1. Introduction
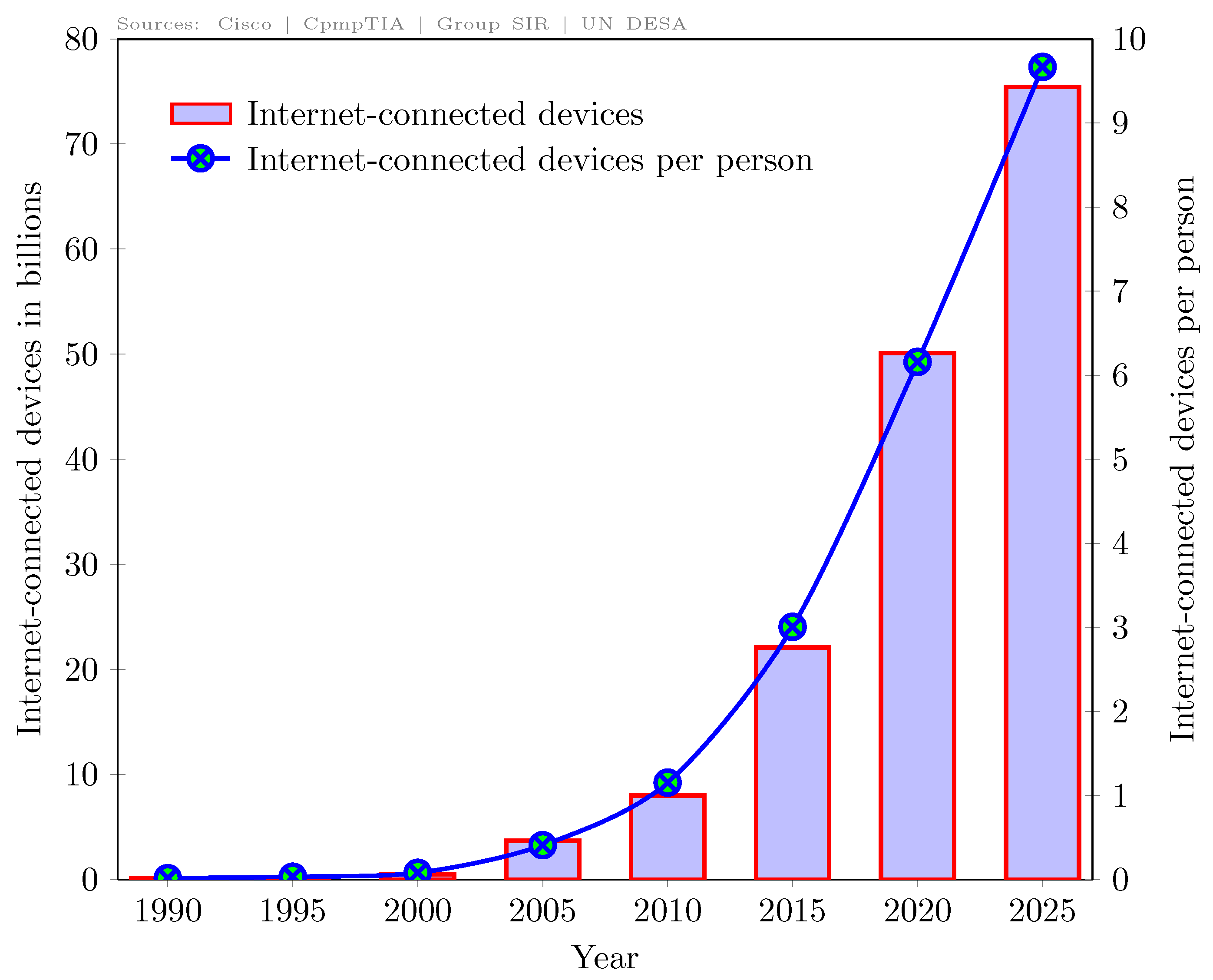
In recent decades, Internet-of-Things (IoT) technology has drastically increased the number of devices connected to the Internet due to smart, low-cost, and low-power wireless objects like microcontrollers, sensors, actuators, etc. From human population prospects and some recent estimates [
1,
2,
3], we have calculated that the count of Internet-connected devices will reach around 10 per person by 2025 if distributed evenly across the world as shown in
Figure 1. This simply translates that the count of Internet-connected devices will be approximately 10 times more than the human population over this planet by 2025, which is more than 240% of 2015. The rapid growth of such IoT-enabled devices can revolutionize human lives in terms of the smart grid, smart cities, smart farming, connected health and much more [
4,
5]. However, it will require new communication technologies, purpose-built protocols and more spectrum otherwise. Furthermore, most of the IoT-enabling technologies such as WiFi, Bluetooth, Zigbee, RFID, etc. depend on the Industrial Scientific and Medical (ISM) bands for the Internet. Unfortunately, spectrum in ISM bands is limited. Therefore, it could not meet the demand for IoT devices in the near future.
The Cognitive Radio (CR) is considered as a promising technology that can resolve such a spectrum shortage issue. Therein, the unlicensed Secondary User (SUs) can adapt their operational parameters to exploit the white spaces in licensed channels [
6,
7,
8,
9]. The SUs can occupy the licensed channels whenever Primary User (PUs) are inactive in order to avoid the catastrophic interference. Once a PU returns, SUs must vacate the occupied channel within a tolerable delay [
10]. This is so that a CR system is expected to be more than a conventional radio since it should accurately detect the transmission opportunities, learn from the environment, and take spontaneous actions to switch the licensed channels. One CR network can be deployed in a centralized or an ad hoc mode. CR ad hoc networks are more suitable to the IoT environment due to low cost, less complexity and ease of installation. However, such systems are prone to the hidden primary terminal problem due to decentralized environment, multipath fading and imperfect sensing [
11,
12,
13].
In classical CSMA/CA protocol [
14], a station identifies the state of the channel as idle or busy through the carrier sense mechanism before it enables collision avoidance and data transmission procedures. The carrier sensing includes sensing a channel by Clear Channel Assessment function to avoid the transmission overlap and the Network Allocation Vector (NAV) function to reserve the channel for data transmission. However, carrier sensing is limited because it is carried out at the high Signal-to-Noise-Ratio (SNR) regime, and so vulnerable to the hidden primary terminal problem. For example, if a PU is positioned outside the carrier sense range of a SU transmitter in a CR ad hoc network, it is hard to identify the activity status of this PU through the carrier sensing mechanism. In that case, SU transmitter can create harmful interference to the PU receiver. On the other hand, the spectrum sensing method such as energy detection, or cyclostationary feature detection mechanism [
15,
16,
17] can be carried out in low SNR regime, but it requires significant time at the transmitter and receiver while introducing greater incidences of false alarm and misdetection.
