Interest and Applicability of Meta-Heuristic Algorithms in the Electrical Parameter Identification of Multiphase Machines †

 ,
,  , , and
, , and 
Abstract
:1. Introduction
- The analysis of the utility of PSO algorithms in an application-oriented case like the estimation of the electrical parameters of a five-phase induction machine.
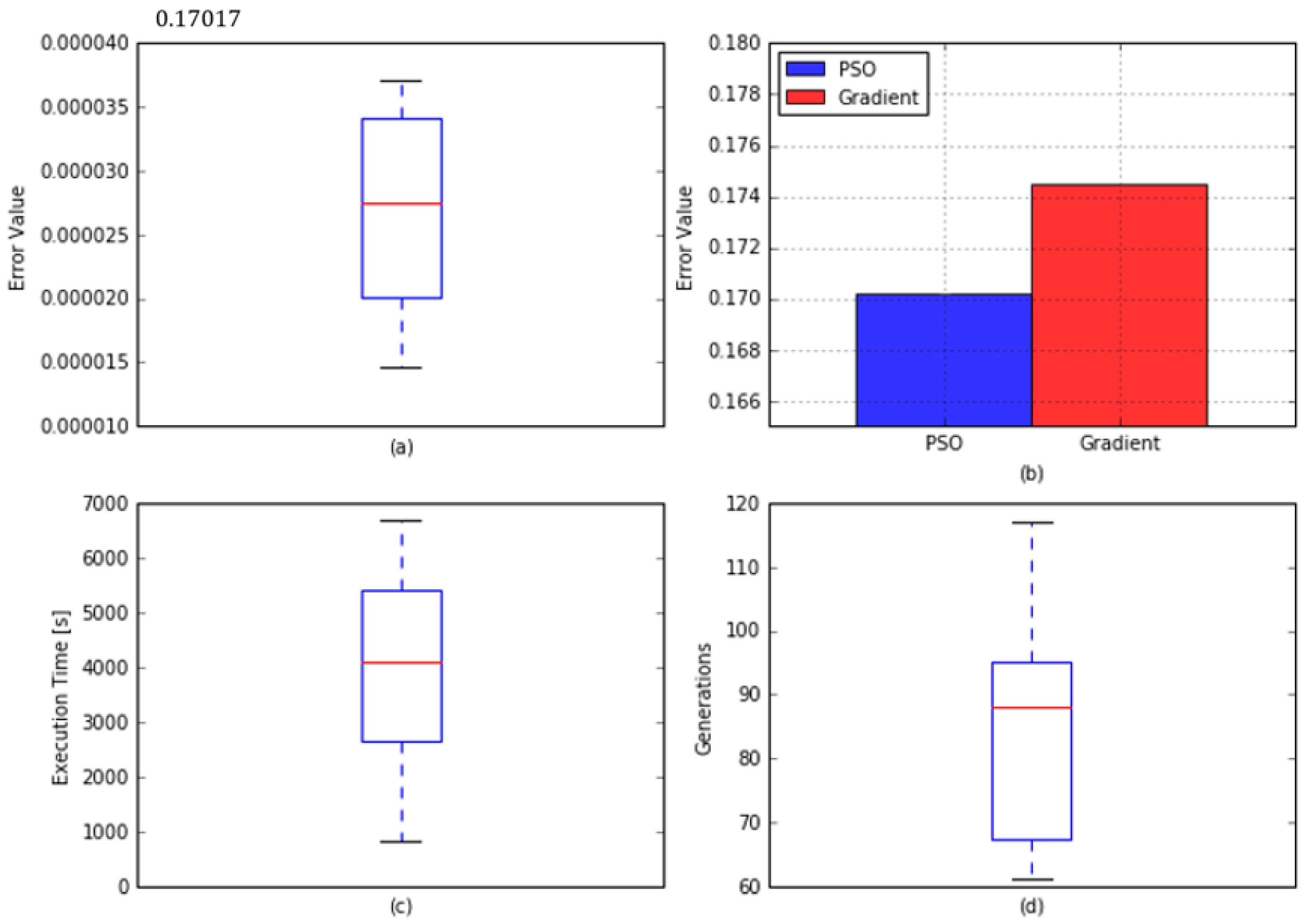
- The comparison of the proposed PSO estimation technique with gradient-following-based algorithms [16]. The proposed technique clearly outperforms the gradient-based technique.
