Adaptive Fuzzy Control for Power-Frequency Characteristic Regulation in High-RES Power Systems



1
Centre for Renewable Energy Sources and Saving, Pikermi Attiki 19009, Greece
2
Flemish Institute for Technological Research, Mol 2400, Belgium
3
Ricerca sul Sistema Energetico-RSE S.p.A., Milano 20134, Italy
4
Institute for Energy and Environment, University of Strathclyde, Glasgow G1 1XQ, UK
*
Author to whom correspondence should be addressed.
Energies 2017, 10(7), 982; https://doi.org/10.3390/en10070982
Submission received: 17 May 2017
/
Revised: 6 July 2017
/
Accepted: 6 July 2017
/
Published: 12 July 2017
(This article belongs to the Special Issue Methods and Concepts for Designing and Validating Smart Grid Systems)
Abstract
:Future power systems control will require large-scale activation of reserves at distribution level. Despite their high potential, distributed energy resources (DER) used for frequency control pose challenges due to unpredictability, grid bottlenecks, etc. To deal with these issues, this study presents a novel strategy of power frequency characteristic dynamic adjustment based on the imbalance state. This way, the concerned operators become aware of the imbalance location but also a more accurate redistribution of responsibilities in terms of reserves activations is achieved. The proposed control is based on the concept of “cells” which are power systems with operating capabilities and responsibilities similar to control areas (CAs), but fostering the use of resources at all voltage levels, particularly distribution grids. Control autonomy of cells allows increased RES hosting. In this study, the power frequency characteristic of a cell is adjusted in real time by means of a fuzzy controller, which curtails part of the reserves, in order to avoid unnecessary deployment throughout a synchronous area, leading to a more localised activation and reducing losses, congestions and reserves exhaustion. Simulation tests in a four-cell reference power system prove that the controller significantly reduces the use of reserves without compromising the overall stability.
1. Introduction
Environmental as well as economic considerations constitute principal motivators towards adopting ever-increasing green technologies, namely renewable energy systems (RES) for the electrification of power systems. The higher the RES penetration, the more the system’s operation challenges will be expected due to unpredictability, intermittency and the vast dispersion, all intrinsic characteristics of this type of energy resources. The operation challenges are to be further intensified due to the high penetration targets that energy policies have set. For example, the target for green-house gasses (GHG) reduction at the European level is set to at least 40% by 2030, and between 80 and 95% by 2050 compared to the 1990 figures [1]. In addition, from the same report the minimum requirement of energy covered by RES by the year 2030 is 27%. More ambitious studies such as [2,3] show that even higher RES levels can be achieved. For example, e-Highway 2050 [2] predicts that one of the possible pathways for RES development involves a RES energy penetration as high as 100% by 2050. Furthermore, analyses like [3] predict possible high-RES penetration scenarios, namely up to 60% of energy covered by RES by 2030.
Regardless of the approach or the levels that will eventually be reached, RES penetration is expected to substantially increase in the next decades, in a fashion that will have some implications with regard to the best exploitation of the generated energy as well as the security of supply, the latter being a prerequisite for maximizing the former exploitation. To this end, an operation paradigm shift from today’s to future power systems is required in order to host the planned RES as effectively as possible. For instance, due to the high degree of dispersion that is expected in RES, not only should the energy exploitation be as local as possible but also operating responsibilities and challenges are issues better addressed locally. In this respect, awareness of the local grid status through increased observability combined with activation of the involved resources is of vital importance due to the high amounts of small-scale distributed energy resources (DER) units that can provide the required control services. In addition, scheduling and operation approaches based on a generation that largely follows load are to be revised due to the unpredictability of RES as well as the increased load flexibility which fosters a paradigm in which load mainly follows generation. Because of this paradigm shift, scheduling of resources may entail high peaks of power flows that occur rather locally, leading parts of the grid to operate close to their limits by contrast to current operating schemes in which load levelling is normally pursued.
However, despite the fact that large amounts of energy exchanges will happen locally, namely at Low Voltage (LV) and Medium Voltage (MV) distribution level, a substantial amount of energy will still be produced and transferred by means of High Voltage (HV) transmission grids, either due to centralised RES power plants, e.g., offshore wind farms or other bulk generation e.g., hydroelectric power plants. The above-described assumptions impose the need for new operating scheme approaches. All in all, research approaches regarding operation of high-RES penetration systems can be distinguished into three main pathways, namely the reconfiguration of roles and responsibilities in operating power systems, invention of new optimal automatic control strategies and reconsideration of operating requirements, especially in terms of frequency stability, namely less stringent frequency limits.
In this paper, one exemplary approach of power systems structured and operated as “cells” which constitute a web-of-cells (WoC) [4] is briefly presented in Section 2. Each cell incorporates the operation responsibilities and capabilities of modern systems’ Control areas (CAs) but with enhanced control capabilities at lower, i.e., distribution level, thus unlocking the great potential of distributed generators (DGs) as well as flexible loads and storage elements in the provision and utilisation of ancillary services. Cells are equipped with novel control strategies that optimally exploit flexibility of generation/consumption so much so that maximisation of RES in the grid can be achieved. To this end, the second and main part of this study is concerned with a novel strategy for adaptive frequency containment control (Adaptive FCC) which, as part of the cell control, aims to reduce the contribution of primary frequency reserves within the cell and all over a synchronous area, without jeopardising the overall stability. This way a number of benefits that are analysed in Section 3 are obtained. Section 4 is concerned with the simulation results of the implementation of such a control strategy in a power system consisting of four cells.
2. The “Cell” and “Web-of-Cells” Concepts
For the purpose of control, the main objective of a cell is to ensure stability in the whole synchronous area in a distributed but, at the same time, coordinated fashion. The concept of cell presents a generic applicability and, hence, it may as well be used in transmission and distribution networks, also with a diverse geographical scalability. In fact, the basic idea behind this concept is to engage distribution system operators (DSOs) as active participants of the balance/frequency control process, control actions which are hitherto the sole responsibility of transmission system operators (TSOs) nominated as CA operators in present-day power systems. The use of this conventional approach in power systems with a high amount of DER has some intrinsic disadvantages because, in order for a TSO to effectively use largely distributed reserves, the operator must be aware of characteristics and operating conditions of distribution grids and have control access to all involved resources. On the other hand, in this paradigm DSOs are concerned with issues like voltage control which is highly influenced by the use of balance reserves. In this process, a number of conflicts can emerge due to different technical, regulatory and economic objectives of the involved actors.
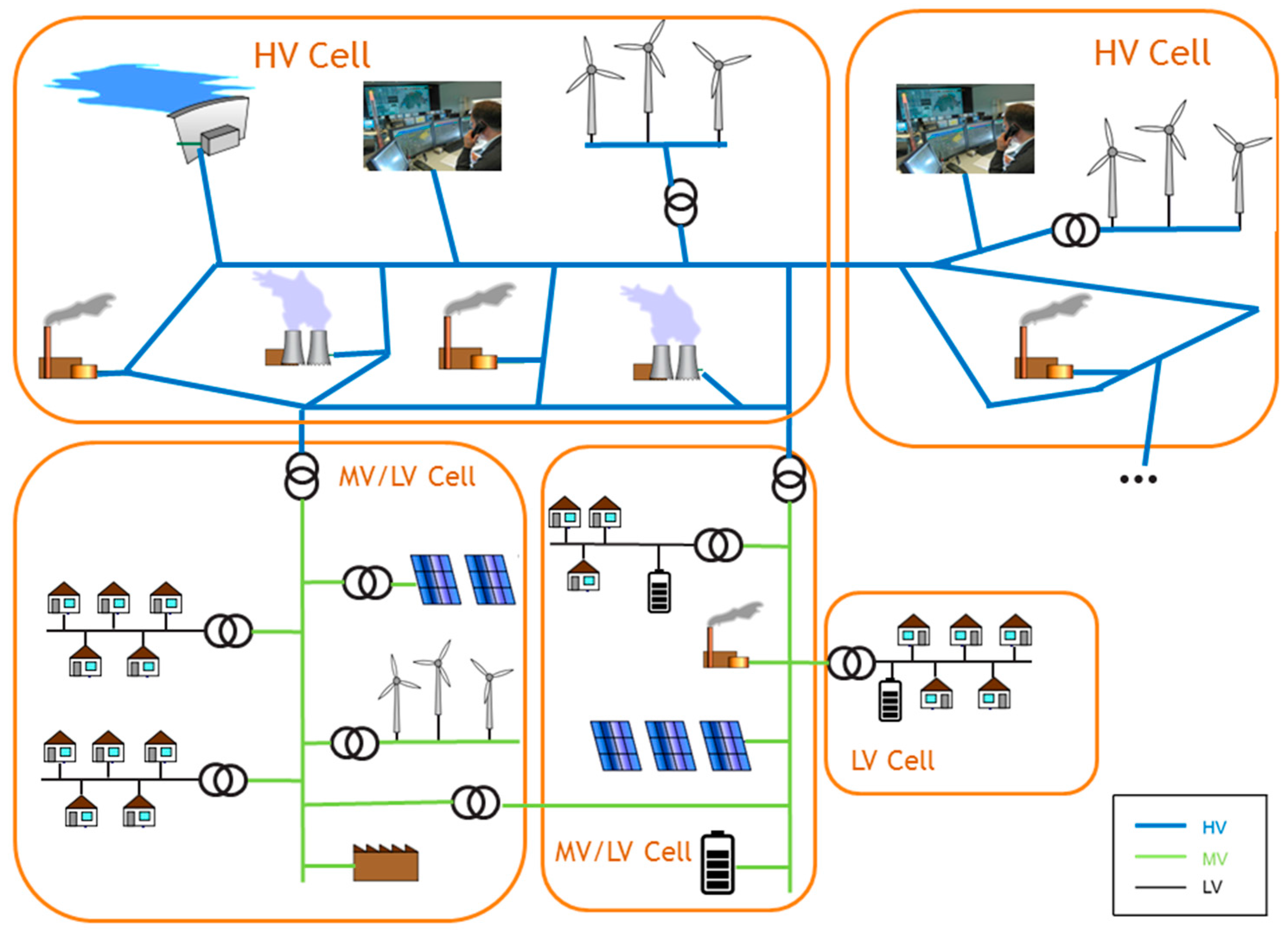
As an alternative paradigm, the concept of cells resolves such issues in the sense that an operator like a DSO becomes also an operator of balance/frequency control, thereby reducing the complexity and conflicts caused by the conventional approach. The cell concept, however, does not incapacitate TSOs in their key role as balance/frequency operators as well. It is rather an extrapolation of the balance/frequency control concept to lower levels of the power system, relieving TSOs from the burden of managing a large amount of reserves. Many connected cells are combined to shape a WoC as illustrated in Figure 1. In this approach, one cell cannot encapsulate other cells, thus making cells independent in terms of energy balancing and control objectives since, apart from the overall synchronous area balance, each cell pursues its own goals.