In CR ad hoc networks, there exists a rendezvous problem among SUs as well. One popular approach in this connection is to use a dedicated out-of-band licensed channel, called Common Control Channel (CCC), so that SUs can coordinate each other to achieve rendezvous [
18,
19]. Nevertheless, CCC-based Medium Access Control (MAC) protocols theoretically look simple, but practically they are not much attractive due to the following drawbacks [
20,
21,
22]. First, it is usually hard to identify a CCC throughout the network because of variations in time, space, and frequency. Second, the allocation cost and management issues of CCC have put forwarded the following key questions: “Who will offer CCC services?”; “How much the cost it would have?”; “What would be the payment method?” and “What happens if it is free?”, since a freely available CCC has a close resemblance to the unlicensed ISM bands. In that case, how to prevent such a free channel being used by the others for other than its sole purpose. Then, not only the traffic of other users can degrade the network performance, but also the appearance of PUs could measurably block the SUs’ access on CCC. Conversely, a dedicated CCC leased from the primary network is literally against the underlying objectives of the CR system. Third, the bandwidth limitation may lead to the early saturation of the control channel, and thus it could create bottleneck problem in the network. Finally, the channel security vulnerabilities and the single point of failure are the void open issues in this regard. For example, a simple jamming or Denial-of-Service attack could disrupt the functionality of the entire network.
The Channel Hopping (CH) mechanisms otherwise are of interest since they do not require CCC to achieve rendezvous [
23,
24,
25]. The CH method is inspired by the Adaptive Frequency Hopping (AFH) of Bluetooth technology [
26], where the Bluetooth nodes in piconet hop channels following a CH sequence generated by the master device. The AFH is simple in design yet not feasible in CR-based IoT networks due to their large scale environment. However, CH is adopted in the CR system with some variations into two major categories called sequence-based CH and random CH. These mechanisms are sufficiently immune to the vulnerabilities that the CCC approach suffers. In sequence-based CH, each SU transmitter visits (or hops) all the available channels through a predefined hopping pattern until it established a communication link with the intended SU receiver [
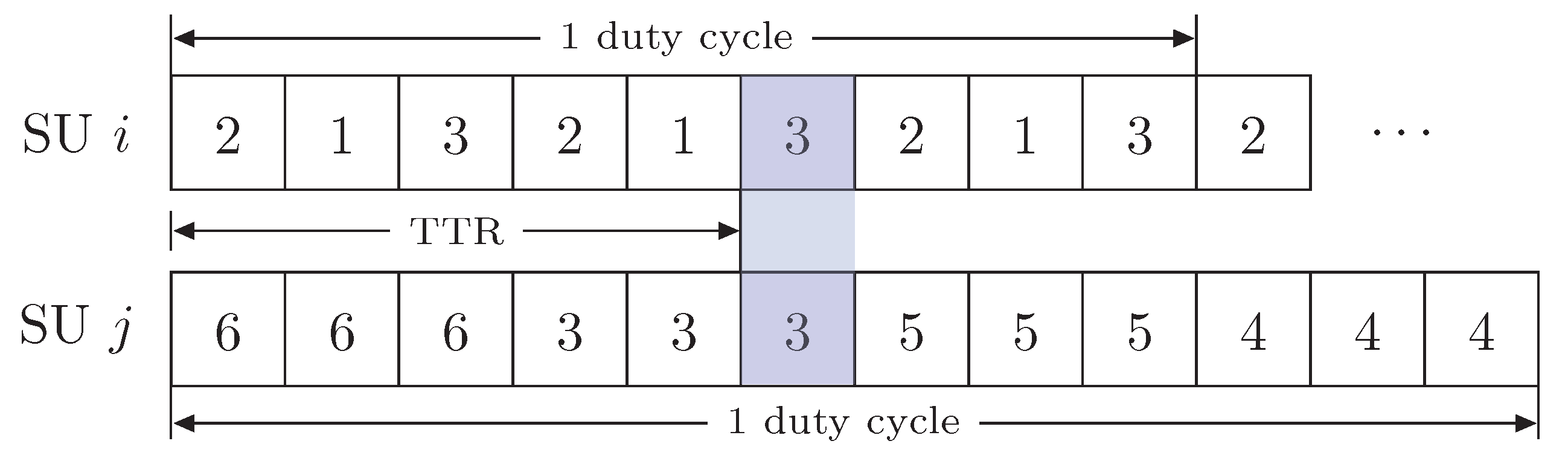
23]. On contrary to this, each SU under the random CH visits network channels in a random pattern at a certain hopping rate. In such CH schemes, the total time is first divided into various time slots of fixed duration. Then, the rendezvous process is started where each SU tries to pair with its counterpart at a common available channel. Towards this end, we henceforth termed the number of slots used by a pair of SUs in the discovery of a common channel as Time to Rendezvous (TTR).
The random CH cannot guarantee that two SUs will successfully establish a rendezvous because its TTR is not upper-bounded. However, sequence-based CH has the advantage of finite TTR. It can further be evaluated under synchronous and asynchronous approaches in terms of synchronization of SUs. Synchronous CH approaches assume global clock synchronization in secondary network. In that case, a pair of SUs can start CH simultaneously and when their CH sequences overlap, rendezvous process is achieved successfully. On the other hand, asynchronous CH approaches are supposed to be the candidate solution that does not require global clock synchronization. Both synchronous and asynchronous schemes can be based on either symmetric or asymmetric channel paradigms. In the symmetric channel paradigm, a pair of indented SUs have the same number of available channels, while SUs may have a different number of available channels in the asymmetric channel paradigm. In CR ad hoc networks, the number of available channels may not be similar for SUs due to their different locations. Therefore, this can make the rendezvous process more complex.
In multichannel CR networks, a pair of SUs may have multiple available channels that the rendezvous algorithm can identify during the MAC operation. The intermediate question is how to select the channel, and how to carry out data transmission once a channel is selected. At the same time, PUs can autonomously adopt a variety of applications (e.g., voice, video, or data) with different traffic patterns [
27]. Therefore, under the uneven traffic pattern and unpredictable behavior of PUs, channel selection becomes a complex balancing act. For best channel selection, a CR may learn PUs’ and SUs’ traffic by maintaining a channel history, which can make a MAC protocol more efficient. In literature, channel selection is mostly done based on the current information of the network channels. The available channels could be assumed as equally good [
28,
29] or evaluated by bandwidth [
30,
31] or categorized by the least interference level [
32,
33]. A CR randomly detects transmission opportunities by spectrum sensing or/and carrier sensing and can select a channel at a moment that is otherwise frequently used by the PUs or/and SUs. Moreover, if the underlying scheme (e.g., bandwidth-based selection) is already in use by PUs, SUs may select a bad channel. Therefore, to maintain seamless transmissions in secondary network, it is desirable to adopt a ranked channel selection by MAC protocol, which should be based on the prior knowledge of the users’ traffic.