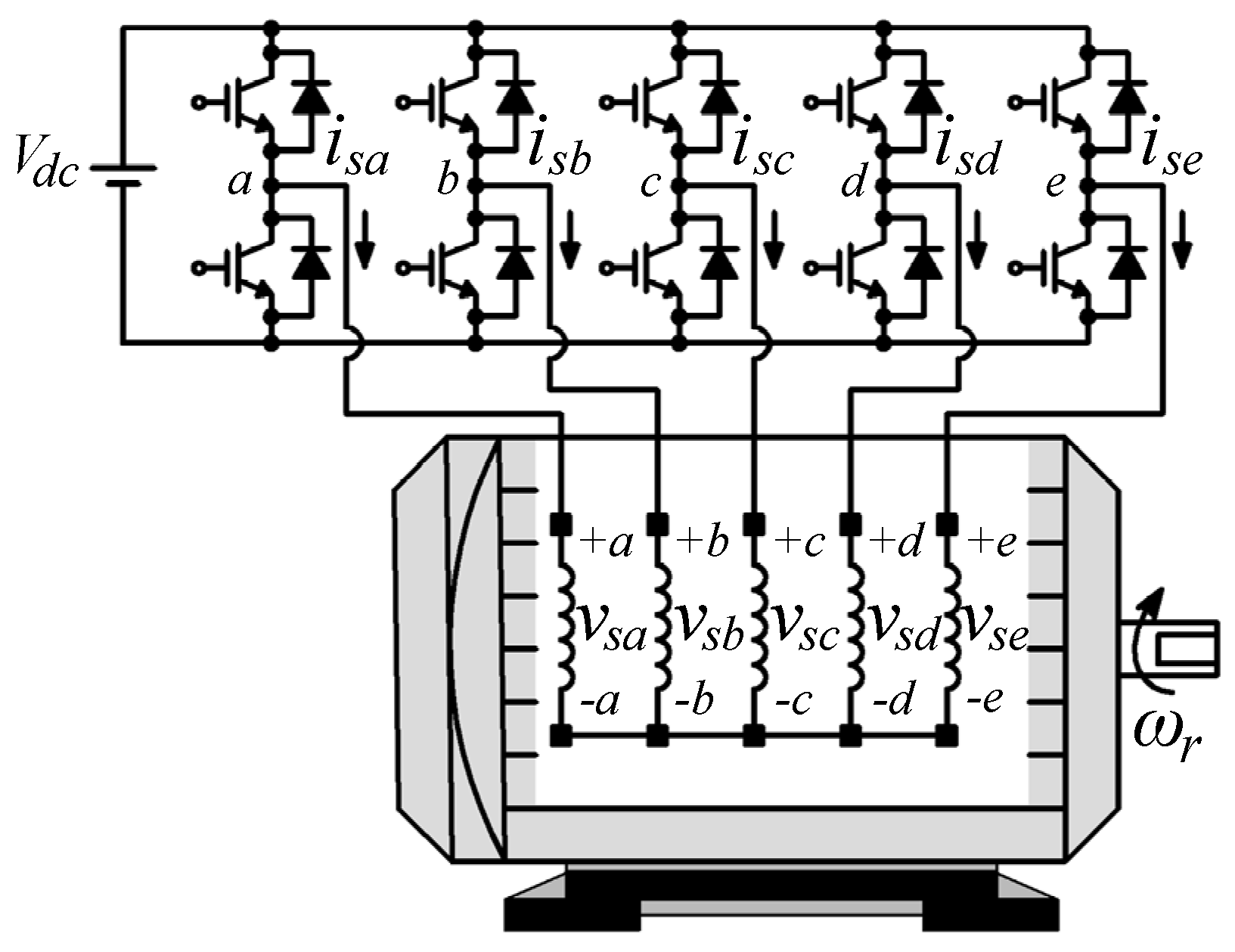
2. Background: Five-Phase Induction Machines and PSO Algorithm
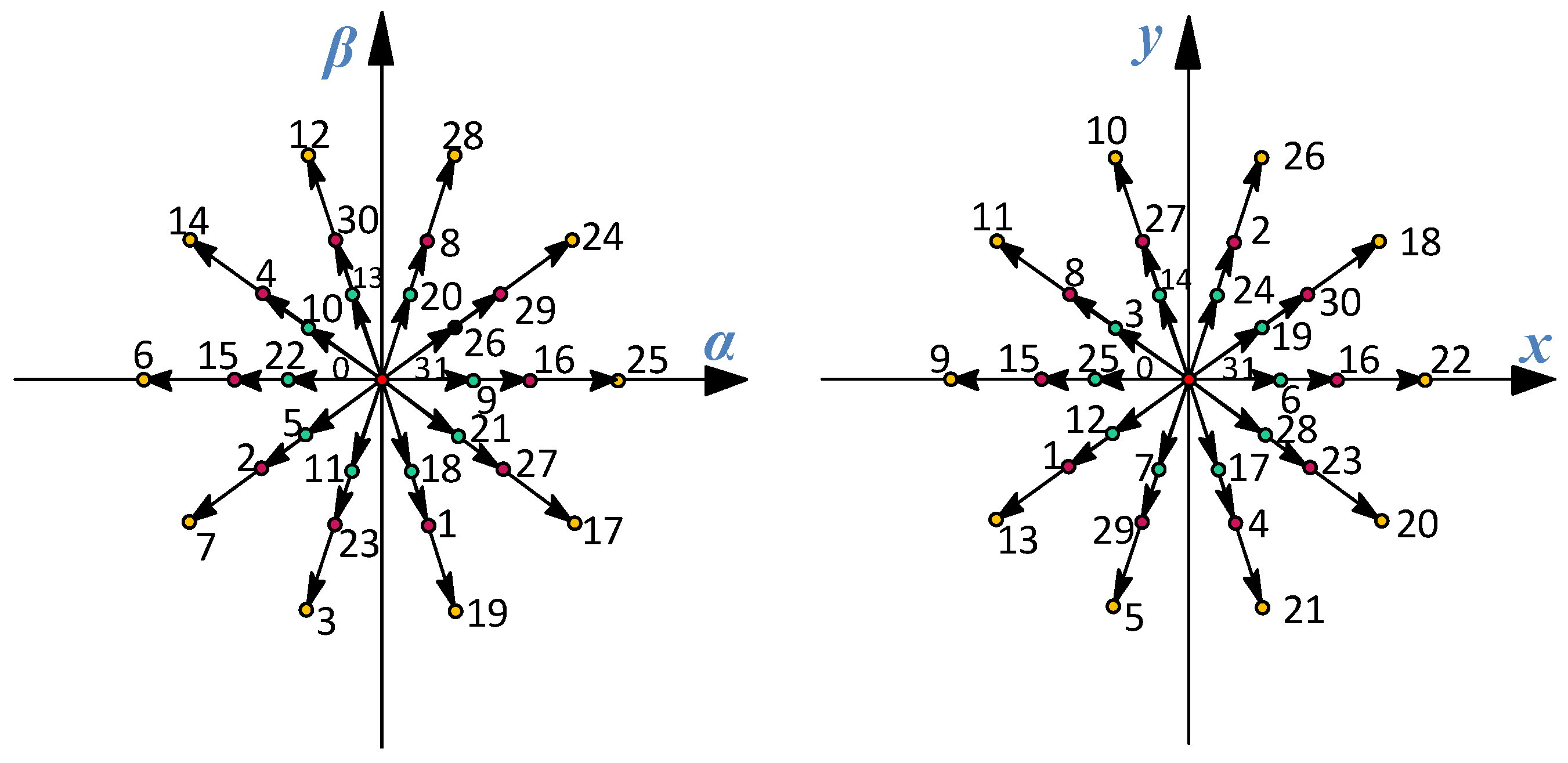
2.1. Five-Phase Induction Machines
2.2. PSO Algorithm
| Algorithm 1 |
| Objective function |
| Initialize locations and velocity , |
| Find from at (t = 0) |
| While (criterion) |
| For loop over all P particles and all d dimensions |
| Generate new velocity using (8) |
| Calculate new locations using (9) |
| Evaluate objective function at new locations |
| Find for each particle |
| End for |
| Find the current |
| Update t = t + 1 |
| End while |
| Output the final results and |
3. Suggested Estimation Procedure
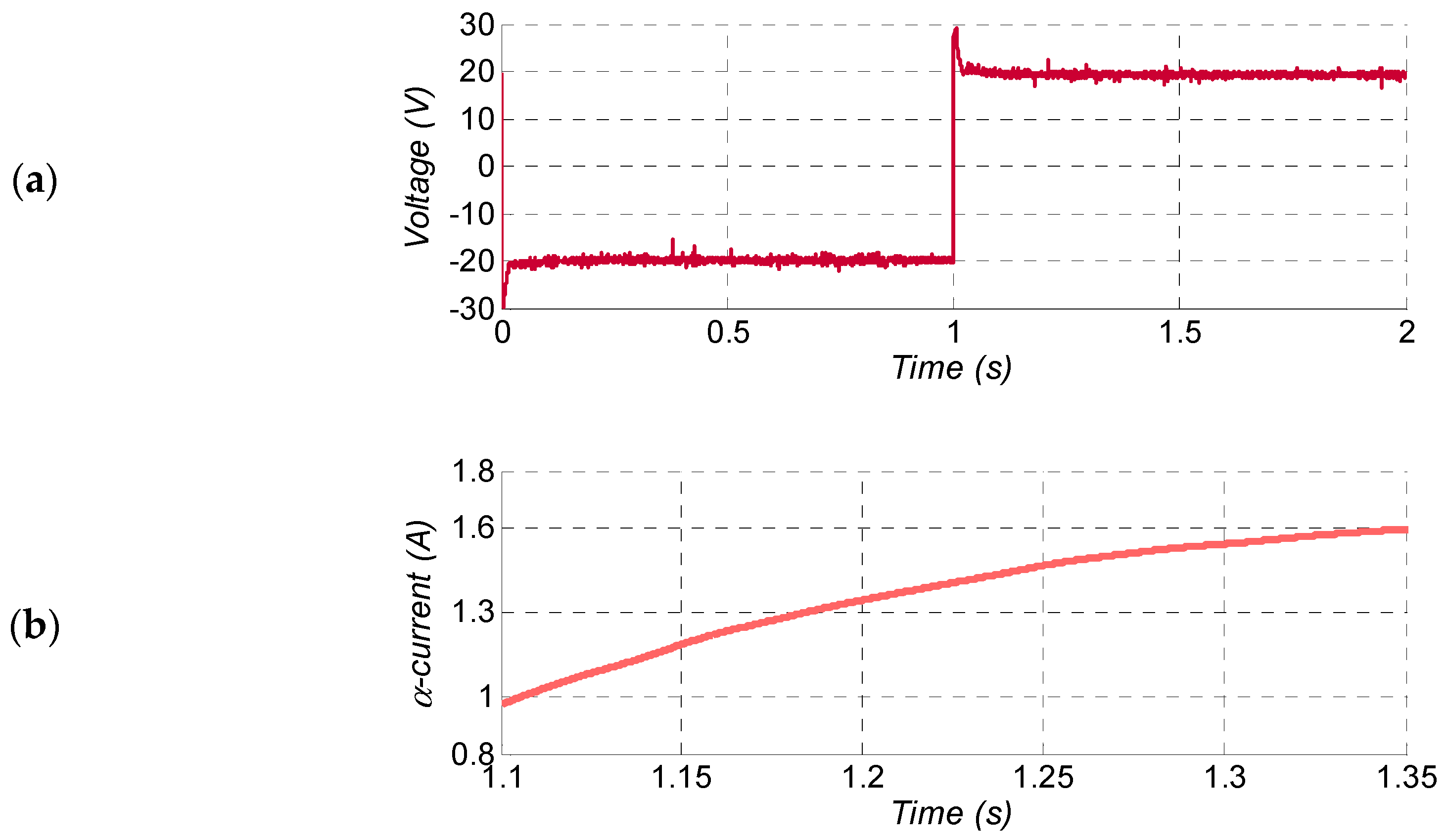
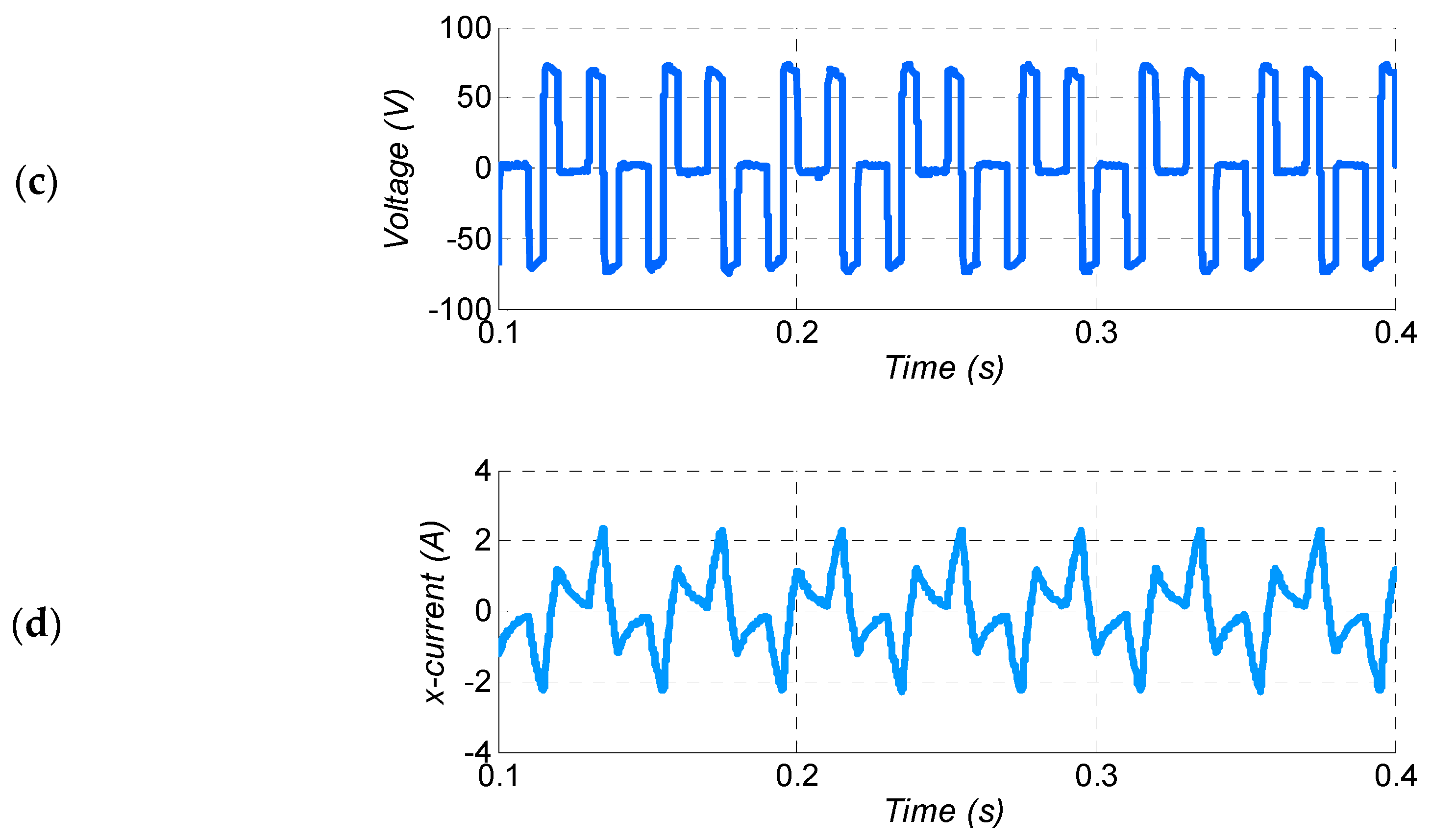
3.1. Standstill Procedure in Five-Phase Induction Drives
3.2. Search Engine for the Estimation Process Using PSO
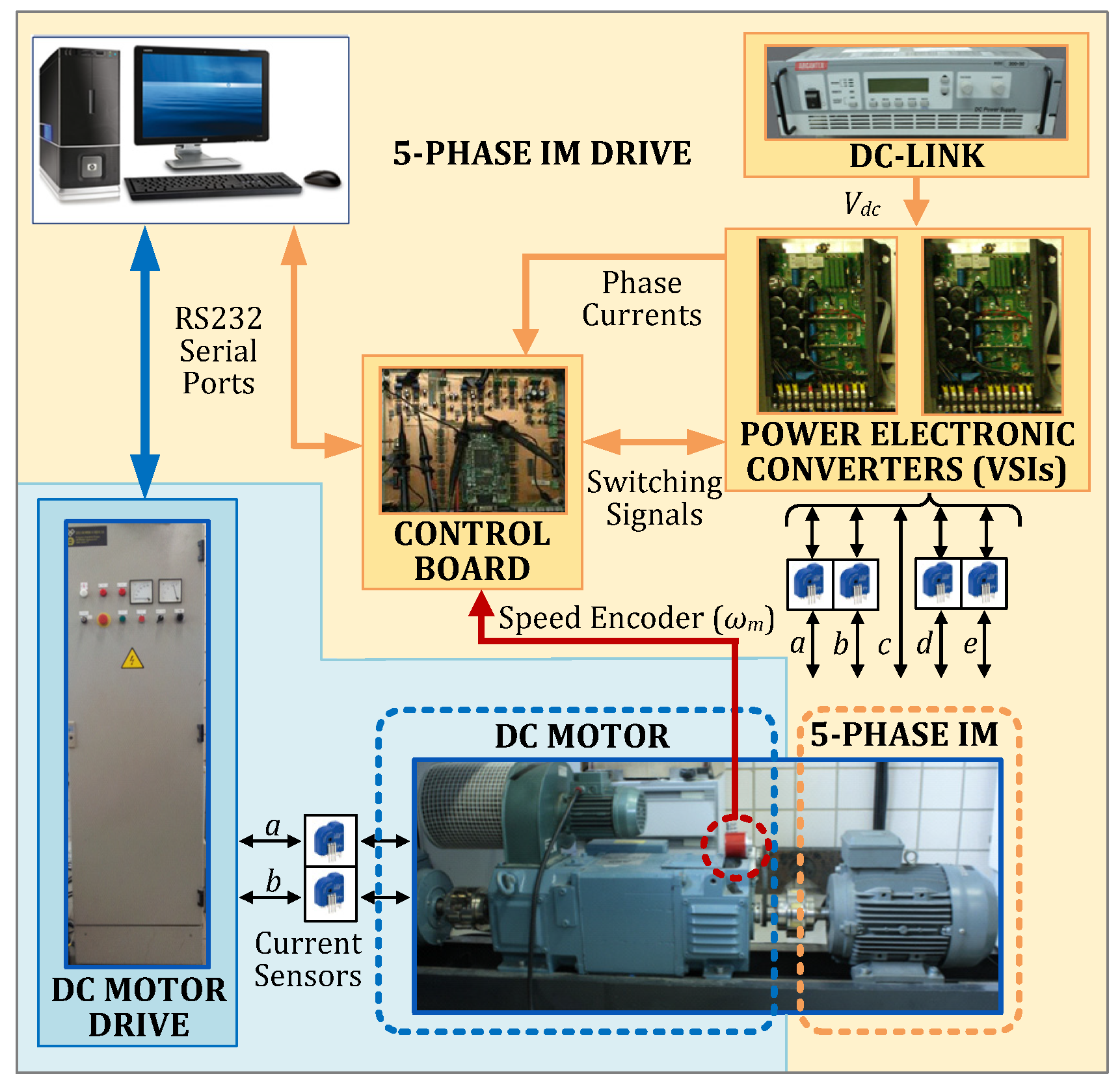
4. Experimental Assessment
4.1. Identification of the Electrical Parameters of the System
4.2. Stadistical Analysis and Comparison with a Grandient-Based Approach
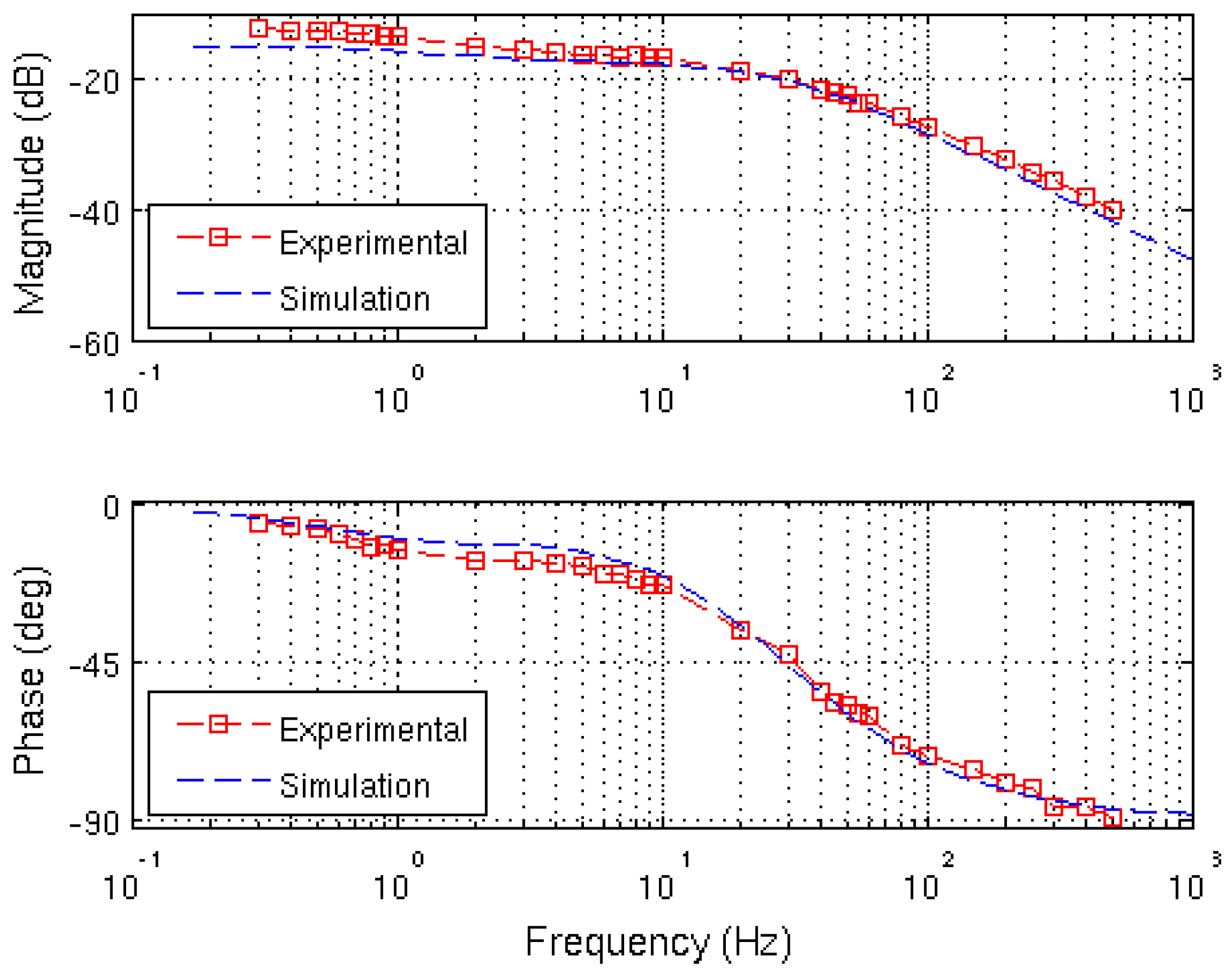
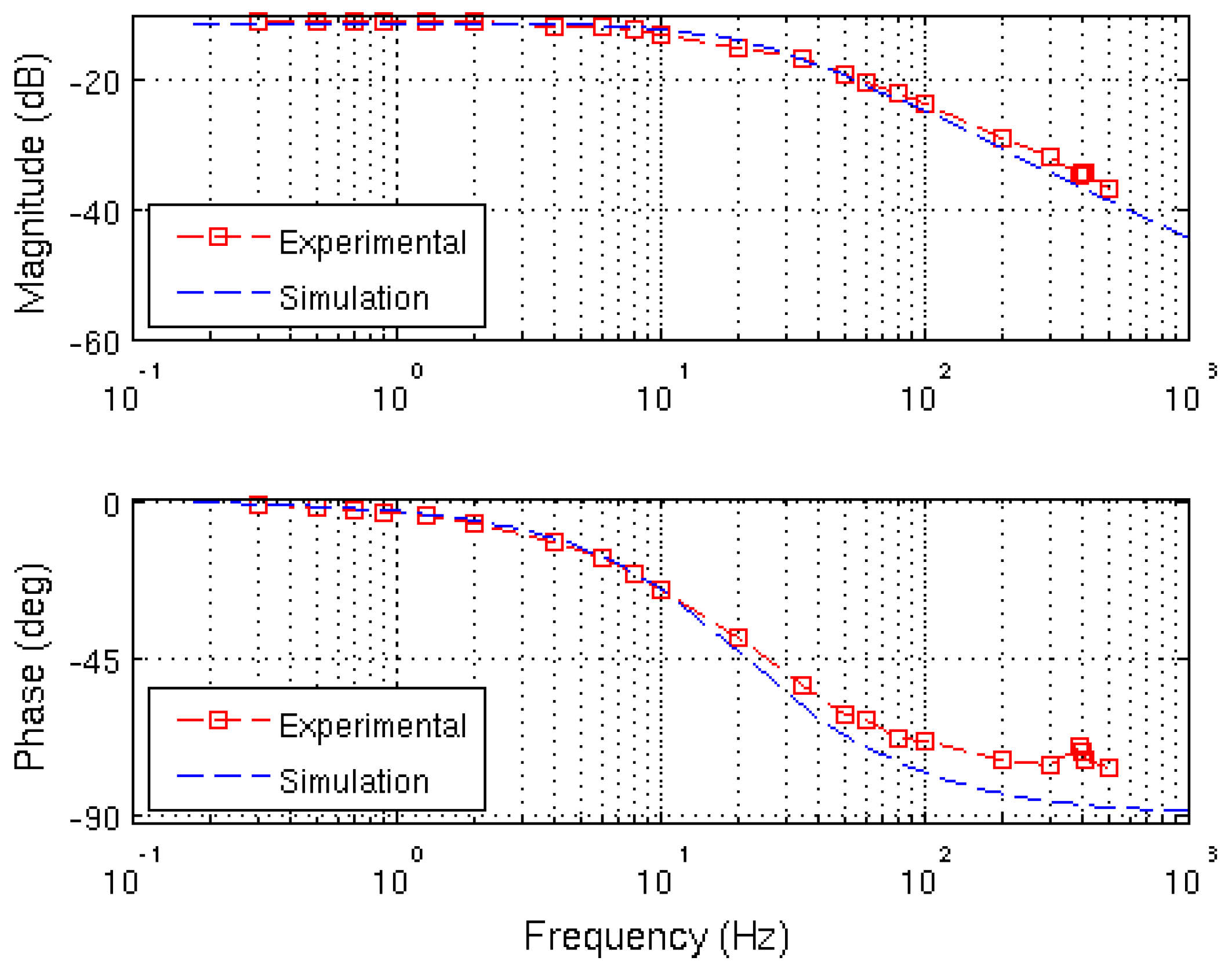
4.3. Experimental Validation of the Estimated Parameters
