Optimization of Experimental Model Parameter Identification for Energy Storage Systems

Abstract
:1. Introduction
2. The Battery Model
2.1. Factors Affecting Battery Models
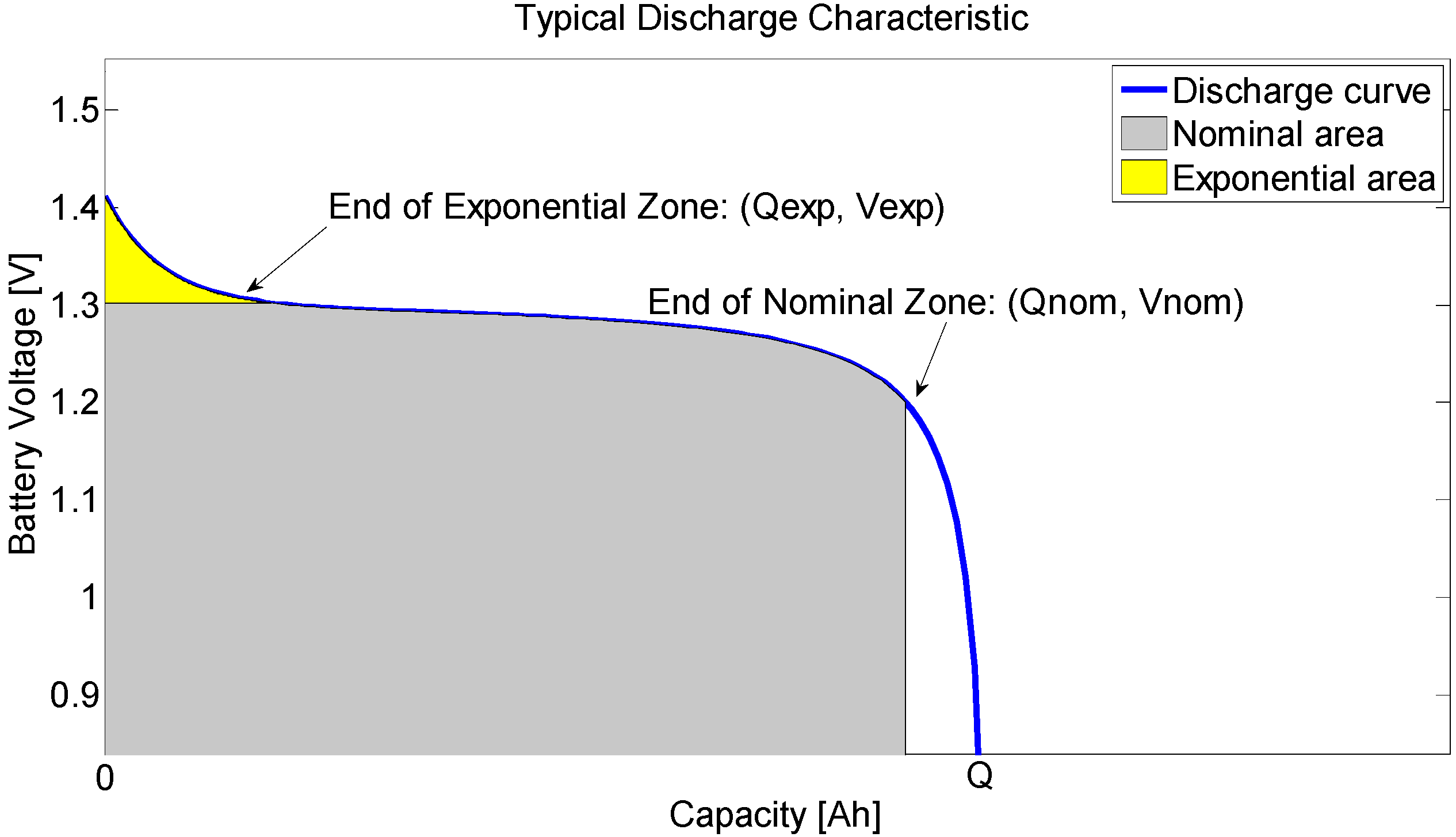
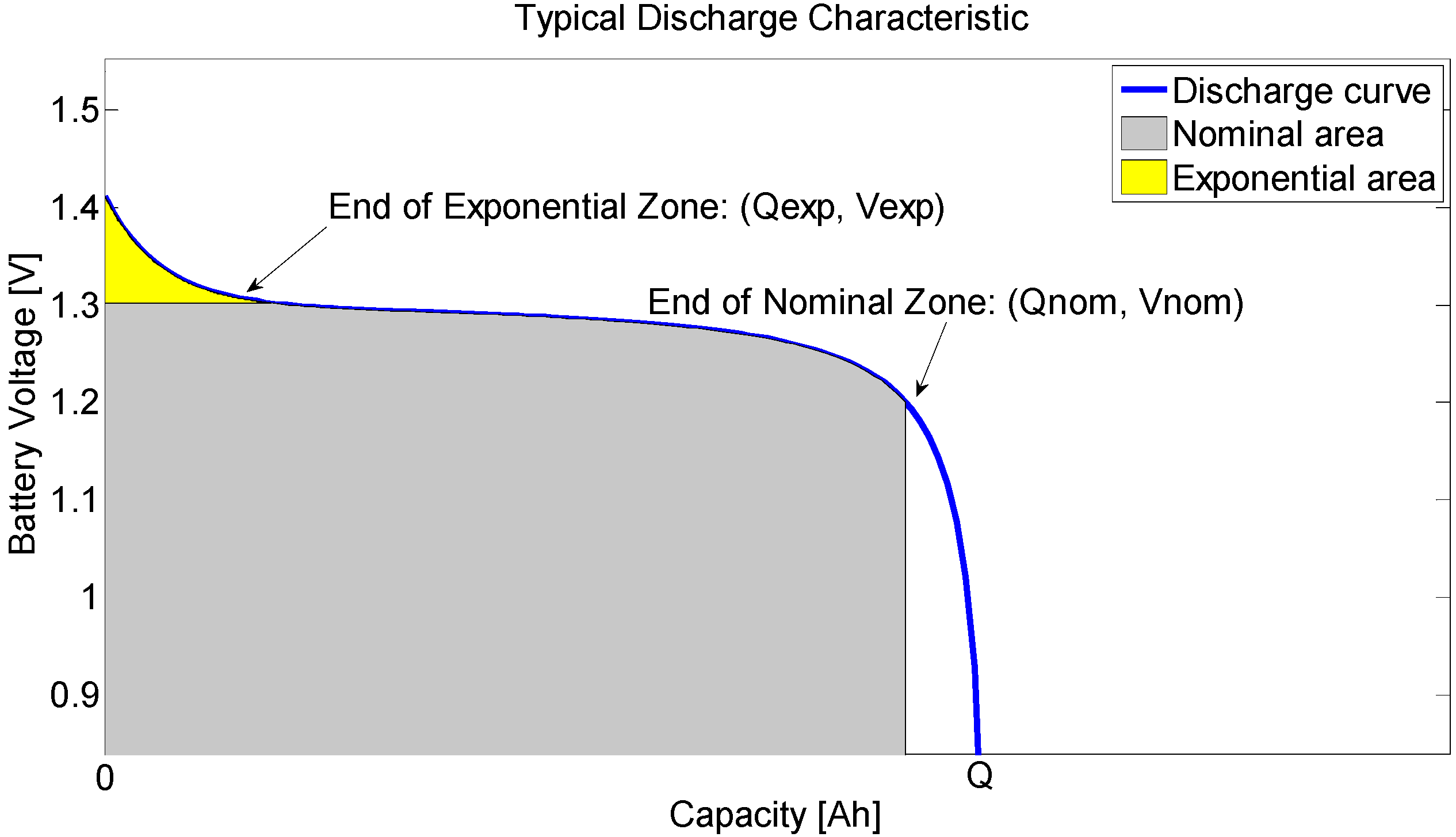
2.2. The Discharge Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Description |
|---|---|
| Battery voltage during discharge process [V] | |
| Battery constant voltage [V] | |
| Polarization constant [V/Ah] or Polarization resistance [Ω] | |
