A Novel Intelligent Method for the State of Charge Estimation of Lithium-Ion Batteries Using a Discrete Wavelet Transform-Based Wavelet Neural Network

 ,
,
Abstract
:1. Introduction
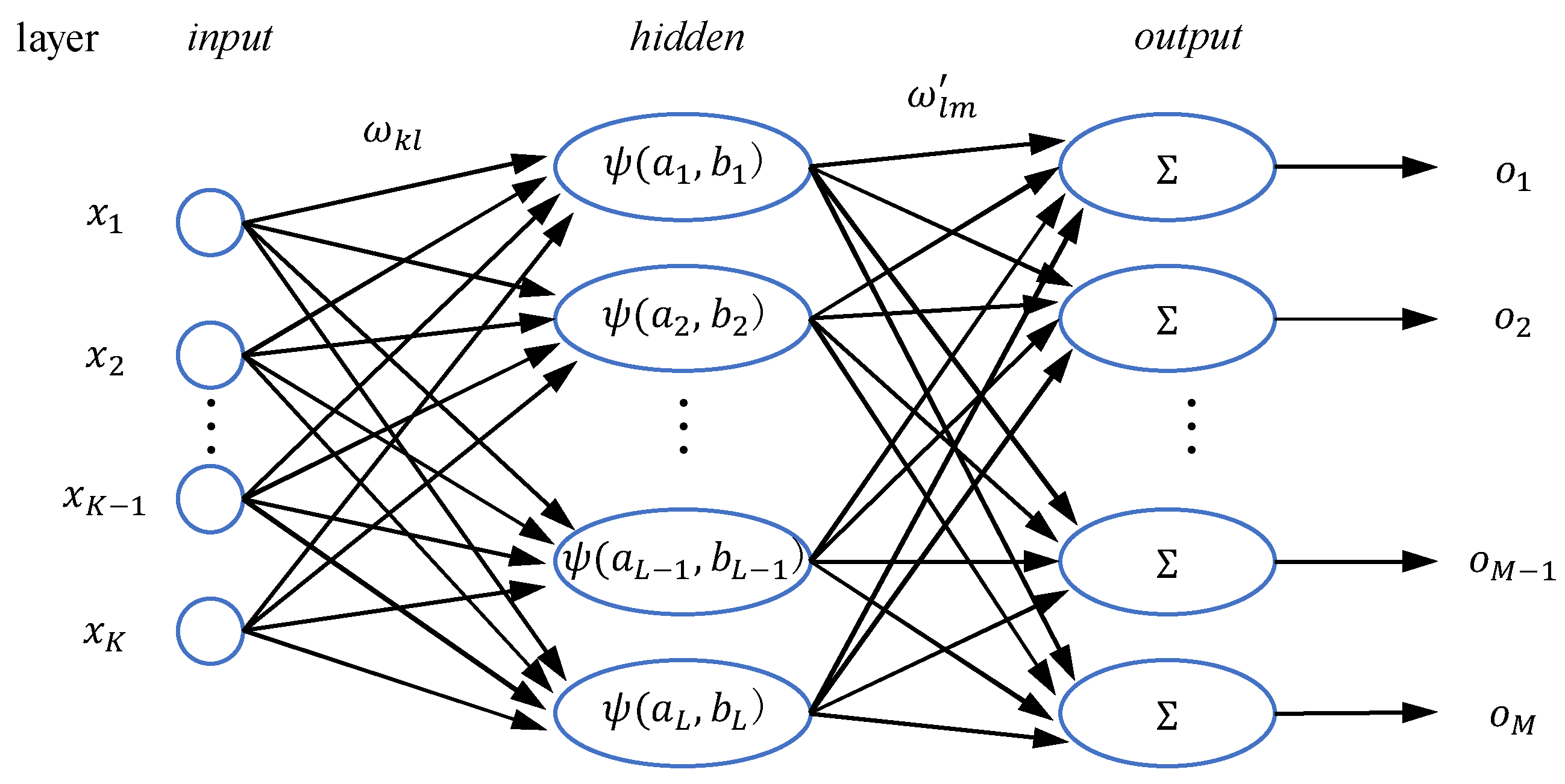
2. Estimation Model Based on WNN
3. L-M Algorithm and Discrete Wavelet Transform
3.1. L-M Algorithm
- Calculate the forward propagation outputs using Equations (2)–(5);
- Calculate equivalent errors of each layer using Equation (39) and
- Calculate the Jacobian matrix using Equation (34) with:
- Update the parameters using Equation (33) and Equations (7)–(10).
- The parameter in Equation (33), which decides the result closer to Gauss-Newton algorithm or the steepest descent algorithm, is multiplied by factor when increases in present iteration; then, turn back to step d. Otherwise, it is divided by when is decreased in present iteration; then, turn to the next iteration process until the maximum iteration. In Section 4.3, is selected as the initial value with .
