
Implementation and Assessment of a Decentralized Load Frequency Control: Application to Power Systems with High Wind Energy Penetration

 , and
, and 
Abstract
:1. Introduction
2. Proposed System
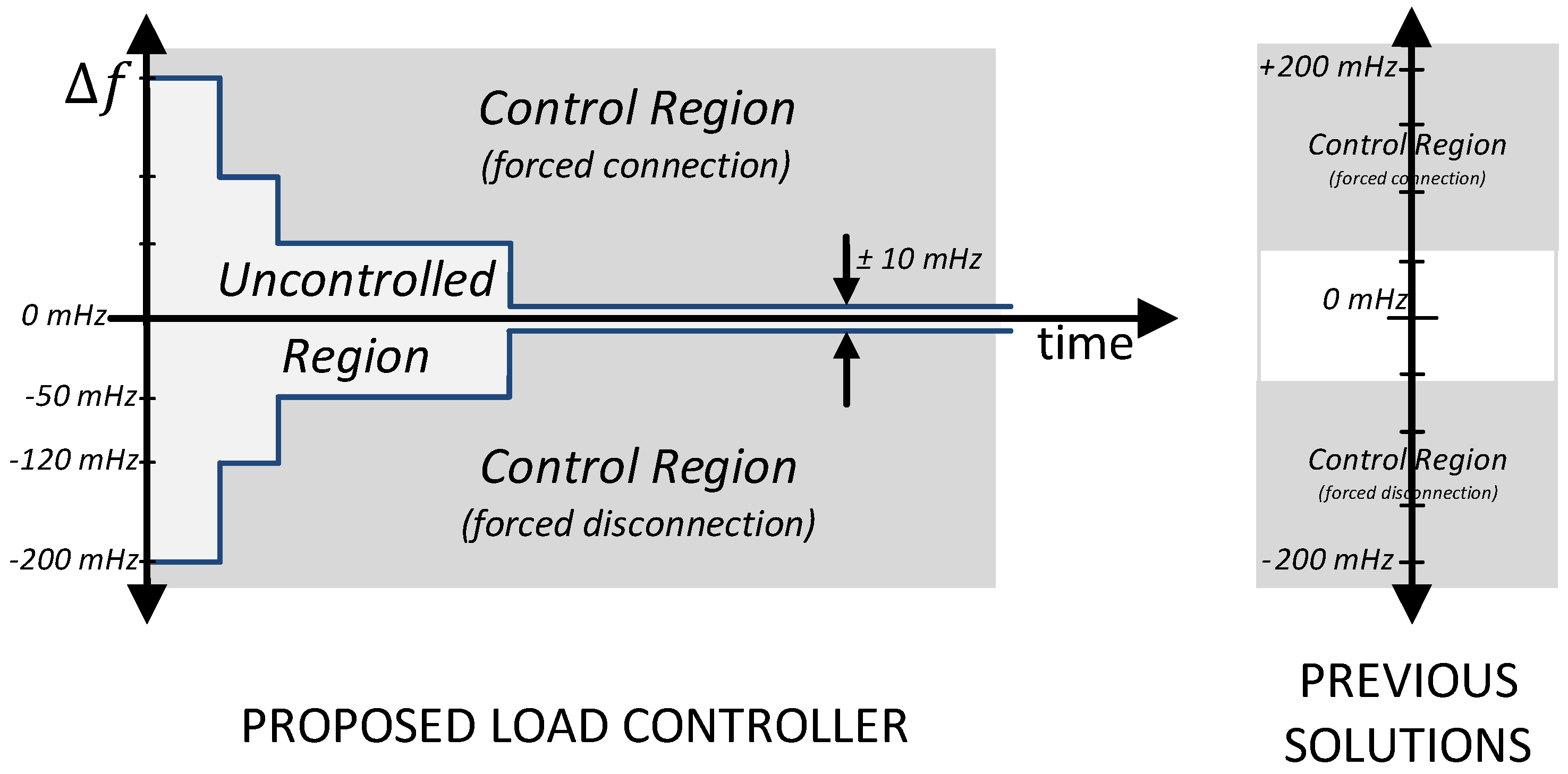
