
Adaptive Disturbance Observer-Based Parameter-Independent Speed Control of an Uncertain Permanent Magnet Synchronous Machine for Wind Power Generation Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. PMSG Model in a Rotating d-q Frame
3. Controller Design
3.1. Parameter-Independent Current Controller Design and Stability Analysis
3.2. ADOB Design for Time Delay Compensation
3.3. Speed Controller Design in the Outer Loop
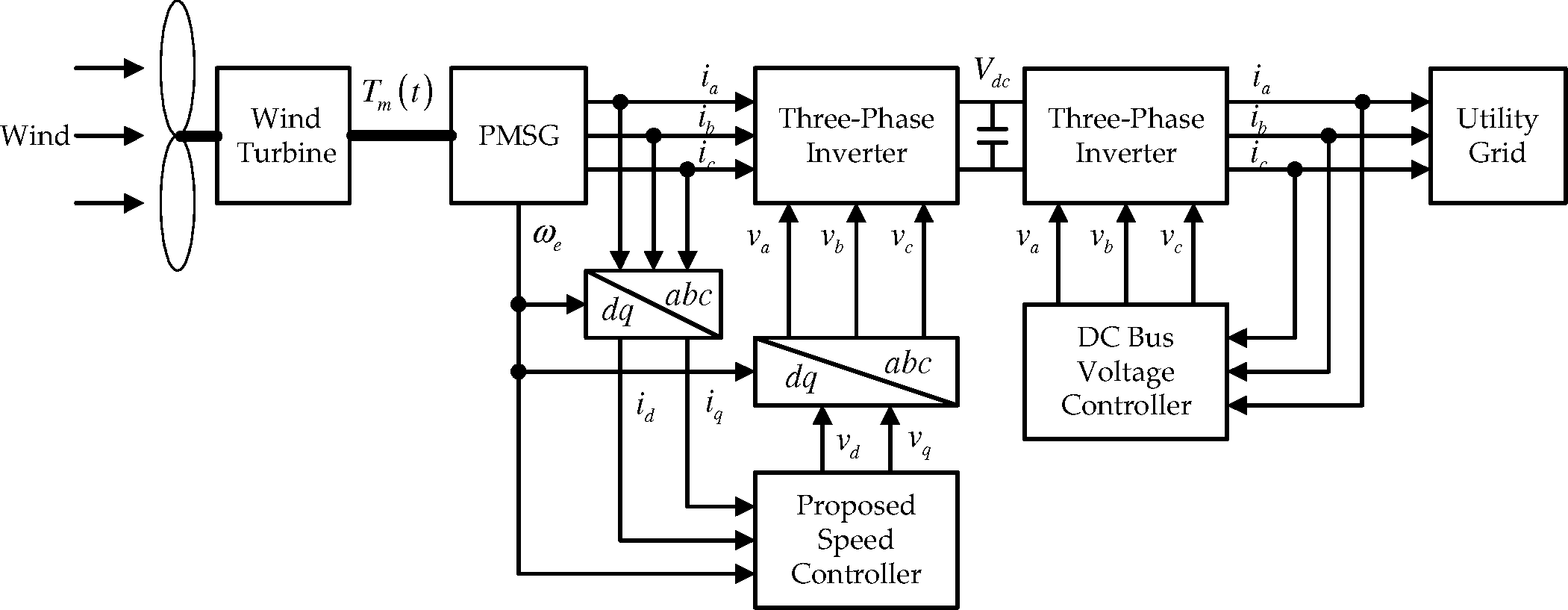