In terms of control architecture, there is a novel control approach defined for use within cells. In particular, a cell is equipped with a hierarchical control scheme, in which functions regarding planning, scheduling and optimising reserves for balance, frequency and voltage control are located at cell operation control centres together with activation functions. While the cell operates mainly, but not exclusively, at secondary and tertiary timescales, primary time scales, such as provision of virtual inertia, frequency containment and control of nodes voltage are mostly dealt with at single-unit or aggregated (power plant) levels. The main operation functionalities of a cell in this respect are virtual inertia provision, containment of frequency deviations, restoration of balance and frequency, and steering of balance schedules at optimal values. In terms of voltage control, a cell is concerned with the fast-responding primary control locally at nodes and the coordinated optimal voltage control at system level that aims at improving the voltage stability of the cell as a whole by selecting the optimal voltage combinations across the grid, taking into account its specific characteristics [4].
Compared with other architectural approaches, such as microgrids [5,6,7,8], which is perhaps the most widely accepted, mature and well-established concept for hosting large amounts of distributed RES, in terms of DER integration, the cell concept presents some advantages such as more generic voltage level applicability (whilst microgrids are confined mainly to LV distribution grids), more than one connection (tie-line) to other cells at any voltage level, or no self-sufficiency in terms of energy balance which means that a cell can largely rely on imports/exports, etc. On top of that, cells ensure their provision of reserves that serve primarily their own stability whilst microgrids, when in grid-connected mode, act rather as aggregators providing ancillary services to DSOs. However, by no means should cells be considered as a substitute of microgrids, since both architectures can coexist in a power system.
3. Proposed Adaptive Frequency Containment Control
3.1. Analysis of the Control Requirements
Within the present-day system operation, primary frequency control is responsible for containment of frequency after imbalances that lead to acceleration/deceleration of synchronous generators (SGs). The response of a system to a frequency event is partly determined by the network power frequency characteristic (NPFC), a measure of the total power deviation in a synchronous area for a specific amount of steady-state frequency change [9]. The classic containment of frequency is a strategy based on the droop slope of the governors of SGs as well as the self-regulation of load during frequency changes. This way, it is easy to specify the response of a synchronous area by setting the appropriate droop in the governors or selecting the appropriate number/capacity of generators to provide such a service. Good though this control strategy may be for present-day power systems, it is not so advantageous in future power systems hosting high amounts of distributed RES. The reasons are the following:
- The conventional approach of the NPFC specification presumes that all CAs, even remotely located, contribute proportionally to the incident. Even though this approach is effective for power systems with centralised power production at transmission level, in power systems with high degree of dispersion, where reserves can be located in LV grids far away from the area of imbalance, the LV distribution grids may experience sizeable changes in power flows. This can potentially lead to congestion, over/under voltages and increased power losses in the grid.
- If DER units such as photo voltaics (PVs) and wind generators (WGs) participate in the provision of FCC, they may be required to curtail their production based on remotely located incidents. Thus, this curtailment would lead to reduction of useful RES generation from areas not responsible for the imbalance incident.
- Operating frequency limits will most probably be reconsidered and relaxed so that operation would require less demanding frequency control and reduction in the corresponding containment reserves.
- Apart from their principal operating goal, DER can be used in multiple-purpose ancillary services provision, particularly the provision of virtual inertia as a primary requirement of future frequency control [10,11]. The fixed droop provision by these DER units in conjunction with the extra control strategies they provide may, under specific circumstances, lead to output saturation and incapacitation of the reserves.
To this end and on the grounds of the “web-of-cells” concept, we propose an adaptive control strategy for FCC capable of detecting the cells’ imbalance state, which is the result of any deviation from the scheduled generation and consumption within the cell. This detection is done in real time at cell level and, by doing so, the controller is capable of modifying (curtailing) the droop contribution of the cell so as to reduce its frequency containment reserves (FCR) activation. It should be pointed out that the proposed adaptive control is strongly connected to the WoC concept since it concerns the cell power-frequency characteristic (CPFC) value of a cell and the implementation is done at a cell-level. By contrast, the frequency response control (i.e., droop characteristic of a DER) is a purely decentralised approach and, hence, not specifically connected to the WoC only, but it can be applied to any other architectural approach as well. The scope of the proposed adaptation is to reduce the FCR when the imbalance takes place not inside the cell but somewhere else in the power system, whilst for the case where imbalance happens inside the cell, the slope of power frequency characteristic of it should essentially remain unchanged. Also, in an alternative approach, the slope of the characteristic of a cell could be increased during the incident in order to obtain a narrower frequency deviation and a more constant NPFC across the synchronous area; however, this approach is out of the scope of the present study. The basic benefits of this approach are:
- Mainly, local activation of primary reserves.
- Reduction in power losses, congestion, over/under voltage issues caused in other cells.
- Less conflicts in usage of resources, especially RES and DER used by other ancillary services controllers.
- Potential scheduling at cell level which leads to reduced computational burden and increased accuracy. This is due to the fact that the power frequency characteristic is determined at cell level based on the cell’s rating. The calculation of the NPFC at Synchronous Area level is then based on the energy yield of the cells and their contribution to the NPFC instead of considering all units individually.
It is worth noting that adaptive droop control is a method already considered in several studies such as [12,13,14,15,16,17,18], which, however, focus on local operation levels such as the operation of single devices, e.g., inverters or implementation at microgrid level at most. Besides that, various research studies such as [19,20] address the issue of the optimal restoration rather than the frequency containment itself in an optimal way. For the above-mentioned reasons, present study is important not only because of its novelty but also for the simplicity of its implementation.
3.2. Fuzzy Logic Controller Selection and Design
The proposed control strategy is briefly described in Figure 2, in which the equivalent of a power system area is assumed as a transfer function. This model was selected not as the most representative example of a cell, although a cell can also be a HV transmission area with the characteristics of Figure 2’s model. The reason for selecting this model is due to its simplicity. Based on this power model, it is more convenient to explain the input and output configuration of the proposed controller. In this diagram, cell i’s frequency response to imbalances is represented by the transfer function Gpi(s), and it involves the parameters of inertia constant Hi as well as load self-regulation Di in the following relationships:
The transfer function GGT(s) is used to represent the time delays of the SG’s governor-turbine system assumed for this cell. The specific system is interconnected with other cells (j, k, etc.). The interconnection is reflected on the tie-line error calculation, which depends on the instantaneous frequency deviations of the adjacent cells. Table 1 provides an overview of this model’s main parameters and input signals. The adaptive control in our case is obtained by means of a fuzzy logic controller that receives frequency (Δfi) and tie-line power deviation (ΔPtie,i), generally given by:
as inputs and derives a curtailment ratio for the full-scale droop control of the cell. Fuzzy controllers provide numerous capabilities in terms of control logic based on multiple input signals and they are used in various power systems control studies [21]. In our case, the controller uses the combination of both Δfi and ΔPtie,i in order to identify the cell’s state.
