
Multi-Time Scale Control of Demand Flexibility in Smart Distribution Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
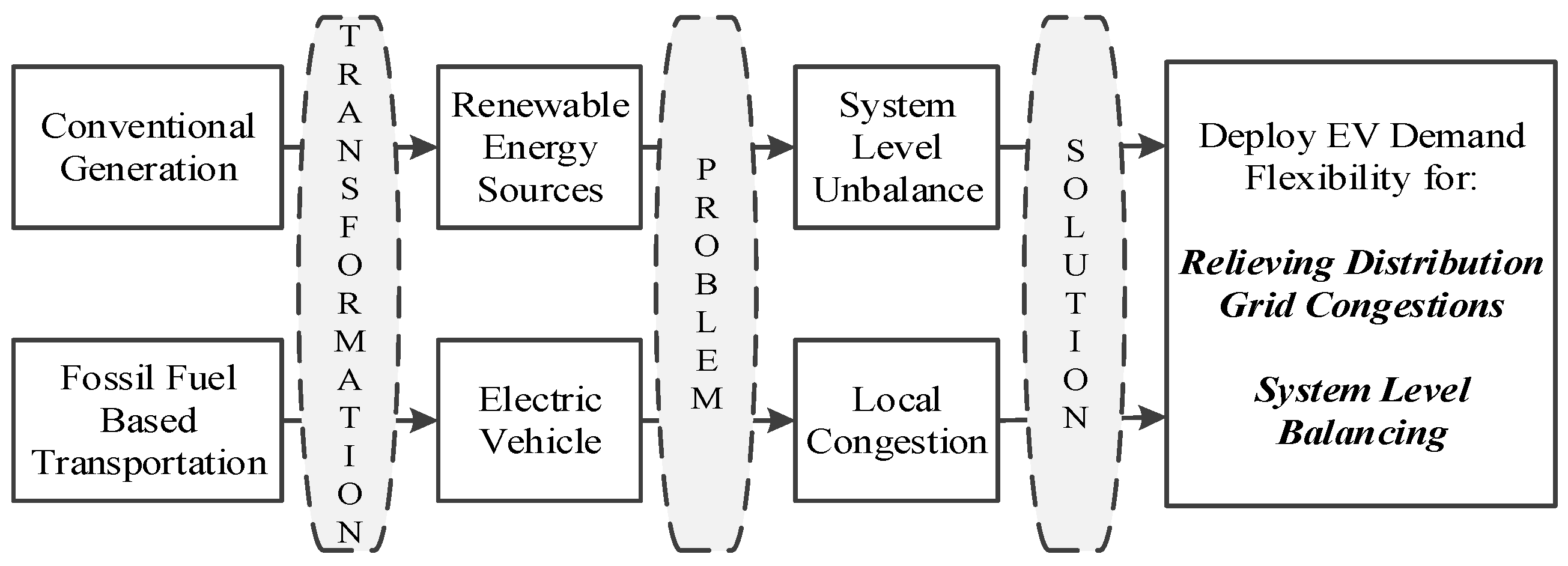
:1. Introduction
2. Recent Related Work
- (1)
- An optimum EV charging algorithm from EV owner, EV aggregator, and DSO perspectives, is developed and a coordination framework among them to apprehend their coordinative goal is designed.
- (2)
- A HCA consisting of scheduling, coordinative, and adaptive control layers is designed to ensure EV participation to day-ahead, balancing, and regulation markets.
