1. Introduction
Humans are currently faced with serious energy and environmental challenges, so it has become all the more urgent to change the traditional constitution of energy sources. Adopting clean, renewable energy such as wind power is critical. Compared with onshore winds, worldwide offshore wind resources have proved to be more abundant and consistent, less visual, noise annoyance and variability on market price [
1,
2]. It is estimated that offshore wind could contribute to nearly 5.5% of the world’s electricity by the year 2050 [
3]. Hence, offshore wind energy is becoming one of the most promising sources of renewable energy. The current bottom-fixed offshore wind turbines have only seen limited deployment to water depths of 30 m [
4]. Beyond that range, construction costs will surge. Recently, the development of floating offshore wind turbine (FOWT) technology is making deep water wind energy exploitation realizable.
Learning from the experience developed in the offshore oil and gas industry, four types of floating foundation are available for FOWTs, i.e., spar-buoys, semi-submersible, barges and tension leg platform (TLP). Some full-scale prototype FOWTs have been tested at sea: the spar-type Hywind [
5] with a 2.3 MW wind turbine was installed in 2009; the semi-submersible WindFloat [
6] equipped with a 2 MW wind turbine was launched in 2011; one spar-type and two semi-submersible floating wind turbines were built with support from the Fukushima Offshore Wind Farm Demonstration Project [
7] from 2011 to 2016. Due to its good site-adaptability and easy installation [
8], the triangular semi-submersible foundation, which is generally composed of three outer columns, has been adopted by most of these existing full-scale FOWTs, such as Windfloat [
6], Fukushima Mirai and Shimpuu [
7]. However, the non-fully-symmetrical shape makes the semi-submersible FOWT sensitive to wind/wave direction. The stability and hydrodynamic characteristics can be different along with wind/wave headings, ultimately resulting in different dynamic responses. Hence, a better understanding of directionality effects on the semi-submersible FOWT will be beneficial to mitigate loadings and improve power generation efficiency.
Scale model tests and numerical simulations are two major ways for the FOWT dynamics research. Although it is quite expensive to conduct wave flume/basin tests, it should be noted that it is the only validated approach to capture the strongly nonlinear phenomena in complex ocean environment except full-scale tests [
9]. The purposes for the existing semi-submersible FOWT model tests can be categorized into two groups [
10]. The first group is to validate numerical simulations. Roddier et al. [
6] conducted a 1/105 scale model of the WindFloat platform to test the validity of the numerical simulations performed with TIMEFLOAT. Coulling et al. [
11] validated the DeepCwind OC4 semi-submersible FOWT model [
12] established in the floating wind turbine simulator FAST [
13] with the 1/50th-scale model test data. The second one is to investigate the dynamic response of the FOWT system with specific features. Michailides et al. [
14] and Gao et al. [
15] examined the functionality of a semi-submersible wind energy and flap-type wave energy converter (SFC) through a 1/50th scale physical model. Chen and Hu [
16] investigated the aerodynamics-induced dynamic characteristics of OC4 semi-submersible FOWT model by a 1/50th scale model. Valuable information had been concluded from these model tests. However, only one load direction was employed in these tests, while wind/wave directions are always changeable in real offshore conditions. Up until now, numbered tests had been carried out with different wind/wave directions [
17], but the discussions on realistic dynamics performance of the semi-submersible FOWTs under different load directions are scarce and remain unclear.
Numerical simulations are economical and informative, serving as a good complement of scale model tests. In general, the numerical approach used for FOWT dynamics analysis is based on the hybrid frequency and time domain method [
18]. The hydrodynamic coefficients such as added mass, radiation damping and wave excitation forces are obtained through a potential flow solver in frequency domain and then transferred to time domain through retardation functions or Fourier transform [
19]. At the same time, the aerodynamic forces from wind turbine and mooring line forces are calculated based on Blade Element Momentum theory (BEM)/Generalize Dynamic Wake theory (GDW) [
20] and quasi-static method [
21]/lumped-mass approach [
22] respectively. Ultimately, through multi-body dynamics analysis [
23], the coupled dynamic responses can be obtained. This analysis approach has been utilized by the FOWT numerical codes such as FAST [
13] and SIMO-RIFLEX-AeroDyn [
24].
With the aid of this numerical approach, the wind-wave directionality effects on FOWTs have been discussed in the previous studies. Philippe et al. [
25,
26] compared the motion Response Amplitude Operators (RAOs) of the MIT/NREL Shallow Drafted Barge (SDB) [
27] in five wave directions relative to wind. They found that the largest surge, heave, pitch motions and the smallest sway, roll, yaw motions occurred in the aligned wind and wave condition, while an opposite trend was observed during 90° misalignment conditions. Using a more sophisticated time domain numerical model, Ramachandran et al. [
28] reported a similar trend according to the effects of wind and wave load direction on a TLP FOWT. Barj et al. [
29,
30] discovered that although including the misaligned wind and wave conditions will be helpful to improve the estimation of extreme and fatigue loads, the highest extreme and fatigue loads for most structure locations are inclined to occur in the aligned wind and wave conditions. However, these findings are specific to the spar-type FOWT. More generally, Bachynski et al. [
31] investigated the motions and tower base fatigue loads of four kinds of offshore foundations, i.e., a spar, a tension leg platform and two semi-submersible platforms, in aligned as well as misaligned conditions. The literature demonstrated that the motions would be slightly increased in several misaligned conditions, but the largest tower base fatigue damages were caused by the aligned wind and wave conditions. In addition, Bachynski et al. compared the tower base fatigue damages of a semi-submersible FOWT in two aligned wind and wave directions. Karimirad et al. [
32] also found that there was no visible adverse impact of the misaligned conditions on the motions, tension of mooring lines and power production of a V-shaped semi-submersible FOWT system under operational conditions.
These published works mainly focused on the impact of wind and wave misalignment, but most conclusions indicate that the aligned wind and wave conditions are usually more important, particularly on the occasions of the highest extreme loads. However, up to now, numerical studies on the effects of aligned wind and wave from different directions on the non-fully-symmetrical semi-submersible FOWT are very scarce. In addition, the main causes of the directionality effects, which are essential to make a comprehensive understanding of these phenomena, have not been discussed by the aforementioned studies.
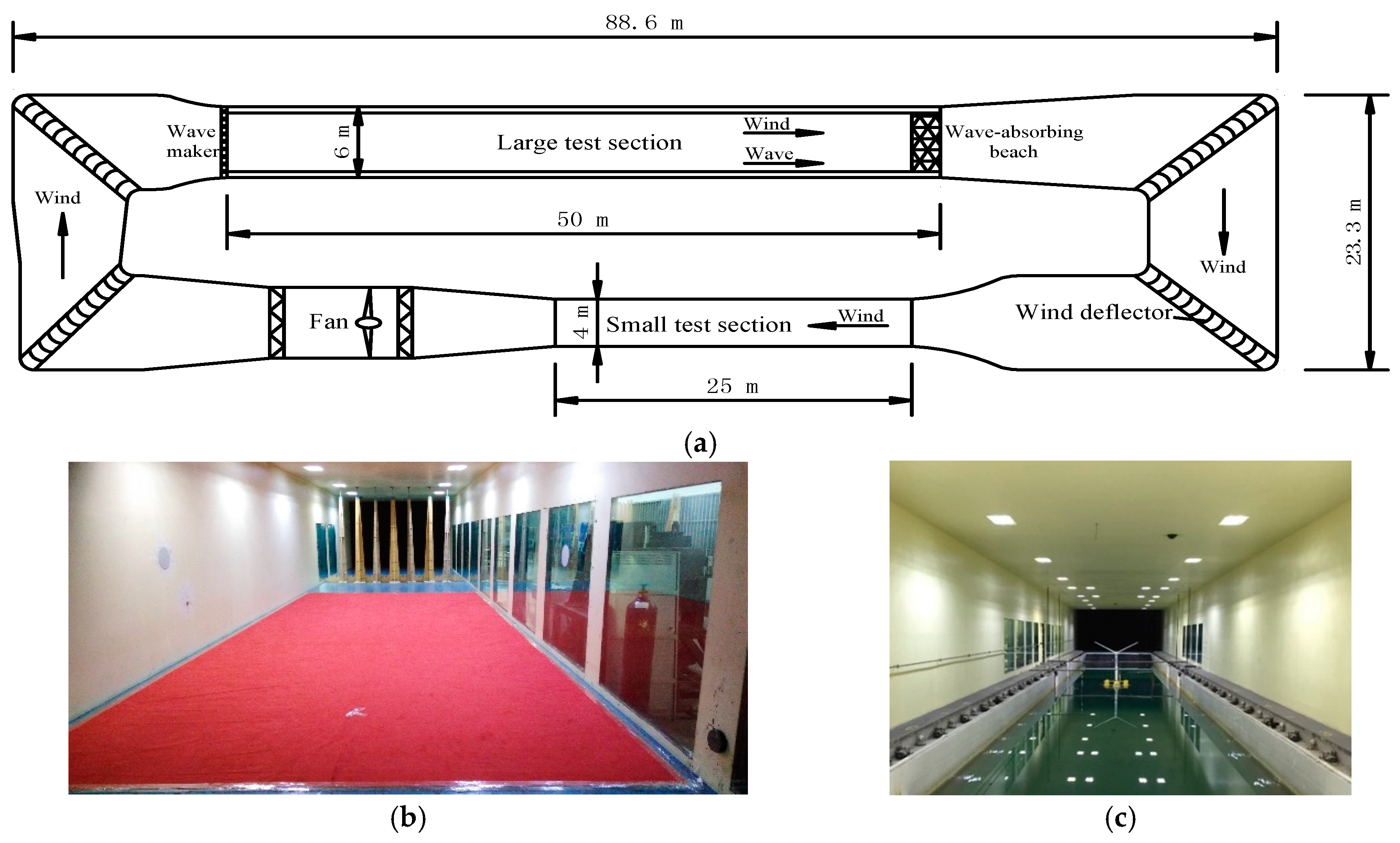
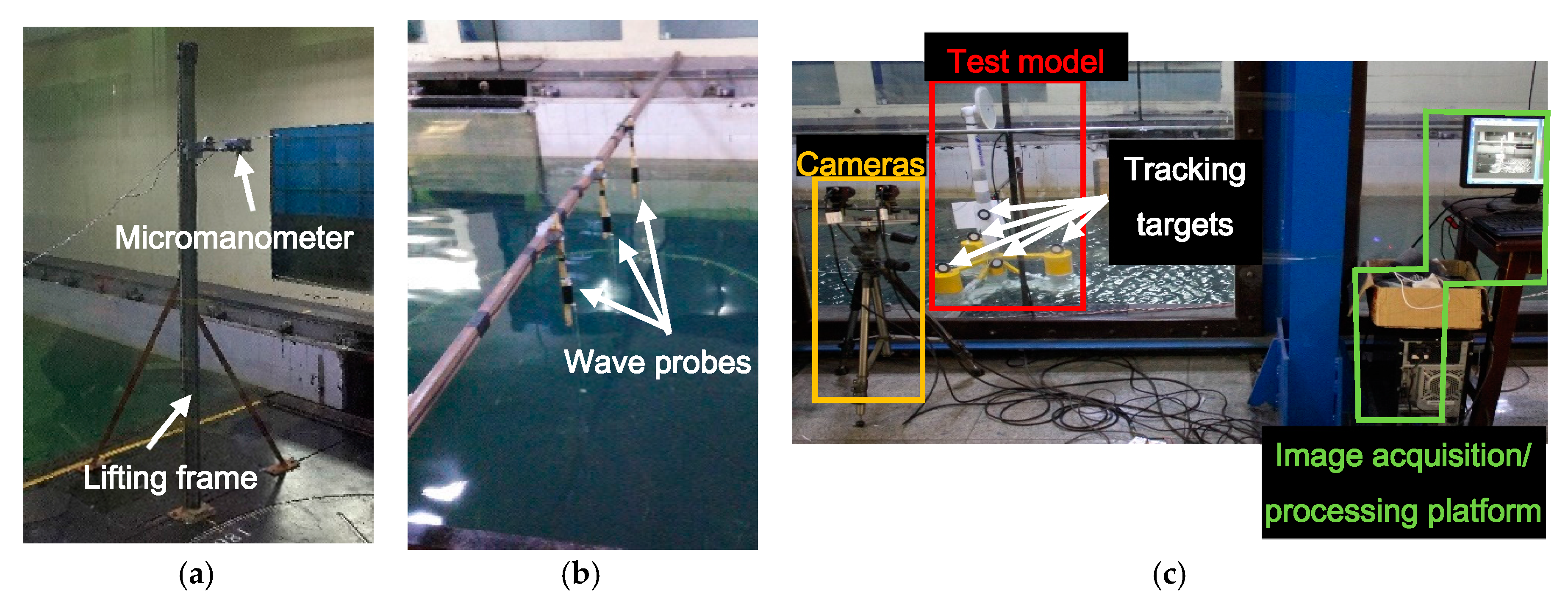
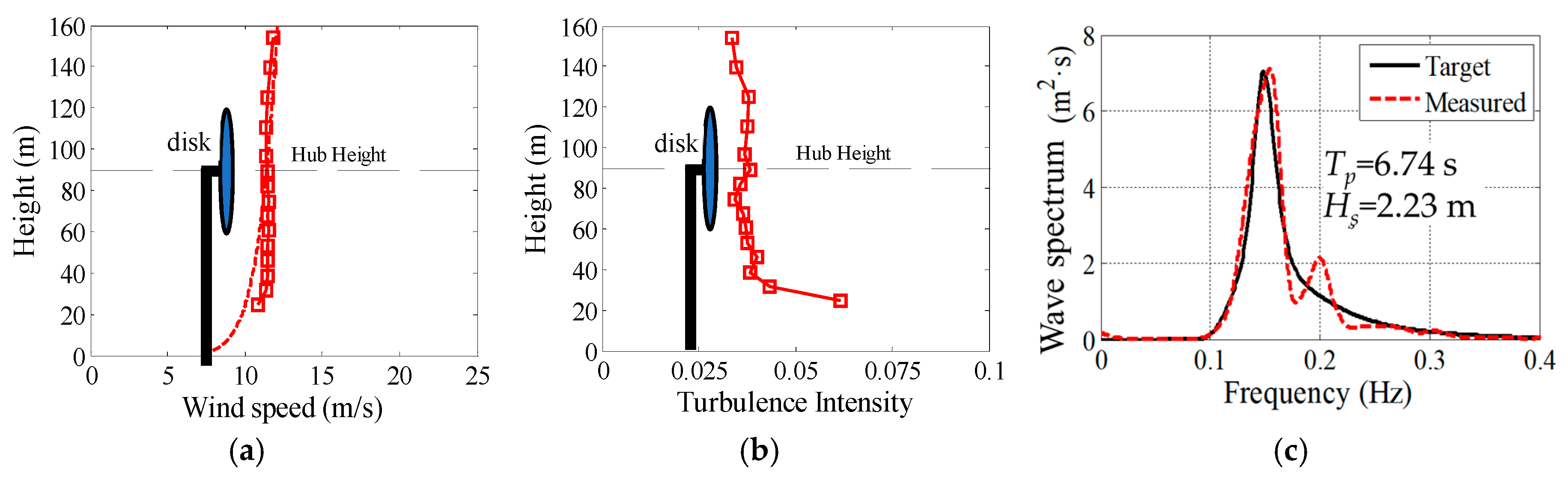
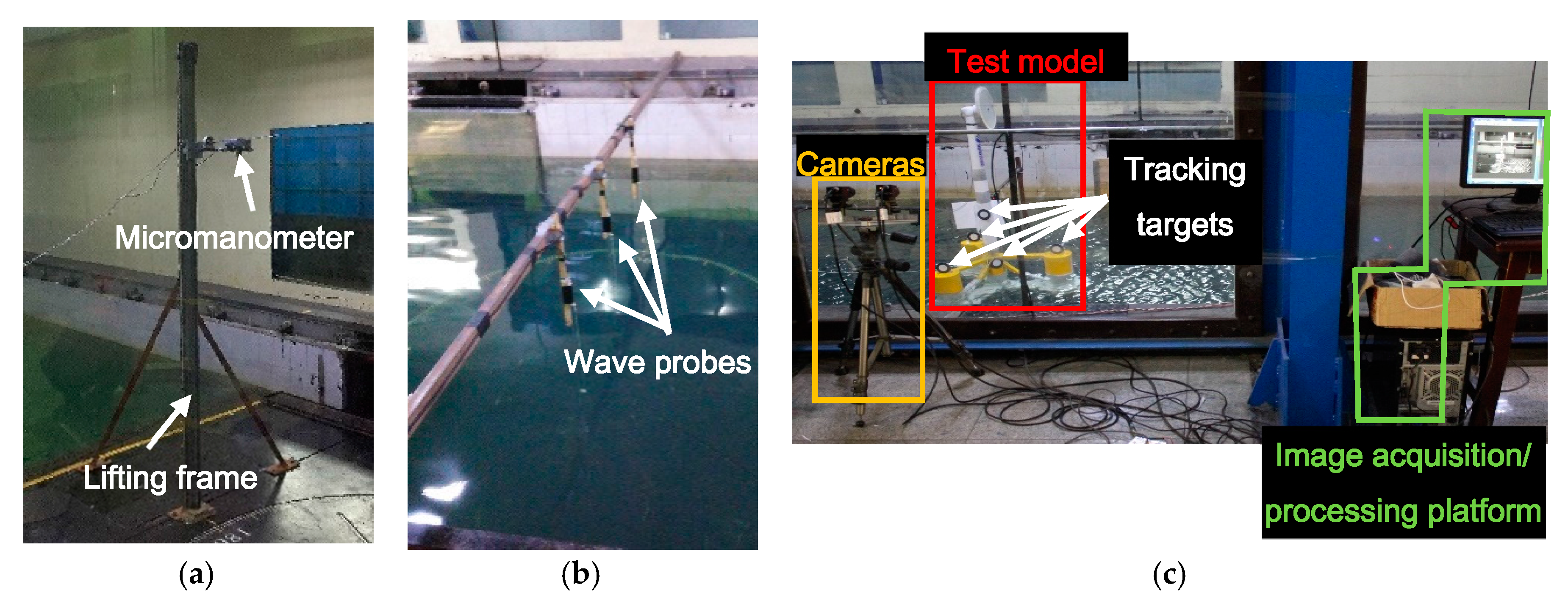
The aim of this paper is to uncover the phenomena and mechanism for the performance of a Y-shape semi-submersible FOWT attacked by multiple aligned wind and wave headings. The Y-shape semi-submersible platform refers to the floater composed of four columns, with a central column connected with three outer columns. First of all, 1/60th scale model tests in three load directions are carried out to reproduce the physical reality. The Y-shape semi-submersible FOWT model, environmental conditions and measurement are designed and calibrated carefully in a high quality joint wind tunnel and wave flume (WTWF) laboratory. Subsequently, the corresponding numerical model is established and validated with the test data. The dynamic responses such as tower base fore-aft bending moment and nacelle acceleration, which are not measured in the tests, are analyzed in the consideration of the load directionality effects. Additionally, the numerical results for different load directions are compared so as to find out the main causes of the load directionality effects. The results demonstrate that the platform motions are different between wave headings, further giving rise to a large difference in tower base loads and nacelle acceleration. Therefore, it is crucial to premeditate the load directionality effects before installation at sea, which can be beneficial for the power generation efficiency and safety of the FOWT system.
