
Evaluation Method for Real-Time Dynamic Line Ratings Based on Line Current Variation Model for Representing Forecast Error of Intermittent Renewable Generation

Abstract
:1. Introduction
2. Simulation Model for Line Temperature
2.1. Steady-State Model
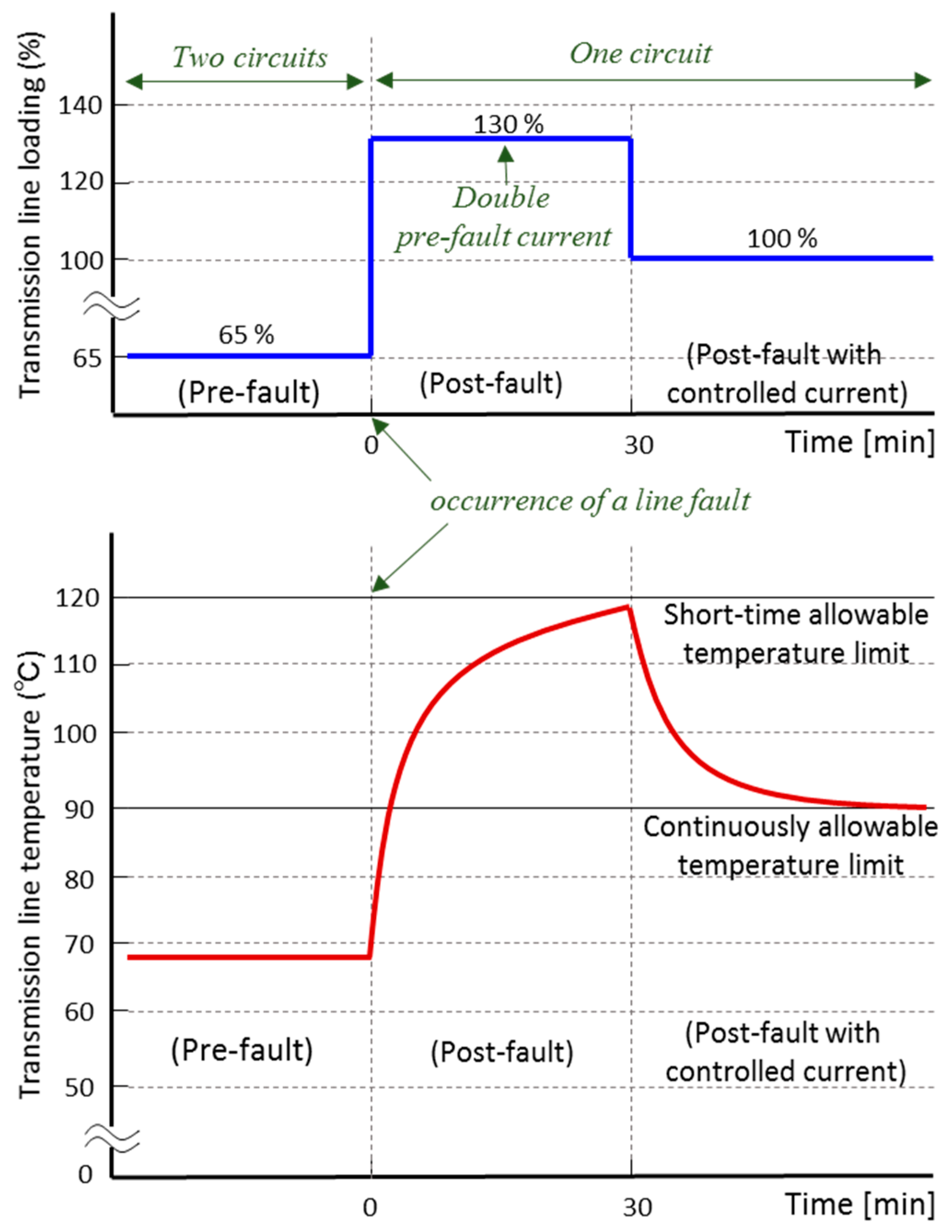
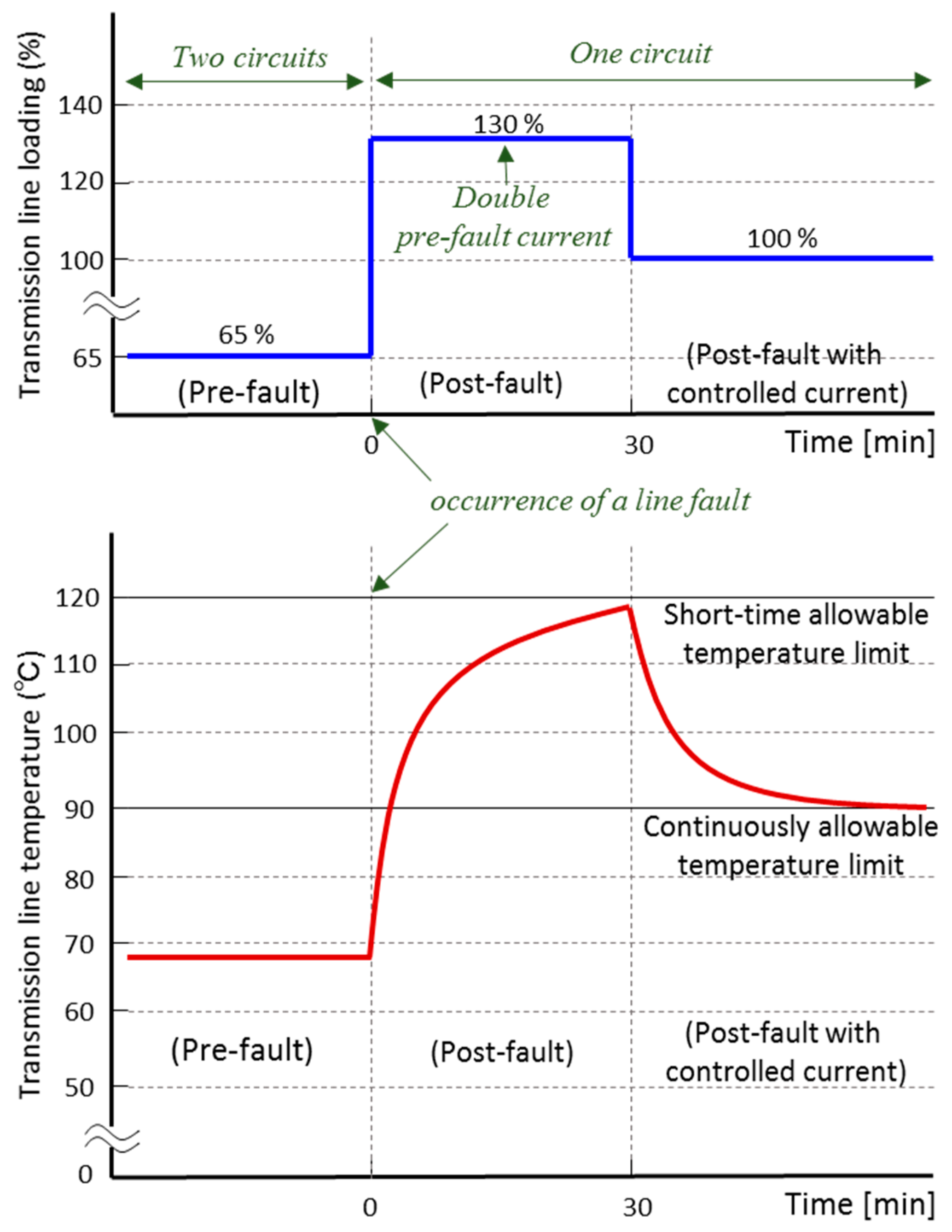
2.2. Transient-State Model
3. Continuous-Time Forecasting Error Model for Renewable Energy Output
3.1. Conventional Step Change in Line Current
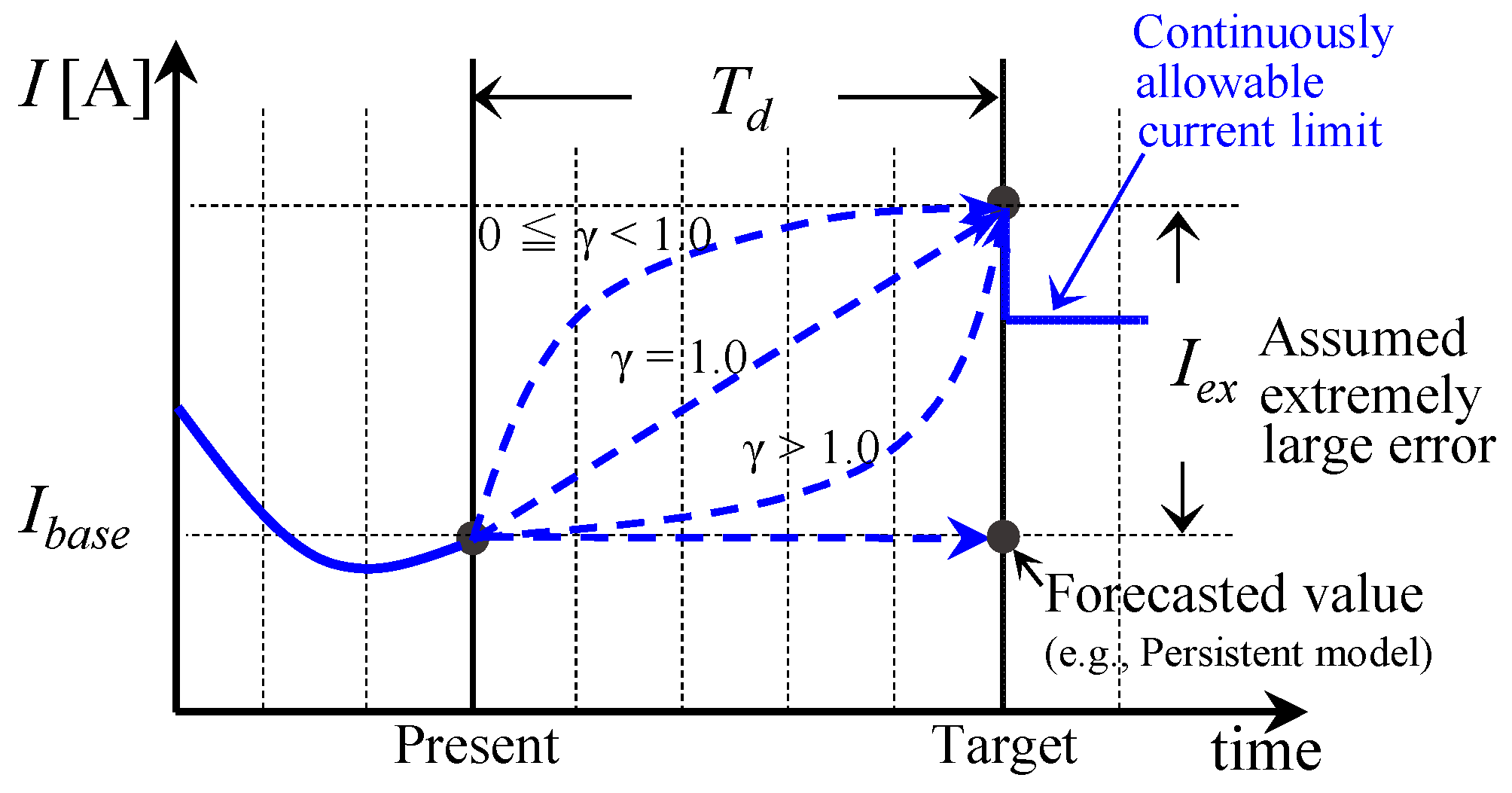
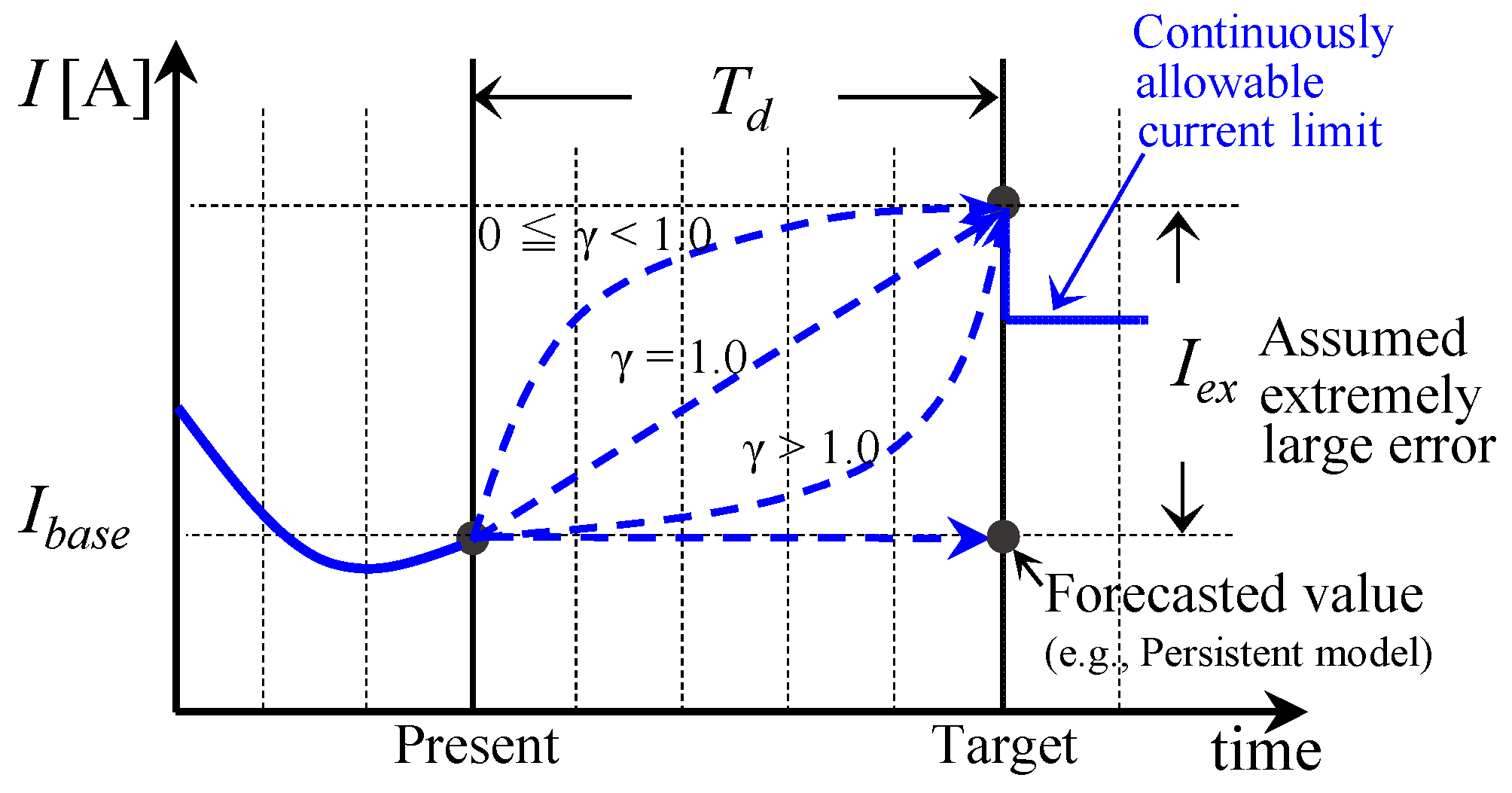
3.2. Proposed Line Current Variation Model for Representing Extremely Large Forecasting Errors
3.3. Method for Determining the Shape Parameter γ
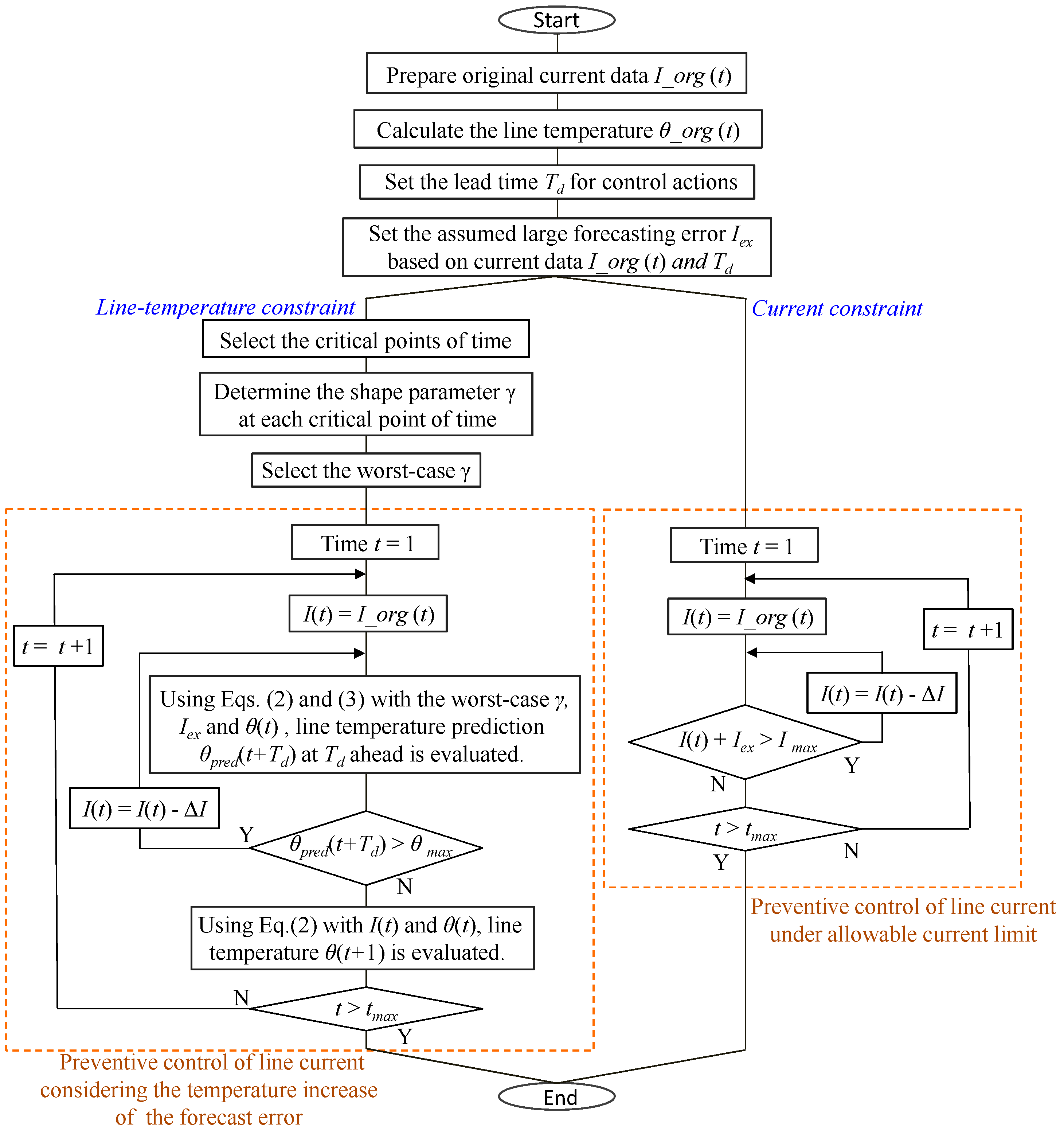
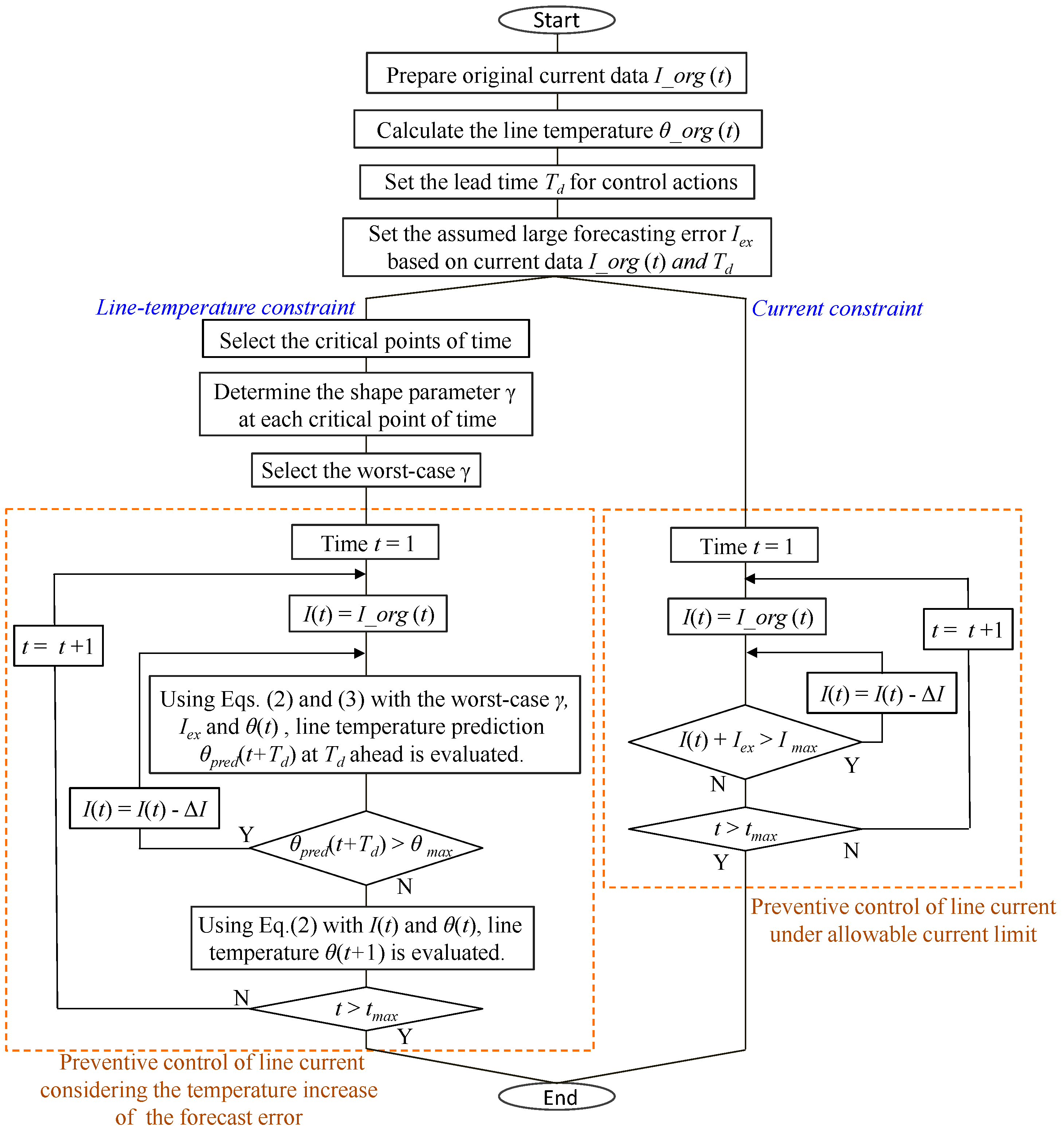
3.4. Flowchart for Long-Term Evaluation from a Preventive Control Viewpoint
4. Simulation Evaluation
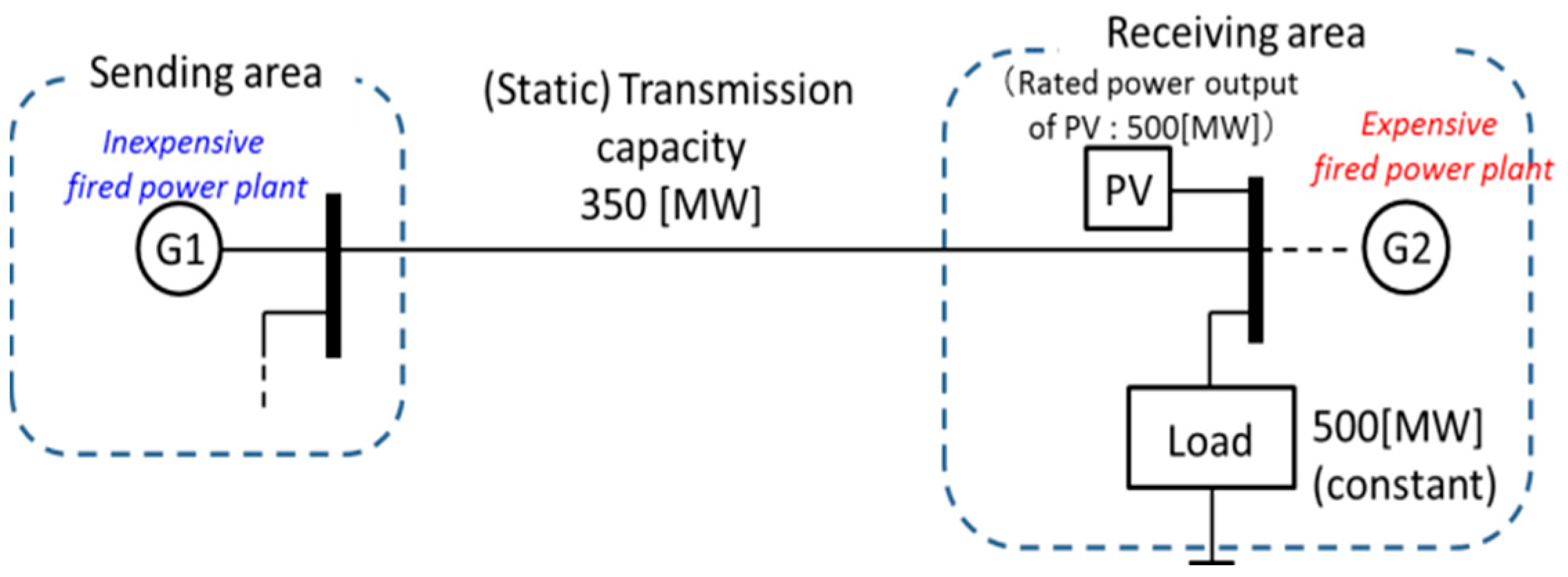
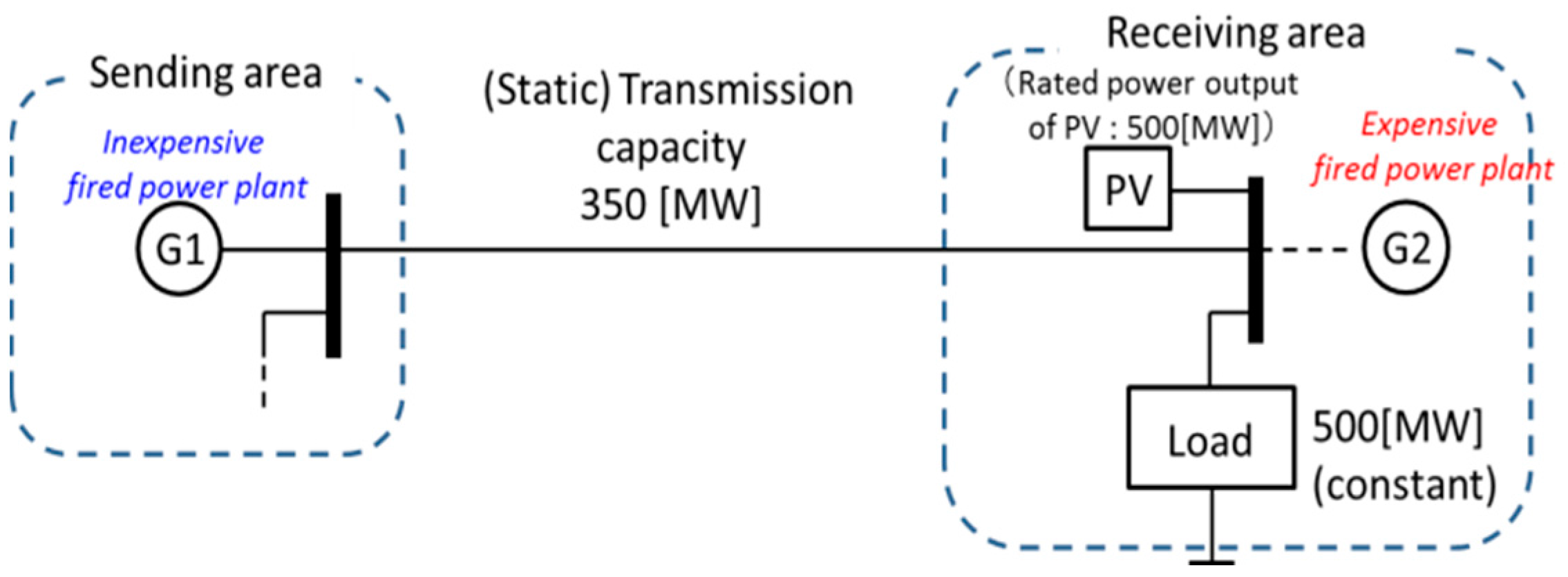
4.1. Simulation Conditions
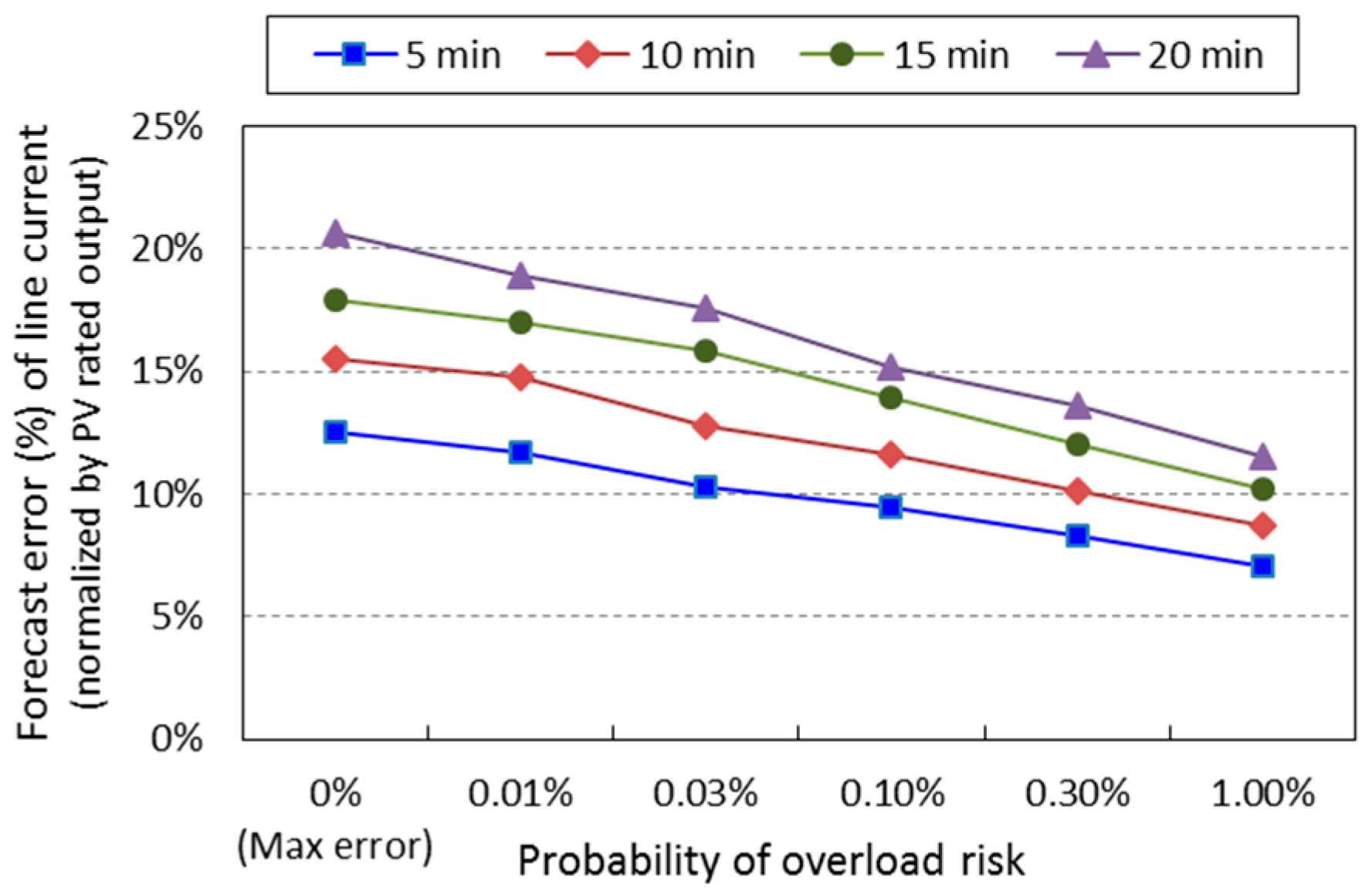
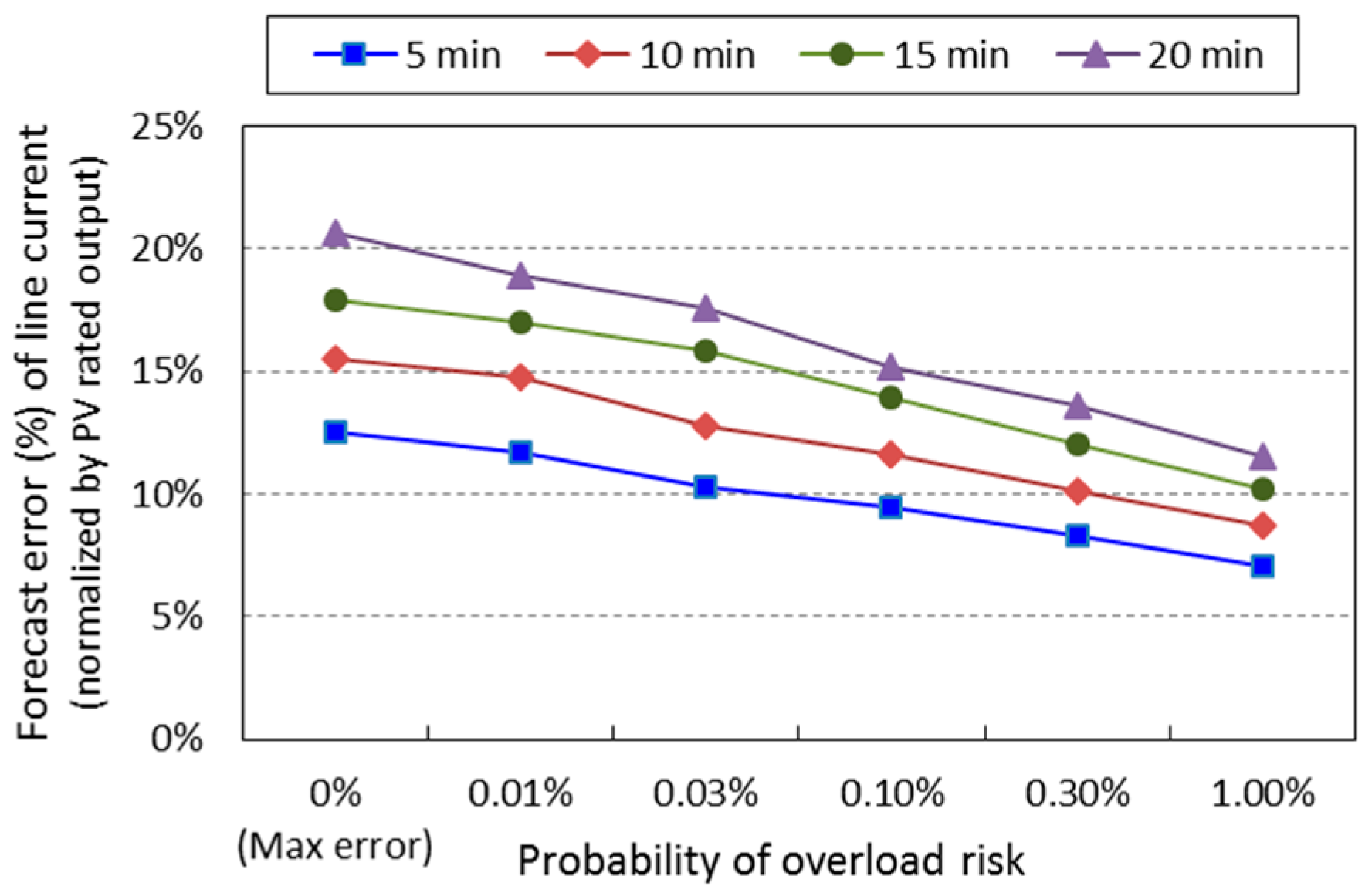
4.2. Evaluation of Forecasting Error
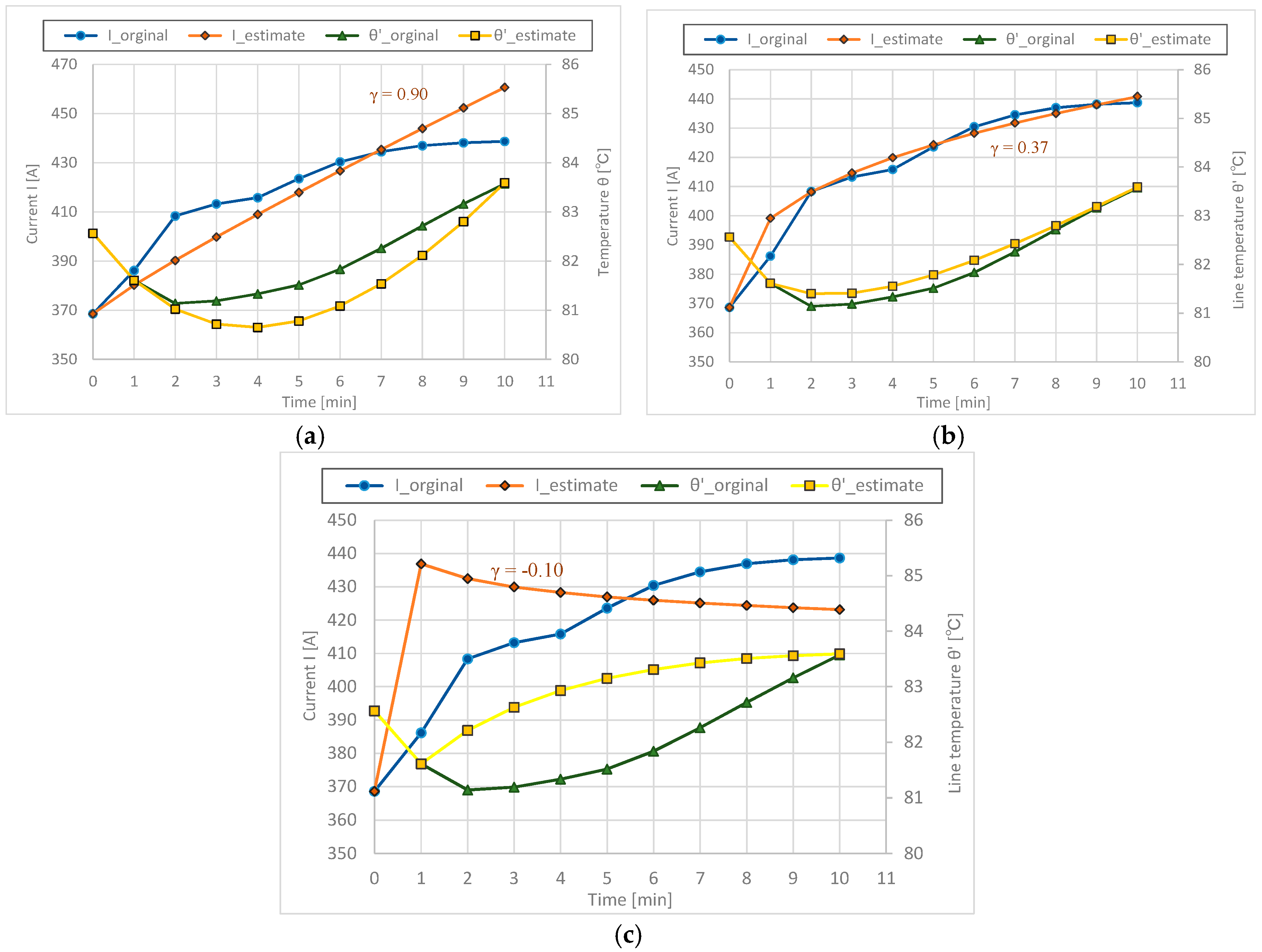
4.3. Evaluation of Shape Parameter γ
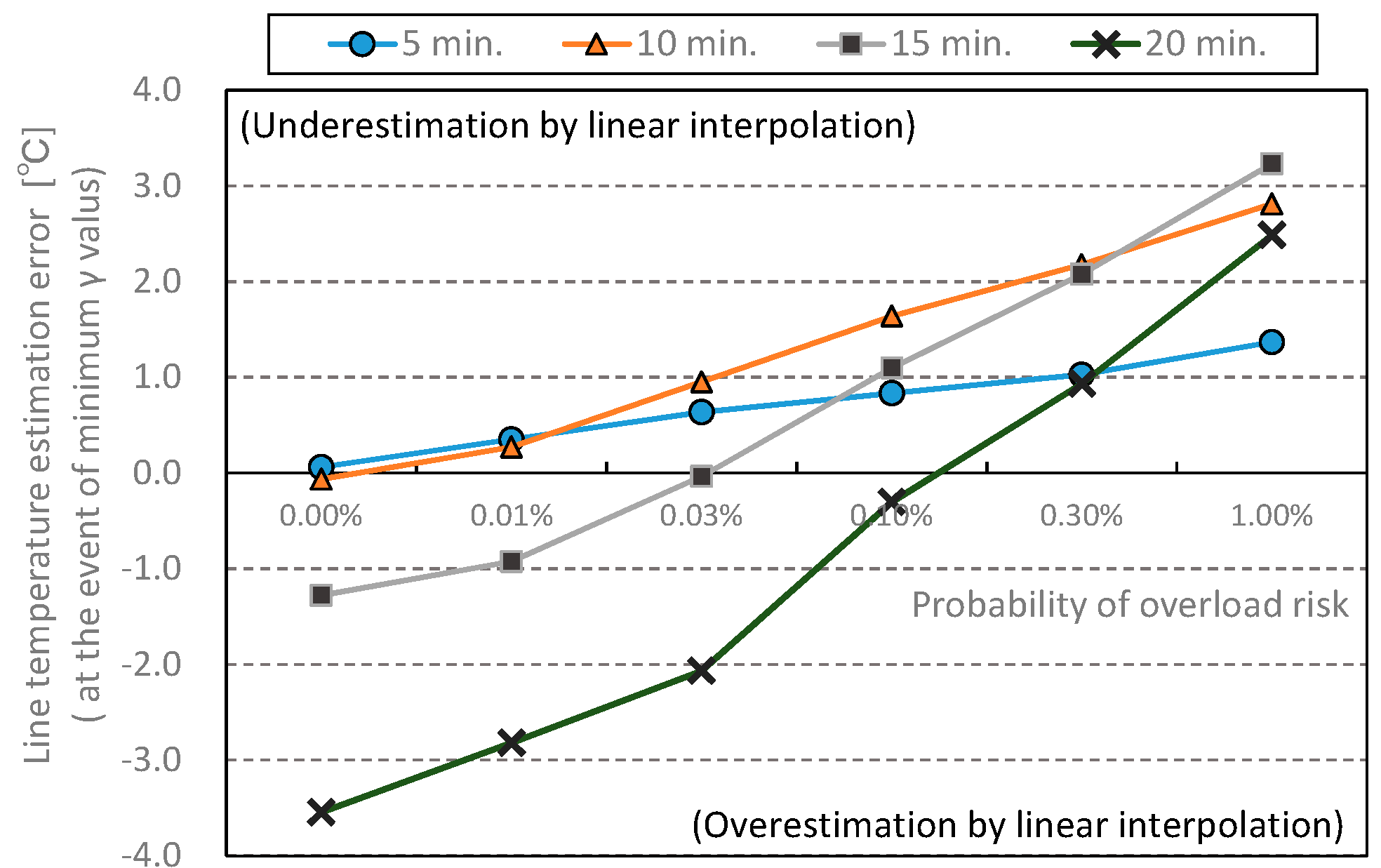
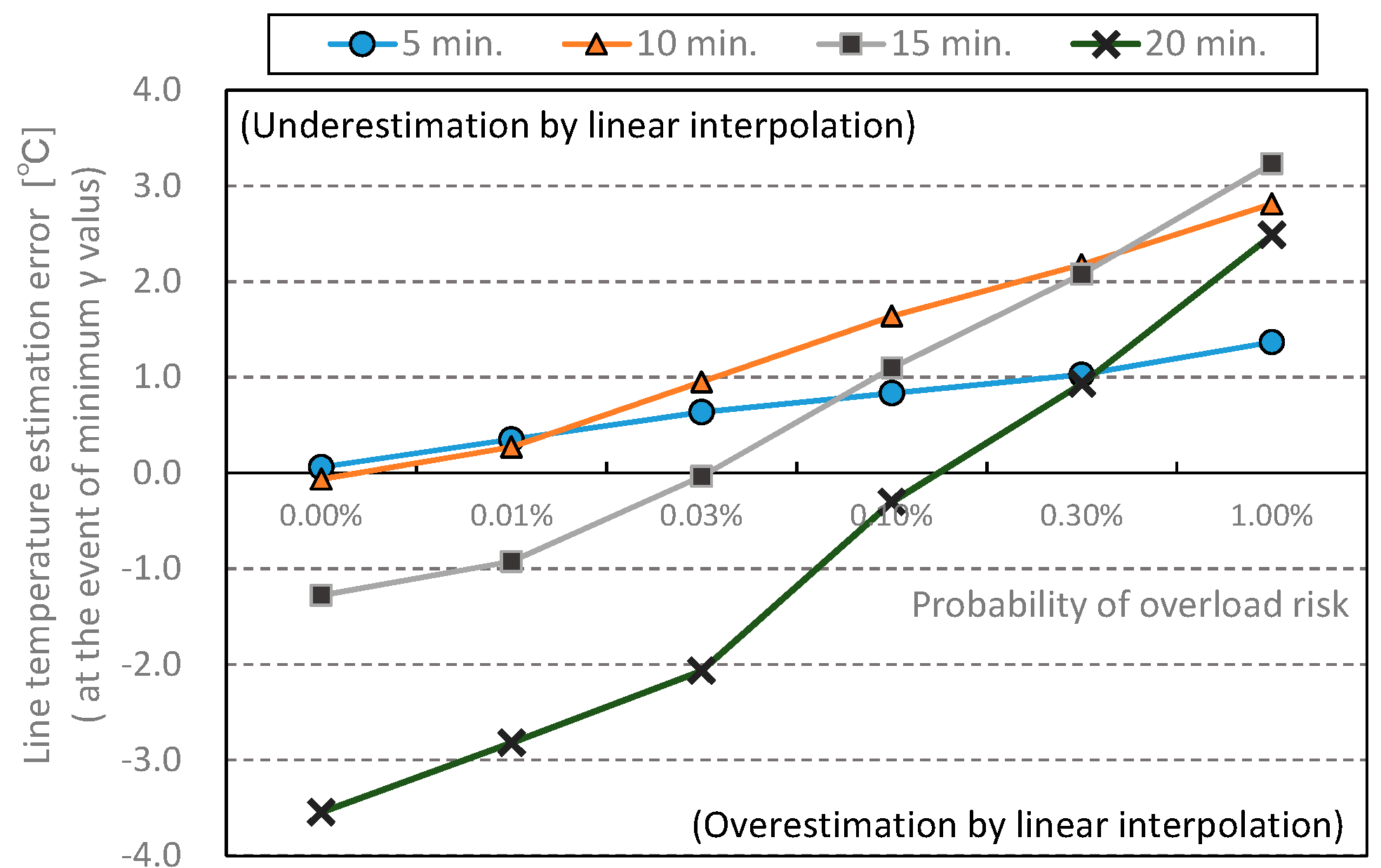
4.4. Comparison with Linear Interpolation
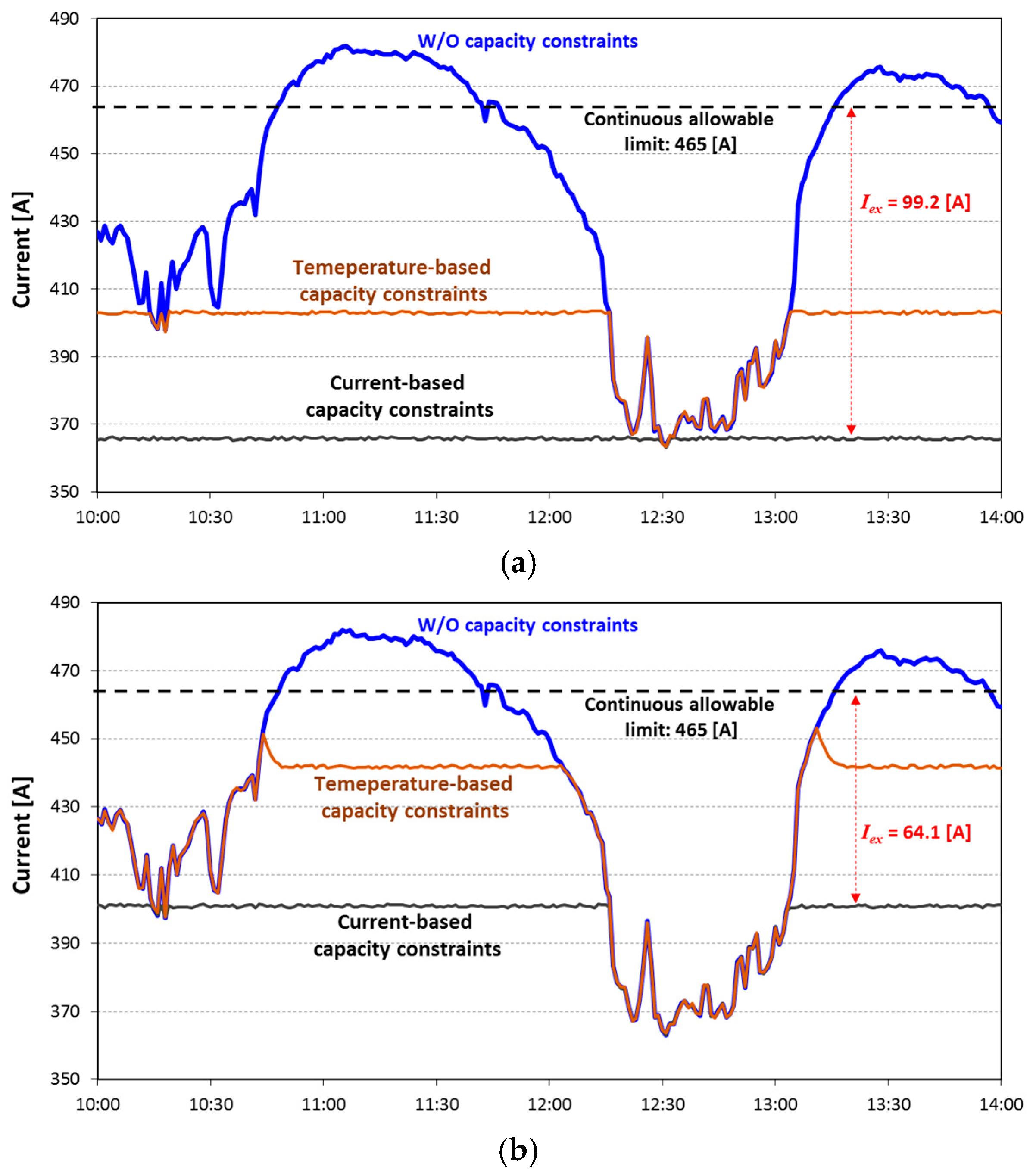
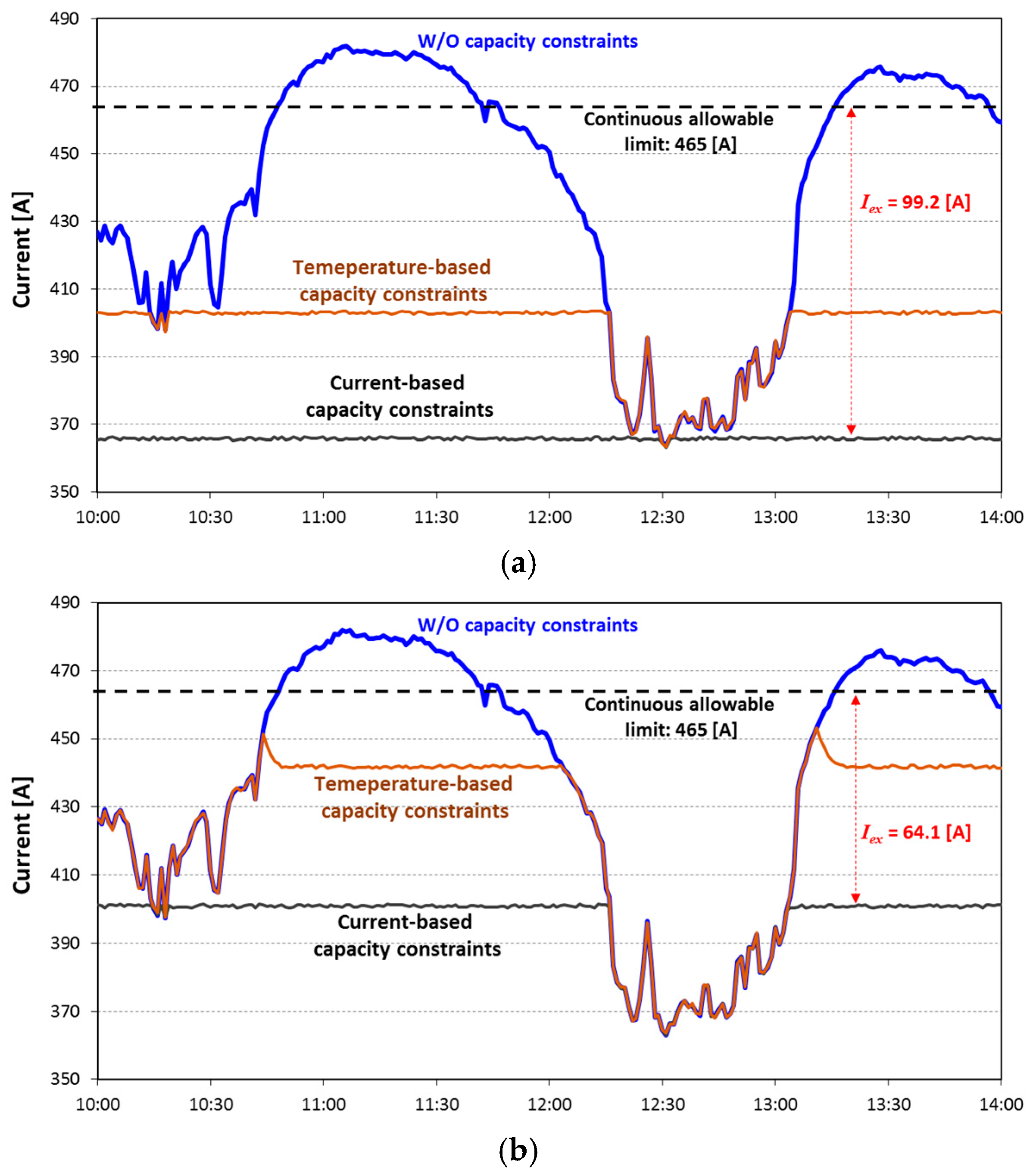
4.5. Simulation Results on a Sample Day
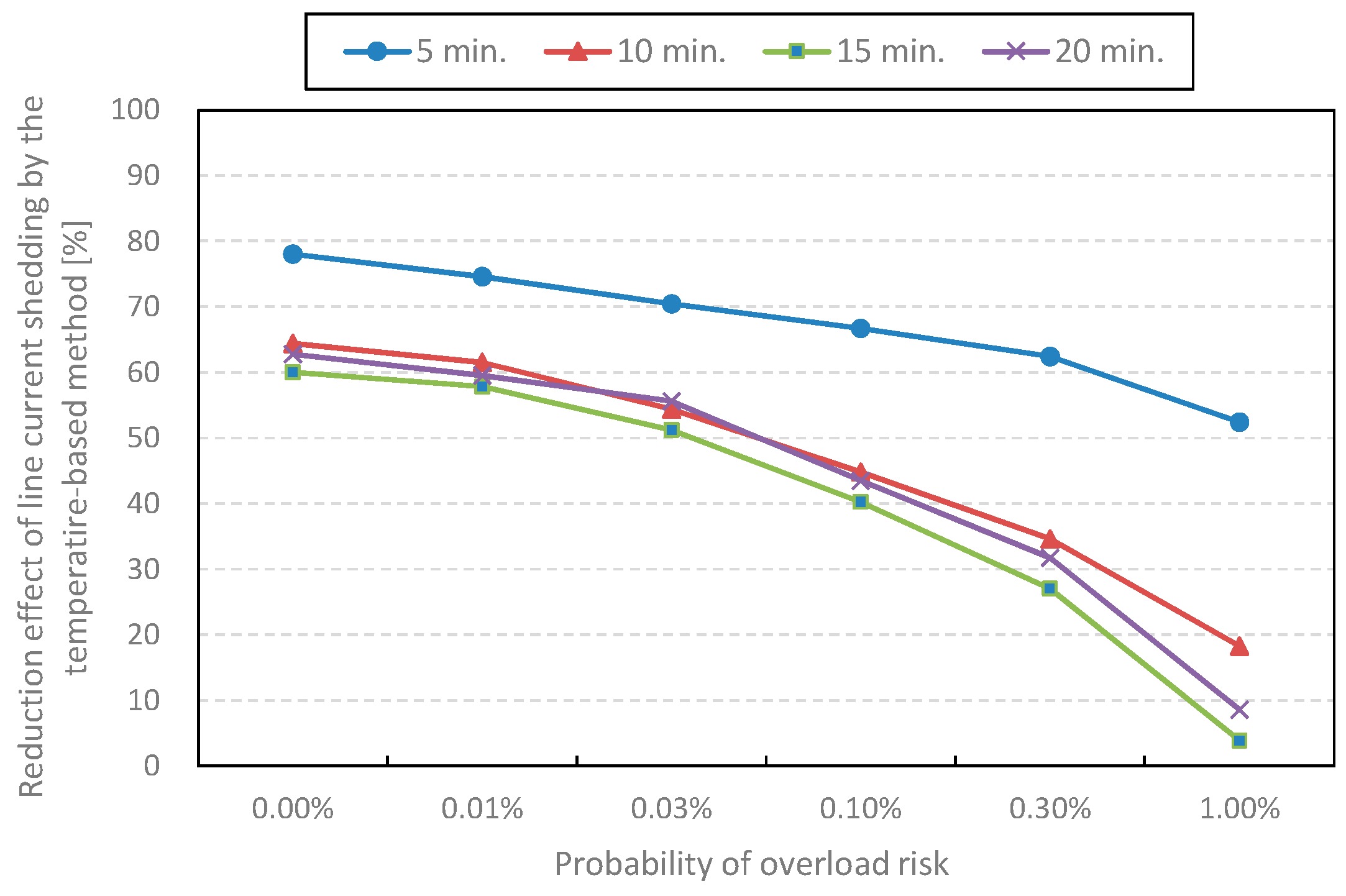
4.6. Simulation Results Using Annual Data
5. Discussion and Further Research
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