| Battery capacity [Ah] | |
| Actual battery charge [Ah] | |
| Exponential zone amplitude [V] | |
| Filtered current [A] | |
| Exponential zone time constant inverse [Ah]−1 | |
| Internal resistance [Ω] | |
| Battery current [A] |

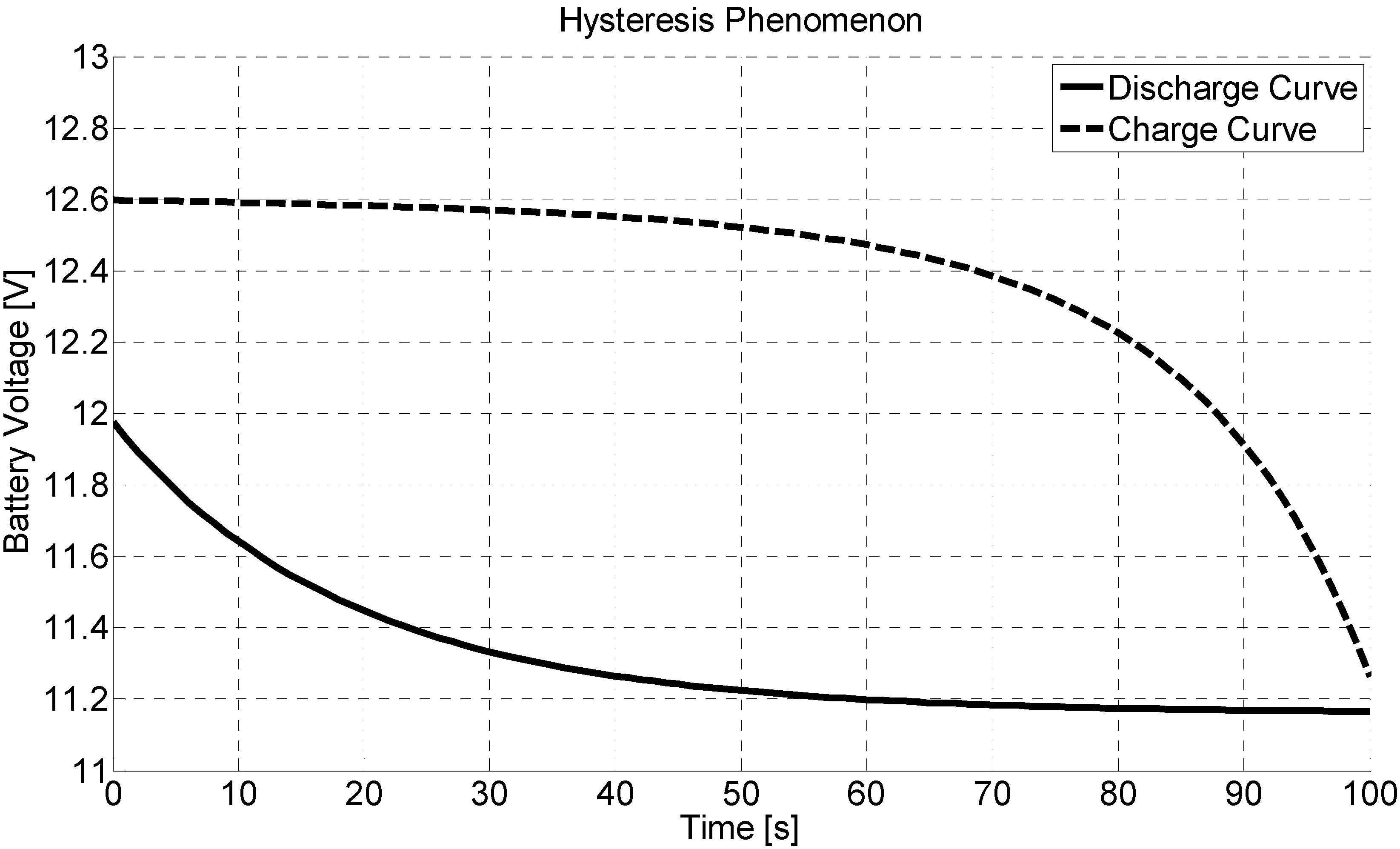
2.3. The Charge Model
| Lead-Acid | Discharge | |
| Charge | ||
| Li-Ion | Discharge | |
| Charge | ||
| NiMH and NiCd | Discharge | |
| Charge |
3. Model Parameter Identification
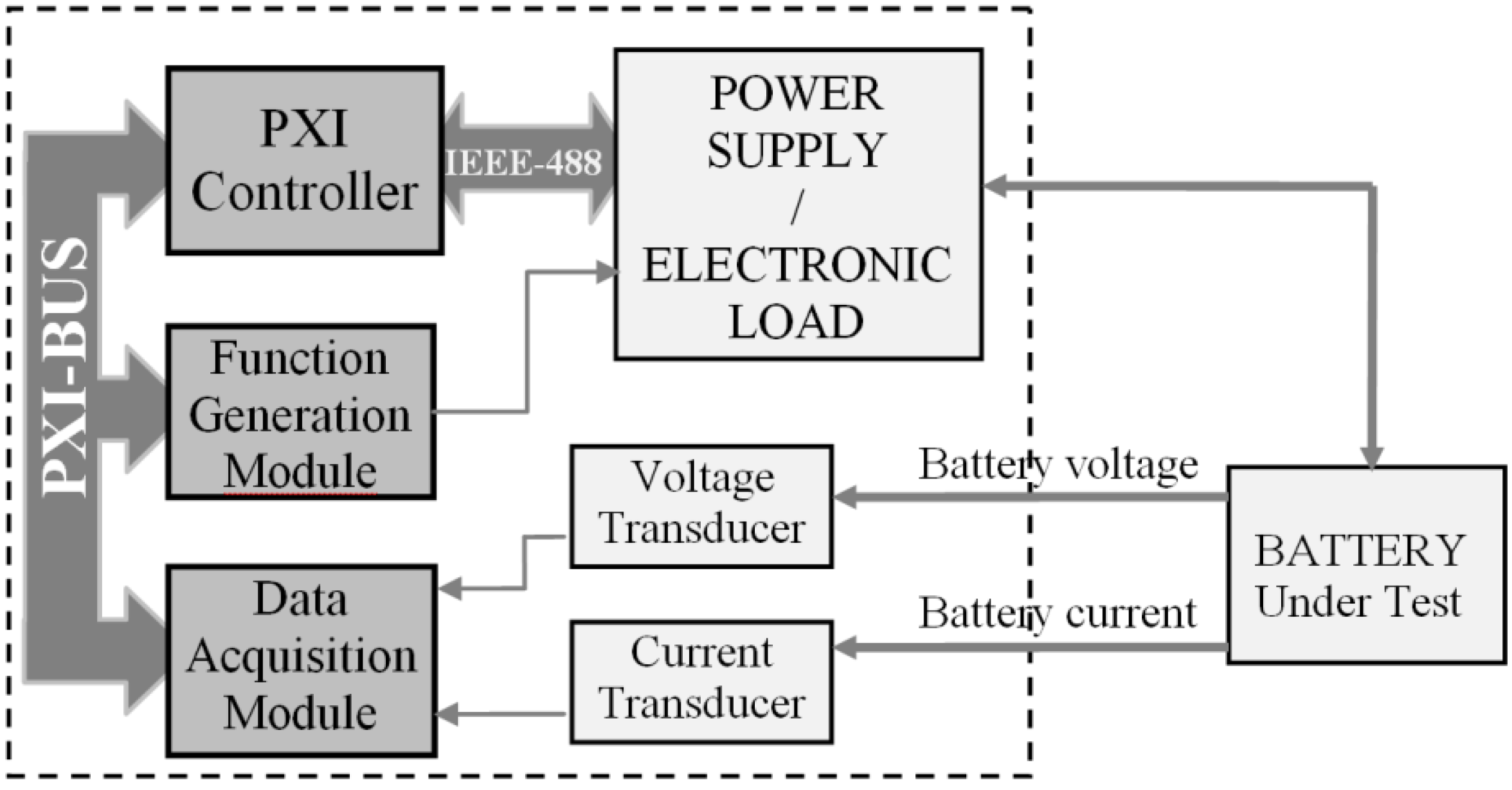
3.1. Automated Measurement Station