- (3)
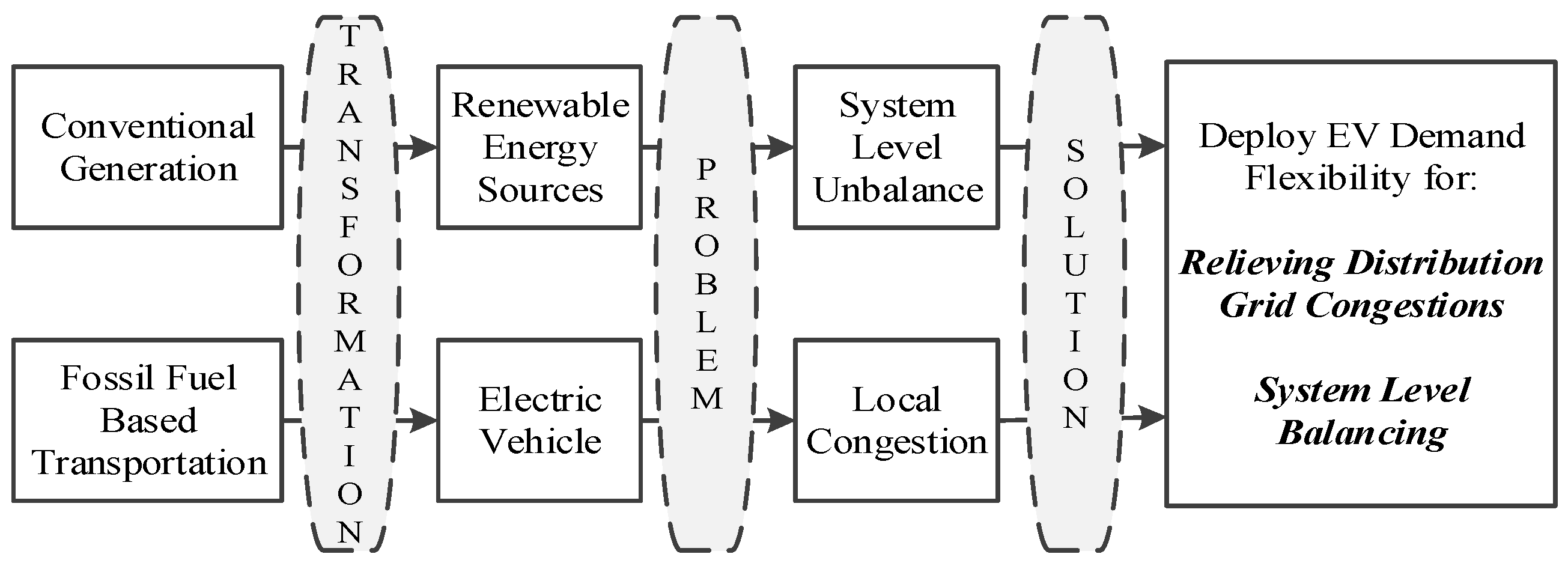
- A multi-time scale control that works from a day-ahead scheduling up to real-time control is proposed to simultaneously utilize EV flexibilities for solving both grid balancing and network congestions management.
3. Modeling and Characterization of Electric Vehicle
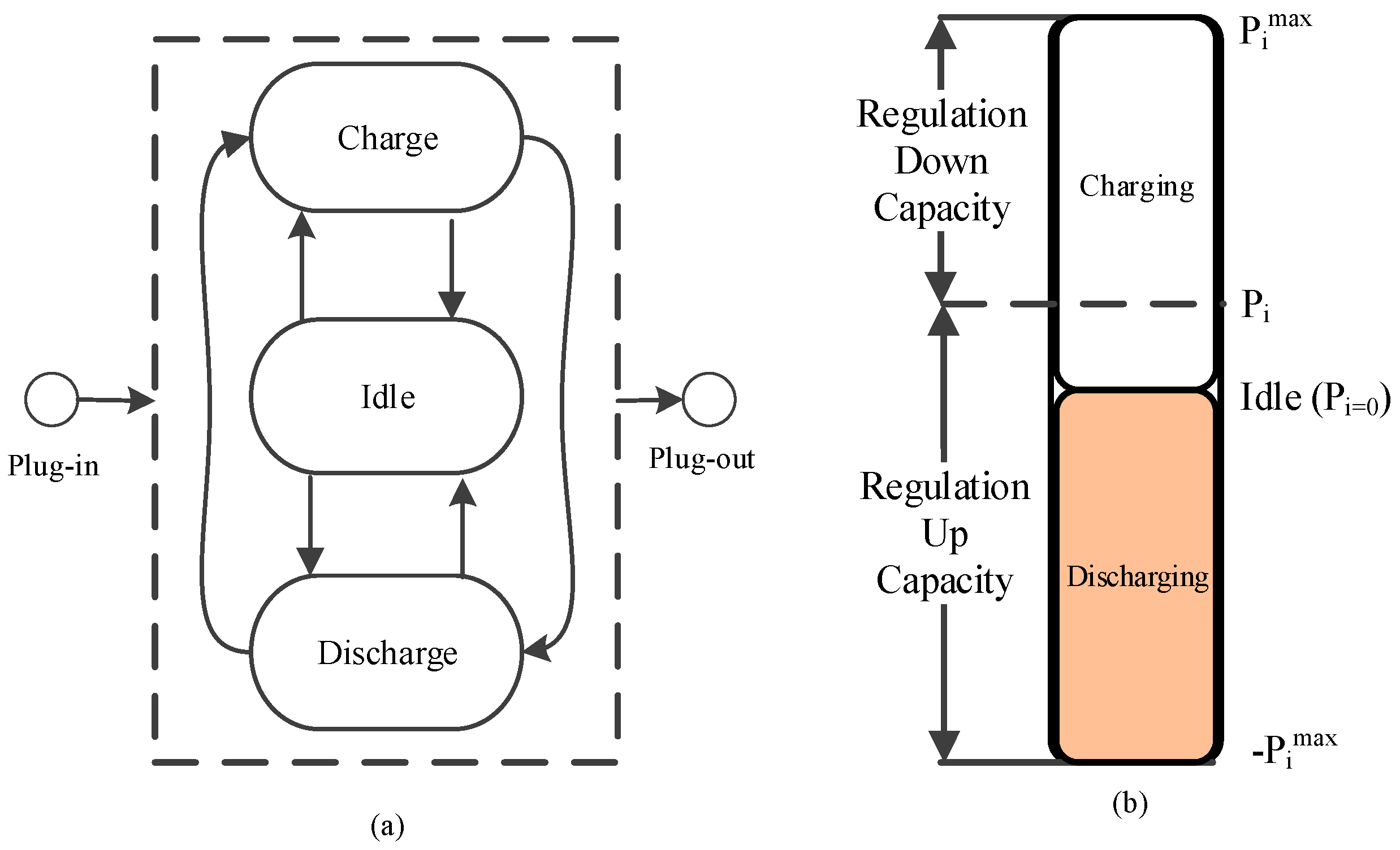
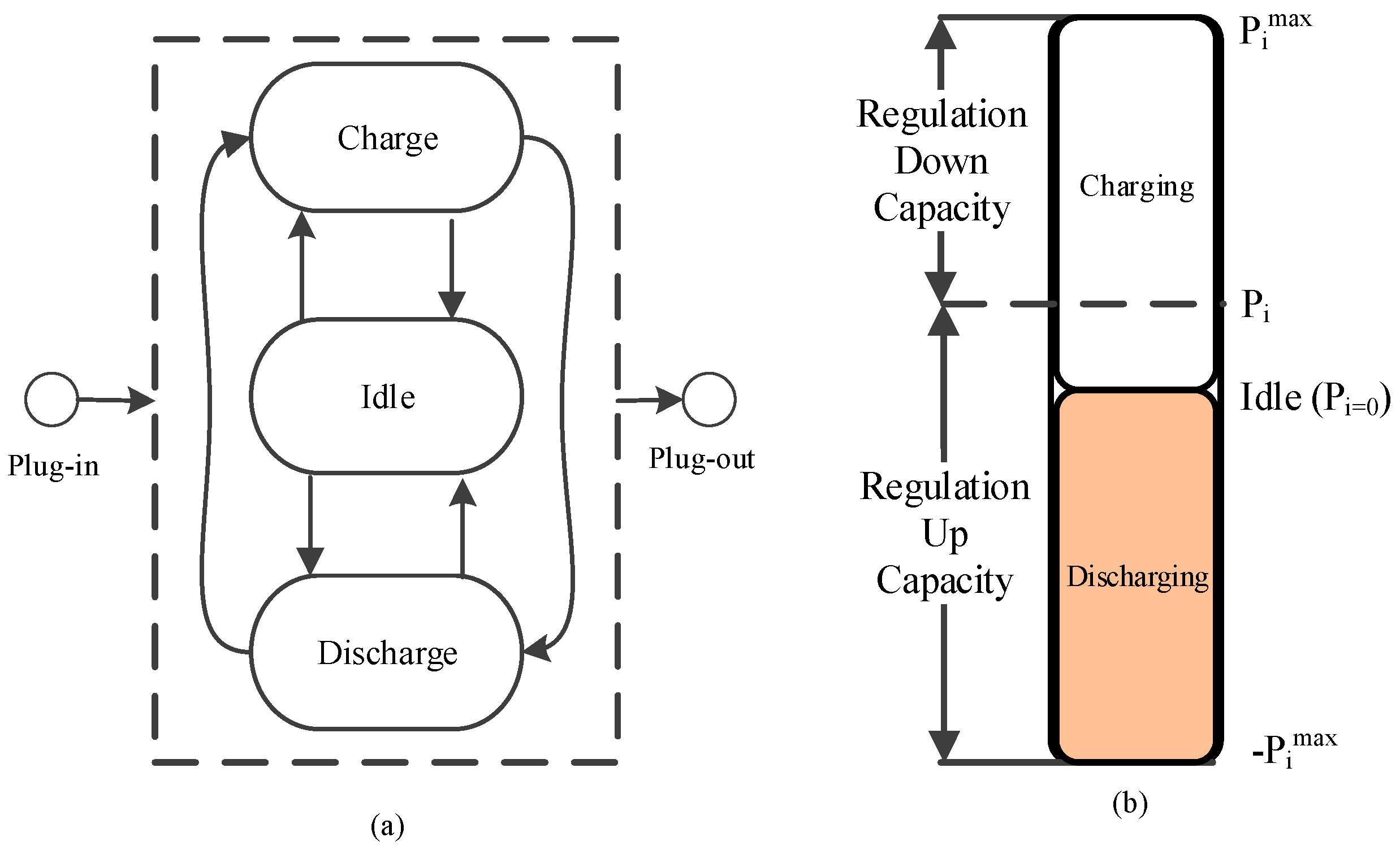
3.1. Electric Vehicle Modeling
3.1.1. Charging
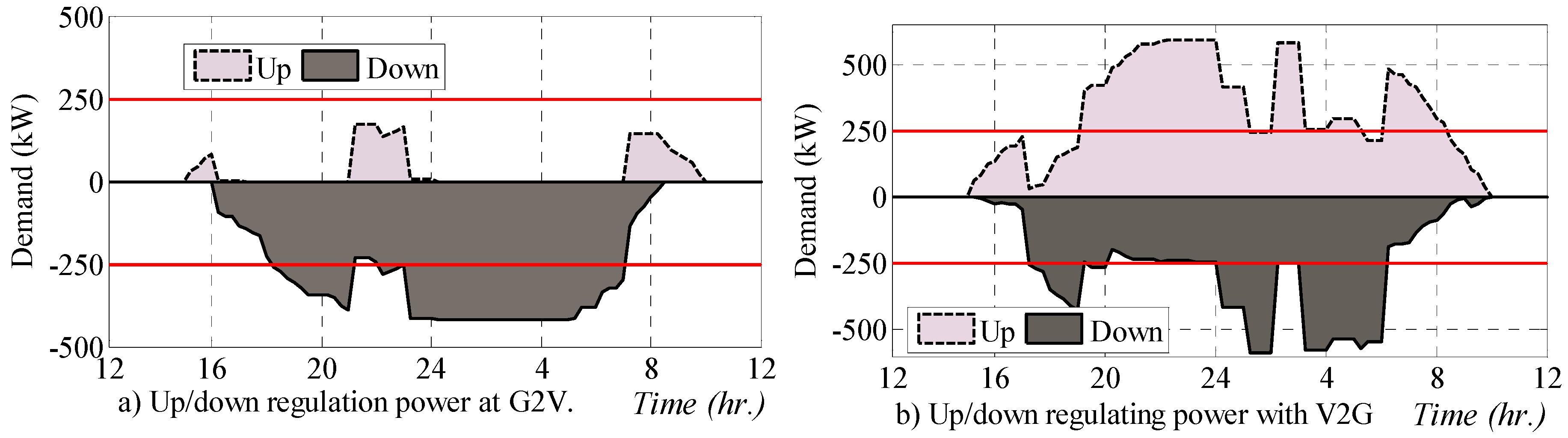
3.1.2. Discharging
