1. Introduction
Increasing demands for more efficient engines and stringent limits on exhaust gas pollution require more accurate control of engine operating parameters, especially under transient conditions. EGR is an effective technology to reduce NO
x emissions from diesel engines. The traditional EGR control can be divided into open loop control and closed loop control. In open loop control, according to the current conditions and the steady-state control MAP, the EGR valve opening is adjusted by the control system. This control method is simple, but has low precision because the engine operation parameter variation under transient conditions are not considered. In order to improve the control precision, the closed loop EGR control system was developed and tested. The closed loop EGR control mainly includes two categories, EGR valve opening control and EGR rate control. For the EGR valve opening control, according to the MAP of EGR rate, the optimum EGR rate with certain conditions is calculated by the control system. Based on the EGR valve opening MAP, the target EGR valve opening is calculated. Finally, based on the target and actual EGR valve opening, the EGR valve is controlled by a PID controller. This control mode is more common because it has good control effects under steady-state conditions, but under transient condition, EGR valve opening cannot completely reflect the real EGR rate, so it is unable to realize an accurate EGR rate control. For the EGR rate control, the EGR rate estimation method based on the air flow is often used [
1]. The target EGR rate is identified firstly by the control system based on the EGR rate MAP, then the target air flow is calculated based on the air flow MAP, finally, according to the desired and real air flow, the EGR valve is controlled by a PID controller. In this control mode, it is assumed that the amount of intake gas does not change under certain conditions, however, with the poor transient response of the turbocharger, the amount of intake gas will change a lot during transient conditions which may lower the control precision of the EGR rate.
The traditional EGR control method without fully considering the properties of inertial components under transient operation conditions makes the EGR system unable to operate with optimum behavior under transient conditions, which may result in a deterioration of the transient emissions. Research on transient EGR control has been presented in recent years [
2,
3,
4,
5,
6], most of which control methods are based on PID output feedback control algorithms. The EGR rate, excess air coefficient and intake oxygen concentration are often adopted as feedback parameters. With the development of modern control theory, more and more new control algorithm have gradually been applied in diesel engine air system control (EGR control and variable geometry turbocharger or VGT control), such as model based predictive control [
7], linear quadratic gaussion control [
8], and the nonlinear Sliding Mode Control [
9],
etc. All these control methods improve the control precision and response properties of the controller. The state feedback control is the most basic control form of modern control theory. Compared to the traditional output feedback control, the state feedback control can effectively improve the performance of the system [
10].
For the transient EGR control of the turbocharged diesel engine, because the control object is complex and the control requirements are very high, new control methods are needed. In this paper, a method based on state feedback control is proposed to control EGR systems. Firstly, the dynamic model of the air system is developed. Then according to the control requirements, the model is simplified. After that, the model is linearized according to the linear theory. Using the data simulated by a calibrated GT-Power model at a certain operation point, all these characteristics of the state space model (controllability, observability and stability), are analyzed. A state feedback controller based on the intake oxygen mass fraction has been designed to control the EGR system. Since the intake oxygen mass fraction cannot be measured directly, a method to estimate the intake oxygen mass fraction has been proposed in this paper. The control strategy is evaluated by using a co-simulation with GT-Power and Matlab/Simulink. Finally, the designed controller is tested on a light-duty turbocharged diesel engine with an EGR system. Compared with the PID controller, the control effects of the state feedback controller are greatly improved and the performance of the state feedback controller is verified by the experimental results.
2. Dynamic Model
