
Optimal Real-Time Scheduling for Hybrid Energy Storage Systems and Wind Farms Based on Model Predictive Control

Abstract
:1. Introduction
- (1)
- We have adopted a fast response speed energy storage and a slow response speed energy storage to smooth the short term and the long term wind power fluctuations, respectively. Due to the two different response speeds, how to get the two energy storages to cooperate is a problem for real time scheduling. We have exploited the modularity of wind farms based on the MPC method with two types of storage to solve the problem.
- (2)
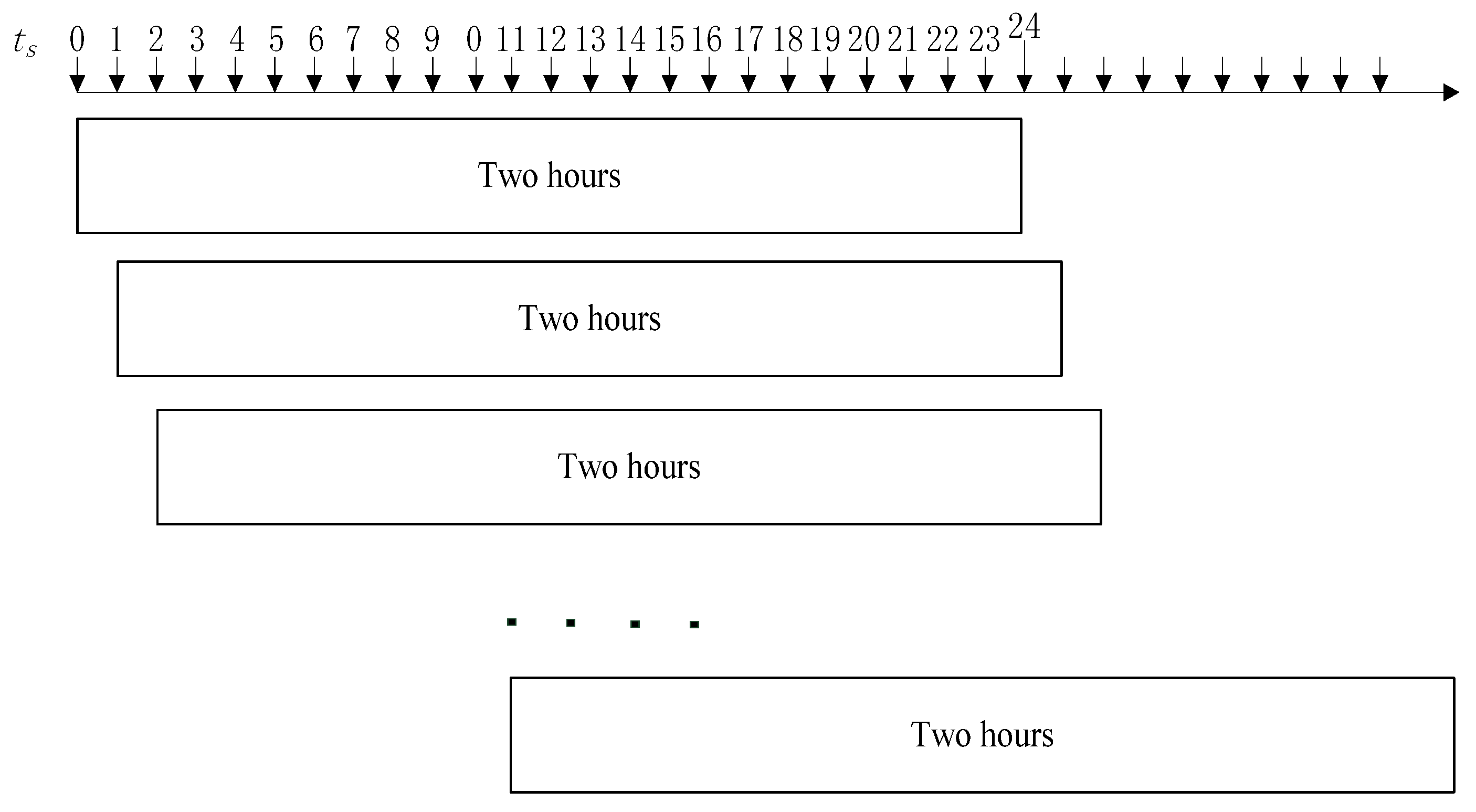
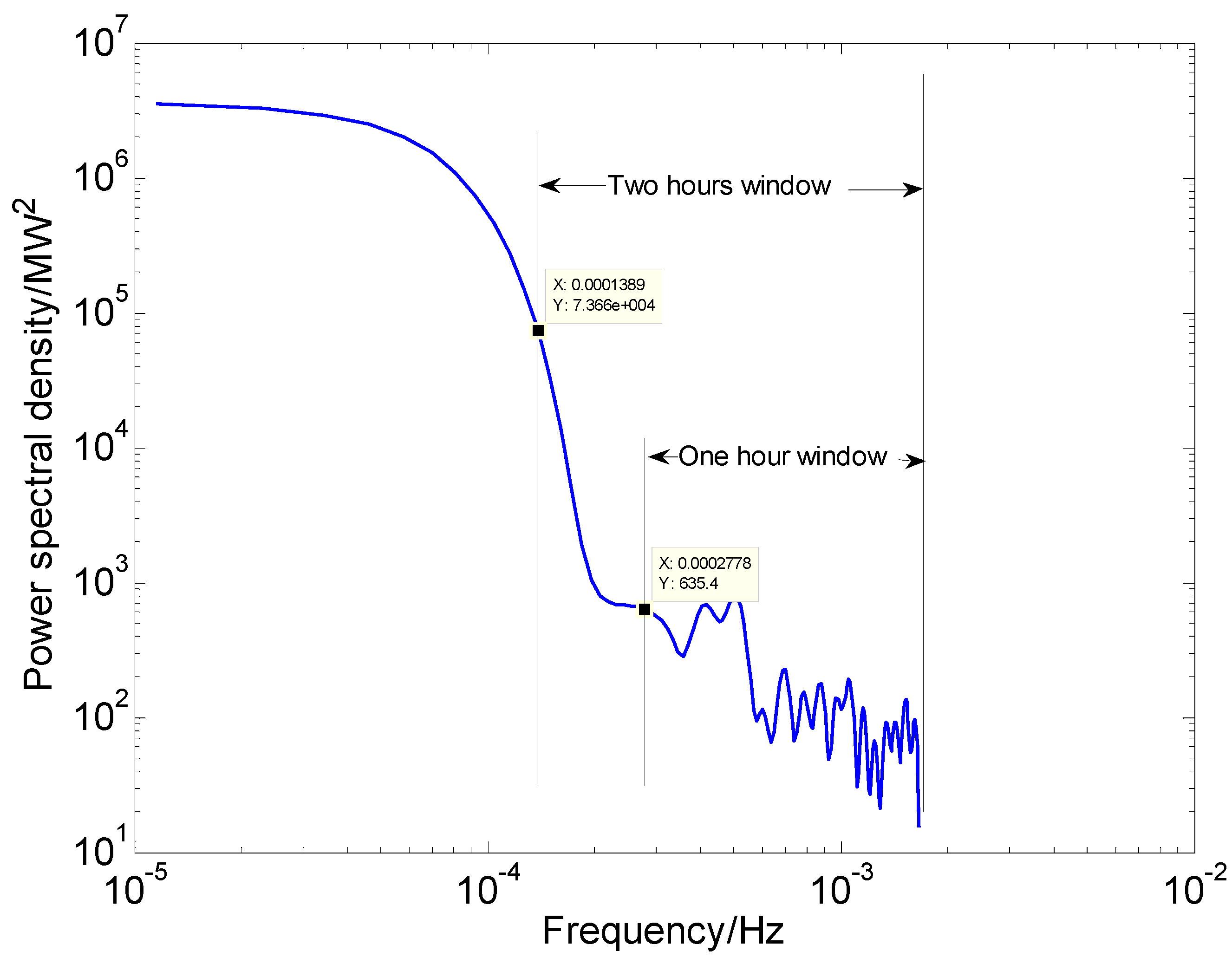
- We present that the MPC prediction horizon should be two hours according to the wind farm power spectrum density and prediction error.
- (3)
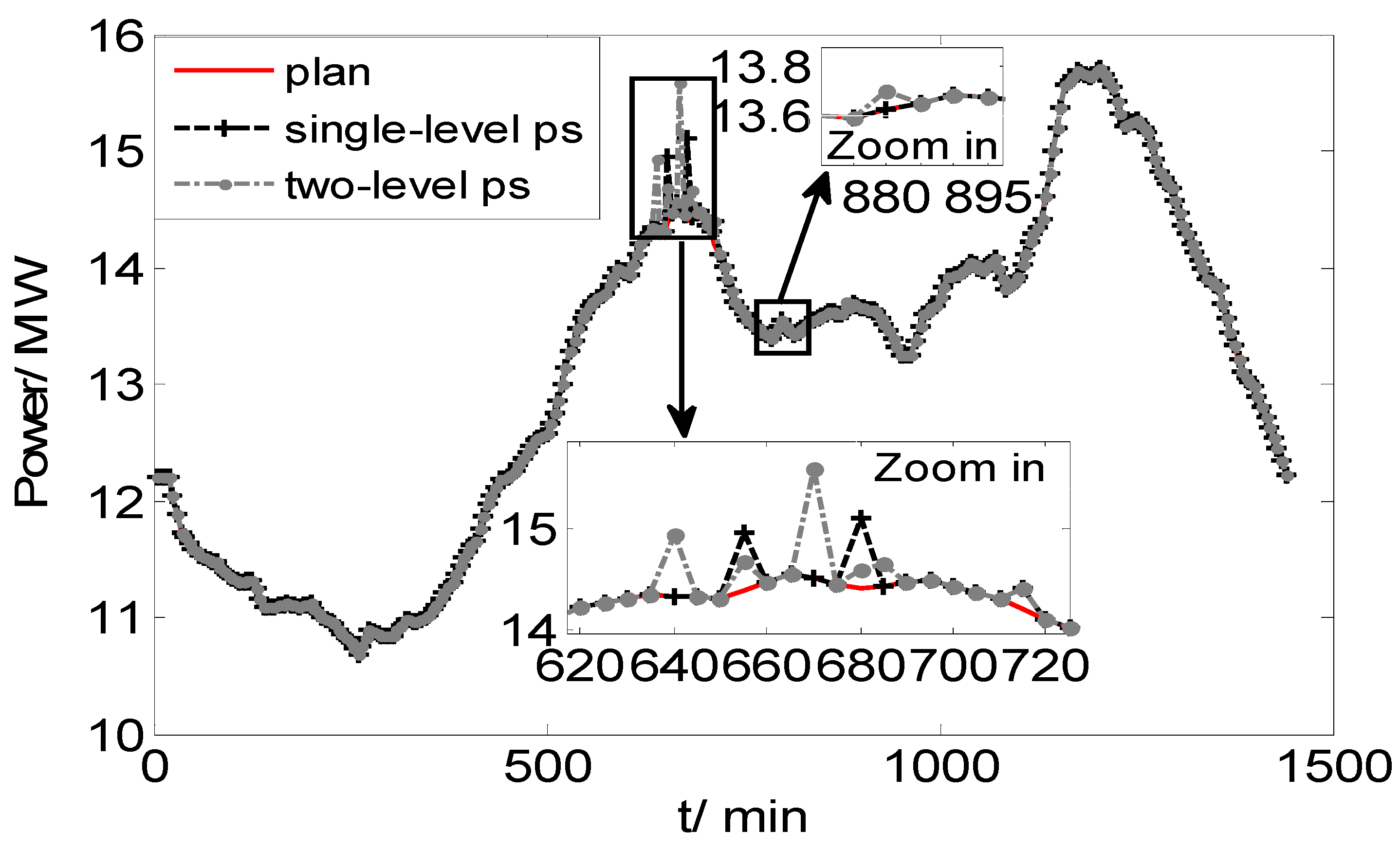
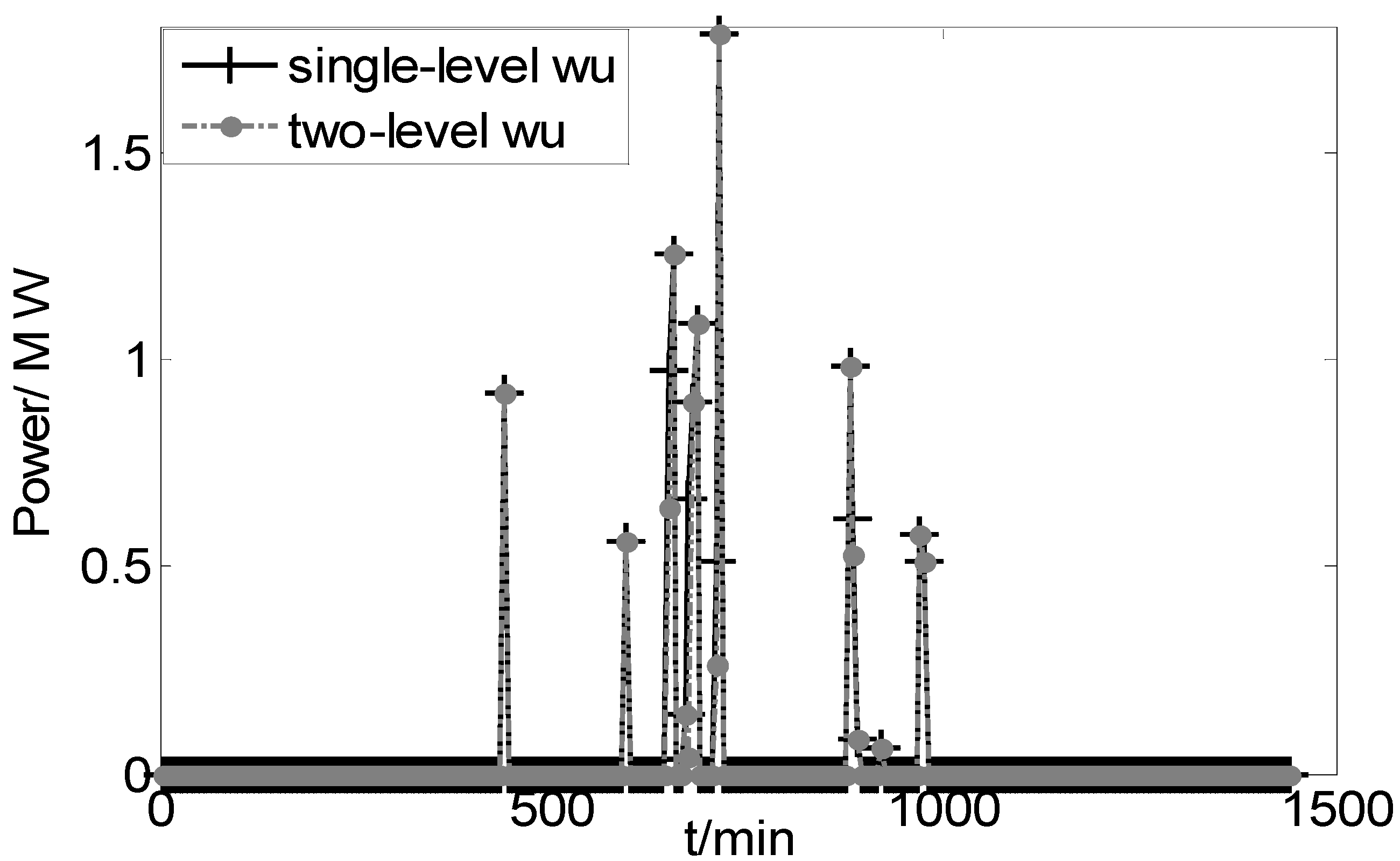
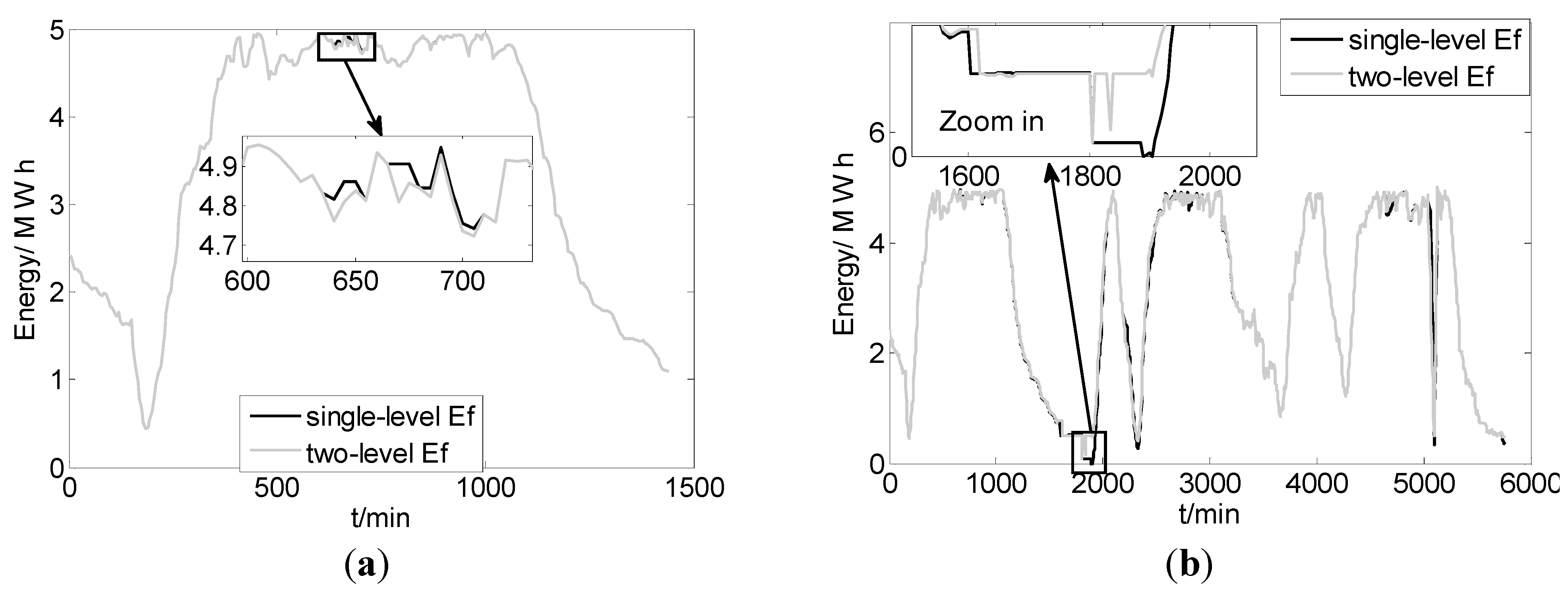
- Additionally, we have implemented a two-level MPC to reduce the optimal computation time. The experimental results are close to that of a single-level MPC. The single-level MPC has its own advantages in following the grid plan. The two-level MPC cannot be substituted for single-level MPC, and vice versa.
- (4)
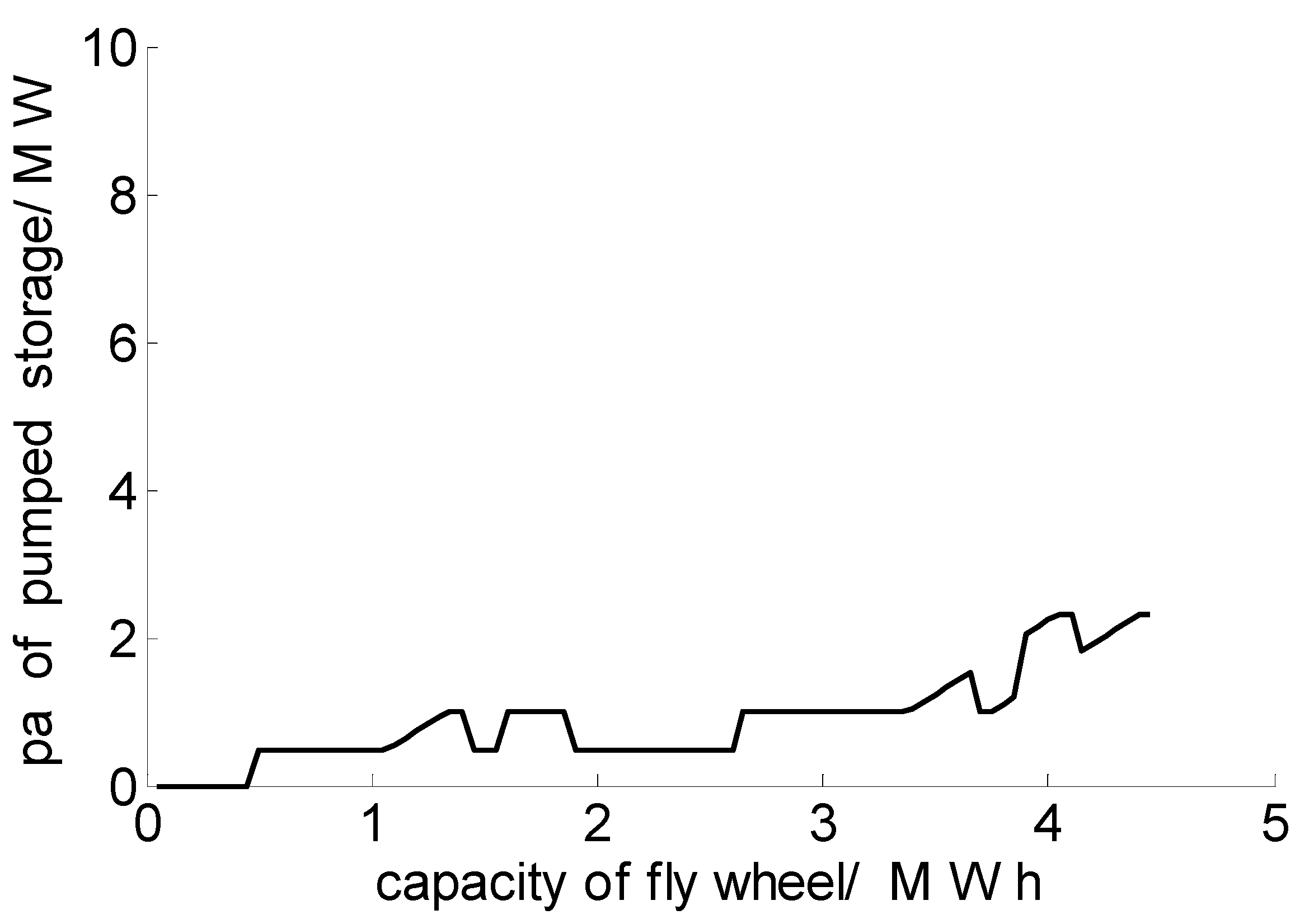
- Two sound conclusions are drawn through theory analyses and simulations: One is that the decision values of the pumped storage are not sensitive to the flywheel capacity. The other is that in some situations, wind power generation being sent to the grid is sacrificed to reduce the wind curtailment.
2. Problem Description
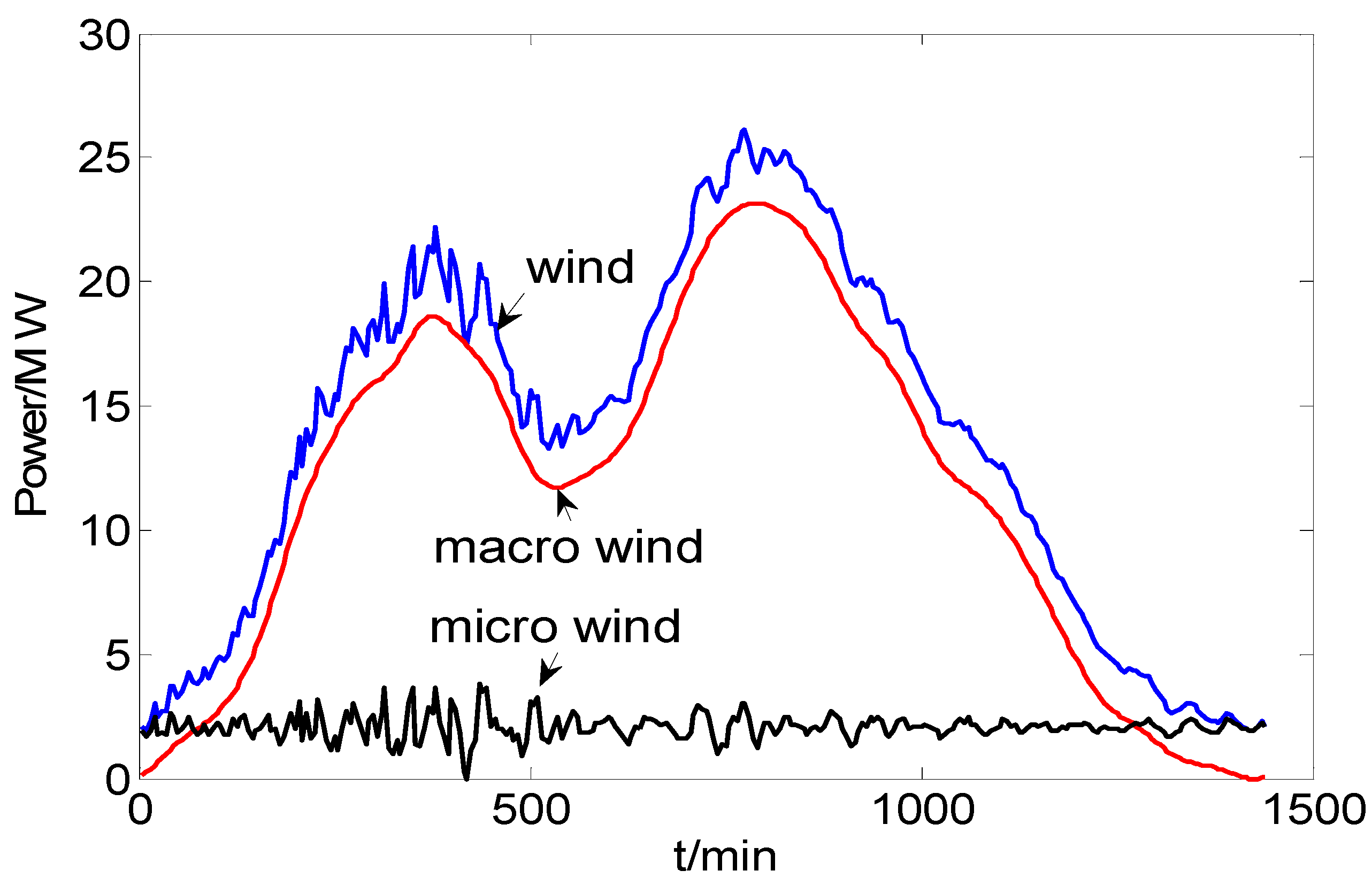
2.1. Characteristics of Wind Power
2.2. Characteristics of Typical Energy Storage Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Power (MW) | Energy (MWh) | Energy Density (Wh/kg) | Power Density (W/kg) | Efficiency (%) | Respond time (s) | Life (year or cycle) |
|---|---|---|---|---|---|---|---|
| Pumped hydro | 0–1800 | >200 | 0.5–1.5 | - | 75 | 10–600 | 50 y |
| Compressed air | 0–300 | 0–105 | 30–60 | 10–100 | 64 | 1–600 | 30 y |
| SMES | 0–10 | 0–1 | 30–100 | 104–105 | 95 | 0.005 | 30 y |
