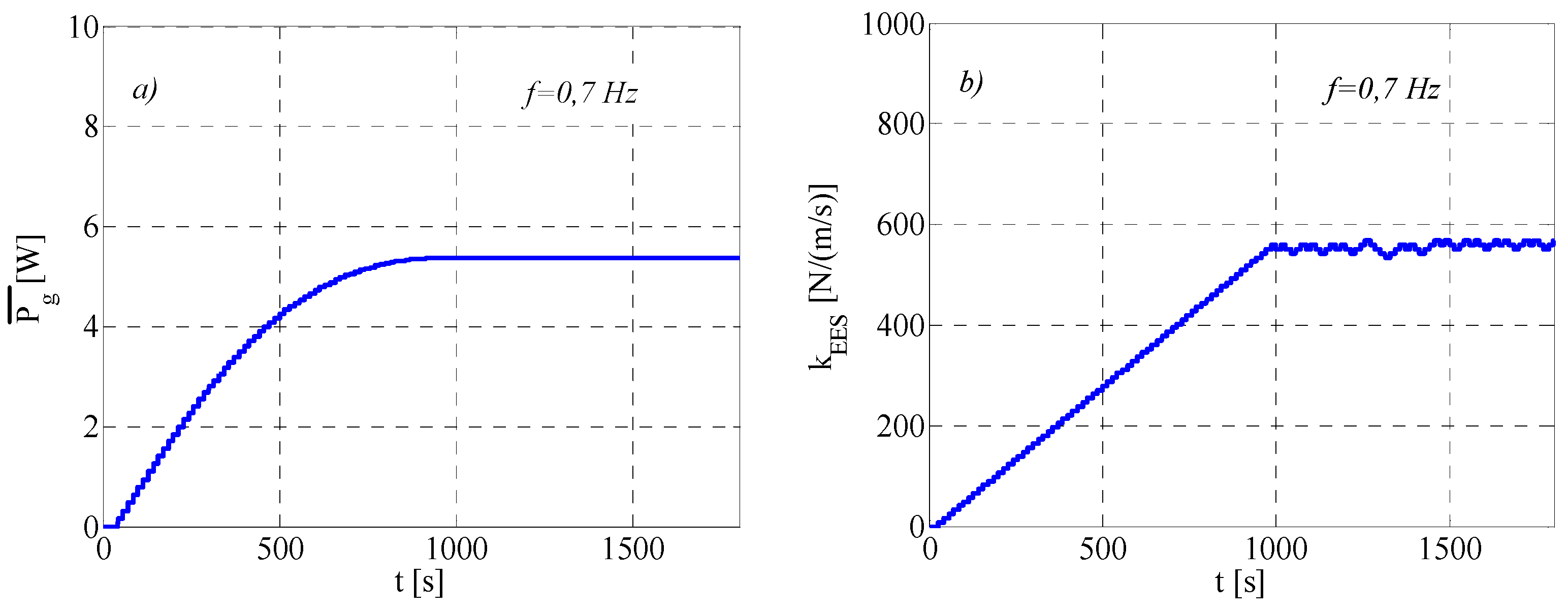
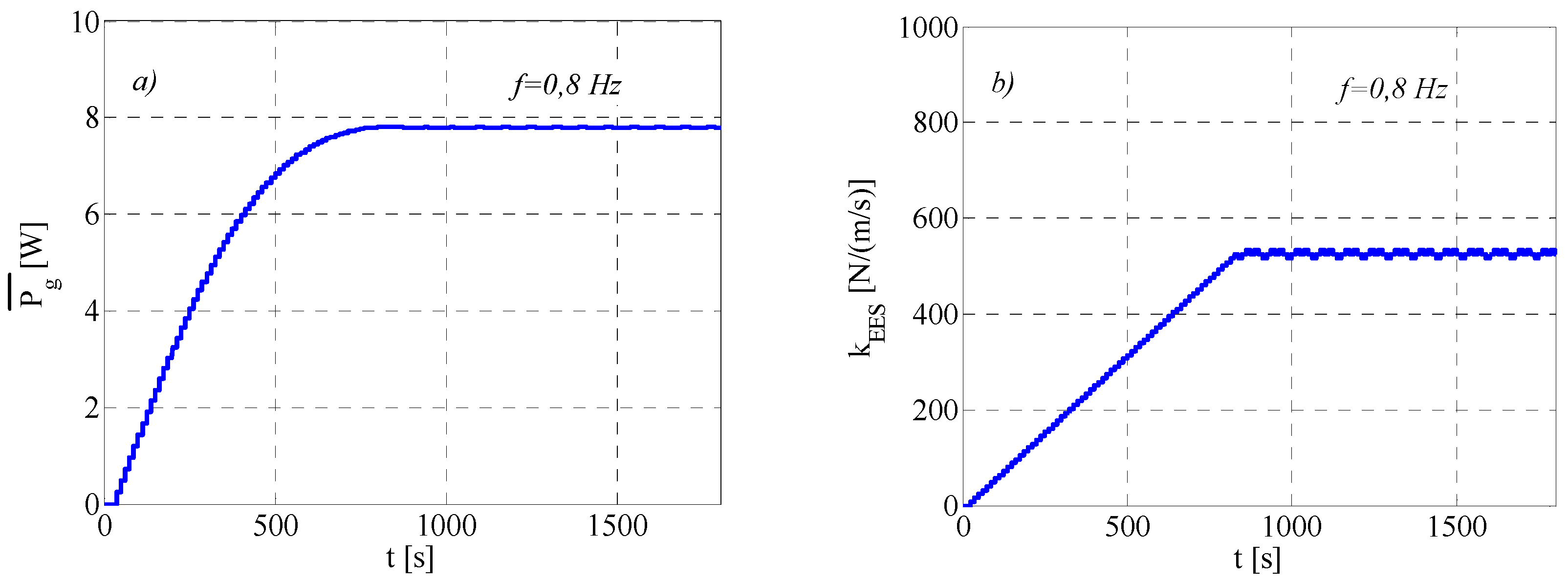
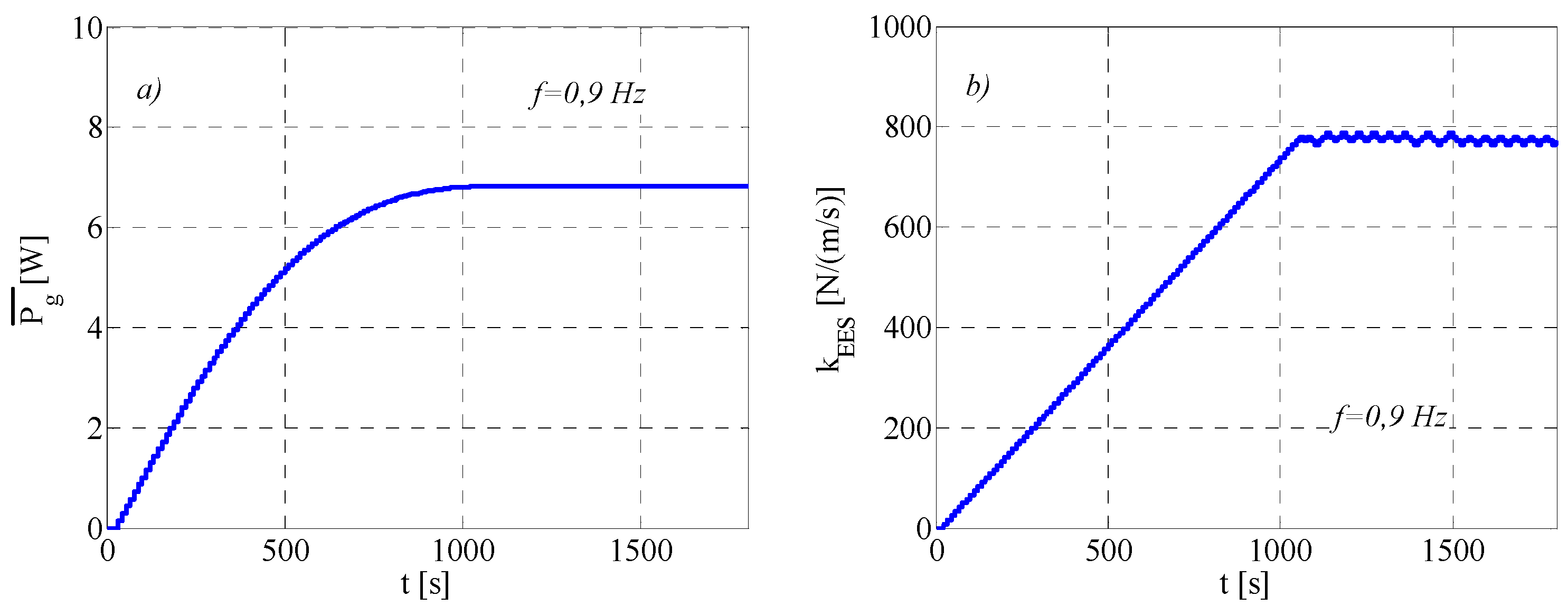
6. Numerical Results
7. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| Wave amplitude | |
| Energy extracted by the electric generator in the time interval | |
| Average stored energy per unit area of sea surface | |
| Wave frequency | |
| The force acting on PTO piston | |
| Acceleration of gravity (9.81 m/s2) | |
| Significant wave height | |
| Wave energy extraction strength | |
| Adjustable gain of the PTO | |
| The number of wave periods on which the time control interval is based | |
| Mean power of the incident wave | |
| Extracted average power from PTO | |
| Wave energy spectrum | |
| Generic control instant | |
| Control strategy time interval | |
| Wave period | |
| Wave group speed | |
| Piston speed | |
| Energy extraction strength step variation | |
| ρ | Mass density of sea water (1030 kg/m) |
References
- European Commission. Communication from the Commission—Guidelines on State aid for Environmental Protection and Energy 2014–2020. Available online: http://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A52014XC0628%2801%29 (accessed on 5 May 2016).
