2.1. Establishment of the Equivalent Analysis Circuit
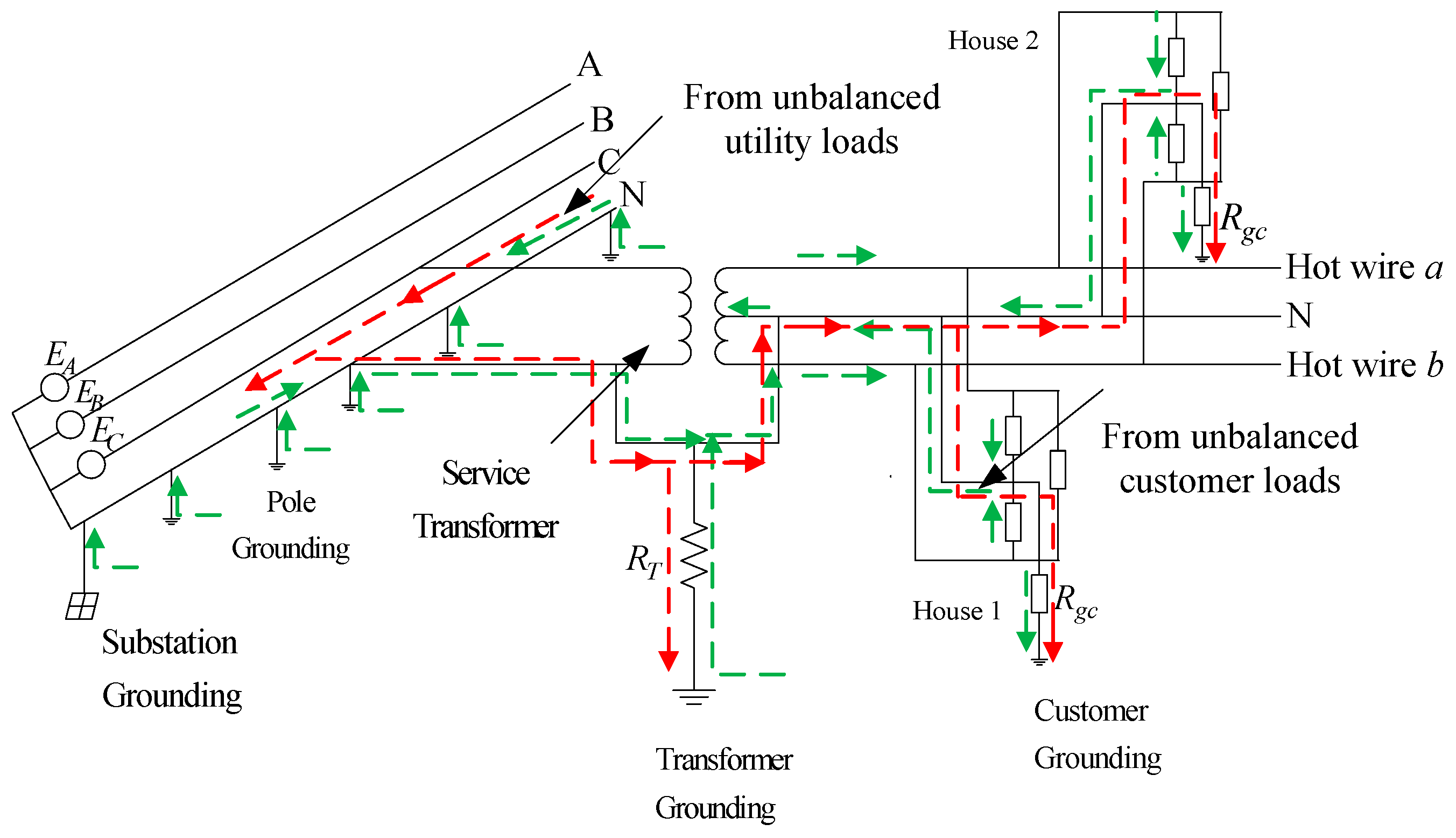
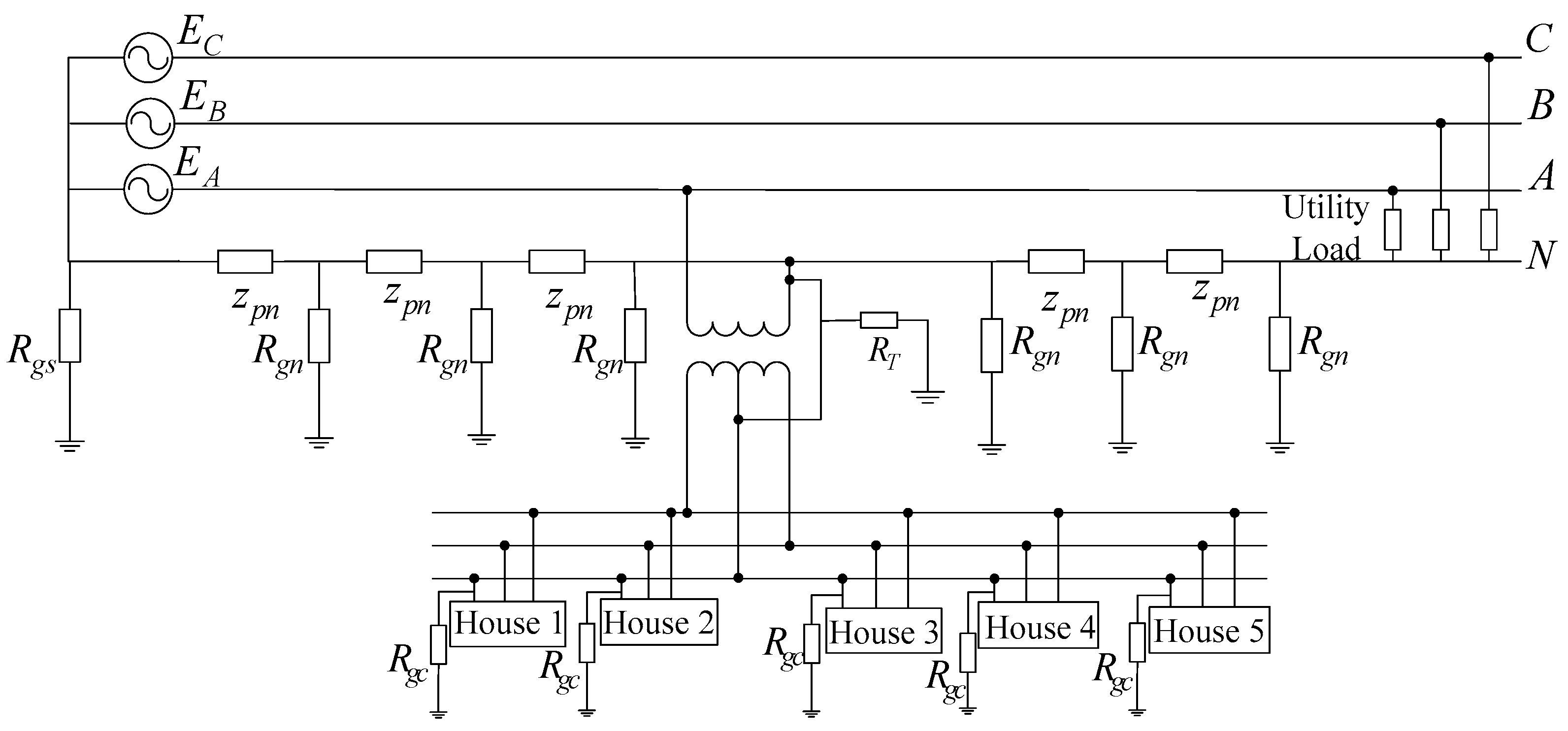
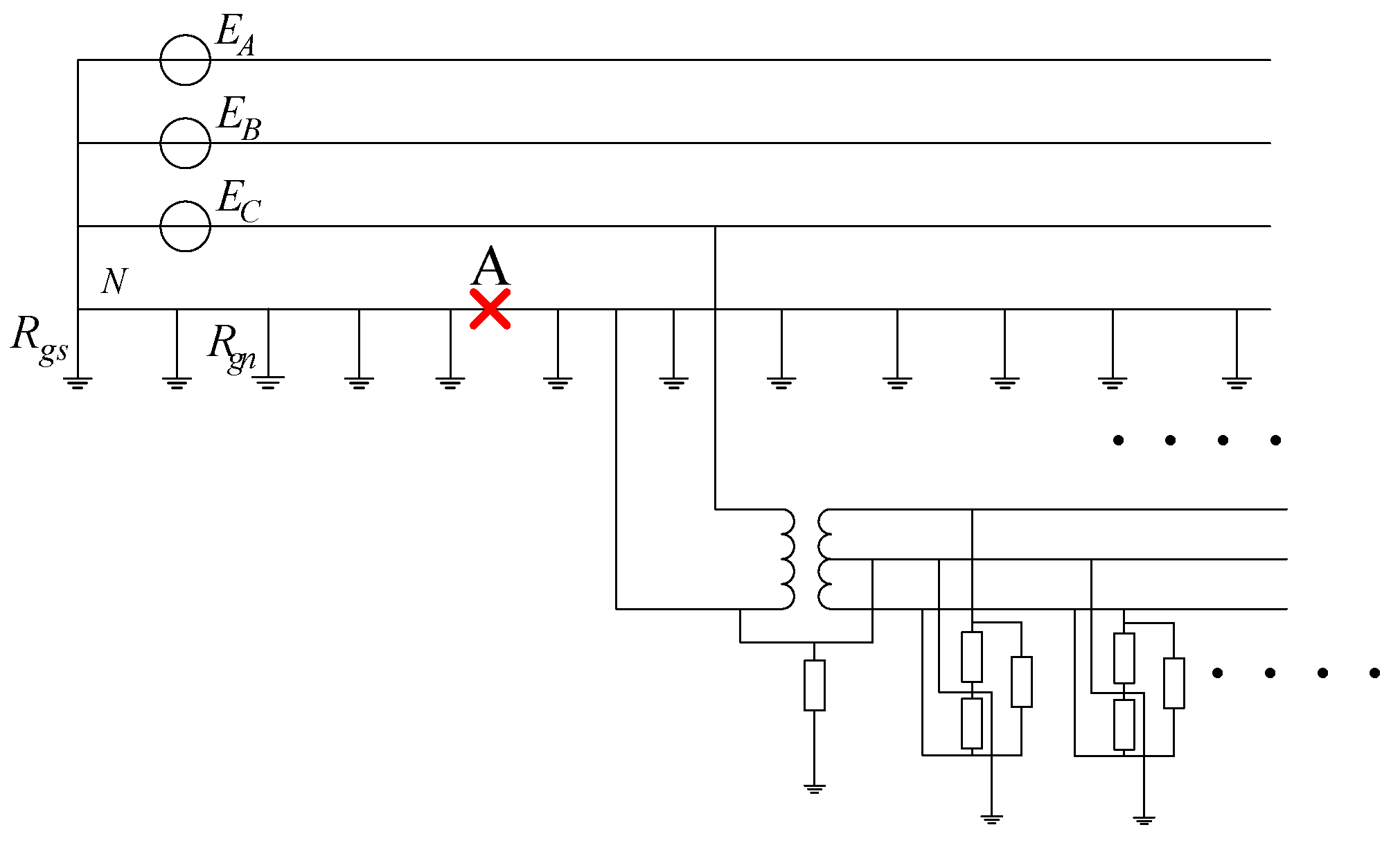
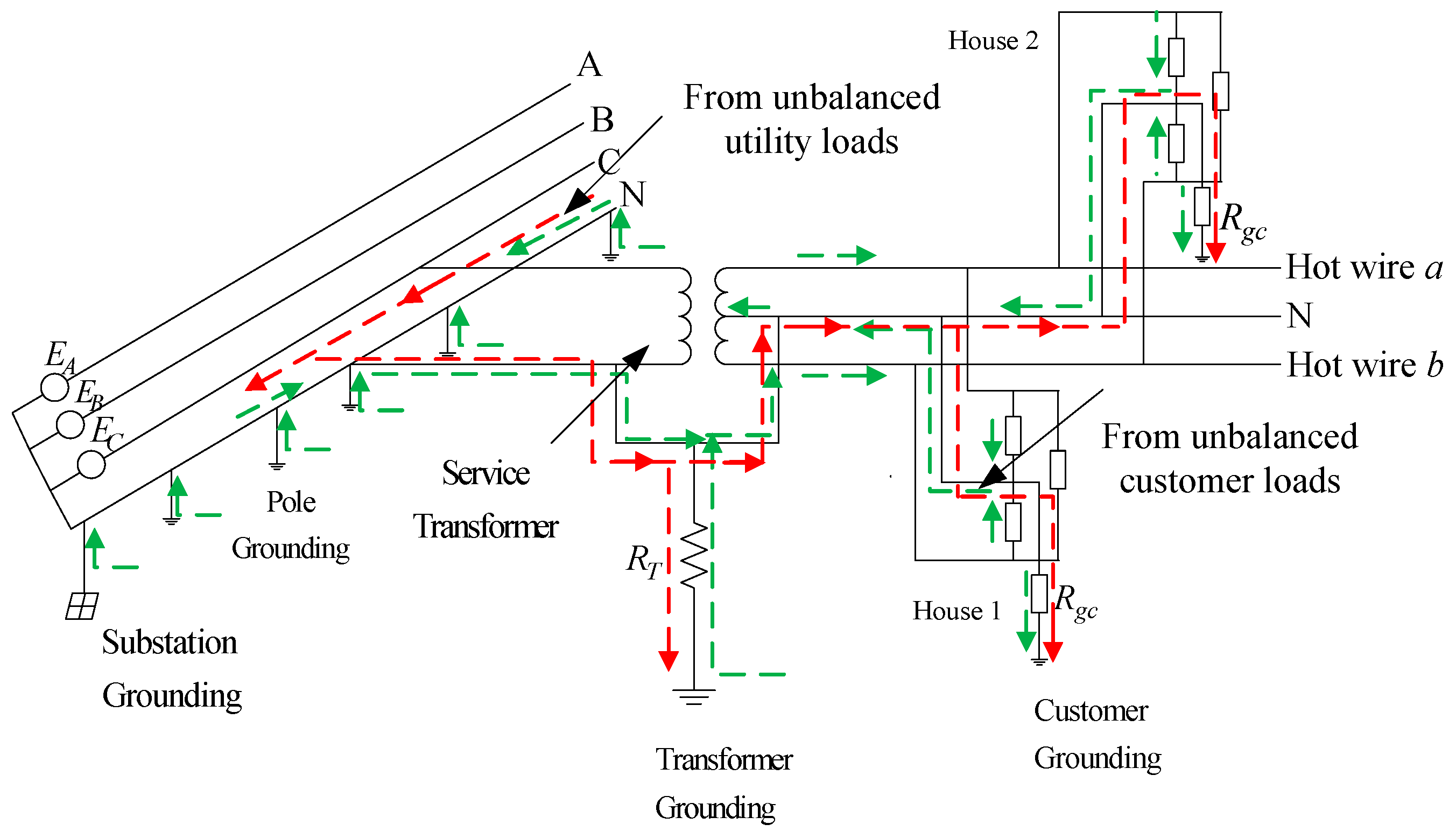
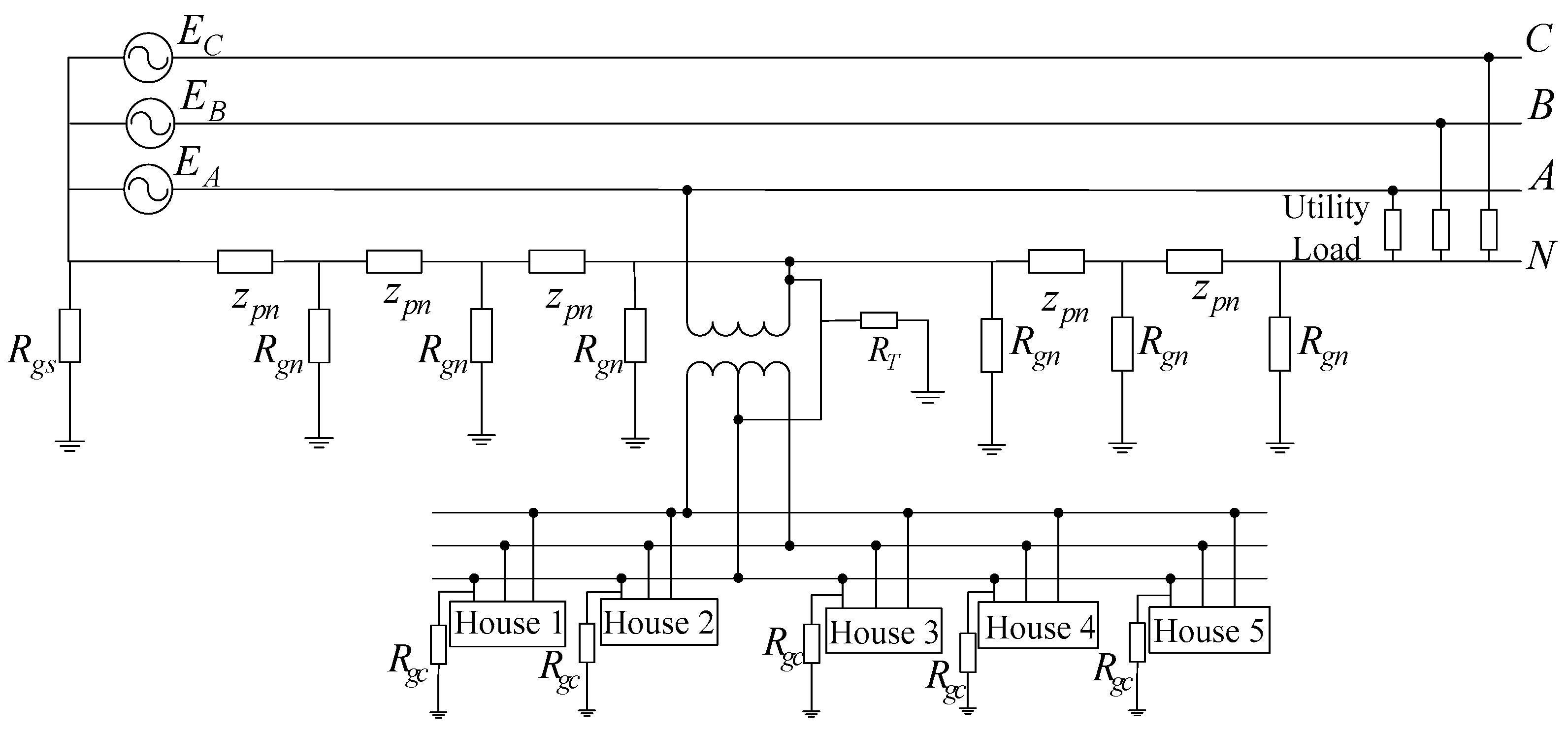
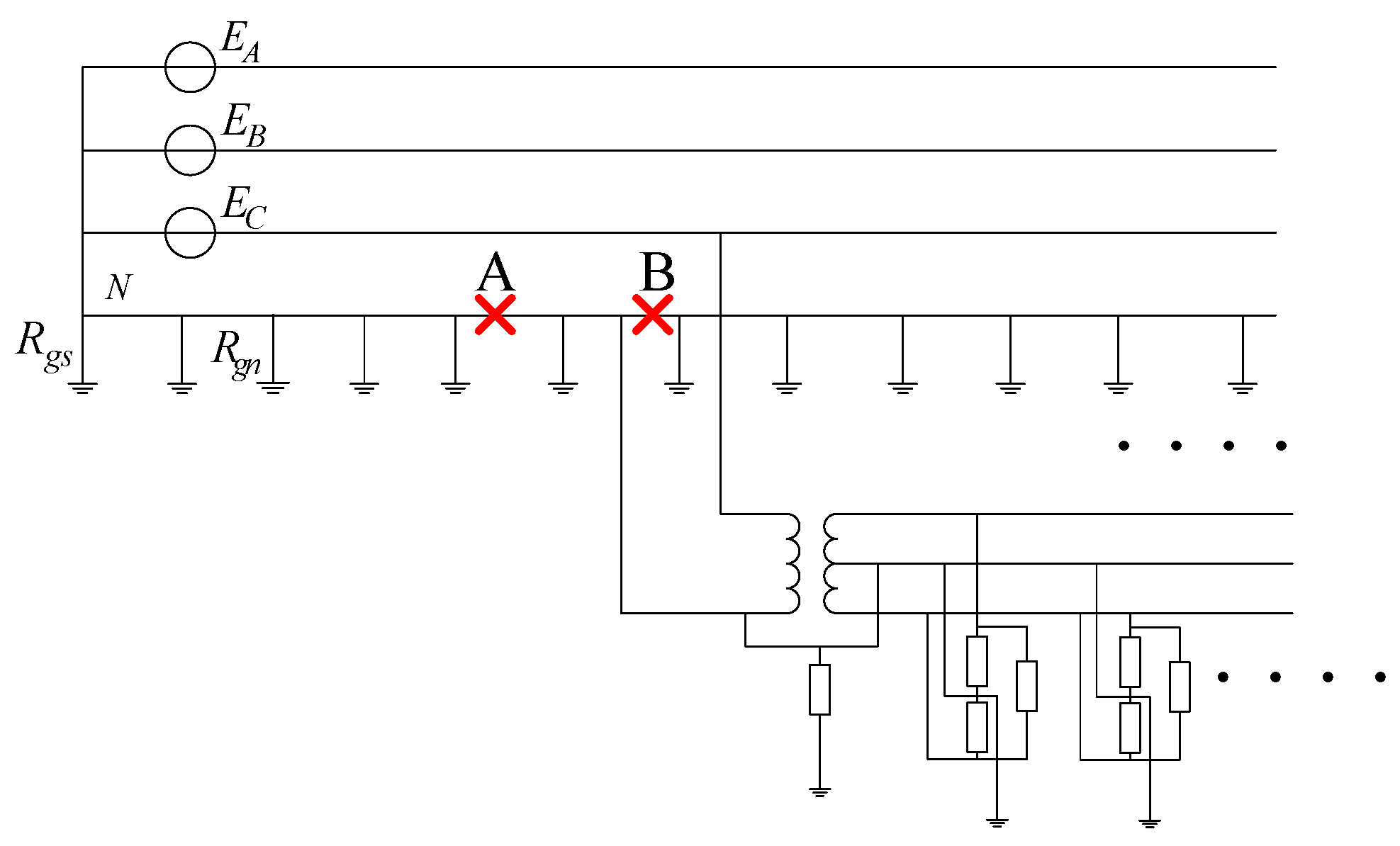
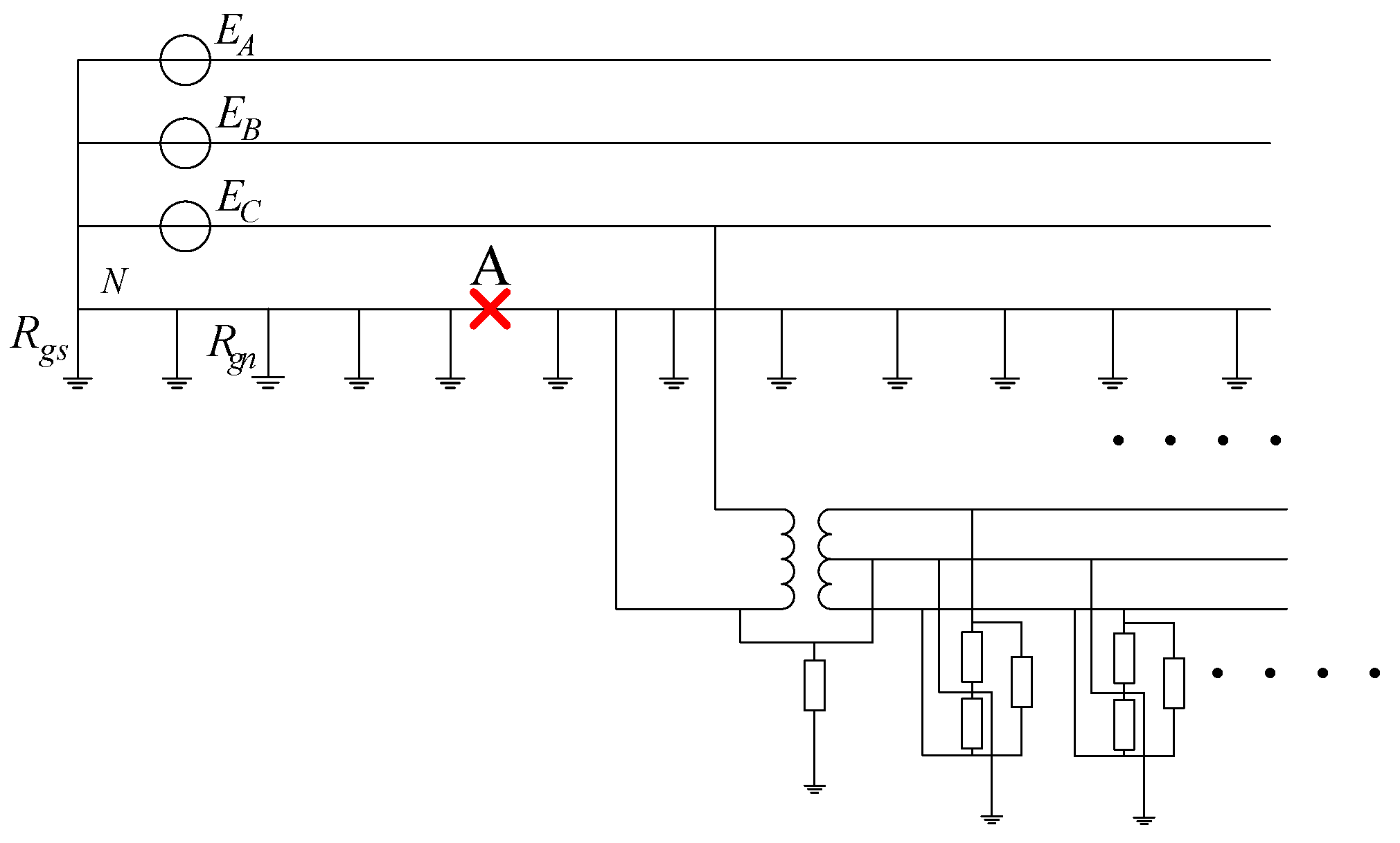
The single-line diagram of a typical three-phase four-wire system with multiple primary neutral groundings is shown in
Figure 1. The neutral line in the primary system is grounded at multiple electrodes along its route. For the North American power system, there are usually at least four grounds per 1.6 km [
17]. The primary neutral and secondary neutral are often tied at the service transformer grounding, as shown in
Figure 1. Here, for simplification, only one phase of the distribution transformer is depicted. The loads in the transformer secondary side are represented by customer houses. Generally, one service transformer supplies dozens or hundreds of individual houses depending on the community size. At the transformer secondary side, the neutral is grounded via the grounding resistance at the service panels of the customer. In