| Fly wheel | 0–5 | 0–10 | 5–10 | 102–103 | 93 | 0.05 | 20 y |
| Super cap | 0–0.3 | 0–10 | <50 | 0–4000 | 98 | 0.05 | 105 c |
| Battery | 0–50 | 0–100 | 30–200 | 0–500 | 70 | 0.02 | 3000 c |
2.3. Relationship between Wind Power Fluctuation and Storage Systems
2.4. The Principle of Choosing Prediction Horizon
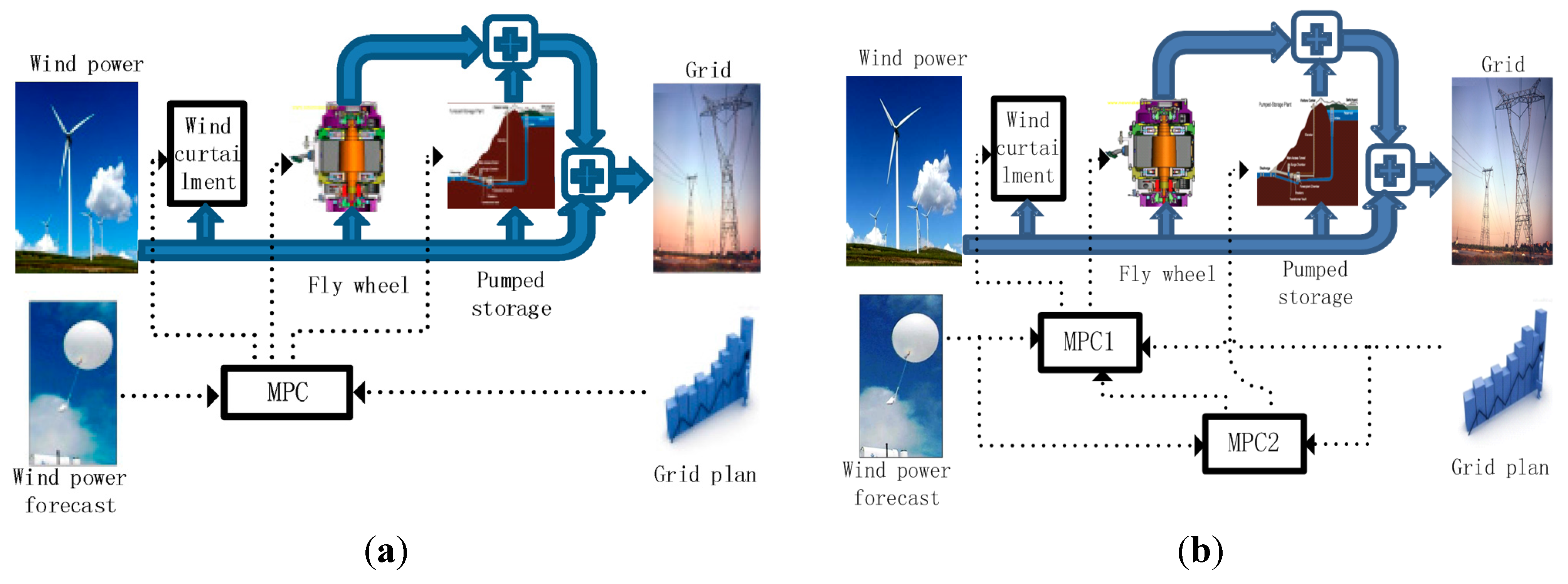
3. The System Configuration and Operating Process
3.1. Single-Level System Configuration and Operating Process
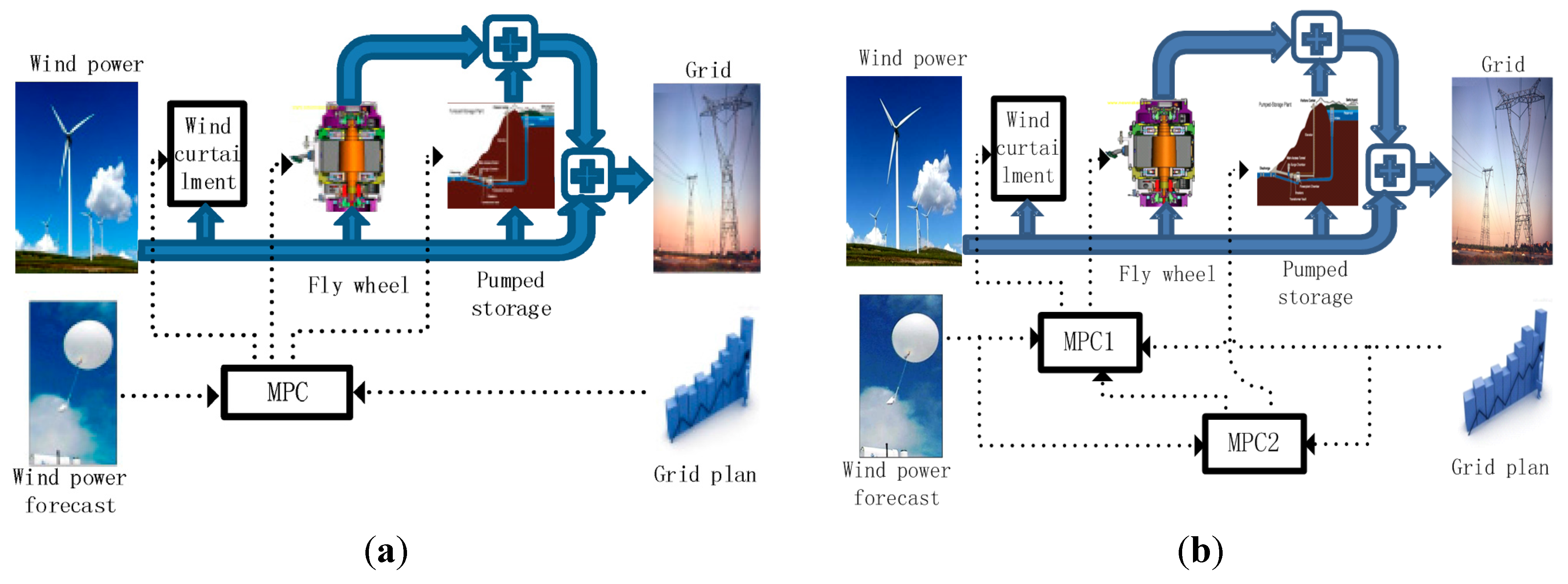
3.2. Two-Level System Configuration and Its Operating Process
4. System Model
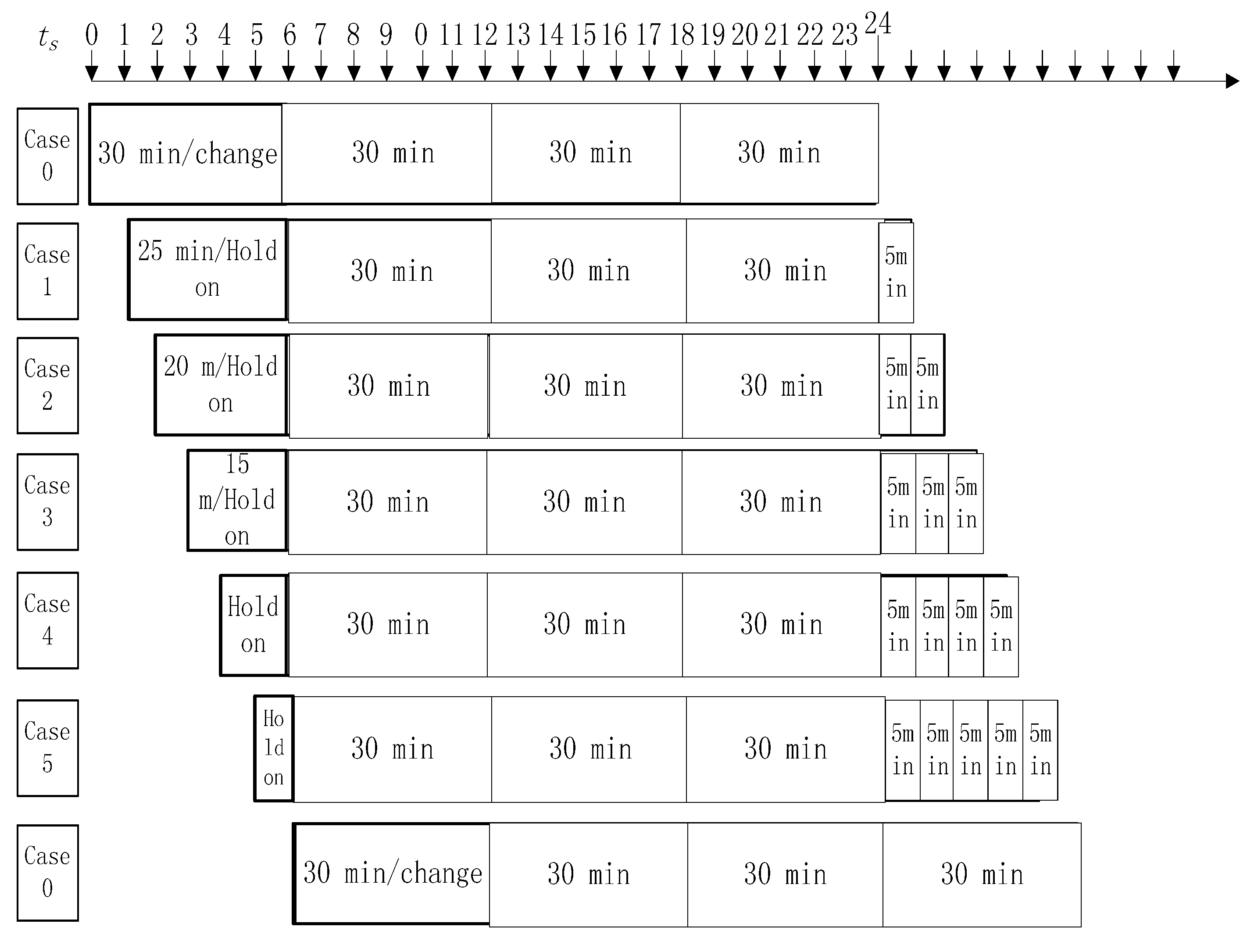
4.1. Single-Level MPC Method

4.2. Single-Level MPC State-Space and Optimization Model
4.2.1. Single-Level MPC State-Space Model
4.2.2. Single-Level MPC Programming Model
- (a)
- Objective Function of the Model
- (b)
- Constraints of the model
- (1)
- The assignment process of wind power is described in Equation (2).
- (2)
- The composition process of the system total generation is described in Equation (3).
- (3)
- The energy balances of the pumped hydro storage and the fly wheel are presented in Equations (4) and (5), respectively.
- (4)
- The upper and lower bounds of pumped storage decision variable are:
- (5)
- The upper and lower bounds of the fly wheel decision variable are described as follows:
- (6)
- The pumped hydro storage occupies only one of three states at any given time: generation, pumping, or shut-down. The constraint is as follows:
- (7)
- The fly wheel storage occupies only one of three states at any given time: charge, discharge, or shut-down. The constraint is as follows:
- (8)
- Wind delivered directly to grid cannot exceed generation plan:
- (9)
- Constraints of Assumption 1:
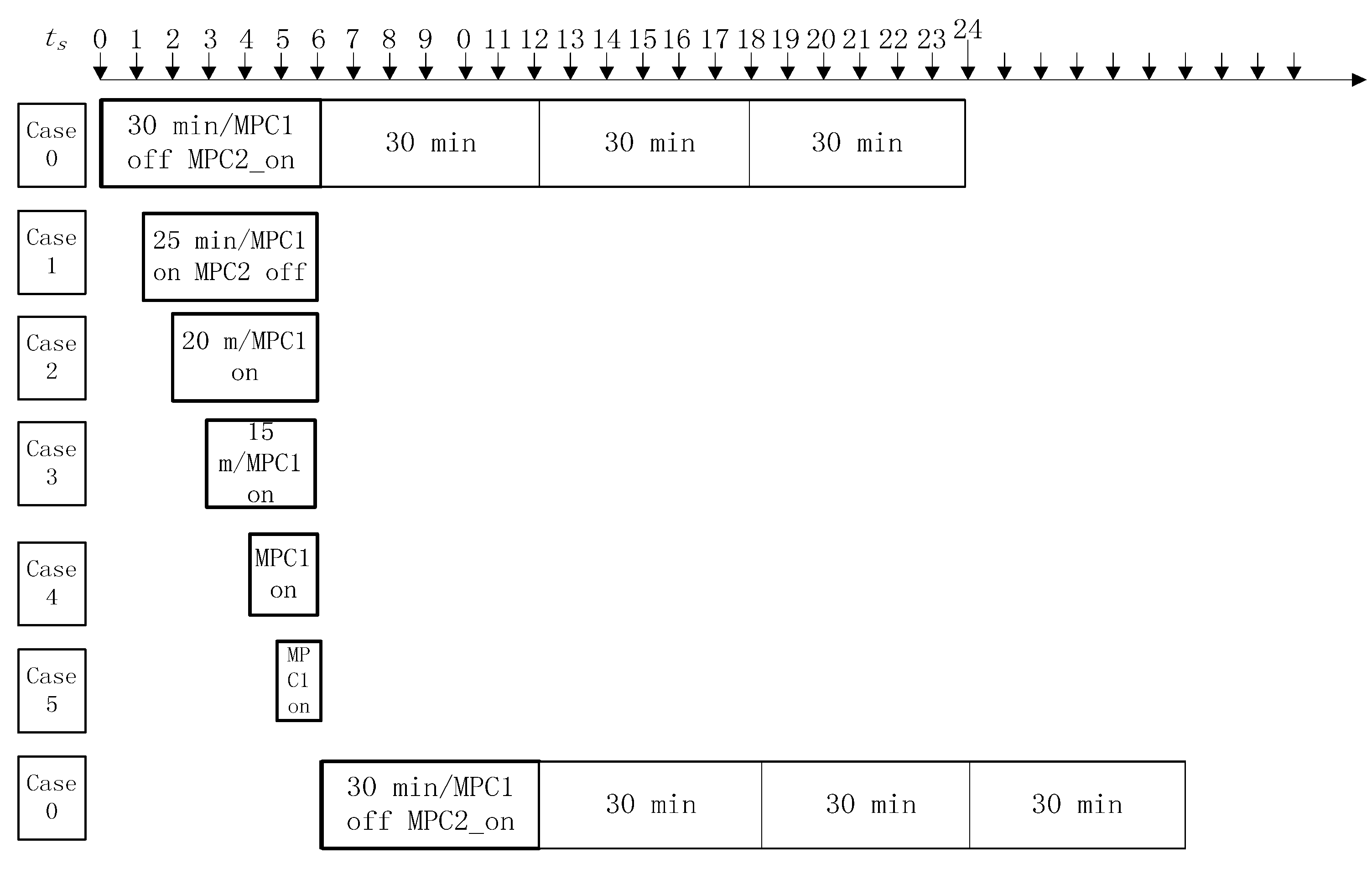
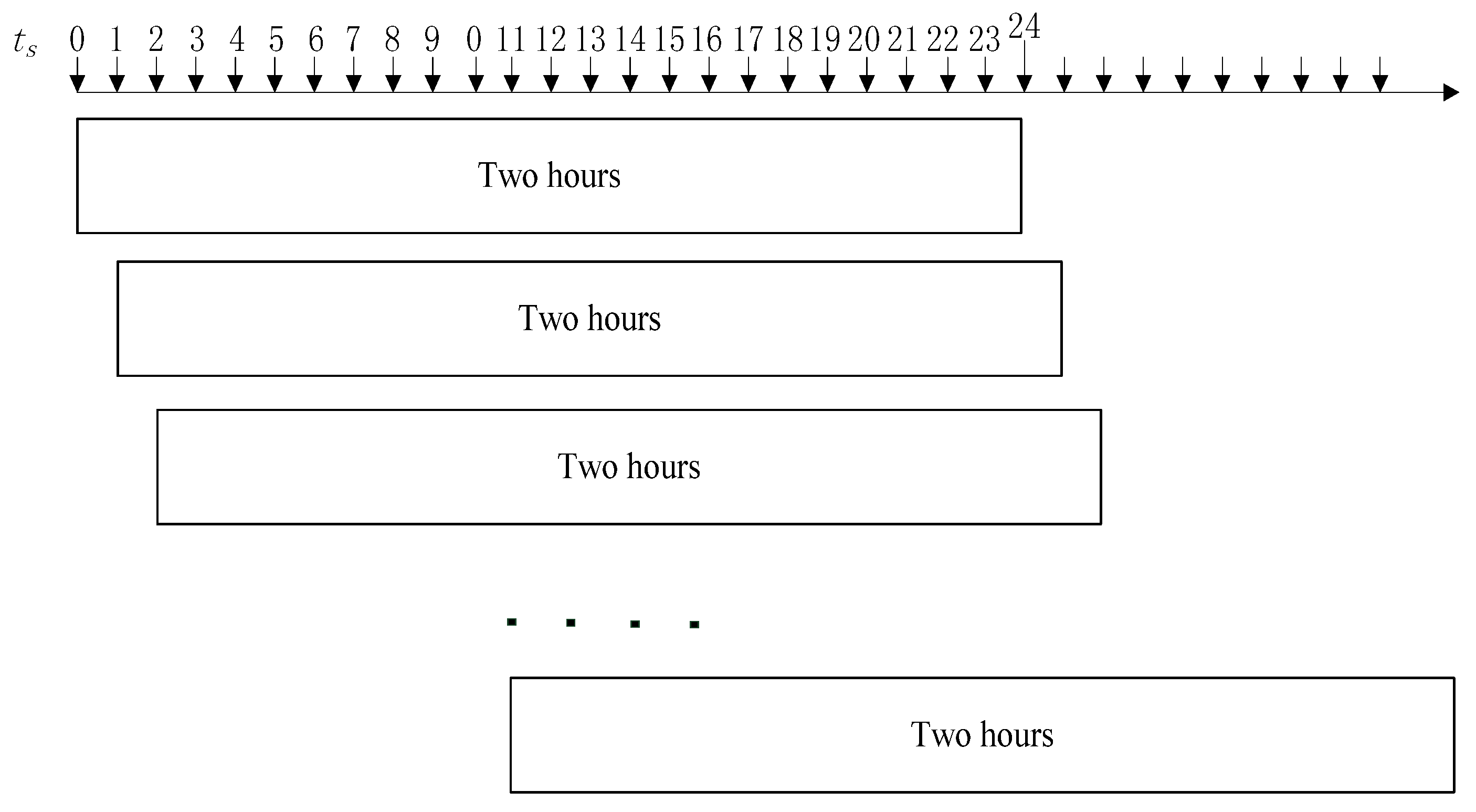
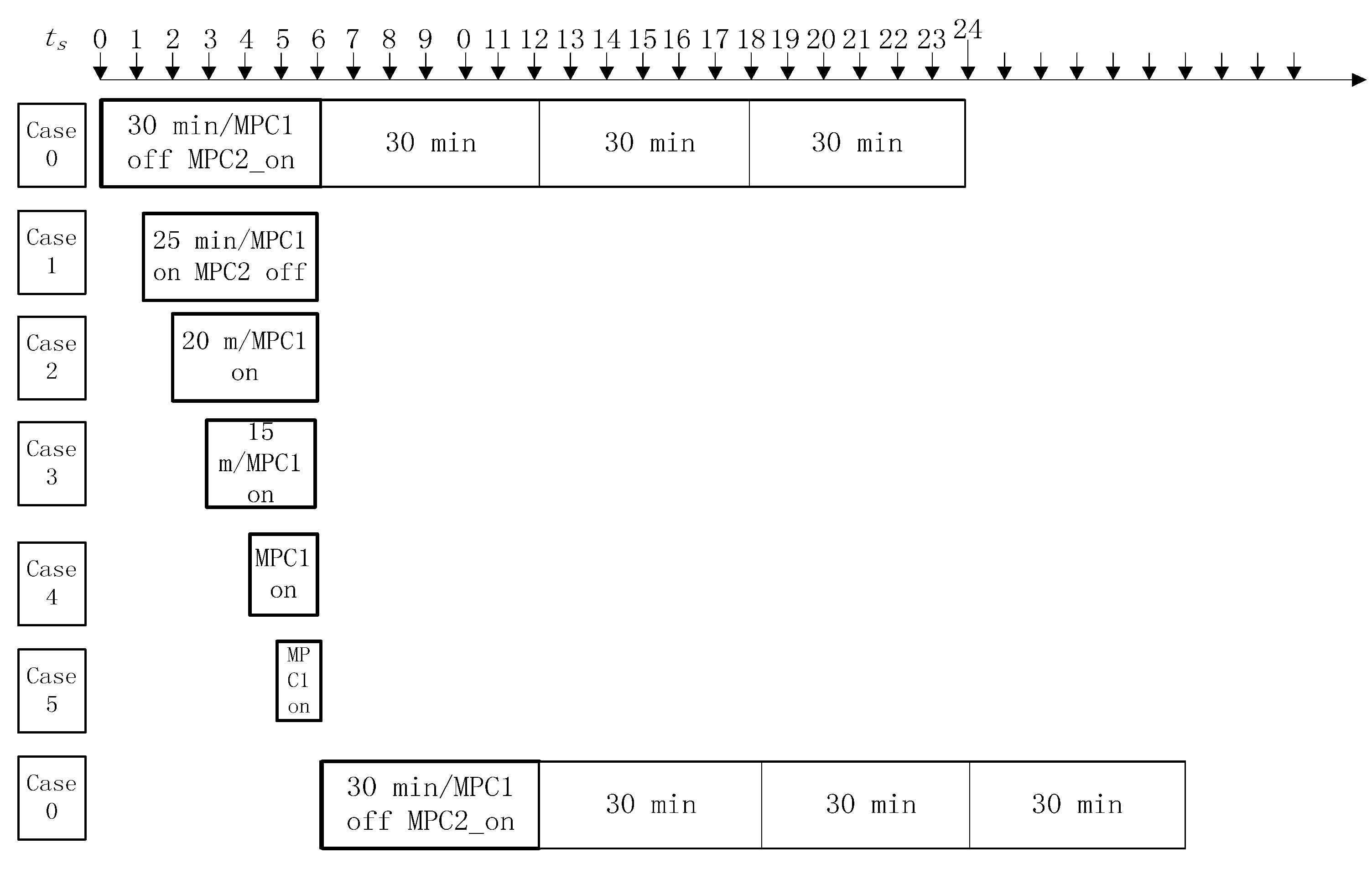
4.3. Two-Level Rolling Optimization

4.4. Two-Level MPC State-Space and Optimization Model
4.4.1. Two-level MPC state-space model
- (a)
- State-space of MPC 2
- (b)
- State-space of MPC 1
4.4.2. Two-Level MPC Programming Model
- (a)
- Programming Model of MPC2
- (b)
- Programming Model of MPC1
