Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Overview on Building and HVAC System Control Methods
- Achieving a high comfort level, concerning thermal, air quality and visual comfort.
- Achieving high energy efficiency and minimizing the running cost of the building.
2.1. Previous Reviews That Consider MPC Only as One among Many Possible Control Methods
2.2. Previous Reviews That Are Entirely Focused on MPC
3. Model Predictive Control
3.1. Framework and Structure
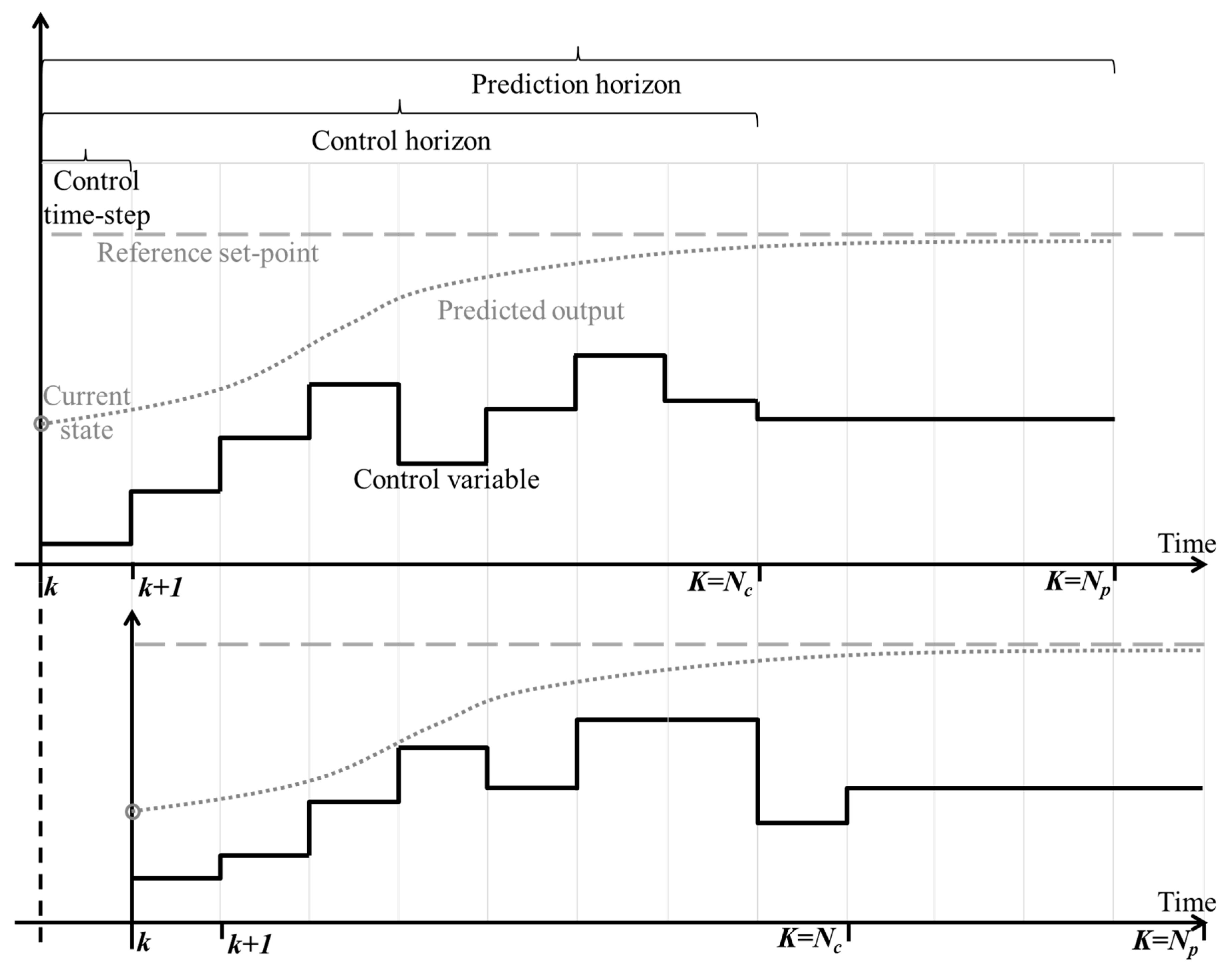
- Current instant (k): the current sampling step the controller is applied.
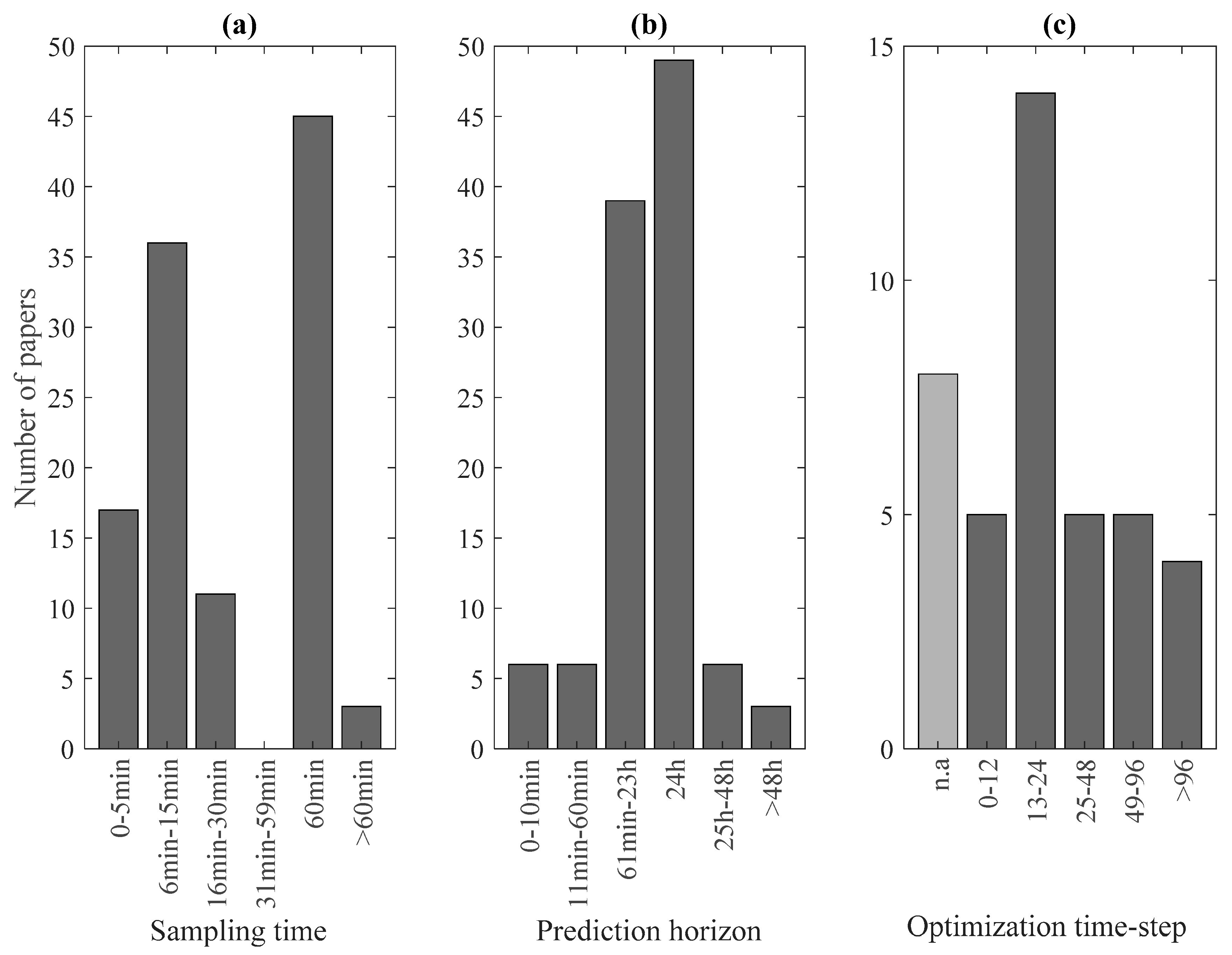
- Control time-step (Ts): it is the time between control updates and iterative receding horizon optimizations. The discrete variable k is generally used to refer to a specific control time-step.
- Prediction horizon (Np) (also referred to as planning horizon): the number of control time-steps the controller looks ahead in the future to optimize the cost function under constraints.
- Control horizon (Nc) (also referred to as execution horizon or manipulated input horizon): the number of possible different values the manipulated variables can take in the future, that relates to the dimension of the optimization vector.