2. The Specification of the Semi-Submersible Floating Wind Turbine
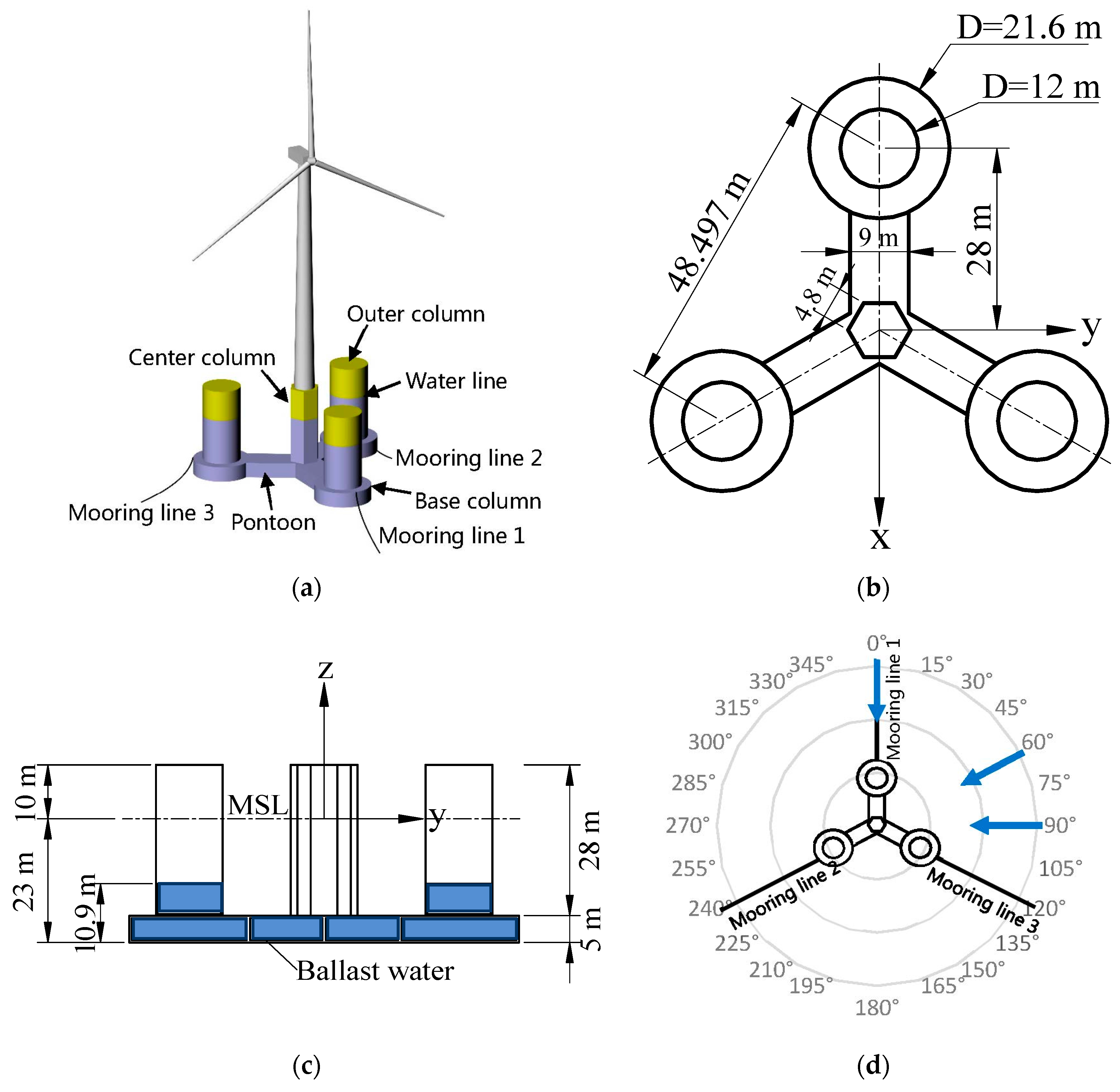
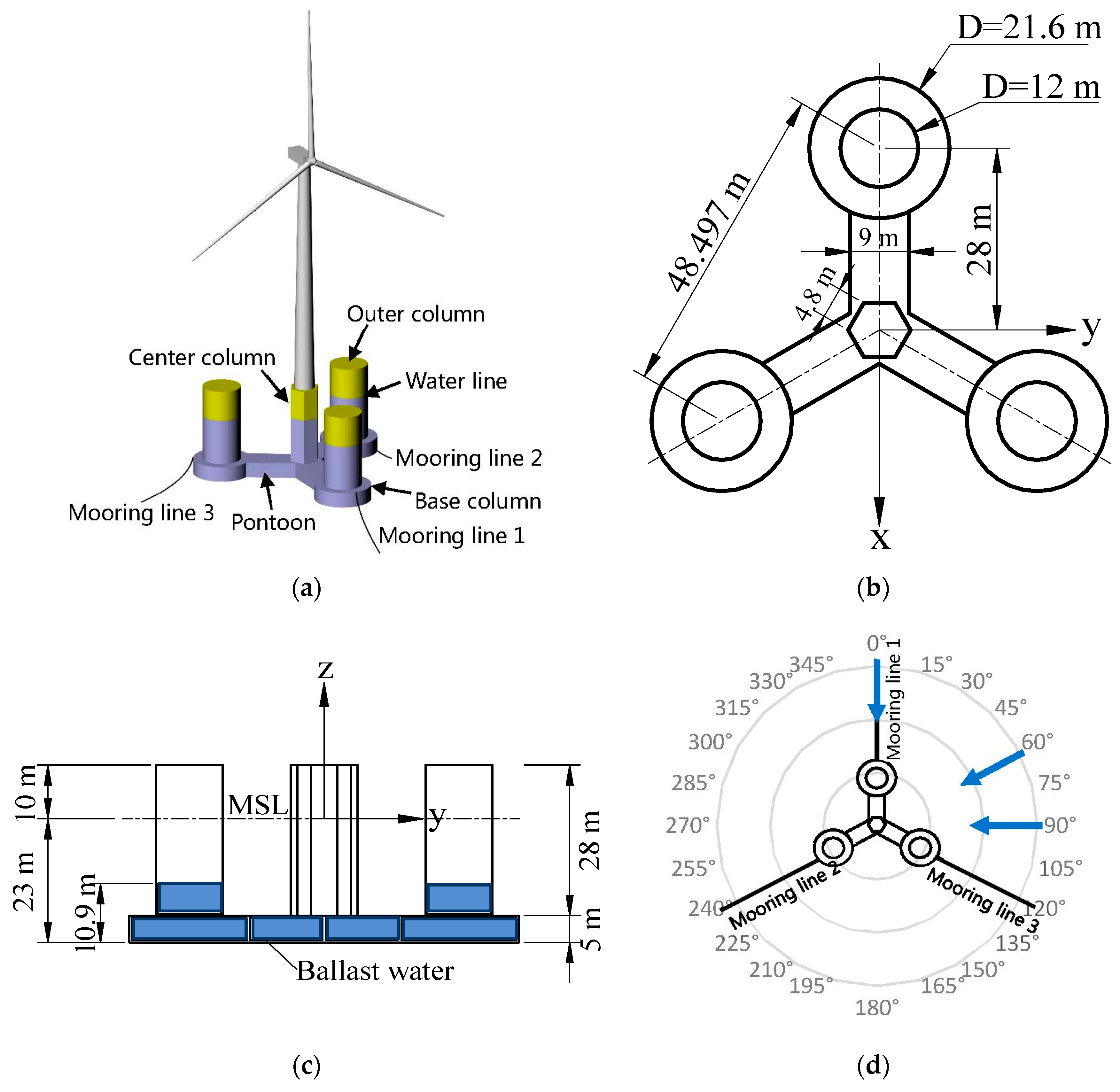
As shown in
Figure 1, the investigated floating wind turbine system named ConFloat is composed of a 5 MW horizontal axis wind turbine, a semi-submersible foundation and a three-line catenary mooring system.
The wind turbine is a conventional three-bladed upwind direct-driven turbine. Similar to the NREL offshore 5 MW baseline wind turbine [
33], its hub height is 90 m above MSL and the cut-in, rated and cut-out wind speed are 3 m/s, 11.5 m/s and 25 m/s (10-min average wind speed at hub height) respectively.
The four-column semi-submersible foundation is a conceptual design conceived by the authors’ research group. Its main characteristics are listed as follows:
- (1)
Prestressed concrete is used to construct the major structure, which is expected to reduce manufacturing cost and a better resistance against corrosion and fatigue compared with steel;
- (2)
Three rectangle section pontoons are arranged between the outer columns and the center column for connection, providing sufficient strength and stiffness for the platform. No brace arm is designed so as to reduce fatigue occurred at the joints [
8];
- (3)
The base columns and large-section pontoons are helpful to provide space for ballast, lower the center of gravity and alleviate the motion response, especially the heave motion.
The components and dimensions of the platform are shown in
Figure 1b,c along with the coordinate system employed in this study. The pontoons, base columns and outer columns are filled with ballast water to achieve 23 m draft. The wind/wave load directions relative to the platform are given in
Figure 1d. It should be noted that the x-axis direction is always consistent with the load direction and the rotor is also yawed to meet the wind accordingly. High-strength lightweight concrete with density of 1900 kg/m
3 is adopted for the platform construction. By carrying out preliminary structural analysis, the platform wall of 350 mm thickness is robust enough to resist environmental loads. Furthermore, in order to increase the structural stiffness and separate watertight compartments, stiffeners and bulkheads are arranged inside the platform and considered during the calculation of structural properties, which are summarized in
Table 1.
The platform is moored with three catenary mooring lines, as shown in
Figure 1b. The fairleads are located at the outside edge of the base column at the water depth of 18 m below MSL. Properties of the catenary mooring system are summarized in
Table 2.
4. Numerical Simulations
The main purposes of this numerical study are threefold: (1) to validate a coupled aero-hydro-servo-elastic dynamic floating wind turbine simulator with the model test data; (2) to further investigate the main causes of the aligned wind and wave directionality effects; (3) to analyze physical qualities which are not measured in the tests, such as the tower base fore-aft bending moment and nacelle acceleration.
FAST, an open source time domain wind turbine simulator from NREL, integrates the computational methodologies and analysis tools of onshore wind turbine and offshore oil and gas industries [
21], making the coupled aero-hydro-servo-elastic dynamic analysis of floating wind turbine systems realizable. In FAST, the floating platform is regarded as a six DOFs rigid body whose motions can be described by the following differential Equation:
where
M is the structure mass matrix;
A(∞) is the added mass matrix at infinite frequency;
,
and
are the platform displacement, velocity and acceleration vectors respectively;
K(
τ) is the wave-radiation-retardation kernel which depends on the added mass and radiation damping matrix;
C is hydrostatic restoring matrix;
Badd is the user-defined additional quadratic damping matrix;
Fwave(
t) is the excitation load from incident waves;
FAero(
t) is the aerodynamic load from wind turbine;
FLines(
t) is the load from the mooring lines. The hydrodynamic, aerodynamic and mooring loads applied in the numerical models will be discussed in the following subsections.
4.1. Hydrodynamics Modeling
The solution of the hydrodynamic problem in FAST is based on potential flow theory as well as the Morison’s equation. For the first-order potential flow, the hydrodynamics problem is composed by radiation, diffraction and hydrostatics. The radiation effect refers to the force and moment on the body when the structure is forced to oscillate in calm water. The radiation loads are identified as two terms, namely added mass and radiation damping, which are denoted by the first two terms on the left side of Equation (1). These two terms, which are the function of the structure’s geometry, the frequency of oscillation and the finite water depth [
44], are independent of the wave headings. The diffraction effect is related to the hydrodynamic loads induced by the incident waves with the body held fixed, denoted by
Fwave(
t) in Equation (1). It relies on the body form and wave headings. The third term,
Cq(
t), represents the restoring force/moment resulting from the effects of waterplane area and the gravitational-buoyancy as the displacements of the platform (heave, roll and pitch) take place. The hydrodynamic coefficients of these three terms can be obtained by solving the boundary-value problem using panel method [
45].
Previous studies [
46,
47,
48,
49] had demonstrated that the first-order theory for potential flow is insufficient for the FOWT dynamics prediction. The second-order hydrodynamic theory can more accurately account for the nonlinear free-surface boundary conditions and the loadings about the actual instantaneous wetted surface of a platform, which may be critical in the hydrodynamic analysis. In general, the second-order hydrodynamic loads are composed of the mean-drift forces, the difference-frequency drift force and the sum-frequency drift force. For a semi-submersible platform, the difference-frequency drift force is important since it can excite the natural frequencies of the structure and result in resonance.
Apart from the linear radiation damping, the effects of viscous damping are also considered in FAST by employing a quadratic term in the left side of the motion equation. In practice, however, the damping coefficient is empirically determined and is dependent on many factors, including the Reynolds number effects and surface roughness. For that reason, a user-defined quadratic damping matrix Badd is available in FAST, helping to tune the numerical model to match damping to experimental results, such as free decay tests.
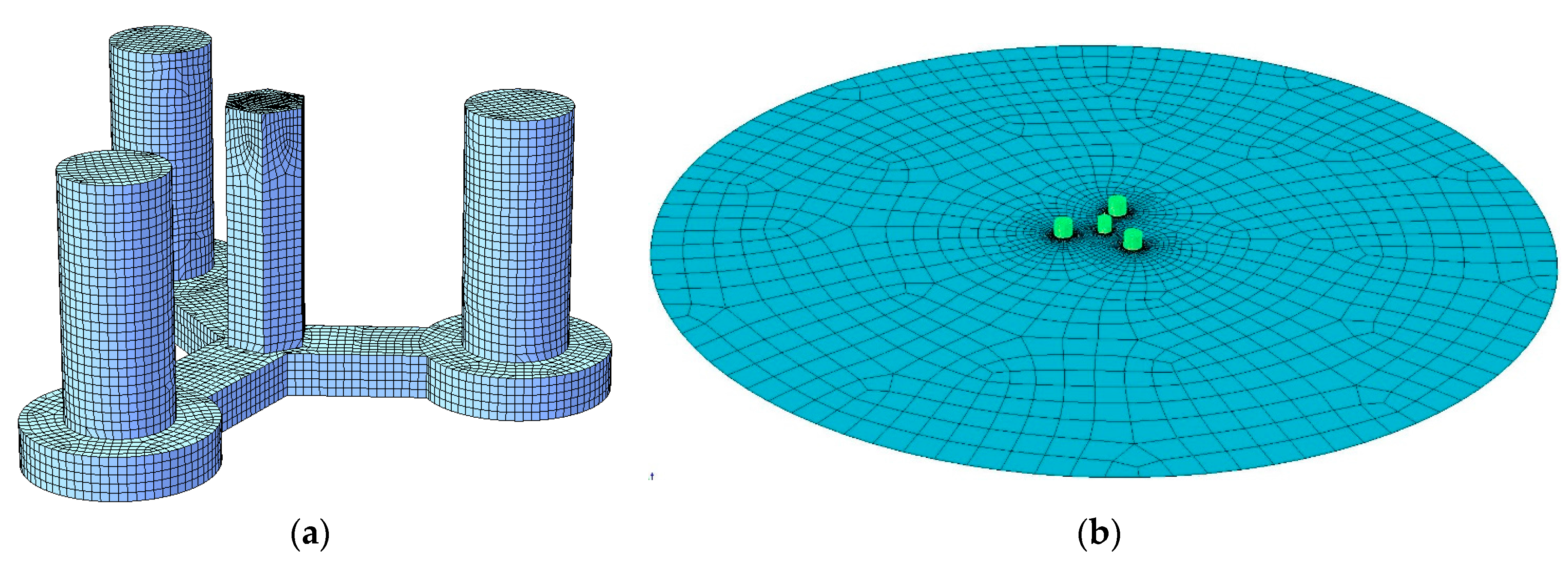
In the case of the ConFloat FOWT numerical model, both the first- and the second-order hydrodynamic coefficients were calculated. The panel model employed in potential flow computation is shown in
Figure 9a. The grid size sensitivity analysis was carried out to ensure the independence and efficiency of the solutions. The intrinsic properties of the system such as the mass, the center of gravity and the moment of inertia were derived from a 3D solid model. Totally 60 wave frequencies within the range of [0.05 3.0] rad/s by a step of 0.05 rad/s were adopted for the analysis. For the second-order effects, the mean-drift force and the difference-frequency drift force were computed with full Quadratic Transfer Function (QTF), while the sum-frequency drift force was ignored. The free surface grids are presented in
Figure 9b. For the viscous drag term, the user-defined additional quadratic damping matrix was tuned by trial and error until the simulation free-decay results matched well with the test data for each DOF.
4.2. Aerodynamics Modeling
Two wake models, the blade element momentum (BEM) theory and the generalized dynamic wake (GDW) theory, are usually used for the aerodynamic calculations for aero-elastic simulations of horizontal axis wind turbine configurations [
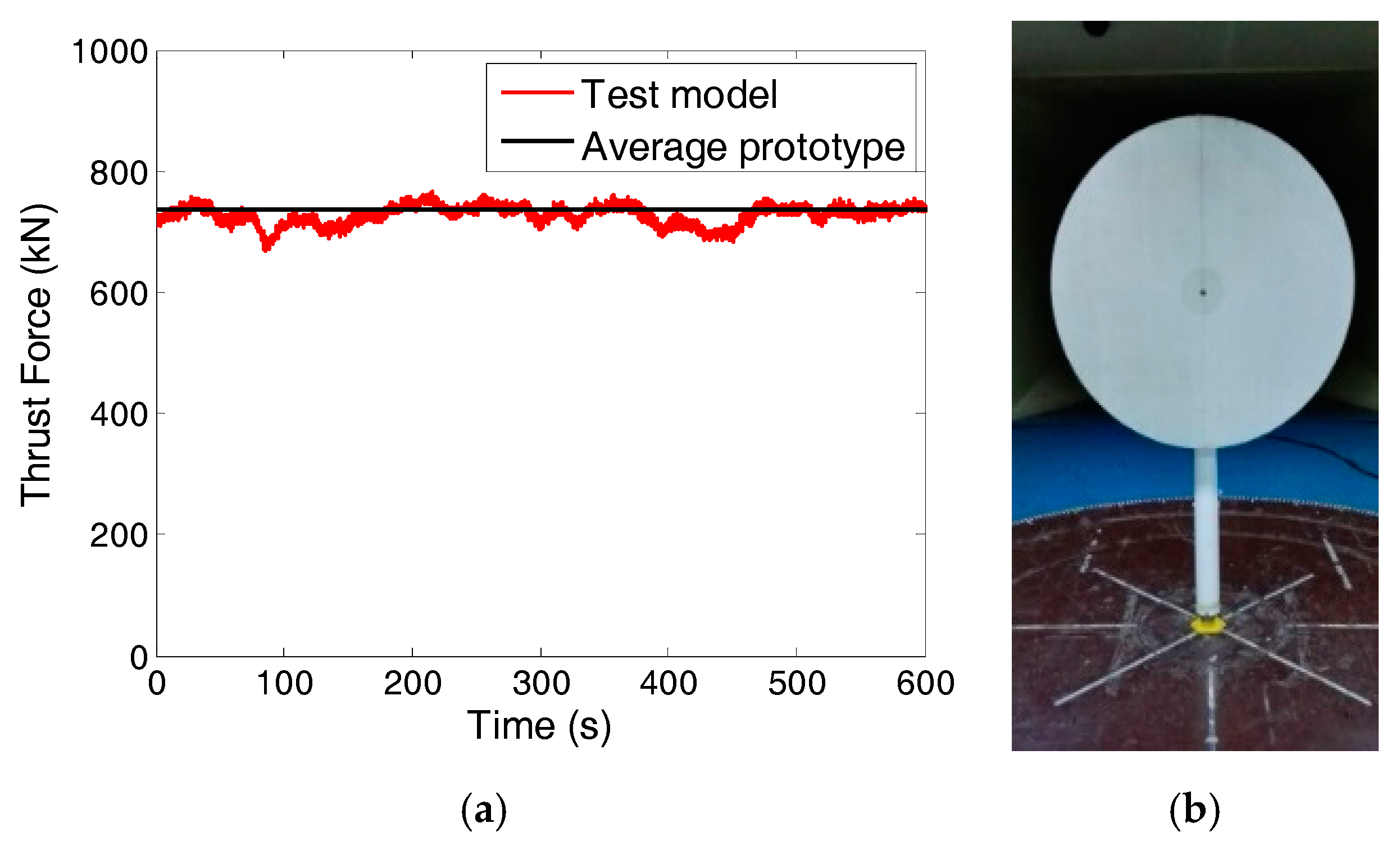
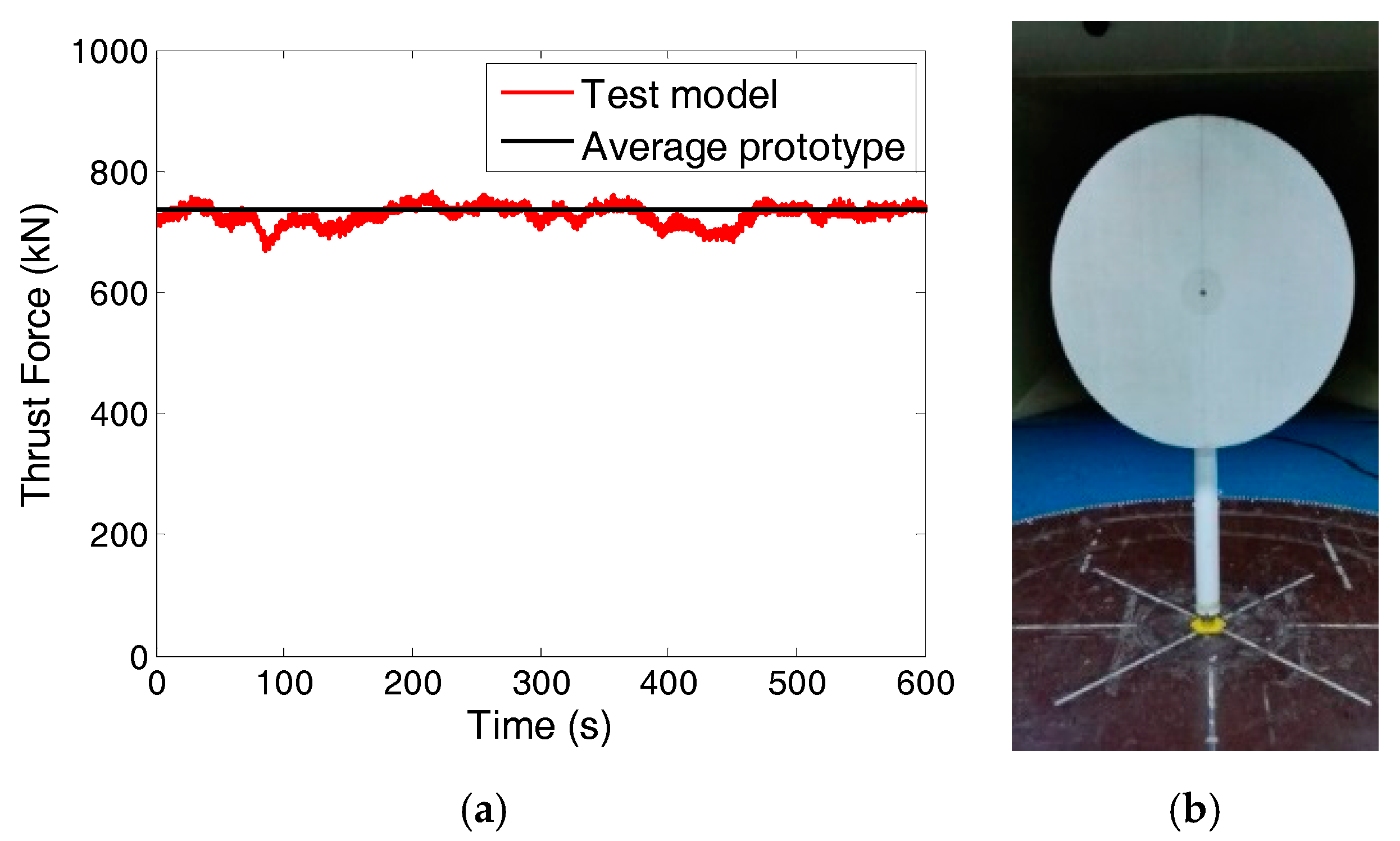
20]. Note that the average wind effects on the rotor were simulated by a drag disc rather than a full rotor in the tests. To ensure consistency, the wake model was turned off and the numerical wind turbine model was also modeled as an irrotational bluff body whose total wind thrust force can be simply estimated by the following formula:
where
is the wind drag coefficient of the
i-th component of the wind turbine;
ρ is the air density;
vwi(
t) is the wind speed at the height of the
i-th component at time
t;
vi(
t) is the motion velocity of the
ith component along the incoming wind direction at time
t;
Ai is the projected area of the
i-th component along the incoming wind direction. Before the dynamic simulations of the FOWT system started, the hydrodynamics module was switched off and the wind drag coefficients of the blades and tower were tuned to match the average tower base forces/moments measured in the wind turbine calibration test.
