Multiparametric Monitoring in Equatorian Tomato Greenhouses (III): Environmental Measurement Dynamics

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Related Work
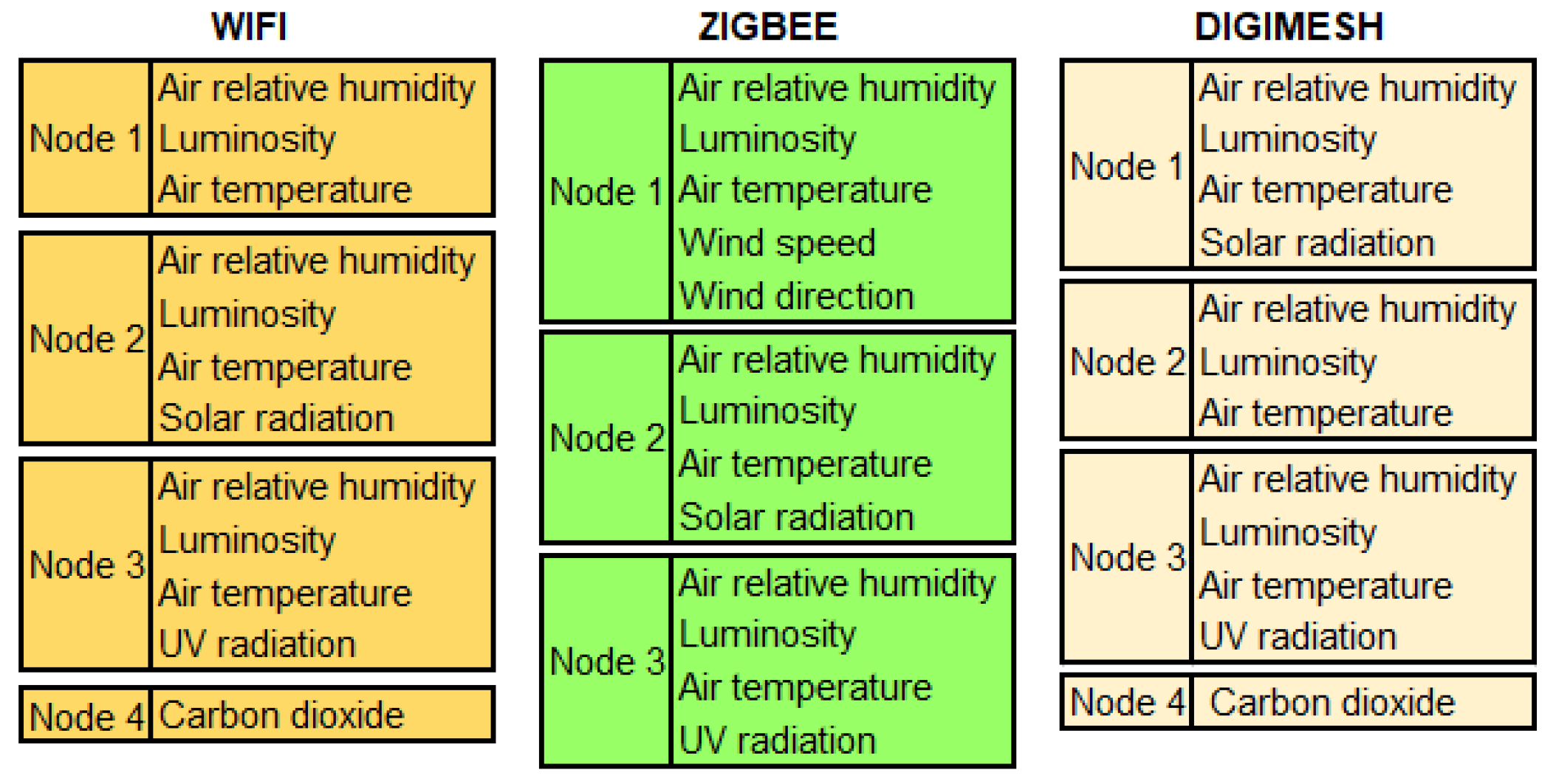
3. Summary of the Proposed System for Tomato Greenhouse Monitoring
4. Statistical Analysis of Environmental Measurement Dynamics
5. Experiments and Results
5.1. Methodology Description
5.2. Rhythmometric Model Adjustment
5.3. Variable Benchmarking Among Sensor Nodes and Networks
6. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Mathematical Notation and Detailed Equations
Appendix B. Detailed Rhythmometric Model Adjustment for CO2 Measurements





References
- FAOSTAT. Food and Agriculture Organization of the United Nations Statistics Division. Available online: http://www.fao.org/faostat/en (accessed on 20 March 2018).
