
A Novel High-Frequency Voltage Standing-Wave Ratio-Based Grounding Electrode Line Fault Supervision in Ultra-High Voltage DC Transmission Systems

Abstract
:1. Introduction
2. Overview of High-Frequency Impedance Supervision Technique for Grounding Electrode Line Fault
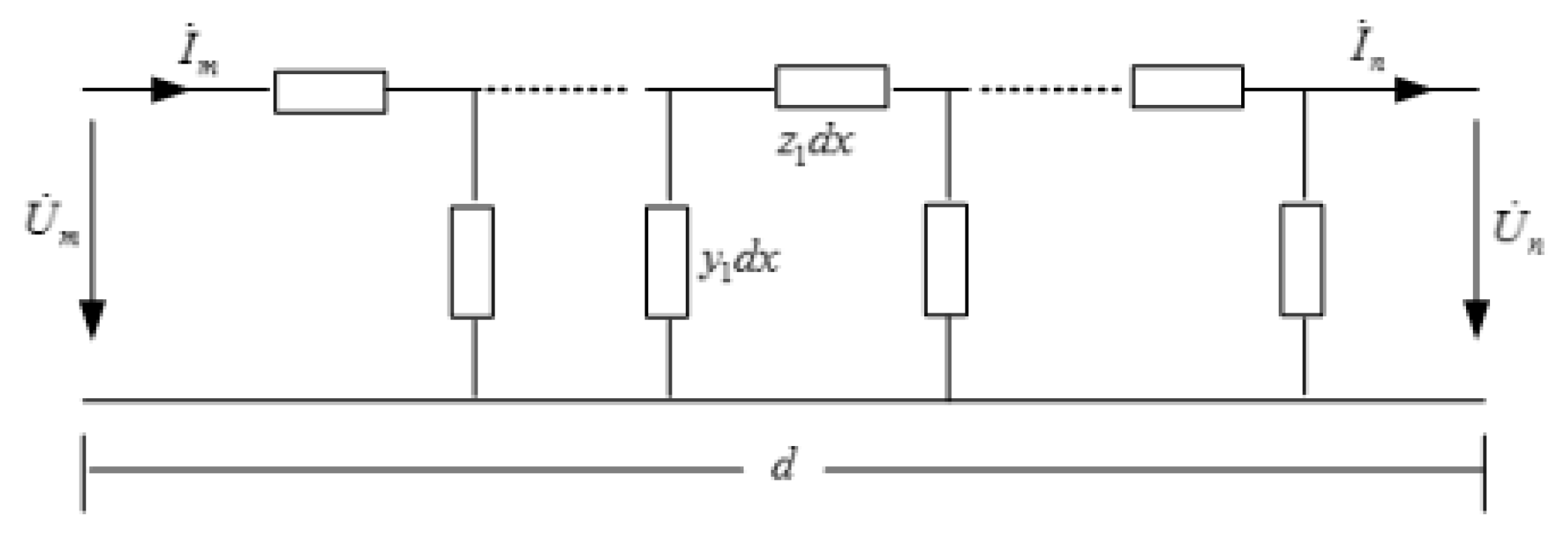
2.1. The Operation Principle
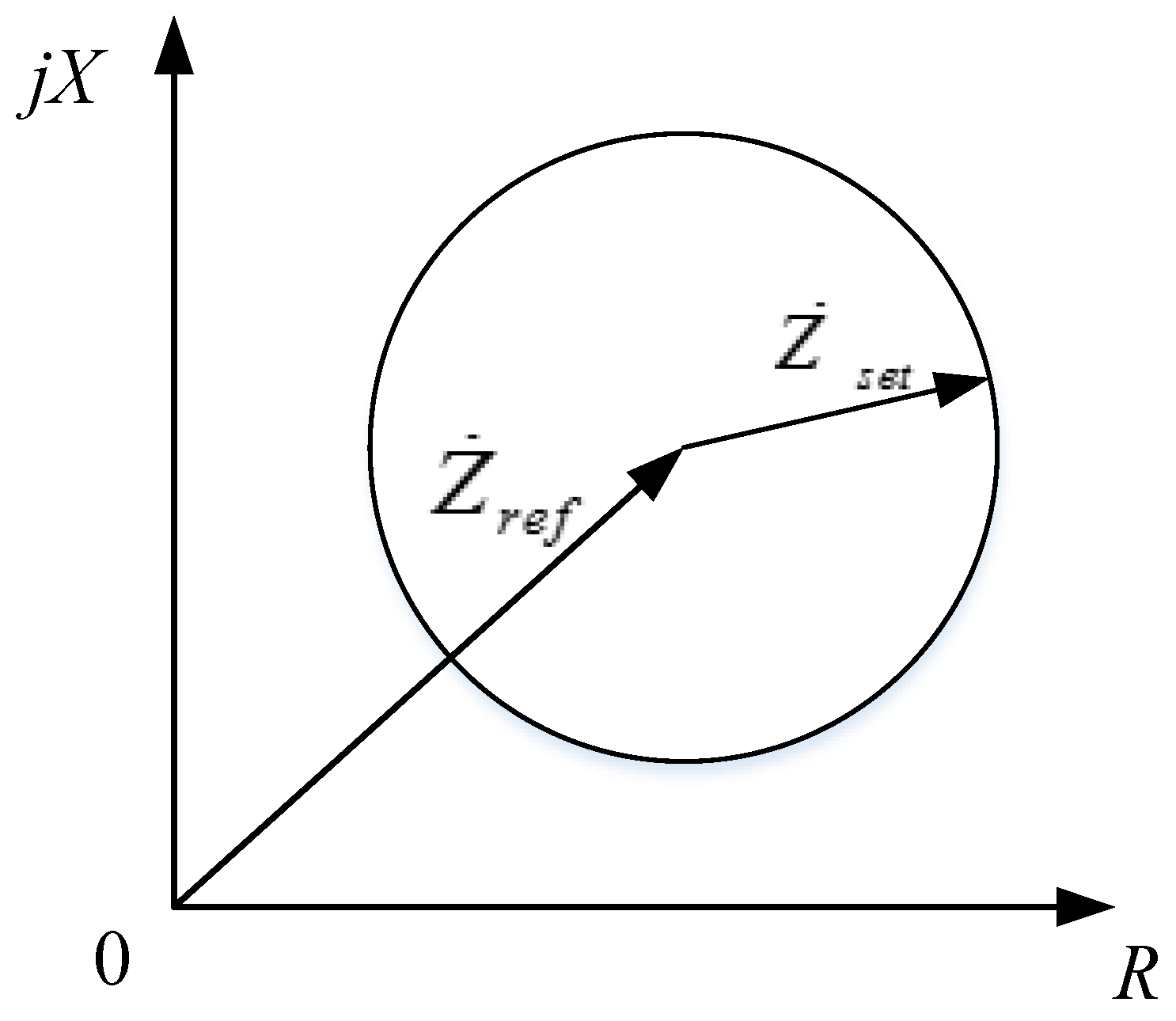
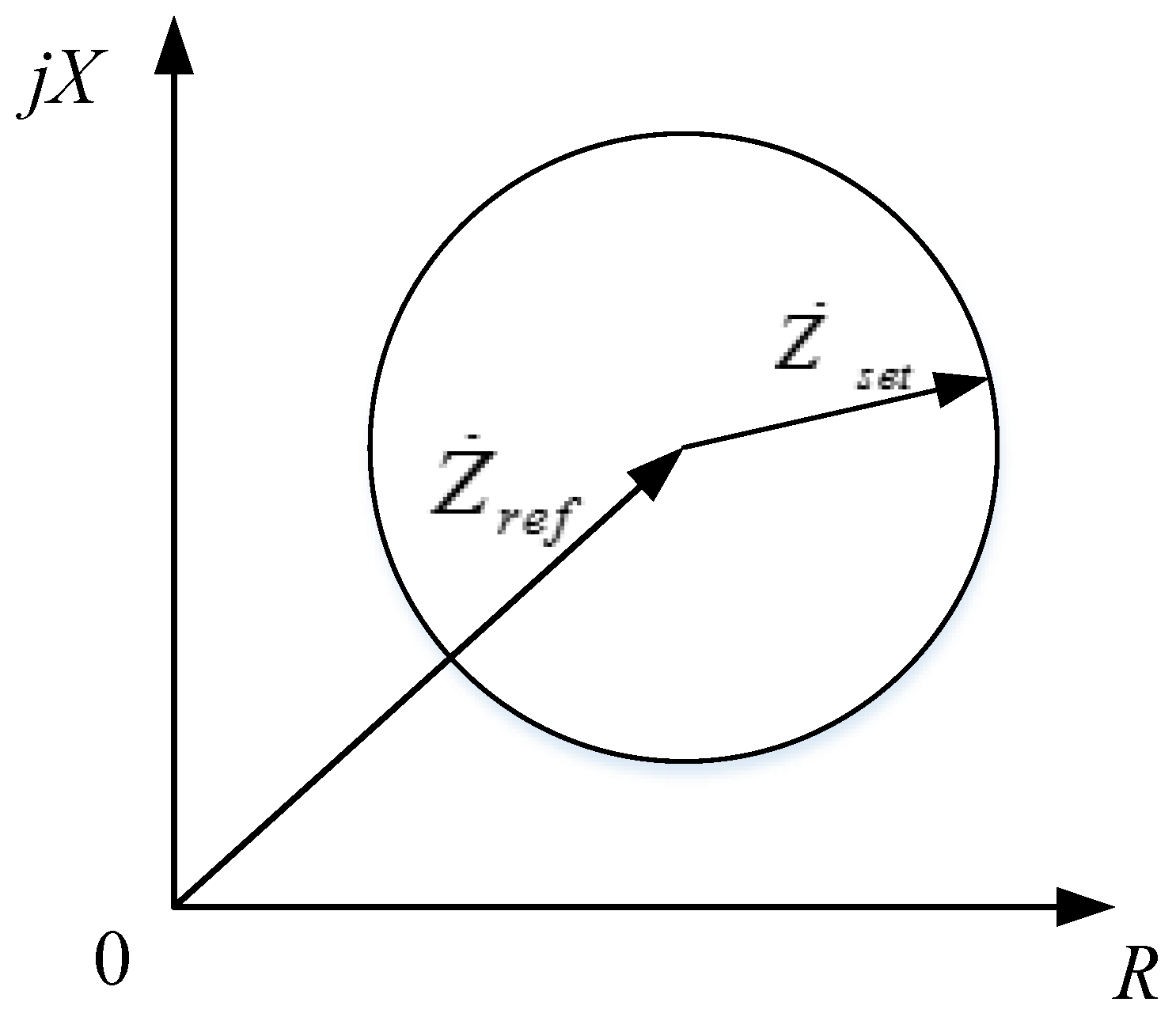
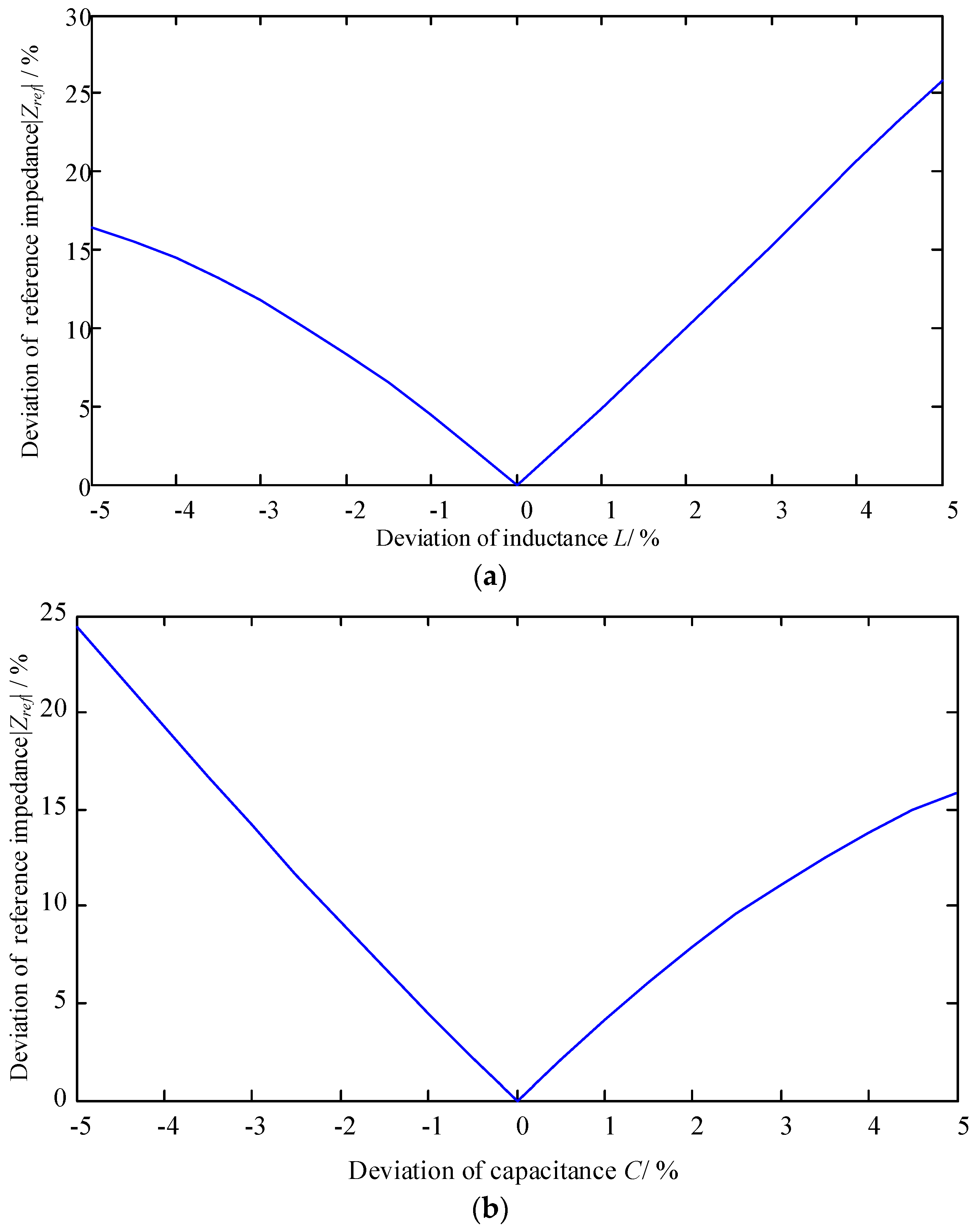
2.2. Performance Evaluation of Conventional ELIS Technique
3. The VSWR Technique for Grounding Electrode Line Fault
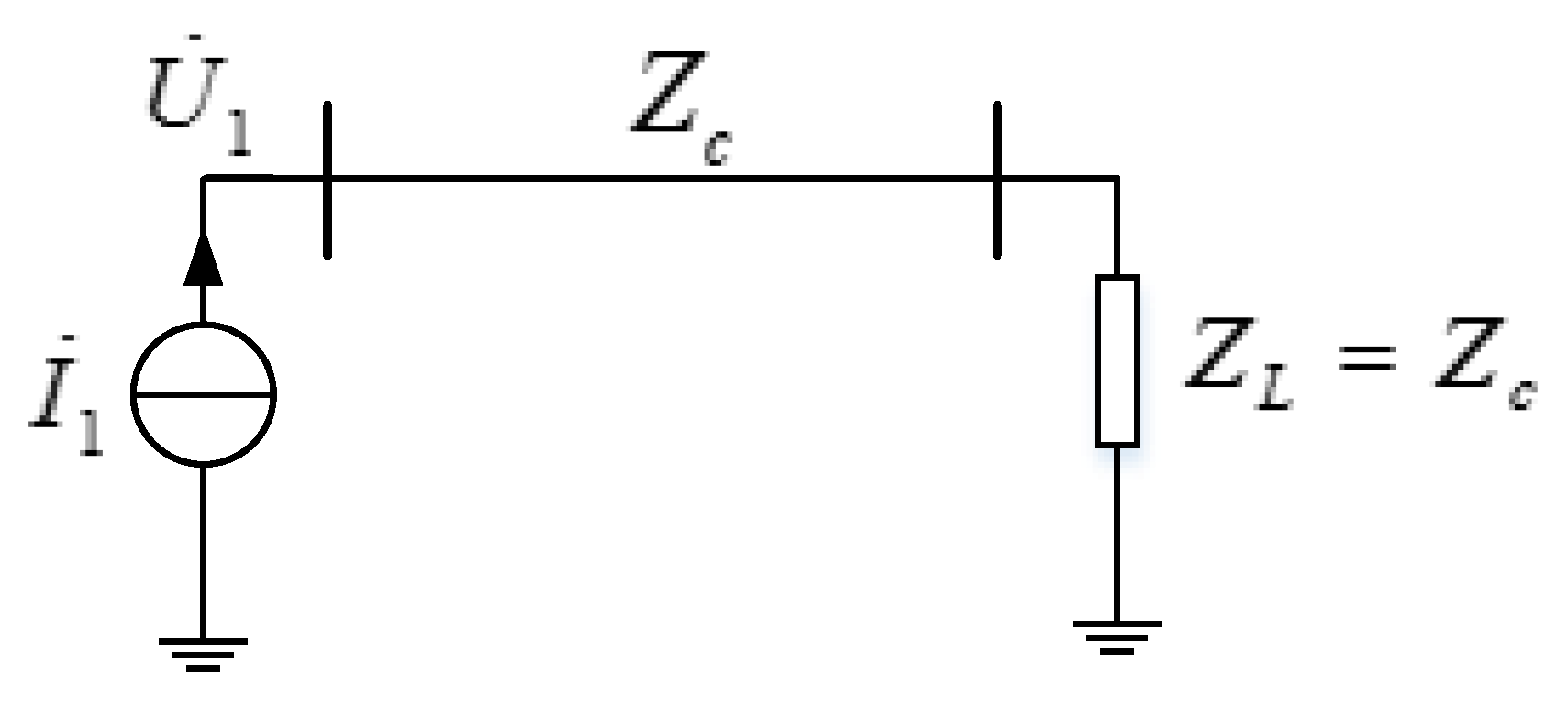
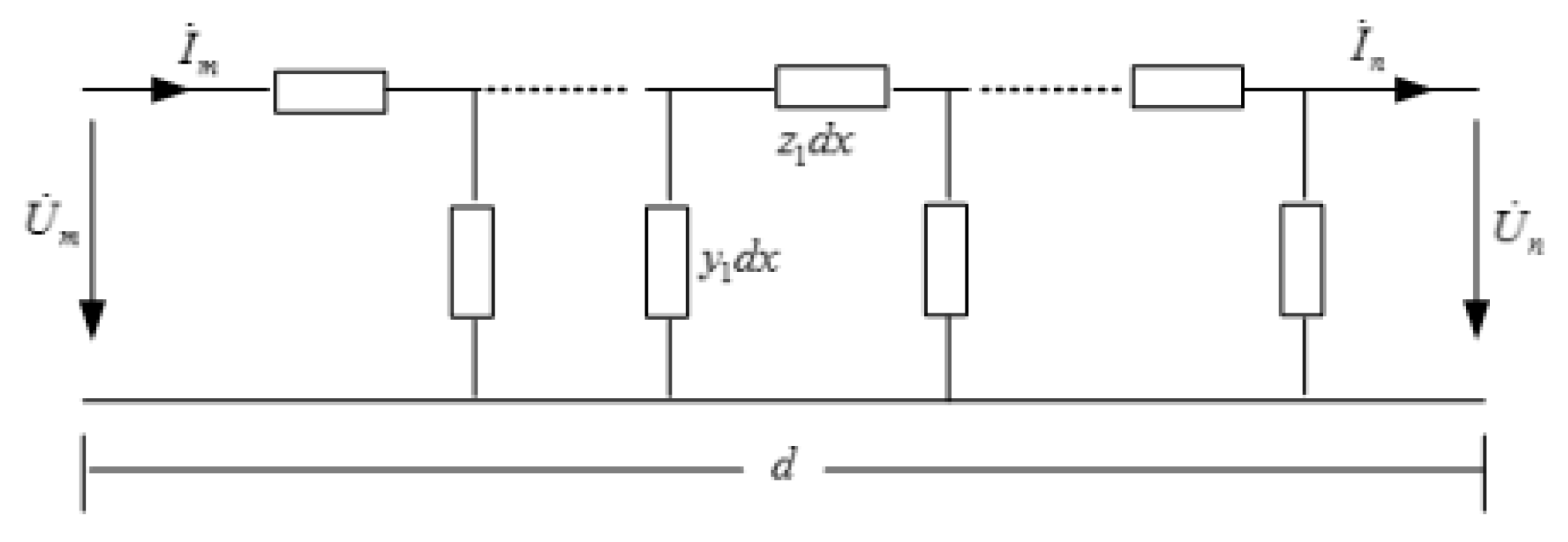
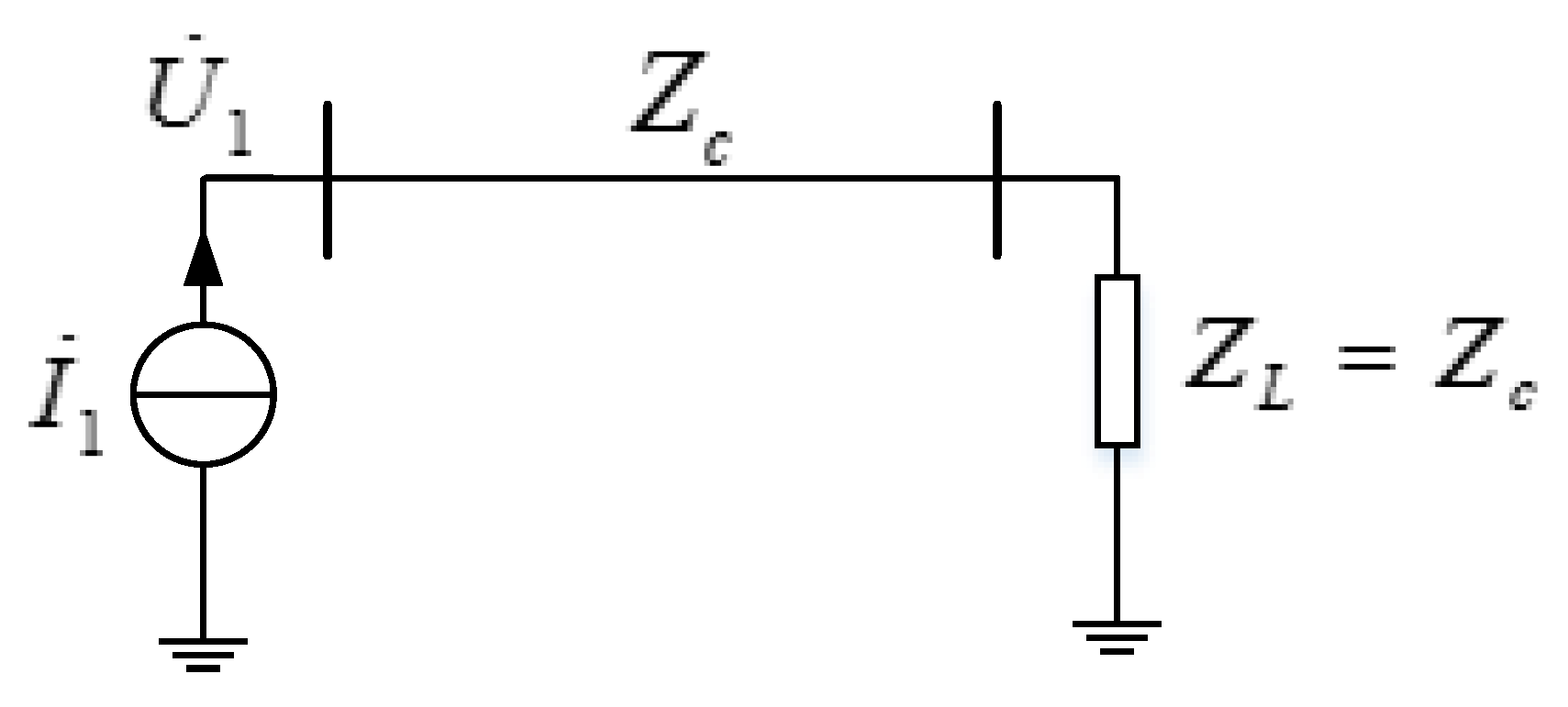
3.1. VSWR on a Lossless Transmission Line
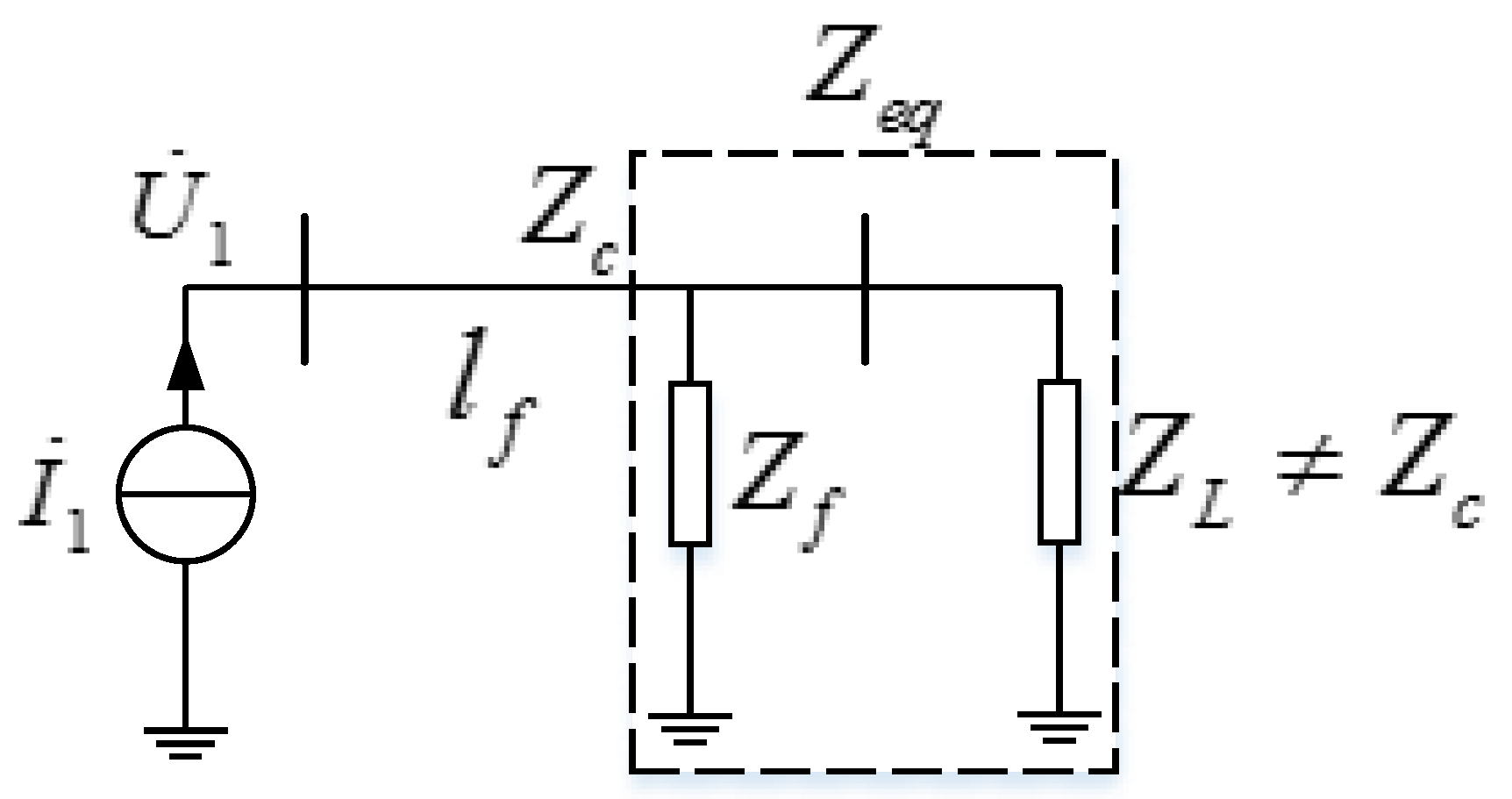