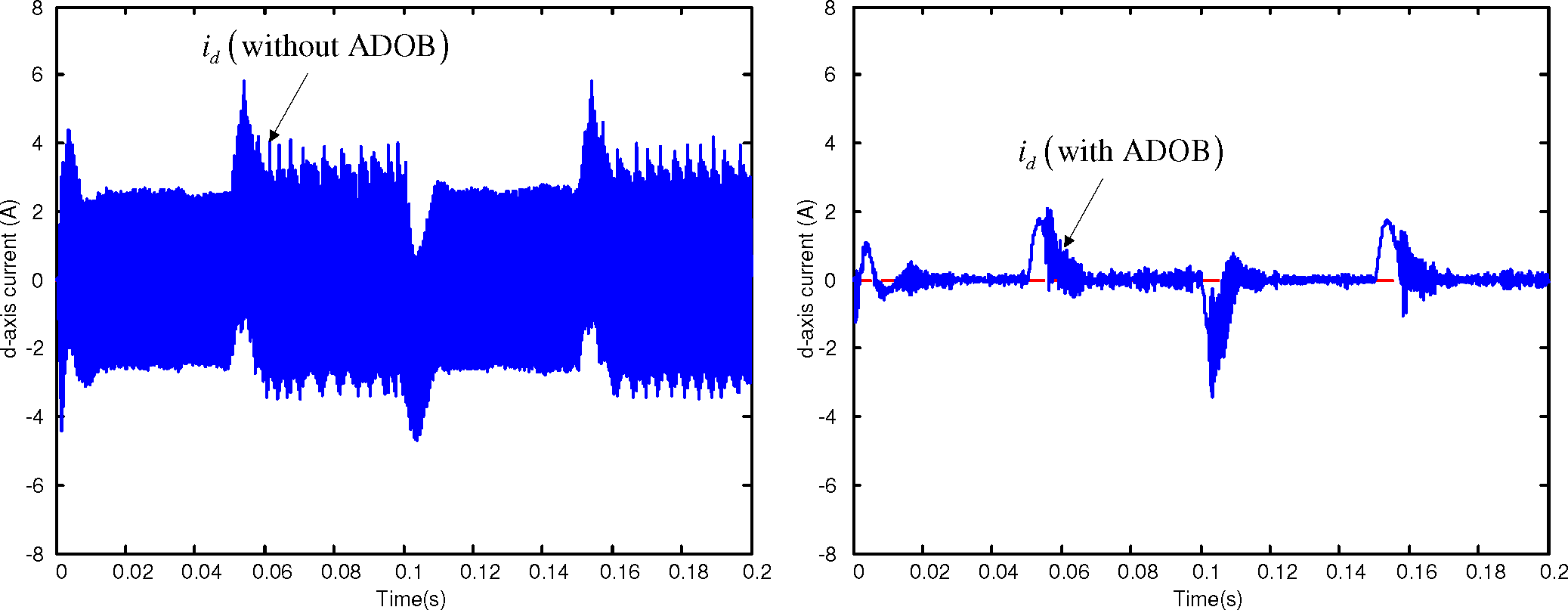
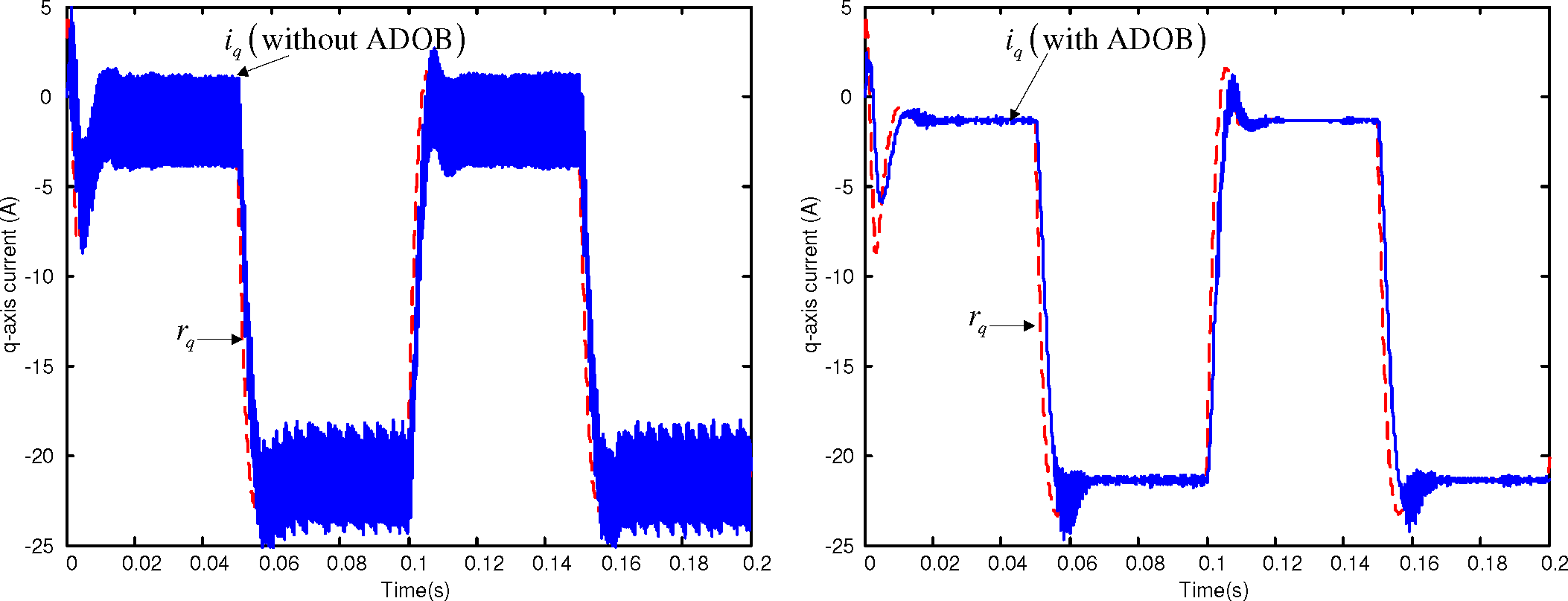
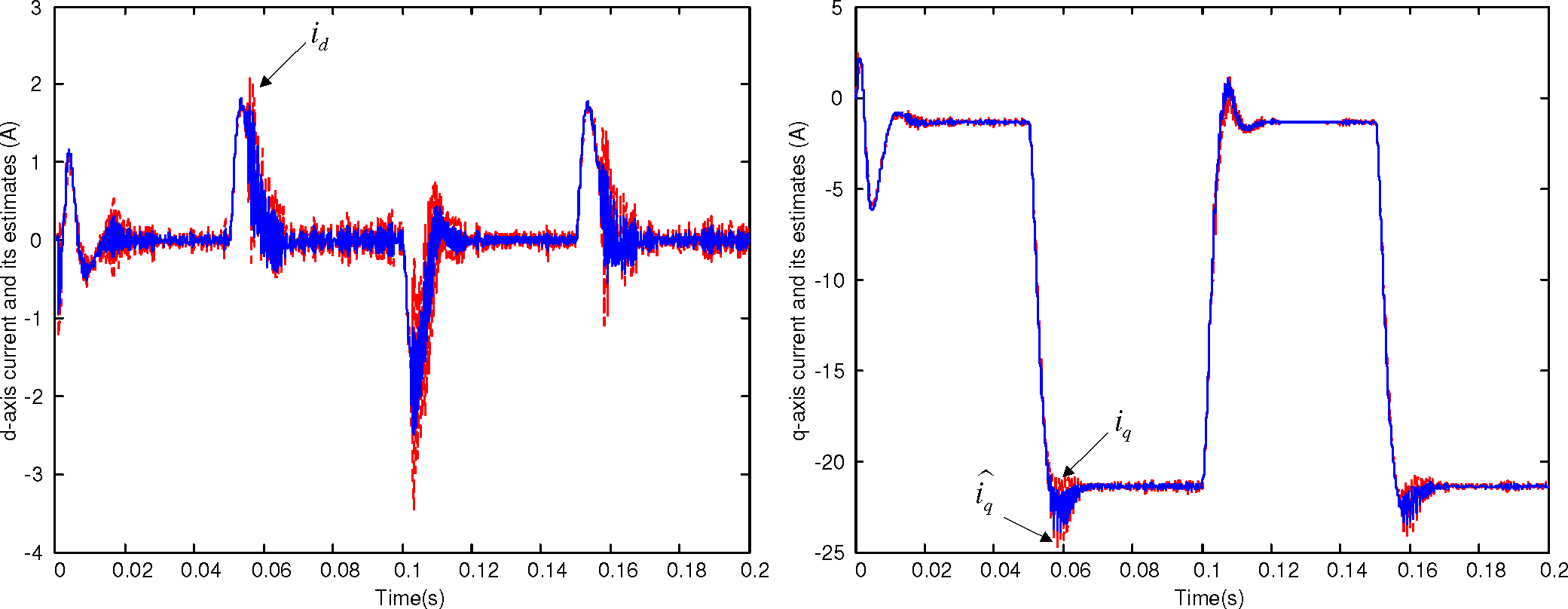
4. Simulations
- Connect a constant speed load to the PMSG for fixing the speed using the secondary inverter, and set all control gains to zero.
- Choose the inner-loop proportional gain matrix , such that the d-q frame current tends to a value as quickly as possible without overshoot.
- Choose the inner-loop integral gain matrix , such that the d-q frame’s current converges as quickly as possible to its reference value without overshooting it.
- Remove the constant-speed load connected to the PMSG.
- Choose the outer-loop proportional gain kP, such that the speed approaches its reference value as soon as possible without overshooting it.
- Choose the outer-loop integral gain kI, such that the speed converges to its reference value as quickly as possible without overshooting it.
