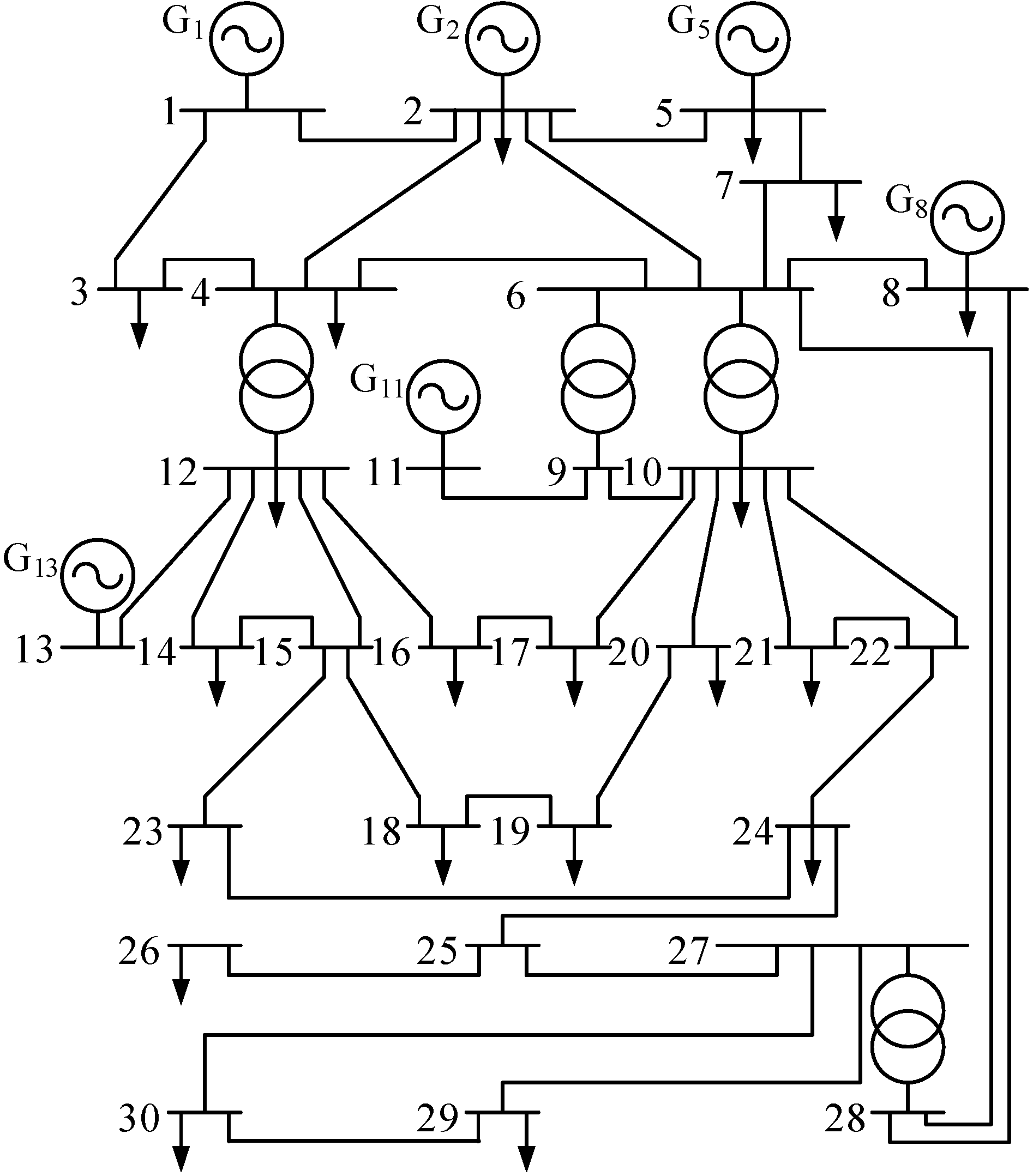
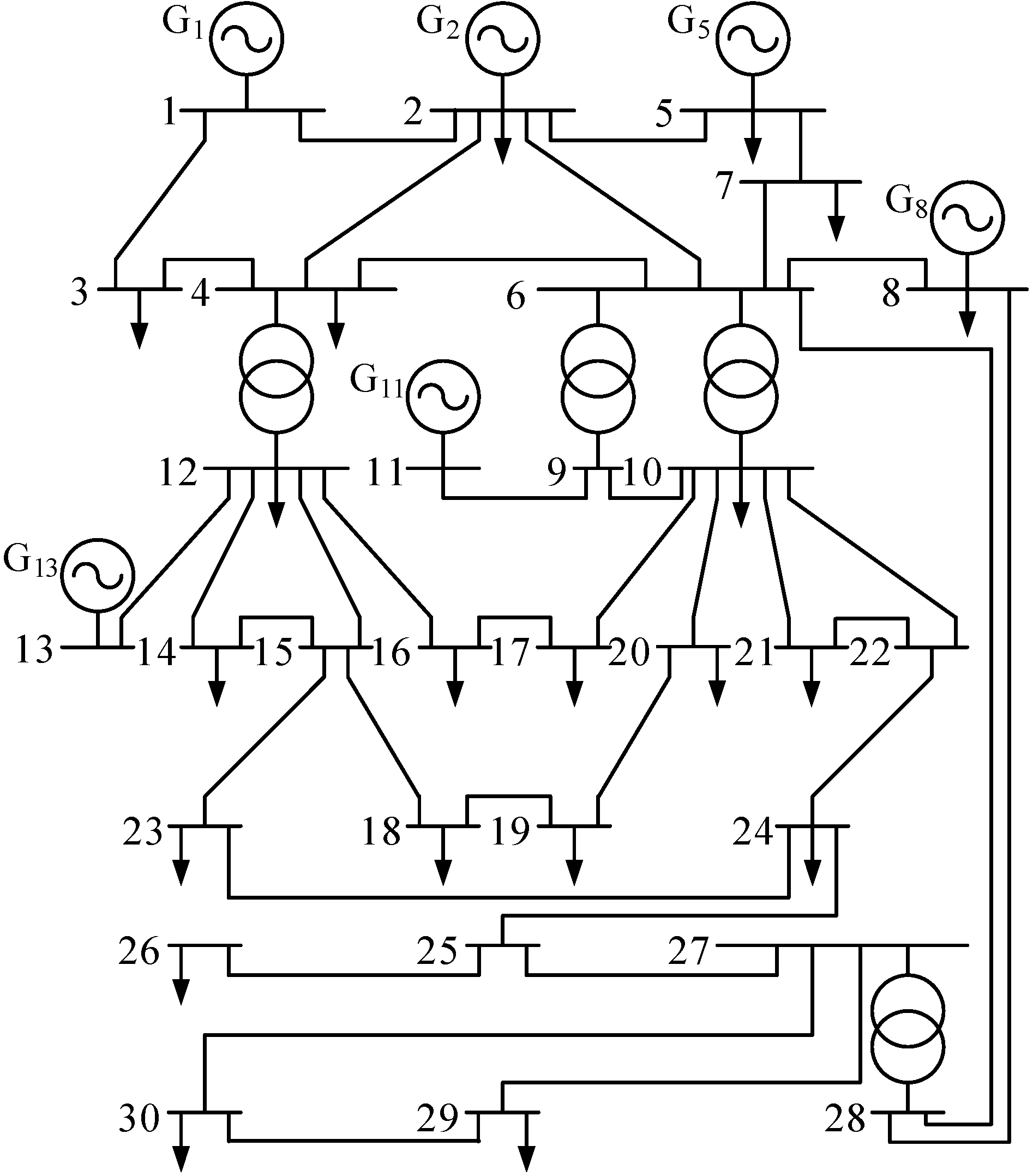
The IEEE 30-bus test system is utilized to test the proposed method. Its total system demand is 283.4 MW for active power and 126.2 MVAR for reactive power. It has six generators, four transformers and nine shunt VAR compensation devices, and has a total of twenty-four control variables for OPF. The limits of the generator buses are 0.95–1.1 p.u., and the transformer-tap settings are assumed to vary in the range [0.9, 1.1] p.u., with step size of 0.0125 p.u. The VAR injections of the shunt capacitors are assumed to vary in the range [0, 5] MVAR, with step size of 1 MVAR. The limits of load buses are 0.95–1.05 p.u., Bus 1 is taken as slack bus. The other control parameters are shown in [
12]. The single line diagram of the system is shown in
Figure 3.
Figure 3.
Single line diagram of the IEEE 30-bus test system.
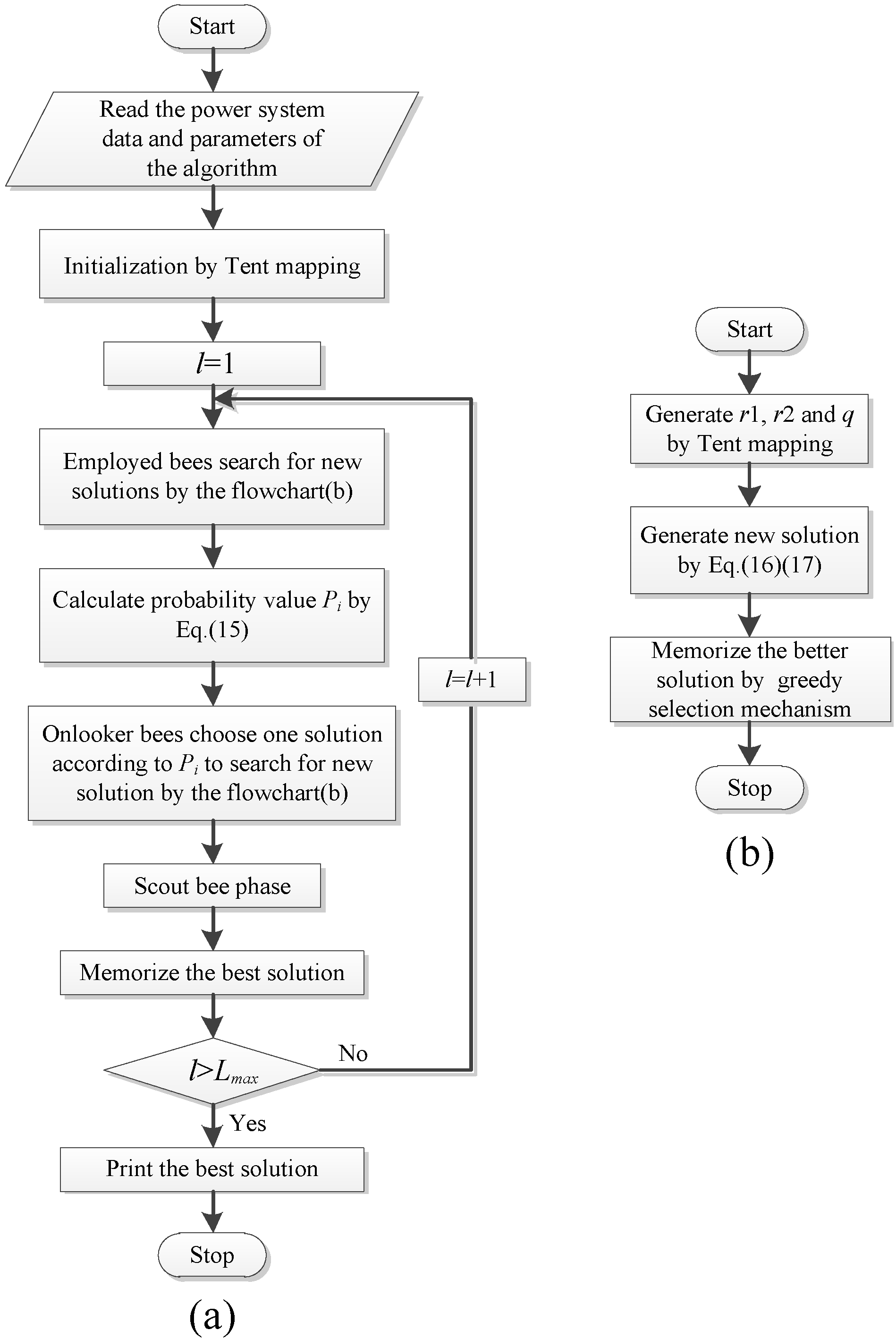
6.1.1. Convergence Characteristic Analysis
Heuristic optimization algorithms are sensitive to the selection of the control parameters. The IABC algorithm parameters include
Ns,
Lmax,
limit,
F1,
F2 and
CR. In order to verify the stability of the proposed IABC algorithm to perturbations of the parameter values, we have simulated different cases with different parameter values in the OPF problem whose optimization objective is the minimization of the fuel cost for the IEEE 30-bus test system. The parameters
F1,
F2 and
CR are introduced in reference [
30], and their best values are
F1 =
F2 = 0.6 and
CR = 0.5, respectively.
Case 1: limit = 30 and Lmax = 200
In this case, the
limit and
Lmax values are equal to 30 and 200, respectively. The convergence characteristics are analysed for different values of the parameter
Ns.
Table 1 shows the minimum (Min), average, maximum (Max), and standard deviation (SD) values of fuel cost and average running time obtained by the IABC algorithm with different values of the
Ns parameter over 20 independent runs.
Table 1.
Results obtained by the IABC algorithm with different Ns values for OPF with total fuel cost.
Table 1.
Results obtained by the IABC algorithm with different Ns values for OPF with total fuel cost.
| Ns | Fuel cost ($/h) | Time (s) |
|---|
| Min | Average | Max | SD |
|---|
| 20 | 800.4320 | 800.4581 | 800.5103 | 0.0240 | 11.8249 |
| 40 | 800.4296 | 800.4494 | 800.4888 | 0.0159 | 23.3254 |
| 50 | 800.4259 | 800.4398 | 800.4637 | 0.0096 | 29.8517 |
| 60 | 800.4244 | 800.4383 | 800.4601 | 0.0090 | 34.6824 |
| 80 | 800.4228 | 800.4382 | 800.4590 | 0.0082 | 46.7110 |
| 100 | 800.4215 | 800.4359 | 800.4520 | 0.0081 | 56.3808 |
| 150 | 800.4212 | 800.4289 | 800.4499 | 0.0070 | 84.4469 |
| 200 | 800.4194 | 800.4273 | 800.4437 | 0.0066 | 111.512 |
From
Table 1, it can be seen that the greater the parameter
Ns value selected, the smaller the minimum, average and maximum values obtained by the IABC algorithm are, and the longer the running time taken is. The results demonstrate the optimal value changes with different
Ns values of the IABC algorithm, and a better objective function value is obtained by the IABC algorithm when a greater
Ns value is utilized.