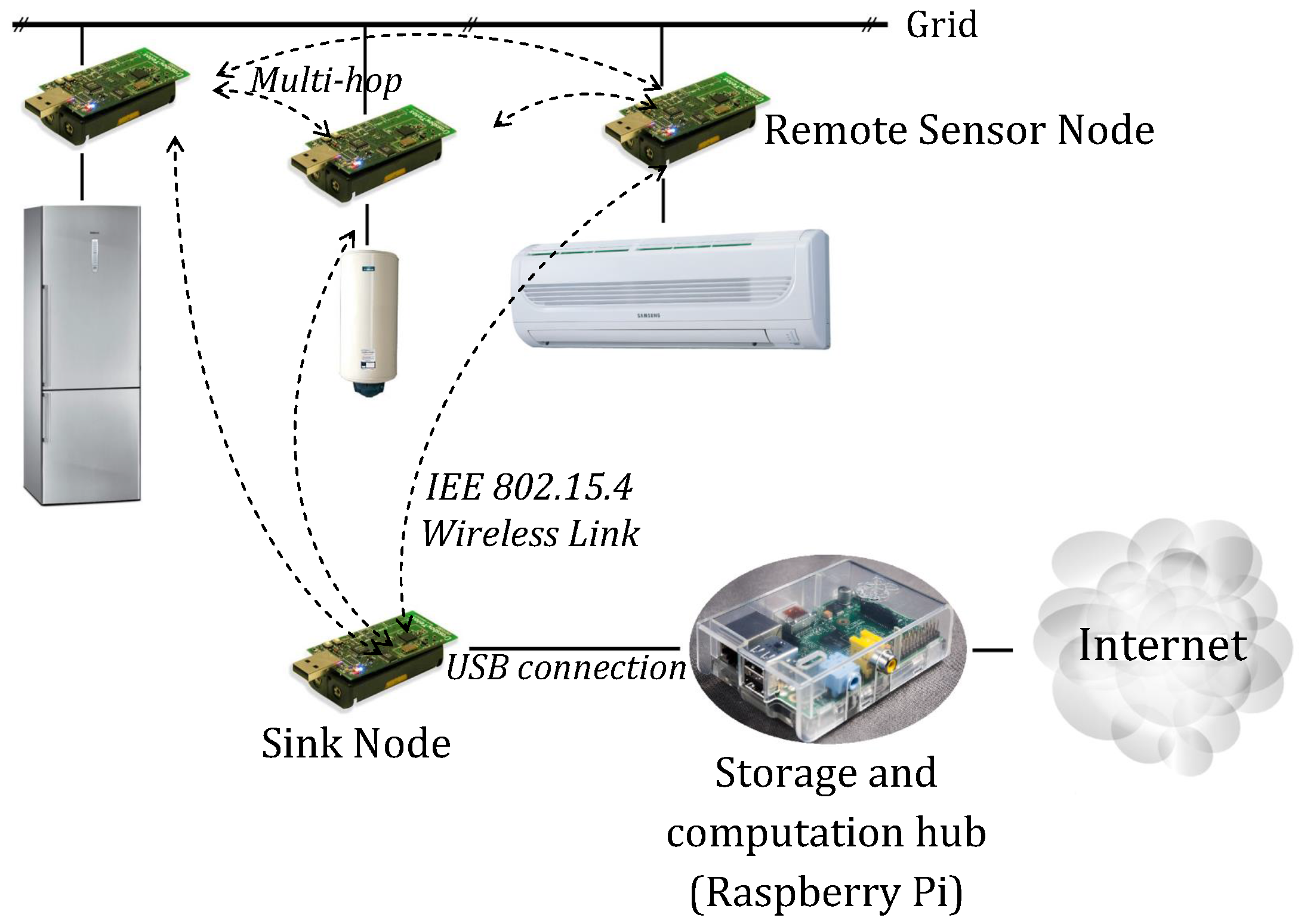
2.1. General Description
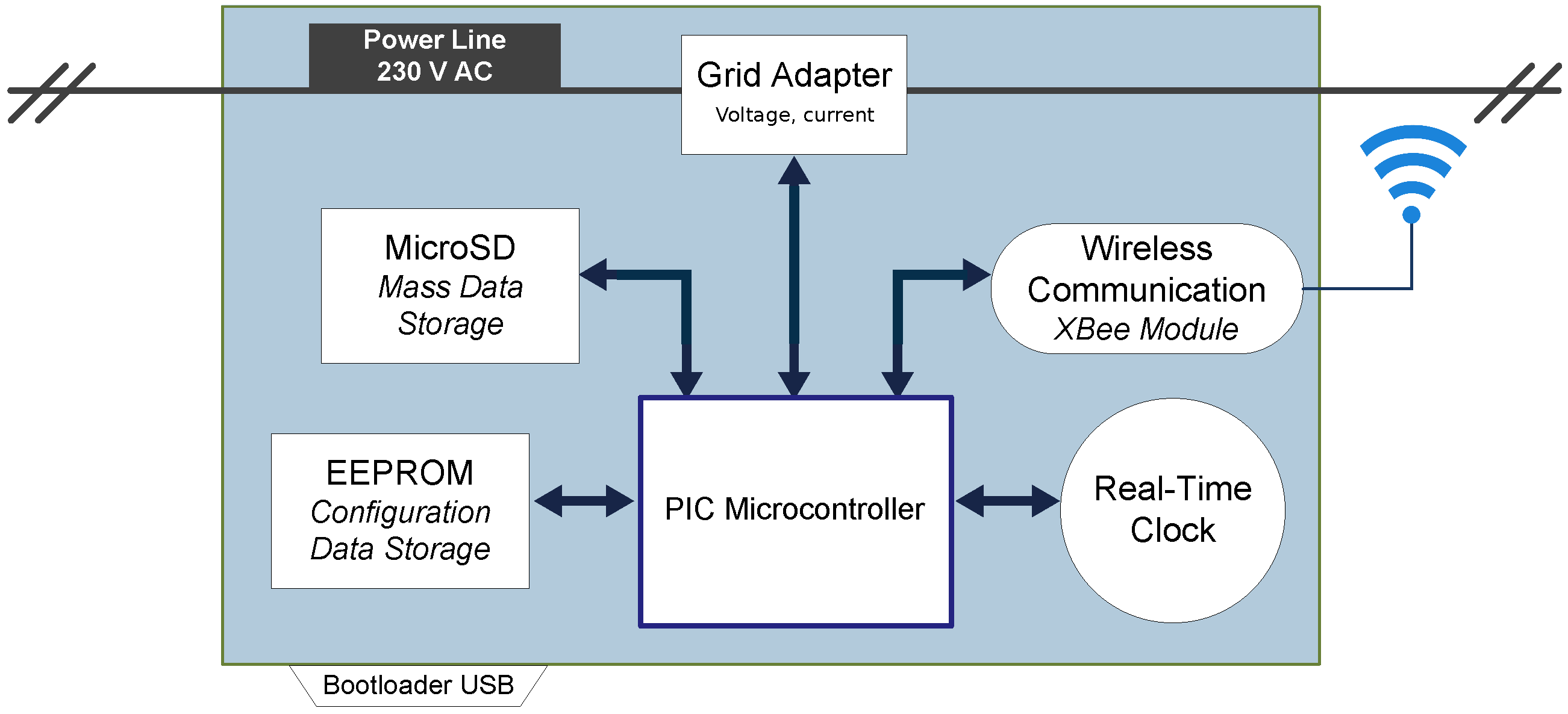
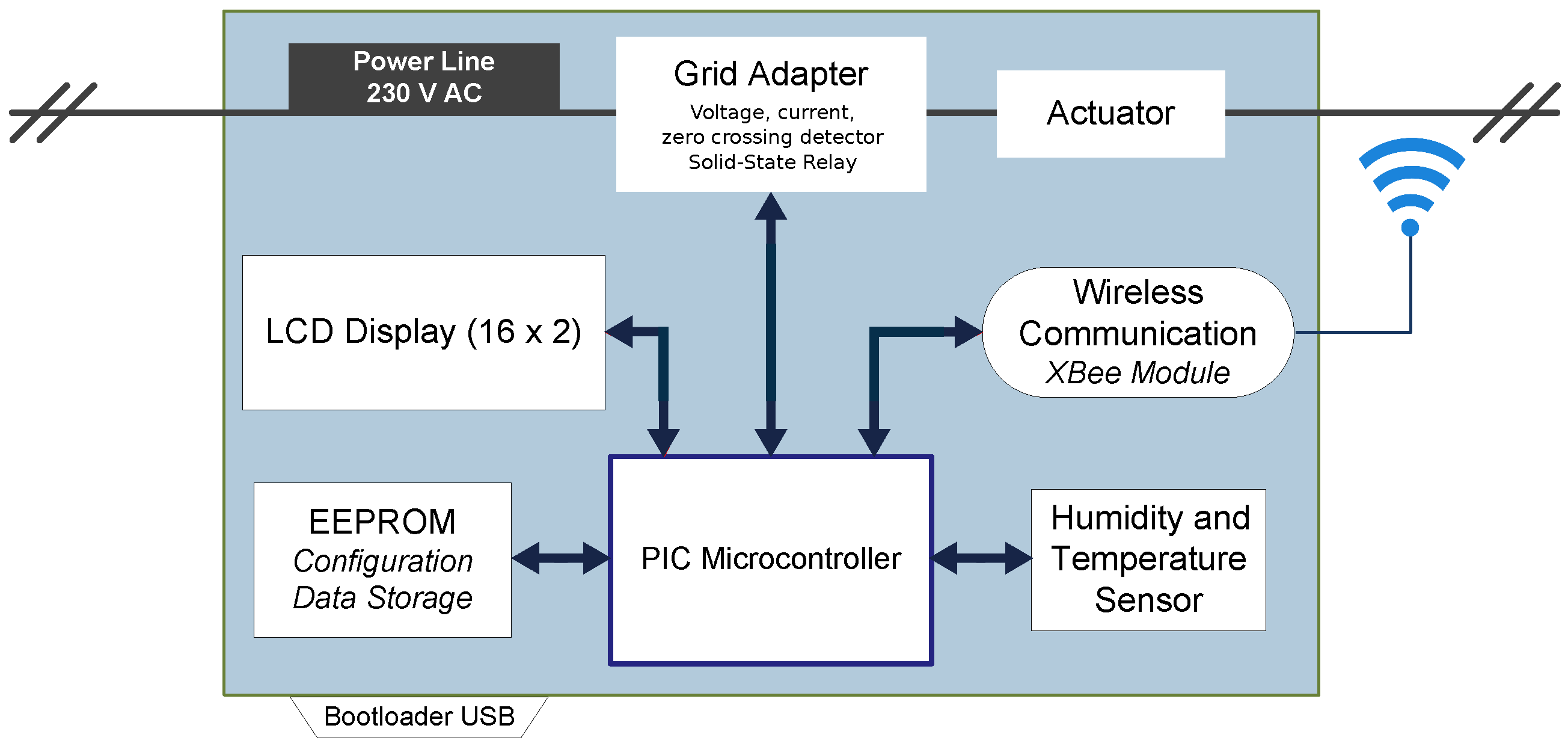
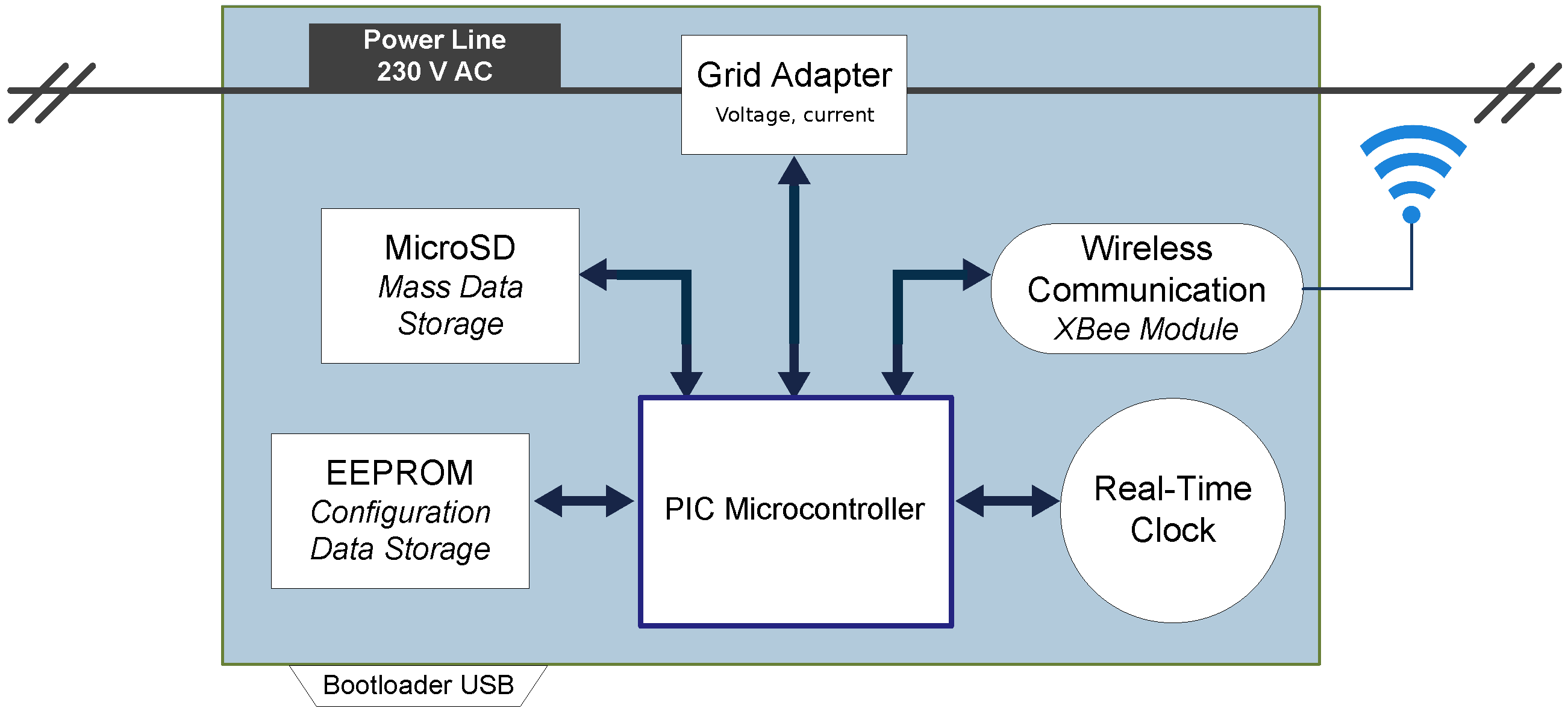
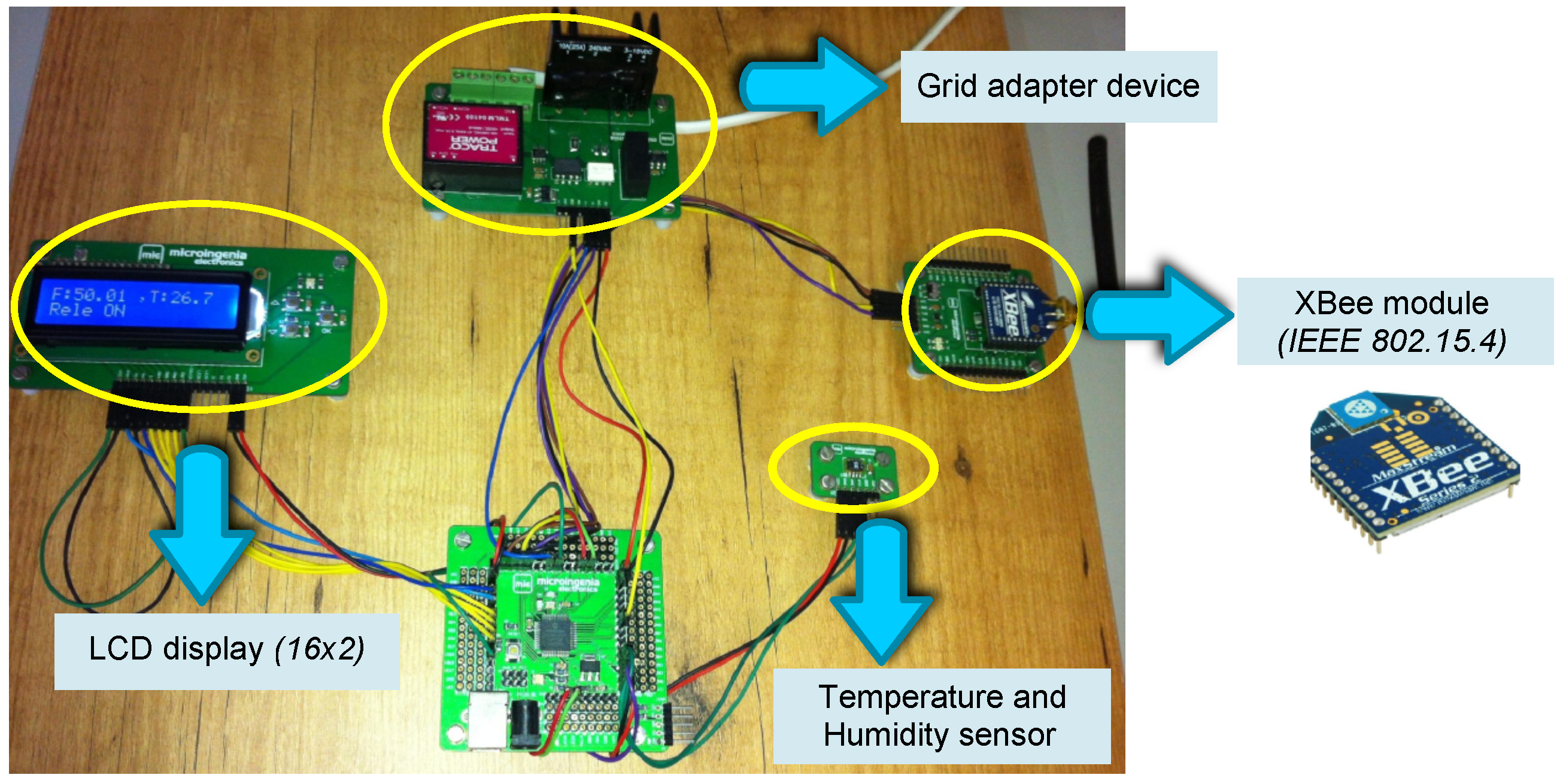
2.2. Load Controller Hardware Description
