An Accurate Measurement Method for Azimuth Pointing of Spaceborne Synthetic Aperture Radar Antenna Beams Based on Ground Receiver

 , and
, and
Abstract
:1. Introduction
2. Methodology
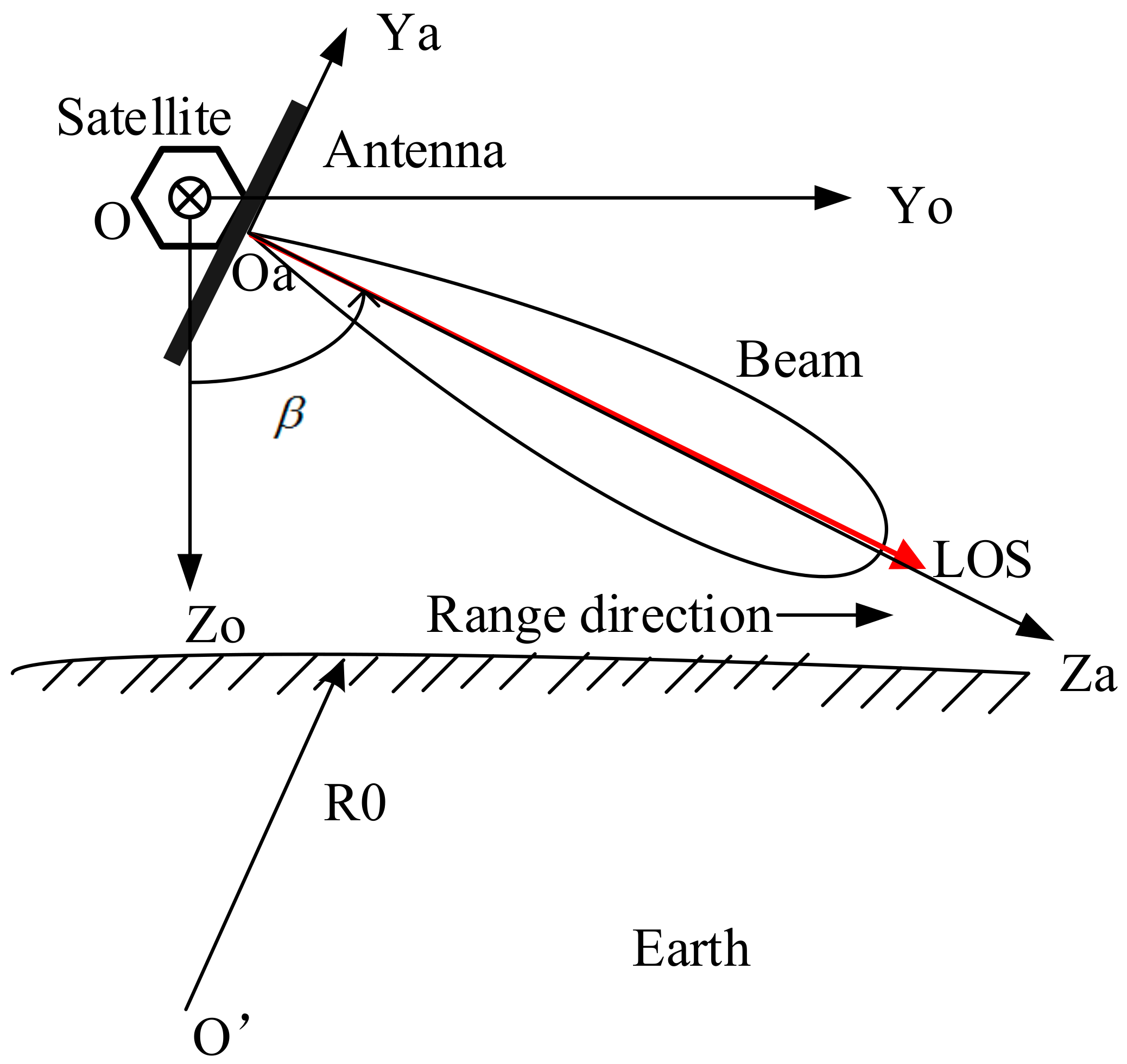
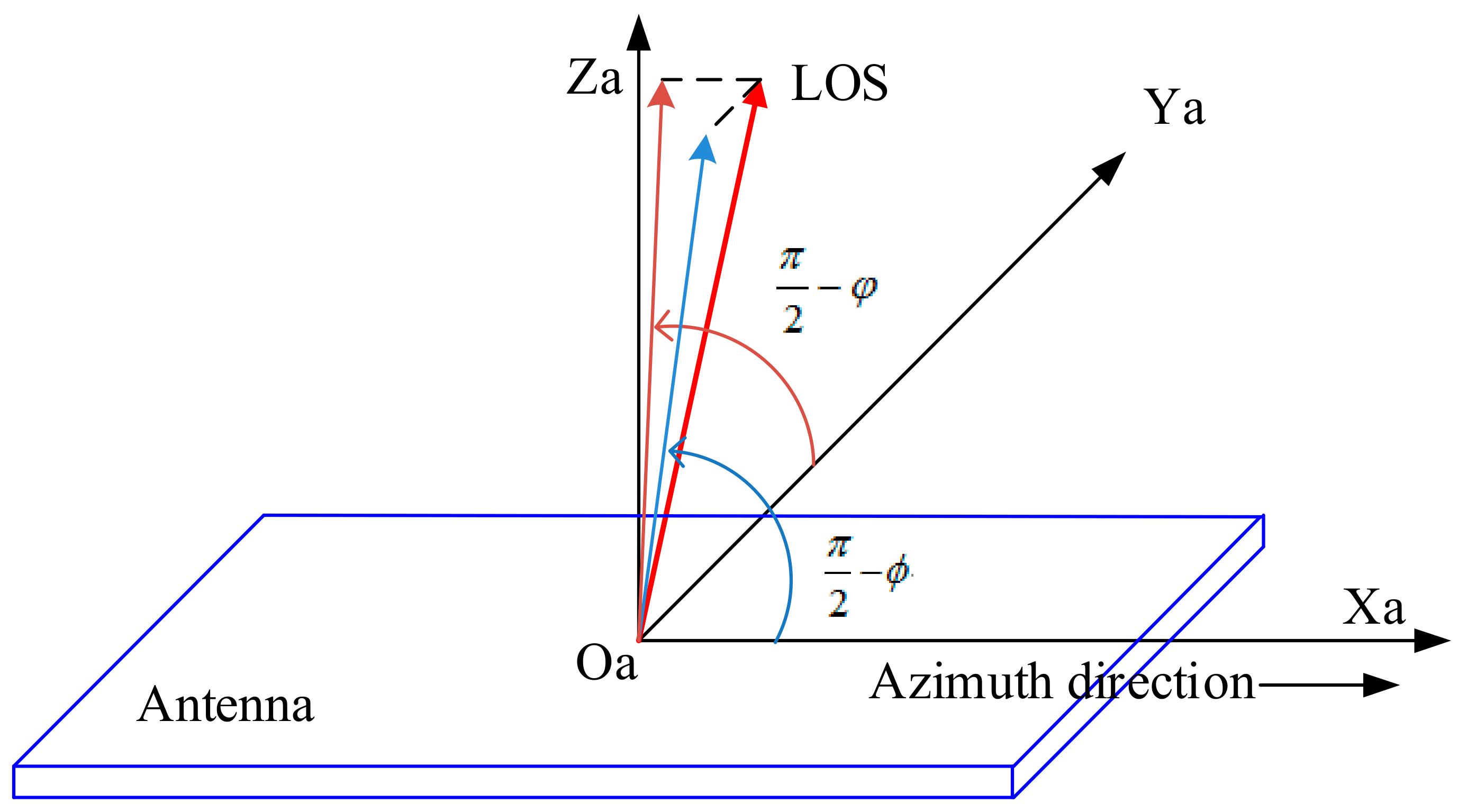