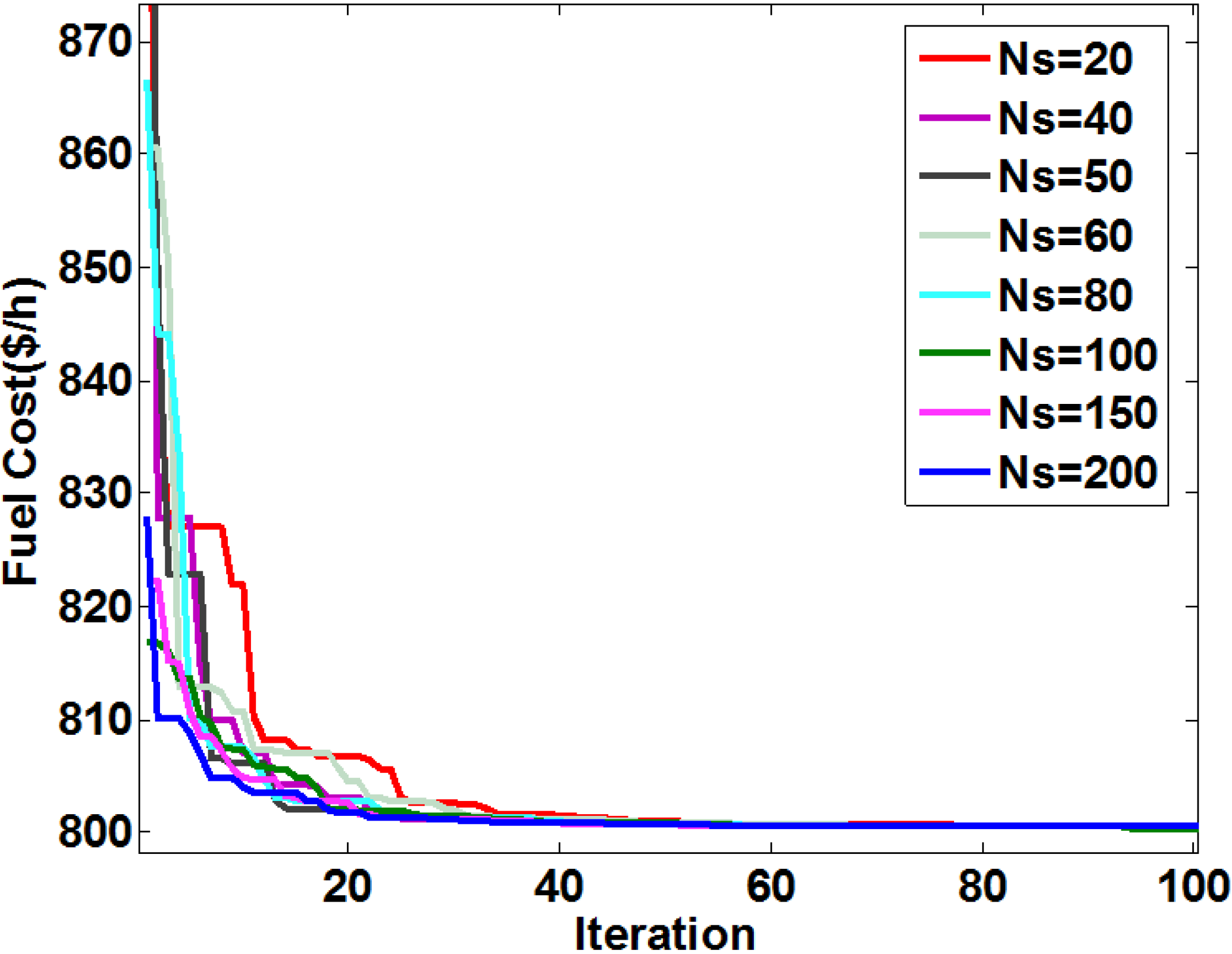
The convergence characteristics of searching for minimum value by IABC algorithm with different parameter
Ns values are shown in
Figure 4, show which it can be seen that the IABC algorithm is able to converge fast to the corresponding minimum value under the conditions of different parameter settings. The results verify the stability of the IABC algorithm to perturbations of the parameter
Ns values.
Figure 4.
Convergence characteristics obtained by the IABC algorithms with different values of the parameter Ns for OPF with total fuel cost.
Figure 4.
Convergence characteristics obtained by the IABC algorithms with different values of the parameter Ns for OPF with total fuel cost.
Case 2: Ns = 100 and Lmax = 200
In this case, the convergence characteristics of the IABC algorithm with different
limit parameter values are analyzed.
Table 2 shows the minimum, average, maximum, standard deviation values and average running time obtained by the IABC algorithm with different
limit parameter values over 20 independent runs.
Table 2.
Results obtained by the IABC algorithm with different limit values for OPF with total fuel cost.
Table 2.
Results obtained by the IABC algorithm with different limit values for OPF with total fuel cost.
| Limit | Fuel cost ($/h) | Time (s) |
|---|
| Min | Average | Max | SD |
|---|
| 10 | 800.4530 | 800.4818 | 800.5042 | 0.0119 | 56.7482 |
| 20 | 800.4376 | 800.4561 | 800.4802 | 0.0111 | 58.1910 |
| 30 | 800.4215 | 800.4359 | 800.4520 | 0.0081 | 56.3808 |
| 40 | 800.4168 | 800.4291 | 800.4372 | 0.0063 | 56.5577 |
| 50 | 800.4094 | 800.4200 | 800.4364 | 0.0060 | 56.4471 |
From
Table 2, it can be seen that IABC algorithm with different
limit values converges to different optimal values, and the better solution can be obtained with the greater
limit parameter value. It also can be seen that the average running time is almost unchanged with the different
limit parameter values.
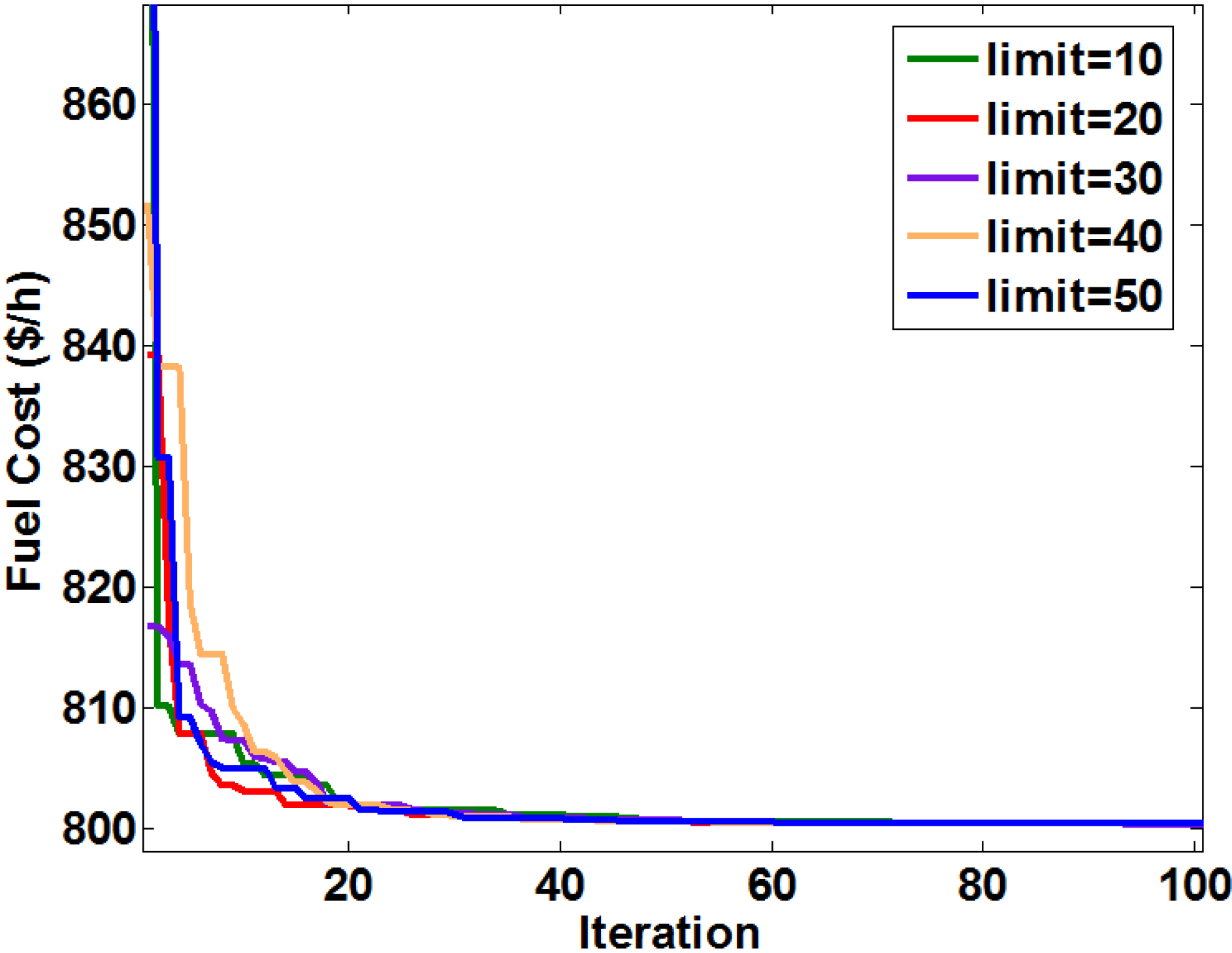
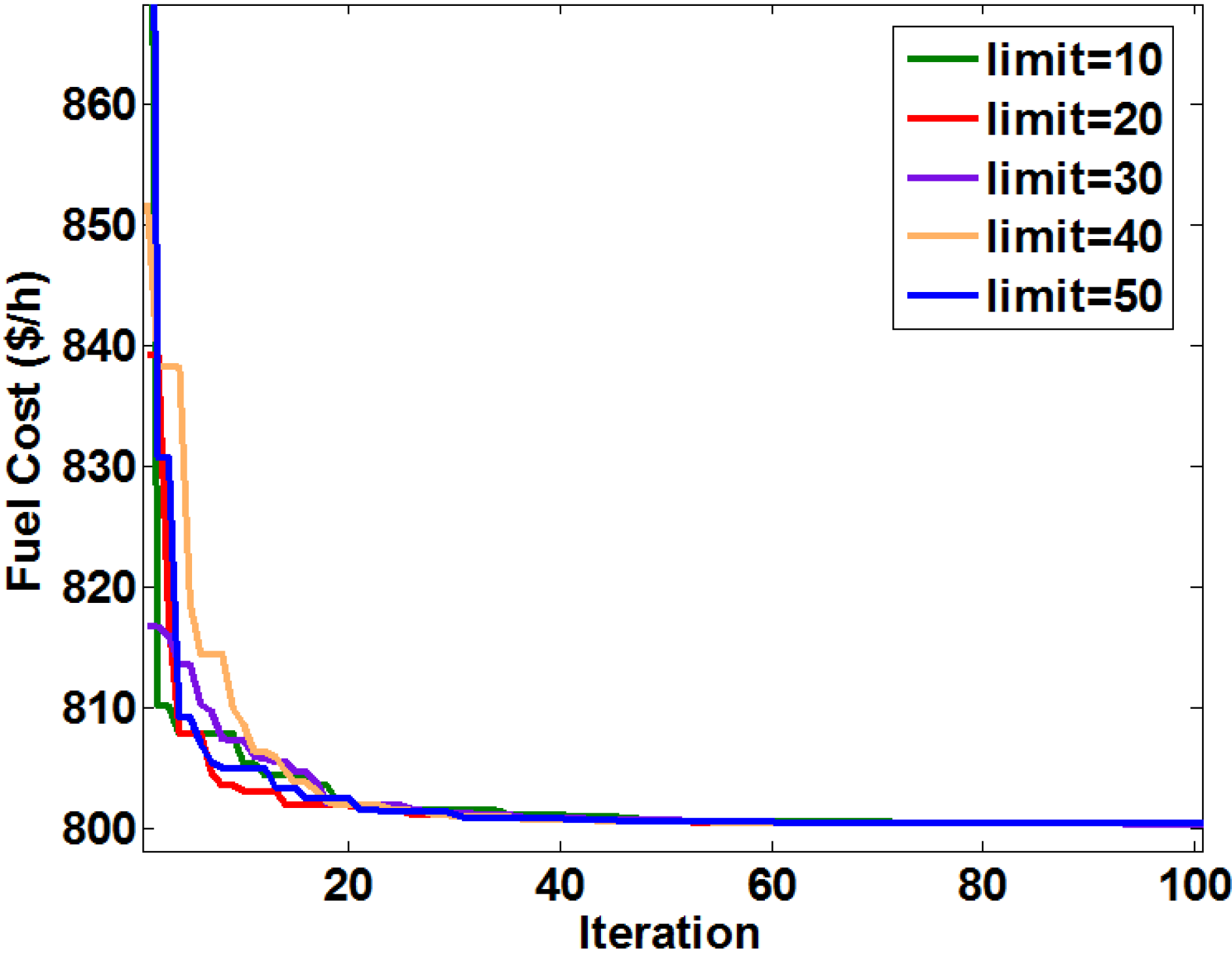
The convergence characteristics of searching for minimum value by IABC algorithm with different
limit parameter values are shown in
Figure 5, which illustrates that the proposed algorithm with different
limit parameter values can quickly and stably converge to the corresponding optimal values. The results demonstrate the stability of the IABC algorithm to perturbations of the
limit parameter values.
