Spatio-Temporal Human Grip Force Analysis via Sensor Arrays

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
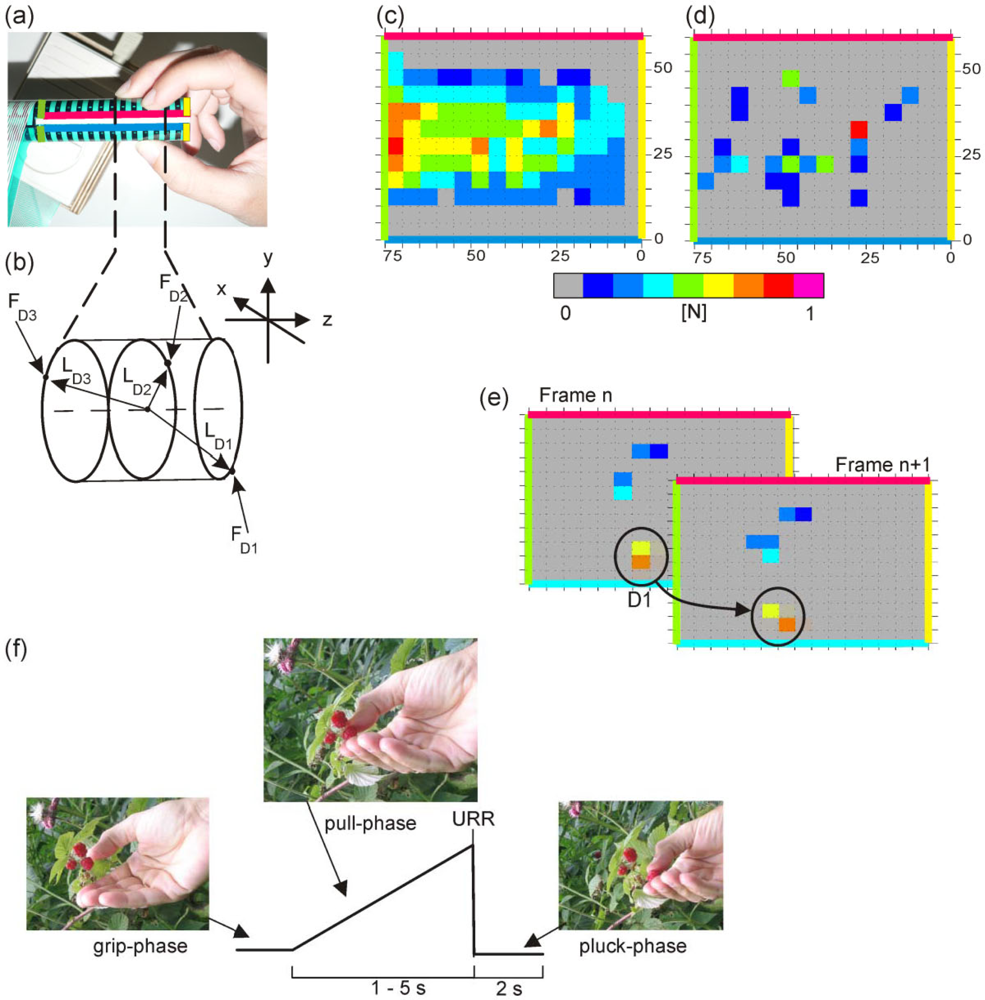
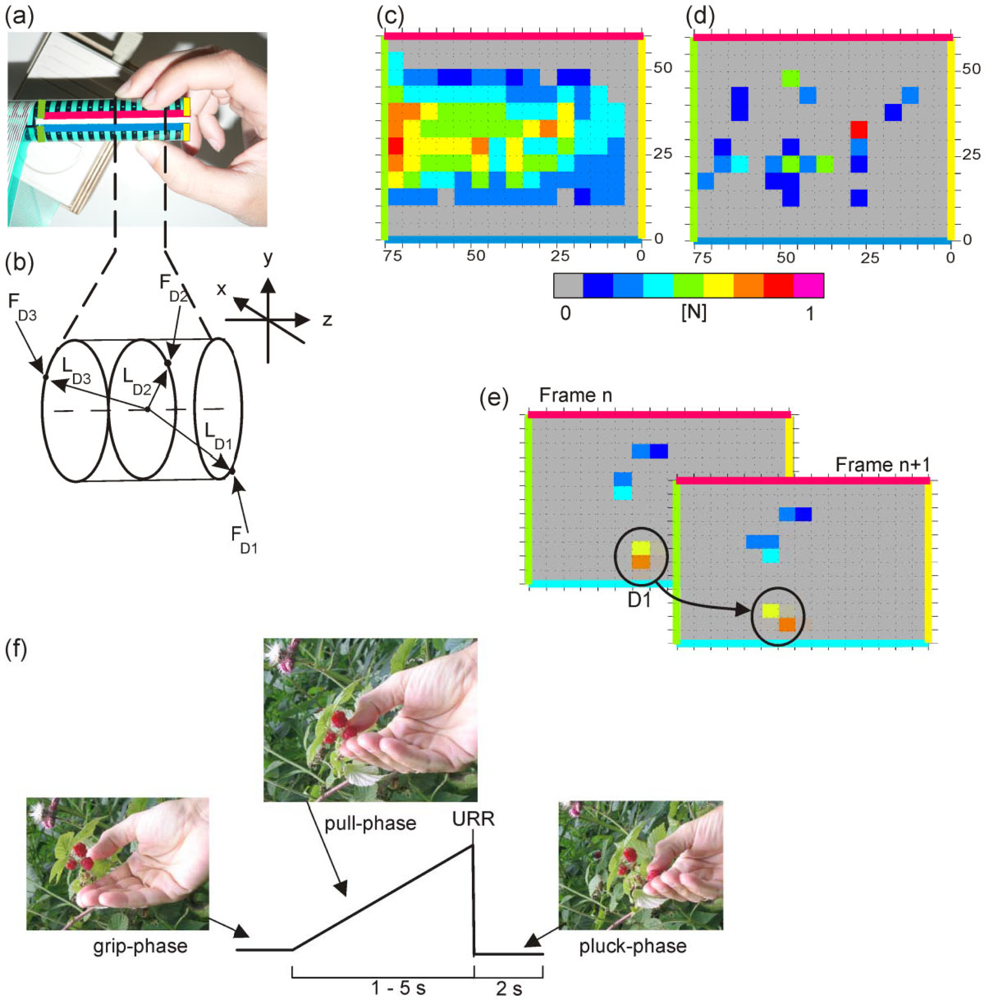
2.1. Grip Rod and Force-Measuring Film
2.2. Detection of Grip Forces and Correlation of Finger Positions with Forces Significantly Detected
- N(μ,σ) → N(0,1)Ri (pj) = residual of pixel pj in frame Fi; Fi (pj) is the raw value of pixel pj; = mean noise at pixel pj, measured separately across at least 300 frames of the noise film (see Figure 1d). n Ri (pj) = normalised residual of pixel pj, in frame Fi. S. D. (Ri) = standard deviation of the residual of frame Fi. 95% c.v. = 95% upper confidence value of the system noise level measured in the noise film.
- Smoothing each frame:Each frame is smoothed with a Gaussian kernel K(pj,pk) to improve the signal to noise ratio. The values zj of the smoothed normalised residual frame represent local statistics that have the purpose of detecting sub regions of local spatial association. The parameter σ (in pixel) is chosen to match the scale at which spatial association exists (Equations 3 and 4 from [21]).with nRi(pj) = normalised residual of pixel pj in Frame Fi and K(pj,pk) as:where d(pj,pk) = distance between pixel pj and pk.