- (1)
- MPC1 Objective Function of the Model
- (2)
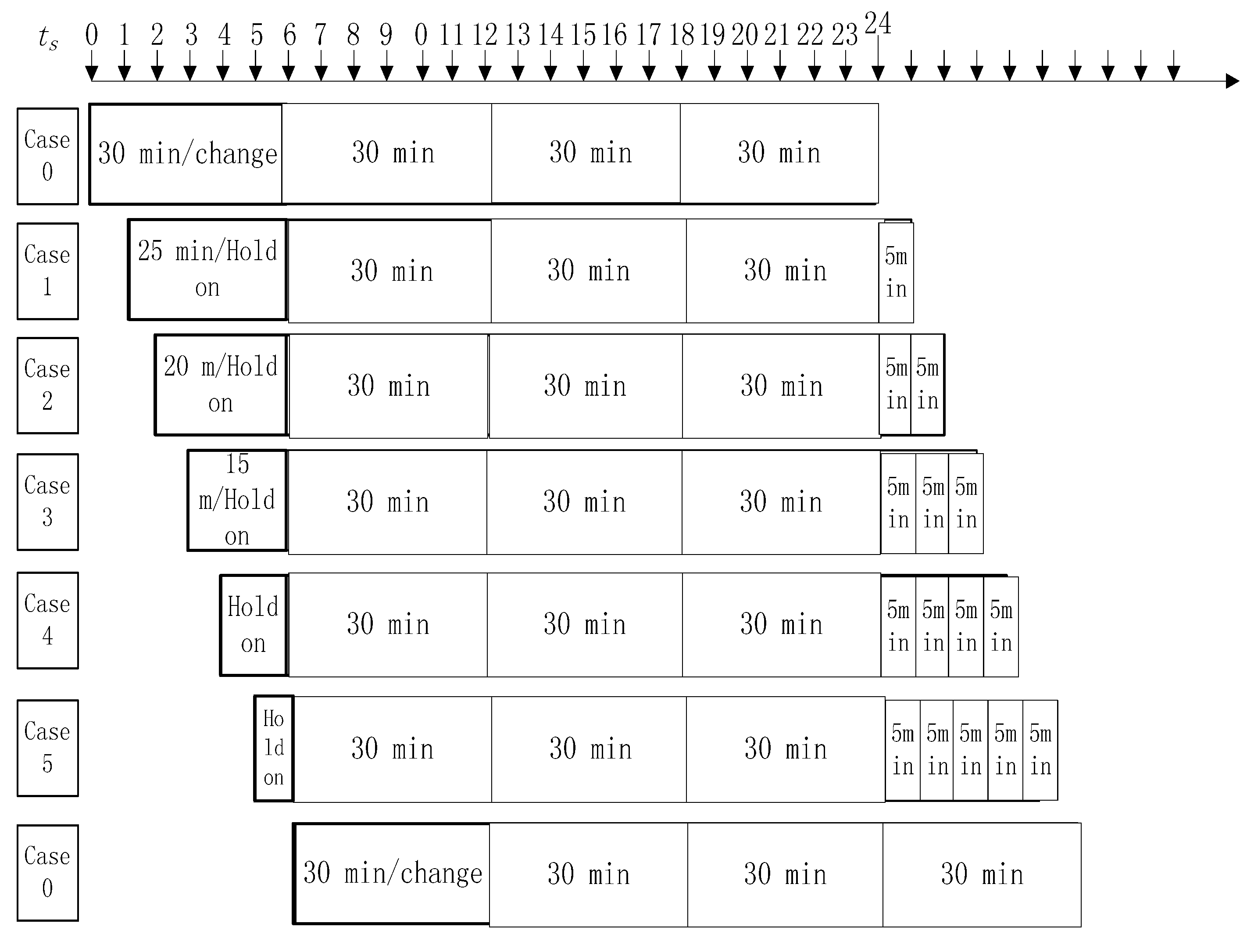
- MPC1 Constraints
| Parameter | Case 0 | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | |
|---|---|---|---|---|---|---|---|
| N | 23 | 4 | 3 | 2 | 1 | 0 | |
| t | 0–23 | 0–4 | 0–3 | 0–2 | 0–1 | 0 | |
| variable | Constant | Constant | Constant | Constant | constant | ||
5. Simulation Results and Discussion
| Type | Charging Power (MW) | Discharging Power (MW) | Initial Energy (MWh) | Minute Energy (MWh) | Maximum Energy (MWh) | Efficiency (η1, η2) | Efficiency (η3, η4) |
|---|---|---|---|---|---|---|---|
| Pumped storage | 100 | 100 | 100 | 20 | 200 | 0.87 | 0.85 |
| Fly wheel | 10 | 10 | 2.5 | 0.0 | 5 | 0.95 | 0.95 |
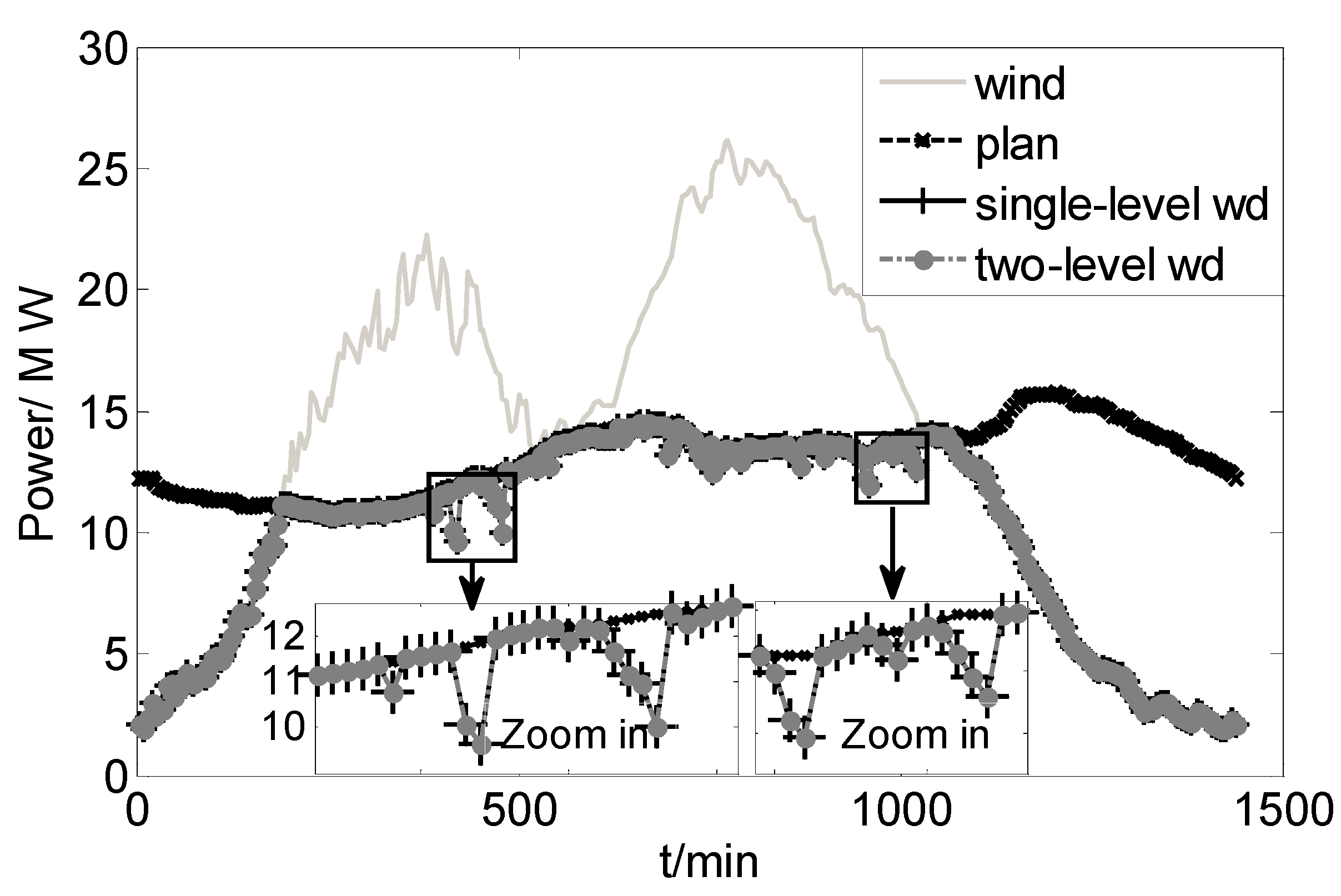
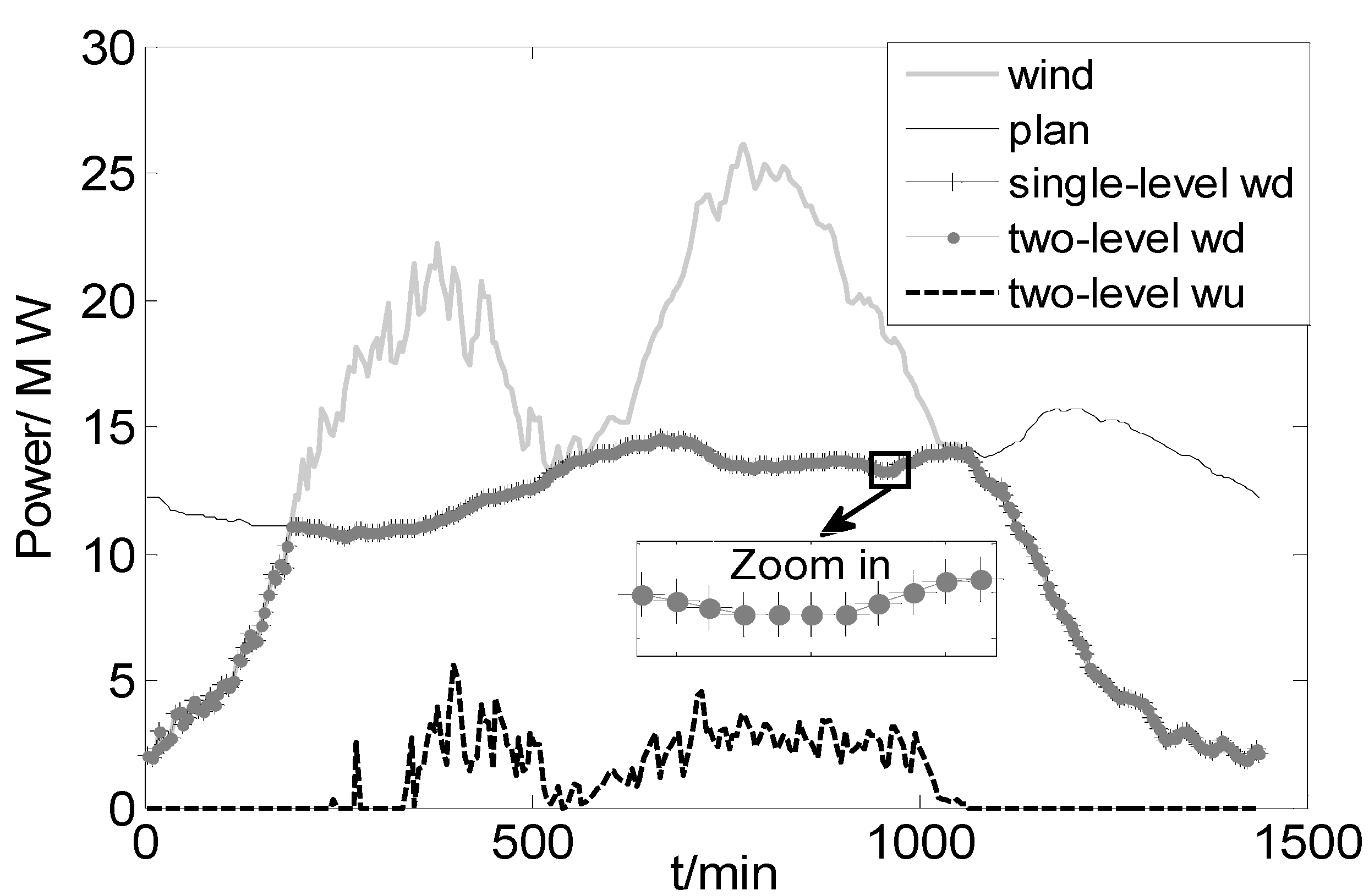
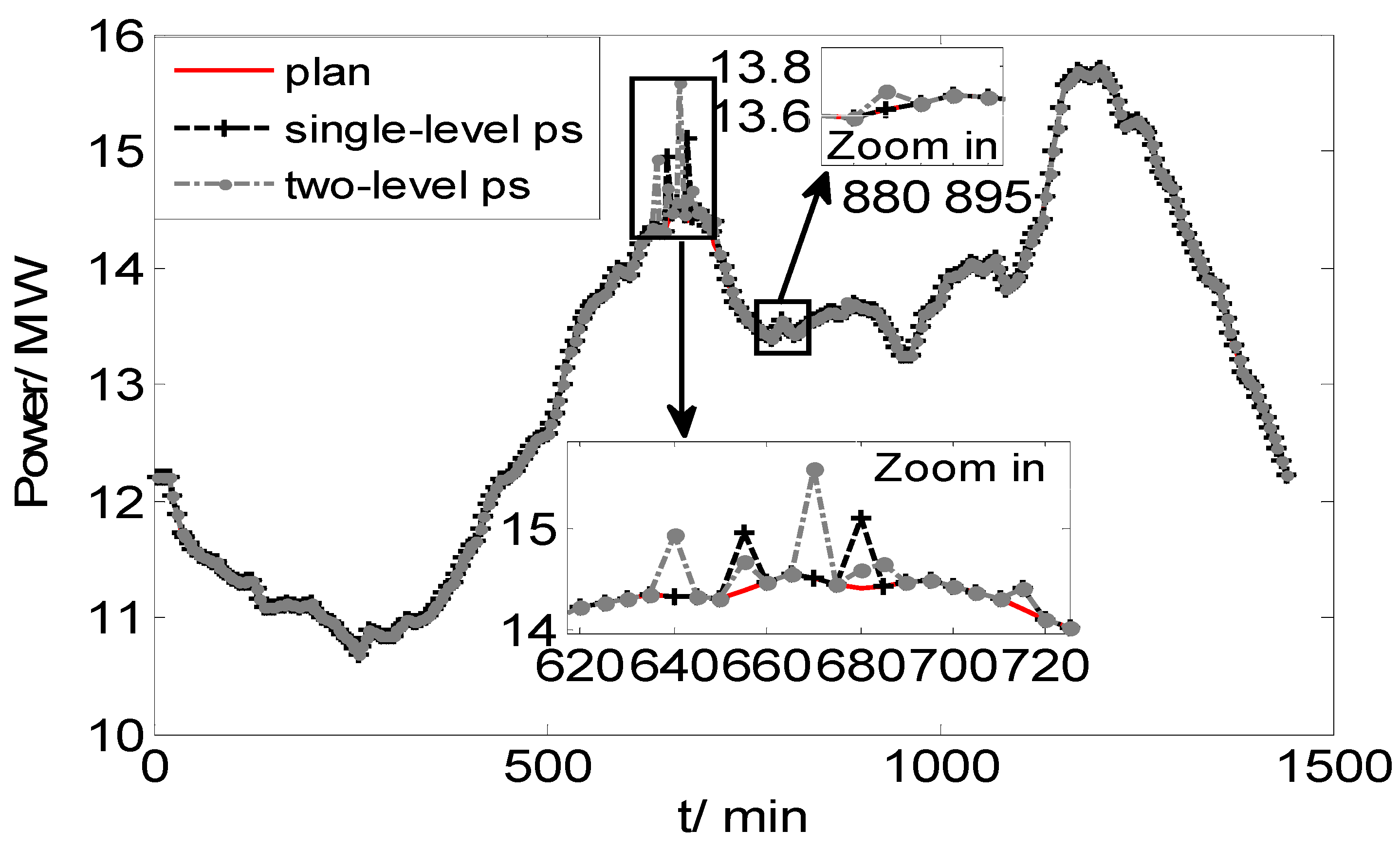
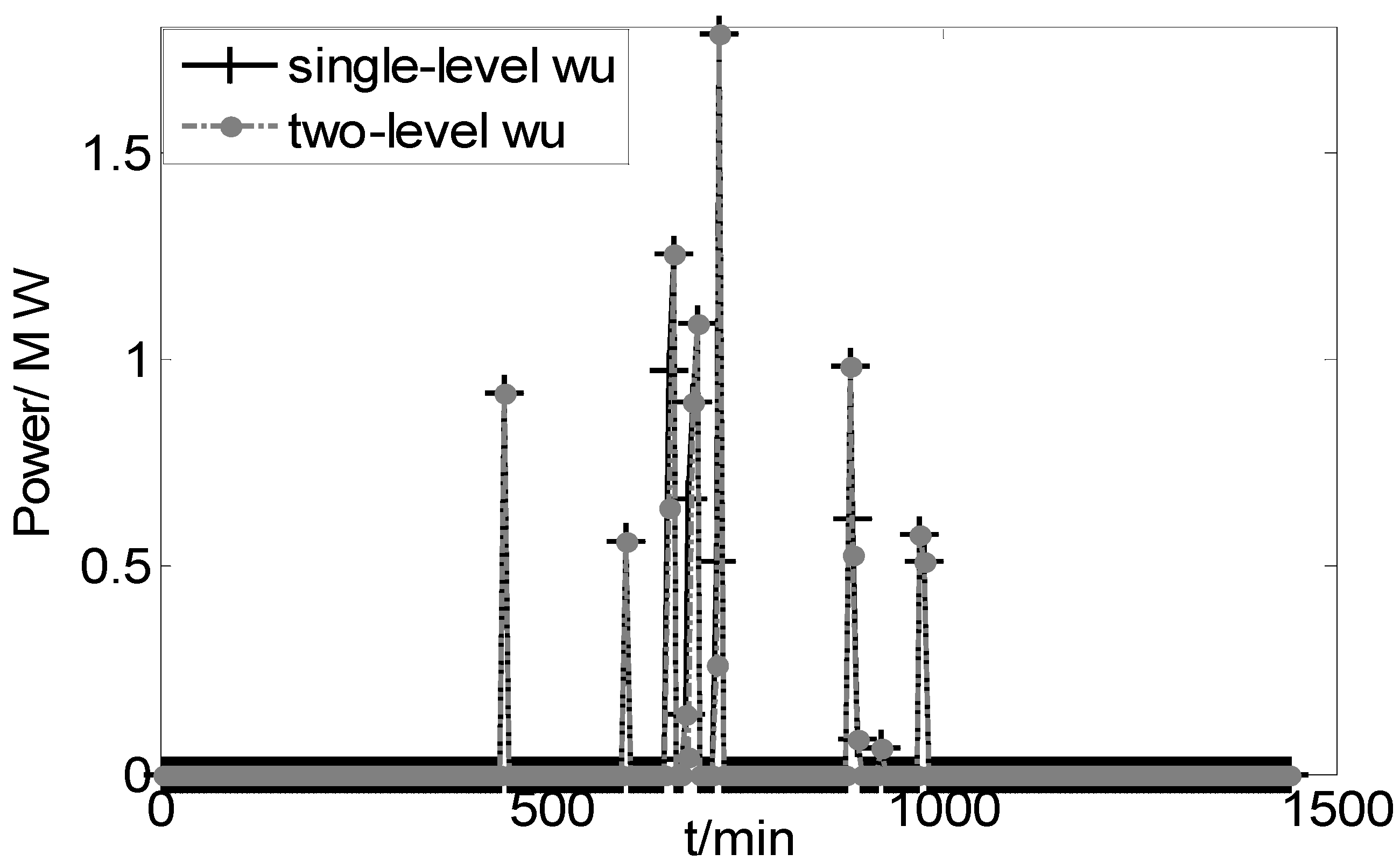
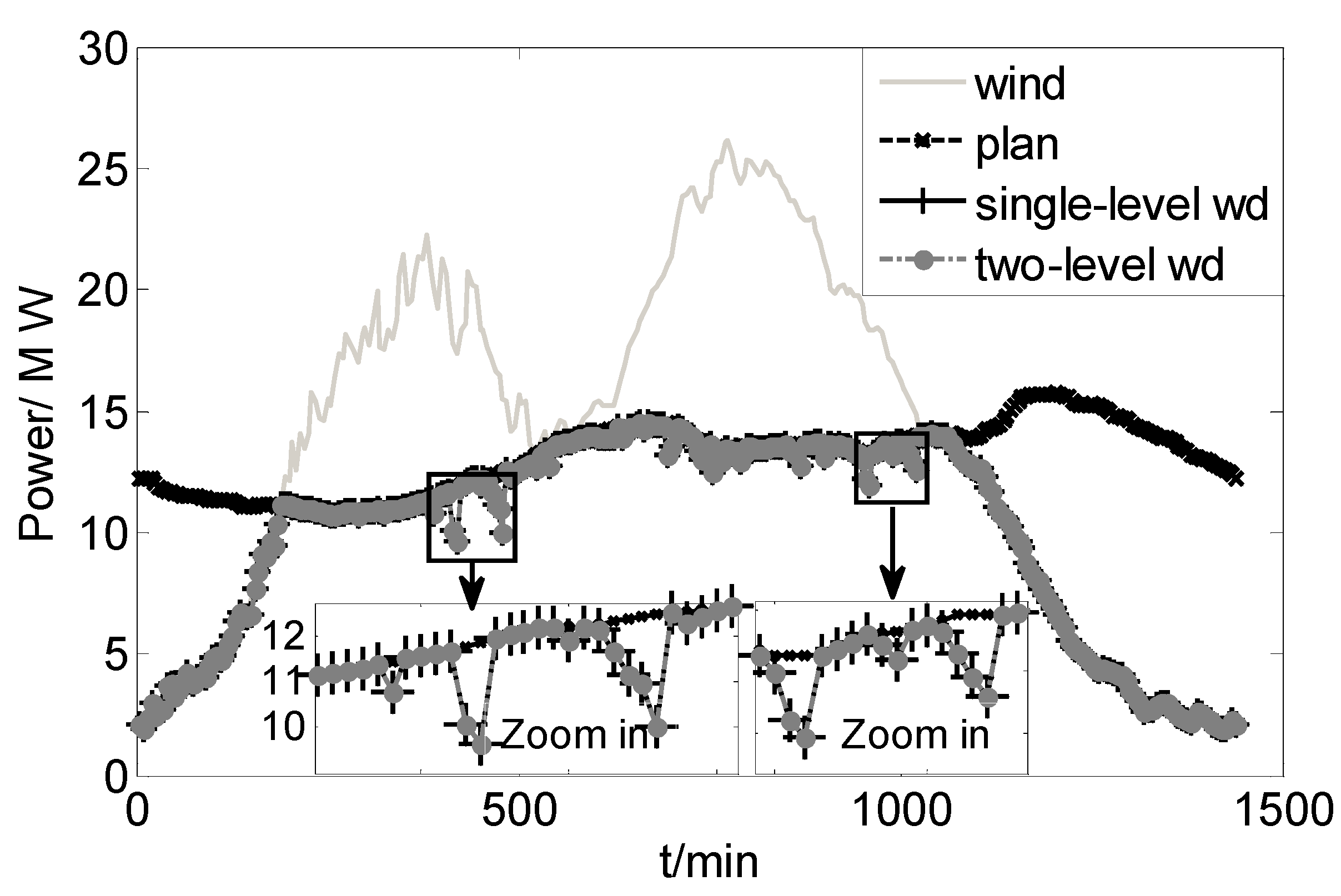
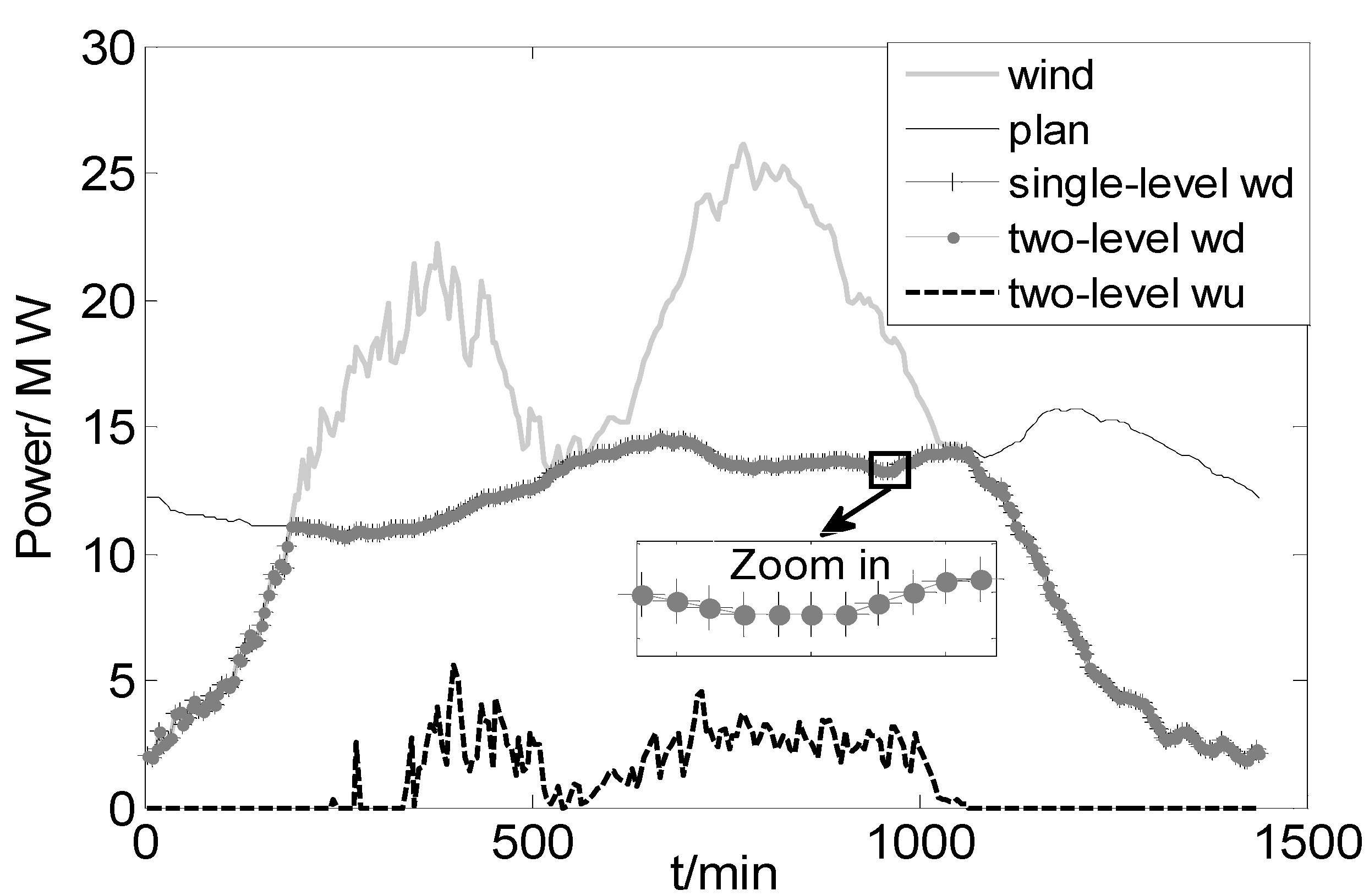
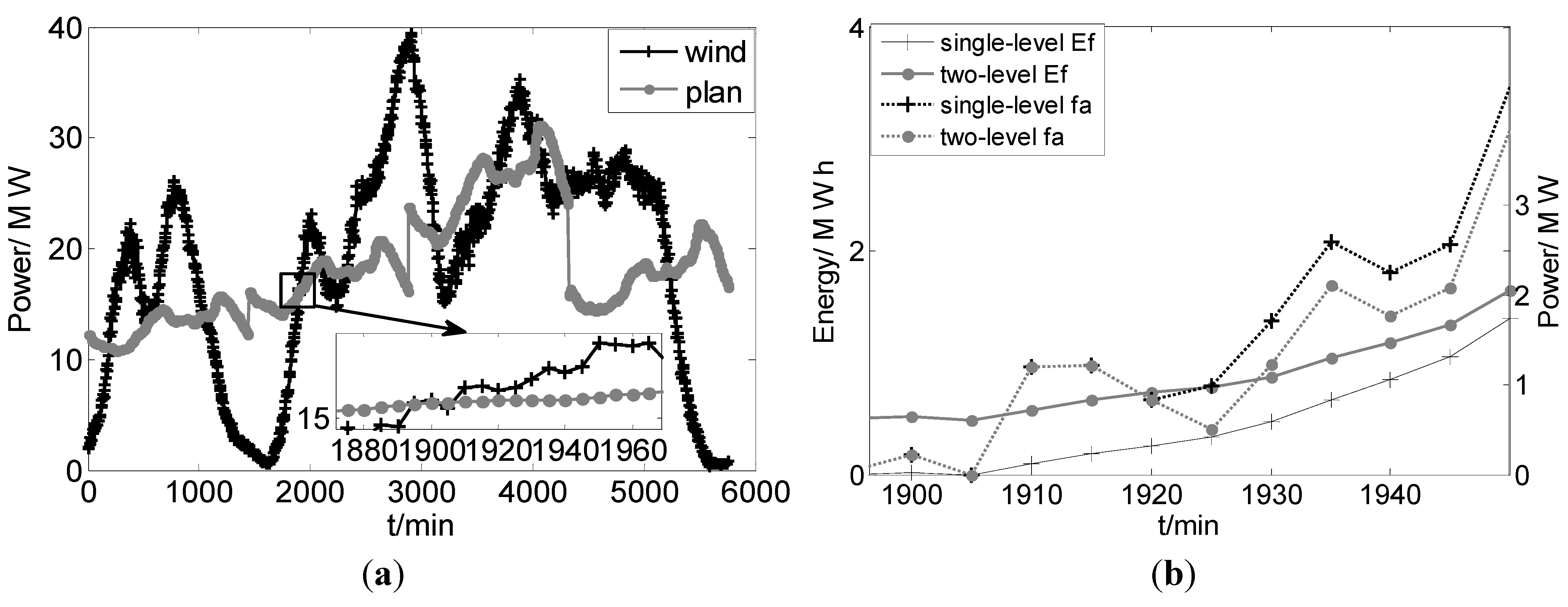
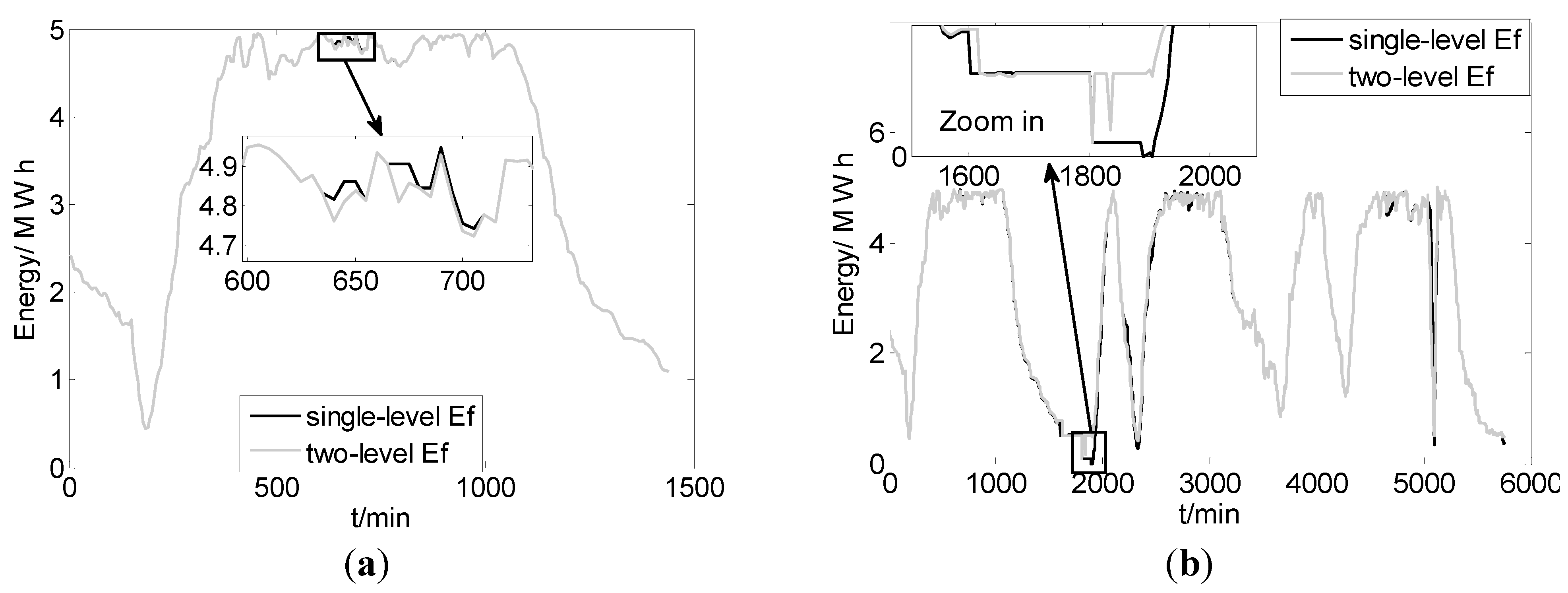
5.1. Simulation Test for Three Sub-Objectives Based on Single-Level and Two-Level MPC
| Values | Time(min) | ||||
|---|---|---|---|---|---|
| 435 | 440 | 445 | 450 | 455 | |
| /MW | 12.18 | 12.19 | 12.20 | 12.21 | 12.26 |
| /MW | 20.15 | 20.16 | 16.26 | 18.45 | 17.39 |
| /MW | 12.18 | 12.19 | 9.86 | 12.21 | 12.26 |
| /MW | 6.39 | 6.39 | 6.39 | 4.51 | 4.51 |
| /MW | 0.66 | 2.42 | 0 | 1.73 | 0.62 |
| /MW·h | 98.58 | 99.03 | 99.48 | 99.80 | 100.1 |
| /MW·h | 4.809 | 5.0 | 4.80 | 4.93 | 4.98 |


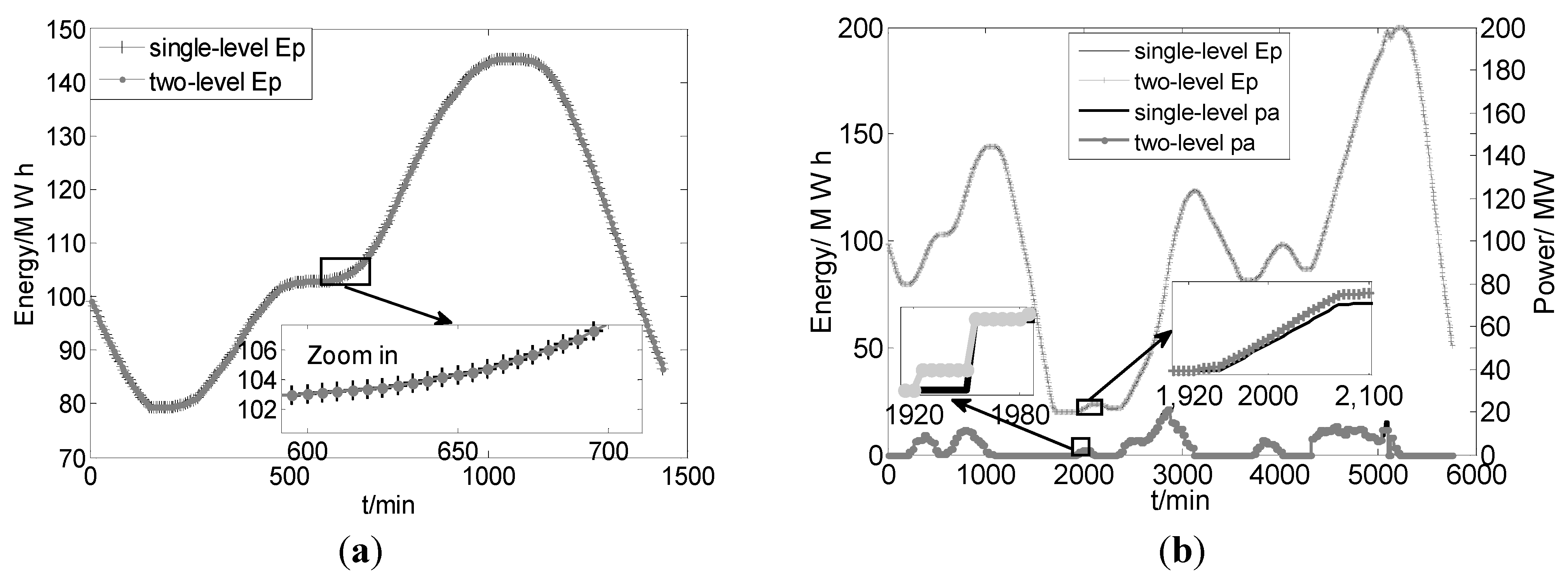
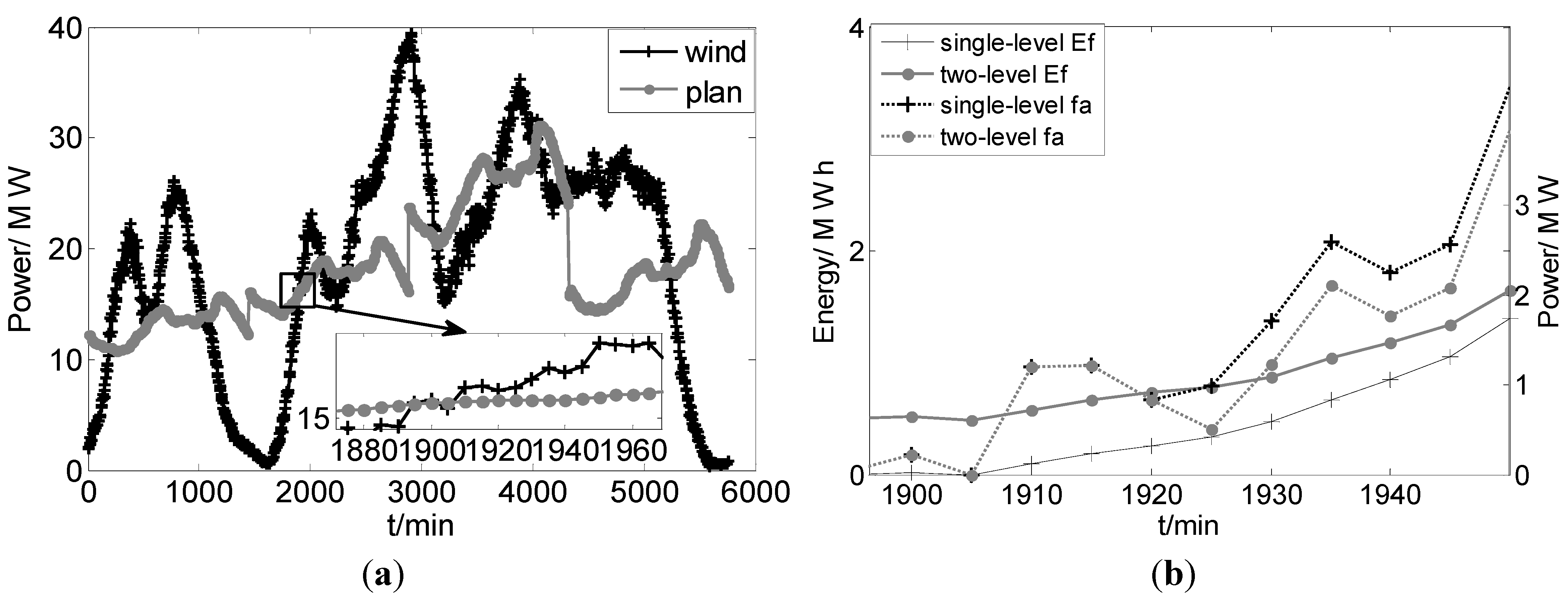
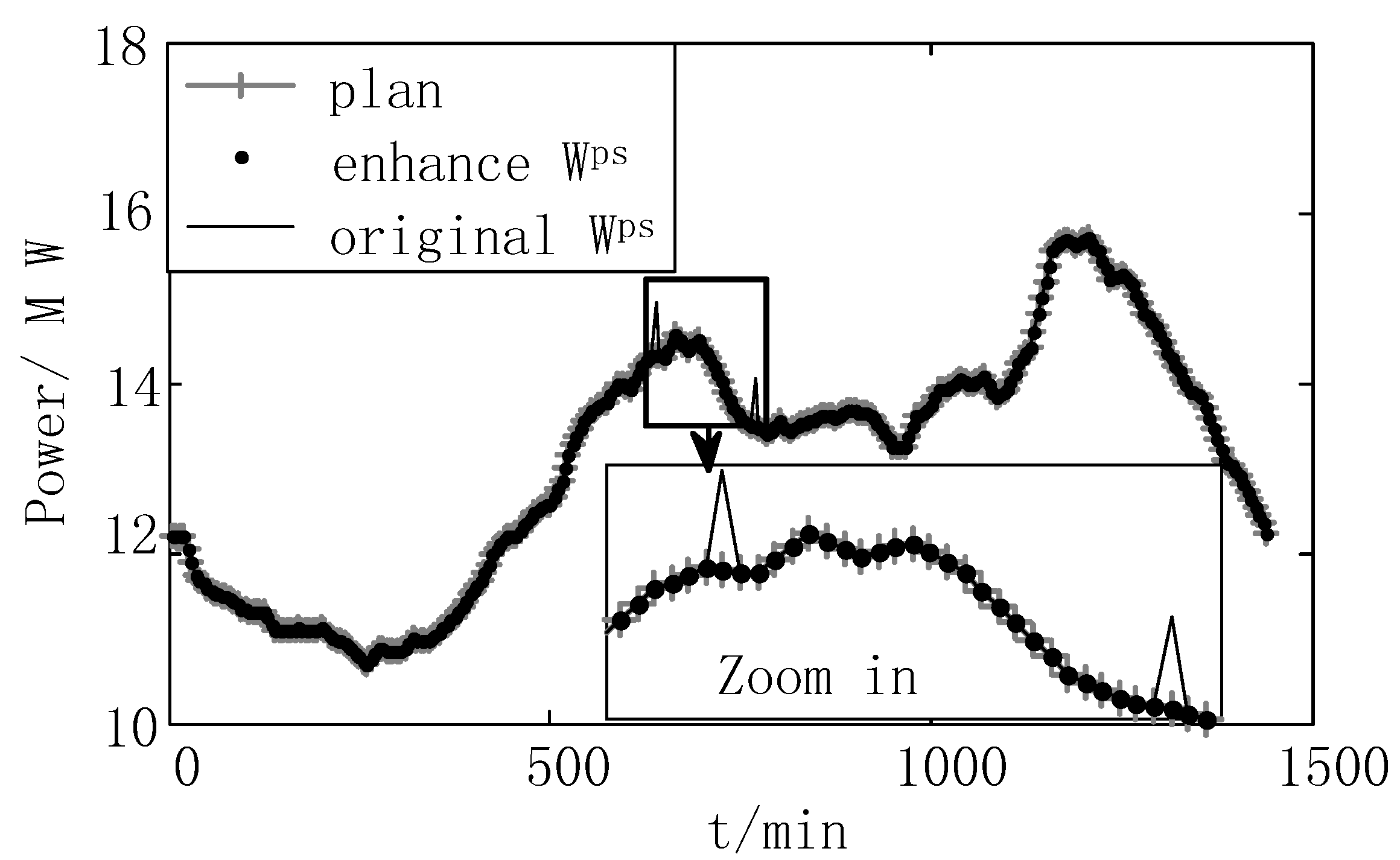
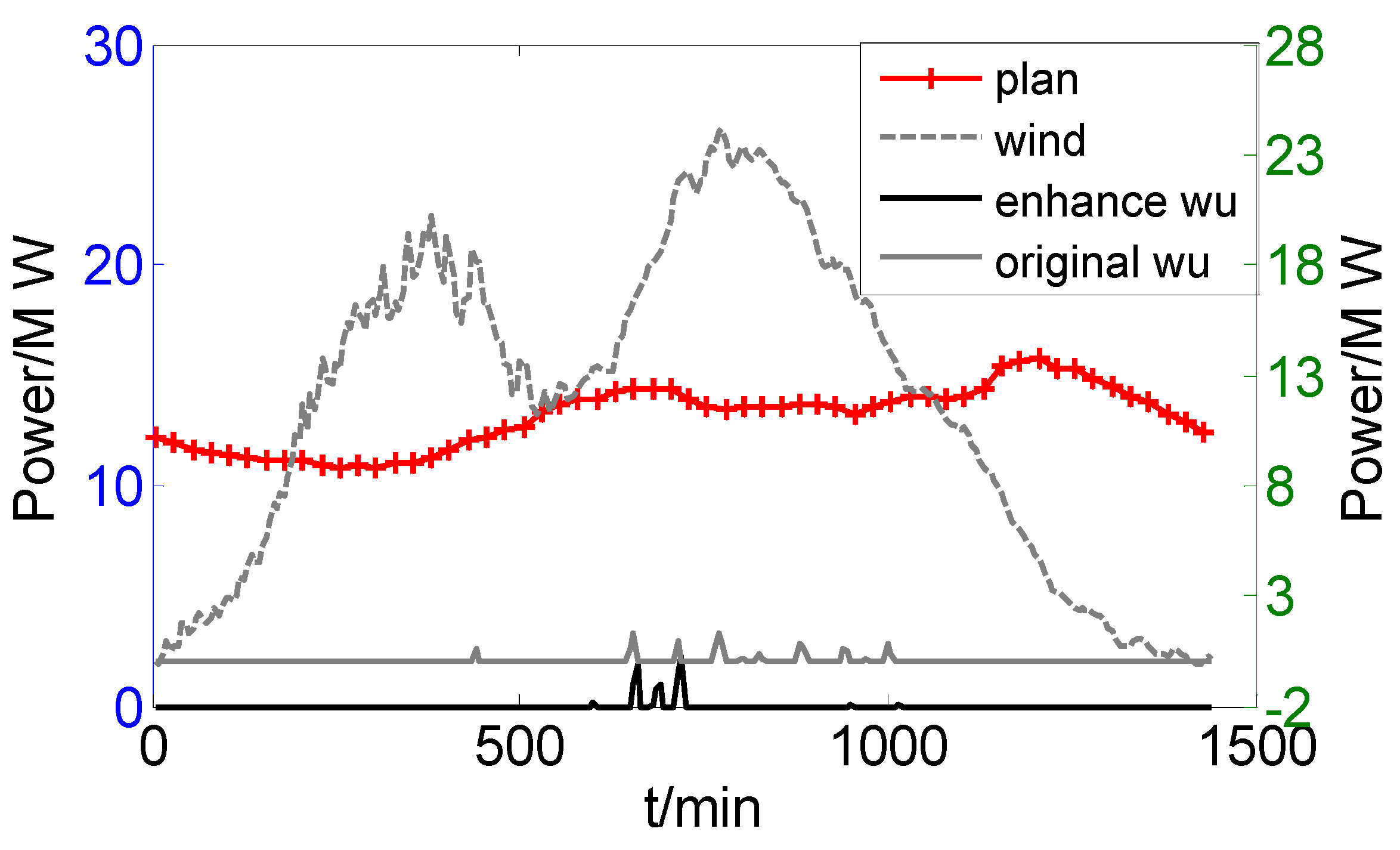
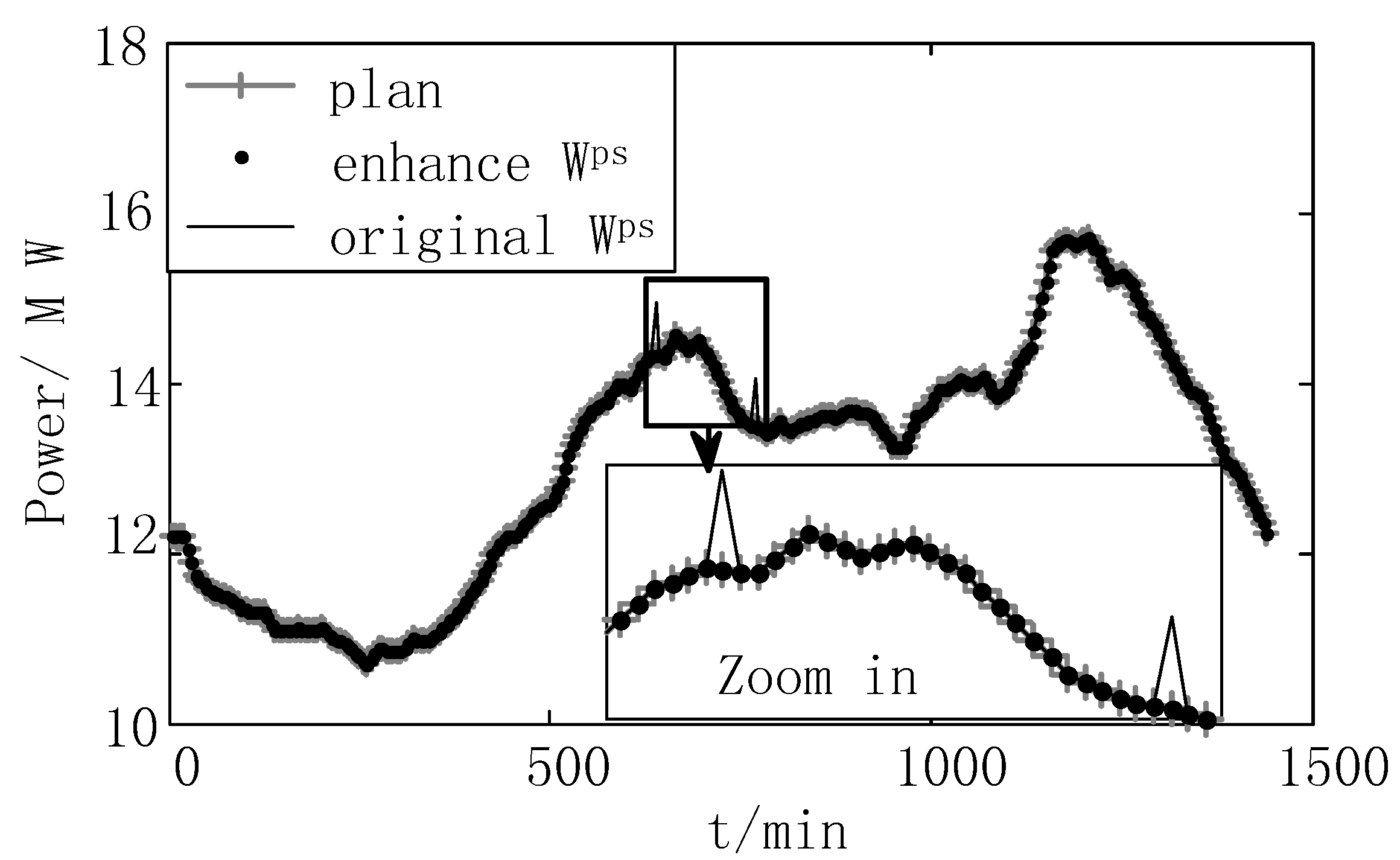
5.2. Simulation Test for Strengthening the Weighting Coefficients of the First Scheduling Interval
| Values | Time (min) | ||||
|---|---|---|---|---|---|
| 435 | 440 | 445 | 450 | 455 | |
| /MW | 12.18 | 12.19 | 12.20 | 12.21 | 12.26 |
| /MW | 20.15 | 20.16 | 16.26 | 18.45 | 17.39 |
| /MW | 6.39 | 6.39 | 6.39 | 4.51 | 4.51 |
| /MW | 1.581 | 1.507 | 0 | 1.729 | 0.619 |
| /MWh | 0 | 0 | 2.34 | 0 | 0 |