3.2. Discrete Wavelet Transform
4. Experiments and Discussion
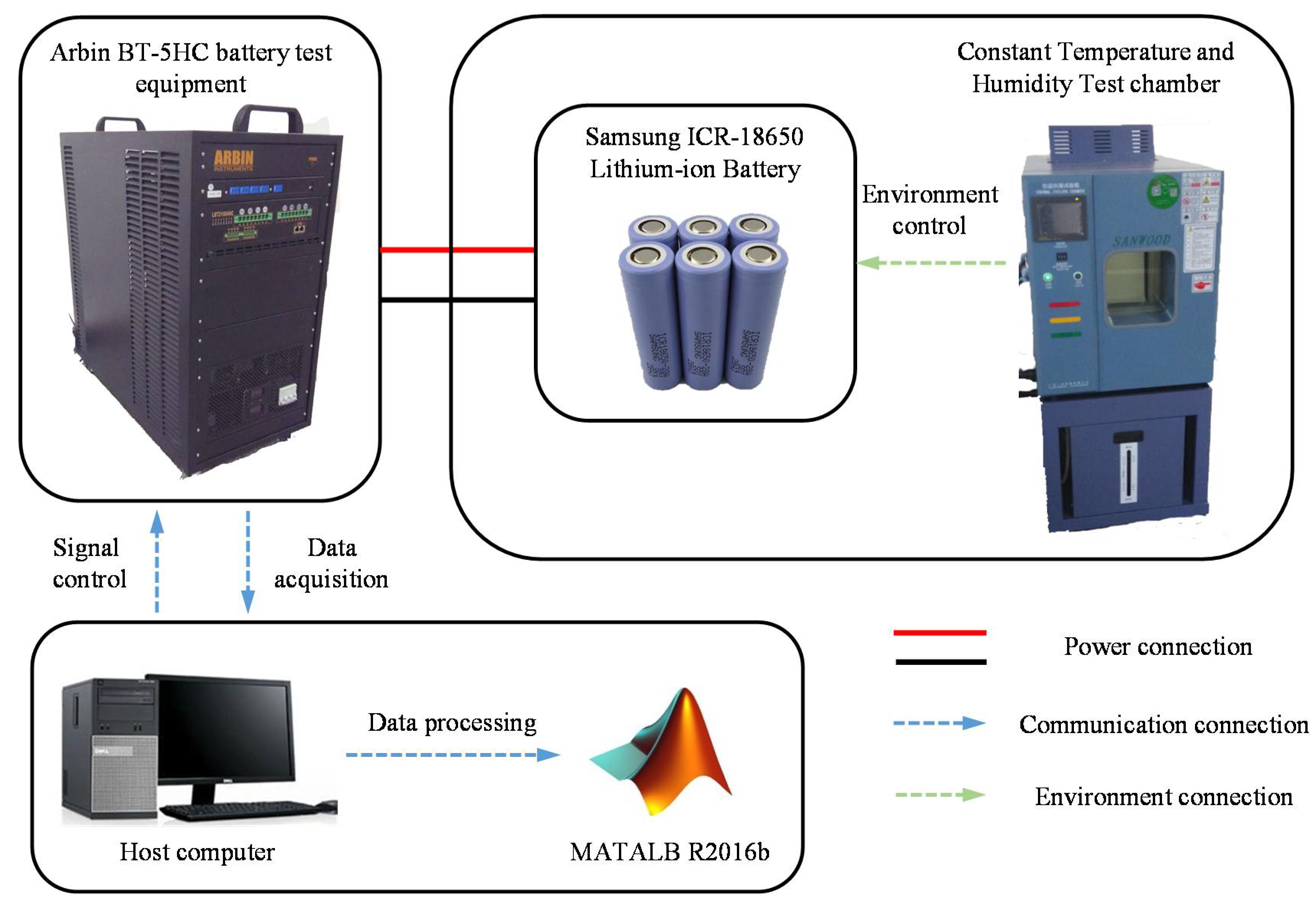
4.1. Test Bench
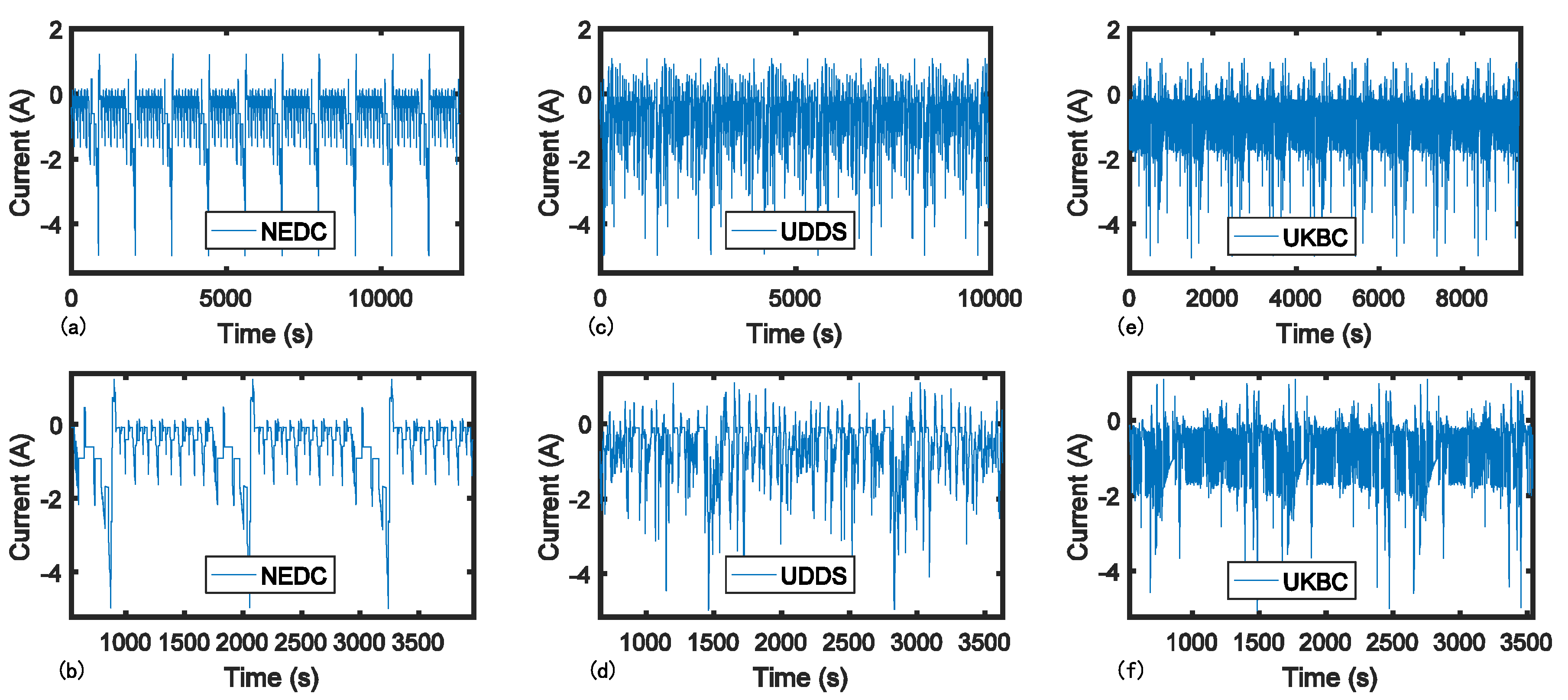
4.2. Data Acquisition
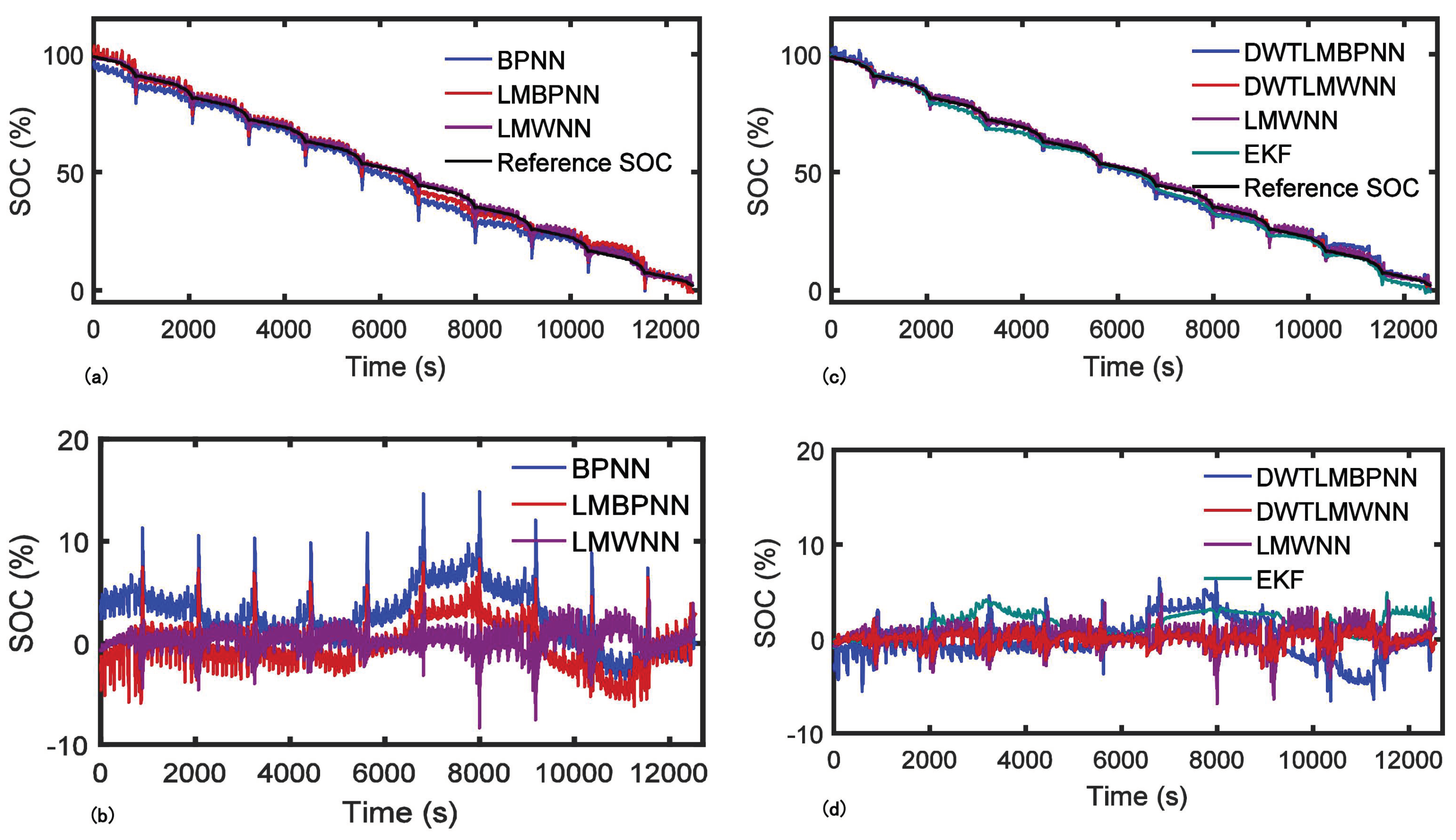
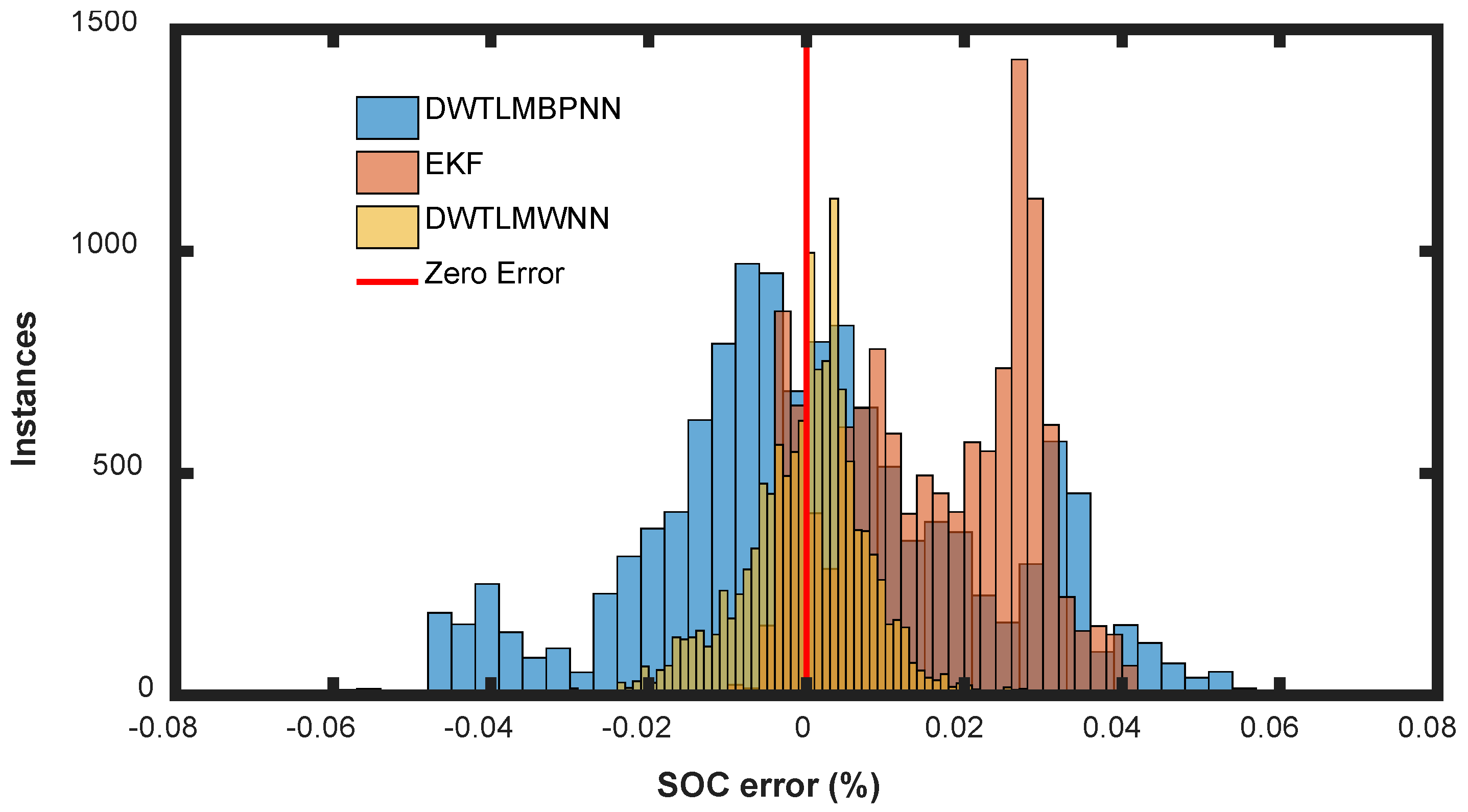
4.3. Method Validation and Comparison Study
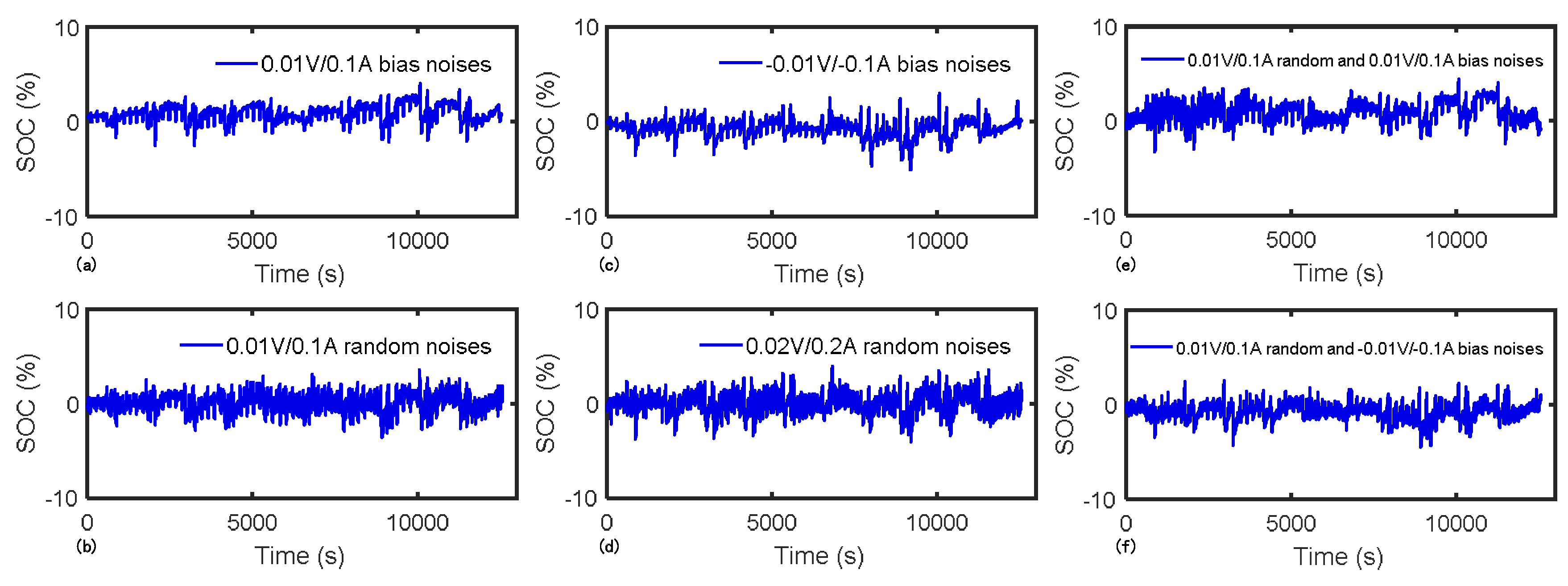
4.4. Robustness Evaluation
4.4.1. Measurement Noise Test
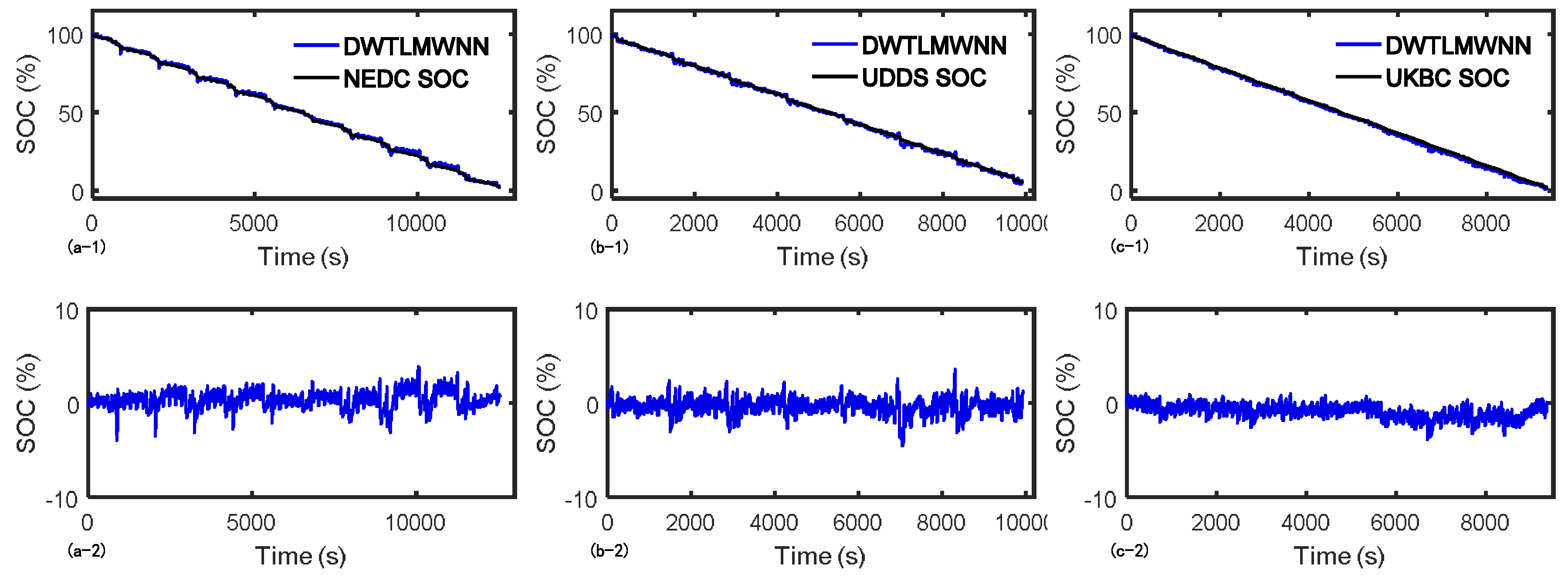
4.4.2. Untrained Driving Cycle Test
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Acronyms | |
| A | Ampere |
| A·h | Ampere-hour |
| ANNs | Artificial neural networks |
| BMS | Battery management system |
| BPNN | Back-propagation neural network |
| CKF | Cubature Kalman Filter |
| DWT | Discrete wavelet transform |
| DWTLMBPNN | Discrete wavelet transform and Levenberg-Marquardt algorithm-based back-propagation neural network |
| DWTLMWNN | Discrete wavelet transform and Levenberg-Marquardt algorithm-based wavelet neural network |
| EKF | Extend Kalman filter |
| EV | Electric vehicle |
| HPPC | The hybrid power pulse characteristics |
| IDWT | Inverse discrete wavelet transform |
| KF | Kalman filter |
| L-M | Levenberg-Marquardt |
| LMBPNN | Levenberg-Marquardt based back-propagation neural network |
| LMWNN | Levenberg-Marquardt based three-layer wavelet neural network |
| MATLAB | Matrix Laboratory |
| MRA | Multi-resolution analysis |
| NEDC | New European Driving Cycle |
| OCV | Open-circuit voltage |
| PF | Particle filter |
| RNN | Radial neural network |
| SMO | Sliding mode observer |
| SOC | State of charge |
| SVM | Support vector machine |
| UDDS | Urban Dynamometer Driving Schedule |
| UKBC | the United Kingdom Bus Cycle |
| UKF | Unscented Kalman filter |
| V | Volt |
| WNN | Wavelet neural network |
| Symbols | |
| a | Wavelet dilation parameter |
| Approximation components of different levels | |
| b | Wavelet translation parameter |
| C1, C2 | Capacitance values of second-order equivalent circuit model |
| Cn | The nominal capacity of the battery [F] |
| Detail components of different levels | |
| Error column vector | |
| E | The output mean square error |
| Parameters which need to be updated | |
| i/I | Current [A] |
| J | Number of decomposition level |
| Jacobian matrix | |
| K, L or M | Total number of the nodes in input layer, hidden layer, or output layer |
| net | Weighted sum value of a node |
| N | Maximum decomposition level |