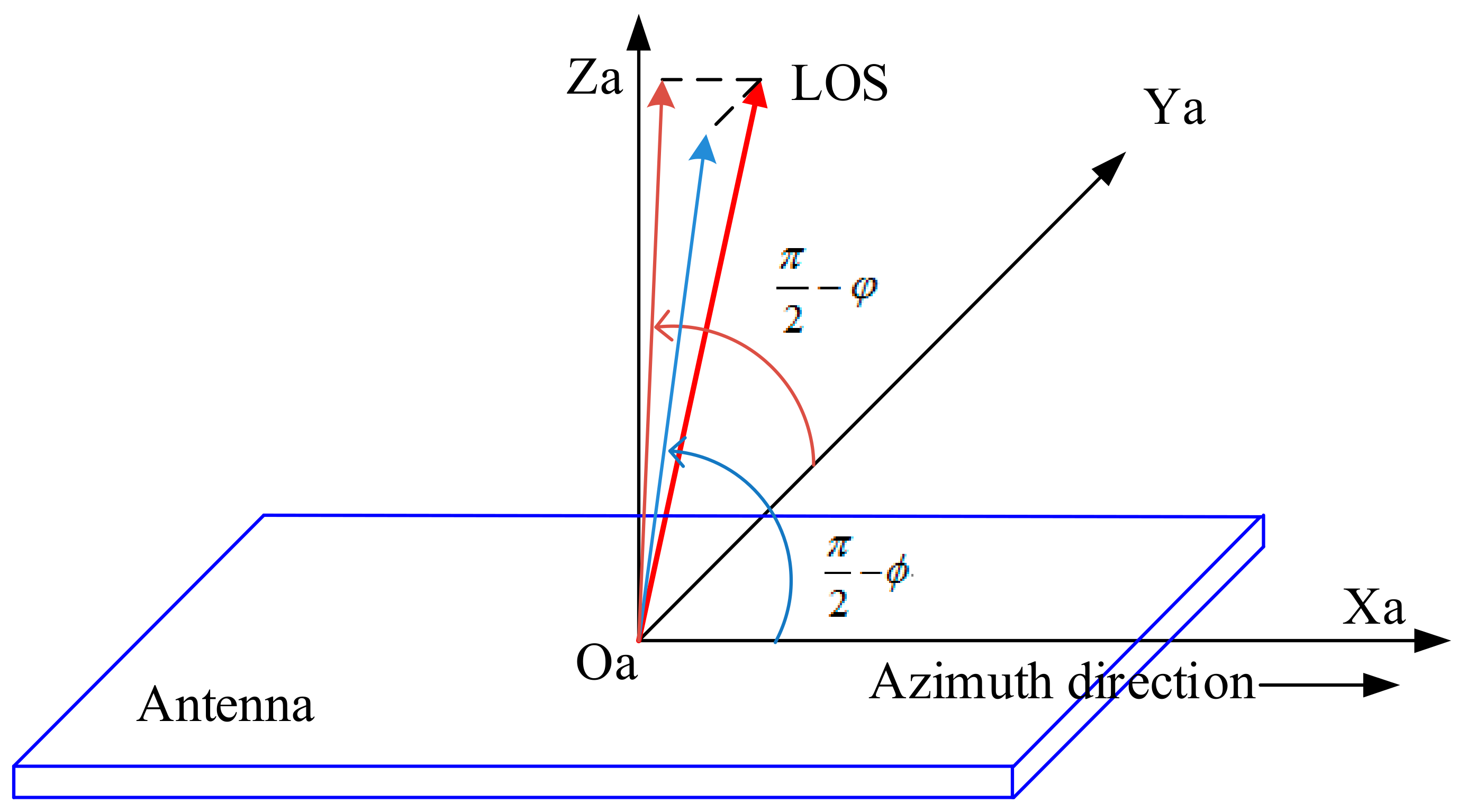
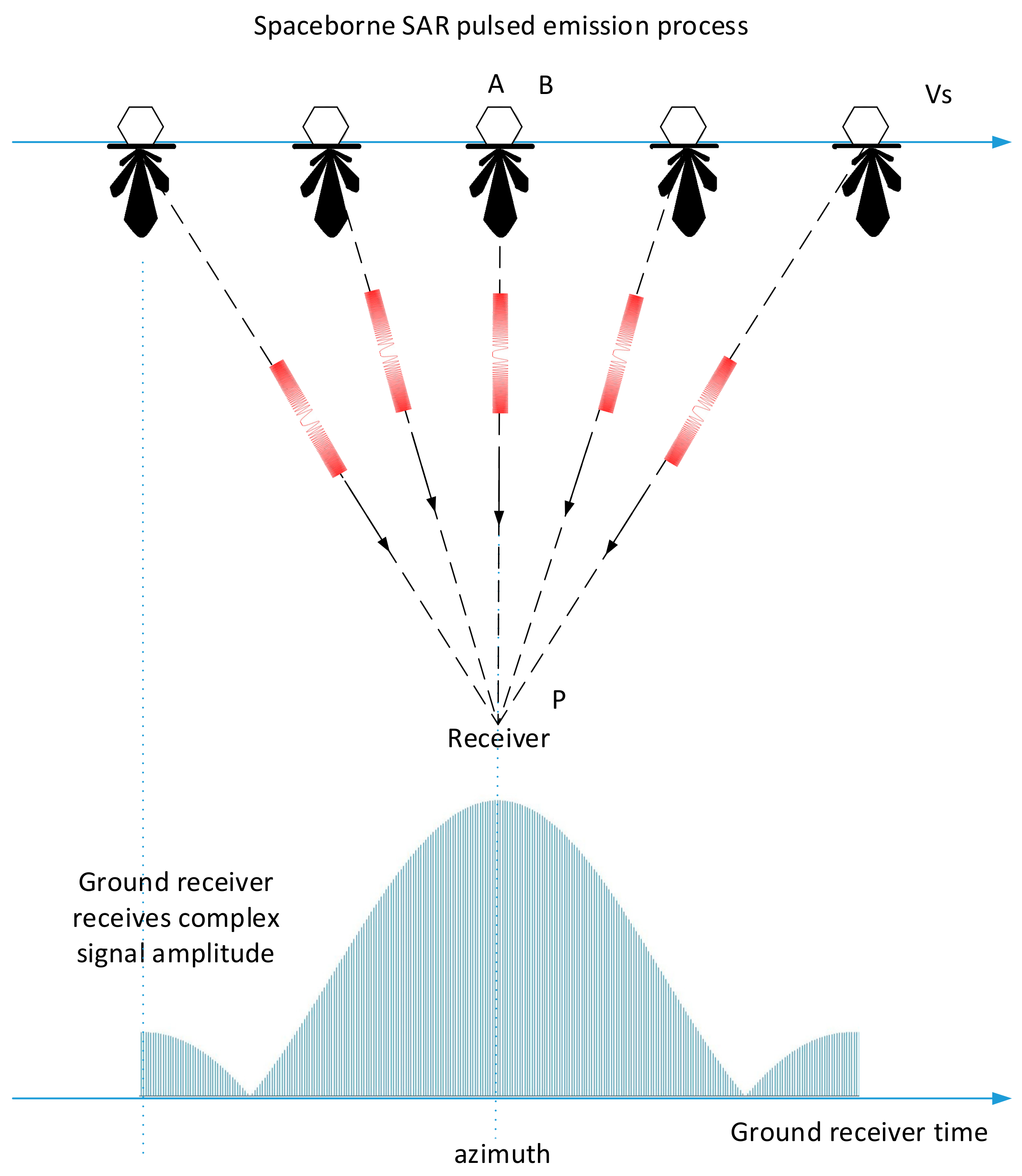
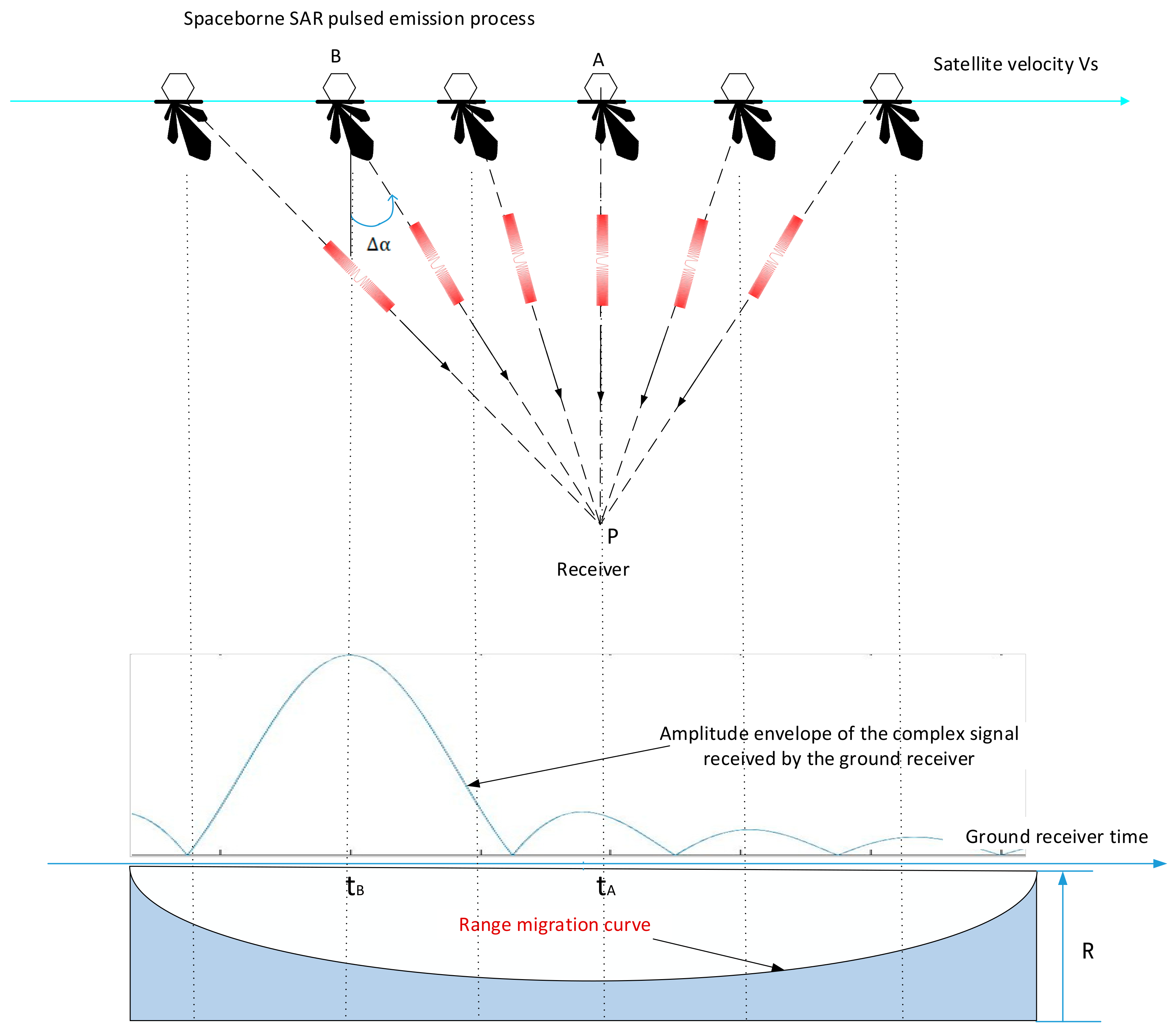
2.1. Knowledge and Definition
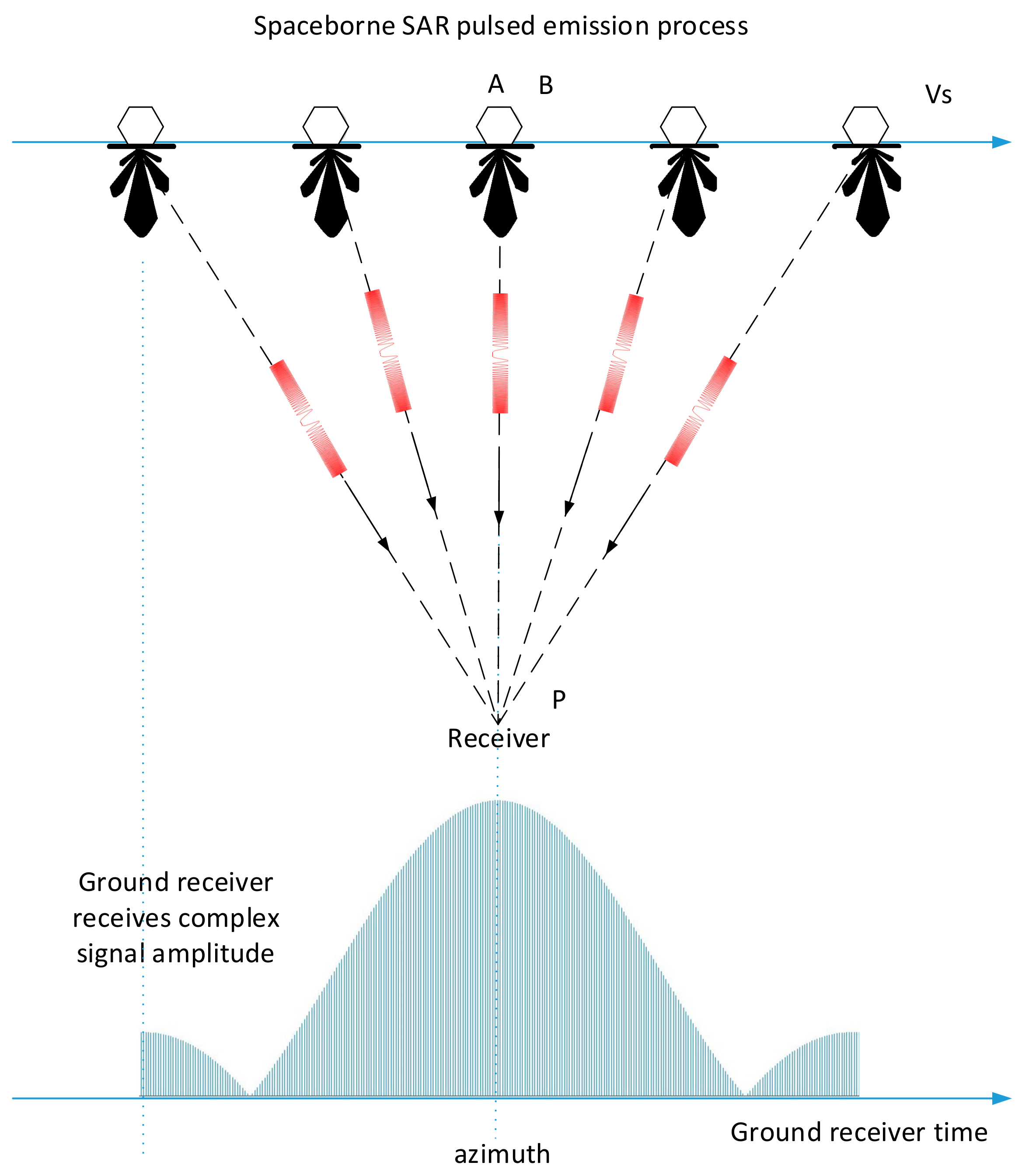
2.2. Measuring Principle
2.3. Extracting
2.4. Extracting