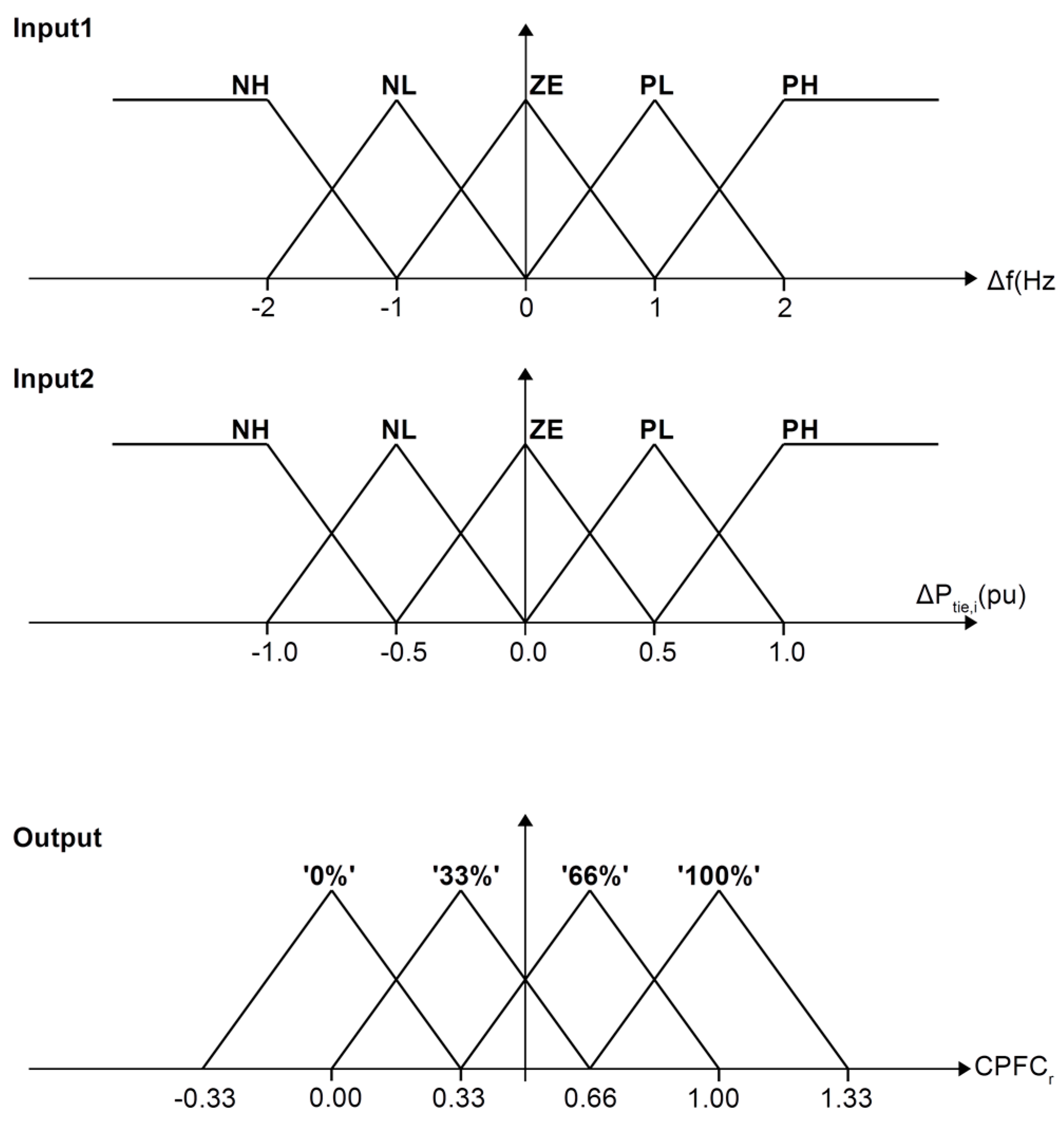
The sum in Equation (2) represents the individual contribution of each adjacent cell j to the tie-line error in cell i. The premise of this approach is that when an imbalance incident happens in one cell, the frequency initially increases/decreases based on the imbalance sign and, by the same token, and based on the sign convention for the power production/consumption, the tie-line error aggregate follows an opposite-to-the-frequency course, i.e., the tie-line error increases when frequency decreases. Thus, by detecting the combination of signs as well as sizes of the two errors, it is possible to adjust the droop slope of the cell when the incident takes place outside the cell or maintain its maximum value when the incident concerns the specific cell. The membership functions of the selected controller are depicted in Figure 3. In this exemplary approach, the input and output signals consist of triangular functions. The maximum frequency range is from 48 to 52 Hz (±2 Hz) and the maximum tie-line error varies from −1 to +1 pu. However, these limits are easily adjustable by means of the gains g1 and g2 in the input signals. In any case, the output CPFCr consists of four membership functions which produce a gradual CPFC reduction from 100% to 0%.
The rules used for the proposed adaptive control are summarised in the rule table below (Table 2). The symbolic names shown in Figure 3 and Table 2 stand for “Negative High” (NH), “Negative Low” (NL), “Zero” (ZE), “Positive Low” (PL), and “Positive High” (PH). As can be seen in this table, the occurrence of error signals with opposite signs implies incidents inside the cell, thus the CPFC coefficient remains unchanged. By contrast, there is a reduction in the CPFC value whenever the signs of the errors are the same, with a specific reduction selection based on the size of the error. For example, in Table 2 a combination of input signals such as Δfi = −1 Hz and ΔPtie,i = −0.5 pu (g1 = g2 = 1) yields a CPFCr = 66%.
It is worth noting that the calculation of the crisp output value is obtained by means of the centre-of-gravity (CoG) method, which takes into account the chopped membership functions of the input signals:
where, bi is the CoG point of the output membership function μ(i). In our case the CoG points corresponding to Figure 3 are b1 = 0.00, b2 = 0.33, b3 = 0.66 and b4 = 1.00 respectively.
4. Simulation Results
For the validation of the proposed adaptive control, the power system shown in Figure 4 was selected and implemented in Matlab/Simulink/SimScape Power. This system is based on the CIGRE Medium Voltage (MV) reference grid presented in [22]. For our analysis, we assumed that the specific power system consists of four cells interconnected in the configuration shown in Figure 4. The number of cells was selected to obtain a sufficient meshed topology in the system with a sufficient number of cells (above two) which leads to a better assessment of the controller. During the tests, two adaptive controllers were used, one in cell 1 and one in cell 2. Cell 3 was not assumed to have DGs and, therefore, FCC whatsoever. However, imbalances happening in cell 3 were implemented to investigate the effect on the controllers of cells 1 and 2. Last, but not least, none of the three MV cells were equipped with control to restore frequency, which for these tests was assumed to be the task of the HV cell only. It should be pointed out here that, in connection with the parameters of Figure 2, the main system parameters for cells 1–3, such as inertia constant H, load damping factor D, time delays TG and TT, as well as integrators’ gains KI were all set zero. This assumption does not affect the test results since the presence of these parameters is not a prerequisite for the proposed controller to operate. Also, the nature of the resources in the three cells, all of which are assumed as inverter-based units, makes the absence of inertia and time delays a reasonable assumption. The latter entails that in terms of dynamics, the frequency of all three MV cells is the same and it depends on the parameters of the HV cell. The parameters that were fixed throughout the tests for this cell are shown in Table 3. Other important parameters such as the droop slope of each area were changed based on each scenario. It is noteworthy that the selection of these parameters was not based on a systematic approach but it was done based indicative literature values.
4.1. Scenario A: Short-Term Analysis
This scenario includes the investigation of the adaptive controller’s qualitative behaviour for short-term imbalance incidents without the presence of frequency restoration control. The latter was omitted for the sake of clarity of results in order to have a clear view of the fuzzy controller’s response to input signals. As a consequence, due to the absence of any frequency restoration, all test results in this scenario present a steady-state frequency and imbalance deviation. In order to assess the ability of the controller to discern the location of the imbalance, three different imbalances were implemented in each of the three MV cells. Each imbalance was a load change of 3 MW located at nodes 2, 9 and 12, respectively.
Also, each imbalance takes place at t = 100 s and the controller gains g1 and g2 were set to 5 and −50 respectively. The results in Figure 5 show the response of the frequency and tie-line errors in conjunction with the CPFC curtailment for two of the three investigated imbalances. In this case, it is self-evident that the two controllers successfully pinpoint the imbalance location resulting in CPFC reduction only in cell 2 when the imbalance takes place in cell 1, or in both, cells 1 and 2, when the imbalance takes places in cell 3. Furthermore, for the case that the imbalance happens in cell 2 the results are similar to the ones shown in Figure 5a. That means that the CPFC ratio of cell 2 remains unchanged, whereas the CPFC value of cell 1 is curtailed. It is also noteworthy that the variation of CPFC in all these tests does not go below 50%. This is due to the limited imbalance deviation for the specific incident compared to the base power of 50 MVA. With the selection of a gain value equal to −50 for the imbalance error, the latter is amplified enough to see a significant reduction of CPFC to about 50%. By further increasing the gain, or by changing the membership functions and/or the rule table, it is possible to increase the output range of the CPFC curtailment to even lower values. Since it is not easy to predict the exact values of the input errors in a power system model like the one used, the controller has been tested and validated in its full input/output range in a stand-alone set of tests with fully controllable inputs.