Figure 5.
Convergence characteristics obtained by the IABC algorithm with different parameter limit values for OPF with total fuel cost.
Figure 5.
Convergence characteristics obtained by the IABC algorithm with different parameter limit values for OPF with total fuel cost.
Case 3: Ns = 100 and limit = 30
In this case, the purpose of simulation is to analyse the convergence characteristics of the IABC algorithm with different
Lmax parameter values. The minimum, average, maximum, standard values and average running time obtained by the IABC algorithm with different
Lmax parameter values after 20 independent runs are tabulated in
Table 3.
Table 3.
Results obtained by the IABC algorithm with different Lmax values for OPF with total fuel cost.
Table 3.
Results obtained by the IABC algorithm with different Lmax values for OPF with total fuel cost.
| Lmax | Fuel cost ($/h) | Time (s) |
|---|
| Min | Average | Max | SD |
|---|
| 50 | 800.5383 | 800.6626 | 800.8829 | 0.0860 | 15.8349 |
| 100 | 800.4284 | 800.4518 | 800.4779 | 0.0137 | 28.6818 |
| 150 | 800.4249 | 800.4439 | 800.4748 | 0.0121 | 42.4165 |
| 200 | 800.4215 | 800.4359 | 800.4520 | 0.0081 | 56.3808 |
| 250 | 800.4192 | 800.4295 | 800.4420 | 0.0080 | 70.8397 |
| 300 | 800.4177 | 800.4293 | 800.4409 | 0.0072 | 84.6042 |
As seen from
Table 3, the minimum, average, maximum and standard deviation values are better and better with the greater
Lmax parameter values, and the corresponding running time is longer and longer. The simulation data illustrate the IABC algorithm possesses stability convergence characteristic under the conditions of different
Lmax parameter values.
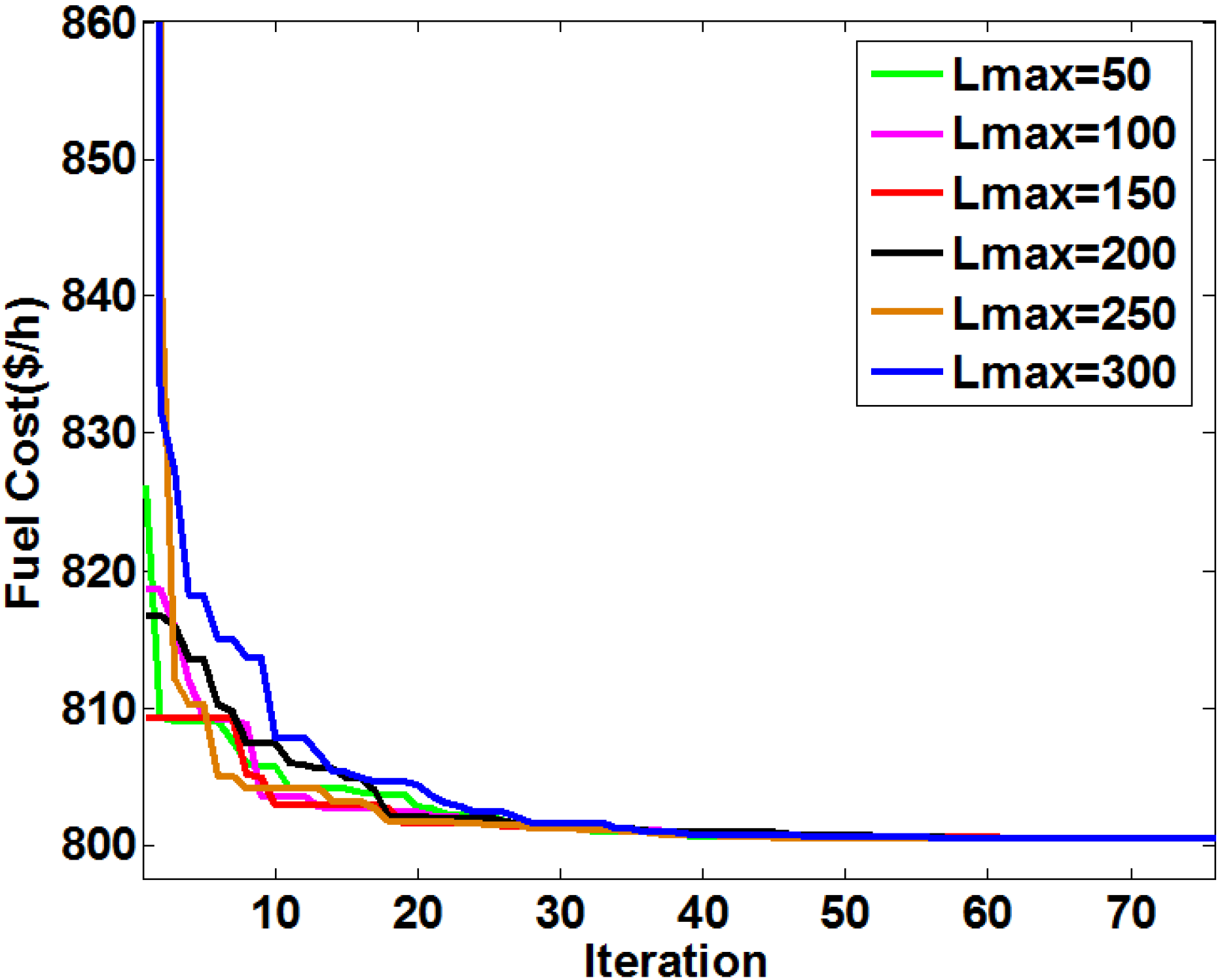
The convergence characteristics of searching for the minimum value by the IABC algorithm with different parameter
Lmax values are shown in
Figure 6, where the proposed IABC algorithm has stable behavior in obtaining the optimal values when different values of the
Lmax parameter are selected. The simulation verifies the stability of the IABC algorithm to perturbations of the
Lmax parameter value. Based on the above results of Case 1–Case 3, it can be illustrated that the proposed IABC algorithm possesses stable convergence characteristics and stability to perturbations of the control parameter values.
Figure 6.
Convergence characteristics obtained by the IABC algorithm with different Lmax parameter values for OPF with total fuel cost.
Figure 6.
Convergence characteristics obtained by the IABC algorithm with different Lmax parameter values for OPF with total fuel cost.
6.1.2. Single Objective OPF on IEEE 30-Bus Test System
For comprehensive consideration of convergence characteristic and running time, the parameter
Ns,
limit and
Lmax values are equal to 100, 30 and 200, respectively. The standard deviation value under these conditions is less than 1% from results of
Section 6.1.1, and it illustrates that the IABC algorithm has the better stability.
Firstly, the minimization of total fuel cost described by Equation (3) is selected as objective function for single objective OPF. The results obtained by the proposed IABC approach over 20 independent runs are compared to those obtained by the ABC algorithm, LDI-PSO algorithm [
31], GSA algorithm [
31], EGA algorithm [
32] and IEP algorithm [
33]. The results are summarized in the
Table 4.
Table 4.
Results obtained by different algorithms for OPF with total fuel cost.
Table 4.
Results obtained by different algorithms for OPF with total fuel cost.
| Method | Fuel cost ($/h) |
|---|
| Min | Average | Max |
|---|
| IABC | 800.4215 | 800.4359 | 800.4520 |
| ABC | 800.6850 | 800.7998 | 801.1376 |
| LDI-PSO [31] | 800.7398 | 801.5576 | 803.8698 |
| GSA [31] | 805.1752 | 812.1935 | 827.4950 |
| EGA [32] | 802.0600 | – | 802.1400 |
| IEP [33] | 802.4650 | – | – |
As shown in
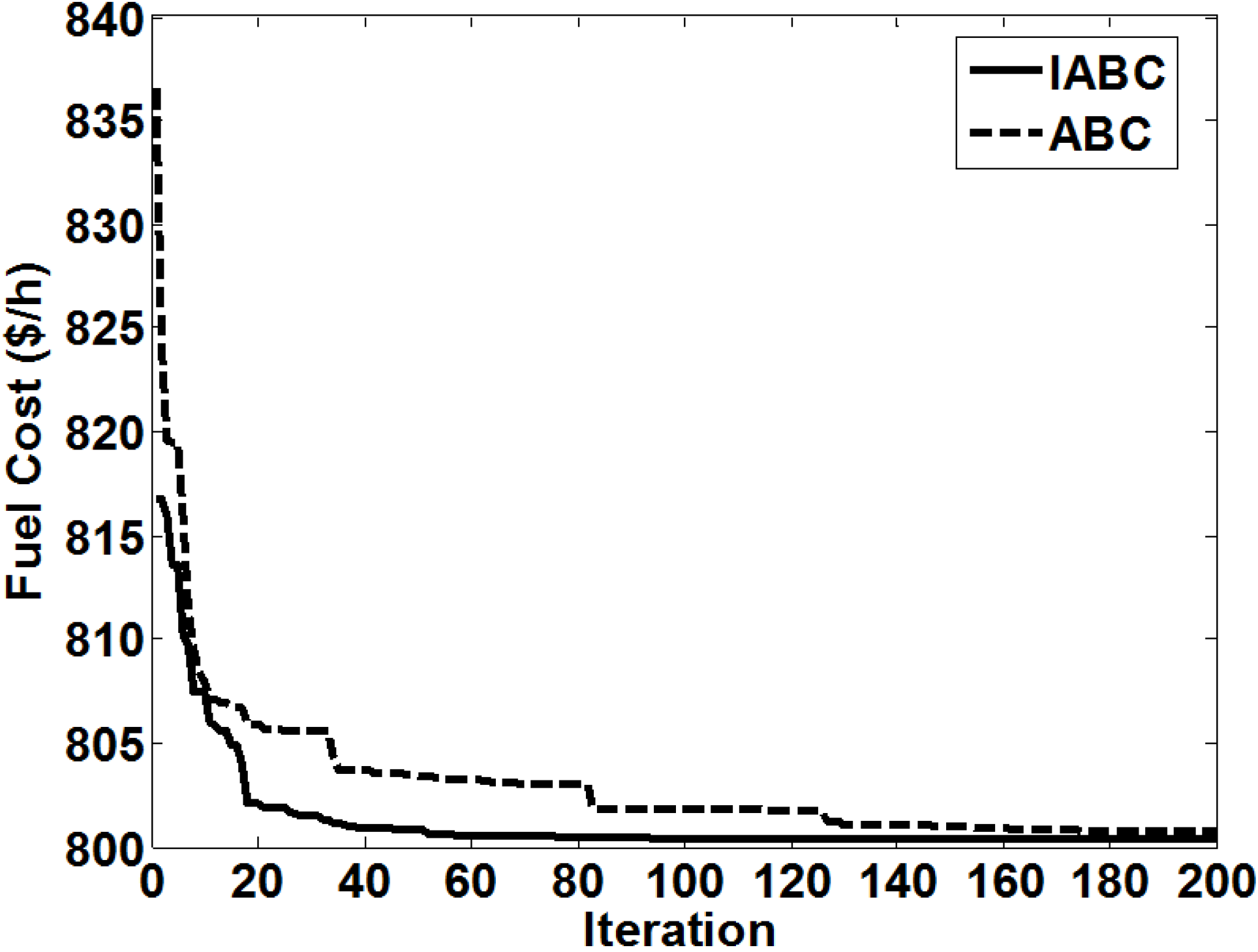
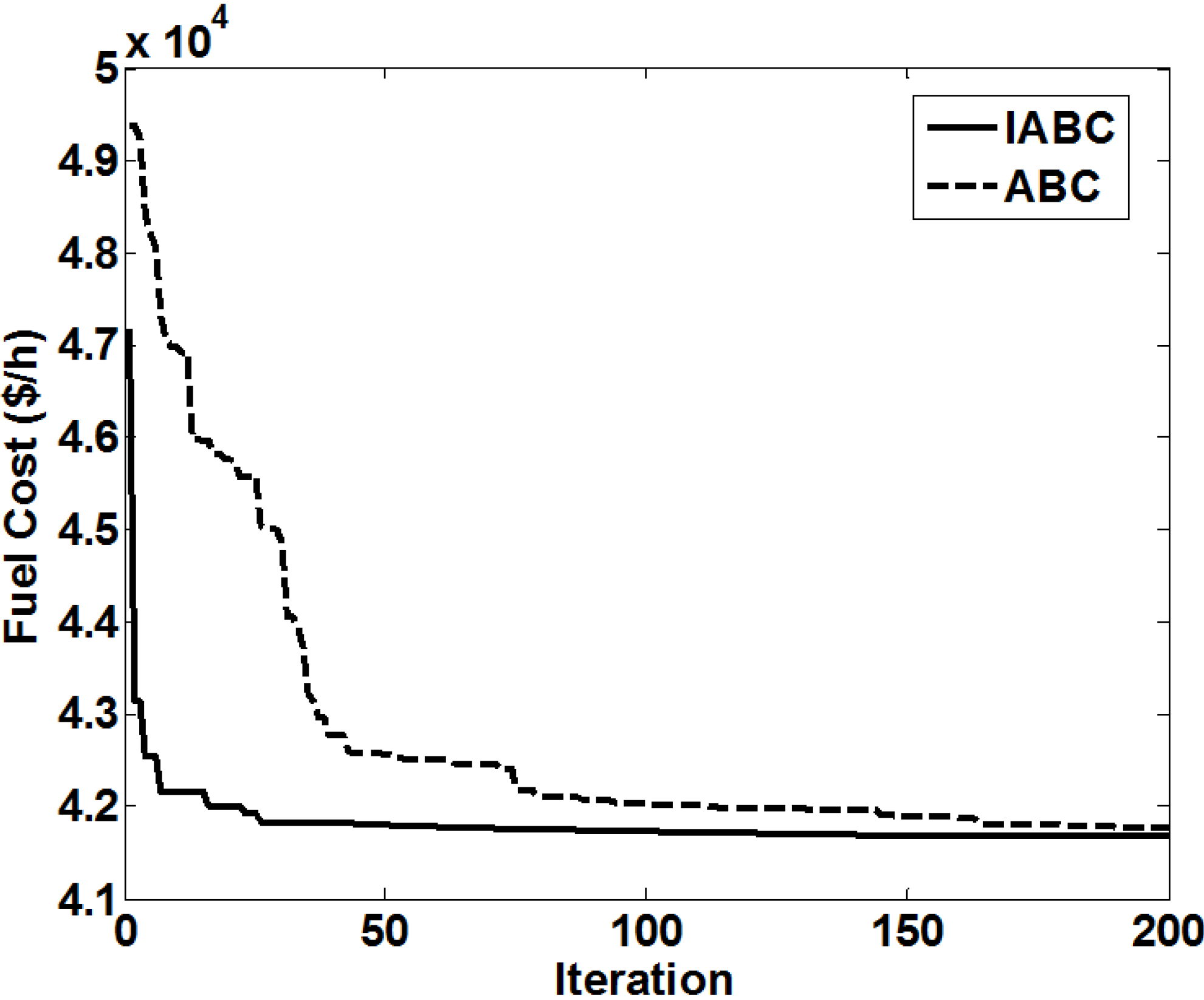
Table 4, the average total fuel cost value calculated by the IABC algorithm was 800.4359 $/h, and it is obviously less than the other average values calculated by the ABC and other optimization algorithms. The maximum and minimum values calculated by the IABC algorithm are better than those calculated by other algorithms. The results show that the ability of the IABC algorithm to find the optimal solution is better than that of the other algorithms. The convergence characteristics of IABC and ABC algorithms are shown in
Figure 7.