4.3. Mooring Line Modeling
For modeling the catenary mooring lines or tension legs, three approaches are provided in FAST, i.e., the quasi-static method [
21], the finite element method (FEM) and the lumped-mass approach [
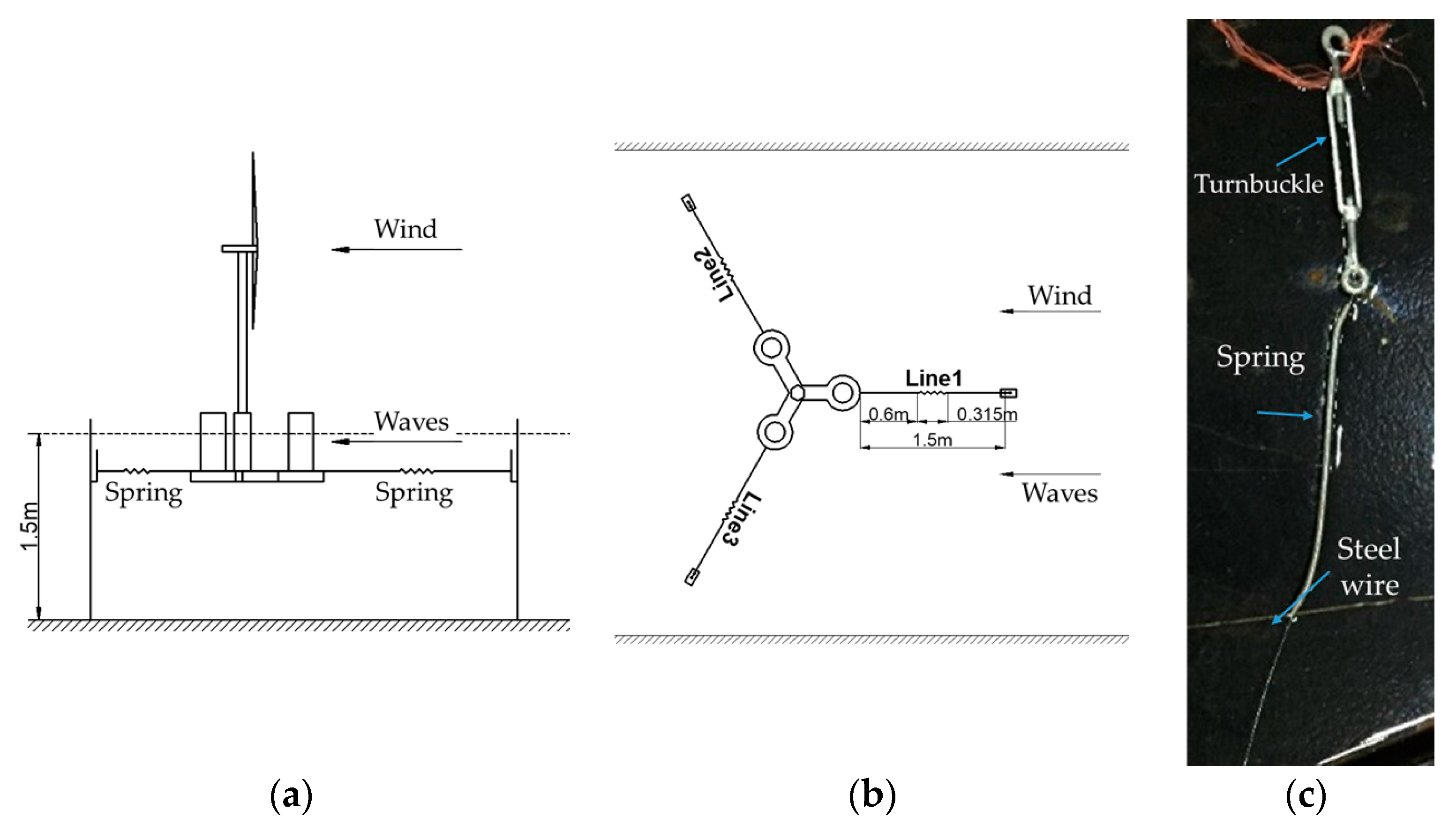
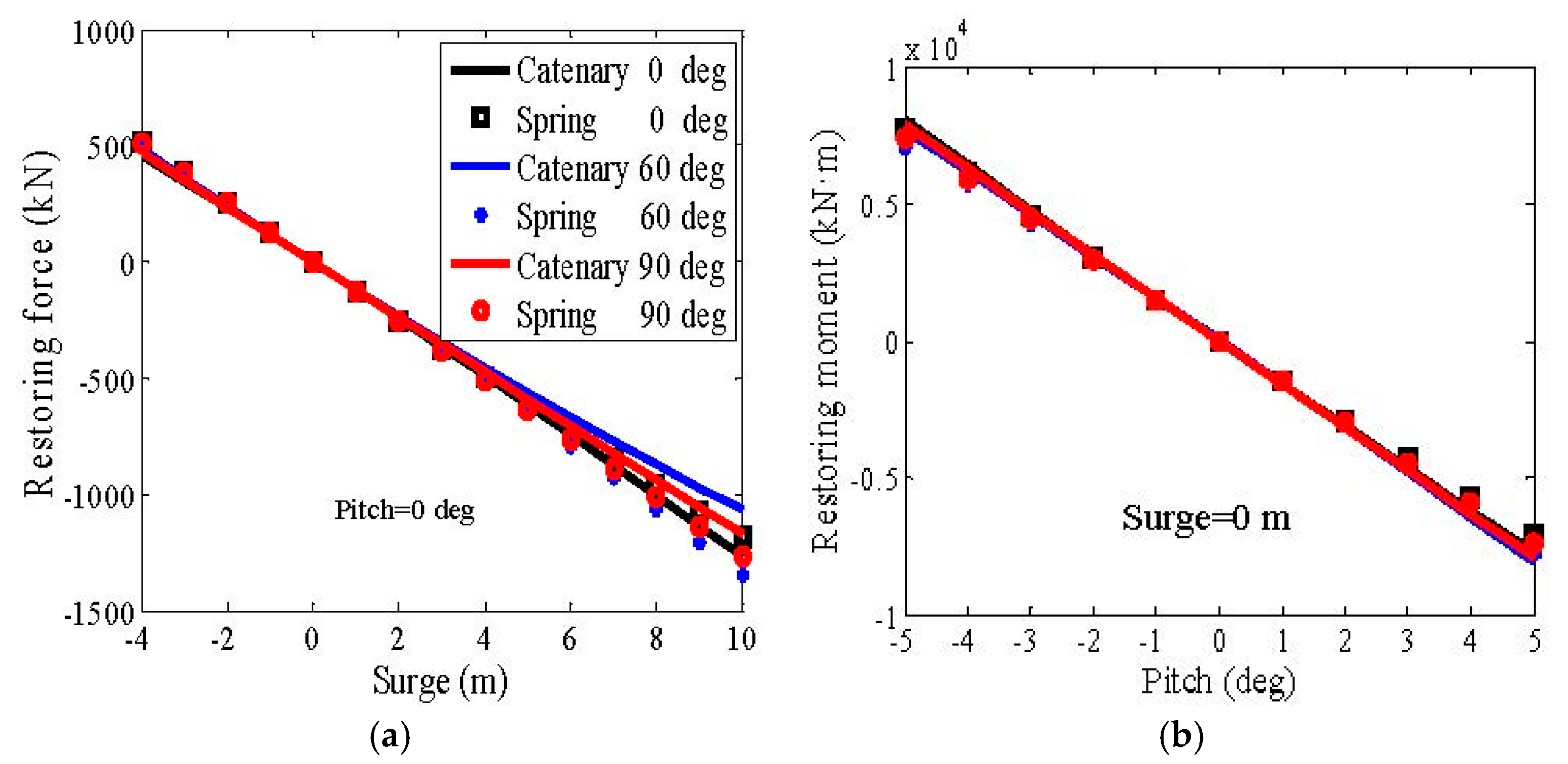
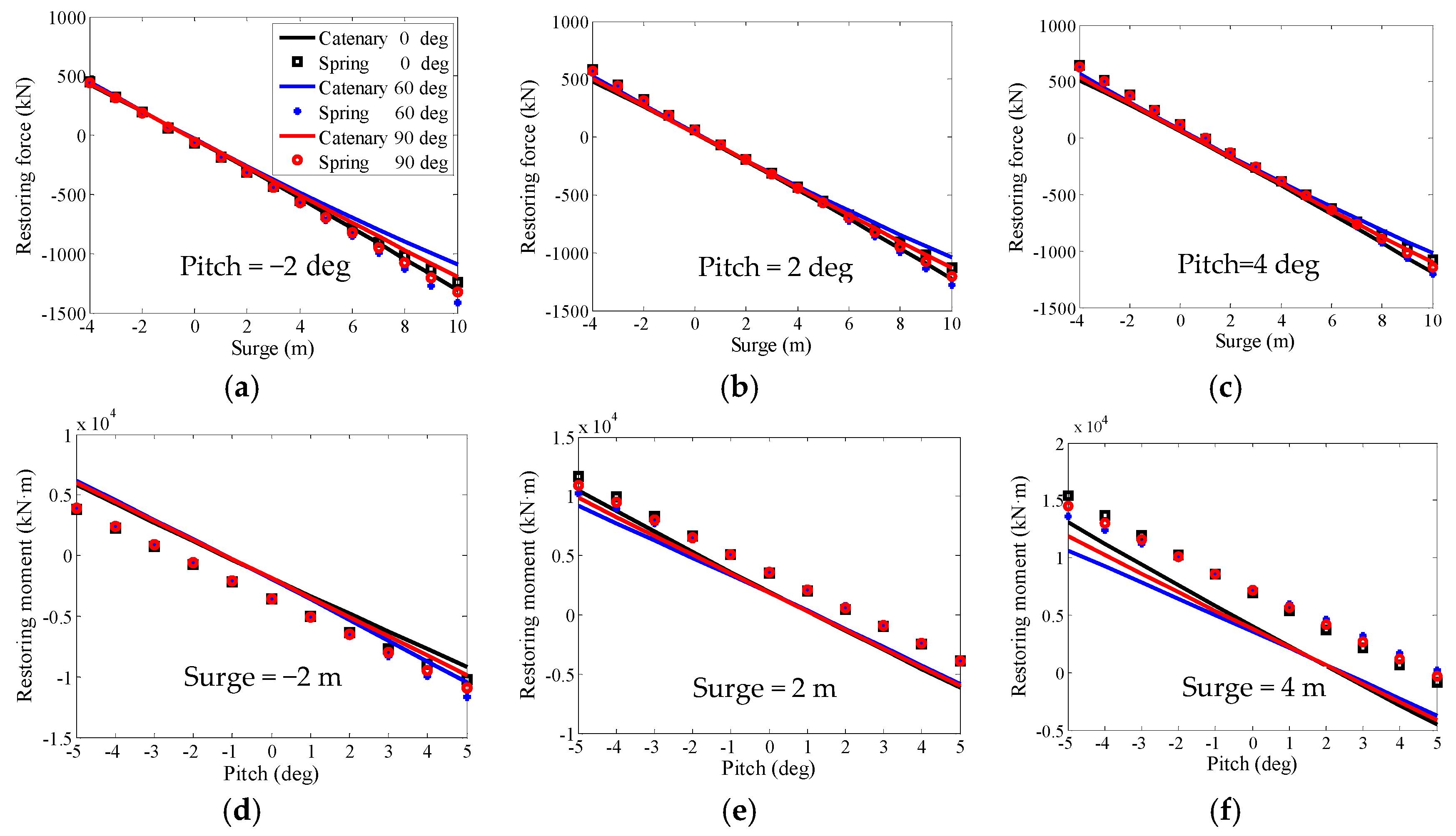
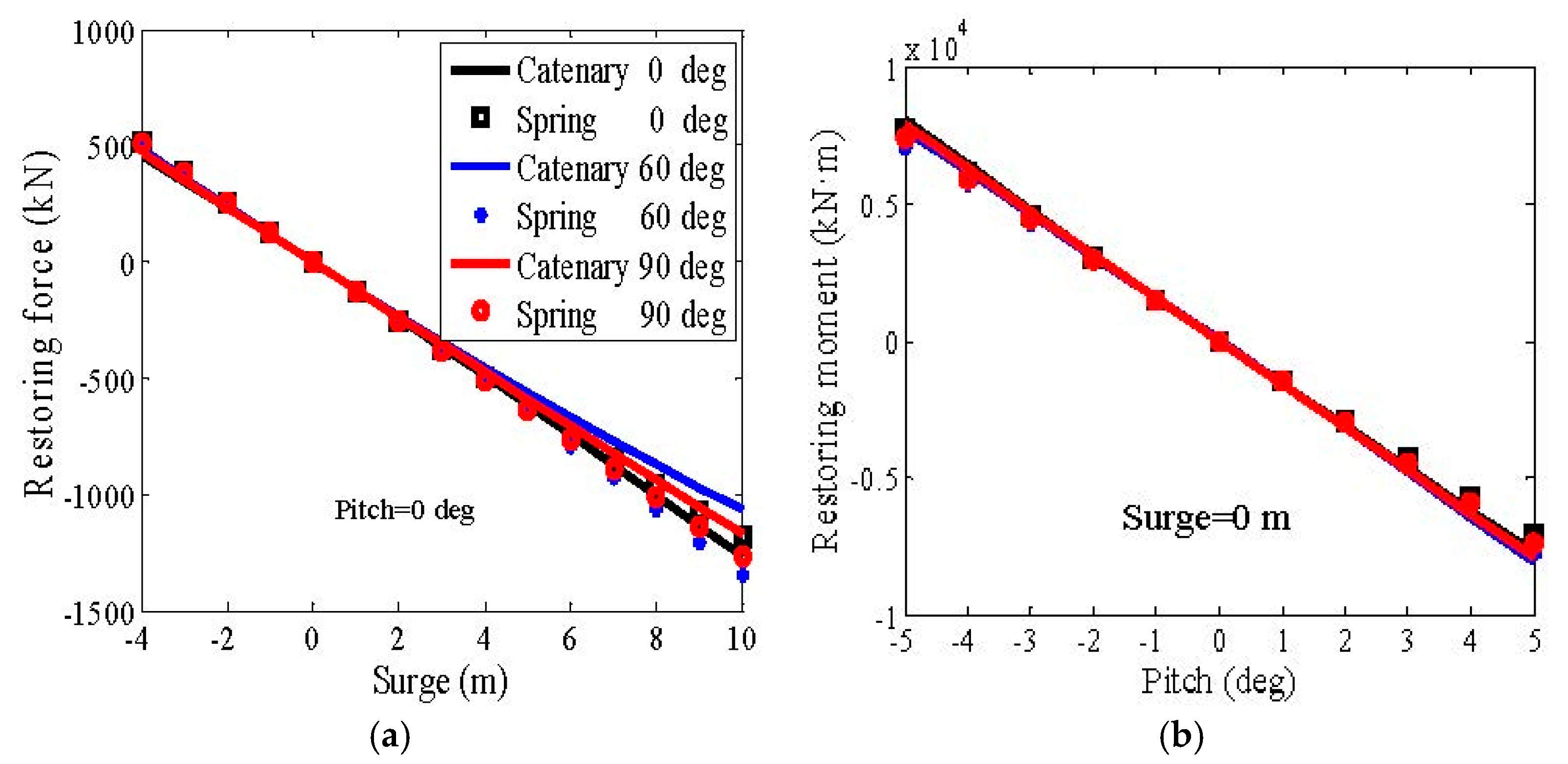
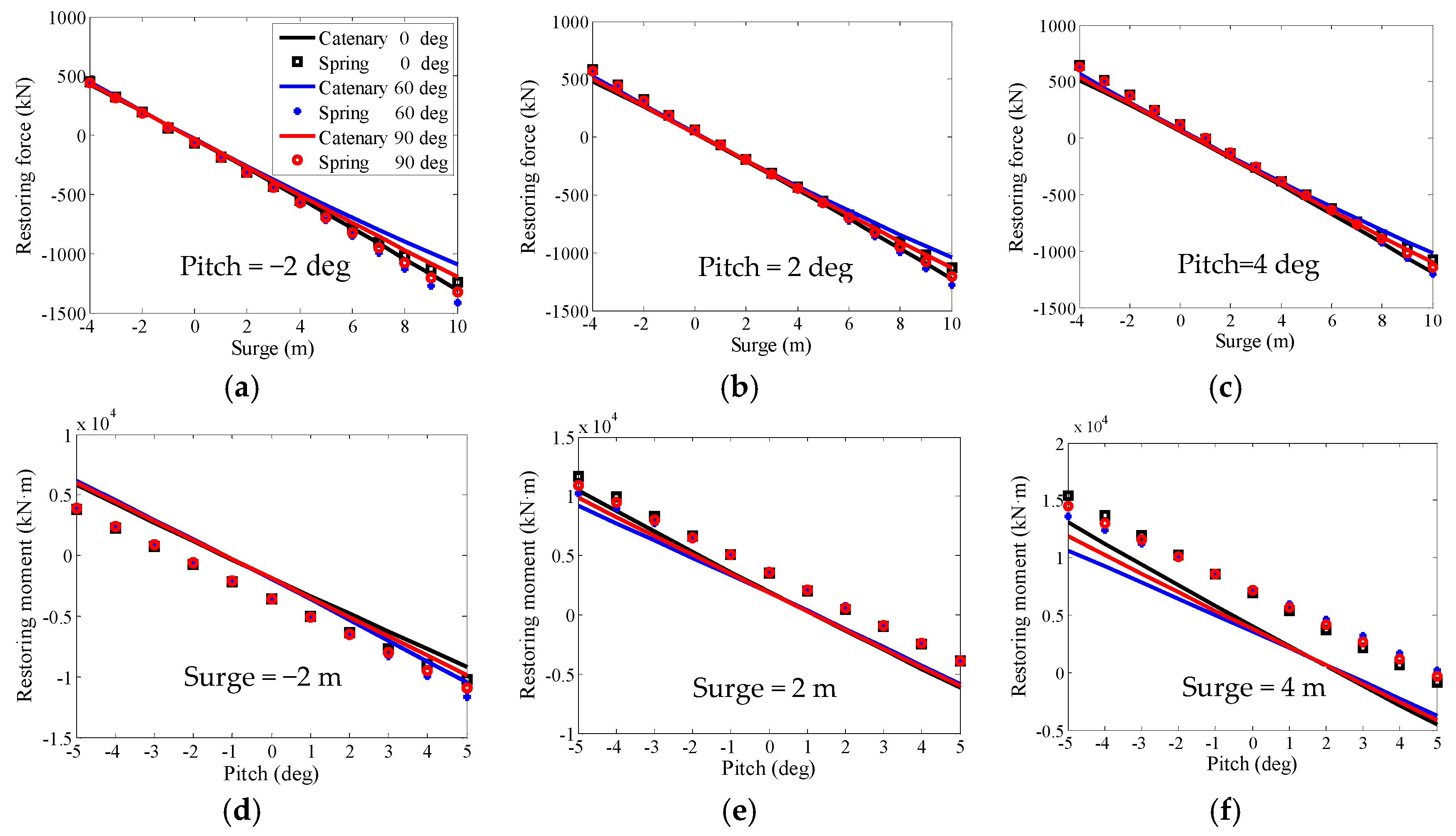
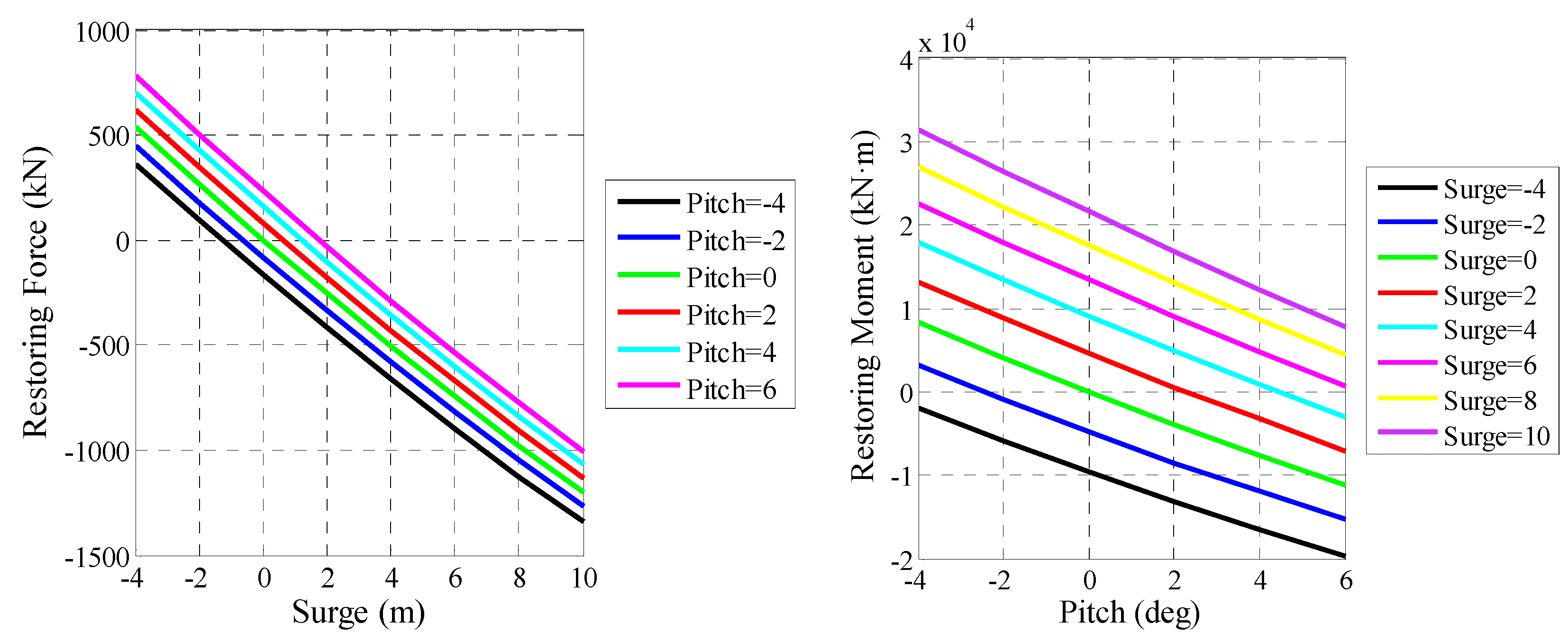
22]. As for the horizontal spring mooring system employed in the tests, good linearity of the load-displacement curves is shown in
Figure 10. Hence, it is feasible to simulate its effects by a linear restoring matrix [
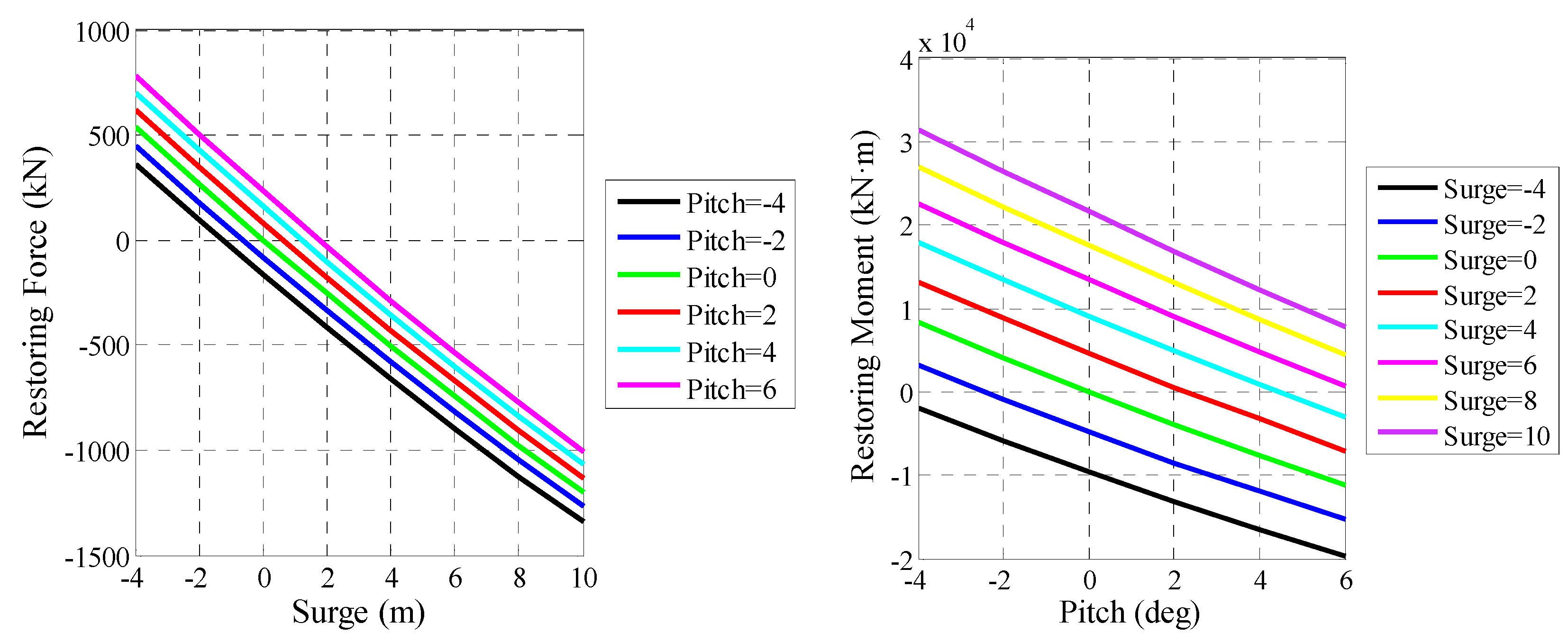
12]. Similar with the catenary mooring lines, the surging and pitching (the swaying and rolling) restoring loads from the spring mooring lines are coupled. In this study, the restoring matrix is estimated by the linear least-squares fitting of the load-displacement curves of the spring mooring system. The slope of the fitted line is the diagonal element for each DOF and the gradient of the intercept against the coupling displacement is the off-diagonal element, namely the coupling term. The spring storing force in the heave DOF is neglected since it is minimal compared with the hydrostatic restoring force. The linear restoring matrix in three load directions, 0°, 60° and 90° in order, are shown in Equation (3). It is found that although the surging and pitching stiffness in 60° are slightly larger than the ones in 0° and 90° loads, the consistency of the spring mooring system between load directions is fair.