3.2. Calculation of VSWR
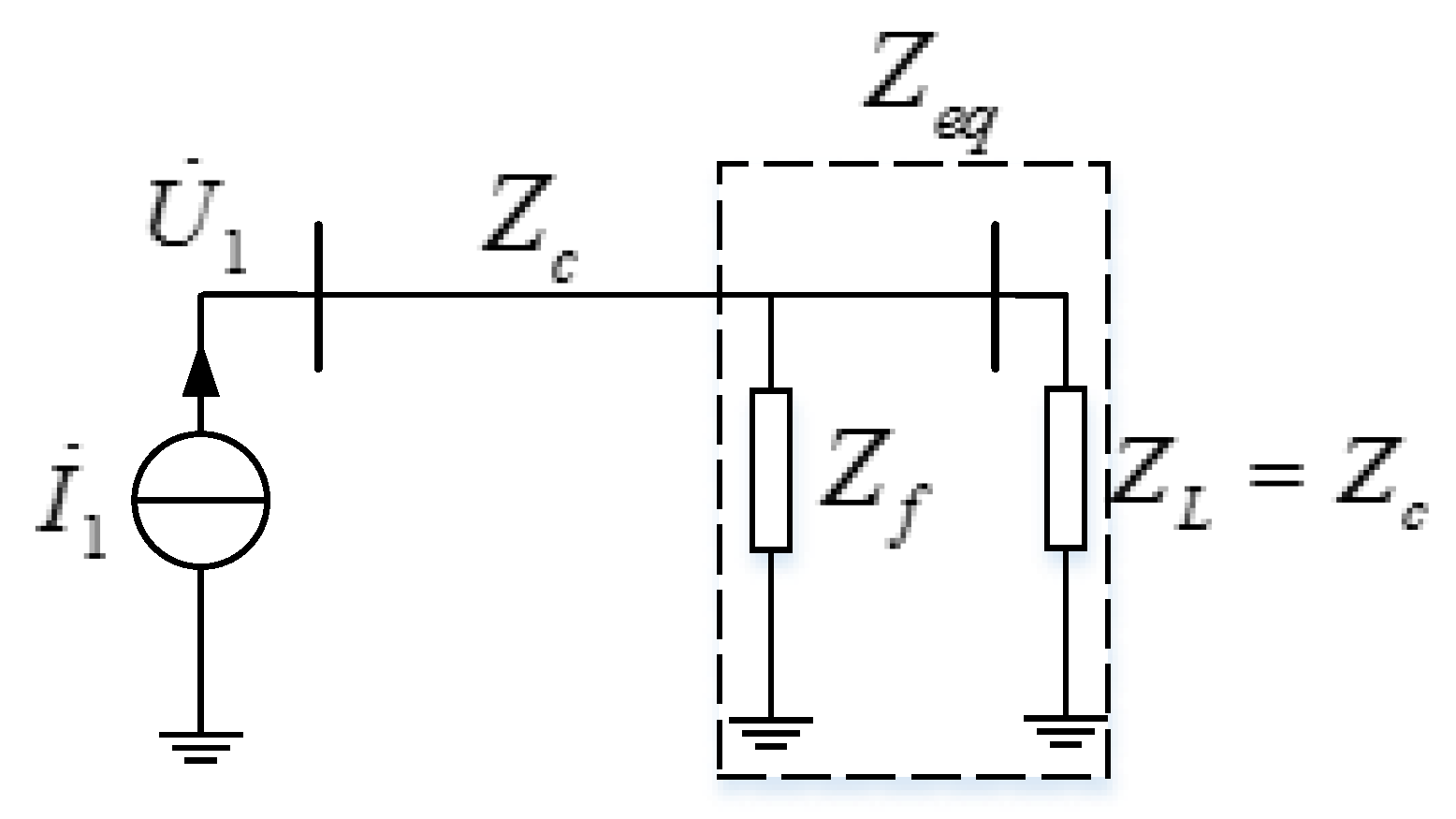
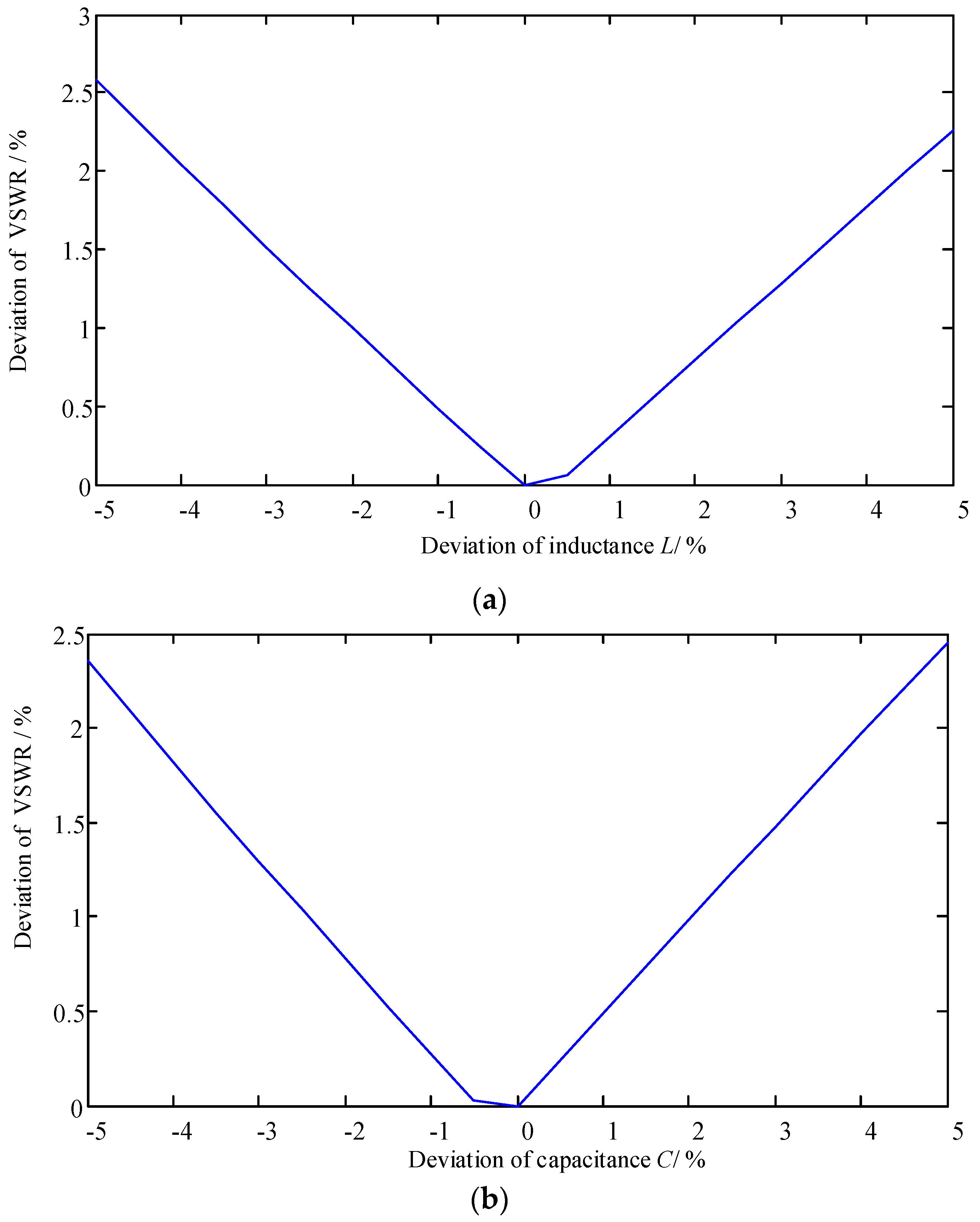
3.3. The Characteristics of the VSWR under Various Fault Conditions
3.4. High Frequency VSWR-Based Grounding Electrode Line Fault Supervision
4. Case Study
4.1. Simulation Model
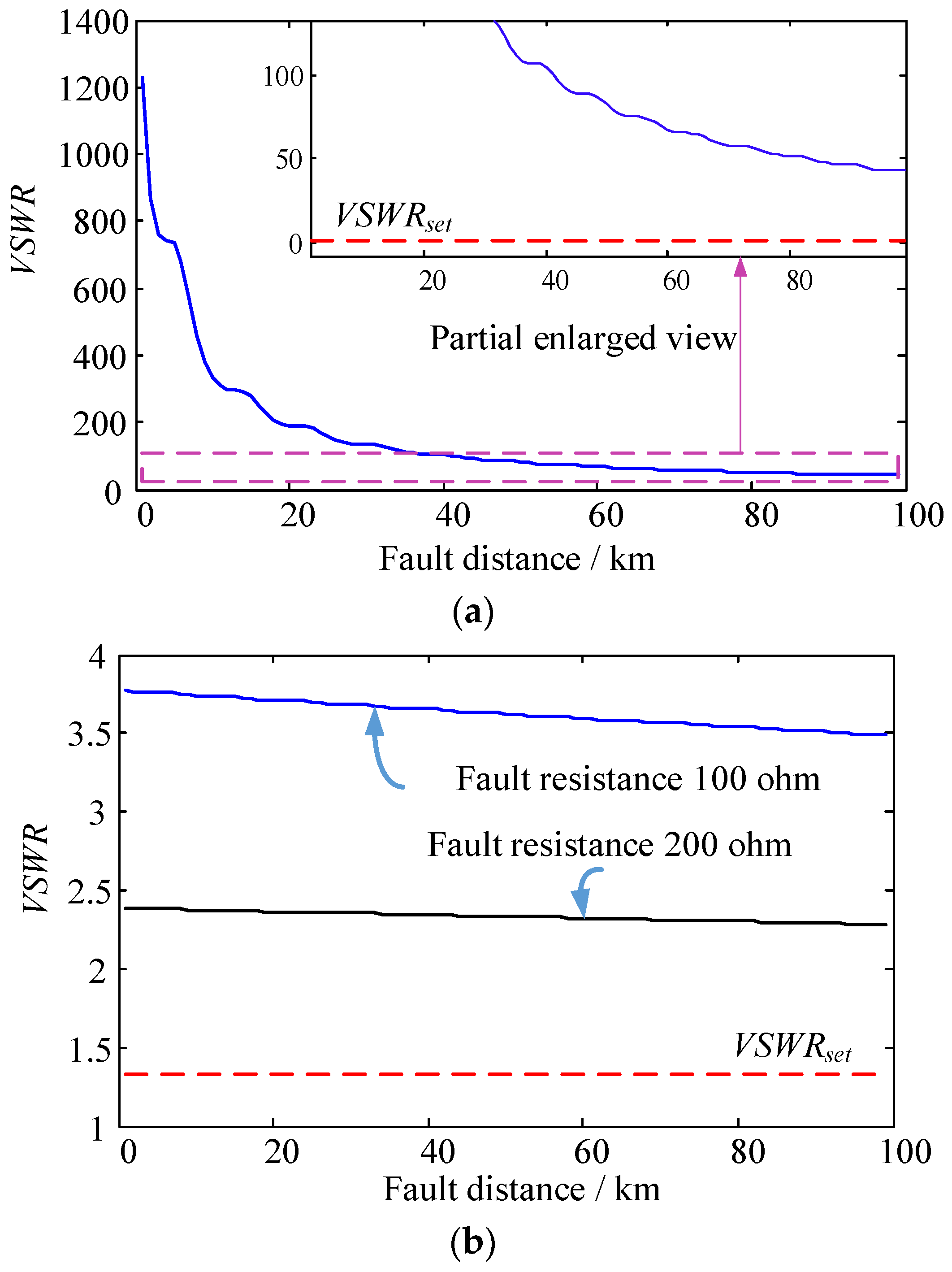
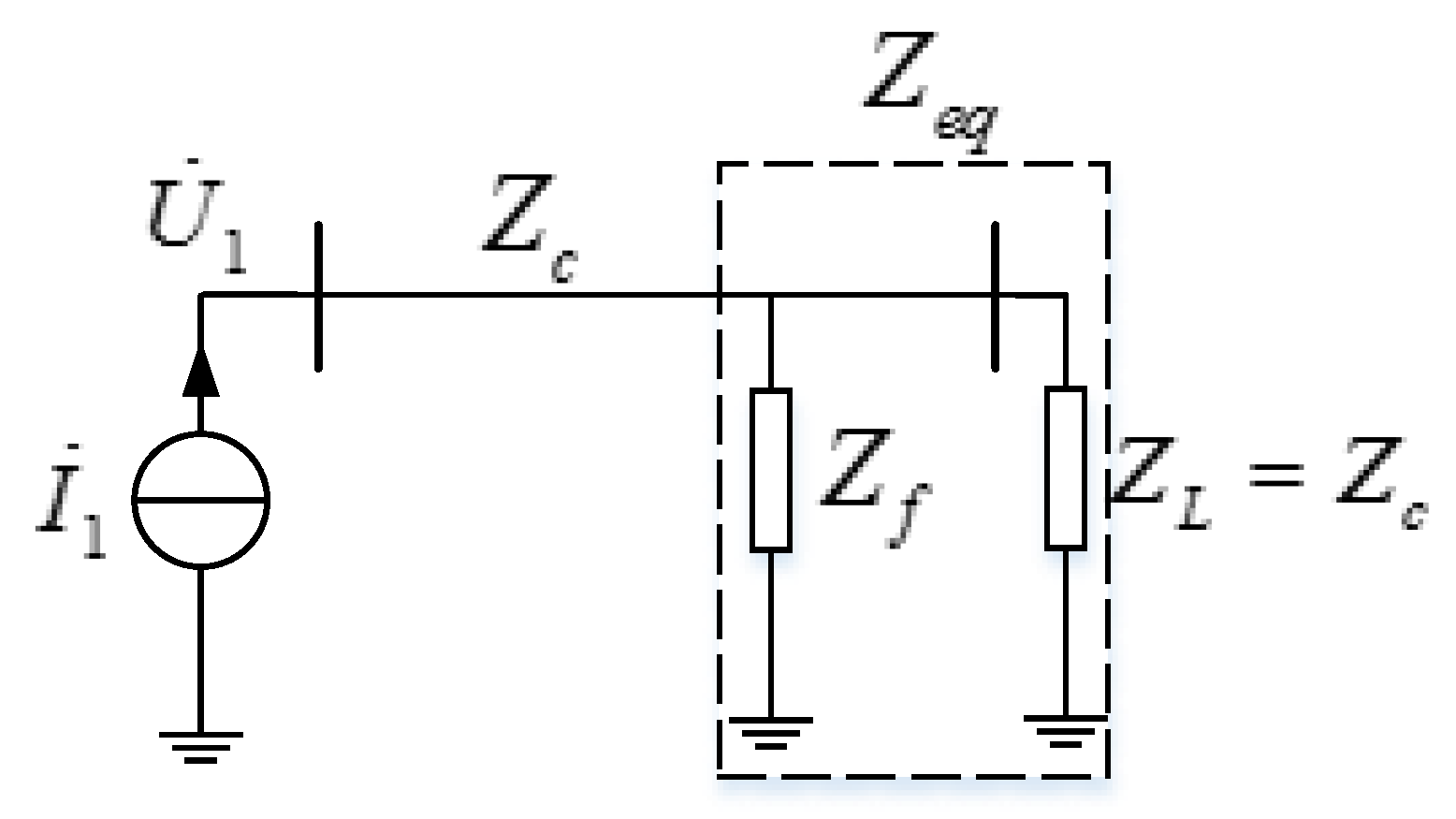
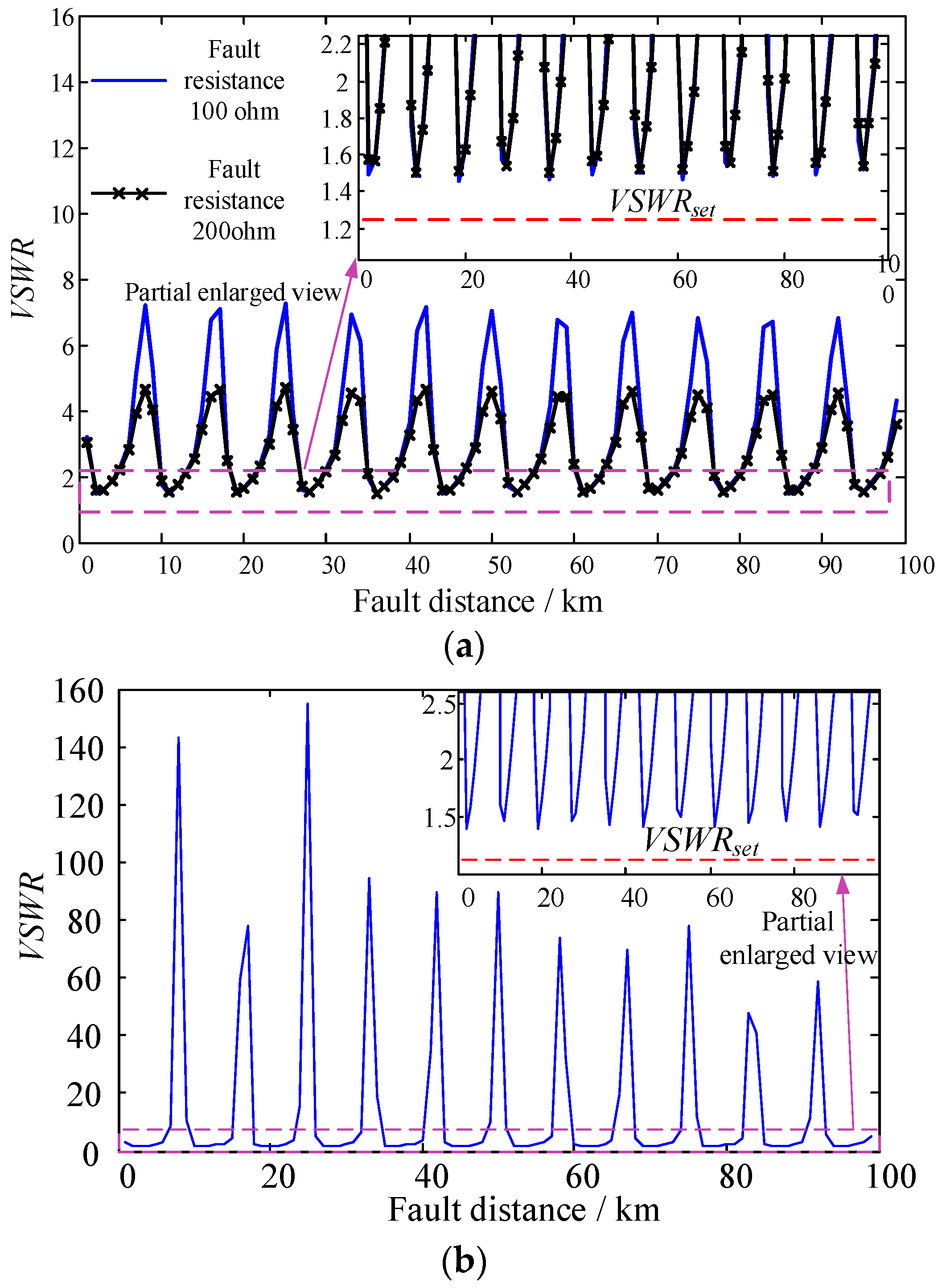
4.2. With Matched Terminal Resistor
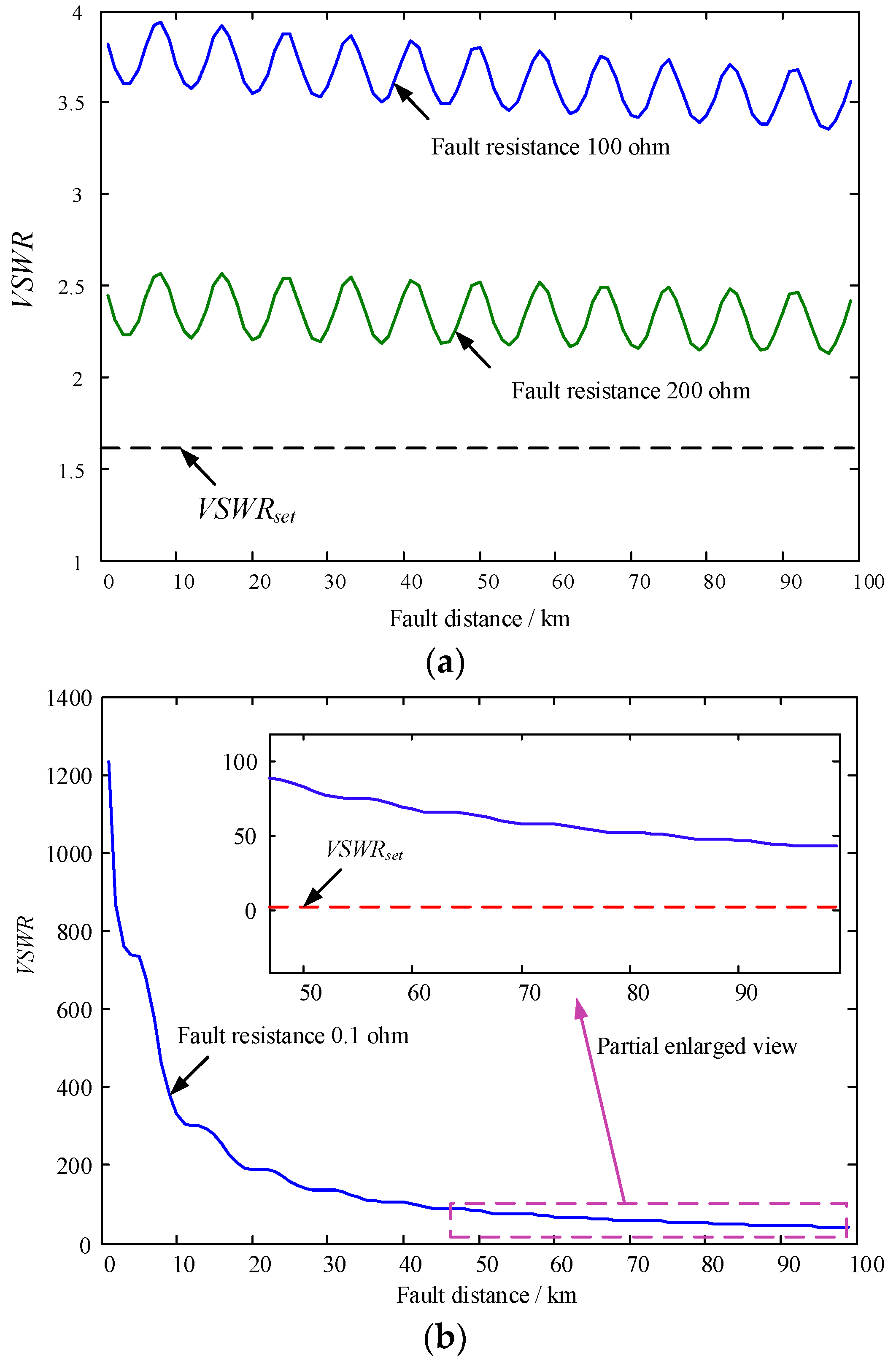
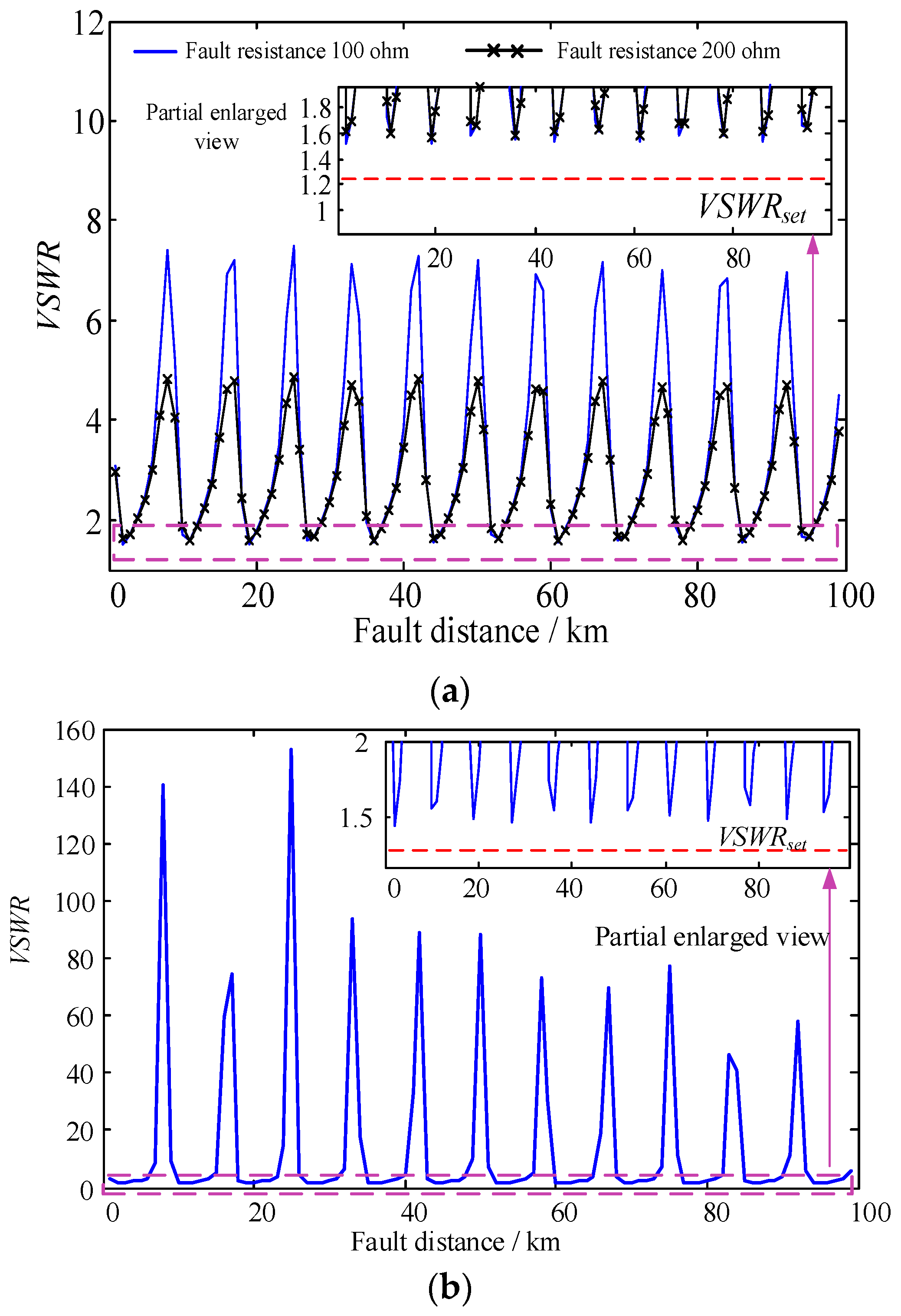
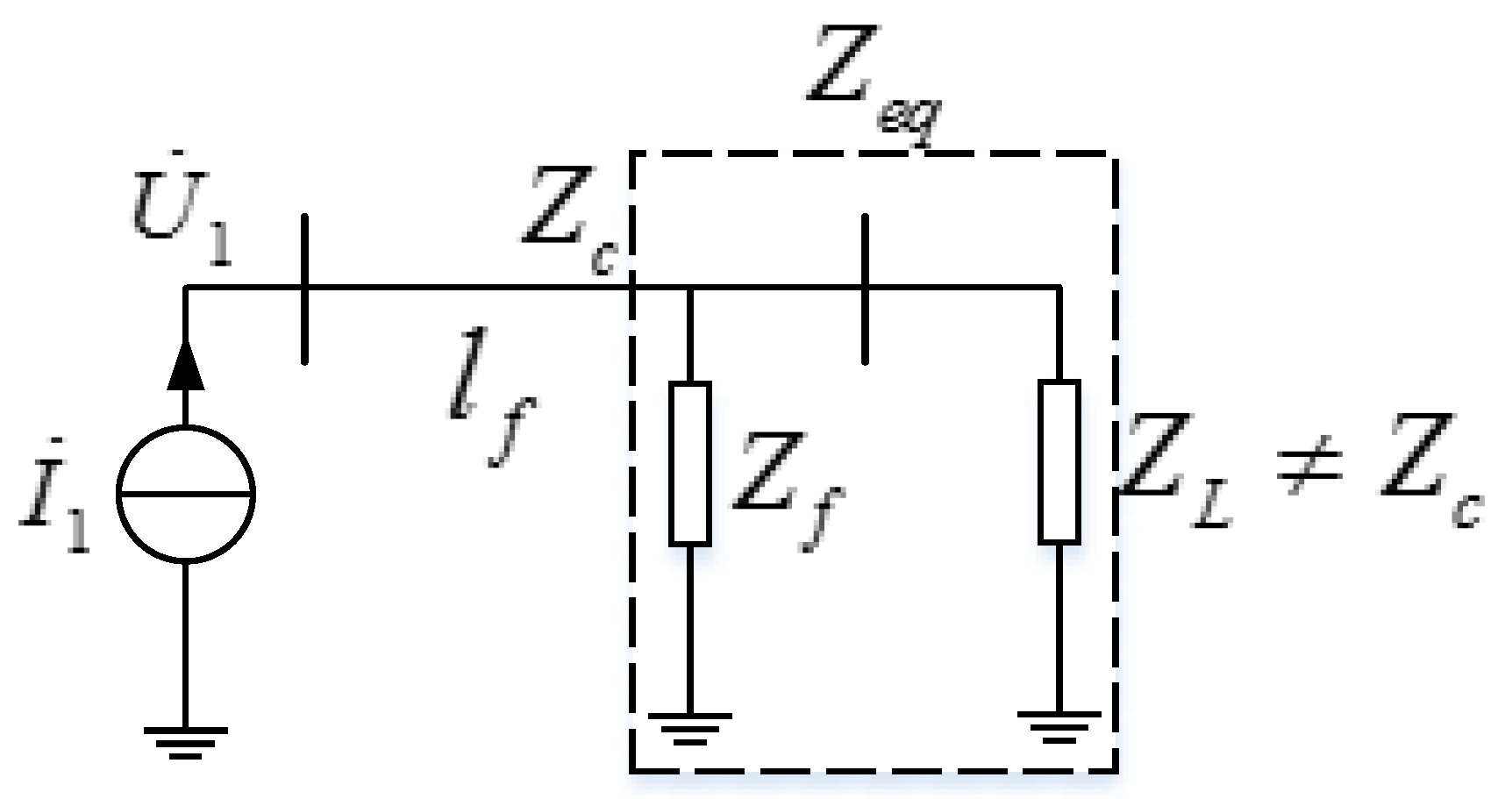
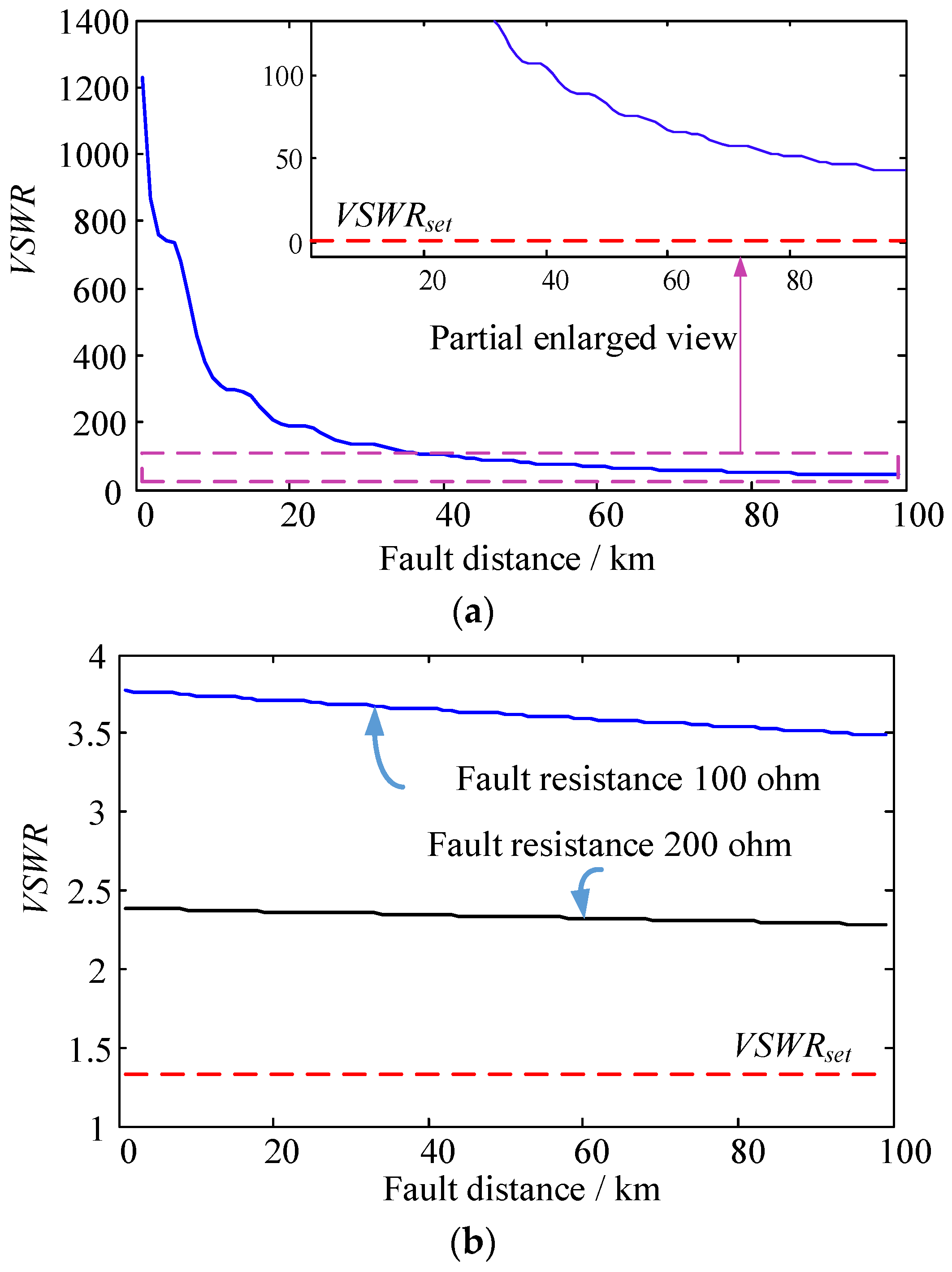
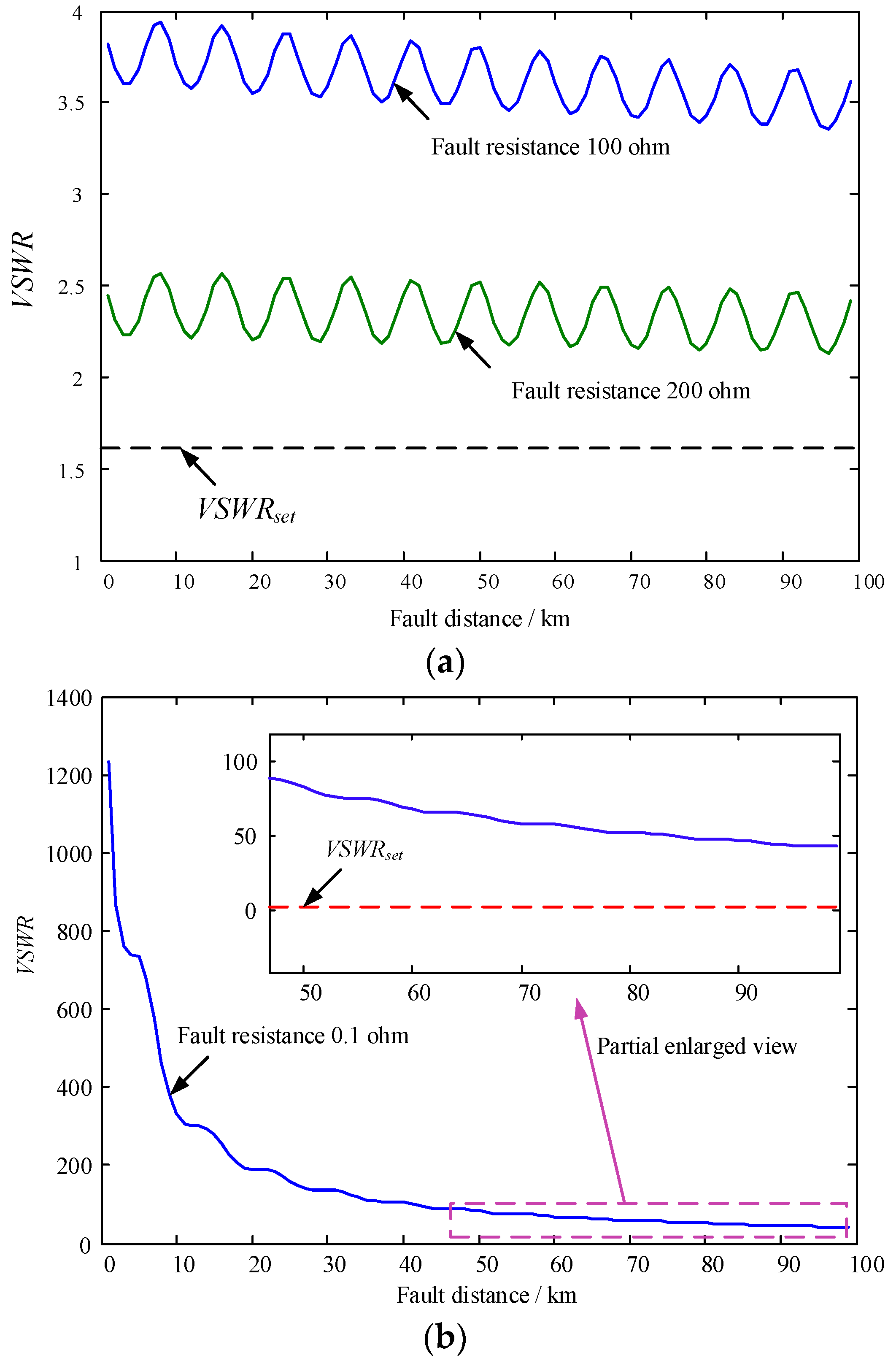
4.3. With Mismatched Terminal
4.4. Summary