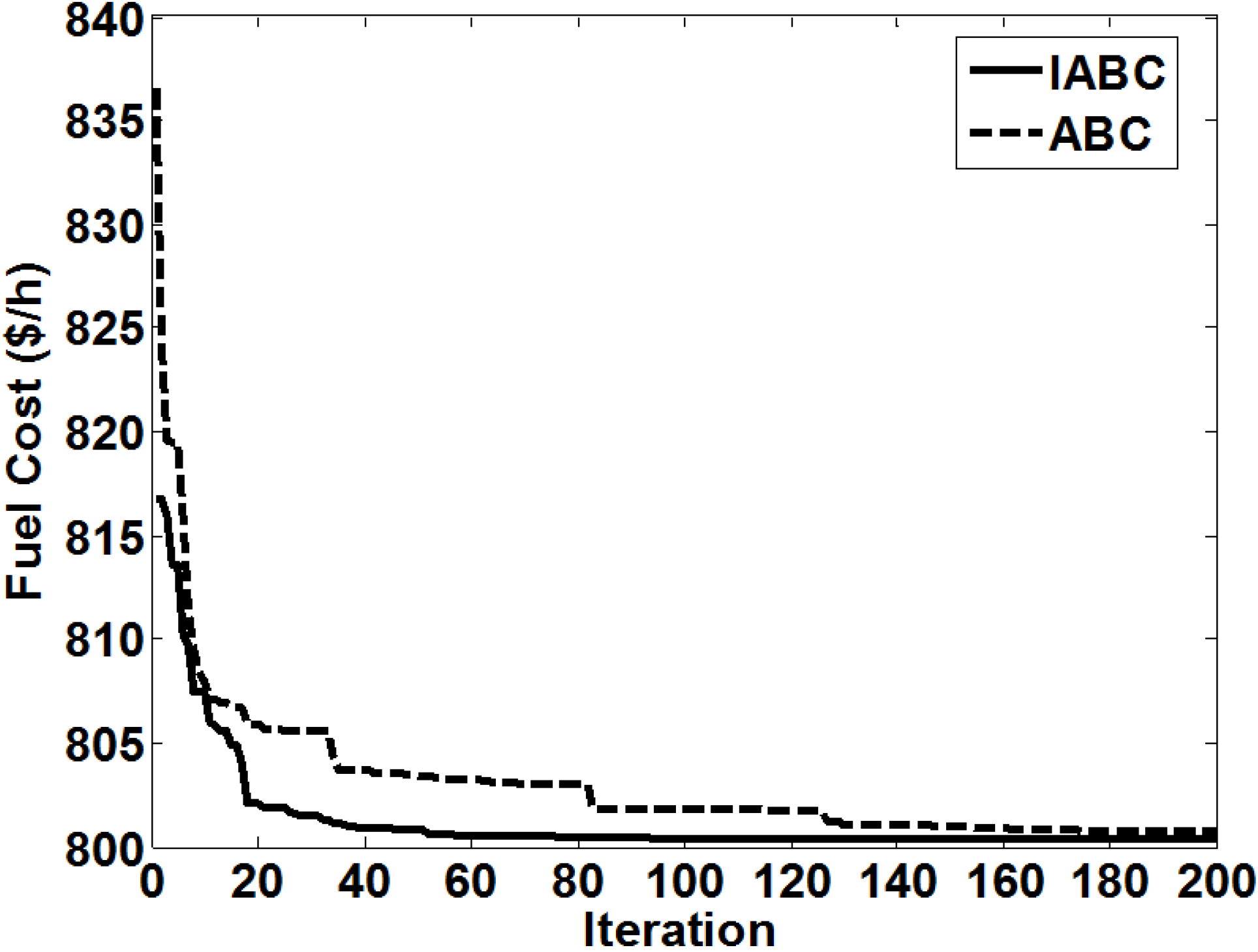
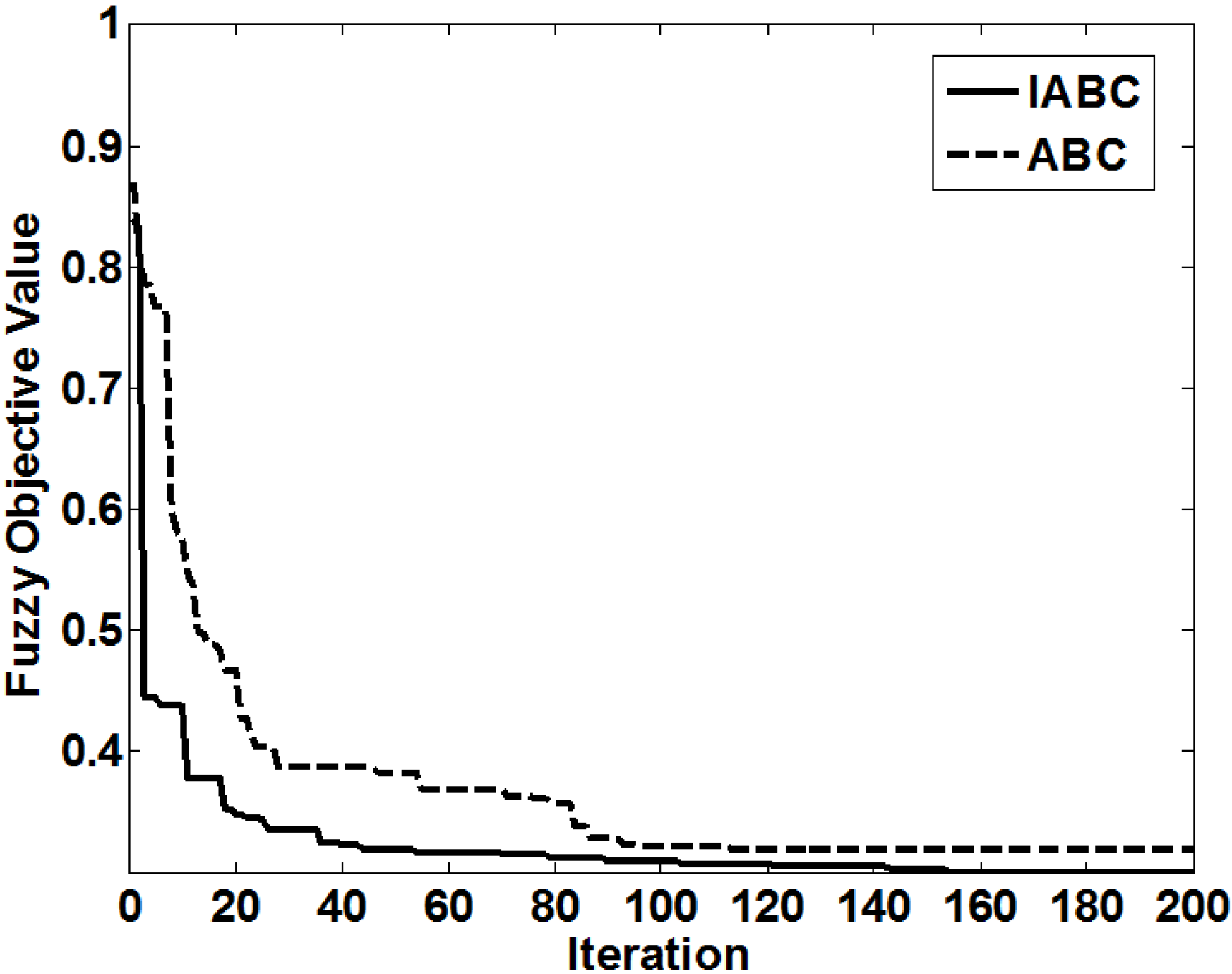
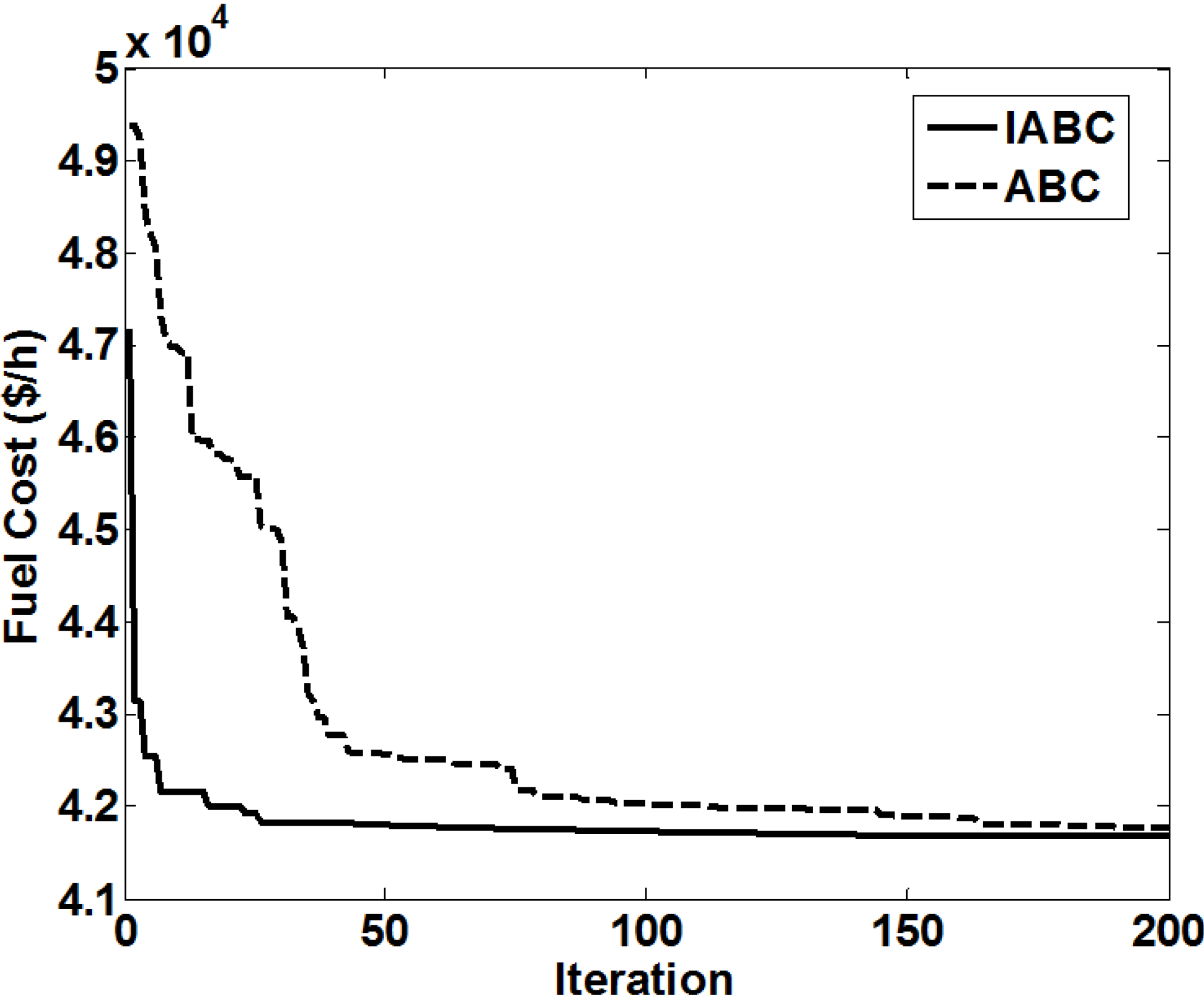
Figure 7.
Convergence characteristics of fuel cost for the IABC and ABC algorithms for an IEEE 30-bus system.
Figure 7.
Convergence characteristics of fuel cost for the IABC and ABC algorithms for an IEEE 30-bus system.
From
Figure 7 and the simulation data, it can be seen that when the iteration number reaches 60, the fuel cost value calculated by IABC is 800.5349 $/h, that is close to global optimal value 800.4215 $/h, however the value calculated by ABC is 804.2461 $/h, that is local optimal value. It also can be seen that the IABC convergence curve is smoother than those of the ABC algorithm. The results demonstrate the convergent performance of the IABC algorithm is better than that of the ABC algorithm.