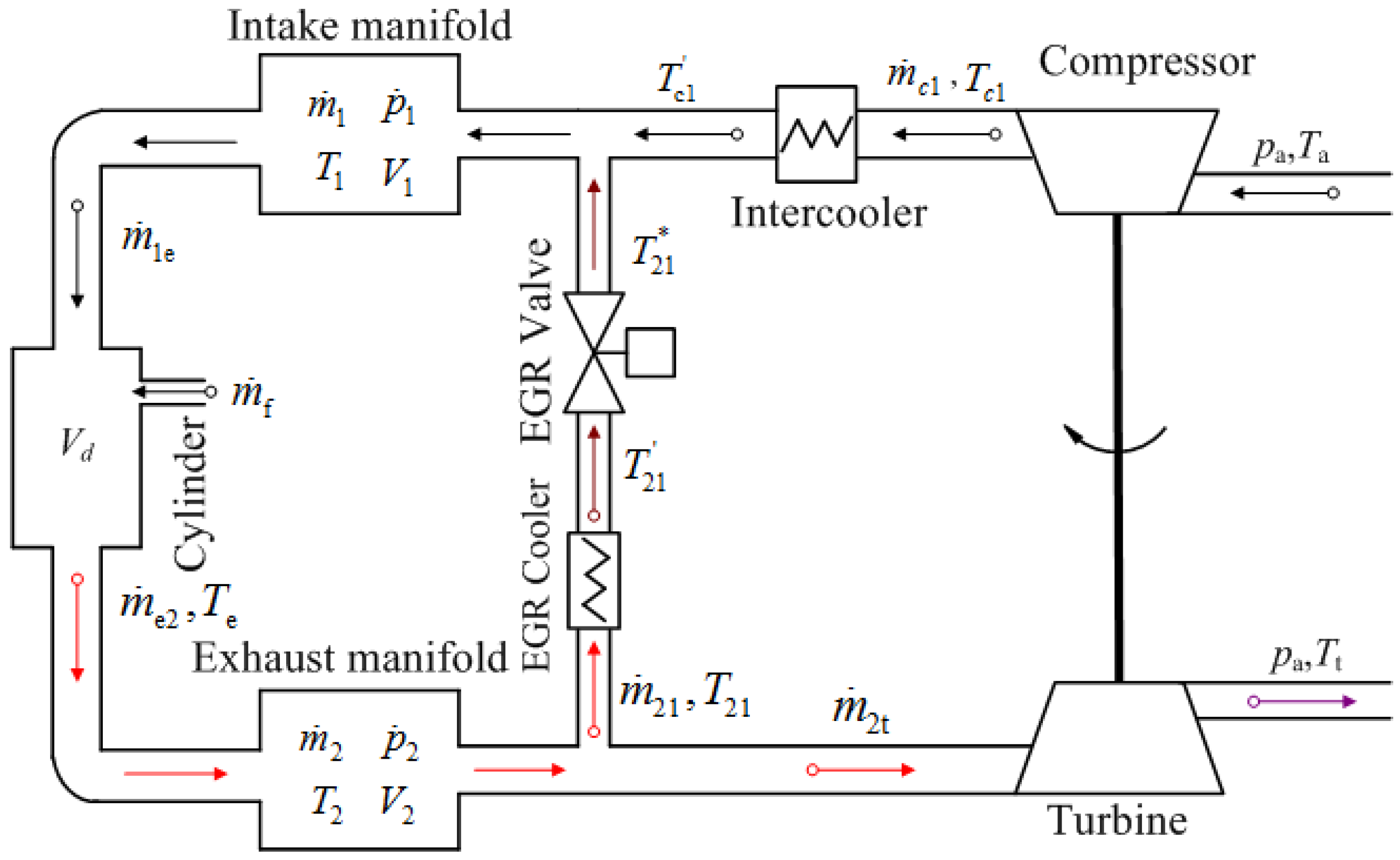
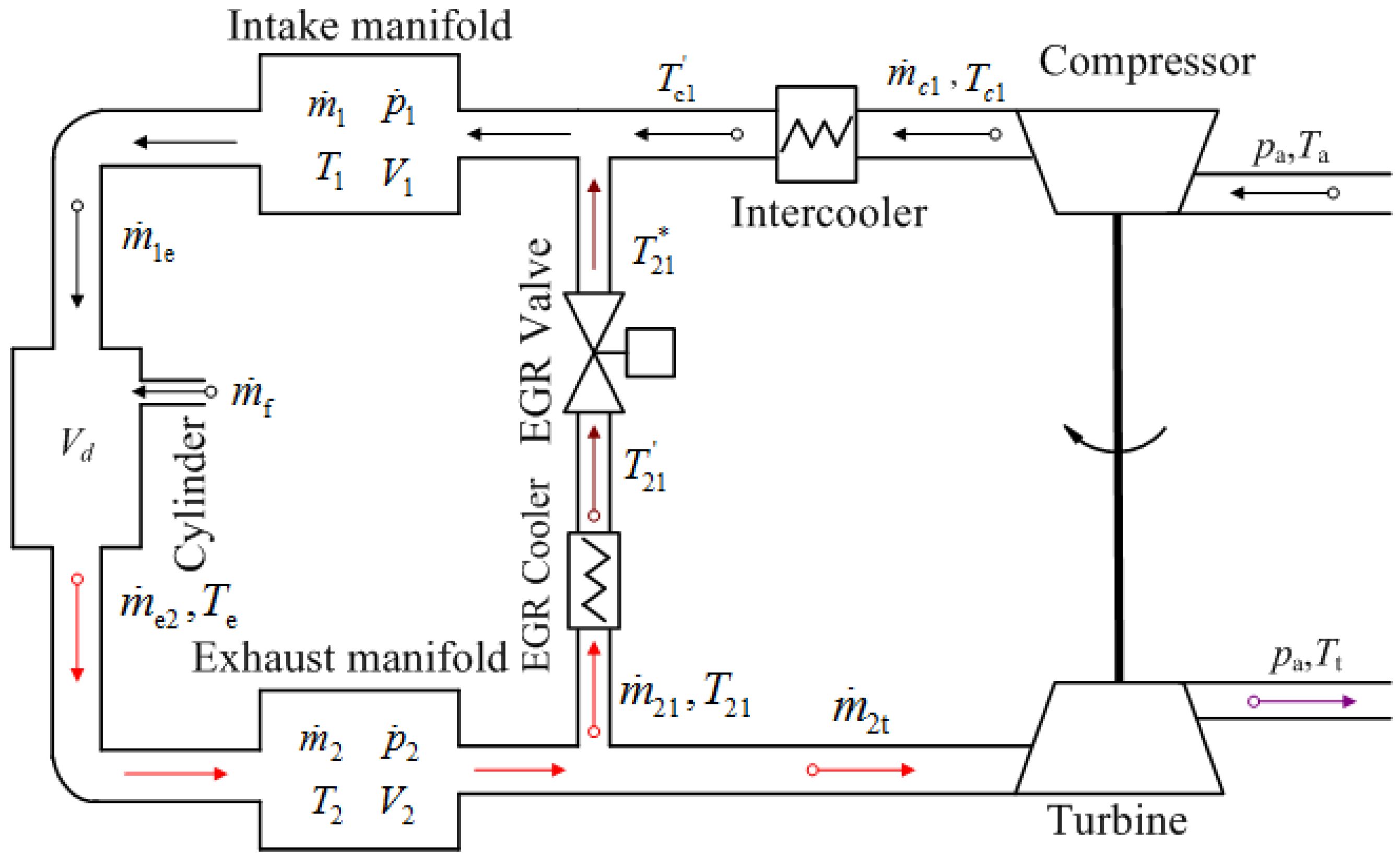
In this paper, the mean value model is developed by using the YC4E170-31 turbocharged diesel engine as a prototype engine. Matlab/Simulink is used as the tool to build the model. The diesel engine system consists of the intake manifold, exhaust manifold, turbocharger, EGR valve, intercooler, EGR cooler and cylinder, as shown in
Figure 1. Detailed descriptions of all these subsystems are given in the following sections.
Figure 1.
Block diagram of turbocharged diesel engine with HP EGR system.
Figure 1.
Block diagram of turbocharged diesel engine with HP EGR system.
2.1. Intake Manifold
Generally, the control volume method is used to build the intake manifold model. It is assumed that the intake manifold temperature is constant, according to the conservation of mass and energy and the ideal gas law, the gas mass, pressure, and air mass fraction of the intake manifold can be derived as [
11]:
where
is the gas flow rate through the compressor;
is the gas flow rate through the EGR valve;
is the gas flow rate into the cylinder;
is the gas flow rate through the intake manifold;
m1 is the gas mass in the intake manifold;
is the outlet temperature of intercooler;
is the inlet temperature of EGR valve;
V1 is the volume of the intake manifold; γ is the specific heat ratio of the air in the intake manifold;
Rg is the gas constant of air in the intake manifold;
F2 is the air mass fraction of the unburned air in the exhaust manifold;
F1 is the total air-mass fraction in the intake manifold.
2.2. Exhaust Manifold
The exhaust manifold is modeled in the same way as the intake manifold:
where
is the mass flow of the exhaust from the cylinder;
is the mass flow of gas through the turbine;
m2 is the mass of gas in the exhaust manifold;
Te,
T2 are the temperature of the gas exhaust from cylinder, the gas in the exhaust manifold;
Fe2 is the mass fraction of unburned air exhausted from cylinder;
V2 is the volume of the exhaust manifold.
2.3. Turbocharger
Turbocharger can be simplified as a first order inertia system with a time constant [
12]:
where η
m is the turbocharger mechanical efficiency; τ
tc is a time constant associated with the structure of the turbocharger. The output power of turbine can be estimated based on the first law of thermodynamics [
13,
14]:
Similarly, the flow of the compressor can be approximated by:
where π
t =
p2/
pa is the expansion ratio of turbine; π
c =
p1/
pa is the boost pressure ratio of compressor; η
t, η
c are the isoentropic efficiency of turbine and compressor respectively. The mass flow of the turbine can be estimated based on the equation of continuity of gas steady flow [
5]:
where
,
Aeff is effective flow area of the turbine nozzle.
The outlet temperature of the compressor can be calculated as [
15]:
2.4. EGR Valve
The EGR flow rate can be approximately calculated by a nozzle orifice equation, and can be simplified as follows:
where
,
is the effective flow area of the EGR valve,
Aref is the reference flow area of the EGR valve;
Cd(
uegr) is the flow coefficient, which is the function of the EGR valve opening rate;
is the temperature downstream of the EGR cooler.
2.5. Coolers
There are two coolers in the whole system: the intercooler and the EGR cooler. Usually the pressure drops across the coolers are neglected, and the temperatures after the coolers can be calculated by the following equations [
16]:
where
Tcool is the coolant temperature; η
c,c, η
c,e are the cooling efficiency of the intercooler and the EGR cooler.
2.6. Cylinder
As the research object is the air system of a diesel engine, the physical model of the cylinder can be relatively simple. The cylinder is simply treated as a material exchange channel for the intake manifold and the exhaust manifold. The dynamic characteristics of the cylinder are neglected, Assuming that the engine speed is as a known input, the mass flow into the cylinder can be calculated by speed density equation [
17]:
where
Ne is the engine speed;
Vd is the cylinder displacement volume; η
vol is the volumetric efficiency of the cylinder, which is a function of the engine speed and intake-exhaust pressure [
18]. Regardless of the residual gas retention, mass flow of exhaust gas from cylinder can be calculated as follows:
The mass fraction of unburned air in the exhaust gas can be calculated with the assumption that the fuel injected into the cylinder is completely burned:
where
is the mass flow of fuel;
is stoichiometric air-fuel ratio.
The exhaust temperature
Te is affected by many factors which can be modeled by usually using steady state date fitting method:
where
is the excess air coefficient.