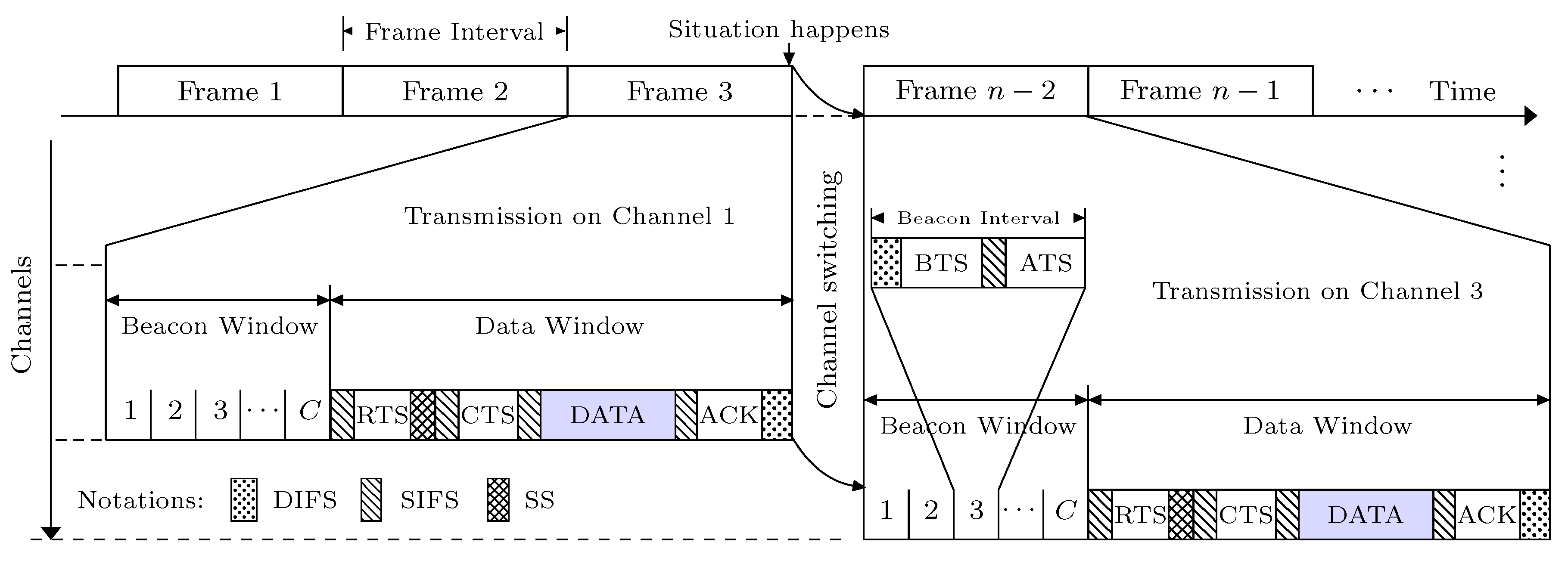
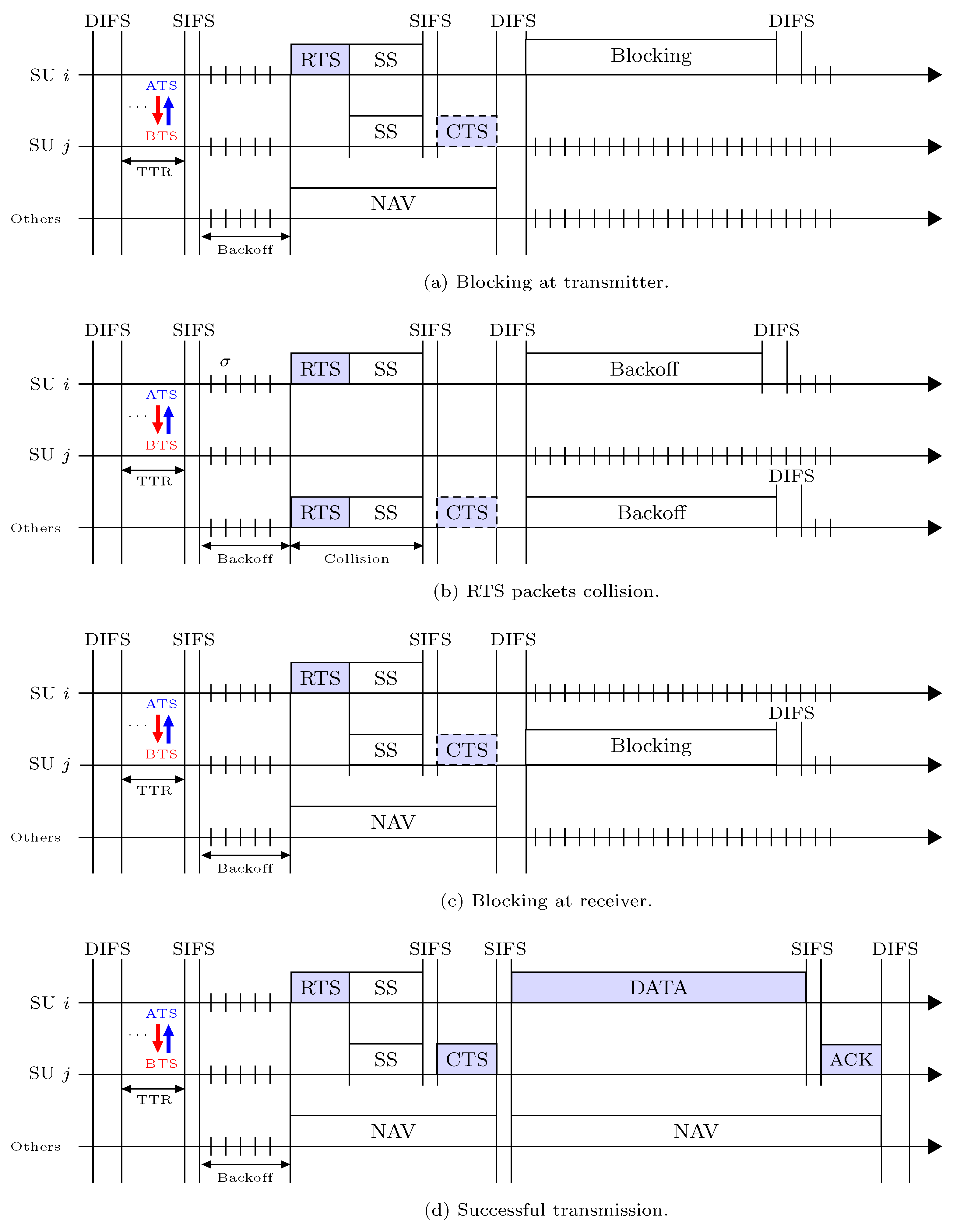
In this paper, we design a new MAC protocol, called Ranked Sense Multiple Access with Collision Avoidance (RSMA/CA), for multichannel CR-based IoT networks. The RSMA/CA is aimed to establish rendezvous between the pair of SUs by allocating one of the best channels based on the ranked selection without relying on the dedicated CCC. We tailor made the existing algorithms in BRACER [
34] to resolve the rendezvous problem in a fast time, in which a transmitter and its corresponding receiver individually construct their CH sequences in a beacon period first. Then, transmitter follows its CH sequence to hop and sense the ranked channels by carrier sensing. If a hopped channel is found idle for Data Interframe Space (DIFS) interval, it broadcasts a Beacon to Sense (BTS) packet to its corresponding receiver to achieve rendezvous. On the other hand, the receiver stays on ranked channels according to its own CH sequence. Therein, if the receiver decodes the BTS packet correctly, it then replies with the Acknowledge to Sense (ATS) packet to the transmitter and ensures rendezvous. Once the rendezvous is ensured, the transmitter broadcasts a Request to Sense (RTS) packet to its receiver in order to continue the mutual spectrum sensing in a data period. In the sequel, transmitter and its receiver conduct mutual spectrum sensing at the same time. If no PU is active around the transmitter and the receiver, then data transmission continues on the chosen ranked channel when receiver replies with the Clear to Sense (CTS) packet. Otherwise, SUs are blocked by spectrum sensing for a predefined period. The receiver replies with the ACK packet when it correctly receives the data packet. In case of collision, SUs nevertheless follow the backoff process as part in classical CSMA/CA protocol. We rank the channels based on the long term qualities as well as the SUs’ activities and PUs’ return rate to reduce interference and channel handoffs.