- Held, A.; Ragwitz, M.; Gephart, M.; de Visser, E. Design Features of Support Schemes for Renewable Electricity; Ecofys Consultancy: Utrecht, The Netherlands, 2014. [Google Scholar]
- Chiodo, E.; Lauria, D.; Pisani, C.; Villacci, D. Reliability aspects in wind farms design. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2012), Sorrento, Italy, 19–22 June 2012; pp. 577–581.
- Pisani, C.; Villacci, D.; Carlini, E.M.; Lauria, D. An integrated approach to improve the networks security in presence of high penetration of RES. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2014), Ischia, Italy, 20–22 June 2014.
- Low Carbon Technologies. Available online: https://ec.europa.eu/clima/policies/lowcarbon/index_en.htm (accessed on 11 May 2016).
- Chiodo, E.; Lauria, D.; Pisani, C.; Villacci, D. Wind farm production estimation under multivariate wind speed distribution. In Proceedings of the International Conference on Clean Electrical Power (ICCEP 2013), Alghero, Italy, 11–13 June 2013; pp. 745–750.
- Nathalie, R. Oceans of Energy: European Ocean Energy Roadmap 2010–2050; The International Conference on Ocean Energy (ICOE): Bilbao, Spain, 2010. [Google Scholar]
- Falnes, J. A review of wave-energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Ross, D. Power from Sea Waves; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Cruz, J. (Ed.) Ocean Wave Energy; Springer: Berlin, Germany, 2008.
- Mehrubeoglu, M.; McLauchlan, L.; Karayaka, B. Ocean Energy Conversion and Storage Prototypes for Wave, Current and Tidal Energy Generators. In Proceedings of the Green Technologies Conference (GreenTech), Corpus Christi, TX, USA, 3–4 April 2014.
- Carli, F.M.; Bonamano, S.; Marcelli, M.; Peviani, M.A. Existing Technologies for Marine Energy Production and Potentialities of Development along the Italian Coasts. In Proceedings of the Offshore Wind and Other Marine Renewable Energies in Mediterranean and European Seas (OWEMES), Brindisi, Italy, 21–23 May 2009.
- Antonio, F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Vantorre, M.; Banasiak, R.; Verhoeven, R. Modelling of hydraulic performance and wave energy extraction by a point absorber in heave. Appl. Ocean Res. 2004, 26, 61–72. [Google Scholar] [CrossRef]
- Hager, R.; Fernandez, N.; Teng, M.H. Experimental study seeking optimal geometry of a heaving body for improved power absorption efficiency. In Proceedings of the 22nd International Offshore and Polar Engineering Conference (ISOPE-2012), Rhodes, Greece, 17–22 June 2012.
- Hardisty, J. Experiments with point absorbers for wave energy conversion. J. Mar. Eng. Technol. 2012, 11, 51–62. [Google Scholar]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M.M. Non-linear numerical modelling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Ionescu, D.; Ngwenya, B.S. Innovative design of a sea wave energy harnesser. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ’14), Cordoba, Spain, 7–10 April 2014.
- Hansen, R.H.; Kramer, M.M.; Vidal, E. Discrete displacement hydraulic power take-off system for the Wavestar wave energy converter. Energies 2013, 6, 4001–4044. [Google Scholar] [CrossRef]
- Zhou, Z.; Benbouzid, M.; Charpentier, J.F.; Scuiller, F.; Tang, T. Energy Storage Technologies for Smoothing Power Fluctuations in Marine Current Turbines. In Proceedings of the International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1425–1430.
- Borgarino, B.; Multon, B.; Ahmed, H.B.; Aubry, J.; Bydlowski, P. Energy Storage System Sizing for Smoothing Power Generation of direct Wave Energy Converters. In Proceedings of the International Conference on Ocean Energy, Bilbao, Spain, 6–8 October 2010.