4.2. Scenario B: Long-Term Analysis
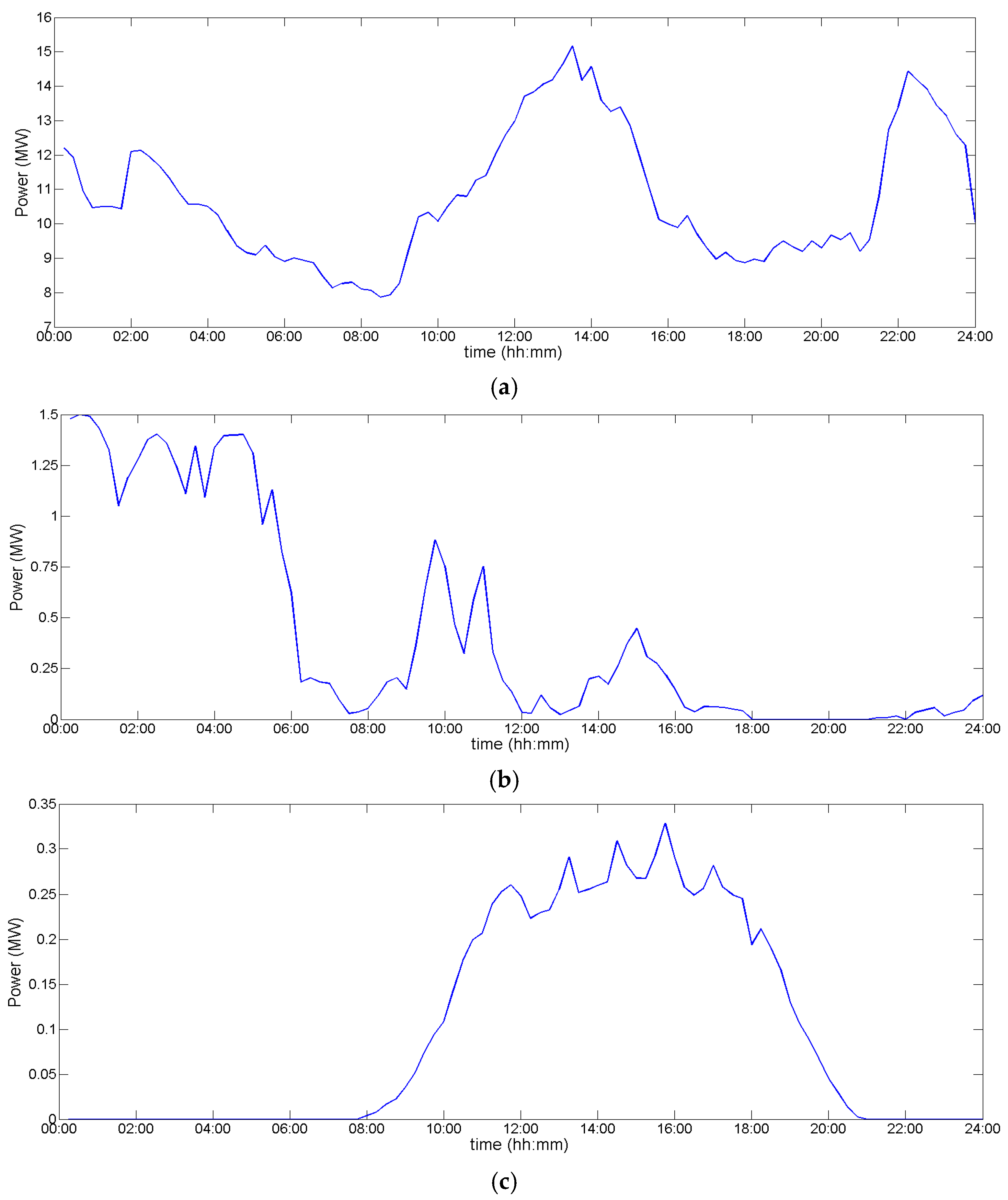
This scenario is used to investigate the behaviour of the control scheme in a 24 h operation of the above-described network. To this end, the power profiles shown in Figure 6 were used. These profiles have a sampling rate of 15 min. The input data shown in this diagram were scaled down and used as input signals to variable loads/generators in the model. In order to do this, the original data were divided by the maximum power of each profile in order to calculate the values in pu.
Once the pu values of load were obtained, the minimum load value was used as base-load in the system (fixed load at each bus) and the variable load was introduced as dynamic loads at each bus. In order to have differentiation among the buses, the dynamic load profile of each bus was modified using a random number generator. Finally, to get the actual power at the buses, each pu load profile was scaled-up by a factor based on the nominal load of each bus given by the CIGRE model. The same scaling-down and -up strategy was also used for the PVs and WG profiles, ignoring, however, the differentiation among PVs (all PVs produced the same profile of power). Furthermore, of the four cells making up the specific test grid, only two were equipped with the adaptive control. In order to highlight the impact of these controllers on the overall stability as well as to better assess the impact on the energy usage, the HV cell in this model was assumed to incorporate a relatively small droop slope corresponding to 1 MW/Hz. The contribution of the DER units in the droop slope was selected so that it would reflect their capability of varying their output power within specific margins. Thus, RES such as PVs and WG were assumed to be able only to reduce their output power (curtailment of generation) in case of production surplus. Also, other DER units such as batteries were considered to have capability of both increasing/decreasing their power, responding to any frequency variation. Due to this asymmetric contribution of DER, the scheduled droop slope of each unit should be selected such that a symmetric overall CPFC can be achieved. In our case, however, in order to investigate the impact that an asymmetric CPFC could have on the overall stability, the aggregated maximum droop slope or CPFC of each cell was selected −233 kW/Hz (negative delta f) and −300 kW/Hz (positive delta f) for cell 1 and −314 kW/Hz (negative delta f) and −610 kW/Hz (positive delta f) for cell 2.
Apart from the significant asymmetry in the aggregated CPFC, the part of the characteristic concerned with the positive frequency deviations provided by cells 1 and 2 is approximately equal to the HV droop slope which is fixed. Also, since this part of the CPFC is delivered by RES and since one of the main objectives of the test is to show the curtailment reduction caused on such kind of useful energy, the disturbance scenarios included stepwise reductions in the scheduled load profile of Figure 6. Specifically, each timeframe (15 min) one-step change in the power consumption of each bus is implemented. Each change is selected to −10% of the actual power at the moment of reduction. This way, the resulting frequency disturbances lead to increase of frequency and activation of the controller part mainly related to the PVs and WG of the power system. For the quantification of the resulting reserves reduction, two types of mathematical formulation were used. The first one corresponds to the absolute energy usage expressed by the formula:
The second formulation is an expression of the cost of the usage of these reserves expressed as:
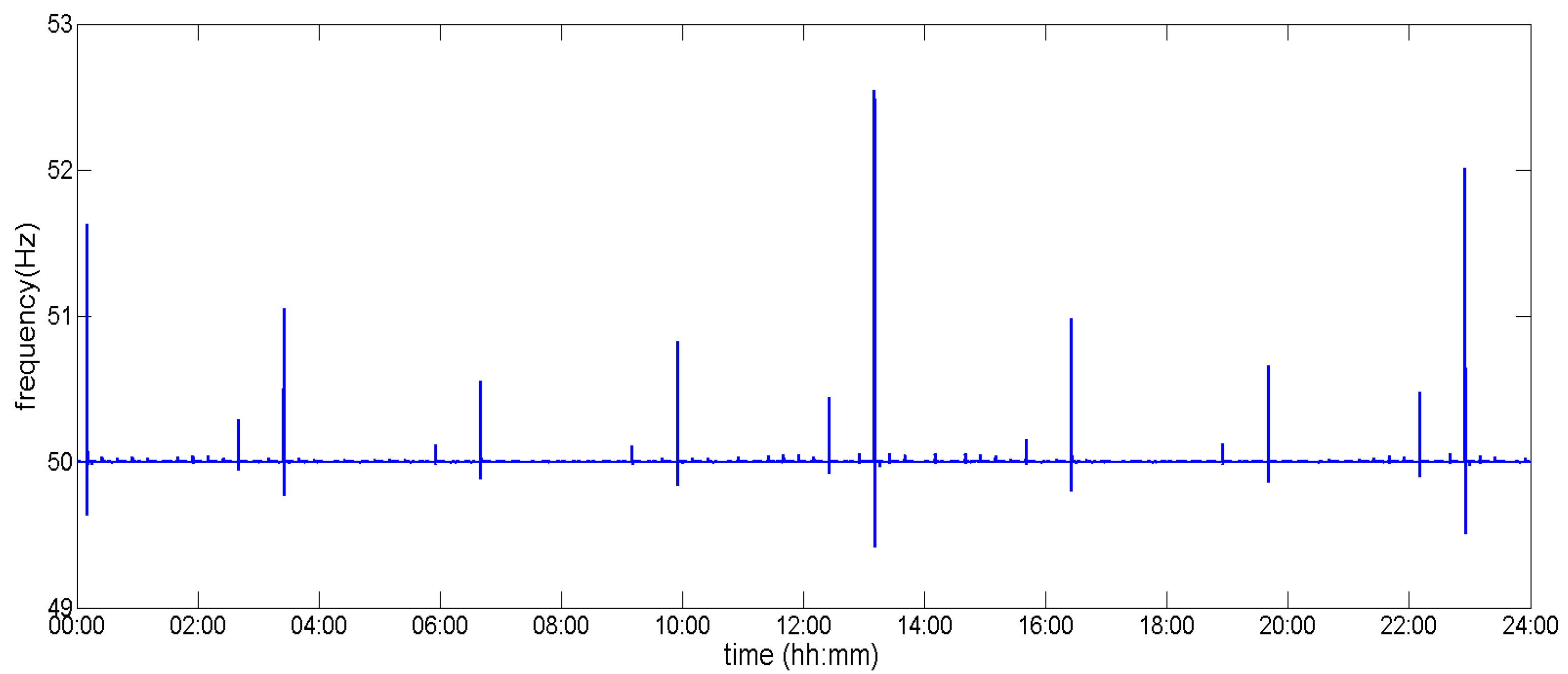
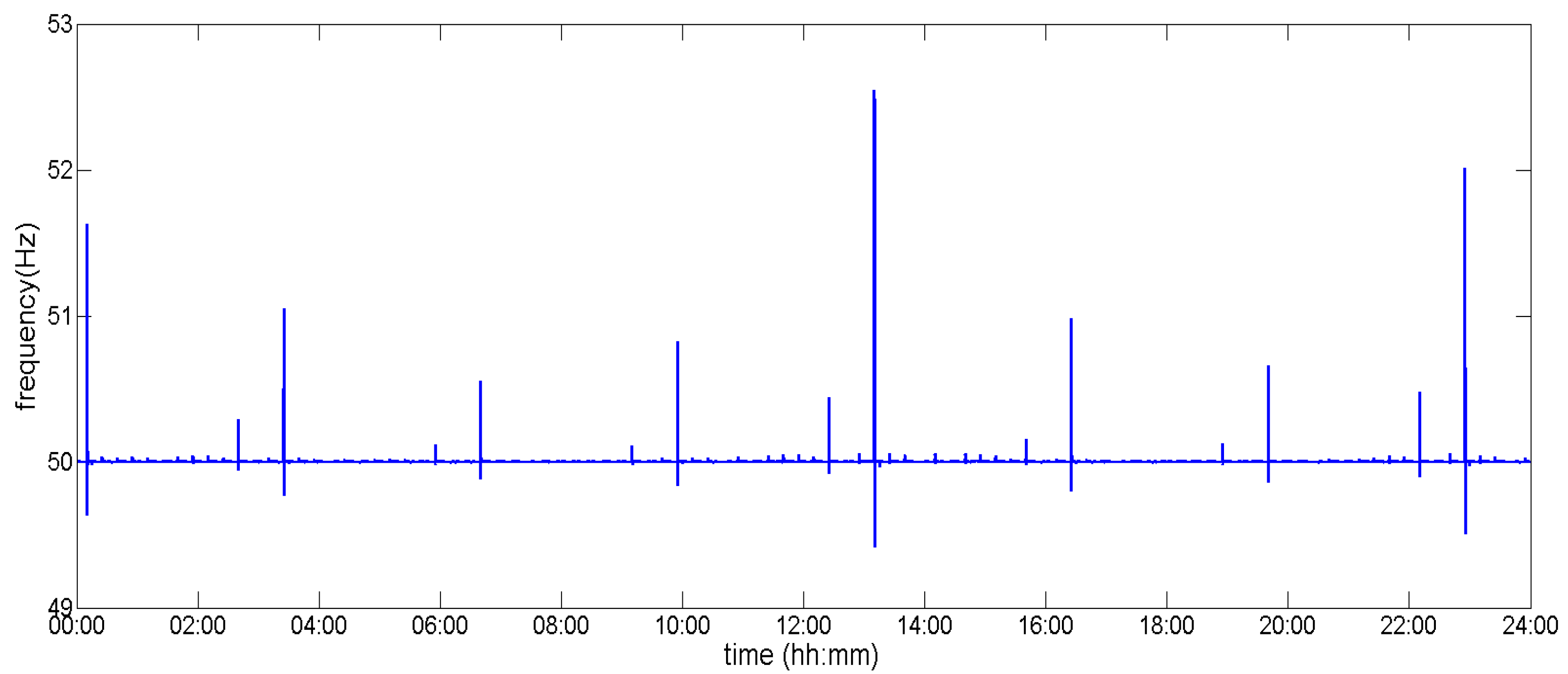
Last, but not least, the other HV area parameters used in this scenario were Kp = 100 Hz/pu and H = 5 s. Based on the afore-mentioned assumptions, the 24 h simulation test with and without the use of adaptive FCC control shows that a significant reduction in the use of FCC reserves can be achieved in total, but also for the individual types or RES reserves as well. The results obtained for this scenario are summarized in Table 4 and Table 5, respectively. Table 4 illustrates the energy/cost saving for all DER when the proposed control is used (left column) in contrast with the classic fixed droop (right column). The results in this table show a significant overall reduction in both the energy (19.7%) and the cost (26.7%) by means of the adaptive modification of CPFC in the system. Similarly, a more specific table (Table 5) shows the impact on the adaptive control on the RES of the system. It is evident that with the use of the proposed controller a significant reduction in RES energy loss is achieved. It is worth noting that the significant reduction in the use of reserves does not compromise the overall stability since the maximum frequency deviation for a fixed-droop FCC is 52.50 Hz, whereas the implementation of the adaptive control increases only slightly the deviation to 52.54 Hz. Likewise, the minimum frequency deviations with and without the use of adaptive control are 49.42 Hz and 49.51 Hz, respectively. The relatively high frequency deviation in both versions of the controller is due to the low overall droop slope of the system. Last, but not least, the system remains stable despite the asymmetric droop due to the type of reserves. Figure 7 shows the frequency response of the two cells over time for the case of adaptive FCC control. It is worth noting that by implementing a slightly modified controller version with an increase of the CPFC ratio above 1 when the incident takes places inside the corresponding cell, it would be possible to maintain the frequency deviation equal to the fixed-droop version of the controller. In such a case, the local character of the reserves activation remains the same, with all the related benefits of this approach.
The drawback of such a variation, however, is the requirement of a higher amount of reserved power. Thus, in our study we only investigated the curtailment of CPFC with the concession that a slight increase of frequency deviation is acceptable. An operator, however, could select the alternative method if the availability of extra reserves is not an issue.
5. Conclusions