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Barrero, F.; Duran, M.J. Recent Advances in the Design, Modeling and Control of Multiphase Machines—Part 1. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent Advances in the Design, Modeling and Control of Multiphase Machines—Part 2. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Duran, M.J.; Riveros, J.; Barrero, F.; Guzmán, H.; Prieto, J. Reduction of common-mode voltage in five-phase induction motor drives using predictive control techniques. IEEE Trans. Ind. Appl. 2012, 48, 2059–2067. [Google Scholar] [CrossRef]
- Riveros, J.A.; Barrero, F.; Levi, E.; Durán, M.J.; Toral, S.; Jones, M. Variable-speed five-phase induction motor drive based on predictive torque control. IEEE Trans. Ind. Electron. 2013, 60, 2957–2968. [Google Scholar] [CrossRef]
- Carraro, M.; Zigliotto, M. Automatic Parameter Identification of Inverter-Fed Induction Motors at Standstill. IEEE Trans. Ind. Electron. 2014, 61, 4605–4613. [Google Scholar] [CrossRef]
- Lee, S.H.; Yoo, A.; Lee, H.-J.; Yoon, Y.-D.; Han, B.-M. Identification of Induction Motor Parameters at Standstill Based on Integral Calculation. IEEE Trans. Ind. Appl. 2017, 53, 2130–2139. [Google Scholar] [CrossRef]