To further demonstrate the superiority of the IABC algorithm, the other single OPF with different objective functions described by Equations (4)–(6) have been simulated. The results obtained by the IABC algorithm are compared to of the ABC algorithm, MSFLA algorithm [
34], GA algorithm [
34], PSO algorithm [
35], DE algorithm [
36], BBO algorithm [
37] and DE algorithm [
38]. The results are given in the
Table 5. As shown in
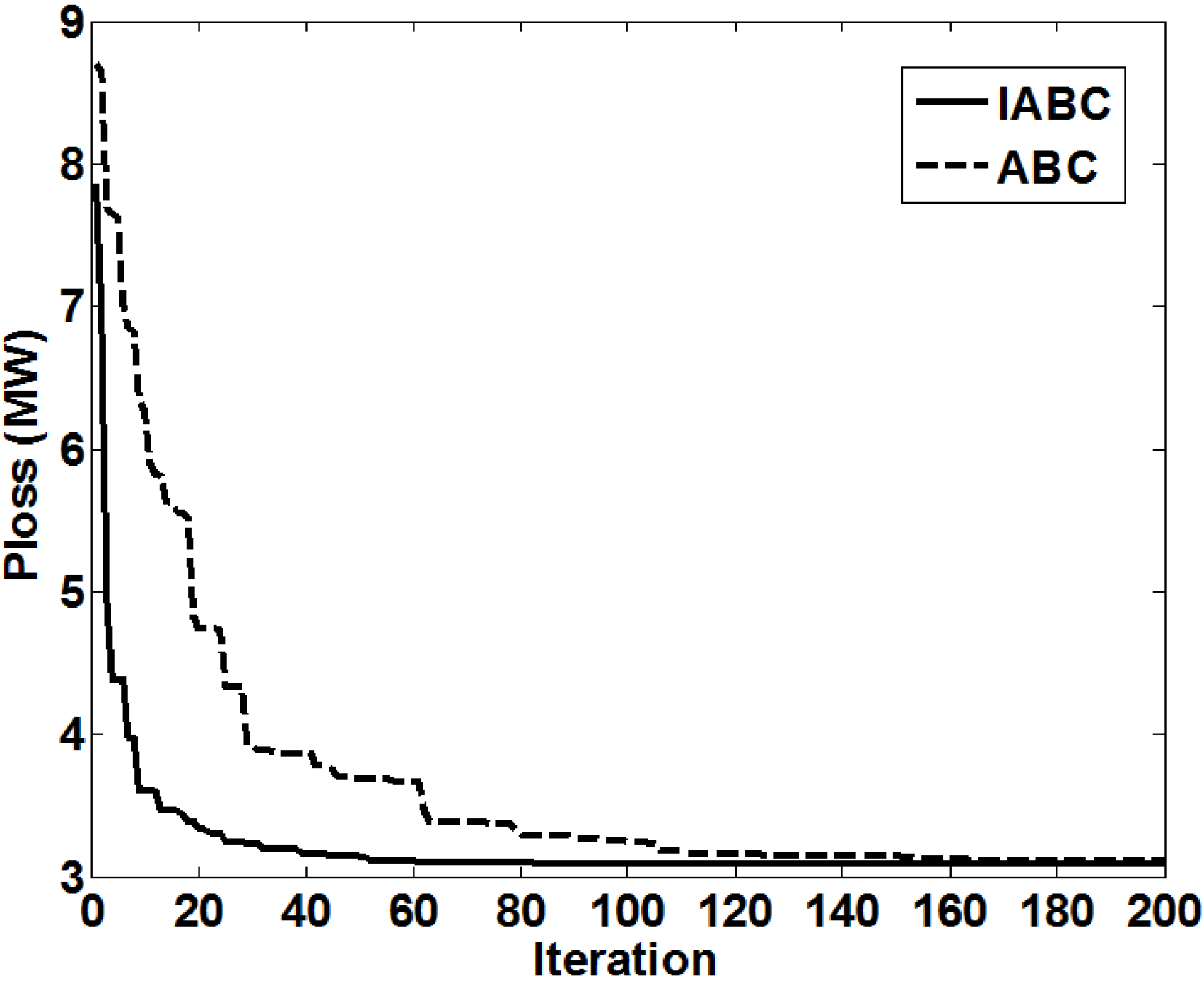
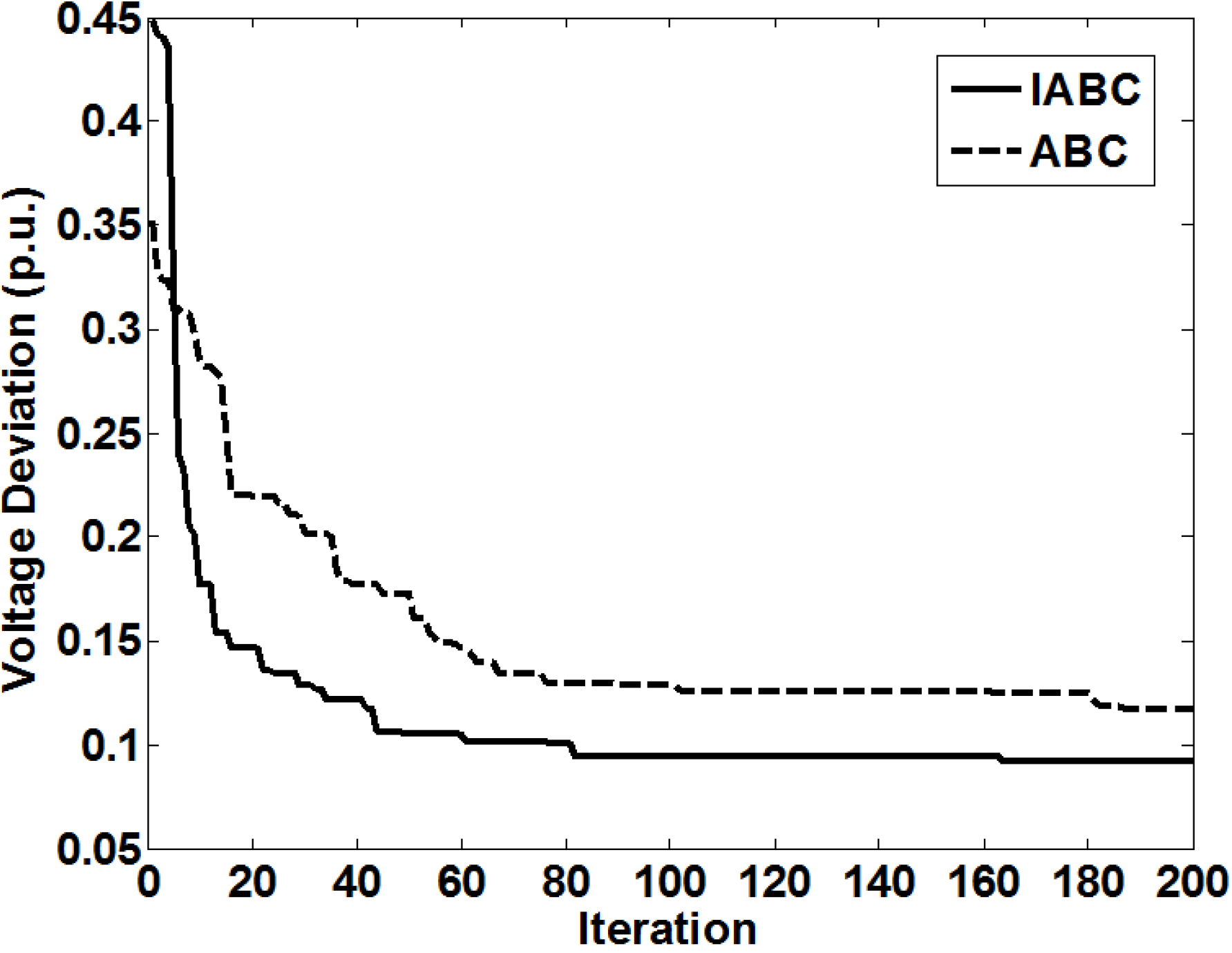
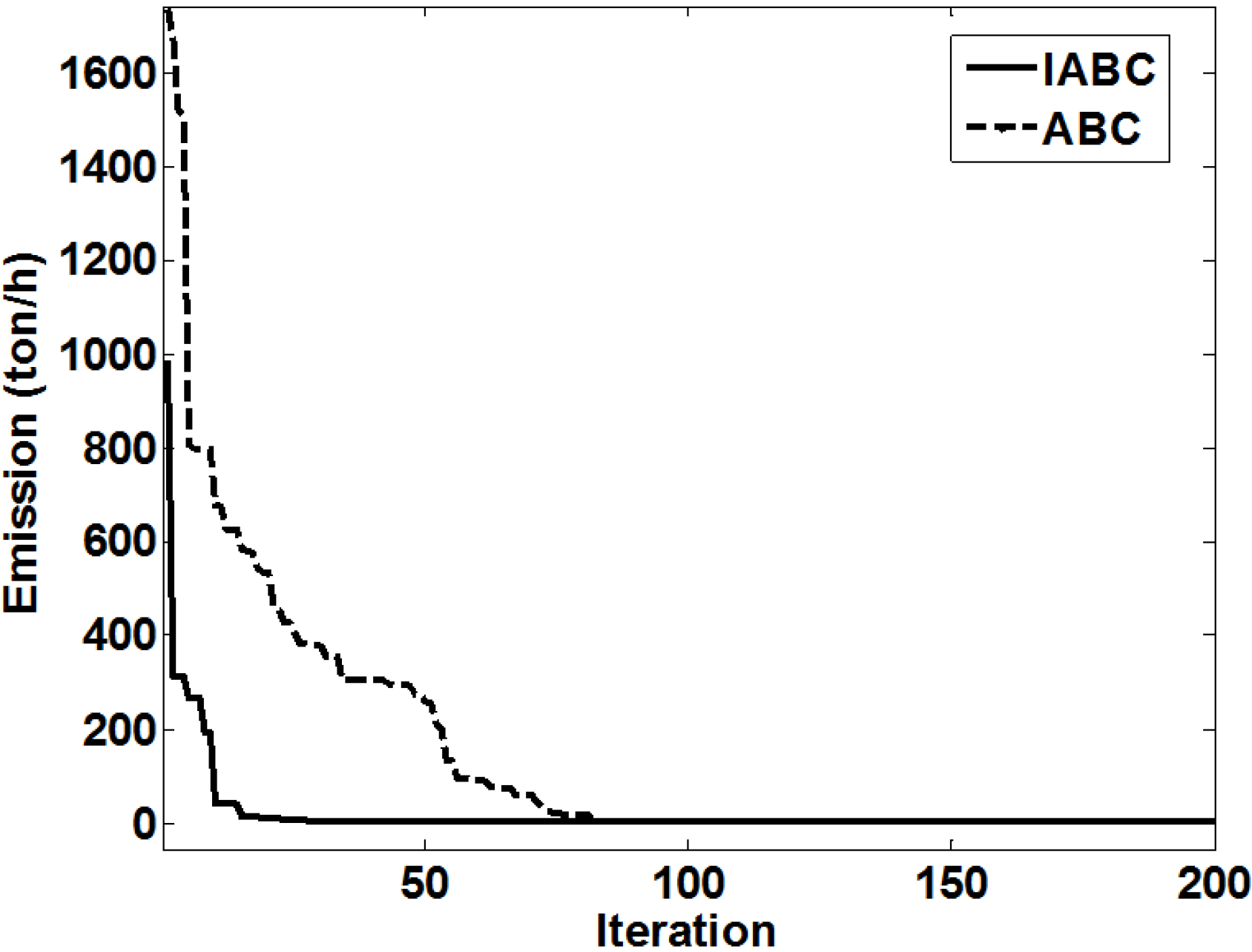
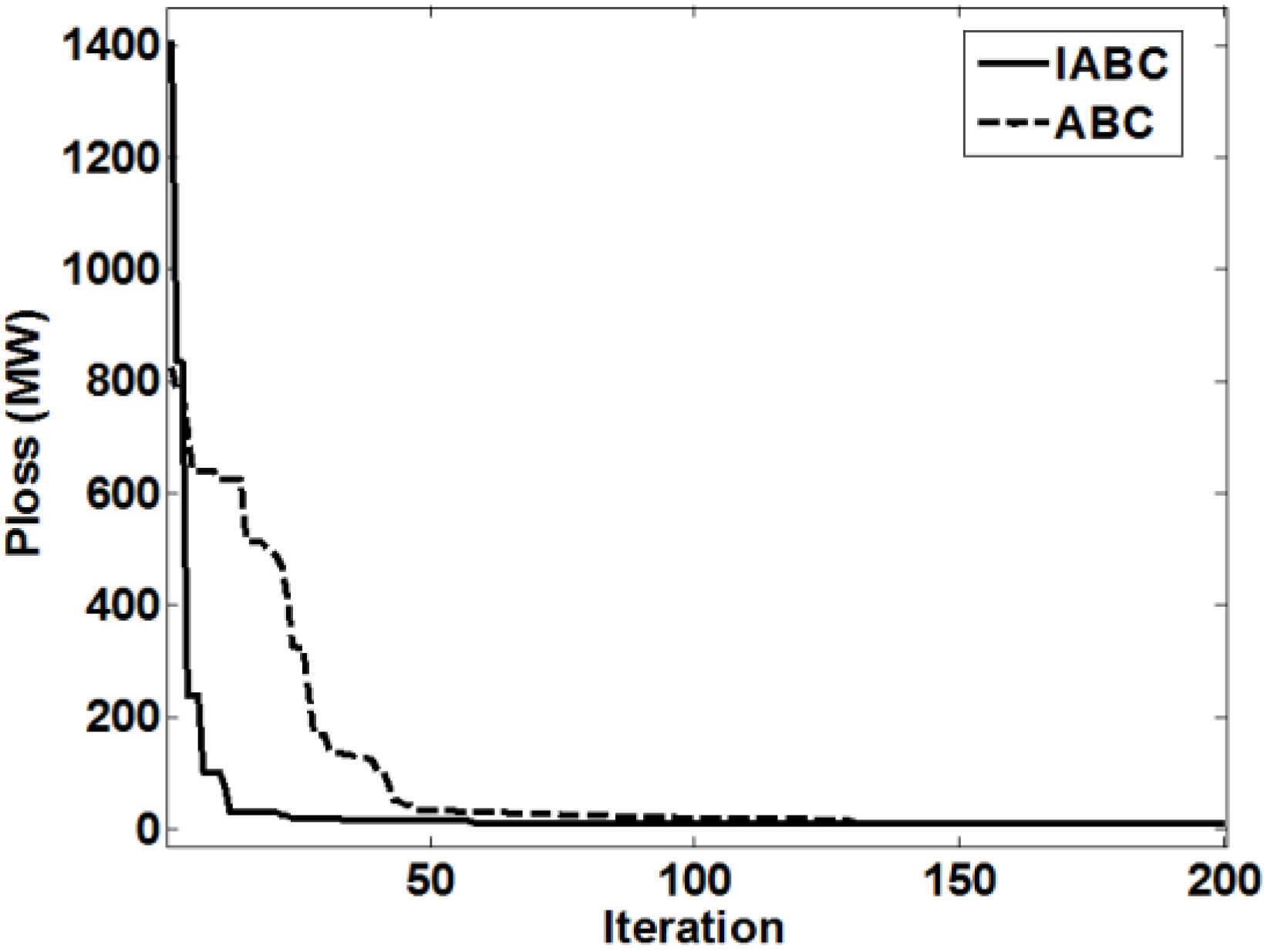
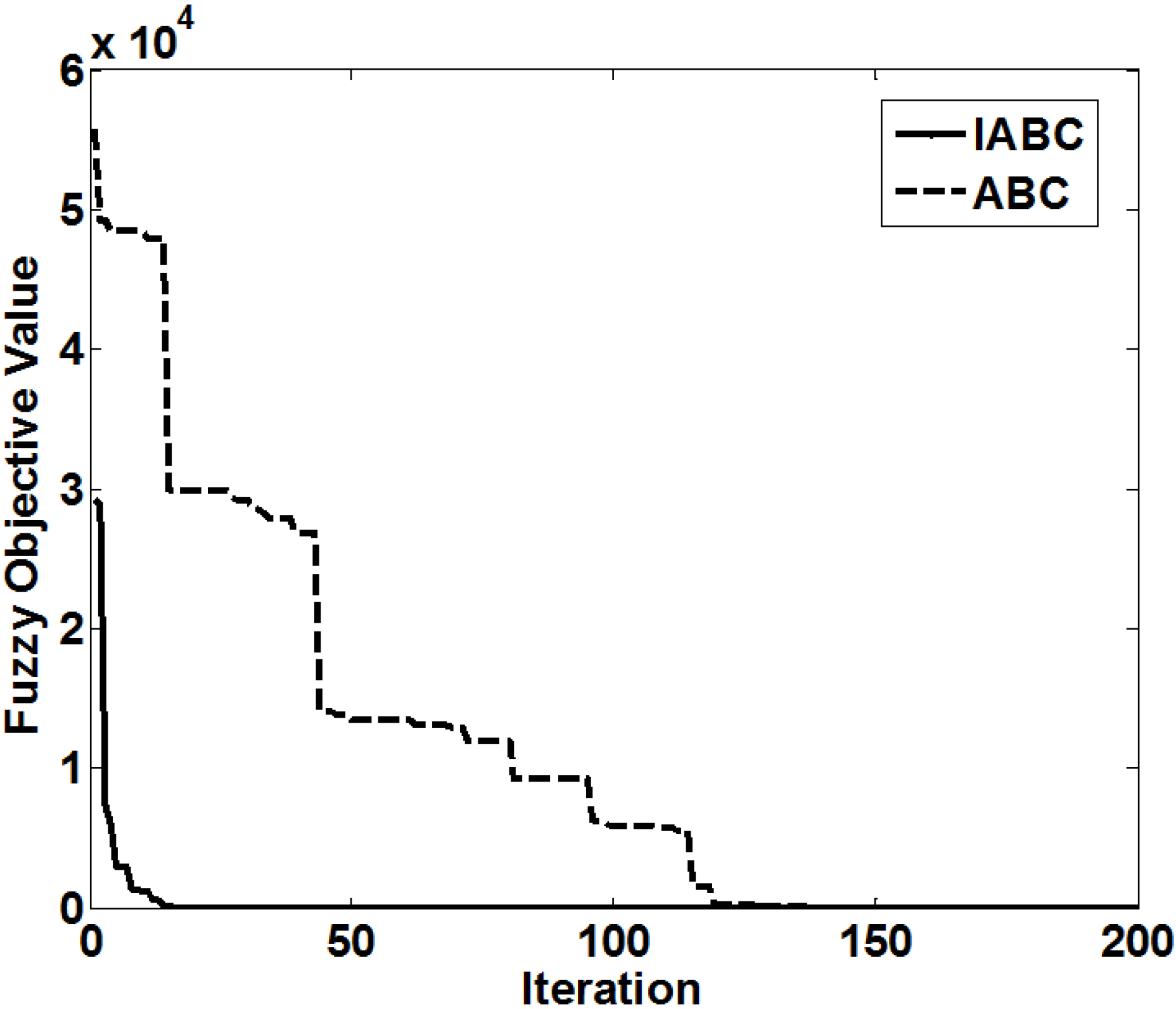