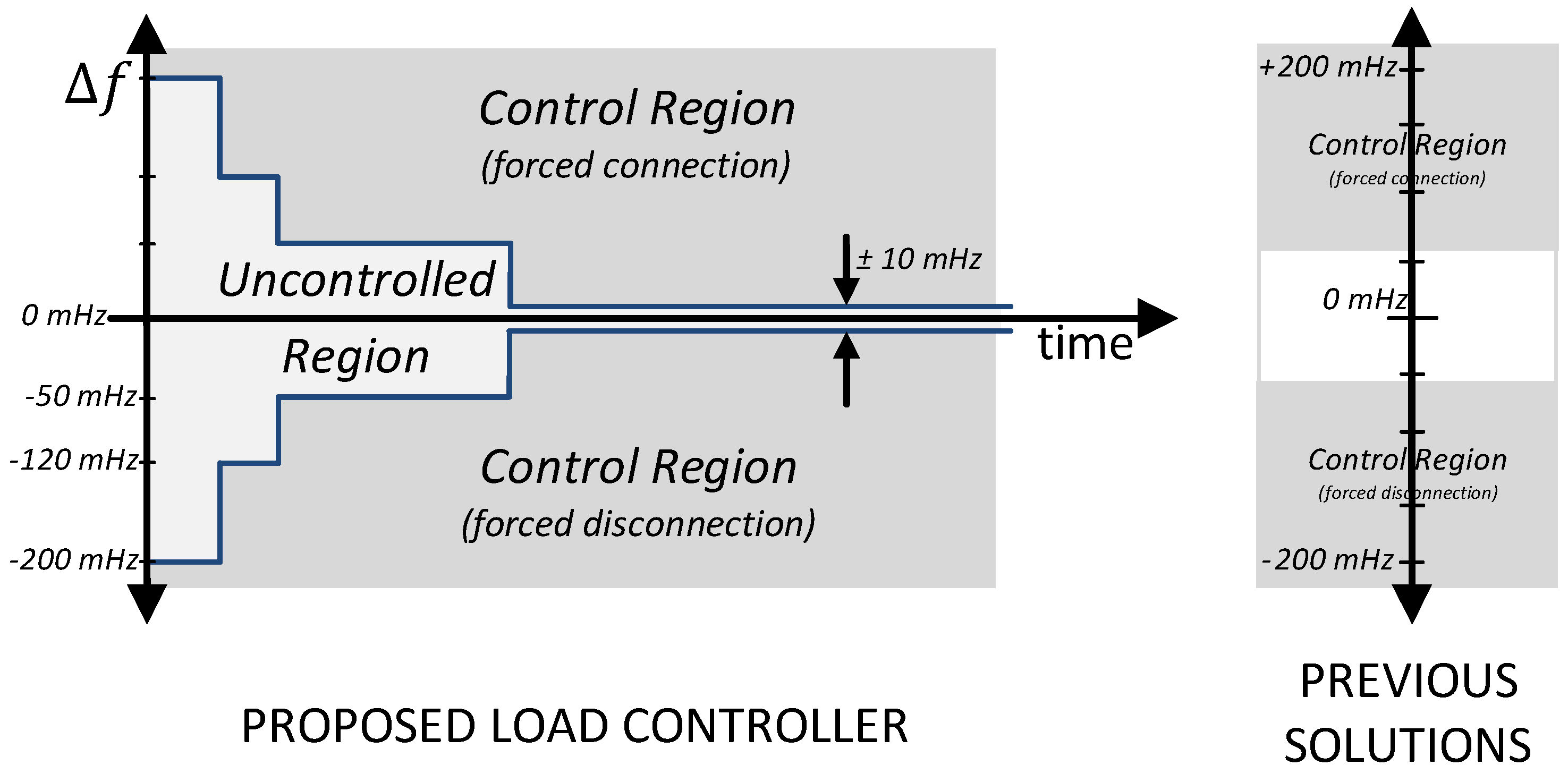
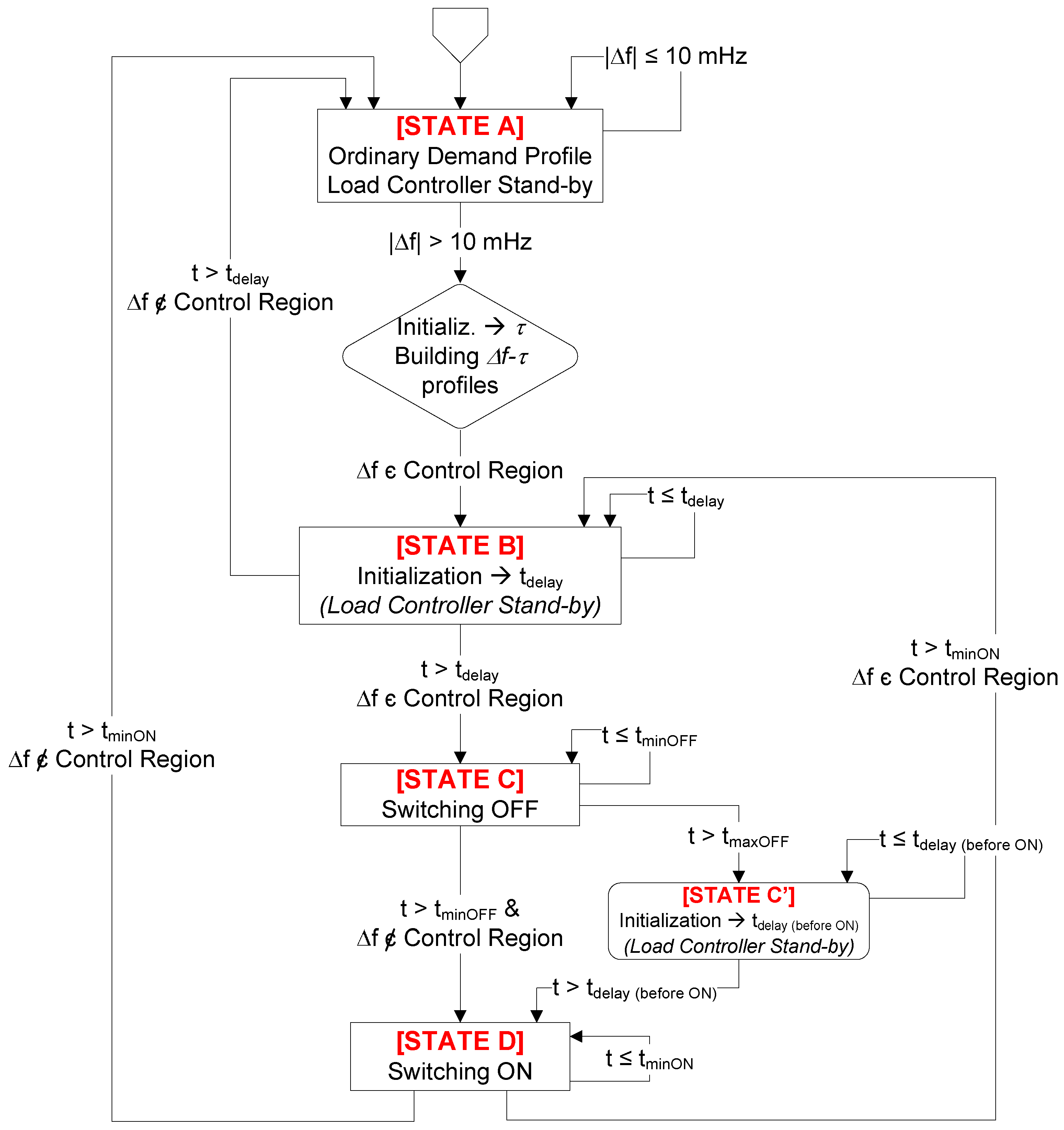
2.3. Load Controller Software Description: Frequency-Responsive Load Controller
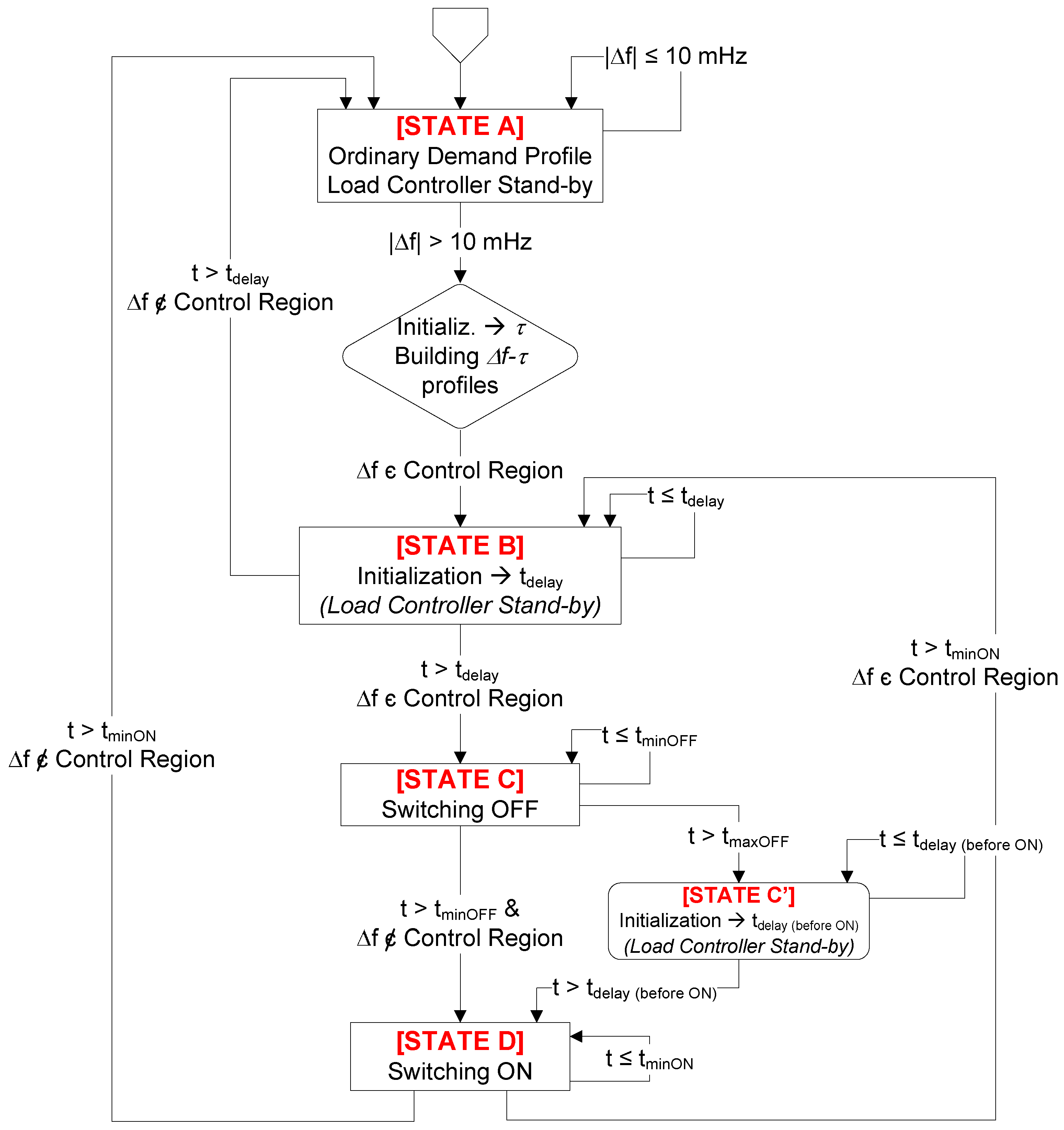
- (i)
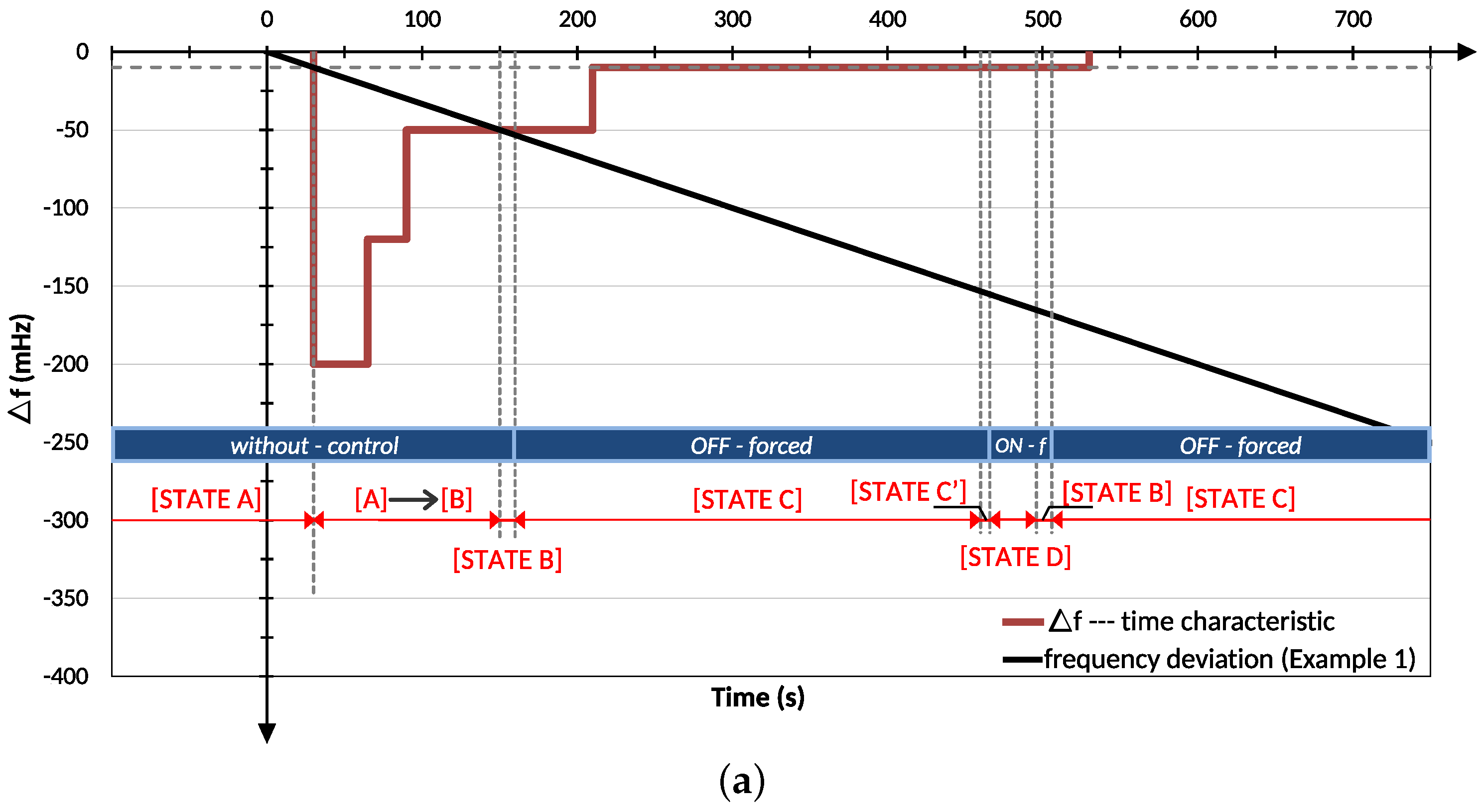