| /MW | 12.18 | 12.19 | 9.86 | 12.21 | 12.26 |
| /MW·h | 98.58 | 99.03 | 99.48 | 99.80 | 100.1 |
| /MW·h | 4.881 | 5.0 | 4.80 | 4.98 | 4.89 |
| /MW | 0 | 0.917 | 0 | 0 | 0 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
Acronyms
| FLC | fuzzy logic control |
| GSM | global system for mobile communications |
| MINLP | mixed-integer nonlinear programming |
| MPC | model prediction control |
| MPC 1 | short-term MPC |
| MPC 2 | long-term MPC |
| SMES | superconducting magnetic energy storage |
Variable of Model
available wind power [MW] | |
generated wind power sent to the grid [MW] | |
pumped power of the pumped hydro storage [MW] | |
charging power of the fly wheel storage [MW] | |
wind curtailment [MW] | |
total power generation of the wind power storage system [MW] | |
power generation of the pumped hydro storage [MW] | |
power generation of the fly wheel storage [MW] | |
energy of the pumped hydro storage at time t [MWh] | |
pumped hydro storage system pumped and generation efficiency ratios. | |
time period ( = 5/60 = 1/12) [h] | |
energy of the fly wheel system at time t [MWh] | |
fly wheel charging and discharging efficiency ratios | |
| Case i | the No i initial condition of MPC |
| ts | the serial number of the scheduling interval |
| wi | The weight factor of the No. i sub-objective |
| Ep | energy of the pumped hydro storage(used in Figure) [MWh] |
| pa | pumped power of the pumped hydro storage(used in Figure) [MW] |
| Ef | energy of the fly wheel system(used in Figure) [MWh] |
| fa | charging power of the fly wheel storage(used in Figure) [MW] |
| wd | generated wind power sent to the grid(used in Figure) [MW] |
| wu | wind curtailment(used in Figure) [MW] |
References
- Breton, S.P.; Moe, G. Status, plans and technologies for offshore wind turbines in Europe and North America. Renew. Energy 2009, 34, 646–654. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, F.; Wu, J. Optimal bidding strategies for wind power producers in the day-ahead electricity market. Energies 2012, 5, 4804–4823. [Google Scholar] [CrossRef]