2.7. Model of the Air System
Through the above analysis, the air system can be described by seven differential equations (Equation (19)):
There are seven states corresponding to these seven differential equations, and these states describe the mass, pressure and elements of the gas in the intake and exhaust manifold, and the dynamic characteristics of the turbocharger.
2.8. Model Simplification and Linearization
2.8.1. Model Simplification
The dynamic model given by Equation (19) is widely applied in analyzing the characteristics of air systems. As this model is too complex, there will be many limits when using the model to design a controller. Thus, the model should be simplified. According to the analysis of [
19], it is more reasonable to select the intake oxygen mass fraction as the control parameter for EGR control. The oxygen mass fraction in the intake manifold and exhaust manifold can be calculated based on mass conservation:
where
XO,air is the oxygen mass fraction of air. The oxygen mass fraction of the exhaust gas can be approximated by
,
l1 is the stoichiometric oxygen fuel ratio. Assuming that the temperature of the intake and exhaust gas not changed in transient condition, the intake and exhaust flow
m1 and
m2 can be calculated by the ideal gas equation [
20], the two states can be removed from the model.
Selecting the state variables
x = [
p1,
p2,
XO,1,
XO,2,
Pc] and the input variable
u =
uegr, the state space equation of the air system can be derived as:
where
Kj (
j = 1, …, 9) can be assumed as a constant in a certain operating condition, the value of these coefficient can be calculated from the following equations:
The intake oxygen mass fraction is chose as control object that means selecting