This study deals with the use of an adaptive control method for FCC in future power systems. The basic idea behind the control method is that the system consists of interconnected cells, entities capable of dealing with imbalance issues even at distribution level, and makes use of the frequency and tie-line error signals in order to obtain a secure imbalance estimation in real time. Based on the imbalance location and size, the controller curtails the droop contribution of the cell so that reduced use of FCR is induced. This results in a number of benefits linked to efficient, improved local operation of reserves. This avoids congestions, over-voltages and conflicts of use with other control schemes and increases the utilisation of the RES energy from areas located far away from the imbalance incident. The method was developed based on a fuzzy controller and it was implemented and tested using a 4-cell interconnected system. The results showed that not only is the proposed controller capable of reducing the overall usage of FCR, but it can also maintain a quite satisfactory level of stability without deteriorating the overall system behaviour since it only slightly influences the peak deviations of frequency and tie-line power.
Acknowledgments
The research leading to these results has received funding from the European Union Seventh Framework Programme (FP7/2007–2013) under grant agreement No. 609687. Any opinions, findings and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect those of the European Commission.
Author Contributions
Chris Caerts conceived the idea of adaptive FCC control. Evangelos Rikos designed and implemented the fuzzy controller. Chris Caerts, Evangelos Rikos and Graeme Burt conceived the WoC concept. Evangelos Rikos and Mattia Cabiati conceived and designed the simulation tests. Evangelos Rikos, Mattia Cabiati and Mazheruddin Syed analysed the test results. Evangelos Rikos, Chris Caerts, Mazheruddin Syed and Mattia Cabiati wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- European Commission. Strategic Energy Technology (SET) Plan-Towards an Integrated Roadmap: Research and Innovation Challenges and Needs of the EU Energy System; European Commission: Rome, Italy, 2014; pp. 1–2. [Google Scholar]
- e-Highway 2050. Available online: www.e-highway2050.eu/e-highway2050/ (accessed on 20 October 2016).
- ENTSO-E. 10 Year Network Development Plan 2014; ENTSO-E: Brussels, Belgium, 2014; pp. 6–16. Available online: https://www.entsoe.eu/major-projects/ten-year-network-development-plan/tyndp 2014/Documents/TYNDP%202014_FINAL.pdf (accessed on 8 May 2017).
- D’hulst, R.; Fernández, J.M.; Rikos, E.; Kolodziej, D.; Heussen, K.; Geibel, D.; Temiz, A.; Caerts, C. Voltage and Frequency Control for Future Power Systems: The ELECTRA IRP Proposal. In Proceedings of the International Symposium on Smart Electric Distribution Systems and Technologies (EDST 2015), Vienna, Austria, 8–11 September 2015; pp. 1–6. [Google Scholar]
- Martin-Martínez, F.; Sánchez-Miralles, A.; Rivier, M. A literature review of Microgrids: A functional layer based classification. Renew. Sustain. Energy Rev. 2016, 62, 1133–1153. [Google Scholar] [CrossRef]
- Su, W.; Wang, J. Energy Management Systems in Microgrid Operations. Electr. J. 2012, 25, 45–60. [Google Scholar] [CrossRef]
- Hatziargyriou, N. Microgrids: Architectures and Control; Wiley/IEEE Press: London, UK, 2014. [Google Scholar]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the Art in Research on Microgrids: A Review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- ENTSO-E. Continental Europe Operation Handbook- Appendix 1, Load Frequency Control and Performance; ENTSO-E: Brussels, Belgium, 2004; pp. 1–9. Available online: https://www.entsoe.eu/publications/system-operations-reports/operation-handbook/Pages/default.aspx (accessed on 8 May 2017).
- Vogler-Finck, P.J.C.; Früh, W.-G. Evolution of primary frequency control requirements in Great Britain with increasing wind generation. Electr. Power Energy Syst. 2015, 73, 377–388. [Google Scholar] [CrossRef]
- Teng, F.; Mub, Y.; Jia, H.; Wuc, J.; Zeng, P.; Strbac, G. Challenges on primary frequency control and potential solution from EVs in the future GB electricity system. Appl. Energy 2017, 194, 353–362. [Google Scholar] [CrossRef]
- Oureilidis, K.; Demoulias, Ch. A decentralized impedance-based adaptive droop method for power loss reduction in a converter-dominated islanded microgrid. Sustain. Energy Grids Netw. 2016, 5, 39–49. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Chaudhuri, B. Adaptive Droop Control for Effective Power Sharing in Multi-Terminal DC (MTDC) Grids. IEEE Trans. Power Syst. 2013, 28, 21–29. [Google Scholar] [CrossRef]
- Marzbanda, M.; Moghaddamb, M.M.; Akoredec, M.F.; Khomeyranib, G. Adaptive load shedding scheme for frequency stability enhancement in microgrids. Electr. Power Syst. Res. 2016, 140, 78–86. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Lin, J. Decentralized Vehicle-to-Grid Control for Primary Frequency Regulation Considering Charging Demands. IEEE Trans. Power Syst. 2013, 28, 3480–3489. [Google Scholar] [CrossRef]
- Amin Ghasemi, M.; Parniani, M. Prevention of distribution network overvoltage by adaptive droop-based active and reactive power control of PV systems. Electr. Power Syst. Res. 2016, 133, 313–327. [Google Scholar] [CrossRef]
- Hoseinzadeh, B.; Faria da Silva, F.M.; Bak, C.L. Adaptive Tuning of Frequency Thresholds Using Voltage Drop Data in Decentralized Load Shedding. IEEE Trans. Power Syst. 2015, 30, 2055–2062. [Google Scholar] [CrossRef]
- Ahmadi, S.; Shokoohi, S.; Bevrani, H. A fuzzy logic-based droop control for simultaneous voltage and frequency regulation in an AC microgrid. Electr. Power Energy Syst. 2015, 64, 148–155. [Google Scholar] [CrossRef]
- Mai Ersdal, A.; Imsland, L.; Uhlen, K.; Fabozzi, D.; Thornhill, N.F. Model predictive load—Frequency control taking into account imbalance uncertainty. Control. Eng. Pract. 2016, 53, 139–150. [Google Scholar] [CrossRef]
- Hota, P.K.; Mohanty, B. Automatic generation control of multi-source power generation under deregulated environment. Electr. Power Energy Syst. 2016, 75, 205–214. [Google Scholar] [CrossRef]
- Papadimitriou, C.; Vovos, N. A Fuzzy Control Scheme for Integration of DGs into a Microgrid. In Proceedings of the 15th IEEE Mediterranean Electrotechnical Conference Melecon, Valletta, Malta, 26–28 April 2010; pp. 872–877. [Google Scholar]
- CIGRE. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; CIGRE Task Force C6.04.02; CIGRE: Paris, France, 2009. [Google Scholar]
Figure 1.