- Manchester, S.; Barzegar, B.; Swan, L.; Groulx, D. Energy storage requirements for in-stream tidal generation on a limited capacity electricity grid. Energy 2013, 61, 283–290. [Google Scholar] [CrossRef]
- Piegari, L.; Rizzo, R.; Spina, I.; Tricoli, P. Optimized adaptive perturb and observe maximum power point tracking control for photovoltaic generation. Energies 2015, 8, 3418–3436. [Google Scholar] [CrossRef]
- Brando, G.; Dannier, A.; del Pizzo, A.; di Noia, L.P.; Pisani, C. Grid connection of wave energy converter in heaving mode operation by supercapacitor storage technology. IET Renew. Power Gener. 2016, 10, 88–97. [Google Scholar] [CrossRef]
- Van Zyl, A.W.; Jeans, C.G.; Cruise, R.J.; Landy, C.F. Comparison of force-to-weight ratios between a single-sided linear synchronous motor and a tubular linear synchronous motor. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC ’99), Seattle, WA, USA, 9–12 May 1999.
- Coiro, D.P.; Troise, G.; Calise, G.; Bizzarrini, N. Wave energy conversion through a point pivoted absorber: Numerical and experimental tests on a scaled model. Renew. Energy 2016, 87, 317–325. [Google Scholar] [CrossRef]
- Sakr, A.H.; Anis, Y.H.; Metwalli, S.M. System frequency tuning for heaving buoy wave energy converters. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Pusan, Korea, 7–11 July 2015; pp. 1367–1372.
- Hazra, S.; Bhattacharya, S. Control of squirrel cage induction generator in an oscillating point absorber based wave energy conversion system. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition (APEC 2014), Fort Worth, TX, USA, 16–20 March 2014; pp. 3174–3180.
- Sharaf, A.M.; El-Gammal, A.A. Optimal Variable Structure Self Regulating PSO-Controller for Stand-Alone Wave Energy Conversion Scheme. In Proceedings of the 2010 Fourth Asia International Conference on Mathematical/Analytical Modelling and Computer Simulation, Kota Kinabalu, Malaysia, 26–28 May 2010; pp. 438–443.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Dimensions of the WEC | Dimension | Unit |
|---|---|---|
| Body height | 0.6 | m |
| Body width | 1.0 | m |
| Body weight (body + arms) | 32.5 | kg |
| Hinge moment of inertia (body + arms) | 21.65 | kg·m2 |
| Draft | 0.2 | m |
| Body section at water level | 0.21 | m2 |
| Immersed volume | 0.0325 | m3 |
| AC Brushless with Ball-Screw | Value | Unit |
|---|---|---|
| Power | 20 | kVA |
| Maximum Speed | 1200 | rpm |
| Maximum Frequency | 60 | Hz |
| Rated Voltage | 460 | V |
| Rated Current | 30 | A |
| Efficiency | 0.93 | - |
| Pole pairs | 3 | - |
| External Diameter | 0.28 | m |
| Magnetic stack length | 0.15 | m |
| kEES Comparison | Energy Comparison | kEES Update Strategy |
|---|---|---|
| kEES,k−1 > kEES,k−2 | Ec,k > Ec,k−1 | kEES,k = kEES,k−1 + ΔkEES |
| kEES,k−1 > kEES,k−2 | Ec,k < Ec,k−1 | kEES,k = kEES,k−1 − ΔkEES |
| kEES,k−1 < kEES,k−2 | Ec,k > Ec,k−1 | kEES,k = kEES,k−1 − ΔkEES |
| kEES,k−1 < kEES,k−2 | Ec,k < Ec,k−1 | kEES,k = kEES,k−1 + ΔkEES |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brando, G.; Coiro, D.P.; Coppola, M.; Dannier, A.; Del Pizzo, A.; Spina, I. Perturb and Observe Control for an Embedded Point Pivoted Absorber. Energies 2016, 9, 939. https://doi.org/10.3390/en9110939
Brando G, Coiro DP, Coppola M, Dannier A, Del Pizzo A, Spina I. Perturb and Observe Control for an Embedded Point Pivoted Absorber. Energies. 2016; 9(11):939. https://doi.org/10.3390/en9110939
Chicago/Turabian StyleBrando, Gianluca, Domenico Pietro Coiro, Marino Coppola, Adolfo Dannier, Andrea Del Pizzo, and Ivan Spina. 2016. "Perturb and Observe Control for an Embedded Point Pivoted Absorber" Energies 9, no. 11: 939. https://doi.org/10.3390/en9110939