The key contribution of this paper is summarized as follows.
We propose a simple but immanent MAC protocol for multichannel channel CR-based IoT networks, which not only resolves the intrinsic hidden primary terminal problem but also fixes the classical hidden and exposed terminal problems at the same time.
We suggest algorithms for the construction of hopping sequences in secondary transmitter and receiver by modifying the exiting BRACER protocol in the minimal to achieve rendezvous in an efficient time.
We propose a novel ranking mechanism to downsize the available channels, which is based on the past information of the channels’ qualities as well as the activities of SUs and PUs enabling IoT devices selecting the best channels to reduce rendezvous time and plummet PUs’ interference and SUs’ collisions on those channels.
We analyze the normalized throughput of our proposed protocol with the Markov chain model and verify through the Monte Carlo simulations in the MATLAB. We also compared the throughput of our proposed MAC with that of the exiting BRACER protocol.
For the quick reference, we provide a summary of the acronyms in
Table 1. The rest of this paper is structured as follows. In
Section 2, we present an overview of the related works. In
Section 3, we define the system model. In
Section 4, we describe the proposed MAC protocol. In
Section 5, we investigate its performance and compared with the existing scheme in terms of normalized throughput. In
Section 6, we discuss the simulation results. Finally, we conclude the paper in
Section 7.
2. Related Works
Here, we give a brief overview of the related multichannel CR MAC protocols with the state-of-the-art channel selection algorithms adopted in the existing literature.
In [
23], an asynchronous Sequence-Based Rendezvous (SBR) scheme is proposed, which is based on the permutations of
C available channels. However, its average TTR is a quadratic function of
C. It requires higher access delay especially when the number of network channels is large. In [
35], two algorithms, called synchronous efficient channel hopping and asynchronous efficient channel hopping schemes, are proposed. Both algorithms build CH sequences to work in the symmetric channel mechanism in a way similar to that in SBR scheme. This is how they are less attractive for multichannel CR ad hoc networks under asymmetric channel conditions. In [
19], three algorithms called Modular Clock (MC), Generated Orthogonal Sequence (GOS), and Modified Modular Clock (MMC) are developed. MC and GOS work in the symmetric channel environment for a pair of SUs to generate predefined and random CH sequences, respectively. On the other hand, MMC is proposed for the asynchronous channel environment. However, all these three algorithms do not guarantee rendezvous in a finite time.
In [
36], a jump-stay based asymmetric mechanism is proposed that overcomes the drawbacks of the MC algorithm. This algorithm generates CH sequences with two different patterns, called jump and stay, each. In the jump pattern, a SU jumps (or hops) on
C available channels equal to the prime number (
) time slots, where
is larger than
C. In the stay pattern, it stays on a particular channel for
time slots to achieve rendezvous. The jump-stay algorithm guarantees rendezvous. However, its average TTR has polynomial complexity with respect to
C available channels. In [
37], an asynchronous CH algorithm is proposed, where each SU require a unique
n-bit pattern as an identification sequence. For that purpose, MAC address can be considered which can inflate the TTR due to 48-bit long identifier.
In [
38], a Quorum-based CH (QCH) system is introduced with two asynchronous algorithms to achieve rendezvous by the intersection property of quorums. This system requires a priori information of all SUs over the available channels, which often obtained through the network broadcasts with high power consumptions in SUs. Therefore, the feasibility of QCH system in the power contained networks is limited. In [
34], BRACER protocol is proposed to avoid broadcast collisions and achieve rendezvous in multichannel CR ad hoc networks. In BRACER, all SUs downsize the available channels in a way such that at least one common channel exists between the HSs of SUs. This scheme introduces two asynchronous algorithms to construct CH sequences in asymmetric channel paradigm and guarantee rendezvous. However, still there exists ample research room in multichannel CR ad hoc networks to reduce delay in the rendezvous operation.
In [
39], a decentralized MAC protocol is proposed, where PU traffic behavior is modeled based on the Partially Observable Markov Decision Process (POMDP). In POMDP, a reward-based suboptimal greedy approach is adopted by the SUs for the best channel selection. However, the transitional probabilities assumed in the Markov channel model with the advance knowledge of PUs’ slots makes this protocol unrealistic. In [
40], a slotted MAC protocol, called SYN-MAC, without CCC is proposed. In SYN-MAC, SUs are assumed to be equipped with two different radios. One radio is dedicated for listening to the control signal in a time slot, which is assigned to each of the available channels. Contrariwise, the other radio is reserved for serving the data traffic. To achieve synchronization, a SU transmits beacon messages separately on the available channels at the beginning of time slots. Similarly, the rest of the SUs tune their control radios on each of the available channels and exchange the available channel sets in response to the beacon messages received periodically. After synchronization, when a secondary transmitter wants to transmit a data packet to the specified secondary receiver, it blindly finds a common channel and exchanges control messages. After the successful sharing of control messages, data transmission starts. Although SYN-MAC works without CCC but its common channel selection from the available channel sets is prone to be reclaimed by the PU. In worse condition, PU is highly likely to reclaim the licensed channel just after its selection is made by the SU. Consequently, it will degrade the overall network performance.
3. System Model
We consider one decentralized secondary network with
M SUs and multiple primary networks with
C licensed channels. SUs can coexist with PUs yet cannot collaborate with each other. However, SUs can collaborate with each other through a peer-to-peer communication setup [
41]. SUs can occupy one of the licensed channels whenever PUs on that channel are inactive. However, SUs are obliged to vacate the channel when PUs are active. A transmitter SU
i and its receiver SU
j can sense their adjacent PUs as active or inactive by one of the spectrum sensing techniques such as energy detection, cyclostationary feature detection, and so on [
15,
16,
17].