- -
- Radiative cooling (Stefan–Boltzman Law):
- -
- Convective cooling (forced convection case: ):where T is the ambient temperature (°C), is the emissivity, y is the elevation (m), v is the wind velocity (m/s), is the wind direction angle (deg), and d is the diameter (cm).
References
- Ssekulima, E.B.; Anwar, M.B.; Al Hinai, A.; El Moursi, M.S. Wind speed and solar irradiance forecasting techniques for enhanced renewable energy integration with the grid: A review. IET. Renew. Power Gener. 2016, 10, 885–898. [Google Scholar] [CrossRef]
- Inman, R.H.; Pedro, H.T.C.; Coimbra, C.F.M. Solar forecasting methods for renewable energy integration. Prog. Energy Combust. Sci. 2013, 39, 535–576. [Google Scholar] [CrossRef]
- Shao, H.; Wei, H.; Deng, X.; Xing, S. Short-term wind speed forecasting using wavelet transformation and AdaBoosting neural networks in Yunnan wind farm. IET. Renew. Power Gener. 2016. [Google Scholar] [CrossRef]
- Stephen, B.; Galloway, S.; McMillan, D.; Anderson, L.; Ault, G. Statistical profiling of site wind resource speed and directional characteristics. IET. Renew. Power Gener. 2013, 7, 583–592. [Google Scholar] [CrossRef]
- Chitsaz, H.; Amjady, N.; Zareipour, H. Wind power forecast using wavelet neural network trained by improved Clonal selection algorithm. Energy Convers. Manag. 2015, 89, 588–598. [Google Scholar] [CrossRef]
- Nijhuis, M.; Rawn, B.; Gibescu, M. Prediction of power fluctuation classes for photovoltaic installations and potential benefits of dynamic reserve allocation. IET. Renew. Power Gener. 2014, 8, 314–323. [Google Scholar] [CrossRef]