Figure 1,
RT represents the transformer grounding resistance, and
Rgc represents the customer grounding resistance. Under normal operating conditions, the current flowing in the neutral line of the MGN system is mainly caused from the unbalanced utility loads and customer loads, and the flow of current is shown in
Figure 1. In
Figure 1, the green line represents the unbalanced current caused by the unbalanced customer loads, and the red line represents the unbalanced current caused by the unbalanced utility loads.
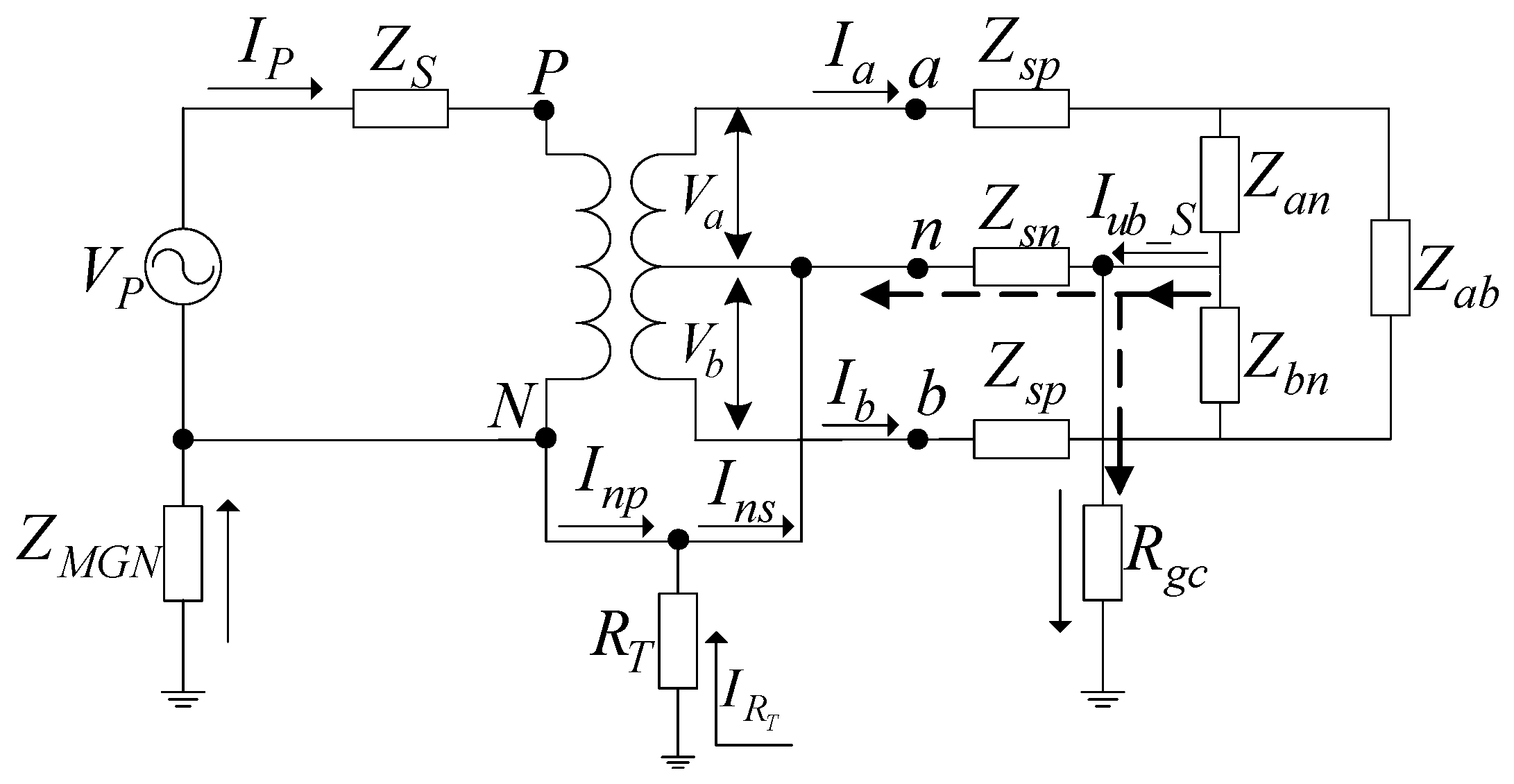
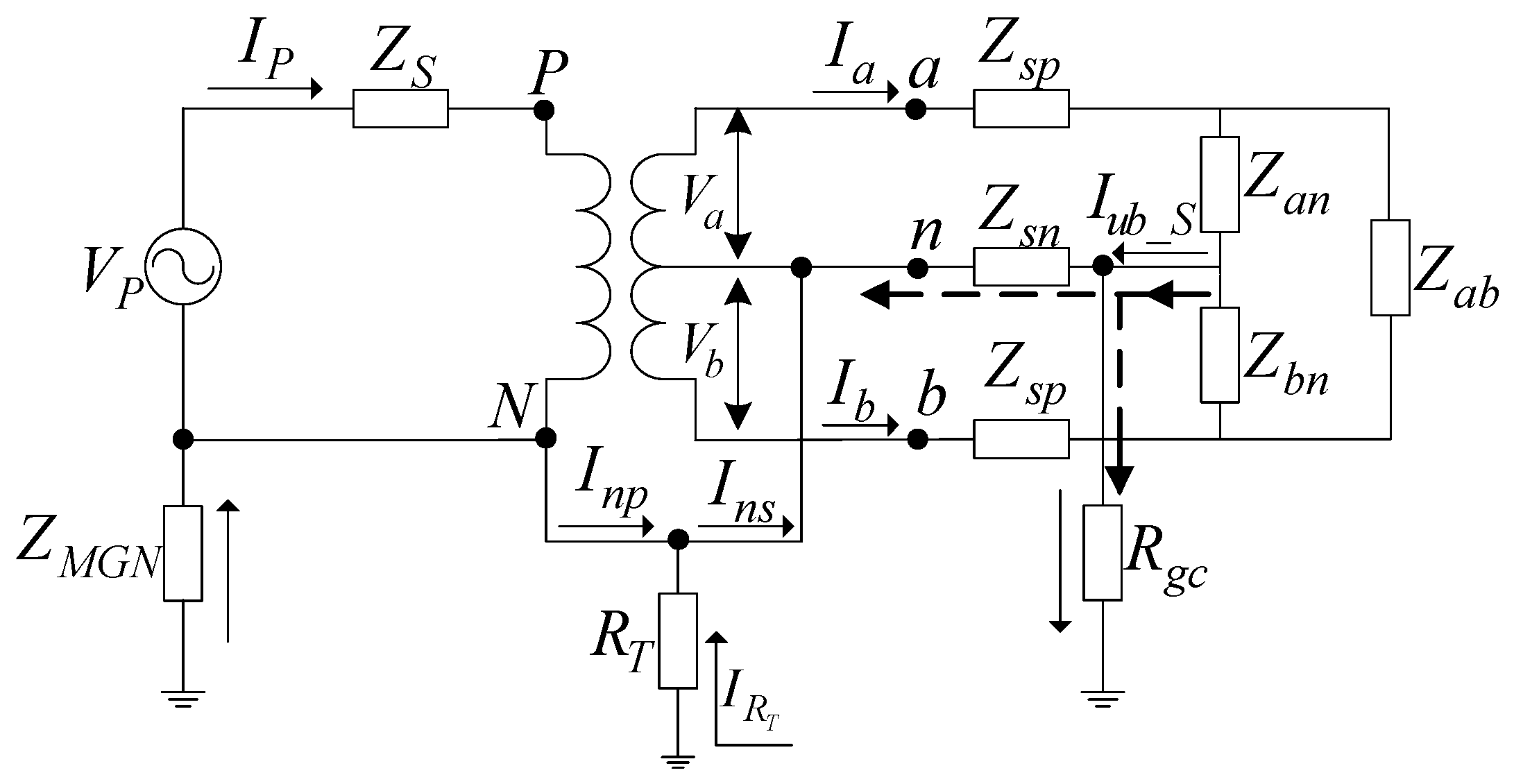
In order to analyze the neutral current at the transformer primary and secondary side, an equivalent circuit is first established, as shown in
Figure 2. The transformer primary system is equivalent to be a Thévenin circuit represented by
VP and
ZS, where
VP is the phase to neutral voltage and
ZS is the equivalent impedance for the primary system.