3. Data Processing Algorithm
3.1. Algorithm of Extracting
- (1)
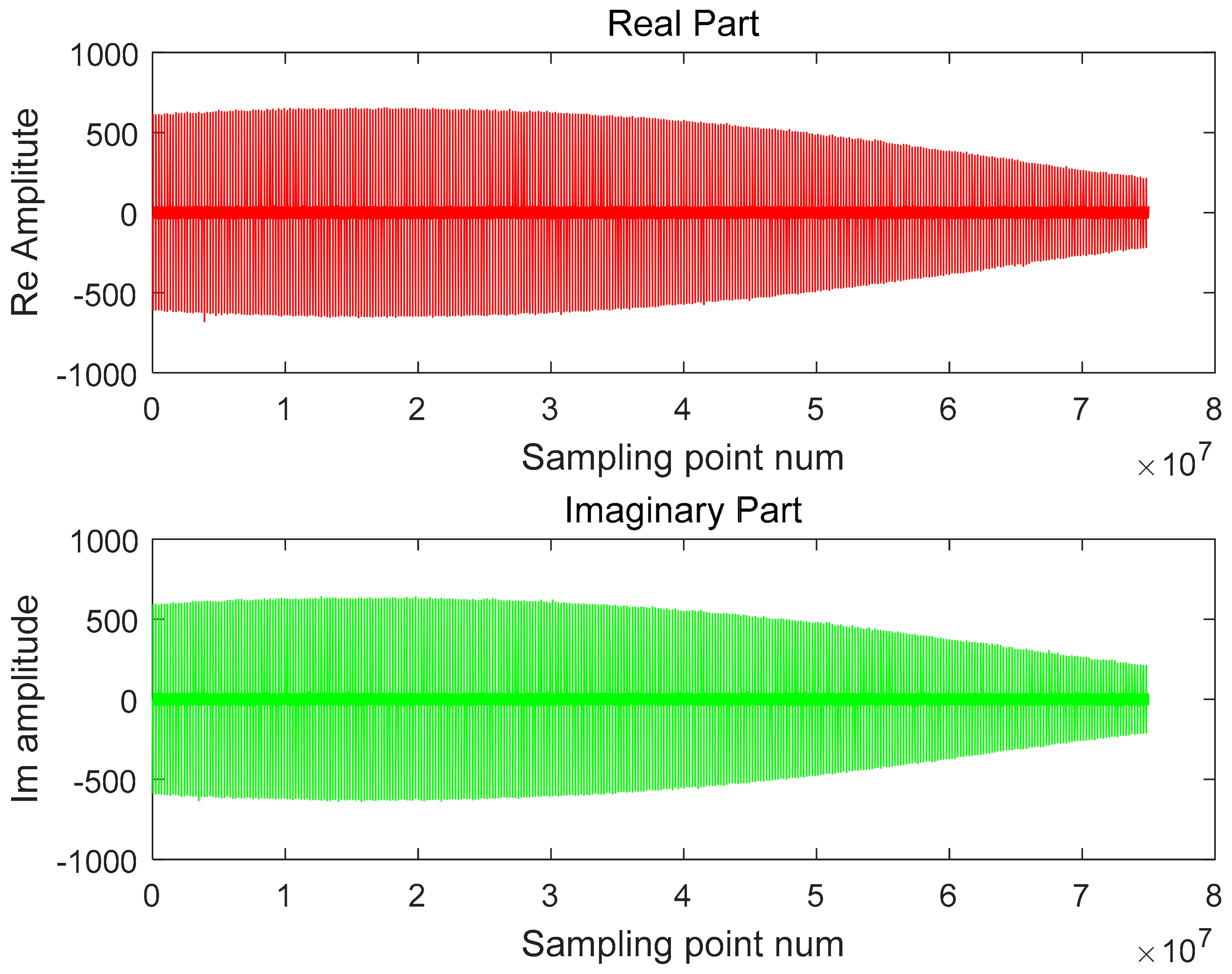
- Intercept the complex sampling data of the pulse signal received by the ground receiver according to the pulse repetition time (PRT), and remove the same amount of redundant noise data in each cycle;