- Yang, C.; Thatte, A.A.; Xie, L. Multitime-scale data-driven spatio-temporal forecast of photovoltaic generation. IEEE Trans. Sustain. Energy 2015, 6, 104–112. [Google Scholar] [CrossRef]
- Golestaneh, F.; Pinson, P.; Gooi, H.B. Very short-term nonparametric probabilistic forecasting of renewable energy generation—With application to solar energy. IEEE Trans. Power Syst. 2016, 31, 3850–3863. [Google Scholar] [CrossRef]
- Ganger, D.; Zhang, J.; Vittal, V. Statistical characterization of wind power ramps via extreme value analysis. IEEE Trans. Power Syst. 2014, 29, 3118–3119. [Google Scholar] [CrossRef]
- Davis, M.W. A new thermal rating approach: The real time thermal rating system for strategic overhead conductor transmission lines—Part I: General description and justification of the real time thermal rating system. IEEE Trans. Power Appl. Syst. 1977, 96, 803–809. [Google Scholar] [CrossRef]
- Douglass, D.A.; Edris, A. Real-time monitoring and dynamic thermal rating of power transmission circuits. IEEE Trans. Power Deliv. 1996, 11, 1407–1418. [Google Scholar] [CrossRef]
- Douglass, D.; Chisholm, W.; Davidson, G.; Grant, I.; Lindsey, K.; Lancaster, M.; Lawry, D.; McCarthy, T.; Nascimento, C.; Pasha, M.; et al. Real-Time overhead transmission line monitoring for dynamic rating. IEEE Trans. Power Deliv. 2016, 31, 921–927. [Google Scholar] [CrossRef]
- Morrow, D.J.; Fu, J.; Abdelkader, S.M. Experimentally validated partial least squares model for dynamic line rating. IET. Renew. Power Gener. 2014, 8, 260–268. [Google Scholar] [CrossRef]