- He, Y.; Wang, Y.; Feng, Y.; Wang, Z. Parameter Identification of an Induction Machine at Standstill Using the Vector Constructing Method. IEEE Trans. Power Electron. 2012, 27, 905–915. [Google Scholar] [CrossRef]
- Yepes, A.G.; Riveros, J.A.; Doval-Gandoy, J.; Barrero, F.; López, O.; Bogado, B.; Jones, M.; Levi, E. Parameter identification of multiphase induction machine with distributed windings—Part 1: Sinusoidal excitation methods. IEEE Trans. Energy Convers. 2012, 27, 1056–1066. [Google Scholar] [CrossRef]
- Riveros, J.A.; Yepes, A.G.; Barrero, F.; Doval-Gandoy, J.; Bogado, B.; Lopez, O.; Jones, M.; Levi, E. Parameter identification of multiphase induction machine with distributed windings—Part 2: Time domain techniques. IEEE Trans. Energy Convers. 2012, 27, 1067–1077. [Google Scholar] [CrossRef]
- Sakthivel, V.P.; Bhuvaneswari, R.; Subramanian, S. Artificial immune system for parameter estimation of induction motor. Expert Syst. Appl. 2010, 37, 6109–6115. [Google Scholar] [CrossRef]
- Bettayeb, M.; Qidwai, U. A hybrid least squares-GA-based algorithm for harmonic estimation. IEEE Trans. Power Deliv. 2003, 12, 377–382. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Fernandez-Martinez, J.L.; Garcia-Gonzalo, E. Stochastic Stability Analysis of the Linear Continuous and Discrete PSO Models. IEEE Trans. Evol. Comput. 2011, 15, 405–423. [Google Scholar] [CrossRef]