ZMGN represents the equivalent impedance of the primary multiple groundings. The derivation process for the value of
ZMGN will be discussed in the next subsection.
Zan represents the equivalent customer loads between the hot wire
a and neutral;
Zbn represents the equivalent customer loads between the hot wire
b and neutral;
Zab represents the equivalent customer loads between the hot wire
a and
b.
Zsn is the impedance of the neutral line in the transformer secondary side, and
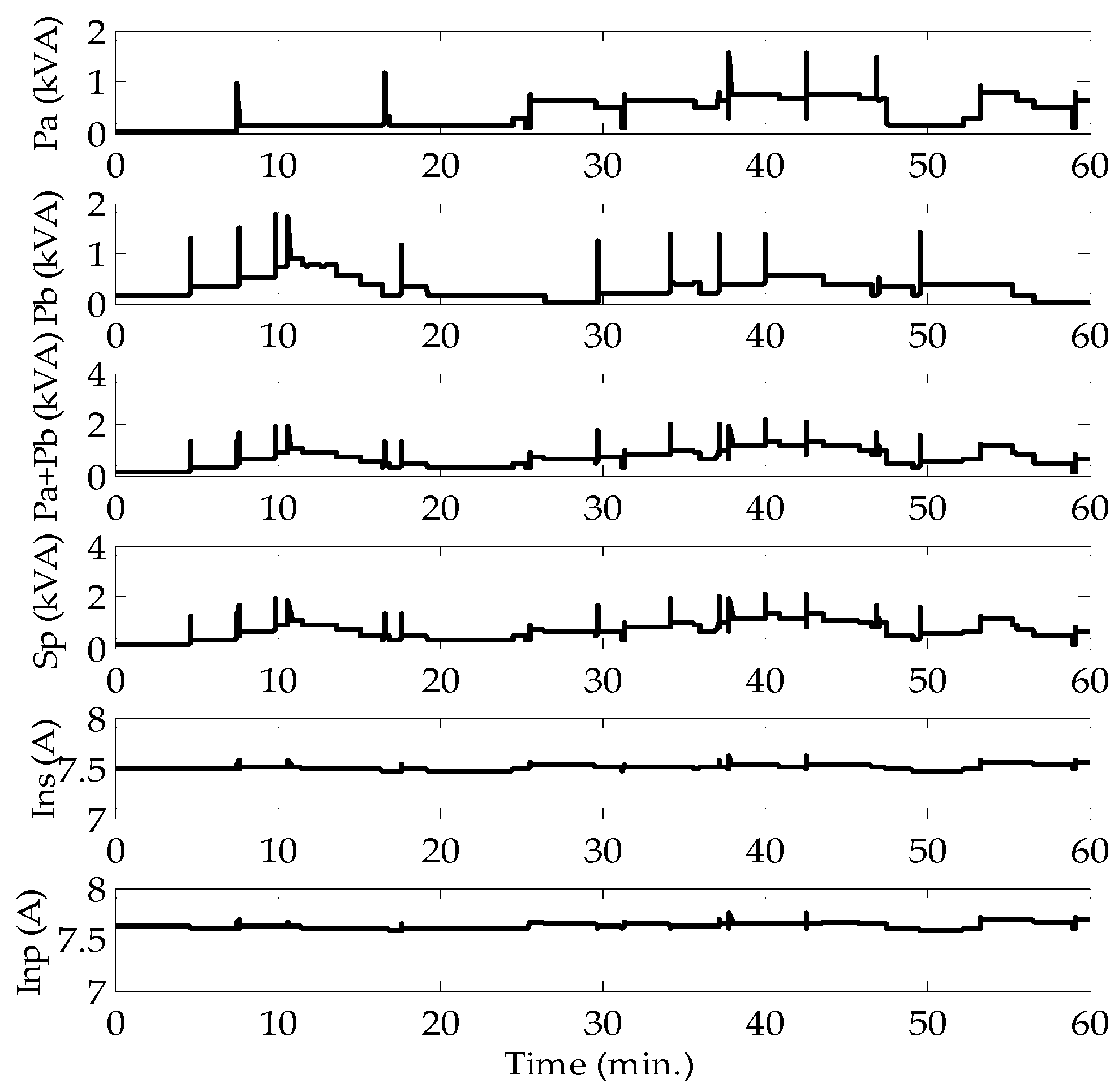
Zsp is the distribution line impedance. In
Figure 2, the current flowing in the primary neutral is labeled as
Inp, and the current flows in the secondary neutral are labeled as
Ins.
Ia,
Va and
Ib,
Vb represent the phase current and voltage of the secondary side.
IP represents the current in the transformer primary side, and
represents the grounding current of the transformer. The unbalanced current in the transformer secondary side is labeled as
Iub_S in
Figure 2.
Suppose that the neutral current is totally caused by the customer, and the utility has no contribution. According to
Figure 2, there are two circulation paths for this unbalanced current caused by the customer loads. One part of it flows through the secondary neutral line and then back to the customer loads. The other part flows into the ground through the customer grounding
Rgc and then flows from the earth to the transformer grounding
RT and primary grounding
ZMGN. This neutral current further circulates back to the transformer secondary neutral.
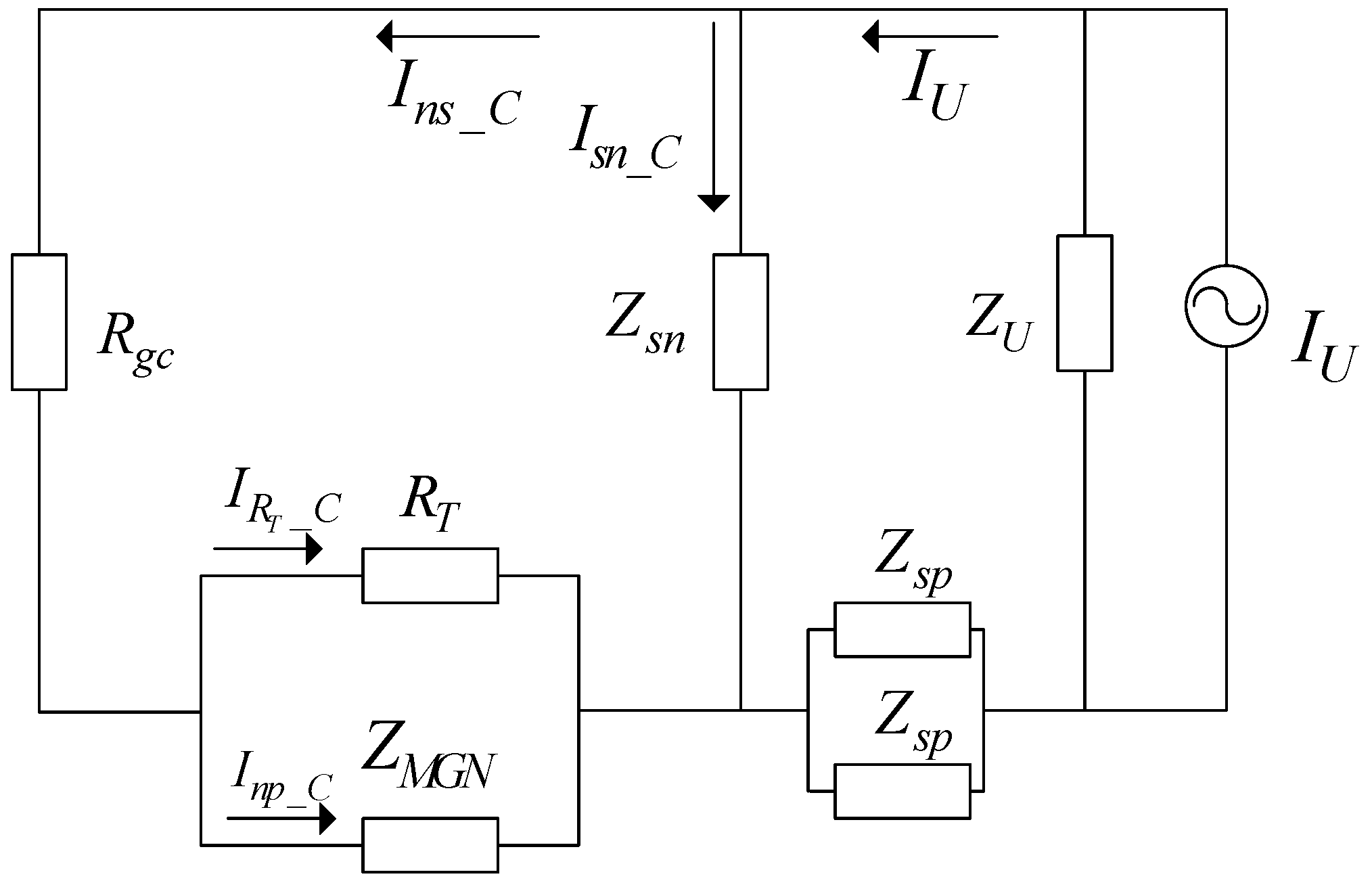
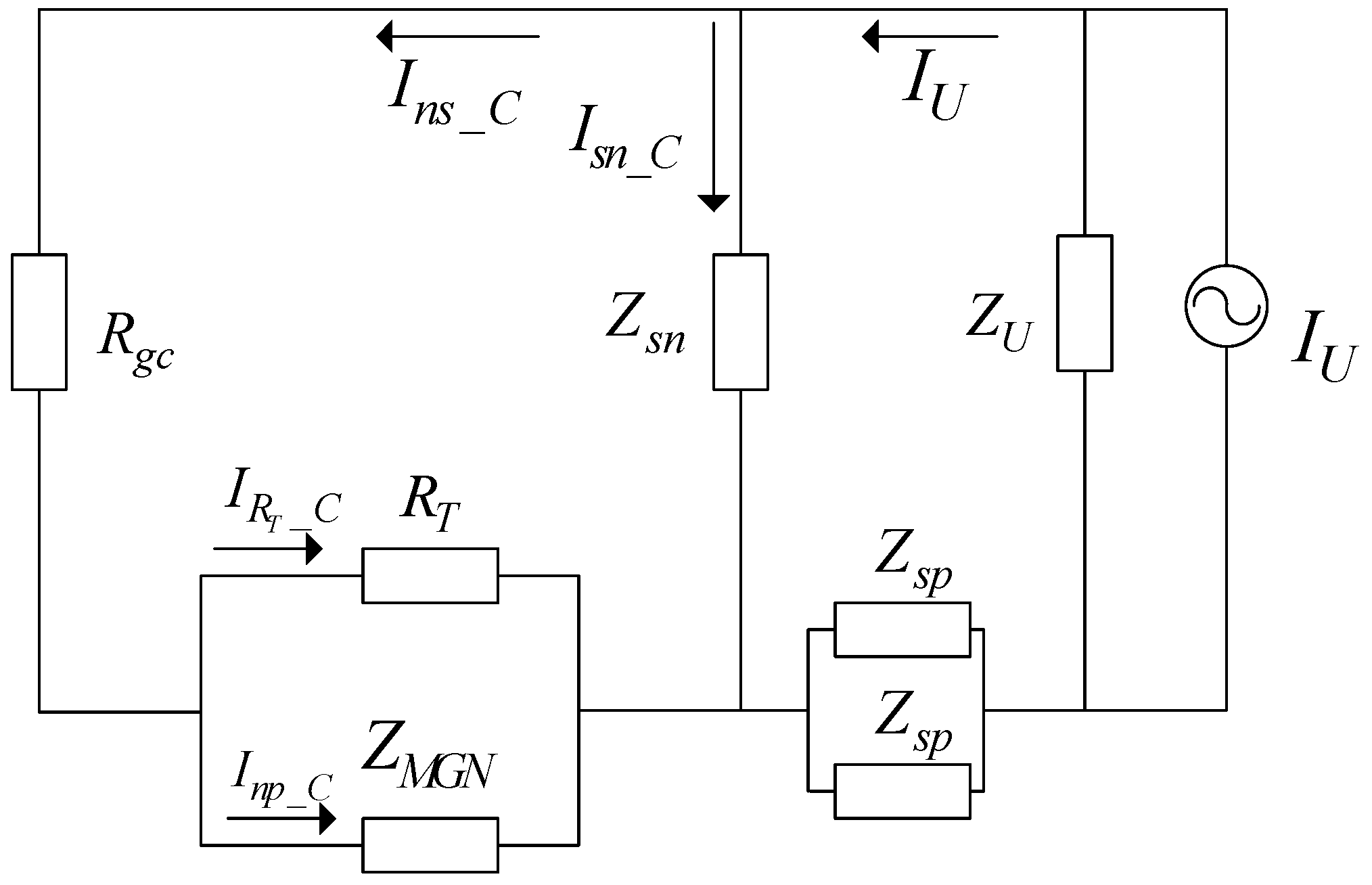
According to the above descriptions, the equivalent circuit for the neutral current circulation can be simplified as shown in
Figure 3. In the figure, the current source
IU is determined by the unbalanced voltage
VU and the equivalent load impedance
ZU, which is caused by the imbalance of the two single-phase loads (
Zan and
Zbn). The analytical formulas to calculate
ZU and
IU are given in Equations (1) and (2).
VU is the equivalent unbalanced voltage source, which can be calculated based on the transformer secondary rated voltage
VN.