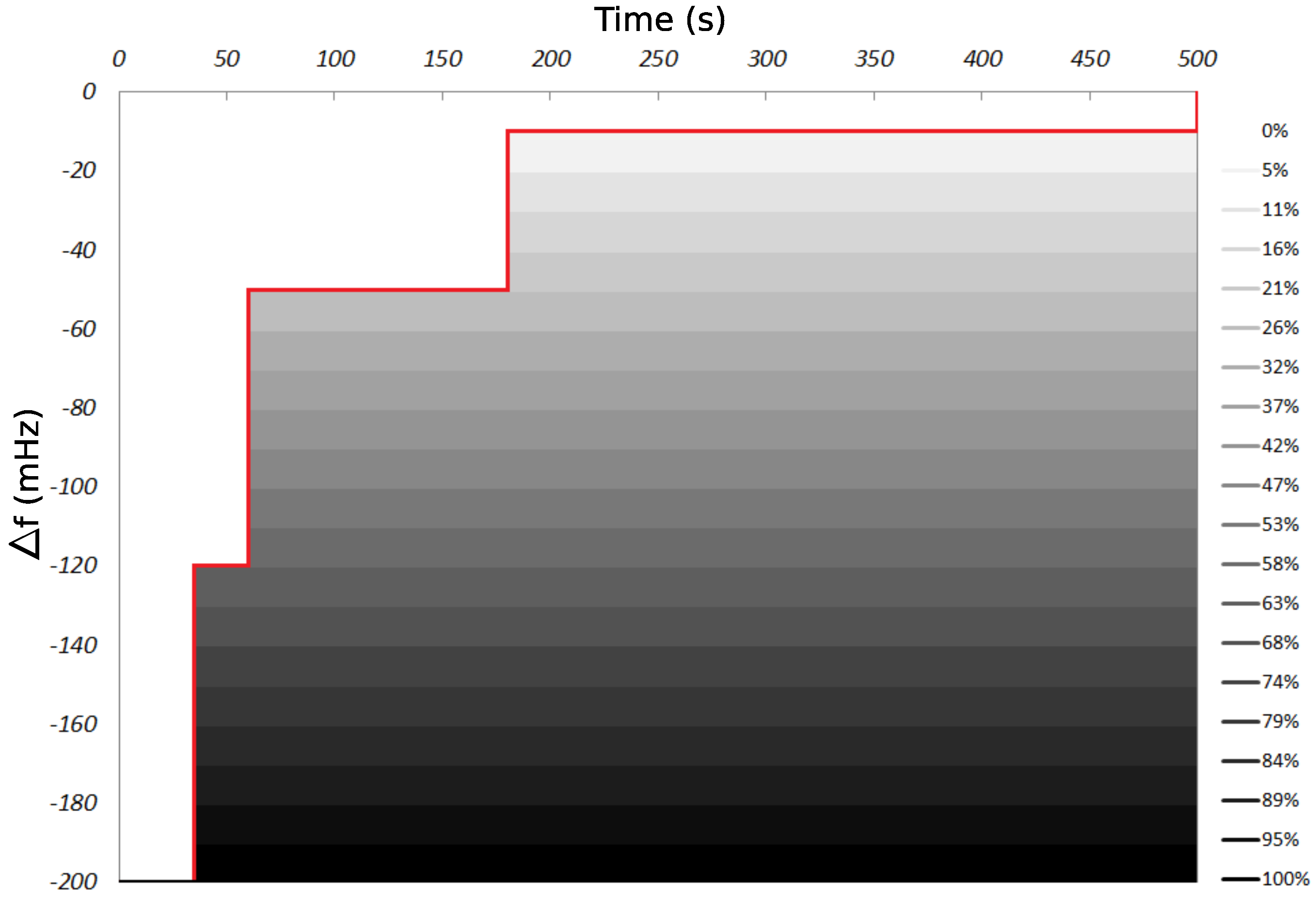
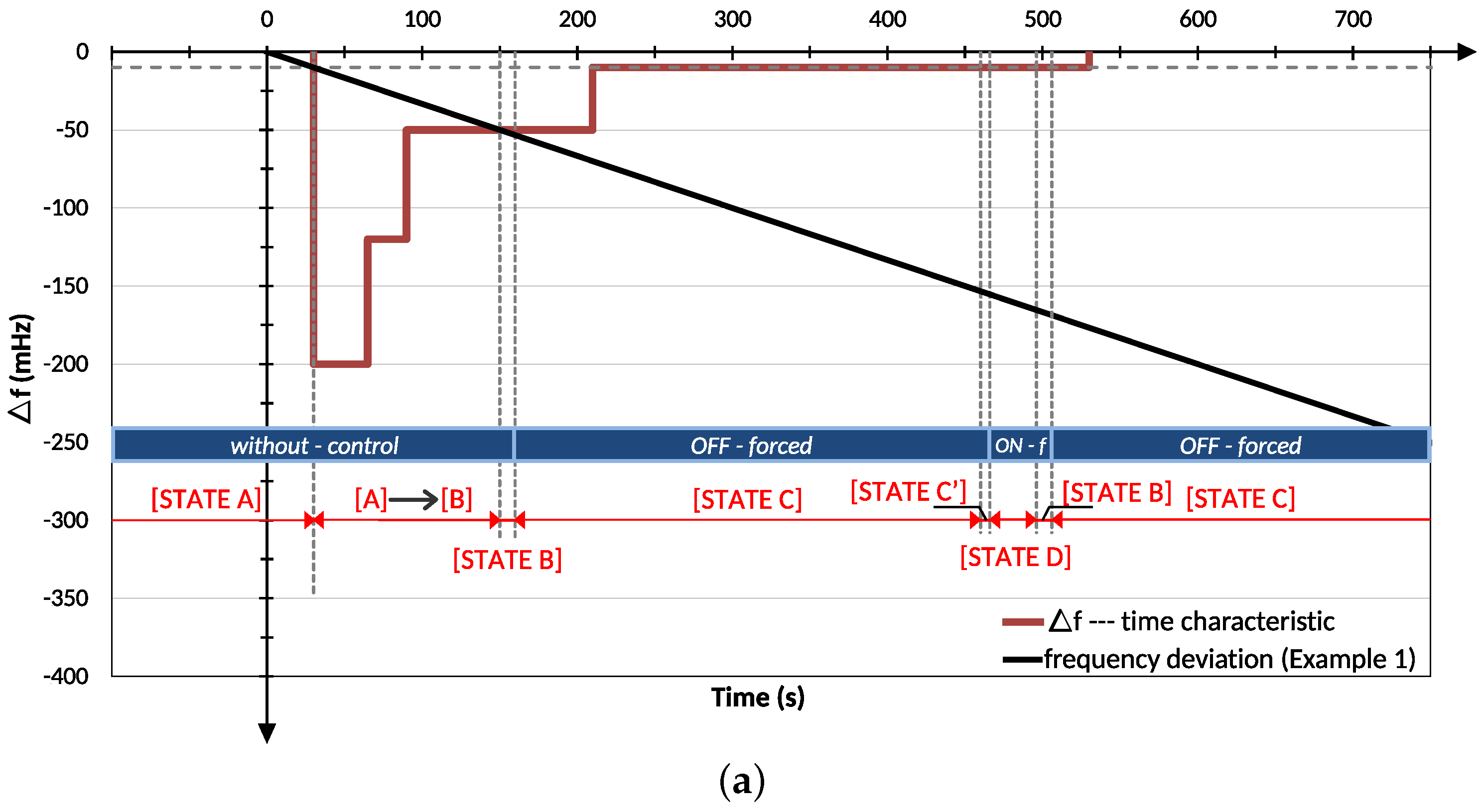
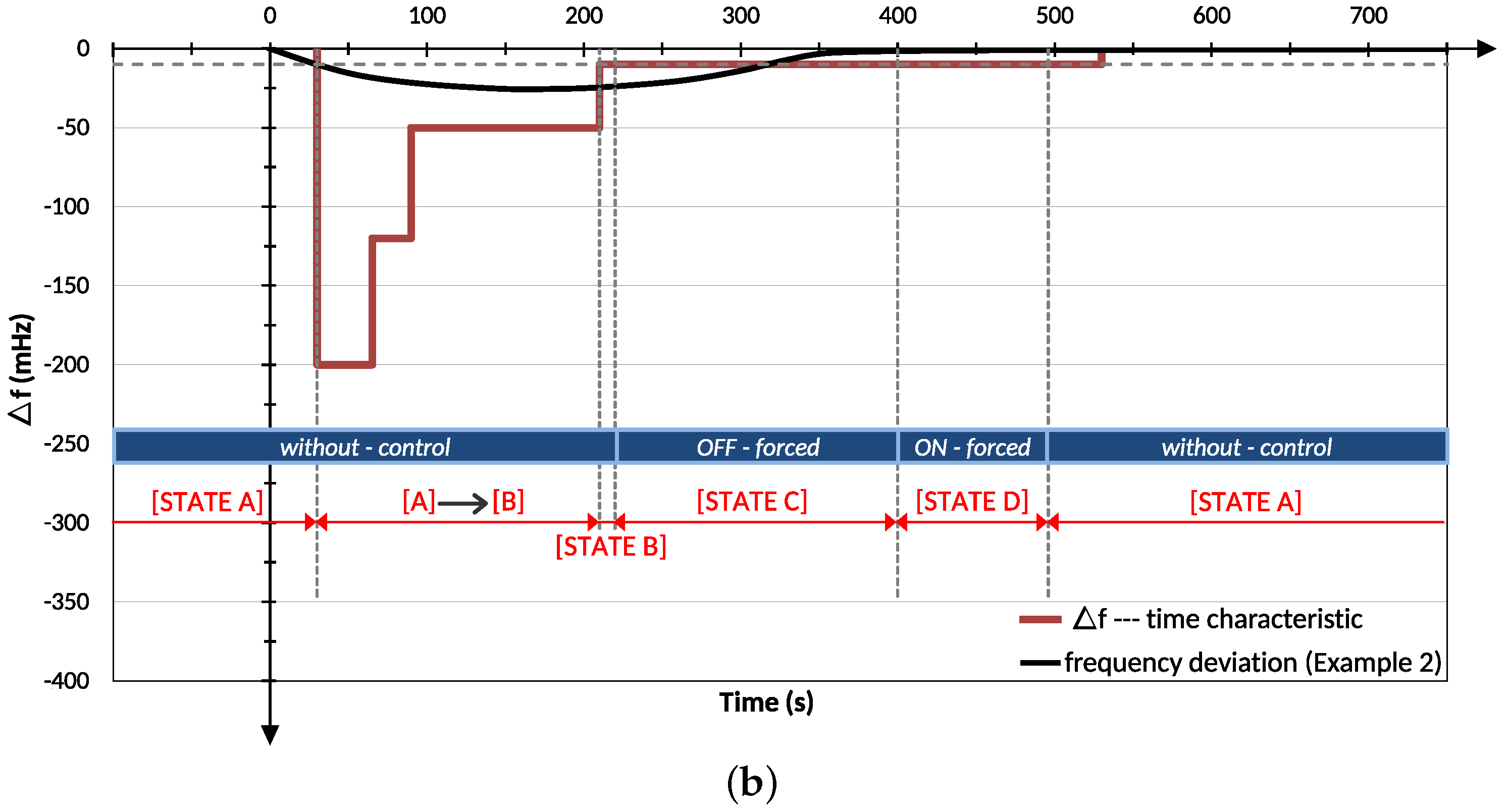
- In Figure 7a, a second off-forced time period is started (State-D → State-B), since the frequency value continues within the control region and does not recover its nominal value. In this case and after the on-forced time interval (State-D) is finished, the load controller changes the status to State-B and back to the beginning of a new off-forced time period process.