| o | Output data of the neural network |
| P | The number of total input sets |
| P0 | Predicted covariance |
| Qk | Covariance of observation noise |
| R | The correlation coefficient |
| R0, R1, R2 | Resistance values of second-order equivalent circuit model |
| Rk | Covariance of process noise |
| t | Time [s] |
| t0 | Initial time [s] |
| U | Cell voltage or cell potential [V] |
| The total output mean square error | |
| Input data of the neural network | |
| Output data of the hidden layer | |
| The original signal | |
| , | Tuning parameters of Levenberg-Marquardt algorithm |
| Equivalent error in the steepest descent algorithm | |
| Equivalent error in the Levenberg-Marquardt algorithm | |
| Mother wavelet function | |
| Scaling function | |
| Weight of neural networks between input and hidden layer | |
| Weight of neural networks between hidden and output layer | |
| Subscript | |
| min | Minimum value |
| max | Maximum value |
| k, l or m | Number of the nodes in input layer, hidden layer, or output layer |
| j, k in DWT | Dilation parameter and translation parameter |
| Superscript | |
| Values of hidden layer related to output layer | |
| Values of output layer | |
| Updated value or complex conjugate | |
| First derivative | |
| Abbreviations | |
| mean | Mean absolute error |
| max | Maximum absolute error |
| maximum error | Maximum absolute error |
References
- Zhang, Z.L.; Cheng, X.; Lu, Z.Y.; Gu, D.J. SOC Estimation of Lithium-Ion Batteries with AEKF and Wavelet Transform Matrix. IEEE Trans. Power Electr. 2017, 32, 7626–7634. [Google Scholar] [CrossRef]
- Srivastav, S.; Lacey, M.J.; Brandell, D. State-of-charge indication in Li-ion batteries by simulated impedance spectroscopy. J. Appl. Electrochem. 2017, 47, 229–236. [Google Scholar] [CrossRef]
- Tian, Y.; Li, D.; Tian, J.D.; Xia, B.Z. State of charge estimation of lithium-ion batteries using an optimal adaptive gain nonlinear observer. Electrochim. Acta 2017, 225, 225–234. [Google Scholar] [CrossRef]
- Panchal, S.; Dincer, I.; Agelin-Chaab, M.; Fraser, R.; Fowler, M. Thermal modeling and validation of temperature distributions in a prismatic lithium-ion battery at different discharge rates and varying boundary conditions. Appl. Therm. Eng. 2016, 96, 190–199. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Yang, N.X.; Zhang, X.W.; Li, G.J. State of charge estimation for pulse discharge of a LiFePO4 battery by a revised Ah counting. Electrochim. Acta 2015, 151, 63–71. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Panchal, S.; Dincer, I.; Agelin-Chaab, M.; Fraser, R.; Fowler, M. Experimental and theoretical investigations of heat generation rates for a water cooled LiFePO4 battery. Int. J. Heat Mass Transf. 2016, 101, 1093–1102. [Google Scholar] [CrossRef]
- Lee, J.; Nam, O.; Cho, B.H. Li-ion battery SOC estimation method based on the reduced order extended Kalman filtering. J. Power Sources 2007, 174, 9–15. [Google Scholar] [CrossRef]
- Yuan, S.F.; Wu, H.J.; Yin, C.L. State of Charge Estimation Using the Extended Kalman Filter for Battery Management Systems Based on the ARX Battery Model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Xiong, B.; Zhao, J.; Wei, Z.; Skyllas-Kazacos, M. Extended Kalman filter method for state of charge estimation ofvanadium redox flow battery using thermal-dependent electrical model. J. Power Sources 2014, 262, 50–61. [Google Scholar] [CrossRef]
- Santhanagopalan, S.; White, R.E. Online estimation of the state of charge of a lithium ion cell. J. Power Sources 2006, 161, 1346–1355. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.C.; Pecht, M. State of charge estimation for electric vehicle batteries using unscented kalman filtering. Microelectron. Reliab. 2013, 53, 840–847. [Google Scholar] [CrossRef]
- He, Z.G.; Chen, D.; Pan, C.F.; Chen, L.; Wang, S.H. State of charge estimation of power Li-ion batteries using a hybrid estimation algorithm based on UKF. Electrochim. Acta 2016, 211, 101–109. [Google Scholar]
- Kim, I.S. The novel state of charge estimation method for lithium battery using sliding mode observer. J. Power Sources 2006, 163, 584–590. [Google Scholar] [CrossRef]
- Chen, X.P.; Shen, W.X.; Cao, Z.W.; Kapoor, A. A novel approach for state of charge estimation based on adaptive switching gain sliding mode observer in electric vehicles. J. Power Sources 2014, 246, 667–678. [Google Scholar] [CrossRef]
- Lotfi, N.; Landers, R.G.; Li, J.; Park, J. Reduced-Order Electrochemical Model-Based SOC Observer with Output Model Uncertainty Estimation. IEEE Trans. Control Syst. Technol. 2017, 25, 1217–1230. [Google Scholar] [CrossRef]
- Dey, S.; Ayalew, B.; Pisu, P. Nonlinear Robust Observers for State-of-Charge Estimation of Lithium-Ion Cells Based on a Reduced Electrochemical Model. IEEE Trans. Control Syst. Technol. 2015, 23, 1935–1942. [Google Scholar] [CrossRef]