In
Figure 3,
Isn_C represents the current flowing through the secondary neutral line, and
Ins_C represents the current flowing into the ground through the customer grounding impedance
Rgc. The current
Ins_C is split into two parts as
IRT_C and
Inp_C. The subscript
C in each variable represents that the neutral currents are caused only by the customer. Based on
Figure 3, it can be seen that the current flowing in the neutral of the primary system
Inp_C can be calculated by Equation (4).
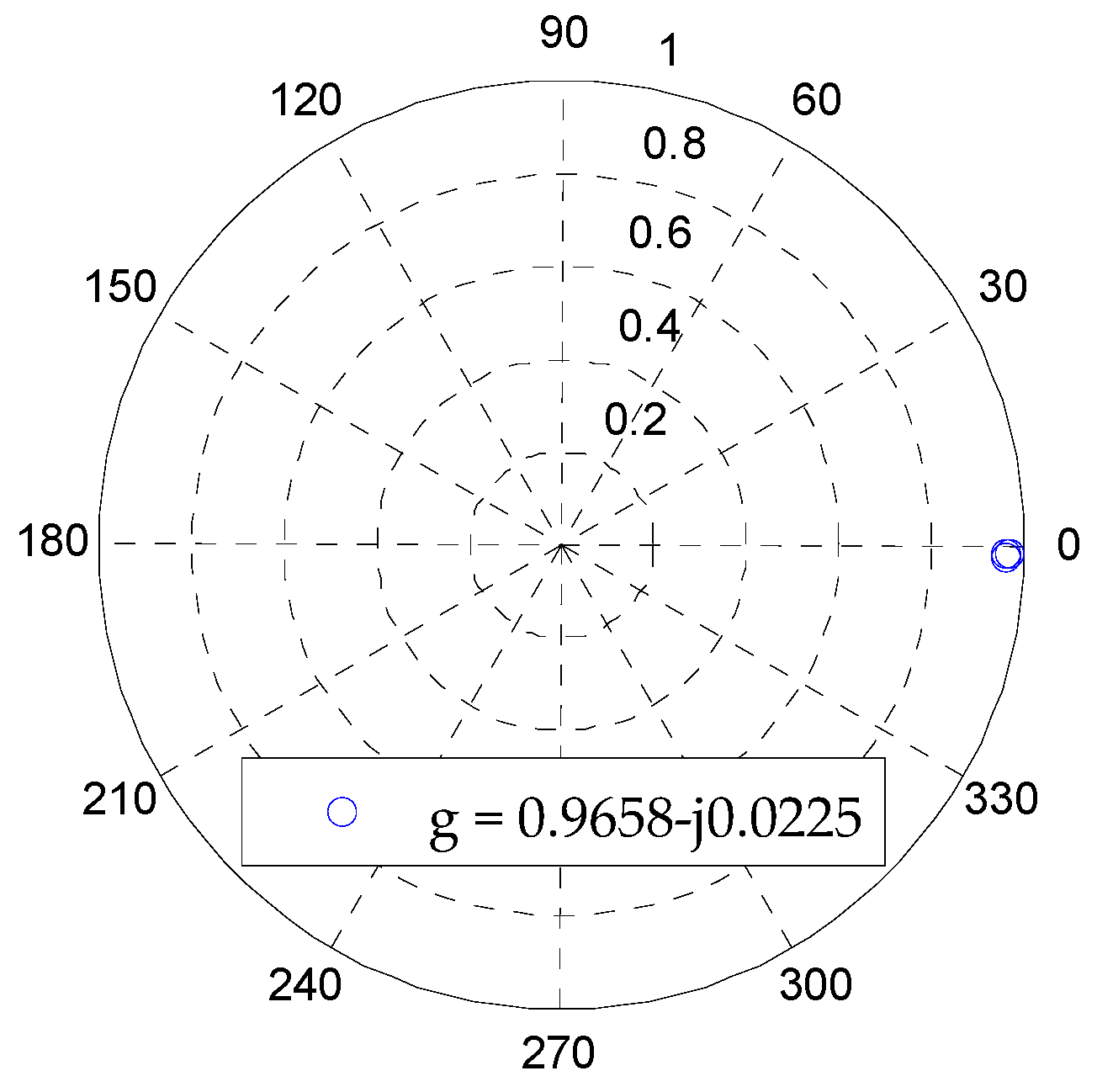
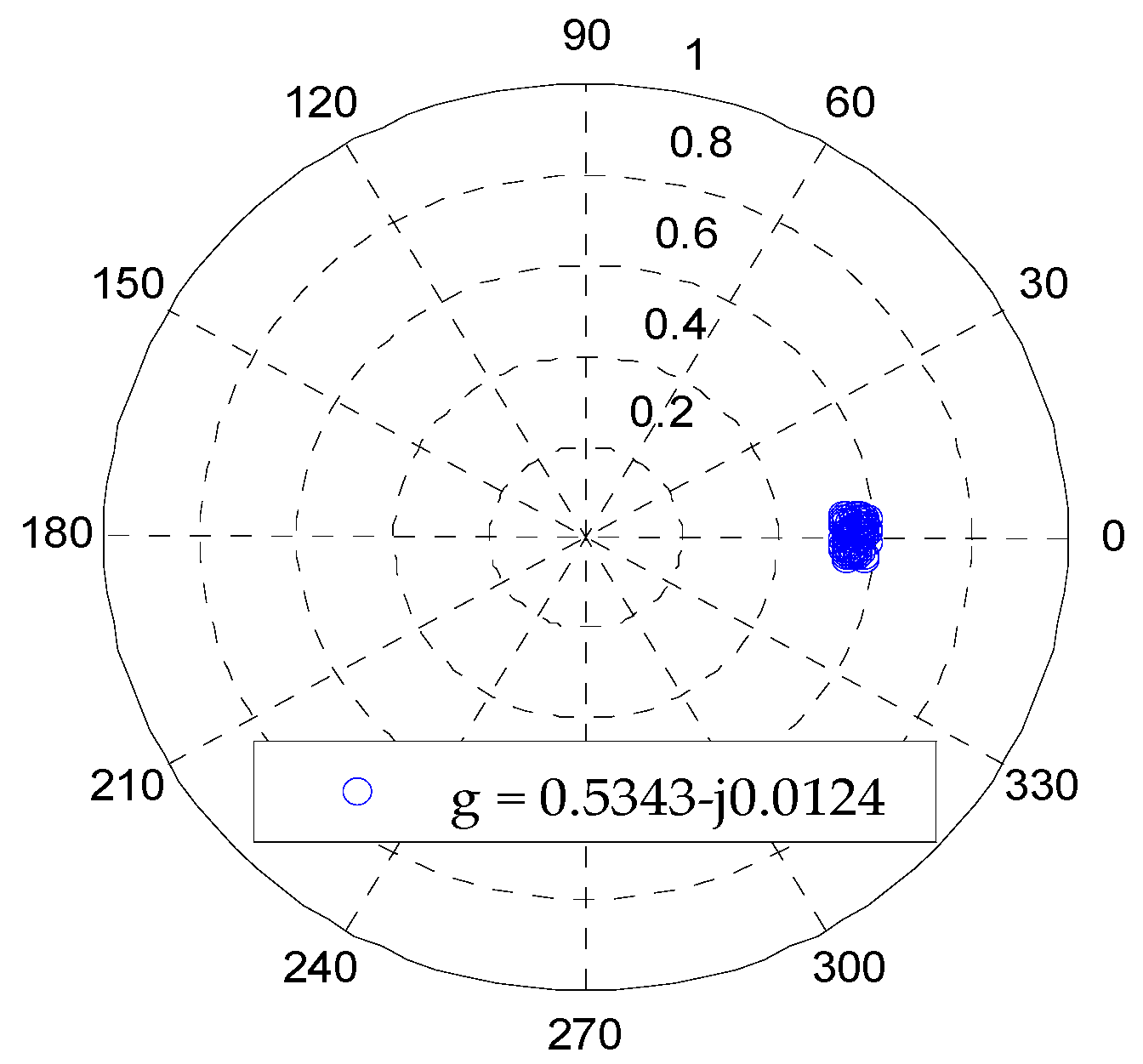
Here, a parameter
g is introduced, which is shown in Equation (5).
It can be seen that the value of parameter g is determined by the transformer grounding impedance RT and the primary neutral equivalent impedance ZMGN. For an MGN system, the transformer grounding resistance RT is usually constant. Therefore, the value of g is mainly determined by the equivalent neutral impedance ZMGN of the primary system. If the primary system neutral is broken, the equivalent impedance ZMGN should increase, and the value of parameter g should decrease. Therefore, the variation for the value of parameter g can be used to reflect the primary neutral condition.
2.2. Impedance Determination under Normal Operating Conditions
Under normal operating conditions, the value of transformer grounding impedance RT can be estimated based on the substation database. The value of impedance ZMGN can be determined based on the following procedures.
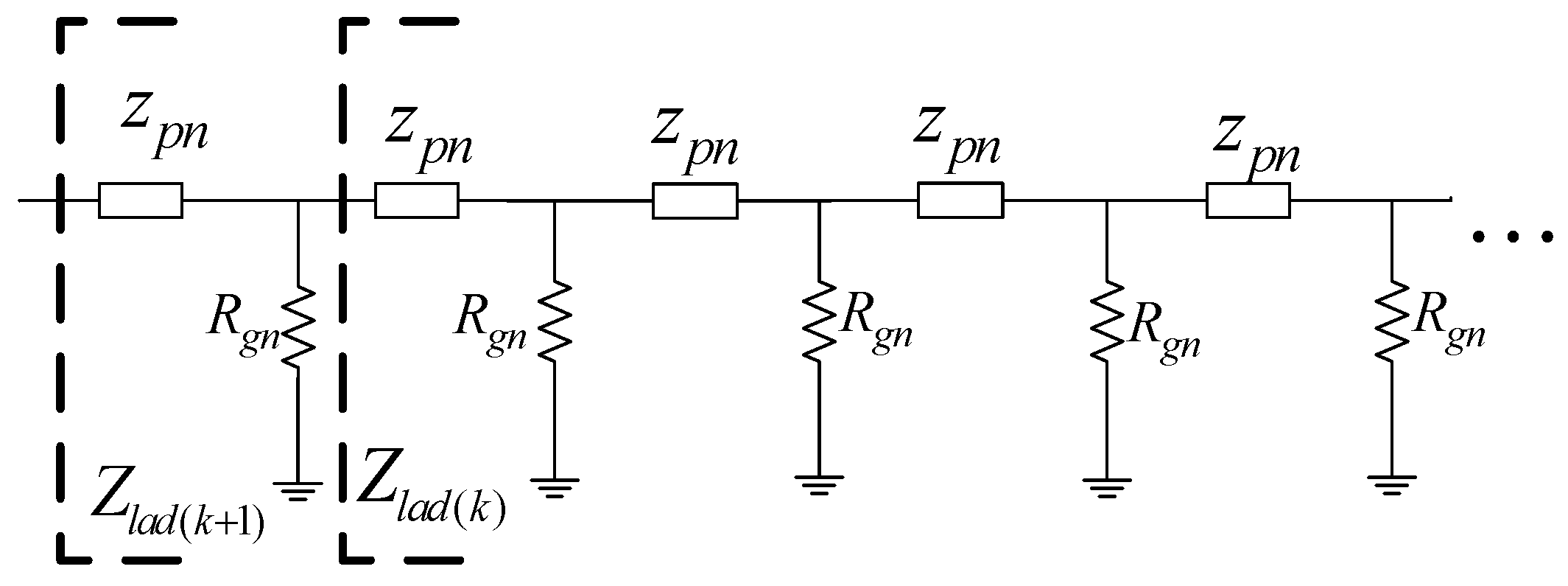
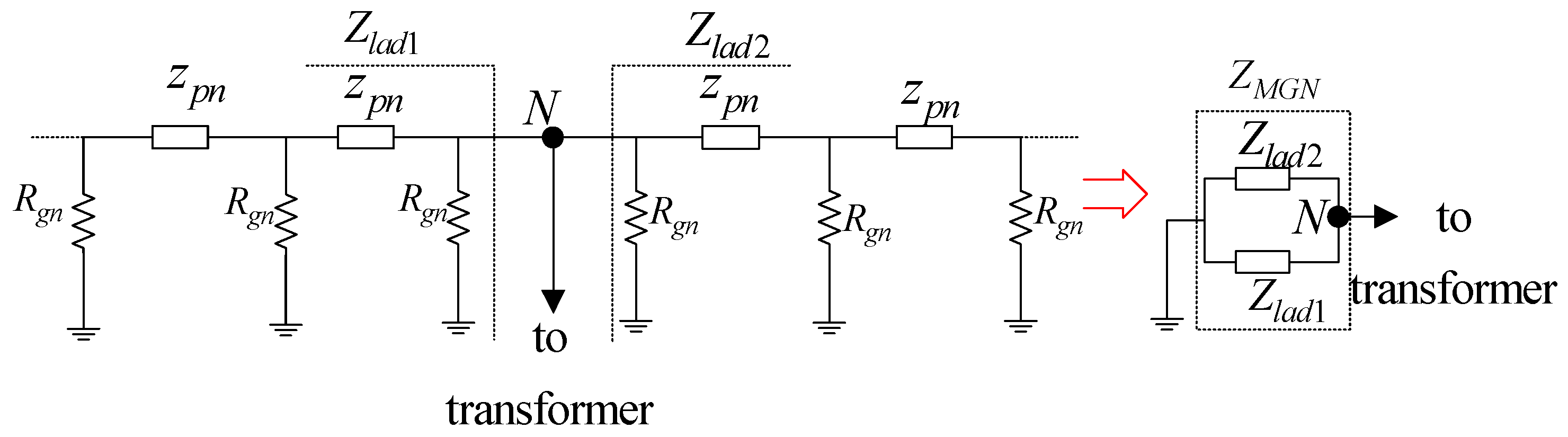
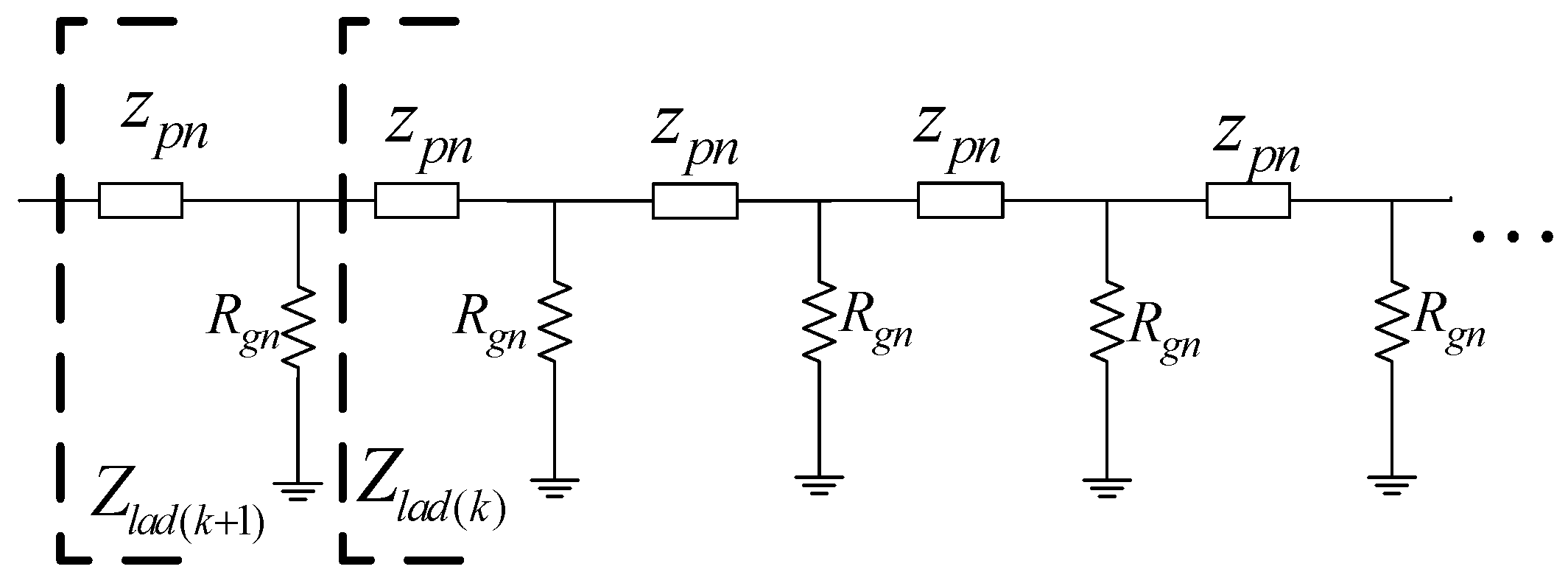
The primary neutral line of an MGN system is naturally a ladder network, as shown in
Figure 4, where
zpn is the primary neutral conductor impedance between two grounding poles.