4.4. Structural Modeling of the Tower
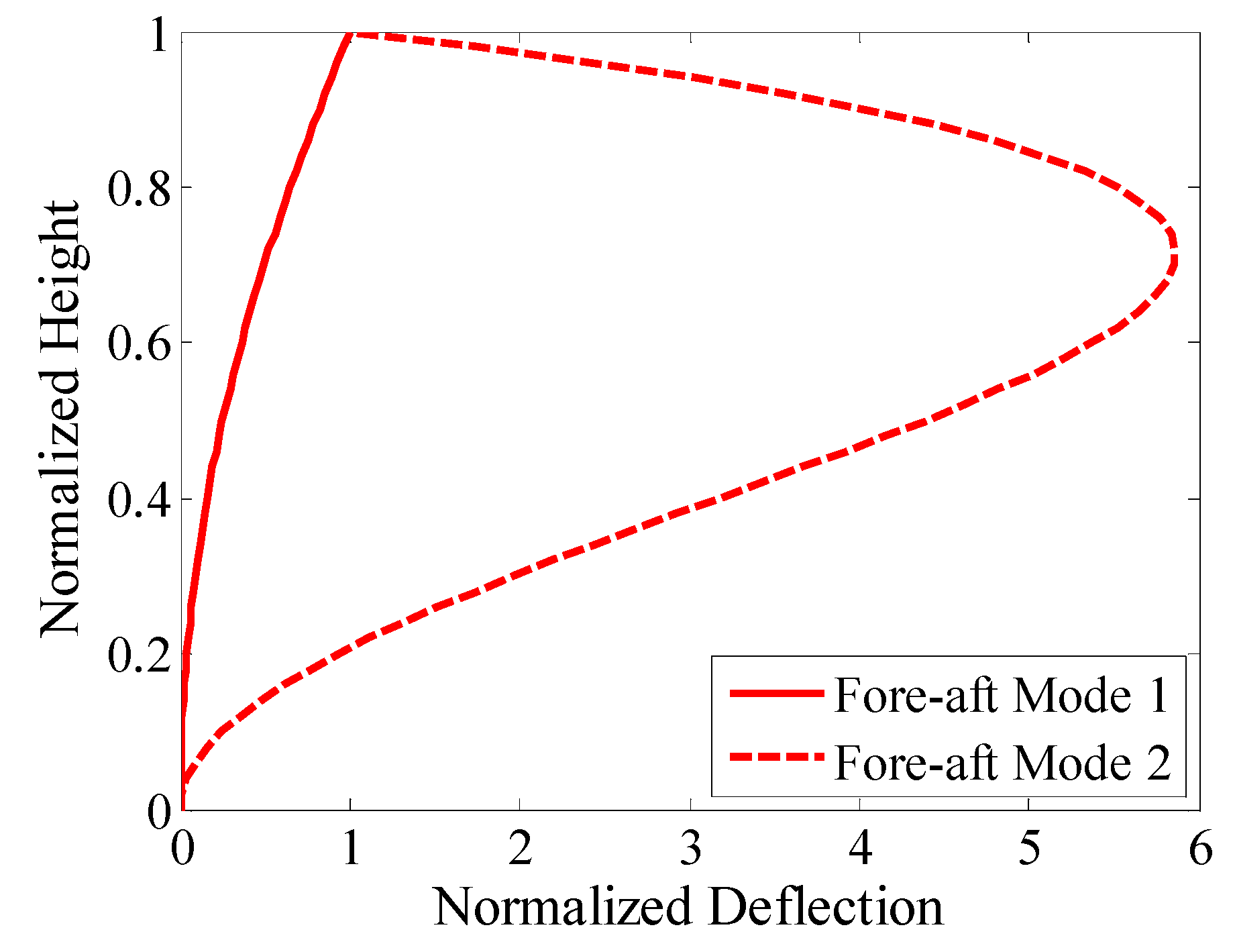
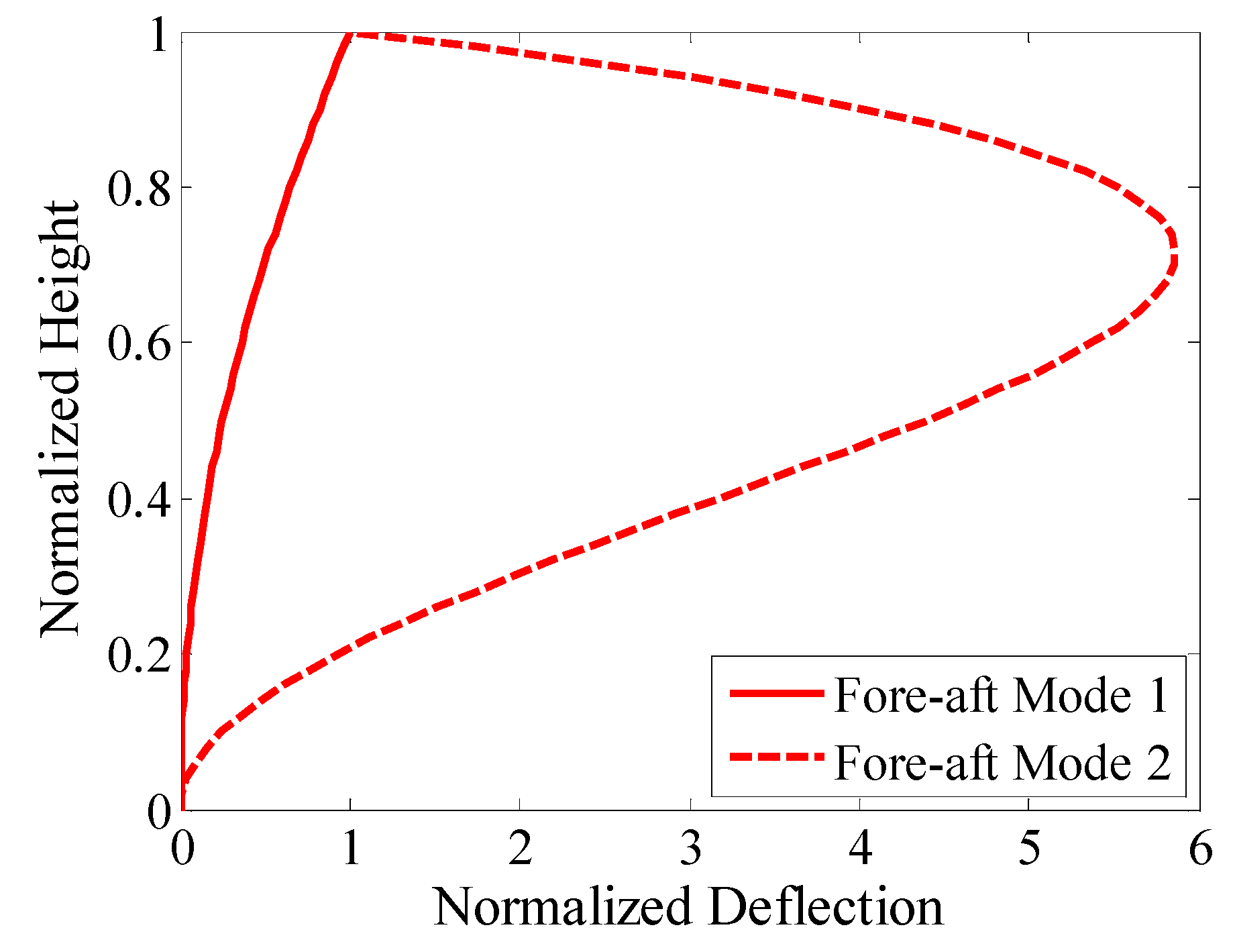
FAST employs an assumed-modes approach to model the tower flexibility and it needs the first two elastic bending mode shapes as well as structural properties to compute modal intergrals for the motion equations of the system. Since the tower mode shapes are strongly affected by the tower-base boundary conditions especially as mounted on a floating platform, the finite-element-method (FEM) based software BModes [
50] capable of handling the coupled modal issues with complex boundary conditions was adopted in this study. The parameters that related to the tower vibration mode shapes such as the tower mass and stiffness distribution, tower-top mass, floating platform mass, added mass, hydrostaric stiffness and mooring stiffness were served as input to BModes, then the inertial and stiffness matrices of the whole system were constructed. Finally, by solving the eigenvalue problem, the tower fore-aft mode shapes are obtained and plotted in
Figure 11. The first- and second-order natural frequencies of the employed turbine tower are 0.444 Hz and 2.949 Hz, respectively.
6. Conclusions
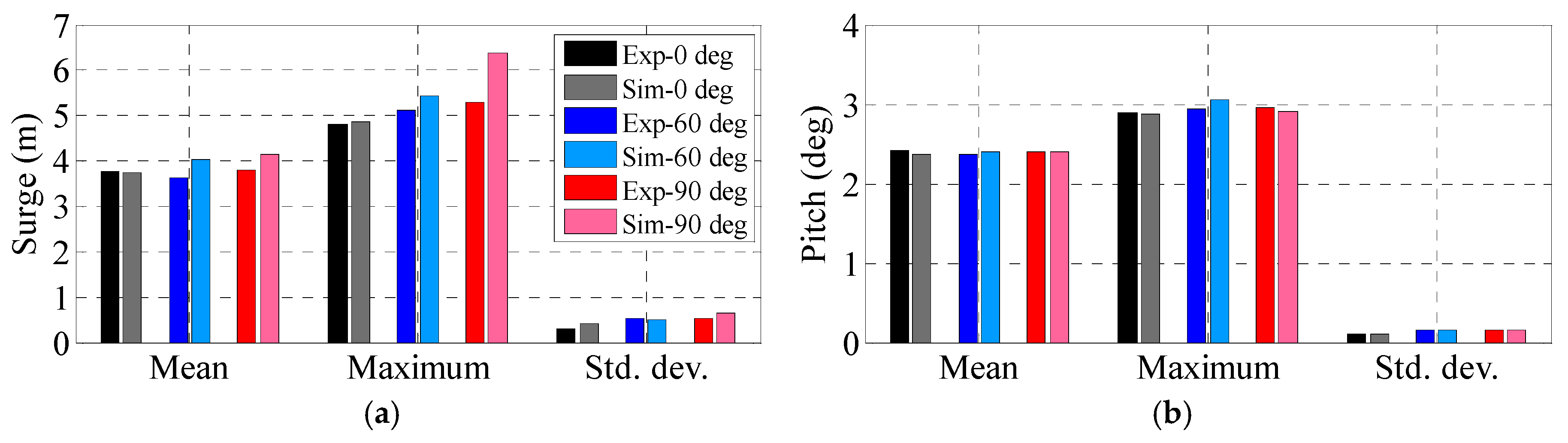
