Compact Integration of a GSM-19 Magnetic Sensor with High-Precision Positioning using VRS GNSS Technology

Abstract
:1. Introduction
2. VRS concept
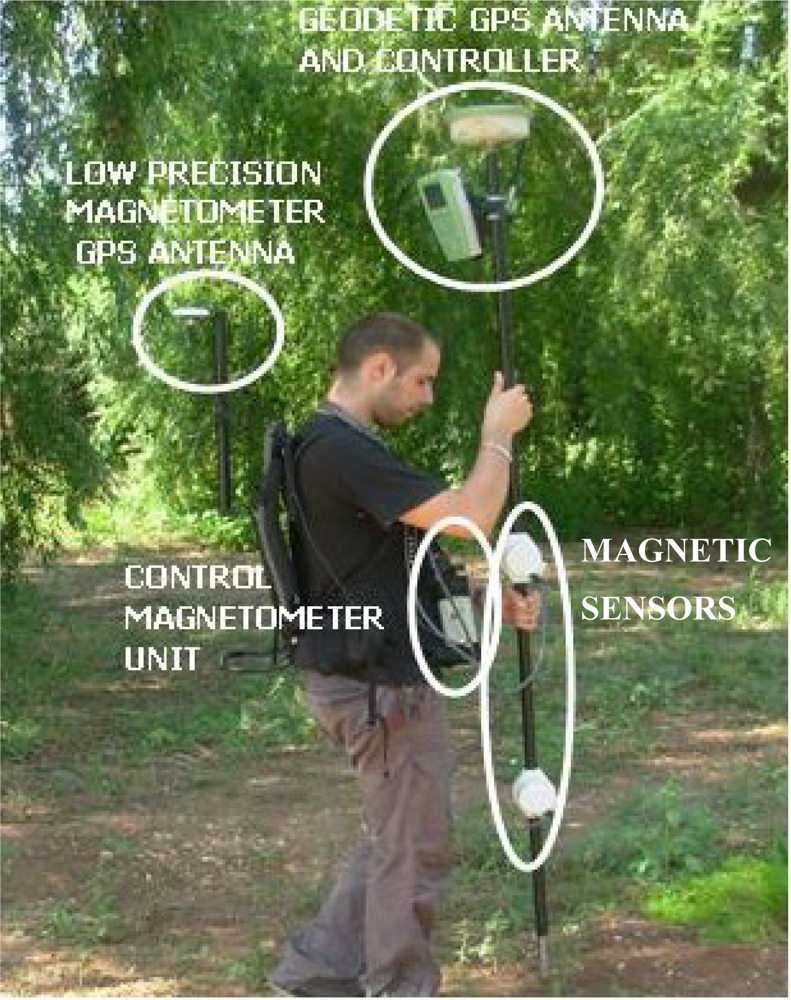
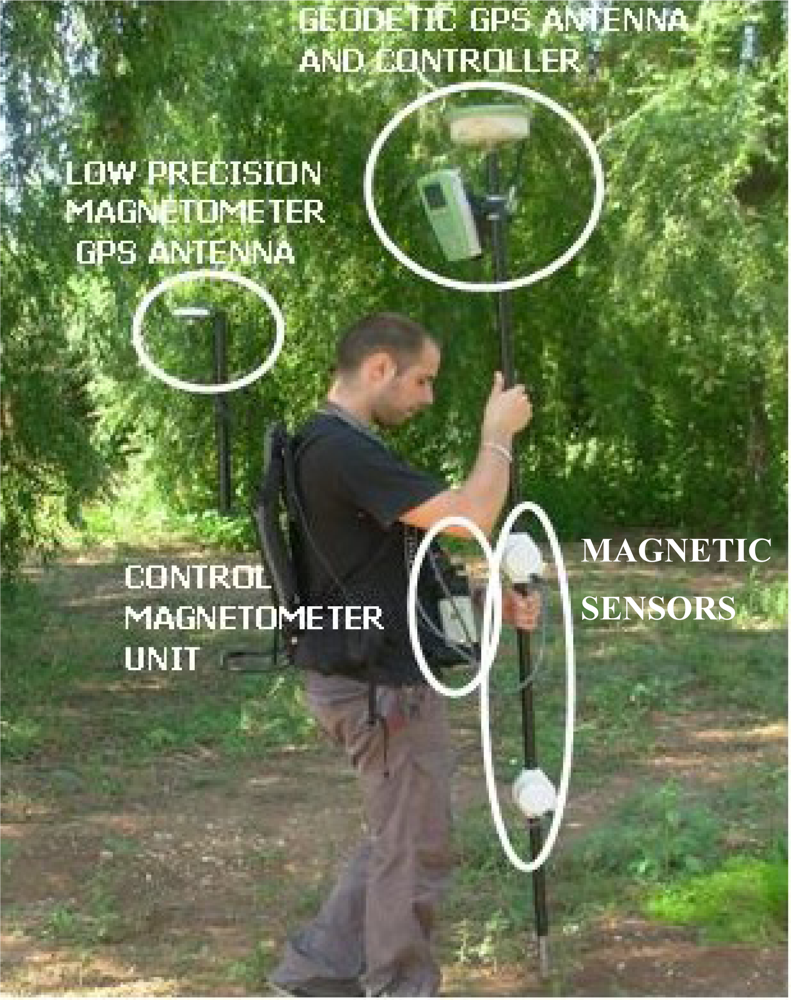
3. Compact magnetometer and GPS integration
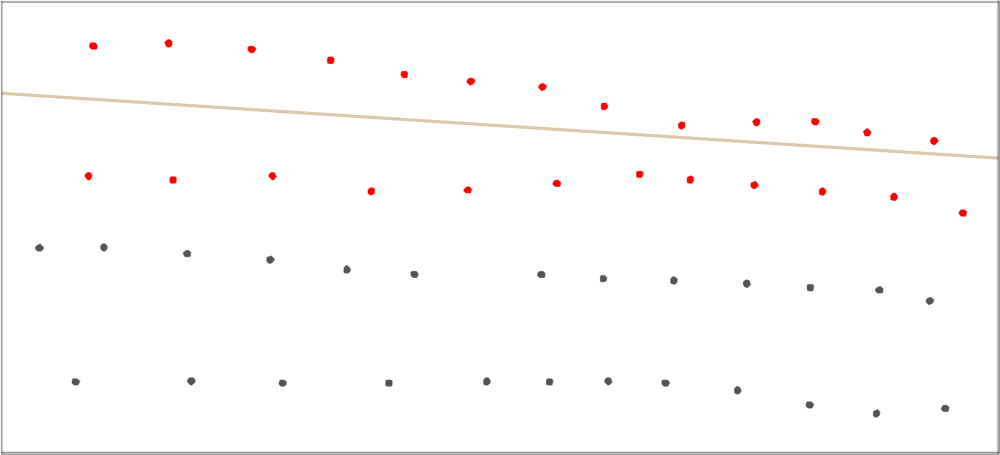
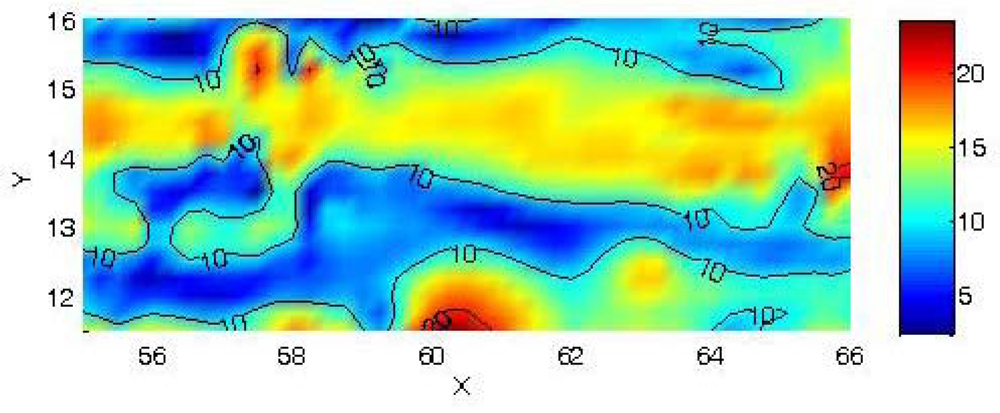
4. Field test
5. Conclusions
Acknowledgments
References
- Aspinall, A.; Gaffney, C.F.; Schmidt, A. Magnetometry for Archaeologists; AltaMira Press: Lanham, U.K., 2008. [Google Scholar]
- Linford, N.; Linford, P.; Martin, L.; Payne, A. Recent results from the English Heritage Caesium Magnetometer system in comparison with recent fluxgate gradiometers. Archaeol. Prospect 2007, 14, 151–166. [Google Scholar]
- Sharma, P.V. Environmental and Engineering Geophysics; Cambridge University Press: Cambridge, U.K., 1997. [Google Scholar]
- Smekalova, T.; Olfer, Y.; Smekalov, S. Magnetic survey in archaeology. 10 years of Archaeology with Overhauser Magnetometers; GEM Systems: Markham, ON, Canada, 2008. [Google Scholar]
- Ueda, H.; Fujita, E.; Ukawa, M.; Yamamoto, E.; Irwan, M.; Kimata, F. Magma intrusion and discharge process at the initial stage of the 2000 activity of Miyakejima, Central Japan, inferred from tilt and GPS data. Geophys. J. Int 2005, 161, 891–906. [Google Scholar]
- Seeber, G. Satellite Geodesy, 2nd Ed. ed; Walter de Gruyter: Berlin, New York, 2003. [Google Scholar]
- Gaffney, C. Detecting trends in the prediction of the buried past: a review of geophysical techniques in archaeology. Archaeometry 2008, 2, 313–336. [Google Scholar]