- Zou, C.F.; Manzie, C.; Nesic, D.; Kallapur, A.G. Multi-time-scale observer design for state-of-charge and state-of-health of a lithium-ion battery. J. Power Sources 2016, 335, 121–130. [Google Scholar] [CrossRef]
- Schwunk, S.; Armbruster, N.; Straub, S.; Kehl, J.; Vetter, M. Particle filter for state of charge and state of health estimation for lithium-iron phosphate batteries. J. Power Sources 2013, 239, 705–710. [Google Scholar] [CrossRef]
- Wang, Y.J.; Zhang, C.B.; Chen, Z.H. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J.; Liaw, B.Y.; Zhang, J. On state-of-charge determination for lithium-ion batteries. J. Power Sources 2017, 348, 281–301. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Inline state of health estimation of lithium-ion batteries using state of charge calculation. J. Power Sources 2015, 299, 246–254. [Google Scholar] [CrossRef]
- Andre, D.; Meiler, M.; Steiner, K.; Walz, H.; Soczka-Guth, T.; Sauer, D.U. Characterization of high-power lithium-ion batteries by electrochemical impedance spectroscopy. II: Modelling. J. Power Sources 2011, 196, 5349–5356. [Google Scholar] [CrossRef]
- Wei, Z.B.; Zou, C.F.; Leng, F.; Soong, B.H.; Tseng, K.J. Online Model Identification and State-of-Charge Estimate for Lithium-Ion Battery With a Recursive Total Least Squares-Based Observer. IEEE Trans. Ind. Electron. 2018, 65, 1336–1346. [Google Scholar] [CrossRef]
- Zou, C.F.; Hu, X.S.; Wei, Z.B.; Tang, X.L. Electrothermal dynamics-conscious lithium-ion battery cell-level charging management via state-monitored predictive control. Energy 2017, 141, 250–259. [Google Scholar] [CrossRef]
- Cheng, B.; Bai, Z.F.; Cao, B.G. State of charge estimation based on evolutionary neural network. Energy Convers. Manag. 2008, 49, 2788–2794. [Google Scholar]
- Dang, X.J.; Yan, L.; Xu, K.; Wu, X.R.; Jiang, H.; Sun, H.X. Open-Circuit Voltage-Based State of Charge Estimation of Lithium-ion Battery Using Dual Neural Network Fusion Battery Model. Electrochim. Acta 2016, 188, 356–366. [Google Scholar] [CrossRef]
- Sbarufatti, C.; Corbetta, M.; Giglio, M.; Cadini, F. Adaptive prognosis of lithium-ion batteries based on the combination of particle filters and radial basis function neural networks. J. Power Sources 2017, 344, 128–140. [Google Scholar] [CrossRef]
- Hansen, T.; Wang, C.J. Support vector based battery state of charge estimator. J. Power Sources 2005, 141, 351–358. [Google Scholar] [CrossRef]