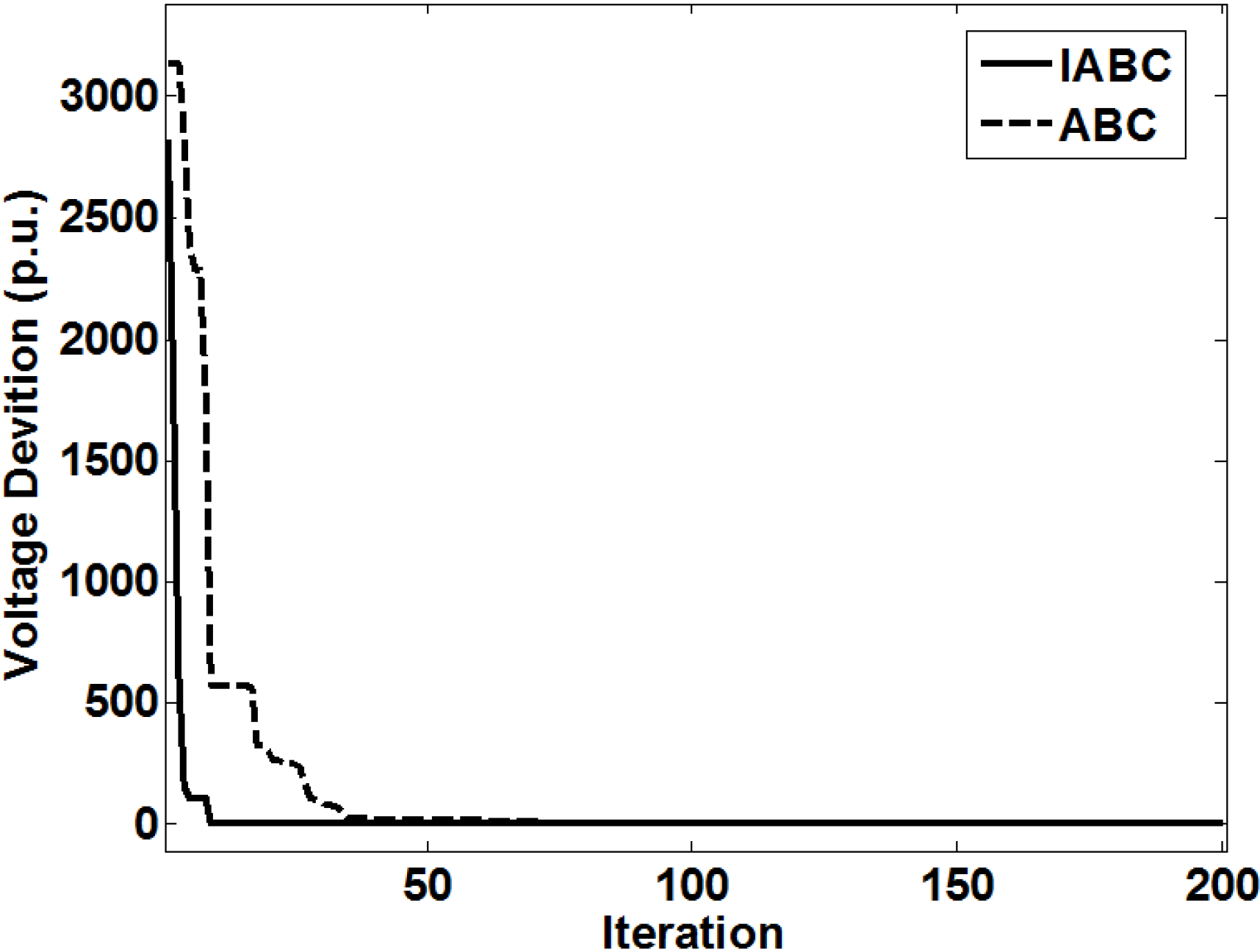
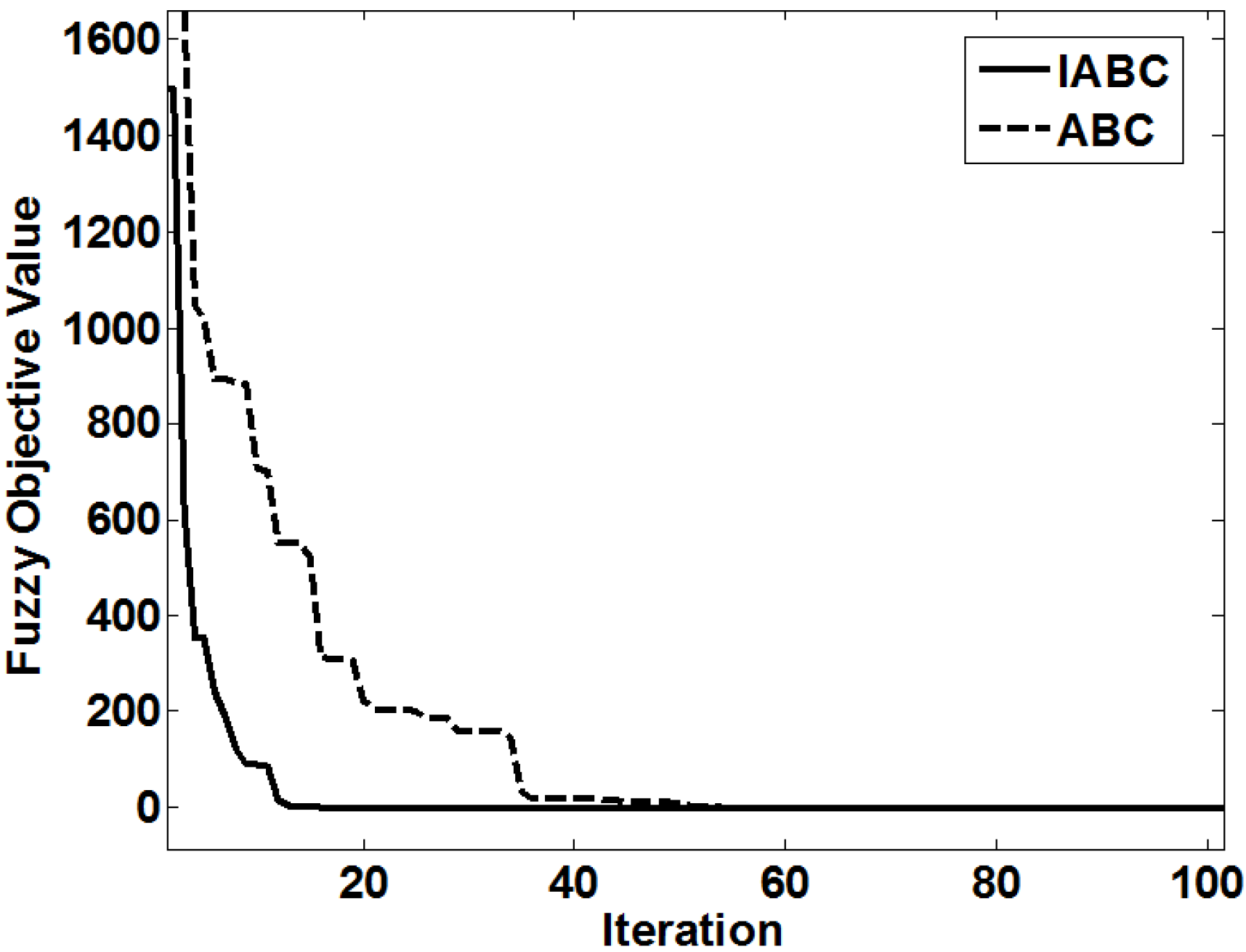
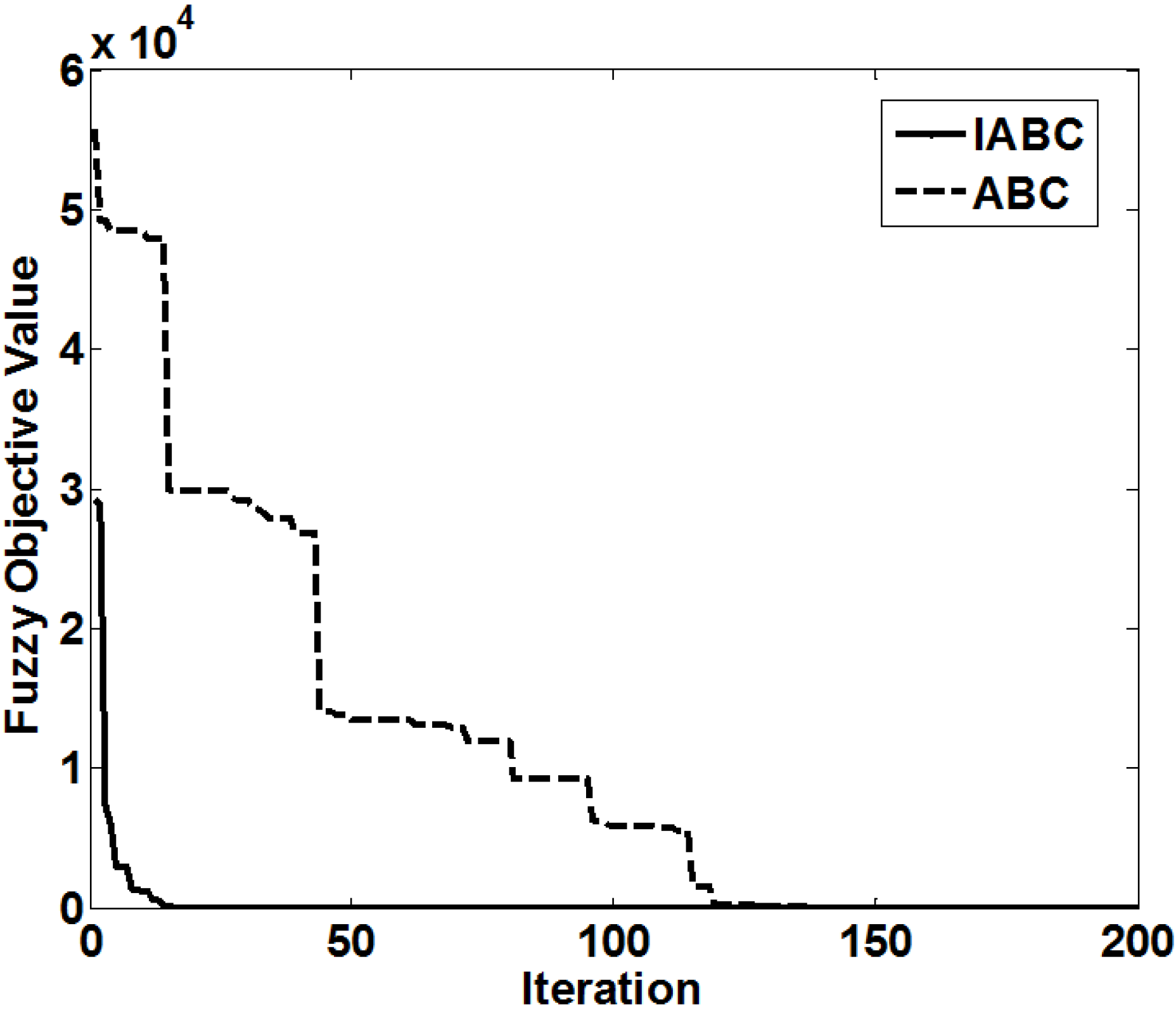
Table 5, the optimal values of total emission, power loss and voltage deviation calculated by IABC are 0.1943 ton/h, 3.0917 MW, 0.0918 p.u., respectively, which are smaller than those calculated by the other algorithms. The results show that the IABC algorithm has better performance than the other algorithms for solving different single objective OPF problems. The convergence characteristics of the IABC and ABC algorithms are shown in
Figure 8,
Figure 9 and
Figure 10.