Rgn represents the pole grounding resistance.
Zlad(k) and
Zlad(k+1) represent the equivalent impedance for the multiple grounding system with
k or (
k + 1) grounding poles, respectively. The equivalent impedance of a ladder network with (
k + 1) grounding poles can be calculated according to Equation (6) [
18].
For the ladder network shown in
Figure 4, a ladder network has the property that after certain more parallel networks are added, the change in the equivalent impedance becomes insignificant; therefore, when the number
k is sufficiently large,
Zlad(k) ≈
Zlad(k+1).
Then, Equation (6) can be expressed as Equation (7).
After certain rearrangement of Equation (7), Equation (8) can be obtained:
The subscript (
k) is omitted for simplicity in Equation (8). The positive root of
Zlad is the equivalent impedance of the ladder network; thus, Equation (9) is derived.
Since the neutral conductor impedance
is much smaller than
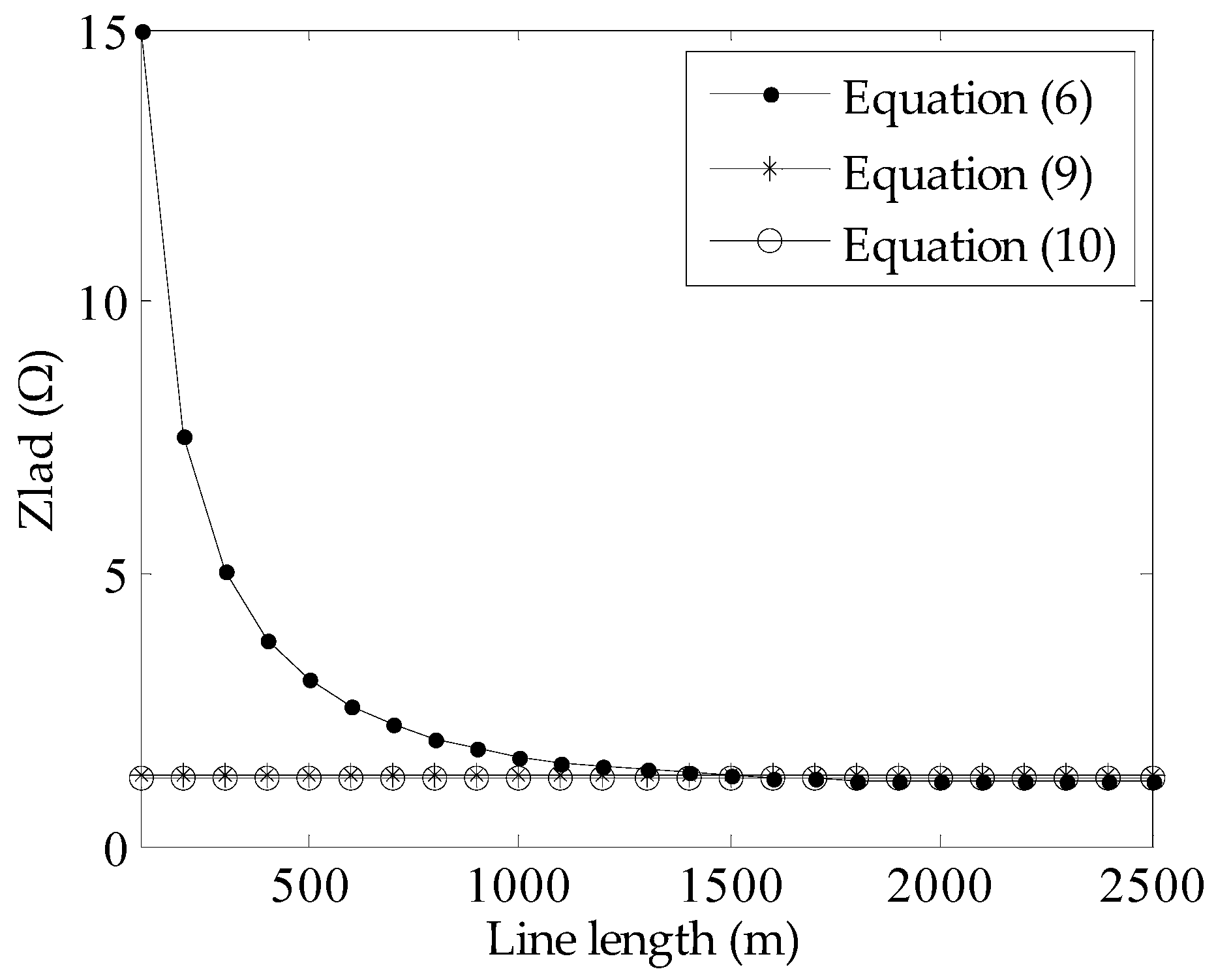
, Equation (9) can be simplified to Equation (10).
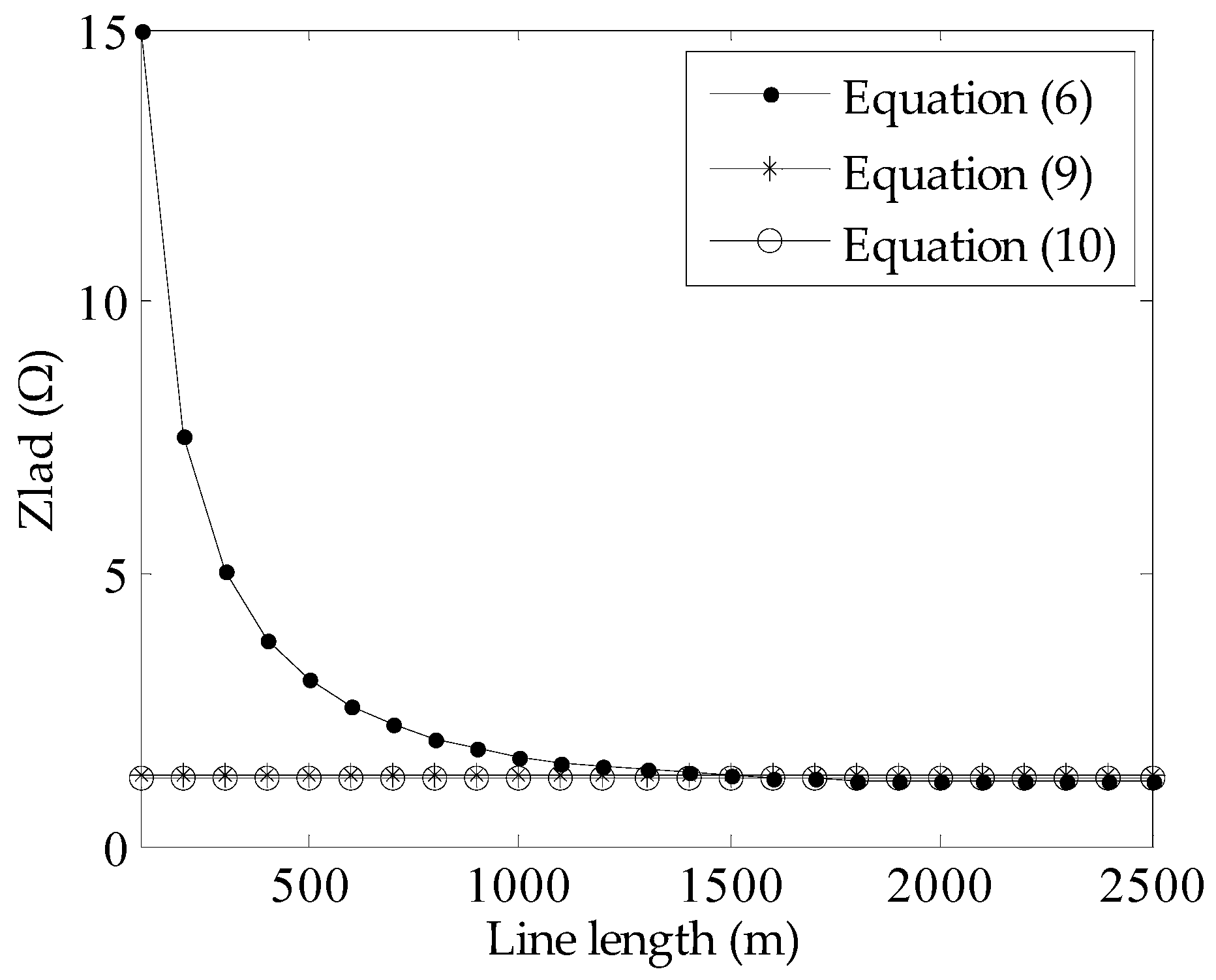
The impedance calculation result based on Equation (10) is compared with the results from Equations (6) and (9) for an example system. The parameters for the MGN system are:
and
. The estimation results for the equivalent impedance of the ladder network are shown in
Figure 5. It is apparent that the equivalent impedance of the ladder network reaches a constant value when the length of the ladder network is larger than 1000 m.
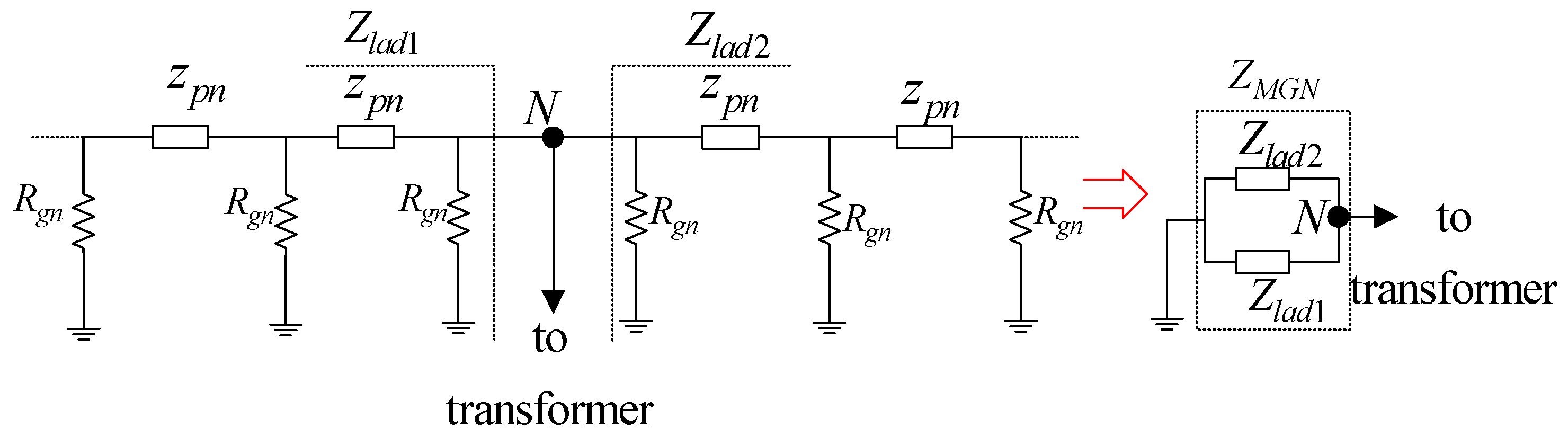
The neutral system seen from the transformer primary node
N (referring to
Figure 2) can be equivalent to the circuit shown in
Figure 6. It can be seen that, from the transformer connection point
N, the multi-grounding primary system can be seen as two parallel ladder networks, labeled as
Zlad1 and
Zlad2. The equivalent impedance of each network can be estimated by Equation (10). Additionally, the equivalent primary system impedance seen from the transformer connection point can be calculated by the parallel connection of
Zlad1 and
Zlad2 according to the analytical formula shown in Equation (11).
2.3. Impedance Determination Based on the Measurement Data
Referring to the multi-grounding system shown in
Figure 2, the neutral current in the primary system is caused simultaneously by both the utility and customer; therefore, the primary neutral current
Inp can be divided into two parts, as shown in Equation (12).
Inp_U is the primary neutral current caused by the utility, and
Inp_C is the primary neutral current caused by the customer. Similarly, the neutral current in the secondary system
Ins is also composed of two parts,
Ins_U and
Ins_C.
Bring Equations (4) and (5) into Equations (12) and (13), the following relation can be derived.
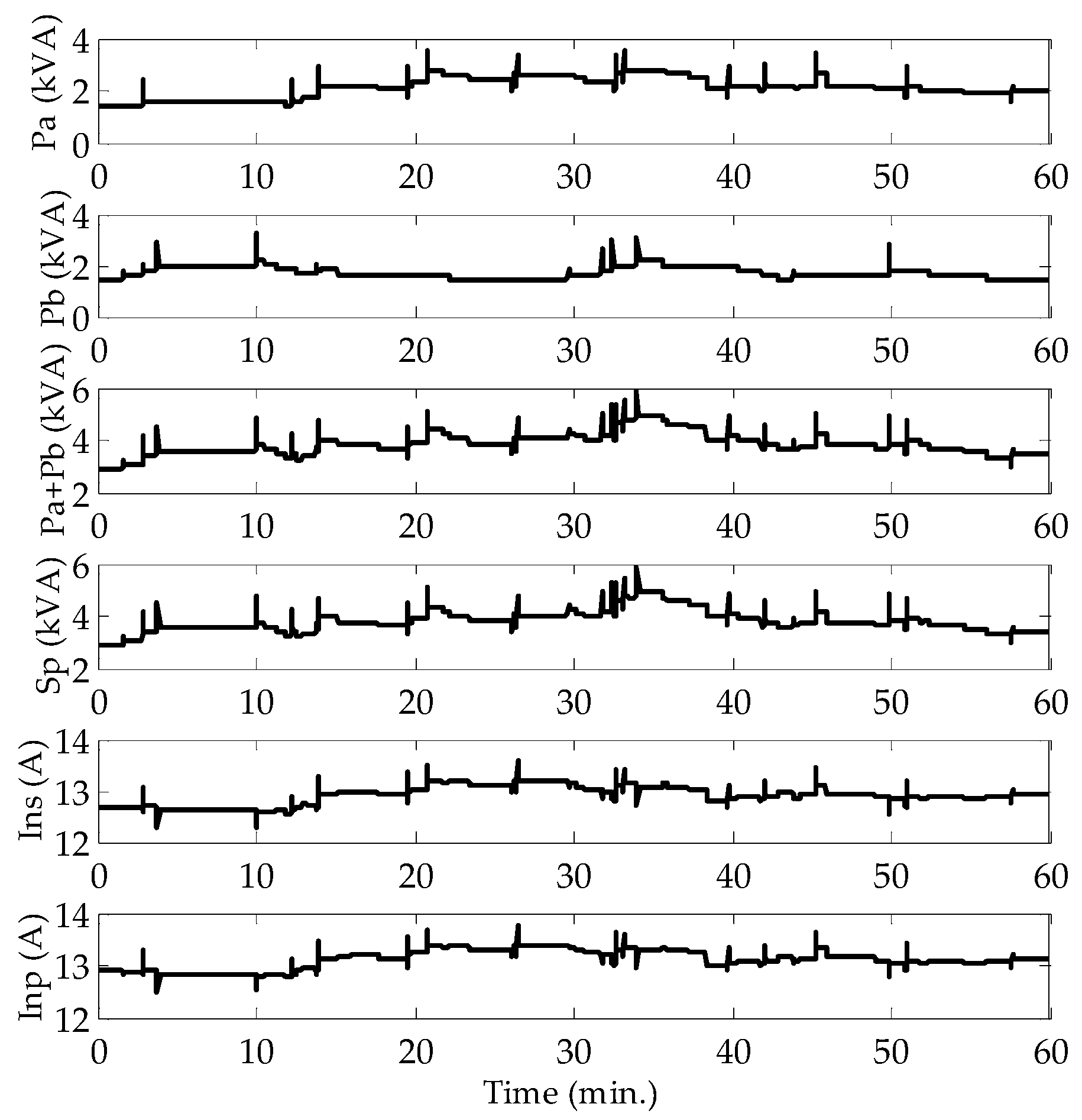
Based on the measurement data of two consecutive time instants
t1 and
t2, Equation (14) can be rewritten as Equations (15) and (16).
