Low-cost Sensors Based on the GMI Effect in Recycled Transformer Cores

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
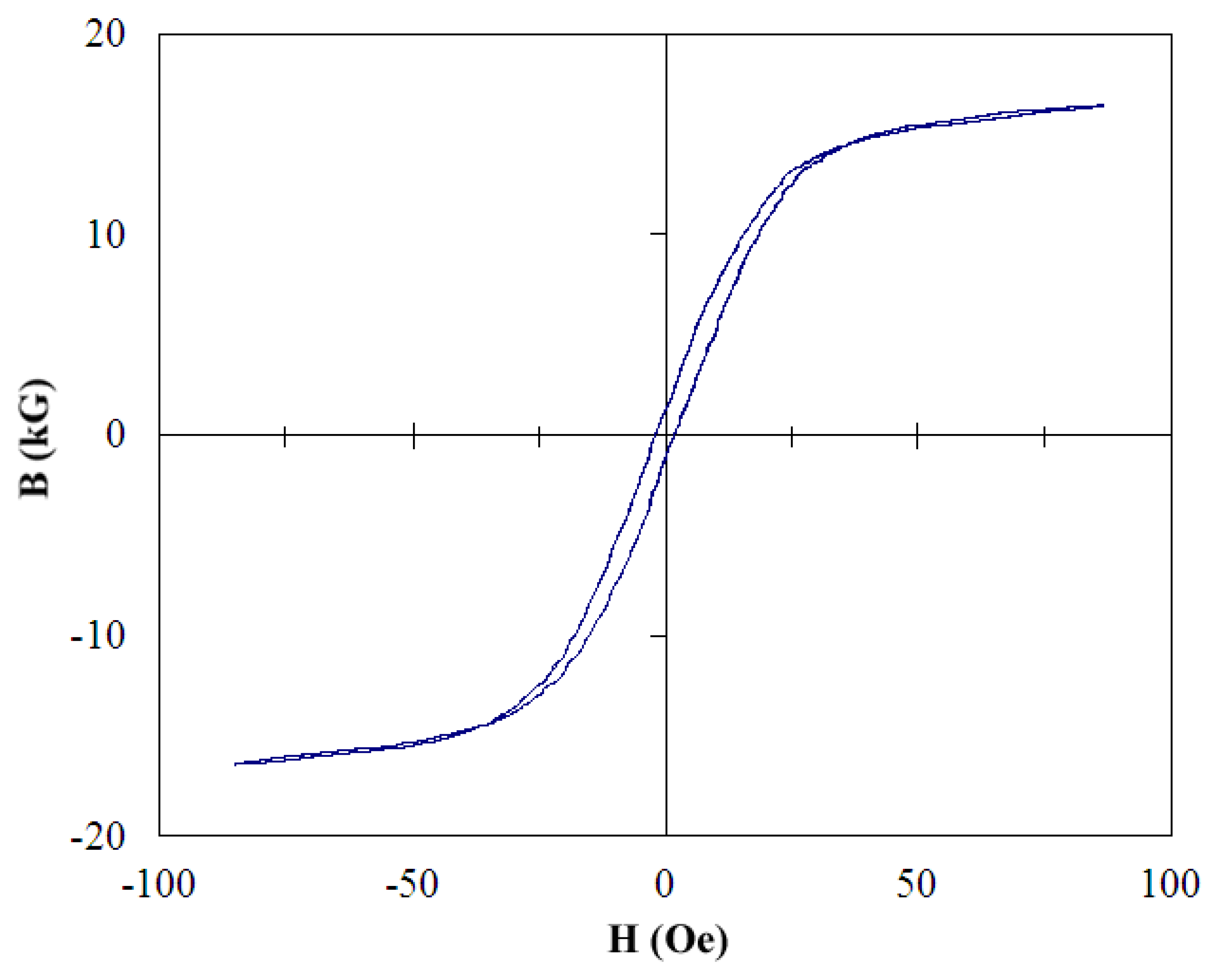
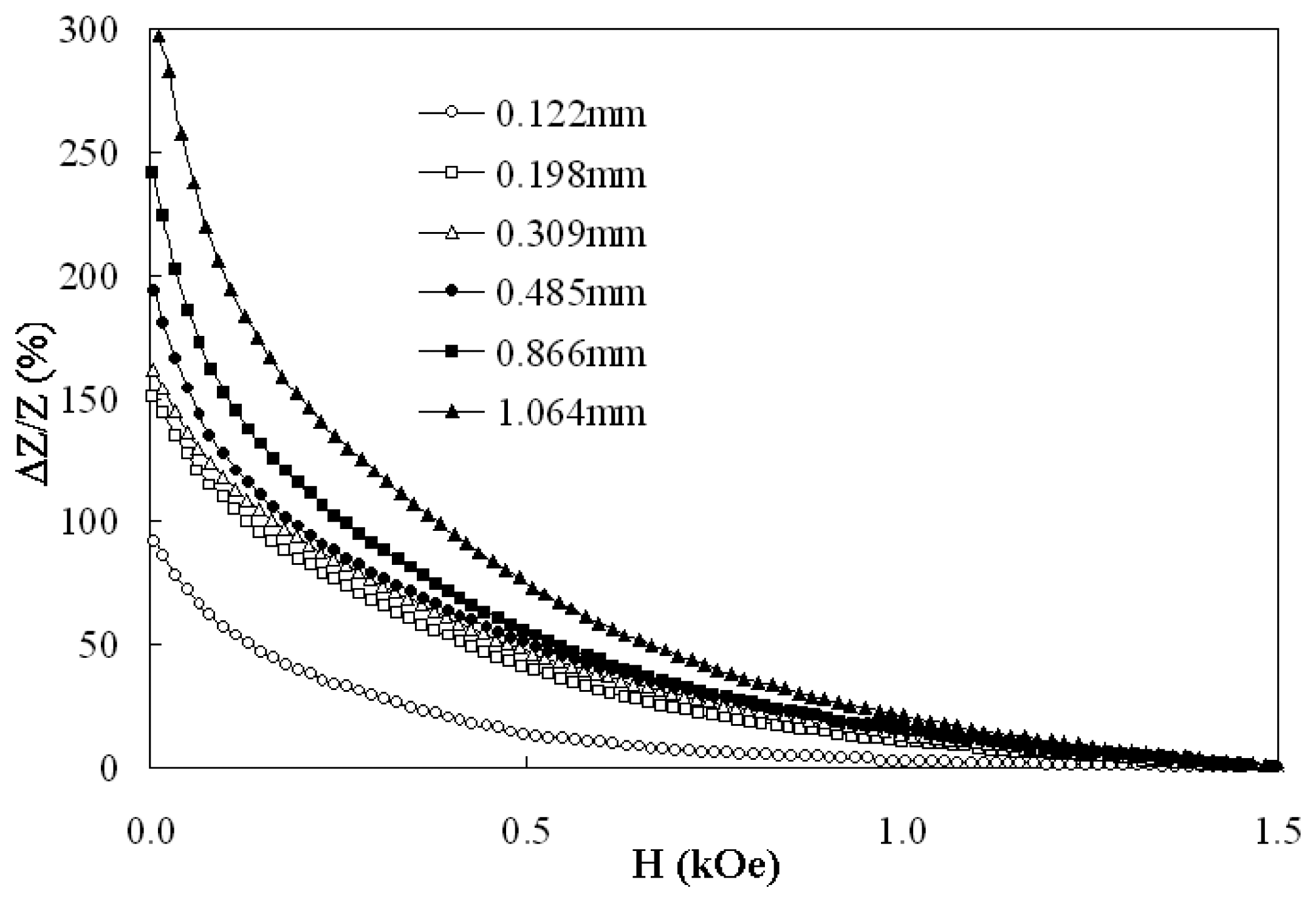
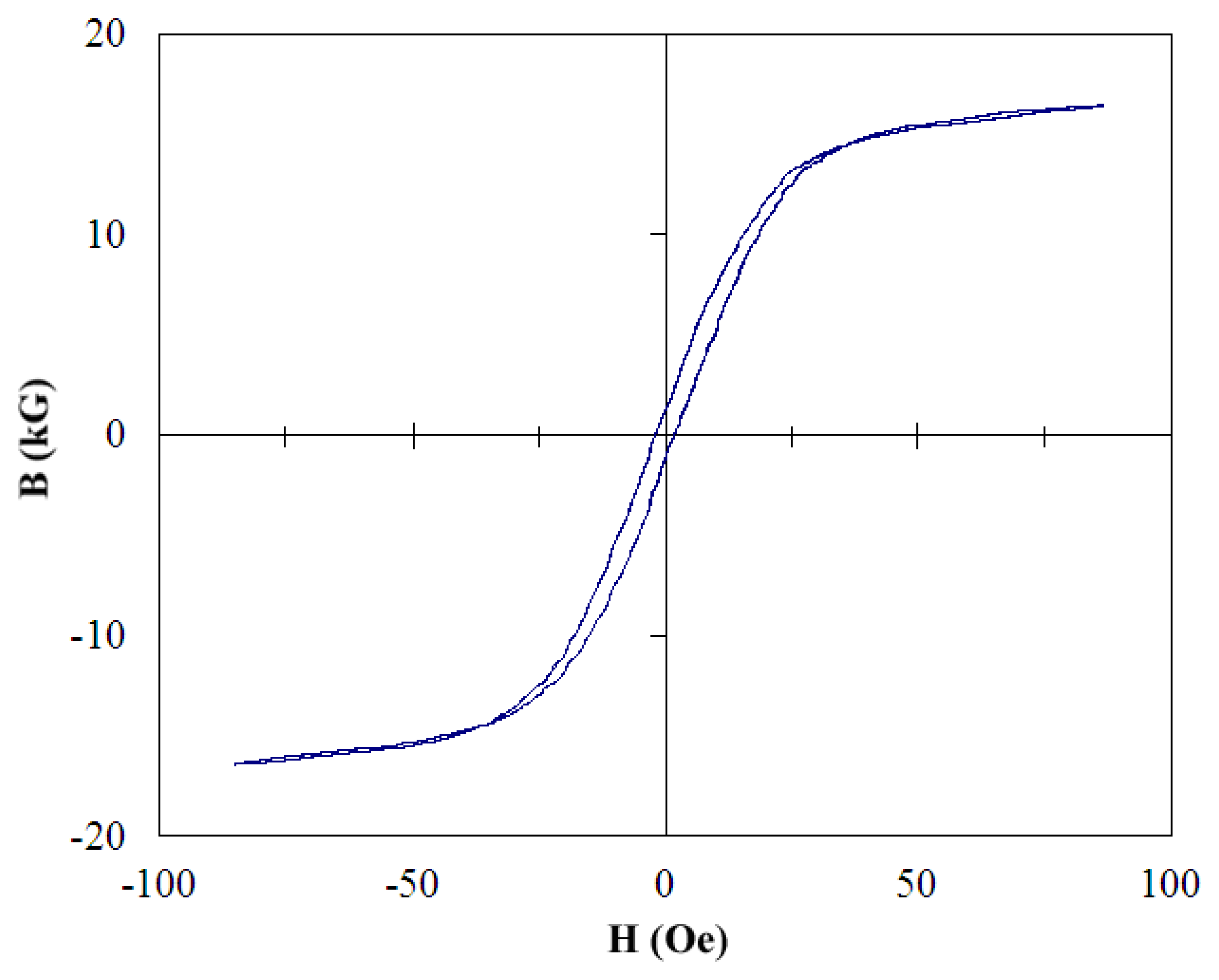
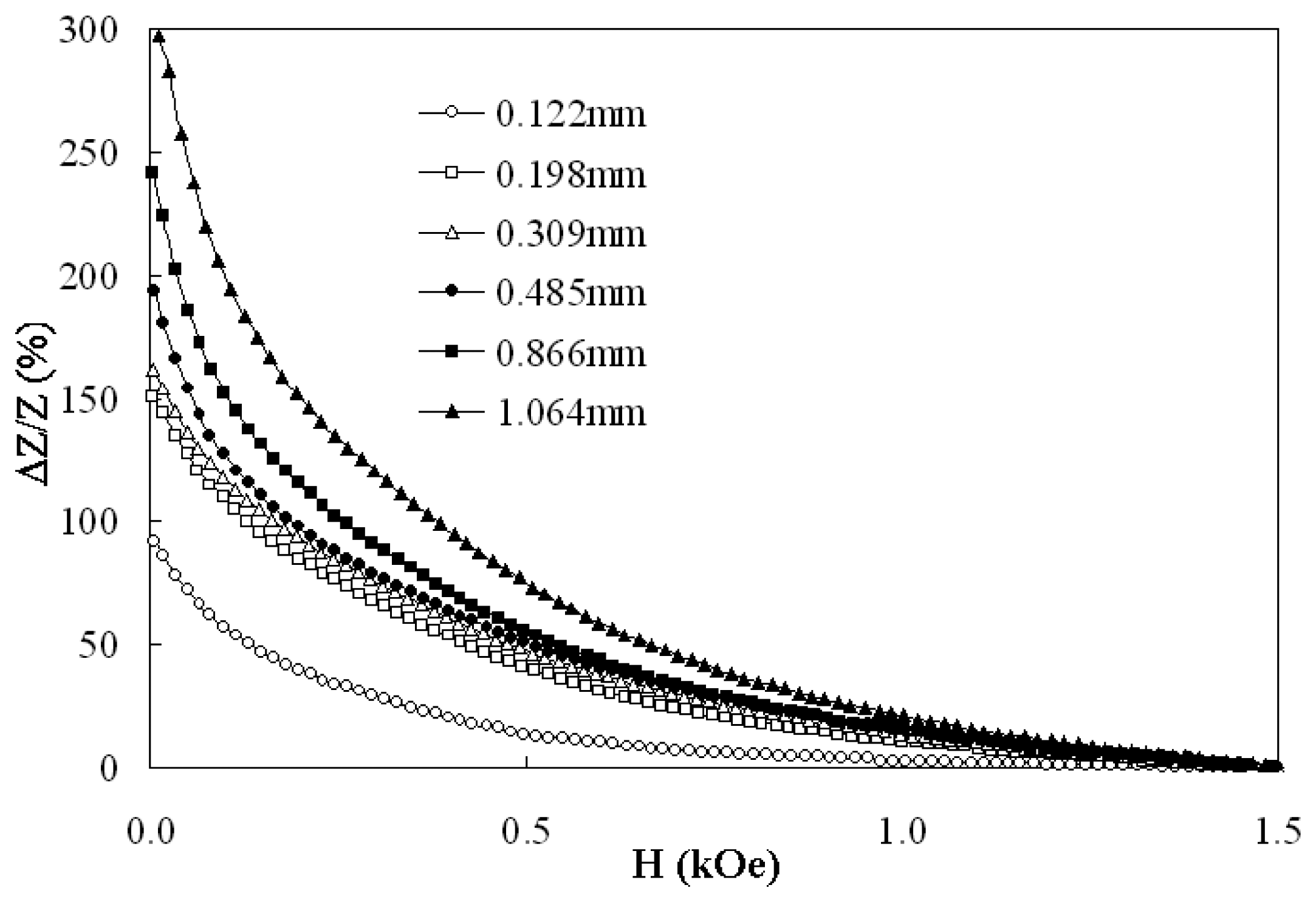
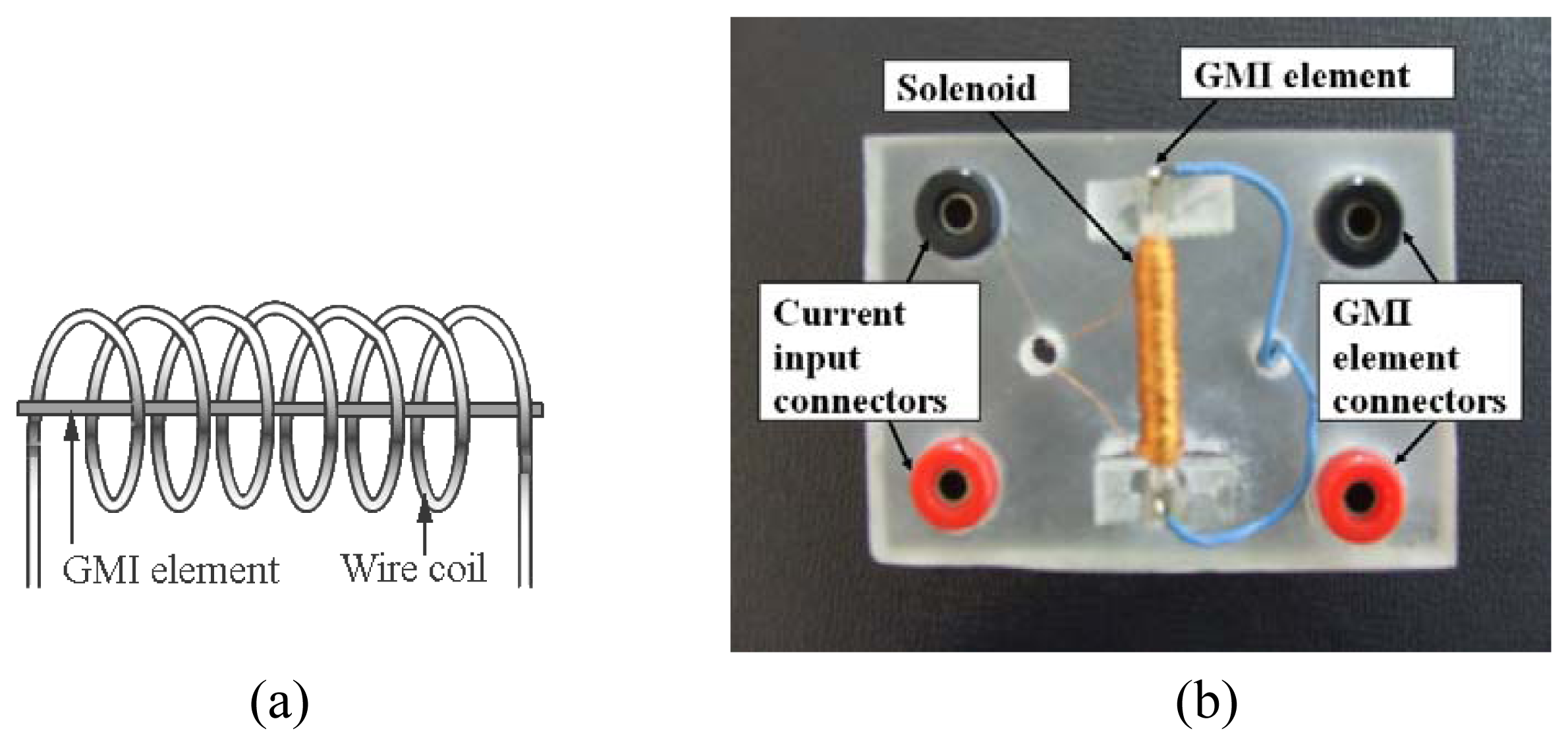
2. Magnetic and GMI properties
3. GMI sensor applications
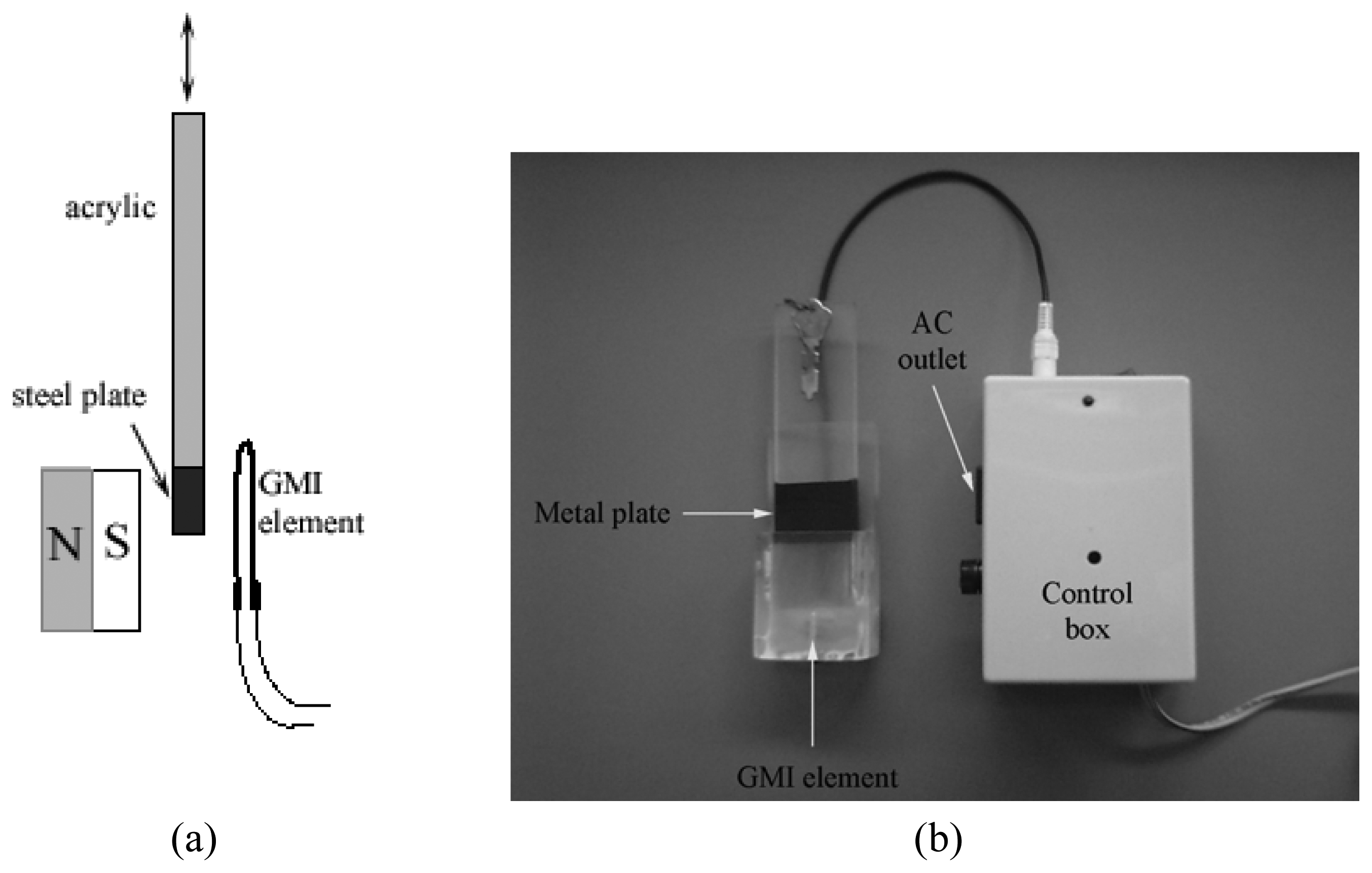
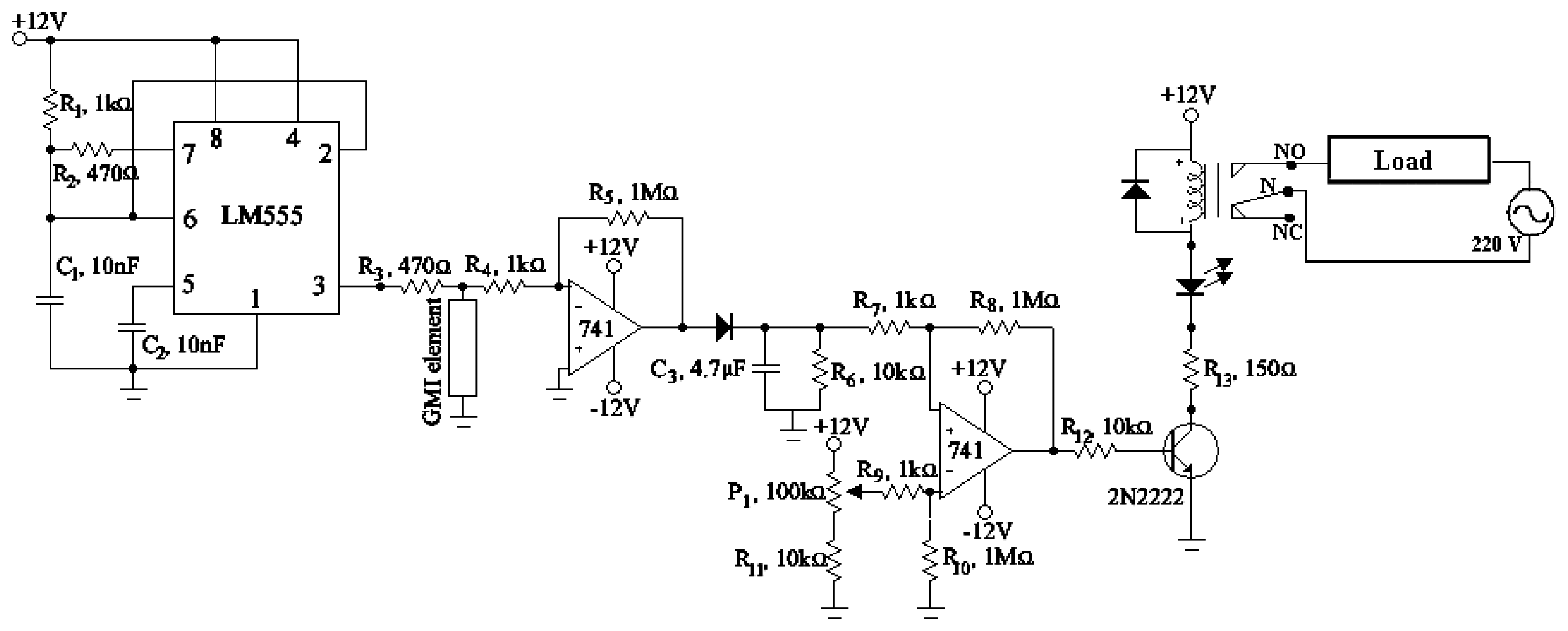
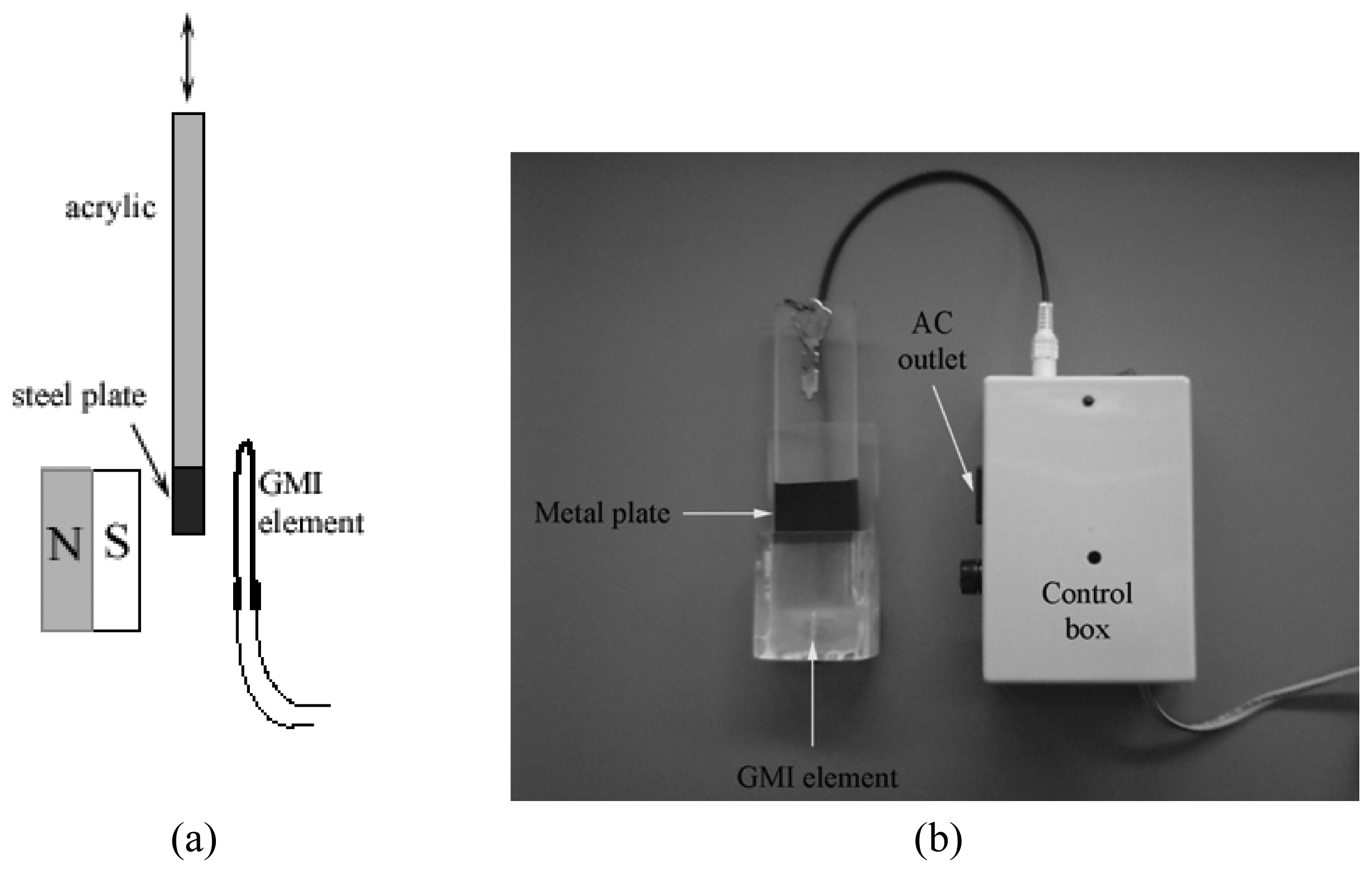
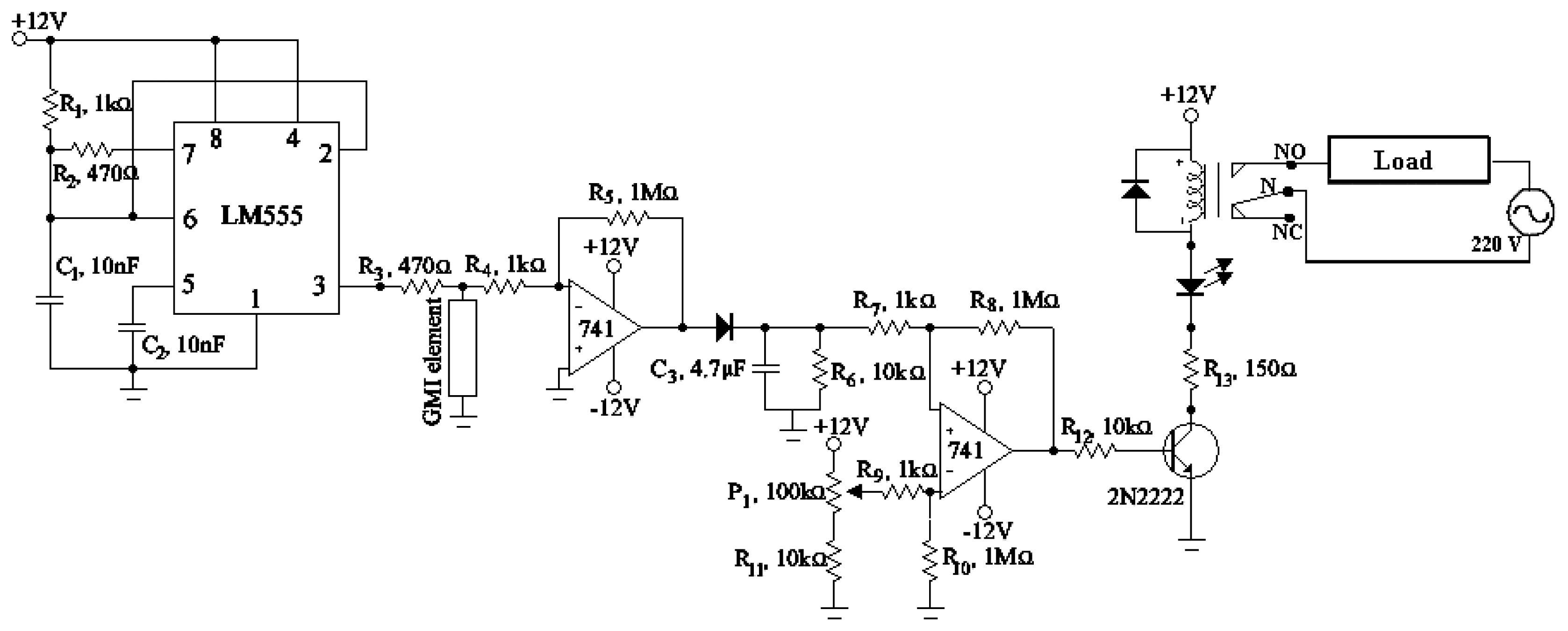
3.1 Slot key switch
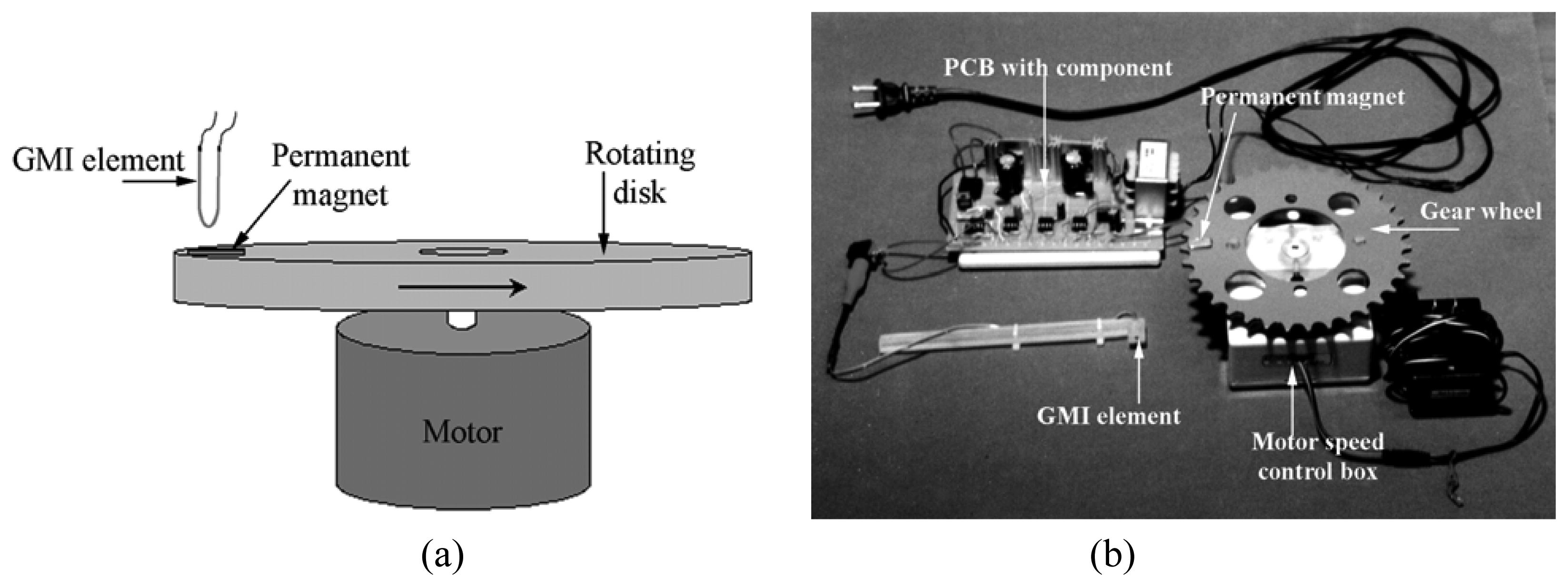