- (ii)
- In Figure 7b, by contrast, the frequency excursion has already disappeared before finishing the off-forced time interval (State-C). Subsequently, the load controller reaches its stand-by mode after the on-forced time interval (State-D), with the load following its normal operating power demand profile (State-D → State-A).
3. Results
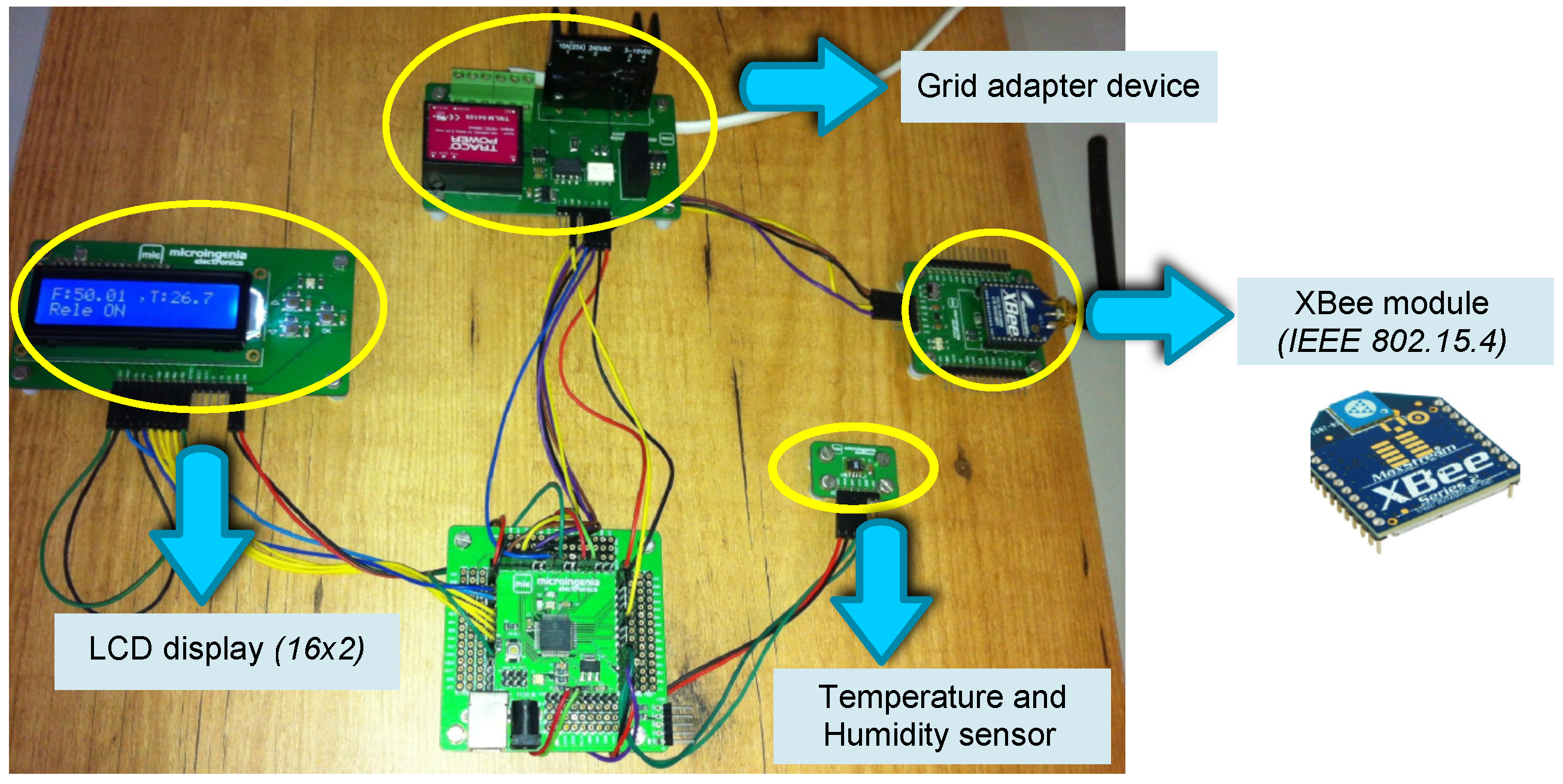
3.1. Laboratory Test Environment