- Teleke, S.; Baran, M.E.; Huang, A.Q. Control strategies for battery energy storage for wind farm dispatching. IEEE Trans. Energy Convers. 2009, 24, 725–732. [Google Scholar] [CrossRef]
- Wang, X.Y.; Mahinda Vilathgamuwa, D.; Choi, S.S. Determination of battery storage capacity in energy buffer for wind farm. IEEE Trans. Energy Convers. 2008, 23, 868–878. [Google Scholar] [CrossRef]
- Khalid, M.; Savkin, A.V. Model predictive control for wind power generation smoothing with controlled battery storage. In Proceedings of the 2009 Joint 48th IEEE Conference on Decision and Control (CDC) and 28th Chinese Control Conference (CCC 2009), Shanghai, China, 15–18 December 2009; pp. 7849–7853.
- Yi, Z.; Songzhe, Z.; Chowdhury, A.A. Reliability modeling and control schemes of composite energy storage and wind generation system with adequate transmission upgrades. IEEE Trans. Sustain. Energy 2011, 2, 520–526. [Google Scholar]
- Khatamianfar, A.; Khalid, M.; Savkin, A.V. Wind power dispatch control with battery energy storage using model predictive control. In Procedings of the 2012 IEEE International Conference on Control Applications (CCA), Dubrovnik, Croatia, 3–5 October 2012; pp. 733–738.
- DufoLópez, R.; BernalAgustín, J.L.; DomínguezNavarro, J.A. Generation management using batteries in wind farms: Economical and technical analysis for spain. Energy Policy 2009, 37, 126–139. [Google Scholar] [CrossRef]
- Chao, G.; Ye, Z.; Hao, Z. Optimal Storage Sizing for Composite Energy Storage and Wind in Micro Grid. In Proceedings of the 2014 14th International Conference on Environment and Electrical Engineering (EEEIC), Krakow, Poland, 10–12 May 2014; pp. 286–290.
- Duong, T.; Haihua, Z.; Khambadkone, A.M. Energy management and dynamic control in composite energy storage system for micro-grid applications. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 1818–1824.
- Wang, Z.; Li, G.; Li, G.; Yue, H. Studies of multi-type composite energy storage for the photovoltaic generation system in a micro-grid. In Proceedings of the 2011 4th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Weihai, China, 6–9 July 2011; pp. 791–796.