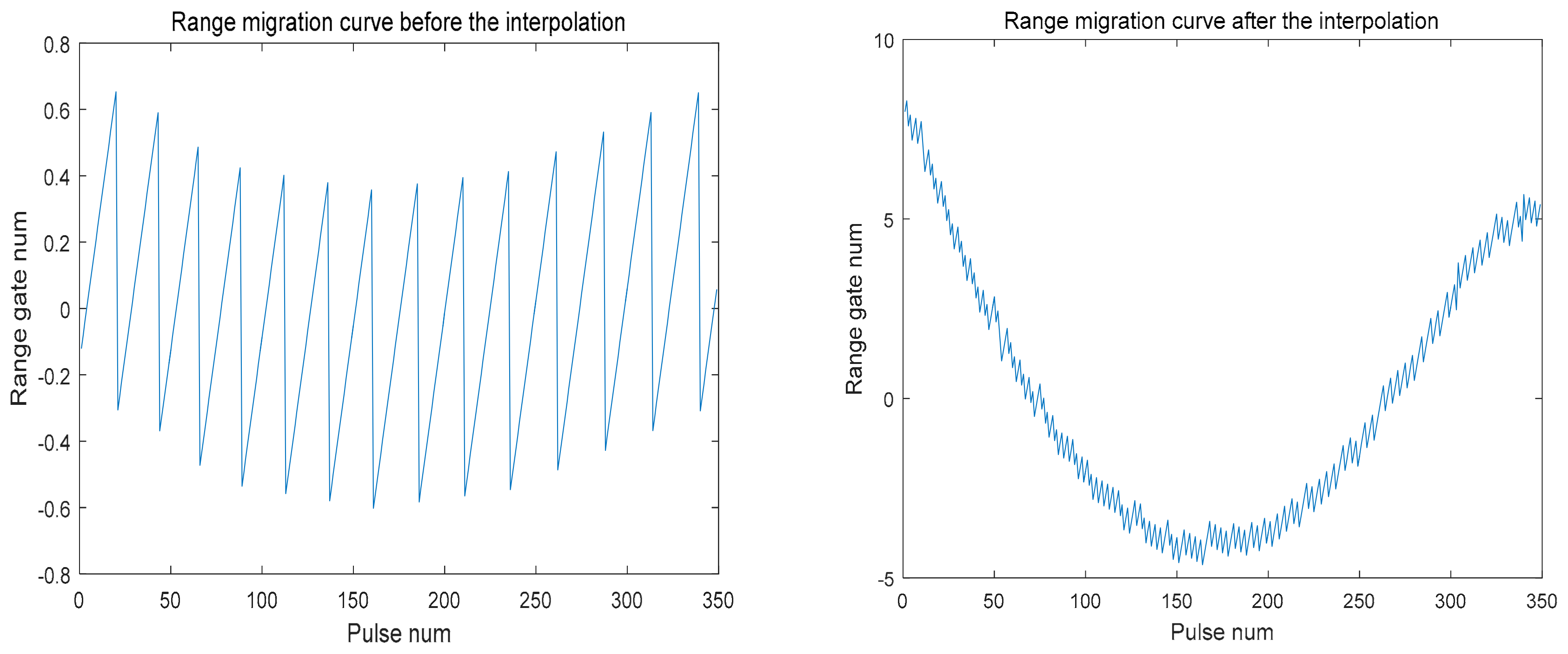
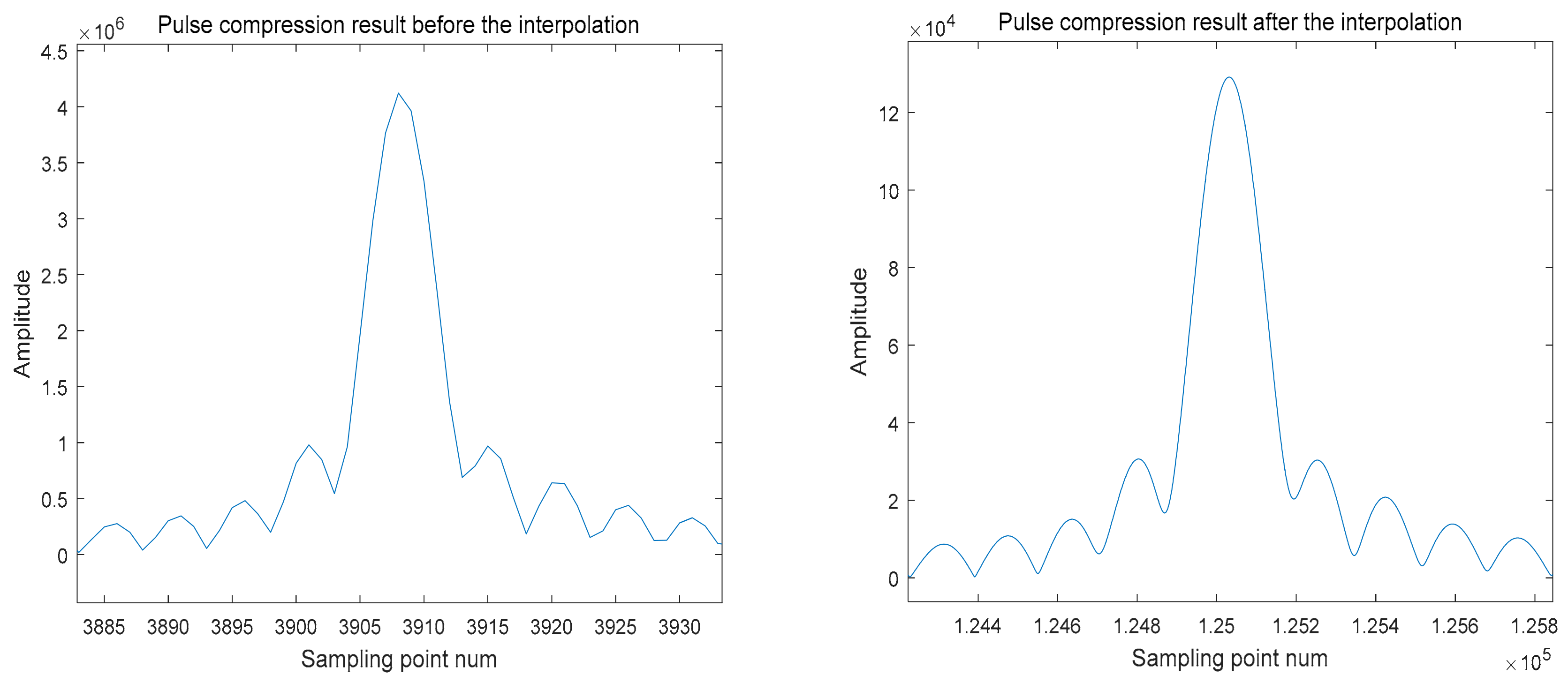
- (2)
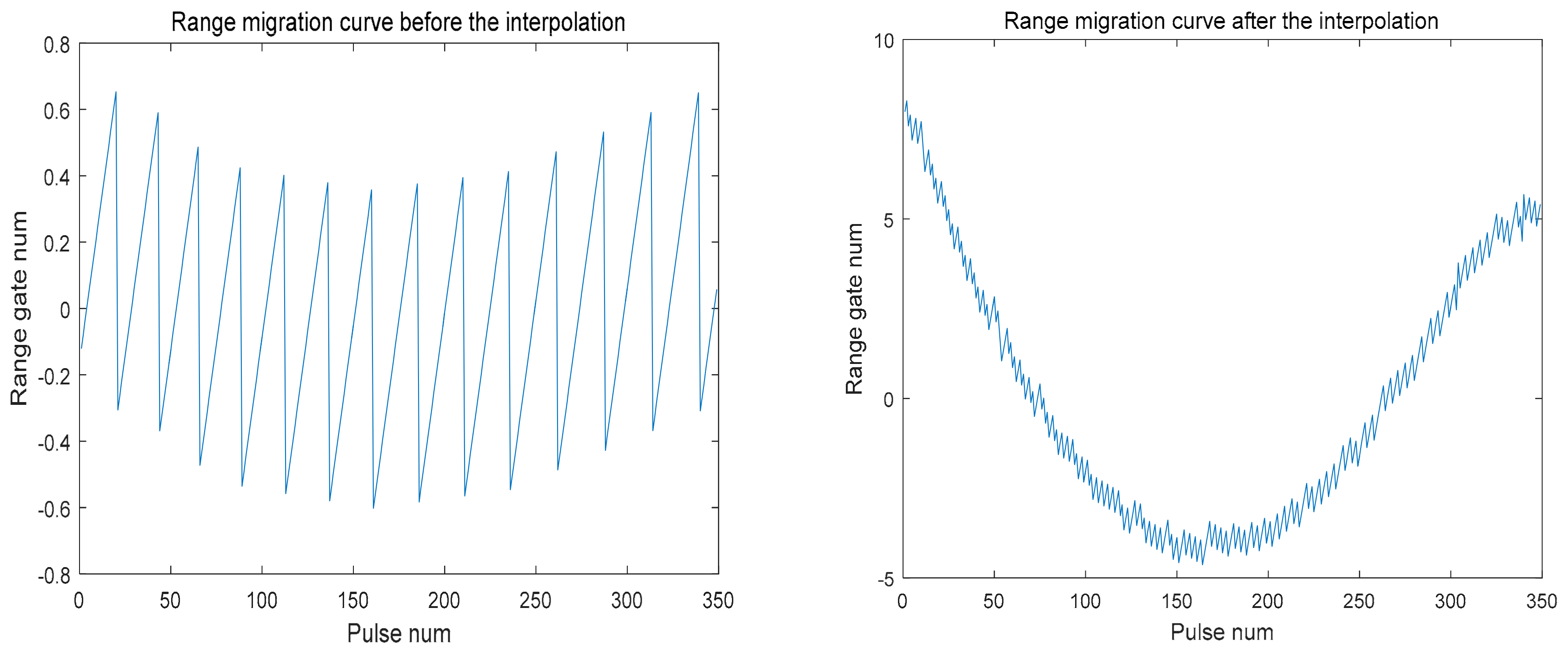
- Perform interpolation to obtain some continuously changing pulse compression signals;
- (3)
- Calculate the position of each pulse peak in range direction to get the range migration curve;
- (4)
- According to the range migration curve, calculate the azimuth time corresponding to the closest pulse peak from the satellite to the ground receiver, which is .
