
Voltage Control Method Using Distributed Generators Based on a Multi-Agent System


Abstract
:1. Introduction
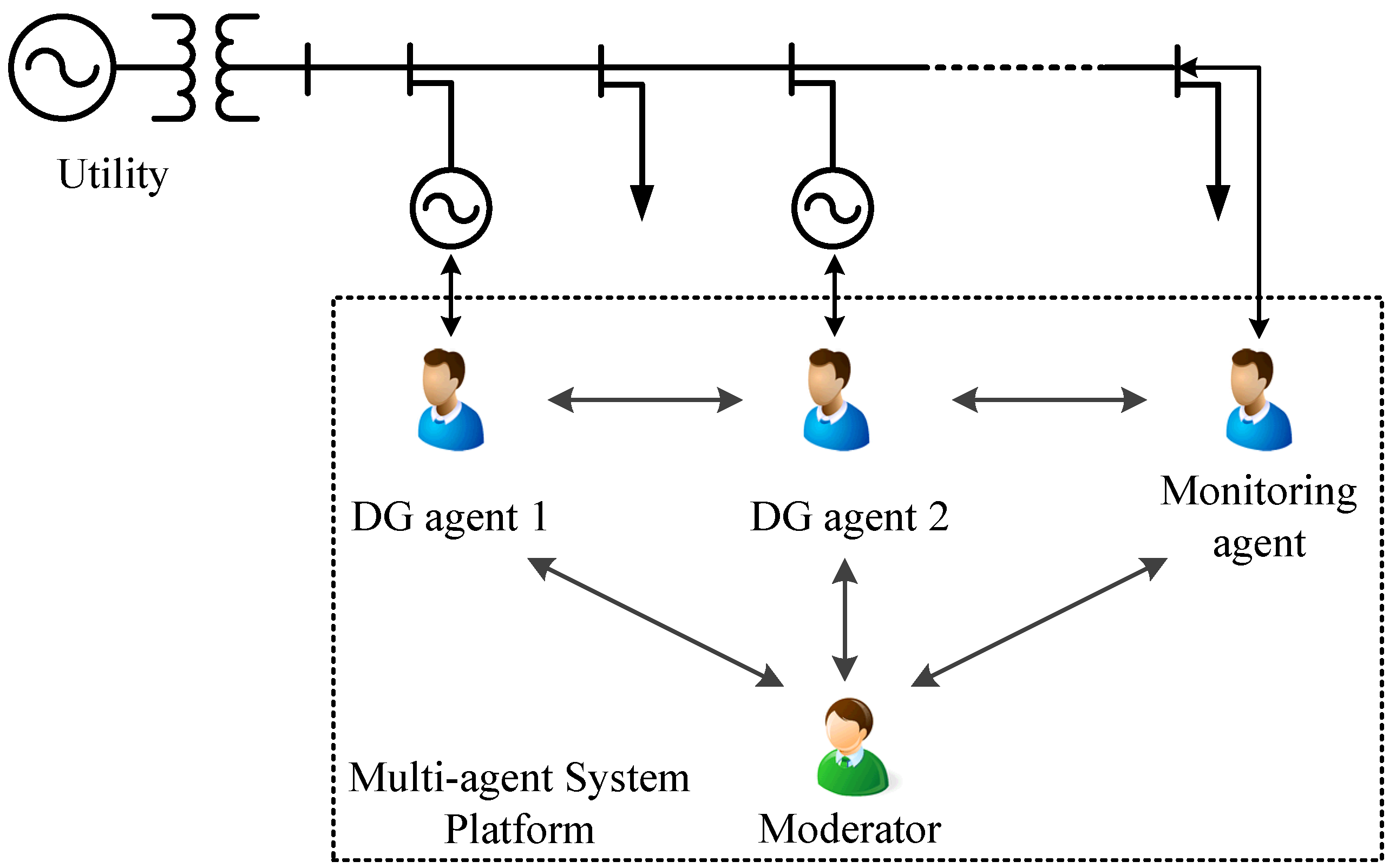
2. Voltage Regulation Using Multi-Agent System
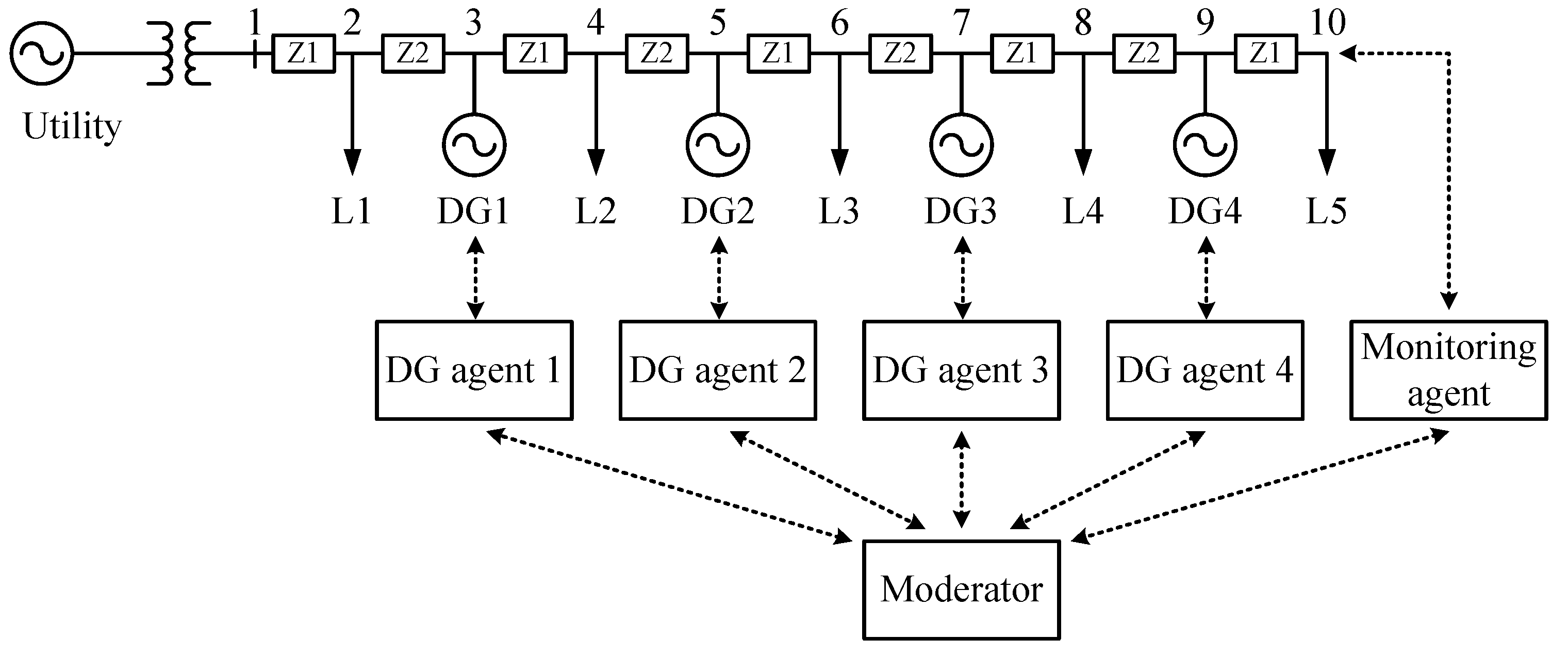
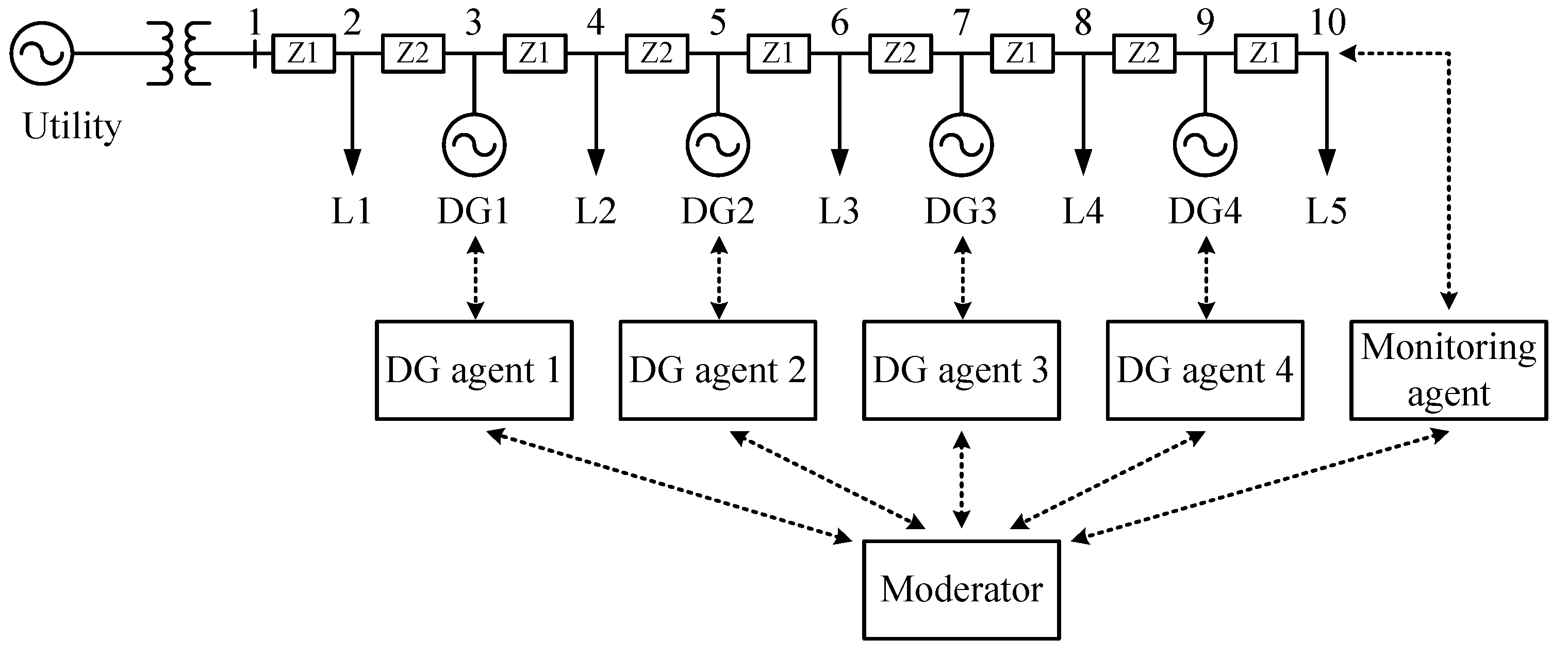
2.1. Multi-Agent System for Voltage Regulation
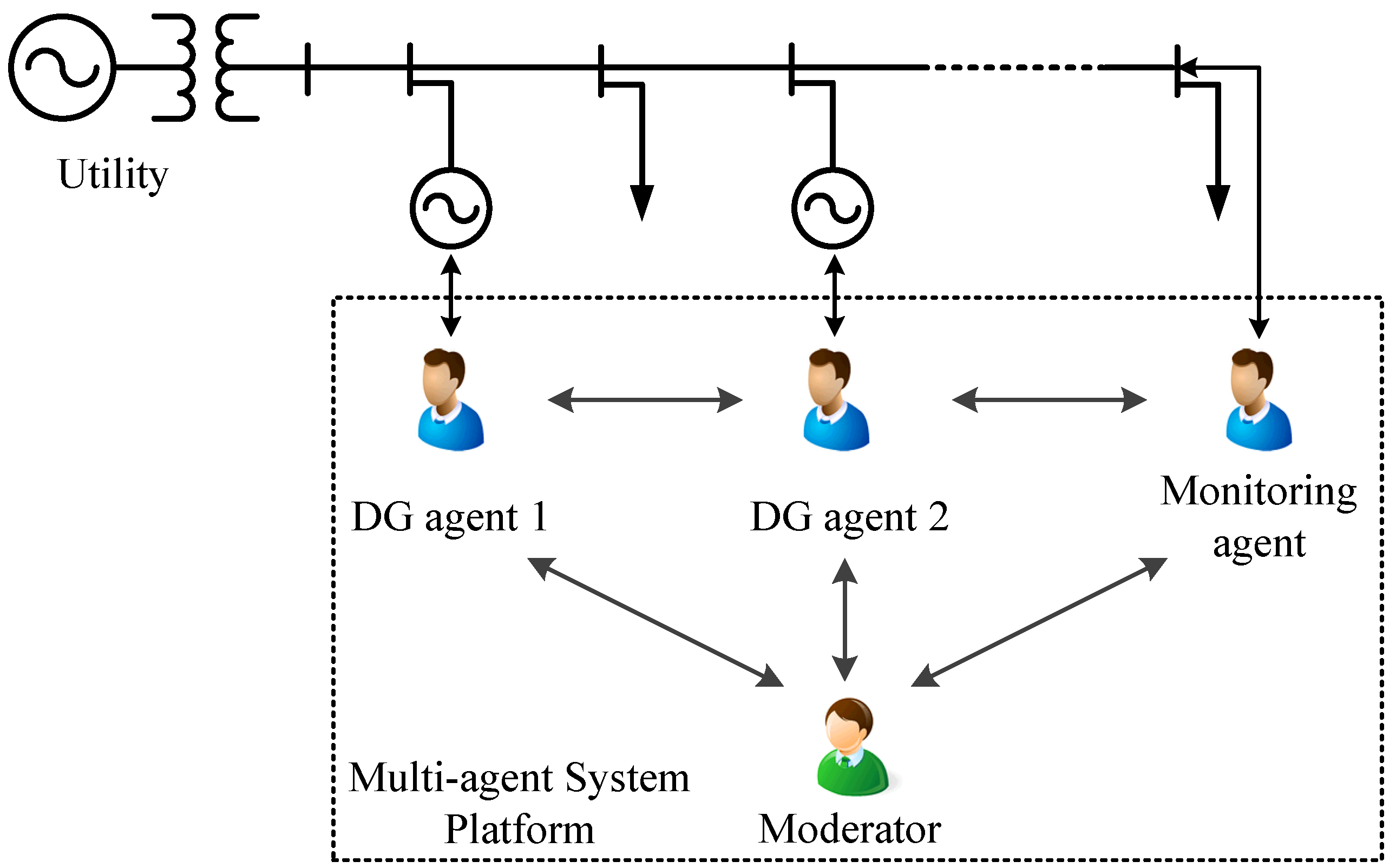
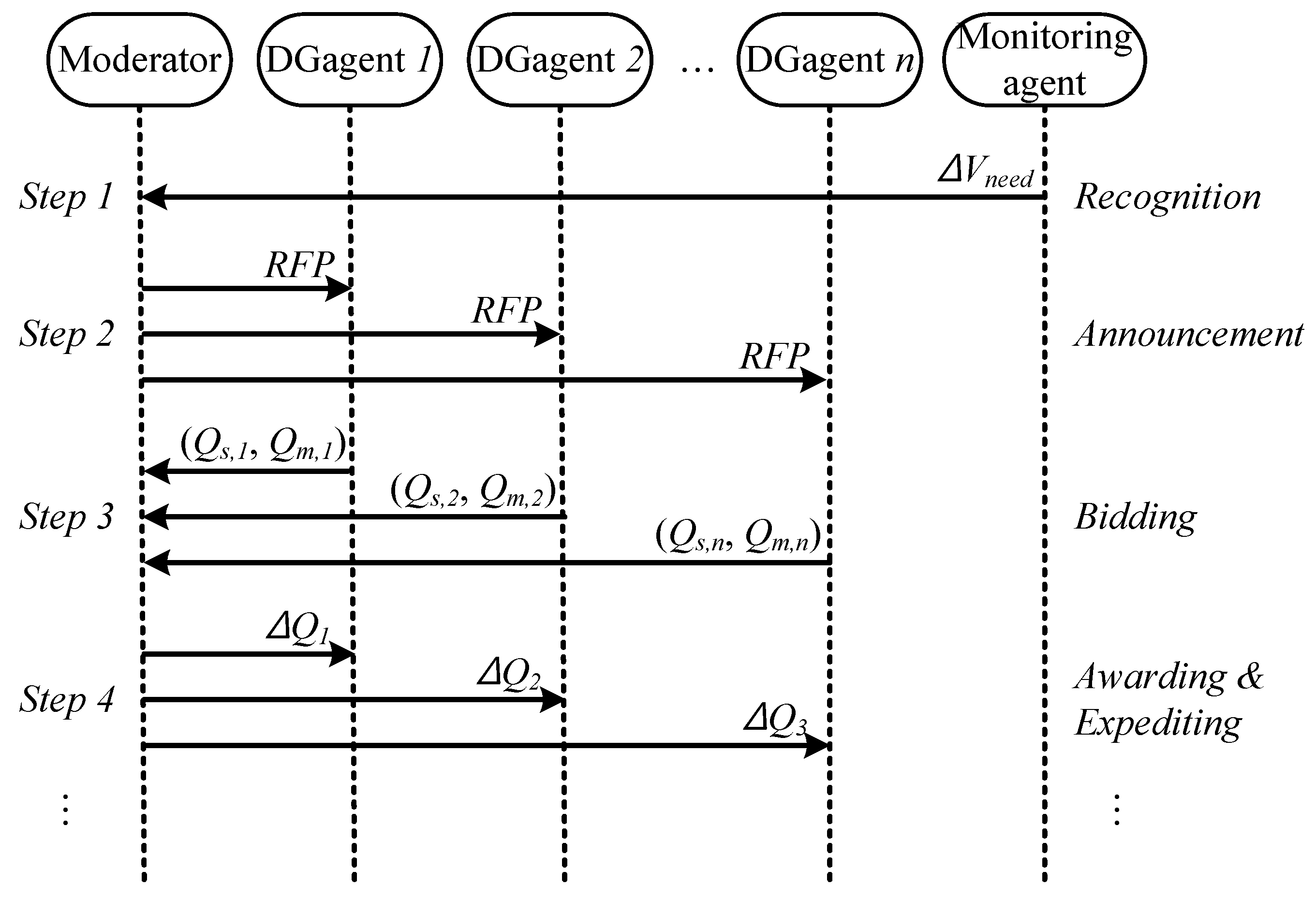
2.2. Voltage Control Process Based on Multi-Agent System
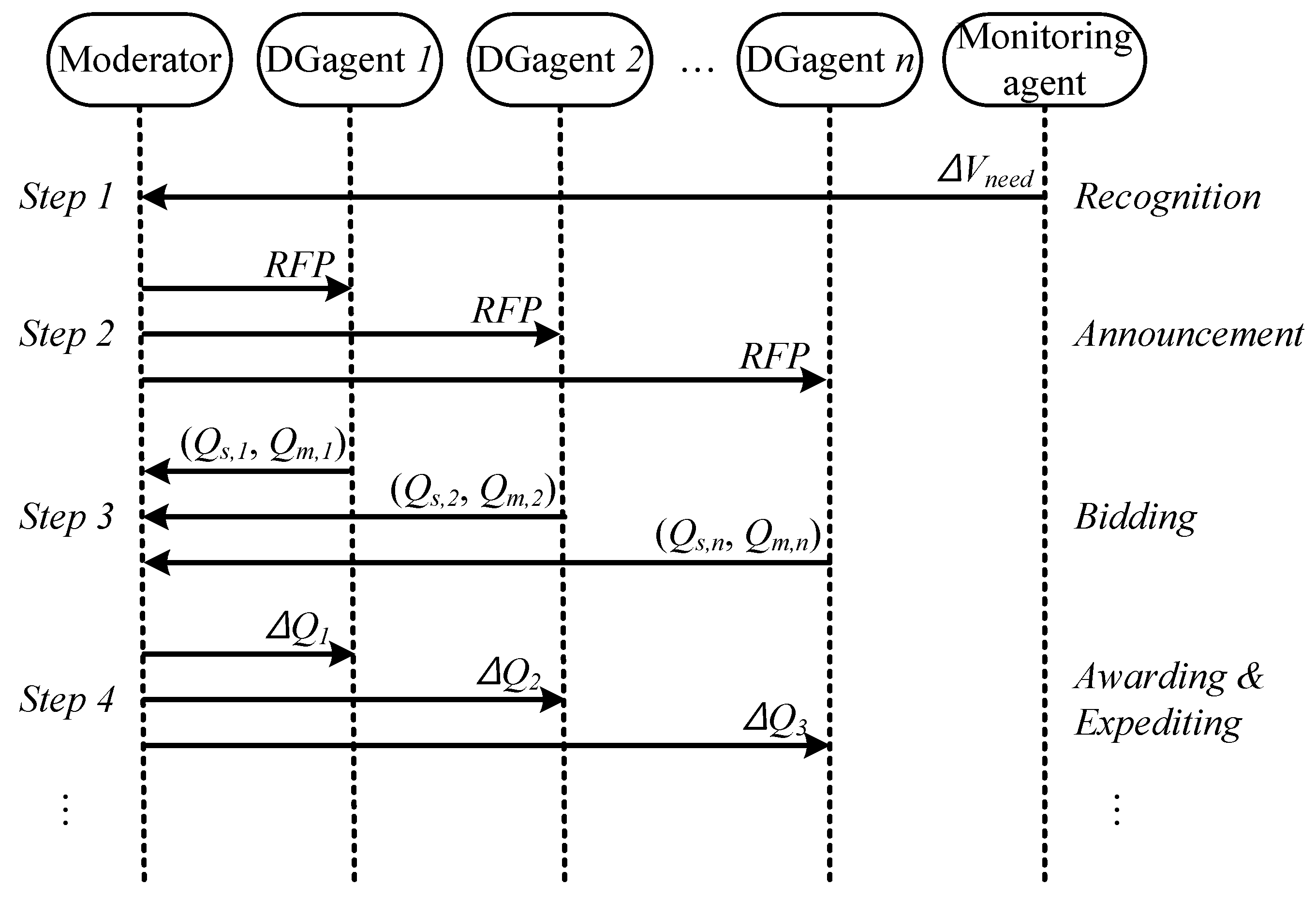
- Recognition: In the normal state, monitoring agents measure a local node voltage. If the node voltage moves outside the predetermined range (typically of the rated voltage), the monitoring agent informs the moderator with a request message for voltage compensation. Therefore, the voltage deviation, , that requires restoration to the normal state is included in this request message.
- Announcement: Once the request message for voltage compensation has been received by the moderator, it requests voltage control proposals from all DG agents. The bidding process begins with the issuance of a request for proposal (RFP).
- Bidding: DG agents respond to this RFP by sending a proposal if they are able to participate in voltage control. In this proposal, two items of power system data are included: the reactive power sensitivity, , and the reactive power margin, . Definitions of these quantities and the derivative methods employed to make the proposals are detailed in the following subsection.
- Awarding: The moderator reviews the proposals and decides how much of the reactive power is to be controlled by each DG for restoring the voltage error. That is to say, the moderator assigns tasks to the DG agents. These tasks are allocated as an increase or decrease in the reactive power at one or more DGs.
- Expediting: Finally, once the task for increasing or decreasing the reactive power of DG has been received by each DG agent, it completes the assigned task by dispatching the reactive power reference to its own DG unit.