3.2. Optimization Procedure
| Quantity | Simplified procedure | Proposed procedure |
|---|---|---|
| [Ah] | 27.40 | 27.40 |
| [V] | 12.70 | 12.44 |
| [mΩ] | 50.00 | 81.30 |
| [Ω]-[V/Ah] | 0.085 | 0.016 |
| [s] | 30.00 | 19.31 |
| [s−1] | 15.73 | 112.37 |
| [V] | 0.52 | 0.17 |
- equality and inequality constraints;
- bounds on variable values.
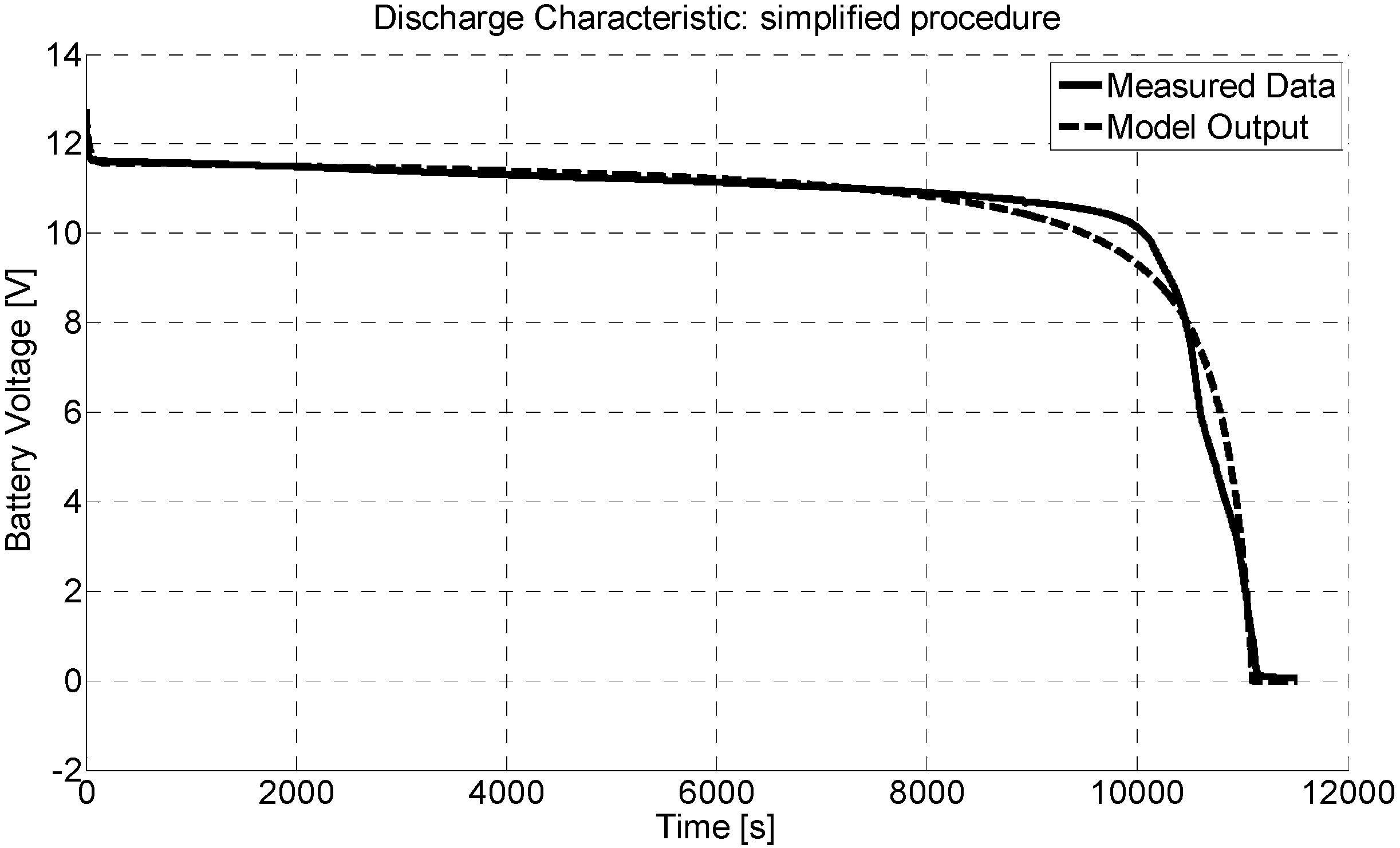
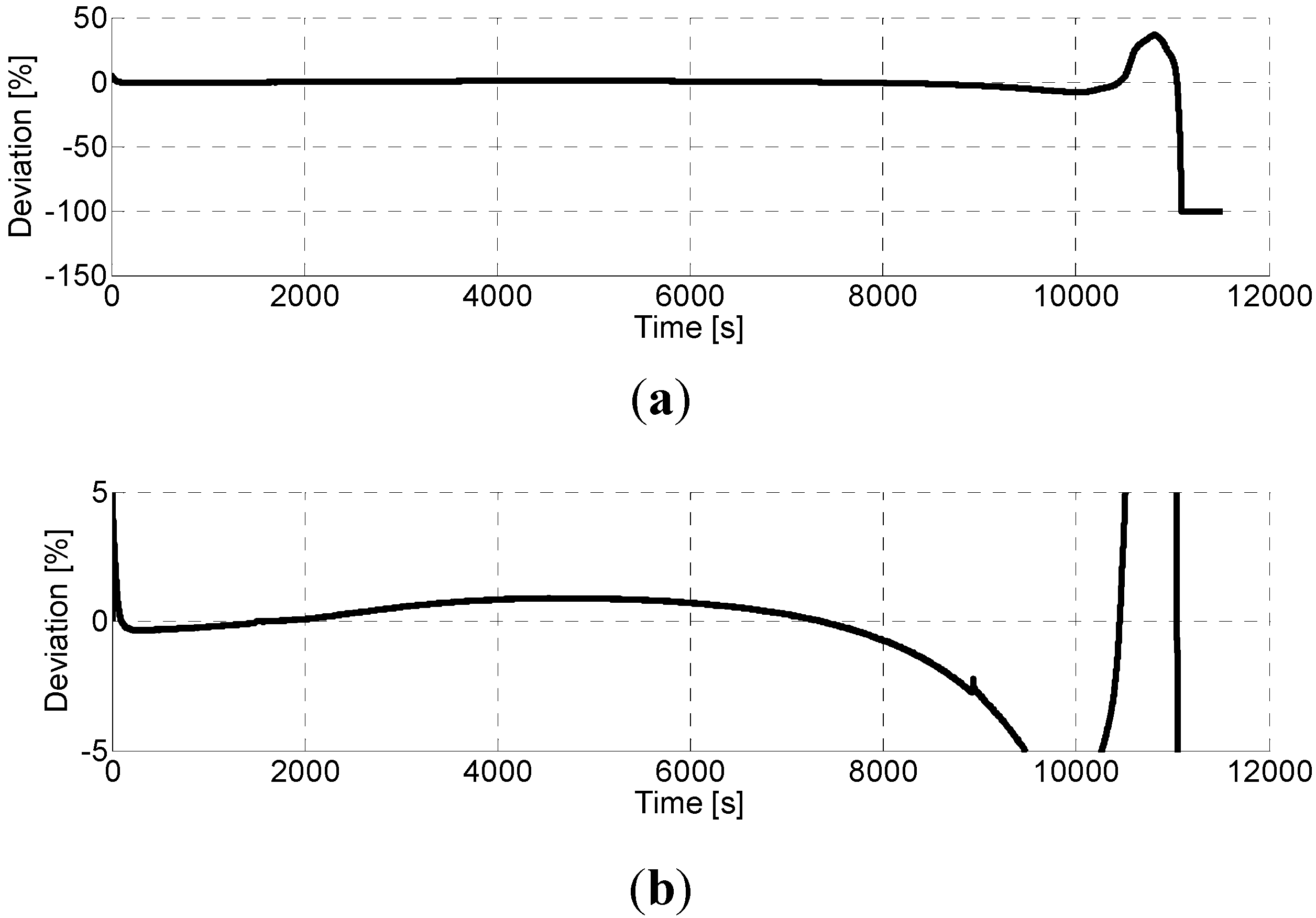
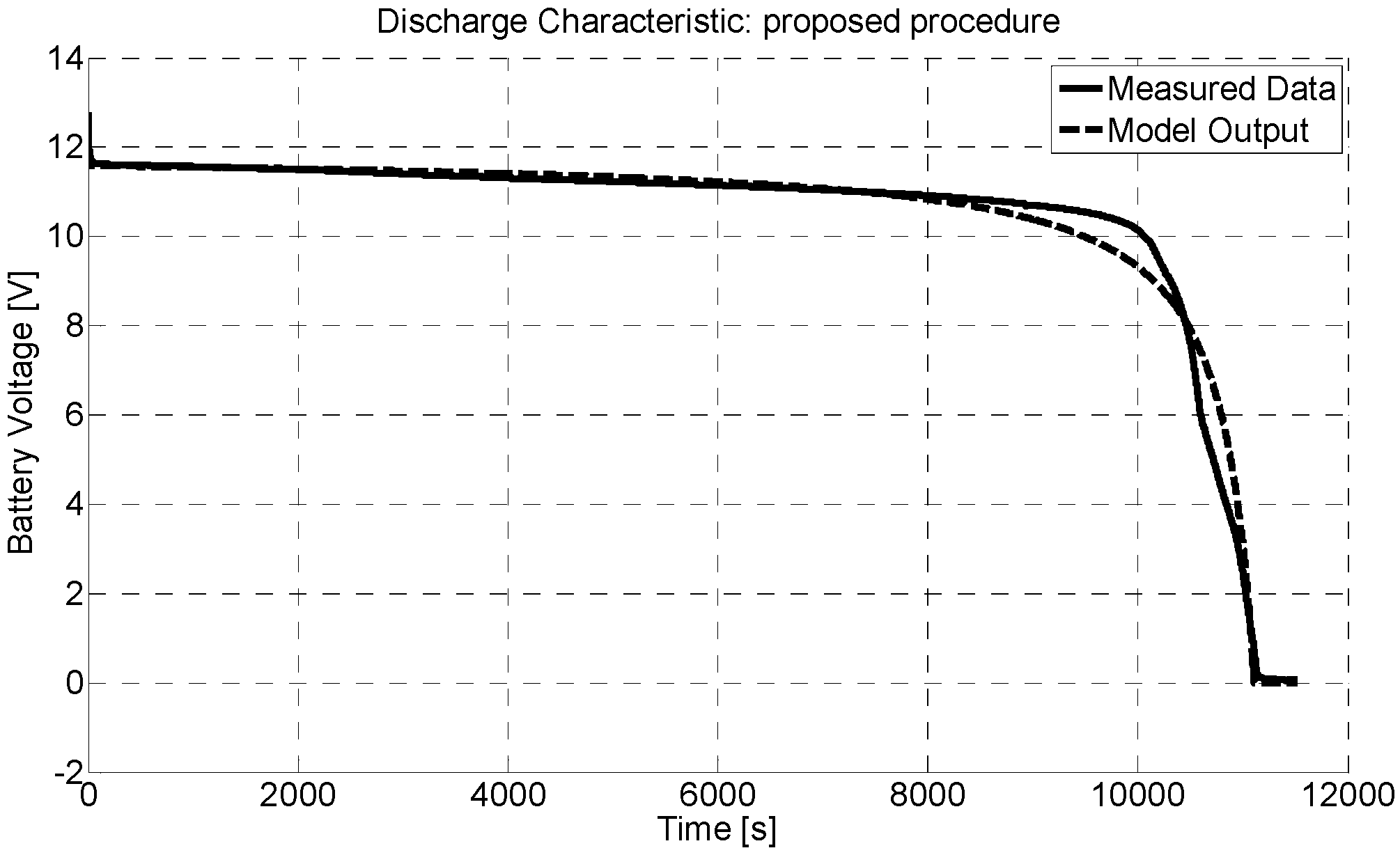
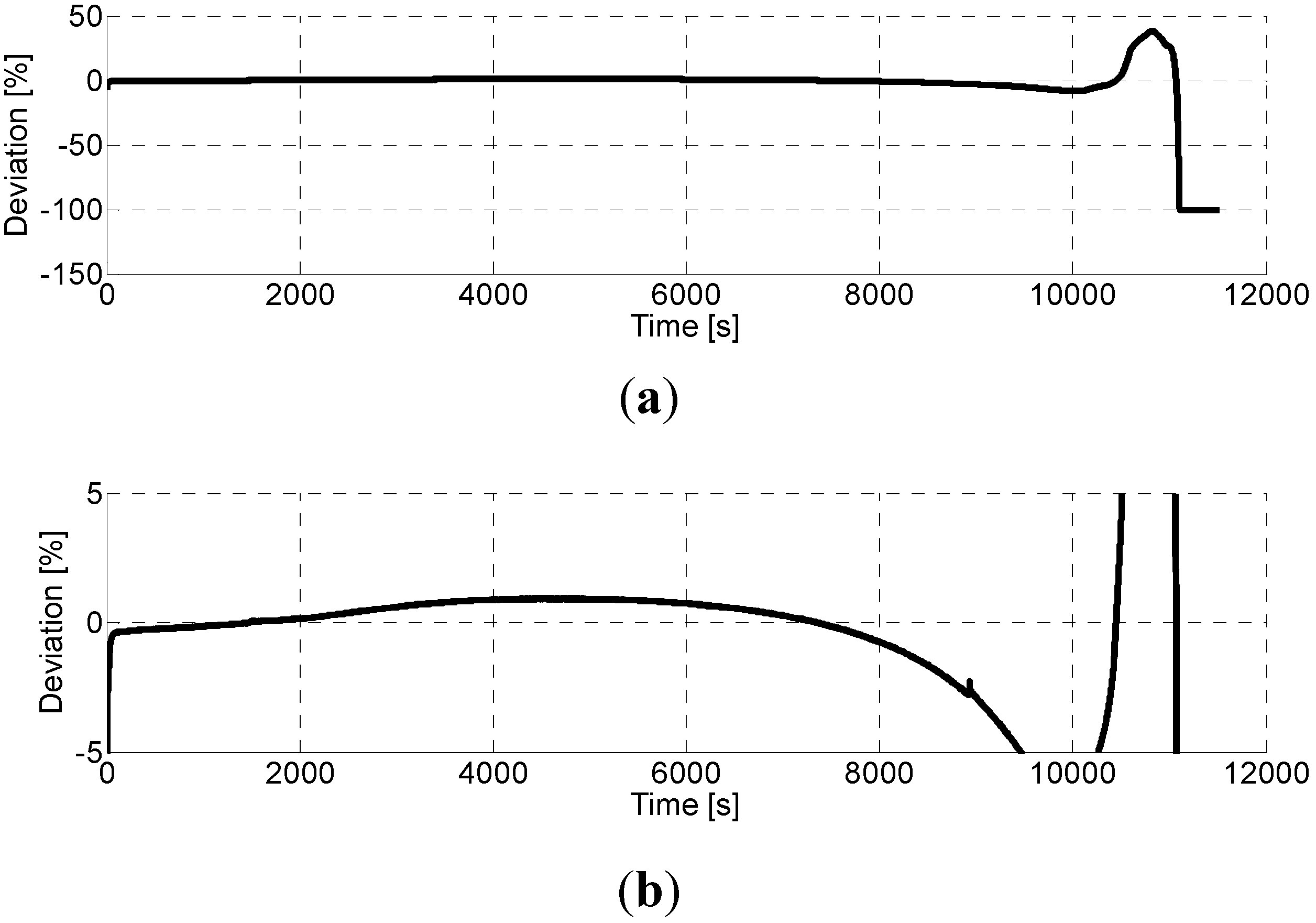