XO,1 as output variable, the output equation is as follows:
2.8.2. Model Linearization
The state space equations of the air system consists of Equations (22) and (23) which can be characterized as seriously nonlinear. A linearization model should be deduced by adopting the Taylor approximation linearization method [
21]. The model can be linearized in the vicinity of an operating point (
x0,
u0), then the vector matrix of the linearized state space system can be described as follows:
where Δ
x =
x –
x0, Δ
u =
u –
u0, and Δ
y =
y –
y0;
A,
B,
C,
D are the coefficient matrices of the state space model, which can be derived as follows:
As the system is a single-input and single-output system, Δu and Δy are scalar, A is a (5 × 5) dimensional matrix, B is a (5 × 1) dimensional matrix, C is a (1 × 5) dimensional matrix, D is a scalar.
5. Experimental Verification
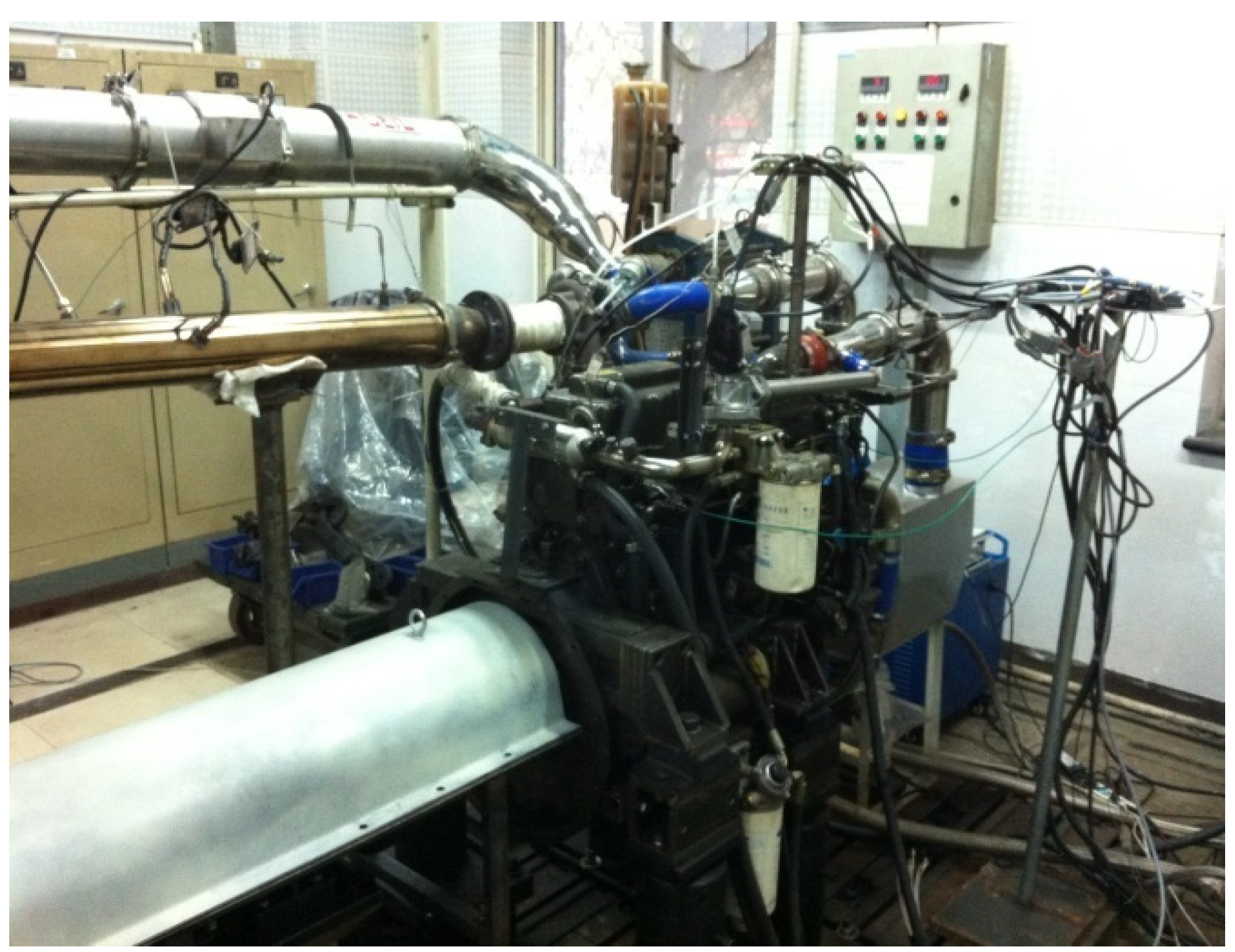
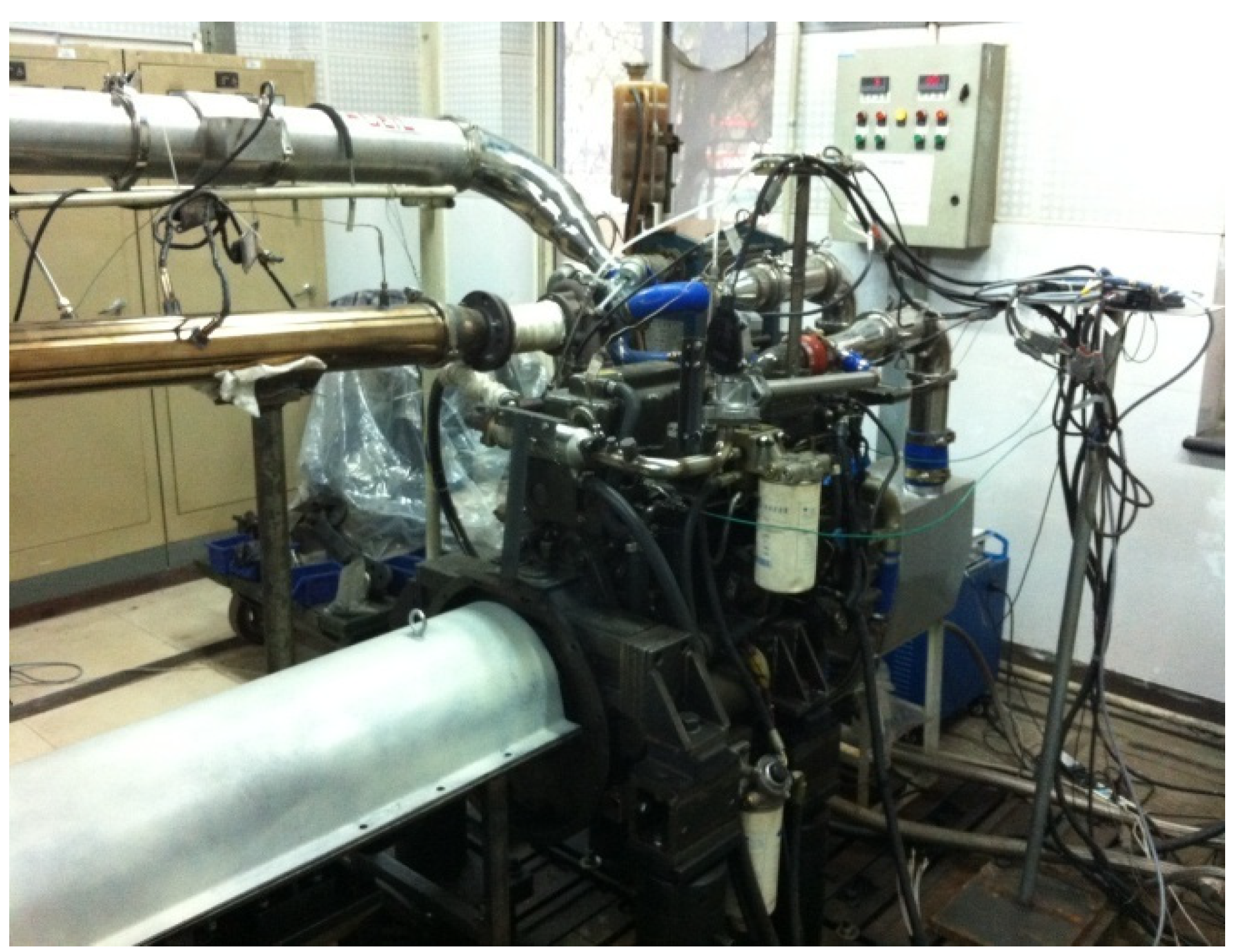
A light-duty diesel engineYC4E170-31 was applied for the experimental evaluation as shown in
Figure 10. The control system designed above was implemented on a bypass controller, which communicates with the ECU by the CAN bus. The following experiments are carried out to verify the designed control system.
Figure 10.
Test bench of YC4E170-31 diesel engine.
Figure 10.
Test bench of YC4E170-31 diesel engine.
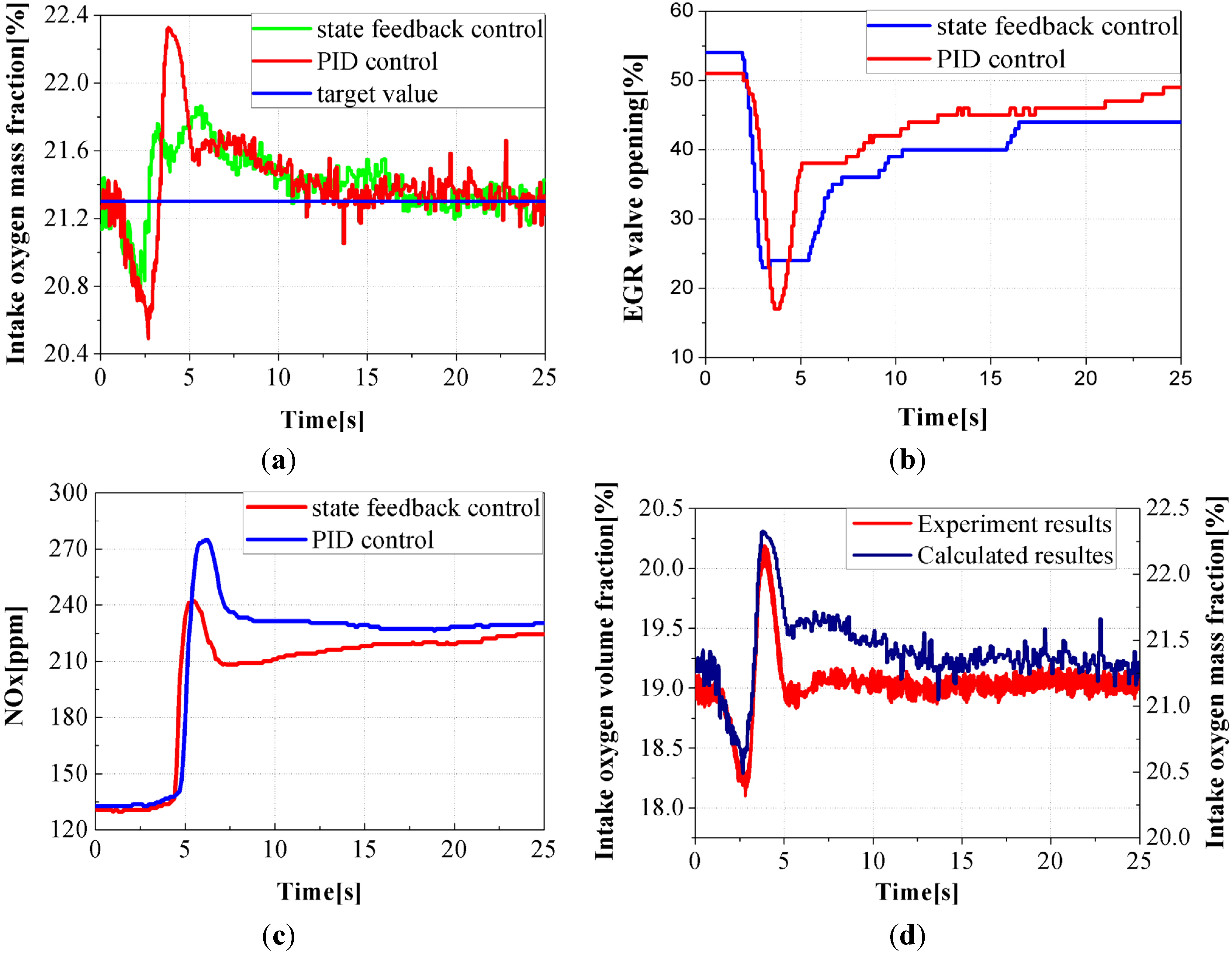
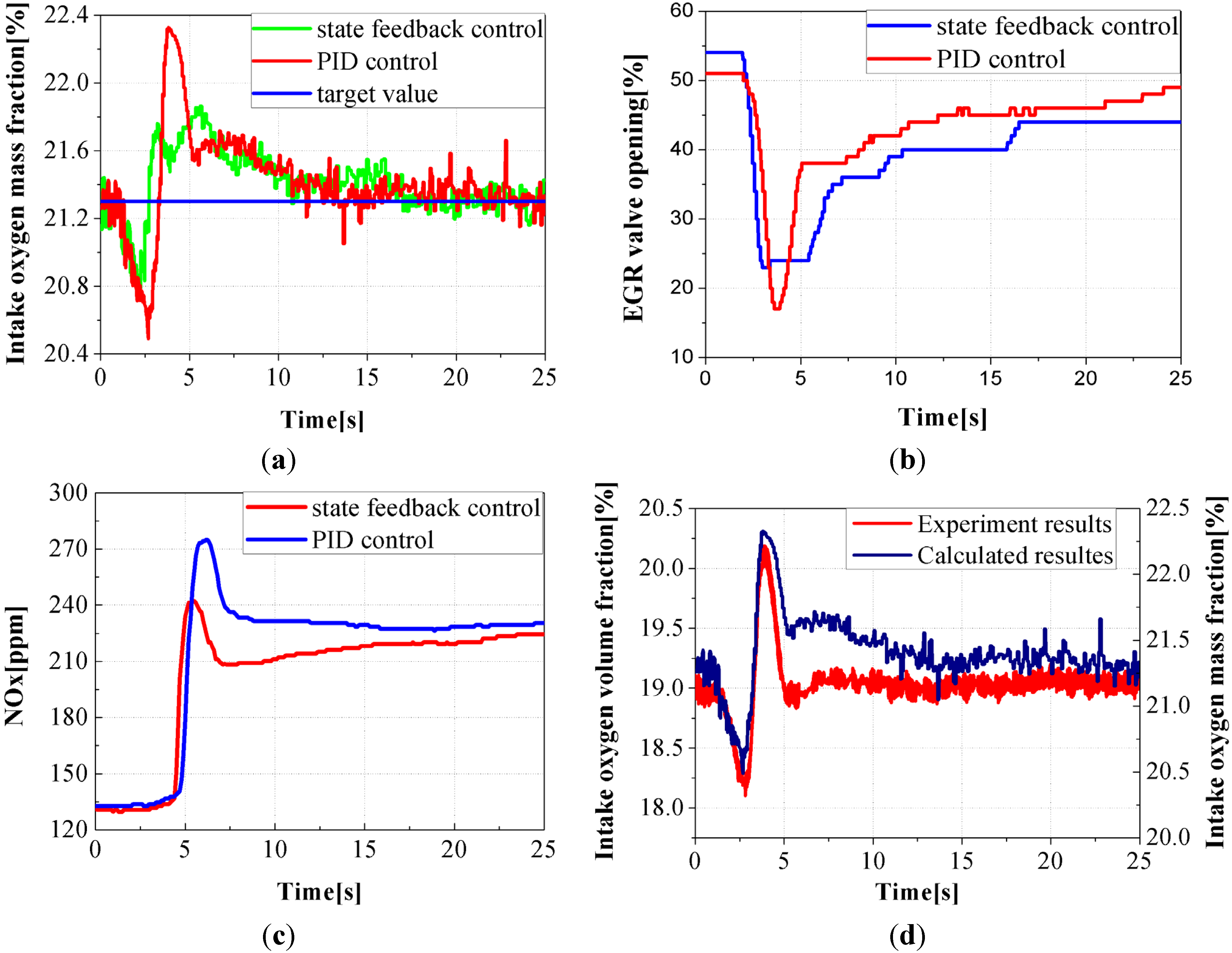
(1) The diesel engine operates at a constant speed of 1500 r/min, the power is increased from 10% to 35% in 1 s, the loading duration time is 3 s. In this process, the control system adjusts the EGR valve opening to maintain a constant intake oxygen mass fraction, with a target of 21.3%. Two different control algorithms, state feedback control and PID control, are applied in the control system, and all the control parameters have been optimized.