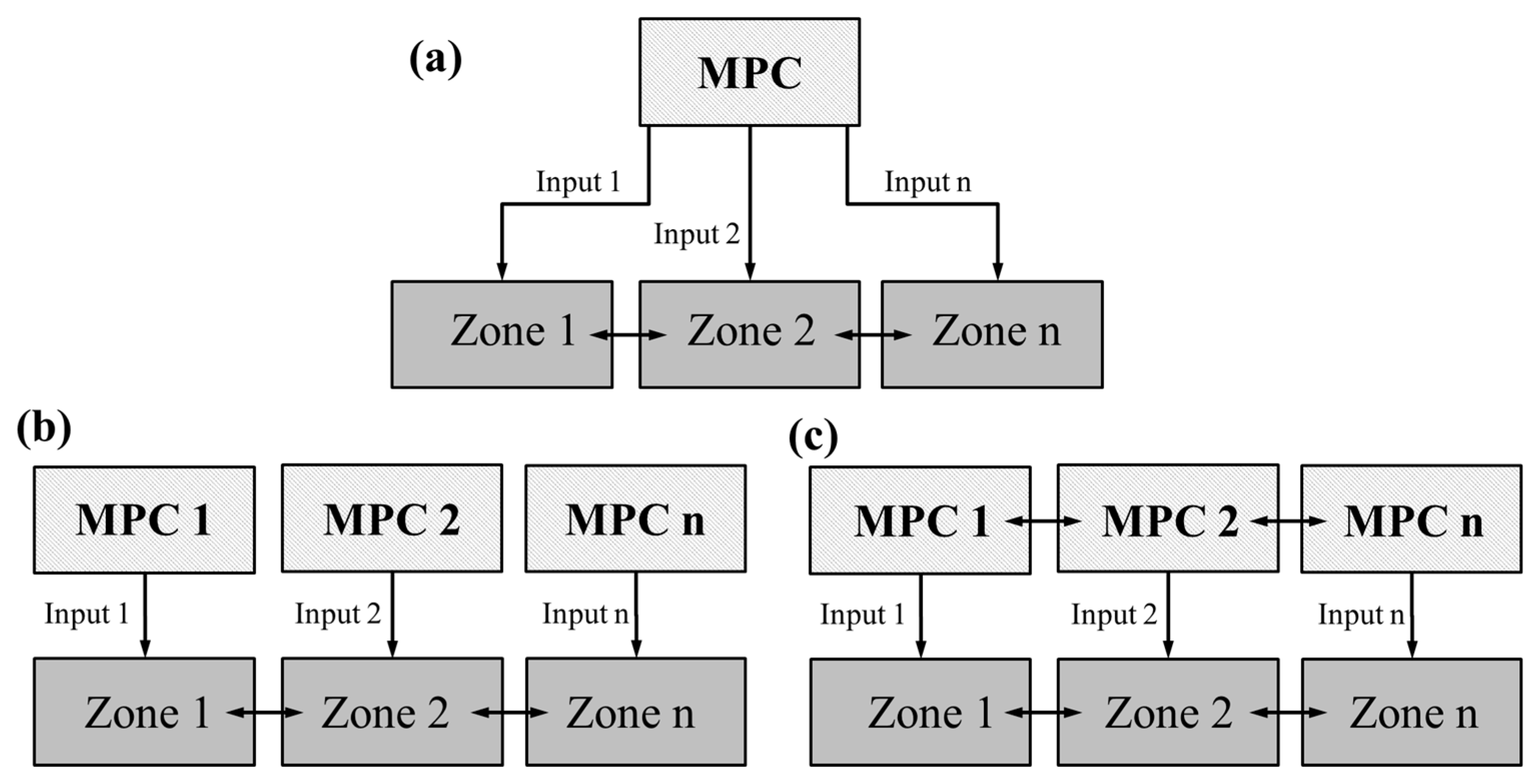
3.2. MPC Typologies
4. Models
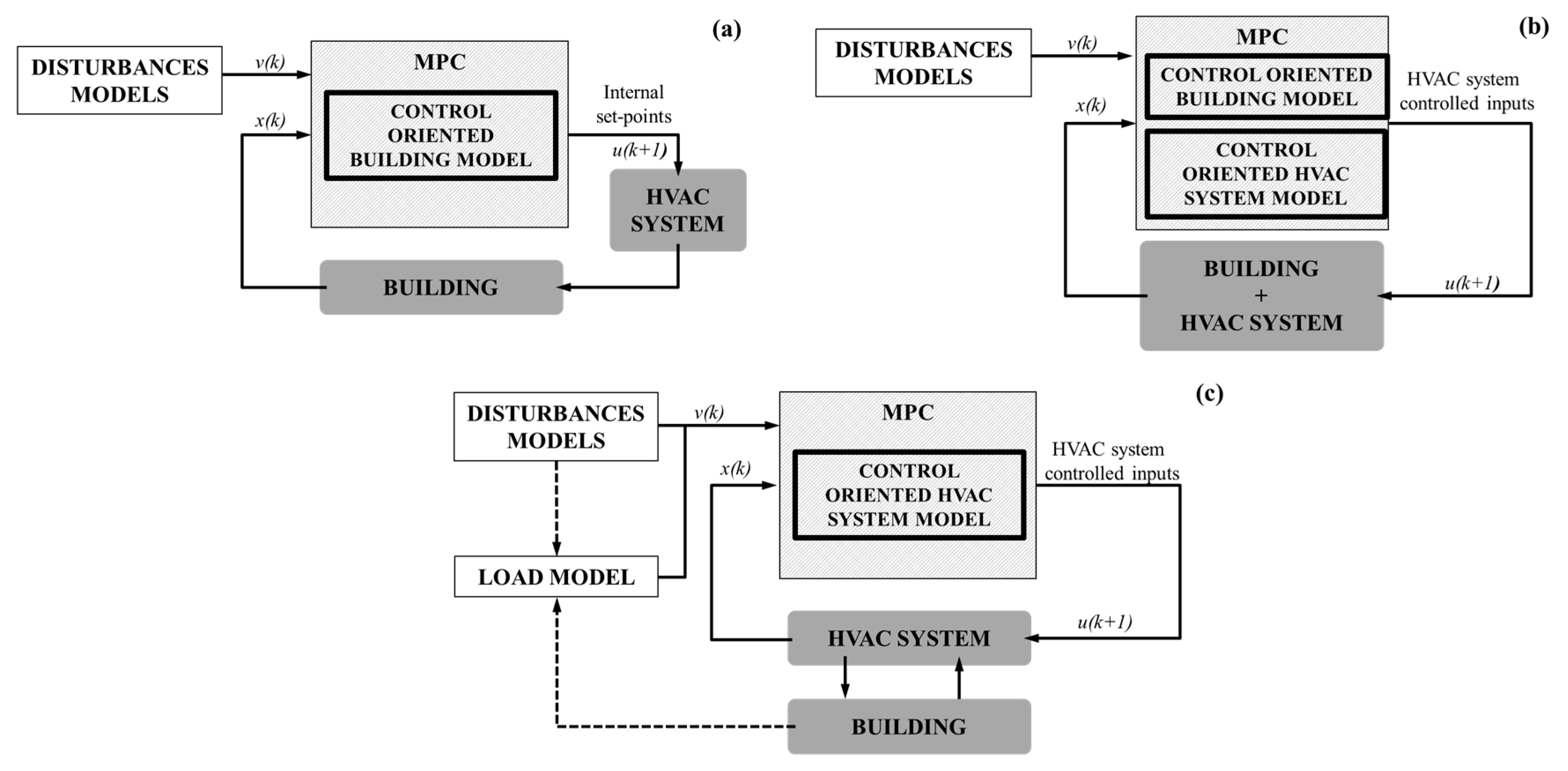
- The control-oriented building and its HVAC system model, which represents the thermodynamical behavior of the building, used by the MPC for the on-line optimization.
- The disturbance models that allow the forecast of the behavior of the uncontrolled variables affecting the dynamic response of the system.
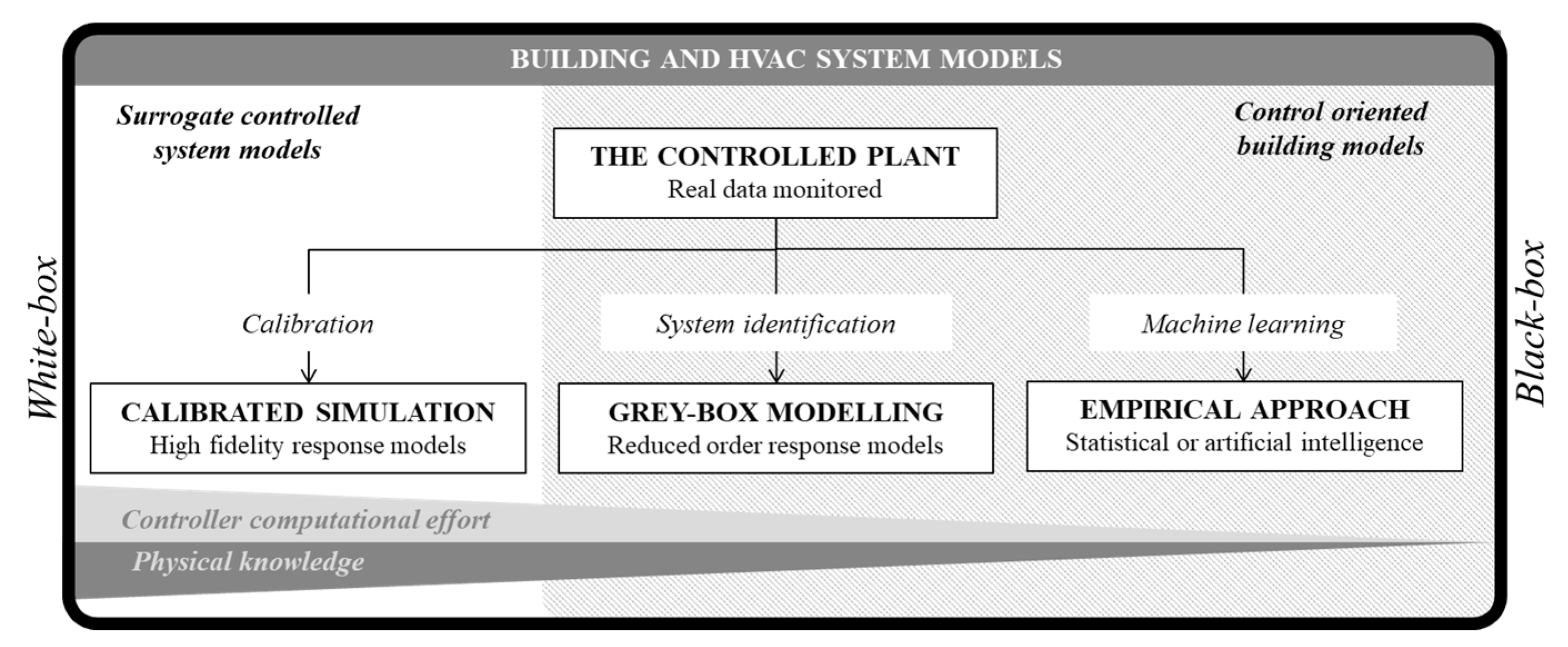
- The surrogate simulated building model that is a virtual, possibly high-accuracy representation of the controlled system needed to close the control loop in simulation.
4.1. Modeling the Building and the HVAC System
- Calibrated simulation models: that are high fidelity response models based on physical principle to calculate thermal dynamics and energy behavior of whole building level or for sublevel components [59]. The approach is the same as the one mentioned in the forward approach, but in this case the models are calibrated using real data gathered on field.
- Black-box models (also known as empirical approach): that are developed by fitting parameters of a model to historical behavior of the system and do not require full knowledge of the system or the process. Black-box models become particularly suitable for predicting the behavior of processes where a priori deterministic knowledge of the physical relationship between input and output is not univocally defined (e.g., evolution of climatic disturbances and occupant behavior related disturbances).
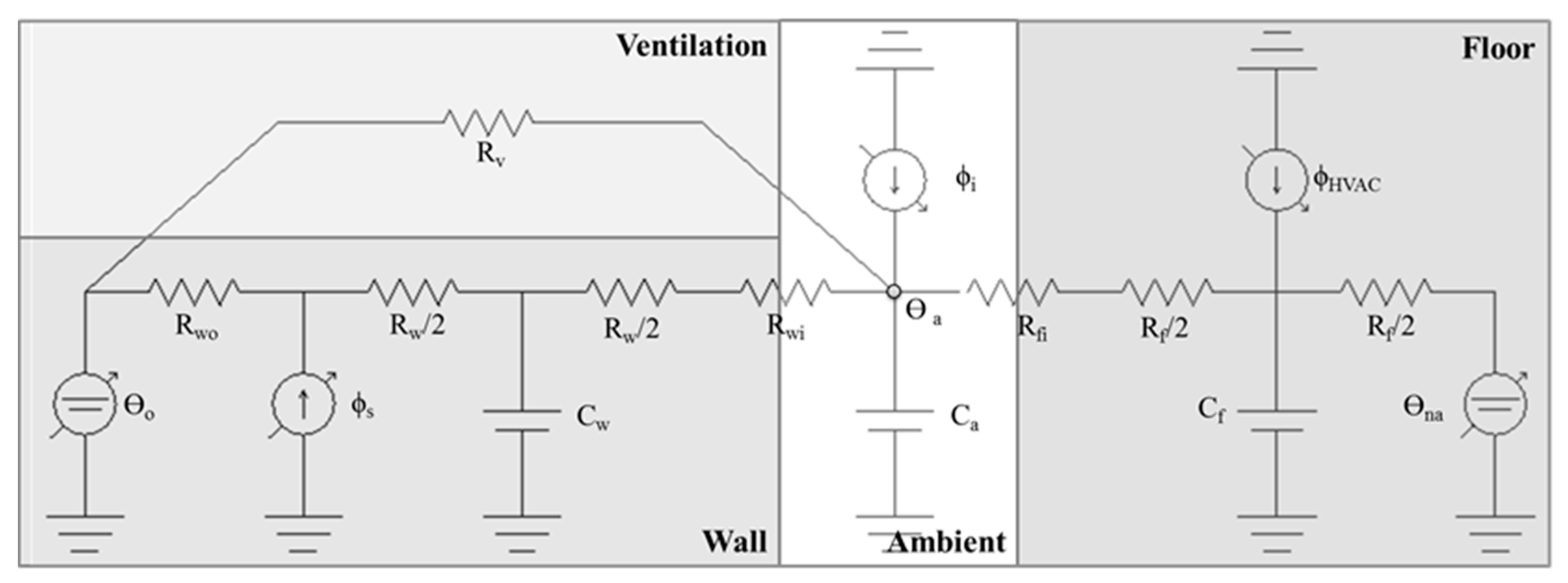
- Grey-box models: that retain the physical description of the system they represent and their parameters can be estimated using system identification methods. Grey-box models have fitting parameters that include the dynamics of the physical system described. Semi-Deterministic Physical Modelling (DSPM) uses a Resistance-Capacitance (R-C) electrical network analogue to explain the thermodynamics of a system. Figure 6 represents an example of R-C modeling of a building. Usually, the model parameters are estimated by tuning to historical measurements, and this approach has been presented in a wide variety of papers [61,62,63,64].