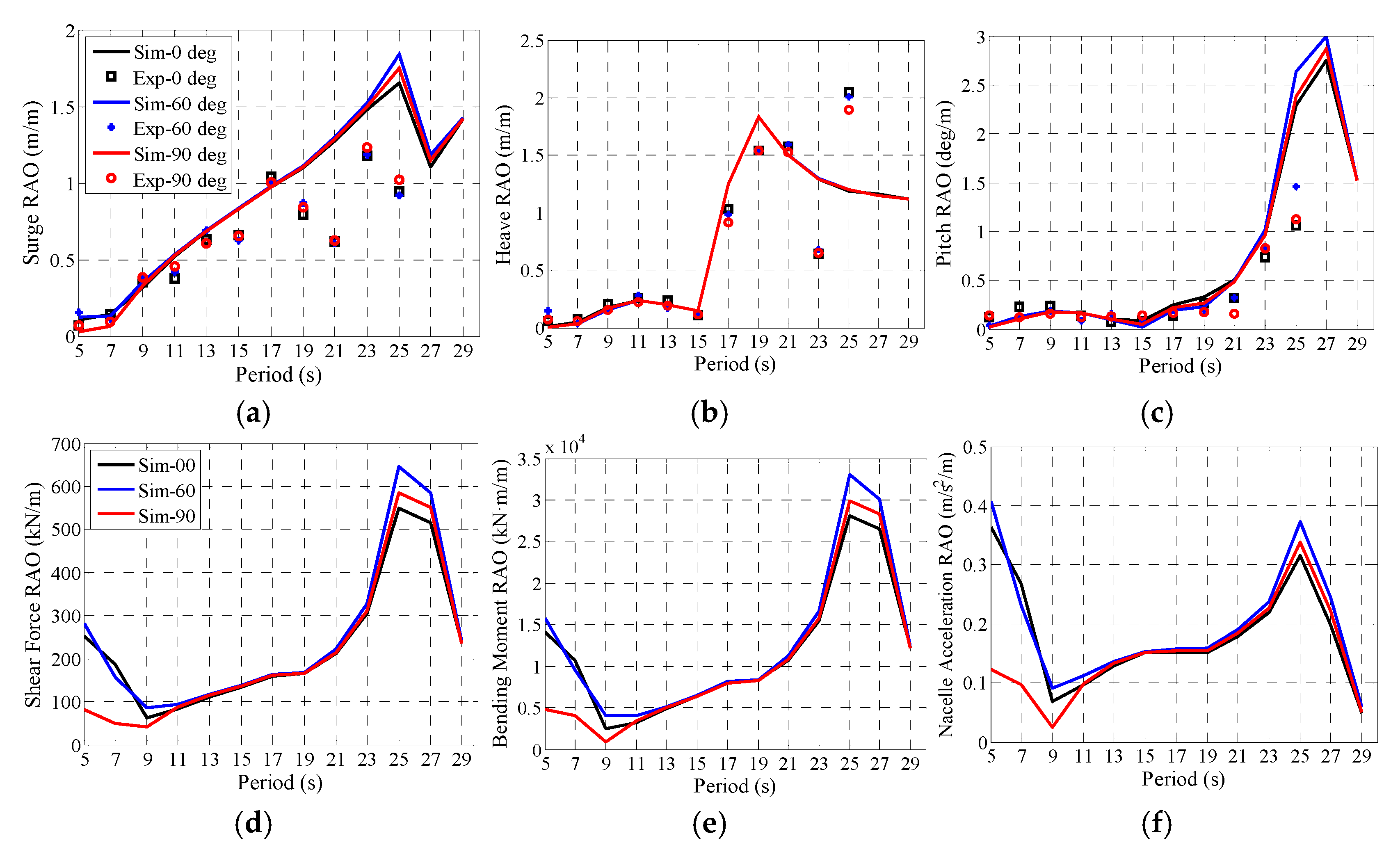
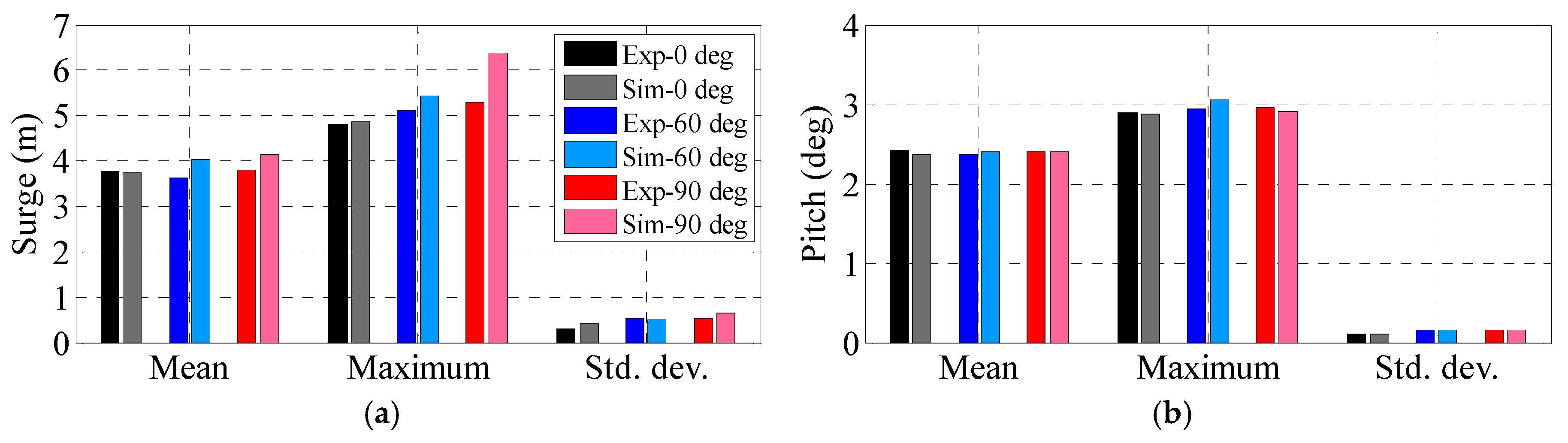
In this paper, the performance of a Y-shape semi-submersible wind turbine in three load directions (0°, 60° and 90°) was investigated by means of model tests and numerical simulations. 1:60 scaled model tests were carried out in the rated operational sea state and the test data validated the numerical models. The effects of aligned wind and wave load direction on the surge, pitch, tower base fore-aft bending moment and nacelle acceleration of the FOWT system are discussed in detail. The main conclusions are summarized as follows:
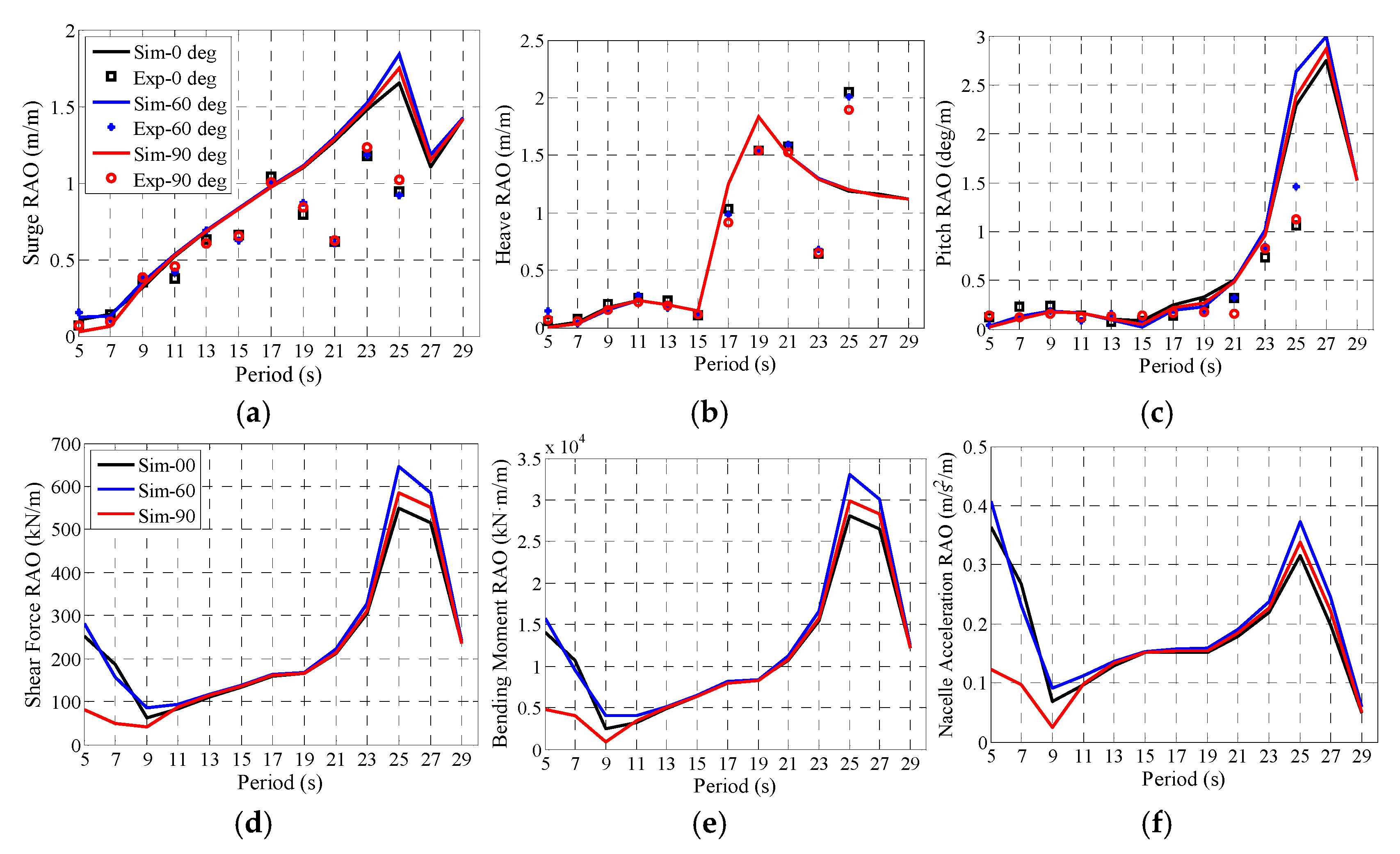
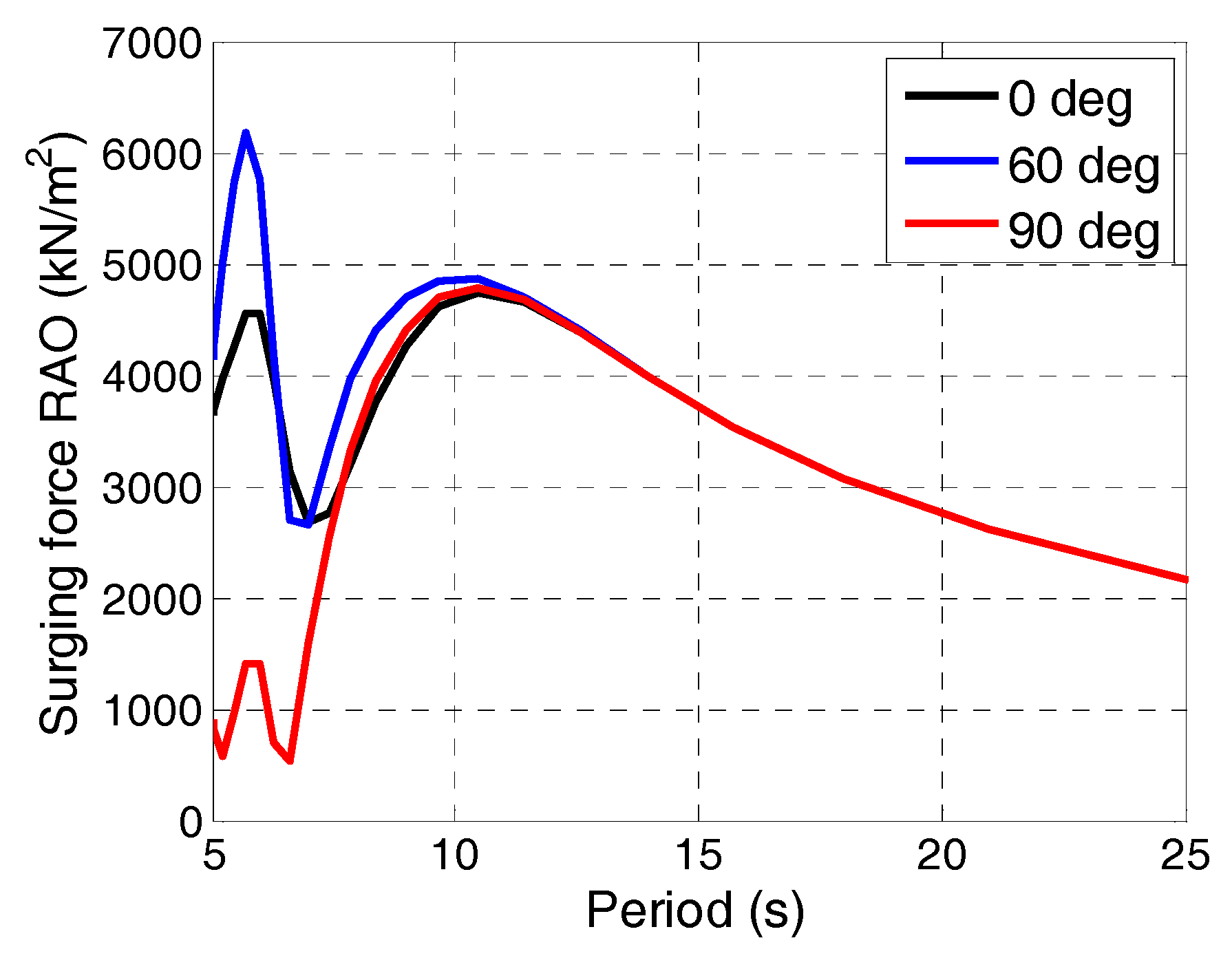
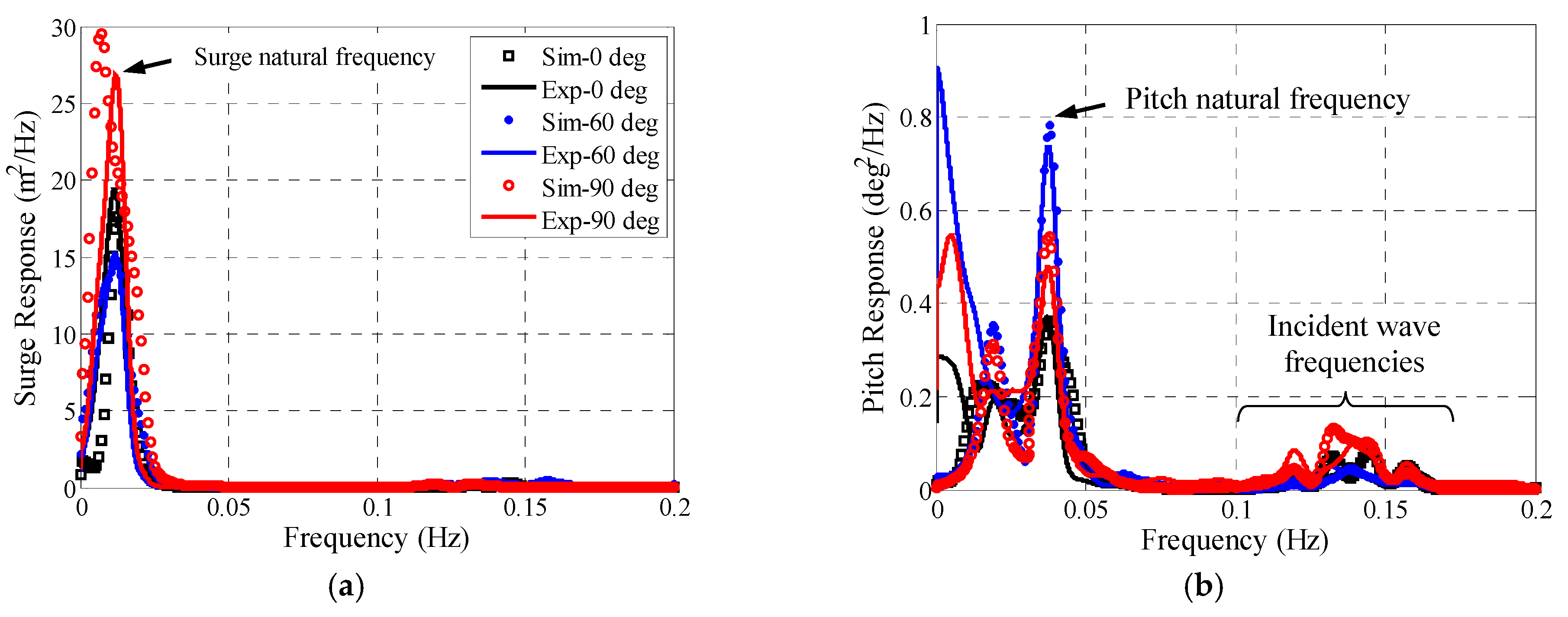
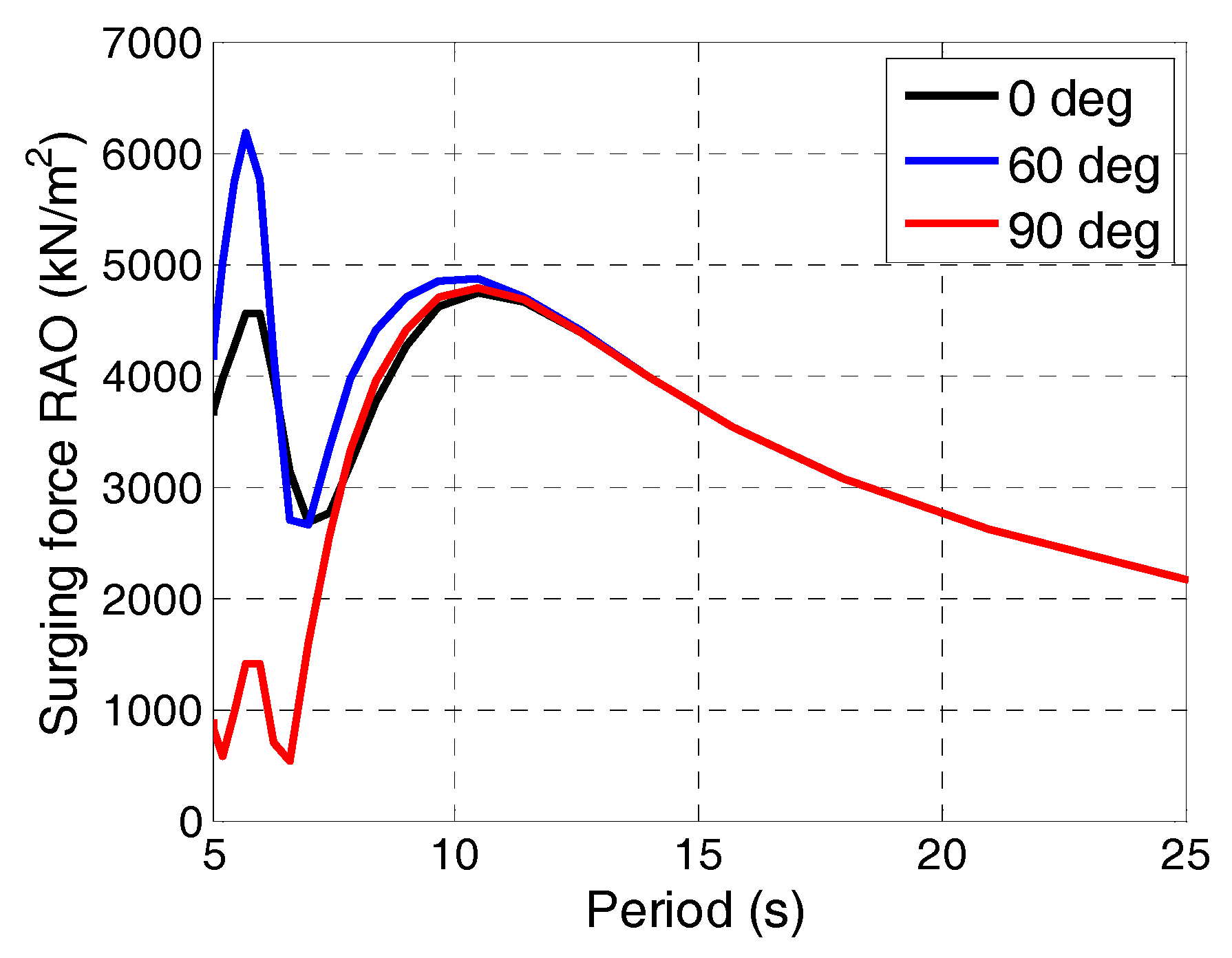
Both the experimental and numerical results for regular wave tests show that the wave load direction has little influence on the first-order heave and pitch motions in most periods (except the period of 25 s). However, remarkable surge differences between the three wave headings are observed in the period of 5 s to 9 s. The RAO magnitudes for the 0° and 60° wave are larger than those for 90°. These differences could be important for the mild or moderate sea states because