
Numerical Study on Self-Starting Performance of Darrieus Vertical Axis Turbine for Tidal Stream Energy Conversion


Abstract
:1. Introduction
2. Self-Starting of Darrieus VAT
3. Numerical Model
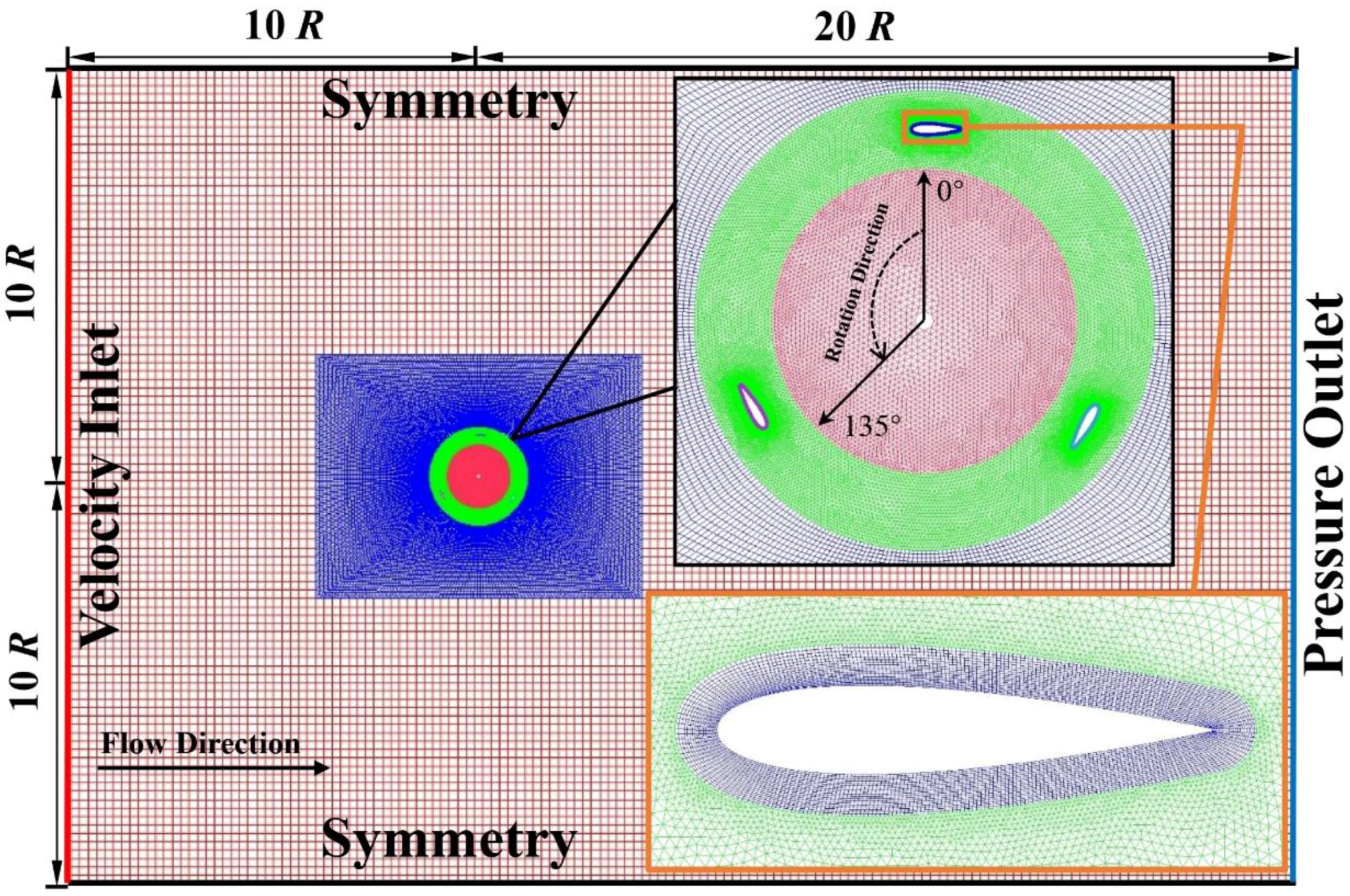
3.1. Numerical Set-up
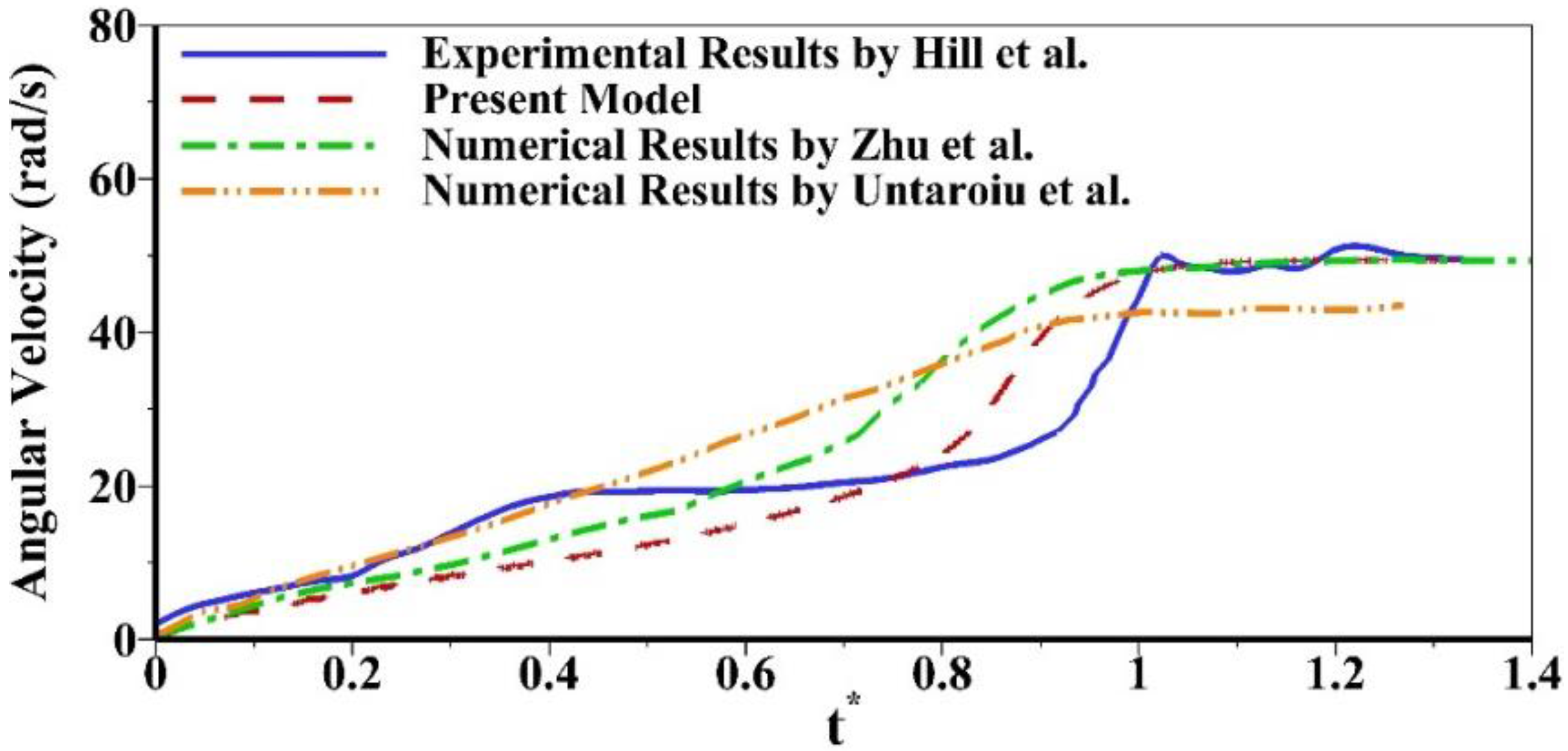
3.2. Experimental Validation
4. Results and Discussion
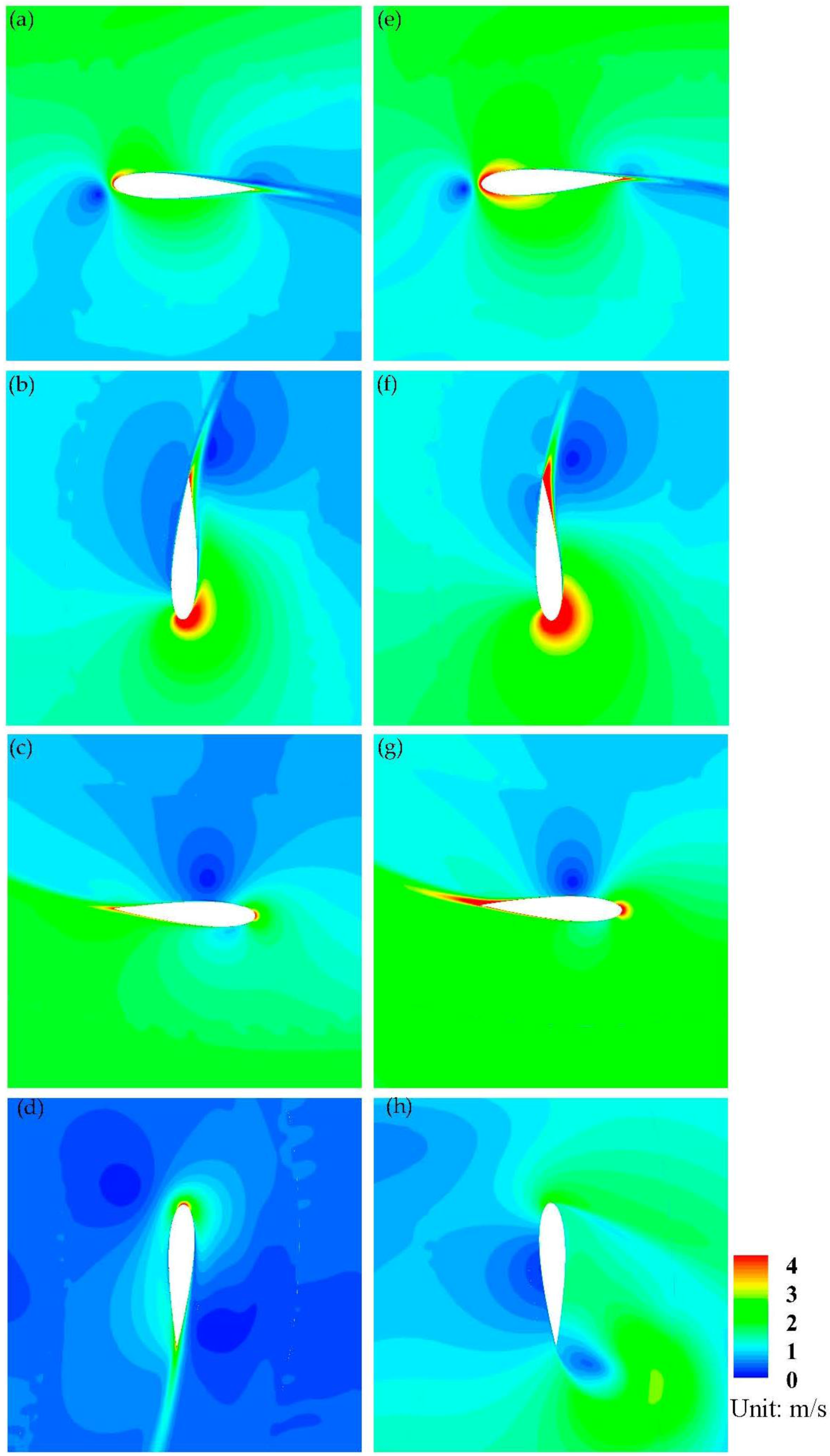
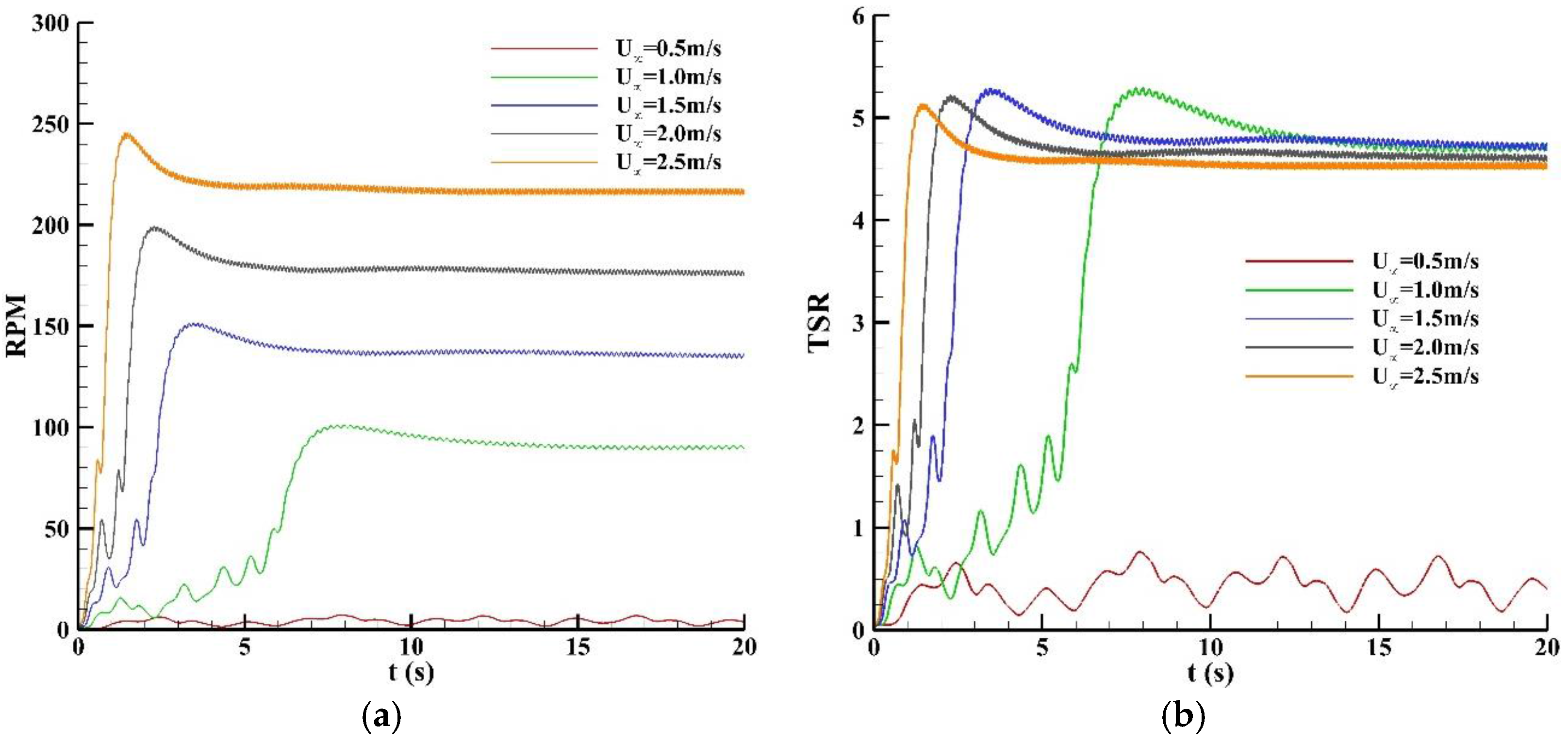