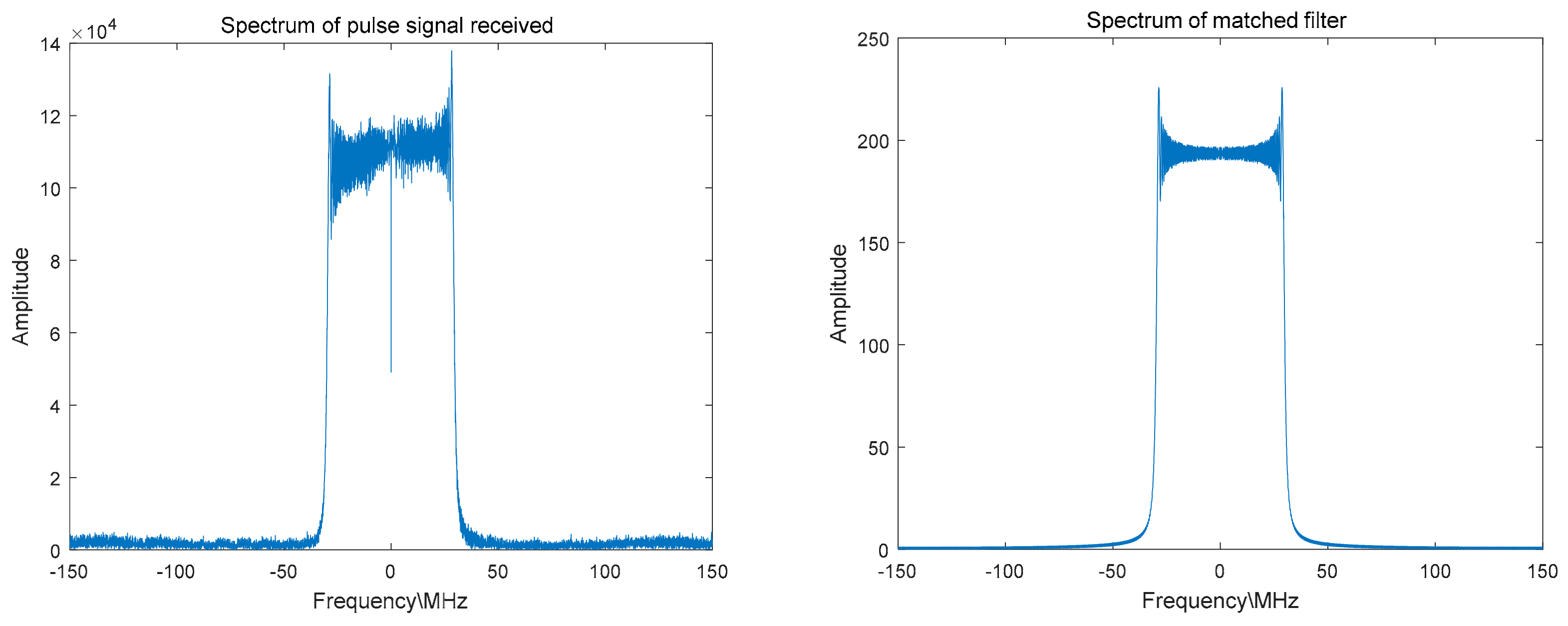
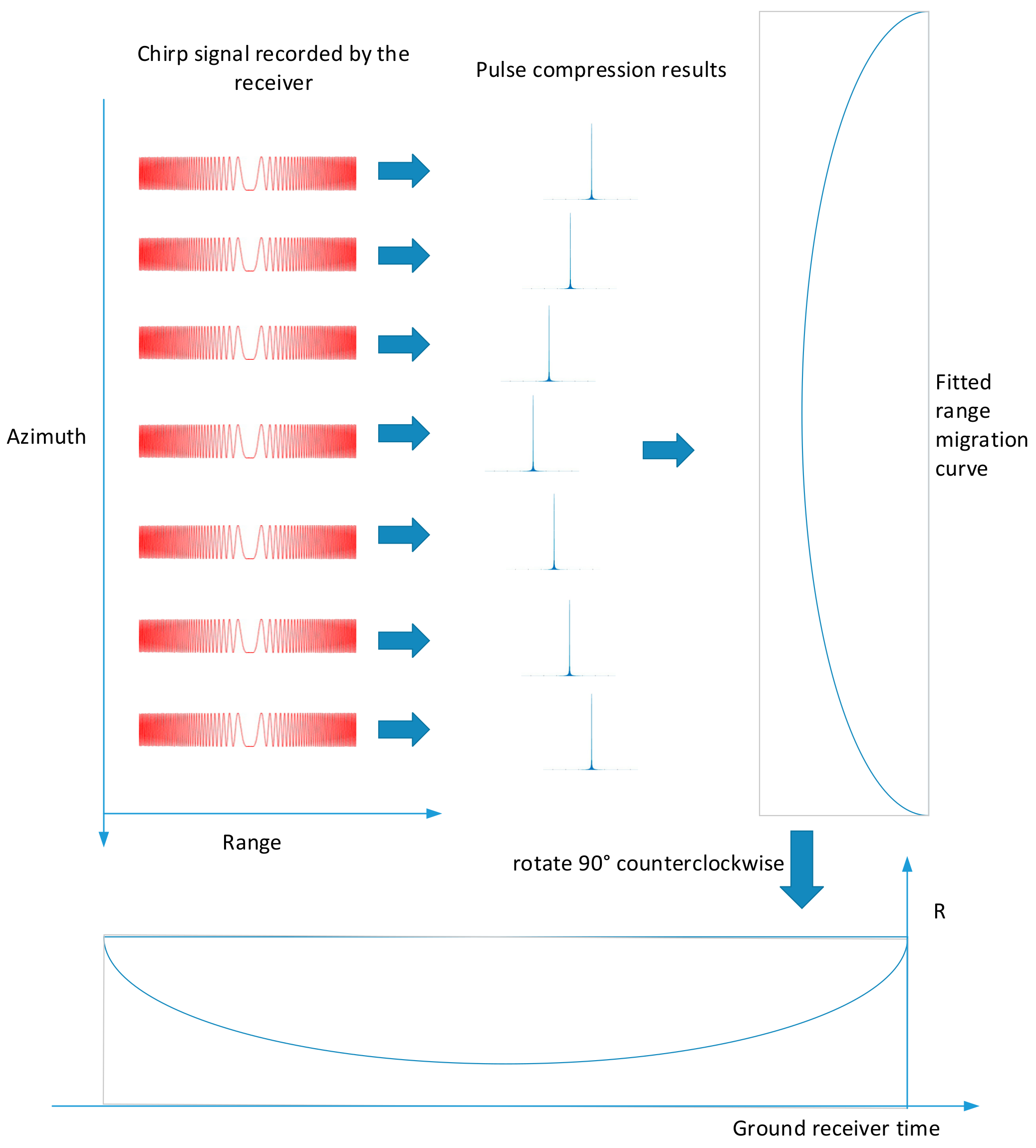
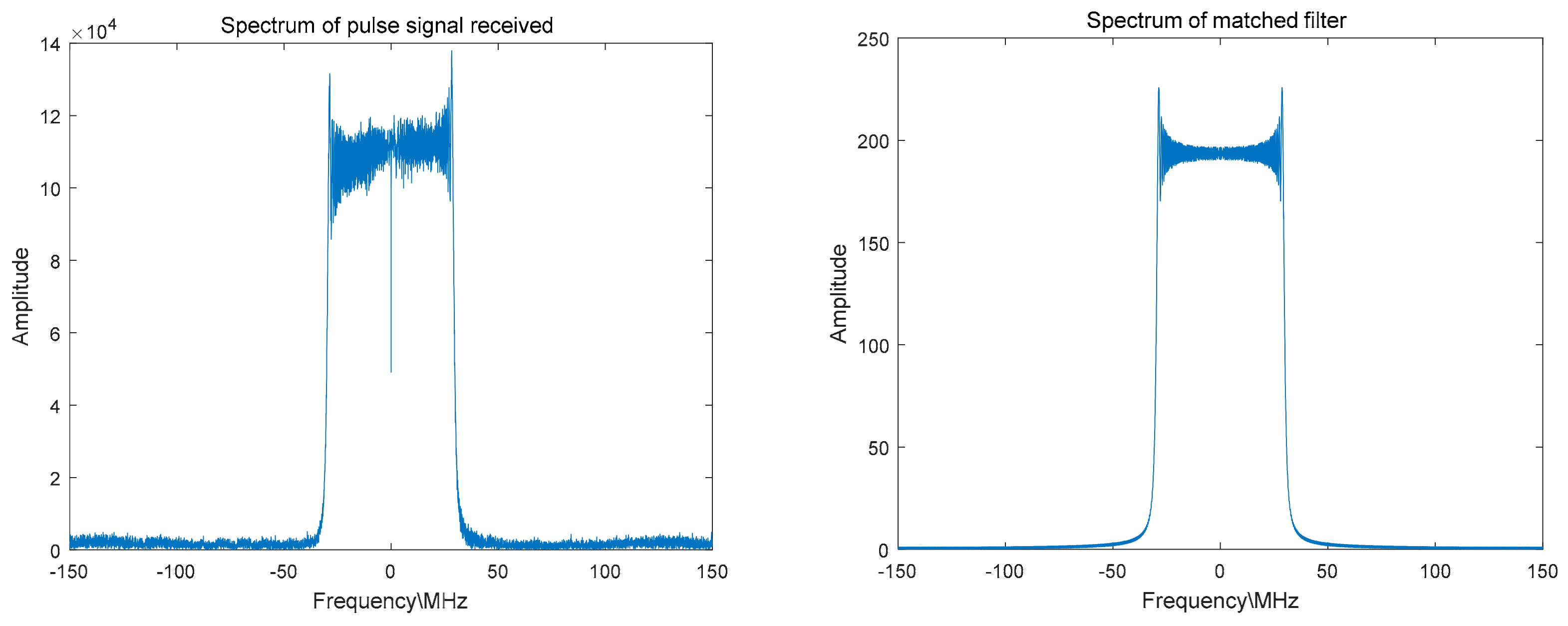
3.1.1. Pulse Compression
- (1)
- Fourier transform the compressed signal to the frequency domain;
- (2)
- Perform zero-added (power of 2) in the noise region outside the signal bandwidth;
- (3)
- Perform inverse Fourier transform to complete the time-domain interpolation so that the time-domain signal is smooth and continuous.