- Teh, J.; Cotton, I. Risk informed design modification of dynamic thermal rating system. IET Gener. Transm. Distrib. 2015, 9, 2697–2704. [Google Scholar] [CrossRef]
- Teh, J.; Cotton, I. Critical span identification model for dynamic thermal rating system placement. IET Gener. Transm. Distrib. 2015, 9, 2644–2652. [Google Scholar] [CrossRef]
- Uski, S. Estimation method for dynamic line rating potential and economic benefits. Int. J. Electr. Power Energy Syst. 2015, 65, 76–82. [Google Scholar] [CrossRef]
- Bucher, M.A.; Andersson, G. Robust corrective control measures in power systems with dynamic line rating. IEEE Trans. Power Syst. 2016, 31, 2034–2043. [Google Scholar] [CrossRef]
- Cao, J.; Du, W.; Wang, H.F. Weather-based optimal power flow with wind farms integration. IEEE Trans. Power Syst. 2016, 31, 3073–3081. [Google Scholar] [CrossRef]
- Nick, M.; Alizadeh-Mousavi, O.; Cherkaoui, R.; Paolone, M. Security constrained unit commitment with dynamic thermal line rating. IEEE Trans. Power Syst. 2016, 31, 2014–2025. [Google Scholar] [CrossRef]
- Maslennikov, S.; Litvinov, E. Adaptive emergency transmission rates in power system and market operation. IEEE Trans. Power Syst. 2009, 24, 923–929. [Google Scholar] [CrossRef]
- Cong, Y.; Wall, P.; Regulski, P.; Osborne, M.; Terzija, V. On the use of dynamic thermal line ratings for improving operational tripping schemes. IEEE Trans. Power Deliv. 2016, 31, 1891–1900. [Google Scholar] [CrossRef]
- Banerjee, B.; Jayaweera, D.; Islam, S. Assessment of post-contingency congestion risk of wind power with asset dynamic ratings. Int. J. Electr. Power Energy Syst. 2015, 69, 295–303. [Google Scholar] [CrossRef]