- Significant pixel detection. The third step was to detect the significance of force as a pixel in a frame, whereby the number of tests depended on the total number of pixels and the value of σ2 of the Gaussian kernel (Equation 2). The larger the value of σ2, the greater was the spatial correlation between local tests. Rogerson provided an approximation (Equation 3) that allowed direct calculation of the observed maximum local statistics [21,22]:by using α = 0.05, σ = 0.5, A = 12 × 15 pixel = 180 resulted in M* = 3.425. Any value zj in the smoothed normalised residual frame exceeding M* is significant at the 5%-level of first error.
2.3. Pairwise Correlation of Single-Finger Forces between Frames
- By using the “Flood-fill-algorithm”, recognised coherent areas were marked (see http://en.wikipedia.org/wiki/Flood_fill). In this way significant pixels situated horizontally or vertically adjacent were combined (e.g., circle in Frame n of Figure 1e). The weighted centre of force was calculated for each marked area.
- Centres of areas lying inside a given distance (intraframe distance: 1.645 pixel) were considered to be of the same origin and were combined. In this way combined areas contacted at their corners only (e.g., circle in Frame n+1 of Figure 1e).
- Subsequently, the final weighted centres were compared and combined with the centres of the previous frame. The maximum distance between centres of the same finger was here 0.8 pixel (interframe distance). An example is given in Figure 1e. From the position of finger D1 (thumb) in Frame n followed the position of D1 in Frame n + 1.
2.4. Dynamic Torque Analysis
2.5. “Pick the Raspberry” Task
2.6. Simulation of the “Pick the Raspberry” Task
2.7. Subjects and Patients
3. Results and Discussion
3.1. Reliability test of the Force-Measuring Film
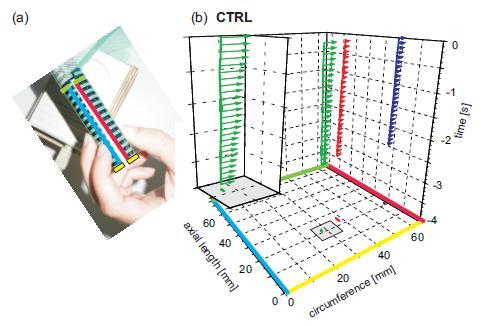
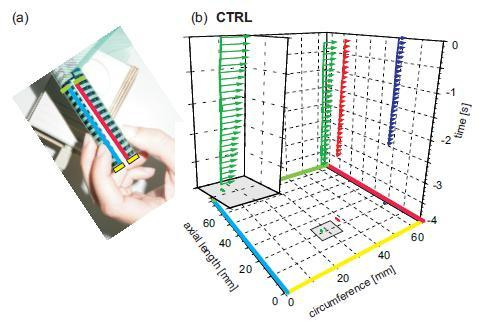
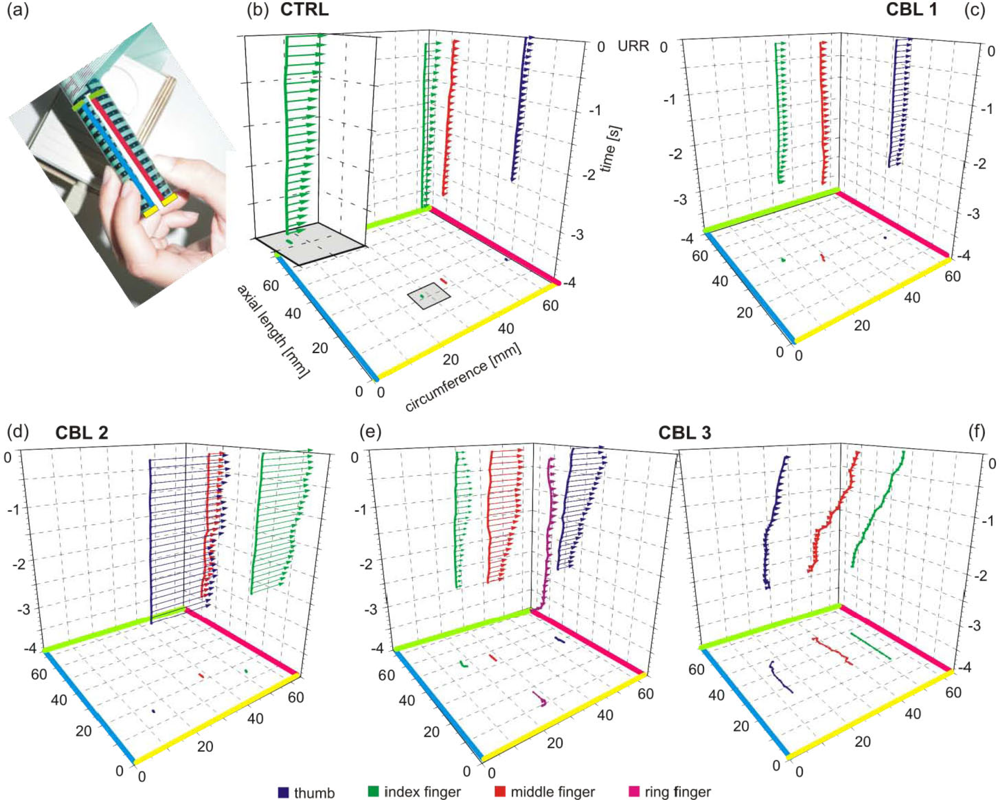
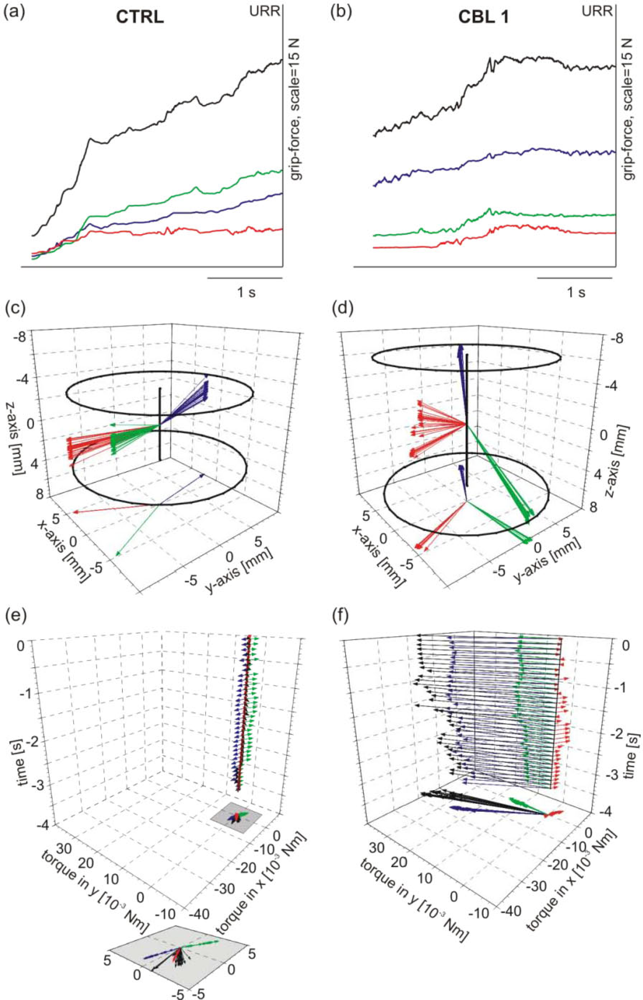
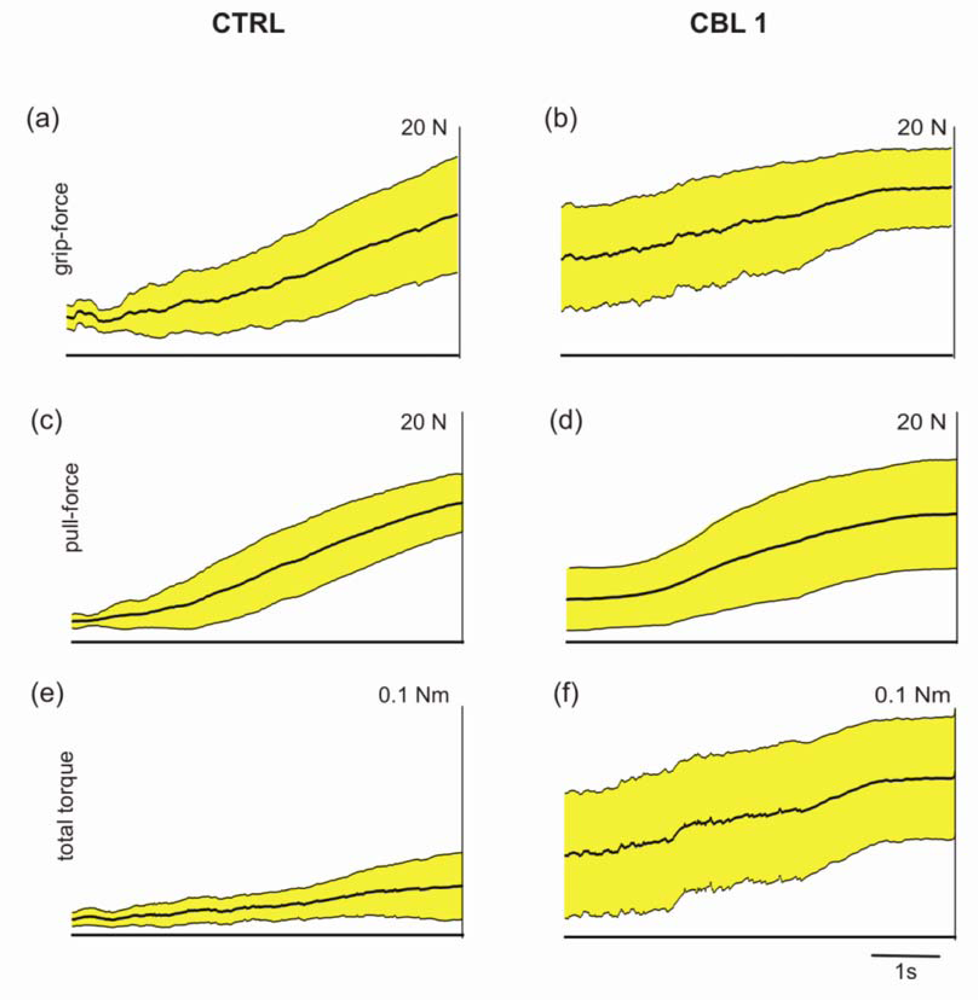
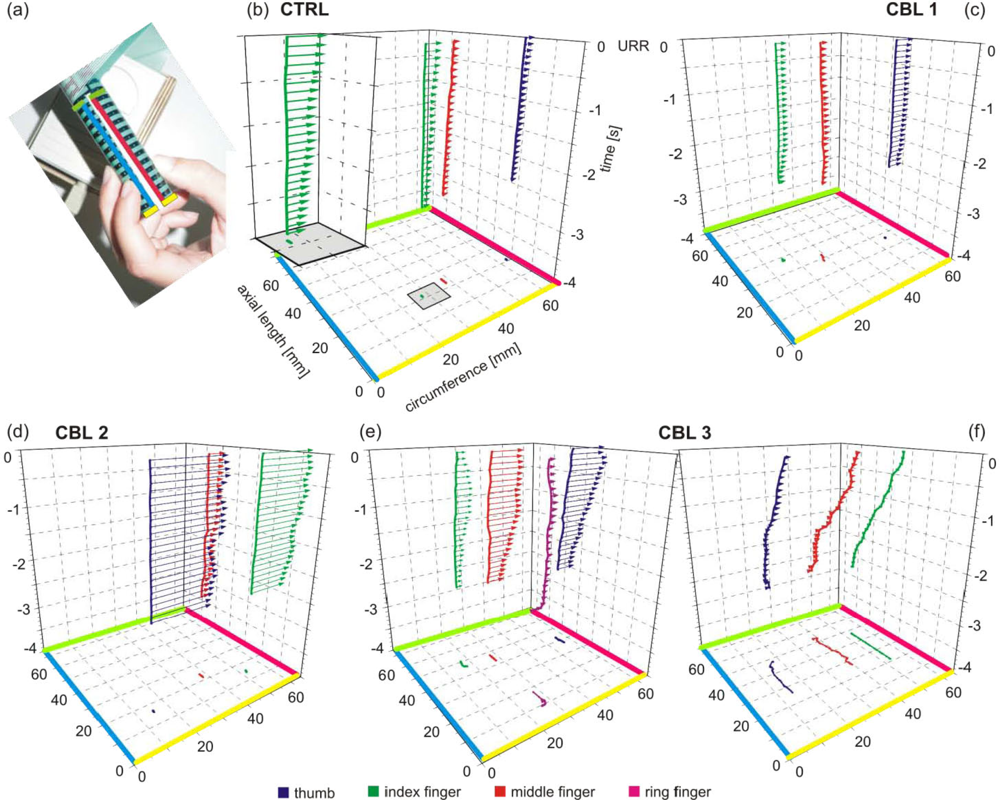
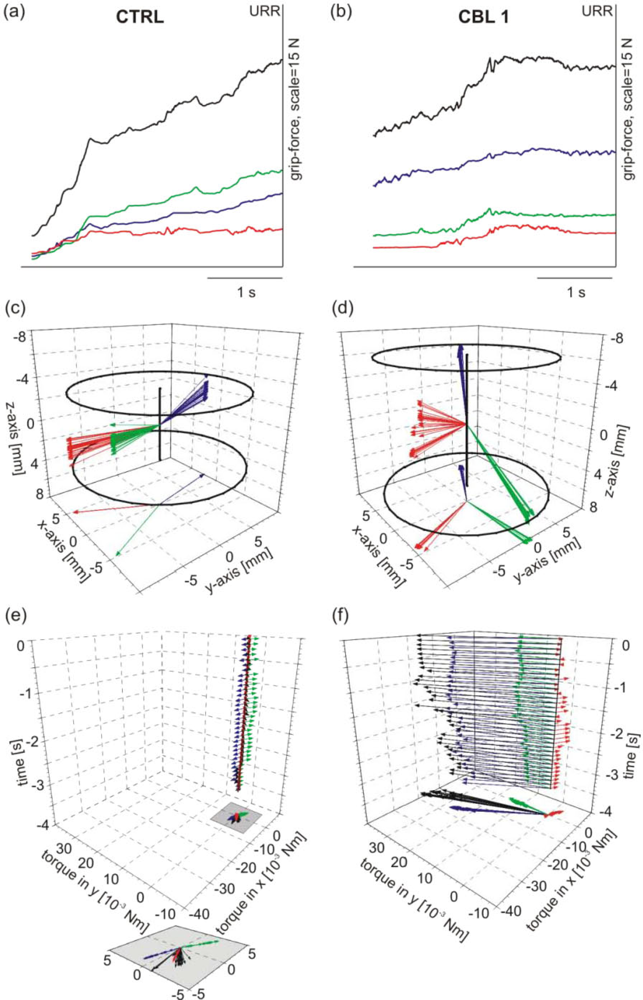
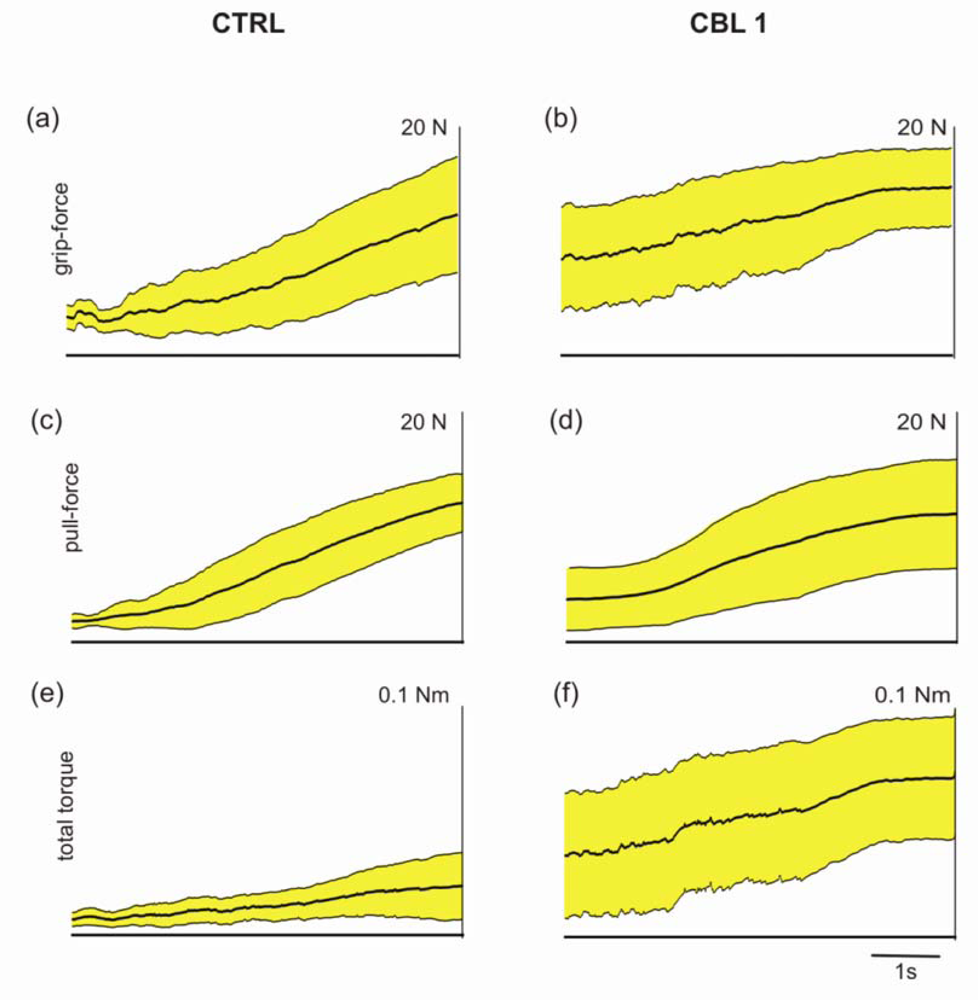
3.2. Spatio-Temporal Profiles of Individual Finger Grip Force Development
3.3 Dynamic Development of Torque