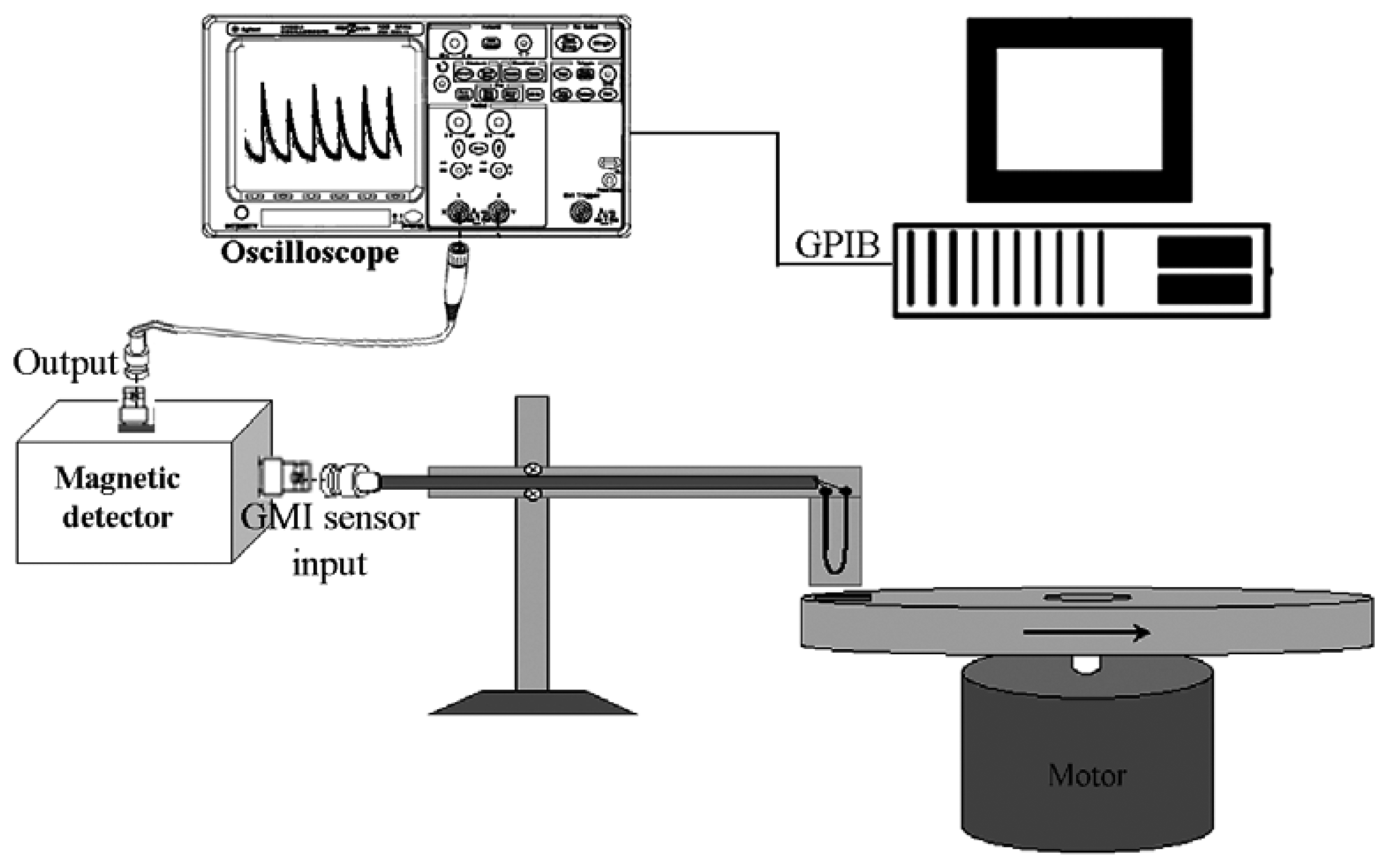
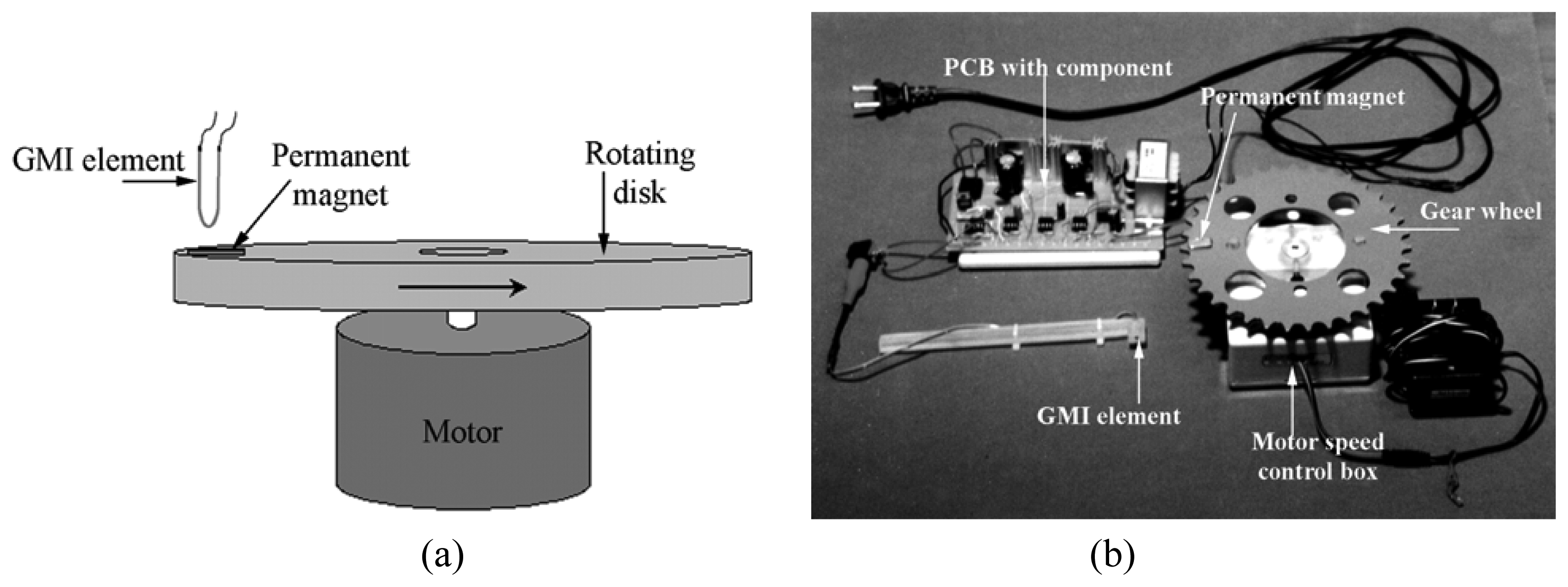
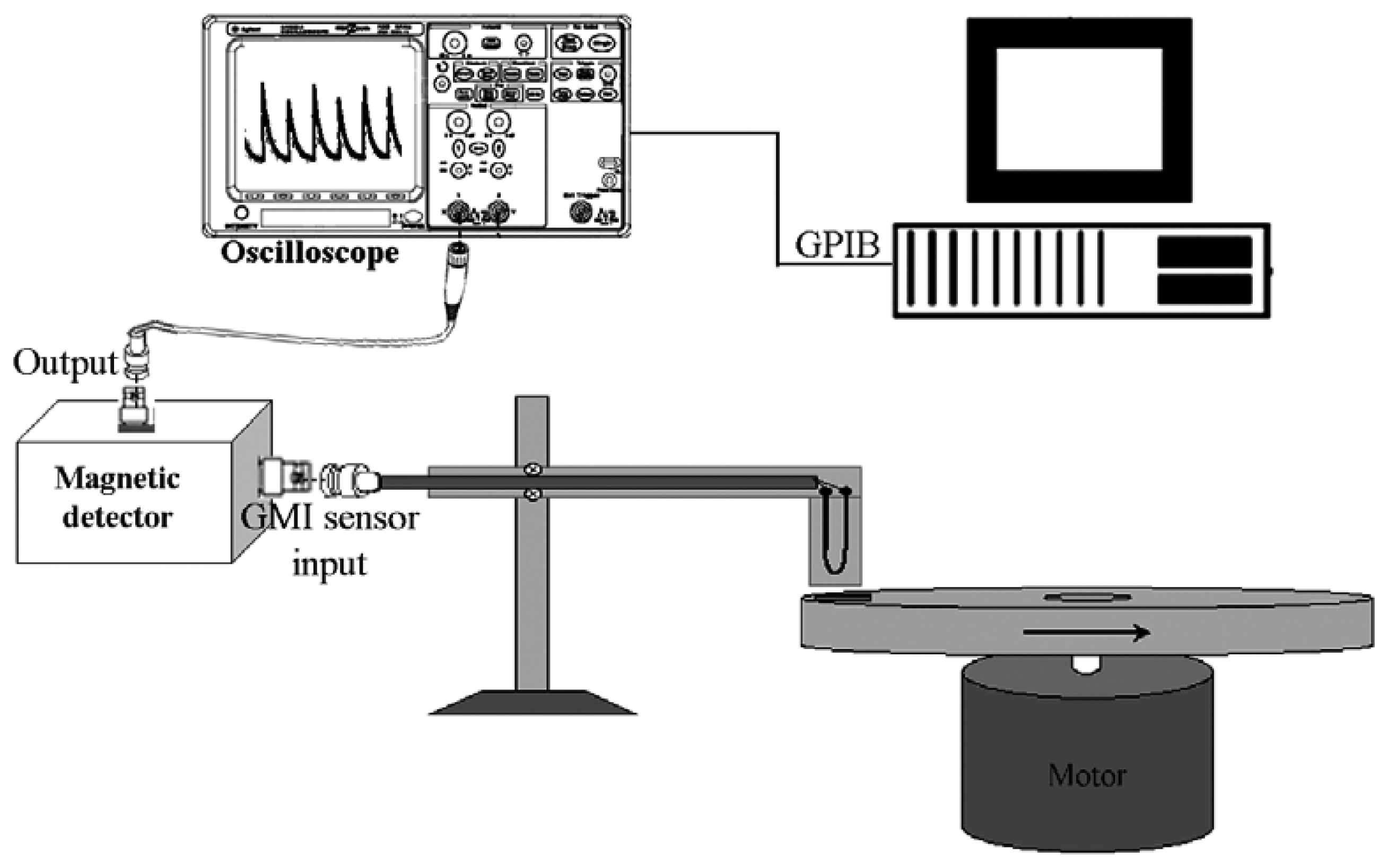
3.2 Angular velocity sensor
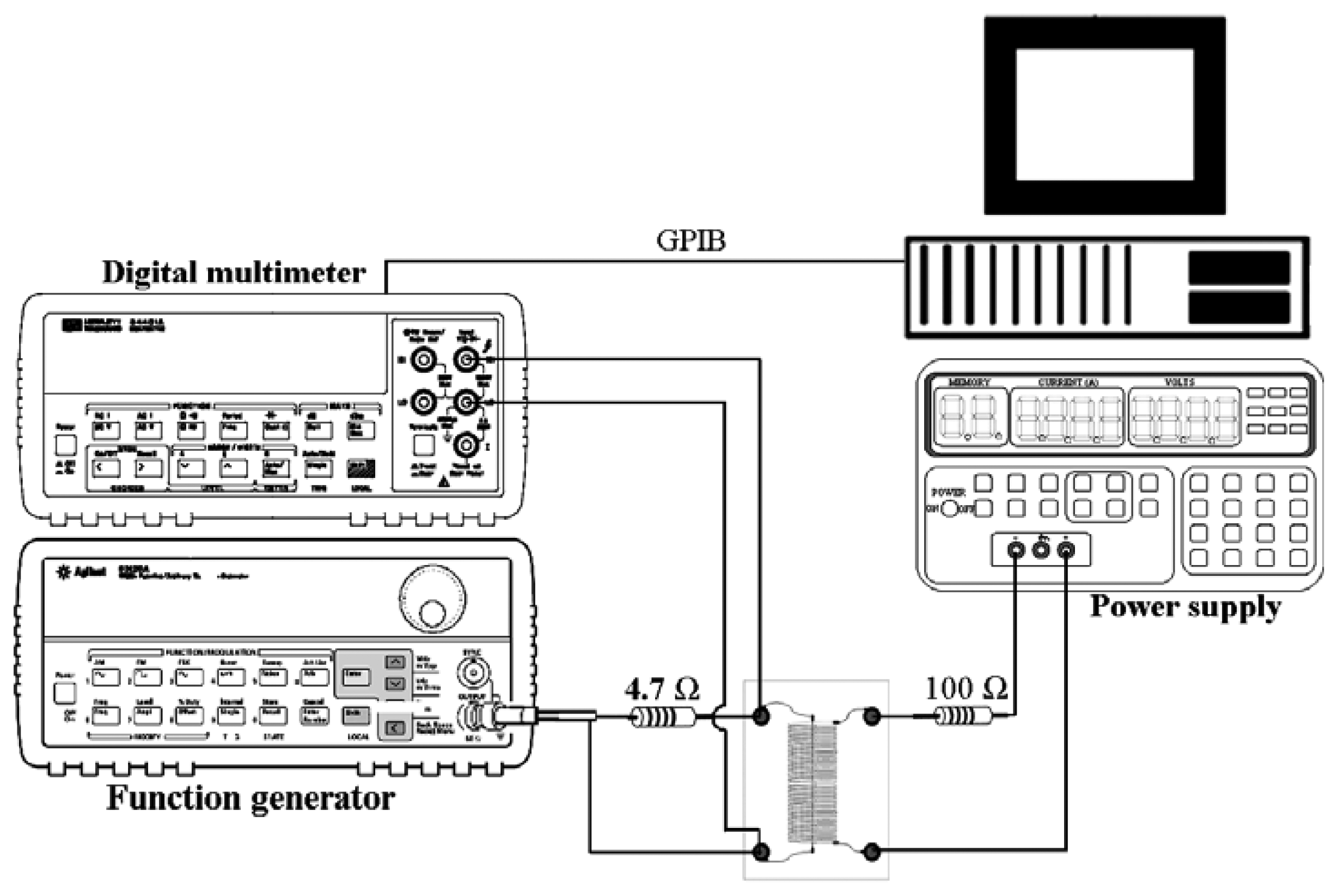
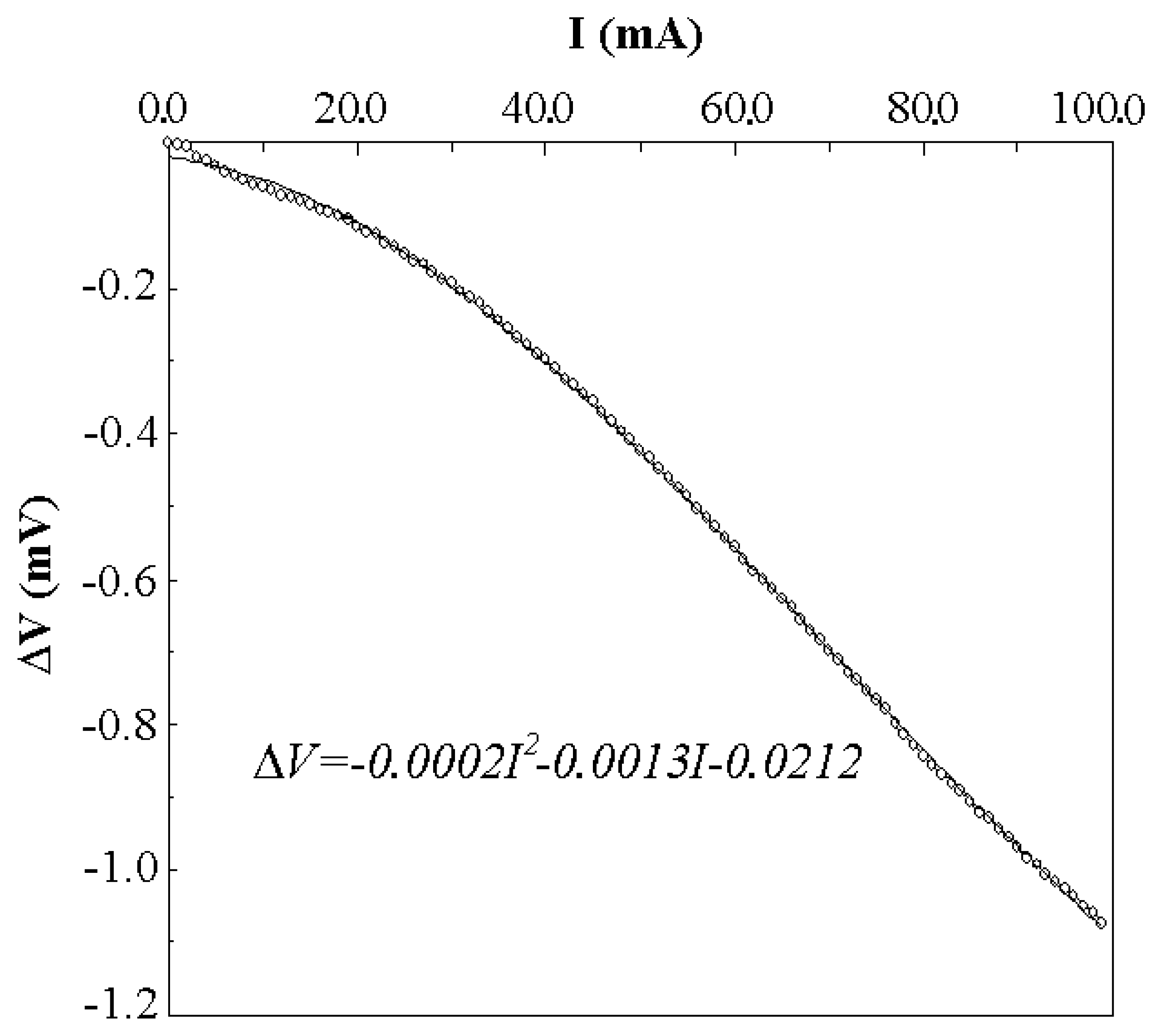
3.3 Current sensor
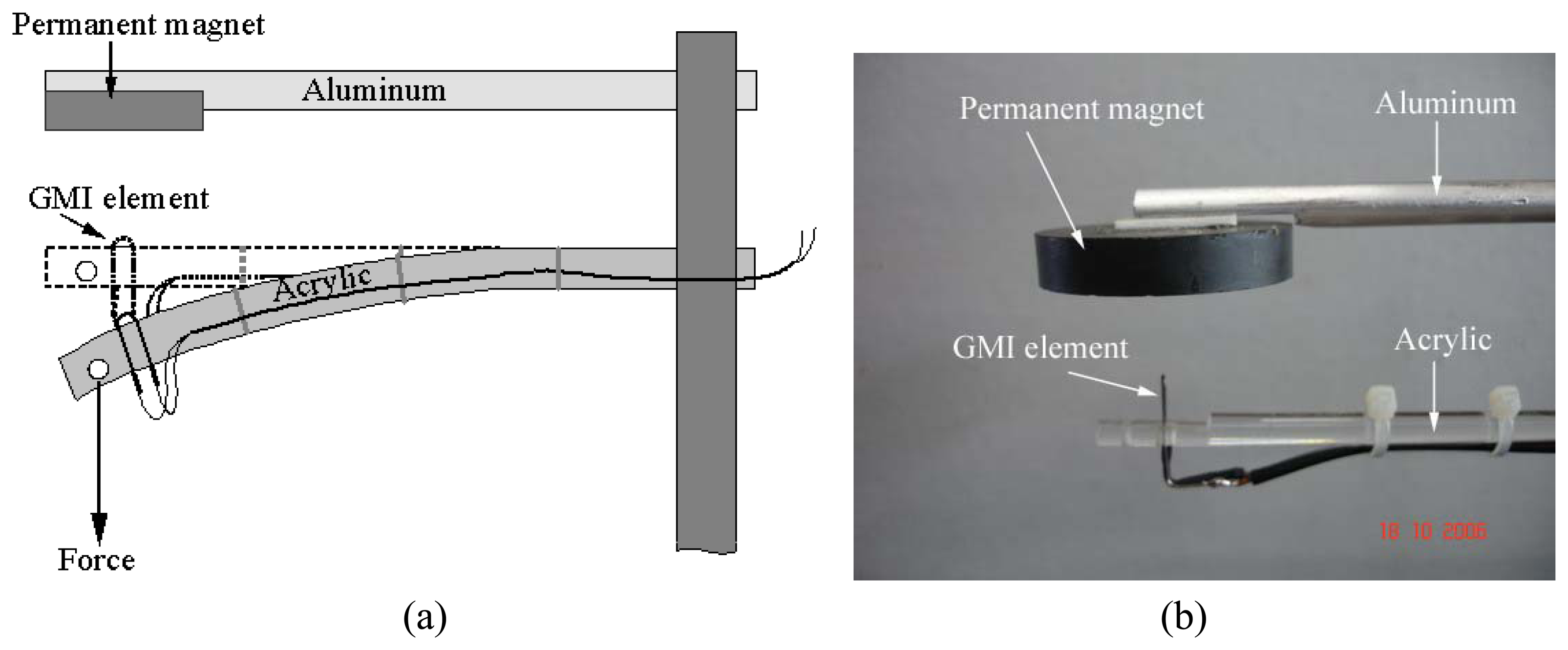
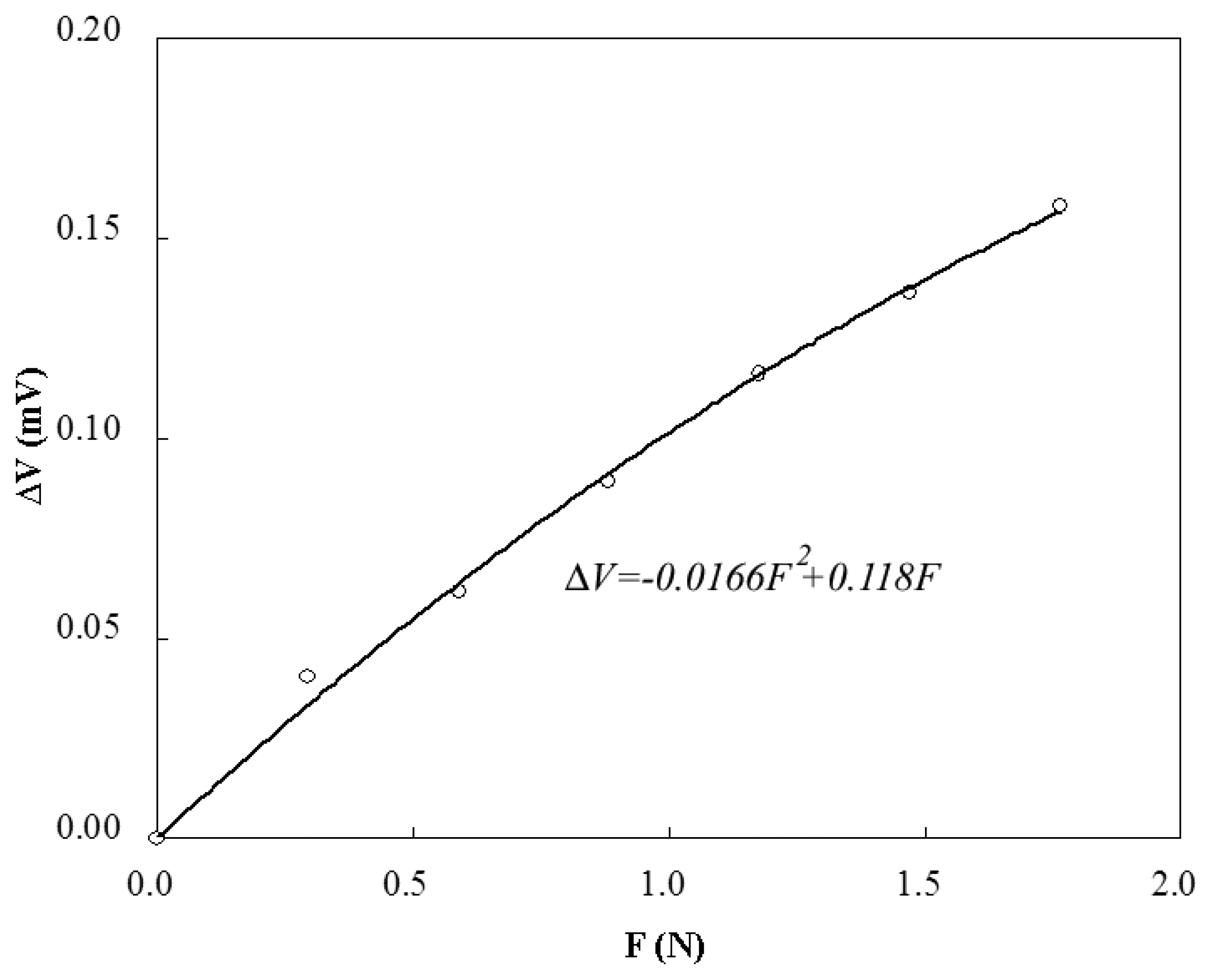
3.4 Force sensor
4. Conclusions
Supplementary Material
Supplementary Material: Supplementary material file for Figure 3: http://www.mdpi.org/sensors/papers/8031575-1.mpg; for Figure 5: http://www.mdpi.org/sensors/papers/s8031575-2.mpg.
Acknowledgments
References