- Schläpfer, M.; Mancarella, P. Probabilistic modeling and simulation of transmission line temperatures under fluctuating power flows. IEEE Trans. Power Deliv. 2011, 26, 2235–2243. [Google Scholar] [CrossRef]
- Yang, Y.; Harley, R.G.; Divan, D.; Habetler, T.G. Overhead conductor thermal dynamics identification by using Echo State Networks. In Proceedings of the 2009 IEEE International Joint Conference on Neural Networks (IJCNN 2009), Atlanta, GA, USA, 14–19 June 2009; pp. 3436–3443. [Google Scholar]
- Olsen, R.; Holboell, J.; Gudmundsdot́tir, U.S. Electro-thermal coordination in cable based transmission grids. IEEE Trans. Power Syst. 2013, 28, 4867–4874. [Google Scholar] [CrossRef]
- International Council on Large Electric Systems (CIGRE). Thermal Behavior of Overhead Conductors; Technical Brochure No. 207; CIGRE: Paris, France, 2002. [Google Scholar]
- Arroyo, A.; Castro, P.; Martinez, R.; Manana, M.; Madrazo, A.; Lecuna, R.; Gonzalez, A. Comparison between IEEE and CIGRE thermal behaviour standards and measured temperature on a 132-kV overhead power line. Energies 2015, 8, 13660–13671. [Google Scholar] [CrossRef]
- Simms, M.; Meegahapola, L. Comparative analysis of dynamic line rating models and feasibility to minimise energy losses in wind rich power networks. Energy Convers. Manag. 2013, 75, 11–20. [Google Scholar] [CrossRef]
- Uchida, N.; Kawata, K.; Egawa, M. Development of test case models for japanese power systems. In Proceedings of the 2000 IEEE PES Summer Meeting, Seattle, WA, USA, 16–20 July 2000. [Google Scholar]