2.3. Bidding

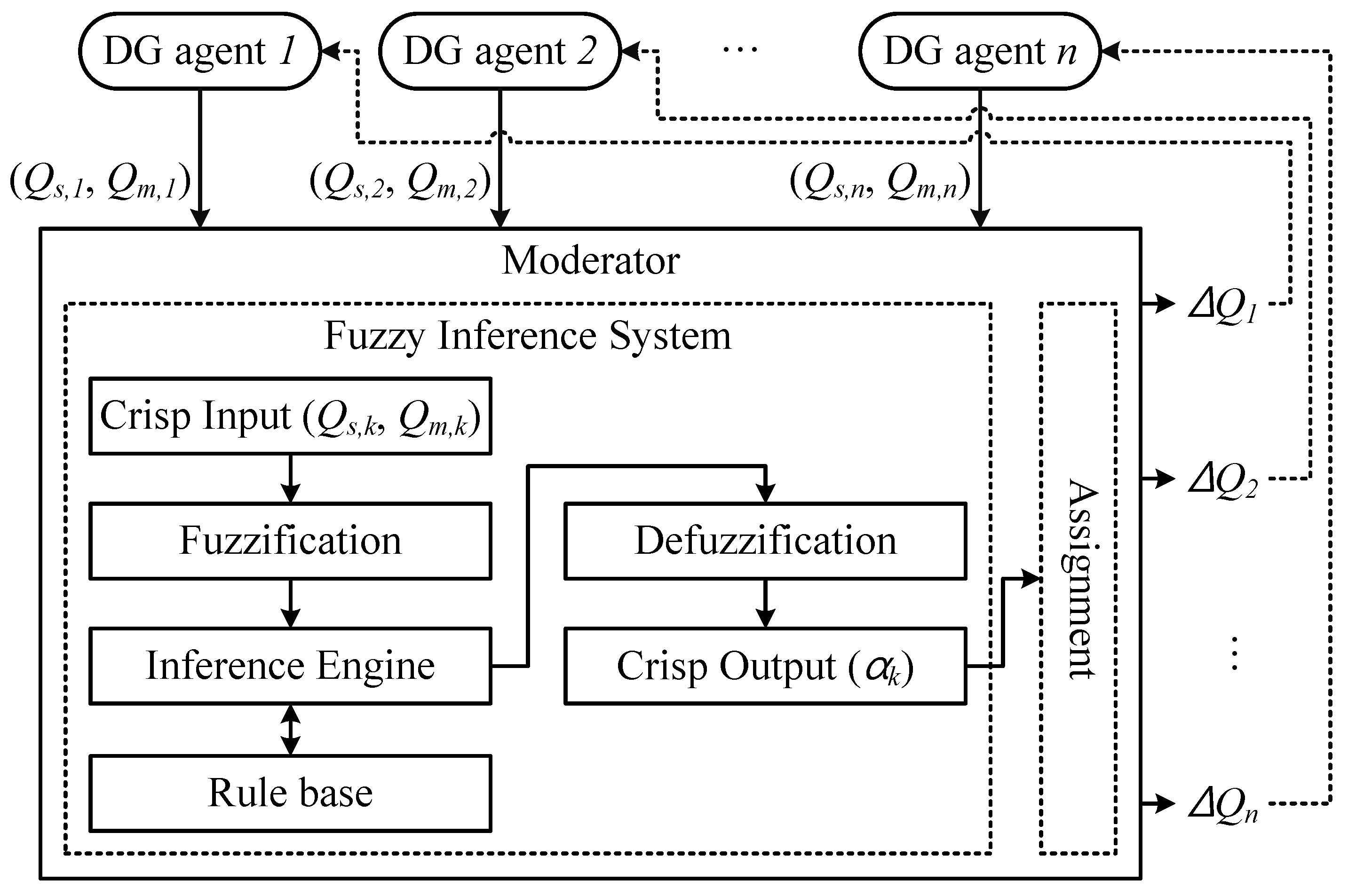
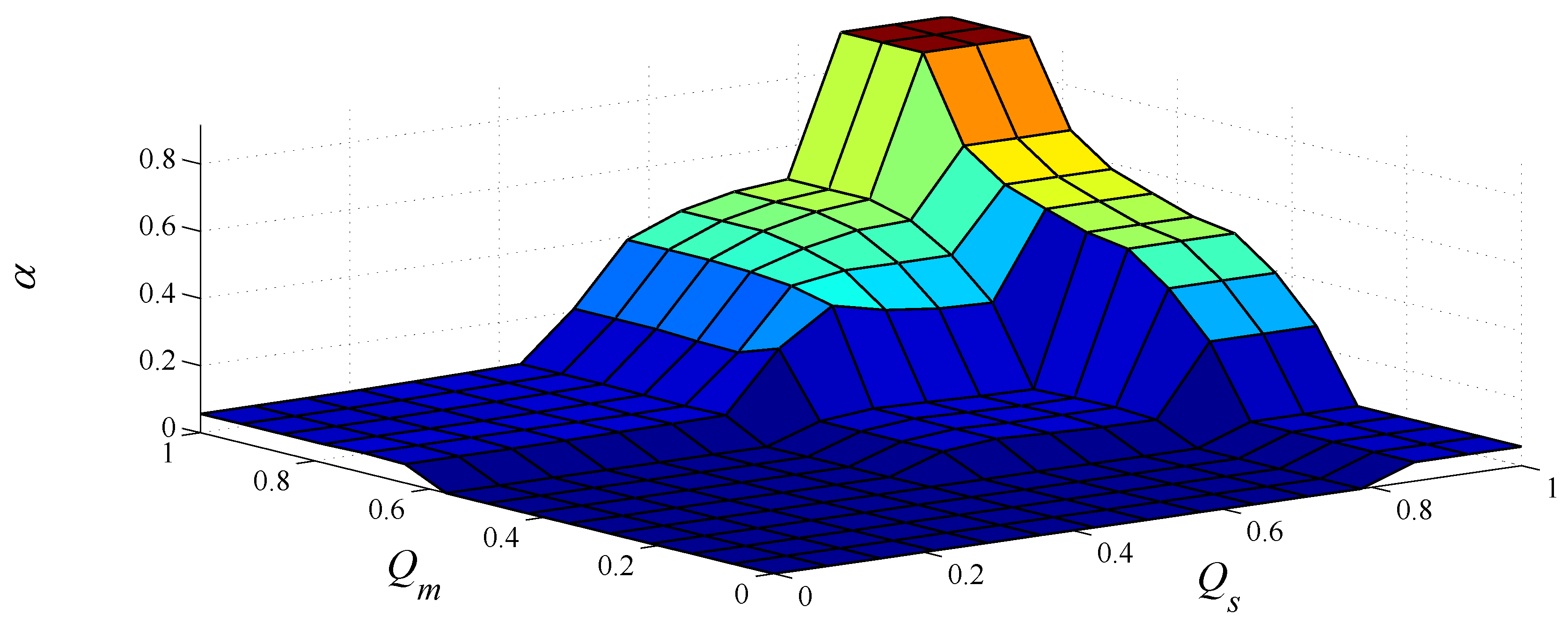
3. Moderator Design Using a Fuzzy Inference System
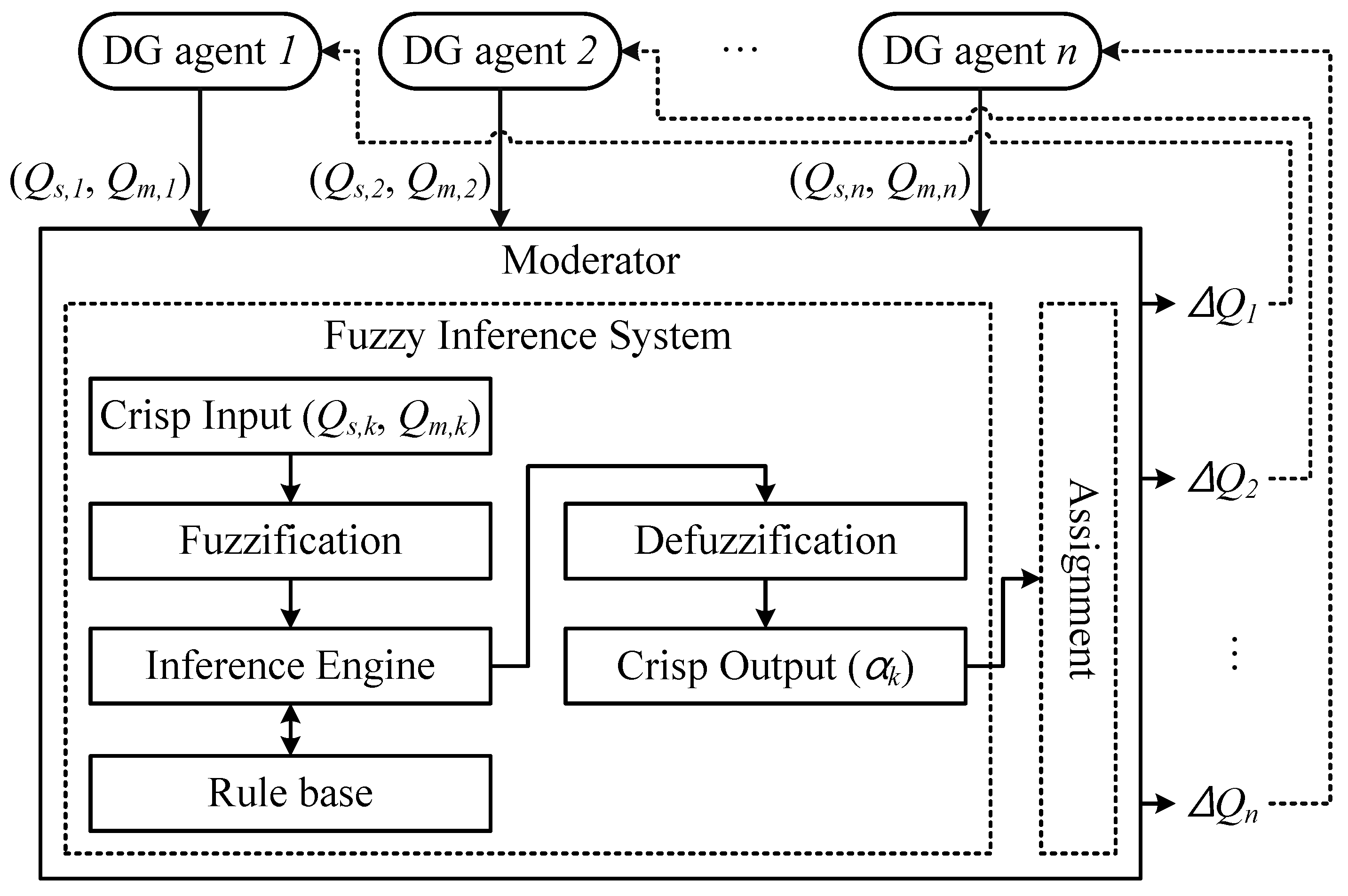
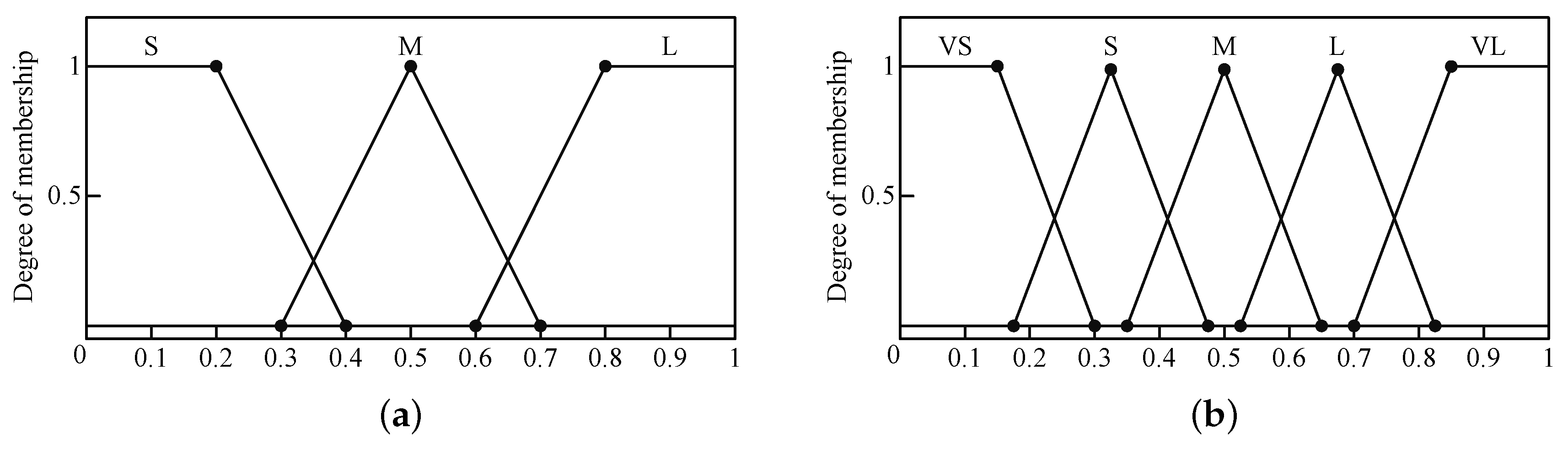
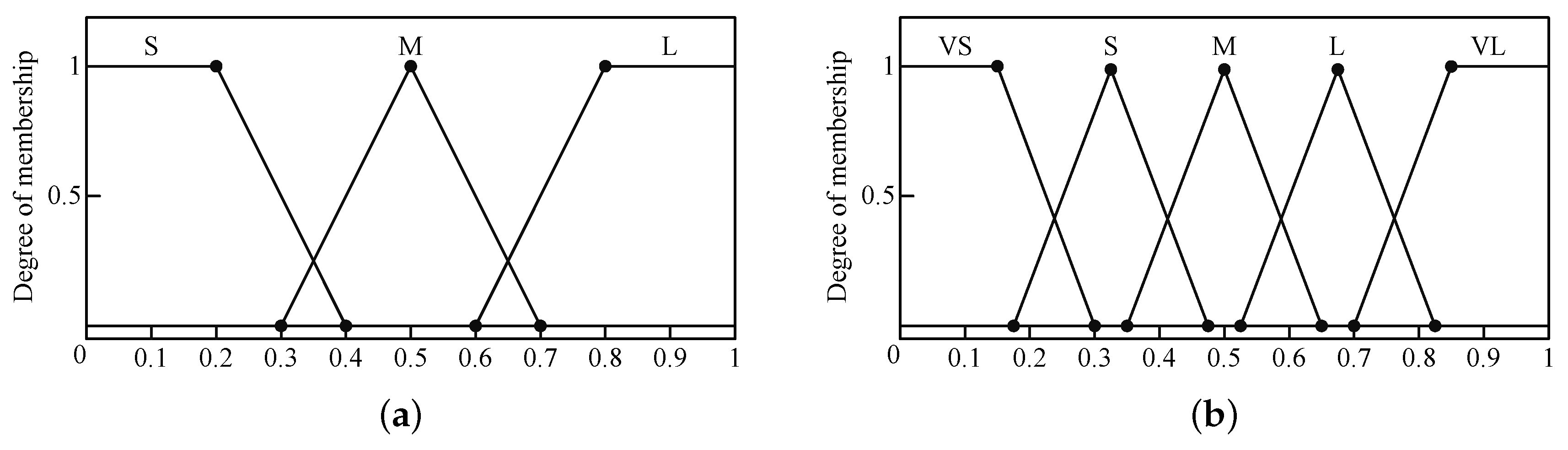
3.1. Fuzzification
3.2. Rule-Based Inference Engine

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S | M | L | |
|---|---|---|---|
| S | VS | S | M |
| M | S | M | L |
| L | M | L | VL |
3.3. Defuzzification
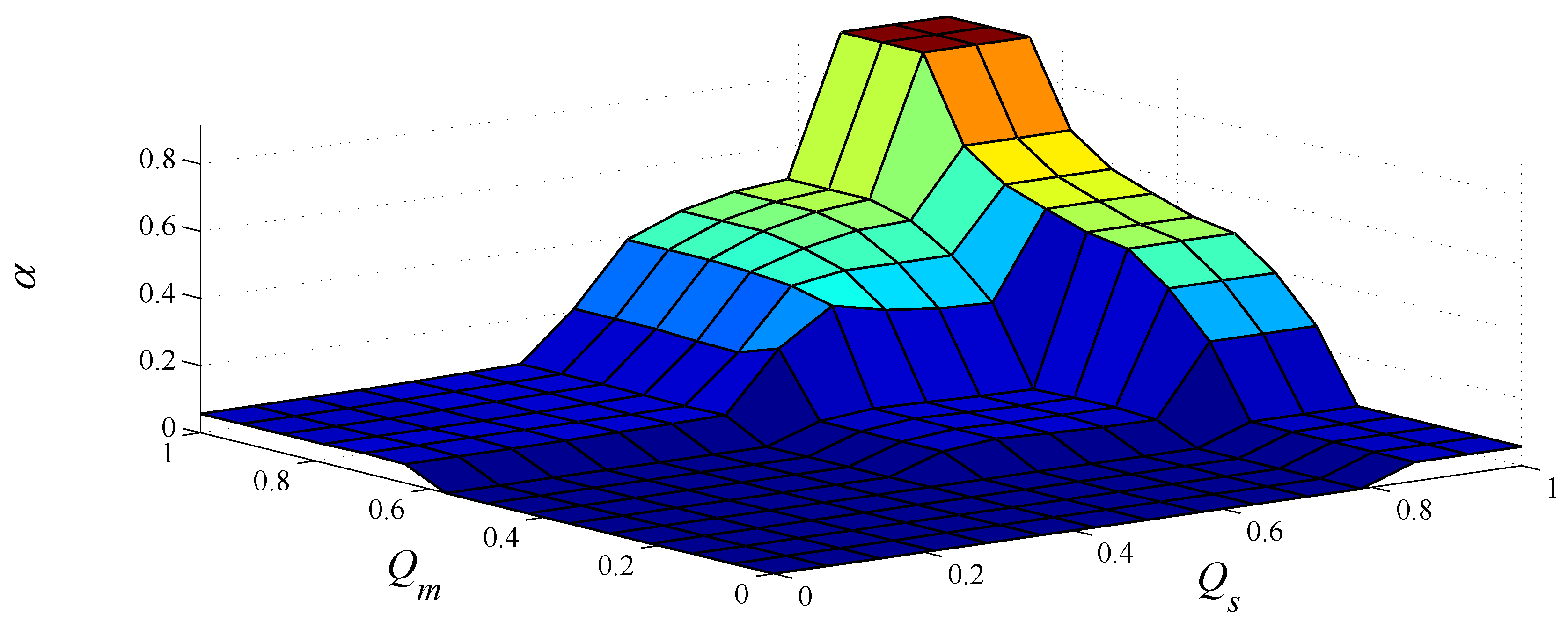
3.4. Output of the Moderator
4. Optimization of the Fuzzy Inference System Using Particle Swarm Optimization
4.1. Particle Swarm Optimization
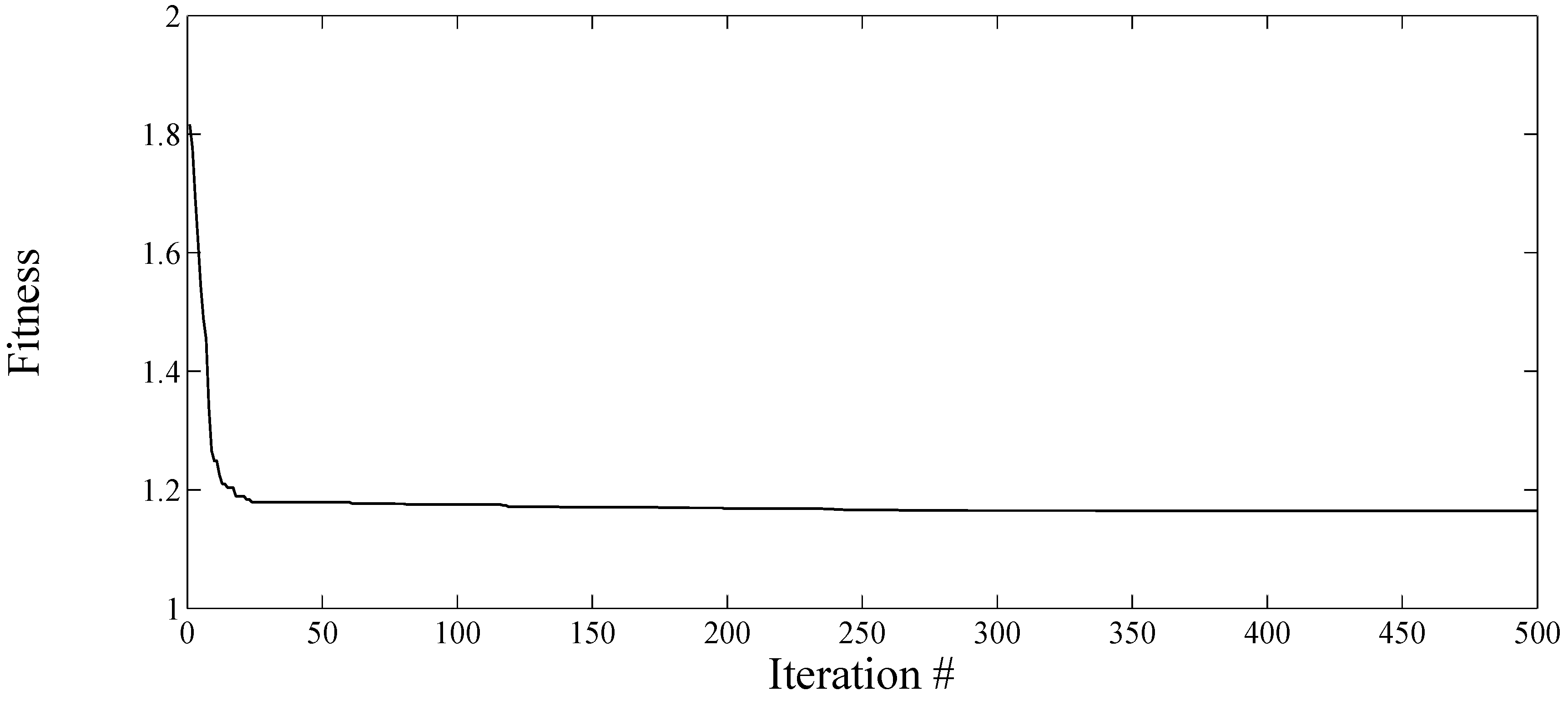
4.2. Optimization of the Fuzzy Inference System