5. Conclusions
Appendix
A. Proofs of Theorems
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhong, L.; Rahman, M.; Hu, W.; Lim, K. Analysis of direct torque control in permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 1997, 12, 528–536. [Google Scholar]
- Andeescu, G.D.; Pitic, C.; Blaabjerg, F.; Boldea, I. Combined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of IPMSM drives. IEEE Trans. Energy Convers. 2008, 23, 393–402. [Google Scholar]
- Tang, L.; Zhong, L.; Rahman, M.; Hu, Y. A novel direct torque control for interior permanent-magnet synchronous machine drive with low ripple in torque and flux–A speed-senseroless approach. IEEE Trans. Ind. Appl. 2003, 39, 1748–1756. [Google Scholar]
- Boldea, I.; Blaabjerg, F. Direct torque control via feedback linearization for permanent magnet synchronous motor drives, Proceedings of the 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 22–24 May 2012.
- Fazeli, S.; Zarchi, H.; Soltani, J.; Ping, H. Adaptive sliding mode speed control of surface permanent magnet synchronous motor using input output feedback linearization, Proceedings of the ICEMS, Wuhan, China, 17–20 October 2008.
- Bae, B.H.; Sul, S.K.; Kwon, J.H.; Byeon, J.S. Implementation of sensorless vector control for super high speed PMSM of turbo compressor. IEEE Trans. Ind. Appl. 2003, 39, 811–818. [Google Scholar]
- Zhou, J.; Wang, Y. Real-time nonlinear adaptive backstepping speed control for a PM synchronous motor. Control Eng. Pract. 2005, 13, 1259–1269. [Google Scholar]
- Goudarzi, N.; Zhu, W. A review on the development of wind turbine generators across the world. Int. J. Dyn. Control. 2013, 1, 192–202. [Google Scholar]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S. Analysis of Electric Machinery; IEEE Press: Baltimore, MD, USA, 1995. [Google Scholar]
- Lascu, C.; Boldea, I.; Blaabjerg, F. Direct torque control of sensorless induction motor drives: A sliding-mode approach. IEEE Trans. Ind. Appl. 2004, 40, 582–590. [Google Scholar]
- Lee, J.; Choi, C.; Seok, J.; Lorenz, R. Deadbeat direct torque control and flux control of interior PMSM with discrete time stator current and stator flux linkage observer. IEEE Trans. Ind. Appl. 2011, 47, 1749–1758. [Google Scholar]
- Mino-Aguilar, G.; Dominguez, A.M.; Maya, R.; Alvarez, R.; Cortez, L.; Munoz, G.; Guerrero, F.; Maya, S.; Rodriguez, A.M.; Portillo, F.; et al. A Direct torque control for a PMSM, Proceedings of the 20th Electronics, Communications and Computer (CONIELECOMP) 2010, Cholula, Mexico, 22–24 February 2010.
- Rodriguez, J.; Cortes, P. Predictive control of permanent magnet synchronous motors. Predict. Control. Power Convert. Electr. Drives 2012, 59, 125–138. [Google Scholar]
- Lee, T.S. Input-output linearization and zero-dynamics control of three-phase AC/DC voltage-source converters. IEEE Trans. Power Electron. 2003, 18, 11–22. [Google Scholar]
- Lee, T.S. Lagrangian modeling and passivity-based control of three-phase AC/DC voltage-source converters. IEEE Trans. Ind. Electron. 2004, 51, 892–902. [Google Scholar]
- Kadjoudj, M.; Benbouzid, M.E.H.; Ghennai, C.; Diallo, D. A robust hybrid current control for permanent magnet synchronous motor drive. IEEE Trans. Energy Convers. 2004, 19, 109–115. [Google Scholar]
- Ke, S.S.; Lin, J.S. Sensorless speed tracking control with backstepping design scheme for permanent magnet synchronous motors, Proceedings of the 2005 IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005.
- Mathew, S. Wind Energy: Fundamentals, Resource Analysis and Economics; Springer: New York, NY, USA, 2006. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]




© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-K.; Song, H.; Lee, J.-H. Adaptive Disturbance Observer-Based Parameter-Independent Speed Control of an Uncertain Permanent Magnet Synchronous Machine for Wind Power Generation Applications. Energies 2015, 8, 4496-4512. https://doi.org/10.3390/en8054496
Kim S-K, Song H, Lee J-H. Adaptive Disturbance Observer-Based Parameter-Independent Speed Control of an Uncertain Permanent Magnet Synchronous Machine for Wind Power Generation Applications. Energies. 2015; 8(5):4496-4512. https://doi.org/10.3390/en8054496
Chicago/Turabian StyleKim, Seok-Kyoon, Hwachang Song, and Jang-Ho Lee. 2015. "Adaptive Disturbance Observer-Based Parameter-Independent Speed Control of an Uncertain Permanent Magnet Synchronous Machine for Wind Power Generation Applications" Energies 8, no. 5: 4496-4512. https://doi.org/10.3390/en8054496