- Japanese Power System Models. Institute of Electrical Engineers of Japan. Available online: http://www.iee.jp/pes/?page_id=141 (accessed on 6 February 2017).
- Nagoya, H.; Komami, S.; Ogimoto, K. A method for presuming total output fluctuation of highly penetrated photovoltaic generation considering mutual smoothing effect. Electr. Eng. Jpn. 2014, 186, 1688–1696. [Google Scholar] [CrossRef]
- Kato, T.; Kumazawa, S.; Honda, N.; Koaizawa, M.; Nishino, S.; Suzuoki, Y. Development of estimation method of spatial average irradiance fluctuation characteristics considering smoothing effect around observation point. Electron. Commun. Jpn. 2014, 97, 1–9. [Google Scholar] [CrossRef]
- Sugihara, H.; Funaki, T.; Yamaguchi, N. A fundamental analysis of temperature-based transmission capacity constraints with high penetration of PV generation considering a spatial smoothing effect. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016. [Google Scholar]
- ERCOT: 2013 ERCOT Methodologies for Determining Ancillary Service Requirements. 2013. Available online: http://www.ercot.com/ (accessed on 6 February 2017).
- Roscoe, A.J.; Ault, G. Supporting high penetrations of renewable generation via implementation of real-time electricity pricing and demand response. IET. Renew. Power Gener. 2016, 4, 369–382. [Google Scholar] [CrossRef]
- Cecati, C.; Citro, C.; Siano, P. Combined operations of renewable energy systems and responsive demand in a smart grid. IEEE Trans. Sustain. Energy 2011, 2, 468–476. [Google Scholar] [CrossRef]