they will further lead to a large difference in the first-order wind turbine dynamic responses, such as tower base loads and nacelle acceleration. It is found that the RAO values for 0° and 60° are nearly three/four times larger than those for 90°.
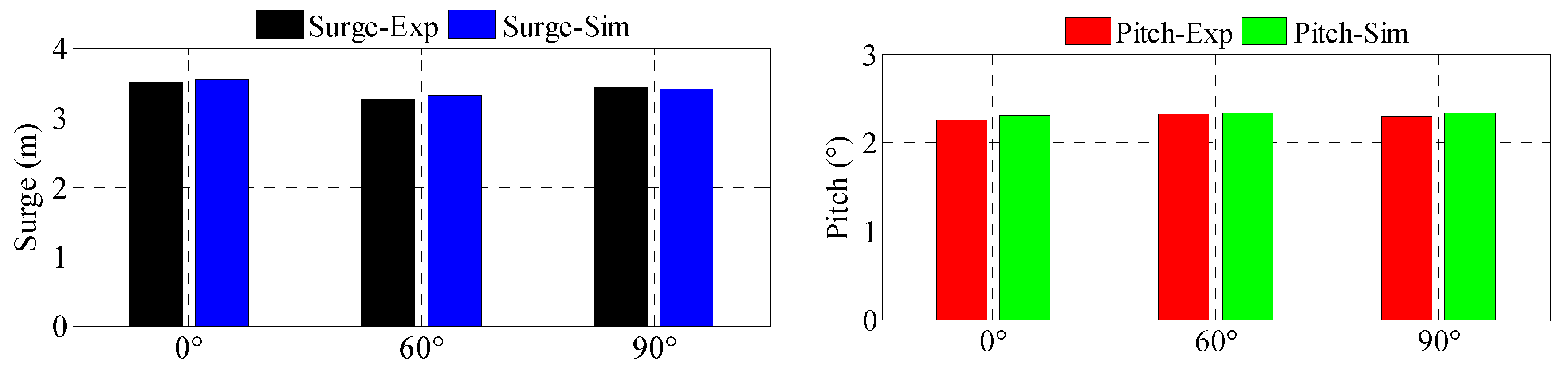
The wind only test results show a very good consistency of pitch motion between wind directions because the ability of the Y-shape semi-submersible platform to resist wind-induced heeling moment from different directions is nearly identical. In other words, the platform motions are less affected by wind load directions.
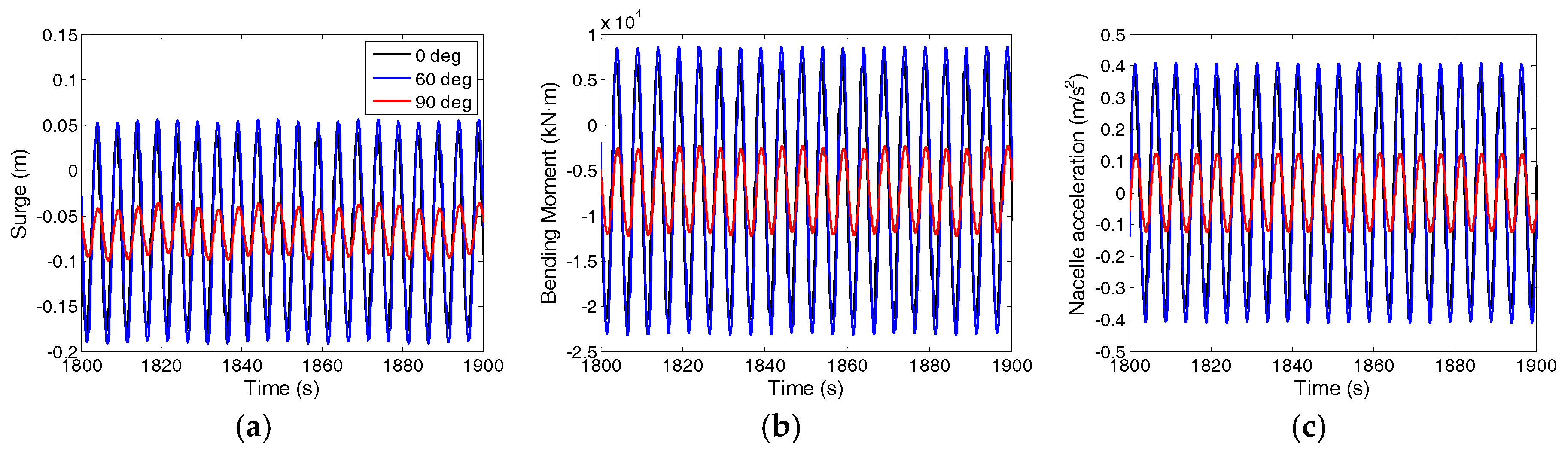
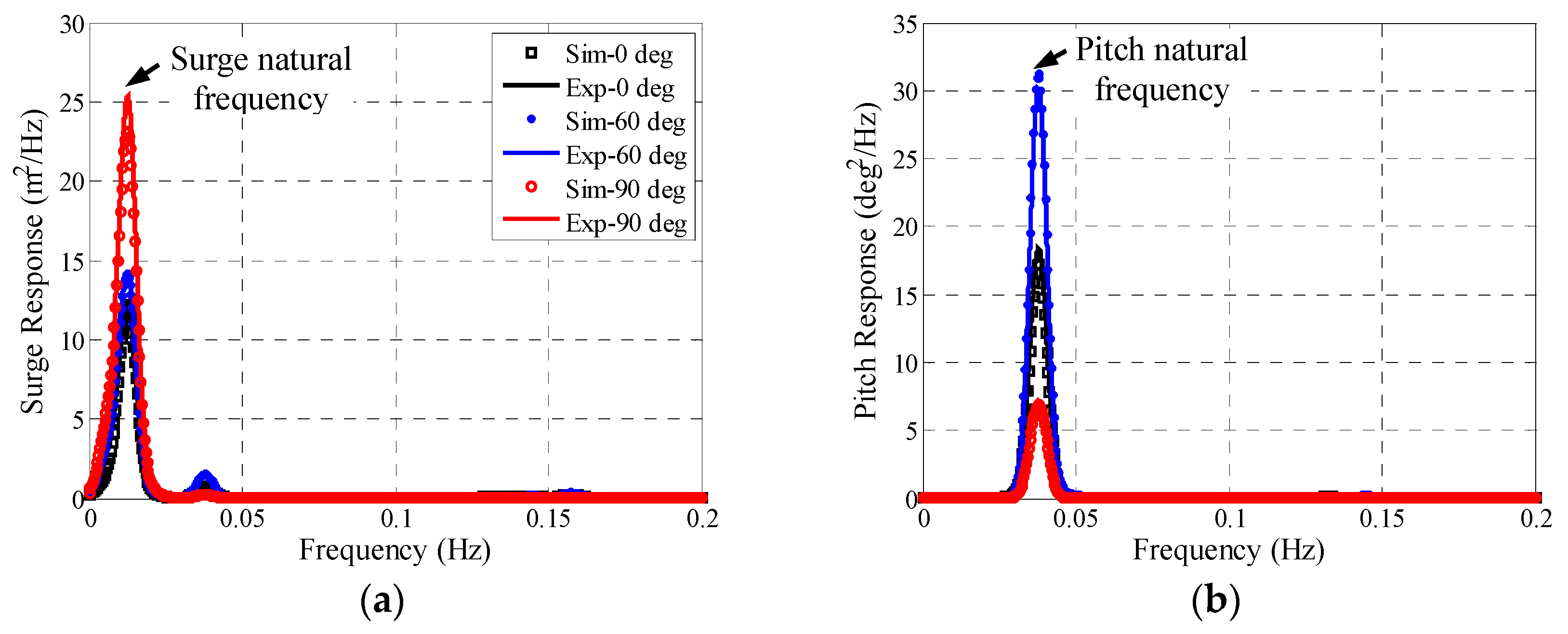
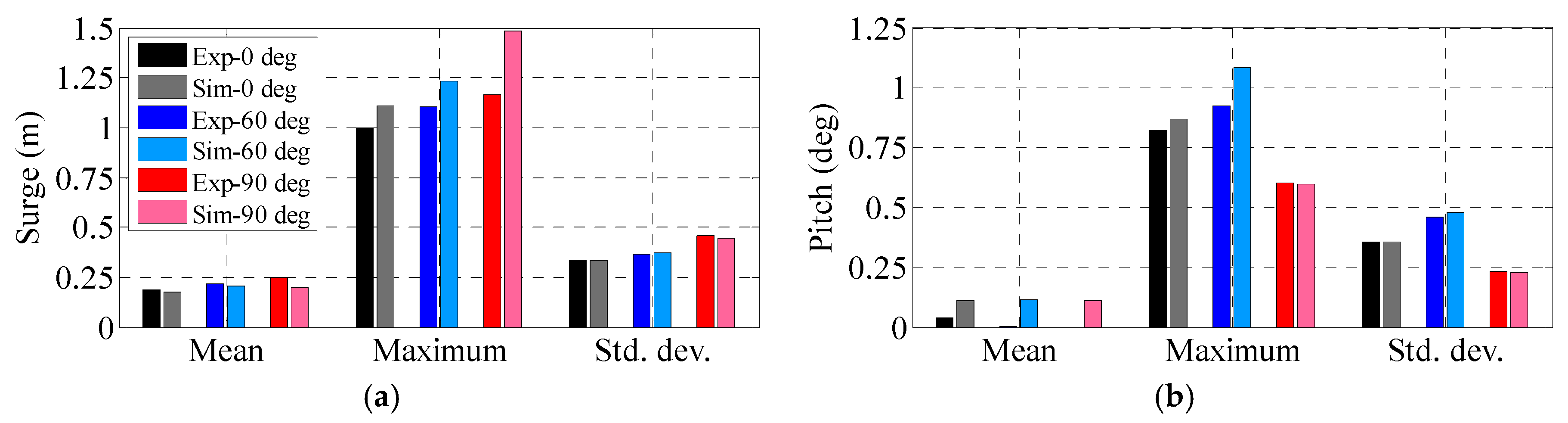
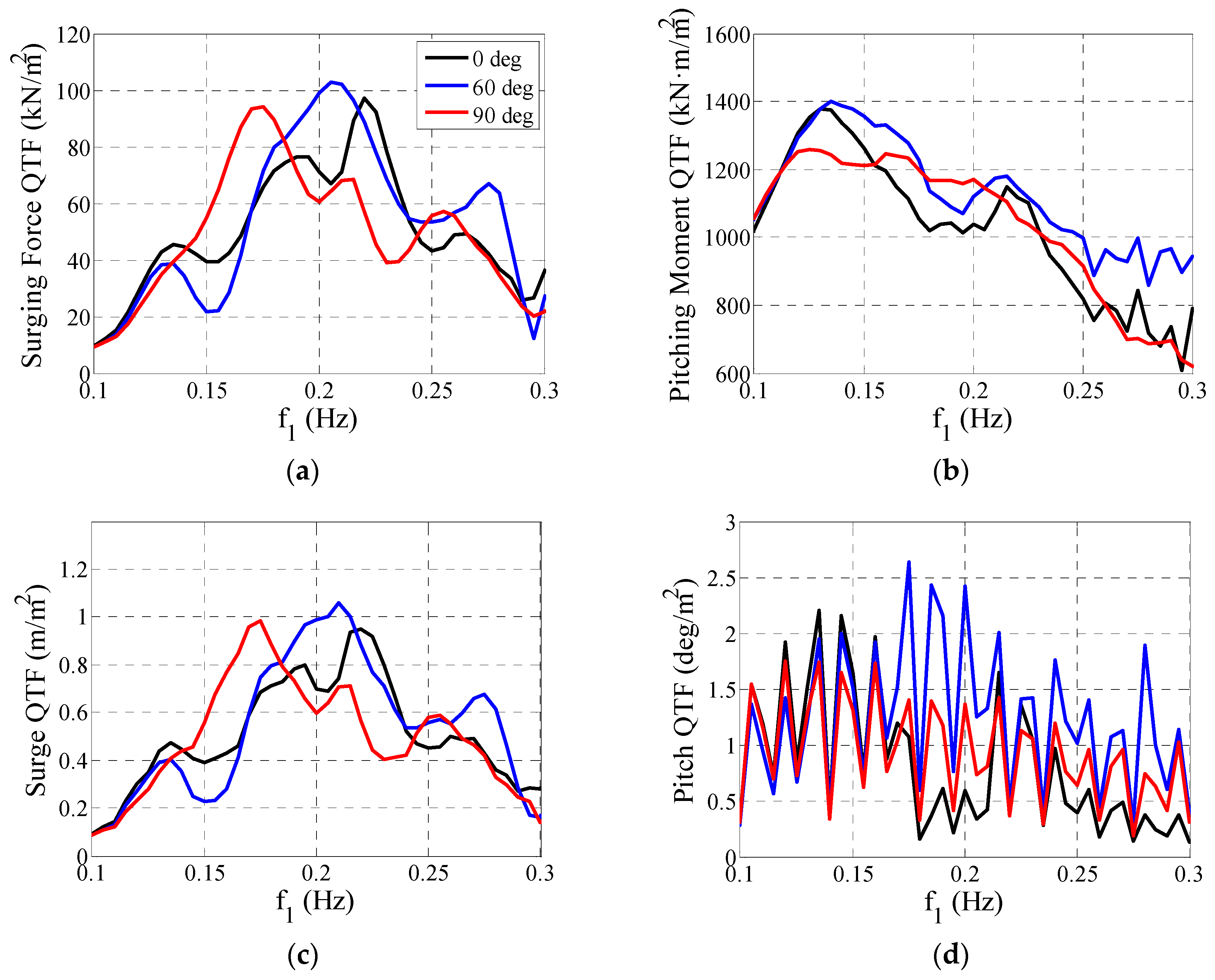
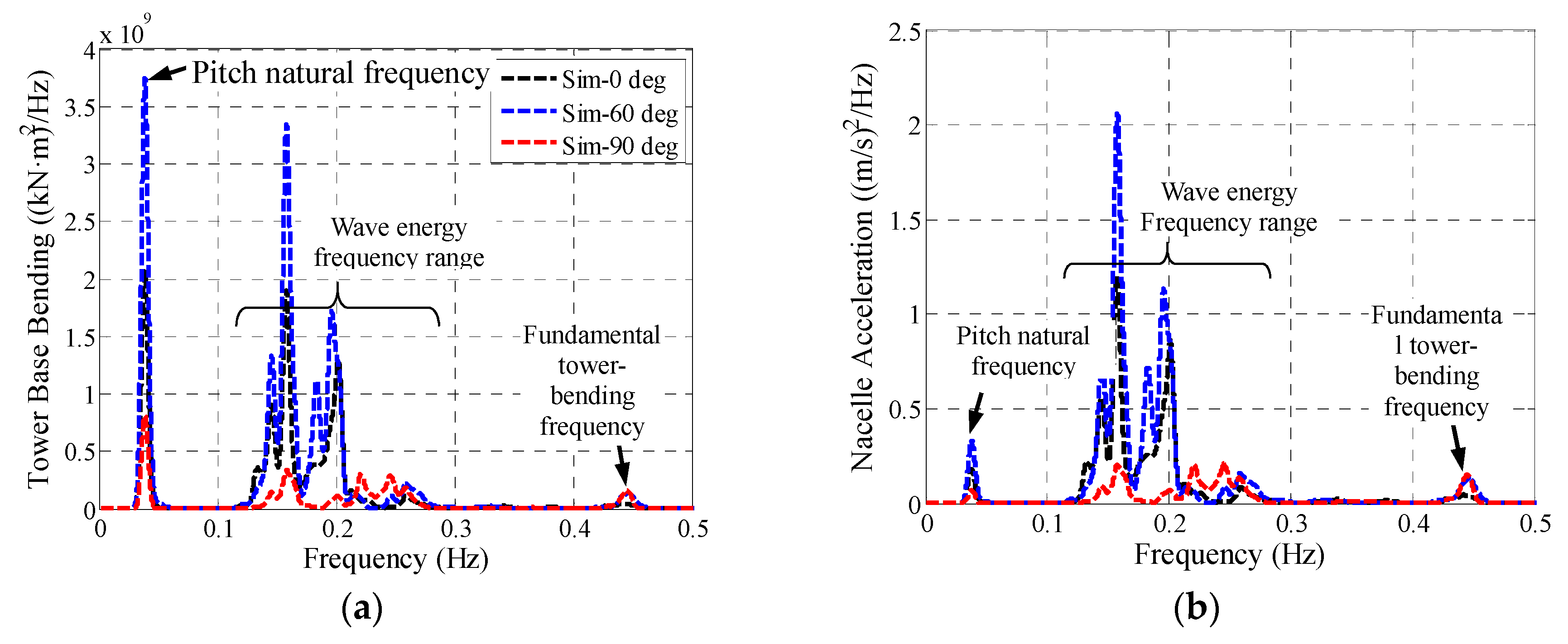
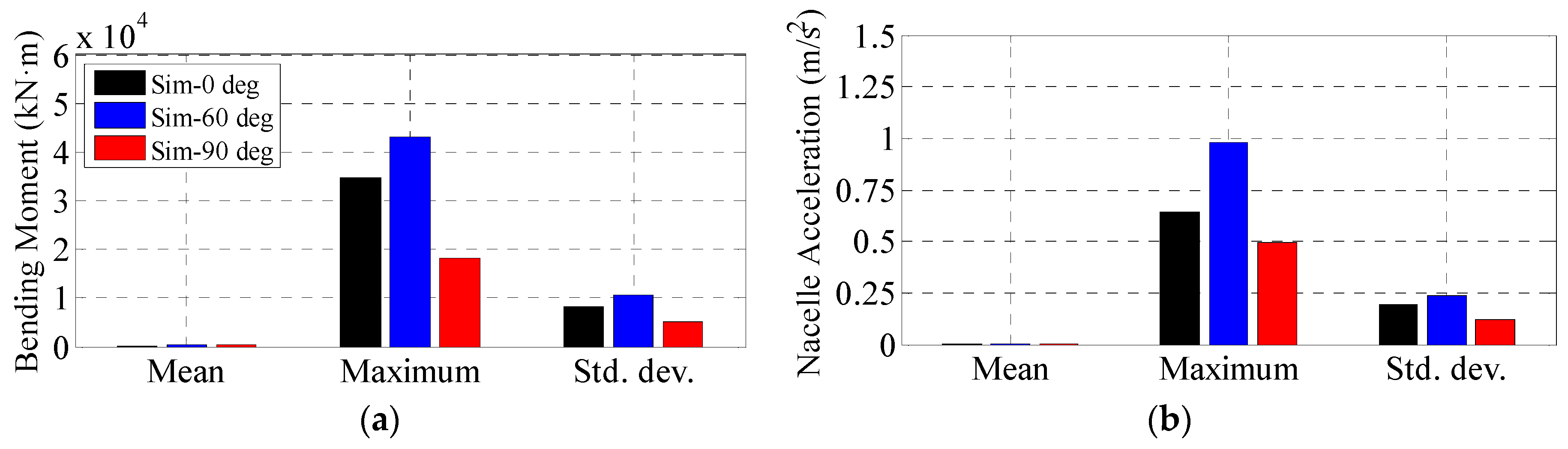
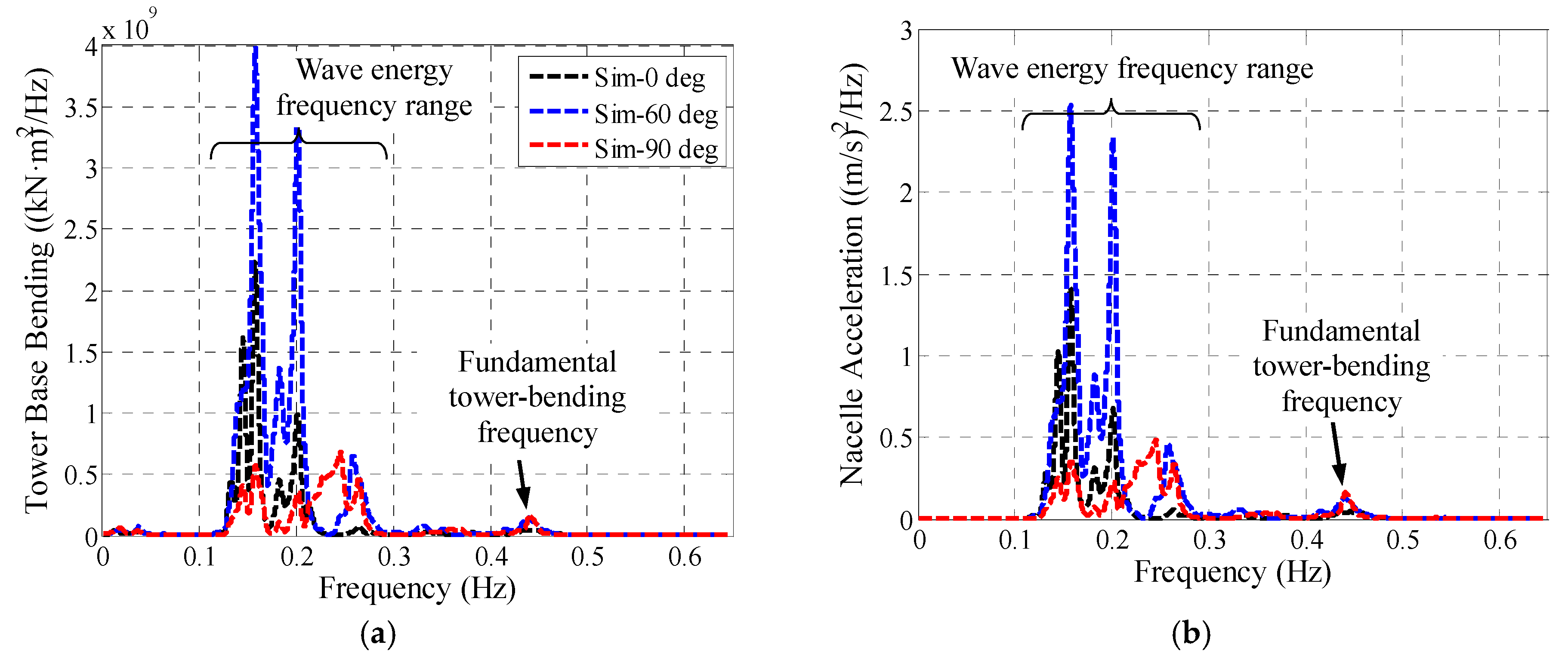
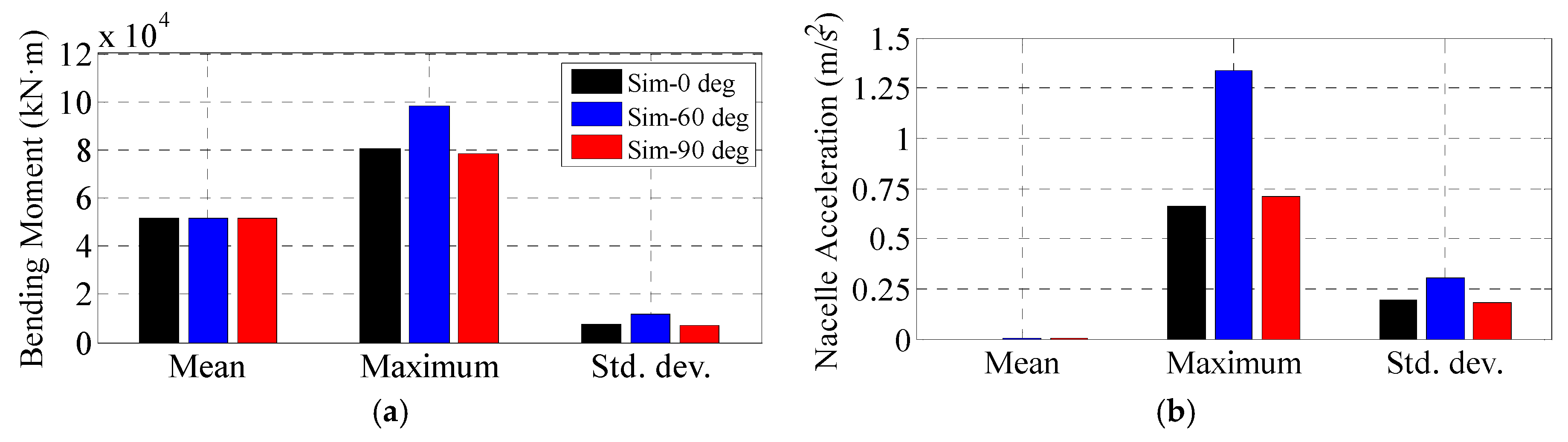
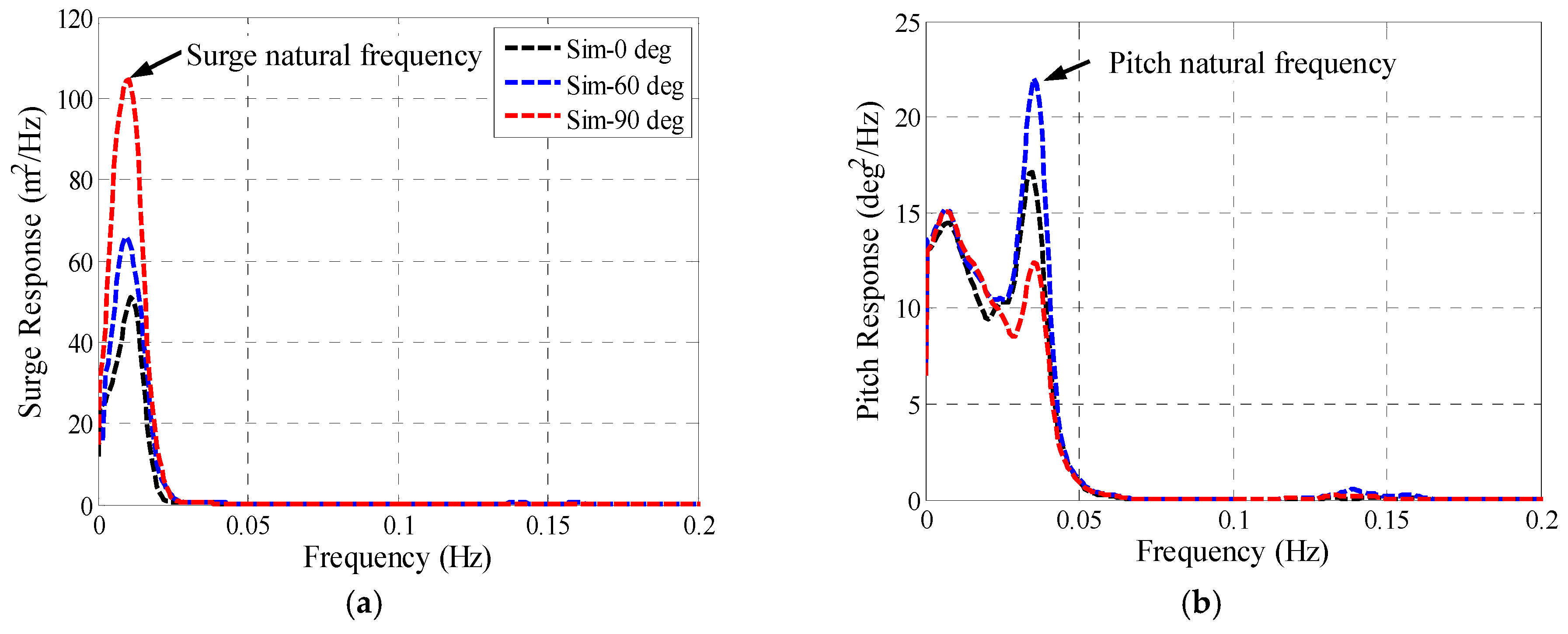
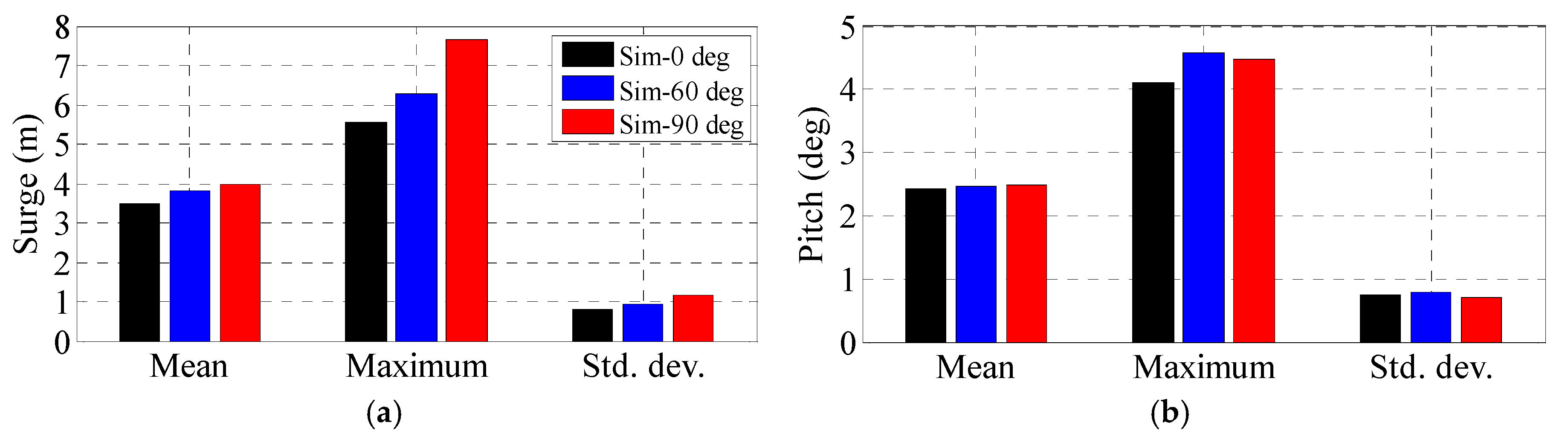
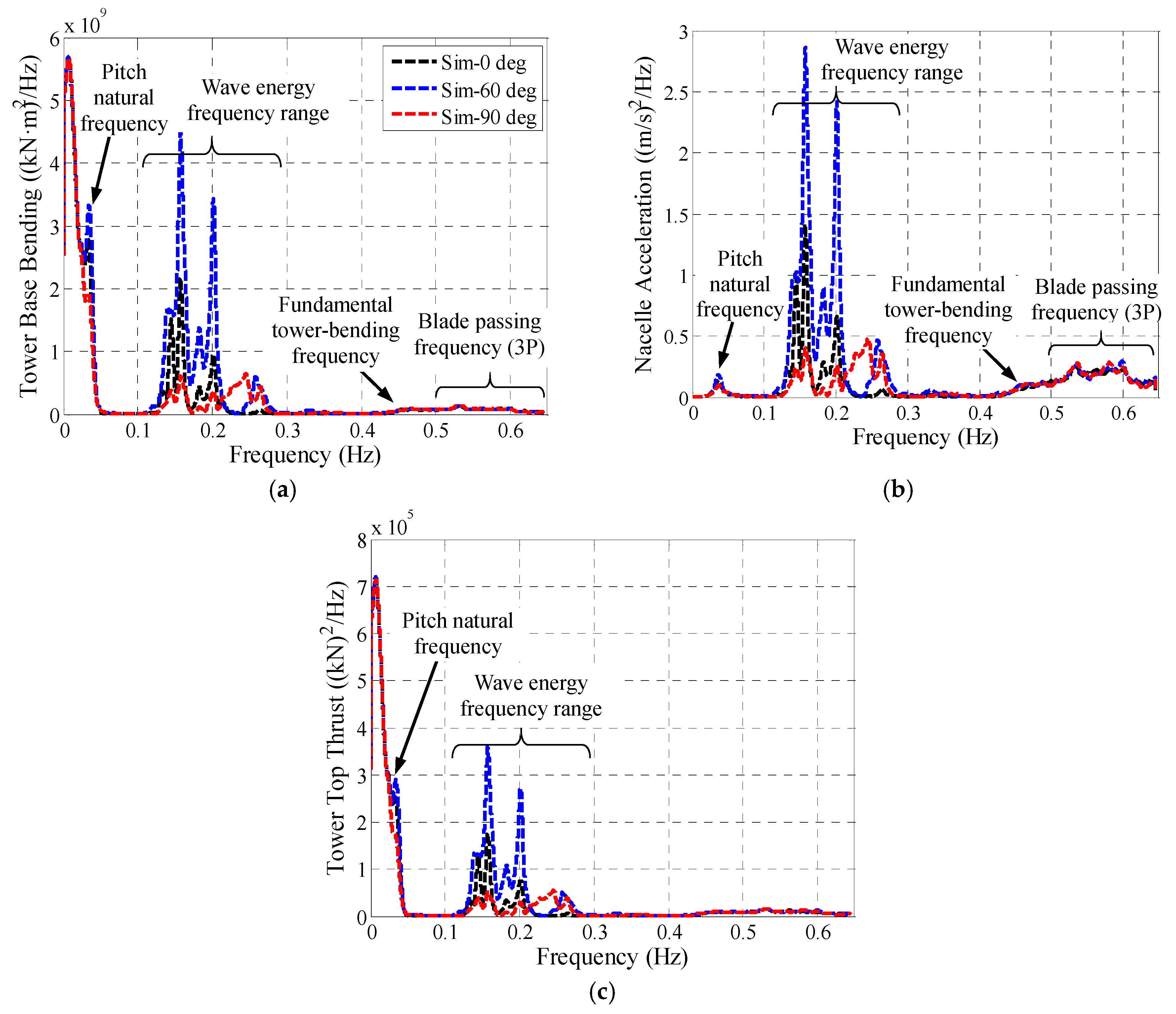
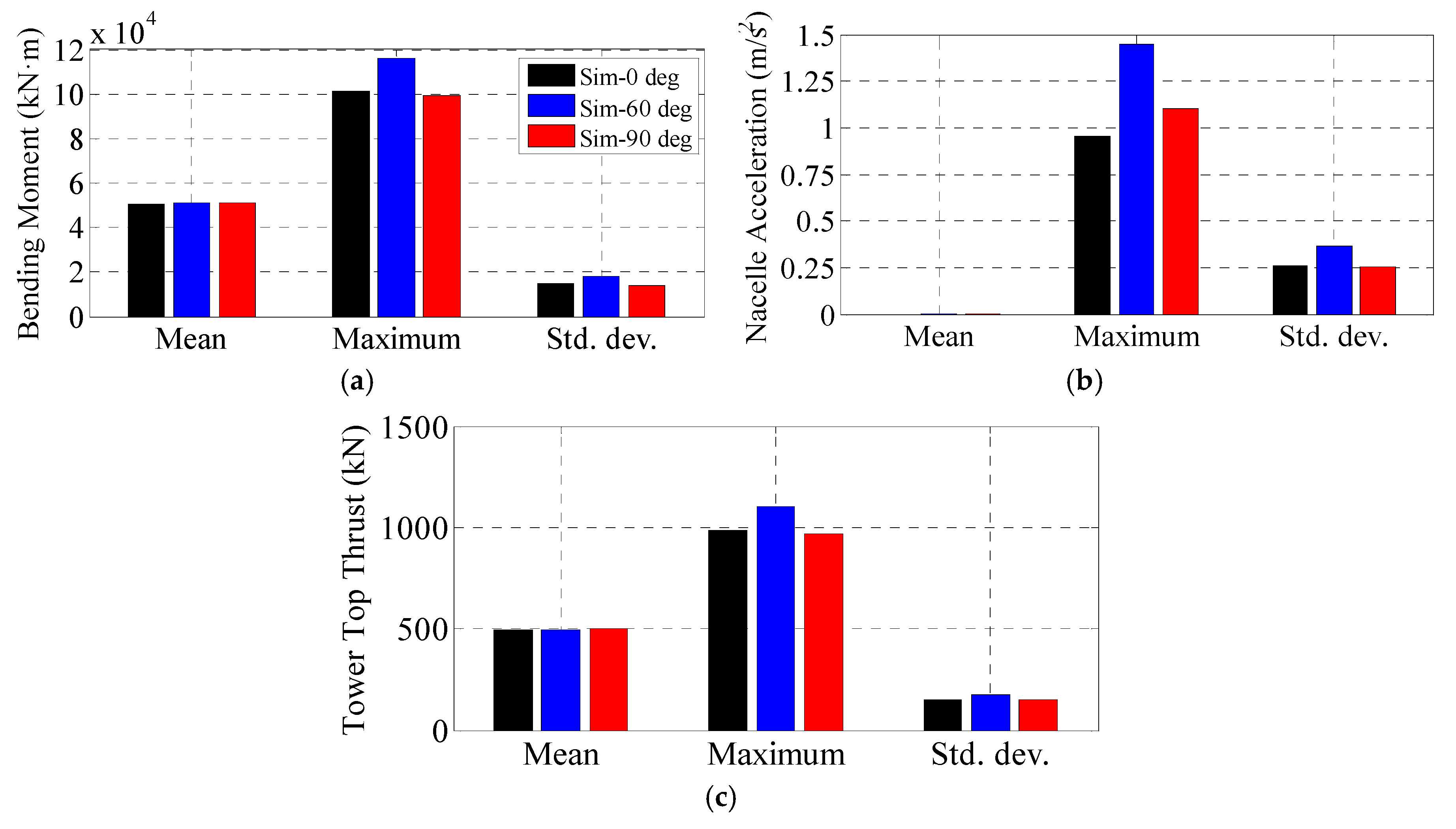
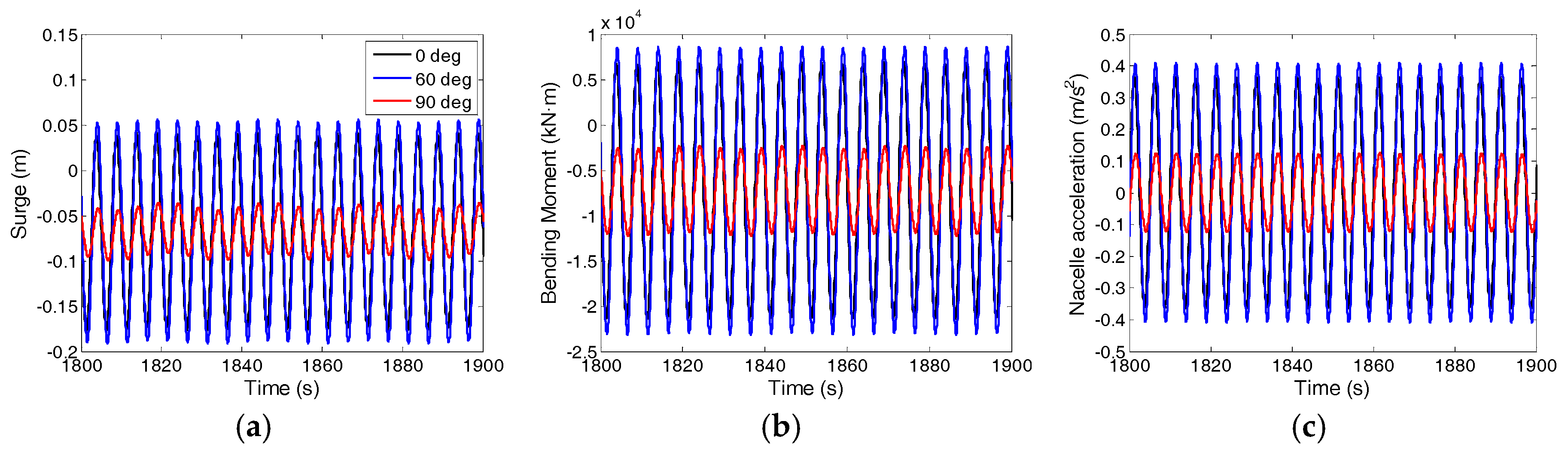
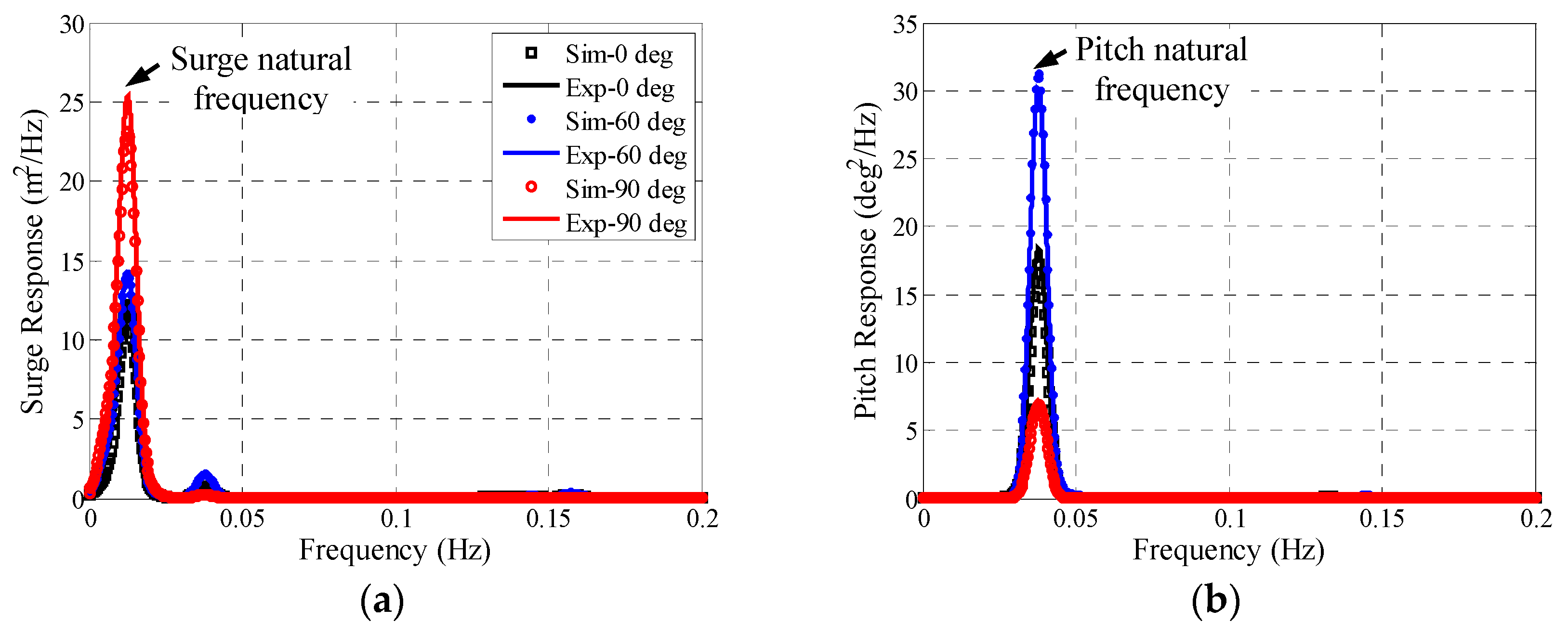
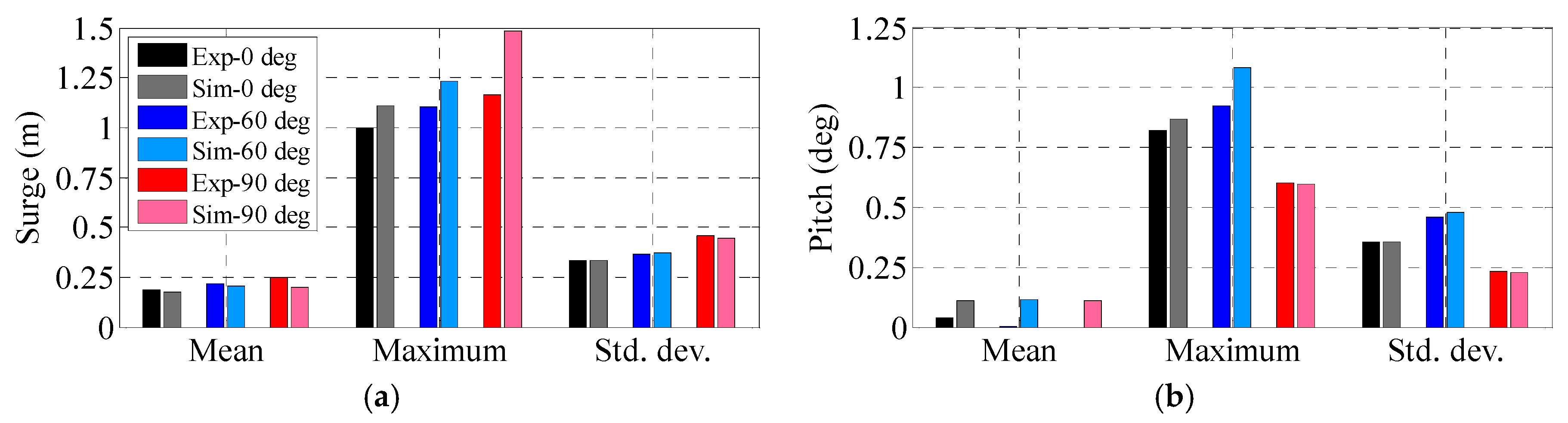
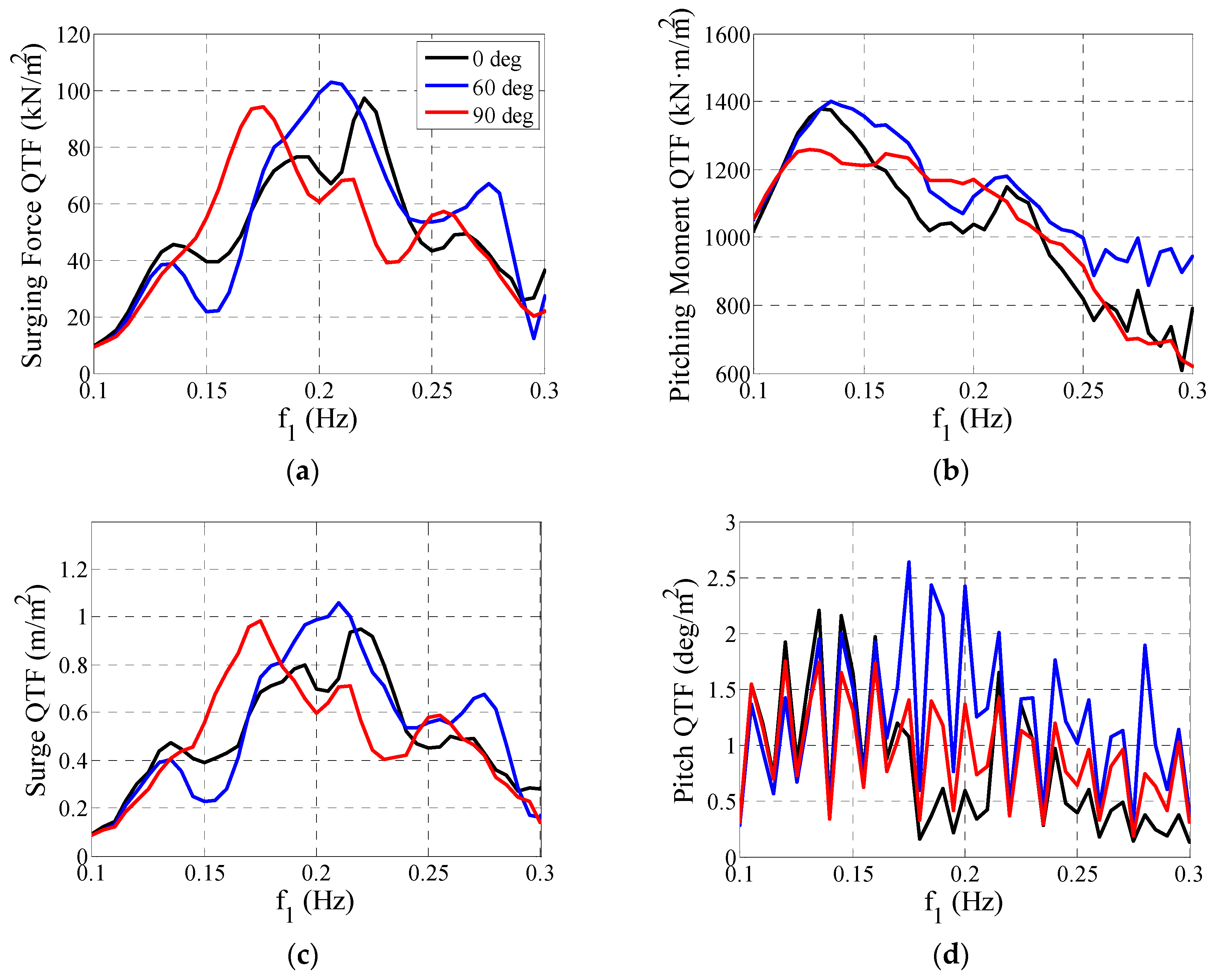