4. Conclusions
Acknowledgments
References and Notes
- Flanagan, J.R.; Johansson, R.S. Hand movements. In Encyclopedia of the Human Brain; Ramachandran, V.S., Ed.; Academic Press: San Diego, CA, USA, 2002. [Google Scholar]
- Johansson, R.S. Sensory control of dexterous manipulation in humans. In Hand and Brain; Wing, A.M., Haggard, P., Flanagan, J.R., Eds.; Academic Press: San Diego, CA, USA, 1996; pp. 381–414. [Google Scholar]
- Johansson, R.S.; Flanagan, J.R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci 2009, 10, 345–359. [Google Scholar]
- Nowak, D.A.; Hermsdorfer, J. Grip force behavior during object manipulation in neurological disorders: toward an objective evaluation of manual performance deficits. Mov. Disord 2005, 20, 11–25. [Google Scholar]
- Nowak, D.A.; Hermsdorfer, J. Objective evaluation of manual performance deficits in neurological movement disorders. Brain Res. Rev 2006, 51, 108–124. [Google Scholar]
- Baud-Bovy, G.; Soechting, J.F. Two virtual fingers in the control of the tripod grasp. J. Neurophysiol 2001, 86, 604–615. [Google Scholar]
- Burstedt, M. K. O.; Flanagan, J. R.; Johansson, R. S. Control of grasp stability in humans under different frictional conditions during multidigit manipulation. J. Neurophysiol 1999, 82, 2393–2405. [Google Scholar]
- Chau, T.; Ji, J.; Tam, C.; Schwellnus, H. A novel instrument for quantifying grip activity during handwriting. Arch. Phys. Med. Rehabilit 2006, 87, 1542–1547. [Google Scholar]
- Flanagan, J.R.; Tresilian, J.R. Grip-load force coupling: A general control strategy for transporting objects. J. Exp. Psychol. / Human Percept. Perform 1994, 20, 944–957. [Google Scholar]
- Flanagan, J.R.; Burstedt, M.K.O.; Johansson, R.S. Control of fingertip forces in multidigit manipulation. J. Neurophysiol 1999, 81, 1706–1717. [Google Scholar]
- Kutz, D.F.; Woelfel, A.; Timmann, D.; Kolb, F.P. Detection of changes in grip forces on a sliding object. J. Neurosci. Method 2007, 166, 250–258. [Google Scholar]
- Kutz, D.F.; Wolfel, A.; Timmann, D.; Kolb, F.P. Dynamic torque during a precision grip task comparable to picking a raspberry. J. Neurosci. Method 2009, 177, 80–86. [Google Scholar]