5. Case Studies
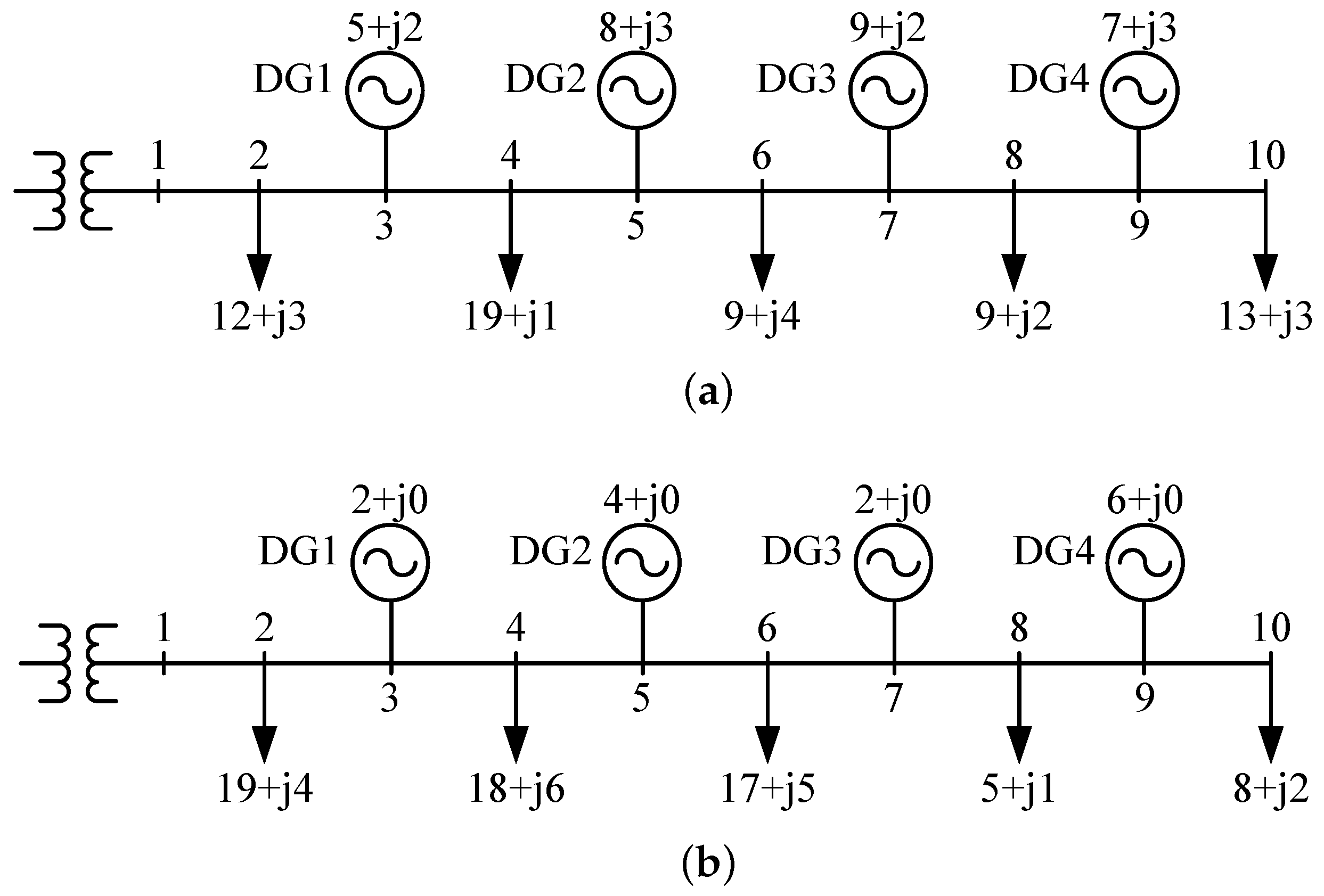
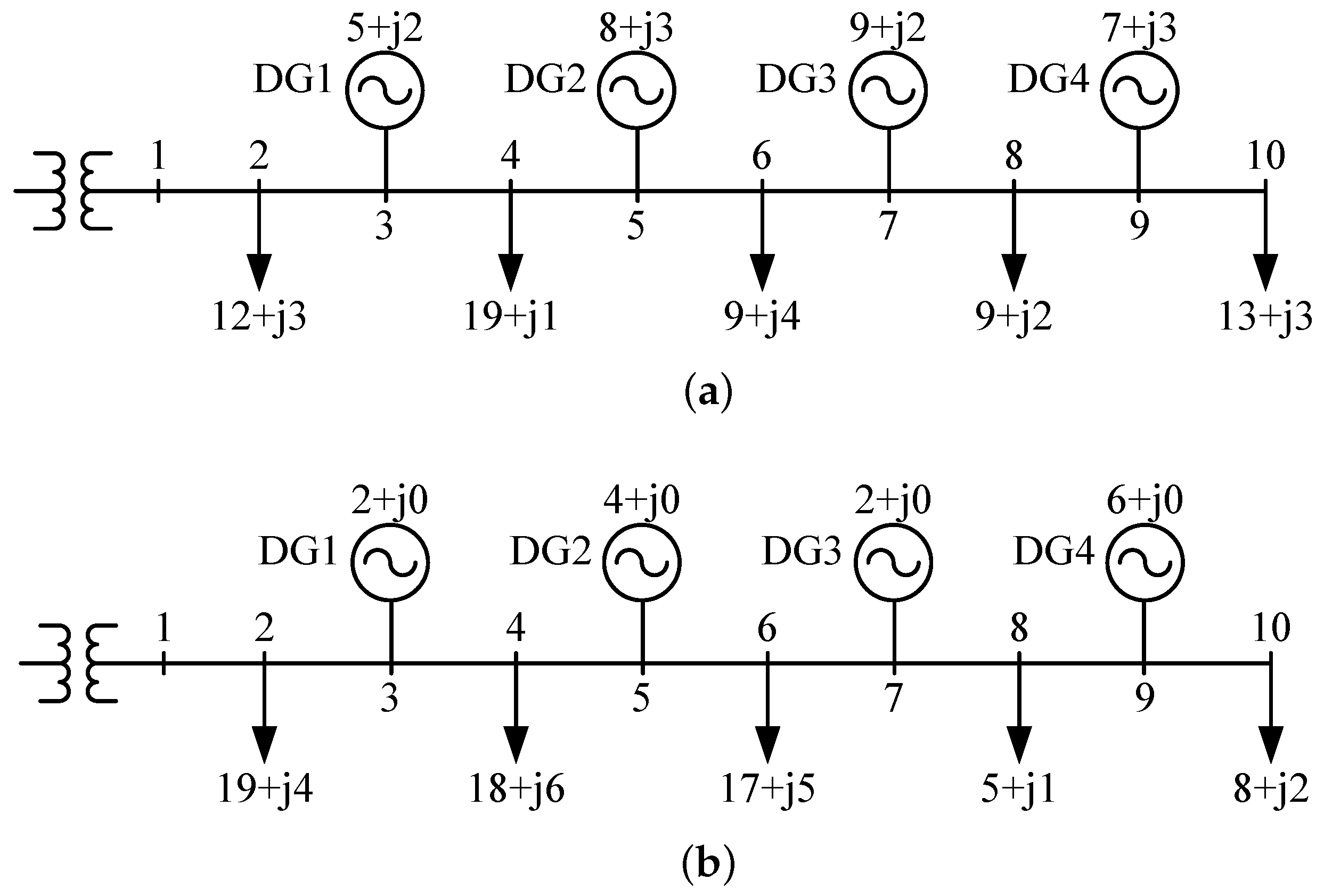
5.1. Test System and Simulation Conditions
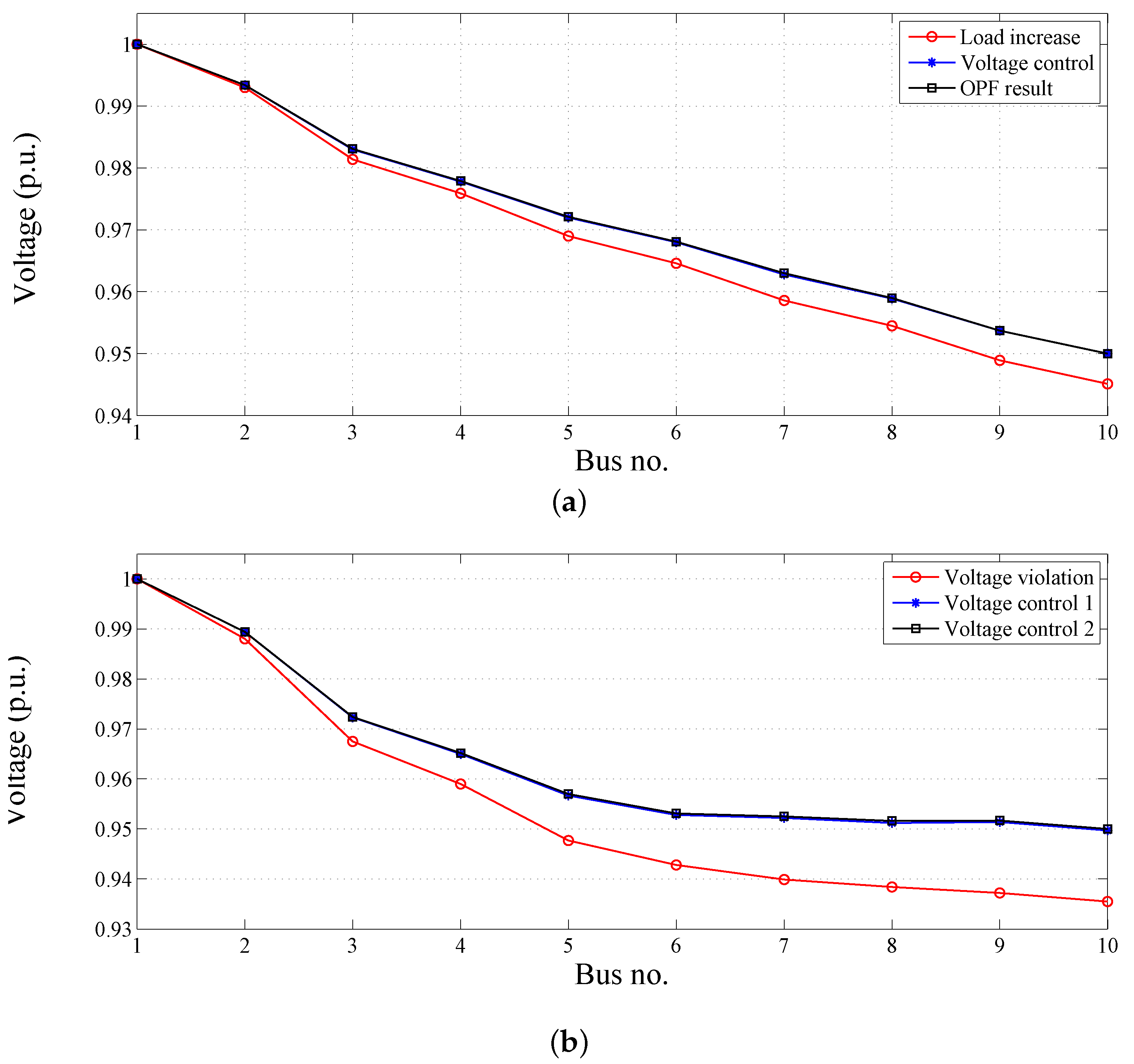
5.2. Simulation Results


| Unit | α | (kVar) | ||||
|---|---|---|---|---|---|---|
| DG agent 1 | 0.5034 | 0.75 | 0.2473 | 0.0578 | 0.0566 | 0.5454 |
| DG agent 2 | 1.0022 | 0.50 | 0.4972 | 0.0479 | 0.0469 | 0.2247 |
| DG agent 3 | 1.5245 | 0.75 | 0.7489 | 0.4347 | 0.4254 | 1.3547 |
| DG agent 4 | 2.0358 | 0.50 | 1 | 0.4816 | 0.4712 | 1.1238 |
| Unit | α | (kVar) | ||||
|---|---|---|---|---|---|---|
| First process | ||||||
| DG agent 1 | 0.5145 | 1 | 0.2483 | 0.0591 | 0.0350 | 0.9842 |
| DG agent 2 | 1.0383 | 1 | 0.5011 | 0.2153 | 0.1276 | 1.7777 |