- Zhou, P.W.; Wang, L.J.; Lin, H.P.; Lv, Z.Y. High Accuracy State-of-Charge Online Estimation of EV/HEV Lithium Batteries Based on Adaptive Wavelet Neural Network. In Proceedings of the 2013 IEEE ECCE Asia Downunder (Ecce Asia), Melbourne, VIC, Australia, 3–6 June 2013; pp. 513–517. [Google Scholar]
- Gao, L.; Song, Y.; Dougal, R.A. Wavelet neural network based battery state-of-charge estimation for portable electronics applications. In Proceedings of the Twentieth Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 6–10 March 2005; Volume 2, pp. 998–1002. [Google Scholar]
- Rivera-Barrera, J.P.; Munoz-Galeano, N.; Sarmiento-Maldonado, H.O. SoC Estimation for Lithium-ion Batteries: Review and Future Challenges. Electronics 2017, 6, 102. [Google Scholar] [CrossRef]
- Chen, H.Y.; Liang, J.W. Adaptive Wavelet Neural Network Controller for Active Suppression Control of a Diaphragm-type Pneumatic Vibration Isolator. Int. J. Control Autom. Syst. 2017, 15, 1456–1465. [Google Scholar] [CrossRef]
- Jiao, Z.; Zhang, R. Fault Diagnosis Based on Multi-layer Structure Wavelet Neural Networks in Attitude Heading Reference System. Adv. Dev. Eng. Sci. IV 2014, 1046, 270–274. [Google Scholar] [CrossRef]
- Wei, S.K.; Yang, H.; Song, J.X.; Abbaspour, K.; Xu, Z.X. A wavelet-neural network hybrid modelling approach for estimating and predicting river monthly flows. Hydrol. Sci. J. 2013, 58, 374–389. [Google Scholar] [CrossRef]
- Liu, Z.G.; Wang, Q.; Zhang, Y.J. Combining Multi Wavelet and Multi NN for Power Systems Load Forecasting. In Proceedings of the 5th International Symposium on Neural Networks (ISNN 2008, Ptart 2), Beijing, China, 24–28 September 2008; Volume 5264, pp. 666–673. [Google Scholar]
- Zhang, J.; Gao, X.P.; Li, Y.Q. Efficient wavelet networks for function learning based on adaptive wavelet neuron selection. IET Signal Process. 2012, 6, 79–90. [Google Scholar] [CrossRef]
- Szu, H.H.; Telfer, B.; Kadambe, S. Neural Network Adaptive Wavelets for Signal Representation and Classification. Opt. Eng. 1992, 31, 1907–1916. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J. Discrete wavelet transform-based denoising technique for advanced state-of-charge estimator of a lithium-ion battery in electric vehicles. Energy 2015, 83, 462–473. [Google Scholar] [CrossRef]