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akhmatov, V.; Callavik, M.; Franck, C.M.; Rye, S.E.; Ahndorf, T.; Bucher, M.K.; Muller, H.; Schettler, F.; Wiget, R. Technical guidelines and prestandardization work for first HVDC grids. IEEE Trans. Power Deliv. 2014, 29, 327–335. [Google Scholar] [CrossRef]
- Hammons, T.J.; Woodford, D.; Loughtan, M.; Chamia, M. Role of HVDC transmission in future energy development. IEEE Power Eng. Rev. 2000, 20, 10–25. [Google Scholar] [CrossRef]
- Wei, Z.; Yuan, Y.; Lei, X.; Wang, H.; Sun, G.; Sun, Y. Direct-current predictive control strategy for inhibiting commutation failure in HVDC converter. IEEE Trans. Power Syst. 2014, 29, 2409–2417. [Google Scholar] [CrossRef]
- Li, S.; Haskew, T.A.; Xu, L. Control of HVDC light system using conventional and direct current vector control approaches. IEEE Trans. Power Electr. 2010, 25, 3106–3118. [Google Scholar]
- Pan, Z.; Wang, X.; Tan, B.; Zhu, L.; Liu, Y.; Liu, Y.; Wen, X. Potential compensation method for restraining the DC bias of transformers during HVDC monopolar operation. IEEE Trans. Power Deliv. 2014, 31, 103–111. [Google Scholar] [CrossRef]
- Li, W.; Liu, L.; Zheng, T.; Huang, G.; Shi, H. Research on effects of transformer DC bias on negative sequence protection. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection (APAP), Beijing, China, 16–20 October 2011; pp. 1458–1463.
- Yuan, S.; Gong, X.; Luo, Y. Design of UHVDC earth electrode. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014; pp. 2217–2220.