| DG agent 3 | 1.5570 | 1 | 0.7515 | 0.4967 | 0.2944 | 2.7351 |
| DG agent 4 | 2.0718 | 1 | 1 | 0.9162 | 0.5430 | 3.7918 |
| Second process | ||||||
| DG agent 1 | 0.5006 | 0.7539 | 0.2533 | 0.0576 | 0.3327 | 0.2141 |
| DG agent 2 | 0.9994 | 0.5556 | 0.5057 | 0.0591 | 0.3415 | 0.1101 |
| DG agent 3 | 1.4877 | 0.3162 | 0.7527 | 0 | 0 | 0 |
| DG agent 4 | 1.9765 | 0.0521 | 1 | 0.0564 | 0.3258 | 0.0531 |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
Optimal Power Flow Using Sequential Quadratic Programming
References
- Pepermans, G.; Driesen, J.; Haeseldonckx, D.; Belmans, R.; D’haeseleer, W. Distributed generation: Definition, benefits and issues. Energy Policy 2005, 33, 787–798. [Google Scholar] [CrossRef]
- Ackermann, T.; Andersson, G.; Söder, L. Distributed generation: A definition. Electr. Power Syst. Res. 2001, 57, 195–204. [Google Scholar]
- Dugan, R.C.; Mcdermott, T.E. Distributed generation. IEEE Ind. Appl. Mag. 2002, 8, 19–25. [Google Scholar]
- Dugan, R.C.; McDermott, T.E.; Bal, G.J. Planning for distributed generation. IEEE Ind. Appl. Mag. 2001, 7, 80–88. [Google Scholar] [CrossRef]
- Mao, Y.; Miu, K. Switch placement to improve system reliability for radial distribution systems with distributed generation. IEEE Trans. Power Syst. 2003, 18, 1346–1352. [Google Scholar]
- Delfino, B. Modeling of the integration of distributed generation into the electrical system. In Proceedings of the Power Engineering Society Summer Meeting, Chicago, IL, USA, 25–25 July 2002; Volume 1, pp. 170–175.