3.1.3. Idle
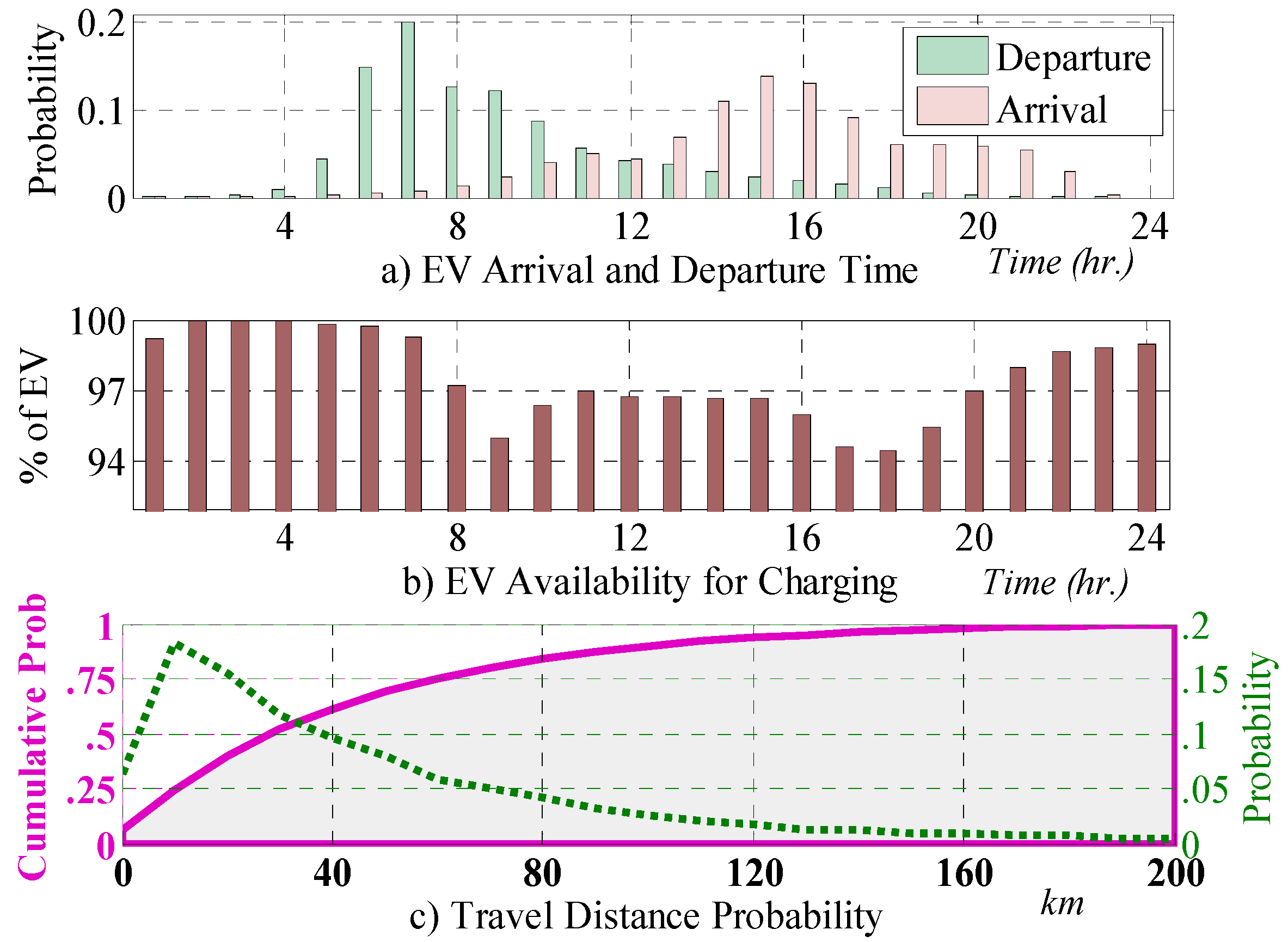
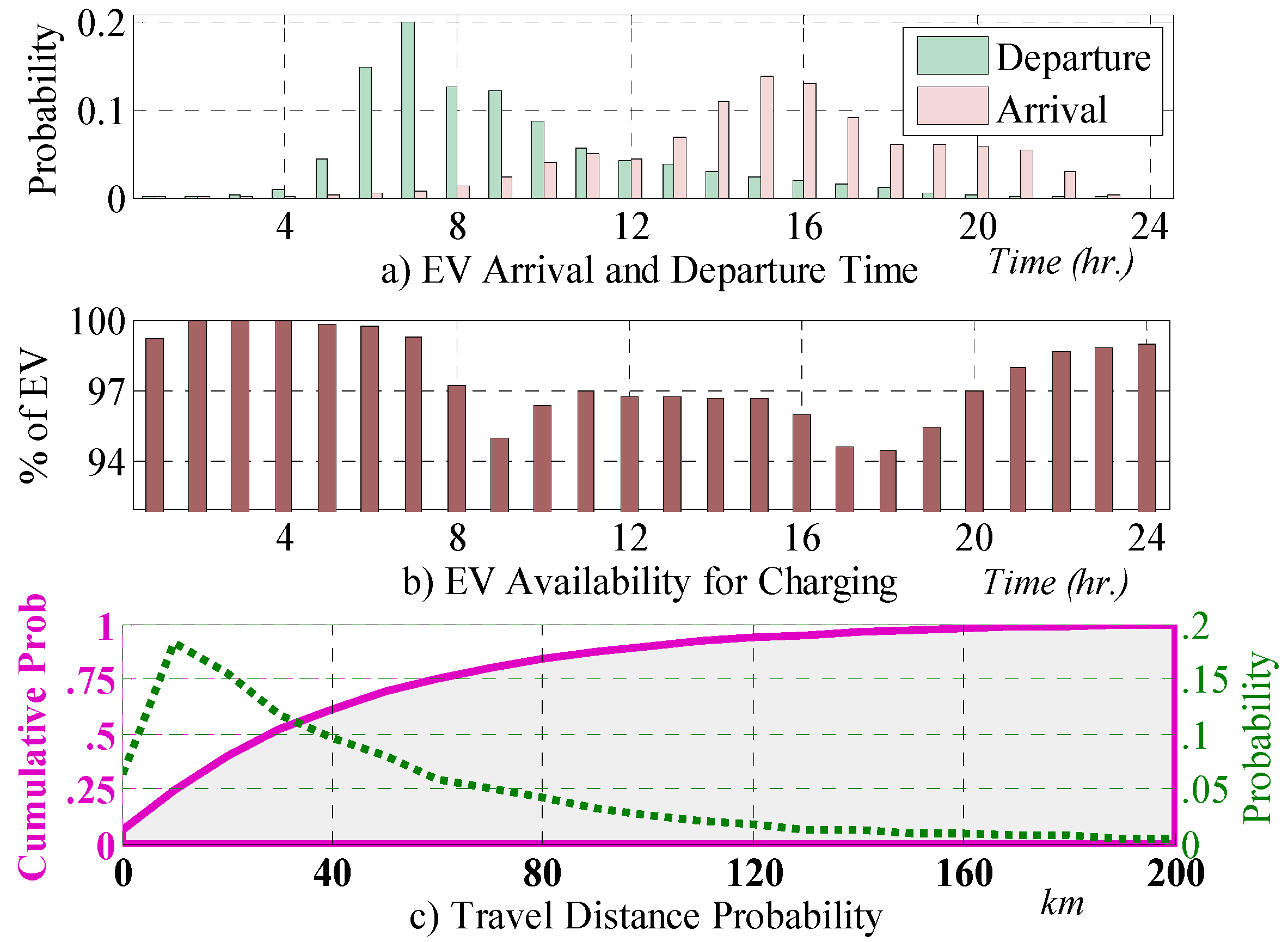
3.2. Electric Vehicle Driving Characteristics
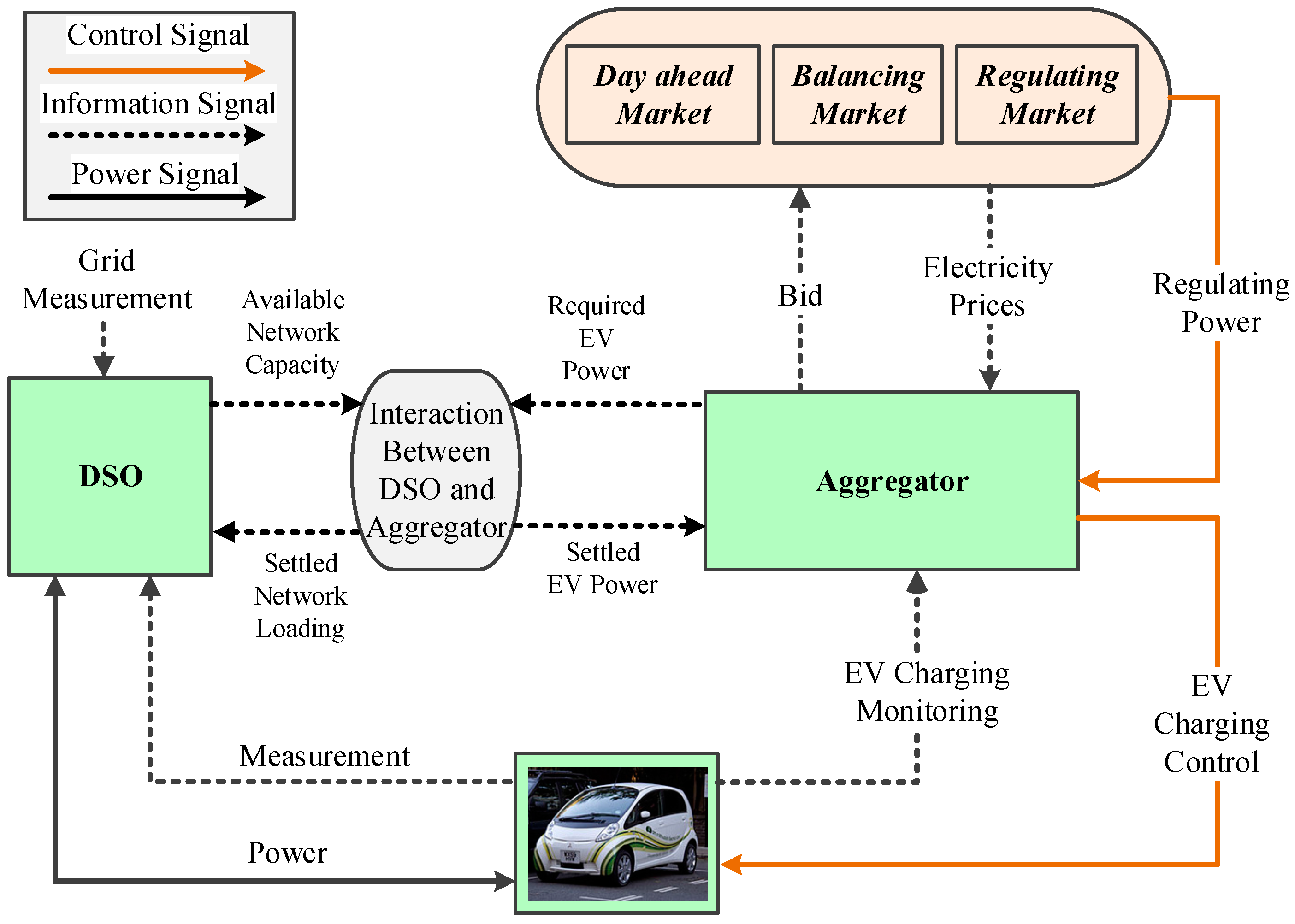
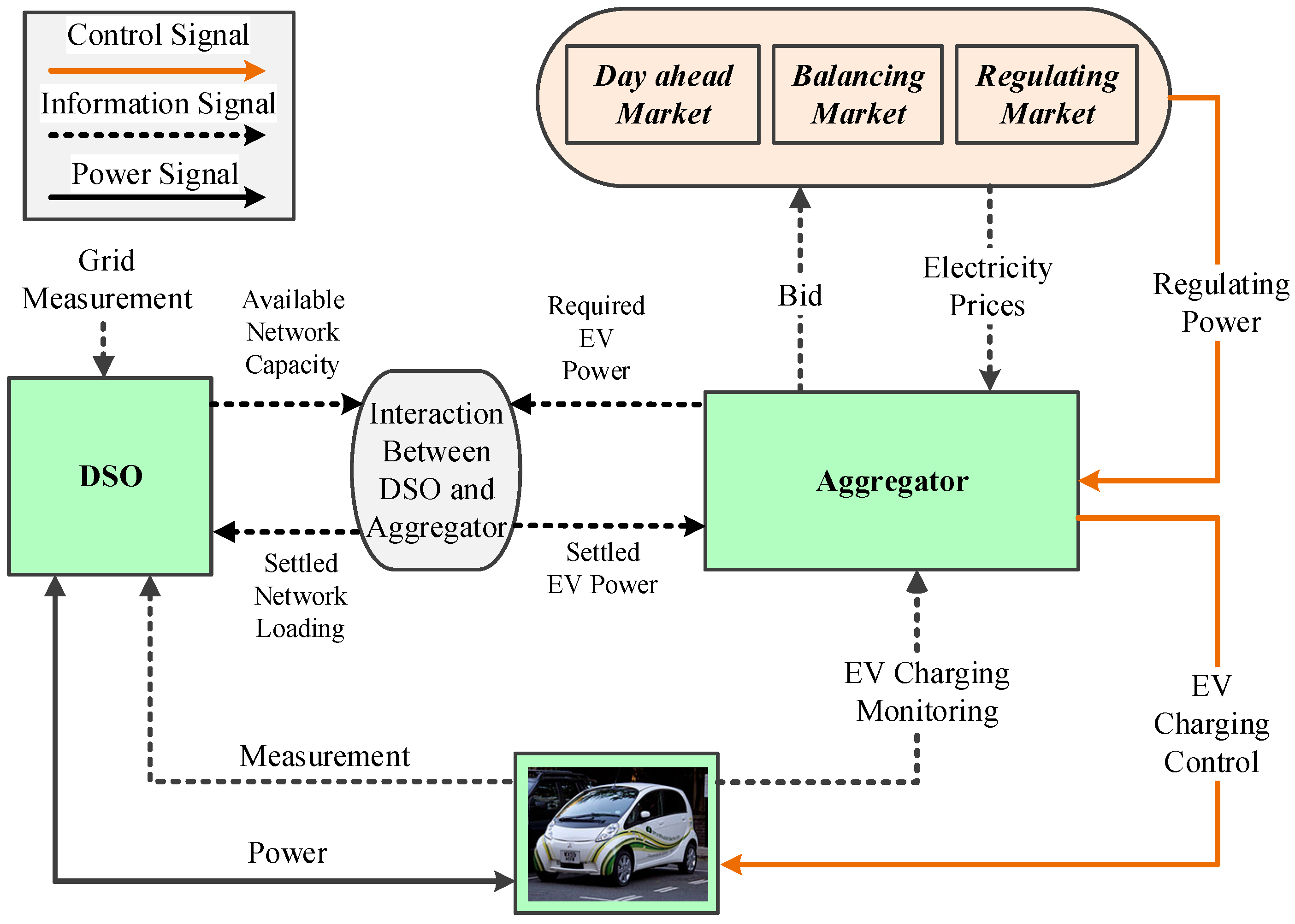
3.3. Electric Vehicle Charging Framework
- Aggregator-Consumer: The interaction between aggregator and consumer is realized through a common goal of charging cost minimization. While doing so, aggregator initiates EV charging control strategies with simultaneous assurance of travel requirement of each EV.