- Gaffney, C.; Gaffney, V.; Cuttler, R.; Yorston, R. Initial results using GPS navigation with the Foerster magnetometer system at the world heritage site of Cyrene, Libya. Archaeol. Prospect 2008, 15, 151–156. [Google Scholar]
- Landau, H.; Chen, X.; Klose, S.; Leandro, R.; Vollath, U. Trimble’s RTK and DGPS solutions in comparison with Precise Point Positioning. In Observing our changing Earth, International association of Geodesy symposia 133; Sideris, M.G., Ed.; Springer-Verlag: Berlin, Heidelberg, Germany, 2008; pp. 709–718. [Google Scholar]
- Castleden, N.; Hu, G.R.; Abbey, D.A.; Weihing, D.; Øvstedal, O.; Earls, C.J.; Featherstone, W.E. First results from virtual reference station (VRS) and precise point positioning (PPP) GPS research at the western Australian Centre for Geodesy. J. Global Positioning Syst 2004, 2, 79–84. [Google Scholar]
- Hu, G.R.; Khoo, H.S.; Goh, P.C.; Law, C.L. Development and assessment of virtual reference stations for RTK positioning. J. Geodesy 2003, 6, 292–302. [Google Scholar]
- Vollath, U.; Buecherl, A.; Landau, H.; Pagels, C.; Wagner, B. Multi-base RTK positioning using virtual reference stations. Proceedings of ION GPS-2000, Salt Lake City, Utah, USA, September, 2000; pp. 123–131.
- Wanniger, L. Virtual reference stations for centimetre-level kinematic positioning. Proceedings of ION GPS-2002, Portland, Oregon, USA, September, 2002; pp. 1400–1407.
- Fotopoulos, G.; Cannon, M.E. An overview of multireference station methods for cm-level positioning. GPS Solut 2001, 3, 1–10. [Google Scholar]