- Ochoa, L.F.; Padilha-Feltrin, A.; Harrison, G.P. Evaluating distributed generation impacts with a multiobjective index. IEEE Trans. Power Deliv. 2006, 21, 1452–1458. [Google Scholar] [CrossRef]
- Walling, R.; Saint, R.; Dugan, R.C.; Burke, J.; Kojovic, L.A. Summary of distributed resources impact on power delivery systems. IEEE Trans. Power Deliv. 2008, 23, 1636–1644. [Google Scholar] [CrossRef]
- Barker, P.P.; De Mello, R.W. Determining the impact of distributed generation on power systems. I. Radial distribution systems. In Proceedings of the Power Engineering Society Summer Meeting, Seattle, WA, USA, 16–20 July 2000; Volume 3, pp. 1645–1656.
- Std, ANSI C84. 1-2011. American National Standard For Electric Power Systems and Equipment-Voltage Ratings (60 Hertz). 2011. Avaliable online: https://www.nema.org/Standards/ComplimentaryDocuments/Contents-and-Scope-ANSI-C84-1-2011.pdf (accessed on 20 September 2015 ).
- Kersting, W.H. Distribution System Modeling and Analysis; Chemical Rubber Company (CRC) Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Dai, C.; Baghzouz, Y. On the voltage profile of distribution feeders with distributed generation. In Proceedings of the Power Engineering Society General Meeting, Toronto, ON, Canada, 13–17 July 2003; Volume 2.
- Masters, C. Voltage rise: The big issue when connecting embedded generation to long 11 kV overhead lines. Power Eng. J. 2002, 16, 5–12. [Google Scholar] [CrossRef]
- Carvalho, P.; Correia, P.F.; Ferreira, L.A. Distributed reactive power generation control for voltage rise mitigation in distribution networks. IEEE Trans. Power Syst. 2008, 23, 766–772. [Google Scholar] [CrossRef]
- Hashim, T.T.; Mohamed, A.; Shareef, H. A Review on Voltage Control Methods for Active Distribution Networks; Przeglad Elektrotechniczny (Electrical Review): Warszawa, Poland, 2012; pp. 304–312. Available online: http://www.red.pe.org.pl/articles/2012/6/71.pdf (accessed on 20 September 2015).
- Tonkoski, R.; Lopes, L.A.; El-Fouly, T.H. Coordinated active power curtailment of grid connected PV inverters for overvoltage prevention. IEEE Trans. Sustain. Energy 2011, 2, 139–147. [Google Scholar] [CrossRef]
- Viawan, F.; Karlsson, D. Combined local and remote voltage and reactive power control in the presence of induction machine distributed generation. IEEE Trans. Power Syst. 2007, 22, 2003–2012. [Google Scholar] [CrossRef]
- McArthur, S.D.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-agent systems for power engineering applications—Part I: Concepts, approaches, and technical challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- Rehtanz, C. Autonomous Systems and Intelligent Agents in Power System Control and Operation; Springer-Verlag: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Wooldridge, M. An Introduction to Multiagent Systems; John Wiley & Sons: Chichester, West Sussex, UK, 2009. [Google Scholar]
- Baran, M.E.; El-Markabi, I.M. A multiagent-based dispatching scheme for distributed generators for voltage support on distribution feeders. IEEE Trans. Power Syst. 2007, 22, 52–59. [Google Scholar] [CrossRef]
- Elkhatib, M.E.; El-Shatshat, R.; Salama, M. Novel coordinated voltage control for smart distribution networks with DG. IEEE Trans. Smart Grid 2011, 2, 598–605. [Google Scholar] [CrossRef]
- Farag, H.E.; El-Saadany, E.F. A novel cooperative protocol for distributed voltage control in active distribution systems. IEEE Trans. Power Syst. 2013, 28, 1645–1656. [Google Scholar] [CrossRef]
- Spatti, D.H.; Da Silva, I.N.; Usida, W.F.; Flauzino, R.A. Real-time voltage regulation in power distribution system using fuzzy control. IEEE Trans. Power Deliv. 2010, 25, 1112–1123. [Google Scholar] [CrossRef]
- Liang, R.H.; Wang, Y.S. Fuzzy-based reactive power and voltage control in a distribution system. IEEE Trans. Power Deliv. 2003, 18, 610–618. [Google Scholar] [CrossRef]
- Miranda, V.; Moreira, A.; Pereira, J. An improved fuzzy inference system for voltage/VAR control. IEEE Trans. Power Syst. 2007, 22, 2013–2020. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Yousef, H. Adaptive fuzzy control based on output feedback for synchronization of distributed power generators. In Proceedings of the 3rd International Symposium on Energy Chanllenfes and Mechanics (ECM 2015), Aberdeen, UK, 7–9 July 2015.
- Tomescu, M.L.; Preitl, S.; Precup, R.E.; Tar, J.K. Stability analysis method for fuzzy control systems dedicated controlling nonlinear processes. Acta Polytech. Hung. 2007, 4, 127–141. [Google Scholar]
- Liu, J.; Liu, H.; Shen, W. Stability analysis of particle swarm optimization. In Advanced Intelligent Computing Theories and Applications. With Aspects of Artificial Intelligence; Springer-Verlag: Berlin/Heidelberg, Germany, 2007; pp. 781–790. [Google Scholar]
- Moreau, L. Stability of multiagent systems with time-dependent communication links. IEEE Trans. Autom. Control 2005, 50, 169–182. [Google Scholar] [CrossRef]
- Oh, S.; Yoo, C.; Chung, I.; Won, D. Hardware-in-the-loop simulation of distributed intelligent energy management system for microgrids. Energies 2013, 6, 3263–3283. [Google Scholar] [CrossRef]
- Smith, R.G. The contract net protocol: High-level communication and control in a distributed problem solver. IEEE Trans. Comput. 1980, 29, 1104–1113. [Google Scholar] [CrossRef]
- Alibhai, Z. What is Contract Net Interaction Protocol? Intelligent Robotics and Manufacturing Systems (IRMS) Laboratory, Simon Fraser University: Vancouver, BC, Canada, 2003. [Google Scholar]
- Ross, T.J. Fuzzy Logic with Engineering Applications, 3rd ed.; John Wiley & Sons: Chichester, West Sussex, UK, 2009. [Google Scholar]
- Negnevitsky, M. Artificial Intelligence: A Guide to Intelligent Systems; Pearson Education: Harlow, Essex, UK, 2005. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Network, Piscataway, NJ, USA, 1995; pp. 1942–1948.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, H.-K.; Chung, I.-Y.; Moon, S.-I. Voltage Control Method Using Distributed Generators Based on a Multi-Agent System. Energies 2015, 8, 14009-14025. https://doi.org/10.3390/en81212411
Kang H-K, Chung I-Y, Moon S-I. Voltage Control Method Using Distributed Generators Based on a Multi-Agent System. Energies. 2015; 8(12):14009-14025. https://doi.org/10.3390/en81212411
Chicago/Turabian StyleKang, Hyun-Koo, Il-Yop Chung, and Seung-Il Moon. 2015. "Voltage Control Method Using Distributed Generators Based on a Multi-Agent System" Energies 8, no. 12: 14009-14025. https://doi.org/10.3390/en81212411