Schematic example of the proposed “web-of-cells” (WoC) architecture.
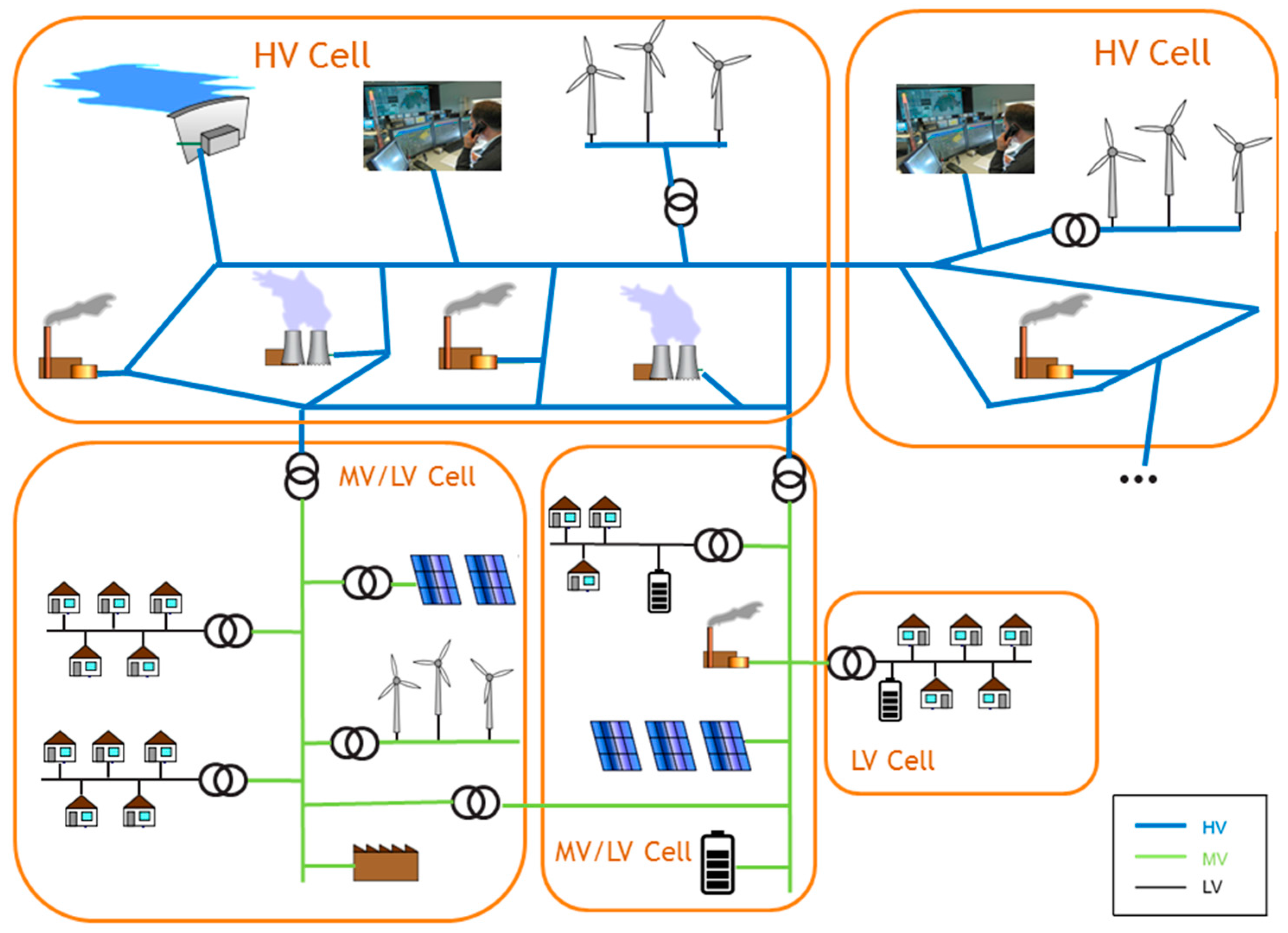
Figure 2.
Block diagram of the adaptive control implementation for cell i.
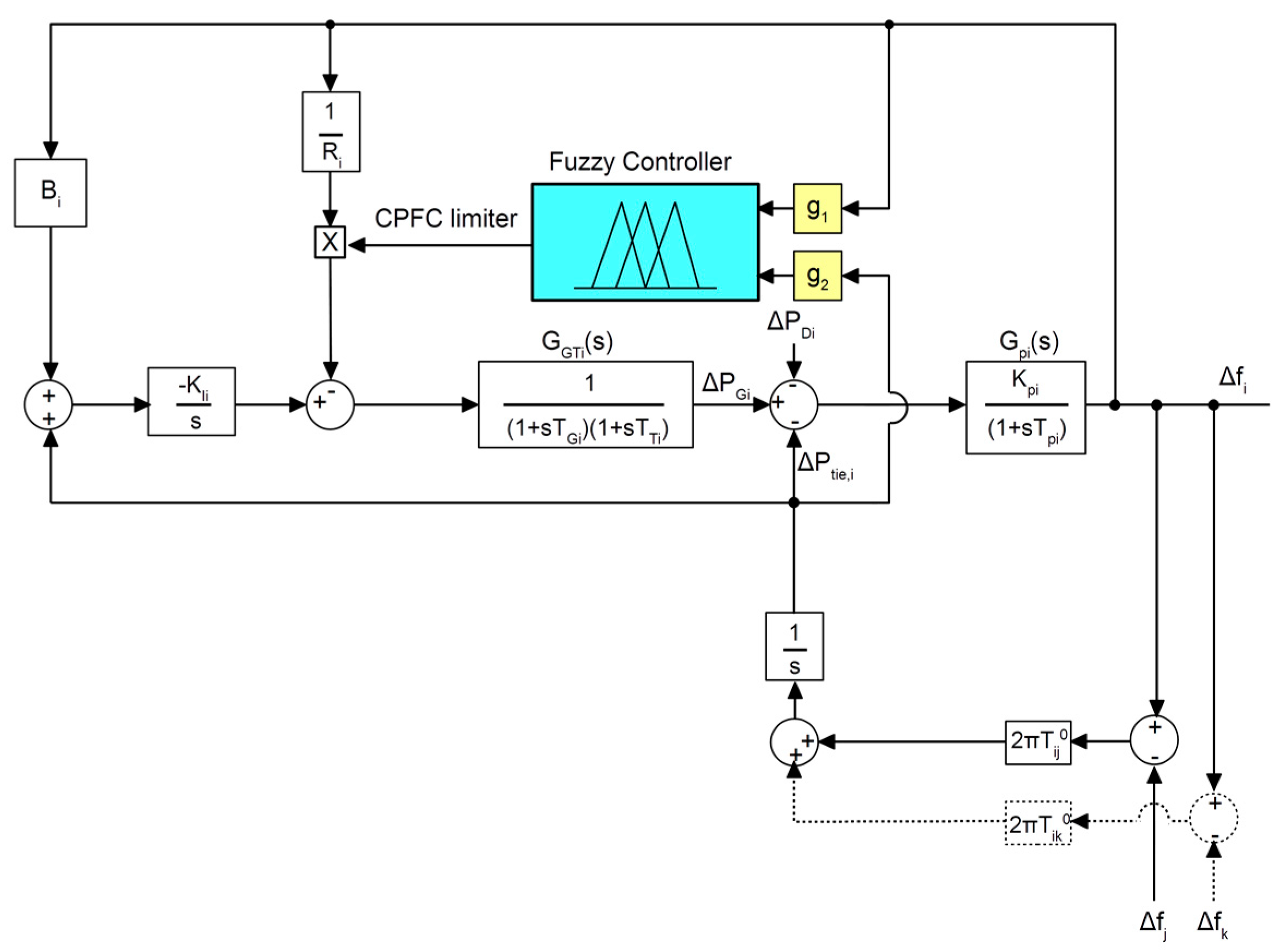
Figure 3.
Fuzzy logic controller membership functions selected for the adaptive FCC control strategy.
Figure 3.
Fuzzy logic controller membership functions selected for the adaptive FCC control strategy.