- Pedrasa, M.A.A.; Oro, M.M.; Reyes, N.C.R.; Pedrasa, J.R.I. Demonstration of direct load control of air conditioners in high density residential buildings. In Proceedings of the 2014 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Kuala Lumpur, Malaysia, 20–23 May 2004; pp. 400–405. [Google Scholar]
- Gustafson, M.W.; Baylor, J.S.; Epstein, G. Direct water heater load control—Estimating program effectiveness using an engineering model. IEEE Trans. Power Syst. 1993, 8, 137–143. [Google Scholar] [CrossRef]
- Sugihara, H.; Yokoyama, K.; Saeki, O.; Tsuji, K.; Funaki, T. Economic and efficient voltage management using customer-owned energy storage systems in a distribution network with high penetration of photovoltaic systems. IEEE Trans. Power Syst. 2013, 28, 102–111. [Google Scholar] [CrossRef]
- Noghabi, A.S.; Mashhadi, H.R.; Sadeh, J. Optimal coordination of directional overcurrent relays considering different network topologies using interval linear programming. IEEE Trans. Power Deliv. 2010, 25, 1348–1354. [Google Scholar] [CrossRef]
- El-Khattam, W.; Sidhu, T.S. Resolving the impact of distributed renewable generation on directional overcurrent relay coordination: A case study. IET Renew. Power Gener. 2009, 3, 415–425. [Google Scholar] [CrossRef]
- IEC 60255-3 (1989-06) Electrical Relays-Part 3: Single Input Energizing Quantity Measuring Relays with Dependent or Independent Time; International Electrotechnical Commission: Geneva, Switzerland, 1989.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Typical Value |
|---|---|
| Atmospheric temperature | 40 (°C) |
| Solar irradiation | 0.1 (W/cm2) |