The spectrum sensing at SU
i cannot detect the activity status of the adjacent PUs of SU
j due to its limited range. Hence, SU
j conducts spectrum sensing to detect the activity status of its adjacent PUs in conjunction with SU
i, which we called mutual spectrum sensing. In this sense, we called the adjacent PUs of SU
j as the hidden PUs of SU
i. However, spectrum sensing is not perfect due to false alarm and misdetection. We denote the false alarm probability and the misdetection probability of SU
i as
and
, respectively. False alarm implies when a SU detects an inactive PU as active due to sensing error. The false alarm probability by which a SU
i lose an opportunity can be found in [
15] as,
where
denote the complementary distribution function of a standard Gaussian variable.
,
,
, and
represent the sensing threshold, noise power, sensing time, and sampling rate of the rendezvous-channel, respectively. However, misdetection happens when a SU identifies the active PUs as inactive due to sensing error. The misdetection probability by which a SU
i creates interference is calculated in [
15] as,
where
denotes SNR of the primary signal measured at SU
i. The misdetection probability should be limited by a threshold
such that
to sufficiently protect the PUs.
6. Results and Discussion
In this section, we investigate the performance of our proposed RSMA/CA protocol and compare it with BRACER of [
34]. The performance results are verified by the Monte Carlo simulations, which are developed in the MATLAB with 10,000 runs. We consider the number of available channels as 20. The transmission rate is set equal for each channel. However, the channel quality varies in terms of SNR, SU activities and PU return rate according to the uniform distribution. For each channel, the SNR value is chosen from [−25, 25], the number of SUs is chosen from [2, 20], and PU return rate is chosen from [0.01, 0.25]. In a nutshell, the default simulation parameters are summarized in
Table 4.
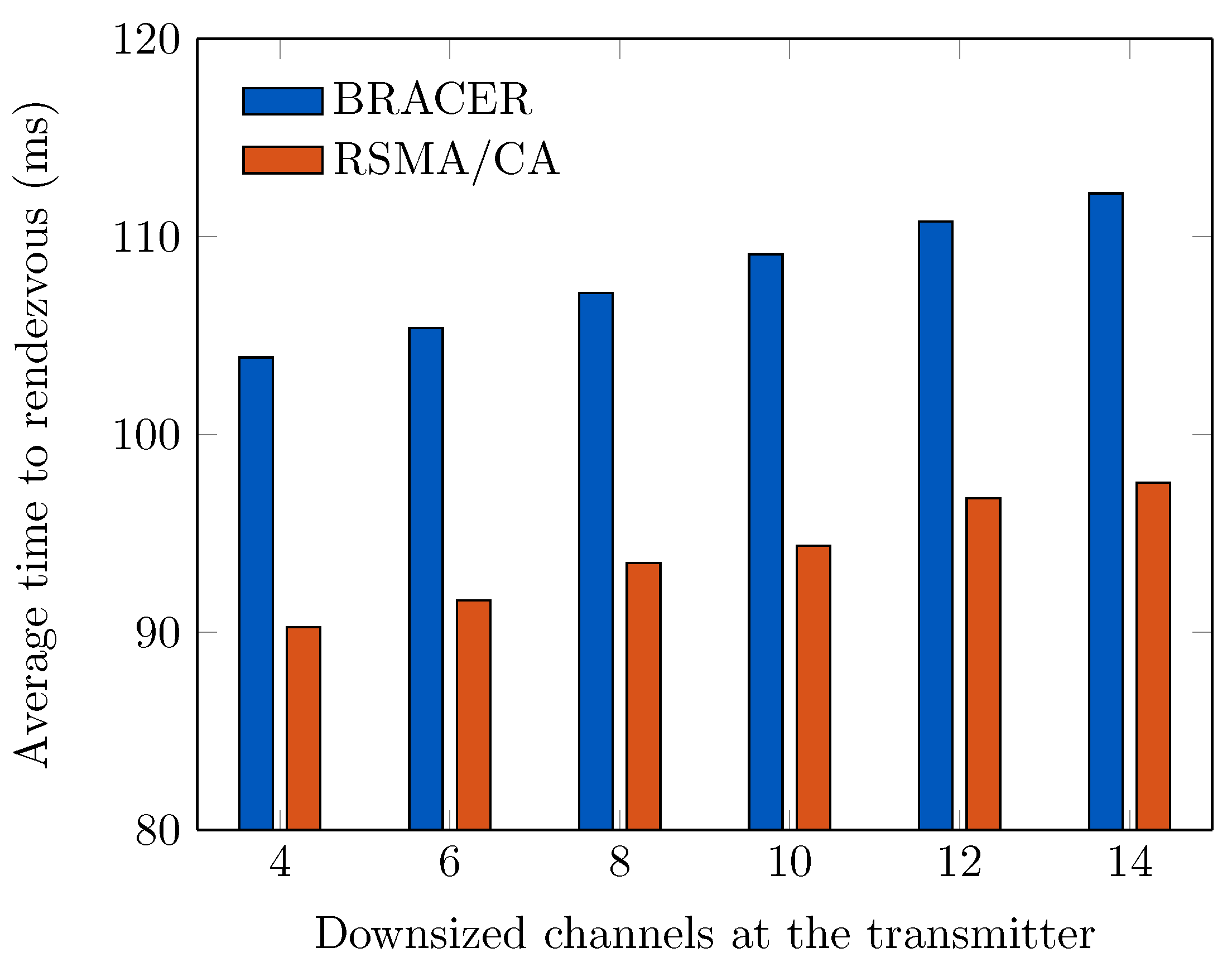
In
Figure 7, we show the average TTR where the size of downsized channels
Y at the transmitter varies from 2 to 14 on the fixed
Y (which is equal to 15) at the receiver. We witness that the average TTR increases steadily as the size of the downsized channel increases. This is so that a large
Y can yield large rendezvous overhead at the transmitter. We also witness that our RSMA/CA protocol outperforms BRACER due to its less rendezvous delay. Since the receiver in our RSMA/CA scheme stays for fewer slots on the ranked channels compared to that in BRACER protocol.