- Abbey, C.; Strunz, K.; Joos, G. A knowledge-based approach for control of two-level energy storage for wind energy systems. IEEE Trans. Energy Convers. 2009, 24, 539–547. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, B.; hao, Z. Control of composite energy storage system in wind and pv hybrid microgrid. In Proceedings of the 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013), Xian, China, 22–25 October 2013; pp. 1–5.
- Tan, X.; Wang, H.; Li, Q. Multi-port topology for composite energy storage and its control strategy in micro-grid. In Proceedings of the 2012 7th International Power Electronics and Motion Control Conference (IPEMC), Harbin, China, 2–5 June 2012; pp. 351–355.
- Zadeh, A.K.; Abdel-Akher, M.; Wang, M.; Senjyu, T. Optimized day-ahead hydrothermal wind energy systems scheduling using parallel pso. In Proceedings of the 2012 International Conference on Renewable Energy Research and Applications (ICRERA), Nagasaki, Janpan, 11–14 November 2012; pp. 1–6.
- Marzband, M.; Sumper, A.; Ruiz-Alvarez, A. Experimental evaluation of a real time energy management system for stand-alone microgrids in day-ahead markets. Appl. Energy 2013, 106, 365–376. [Google Scholar] [CrossRef]
- Marzband, M.; Ghadimi, M.; Sumper, A. Experimental validation of a real-time energy management system using multi-period gravitational search algorithm for microgrids in islanded mode. Appl. Energy 2014, 128, 164–174. [Google Scholar] [CrossRef] [Green Version]
- Kassem, A.M.; Zaid, S.A. Load parameter waveforms improvement of a stand-alone wind-based energy storage system and takagi-sugeno fuzzy logic algorithm. IET Renew. Power Gener. 2014, 8, 775–785. [Google Scholar] [CrossRef]
- Romaus, C.; Gathmann, K.; Bo, X.; Cker, J. Optimal energy management for a hybrid energy storage system for electric vehicles based on stochastic dynamic programming. In Proceedings of the Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010; pp. 1–6.
- Marzband, M.; Sumper, A.; Dominguez-Garcia, J.; Gumara-Ferret, R. Experimental validation of a real time energy management system for microgrids in islanded mode using a local day-ahead electricity market and minlp. Energy Convers. Manag. 2013, 76, 314–322. [Google Scholar] [CrossRef]