| Wind speed | 0.5 (m/s) |
| Wind direction | 45 (°) |
| Probability | Td = 5 min | Td = 10 min | Td = 15 min | Td = 20 min | ||||
|---|---|---|---|---|---|---|---|---|
| Min γ | Max γ | Min γ | Max γ | Min γ | Max γ | Min γ | Max γ | |
| 0.00% | 0.96 | 1.57 | 1.03 | 4.15 | 1.42 | 5.00 * | 2.22 | 5.00 * |
| 0.01% | 0.78 | 1.35 | 0.90 | 3.92 | 1.31 | 5.00 * | 1.97 | 5.00 * |
| 0.03% | 0.59 | 1.13 | 0.64 | 3.41 | 1.01 | 5.00 * | 1.72 | 5.00 * |
| 0.10% | 0.45 | 0.97 | 0.37 | 2.88 | 0.63 | 4.64 | 1.11 | 5.00 * |
| 0.30% | 0.31 | 0.80 | 0.16 | 2.43 | 0.30 | 3.87 | 0.68 | 5.00 * |
| 1.00% | 0.06 | 0.87 | −0.10 | 1.88 | −0.08 | 2.90 | 0.53 | 5.00 * |
| No. of critical points of time | 4 | 26 | 65 | 139 | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sugihara, H.; Funaki, T.; Yamaguchi, N. Evaluation Method for Real-Time Dynamic Line Ratings Based on Line Current Variation Model for Representing Forecast Error of Intermittent Renewable Generation. Energies 2017, 10, 503. https://doi.org/10.3390/en10040503
Sugihara H, Funaki T, Yamaguchi N. Evaluation Method for Real-Time Dynamic Line Ratings Based on Line Current Variation Model for Representing Forecast Error of Intermittent Renewable Generation. Energies. 2017; 10(4):503. https://doi.org/10.3390/en10040503
Chicago/Turabian StyleSugihara, Hideharu, Tsuyoshi Funaki, and Nobuyuki Yamaguchi. 2017. "Evaluation Method for Real-Time Dynamic Line Ratings Based on Line Current Variation Model for Representing Forecast Error of Intermittent Renewable Generation" Energies 10, no. 4: 503. https://doi.org/10.3390/en10040503