- Kim, J.; Chun, C.Y.; Cho, B.H. Implementation of EKF combined with Discrete Wavelet Transform-based MRA for Improved SOC Estimation for a Li-Ion Cell. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 2720–2725. [Google Scholar]
- Kim, J.; Cho, B.H. Application of Wavelet Transform-based Discharging/Charging Voltage Signal Denoising for Advanced Data-Driven SOC Estimator. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 3013–3018. [Google Scholar]
- Kim, J. Cell Seletion through Two-Level Basis Pattern Recognition with Low/High Frequency Components Decomposed by DWT-based MRA. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 906–911. [Google Scholar]
- Tarbi, A.; Atmani, E.H.; Sellam, M.A. Control and diagnostic of the complex impedance of selected perovskite compounds. Opt. Quant. Electron. 2017, 49, 337. [Google Scholar] [CrossRef]
- Das, P.P.; Bisoi, R.; Dash, P.K. Time Series Forecasting Using Fuzzy Functional Link Neural Network Trained By Improved Second Order Levenberg-Marquardt Algorithm. In Proceedings of the 2015 IEEE Power, Communication and Information Technology Conference (PCITC), Bhubaneswar, India, 15–17 October 2015; pp. 827–833. [Google Scholar]
- Kumar, A.; Kumar, R. Least Square Fitting for Adaptive Wavelet Generation and Automatic Prediction of Defect Size in the Bearing Using Levenberg-Marquardt Backpropagation. J. Nondestruct. Eval. 2017, 36, 7. [Google Scholar] [CrossRef]
- Hu, P.; Cao, G.Y.; Zhu, X.J.; Li, J. Modeling of a proton exchange membrane fuel cell based on the hybrid particle swarm optimization with Levenberg-Marquardt neural network. Simul. Model. Pract. Theory 2010, 18, 574–588. [Google Scholar] [CrossRef]
- Kim, J. Discrete Wavelet Transform-Based Feature Extraction of Experimental Voltage Signal for Li-Ion Cell Consistency. IEEE Trans. Veh. Technol. 2016, 65, 1150–1161. [Google Scholar] [CrossRef]
- Sang, Y.F.; Sun, F.B.; Singh, V.P.; Xie, P.; Sun, J. A discrete wavelet spectrum approach for identifying non-monotonic trends in hydroclimate data. Hydrol. Earth Syst. Sci. 2018, 22, 757–766. [Google Scholar] [CrossRef]
- Kim, J.; Cho, B.H. An innovative approach for characteristic analysis and state-of-health diagnosis for a Li-ion cell based on the discrete wavelet transform. J. Power Sources 2014, 260, 115–130. [Google Scholar] [CrossRef]
- Markel, T.; Brooker, A.; Hendricks, I.; Johnson, V.; Kelly, K.; Kramer, B.; O’Keefe, M.; Sprik, S.; Wipke, K. ADVISOR: A systems analysis tool for advanced vehicle modeling. J. Power Sources 2002, 110, 255–266. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | BPNN | LMBPNN | LMWNN | DWT LMBPNN | DWT LMWNN | EKF |