Table 5.
Results obtained by the different algorithms for the single objective OPF.
Table 5.
Results obtained by the different algorithms for the single objective OPF.
| Method | Objective function |
|---|
| Emission (ton/h) | Active power loss (MW) | Voltage deviation (p.u.) |
|---|
| IABC | 0.1943 | 3.0917 | 0.0918 |
| ABC | 0.1943 | 3.1216 | 0.1179 |
| MSFLA [34] | 0.2056 | – | – |
| GA [34] | 0.2117 | – | – |
| PSO [35] | – | 3.6294 | – |
| DE [36] | – | 3.2400 | – |
| BBO [37] | – | – | 0.1020 |
| DE [38] | – | – | 0.1357 |
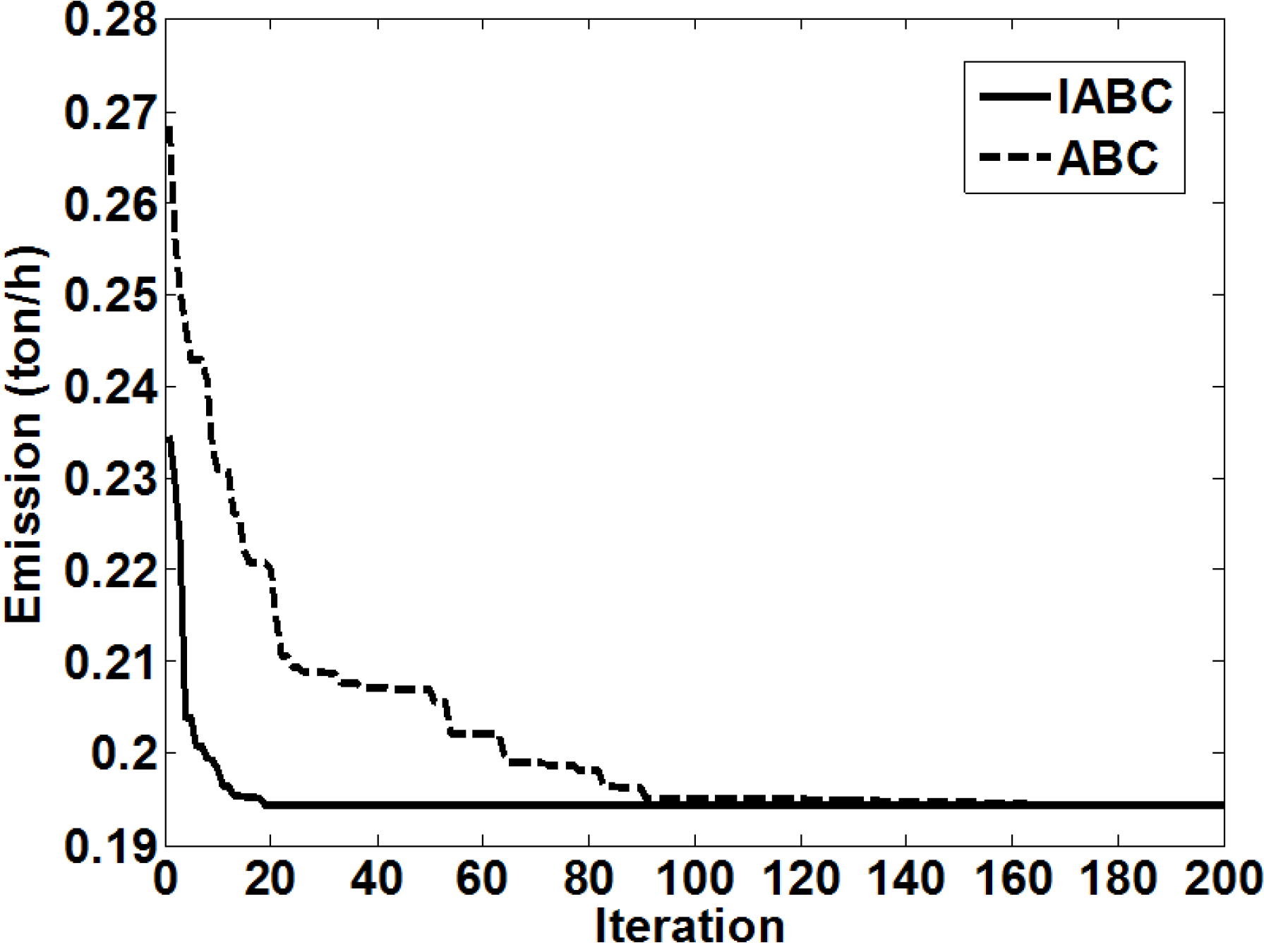
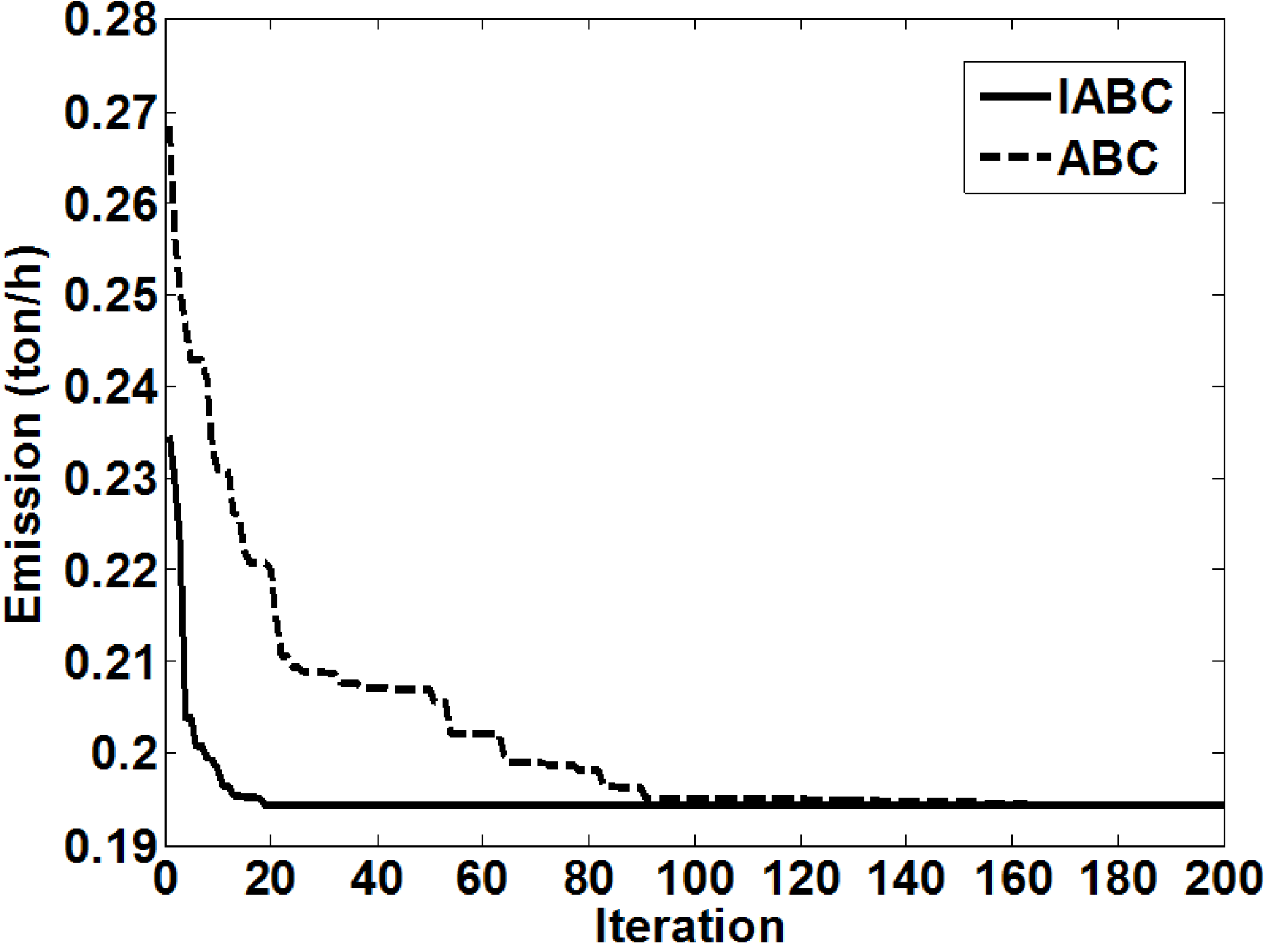
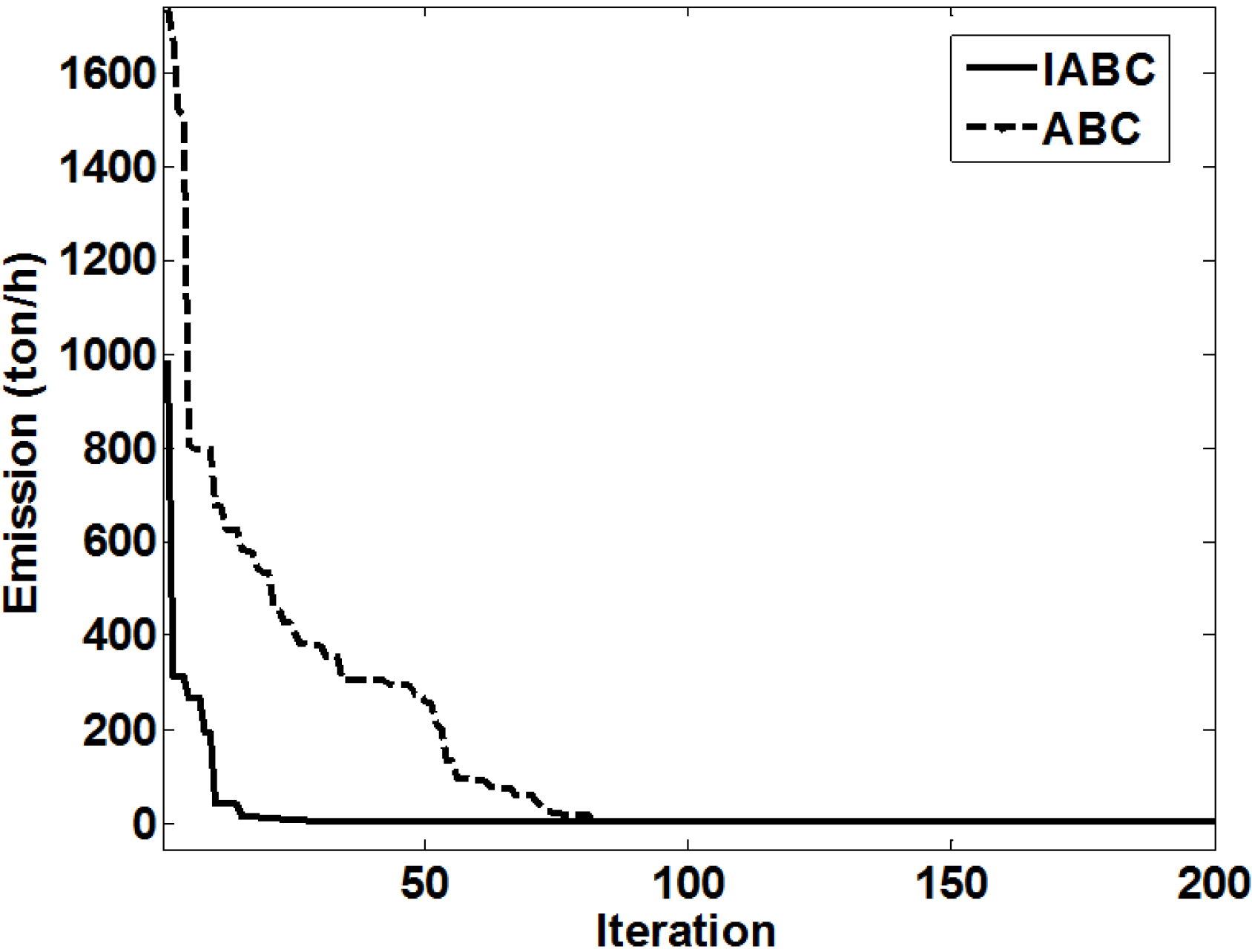
Figure 8.