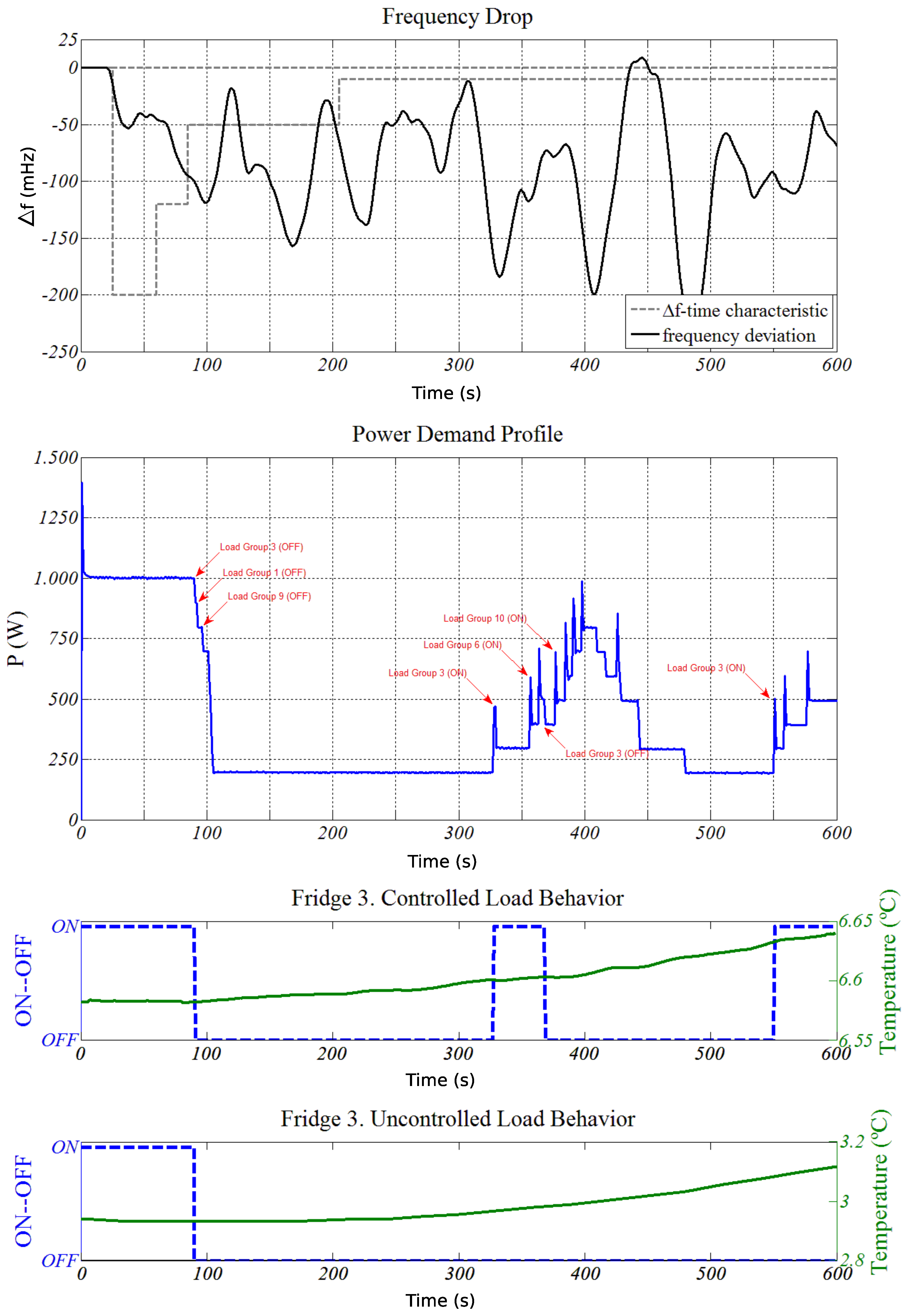
3.2. Case Studies and Results
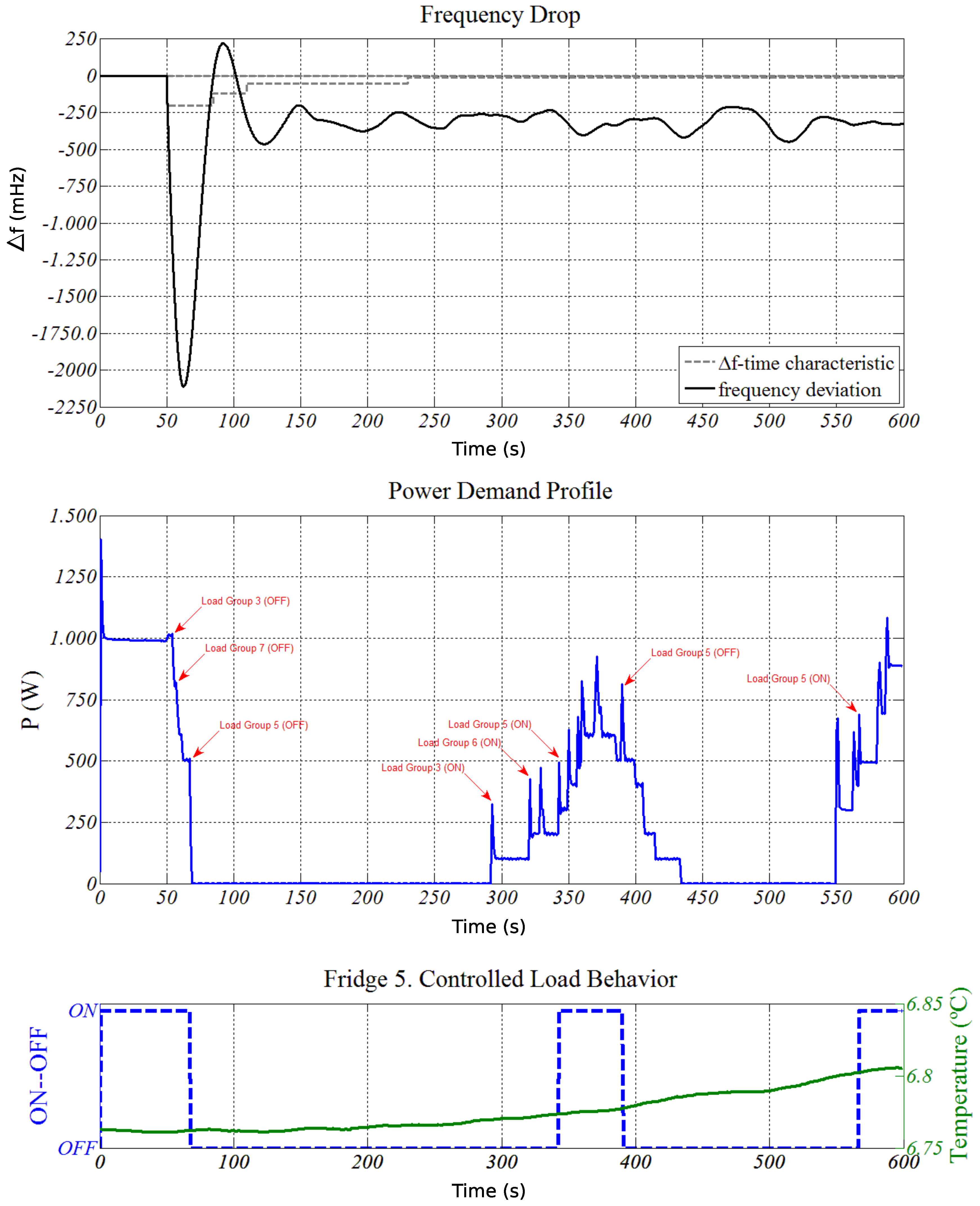
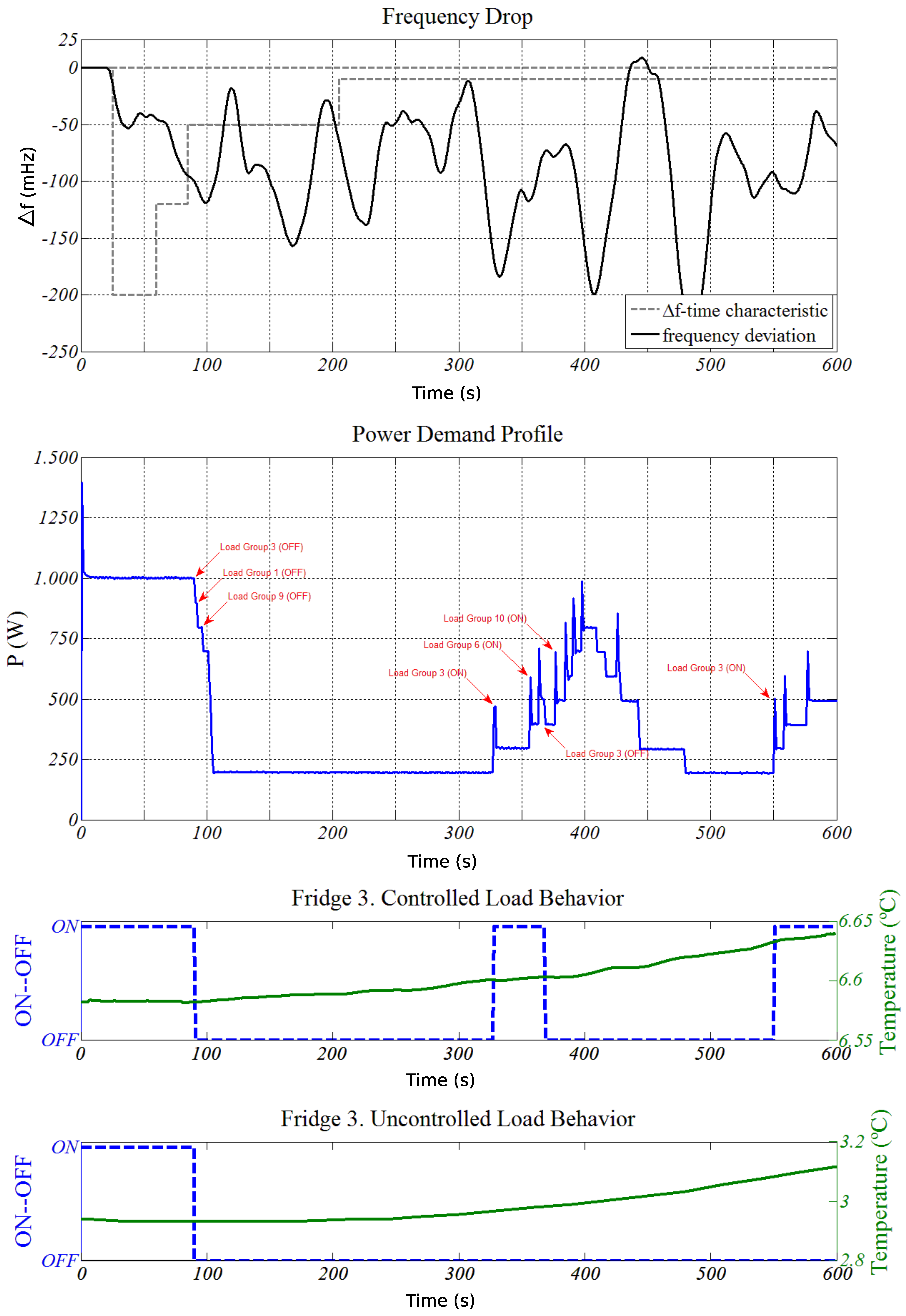
- Case Study (I): Frequency excursion due to wind power fluctuations.
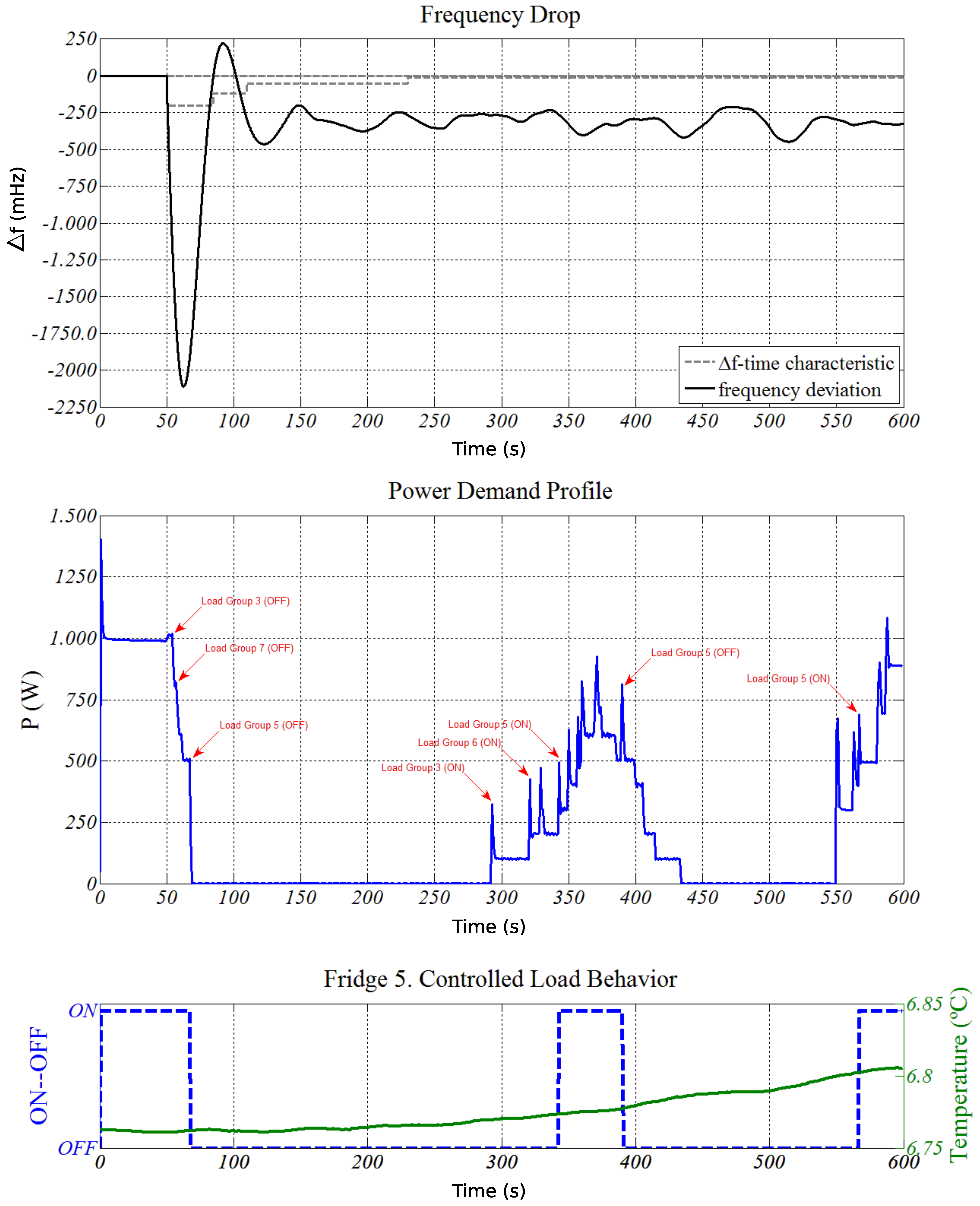
- Case Study (II): Frequency excursion due to wind power fluctuations together with a sudden loss of a hydrothermal generation unit (200 MW of power).