- Del Valle, Y.; Venayagamoorthy, G.K.; Mohagheghi, S.; Harley, R.G.; Hernandez, J.C. Particle swarm optimization: Basic concepts, variants and applications in power systems. IEEE Trans. Evol. Comput. 2008, 12, 171–195. [Google Scholar] [CrossRef]
- Eslami, M.; Shareef, H.; Mohamed, A.; Khajehzadeh, M. An efficient particle swarm optimization technique with chaotic sequence for optimal tuning and placement of PSS in power systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1467–1478. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Zarri, L.; Bogado, B.; Prieto, I.G.; Arahal, M.R. Comparative Study of Predictive and Resonant Controllers in Fault-Tolerant Five-phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 606–617. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, S. A novel PSO algorithm based on an incremental-PID-controlled search strategy. Soft Comput. 2016, 20, 991–1005. [Google Scholar] [CrossRef]
- Rada-Vilela, J.; Johnston, M.; Zhang, M. Population statistics for particle swarm optimization: Single-evaluation methods in noisy optimization problems. Soft Comput. 2015, 19, 2691–2716. [Google Scholar] [CrossRef]
- Yıldız, A.R. A novel particle swarm optimization approach for product design and manufacturing. Int. J. Adv. Manuf. Technol. 2009, 40, 617–628. [Google Scholar] [CrossRef]
- Yıldız, A.R. A new hybrid particle swarm optimization approach for structural design optimization in automotive industry. J. Automob. Eng. 2012, 226, 1340–1351. [Google Scholar] [CrossRef]
- Yıldız, A.R. Comparison of evolutionary based optimization algorithms for structural design optimization. Eng. Appl. Artif. Intell. 2013, 26, 327–333. [Google Scholar] [CrossRef]
- Sheikhan, M.; Mohammadi, N. Time series prediction using PSO-optimized neural network and hybrid feature selection algorithm for IEEE load data. Neural Comput. Appl. 2013, 23, 1195. [Google Scholar] [CrossRef]
- Krama, A.; Zellouma, L.; Rabhi, B.; Refaat, S.; Bouzidi, M. Real-Time Implementation of High Performance Control Scheme for Grid-Tied PV System for Power Quality Enhancement Based on MPPC-SVM Optimized by PSO Algorithm. Energies 2018, 11, 3516. [Google Scholar] [CrossRef]