4.2. Modelling the Building and the HVAC System
4.3. The Prediction Models of Disturbances
- Climatic disturbances (e.g., external temperature, humidity ratio, Relative Humidity (RH), wet-bulb temperature, dew-point temperature, solar radiation, wind velocity, ground temperature.
- Occupant behavior related disturbances (e.g., occupied/unoccupied, variation in the scheduled comfort set-points, internal heat gains/loads, adjacent zones set-points).
- Grid and energy distributor related disturbances (e.g., Time of Use (ToU) or real-time prices, peak load penalties).
- Offline predictions do not need an internet connection, and they only rely on the data which has been measured on site, but they require a model that can predict the future disturbances behavior. These methods are compulsory for the forecast of occupancy related disturbances that are specific to each case study [50]. The simplest method for offline predictions is based on a rule of thumb that states that “the conditions of the next hours would be only slightly different from those of the previous time period” [51,95,96]. More accurate offline prediction methods are those based on statistical or machine learning models [95,96,97].
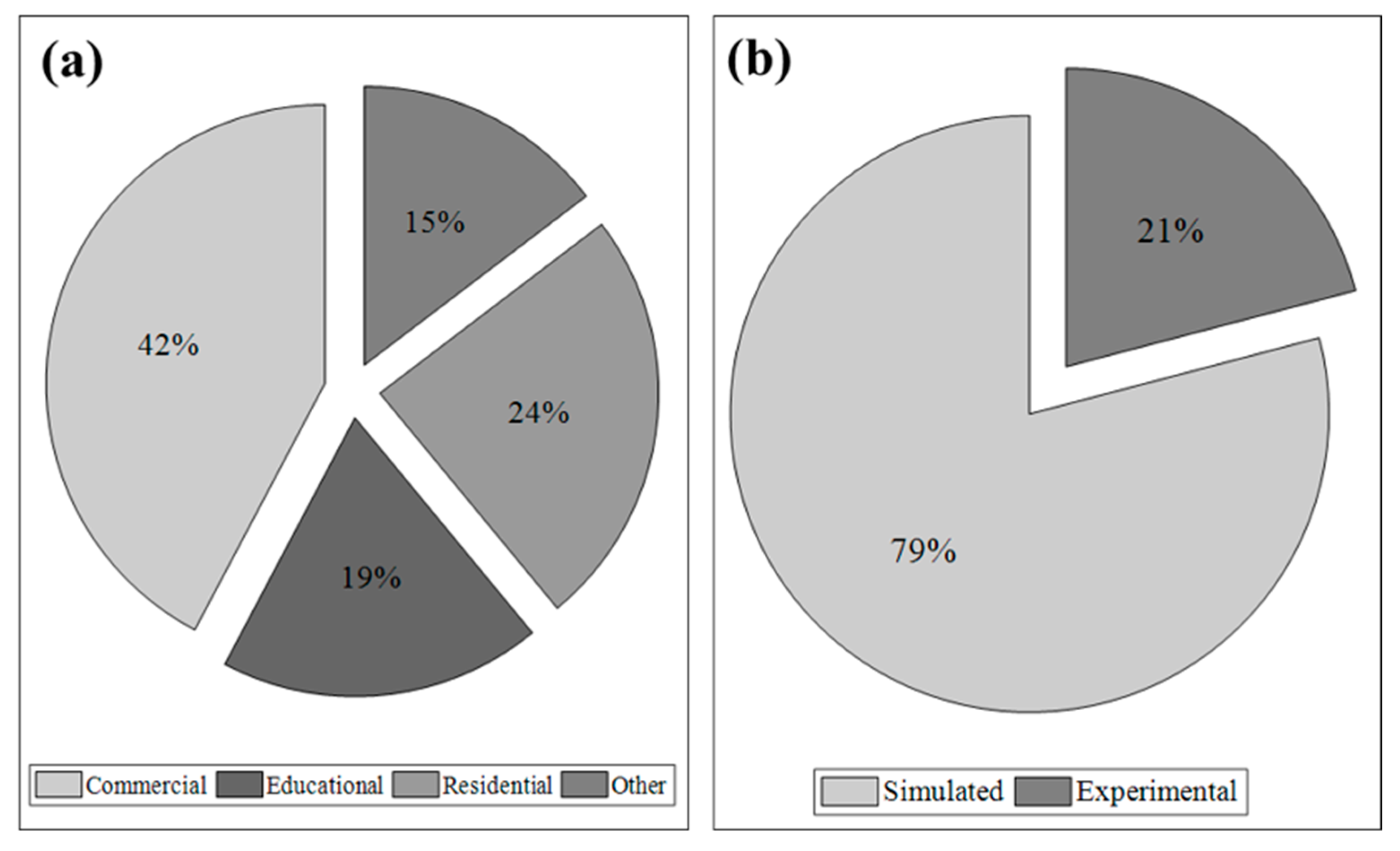
5. The Controlled Systems
6. MPC Parameters That Define the Building Control Law
6.1. The Receding Finite Horizon Problem for Building Applications
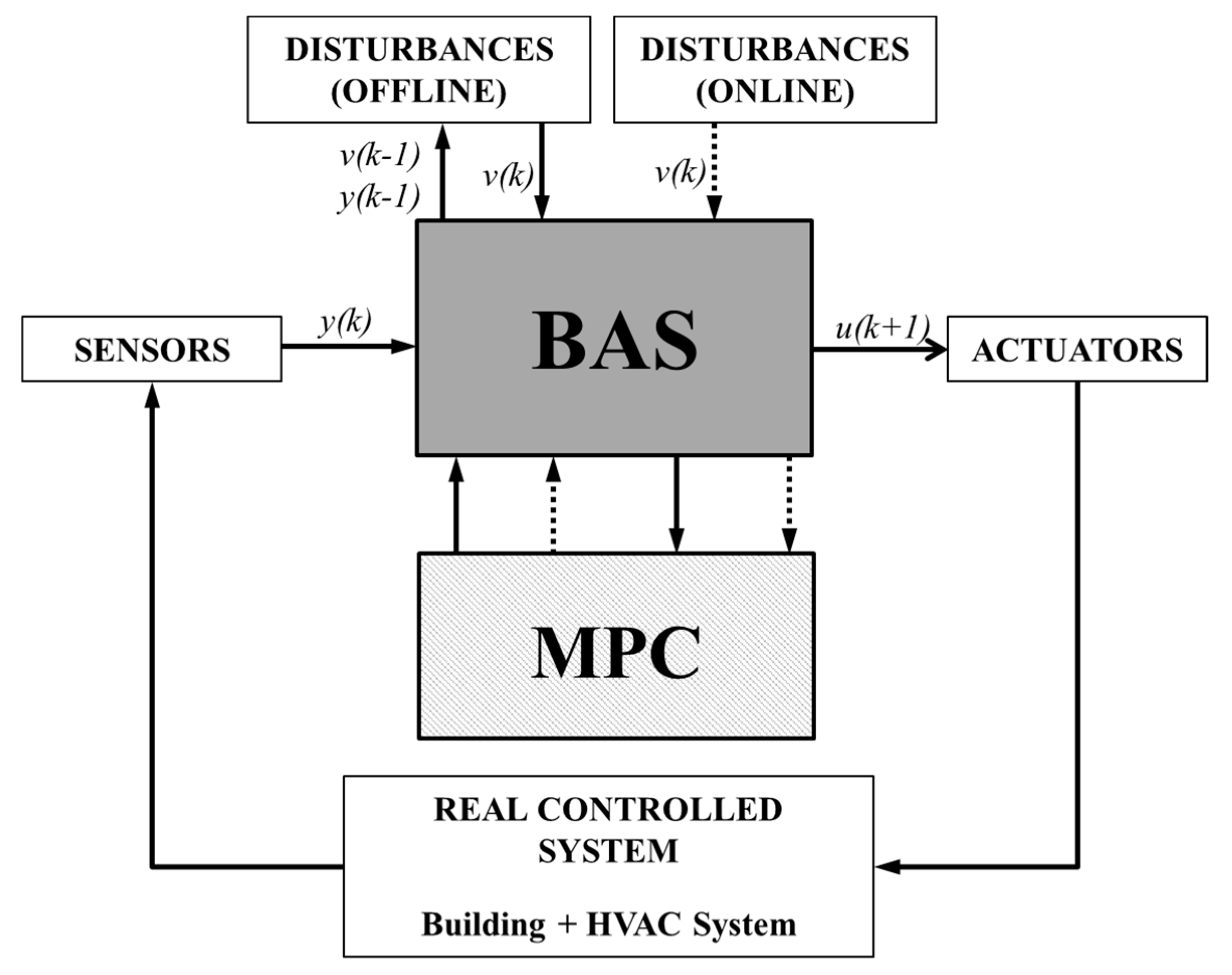
6.2. BAS and MPC Control Architecture
6.3. Constraints
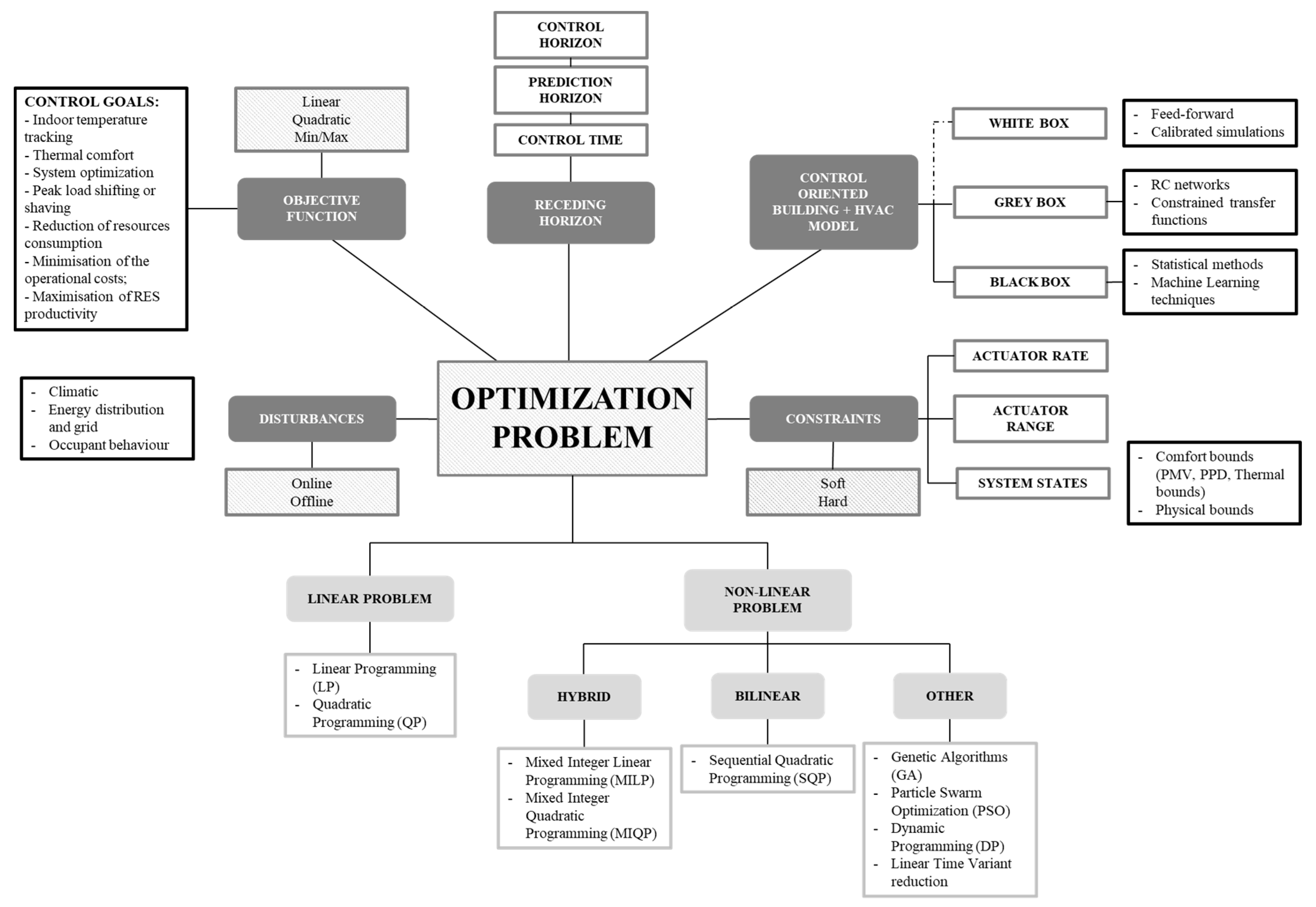
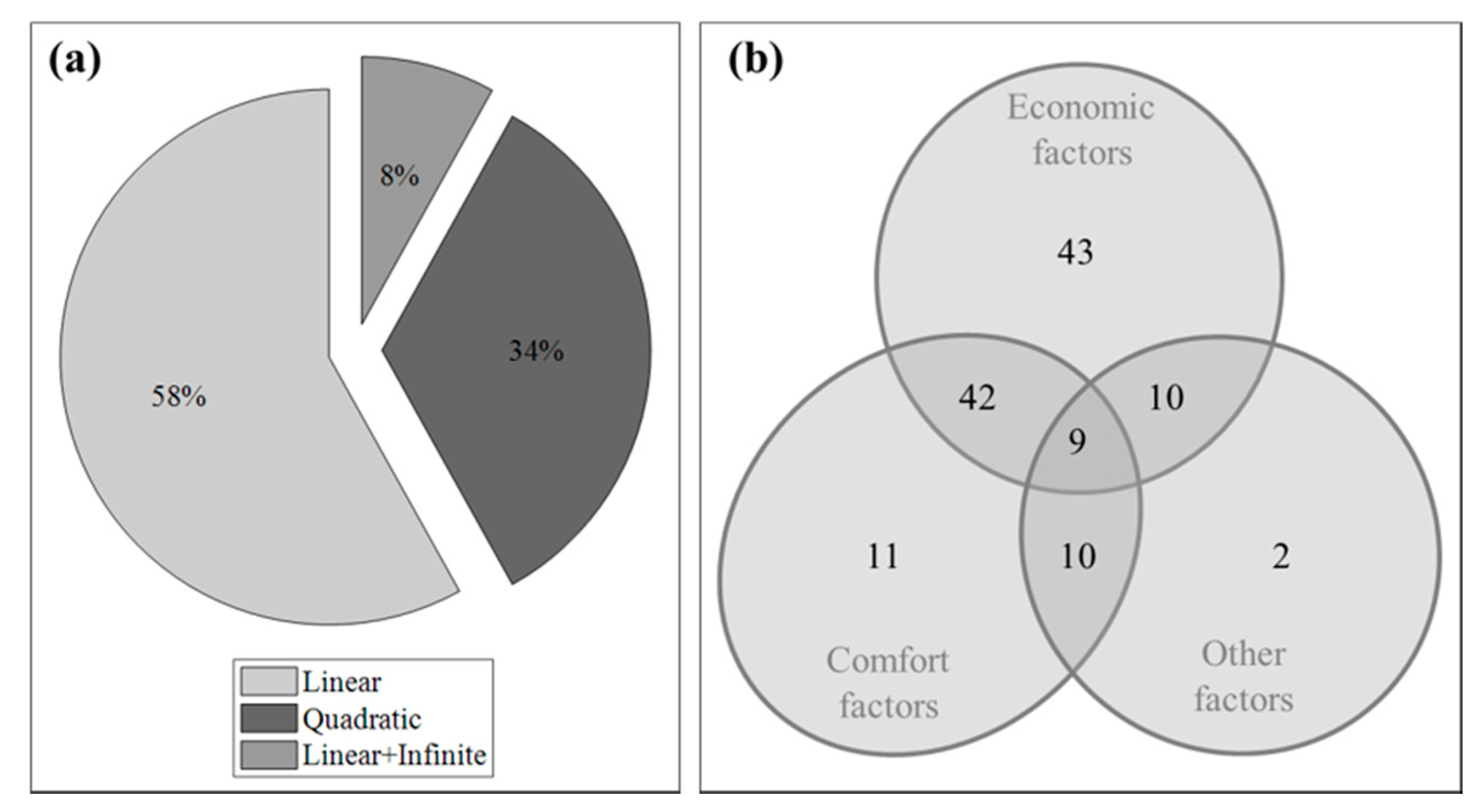
6.4. Control Goals and Objective Functions
- Quadratic, also referred as “norm 2” (n = 2). Quadratic cost functions are more common in tracking MPC problems, where the distance from a reference trajectory (e.g., the internal set-point temperature [117,135]) has to be minimized and the fact that the penalty function is quadratic helps with stability and reduced computational effort of the controller (e.g., the on/off switching of the HVAC system and its components [50,100,105,106,127,136,137,138]).
- Linear, also referred as “norm 1” (n = 1). Linear cost functions are the most common in building energy management in problems where the costs allocated to the elements of the weighting matrices must be comparable with each other, for example when trying to minimize building operating cost or maximize RES exploitation in an economic MPC.
- Min/Max, also referred as “norm infinite” (n = ∞). This configuration is the less frequent for building and its HVAC system control purposes. It is mainly used when the control goals focus on the peak values [108,139,140,141,142,143,144,145], such as reducing or shifting the power peak load or minimizing the maximum daily PPD value [75].
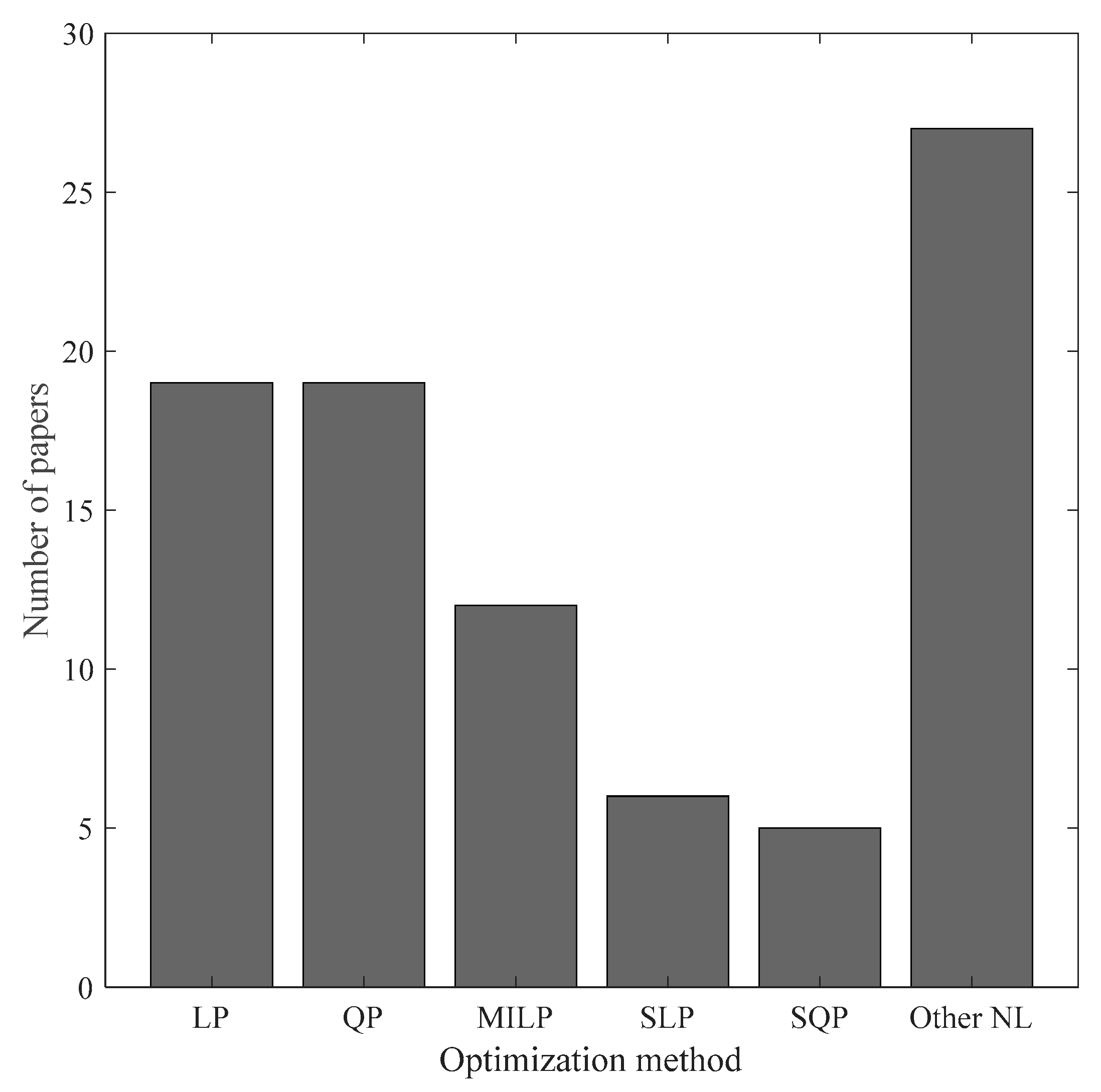
6.5. Optimisation Algorithms and Programming Languages
7. Critical Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Energy Information Administration (EIA). 2012 Commercial Buildings Energy Consumption Survey Data; EIA: Washington, DC, USA, 2012. [Google Scholar]
- International Energy Agency (IEA). Technology Roadmap: Energy-Effcient Buildings: Heating and Cooling Equipment; IEA: Washington, DC, USA, 2012. [Google Scholar]
- Shaikh, P.H.; Nor, N.B.M.; Nallagownden, P.; Elamvazuthi, I.; Ibrahim, T. A review on optimized control systems for building energy and comfort management of smart sustainable buildings. Renew. Sustain. Energy Rev. 2014, 34, 409–429. [Google Scholar] [CrossRef]
- Sandoval, D.; Goffin, P.; Leibundgut, H. How low exergy buildings and distributed electricity storage can contribute to flexibility within the demand side. Appl. Energy 2017, 187, 116–127. [Google Scholar] [CrossRef]
- Gelazanskas, L.; Gamage, K.A.A. Demand side management in smart grid : A review and proposals for future direction. Sustain. Cities Soc. 2014, 11, 22–30. [Google Scholar] [CrossRef]
- Lawrence, T.M.; Boudreau, M.; Helsen, L.; Henze, G.; Mohammadpour, J.; Noonan, D.; Patteeuw, D.; Pless, S.; Watson, R.T. Ten questions concerning integrating smart buildings into the smart grid. Build. Environ. 2016, 108, 273–283. [Google Scholar] [CrossRef]
- Aste, N.; Manfren, M.; Marenzi, G. Building Automation and Control Systems and performance optimization: A framework for analysis. Renew. Sustain. Energy Rev. 2017, 75, 313–330. [Google Scholar] [CrossRef]
- Molina-solana, M.; Ros, M.; Ruiz, M.D.; Gómez-romero, J. Data science for building energy management: A review. Renew. Sustain. Energy Rev. 2017, 70, 598–609. [Google Scholar] [CrossRef]
- Capozzoli, A.; Grassi, D.; Piscitelli, M.S.; Serale, G. Discovering knowledge from a residential building stock through data mining analysis for engineering sustainability. Energy Procedia 2015, 83, 370–379. [Google Scholar] [CrossRef]
- Dounis, A.I.; Caraiscos, C. Advanced control systems engineering for energy and comfort management in a building environment—A review. Renew. Sustain. Energy Rev. 2009, 13, 1246–1261. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Parisio, A.; Jones, C.N.; Gyalistras, D.; Gwerder, M.; Stauch, V.; Lehmann, B.; Morari, M. Use of model predictive control and weather forecasts for energy efficient building climate control. Energy Build. 2012, 45, 15–27. [Google Scholar] [CrossRef]
- Chen, C.; Wang, J.; Member, S.; Heo, Y.; Kishore, S. MPC-Based Appliance Scheduling for Residential Building Energy Management Controller. IEEE Trans. Smart Grid 2013, 4, 1401–1410. [Google Scholar] [CrossRef]
- Perez, K.X.; Baldea, M.; Edgar, T.F. Integrated HVAC management and optimal scheduling of smart appliances for community peak load reduction. Energy Build. 2016, 123, 34–40. [Google Scholar] [CrossRef]
- Parisio, A.; Wiezorek, C.; Kyntäjä, T.; Elo, J.; Johansson, K.H. An MPC-based Energy Management System for Multiple Residential Microgrids. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 7–14. [Google Scholar]
- Molderink, A.; Bakker, V.; Bosman, M.G.C.; Hurink, J.L.; Smit, G.J.M. On the effects of MPC on a domestic energy efficiency optimization methodology. In Proceedings of the 2010 IEEE International Energy Conference and Exhibition (EnergyCon), Manama, Bahrain, 18–22 December 2010; pp. 120–125. [Google Scholar]
- Zong, Y.; Bindner, H.W.; Gehrke, O. Different Optimal Control Strategies for Exploitation of Demand Response in the Smart Grid. IFAC Proc. Vol. 2012, 45, 188–193. [Google Scholar] [CrossRef]
- Youssef, K.H. Optimal management of unbalanced smart microgrids for scheduled and unscheduled multiple transitions between grid-connected and islanded modes. Electr. Power Syst. Res. 2016, 141, 104–113. [Google Scholar] [CrossRef]
- Alejandro, J.; Arce, A.; Bordons, C. Electrical Power and Energy Systems Combined environmental and economic dispatch of smart grids using distributed model predictive control. Int. J. Electr. Power Energy Syst. 2014, 54, 65–76. [Google Scholar]