- Yang, G.; Zhu, T.; Wei, L.; Li, L. Research on the faults of electrode line of HVDC transmission system in monopolar ground return operation. Power Syst. Prot. Control 2009, 37, 45–49. [Google Scholar]
- Xiao, Y.; Niu, B.; Shang, C.; Lin, Z.; Lu, Y.; Fan, L.; Li, S. A proposal for fast tripping grounding electrode line fault of HVDC. Autom. Electr. Power Syst. 2009, 33, 107–109. [Google Scholar]
- Cheng, J.; Xu, Z. Protection characteristics of HVDC common grounding electrode lines. Autom. Electr. Power Syst. 2012, 36, 77–82. [Google Scholar]
- Zeng, X.; Zhang, X.; Yang, T.; Deng, S. Improvement measures of electrodes line unbalance protection for HVDC system. Power Syst. Prot. Control 2014, 42, 132–136. [Google Scholar]
- Wang, W.; Gervais, Y.; Mukhedkar, D. Probabilistic evaluation of human safety near HVDC ground electrode. IEEE Trans. Power Deliv. 1986, 1, 105–110. [Google Scholar] [CrossRef]
- Teng, Y.; Wang, Y.; Jiao, Z.; Zhang, C.; Pang, G. Impedance monitoring scheme for ground electrode line of ultra-high voltage DC transmission system. Trans. China Electrotech. Soc. 2016, 31, 157–163. [Google Scholar]
- Teng, Y.; Tang, Y.; Zhou, B.; Jiao, Z.; Pang, G. Monitoring scheme for UHVDC ground electrode line fault on the basis of high-frequency voltage variation. High Volt. Eng. 2016, 42, 73–78. [Google Scholar]
- ABB. 1JNL100054-633, Electrode Line Impedance Supervision; ABB: Vasteras, Sweden, 2002. [Google Scholar]
- IEEE Standard 1893TM-2015. IEEE Guide for the Measurement of DC Transmission Line and Earth Electrode Line Parameters; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Values | L (mH/km) | R (ohm/km) | C (uF/km) |