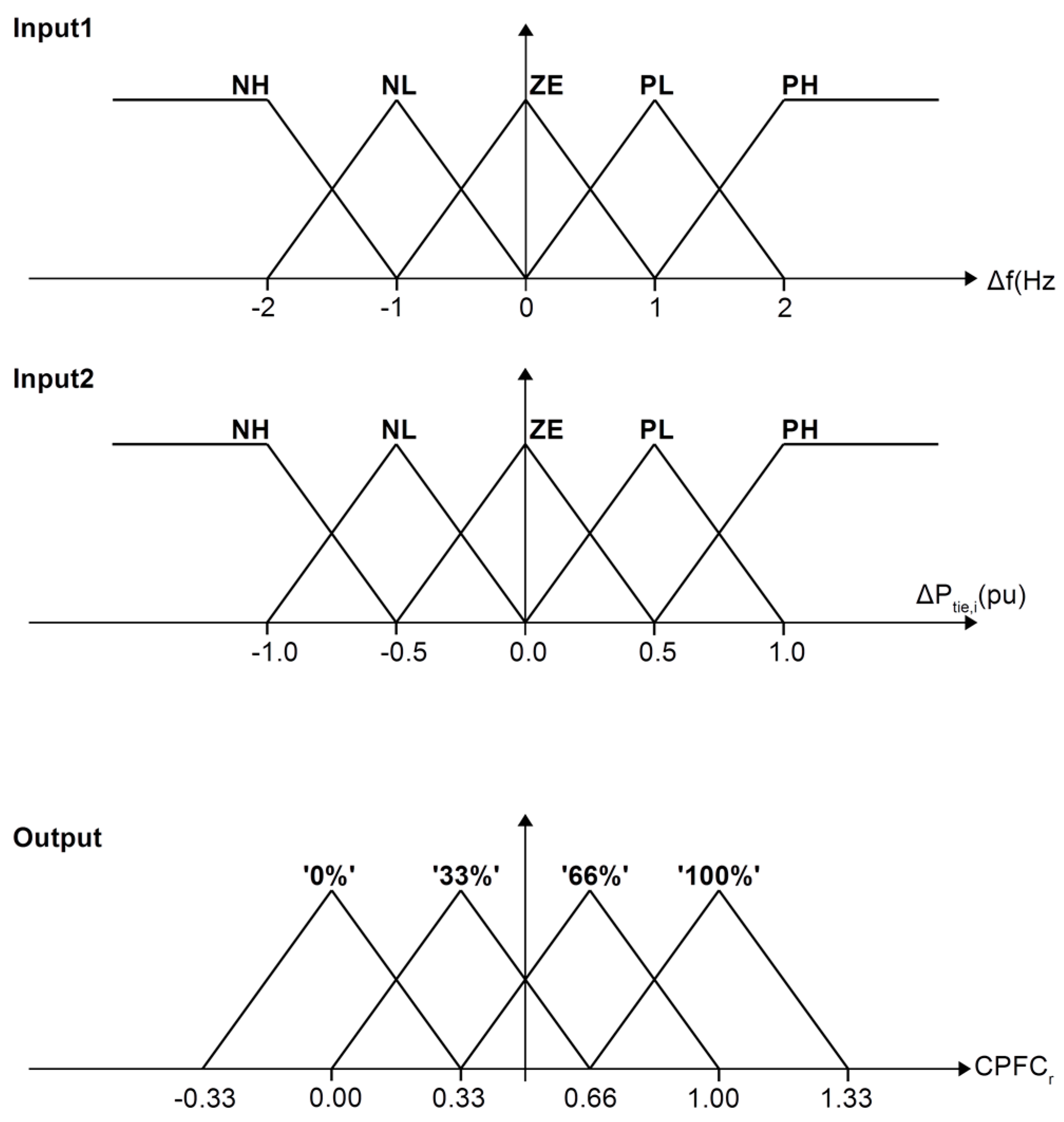
Figure 4.
Reference power grid and simplified WoC diagram: (a) Electrical diagram of the reference power system; (b) Selected WoC configuration.
Figure 4.
Reference power grid and simplified WoC diagram: (a) Electrical diagram of the reference power system; (b) Selected WoC configuration.
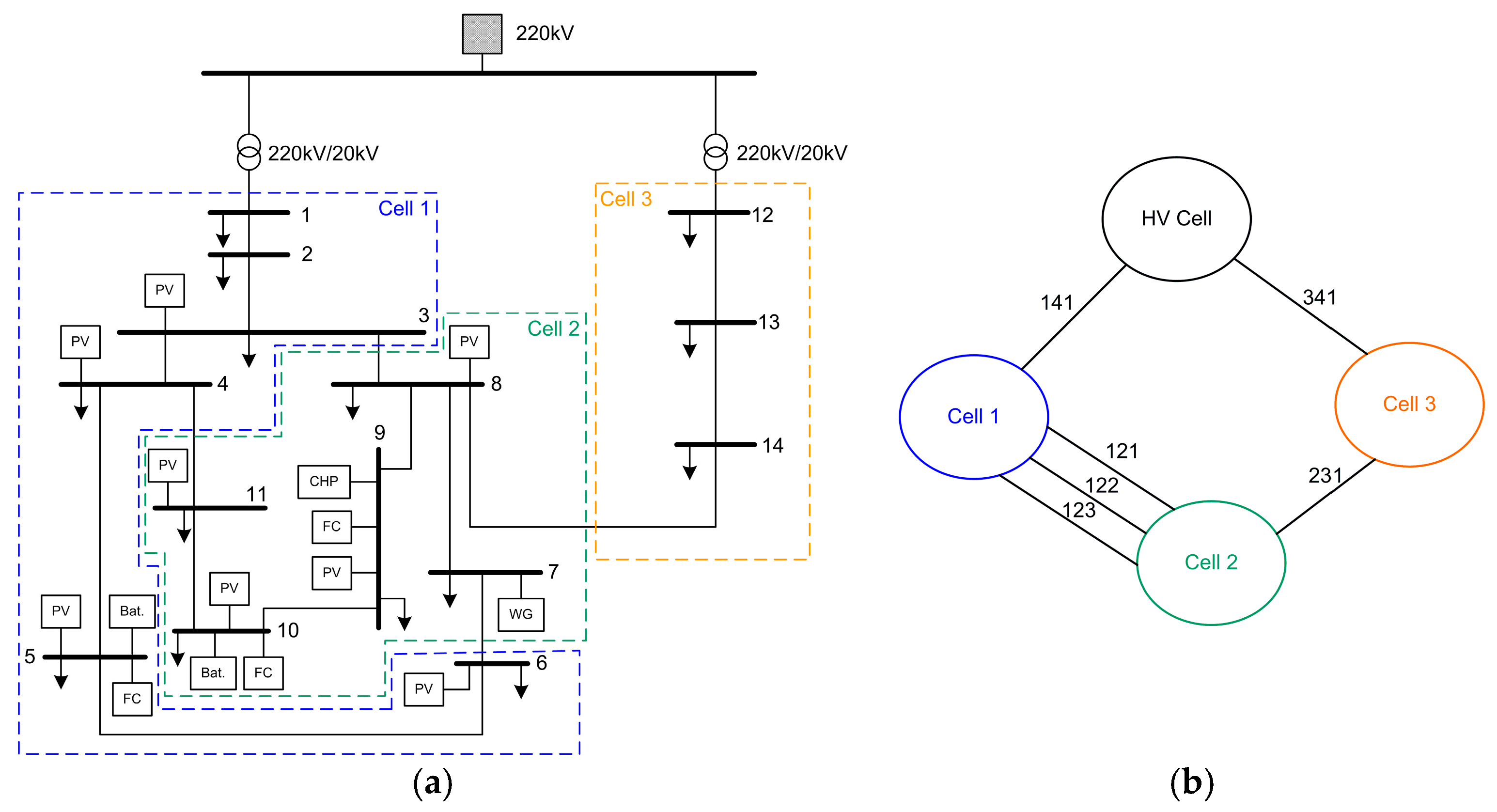
Figure 5.
Simulation results for the short-term analysis of the controller. In both columns, the diagrams show the Cell Power-Frequency Characteristic (CPFC) variation (top), the imbalance (middle), and the frequency response (bottom diagrams): (a) Imbalance incident in cell 1; (b) Imbalance incident in cell 3.
Figure 5.
Simulation results for the short-term analysis of the controller. In both columns, the diagrams show the Cell Power-Frequency Characteristic (CPFC) variation (top), the imbalance (middle), and the frequency response (bottom diagrams): (a) Imbalance incident in cell 1; (b) Imbalance incident in cell 3.
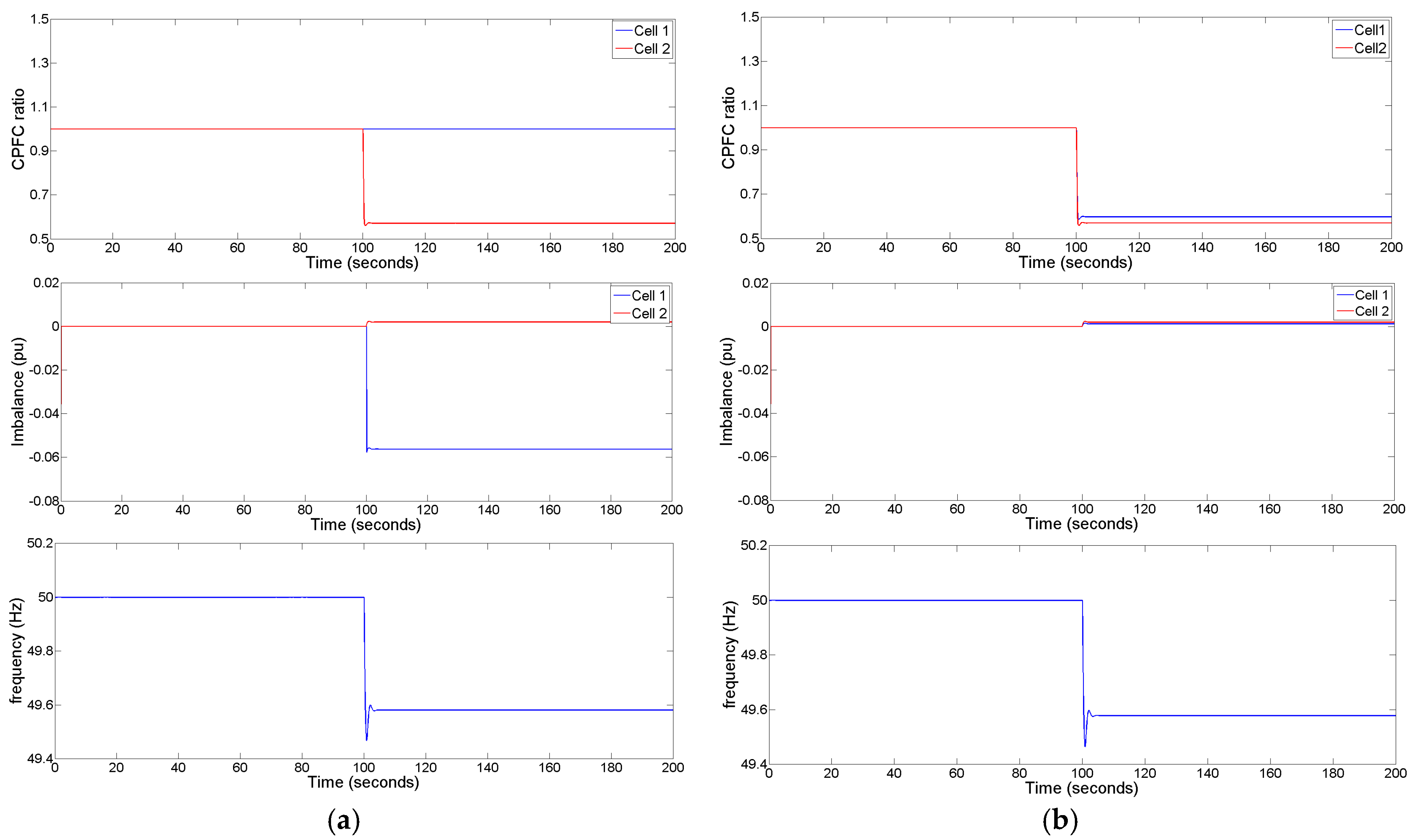
Figure 6.