- Larsen, G.K.H.; Van Foreest, N.D.; Scherpen, J.M.A. Power supply—Demand balance in a Smart Grid: An information sharing model for a market mechanism. Appl. Math. Model. 2014, 38, 3350–3360. [Google Scholar] [CrossRef]
- Mirakhorli, A.; Dong, B. Occupancy behavior based model predictive control for building indoor climate—A critical review. Energy Build. 2016, 129, 499–513. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-Sharifi, F. Theory and applications of HVAC control systems—A review of model predictive control (MPC). Build. Environ. 2014, 72, 343–355. [Google Scholar] [CrossRef]
- Hilliard, T.; Kavgic, M.; Swan, L. Model predictive control for commercial buildings: Trends and opportunities. Adv. Build. Energy Res. 2016, 10, 172–190. [Google Scholar] [CrossRef]
- American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE). 2013 ASHRAE Handbook—Fundamentals (SI Edition); American Society of Heating, Refrigerating and Air-Conditioning Engineers, Inc.: Atlanta, GA, USA, 2013. [Google Scholar]
- American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE). 2015 ASHRAE Handbook—HVAC Applications; American Society of Heating, Refrigerating and Air-Conditioning Engineers, Inc.: Atlanta, GA, USA, 2015. [Google Scholar]
- Prívara, S.; Cigler, J.; Váňa, Z.; Oldewurtel, F.; Sagerschnig, C.; Žáčeková, E. Building modeling as a crucial part for building predictive control. Energy Build. 2013, 56, 8–22. [Google Scholar] [CrossRef]
- López, A.; Sánchez, L.; Doctor, F.; Hagras, H.; Callaghan, V. An evolutionary algorithm for the off-line data driven generation of fuzzy controllers for intelligent buildings. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; Volume 1, pp. 42–47. [Google Scholar]
- Hagras, H.; Packharn, I.; Vanderstockt, Y.; McNulty, N.; Vadher, A.; Doctor, F. An intelligent agent based approach for energy management in commercial buildings. In Proceedings of the 2008 IEEE International Conference on Fuzzy Systems (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 156–162. [Google Scholar]
- Beghi, A.; Cecchinato, L.; Rampazzo, M.; Simmini, F. Load forecasting for the efficient energy management of HVAC systems. In Proceedings of the 2010 IEEE International Conference on Sustainable Energy Technologies (ICSET), Kandy, Sri Lanka, 6–9 December 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Curtiss, P.S. Examples of Neural Networks Used for Building System Control and Energy Management. In Proceedings of the American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE) Annual Meeting, Boston, MA, USA, 28 June–2 July 1997; Volume 103, pp. 909–913. [Google Scholar]
- Huang, W.; Lam, H.N. Using genetic algorithms to optimize controller parameters for HVAC systems. Energy Build. 1997, 26, 277–282. [Google Scholar] [CrossRef]
- Alcala, R.; Benitez, J.M.; Casillas, J.; Cordon, O.; Perez, R. Fuzzy control of HVAC systems optimized by genetic algorithms. Appl. Intell. 2003, 18, 155–177. [Google Scholar] [CrossRef]
- Platt, G.; Li, J.; Li, R.; Poulton, G.; James, G.; Wall, J. Adaptive HVAC zone modeling for sustainable buildings. Energy Build. 2010, 42, 412–421. [Google Scholar] [CrossRef]
- Nassif, N. Modeling and optimization of HVAC systems using artificial neural network and genetic algorithm. Build. Simul. 2013, 7, 237–245. [Google Scholar] [CrossRef]
- Arabali, A.; Ghofrani, M.; Etezadi-Amoli, M.; Fadali, M.S.; Baghzouz, Y. Genetic-algorithm-based optimization approach for energy management. IEEE Trans. Power Deliv. 2013, 28, 162–170. [Google Scholar] [CrossRef]
- Chenari, B.; Dias Carrilho, J.; Gameiro Da Silva, M. Towards sustainable, energy-efficient and healthy ventilation strategies in buildings: A review. Renew. Sustain. Energy Rev. 2016, 59, 1426–1447. [Google Scholar] [CrossRef]
- Atam, E.; Helsen, L. Ground-coupled heat pumps: Part 1—Literature review and research challenges in modeling and optimal control. Renew. Sustain. Energy Rev. 2016, 54, 1653–1667. [Google Scholar] [CrossRef]
- Yu, Z.; Huang, G.; Haghighat, F.; Li, H.; Zhang, G. Control strategies for integration of thermal energy storage into buildings: State-of-the-art review. Energy Build. 2015, 106, 203–215. [Google Scholar] [CrossRef]
- Firląg, S.; Yazdanian, M.; Curcija, C.; Kohler, C.; Vidanovic, S.; Hart, R.; Czarnecki, S. Control algorithms for dynamic windows for residential buildings. Energy Build. 2015, 109, 157–173. [Google Scholar] [CrossRef]
- Wang, S.; Ma, Z. Supervisory and Optimal Control of Building HVAC Systems: A Review. HVAC&R Res. 2007, 14, 3–32. [Google Scholar]
- Esther, B.P.; Kumar, K.S. A survey on residential Demand Side Management architecture, approaches, optimization models and methods. Renew. Sustain. Energy Rev. 2016, 59, 342–351. [Google Scholar] [CrossRef]
- Lazos, D.; Sproul, A.B.; Kay, M. Optimisation of energy management in commercial buildings with weather forecasting inputs: A review. Renew. Sustain. Energy Rev. 2014, 39, 587–603. [Google Scholar] [CrossRef]
- Naidu, D.S.; Rieger, C. Advanced control strategies for heating, ventilation, air-conditioning, and refrigeration systems—An overview: Part I: Hard control. HVAC&R Res. 2011, 17, 2–21. [Google Scholar]
- Kavgic, M.; Hilliard, T.; Swan, L. Opportunities for implementation of MPC in commercial buildings. Energy Procedia 2015, 78, 2148–2153. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-sharifi, F.; Fung, A.S.; Raahemifar, K. Artificial neural network (ANN) based model predictive control (MPC) and optimization of HVAC systems: A state of the art review and case study of a residential HVAC system. Energy Build. 2017, 141, 96–113. [Google Scholar] [CrossRef]
- Killian, M.; Kozek, M. Ten questions concerning model predictive control for energy efficient buildings. Build. Environ. 2016, 105, 403–412. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design, 5th ed.; Nob Hill Pub: Madison, WI, USA, 2012. [Google Scholar]
- Camacho, E.F.; Bordons, C.A. Model Predictive Control, 2nd ed.; Springer: London, UK, 2007. [Google Scholar]
- Bemporad, A.; Morari, M. Robust model predictive control: A survey. Lect. Notes Control Inf. Sci. 2007, 245, 207–226. [Google Scholar]
- Bernardini, D.; Bemporad, A. Stabilizing model predictive control of stochastic constrained linear systems. IEEE Trans. Autom. Control 2012, 57, 1468–1480. [Google Scholar] [CrossRef]
- Mady, A.E.; Provan, G.M.; Ryan, C.; Brown, K.N. Stochastic Model Predictive Controller for the Integration of Building Usage and Temperature Regulation. In Proceedings of the Twenty-Fifth AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 7–11 August 2011; pp. 1371–1376. [Google Scholar]
- Oldewurtel, F.; Parisio, A.; Jones, C.N.; Morari, M.; Gyalistras, D.; Gwerder, M.; Stauch, V.; Lehmann, B.; Wirth, K. Energy efficient building climate control using Stochastic Model Predictive Control and weather predictions. In Proceedings of the American Control Conference (ACC), Baltimore, MD, USA, 30 June–2 July 2010. [Google Scholar]