Figure 11 shows the response curves of the two control algorithms. From the changes of the intake oxygen mass fraction and the EGR valve opening, it can be seen that the control precision of the two kinds of control strategies are very similar, but the state feedback controller can provide a faster dynamic response and less overshoot than the PID controller.
Figure 11c is the response of the NO
x emissions. The NO
x emissions under the control of the state feedback controller not only can give a smaller overshoot than under the PID controller, but also result in a lower emission level. Therefore, the state feedback controller is much better than the PID controller in both the control process and the control effect.
Figure 11d is the comparison of the calculated intake oxygen mass fraction value and the measured intake oxygen volume fraction value in the PID controller control process. From the figure it can be seen that the two parameters not only have the same change trend, but also have a linear relationship.
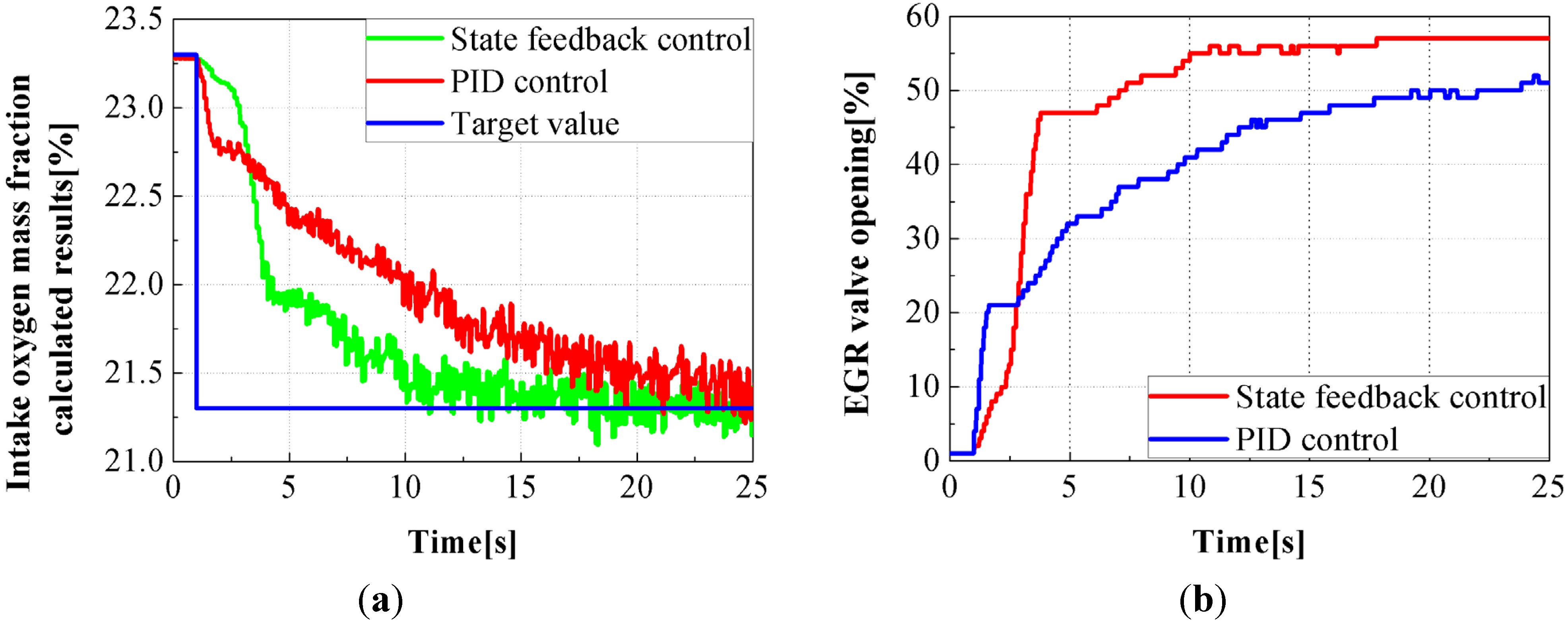
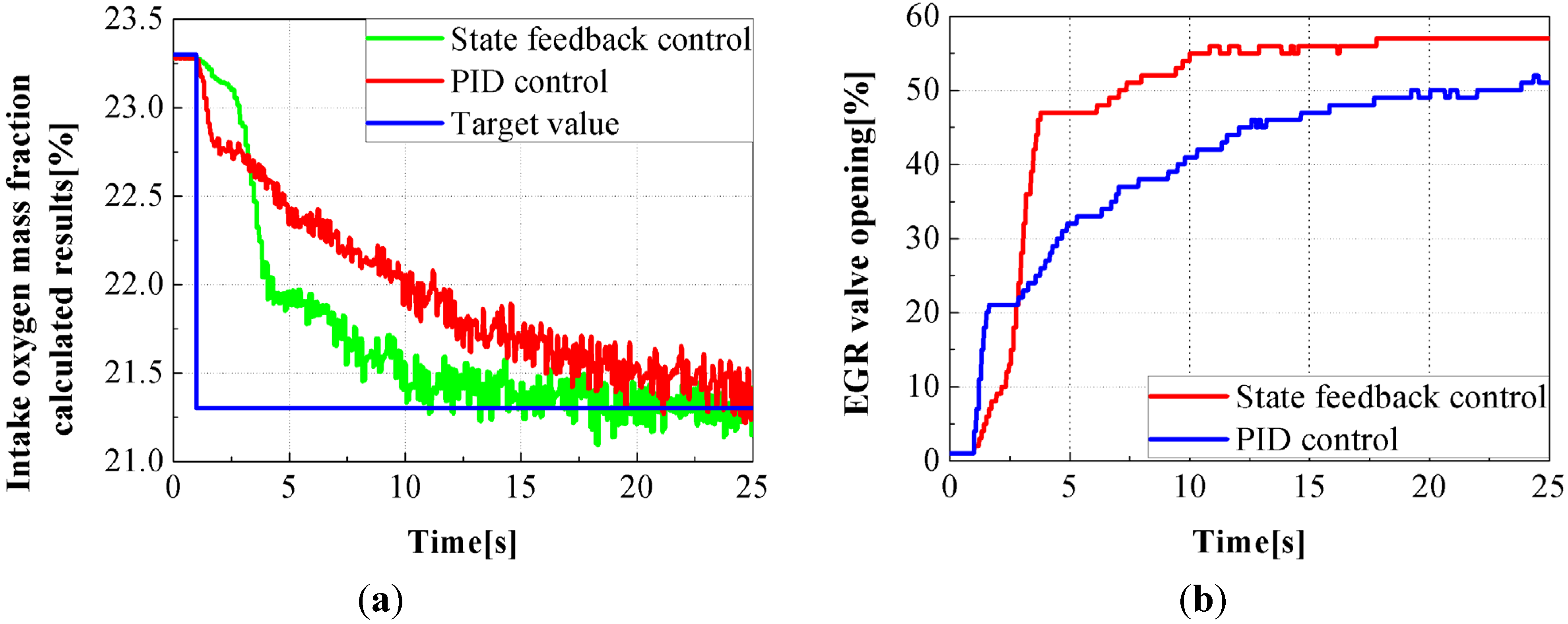
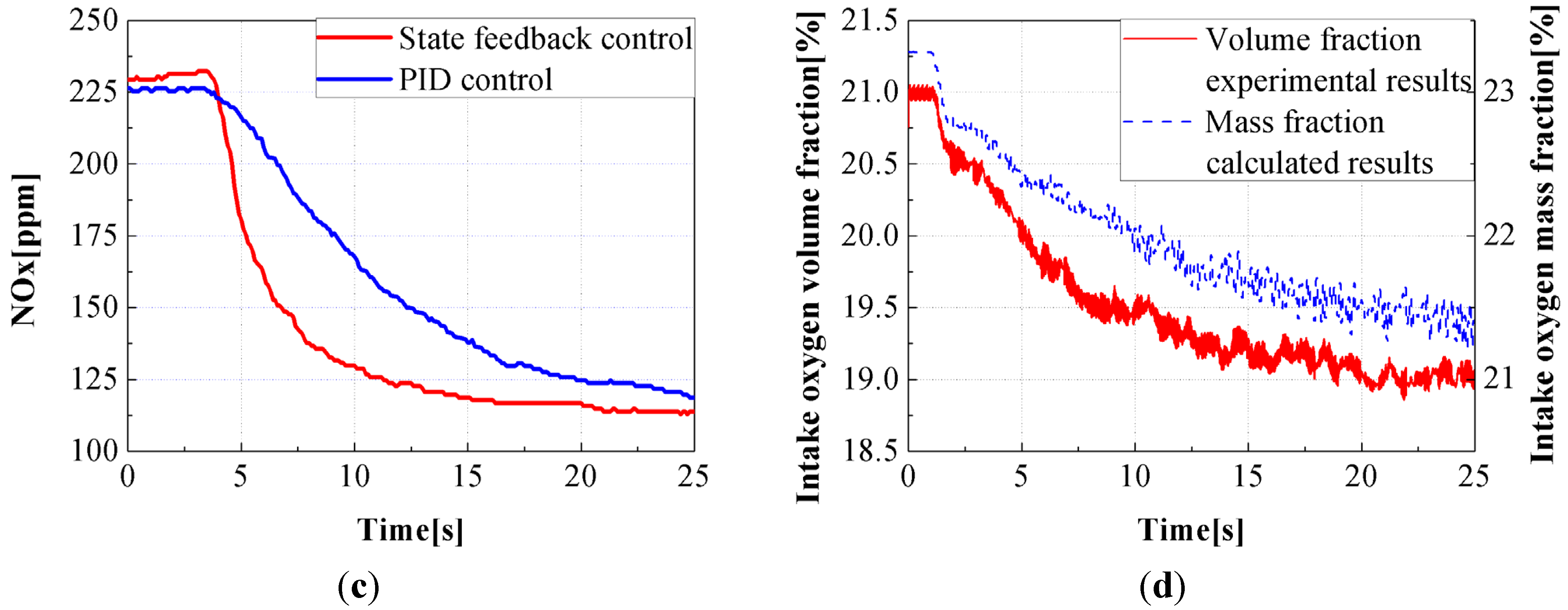
(2) The diesel engine operates at 1500 r/min, 25% load, the target intake oxygen mass fraction has a step change from 23.3% to 21.3% in 1 s. Two different control algorithms, state feedback control and PID control, are used in the control system, in order to contrast the responses of the two control algorithms.