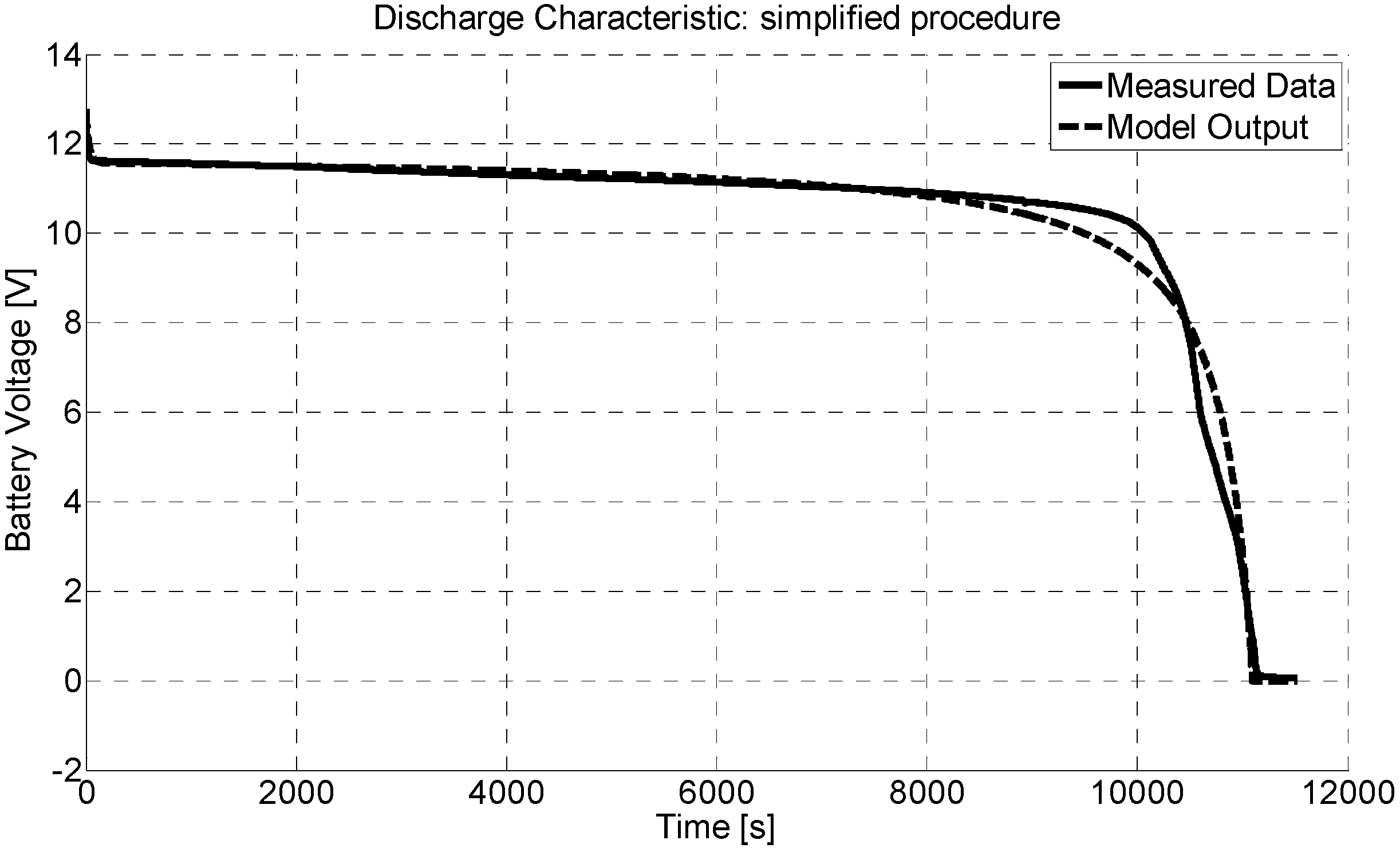
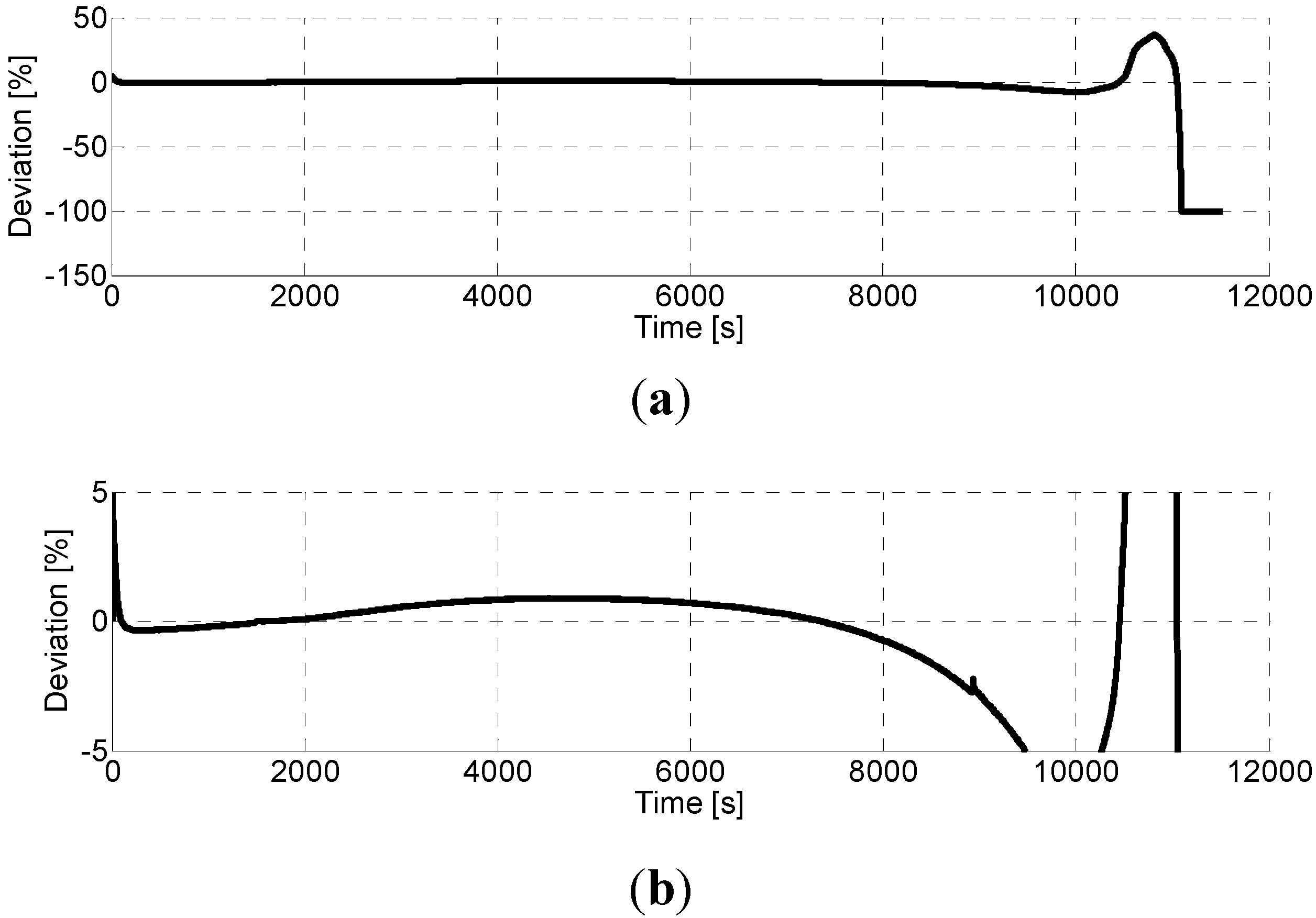
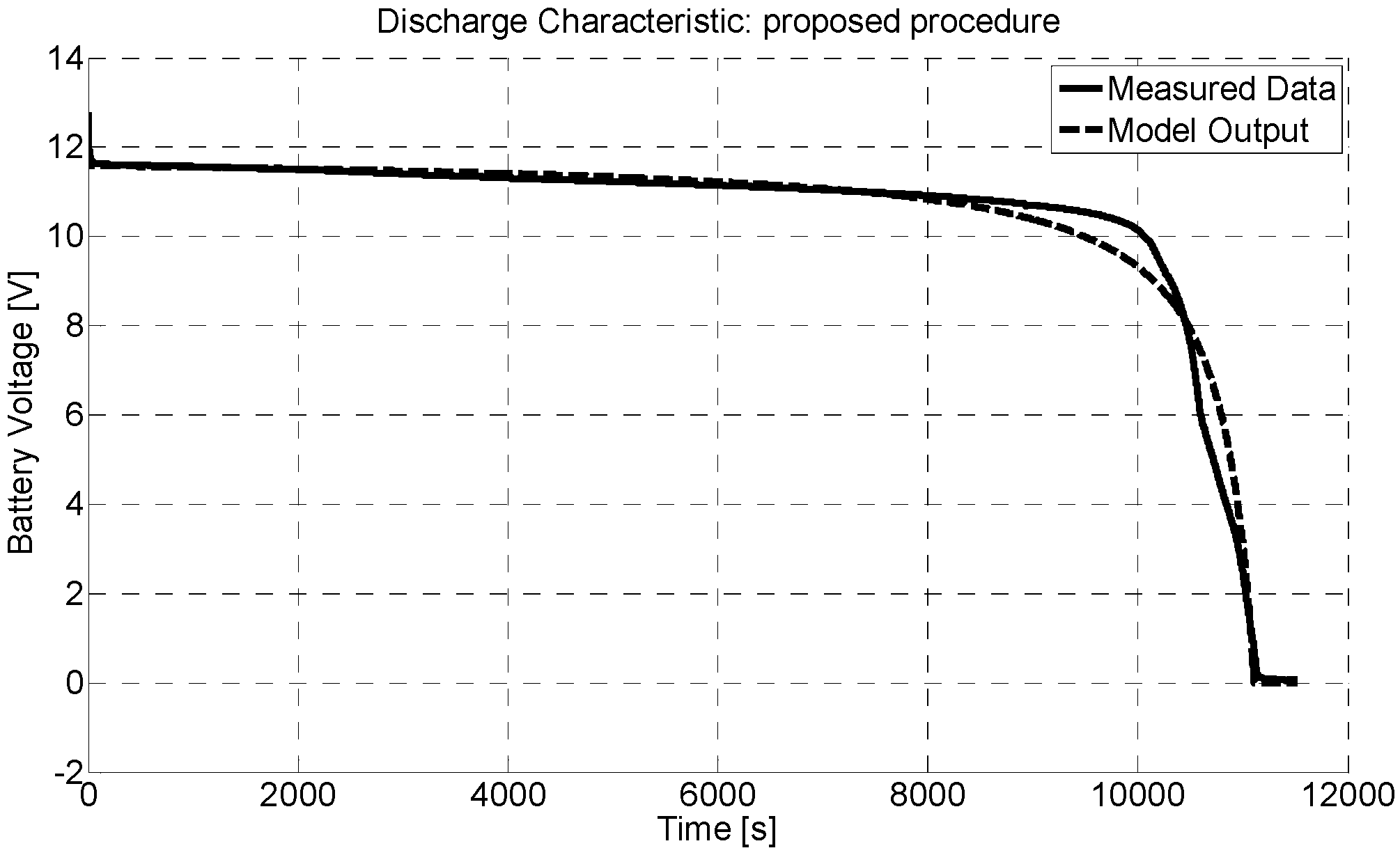
4. Experimental Results
- assigning a value for internal resistance , evaluating it from an experimental test;
- evaluating values for from experimental discharge curve (as illustrated in Figure 1) and extracting from them ;
- calculating the values of the two remaining parameters, and , from two other points of the experimental discharge curve in the nominal zone.