- Ma, J.; Qin, S.J.; Salsbury, T. Application of economic MPC to the energy and demand minimization of a commercial building. J. Process Control 2014, 24, 1282–1291. [Google Scholar] [CrossRef]
- Tran, T.; Ling, K.-V.; Maciejowski, J.M. Economic Model Predictive Control—A Review. In Proceedings of the 31st International Symposiumon Automationand Roboticsin Constructionand Mining (ISARC), Sydney, Australia, 9–11 July 2014; pp. 1–8. [Google Scholar]
- Bemporad, A.; Morari, M. Control of systems integrating logic, dynamics, and constraints. Automatica 1999, 35, 407–427. [Google Scholar] [CrossRef]
- Bemporad, A. A multiparametric quadratic programming algorithm with polyhedral computations based on nonnegative least squares. IEEE Trans. Autom. Control 2015, 60, 2892–2903. [Google Scholar] [CrossRef]
- Li, Z.; Han, Y.; Xu, P. Methods for benchmarking building energy consumption against its past or intended performance: An overview. Appl. Energy 2014, 124, 325–334. [Google Scholar] [CrossRef]
- Zhao, H.; Magoulès, F. A review on the prediction of building energy consumption. Renew. Sustain. Energy Rev. 2012, 16, 3586–3592. [Google Scholar] [CrossRef]
- Wang, S.; Yan, C.; Xiao, F. Quantitative energy performance assessment methods for existing buildings. Energy Build. 2012, 55, 873–888. [Google Scholar] [CrossRef]
- Magoulès, F.; Zhao, H. Data Mining and Machine Learning in Building Energy Analysis: Towards High Performance Computing, 1st ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Capozzoli, A.; Cerquitelli, T.; Piscitelli, M. Enhancing energy efficiency in buildings through innovative data analytics technologies. In Next Generation Platforms for Intelligent Data Collection; Dobre, C., Xhafa, F., Eds.; Elsevier: Cambridge, MA, USA, 2016; pp. 353–389. [Google Scholar]
- Privara, S.; Vana, Z.; Zacekova, E.; Cigler, J. Building modeling: Selection of the most appropriate model for predictive control. Energy Build. 2012, 55, 341–350. [Google Scholar] [CrossRef]
- Ma, Y.; Borrelli, F.; Hencey, B.; Coffey, B.; Bengea, S.; Haves, P. Model Predictive Control for the Operation of Building Cooling Systems. IEEE Trans. Control Syst. Technol. 2012, 20, 796–803. [Google Scholar]
- Gyalistras, D.; Gwerder, M. Use of Weather and Occupancy Forecasts for Optimal Building Climate Control (OptiControl): Two Years Progress Report; ETH Zurich: Zurich, Switzerland, 2009. [Google Scholar]
- Verhelst, C.; Logist, F.; Van Impe, J.; Helsen, L. Study of the optimal control problem formulation for modulating air-to-water heat pumps connected to a residential floor heating system. Energy Build. 2012, 45, 43–53. [Google Scholar] [CrossRef]
- Li, X.; Wen, J. Review of building energy modeling for control and operation. Renew. Sustain. Energy Rev. 2014, 37, 517–537. [Google Scholar] [CrossRef]
- Fiorentini, M.; Cooper, P.; Ma, Z. Development and optimization of an innovative HVAC system with integrated PVT and PCM thermal storage for a net-zero energy retrofitted house. Energy Build. 2015, 94, 21–32. [Google Scholar] [CrossRef]
- Fiorentini, M.; Cooper, P.; Ma, Z.; Robinson, D.A. Hybrid model predictive control of a residential HVAC system with PVT energy generation and PCM thermal storage. Energy Procedia 2015, 83, 21–30. [Google Scholar] [CrossRef]
- Fiorentini, M.; Wall, J.; Ma, Z.; Braslavsky, J.H.; Cooper, P. Hybrid model predictive control of a residential HVAC system with on-site thermal energy generation and storage. Appl. Energy 2017, 187, 465–479. [Google Scholar] [CrossRef]
- Parisio, A.; Fabietti, L.; Molinari, M.; Varagnolo, D.; Johansson, K.H. Control of HVAC systems via scenario-based explicit MPC. In Proceedings of the 2014 IEEE 53rd Annual Conference on Decision and Control (CDC), Los Angeles, CA, USA, 15–17 December 2014. [Google Scholar]
- Maasoumy, M.; Sangiovanni-Vincentelli, A. Total and Peak Energy Consumption Minimization of Building HVAC Systems Using Model Predictive Control. IEEE Des. Test Comput. 2012, 29, 26–35. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Gyalistras, D.; Gwerder, M.; Jones, C.N.; Stauch, V.; Lehmann, B.; Morari, M. Increasing Energy Efficiency in Building Climate Control Using Weather Forecasts and Model Predictive Control. In Proceedings of the Clima—RHEVA World Congress, Antalya, Turkey, 9–12 May 2010; p. 8. [Google Scholar]
- Lehmann, B.; Gyalistras, D.; Gwerder, M.; Wirth, K.; Carl, S. Intermediate complexity model for Model Predictive Control of Integrated Room Automation. Energy Build. 2013, 58, 250–262. [Google Scholar] [CrossRef]
- Gondhalekar, R.; Oldewurtel, F.; Jones, C.N. Least-restrictive robust periodic model predictive control applied to room temperature regulation. Automatica 2013, 49, 2760–2766. [Google Scholar] [CrossRef]
- Favoino, F.; Fiorito, F.; Cannavale, A.; Ranzi, G.; Overend, M. Optimal control and performance of photovoltachromic switchable glazing for building integration in temperate climates. Appl. Energy 2016, 178, 943–961. [Google Scholar] [CrossRef]
- Ascione, F.; Bianco, N.; De Stasio, C.; Mauro, G.M.; Vanoli, G.P. Simulation-based model predictive control by the multi-objective optimization of building energy performance and thermal comfort. Energy Build. 2016, 111, 131–144. [Google Scholar] [CrossRef]
- Ascione, F.; Bianco, N.; De Stasio, C.; Mauro, G.M.; Vanoli, G.P. A new comprehensive approach for cost-optimal building design integrated with the multi-objective model predictive control of HVAC systems. Sustain. Cities Soc. 2017, 31, 136–150. [Google Scholar] [CrossRef]
- Zhao, J.; Lam, K.P.; Ydstie, B.E.; Loftness, V. Occupant-oriented mixed-mode EnergyPlus predictive control simulation. Energy Build. 2016, 117, 362–371. [Google Scholar] [CrossRef]
- Corbin, C.D.; Henze, G.P.; May-Ostendorp, P. A model predictive control optimization environment for real-time commercial building application. J. Build. Perform. Simul. 2013, 6, 159–174. [Google Scholar] [CrossRef]
- Zakula, T.; Armstrong, P.R.; Norford, L. Modeling environment for model predictive control of buildings. Energy Build. 2014, 85, 549–559. [Google Scholar] [CrossRef]
- Ma, Y. Model Predictive Control for Energy Efficient Buildings; University of California, Berkeley: Oakland, CA, USA, 2012. [Google Scholar]
- Sturzenegger, D.; Gyalistras, D.; Gwerder, M.; Sagerschnig, C.; Morari, M.; Smith, R.S. Model Predictive Control of a Swiss office building. In Proceedings of the CLIMA 2013 11th RHEVA World Congress, Prague, Czech Republic, 16–19 June 2013; p. 10. [Google Scholar]
- Hensen, J.; Lamberts, R. Building Performance Simulation for Design and Operation, 1st ed.; Routledge: London, UK, 2012. [Google Scholar]
- Bloem, J. System Identification Applied to Building Performance Data; Joint Research Centre European Commission: Geel, Belgium, 1994. [Google Scholar]
- Bacher, P.; Madsen, H. Identifying suitable models for the heat dynamics of buildings. Energy Build. 2011, 43, 1511–1522. [Google Scholar] [CrossRef] [Green Version]