Figure 12 shows the step response of the control algorithm under steady operating conditions. It can be seen from the change trends of the intake oxygen mass fraction and the EGR valve opening that the two algorithms both can achieve accurate tracking of the target value and no overshoot, but the state feedback controller has a shorter adjustment time. The shorter the adjustment time, the quicker the change of the NO
x emissions and the lower the NO
x emissions in the whole control process. Therefore, the control performance of the state feedback controller is better than the PID controller with the step input.
Figure 12d is the curve of the calculated value of the intake oxygen mass fraction and the measurement value of the intake oxygen volume fraction under the adjustment of the PID controller. It shows that the calculated value can accurately track the actual value with the step input.
Figure 11.
Comparison of the two kinds of control algorithm under constant speed loading conditions: (a) Intake oxygen mass fraction; (b) EGR valve opening; (c) NOx; (d) intake oxygen volume fraction and intake oxygen mass fraction.
Figure 11.
Comparison of the two kinds of control algorithm under constant speed loading conditions: (a) Intake oxygen mass fraction; (b) EGR valve opening; (c) NOx; (d) intake oxygen volume fraction and intake oxygen mass fraction.
Figure 12.
Comparison of the two kinds of control algorithm under steady state conditions: (a) Intake oxygen mass fraction calculated results; (b) EGR valve opening; (c) NOx; (d) comparison.
Figure 12.
Comparison of the two kinds of control algorithm under steady state conditions: (a) Intake oxygen mass fraction calculated results; (b) EGR valve opening; (c) NOx; (d) comparison.