3.1.3. Range Migration Curve Extraction
- (1)
- Find the maximum value of each pulse.
- (2)
- Record the corresponding azimuth and range position.
- (3)
- Obtain the range migration curve.
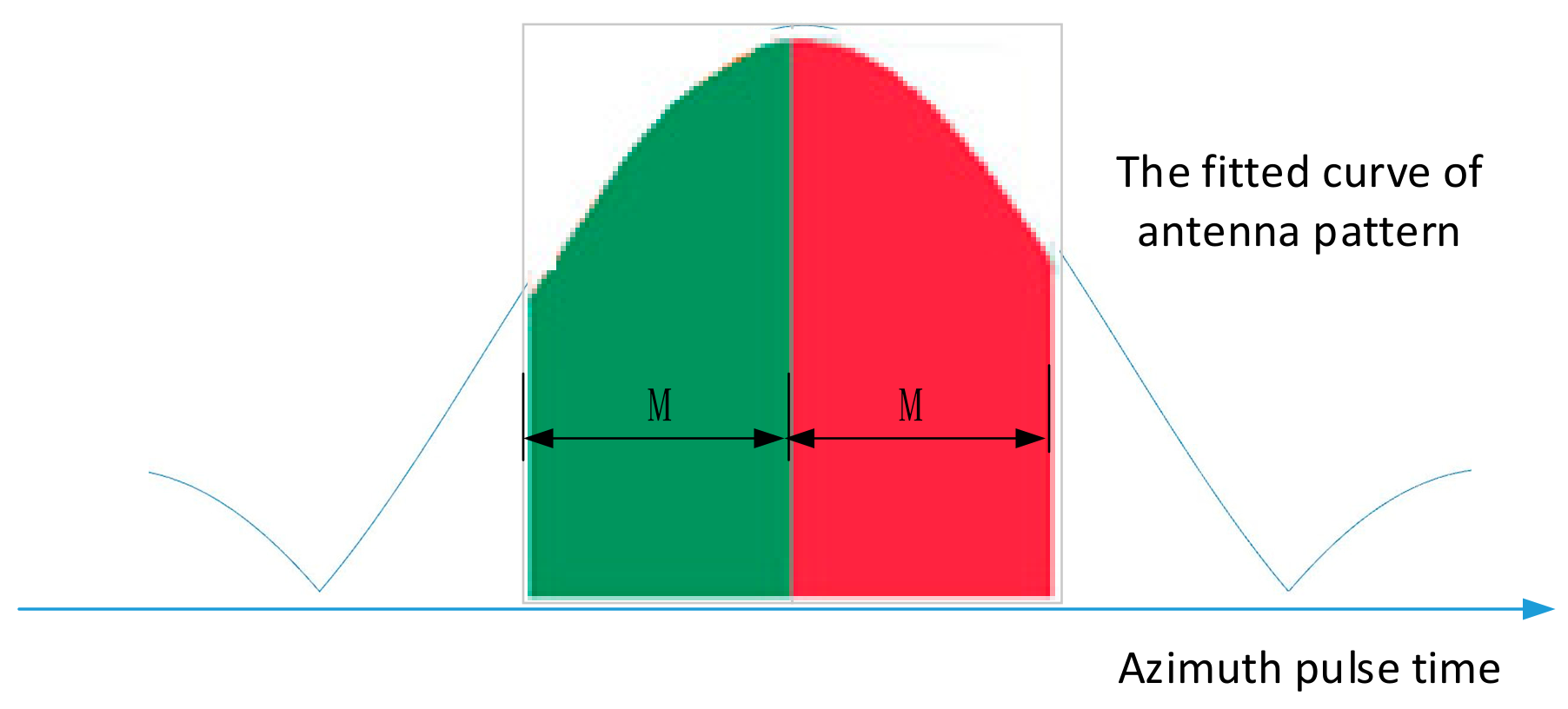
3.1.4. Extracting
- (1)
- Find N points far away from the minimum of the curve at one side, and note the abscissa (Pulse number position) as well as the ordinate values (Interpolated range cell position).
- (2)
- Find other N points at the other side, whose ordinates are equal to the first N points, and note their abscissas.
- (3)
- Obtain the satellite’s ceiling time by calculating the mean value of the abscissas of the 2N points.
3.2. Algorithm of Extracting
4. Measurement Accuracy Analysis
5. GaoFen-3 Test Data Processing Results
5.1. Test Information and Data
- PRF = 2792.176270 Hz;
- eqvPRF = 1396.088135 Hz;
- centerLookAngle = 29.360000°;
- azimuth emission pattern −3 dB beamwidth = 0.188°;
- Fs = 66.66667 MHz;
- Bandwidth = 60 MHz;
- pulsewidth = 24.99 us;
- satVelocity = 7567.397210 m/s;
- groundVelocity = 6738.85526 m/s;
- averageAltitude = 1228.350098 m;
- nearRange = 874,626.096672 m.
- Latitude = 39.2411° N;
- Longitude = 107.4662° E;
- Altitude = 1320.60 m.
- receiving pattern −3 dB beamwidth = 13.6°;
- receiving pattern −0.5 dB beamwidth = 5.6°.
- samplingrate = 300 MHz;
- RangeofSat2Receiver = 882,300.41 m.