- Aggregator-DSO: Interaction with DSO is realized through a common aim to avoid local grid congestions management. Aggregator and DSO communicate back and forth to settle charging power without jeopardizing the network constraints.
- Aggregator-BRM: Aggregator bids to BRM with aggregated regulation capabilities of EVs. The primary responsibility of the aggregator is to ensure committed ancillary services and the objective is to maximize benefit from its participation to BRM.
- Aggregator-Day-ahead Market: While interacting with day-ahead market, aggregator bids energy for EV charging and in return acquires hourly electricity price.
4. Electric Vehicle Charging from Multiple Actors Perspective
4.1. Consumer Perspective
4.2. Distribution System Operator Perspective
4.3. Electric Vehicle Aggregator Perspective
4.4. Coordinative Goal of Consumer, Distribution System Operator, and Aggregator
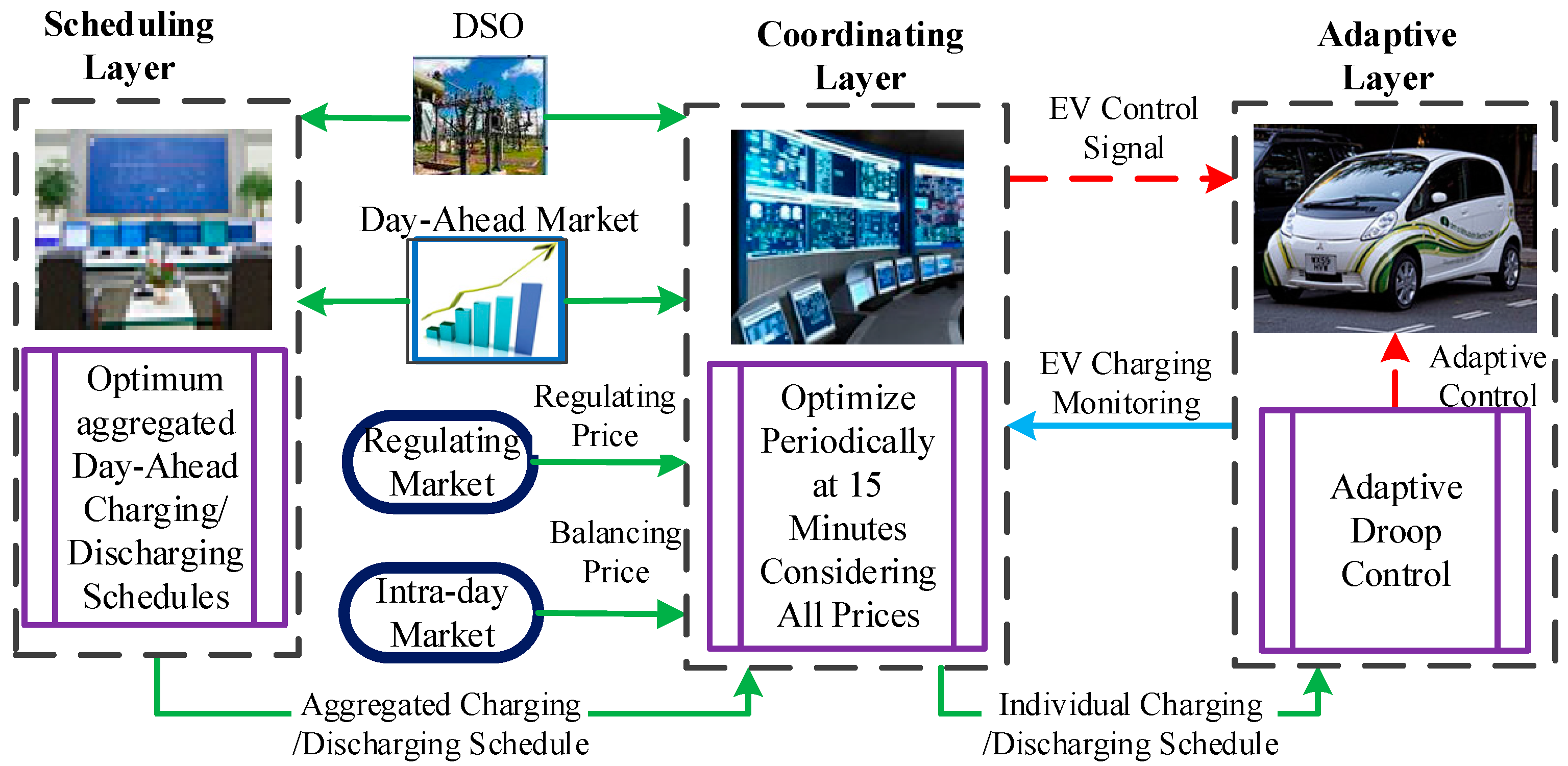
5. Hierarchical Coordinated Electric Vehicle Charging
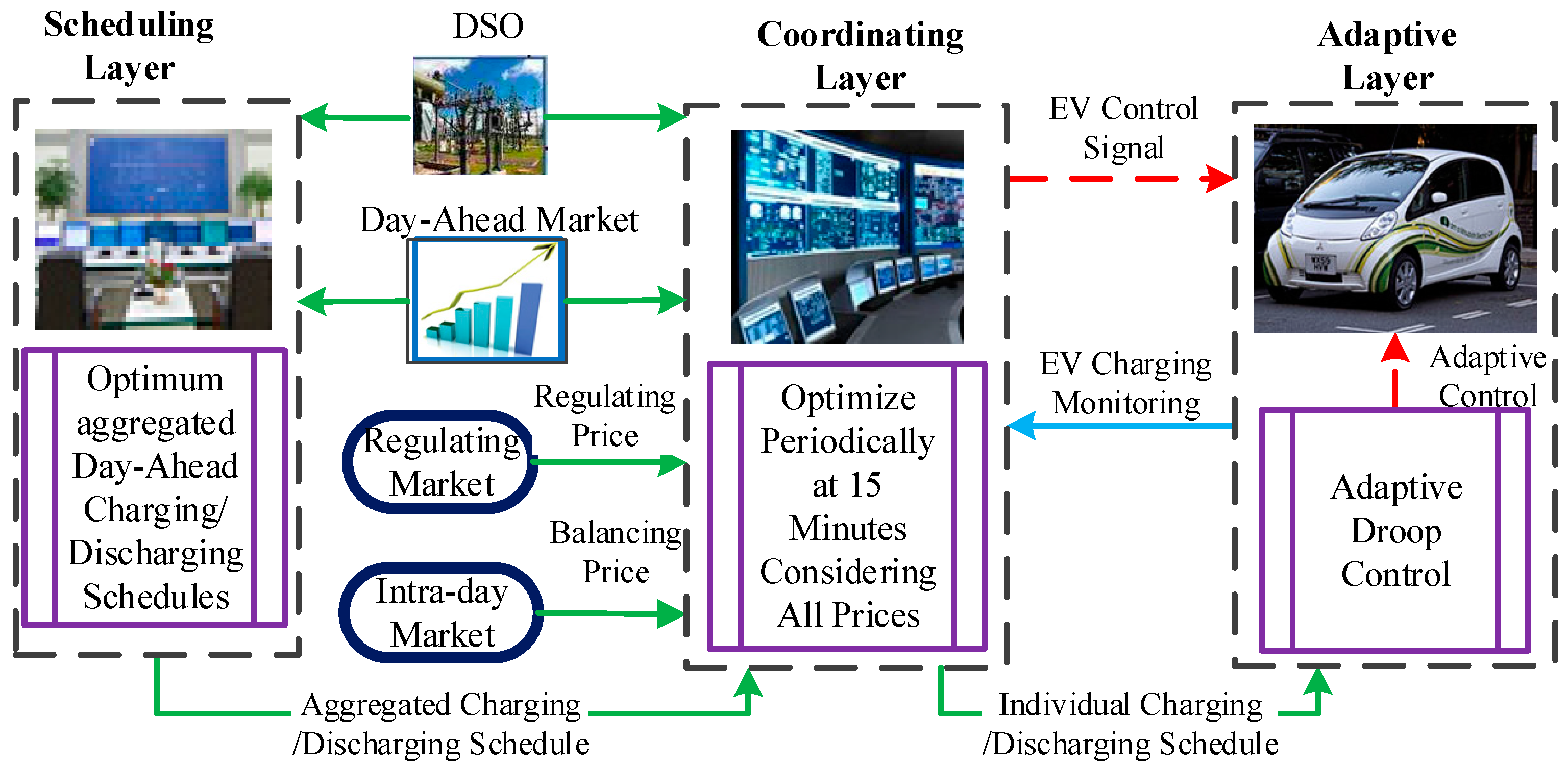
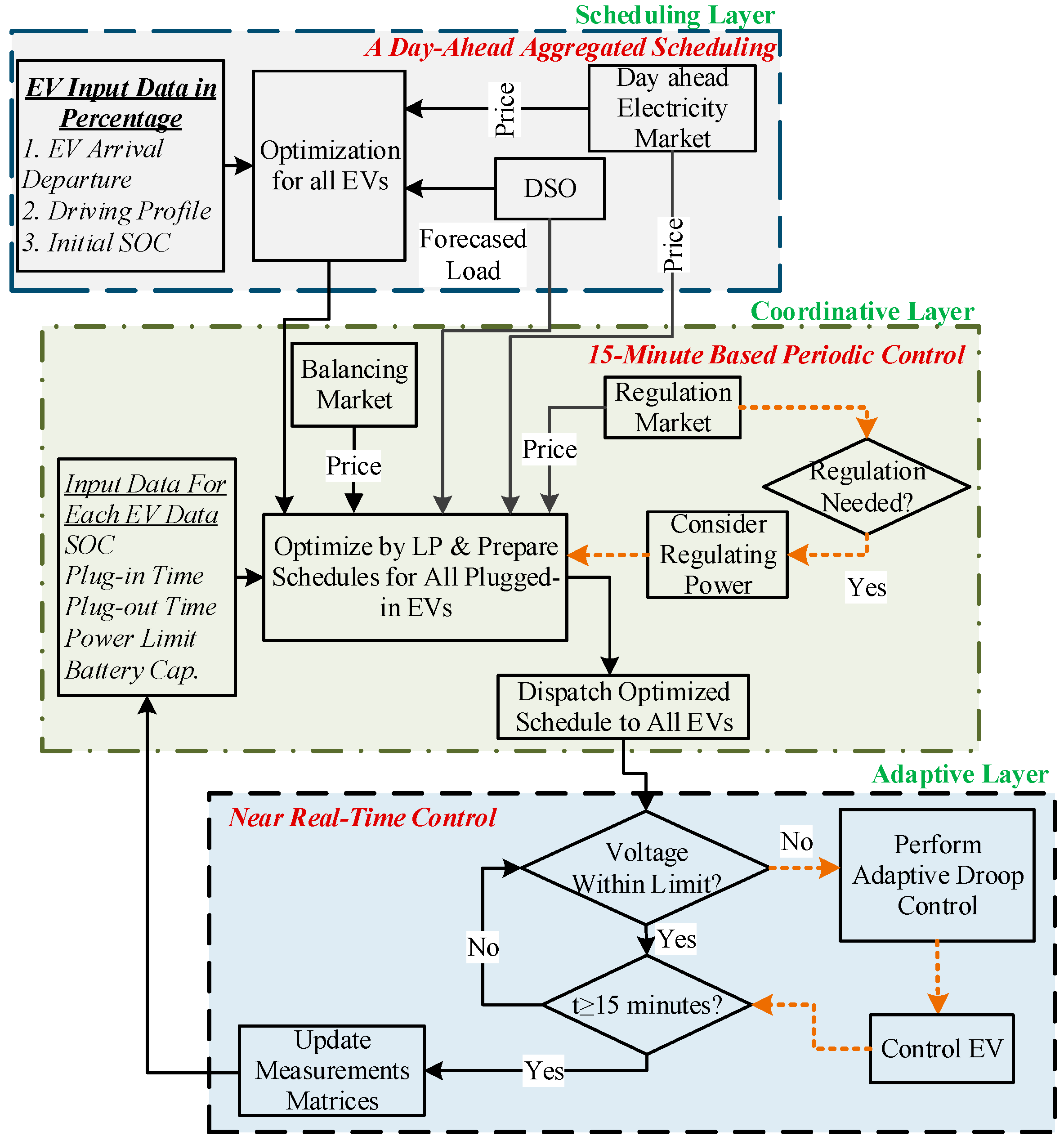
5.1. Scheduling Layer
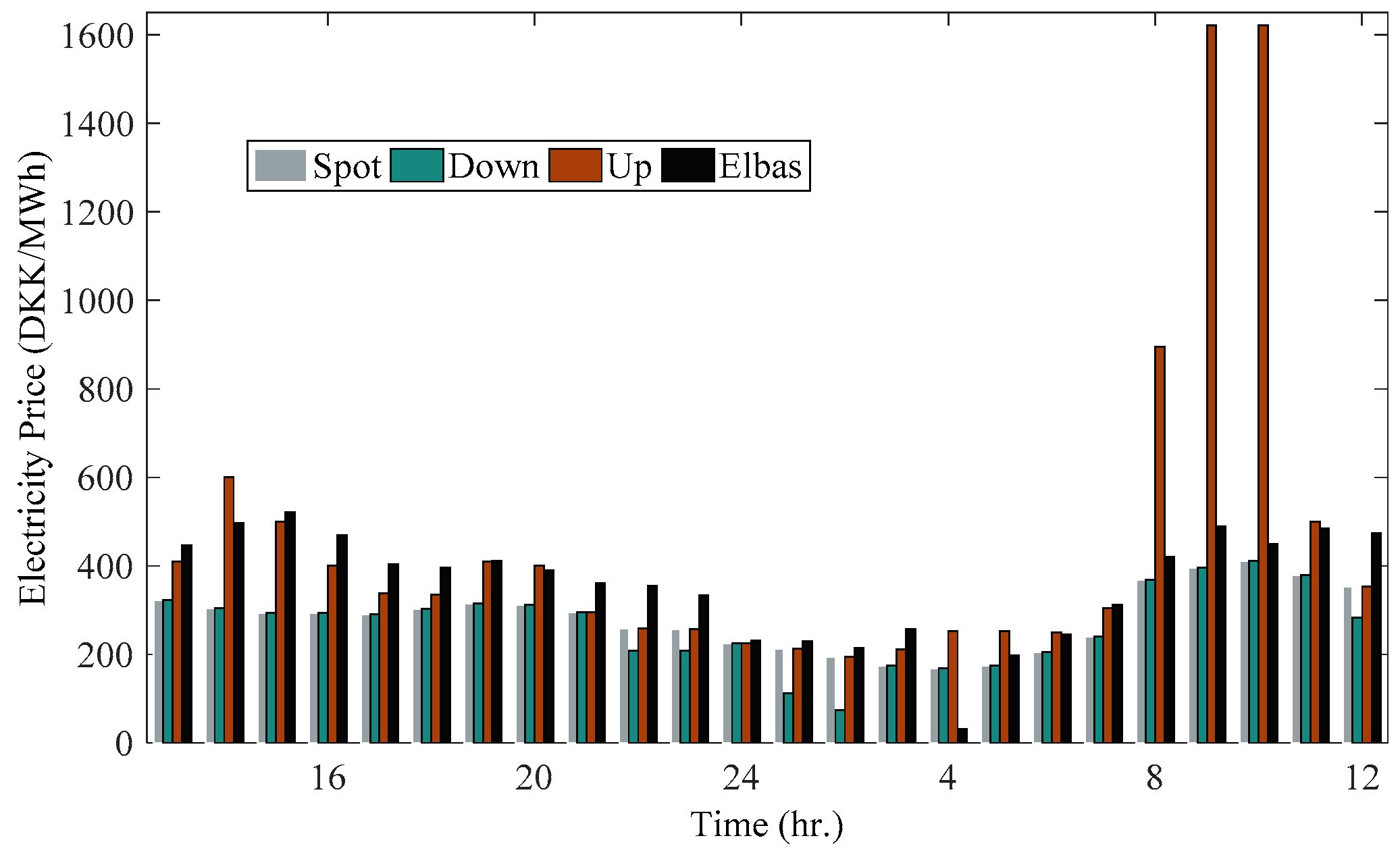
- Hourly electricity prices for the next day are taken from spot market.
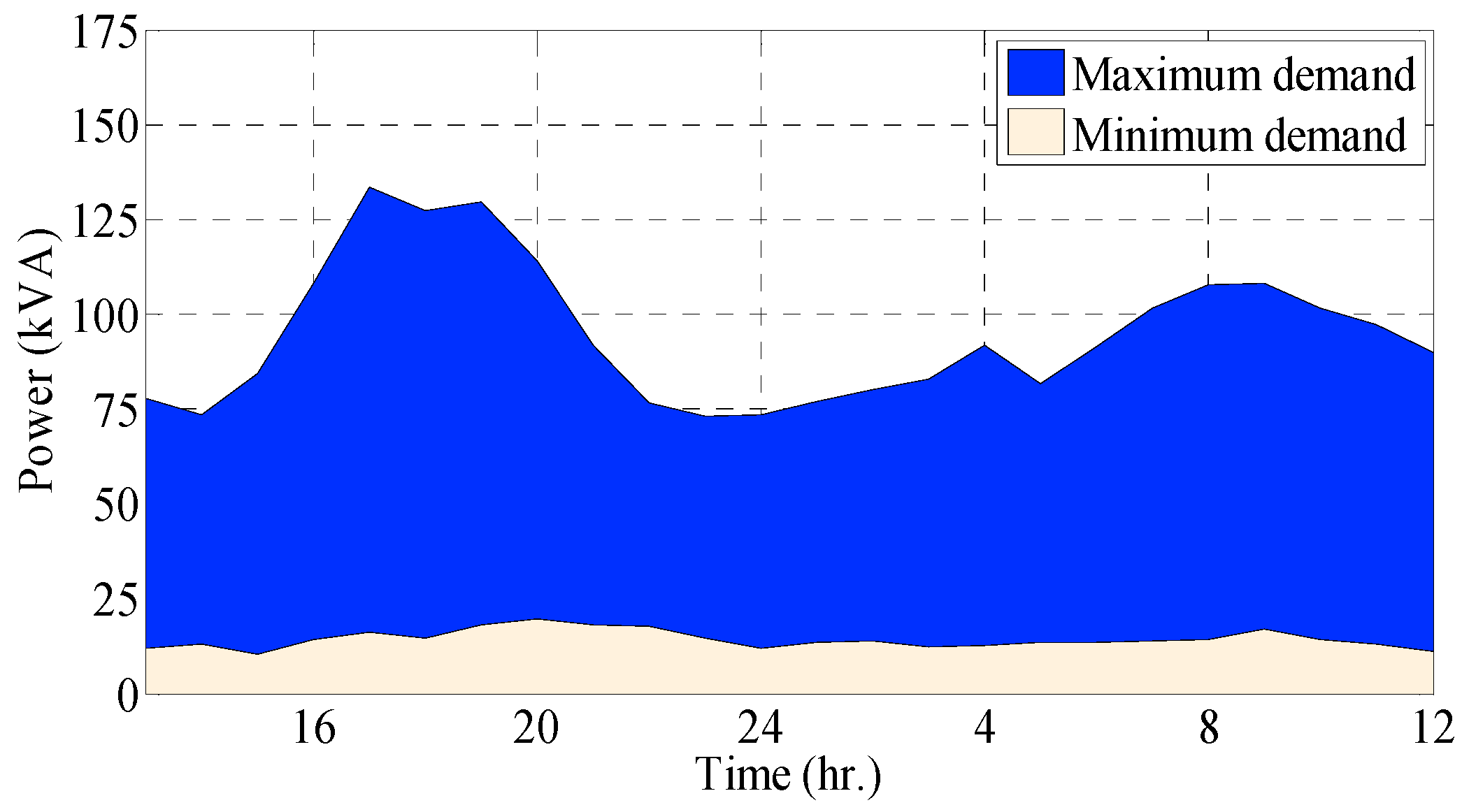
- DSO provides forecasted load for every 15 min for the next 24 h.