Subscripts 1 and 2 indicate that the data are for time instants
t1 and
t2, respectively. Subtracting Equation (15) from Equation (16), then Equation (17) can be obtained.
Here, Δ is used to indicate the difference between the values of each variable at different time instants. From Equation (17), it can be seen that, if the utility causes no variation to the neutral current, Δ
Inp_U and Δ
Ins_U will both equal zero. Equation (17) can be further simplified to Equation (18); therefore, parameter
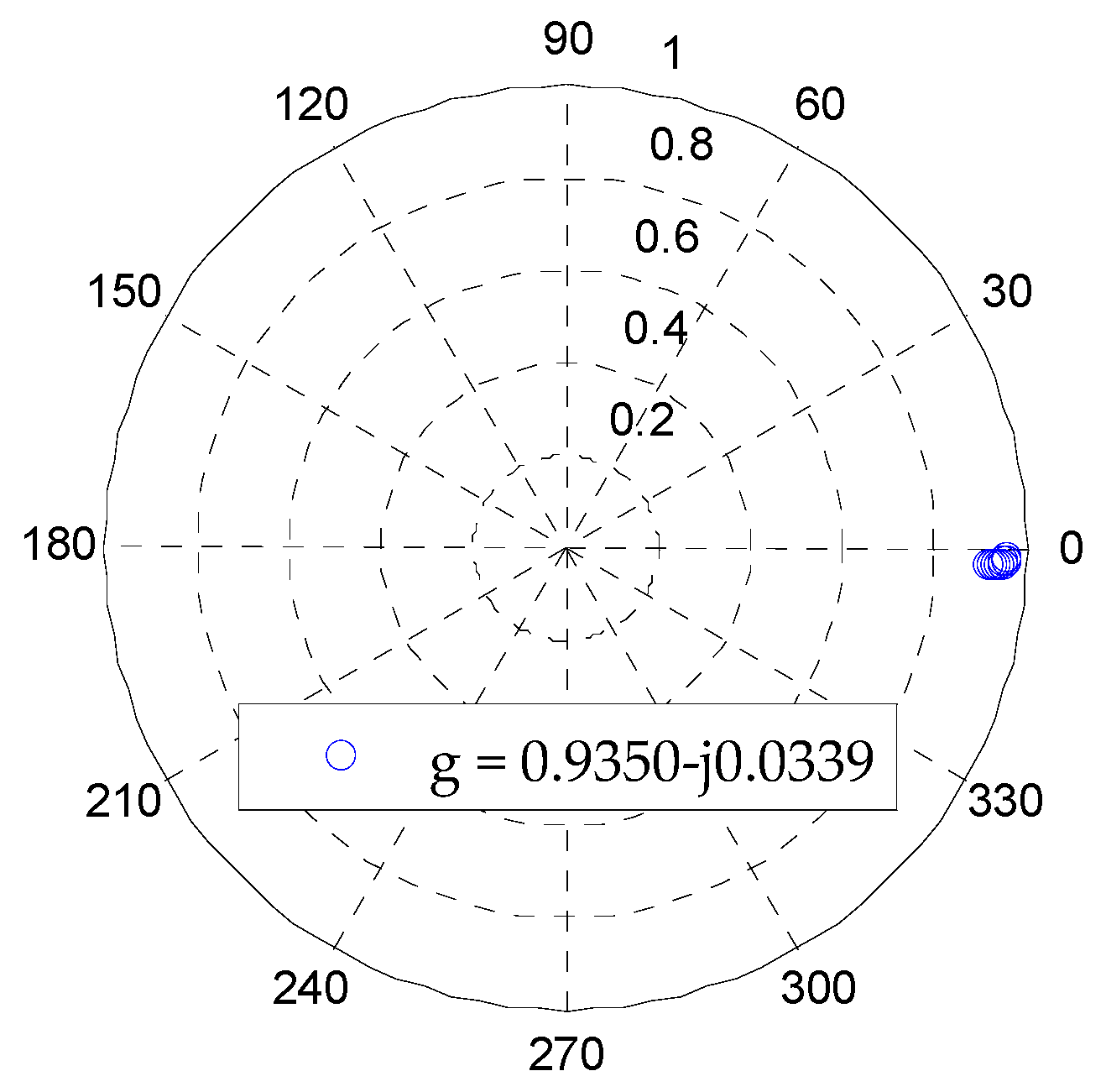
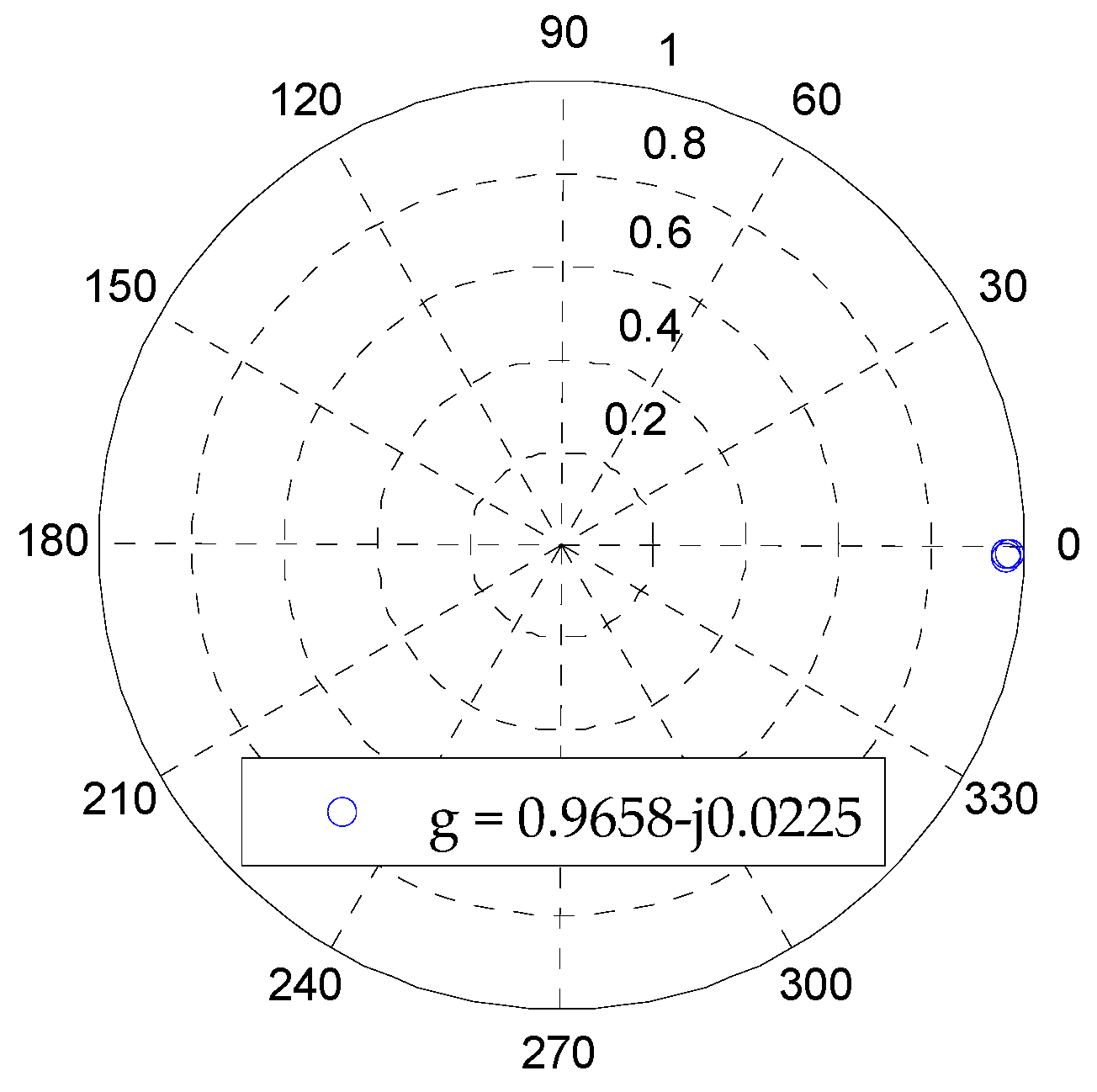
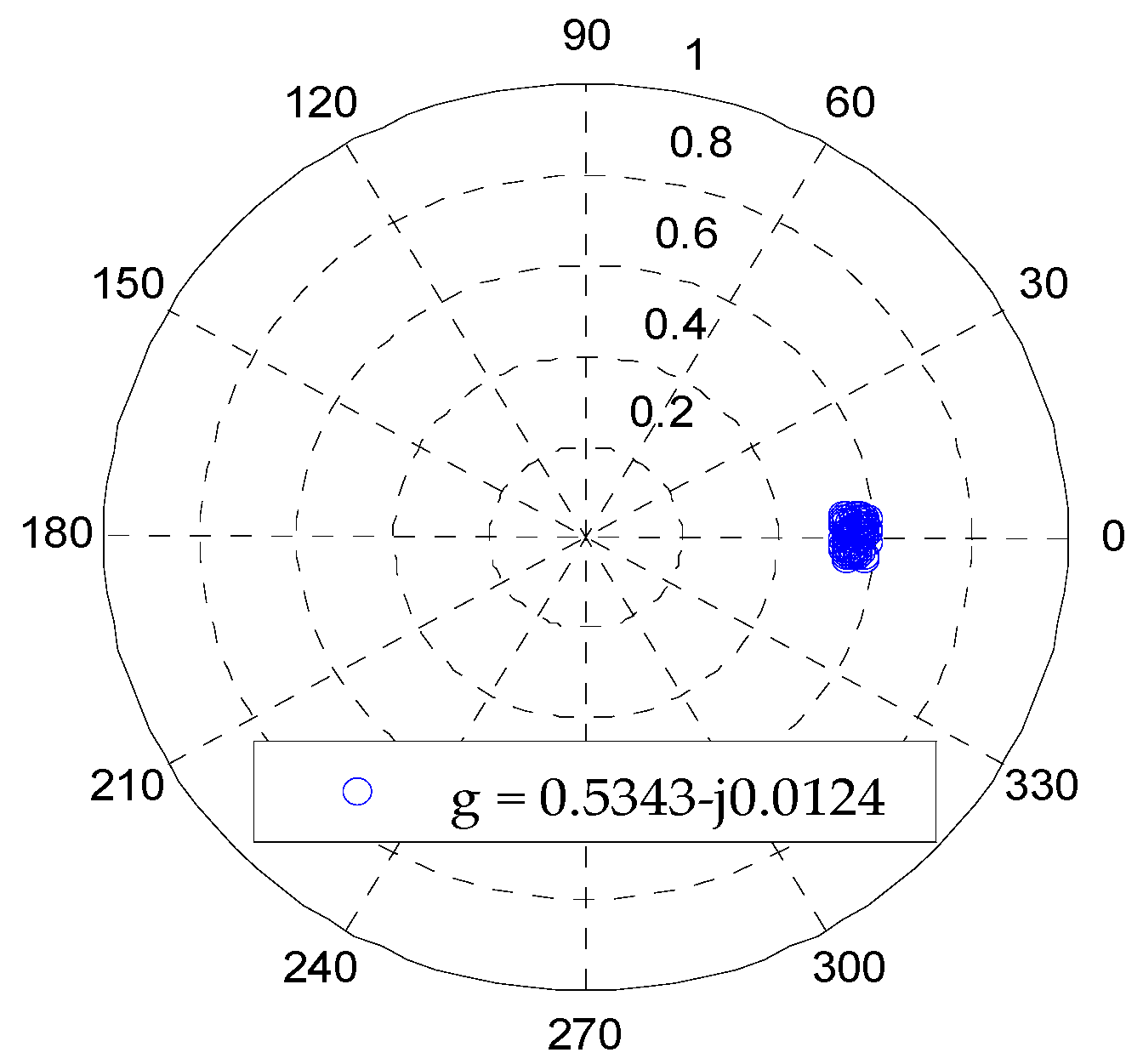
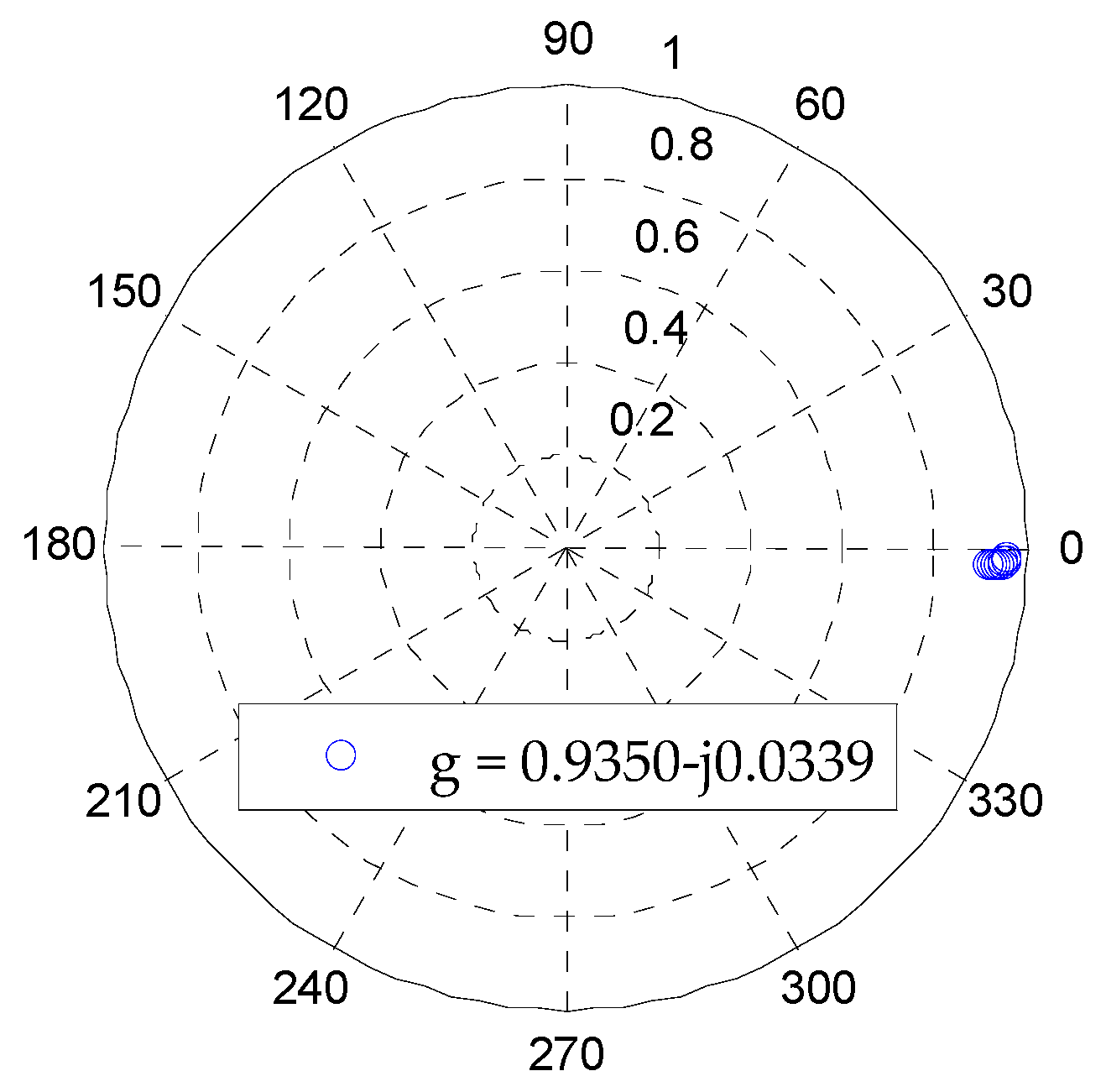
g can be calculated by Equation (19).