Convergence characteristics of total emission of the IABC and ABC algorithms for the IEEE 30-bus system.
Figure 8.
Convergence characteristics of total emission of the IABC and ABC algorithms for the IEEE 30-bus system.
From
Figure 8 and simulation data, it can be seen that when the iteration number reaches up to 20 the emission value of 0.1943 ton/h calculated by the IABC algorithm is a global optimal value, however the value calculated by the ABC algorithm is a local optimal value. From
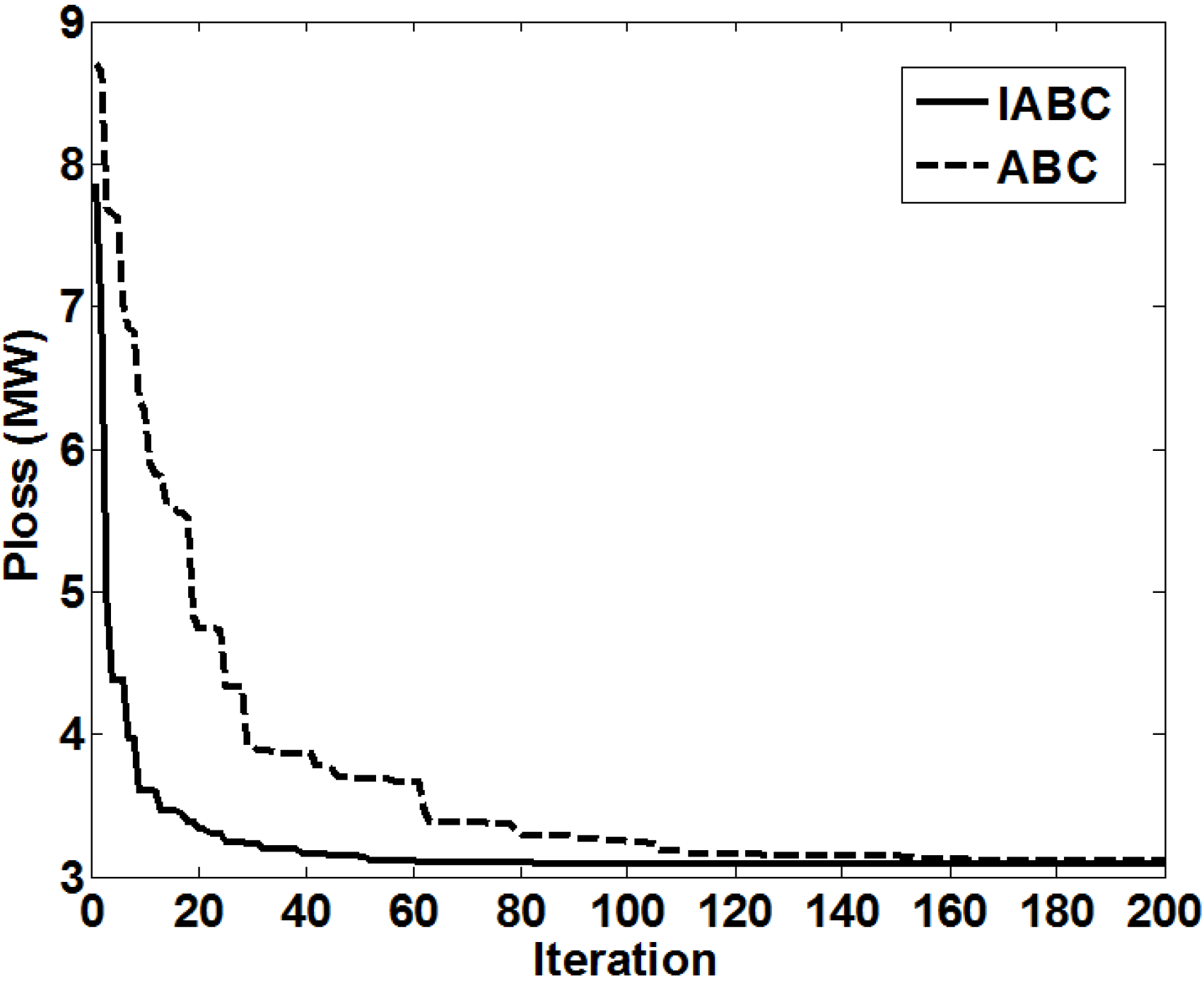
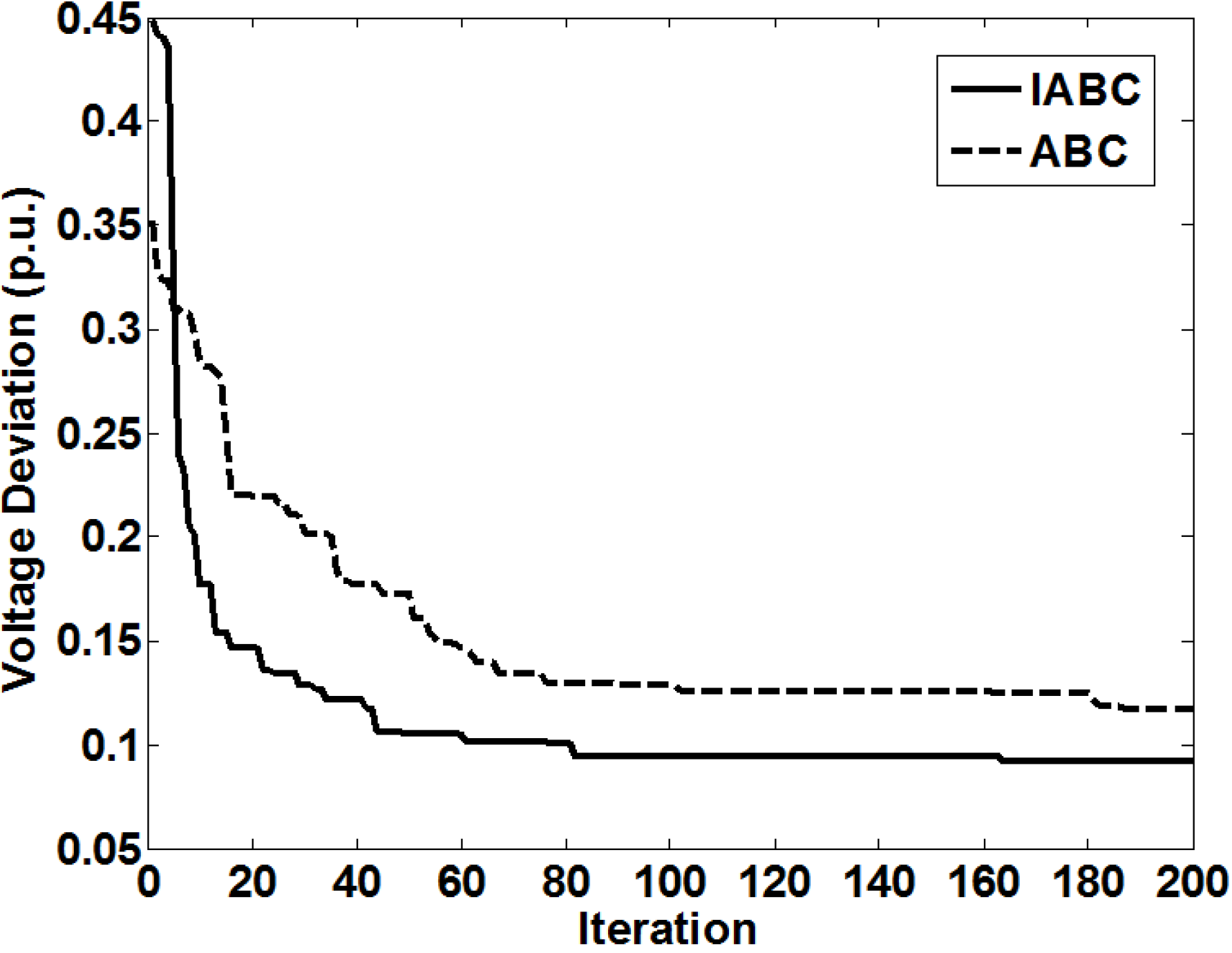
Figure 9 and
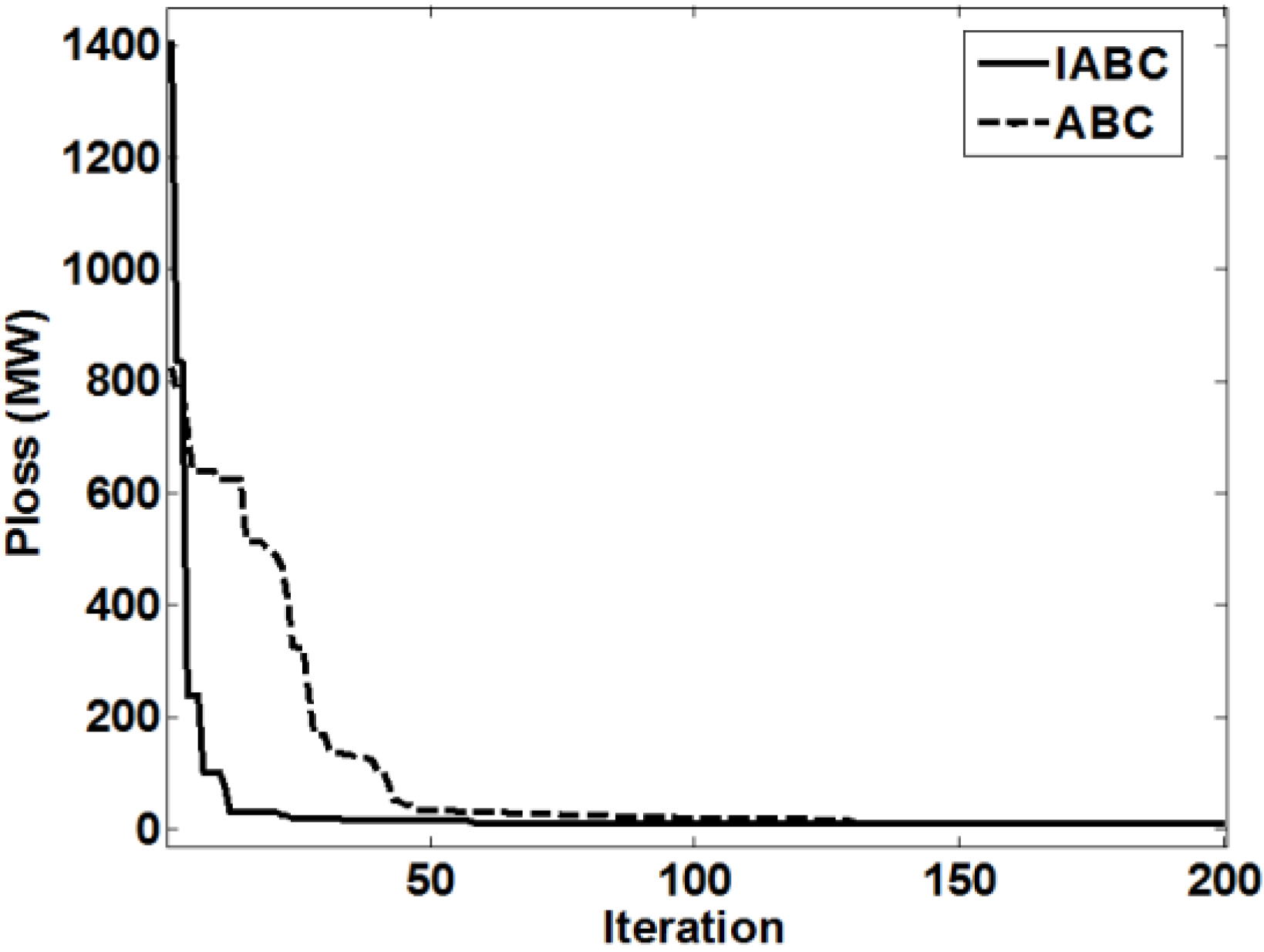
Figure 10, it also can be seen that the IABC algorithm converges to highest quality solution among the other algorithms in less iterations. In additional, it can be seen that the convergence curve of the IABC one is smoother than that of the other algorithms. The results demonstrate that the convergence rate and convergence capacity of the IABC algorithm are obviously better than those of the ABC algorithm.
From the results of
Section 6.1.2, it can be seen that the convergence capacity and the optimal value of the IABC algorithm are better than those of the ABC algorithm and other heuristic algorithms, which demonstrates the effectiveness and superiority of the IABC algorithm to solve the single objective OPF problem.
Figure 9.
Convergence characteristics of power loss of the IABC and ABC algorithms for the IEEE 30-bus system.
Figure 9.
Convergence characteristics of power loss of the IABC and ABC algorithms for the IEEE 30-bus system.
Figure 10.
Convergence characteristics of voltage deviation of the IABC and ABC algorithms for the IEEE 30-bus system.
Figure 10.
Convergence characteristics of voltage deviation of the IABC and ABC algorithms for the IEEE 30-bus system.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}