- Sturzenegger, D.; Gyalistras, D.; Morari, M.; Smith, R.S. Semi-automated modular modeling of buildings for model predictive control. In Proceedings of the BuildSys ’12 Fourth ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings, Toronto, ON, Canada, 6 November 2012; pp. 99–106. [Google Scholar]
- Sturzenegger, D. Model Predictive Building Climate Control—Steps Towards Practice; ETH Zurich: Zurich, Switzerland, 2012. [Google Scholar]
- Andersen, K.K.; Madsen, H.; Hansen, L.H. Modelling the heat dynamics of a building using stochastic differential equations. Energy Build. 2000, 31, 13–24. [Google Scholar] [CrossRef] [Green Version]
- Kelman, A.; Borrelli, F. Bilinear Model Predictive Control of a HVAC System Using Sequential Quadratic Programming. IFAC Proc. Vol. 2011, 44, 9869–9874. [Google Scholar] [CrossRef]
- Sturzenegger, D. Bilinear Modeling of an Air Handling Unit for Model Predicitive Control Technical Report Models of the Components Nonlinear AHU Model; Eidgenössische Technische Hochschule (ETH), Institut für Automatik: Zürich, Switzerland, 2015. [Google Scholar]
- Henze, G.P.; Kalz, D.E.; Liu, S.; Felsmann, C. Experimental analysis of model-based predictive optimal control for active and passive building thermal storage inventory. HVAC&R Res. 2005, 11, 189–213. [Google Scholar]
- Borrelli, F. Fast stochastic predictive control for building temperature regulation. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012. [Google Scholar]
- Lauro, F.; Longobardi, L.; Panzieri, S. An adaptive distributed predictive control strategy for temperature regulation in a multizone office building. In Proceedings of the 2014 IEEE International Workshop on Intelligent Energy Systems (IWIES), San Diego, CA, USA, 8 October 2014; pp. 32–37. [Google Scholar]
- Siroky, J.; Cigler, J.; Ferkl, L. Hybrid MPC approach to reconfiguration of building heating system. In Proceedings of the 2013 Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013. [Google Scholar]
- De Cursi, E.S.; Sampaio, R. Uncertainty Quantification and Stochastic Modeling with Matlab, 1st ed.; ISTE Press—Elsevier: London, UK, 2015. [Google Scholar]
- Foucquier, A.; Robert, S.; Suard, F.; Stéphan, L.; Jay, A. State of the art in building modelling and energy performances prediction: A review. Renew. Sustain. Energy Rev. 2013, 23, 272–288. [Google Scholar] [CrossRef]
- Ren, M.J.; Wright, J.A. Adaptive Diurnal Prediction of Ambient Dry-Bulb Temperature and Solar Radiation. HVAC&R Res. 2002, 8, 383–401. [Google Scholar]
- Florita, A.; Henze, G. Comparison of Short-Term Weather Forecasting Models for Model Predictive Control. HVAC&R Res. 2009, 15, 835–853. [Google Scholar]
- Khakimova, A.; Kusatayeva, A.; Shamshimova, A.; Sharipova, D.; Bemporad, A.; Familiant, Y.; Shintemirov, A.; Ten, V.; Rubagotti, M. Optimal energy management of a small-size building via hybrid model predictive control. Energy Build. 2017, 140, 1–8. [Google Scholar] [CrossRef]
- Kim, S.H.; Augenbroe, G. Using the National Digital Forecast Database for model-based building controls. Autom. Constr. 2012, 27, 170–182. [Google Scholar] [CrossRef]
- Mayer, B.; Killian, M.; Kozek, M. Management of hybrid energy supply systems in buildings using mixed-integer model predictive control. Energy Convers. Manag. 2015, 98, 470–483. [Google Scholar] [CrossRef]
- Huang, H.; Chen, L.; Hu, E. A hybrid model predictive control scheme for energy and cost savings in commercial buildings: Simulation and experiment. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Vaghefi, S.A.; Jafari, M.A.; Zhu, J.; Brouwer, J.; Lu, Y. A Hybrid Physics-Based and Data Driven Approach to Optimal Control of Building Cooling/Heating Systems. IEEE Trans. Autom. Sci. Eng. 2014, 13, 600–610. [Google Scholar] [CrossRef]
- Moros, P.; Bourdais, R.; Dumur, D.; Buisson, J. Distributed model predictive control for building temperature regulation. In Proceedings of the 2010 American Control Conference (ACC), Baltimore, MD, USA, 30 June–2 July 2010. [Google Scholar]
- Moroşan, P.-D.; Bourdais, R.; Dumur, D.; Buisson, J. Building temperature regulation using a distributed model predictive control. Energy Build. 2010, 42, 1445–1452. [Google Scholar] [CrossRef]
- Ma, Y.; Anderson, G.; Borrelli, F. A Distributed Predictive Control Approach to Building Temperature Regulation. In Proceedings of the 2011 American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Scherer, H.F.; Pasamontes, M.; Guzmán, J.L.; Álvarez, J.D.; Camponogara, E.; Normey-Rico, J.E. Efficient building energy management using distributed model predictive control. J. Process Control 2014, 24, 740–749. [Google Scholar] [CrossRef]
- Long, Y.; Liu, S.; Xie, L.; Johansson, K.H. A scenario-based distributed stochastic MPC for building temperature regulation. In Proceedings of the 2014 IEEE International Conference on IEEE Automation Science and Engineering (CASE), Taipei, Taiwan, 18–22 August 2014. [Google Scholar]
- Barata, F.A.; Neves-silva, R. Distributed MPC for Thermal Comfort in Buildings with Dynamically Coupled Zones and Limited Energy. In Proceedings of the 5th Doctoral Conference on Computing, Electrical and Industrial Systems (DoCEIS), Costa de Caparica, Portugal, 7–9 April 2014; pp. 305–312. [Google Scholar]
- Béguery, P.; Industries, S.; Merlin, P.L. Model predictive control for energy management in buildings. Part 2: Distributed Model Predictive Control. In Proceedings of the 4th IFAC Conference on Nonlinear Model Predictive Control, Noordwijkerhout, The Netherlands, 23–27 August 2001; pp. 226–231. [Google Scholar]
- Lindelof, D.; Afshari, H.; Alisafaee, M.; Biswas, J.; Caban, M.; Mocellin, X.; Viaene, J. Field tests of an adaptive, model-predictive heating controller for residential buildings. Energy Build. 2015, 99, 292–302. [Google Scholar] [CrossRef]
- Halvgaard, R.; Bacher, P.; Perers, B.; Andersen, E.; Furbo, S.; Jørgensen, J.B.; Poulsen, N.K.; Madsen, H. Model predictive control for a smart solar tank based on weather and consumption forecasts. Energy Procedia 2012, 30, 270–278. [Google Scholar] [CrossRef]
- Halvgaard, R.; Poulsen, N.K.; Madsen, H.; Jørgensen, J.B. Economic Model Predictive Control for building climate control in a Smart Grid. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; pp. 1–6. [Google Scholar]
- Huang, G. Model predictive control of VAV zone thermal systems concerning bi-linearity and gain nonlinearity. Control Eng. Pract. 2011, 19, 700–710. [Google Scholar] [CrossRef]
- Siroky, J.; Oldewurtel, F.; Cigler, J.; Privara, S. Experimental analysis of model predictive control for an energy efficient building heating system. Appl. Energy 2011, 88, 3079–3087. [Google Scholar] [CrossRef]
- Sturzenegger, D.; Gyalistras, D.; Morari, M.; Smith, R.S. Model Predictive Climate Control of a Swiss Office Building: Implementation, Results, and Cost-Benefit Analysis. IEEE Trans. Control Syst. Technol. 2016, 24, 1–12. [Google Scholar] [CrossRef]