- Beach, R.S.; Berkowitz, A. E. Giant magnetic field dependent impedance of amorphous FeCoSiB wire. Appl. Phys. Lett. 1994, 64, 3652–3654. [Google Scholar]
- Panina, L. V.; Mohri, K. Magnetoimpedance effect in amorphous wires. Appl. Phys. Lett. 1994, 65, 1189–1191. [Google Scholar]
- Sirisathitkul, C.; Jantaratana, P. Giant magnetoimpedance of electrodeposited Co/Cu/Co on Ag wires. J. Phys. D: Appl. Phys. 2007, 40, 4431–4435. [Google Scholar]
- Pal, S. K.; Manik, N. B.; Mitra, A. Dependence of frequency and amplitude of the ac current on the GMI properties of Co based amorphous wires. Mater. Sci. Eng. A 2006, 415, 195–201. [Google Scholar]
- Phan, M. H.; Peng, H. X.; Wisnom, M. R.; Yu, S. C.; Kim, C. G.; Nghi, N. H. Effect of annealing temperature on permeability and giant magneto-impedance of Fe-based amorphous ribbon. Sens. Actuat. A 2006, 129, 62–65. [Google Scholar]
- Garcia-Arribas, A.; Saad, A.; Orue, I.; Kurlyandskaya, G. V.; Barandiaran, J. M.; Garcia, J. A. Non-linear magnetoimpedance in amorphous ribbons: Large asymmetries and angular dependence. Sens. Actuat. A 2006, 129, 275–278. [Google Scholar]
- Kurlyandskaya, G. V.; Miyar, V. F. Surface modified amorphous ribbon based magnetoimpedance biosensor. Biosens. Bioelectron. 2007, 22, 2341–2345. [Google Scholar]