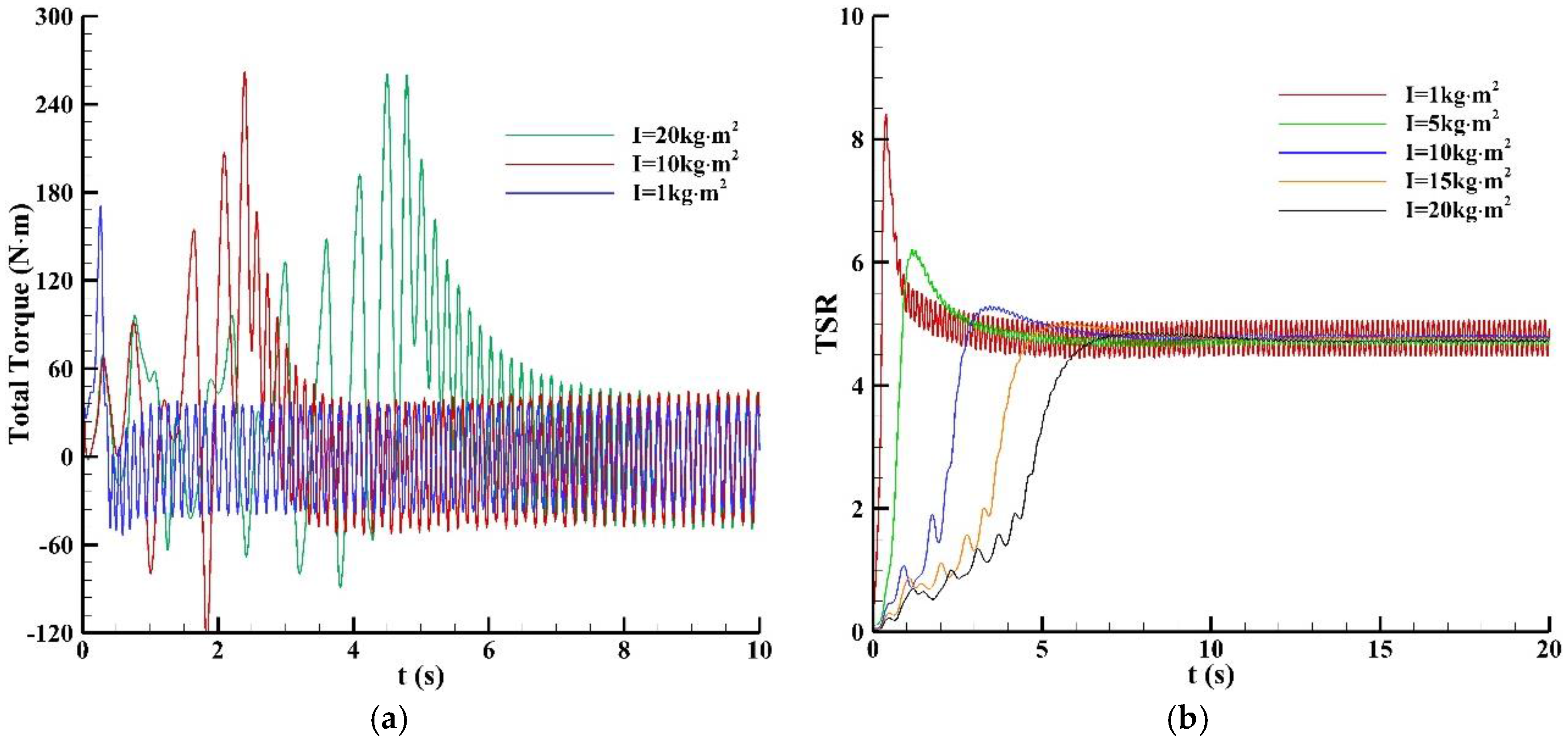
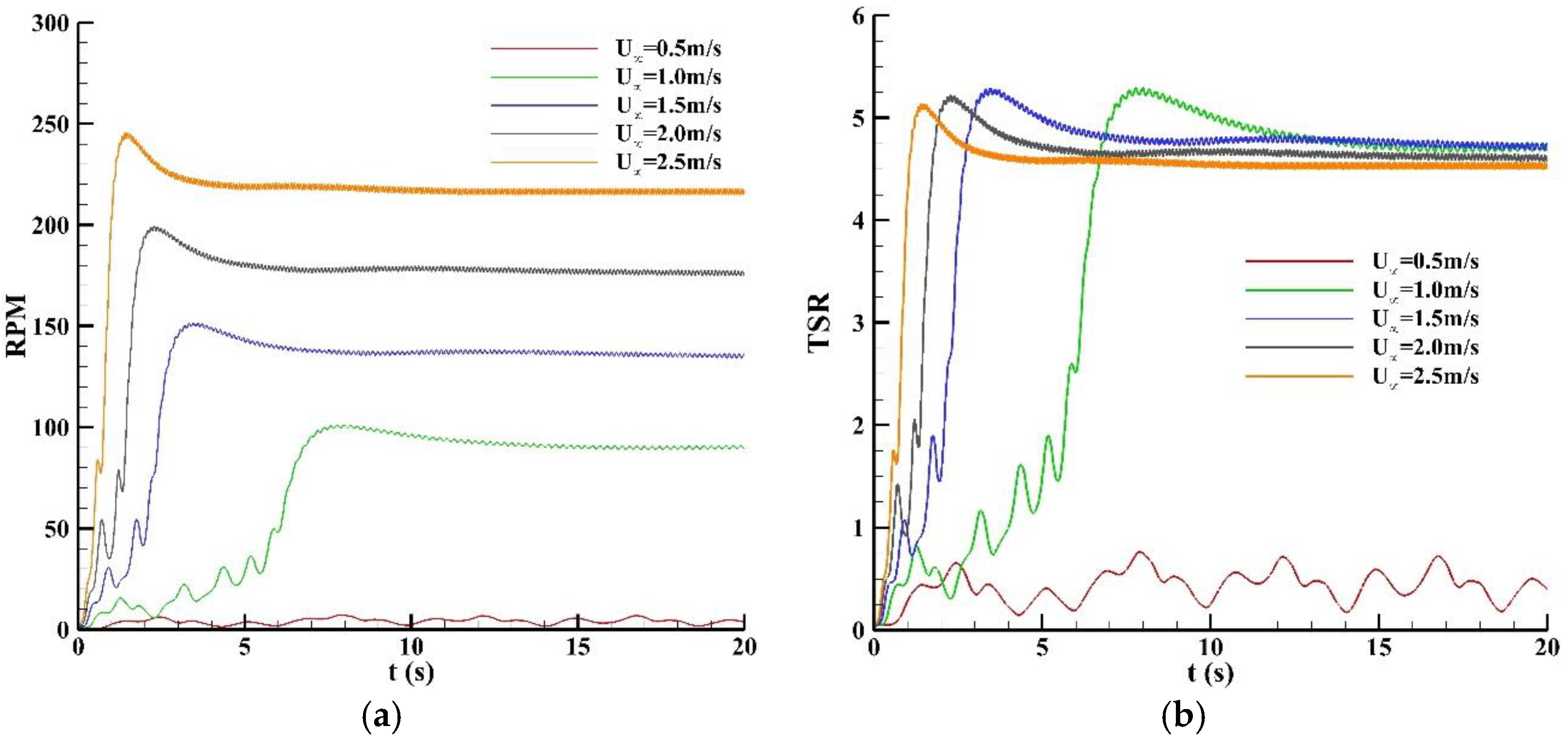
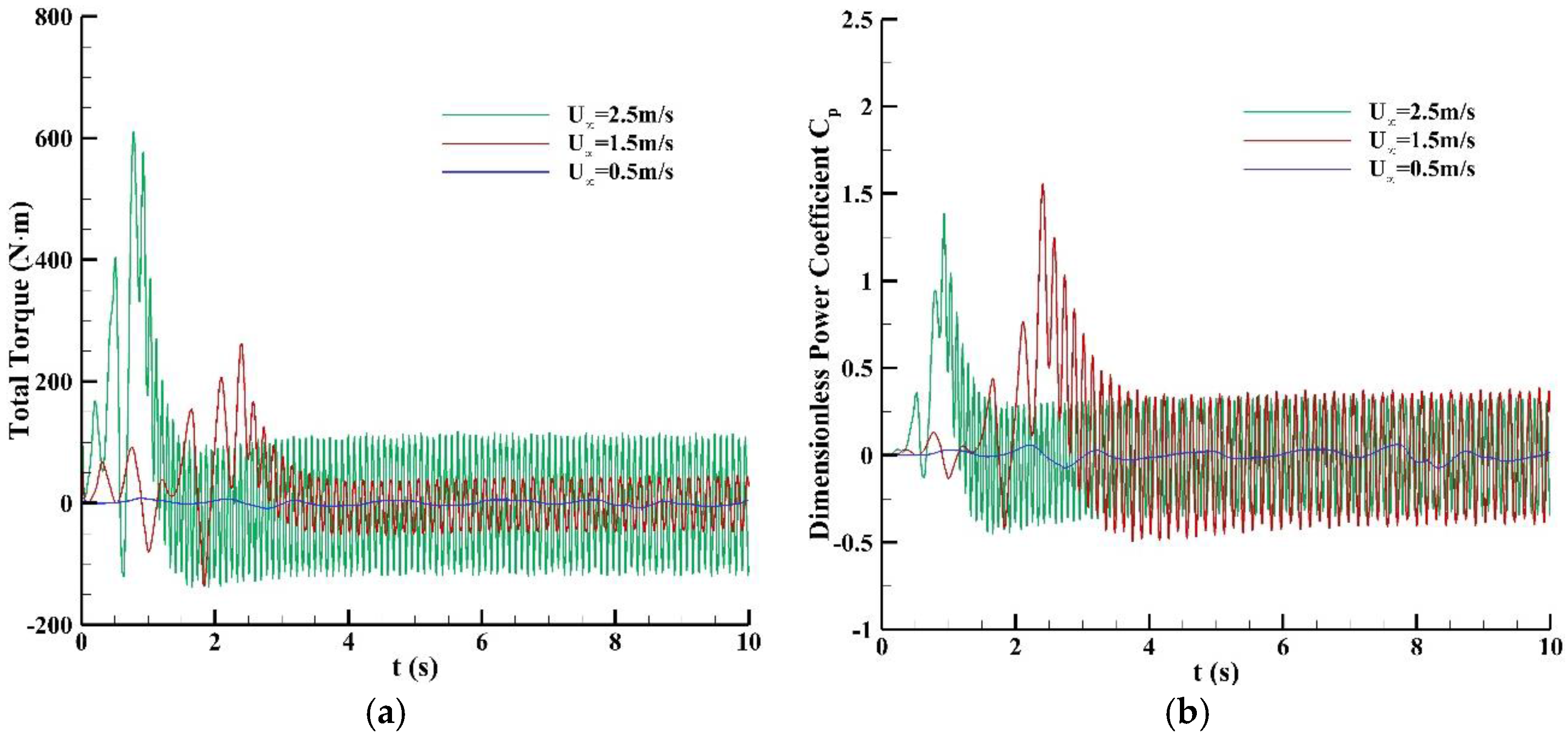
4.1. Calculations without the System Loads
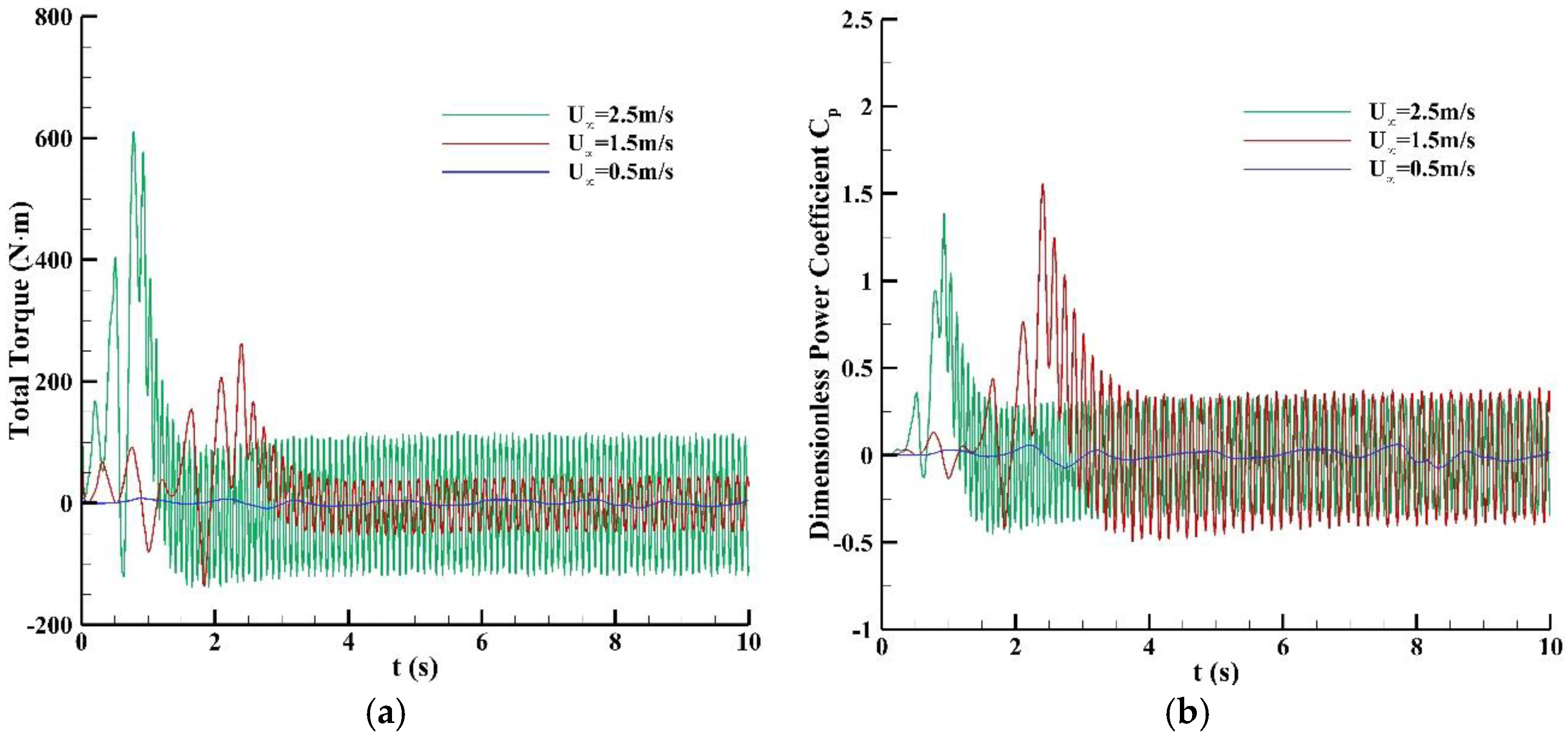
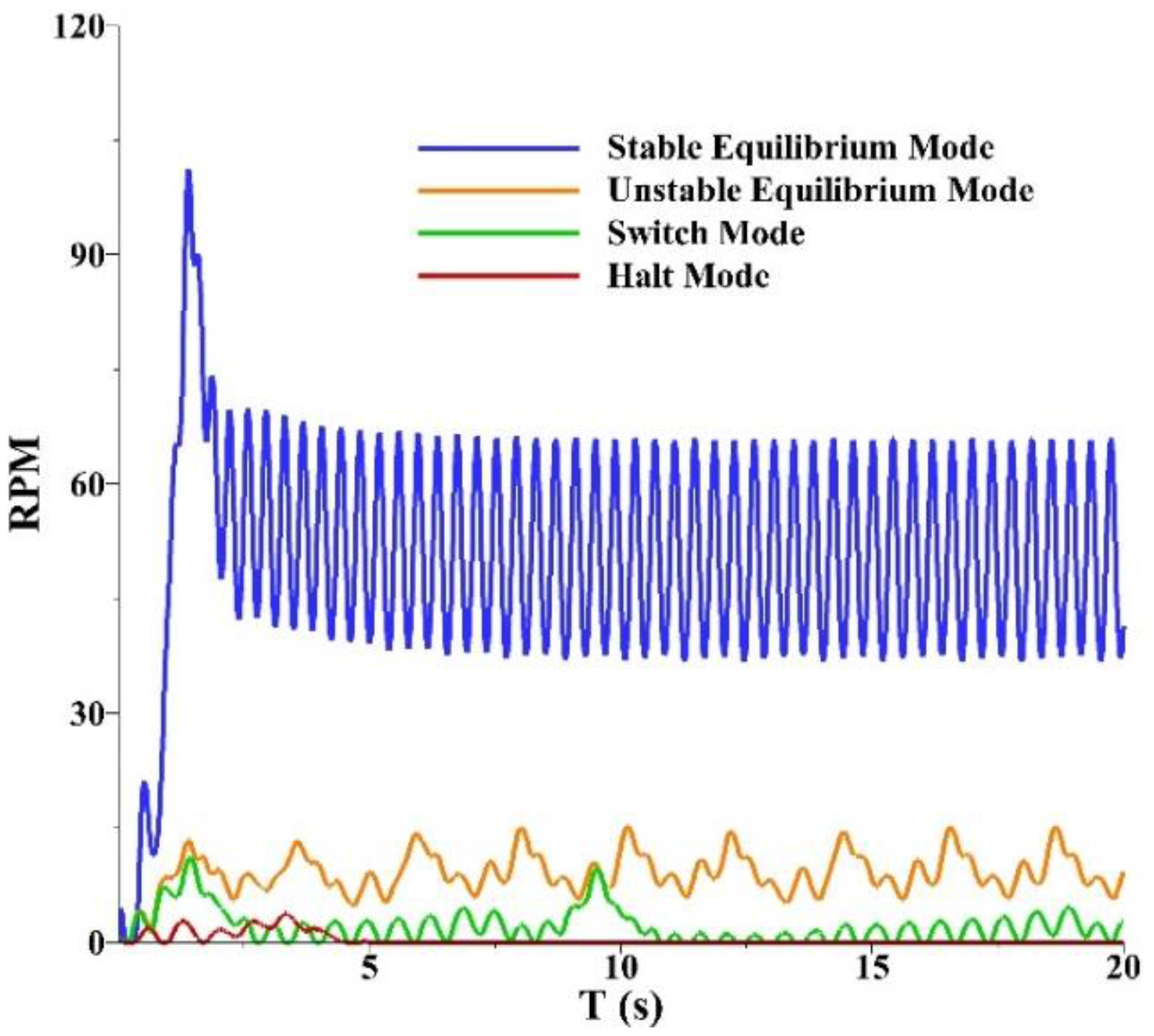
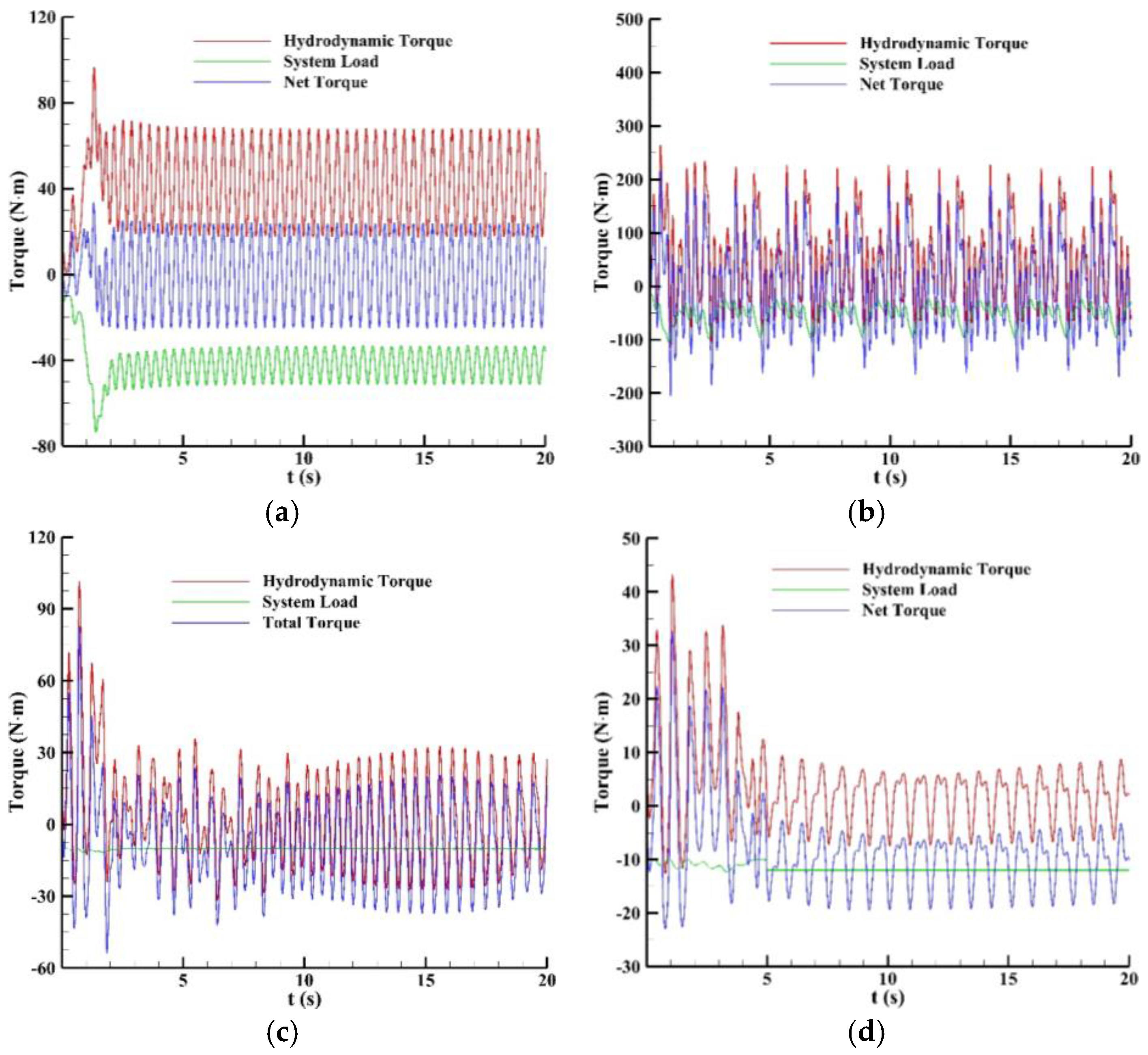
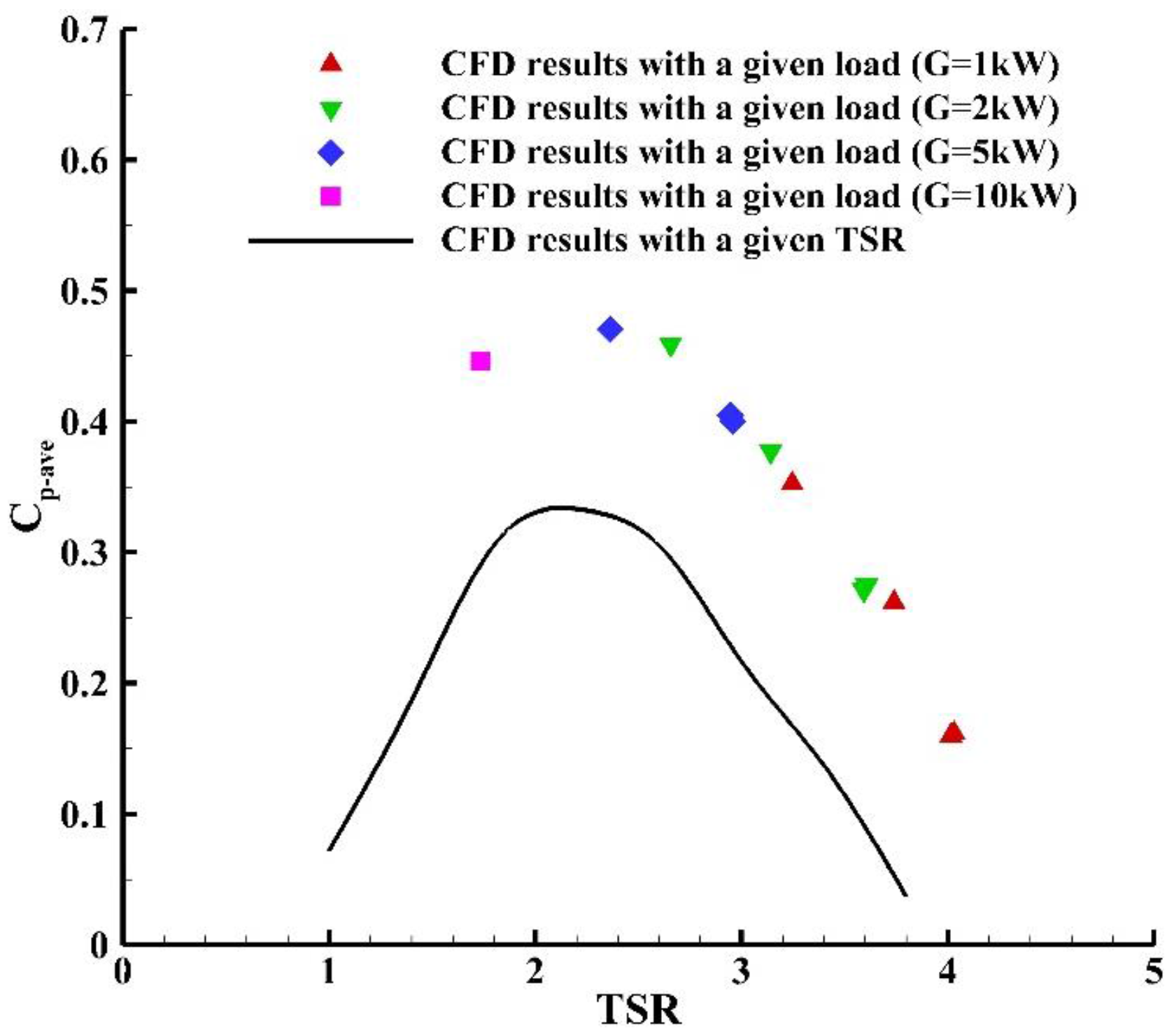
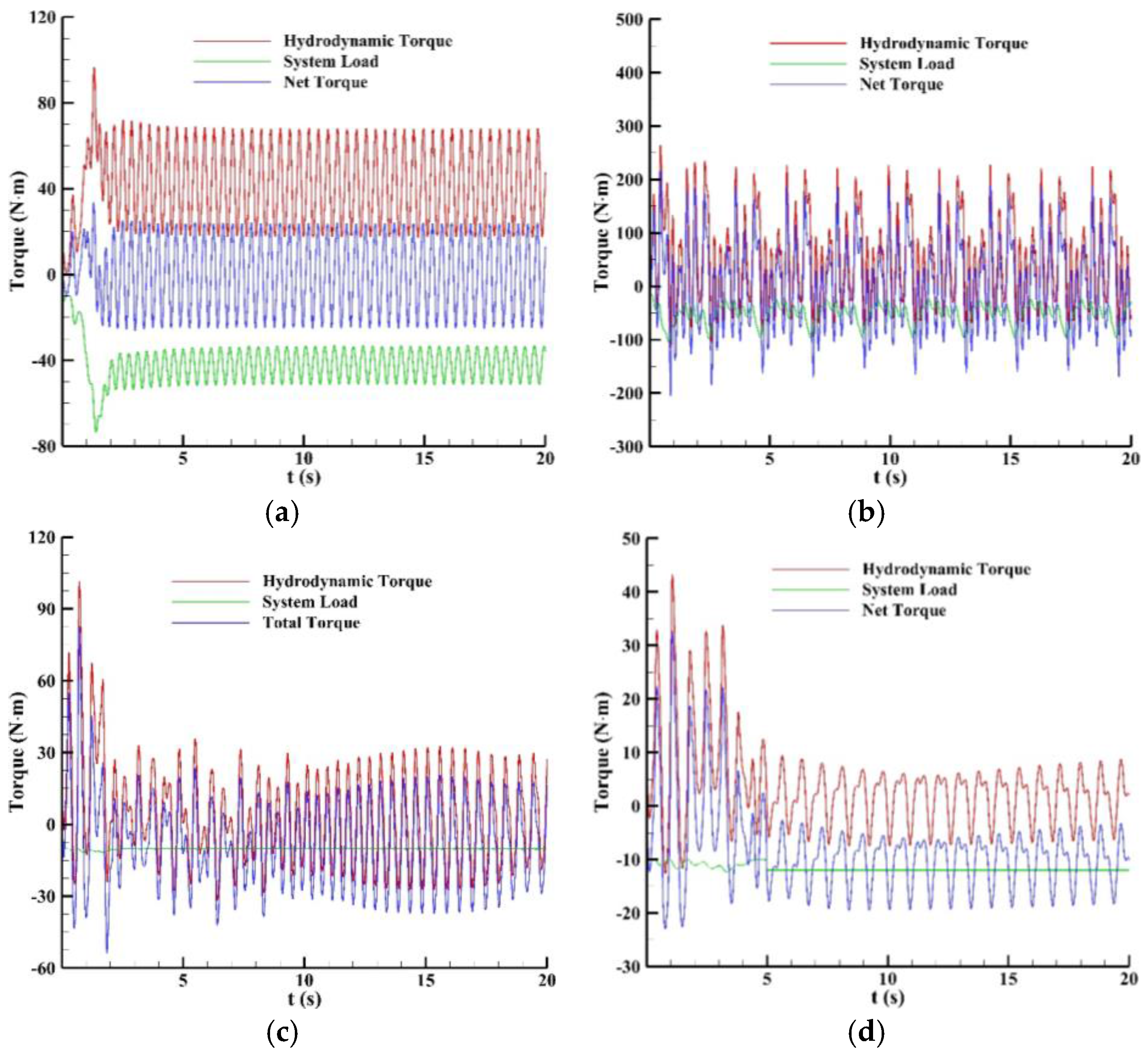
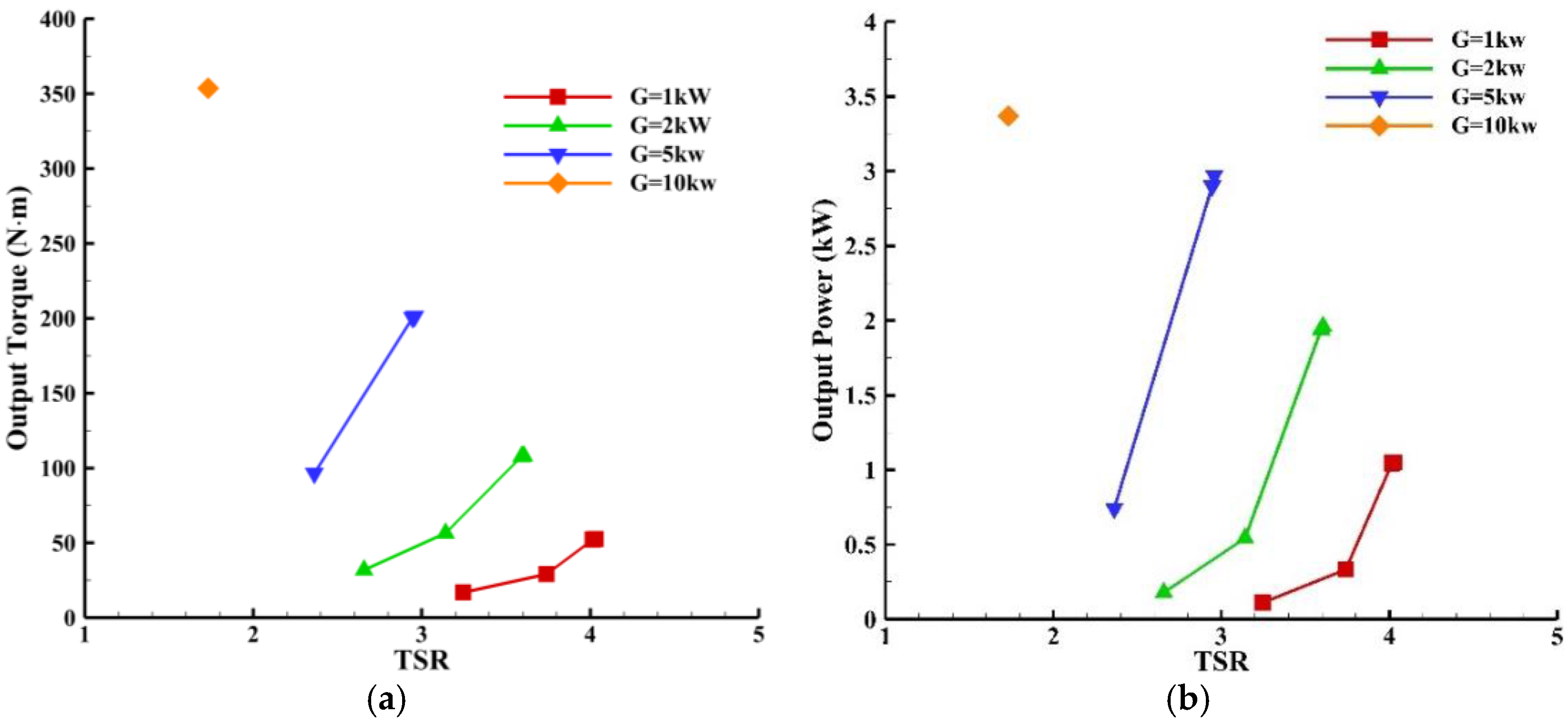
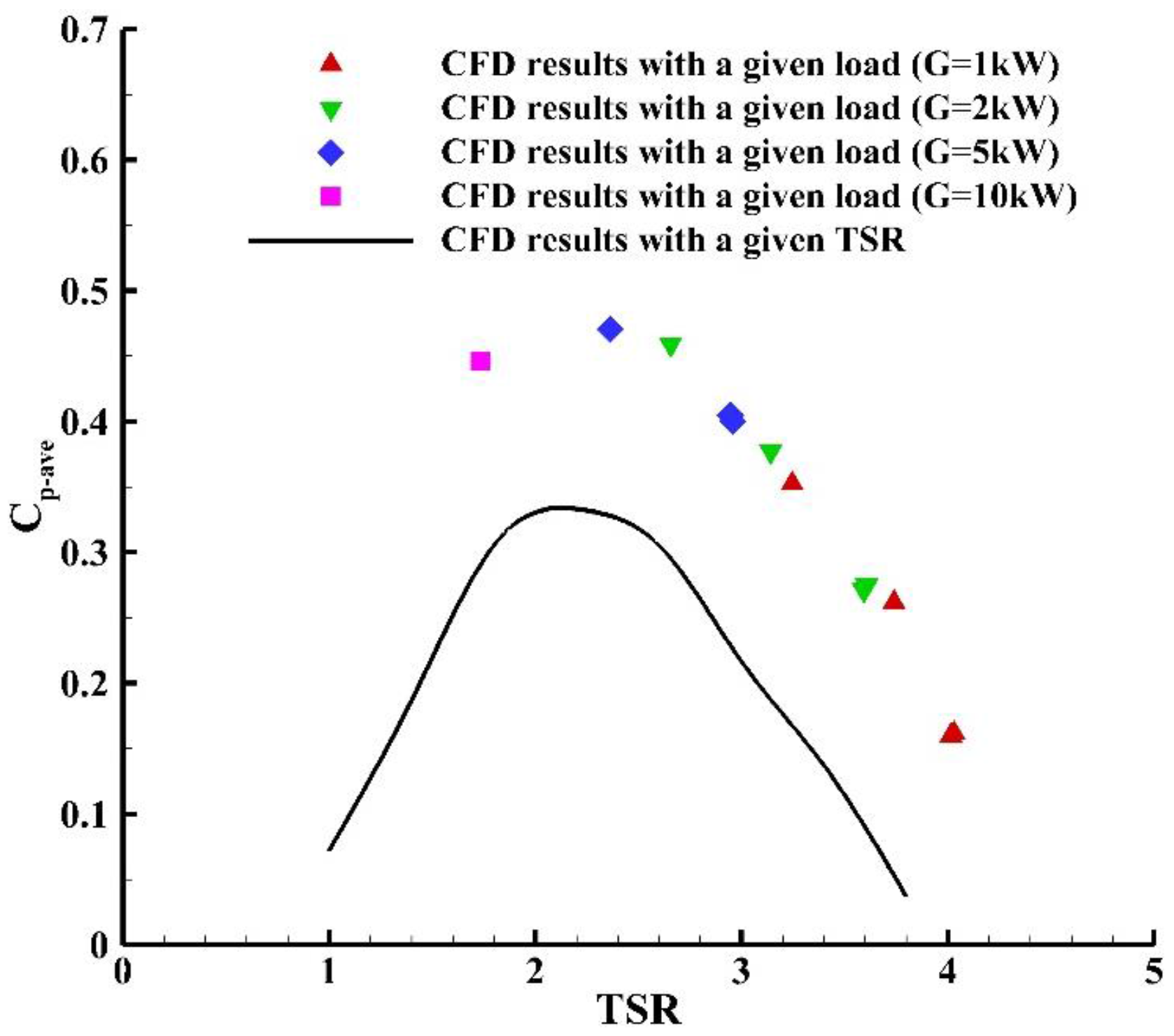
4.2. Calculations with the System Loads