4.1. Experimental Validation in Static Conditions

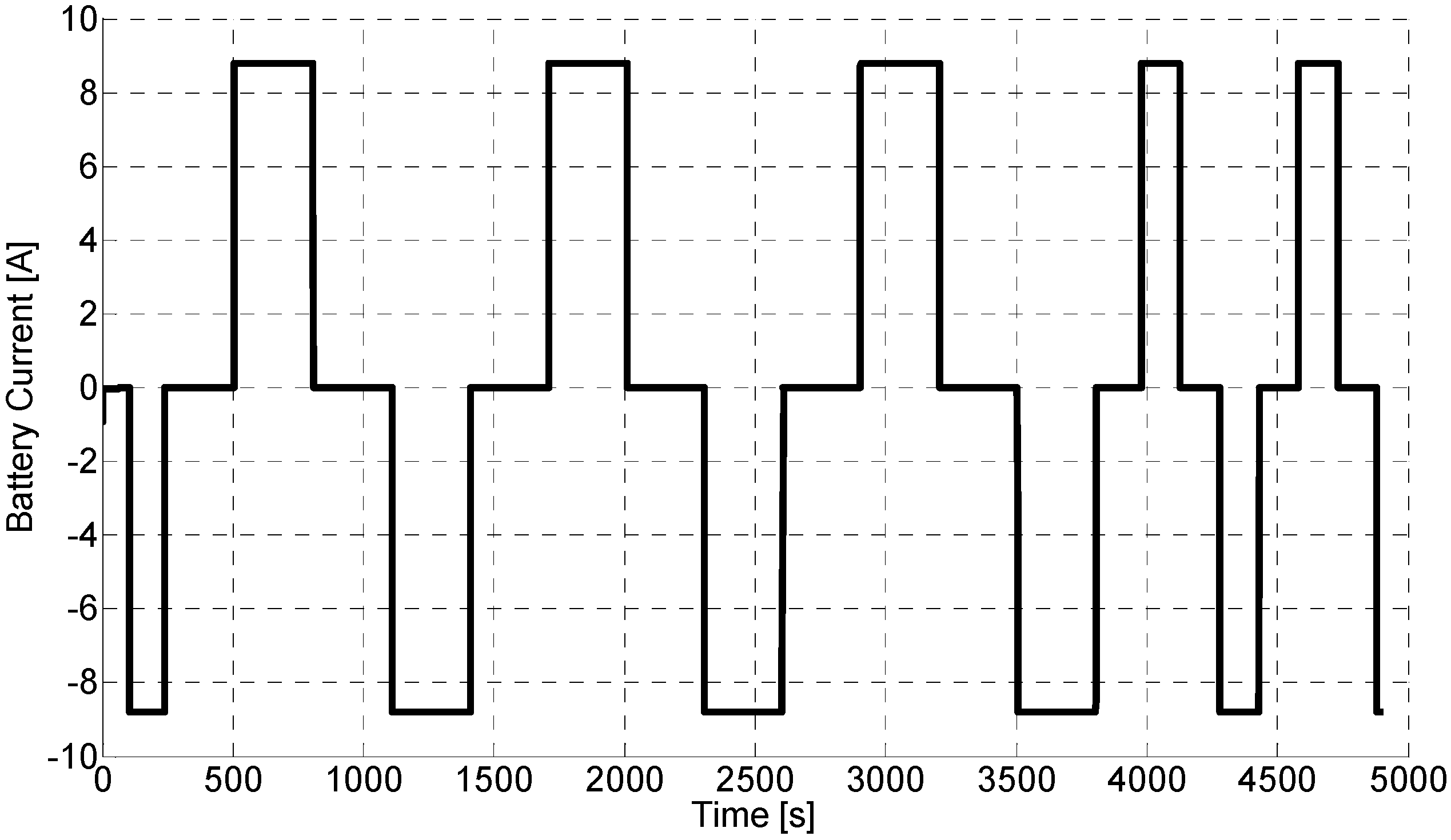
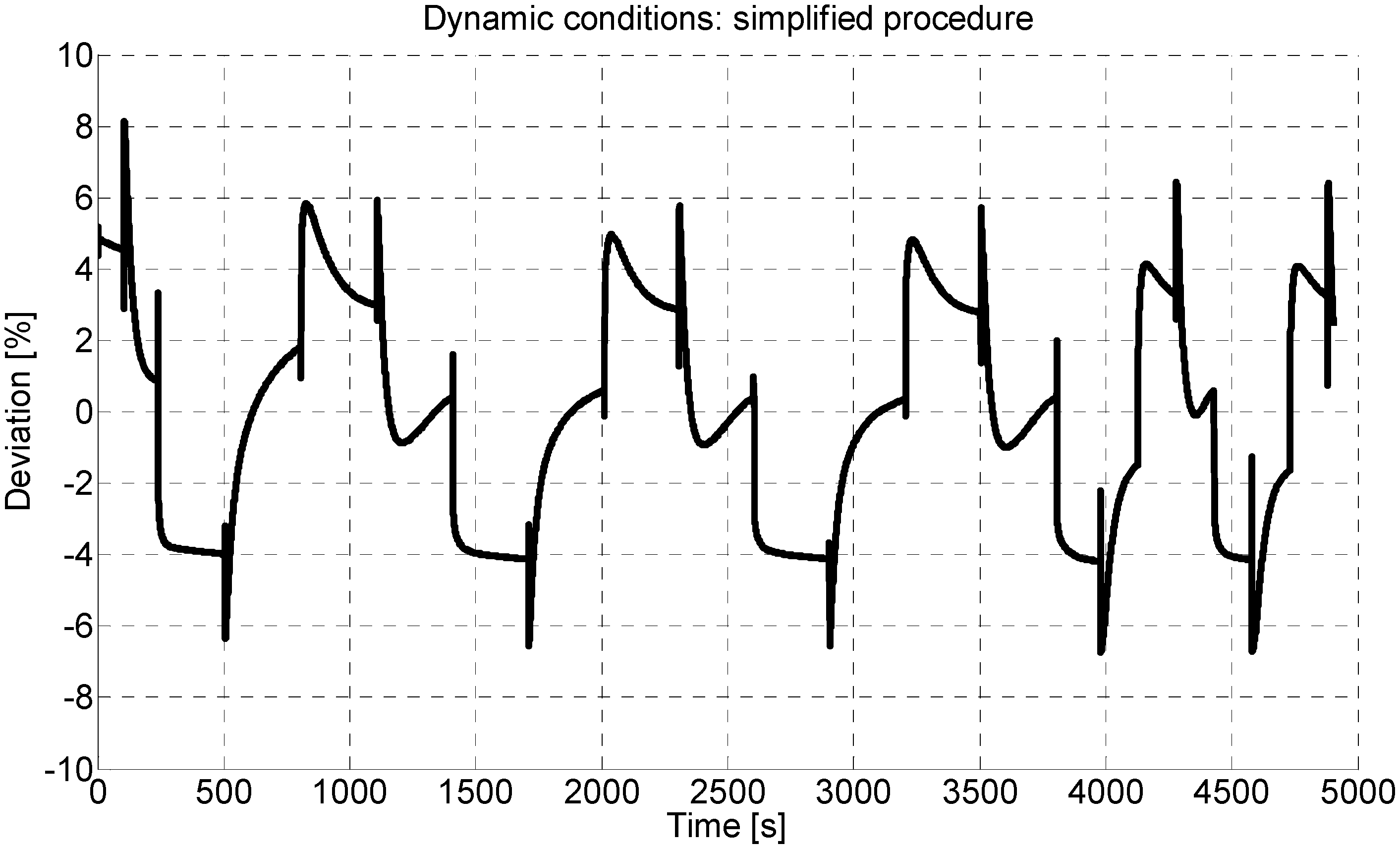
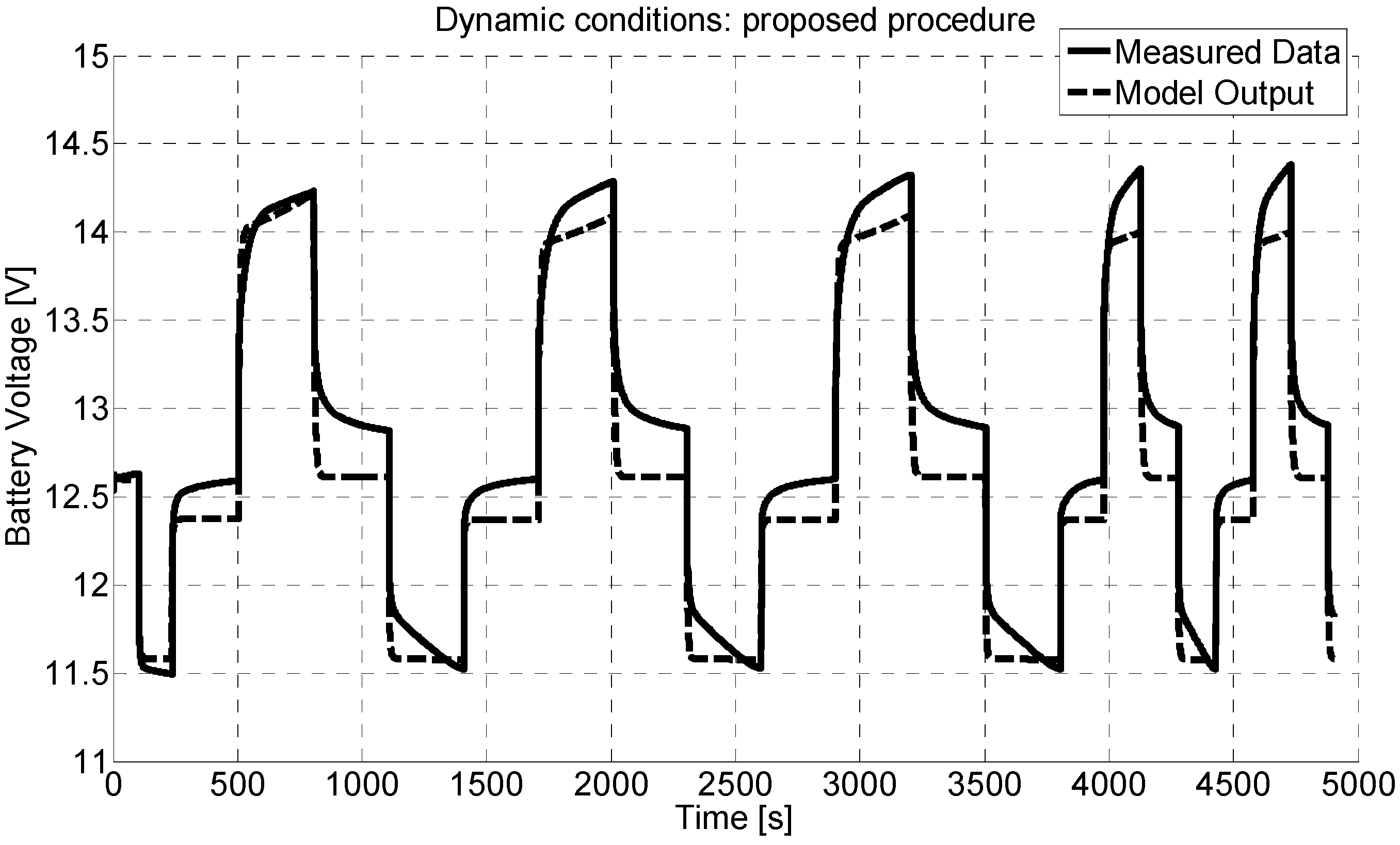
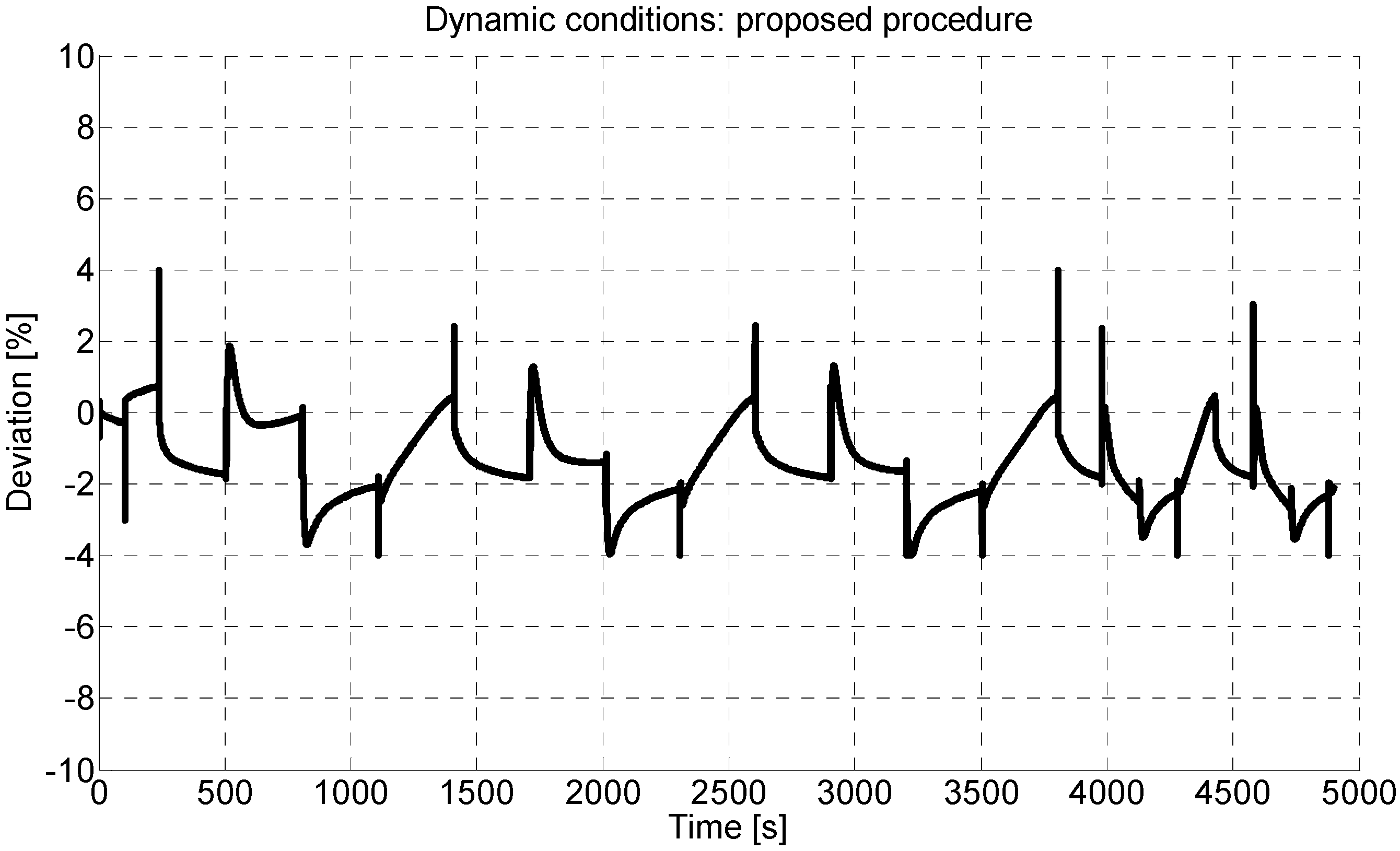
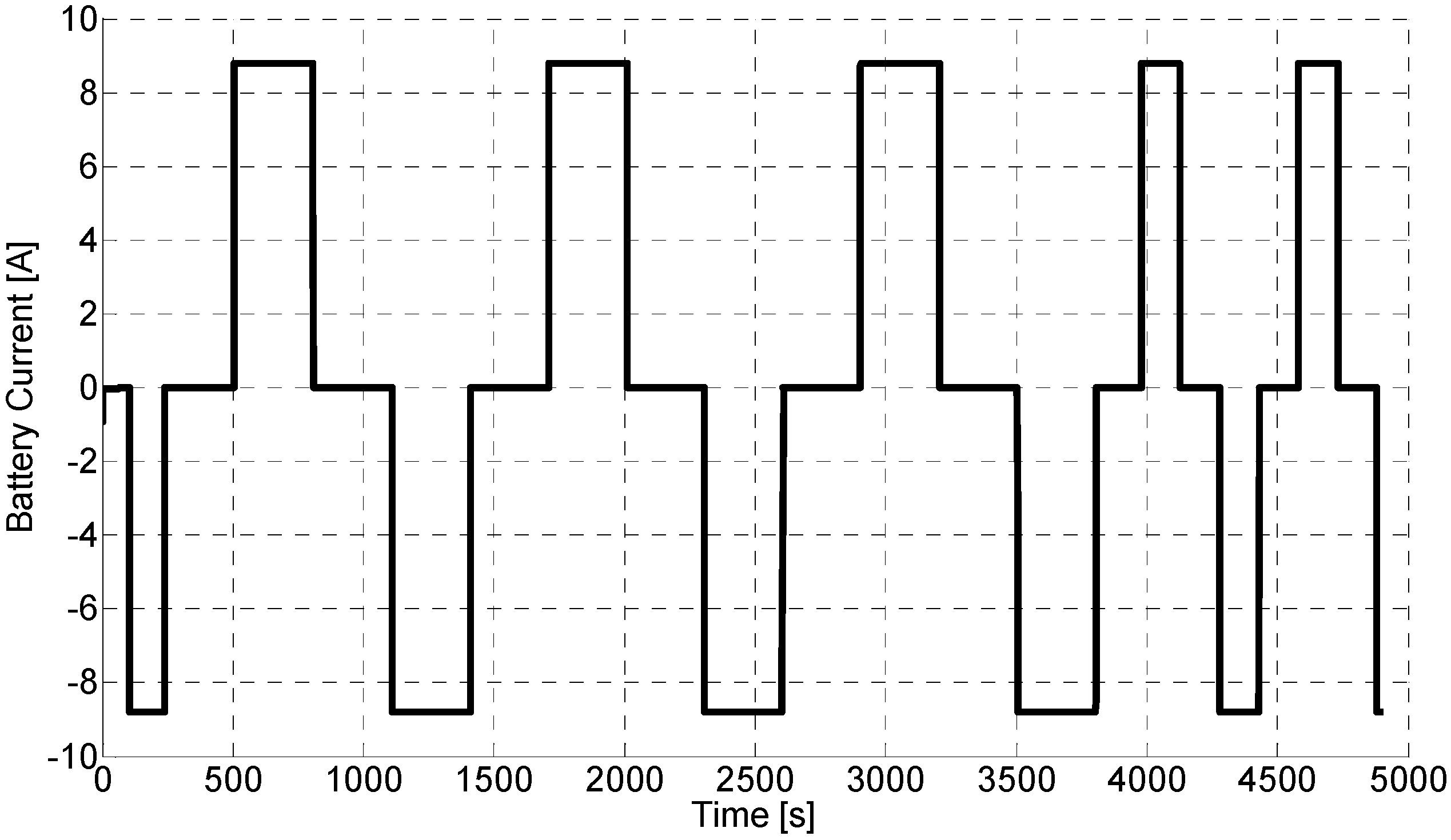
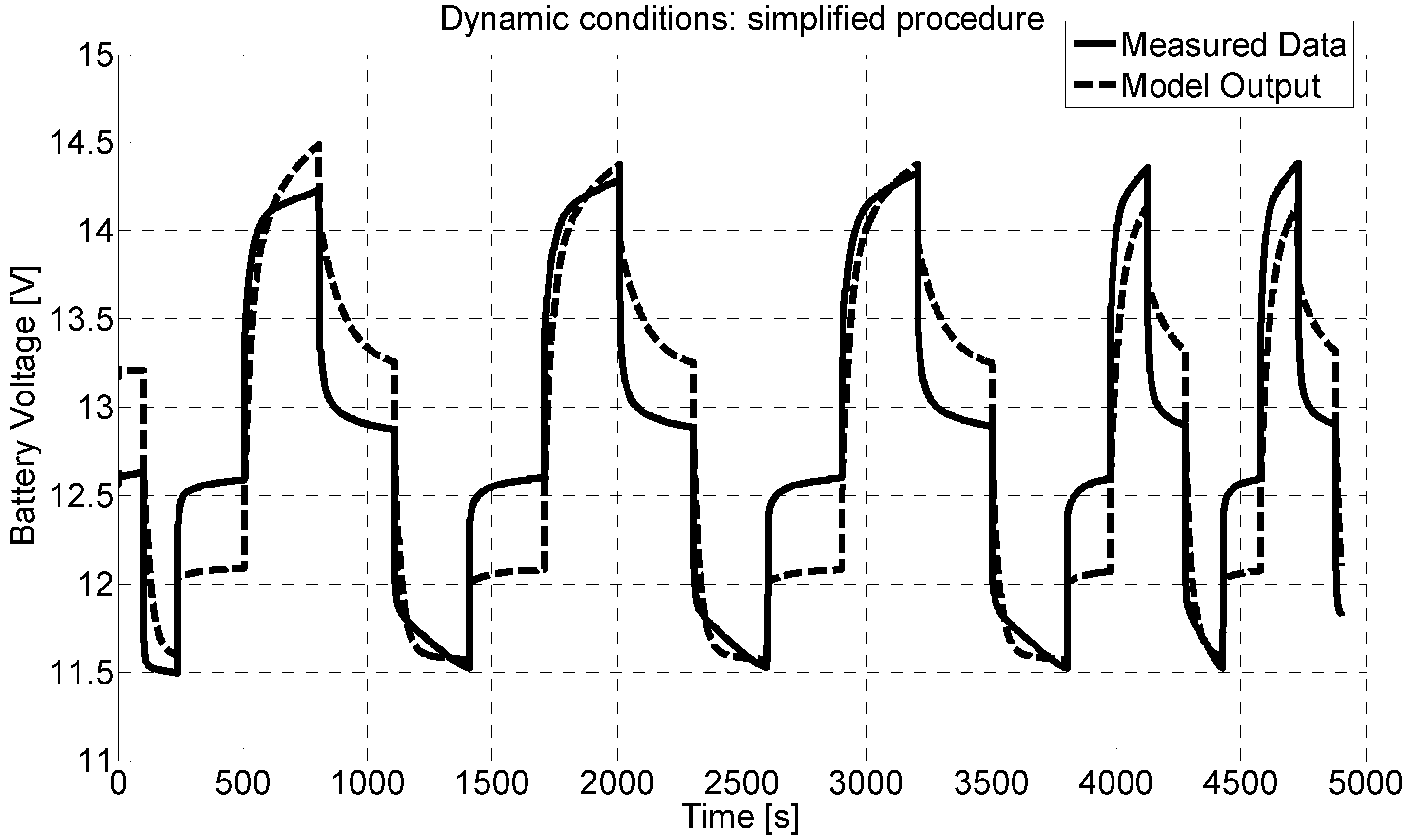
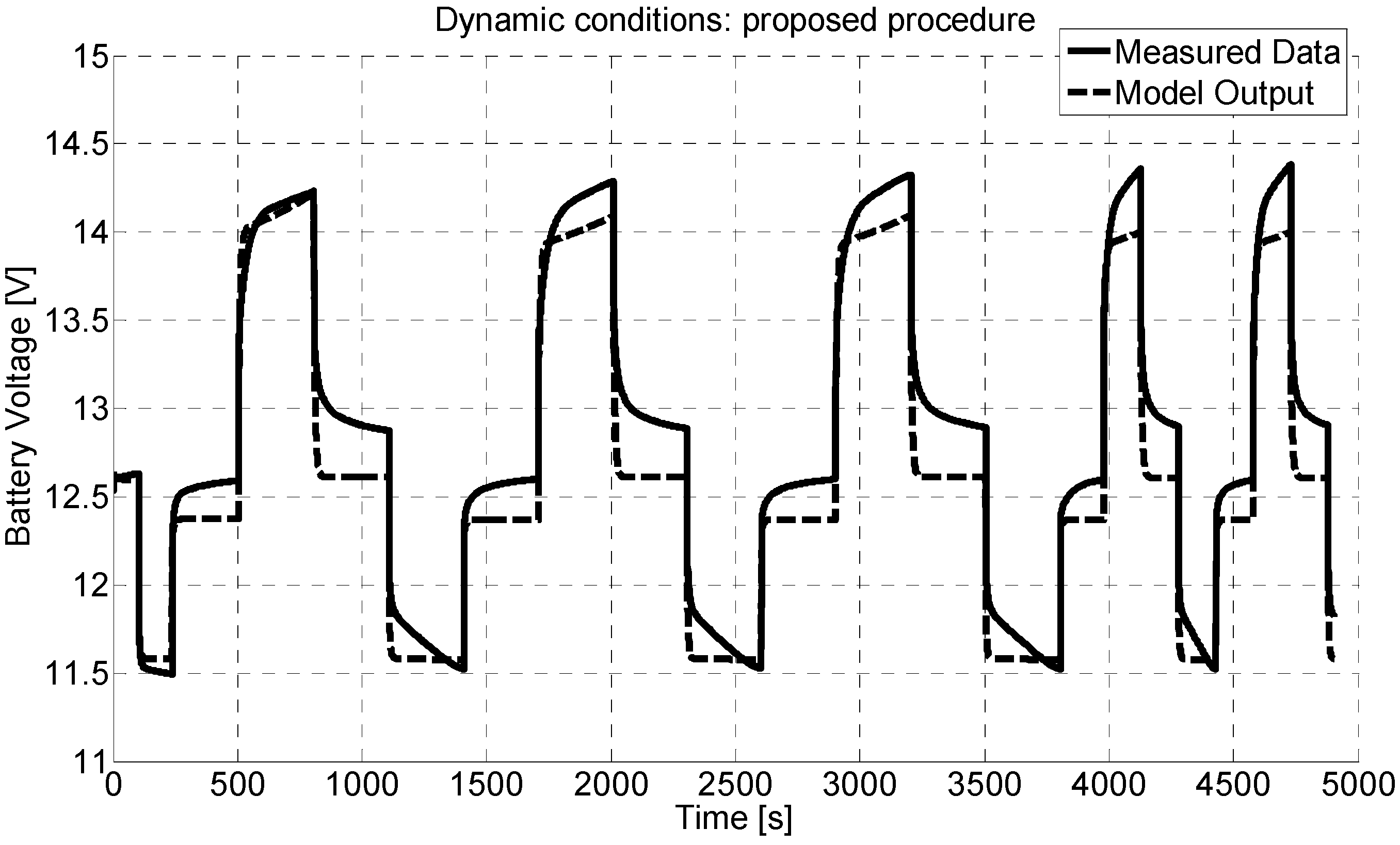
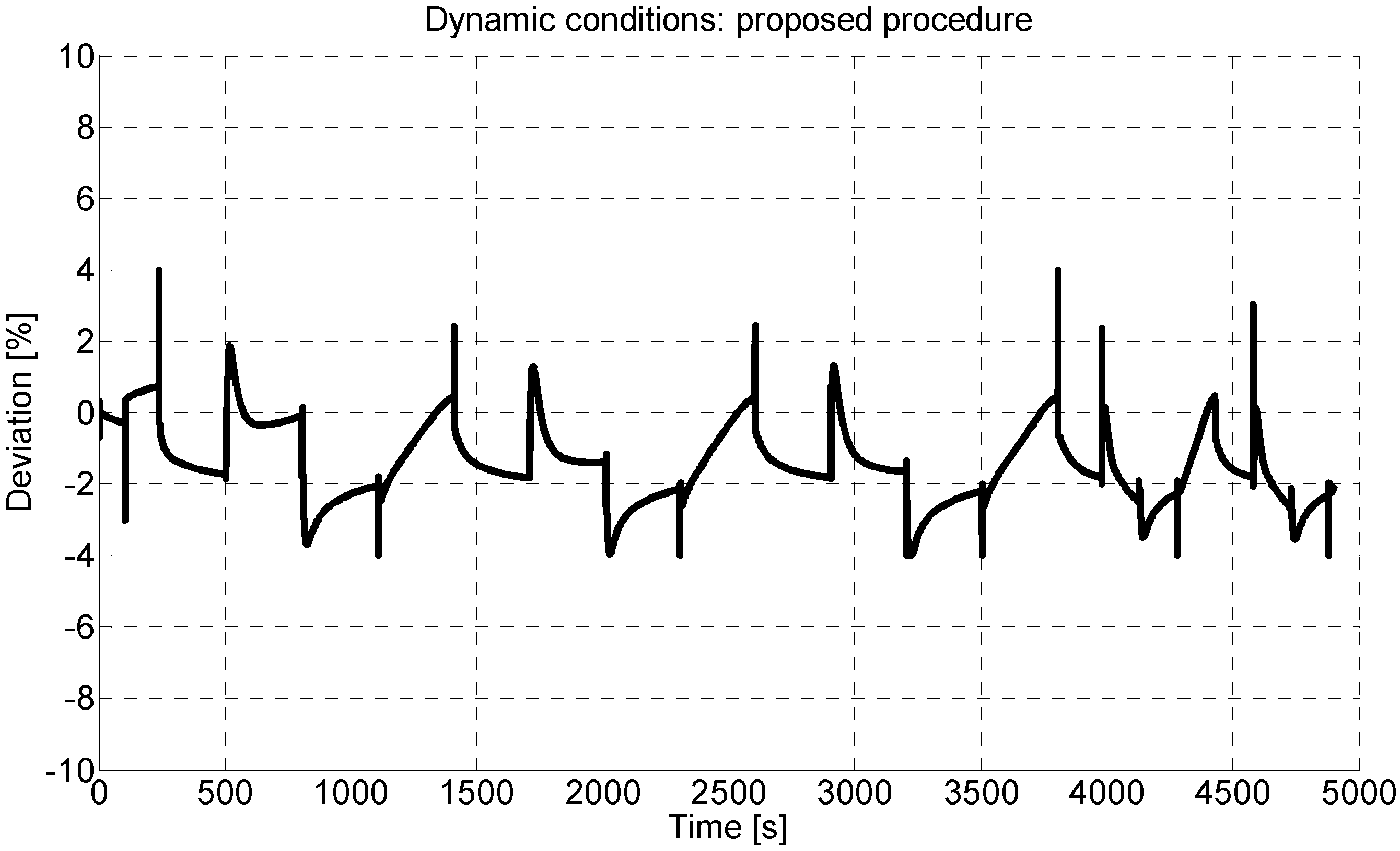
4.2. Experimental Validation in Dynamic Conditions

5. Conclusions
Conflicts of Interest
References
- Ipakchi, A.; Albuyeh, F. Grid of the future. IEEE Power Energy Mag. 2009, 7, 52–62. [Google Scholar]
- Moslehi, K.; Kumar, R. A reliability perspective of the smart grid. IEEE Trans. Smart Grid 2010, 1, 57–64. [Google Scholar] [CrossRef]
- Baker, J.N.; Collinson, A. Electrical energy storage at the turn of the Millennium. Power Eng. J. 1999, 13, 107–112. [Google Scholar] [CrossRef]
- Divya, K.C.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Barton, J.P.; Infield, D.G. Energy storage and its use with intermittent renewable energy. IEEE Trans. Energy Convers. 2004, 19, 441–448. [Google Scholar] [CrossRef]
- Dell, R.M.; Rand, D.A.J. Energy storage—A key technology for global energy sustainability. J. Power Sources 2001, 100, 2–17. [Google Scholar] [CrossRef]
- Sparacino, A.R.; Reed, G.F.; Kerestes, R.J.; Grainger, B.M.; Smith, Z.T. Survey of Battery Energy Storage Systems and Modeling Techniques. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8.