- Pylatiuk, C.; Kargov, A.; Schulz, S.; Döderlein, L. Distribution of grip force in three different functional prehension patterns. J. Med. Eng. Technol 2006, 30, 176–182. [Google Scholar]
- Zatsiorsky, V.M.; Latash, M.L. Prehension synergies. Exercise Sport Sci. R 2004, 32, 75–80. [Google Scholar]
- Zatsiorsky, V.M.; Gao, F.; Latash, M.L. Prehension synergies: effects of object geometry and prescribed torques. Exp. Brain Res 2003, 148, 77–87. [Google Scholar]
- Zatsiorsky, V.M.; Gao, F.; Latash, M.L. Prehension stability: Experiments with expanding and contracting handle. J. Neurophysiol 2006, 95, 2513–2529. [Google Scholar]
- Buchholz, B.; Frederick, L.J.; Armstrong, T.J. An investigation of human palmar skin friction and the effects of materials, pinch force and moisture. Ergonomics 1988, 31, 317–325. [Google Scholar]
- Cadoret, G.F.; Smith, A.M. Friction, not texture, dictates grip forces used during object manipulation. J. Neurophysiol 1996, 75, 1963–1969. [Google Scholar]
- Johansson, R.S.; Westling, G. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp. Brain Res 1984, 56, 550–564. [Google Scholar]
- Nowak, D.A.; Hermsdörfer, J. Digit cooling influences grasp efficiency during manipulative tasks. Eur. J. Appl. Physiol 2003, 89, 127–133. [Google Scholar]