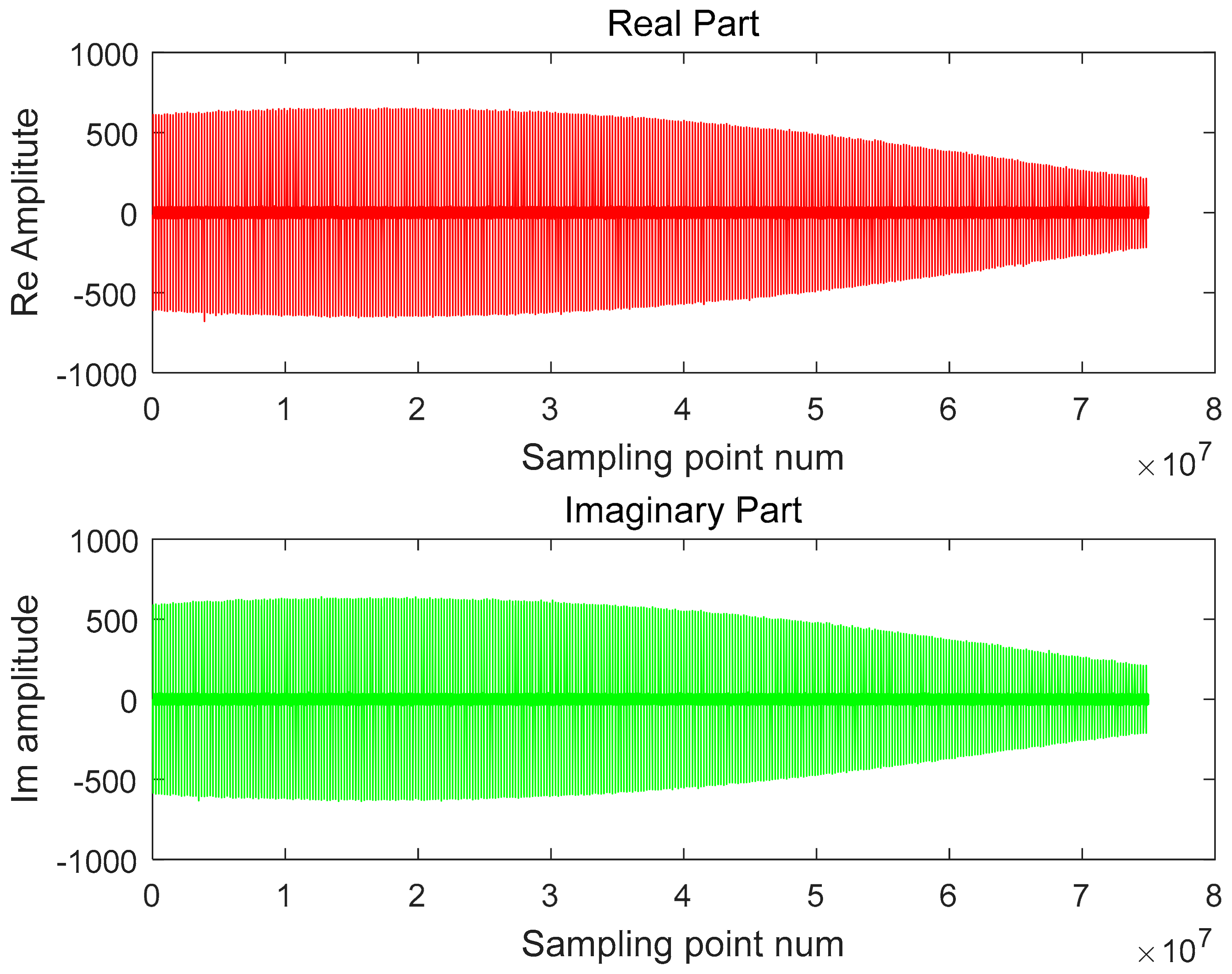
5.2. Test Data Processing and Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OXbYbZb | Xb | Yb | Zb | |
|---|---|---|---|---|
| OaXaYaZa | ||||
| Xa | ||||
| Ya | ||||
| Za | ||||
References
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Buckreuss, S.; Werninghaus, R.; Pitz, W. The German satellite mission TerraSAR-X. IEEE Aerosp. Electron. Syst. Mag. 2008, 24, 4–9. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Brunfeldt, D.R.; Held, D.N. External calibration of SIR-B imagery with area extended and point targets. IEEE Trans. Geosci. Remote Sens. 1986, 24, 453–461. [Google Scholar] [CrossRef]
- Seifert, P.; Lentz, H.; Zink, M. Ground-based measurements of inflight antenna patterns for imaging radar systems. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1131–1136. [Google Scholar] [CrossRef]
- Seifert, P.; Zink, M.; Lentz, H. ERS-1 preliminary antenna elevation pattern measured by ground receivers. In Proceedings of the First ERS-1 Symposium—Space at the Service of our Environment, Cannes, France, 4–6 November 1992. [Google Scholar]
- Thompson, A.A.; Racine, D.; Luscombe, A.P. RADARSAT-2 antenna calibration using Ground Receivers/Transmitters. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2002 (IGARSS’02), Toronto, ON, Canada, 24–28 June 2002; Volume 3, pp. 1465–1467. [Google Scholar]
- Shen, Y.; Klein, J.D.; Freeman, A. Tone generators in SAR applications. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 1990 (IGARSS’90), College Park, MD, USA, 20–24 May 1990; p. 1121. [Google Scholar]
- Freeman, A.; Alves, M. SIR-C data quality and calibration results. IEEE Trans. Geosci. Remote Sens. 1995, 33, 848–857. [Google Scholar] [CrossRef]
- Fang, Y.; Moore, R.K. Inflight vertical antenna patterns for SIR-C from amazon rain forest observations. Remote Sens. Environ. 1997, 59, 407–414. [Google Scholar] [CrossRef]
- Moore, R.K.; Rediawan, H. Further analysis of SIR-C antenna patterns for radiometric corrections: Use of new calibration areas. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 1999 (IGARSS’99), Seattle, WA, USA, 28 June–2 July 1999; Volume 1, pp. 437–439. [Google Scholar]
- Lukowski, T.I.; Hawkins, R.K.; Cloutier, C. RADARSAT elevation antenna pattern determination. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 1997 (IGARSS’97), Singapore, 3–8 August 1997; Volume 3, pp. 1382–1384. [Google Scholar]
- Shimada, M.; Freeman, A.A. Technique for measurement of spaceborne SAR antenna patterns using distributed targets. IEEE Trans. Geosci. Remote Sens. 1995, 33, 100–114. [Google Scholar] [CrossRef]
- Hawkins, K.R. Determination of antenna elevation pattern for airborne SAR using the rough target approach. IEEE Trans. Geosci. Remote Sens. 1990, 28, 896–905. [Google Scholar] [CrossRef]
- Zink, M.; Rosich, B. Antenna elevation pattern estimation from rain forest acquisitions. Glob. Chang. Biol. 2002, 19, 1173–1187. [Google Scholar]
- Schwerdt, M.; Hounam, D.; Alvarez-Pèrez, J.L. The calibration concept of TerraSAR-X: A multiple-mode, highresolution SAR. Can. J. Remote Sens. 2005, 30, 30–36. [Google Scholar] [CrossRef]
- Schwerdt, M.; Bräutigam, B.; Bachmann, M. Final results of the efficient TerraSAR-X calibration method. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Bachmann, M.; Schwerdt, M.; Bräutigam, B. Accurate antenna pattern modeling for phased array antennas in SAR applications—Demonstration on TerraSAR-X. Int. J. Antennas Propag. 2009, 2009, 492505. [Google Scholar] [CrossRef]
- Montenbruck, O.; Ramos-Bosch, P. Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut. 2008, 12, 187–198. [Google Scholar] [CrossRef]
- Montenbruck, O.; Swatschina, P.; Markgraf, M. Precision spacecraft navigation using a low-cost GPS receiver. GPS Solut. 2012, 16, 519–529. [Google Scholar] [CrossRef]
- Choi, E.J.; Yoon, J.C.; Lee, B.S.; Park, S.Y.; Choi, K.H. Onboard orbit determination using GPS observations based on the unscented Kalman filter. Adv. Space Res. 2010, 46, 1440–1450. [Google Scholar] [CrossRef]
- Schwerdt, M.; Brautigam, B.; Bachmann, M. Final TerraSAR-X calibration results based on novel efficient methods. IEEE Trans. Geosci. Remote Sens. 2010, 48, 677–689. [Google Scholar] [CrossRef]
- Schwerdt, M.; Gonzalez, J.H.; Bachmann, M. In-orbit calibration of the TanDEM-X system. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, USA, 24–29 July 2011; pp. 2420–2423. [Google Scholar]
- Huang, L.; Qiu, X.; Hu, D.; Ding, C. Focusing of medium-earth-orbit SAR with advanced nonlinear chirp scaling algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 500–508. [Google Scholar] [CrossRef]
- Shang, M.; Han, B.; Ding, C. A High-Resolution SAR Focusing Experiment Based on GF-3 Staring Data. Sensors 2018, 18, 943. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, W.; Jia, Z.; Kang, L.; Hong, J.; Lei, B.; Zhang, Q.; Chen, Q. An Accurate Measurement Method for Azimuth Pointing of Spaceborne Synthetic Aperture Radar Antenna Beams Based on Ground Receiver. Sensors 2018, 18, 2626. https://doi.org/10.3390/s18082626
Liang W, Jia Z, Kang L, Hong J, Lei B, Zhang Q, Chen Q. An Accurate Measurement Method for Azimuth Pointing of Spaceborne Synthetic Aperture Radar Antenna Beams Based on Ground Receiver. Sensors. 2018; 18(8):2626. https://doi.org/10.3390/s18082626
Chicago/Turabian StyleLiang, Weibin, Zengzeng Jia, Lihong Kang, Jun Hong, Bin Lei, Qingjun Zhang, and Qi Chen. 2018. "An Accurate Measurement Method for Azimuth Pointing of Spaceborne Synthetic Aperture Radar Antenna Beams Based on Ground Receiver" Sensors 18, no. 8: 2626. https://doi.org/10.3390/s18082626