- Yudong, M.; Borrelli, F.; Hencey, B.; Packard, A.; Bortoff, S. Model Predictive Control of thermal energy storage in building cooling systems. In Proceedings of the CDC/CCC 48th IEEE Conference on Decision and Control, 2009 Held Jointly with the 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 392–397. [Google Scholar]
- Wallace, M.; McBride, R.; Aumi, S.; Mhaskar, P.; House, J.; Salsbury, T. Energy efficient model predictive building temperature control. Chem. Eng. Sci. 2012, 69, 45–58. [Google Scholar] [CrossRef]
- Goyal, S.; Barooah, P.; Middelkoop, T. Experimental study of occupancy-based control of HVAC zones. Appl. Energy 2015, 140, 75–84. [Google Scholar] [CrossRef]
- Huchuk, B.; Gunay, H.B.; O’Brien, W.; Cruickshank, C.A. Model-based predictive control of office window shades. Build. Res. Inf. 2016, 44, 445–455. [Google Scholar] [CrossRef]
- Hilliard, T.; Swan, L.; Kavgic, M.; Qin, Z.; Lingras, P. Development of a whole building model predictive control strategy for a LEED silver community college. Energy Build. 2016, 111, 224–232. [Google Scholar] [CrossRef]
- Fanger, P. Thermal Comfort: Analysis and Applications in Environmental Engineering; McGraw-Hill: New York, NY, USA, 1972. [Google Scholar]
- International Organization for Standardization (ISO). ISO 7730:2005—Ergonomics of the Thermal Environment—Analytical Determination and Interpretation of Thermal Comfort Using Calculation of the PMV and PPD Indices and Local Thermal Comfort Criteria; ISO/TC159/SC5; ISO: Geneva, Switzerland, 2005. [Google Scholar]
- American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE). Standard 55—Thermal Environmental Conditions for Human Occupancy; ASHRAE: Atlanta, GA, USA, 2016. [Google Scholar]
- Cigler, J.; Prívara, S.; Vána, Z.; Záceková, E.; Ferkl, L. Optimization of Predicted Mean Vote index within Model Predictive Control framework: Computationally tractable solution. Energy Build. 2012, 52, 39–49. [Google Scholar] [CrossRef]
- Jiri, C.; Samuel, P.; Zdenek, V.; Eva, Z.; Lukas, F. On Predicted Mean Vote Optimization in Building Climate Control. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1518–1523. [Google Scholar]
- Ferreira, P.M.; Ruano, A.E.; Silva, S.; Conceição, E.Z.E. Neural networks based predictive control for thermal comfort and energy savings in public buildings. Energy Build. 2012, 55, 238–251. [Google Scholar] [CrossRef]
- Álvarez, J.D.; Redondo, J.L.; Camponogara, E.; Normey-Rico, J.; Berenguel, M.; Ortigosa, P.M. Optimizing building comfort temperature regulation via model predictive control. Energy Build. 2013, 57, 361–372. [Google Scholar] [CrossRef]
- Castilla, M.; Álvarez, J.D.; Normey-Rico, J.E.; Rodríguez, F. Thermal comfort control using a non-linear MPC strategy: A real case of study in a bioclimatic building. J. Process Control 2014, 24, 703–713. [Google Scholar] [CrossRef]
- Garnier, A.; Eynard, J.; Caussanel, M.; Grieu, S. Predictive control of multizone heating, ventilation and air-conditioning systems in non-residential buildings. Appl. Soft Comput. J. 2015, 37, 847–862. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Q.; Srebric, J. Model predictive control for indoor thermal comfort and energy optimization using occupant feedback. Energy Build. 2015, 102, 357–369. [Google Scholar] [CrossRef]
- Klauco, M.; Kvasnica, M. Explicit MPC approach to PMV-based thermal comfort control. In Proceedings of the 2014 IEEE 53rd Annual Conference on Decision and Control (CDC), Los Angeles, CA, USA, 15–17 December 2014; pp. 4856–4861. [Google Scholar] [CrossRef]
- Daum, D.; Haldi, F.; Morel, N. A personalized measure of thermal comfort for building controls. Build. Environ. 2011, 46, 3–11. [Google Scholar] [CrossRef]
- De Ridder, F.; Diehl, M.; Mulder, G.; Desmedt, J.; Van Bael, J. An optimal control algorithm for borehole thermal energy storage systems. Energy Build. 2011, 43, 2918–2925. [Google Scholar] [CrossRef]
- Li, S.; Joe, J.; Hu, J.; Karava, P. System identification and model-predictive control of office buildings with integrated photovoltaic-thermal collectors, radiant floor heating and active thermal storage. Sol. Energy 2015, 113, 139–157. [Google Scholar] [CrossRef]
- Preglej, A.; Rehrl, J.; Schwingshackl, D.; Steiner, I.; Horn, M.; Skrjanc, I. Energy-efficient fuzzy model-based multivariable predictive control of a HVAC system. Energy Build. 2014, 82, 520–533. [Google Scholar] [CrossRef]
- May-Ostendorp, P.; Henze, G.P.; Corbin, C.D.; Rajagopalan, B.; Felsmann, C. Model-predictive control of mixed-mode buildings with rule extraction. Build. Environ. 2011, 46, 428–437. [Google Scholar] [CrossRef]
- Váňa, Z.; Cigler, J.; Široký, J.; Žáčeková, E.; Ferkl, L. Model-based energy efficient control applied to an office building. J. Process Control 2014, 24, 790–797. [Google Scholar] [CrossRef]
- Liang, W.; Quinte, R.; Jia, X.; Sun, J.Q. MPC control for improving energy efficiency of a building air handler for multi-zone VAVs. Build. Environ. 2015, 92, 256–268. [Google Scholar] [CrossRef]
- Jingran, M.; Qin, S.J.; Bo, L.; Salsbury, T.; Ma, J.; Li, B. Economic model predictive control for building energy systems. In Proceedings of the 2011 IEEE PES Innovative Smart Grid Technologies (ISGT), Anaheim, CA, USA, 17–19 January 2011; pp. 1–6. [Google Scholar]
- Salsbury, T.; Mhaskar, P.; Qin, S.J. Predictive control methods to improve energy efficiency and reduce demand in buildings. Comput. Chem. Eng. 2013, 51, 77–85. [Google Scholar] [CrossRef]
- Ma, J.; Qin, J.; Salsbury, T.; Xu, P. Demand reduction in building energy systems based on economic model predictive control. Chem. Eng. Sci. 2012, 67, 92–100. [Google Scholar] [CrossRef]
- Maasoumy, M.; Razmara, M.; Shahbakhti, M.; Vincentelli, A.S. Handling model uncertainty in model predictive control for energy efficient buildings. Energy Build. 2014, 77, 377–392. [Google Scholar] [CrossRef]
- Wei, T.; Zhu, Q.; Maasoumy, M. Co-scheduling of HVAC control, EV charging and battery usage for building energy efficiency. In Proceedings of the 2014 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Jose, CA, USA, 2–6 November 2015; pp. 191–196. [Google Scholar]
- Maasoumy, M.; Razmara, M.; Shahbakhti, M.; Sangiovanni Vincentelli, A. Selecting building predictive control based on model uncertainty. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; pp. 404–411. [Google Scholar]
- Kircher, K.J.; Zhang, K.M. Model Predictive Control of Thermal Storage for Demand Response. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 956–961. [Google Scholar]
- Cengel, Y.A.; Ghajar, A.J. Heat and Mass Transfer: Fundamentals and Applications, 5th ed.; McGraw-Hill: New York, NY, USA, 2014. [Google Scholar]
- Lu, Y.; Wang, S.; Sun, Y.; Yan, C. Optimal scheduling of buildings with energy generation and thermal energy storage under dynamic electricity pricing using mixed-integer nonlinear programming. Appl. Energy 2015, 147, 49–58. [Google Scholar] [CrossRef]
- Cimini, G.; Bemporad, A.; Bernardini, D. ODYS QP Solver, ODYS S.r.l. Available online: http://odys.it/qp (accessed on 10 March 2018).