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jesch, L.F.; Walton, D. Reynolds number effects on the aerodynamic performance of a vertical axis wind turbine. In Proceedings of the 3rd International Symposium on Wind Energy Systems, Lyngby, Denmark, 26–29 August 1980.
- Kentfield, J.A.C. A cycloturbine with automatic, self-regulating, blade pitch control. In Proceedings of the 4th ASME Wind Turbine System, Dallas, TX, USA, 17–21 February 1985.
- Kentfield, J.A.C. Theoretically and experimentally obtained performances of gurney-flap equipped wind turbines. Wind Eng. 1996, 18, 63–71. [Google Scholar]
- Dominy, R.; Lunt, P.; Bickerdyke, A.; Dominy, J. Self-starting capability of a Darrieus turbine. Proc. Inst. Mech. Eng. A J. Power Energy 2007, 221, 111–120. [Google Scholar] [CrossRef] [Green Version]
- Baker, J.R. Features to aid or enable self starting of fixed pitch low solidity vertical axis wind turbines. J. Wind Eng. Ind. Aerodyn. 1983, 15, 369–380. [Google Scholar] [CrossRef]
- Kirke, B.K. Evaluation of Self-Starting Vertical Axis Wind Turbines for Stand-Alone Applications. Ph.D. Thesis, School of Engineering, Griffith University, Nathan, QLD, Australia, 1998. [Google Scholar]
- Hill, N.; Dominy, R.; Ingram, G.; Dominy, J. Darrieus turbines: The physics of self-starting. Proc. Inst. Mech. Eng. A J. Power Energy 2009, 223, 21–29. [Google Scholar] [CrossRef]
- Biadgo, A.M.; Simonovic, A.; Komarov, D.; Stupar, S. Numerical and analytical investigation of vertical axis wind turbine. FEM Trans. 2013, 41, 49–58. [Google Scholar]
- Nguyen, C.C.; Le, T.H.H.; Tran, P.T. A numerical study of thickness effect of the symmetric NACA 4-digit airfoils on self starting capability of a 1 kW H-type vertical axis wind turbine. Int. J. Mech. Eng. Appl. 2015, 3, 7–16. [Google Scholar]
- Beri, H.; Yao, Y.X. Effect of camber airfoil on self starting of vertical axis wind turbine. J. Environ. Sci. Technol. 2011, 4, 302–312. [Google Scholar] [CrossRef]
- Batista, N.C.; Melicio, R.; Matias, J.C.O.; Catalao, J.P.S. Self-start evaluation in lift-type vertical axis wind turbines: Methodology and computational tool applied to asymmetrical airfoils. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Torremolinos, Spain, 11–13 May 2011.