- Dell, R.; Rand, D.A.J. Understanding Batteries; Royal Society of Chemistry: Cambridge, UK, 2001. [Google Scholar]
- Linden, D.; Reddy, T.B. Handbook of Batteries, 3rd ed.; McGraw-Hill: Whitby, ON, Canada, 2001. [Google Scholar]
- Gallo, D.; Landi, C.; Luiso, M. Real time digital compensation of current transformers over a wide frequency range. IEEE Trans. Instrum. Meas. 2010, 59, 1119–1126. [Google Scholar] [CrossRef]
- Landi, C.; Luiso, M.; Pasquino, N. A remotely controlled on-board measurement system for optimization of energy consumption of electrical trains. IEEE Trans. Instrum. Meas. 2008, 57, 2250–2256. [Google Scholar] [CrossRef]
- Acampora, G.; Landi, C.; Luiso, M.; Pasquino, N. Optimization of Energy Consumption in a Railway Traction System. In Proceedings of the IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM 2006, Taormina, Italy, 23–26 May 2006; pp. 5–16.
- Gallo, D.; Landi, C.; Luiso, M. Compensation of current transformers by means of field programmable gate array. Metrol. Meas. Syst. 2009, 2, 279–288. [Google Scholar]
- Gallo, D.; Landi, C.; Luiso, M. Power quality monitoring instrument with fpga transducer compensation. IEEE Trans. Instrum. Meas. 2009, 58, 3149–3158. [Google Scholar] [CrossRef]
- Delle-Femine, A.; Gallo, D.; Landi, C.; Luiso, M.A. Technique for Real-Time Correction of Measurement Instrument Transducers Frequency Responses. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (IMTC), Victoria, BC, Canada, 12–15 May 2008.
- Landi, C.; Noviello, E.I. Architecture of a Microprogrammed Measurement System to Test Batteries for Vehicular Applications. In Proceedings of the Drive Electric’85, Sorrento, Italy, 1–3 October 1985.
- Yuan, S.; Wu, H.; Yin, C. State of charge estimation using the extended kalman filter for battery management systems based on the arx battery model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Nguyen, M.Y.; Nguyen, D.H.; Yoon, Y.T. A new battery energy storage charging/discharging scheme for wind power producers in real-time markets. Energies 2012, 5, 5439–5452. [Google Scholar] [CrossRef]
- Omar, N.; Daowd, M.; Bossche, P.; Hegazy, O.; Smekens, J.; Coosemans, T.; Mierlo, J. Rechargeable energy storage systems for plug-in hybrid electric vehicles—Assessment of electrical characteristics. Energies 2012, 5, 2952–2988. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of lithium-ion battery equivalent circuit models for state of charge estimation by an experimental approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Ardito, L.; Procaccianti, G.; Menga, G.; Morisio, M. Smart grid technologies in Europe: An overview. Energies 2013, 6, 251–281. [Google Scholar] [CrossRef]
- Yoo, J.; Park, B.; An, K.; Al-Ammar, E.A.; Khan, Y.; Hur, K.; Kim, J.H. Look-Ahead energy management of a grid-connected residential pv system with energy storage under time-based rate programs. Energies 2012, 5, 1116–1134. [Google Scholar] [CrossRef]
- Li, S.H.; Ke, B. Study of Battery Modeling Using Mathematical and Circuit Oriented Approaches. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011.
- Dessaint, L.A.; Tremblay, O. Experimental validation of a battery dynamic model for EV applications. World Electr. Veh. J. 2009, 3, 1–10. [Google Scholar]
- Gomadam, P.M.; Weidner, J.W.; Dougal, R.A.; White, R.E. Mathematical modeling of lithium-ion and nickel battery systems. J. Power Sources 2002, 110, 267–284. [Google Scholar] [CrossRef]
- Shepherd, C.M. Design of primary and secondary cells. J. Electrochem. Soc. 1965, 112, 657–664. [Google Scholar] [CrossRef]
- Cherif, A.; Jraidi, M.; Dhouib, A. A battery aging model used in standalone PV system. J. Power Sources 2002, 112, 49–53. [Google Scholar] [CrossRef]
- Ross, M.M.D. A Simple but Comprehensive Lead-Acid Battery Model for Hybrid System Simulation. In Proceedings of the PV Horizon: Workshop on Photovoltaic Hybrid Systems, Montreal, QC, Canada, 10 September 2001.
- Chen, M.; Rincon-Mora, G.A. Accurate electrical battery model capable of predicting runtime and I–V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Salameh, Z.M.; Casacca, M.A.; Lynch, W.A. A mathematical model for lead-acid batteries. IEEE Trans. Energy Convers. 1992, 7, 93–98. [Google Scholar] [CrossRef]
- Valvo, M.; Wicks, F.E.; Robertson, D.; Rudin, S. Development and Application of an Improved Equivalent Circuit Model of a Lead Acid Battery. In Proceedings of the 31st Intersociety Energy Conversion Engineering Conference, Washington, DC, USA, 11–16 August 1996; pp. 1159–1163.
- Ceraolo, M. New dynamical models of lead-acid batteries. IEEE Trans. Power Syst. 2000, 15, 1184–1190. [Google Scholar] [CrossRef]
- Barsali, S.; Ceraolo, M. Dynamical models of lead-acid batteries: Implementation issues. IEEE Trans. Energy Convers. 2002, 17, 16–23. [Google Scholar] [CrossRef]
- Benini, L.; Castelli, G.; Macci, A.; Macci, E.; Poncino, M.; Scarsi, R. Discrete-time battery models for system-level low-power design. IEEE Trans. VLSI Syst. 2001, 9, 630–640. [Google Scholar] [CrossRef]
- Schweighofer, B.; Raab, K.M.; Brasseur, G. Modeling of high power automotive batteries by the use of an automated test system. IEEE Trans. Instrum. Meas. 2003, 52, 1087–1091. [Google Scholar] [CrossRef]
- Gao, L.; Liu, S.; Dougal, R.A. Dynamic lithium-ion battery model for system simulation. IEEE Trans. Compon. Packag. Technol. 2002, 25, 495–505. [Google Scholar] [CrossRef]
- Buller, S.; Thele, M.; Doncker, R.W.D.; Karden, E. Impedance based simulation models of supercapacitors and Li-ion batteries for power electronic applications. IEEE Trans. Ind. Appl. 2005, 41, 742–747. [Google Scholar] [CrossRef]
- Baudry, P.; Neri, M.; Gueguen, M.; Lonchampt, G. Electro-thermal modeling of polymer lithium batteries for starting period and pulse power. J. Power Sources 1995, 54, 393–396. [Google Scholar] [CrossRef]
- Zhang, H.; Chow, M.Y. Comprehensive Dynamic Battery Modeling for PHEV Applications. In Proceedings of the 2010 IEEE PES General Meeting, Minneapolis, MN, USA, 26–29 July 2010.
- Bindner, H.; Cronin, T.; Lundsager, P.; Manwell, J.F.; Abdulwahid, U.; Baring-Gould, I. Lifetime Modelling of Lead Acid Batteries; Risø National Laboratory: Roskilde, Denmark, 2005. [Google Scholar]
- Feng, X.; Sun, Z. A Battery Model Including Hysteresis for State-of-Charge estimation in Ni-MH Battery. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008.
- Langella, R.; Testa, A. Analysis of the Cost of Electric Energy Discharged to the Grid by Some Energy Storage Systems. In Proceedings of the 2012 IEEE International Energy Conference and Exhibition, Florence, Italy, 9–12 September 2012.
- Carpentiero, V.; Langella, R.; Testa, A. Hybrid wind-diesel stand-alone system sizing accounting for component expected life and fuel price uncertainty. Electr. Power Syst. Res. 2012, 88, 69–77. [Google Scholar] [CrossRef]
- Zenati, A.; Desprez, P.; Razik, H. Estimation of the SOC and the SOH of Li-Ion Batteries, by Combining Impedance Measurements with the Fuzzy Logic Inference. In Proceedings of the 36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 1773–1778.
- Kaipio, J.; Somersalo, E. Statistical and Computational Inverse Problems; Springer Science + Business Media Inc.: New York, NY, USA, 2005. [Google Scholar]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithm; Wiley: Chichester, West Sussex, UK, 2001. [Google Scholar]
- Coleman, T.F.; Li, Y. An interior, trust region approach for nonlinear minimization subject to bounds. SIAM J. Optim. 1996, 6, 418–445. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1989. [Google Scholar]
- Kumar, P.; Bauer, P. Parameter Extraction of Battery Models Using Multiobjective Optimization Genetic Algorithms. In Proceedings of the 14th International Power Electronics and Motion Control Conference (EPE/PEMC), Ohrid, Macedonia, 6–8 September 2010; pp. T9:106–T9:110.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gallo, D.; Landi, C.; Luiso, M.; Morello, R. Optimization of Experimental Model Parameter Identification for Energy Storage Systems. Energies 2013, 6, 4572-4590. https://doi.org/10.3390/en6094572
Gallo D, Landi C, Luiso M, Morello R. Optimization of Experimental Model Parameter Identification for Energy Storage Systems. Energies. 2013; 6(9):4572-4590. https://doi.org/10.3390/en6094572
Chicago/Turabian StyleGallo, Daniele, Carmine Landi, Mario Luiso, and Rosario Morello. 2013. "Optimization of Experimental Model Parameter Identification for Energy Storage Systems" Energies 6, no. 9: 4572-4590. https://doi.org/10.3390/en6094572