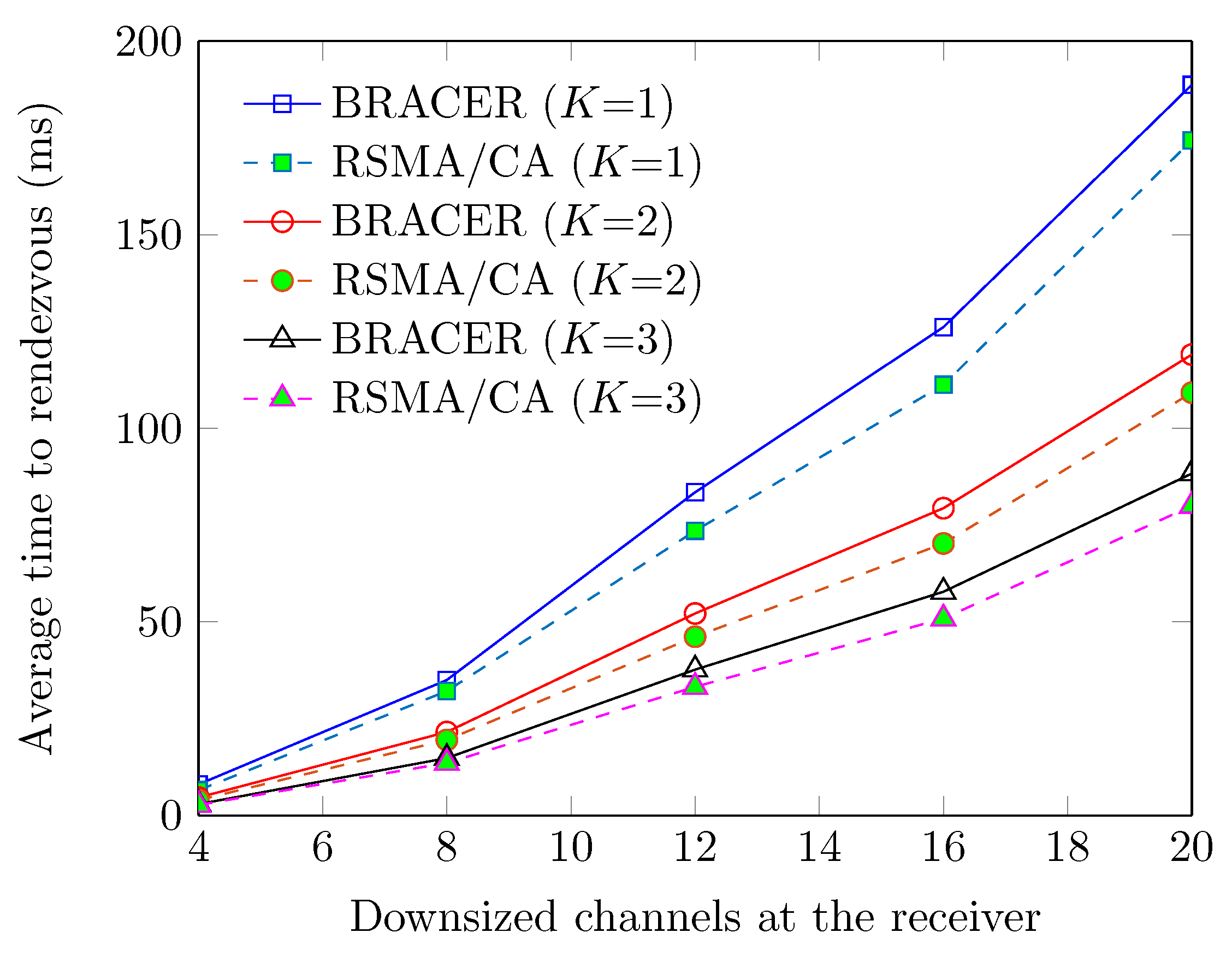
In
Figure 8, we also demonstrate how average TTR is affected on the fixed size of downsized channels (with
) at the transmitter when
Y at the receiver varies from 2 to 14 for various
Ks in HSs of transmitter and receiver. We see that the average TTR monotonically increases with the increase in
Y at the receiver due to the increased number of time slots in the duty cycle of the transmitter. Conversely, the value of average TTR decreases with the increase in common channels
K in HSs of the transmitters and their corresponding receivers. This is because as long as the values of
K increased, chances of rendezvous are increased and so the rendezvous is achieved successfully in a less delay. We also observe that the proposed RSMA/CA protocol outperforms BRACER due to fast rendezvous between SUs.
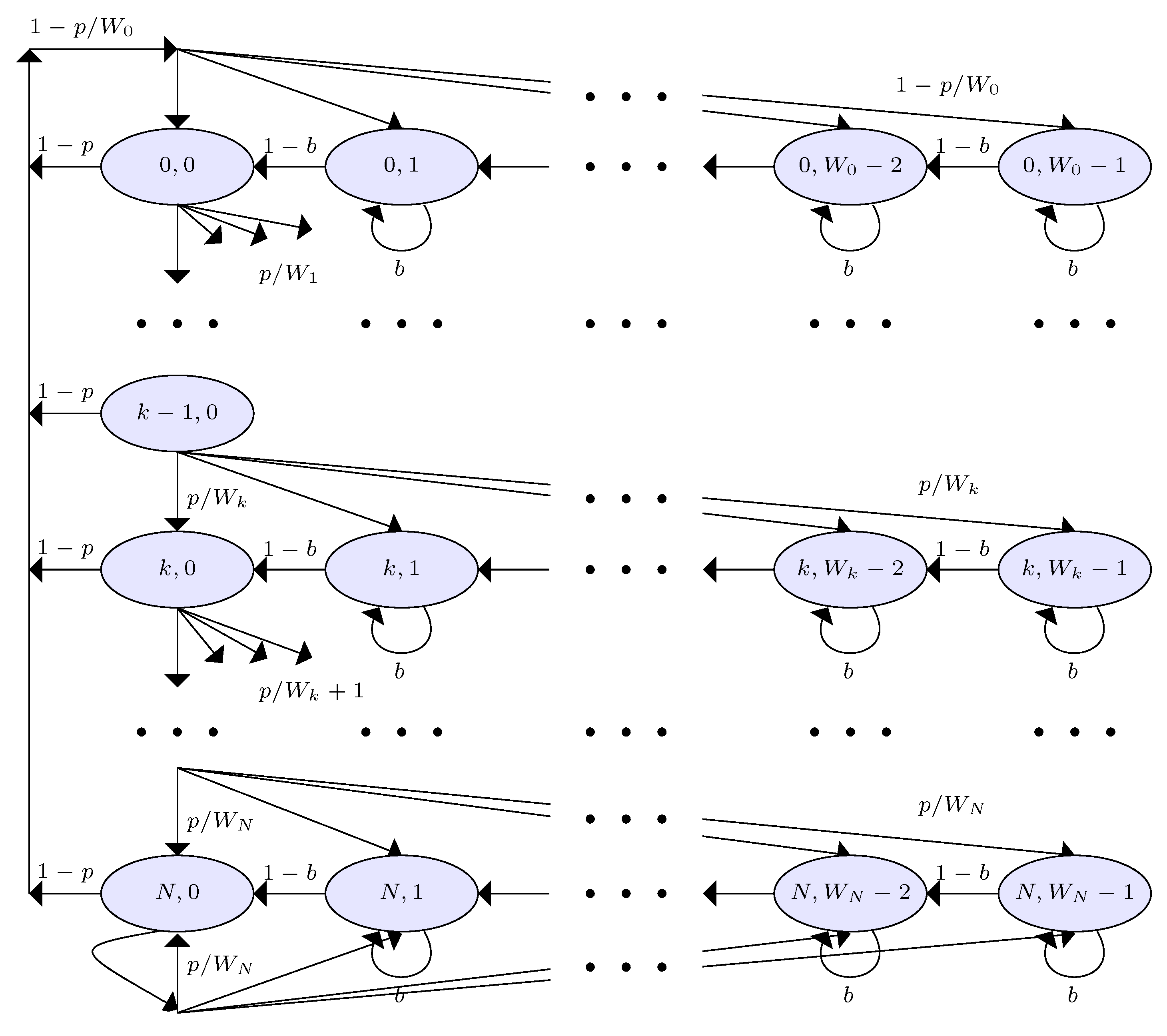
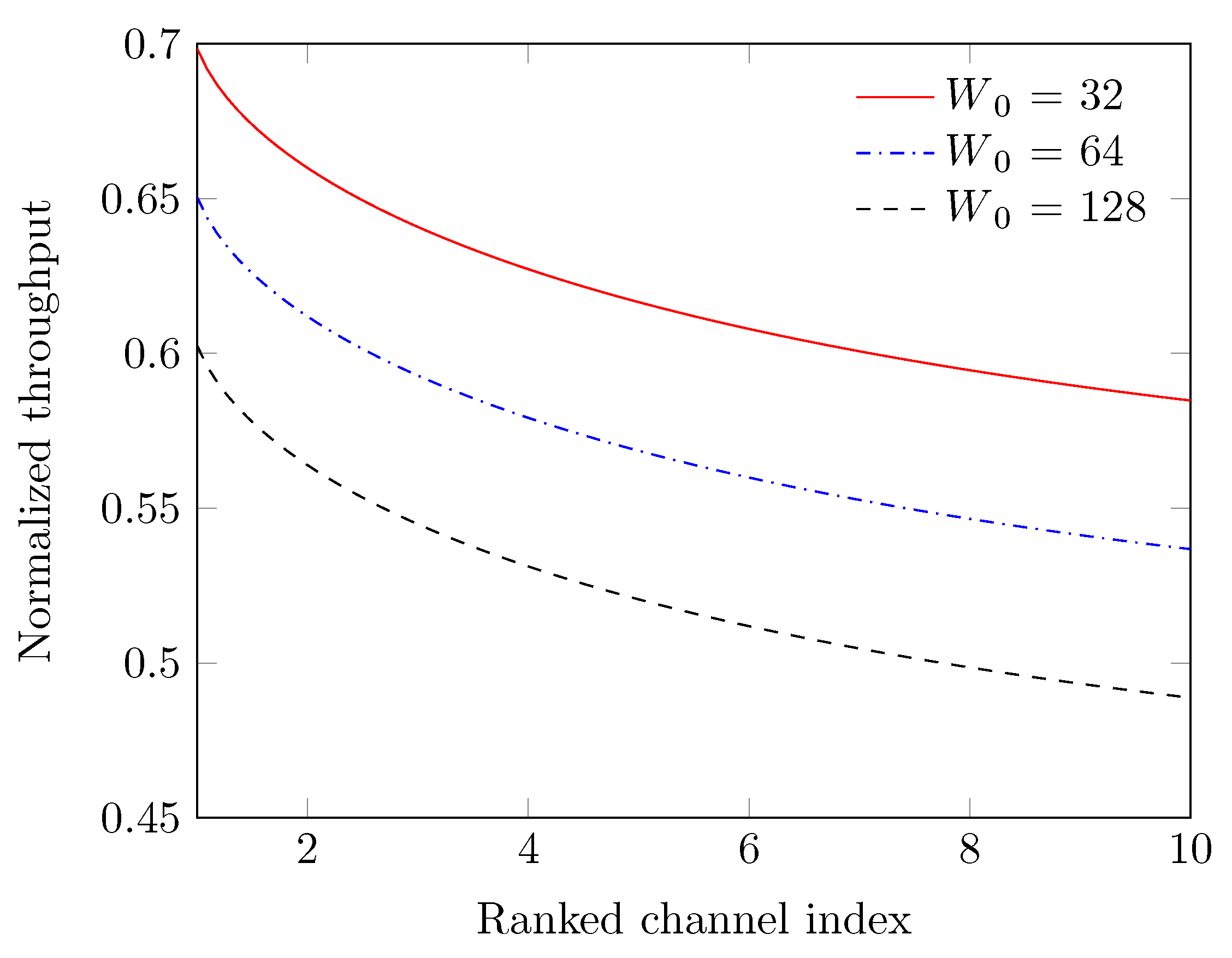
We provide the normalized throughput of the different ranked channels for various contention windows in
Figure 9, where we consider the ranked channel
in highest to lowest order at index
, respectively. We observe that normalized throughput decreases with the increase in the ranked channel index. This is because of the fact that channels are ranked based on the SUs’ traffic, PUs’ return rate, and channel quality in terms of SNR. Therefore, the highest ranked channel produces better throughput due to less blocking rate, better quality, and limited collisions among SUs. However, the gaps between the curves of normalized throughput are attributed due to various sizes of the contention window
. When the
is large, the rendezvous-channel time is being wasted by the backoff slots, because backoff counter chosen by SUs on average becomes large for the default number of SUs. The system has then low normalized throughput. In addition, if the
is small, the backoff counter chosen by SUs on average is enough to avoid collisions among the fewer SUs. Then, the system has a high normalized throughput.