- Rogerson, P.A. Change detection thresholds for remotely sensed images. J. Geogr. Syst 2002, 4, 85–97. [Google Scholar]
- Rogerson, P.A. A statistical method for the detection of geographic clustering. Geogr. Anal 2001, 33, 215–227. [Google Scholar]
- Yorick Interpreter Language; University of California: Berkeley CA, USA, 2001. Available at: http://www.maumae.net/yorick/doc/index.php (accessed 11 August 2009).

© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kutz, D.F.; Wölfel, A.; Meindl, T.; Timmann, D.; Kolb, F.P. Spatio-Temporal Human Grip Force Analysis via Sensor Arrays. Sensors 2009, 9, 6330-6345. https://doi.org/10.3390/s90806330
Kutz DF, Wölfel A, Meindl T, Timmann D, Kolb FP. Spatio-Temporal Human Grip Force Analysis via Sensor Arrays. Sensors. 2009; 9(8):6330-6345. https://doi.org/10.3390/s90806330
Chicago/Turabian StyleKutz, Dieter F., Alexander Wölfel, Tobias Meindl, Dagmar Timmann, and Florian P. Kolb. 2009. "Spatio-Temporal Human Grip Force Analysis via Sensor Arrays" Sensors 9, no. 8: 6330-6345. https://doi.org/10.3390/s90806330