|---|---|---|---|
| Real value | 2.3709 | 0.2626 | 0.007638 |
| Measured value | 2.3709 | 0.2626 | 0.007714 |
| Parameters | L (mH/km) | R (ohm/km) | C (uF/km) |
|---|---|---|---|
| Values | 2.3709 | 0.2626 | 0.0077 |
| Simulation Scenarios | Operation Conditions | ||
|---|---|---|---|
| With Matched terminal resistor | Normal operation | Double-line earth fault | Single-line earth fault |
| 0.1 Ω/100 Ω/200 Ω | 0.1 Ω/100 Ω/200 Ω | ||
| With mismatched terminal resistor | Normal operation | Double-line earth fault | Single-line earth fault |
| 0.1 Ω/100 Ω/200 Ω | 0.1 Ω/100 Ω/200 Ω | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, Y.; Li, X.; Huang, Q.; Wang, Y.; Jing, S.; Jiang, Z.; Zhen, W. A Novel High-Frequency Voltage Standing-Wave Ratio-Based Grounding Electrode Line Fault Supervision in Ultra-High Voltage DC Transmission Systems. Energies 2017, 10, 309. https://doi.org/10.3390/en10030309
Teng Y, Li X, Huang Q, Wang Y, Jing S, Jiang Z, Zhen W. A Novel High-Frequency Voltage Standing-Wave Ratio-Based Grounding Electrode Line Fault Supervision in Ultra-High Voltage DC Transmission Systems. Energies. 2017; 10(3):309. https://doi.org/10.3390/en10030309
Chicago/Turabian StyleTeng, Yufei, Xiaopeng Li, Qi Huang, Yifei Wang, Shi Jing, Zhenchao Jiang, and Wei Zhen. 2017. "A Novel High-Frequency Voltage Standing-Wave Ratio-Based Grounding Electrode Line Fault Supervision in Ultra-High Voltage DC Transmission Systems" Energies 10, no. 3: 309. https://doi.org/10.3390/en10030309