- Chiriac, H.; Herea, D. D.; Corodeanu, S. Microwire array for giant magneto-impedance detection of magnetic particles for biosensor prototype. J. Magn. Magn. Mater. 2007, 311, 425–428. [Google Scholar]
- Zhao, Z.; Li, Y. M.; Cheng, J.; Xu, Y. F. Current sensor utilizing giant magneto-impedance effect in amorphous ribbon toroidal core and CMOS inverter multivibrator. Sens. Actuat. A 2007, 137, 64–67. [Google Scholar]
- Kollu, P.; Kim, C.; Yoon, S. S.; Kim, C. O. Highly sensitive giant magneto impedance sensor with LC pick-up circuit. Sens. Lett. 2007, 5, 157–161. [Google Scholar]
- Tan, K.; Komakine, T.; Yamakawa, K.; Kayano, Y.; Inoue, H.; Yamaguchi, M. Detection of high-frequency magnetic fields by a GMI probe. IEEE Trans. Magn. 2006, 42, 3329–3331. [Google Scholar]
- Jantaratana, P.; Sirisathitkul, C. Giant magnetoimpedance in silicon steels. J. Magn. Magn. Mater. 2004, 281, 399–404. [Google Scholar]
- Yabukami, S.; Mawatari, H.; Horikoshi, N.; Murayama, Y.; Ozawa, T.; Ishiyama, K; Arai, K. I. A design of highly sensitive GMI sensor. J. Magn. Magn. Mater. 2005, 290-291, 1318–1321. [Google Scholar]
- Alves, F.; Bensalah, A. D. New 1D–2D magnetic sensors for applied electromagnetic engineering. J. Mater. Proc. Tech. 2007, 181, 194–198. [Google Scholar]