- Yun, P.; Ren, Y.; Xue, Y. Energy-Storage Optimization Strategy for Reducing Wind Power Fluctuation via Markov Prediction and PSO Method. Energies 2018, 11, 3393. [Google Scholar] [CrossRef]
- Yildiz, A.R.; Solanki, K.N. Multi-objective optimization of vehicle crashworthiness using a new particle swarm based approach. Int. J. Adv. Manuf. Technol. 2012, 59, 367–376. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Winding Connections | Voltage Vectors | Decoupled Voltage Components |
|---|---|---|
 |  | |
 |  |
| PSO Parameter | Value |
|---|---|
| Number of trials | 30 |
| Number of particles (ps) | [25, 125] |
| Acceleration coefficients (c1 and c2) | c1= c2 = [0.1, 2] |
| Inertia weights (wmax and wmin) | wmax = [0.5, 1.4] and wmin = 0.3 |
| Maximum particle velocity (vmax) | vmax = [1, 3] |
| Lowest error gradient tolerance (errgrad) | errgrad = 1·× 10-6 |
| Maximum number of generation without error change (errgraditer) | errgraditer = 40 |
| Maximum number of iterations (itermax) | itermax = 400 |
| Machine Parameter | Interval |
|---|---|
| Rs (Ω) | [10, 25] |
| Rr (Ω) | [1, 10] |
| Lm (H) | [0.5, 0.7] |
| Lls (H) | [0.010, 0.160] |
| Llr (H) | [0.010, 0.060] |
| Machine Parameter | Value |
|---|---|
| Rs (Ω) | 19.4462 |
| Rr (Ω) | 6.7659 |
| Lm (H) | 0.6565 |