- Qi, W.; Liu, J.; Christofides, P.D. Supervisory predictive control for long-term scheduling of an integrated wind/solar energy generation and water desalination system. IEEE Trans. Control Syst. Technol. 2012, 20, 504–512. [Google Scholar] [CrossRef]
- Yonghao, G.; Chung, H.K.; Chung, C.C.; Yong-Cheol, K. Intra-day unit commitment for wind farm using model predictive control method. In Proceedings of the 2013 IEEE, UPower and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5.
- Mayhorn, E.; Kalsi, K.; Elizondo, M.; Wei, Z.; Shuai, L.; Samaan, N.; Butler-Purry, K. Optimal control of distributed energy resources using model predictive control. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8.
- Qi, W.; Liu, J.; Christofides, P.D. A two-time-scale framework to supervisory predictive control of an integrated wind/solar energy generation and water desalination system. In Proceedings of the American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011; pp. 2677–2682.
- Teleke, S.; Baran, M.E.; Bhattacharya, S.; Huang, A.Q. Optimal control of battery energy storage for wind farm dispatching. IEEE Trans. Energy Convers. 2010, 25, 787–794. [Google Scholar] [CrossRef]
- Khalid, M.; Savkin, A.V. A model predictive control approach to the problem of wind power smoothing with controlled battery storage. Renew. Energy 2010, 35, 1520–1526. [Google Scholar] [CrossRef]
- Xie, L.; Gu, Y.; Eskandari, A.; Ehsani, M. Fast mpc-based coordination of wind power and battery energy storage systems. J. Energy Eng. 2012, 138, 43–53. [Google Scholar] [CrossRef]
- Khatamianfar, A.; Khalid, M.; Savkin, A.V.; Agelidis, V.G. Improving wind farm dispatch in the australian electricity market with battery energy storage using model predictive control. IEEE Trans. Sustain. Energy 2013, 4, 745–755. [Google Scholar] [CrossRef]
- Scattolini, R. Architectures for distributed and hierarchical model predictive control—A review. J. Process Control 2009, 19, 723–731. [Google Scholar] [CrossRef]
- Westermann, D.; Nicolai, S.; Bretschneider, P. Energy management for distribution networks with storage systems—A hierarchical approach. In Proceedings of the Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–6.