- Honkura, Y. Development of amorphous wire type MI sensors for automobile use. J. Magn. Magn. Mater. 2002, 249, 375–381. [Google Scholar]
- Zhan, Z.; Yaoming, L.; Jin, C.; Yunfeng, X. Current sensor utilizing giant magneto-impedance effect in amorphous ribbon toroidal core and CMOS inverter multivibrator. Sens. Actuat. A 2007, 137, 64–67. [Google Scholar]
- Nesteruk, K.; Kuzminski, M.; Lachowicz, H. K. Novel magnetic field meter based on giant magneto-impedance (GMI) effect. Sens. Trans. Mag. 2006, 65, 515–520. [Google Scholar]

© 2008 by MDPI Reproduction is permitted for noncommercial purposes.
Share and Cite
Jantaratana, P.; Sirisathitkul, C. Low-cost Sensors Based on the GMI Effect in Recycled Transformer Cores. Sensors 2008, 8, 1575-1584. https://doi.org/10.3390/s8031575
Jantaratana P, Sirisathitkul C. Low-cost Sensors Based on the GMI Effect in Recycled Transformer Cores. Sensors. 2008; 8(3):1575-1584. https://doi.org/10.3390/s8031575
Chicago/Turabian StyleJantaratana, Pongsakorn, and Chitnarong Sirisathitkul. 2008. "Low-cost Sensors Based on the GMI Effect in Recycled Transformer Cores" Sensors 8, no. 3: 1575-1584. https://doi.org/10.3390/s8031575