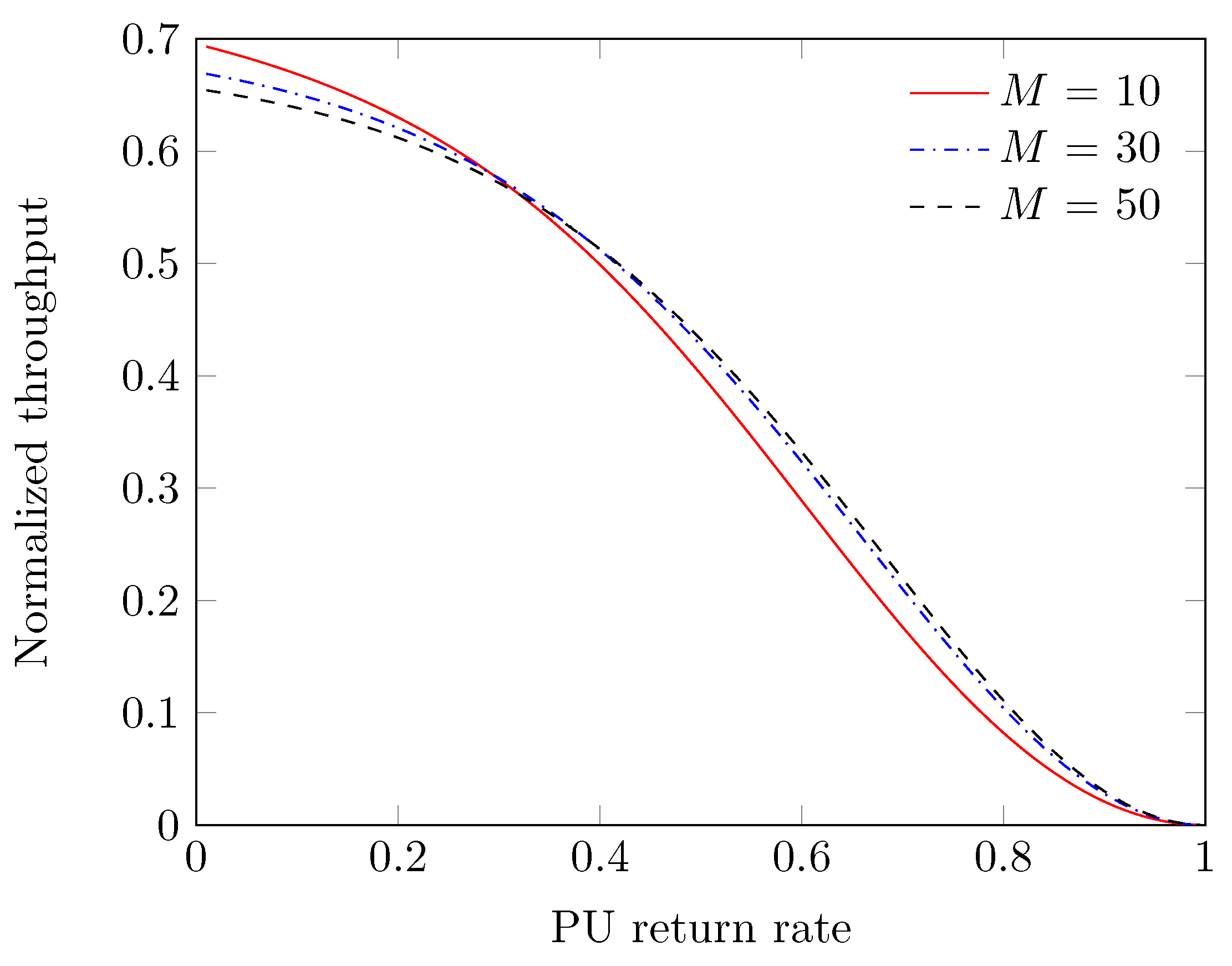
In
Figure 10, we show the effect of PU return rate over the system throughput for the various number of SUs. We see that the normalized throughput monotonically decreases with the increase in PU return rate since the rendezvous-channel access probability decreases. When the PU return rate is low, the achieved normalized throughput is better for fewer SUs
M due to fewer collisions. On contrary to this, if the PU return rate is high, the achieved normalized throughput is then better for the large
M. Since the large
M can produce more packets compared to the small
M. However, the overall throughput of the system decreases due to a large number of SUs’ blocking at the transmitter and receiver.
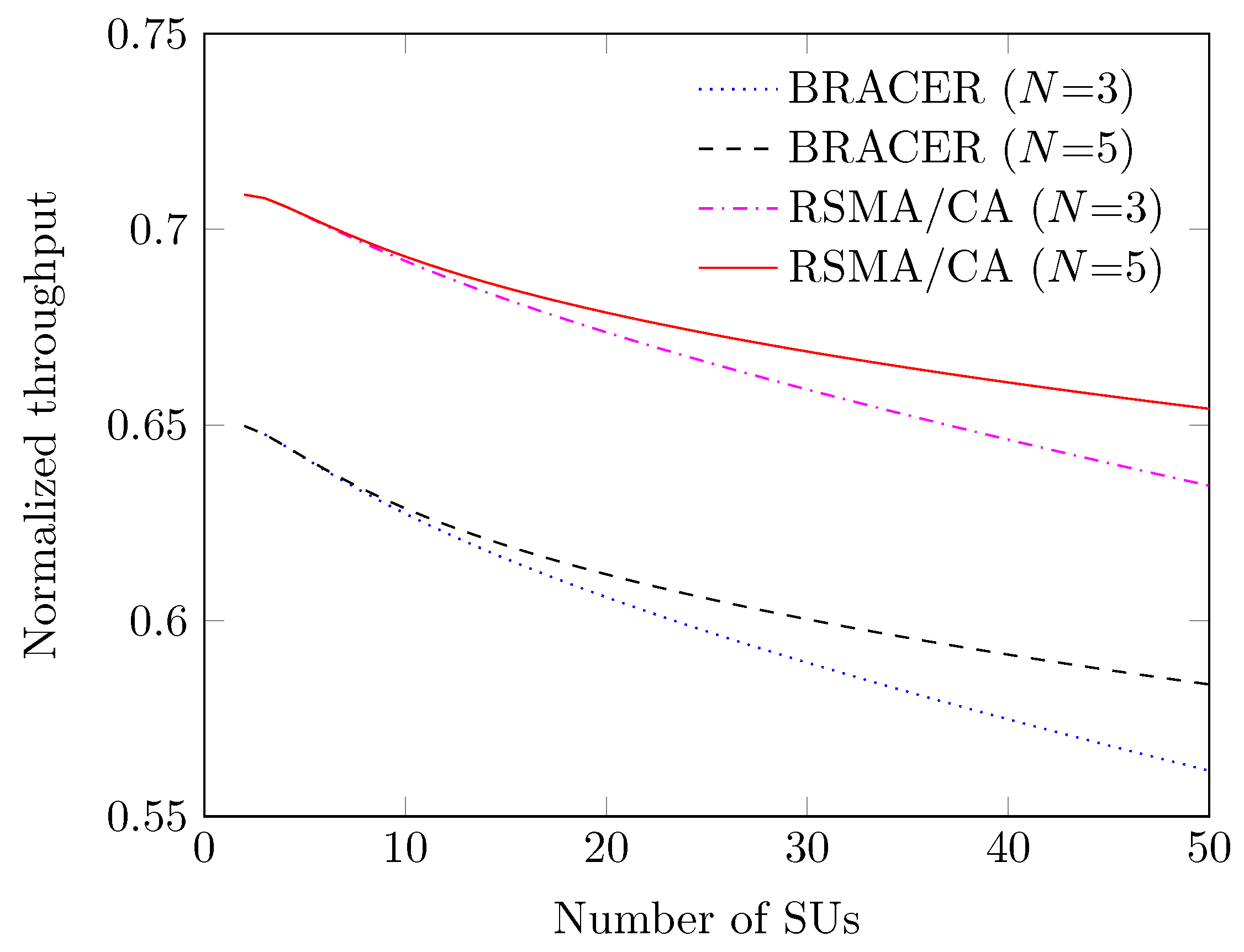
We investigate the throughput of our RSMA/CA protocol over the number of SUs and compared with that of BRACER under the system of interest in
Figure 11, where we consider the maximum backoff stage
N of 3 and 5, respectively. The throughput decreases as the number of SUs increases since the collision rate among SUs increases. We observe that the normalized throughput increases when
N is large even with more collisions because the backoff counter chosen is large, and it decreases otherwise. We also witness that our RSMA/CA protocol outperforms BRACER in terms of normalized throughput due to its efficient rendezvous and access mechanisms.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}