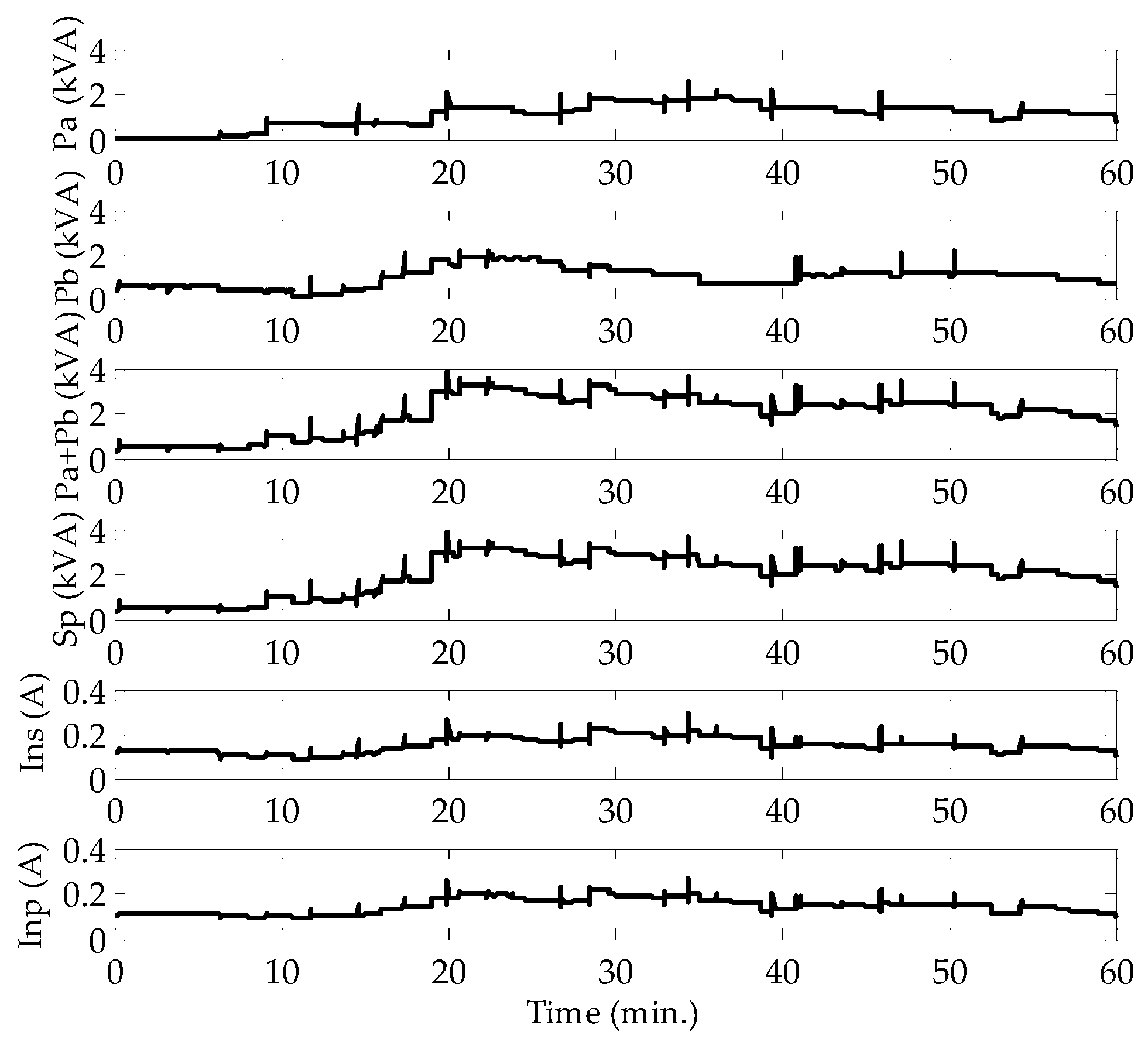
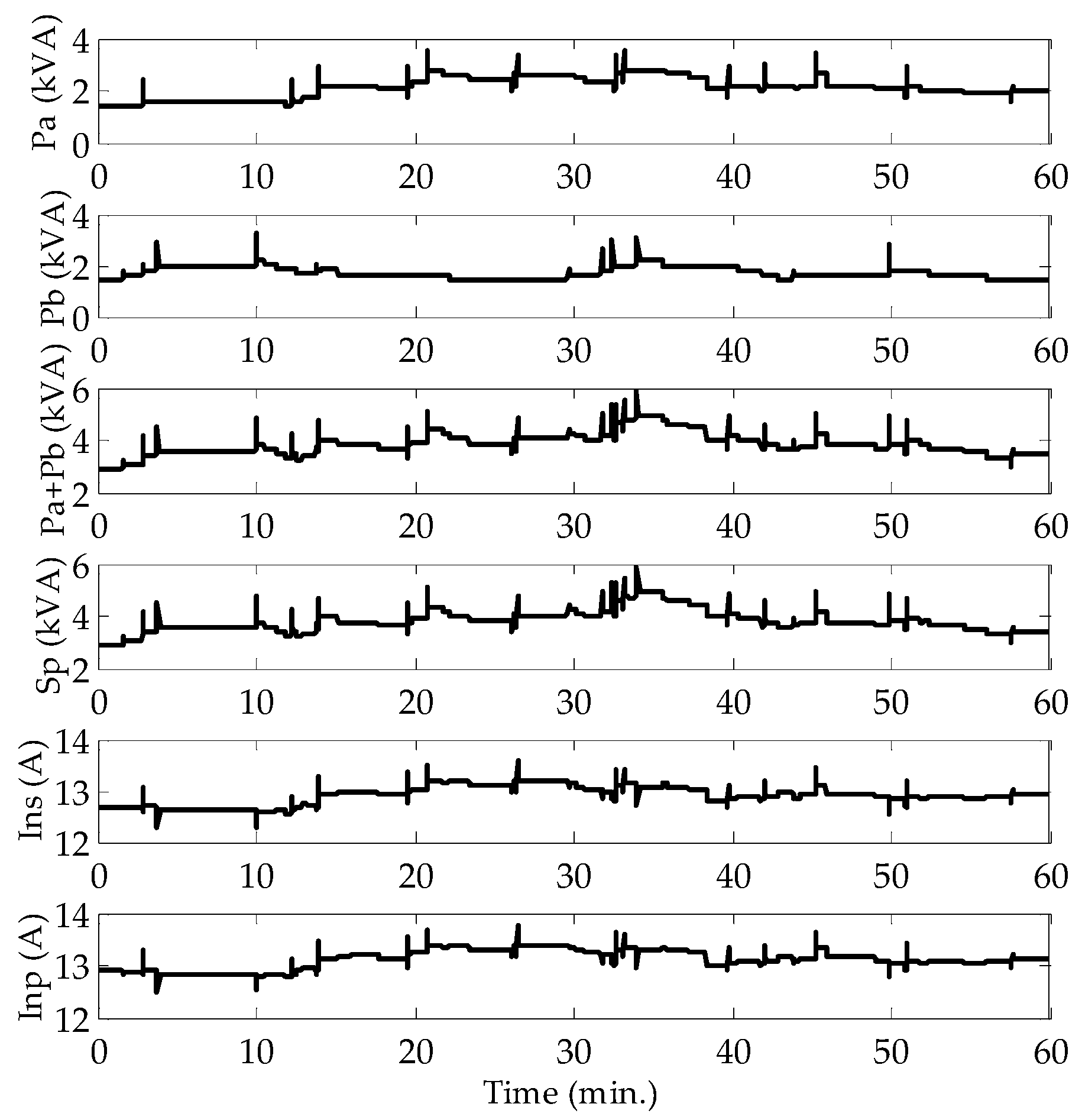
Therefore, the variation of
Inp and
Ins can be used to estimate the value of parameter
g. Furthermore, based on the estimated parameter
g, the primary neutral impedance
ZMGN can be estimated from Equation (20) according to Equation (5).
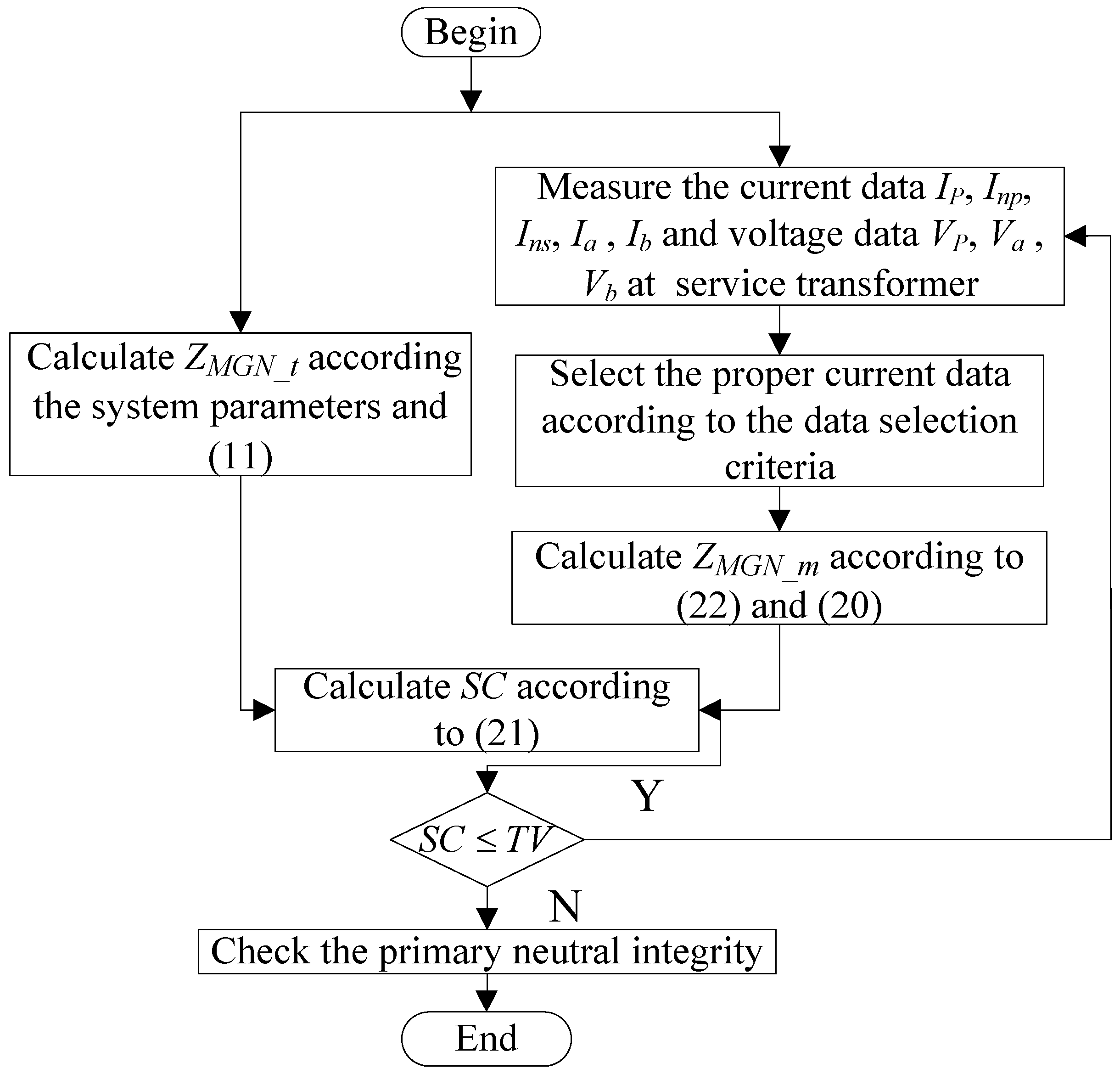
2.4. Determination of the Primary Neutral Condition
Under normal operating conditions, the equivalent impedance
ZMGN of the primary neutral system can be calculated according to Equation (11). The actual value of
ZMGN can be estimated based on the procedures shown in
Section 2.3. When the primary neutral line is loosened or broken, the equivalent impedance of the primary neutral conductor
ZMGN should increase. Therefore, by monitoring the value of
ZMGN, the condition of the primary neutral integrity can be known.
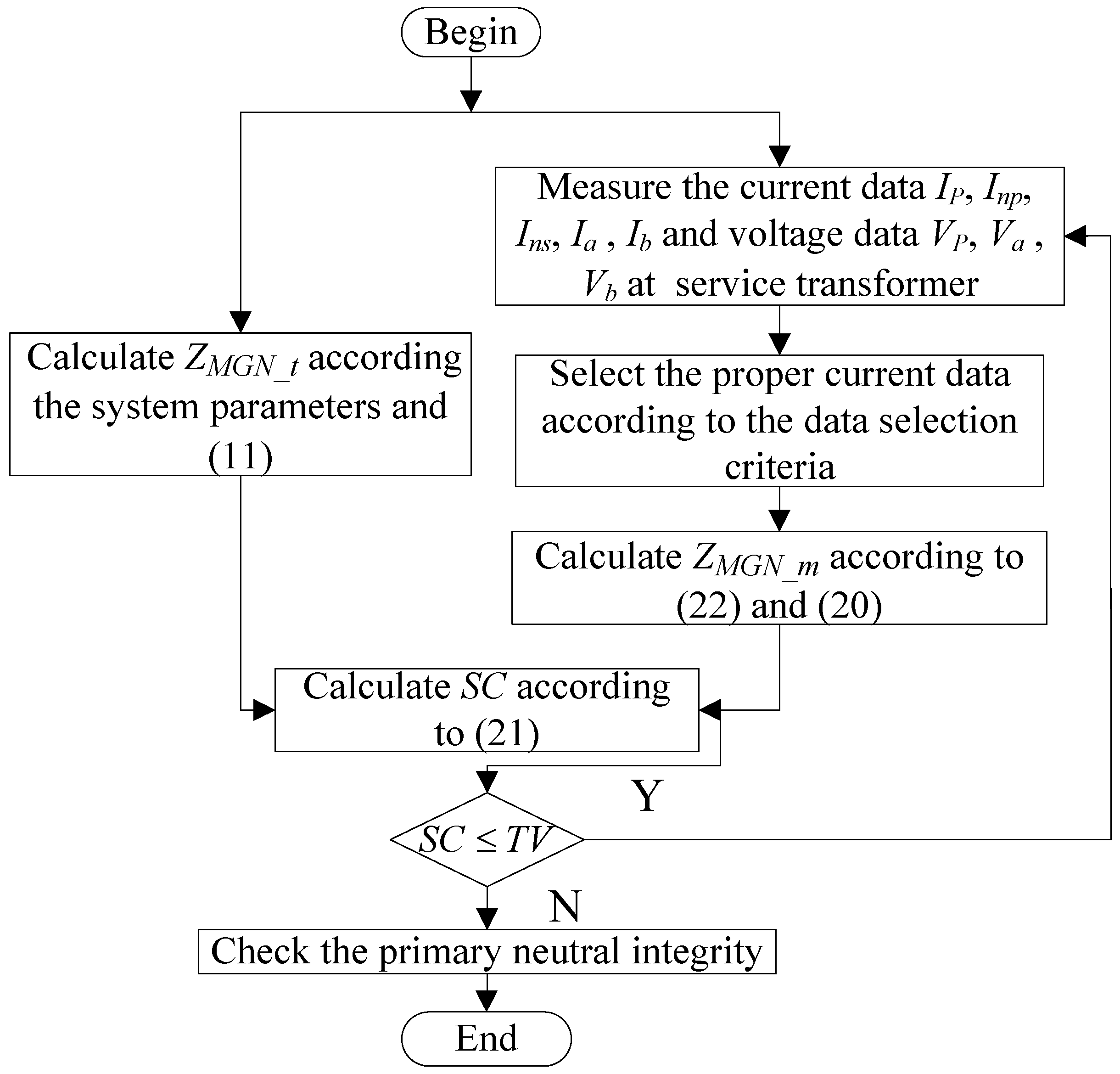
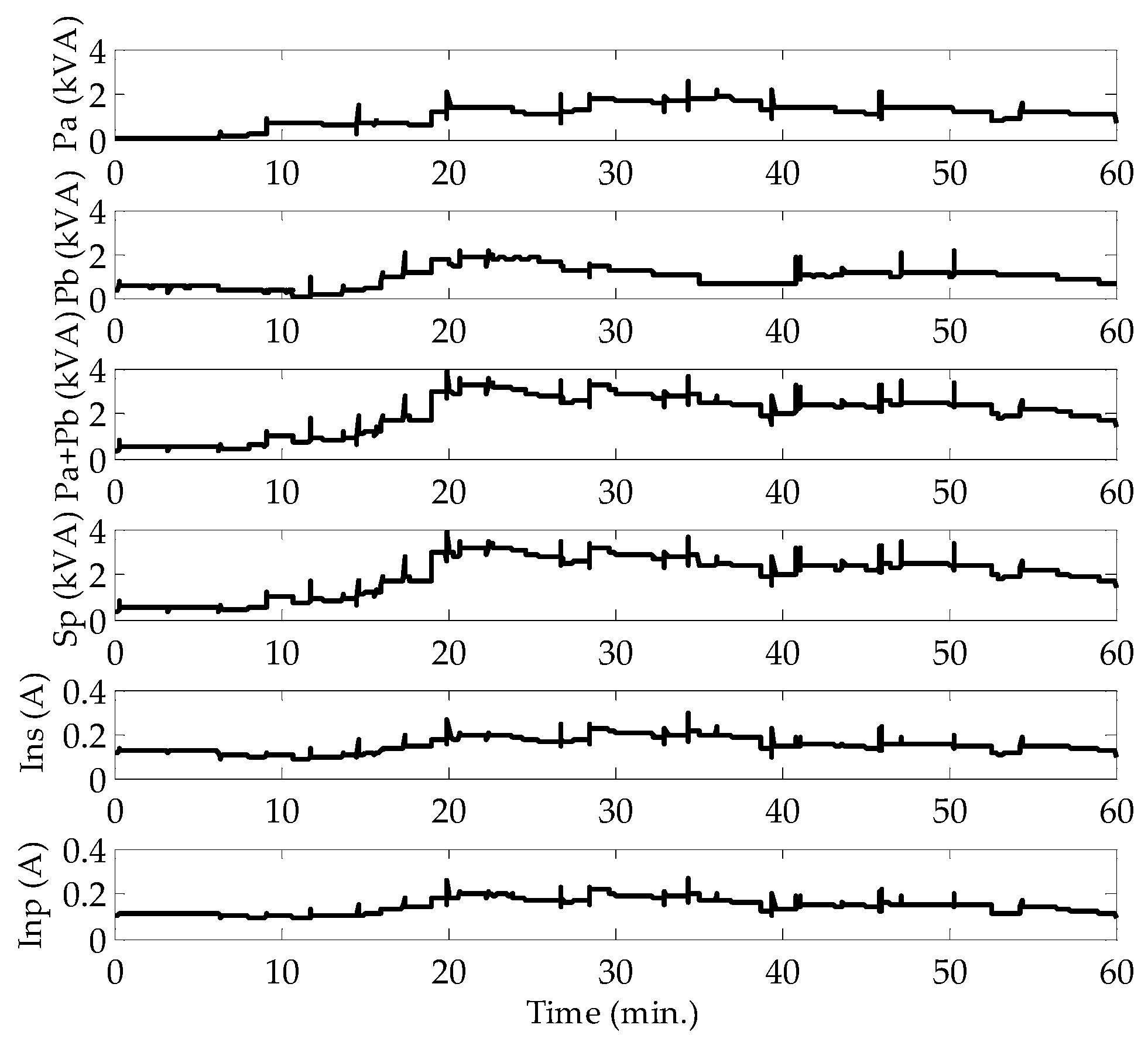
In the actual application, data acquisition devices can be installed at the service transformer, and the neutral currents Inp and Ins can be monitored continuously. Therefore, parameter g can be estimated according to Equation (19) based on the variation of the neutral current. The transformer grounding impedance can be known based on the substation data, and then ZMGN can be estimated by Equation (20).