- Seralathan, S.; Micha, P.T.; Thangavel, S.; Pradeep, G.P. Numerical studies on the effect of cambered airfoil blades on self starting of vertical axis wind turbine Part 2: NACA 0018 and NACA 63415. Appl. Mech. Mater. 2015, 787, 245–249. [Google Scholar] [CrossRef]
- Singh, M.A.; Biswas, A.; Misra, R.D. Investigation of self-starting and high rotor solidity on the performance of a three S1210 blade H-type Darrieus rotor. Renew. Energy 2015, 76, 381–387. [Google Scholar] [CrossRef]
- Dumitrache, A.; Frunzulica, F.; Dumitrescu, H.; Suatean, B. Influences of some parameters on the performance of a small vertical axis wind turbine. Renew. Energy Environ. Sustain. 2016, 1, 1–5. [Google Scholar] [CrossRef]
- Sengupta, A.R.; Biswas, A.; Gupta, R. Studies of some high solidity symmetrical and unsymmetrical blade H-Darrieus rotors with respect to starting characteristics, dynamic performances and flow physics in low wind streams. Renew. Energy 2016, 93, 536–547. [Google Scholar] [CrossRef]
- Batista, N.C.; Melicio, R.; Mendes, V.M. F.; Calderon, M.; Ramiro, A. On a self-start Darrieus wind turbine: Blade design and field tests. Renew. Sustain. Energy Rev. 2015, 52, 508–522. [Google Scholar] [CrossRef]
- Zhang, L.X.; Pei, Y.; Liang, Y.B.; Zhang, F.Y.; Wang, Y.; Meng, J.J.; Wang, H.R. Design and implementation of straight-bladed vertical axis wind turbine with collective pitch control. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015.
- Liang, Y.B.; Zhang, L.X.; Li, E.X.; Zhang, F.Y. Blade pitch control of straight-bladed vertical axis wind turbine. J. Cent. South Univ. 2016, 23, 1106–1114. [Google Scholar] [CrossRef]
- P’Yankov, K.S.; Toporkov, M.N. Mathematical modeling of flows in wind turbines with a vertical axis. Fluid Dyn. 2014, 49, 249–258. [Google Scholar] [CrossRef]
- Naoi, K.; Tsuji, K.; Shiono, M.; Suzuki, K. Study of characteristics of Darrieus-type straight-bladed vertical axis wind turbine by use of ailerons. J. Ocean Wind Energy 2015, 2, 107–112. [Google Scholar] [CrossRef]
- Bos, R. Self-Starting of a Small Urban Darrieus Rotor—Strategies to Boost Performance in Low-Reynolds-Number Flows. Master’s Thesis, Faculty of Aerospace Engineering, Delft University of Technology, Delft, The Netherlands, 2012. [Google Scholar]
- Untaroiu, A.; Wood, H.G.; Allaire, P.E.; Ribando, R.J. Investigation of self-starting capability of vertical axis wind turbines using a computational fluid dynamics approach. J. Sol. Energy Eng. 2011, 133, 041010. [Google Scholar] [CrossRef]
- Rossetti, A.; Pavesi, G. Comparison of different numerical approaches to the study of the H-Darrieus turbines start-up. Renew. Energy 2013, 50, 7–19. [Google Scholar] [CrossRef]
- Zhu, J.Y.; Huang, H.L.; Shen, H. Self-starting aerodynamics analysis of vertical axis wind turbine. Adv. Mech. Eng. 2015, 7, 1–12. [Google Scholar] [CrossRef]
- Dumitrescu, H.; Cardos, V.; Malael, I. The physics of starting process for vertical axis wind turbines. In CFD for Wind and Tidal Offshore Turbines, 1st ed.; Eerrer, E., Montlaur, A., Eds.; Springer: Cham, Switzerland, 2015; pp. 69–81. [Google Scholar]
- Le, T.Q.; Lee, K.S.; Park, J.S.; Ko, J.H. Flow-driven rotor simulation of vertical axis tidal turbines: A comparison of helical and straight blades. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 257–268. [Google Scholar] [CrossRef]
- Zhang, X.W.; Zhang, L.; Wang, F.; Zhao, D.Y.; Pang, C.Y. Research on the unsteady hydrodynamic characteristics of vertical axis tidal turbine. China Ocean Eng. 2014, 28, 95–103. [Google Scholar] [CrossRef]
- Lunt, P.A. An Aerodynamic Model for a Vertical-Axis Wind Turbine. Master’s Thesis, School of Engineering, University of Durham, Durham, UK, 2005. [Google Scholar]
- Worasinchai, S.; Ingram, G.L.; Dominy, R.G. The physics of H-Darrieus turbine starting behavior. J. Eng. Gas Turbines Power 2016, 138, 062605. [Google Scholar] [CrossRef]
- Marsh, P.; Ranmuthugala, D.; Penesis, I.; Thomas, G. Three-dimensional numerical simulations of straight-bladed vertical axis tidal turbines investigating power output, torque ripple and mounting forces. Renew. Energy 2015, 83, 67–77. [Google Scholar] [CrossRef]
- Liu, Z.; Qu, H.L.; Shi, H.D.; Hu, G.X.; Hyun, B.S. Application of 2D numerical model to unsteady performance evaluation of vertical-axis tidal current turbine. J. Ocean Univ. China 2016, 15, 1–10. [Google Scholar] [CrossRef]
- PMSG Product List. Available online: http://www.tianlongpmg.com/enindex.php (accessed on 8 July 2016).
- Alcorn, R.; O’Sullivan, D. Electrical Design for Ocean Wave and Tidal Energy Systems. In IET Renewable Energy Series 7; The Institute of Engineering and Technology: London, UK, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Number of blades N | 3 |
| Blade chord C (m) | 0.12 |
| Blade span S (m) | 1.0 |
| Radius of rotor R (m) | 0.5 |
| Solidity σ | 0.36 |
| Fixed pitch angle β | 0° |
| Installed Capacity G (kW) | Rated Rotation Speed (RPM) | Initial Torque (N·m) | Constant Ratio k (N·m·s/rad) |
|---|---|---|---|
| 1 | 200 | 1.5 | 2.6 |
| 2 | 200 | 2.0 | 6.0 |
| 5 | 250 | 4.5 | 13.6 |
| 10 | 150 | 13.0 | 40.8 |
| Free Velocity (m/s) | Moment of Inertia (kg·m2) | Installed Capacity (kW) | Mode of Self-Starting |
|---|---|---|---|
| 1 | 1 | 1 | SEM |
| 2 | SEM | ||
| 5 | HM | ||
| 10 | HM | ||
| 1.5 | 1 | 1 | SEM |
| 2 | SEM | ||
| 5 | SEM | ||
| 10 | SM | ||
| 2.5 | 1 | 1 | SEM |
| 2 | SEM | ||
| 5 | SEM | ||
| 10 | SEM | ||
| 1 | 10 | 1 | HM |
| 2 | HM | ||
| 5 | HM | ||
| 10 | HM | ||
| 1.5 | 10 | 1 | SM |
| 2 | SM | ||
| 5 | SM | ||
| 10 | SM | ||
| 2.5 | 10 | 1 | SEM |
| 2 | SEM | ||
| 5 | SEM | ||
| 10 | SM | ||
| 1 | 20 | 1 | HM |
| 2 | HM | ||
| 5 | HM | ||
| 10 | HM | ||
| 1.5 | 20 | 1 | UEM |
| 2 | UEM | ||
| 5 | SM | ||
| 10 | SM | ||
| 2.5 | 20 | 1 | SEM |
| 2 | SEM | ||
| 5 | UEM | ||
| 10 | UEM |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Qu, H.; Shi, H. Numerical Study on Self-Starting Performance of Darrieus Vertical Axis Turbine for Tidal Stream Energy Conversion. Energies 2016, 9, 789. https://doi.org/10.3390/en9100789
Liu Z, Qu H, Shi H. Numerical Study on Self-Starting Performance of Darrieus Vertical Axis Turbine for Tidal Stream Energy Conversion. Energies. 2016; 9(10):789. https://doi.org/10.3390/en9100789
Chicago/Turabian StyleLiu, Zhen, Hengliang Qu, and Hongda Shi. 2016. "Numerical Study on Self-Starting Performance of Darrieus Vertical Axis Turbine for Tidal Stream Energy Conversion" Energies 9, no. 10: 789. https://doi.org/10.3390/en9100789