6. Conclusions and Future Work
In this paper, a novel approach to control a diesel engine EGR system has been proposed. This approach is based on the theory of state feedback control. The state space model was established and validated against a GT-Power model. A state feedback controller based on the intake oxygen mass fraction was designed and the formula of the intake oxygen mass fraction was developed. The designed state feedback controller was validated by the simulation and experimental results. The following conclusions are obtained:
- (1)
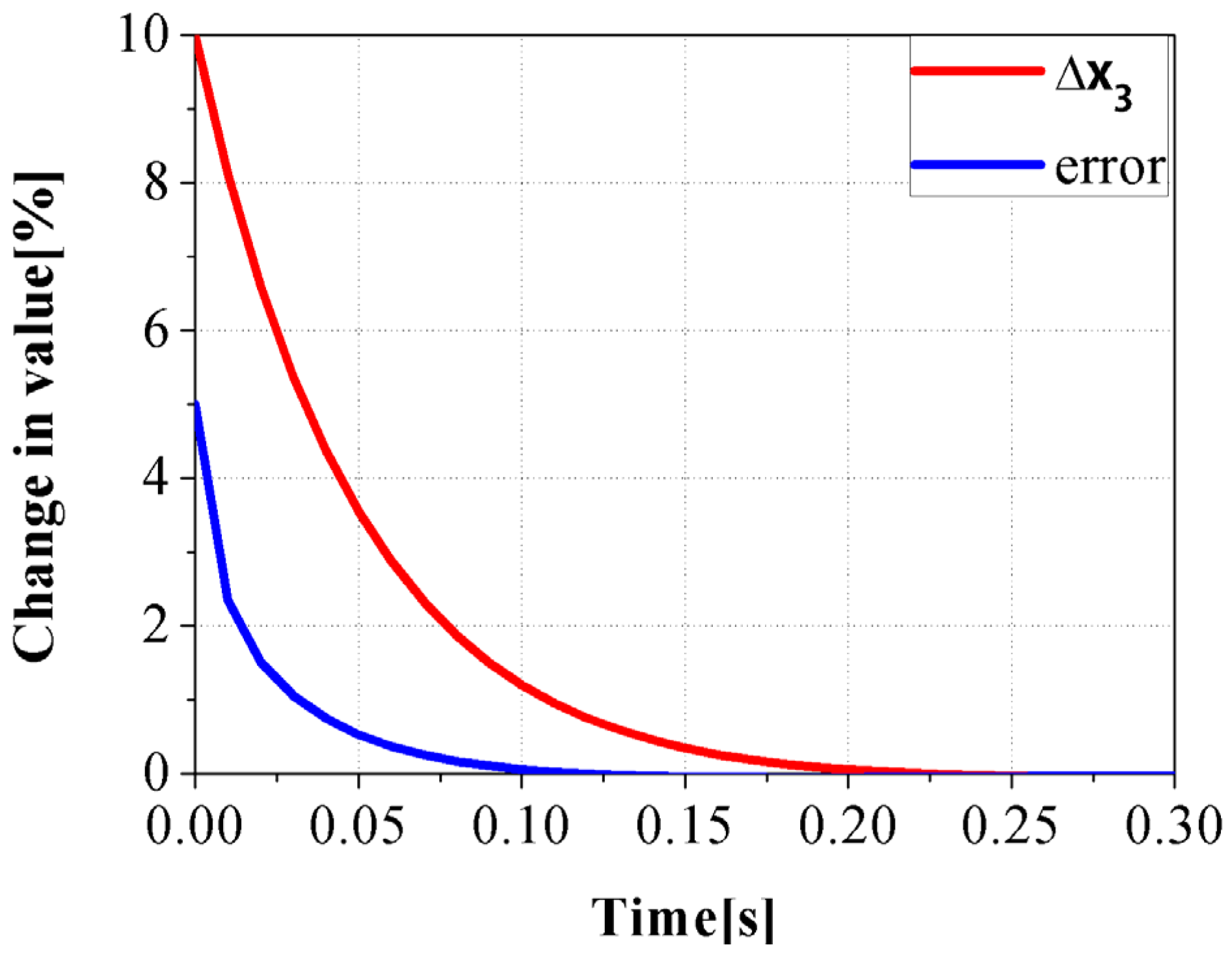
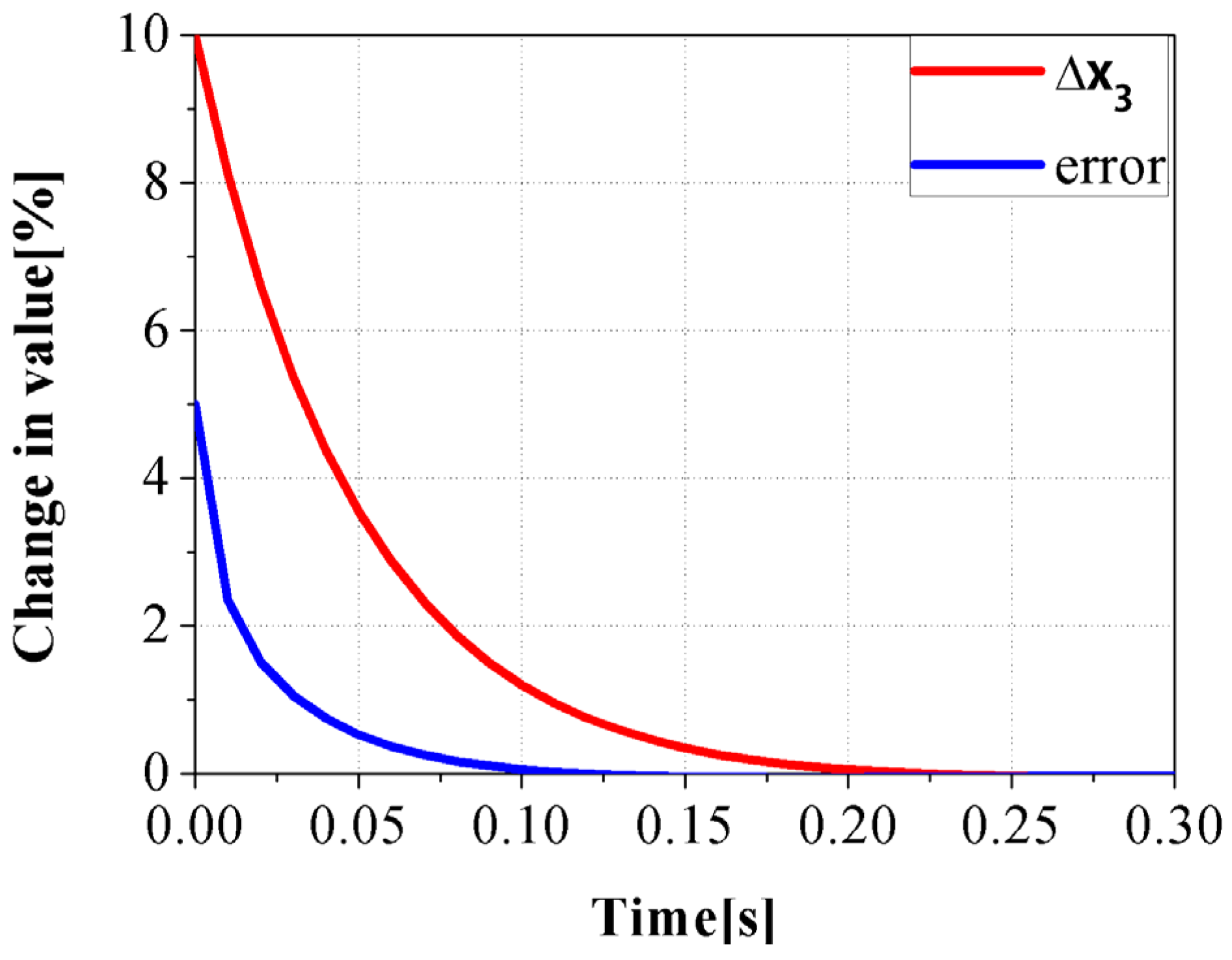
The calculated results of the state space model showed a ±7% difference from the simulation results from the calibrated GT-power model, which means that the designed state space model can accurately describe the dynamic characteristics of the system.