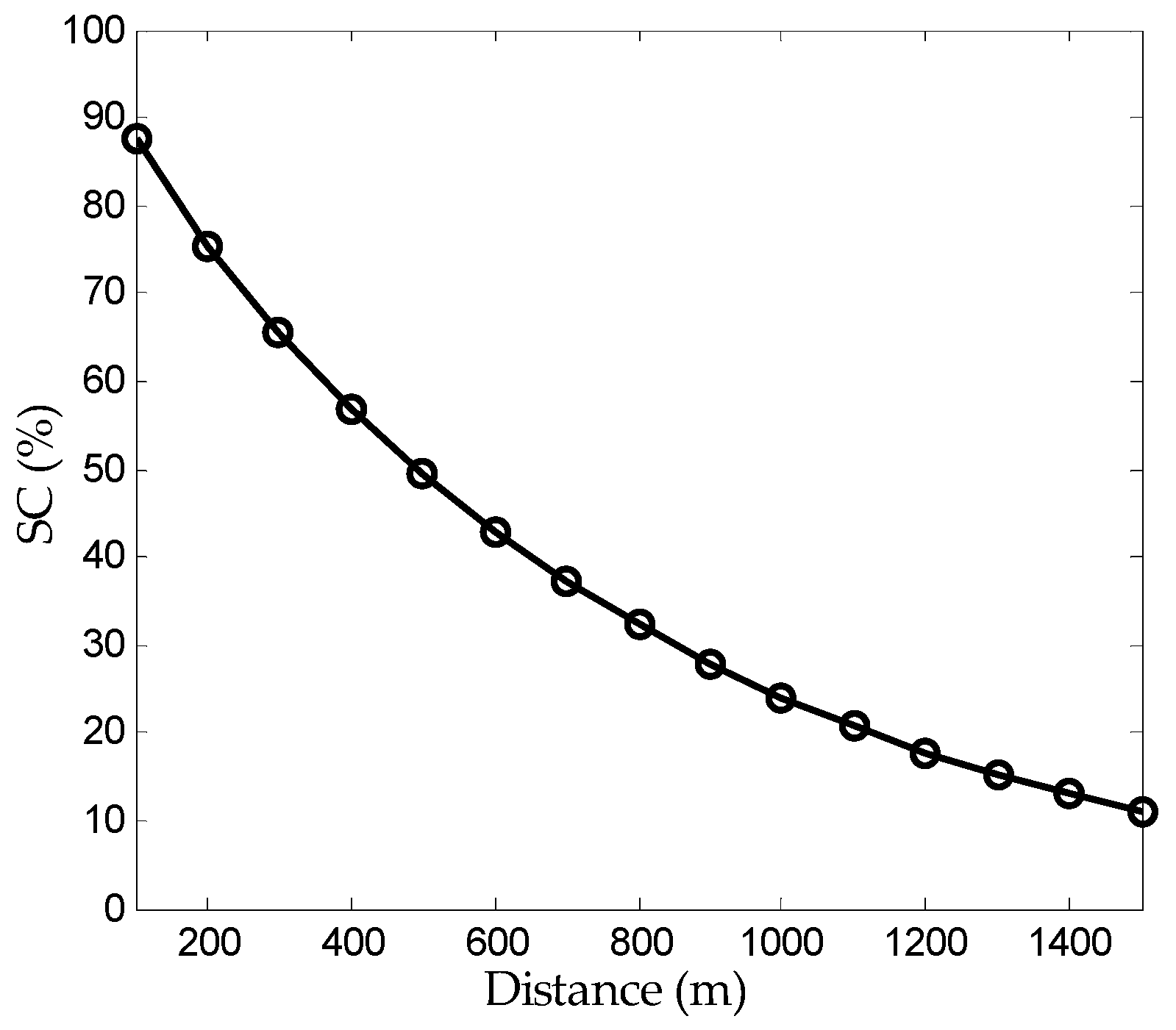
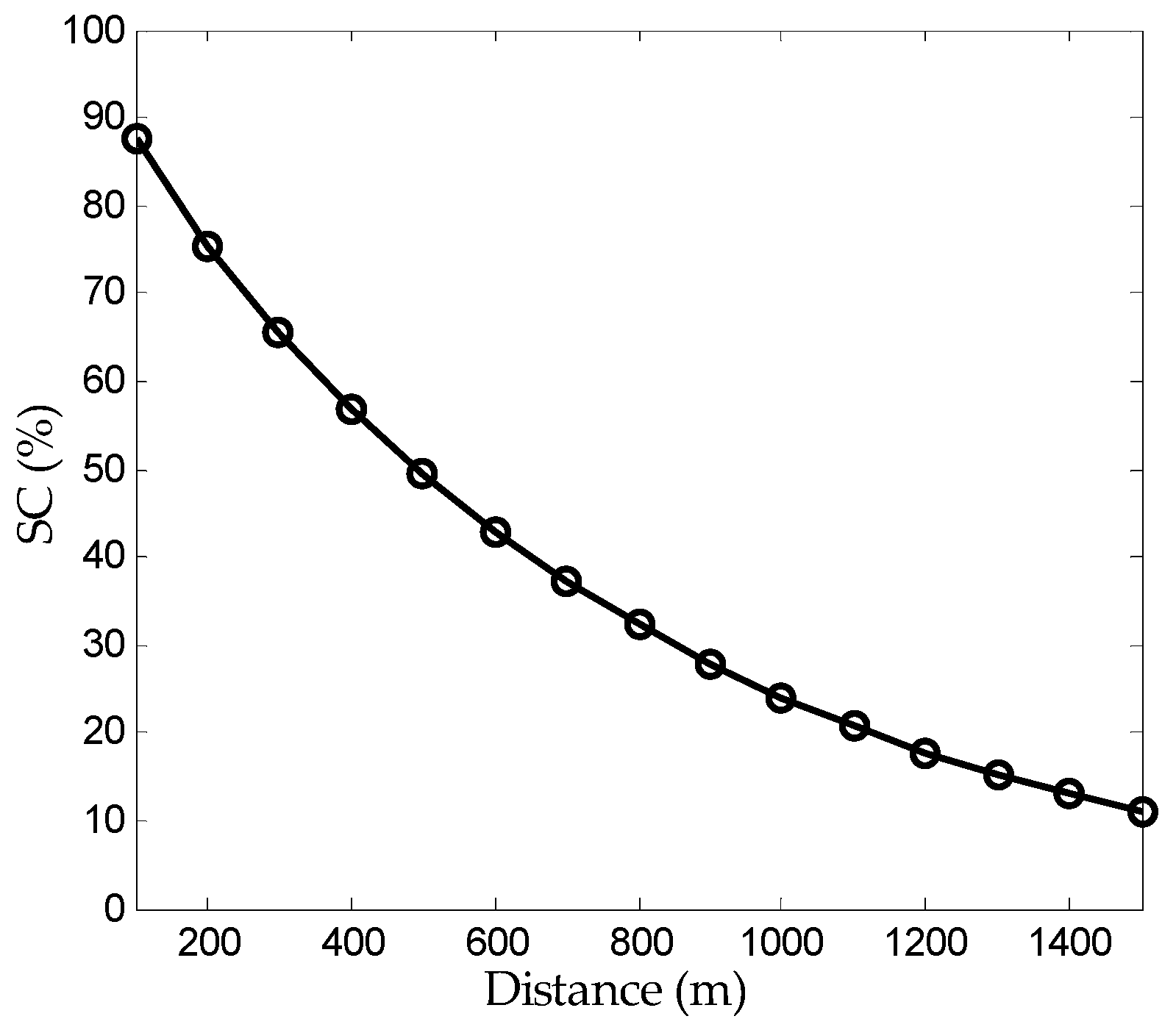
A sensitivity coefficient
SC is proposed to evaluate the discrepancy between the monitored
ZMGN and theoretical
ZMGN.
where
ZMGN_t is the theoretical value of
ZMGN obtained from Equation (11), which represents the primary neutral impedance of a normal operating system;
ZMGN_m is the monitored value of
ZMGN based on Equation (20), which can reflect the actual condition of the primary neutral groundings. Under normal operating conditions, the monitored parameter
ZMGN_m should equal its theoretical value
ZMGN_t, and
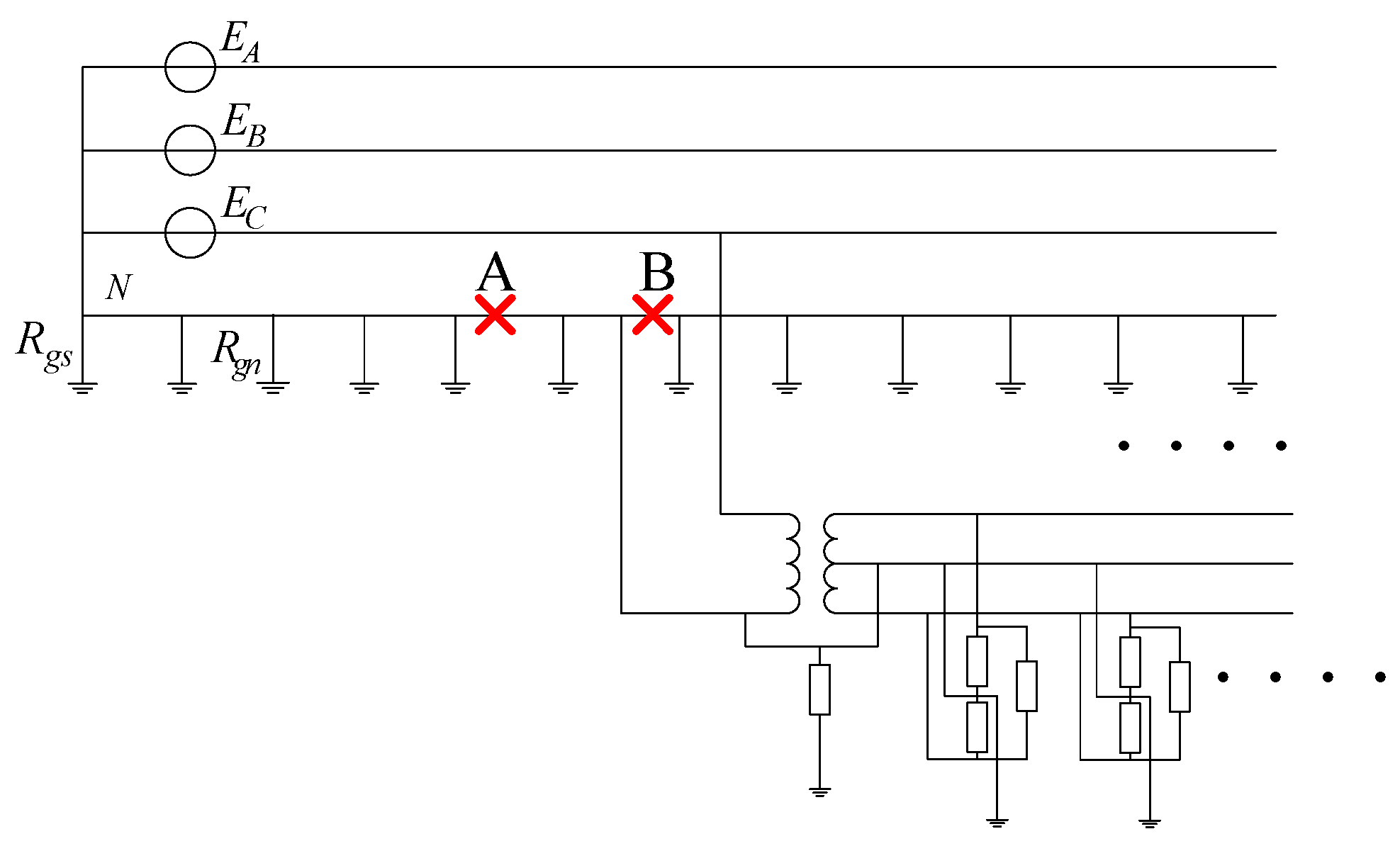
SC should be of a value nearly of zero. If there is a neutral broken problem happening at the primary side, the value of
ZMGN_m will increase. Referring to
Figure 1, it is known that the nearer the neutral broken point to the monitored transformer, the larger
ZMGN and the larger
SC. Therefore, the value of
SC not only reflects the primary neutral condition, but also reflects the distance of the primary neutral broken point to the monitored service transformer.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}