Input data used for the 24 h tests: (a) Load profile; (b) Wind generation profile; (c) photo voltaics (PV) generation profile.
Figure 6.
Input data used for the 24 h tests: (a) Load profile; (b) Wind generation profile; (c) photo voltaics (PV) generation profile.
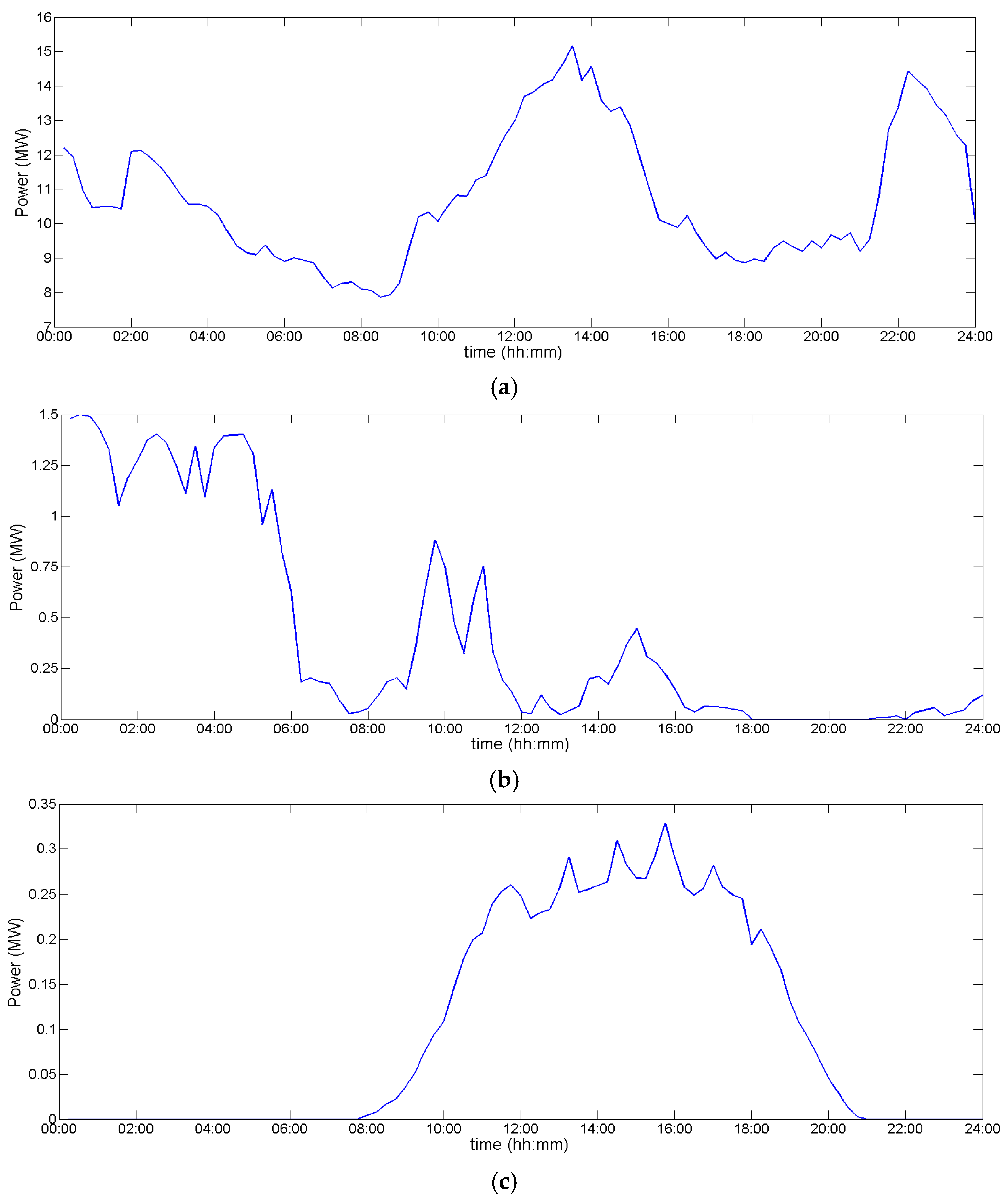
Figure 7.
Frequency response during the 24 h simulation test with the use of adaptive FCC control.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Explanation of the assumed model parameters.
| Symbol | Description |
|---|---|
| Hi | Inertia constant in [s] |
| Di | Load self-regulation in [pu/Hz] |
| Kpi | Area’s constant in [Hz/pu] |
| Tpi | Area’s time constant [s] |
| Gpi(s) | Transfer function of cell i |
| Tij | Tie-line static limit [pu/rad] |
| Ri | Droop slope in [Hz/pu] |
| Bi | Frequency bias [pu/Hz] |
| TGi | Governor’s time constant in [s] |
| TTi | Turbine’s time constant in [s] |
| GGTi(s) | Transfer function of the combined governor-turbine system in cell i |
| KIi | Integrator’s gain |
| g1, g2 | Fuzzy controller input gains for frequency and tie-line power errors |
| Δfi, Δfj, Δfk | Frequency error in cells i, j and k respectively |
| ΔPtie,i | Tie-line power error in cell i |
| ΔPGi, ΔPDi | Deviation of generation and demand in cell i |
Table 2.
Rule table for the adaptive frequency containment control (FCC) controller.
| Δfi | NH | NL | ZE | PL | PH | |
|---|---|---|---|---|---|---|
| ΔPtie,i | ||||||
| NH | 0% | 33% | 100% | 100% | 100% | |
| NL | 33% | 66% | 100% | 100% | 100% | |
| ZE | 66% | 100% | 100% | 100% | 66% | |
| PL | 100% | 100% | 100% | 66% | 33% | |
| PH | 100% | 100% | 100% | 33% | 0% | |
Table 3.
Basic parameters values of the High Voltage (HV) cell during the tests.
| Parameter | Value |
|---|---|
| H | 5 s |
| D | 0.01 pu/Hz |
| Kp | 100 Hz/pu |
| Tp | 20 s |
| B | 1 pu/Hz |
| TG | 0.008 s |
| TT | 0.03 s |
| KI | 0.01 |
Table 4.
Comparison of aggregated usage of FCC reserves with and without adaptive control.
| Function | With Adaptive FCC | With Fixed Droop |
|---|---|---|
| ABS (Reduction) | 8.59 × 107 (Ws) (−19.7%) | 1.07 × 108 (Ws) |
| Cost | 6.94 × 1012 (W2s) | 9.46 × 1012 (W2s) |
| (Reduction) | (−26.7%) | - |
Table 5.
Comparison of curtailment in the renewable energy systems (RES) production for the two FCC versions.
Table 5.
Comparison of curtailment in the renewable energy systems (RES) production for the two FCC versions.
| RES | With Adaptive FCC | With Fixed Droop |
|---|---|---|
| Wind Generation (Reduction) | 1.24 × 108 (Ws) (−18.0%) | 1.51 × 108 (Ws) |
| Photovoltaic Generation | 8.97 × 106 (Ws) | 9.56 × 106 (Ws) |
| (Reduction) | (−6.2%) | - |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Rikos, E.; Caerts, C.; Cabiati, M.; Syed, M.; Burt, G. Adaptive Fuzzy Control for Power-Frequency Characteristic Regulation in High-RES Power Systems. Energies 2017, 10, 982. https://doi.org/10.3390/en10070982
AMA Style
Rikos E, Caerts C, Cabiati M, Syed M, Burt G. Adaptive Fuzzy Control for Power-Frequency Characteristic Regulation in High-RES Power Systems. Energies. 2017; 10(7):982. https://doi.org/10.3390/en10070982
Chicago/Turabian StyleRikos, Evangelos, Chris Caerts, Mattia Cabiati, Mazheruddin Syed, and Graeme Burt. 2017. "Adaptive Fuzzy Control for Power-Frequency Characteristic Regulation in High-RES Power Systems" Energies 10, no. 7: 982. https://doi.org/10.3390/en10070982
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.