- Kennel, F.; Gorges, D.; Liu, S. Energy management for smart grids with electric vehicles based on hierarchical mpc. IEEE Trans. Ind. Inf. 2013, 9, 1528–1537. [Google Scholar] [CrossRef]
- Li, K.; Xu, H.; Ma, Q.; Zhao, J. Hierarchy control of power quality for wind—Battery energy storage system. IET Power Electron. 2014, 7, 2123–2132. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y. Optimal energy management of wind-battery hybrid power system with two-scale dynamic programming. IEEE Trans. Sustain. Energy 2013, 4, 765–773. [Google Scholar] [CrossRef]
- Paatero, J.V.; Lund, P.D. Effect of energy storage on variations in wind power. Wind Energy Wiley 2005, 8, 421–441. [Google Scholar] [CrossRef]
- Feng, G.; Hallam, A.; Chien-Ning, Y. Wind generation scheduling with pump storage unit by collocation method. In Proceedings of the 2099. PES’09. IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–8.
- Marzband, M.; Azarinejadian, F.; Savaghebi, M.; Guerrero, J.M. An optimal energy management system for islanded microgrids based on multiperiod artificial bee colony combined with markov chain. IEEE Syst. J. 2015. [Google Scholar] [CrossRef]
- Meng, X.; Feng, G.; Zhang, H. Optimization design for hybrid energy storage device in wind farm taking scheduling into account. Power Syst. Technol. 2014, 38, 1853–1860. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, M.; Gao, F.; Liu, K.; Chen, S.; Dong, J. Optimal Real-Time Scheduling for Hybrid Energy Storage Systems and Wind Farms Based on Model Predictive Control. Energies 2015, 8, 8020-8051. https://doi.org/10.3390/en8088020
Xiong M, Gao F, Liu K, Chen S, Dong J. Optimal Real-Time Scheduling for Hybrid Energy Storage Systems and Wind Farms Based on Model Predictive Control. Energies. 2015; 8(8):8020-8051. https://doi.org/10.3390/en8088020
Chicago/Turabian StyleXiong, Meng, Feng Gao, Kun Liu, Siyun Chen, and Jiaojiao Dong. 2015. "Optimal Real-Time Scheduling for Hybrid Energy Storage Systems and Wind Farms Based on Model Predictive Control" Energies 8, no. 8: 8020-8051. https://doi.org/10.3390/en8088020