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hirst, E.; Kirby, B. Load as a Resource in Providing Ancillary Services; Technical Report; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 1999.
- Liu, X.; Liu, X.; Li, Z. Cyber risk assessment of transmission lines in smart grids. Energies 2015, 8, 13796–13810. [Google Scholar] [CrossRef]
- International Energy Agency. Cool Appliances—Policy Strategies for Energy Efficient Homes; International Energy Agency: Paris, France, 2003. [Google Scholar]
- Schweppe, F.C.; Tabors, R.D.; Kirtley, J.L.; Outhred, H.R.; Pickel, F.H.; Cox, A.J. Homeostatic utility control. IEEE Trans. Power Appar. Syst. 1980, PAS-99, 1151–1163. [Google Scholar] [CrossRef]
- Kirby, B.; Ally, M. Spinning Reserve from Supervisory Thermostat Control; Technical Report; Transmission Reliability Research Review; US Department of Energy: Washington DC, USA, December 2002.
- Malins, A. Demand Side Developments; Technical Report; National Grid Transco: Warwick, UK, March 2003. [Google Scholar]
- Pacific Northwest National Laboratory. Grid Friendly™ Controller Helps Balance Energy Supply and Demand; Technical Report; Pacific Northwest National Laboratory: Richland, WA, USA, 2002.
- Palensky, P.; Dietrich, D. Demand side management: Demand response, intelligent energy systems, and smart loads. IEEE Trans. Ind. Inform. 2011, 7, 381–388. [Google Scholar] [CrossRef]
- Hirst, D. Responsive Load System. UK Patent GB2361118, 2001. [Google Scholar]
- Short, F.C.; Infield, D.G.; Freris, L.L. Stabilization of Grid Frequency Through Dynamic Demand Control. IEEE Trans. Power Syst. 2007, 22, 1284–1293. [Google Scholar] [CrossRef] [Green Version]
- Autonomous Renewable Energy Systems Application of Distributed Intelligent Load Control. Available online: http://ieeexplore.ieee.org/document/828160/ (accessed on 22 January 2017).
- Pandiaraj, K.; Taylor, P.; Jenkins, N.; Robb, C. Distributed load control of autonomous renewable energy systems. IEEE Trans. Energy Convers. 2001, 16, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Trudnowski, D.; Donnelly, M.; Lightner, E. Power-system frequency and stability control using decentralized intelligent loads. In Proceedings of the 2006 IEEE PES Transmission and Distribution Conference and Exhibition, Dallas, TX, USA, 21–24 May 2006; pp. 1453–1459.
- Short, J.A.; Infield, D.G.; Freris, L.L. Stabilization of grid frequency through dynamic demand control. IEEE Trans. Power Syst. 2007, 22, 1284–1293. [Google Scholar] [CrossRef] [Green Version]
- Kondoh, J.; Aki, H.; Yamaguchi, H.; Murata, A.; Ishii, I. Consumed power control of time deferrable loads for frequency regulation. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004; pp. 1013–1018.
- Kondoh, J.; Lu, N.; Hammerstrom, D. An evaluation of the water heater load potential for providing regulation service. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–8.
- Eto, J. Demand Response Spinning Reserve Demonstration; Technical Report; Lawrence Berkeley National Laboratory (LBNL): Berkeley, CA, USA, 2007.
- Xu, Z.; Ostergaard, J.; Togeby, M. Demand as Frequency Controlled Reserve. IEEE Trans. Power Syst. 2011, 26, 1062–1071. [Google Scholar] [CrossRef] [Green Version]
- Douglass, P.J.; Garcia-Valle, R.; Nyeng, P.; Ostergaard, J.; Togeby, M. Demand as frequency controlled reserve: Implementation and practical demonstration. In Proceedings of the 2nd IEEE PES Int Innovative Smart Grid Technologies (ISGT Europe) Conference and Exhibition, Manchester, UK, 5–7 December 2011; pp. 1–7.
- Samarakoon, K.; Ekanayake, J. Demand side primary frequency response support through smart meter control. In Proceedings of the 2009 44th International Universities Power Engineering Conference (UPEC), Glasgow, UK, 1–4 September 2009; pp. 1–5.
- Vijayananda, W.M.T.; Samarakoon, K.; Ekanayake, J. Development of a demonstration rig for providing primary frequency response through smart meters. In Proceedings of the 45th International Universities Power Engineering Conference (UPEC), Cardiff, UK, 31 August–3 September 2010; pp. 1–6.
- Samarakoon, K.; Ekanayake, J.; Jenkins, N. Investigation of domestic load control to provide primary frequency response using smart meters. IEEE Trans. Smart Grid 2012, 3, 282–292. [Google Scholar] [CrossRef]
- Wang, Q.; Tang, Y.; Li, F.; Li, M.; Li, Y.; Ni, M. Coordinated scheme of under-frequency load shedding with intelligent appliances in a cyber physical power system. Energies 2016, 9, 630. [Google Scholar] [CrossRef]
- Molina-García, A.; Bouffard, F.; Kirschen, D. Decentralized demand side contribution to primary frequency control. IEEE Trans. Power Syst. 2011, 26, 411–419. [Google Scholar] [CrossRef]
- Liu, S.; Liu, X.P.; Saddik, A.E. Modeling and distributed gain scheduling strategy for load frequency control in smart grids with communication topology changes. ISA Trans. 2014, 53, 454–461. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Liu, P.X.; Saddik, A.E. Modeling and stability analysis of automatic generation control over cognitive radio networks in smart grids. IEEE Trans. Syst. Man. Cybern. Syst. 2015, 45, 223–234. [Google Scholar]
- IEEE Standard Association. 802.15.4e-2012—IEEE Standard for Local and Metropolitan Area Networks—Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs); IEEE Standard Association: Piscataway, NJ, USA, 2012. [Google Scholar]
- Sensirion. Sht1x/sht7x. Sensirion Humidity and Temperature Sensors. Available online: http://www.sensirion.com (accessed on 22 January 2017).
- Hirst, D. Grid Stabilising System. U.S. Patent 20,070,198,133, 23 August 2007. [Google Scholar]
- Union for the Coordination of the Transmission of Electricity. P1–Policy 1: Load-Frequency Control and Performance. Technical Report. 2002. Available online: https://www.entsoe.eu/news-events/former-associations/ ucte/Pages/default.aspx (accessed on 22 January 2017).
- O’Sullivan, C.T. Newton’s law of cooling—A critical assessment. Am. J. Phys. 1990, 58, 956–960. [Google Scholar] [CrossRef]
- Bohren, C.F. Comment on “Newton’s law of cooling—A critical assessment”, by Colm T. O’Sullivan [Am. J. Phys. 58, 956–960 (1990)]. Am. J. Phys. AMER 1991, 59, 1044–1046. [Google Scholar] [CrossRef]
- Vollmer, M. Newton’s law of cooling revisited. Eur. J. Phys. 2009, 30, 1063. [Google Scholar] [CrossRef]
- Telecommunications: Glossary of Telecommunication Terms; Federal Standard 1037C; Prepared by National Communications System Technology and Standards Division; Institute for Telecommunication Sciences: Boulder, CO, USA, 1996.
- Sørensen, P.; Cutululis, N.; Vigueras-Rodríguez, A.; Madsen, H.; Pinson, P.; Jensen, L.; Hjerrild, J.; Donovan, M. Modelling of power fluctuations from large offshore wind farms. Wind Energy 2008, 11, 29–43. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill Professional Publishing: New York, NY, USA, 1994. [Google Scholar]
- Molina-García, A.; Muñoz Benavente, I.; Hansen, A.; Gomez-Lazaro, E. Demand-side contribution to primary frequency control with wind farm auxiliary control. IEEE Trans. Power Syst. 2014, 29, 2391–2399. [Google Scholar] [CrossRef]
- UCTE Operation Handbook, Version 2.5. Available online: https://www.scribd.com/document/175808629/UCTE-Operation-Handbook (accessed on 22 January 2017).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Group No. | Case Study (I) ON/OFF | Case Study (II) ON/OFF | ||||
|---|---|---|---|---|---|---|
| 1 | 7 | 200 | 292 | 28 | ON | ON |
| 2 | 19 | 186 | 321 | 24 | ON | ON |
| 3 | 5 | 175 | 238 | 33 | ON | ON |
| 4 | 17 | 180 | 289 | 32 | ON | ON |
| 5 | 17 | 175 | 275 | 30 | ON | ON |
| 6 | 18 | 148 | 253 | 30 | ON | ON |
| 7 | 6 | 175 | 315 | 28 | ON | OFF |
| 8 | 11 | 165 | 308 | 33 | ON | OFF |
| 9 | 9 | 162 | 301 | 30 | ON | ON |
| 10 | 17 | 159 | 260 | 28 | ON | ON |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñoz-Benavente, I.; Gómez-Lázaro, E.; García-Sánchez, T.; Vigueras-Rodríguez, A.; Molina-García, A. Implementation and Assessment of a Decentralized Load Frequency Control: Application to Power Systems with High Wind Energy Penetration. Energies 2017, 10, 151. https://doi.org/10.3390/en10020151
Muñoz-Benavente I, Gómez-Lázaro E, García-Sánchez T, Vigueras-Rodríguez A, Molina-García A. Implementation and Assessment of a Decentralized Load Frequency Control: Application to Power Systems with High Wind Energy Penetration. Energies. 2017; 10(2):151. https://doi.org/10.3390/en10020151
Chicago/Turabian StyleMuñoz-Benavente, Irene, Emilio Gómez-Lázaro, Tania García-Sánchez, Antonio Vigueras-Rodríguez, and Angel Molina-García. 2017. "Implementation and Assessment of a Decentralized Load Frequency Control: Application to Power Systems with High Wind Energy Penetration" Energies 10, no. 2: 151. https://doi.org/10.3390/en10020151