| Lls (H) | 0.1007 |
| Llr (H) | 0.0386 |
| Ps | Max. | Mean | Std. |
|---|---|---|---|
| 25 | 0.3340 | 0.3450 | 8.4569 × 10−6 |
| 50 | 0.1879 | 0.1928 | 3.4569 × 10−6 |
| 75 | 0.1701 | 0.1745 | 2.4569 × 10−6 |
| 100 | 0.1722 | 0.2038 | 2.2269 × 10−6 |
| 125 | 0.1725 | 0.1755 | 2.1100 × 10−6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutierrez-Reina, D.; Barrero, F.; Riveros, J.; Gonzalez-Prieto, I.; Toral, S.L.; Duran, M.J. Interest and Applicability of Meta-Heuristic Algorithms in the Electrical Parameter Identification of Multiphase Machines. Energies 2019, 12, 314. https://doi.org/10.3390/en12020314
Gutierrez-Reina D, Barrero F, Riveros J, Gonzalez-Prieto I, Toral SL, Duran MJ. Interest and Applicability of Meta-Heuristic Algorithms in the Electrical Parameter Identification of Multiphase Machines. Energies. 2019; 12(2):314. https://doi.org/10.3390/en12020314
Chicago/Turabian StyleGutierrez-Reina, Daniel, Federico Barrero, Jose Riveros, Ignacio Gonzalez-Prieto, Sergio L. Toral, and Mario J. Duran. 2019. "Interest and Applicability of Meta-Heuristic Algorithms in the Electrical Parameter Identification of Multiphase Machines" Energies 12, no. 2: 314. https://doi.org/10.3390/en12020314