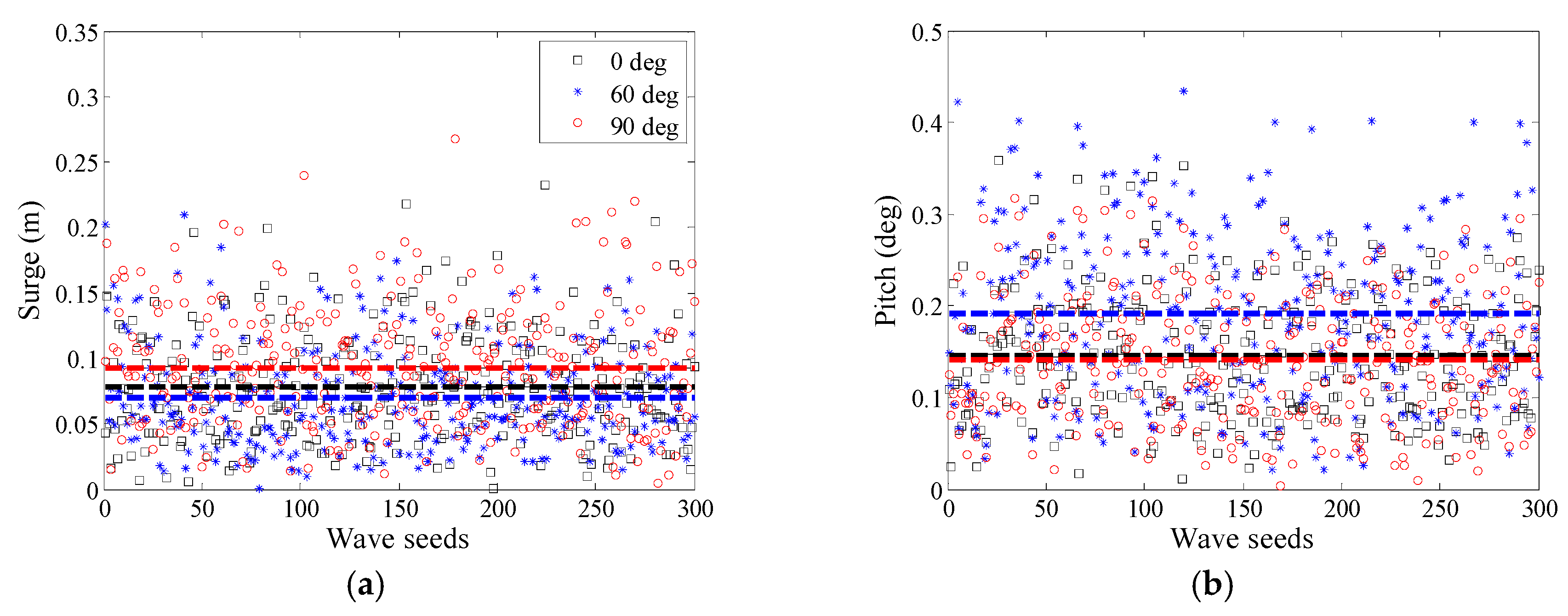
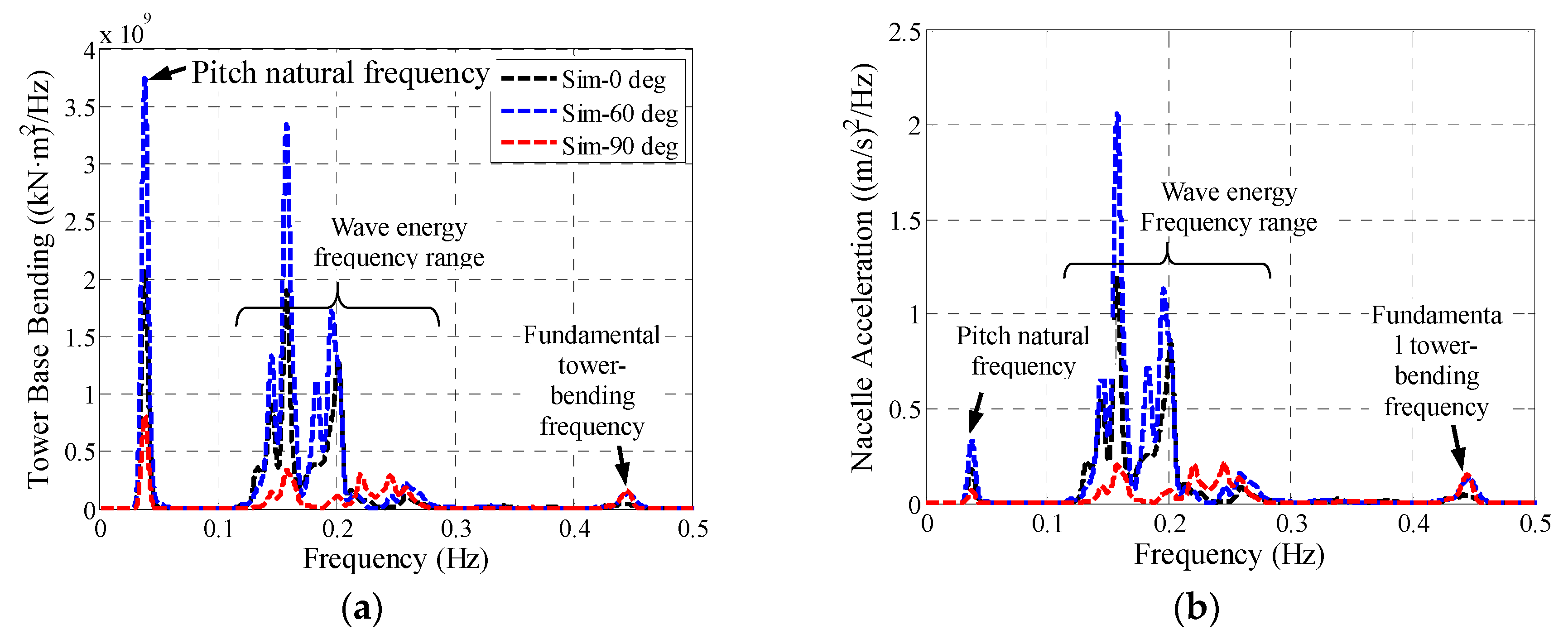
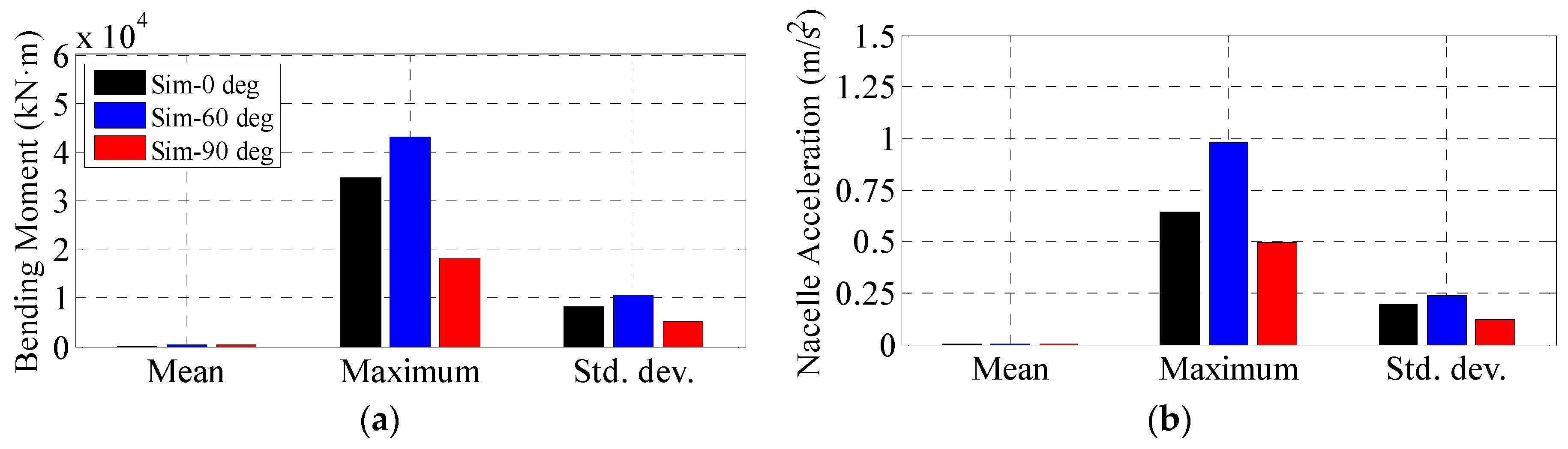
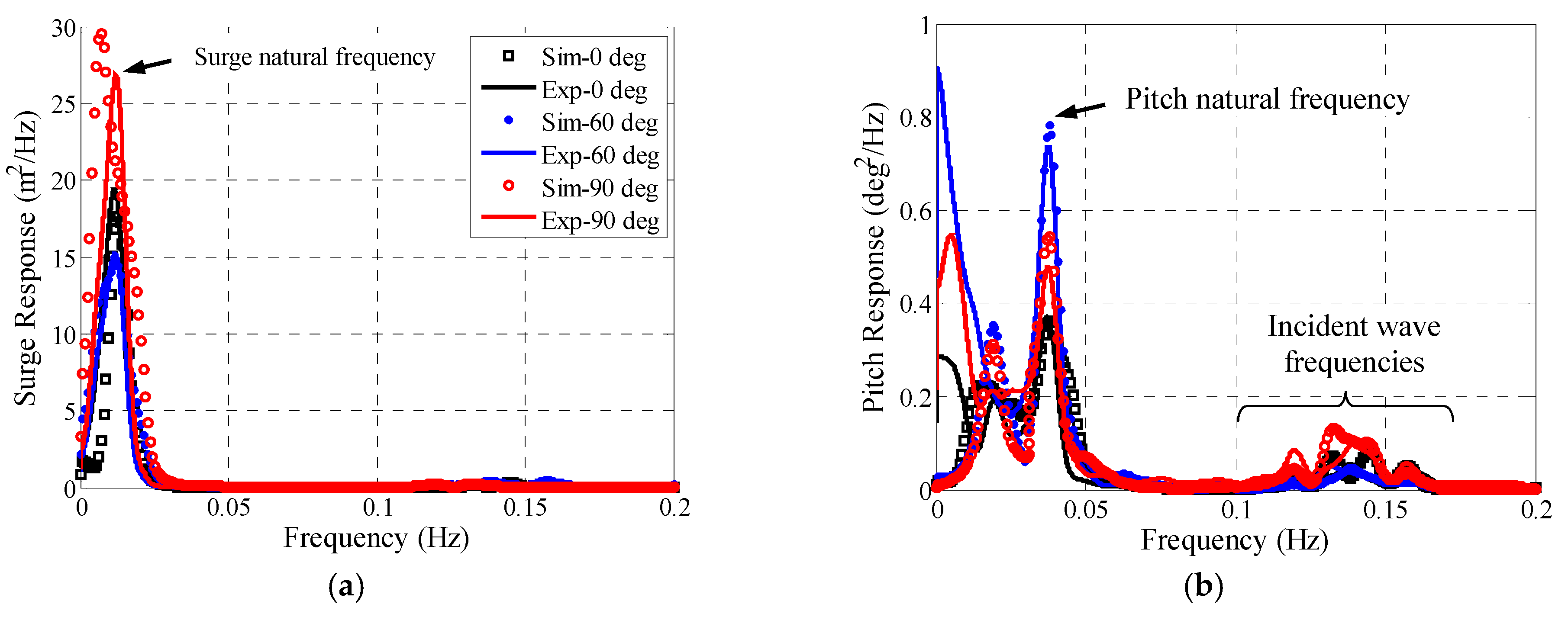
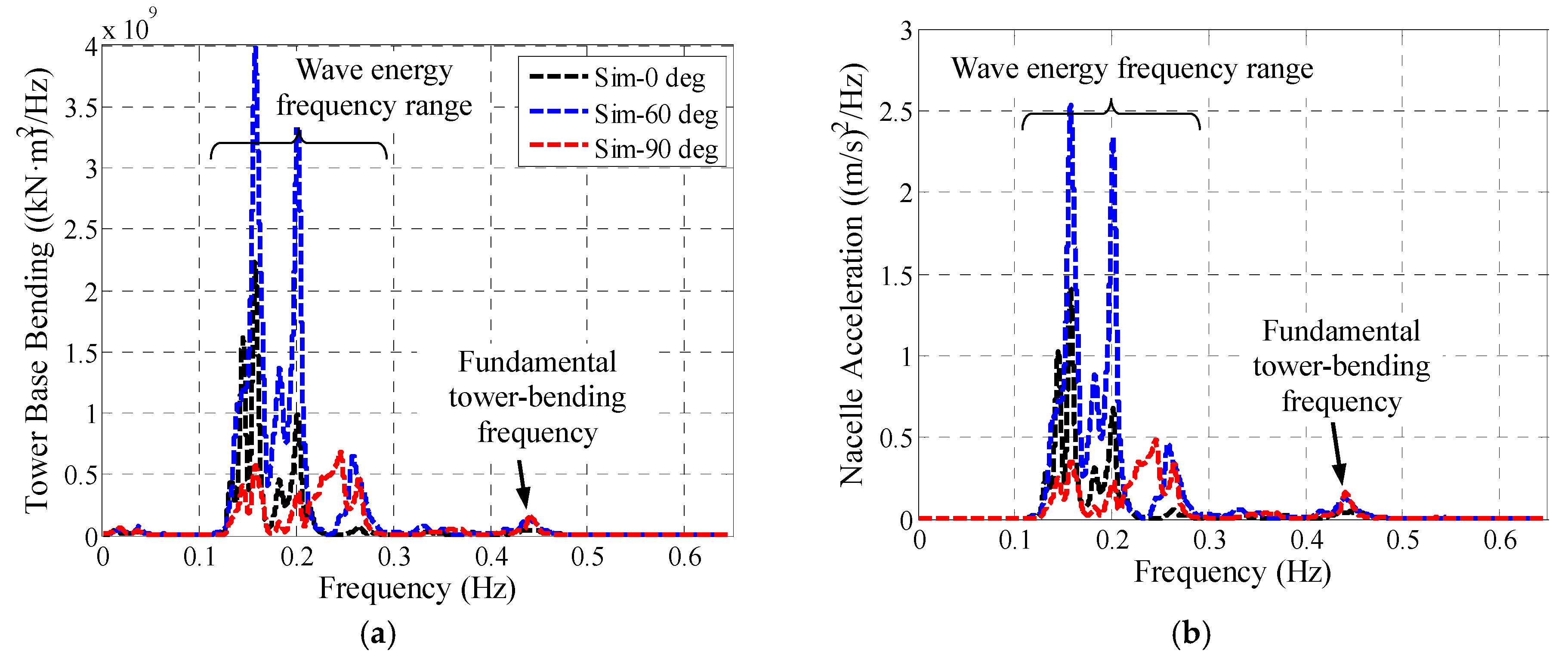
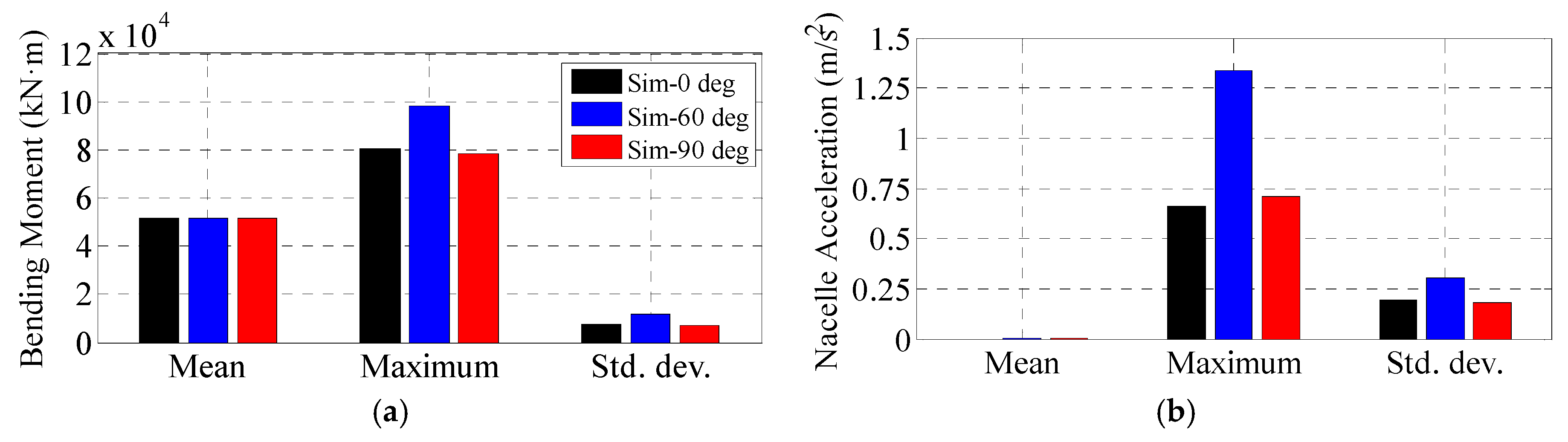
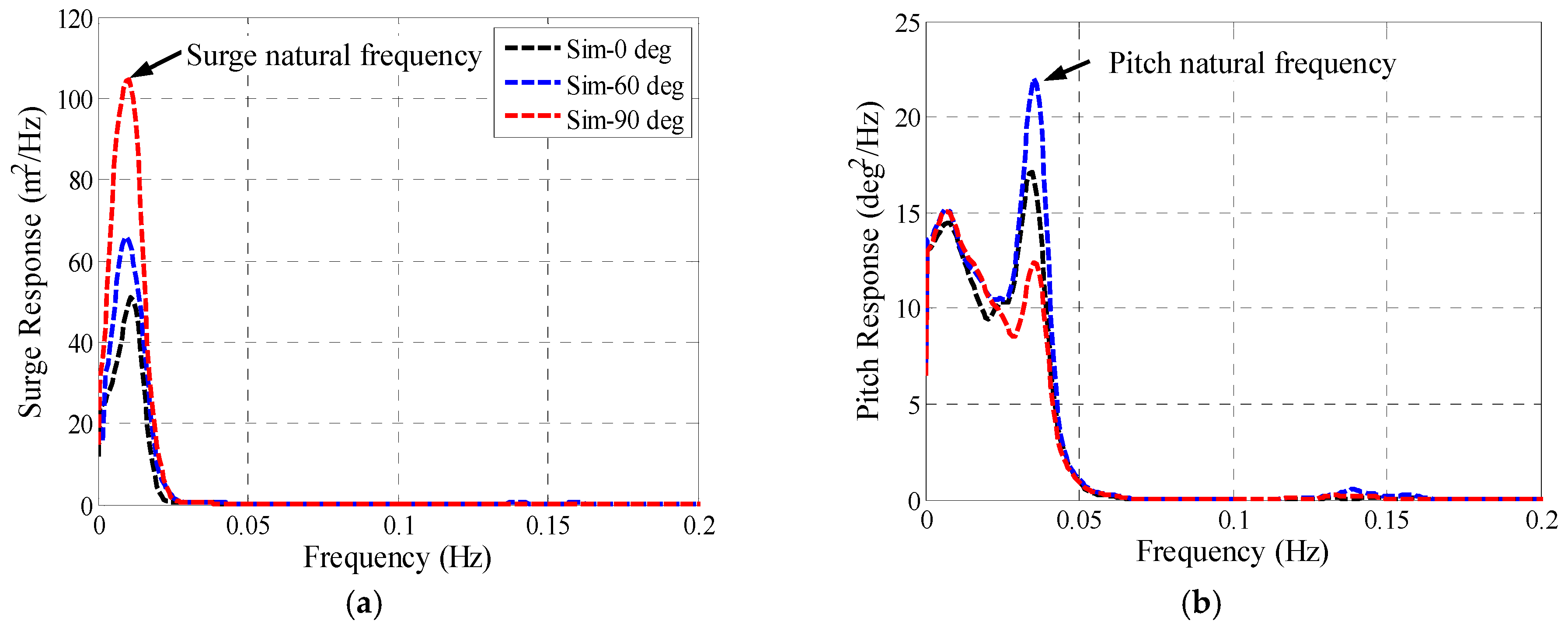
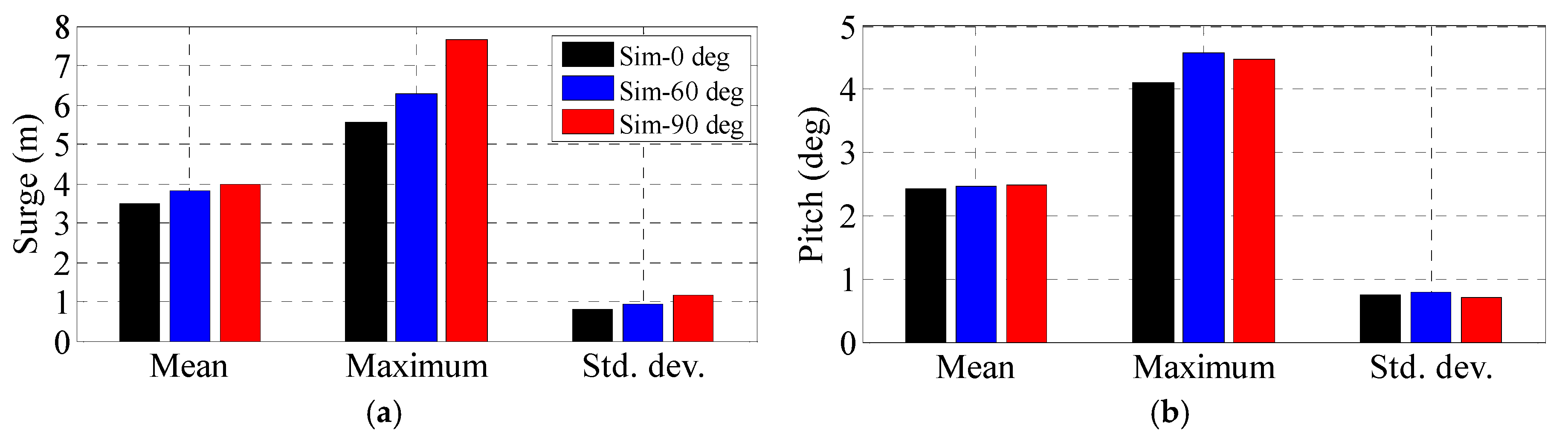
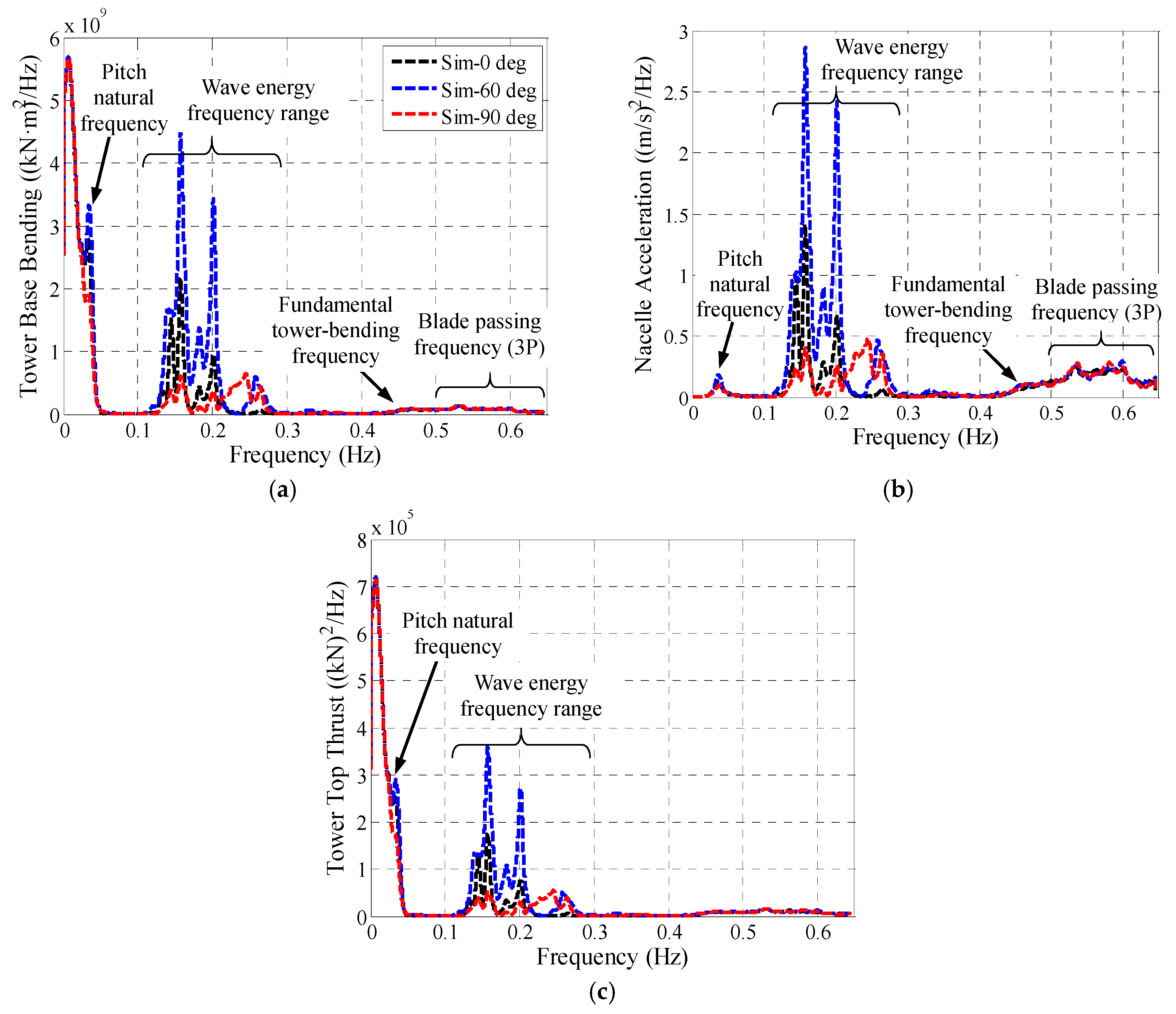
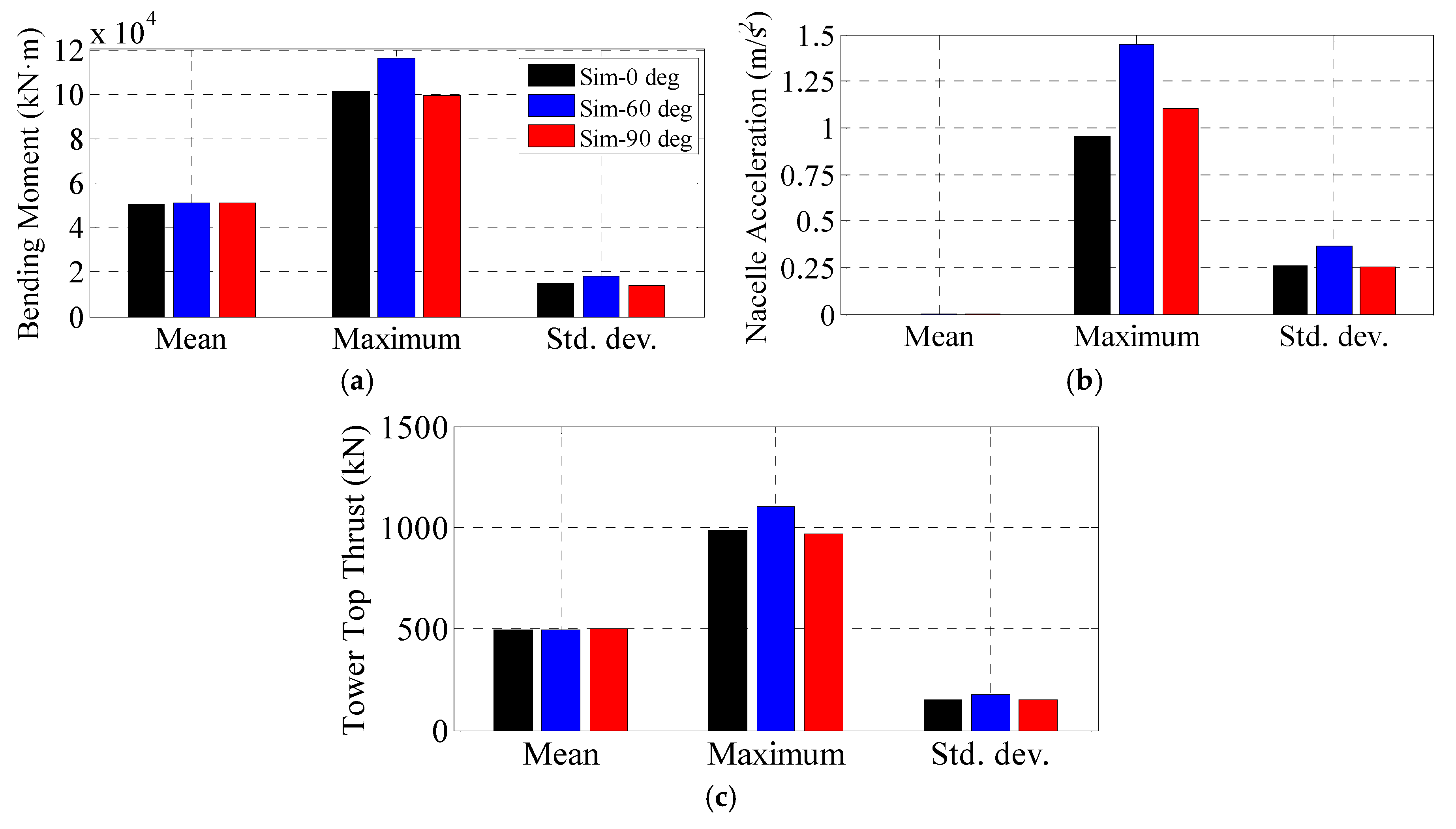
In irregular wave tests, resonant oscillations dominate the platform surge and pitch responses. Notable differences between wave headings are observed. The largest surge motion tends to occur in the 90° wave, while the largest pitch motion can always be found in 60°. The comparisons of the force as well as the motion QTF between the three wave directions demonstrate that it is the second-order hydrodynamic forces giving rise to these motion differences. In addition, the numerical models predict that the directions of stochastic waves also greatly affect the wind turbine dynamics. The largest and smallest fore-aft tower base bending moment/nacelle acceleration always occur in the 60° and 90° wave respectively. Stochastic waves evoke the first- and second-order platform motions. Thereinto, the directionality distinctions of the first-order surge and the second-order pitch motions result in the different tower base loads/nacelle acceleration in the incident wave frequencies and the pitch natural frequency respectively.
For the combined wind and wave tests, the comparisons between the actual and the simplified models indicate that platform surge and pitch oscillations are augmented in the predominant frequency range of the fluctuating wind. Nevertheless, the primary cause of the motion differences between load directions still lies in the second-order hydrodynamic forces. With regard to the tower base loads and the nacelle acceleration, the low-frequency and 3P oscillations can be excited by the turbulent wind and the rotating effect respectively, but these components do not contribute to the response differences between load directions. Instead, it is the directionality differences of the first-order hydrodynamic forces that lead to different tower base loads and nacelle acceleration.
On the whole, these findings indicate the directionality effects should be predetermined comprehensively before installation at sea, which is important for the operation and maintenance of the Y-shape floating wind turbines.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}