|---|---|---|---|---|---|---|
| Mean absolute error | 3.22% | 1.69% | 0.82% | 1.65% | 0.59% | 1.71% |
| Maximum error | 14.84% | 8.28% | 8.36% | 6.54% | 3.13% | 5.17% |
| R | 0.94937 | 0.99748 | 0.99962 | 0.99716 | 0.99967 | 0.97871 |
| Estimation time | 0.0772 s | 0.0947 s | 0.1362 s | 0.2328 s | 0.2461 s | 0.3276 s |
| Training time | 12.8785 s | 6.0839 s | 13.6264 s | 6.2151 s | 13.7539 s | - |
| Parameters | R0 | R1 | R2 | C1 | C2 |
|---|---|---|---|---|---|
| Values | 0.0377 Ω | 0.0242 Ω | 0.0030 Ω | 1.6733 × 103 F | 1.7823 × 105 F |
| Parameters | Rk | Qk | P0 | ||
| Values | 0.01 | diag (0.001,0.0001,0.0001) | diag (0.01,0.01,0.01) | ||
| Noise Type | DWTLMWNN (Mean/Max) | EKF (Mean/Max) |
|---|---|---|
| 0.01 V/0.1 A bias noises | 1.02%/4.09% | 1.13%/3.32% |
| −0.01 V/−0.1 A bias noises | 0.97%/5.12% | 3.90%/6.97% |
| 0.01 V/0.1 A random noises | 0.66%/3.62% | 2.05%/5.71% |
| 0.02 V/0.2 A random noises | 0.78%/4.09% | 3.61%/11.44% |
| 0.01 V/0.1 A random and 0.01 V/0.1 A bias noises | 1.16%/4.46% | 1.14%/4.74% |
| 0.01 V/0.1 A random and −0.01 V/−0.1 A bias noises | 0.92%/4.50% | 3.99%/9.13% |
| Driving Cycles | NEDC (Mean/Max) | UDDS (Mean/Max) | UKBC (Mean/Max) |
|---|---|---|---|
| DWTLMWNN | 0.72%/3.95% | 0.71%/4.50% | 0.92%/3.83% |
| EKF | 1.71%/5.17% | 2.06%/4.61% | 2.43%/7.68% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, D.; Xia, B.; Zhang, R.; Sun, Z.; Lao, Z.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. A Novel Intelligent Method for the State of Charge Estimation of Lithium-Ion Batteries Using a Discrete Wavelet Transform-Based Wavelet Neural Network. Energies 2018, 11, 995. https://doi.org/10.3390/en11040995
Cui D, Xia B, Zhang R, Sun Z, Lao Z, Wang W, Sun W, Lai Y, Wang M. A Novel Intelligent Method for the State of Charge Estimation of Lithium-Ion Batteries Using a Discrete Wavelet Transform-Based Wavelet Neural Network. Energies. 2018; 11(4):995. https://doi.org/10.3390/en11040995
Chicago/Turabian StyleCui, Deyu, Bizhong Xia, Ruifeng Zhang, Zhen Sun, Zizhou Lao, Wei Wang, Wei Sun, Yongzhi Lai, and Mingwang Wang. 2018. "A Novel Intelligent Method for the State of Charge Estimation of Lithium-Ion Batteries Using a Discrete Wavelet Transform-Based Wavelet Neural Network" Energies 11, no. 4: 995. https://doi.org/10.3390/en11040995