- EV availability at different time slots is generated based on distribution of arrival and departure of EVs and percentage availability of the EVs over the day.
- The SL minimizes the charging cost based on the coordinative goal (Section 4.4) to determine total power allocated for EV charging at each time slot. The solution thus consists of optimized aggregated schedule for all slots for next 24 h.
5.2. Coordinative Layer
- All EVs send their SOC, Tin, Tout, and Pmax to the aggregator after plugged-in. Therefore, those matrices for each plugged-in EV are known to CL.
- Any unusual travel requirements, including emergency charging, are assumed to be provided by the customers during plug-in period.
- Upon receipt of those matrices from all connected EVs, the aggregator performs optimization considering network constraints and individual EV requirements to compute optimum operational schedules of each EV. Those schedules are then dispatched to each EV.
- At the end of each slot, all plugged-in EVs send their updated measurement matrices and the optimization is performed again considering the newly added EVs and observed deviations in charging/discharging profiles of the EVs. The process is repeated periodically at each time slot (every 15 min in this paper).
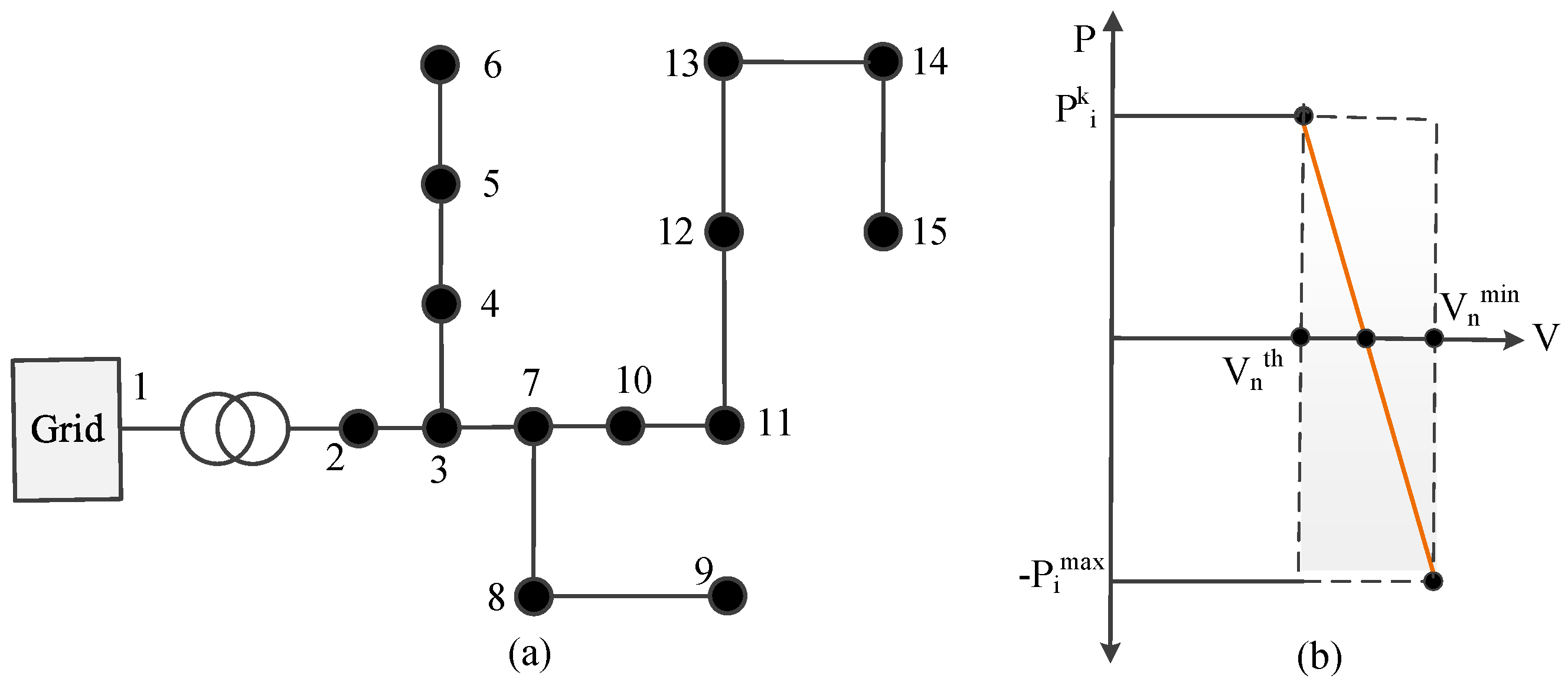
5.3. Adaptive Layer
6. Results and Discussion
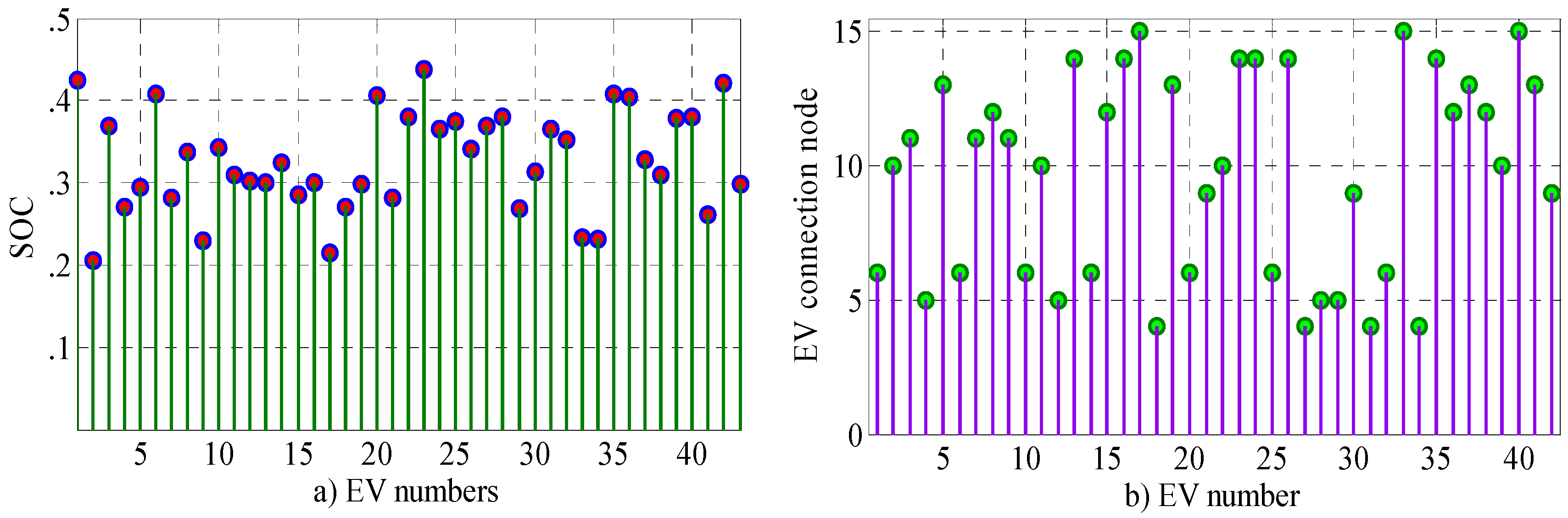
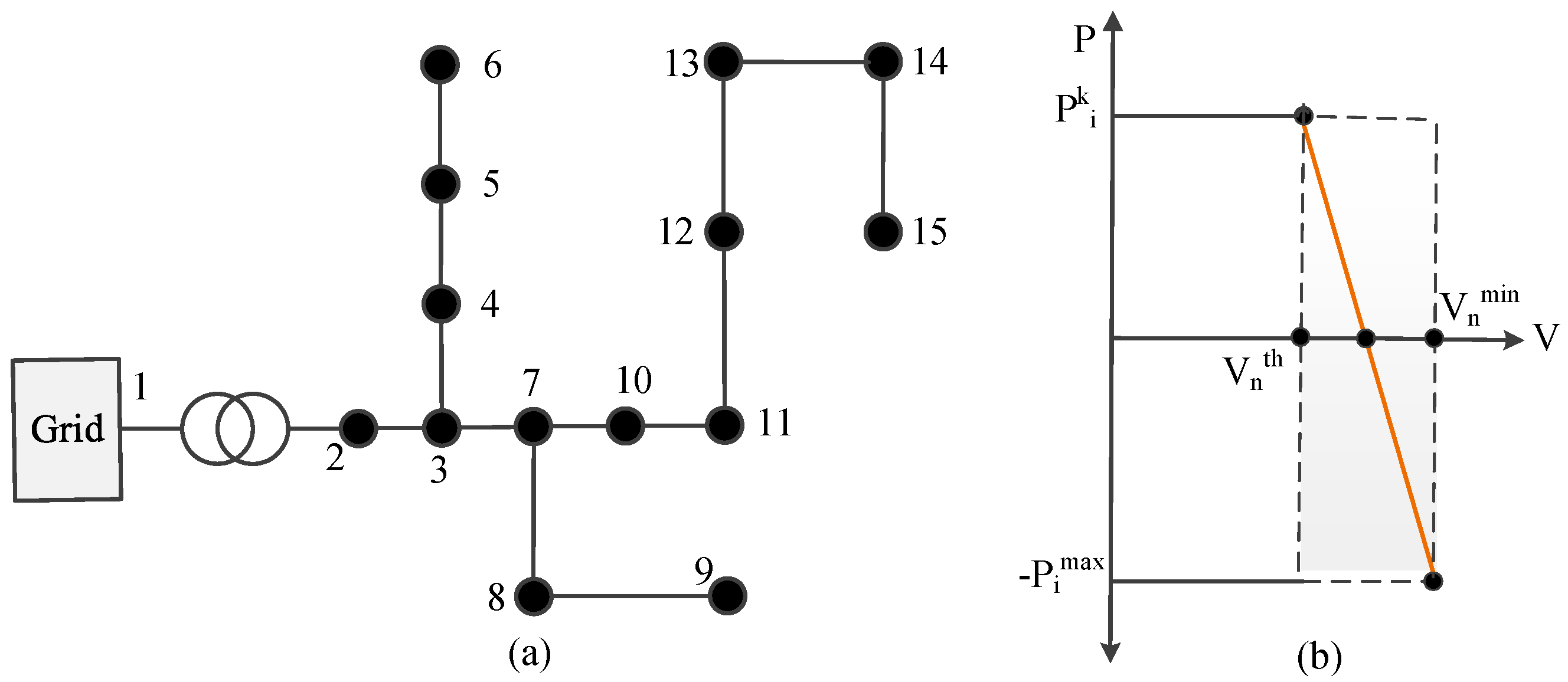
6.1. Configuration of Simulation Parameters
6.2. Simulation Results and Analysis
6.2.1. Consumer Perspective
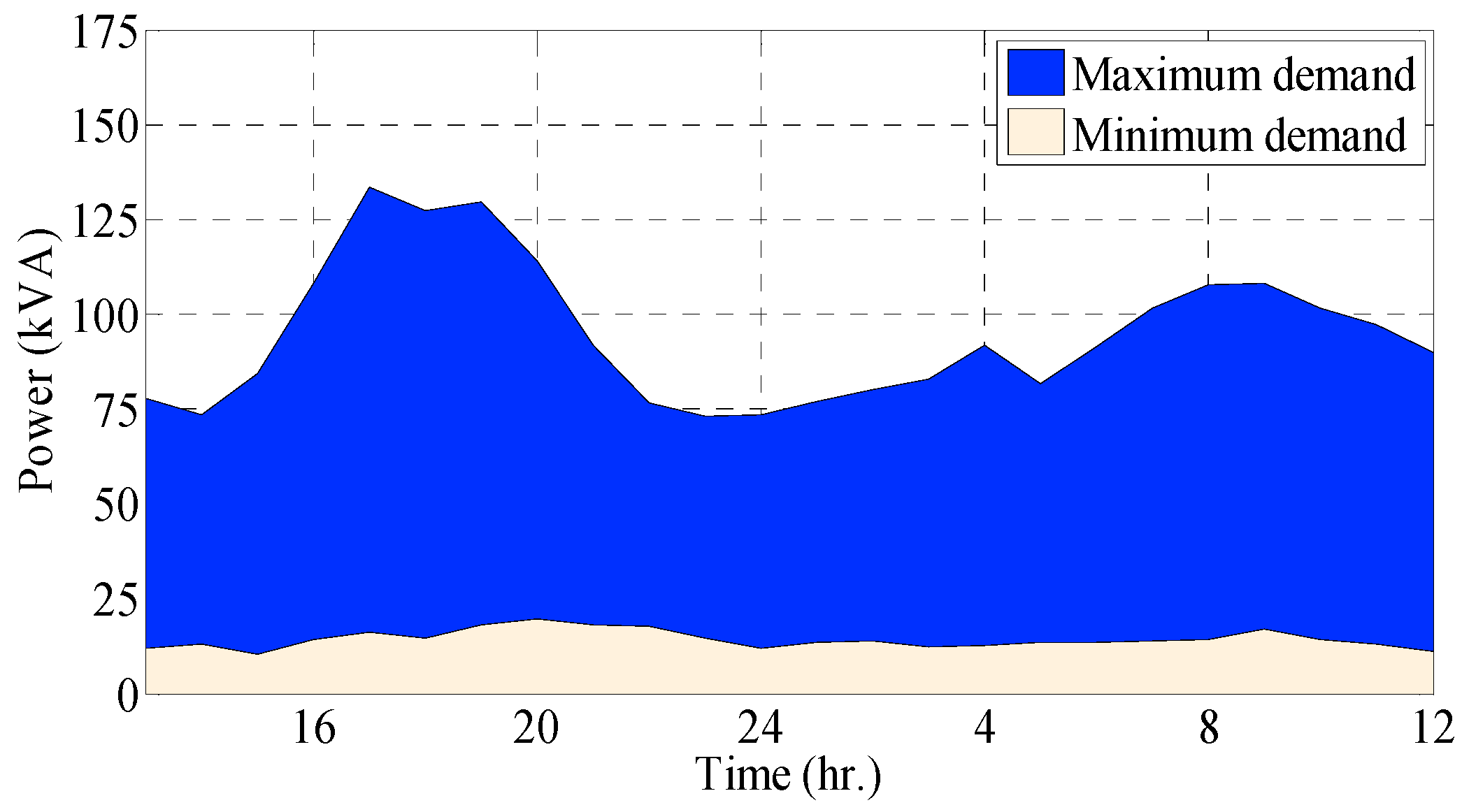
6.2.2. Distribution System Operator Perspective
6.2.3. Aggregator Perspective
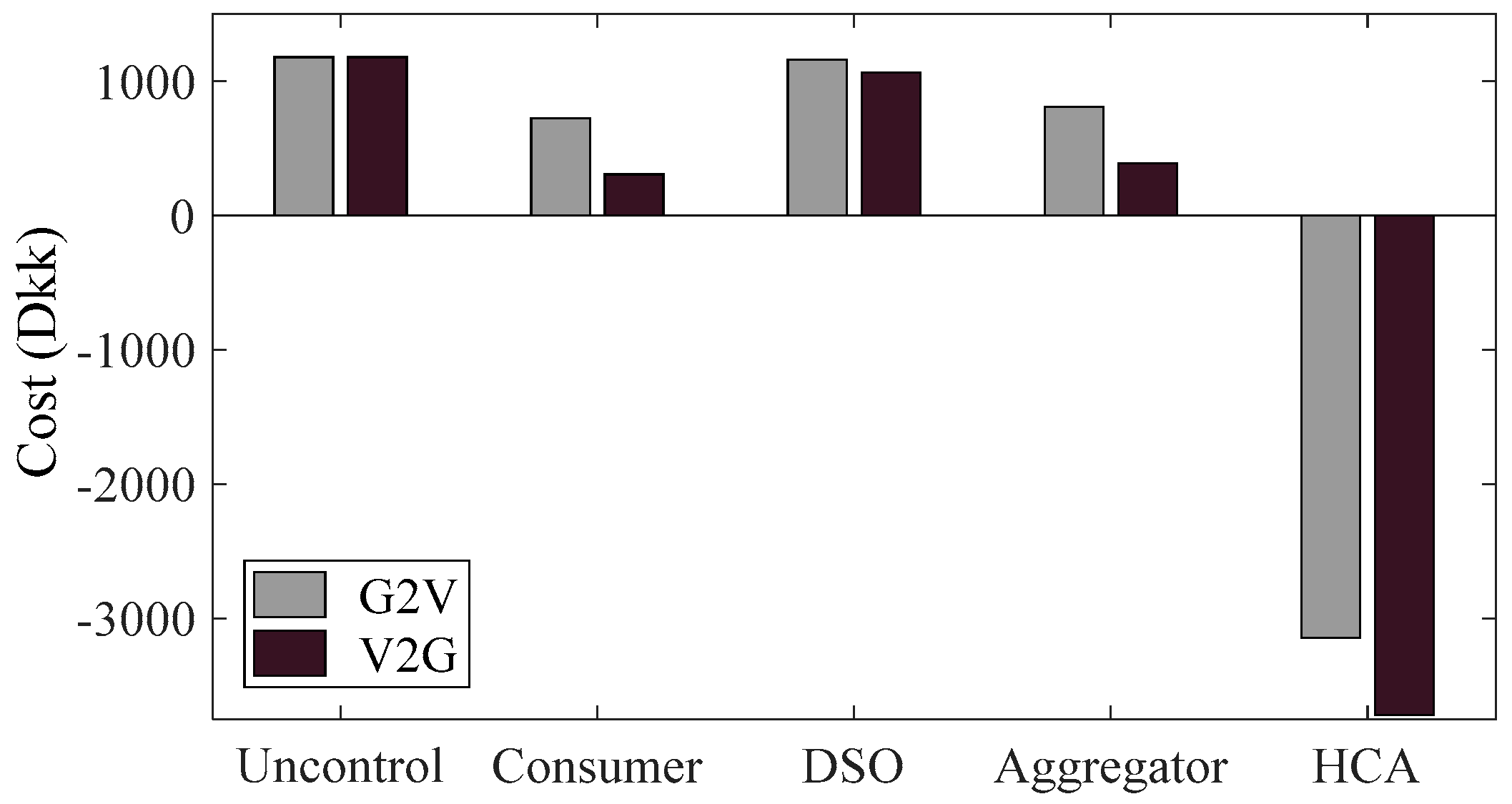
6.2.4. Hierarchical Coordinated Charging
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- The U.S. Department of Energy. Smart Grid System Report; The U.S. Department of Energy: Washington, DC, USA, 2014.