- Wübbena, G.; Bagge, A.; Seeber, G.; Böder, V.; Hankemeier, P. Reducing distance dependent errors for real-time precise DGPS applications by establishing reference station networks. Proceedings of ION GPS-1996, Kansas City, Missouri, USA, September, 1996; pp. 1845–1852.
- Capilla, R.M.; Die, J.; Esteso, E. Diseño, aplicaciones integradas y rendimiento de la red activa GPS/GNSS de Valencia. 7th International Geomatic Week, Barcelona, Spain, 2007. (in Spanish)..
- Capilla, R.M.; Esteso, E.; Saa, J.M.; Palau, A. The Active Geodetic Network of Valencian Community: E.R.V.A. International congress on geomatic and surveying engineering, Valencia, Spain, 2008. (in Spanish)..



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Absolute error (m) | Kinematic error (m) | |||
|---|---|---|---|---|
| X | Y | X | Y | |
| Mean | 1.110 | 1.467 | −0.528 | −0.317 |
| σ | 1.070 | 1.505 | 0.570 | 0.645 |
© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Martín, A.; Padín, J.; Anquela, A.B.; Sánchez, J.; Belda, S. Compact Integration of a GSM-19 Magnetic Sensor with High-Precision Positioning using VRS GNSS Technology. Sensors 2009, 9, 2944-2950. https://doi.org/10.3390/s90402944
Martín A, Padín J, Anquela AB, Sánchez J, Belda S. Compact Integration of a GSM-19 Magnetic Sensor with High-Precision Positioning using VRS GNSS Technology. Sensors. 2009; 9(4):2944-2950. https://doi.org/10.3390/s90402944
Chicago/Turabian StyleMartín, Angel, Jorge Padín, Ana Belén Anquela, Juán Sánchez, and Santiago Belda. 2009. "Compact Integration of a GSM-19 Magnetic Sensor with High-Precision Positioning using VRS GNSS Technology" Sensors 9, no. 4: 2944-2950. https://doi.org/10.3390/s90402944