- (2)
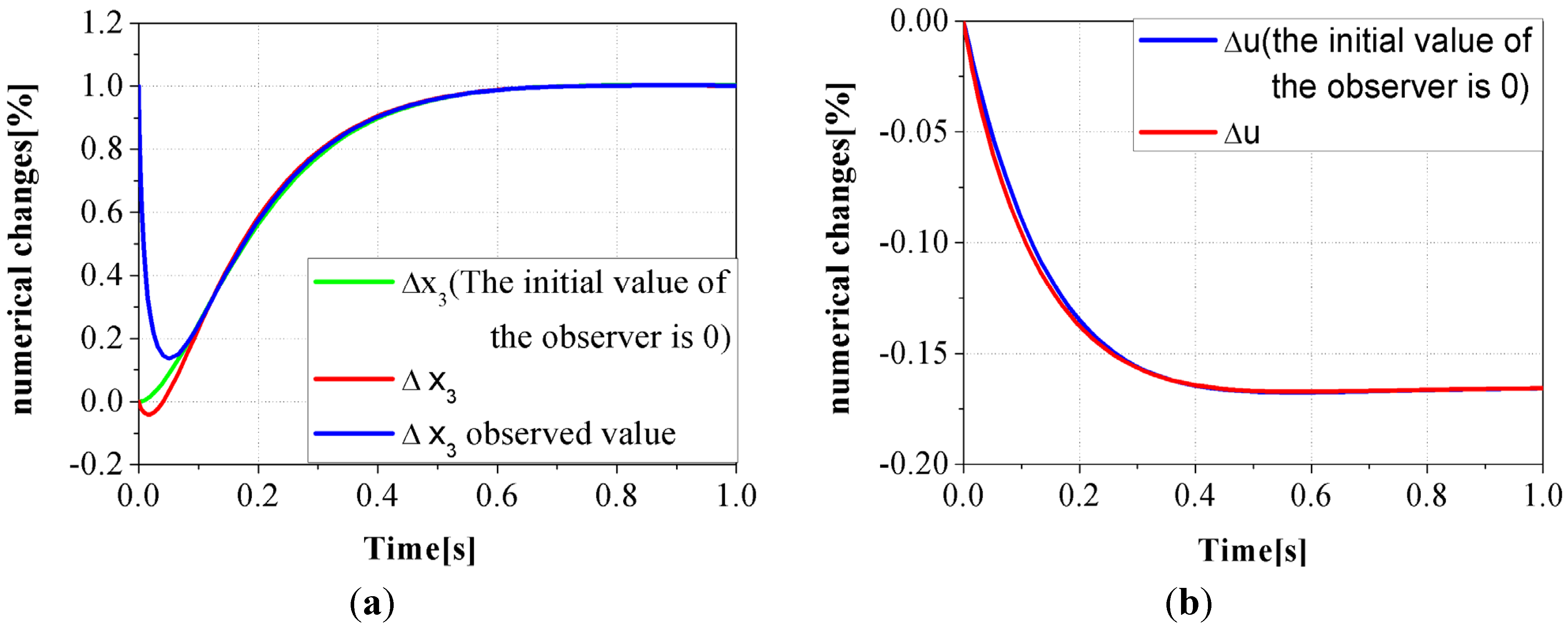
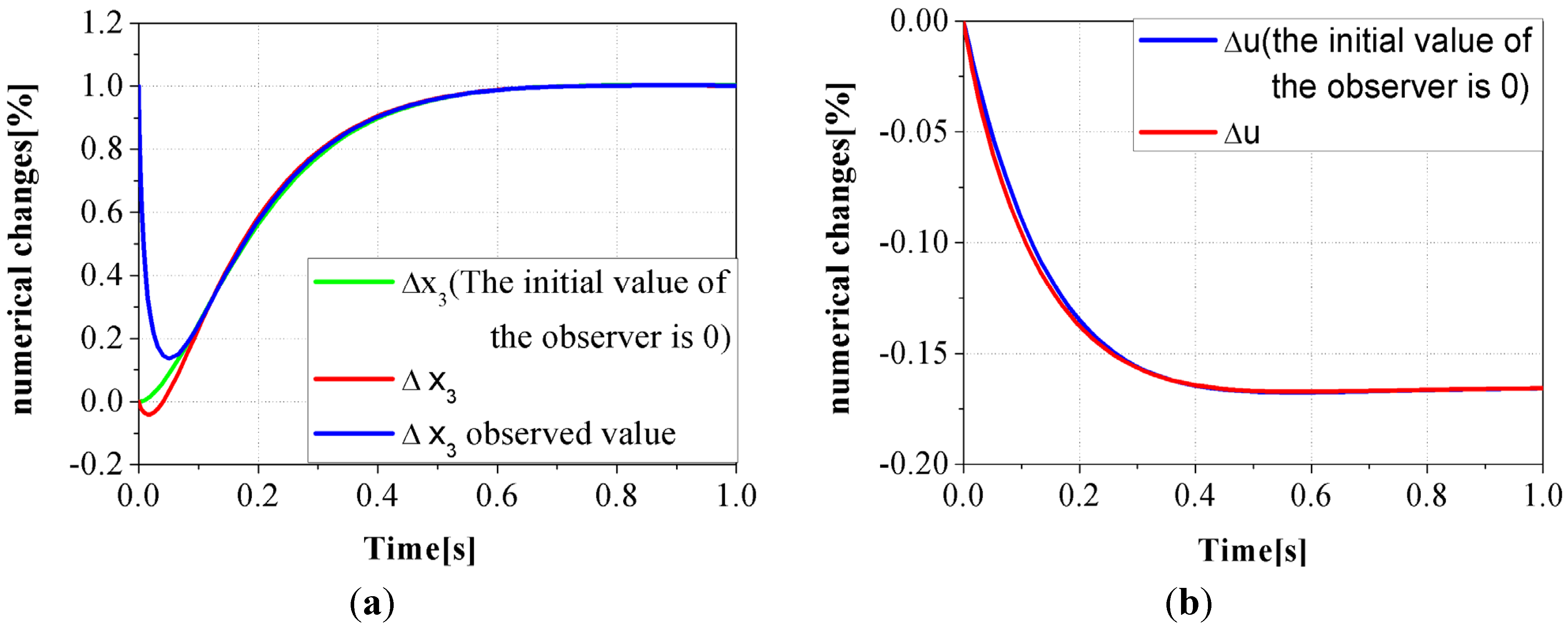
The intake oxygen mass fraction is a function of EGR rate and the excess air coefficient. This conclusion was verified by the simulation results. The calculated results showed a ±0.5% evaluated error, which means that the estimation method proposed in this paper can be used to accurately estimate the intake oxygen mass fraction.
- (3)
It can be seen from the experimental results that compared to the PID controller, the state feedback controller proposed in this paper can achieve a more rapid dynamic response and smaller overshoots in transient control. The designed EGR control system can meet well the control requirements of diesel engine EGR systems in steady and transient conditions.
The state feedback controller of the EGR system has been developed and validated in this paper. Because the state space model is based on a high pressure EGR and fixed geometry turbine, the controller is suitable for turbocharged diesel engines fitted with high pressure EGR systems and fixed geometry turbine, not VGT. In future work, the method described in this paper will be used to design a controller for engines fitted with VGT and/or LP EGR systems. In addition, this controller will be further verified under different operating conditions. The impact of all other variations of operating conditions on the performance of the controller and the control methods will also be investigated in future efforts.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}