- Danish Ministry of Climate. Energy and Building, Energy Policy Report; Danish Ministry of Climate: Copenhagen, Denmark, 2013. [Google Scholar]
- Bhattarai, B.P.; Bak-Jensen, B.; Mahat, P.; Pillai, J.R.; Maier, M. Hierarchical control architecture for demand response in smart grid scenario. In Proceedings of the 5th IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC 2013), Hong Kong, China, 8–11 December 2013; pp. 1–6.
- Danish Energy Association. Smart Grid in Denmark 2.0; Energinet.dk: Erritsø, Denmark, 2013. [Google Scholar]
- Bhattarai, B.P.; Lévesque, M.; Maier, M.; Bak-Jensen, B.; Pillai, J.R. Optimizing electric vehicle coordination over a heterogeneous mesh network in a scaled-down smart grid testbed. IEEE Trans. Smart Grid 2015, 6, 784–794. [Google Scholar] [CrossRef]
- Han, S.; Han, S. Economic feasibility of V2G frequency regulation in consideration of battery wear. Energies 2013, 6, 748–765. [Google Scholar] [CrossRef]
- Masuta, T.; Yokoyama, A. Supplementary load frequency control by use of a number of both electric vehicles and heat pump water heaters. IEEE Trans. Smart Grid 2012, 3, 1253–1262. [Google Scholar] [CrossRef]
- Zhou, L.; Li, Y.; Wang, B.; Wang, Z.; Hu, X. Provision of supplementary load frequency control via aggregation of air conditioning loads. Energies 2015, 8, 14098–14117. [Google Scholar] [CrossRef]
- Gelazanskas, L.; Gamage, K.A.A. Distributed energy storage using residential hot water heaters. Energies 2016, 9, 127. [Google Scholar] [CrossRef] [Green Version]
- Pillai, J.R.; Bak-Jensen, B. Integration of vehicle-to-grid in western Danish power system. IEEE Trans. Sustain. Energy 2011, 2, 12–19. [Google Scholar] [CrossRef]
- Hu, W.; Su, C.; Chen, Z.; Bak-Jensen, B. Optimal operation of plug-in electric vehicles in power systems with high wind power penetrations. IEEE Trans. Sustain. Energy 2013, 4, 577–585. [Google Scholar]
- Liu, Z.; Wu, Q.; Hielsen, A.H.; Wang, Y. Day-ahead energy planning with 100% electric vehicle penetration in the Nordic region by 2050. Energies 2014, 7, 1733–1749. [Google Scholar] [CrossRef] [Green Version]
- Pakka, V.H.; Rylatt, M. Design and analysis of electrical distribution networks and balancing markets in the UK: A new framework with applications. Energies 2016, 9, 101. [Google Scholar] [CrossRef] [Green Version]
- Wen, C.; Chen, J.; Teng, J.; Ting, P. Decentralized plug-in electric vehicle charging selection algorithm in power systems. IEEE Trans. Smart Grid 2012, 3, 1779–1789. [Google Scholar] [CrossRef]
- Rasheed, M.B.; Javaid, N.; Ahmad, A.; Jamil, M.; Khan, Z.A.; Qasim, U.; Alrajeh, N. Energy optimization in smart homes using customer preference and dynamic pricing. Energies 2016, 9, 583. [Google Scholar] [CrossRef]
- Rasheed, M.B.; Javaid, N.; Awais, M.; Khan, Z.A.; Qasim, U.; Alrajeh, N.; Iqbal, Z.; Javaid, Q. Real time information based energy management using customer preference and dynamic pricing in smart homes. Energies 2016, 9, 542. [Google Scholar] [CrossRef]
- Olivella-Rosell, P.; Villafafila, R.R.; Sumper, A.; Bergas-Jane, J. Probabilistic agent-based model of electric vehicle charging demand to analysis the impact on distribution networks. Energies 2015, 8, 4160–4187. [Google Scholar] [CrossRef] [Green Version]
- Bhattarai, B.P.; Bak-Jensen, B.; Mahat, P.; Pillai, J.R. Voltage controlled dynamic demand response. In Proceedings of the 2013 4th IEEE/PES Innovative Smart Grid Technologies Europe (ISGT EUROPE), Copenhagen, Denmark, 6–9 October 2013.
- Leemput, N.; Geth, F.; Roy, J.V.; Olivella-Rosell, P.; Driesen, J.; Sumper, A. MV and LV residential grid impact of combined slow and fast charging of electric vehicles. Energies 2015, 8, 1760–1783. [Google Scholar] [CrossRef] [Green Version]
- Sundstrom, O.; Binding, C. Flexible charging optimization for electric vehicles considering distribution grid constraints. IEEE Trans. Smart Grid 2013, 3, 26–37. [Google Scholar] [CrossRef]
- Alonso, M.; Amaris, H.; Germain, J.G.; Galan, J.M. Optimal charging scheduling of electric vehicles in smart grids by heuristic algorithms. Energies 2014, 7, 2449–2475. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef]
- Gerards, M.E.T.; Hurink, J.L. Robust peak-shaving for a neighborhood with electric vehicles. Energies 2016, 9, 594. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Richardson, P.; Flynn, D.; Keane, A. Local versus centralized charging strategies for electric vehicles in low voltage distribution systems. IEEE Trans. Smart Grid 2012, 3, 1020–1028. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; Bak-Jensen, B.; Pillai, J.R.; Mahat, P. Two-stage electric vehicle charging coordination in low voltage distribution grids. In Proceedings of the 2014 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Hong Kong, China, 7–10 December 2014; pp. 1–5.
- Fan, Y.; Zhu, W.; Xue, Z.; Zhang, L.; Zou, Z. A multi-function conversion techniques for vehicle to grid applications. Energies 2015, 8, 7638–7653. [Google Scholar] [CrossRef]
- Hu, J.; You, S.; Lind, M.; Østergaard, J. Coordinated charging of electric vehicles for congestion prevention in the distribution grid. IEEE Trans. Smart Grid 2014, 5, 703–711. [Google Scholar] [CrossRef] [Green Version]
- Mingchao, C.; Lai, Q.; Zhong, Y.; Li, C.; Chiang, H. Aggregator-based interactive charging management system for electric vehicle charging. Energies 2014, 9. [Google Scholar] [CrossRef]
- Geng, B.; Mills, J.K.; Sun, D. Two-stage charging strategy for plug-In electric vehicles at the residential transformer level. IEEE Trans. Smart Grid 2013, 4, 1442–1452. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; Bak-Jensen, B.; Pillai, J.R.; Maier, M. Demand flexibility from residential heat pump. In Proceedings of the 2014 IEEE PES General Meeting | Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014.
- Yang, J.; Hao, W.; Chen, L.; Chen, J.; Jin, J.; Want, F. Risk assessment of distribution networks considering the charging-discharging behaviors of electric vehicles. Energies 2016, 9, 560. [Google Scholar] [CrossRef]
- Divshali, P.H.; Choi, B.J. Electrical market management considering power system constraints in smart distribution grids. Energies 2016, 9, 405. [Google Scholar] [CrossRef]
- Paudyal, S.; Bharati, G.R. Hierarchical approach for optimal operation of distribution grid and electric vehicles. In Proceedings of the 2015 IEEE PowerTech Eindhoven, Eindhoven, The Netherlands, 29 June–2 July 2015.
- Bhattarai, B.P.; Bak-Jensen, B.; Pillai, J.R.; Gentle, J.; Myers, K. Overvoltage mitigation using coordinated control of demand response and grid-tiled rooftop photovoltaic. In Proceedings of the 2015 IEEE Conference on Technologies for Sustainability (SusTech), Ogden, UT, USA, 30 July–1 August 2015.
- Bharati, G.R.; Paudyal, S. Coordinated control of distribution grid and electric vehicle loads. Electr. Power Syst. Res. 2016, 140, 761–768. [Google Scholar] [CrossRef]
- Galvan, E.; Mandal, P.; Velez-Reyes, M.; Kamalasadan, S. Transitive control mechanism for efficient management of EVs charging in transitive energy environment. In Proceedings of the 2016 North American Power Symposium (NAPS), Denver, CO, USA, 18–20 September 2016.
- Mendaza, I.D.C.; Pigazo, A.; Bak-Jensen, B.; Chen, Z. Generation of domestic hot water space heating and driving pattern profiles for integration analysis of active loads in low voltage grids. In Proceedings of the 4th IEEE/PES Innovative Smart Grid Technologies Europe (ISGT EUROPE), Copenhagen, Denmark, 6–9 October 2013.
- Bhattarai, B.P.; Levesque, M.; Bak-Jensen, B.; Pillai, J.; Maier, M.; Tipper, D.; Myers, K. Design and co-simulation of hierarchical architecture for demand response control and coordination. IEEE Trans. Ind. Inform. 2016. [Google Scholar] [CrossRef]
- Bhattarai, B.P.; De Zerio Mendaza, I.D.; Bak-Jensen, B.; Pillai, J.R.; Karki, N.R.; Gentle, J.P.; Myers, K.S. Active control of thermostatic loads for economic and technical support to distribution grids. In Proceedings of the 2016 Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016.
- Bhattarai, B.P.; Mendaza, I.D.M.; Bak-Jensen, B.; Pillai, J.R. Local adaptive control of solar photovoltaic and electric water heaters for real-time grid support. In Proceedings of the 2016 CIGRE Paris Session, Paris, France, 21–26 August 2016.







© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhattarai, B.P.; Myers, K.S.; Bak-Jensen, B.; Paudyal, S. Multi-Time Scale Control of Demand Flexibility in Smart Distribution Networks. Energies 2017, 10, 37. https://doi.org/10.3390/en10010037
Bhattarai BP, Myers KS, Bak-Jensen B, Paudyal S. Multi-Time Scale Control of Demand Flexibility in Smart Distribution Networks. Energies. 2017; 10(1):37. https://doi.org/10.3390/en10010037
Chicago/Turabian StyleBhattarai, Bishnu P., Kurt S. Myers, Birgitte Bak-Jensen, and Sumit Paudyal. 2017. "Multi-Time Scale Control of Demand Flexibility in Smart Distribution Networks" Energies 10, no. 1: 37. https://doi.org/10.3390/en10010037