- De Coninck, R.; Helsen, L. Practical implementation and evaluation of model predictive control for an office building in Brussels. Energy Build. 2016, 111, 290–298. [Google Scholar] [CrossRef]
- Huang, H.; Chen, L.; Hu, E. A new model predictive control scheme for energy and cost savings in commercial buildings: An airport terminal building case study. Build. Environ. 2015, 89, 203–216. [Google Scholar] [CrossRef]
- Hazyuk, I.; Ghiaus, C.; Penhouet, D. Model Predictive Control of thermal comfort as a benchmark for controller performance. Autom. Constr. 2014, 43, 98–109. [Google Scholar] [CrossRef]
- Bengea, S.C.; Kelman, A.D.; Borrelli, F.; Taylor, R.; Bengea, S.C.; Kelman, A.D.; Narayanan, S. Implementation of model predictive control for an HVAC system in a mid-size commercial building. HVAC&R Res. 2014, 20, 121–135. [Google Scholar]
- Privara, S.; Siroky, J.; Ferkl, L.; Cigler, J. Model predictive control of a building heating system: The first experience. Energy Build. 2011, 43, 564–572. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Ulbig, A.; Parisio, A.; Morari, M. Reducing Peak Electricity Demand in Building Climate Control using Real-Time Pricing and Model Predictive Control. In Proceedings of the 2010 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 1927–1932. [Google Scholar]
- Paris, B.; Eynard, J.; Grieu, S.; Talbert, T.; Polit, M. Heating control schemes for energy management in buildings. Energy Build. 2010, 42, 1908–1917. [Google Scholar] [CrossRef]
- Coffey, B.; Haghighat, F.; Morofsky, E.; Kutrowski, E. A software framework for model predictive control with GenOpt. Energy Build. 2010, 42, 1084–1092. [Google Scholar] [CrossRef]
- Ghiaus, C.; Hazyuk, I. Calculation of optimal thermal load of intermittently heated buildings. Energy Build. 2010, 42, 1248–1258. [Google Scholar] [CrossRef]
- Karlsson, H.; Hagentoft, C.-E. Application of model based predictive control for water-based floor heating in low energy residential buildings. Build. Environ. 2011, 46, 556–569. [Google Scholar] [CrossRef]
- Avci, M.; Erkoc, M.; Rahmani, A.; Asfour, S. Model predictive HVAC load control in buildings using real-time electricity pricing. Energy Build. 2013, 60, 199–209. [Google Scholar] [CrossRef]
- Berkenkamp, F.; Gwerder, M. Hybrid model predictive control of stratified thermal storages in buildings. Energy Build. 2014, 84, 233–240. [Google Scholar] [CrossRef]
- Hu, J.; Karava, P. A state-space modeling approach and multi-level optimization algorithm for predictive control of multi-zone buildings with mixed-mode cooling. Build. Environ. 2014, 80, 259–273. [Google Scholar] [CrossRef]
- Hu, J.; Karava, P. Model predictive control strategies for buildings with mixed-mode cooling. Build. Environ. 2014, 71, 233–244. [Google Scholar] [CrossRef]
- Chandan, V.; Alleyne, A.G. Decentralized predictive thermal control for buildings. J. Process Control 2014, 24, 820–835. [Google Scholar] [CrossRef]
- Touretzky, C.R.; Baldea, M. Nonlinear model reduction and model predictive control of residential buildings with energy recovery. J. Process Control 2014, 24, 723–739. [Google Scholar] [CrossRef]
- Herrera, E.; Bourdais, R.; Guéguen, H. Predictive and interactive controllers for solar absorption cooling systems in buildings. J. Process Control 2014, 24, 836–845. [Google Scholar] [CrossRef]
- Touretzky, C.R.; Baldea, M. Integrating scheduling and control for economic MPC of buildings with energy storage. J. Process Control 2014, 24, 1292–1300. [Google Scholar] [CrossRef]
- Dobbs, J.R.; Hencey, B.M. Model predictive HVAC control with online occupancy model. Energy Build. 2014, 82, 675–684. [Google Scholar] [CrossRef]
- Goyal, S.; Ingley, H.A.; Barooah, P. Occupancy-based zone-climate control for energy-efficient buildings: Complexity vs. performance. Appl. Energy 2013, 106, 209–221. [Google Scholar] [CrossRef]
- Herrera, E.; Bourdais, R.; Guéguen, H. A hybrid predictive control approach for the management of an energy production-consumption system applied to a TRNSYS solar absorption cooling system for thermal comfort in buildings. Energy Build. 2015, 104, 47–56. [Google Scholar] [CrossRef]
- Zakula, T.; Armstrong, P.R.; Norford, L. Advanced cooling technology with thermally activated building surfaces and model predictive control. Energy Build. 2015, 86, 640–650. [Google Scholar] [CrossRef]
- Boo, C.-J.; Kim, J.-H.; Kim, H.-C.; Lee, K.Y. Building Indoor Temperature Control Using Model Predictive Control in Cooling Systems. IFAC-PapersOnLine 2015, 48, 316–320. [Google Scholar] [CrossRef]
- Zhao, Y.; Lu, Y.; Yan, C.; Wang, S. MPC-based optimal scheduling of grid-connected low energy buildings with thermal energy storages. Energy Build. 2015, 86, 415–426. [Google Scholar] [CrossRef]
- Feng, J.; Chuang, F.; Borrelli, F.; Bauman, F. Model predictive control of radiant slab systems with evaporative cooling sources. Energy Build. 2015, 87, 199–210. [Google Scholar] [CrossRef]
- Marušić, A.; Lončar, D. Model predictive control in small family house: Extravagance or future of energy consumption in households. IFAC-PapersOnLine 2015, 28, 701–702. [Google Scholar] [CrossRef]
- Brooks, J.; Kumar, S.; Goyal, S.; Subramany, R.; Barooah, P. Energy-efficient control of under-actuated HVAC zones in commercial buildings. Energy Build. 2015, 93, 160–168. [Google Scholar] [CrossRef]
- Killian, M.; Mayer, B.; Kozek, M. Cooperative fuzzy model predictive control for heating and cooling of buildings. Energy Build. 2016, 112, 130–140. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Q.; Srebric, J. Occupant feedback based model predictive control for thermal comfort and energy optimization: A chamber experimental evaluation. Appl. Energy 2016, 164, 341–351. [Google Scholar] [CrossRef]
- Yao, J.; Costanzo, G.T.; Zhu, G.; Wen, B. Power Admission Control with Predictive Thermal Management in Smart Buildings. IEEE Trans. Ind. Electron. 2015, 62, 2642–2650. [Google Scholar] [CrossRef]
- Razmara, M.; Maasoumy, M.; Shahbakhti, M.; Robinett, R.D. Optimal exergy control of building HVAC system. Appl. Energy 2015, 156, 555–565. [Google Scholar] [CrossRef]
- Razmara, M.; Maasoumy, M.; Shahbakhti, M.; Rush, D.R. Exergy-Based Model Predictive Control for Building HVAC Systems. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 1677–1682. [Google Scholar]
- Zhao, J.; Lam, K.P.; Ydstie, B.E.; Karaguzel, O.T. EnergyPlus model-based predictive control within design–build–operate energy information modelling infrastructure. J. Build. Perform. Simul. 2015, 8, 121–134. [Google Scholar] [CrossRef]
- Baoti, M.; Novoselnik, B.; Cesi, J.; Petrovi, I. Nonlinear Model Predictive Control for Energy Efficient Housing with Modern Construction Materials. In Proceedings of the 2015 IEEE Sensors Applications Symposium (SAS), Zadar, Croatia, 13–15 April 2015; pp. 1–6. [Google Scholar]
- Majumdar, A.; Setter, J.L.; Dobbs, J.R.; Hencey, B.M.; Albonesi, D.H. Energy-comfort optimization using discomfort history and probabilistic occupancy prediction. In Proceedings of the 2014 International Green Computing Conference (IGCC), Dallas, TX, USA, 3–5 November 2015; pp. 1–10. [Google Scholar]
- Mayer, B.; Killian, M.; Kozek, M. Cooperative and hierarchical fuzzy MPC for building heating control. In Proceedings of the Fuzzy Systems (FUZZ-IEEE), 2014 IEEE International Conference on, Beijing, China, 6–11 July 2014; pp. 1054–1059. [Google Scholar]
- Mantovani, G.; Ferrarini, L. Temperature Control of a Commercial Building with Model Predictive Control Techniques. IEEE Trans. Ind. Electron. 2015, 62, 2651–2660. [Google Scholar] [CrossRef]
- Carrascal, E.; Garrido, I.; Garrido, A.J.; Sala, J.M. Model Predictive Control for the heating system of a public building. In Proceedings of the World Automation Congress (WAC), Waikoloa, HI, USA, 3–7 August 2014; pp. 433–438. [Google Scholar]
- Taneja, J.; Ieee, S.M.; Culler, D.; Ieee, F.; Tomlin, C.; Ieee, F. Reducing Transient and Steady State Electricity Consumption in HVAC Using Learning-Based Model-Predictive Control. Proc. IEEE 2012, 100, 240–253. [Google Scholar]
- Aswani, A.; Master, N.; Taneja, J.; Krioukov, A.; Culler, D.; Tomlin, C. Energy-Efficient Building HVAC Control Using Hybrid System LBMPC. IFAC Proc. Vol. 2012, 45, 496–501. [Google Scholar] [CrossRef]
- Li, X.; Malkawi, A. Multi-objective optimization for thermal mass model predictive control in small and medium size commercial buildings under summer weather conditions. Energy 2016, 112, 1194–1206. [Google Scholar] [CrossRef]
- Vega Lara, B.G.; Castellanos Molina, L.M.; Monteagudo Yanes, J.P.; Rodríguez Borroto, M.A. Offset-free model predictive control for an energy efficient tropical island hotel. Energy Build. 2016, 119, 283–292. [Google Scholar] [CrossRef]
- Acosta, A.; González, A.I.; Zamarreño, J.M.; Álvarez, V. Energy savings and guaranteed thermal comfort in hotel rooms through nonlinear model predictive controllers. Energy Build. 2016, 129, 59–68. [Google Scholar] [CrossRef]
- O’Dwyer, E.; De Tommasi, L.; Kouramas, K.; Cychowski, M.; Lightbody, G. Modelling and disturbance estimation for model predictive control in building heating systems. Energy Build. 2016, 130, 532–545. [Google Scholar] [CrossRef]
- Zong, Y.; Böning, G.M.; Santos, R.M.; You, S.; Hu, J.; Han, X. Challenges of implementing economic model predictive control strategy for buildings interacting with smart energy systems. Appl. Therm. Eng. 2017, 114, 1476–1486. [Google Scholar] [CrossRef]
- Dwyer, E.O.; De Tommasi, L.; Kouramas, K.; Cychowski, M.; Lightbody, G. Control Engineering Practice Prioritised objectives for model predictive control of building heating systems. Control Eng. Pract. 2017, 63, 57–68. [Google Scholar] [CrossRef]
- Cigler, J.; Tomáško, P.; Široký, J. BuildingLAB: A tool to analyze performance of model predictive controllers for buildings. Energy Build. 2013, 57, 34–41. [Google Scholar] [CrossRef]
- Huang, H.; Chen, L.; Mohammadzaheri, M.; Hu, E. A new zone temperature predictive modeling for energy saving in buildings. Procedia Eng. 2012, 49, 142–151. [Google Scholar] [CrossRef]
- Samad, T. A survey on industry impact and challenges thereof. IEEE Control Syst. 2017, 37, 17–18. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Formulation | Position | Restriction | Time Variation | Kind |
|---|---|---|---|---|
| Equality | System states | Hard | Constant | Rate |
| Inequality | Actuators | Soft | Time varying | Range |
| Model Type | Model of | Study | Building Classification | Forecast Method |
| Reduced order | Building | Simulated | Commercial | Offline |
| Detailed simulation | Building + HVAC | Experimental | Educational | Online |
| Calibrated grey-box | HVAC system | - | Residential | Database |
| Black-box | - | - | Other | Offline + online |
| Disturbances | Formulation | Goal | Optimization | |
| Weather | Linear | Economic | LQ | |
| Occupancy | Quadratic | Comfort | QP | |
| Prices | Infinite | Other | MILP | |
| Load | Combo | Combo | MIQP | |
| Combo | - | - | SLP | |
| - | - | - | SQP | |
| - | - | - | Other NL |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities. Energies 2018, 11, 631. https://doi.org/10.3390/en11030631
Serale G, Fiorentini M, Capozzoli A, Bernardini D, Bemporad A. Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities. Energies. 2018; 11(3):631. https://doi.org/10.3390/en11030631
Chicago/Turabian StyleSerale, Gianluca, Massimo Fiorentini, Alfonso Capozzoli, Daniele Bernardini, and Alberto Bemporad. 2018. "Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities" Energies 11, no. 3: 631. https://doi.org/10.3390/en11030631