- Roberts, L. 9 Billion? Science 2011, 333, 540–543. [Google Scholar] [CrossRef] [PubMed]
- Tilman, D.; Balzer, C.; Hill, J.; Befort, B.L. Global food demand and the sustainable intensification of agriculture. Proc. Natl. Acad. Sci. USA 2011, 108, 20260–20264. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sposito, G. Green water and global food security. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Gregory, P.J.; George, T.S. Feeding nine billion: The challenge to sustainable crop production. J. Exp. Bot. 2011, 62, 5233–5239. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, P.; Singh, R. Agricultural land allocation for crop planning in a canal command area using fuzzy multiobjective goal programming. J. Irrig. Drain. Eng. 2017, 143, 04017007. [Google Scholar] [CrossRef]
- Chen, Y.; Chanet, J.P.; Hou, K.M.; Shi, H.; De Sousa, G. A scalable context-aware objective function (SCAOF) of routing protocol for agricultural low-power and lossy networks (RPAL). Sensors 2015, 15, 19507–19540. [Google Scholar] [CrossRef] [PubMed]
- Sabzi, S.; Abbaspour-Gilandeh, Y.; García-Mateos, G. A fast and accurate expert system for weed identification in potato crops using metaheuristic algorithms. Comput. Ind. 2018, 98, 80–89. [Google Scholar] [CrossRef]
- Lu, H.; Tang, L.; Whitham, S.A.; Mei, Y. A Robotic Platform for Corn Seedling Morphological Traits Characterization. Sensors 2017, 17, 2082. [Google Scholar] [CrossRef] [PubMed]
- Ramesh, S.; Rajaram, B. Iot based crop disease identification system using optimization techniques. ARPN J. Eng. Appl. Sci. 2018, 13, 1392–1395. [Google Scholar]
- Llop, J.; Gil, E.; Llorens, J.; Miranda-Fuentes, A.; Gallart, M. Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops. Sensors 2016, 16, 1435. [Google Scholar] [CrossRef] [PubMed]
- Erazo-Rodas, M.; Sandoval-Moreno, M.; Muñoz-Romero, S.; Rivas, D.; Huerta, M.; Naranjo-Hidalgo, C.; Rojo-Álvarez, J.L. Multiparametric Monitoring in Equatorian Tomato Greenhouse (I): Wireless Sensor Network Benchmarking. Sensors 2018, 18, 2555. [Google Scholar]
- Erazo-Rodas, M.; Sandoval-Moreno, M.; Muñoz-Romero, S.; Rivas, D.; Huerta, M.; Rojo-Álvarez, J.L. Multiparametric Monitoring in Equatorian Tomato Greenhouse (II): Energy Consumption Dynamics. Sensors 2018, 18, 2556. [Google Scholar]
- Trejo-Perea, M.; Herrera-Ruiz, G.; Rios-Moreno, J.; Miranda, R.C.; Rivasaraiza, E. Greenhouse energy consumption prediction using neural networks models. Training 2009, 1, 2. [Google Scholar]
- Xu, H.; Zhang, H.; Shen, Y.; Ren, S. Environment monitoring system for flowers in greenhouse using low-power transmission. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2013, 29, 237–244. [Google Scholar]
- El Ghoumari, M.; Megias, D.; Montero, J.; Serrano, J. Model predictive control of greenhouse climatic processes using on-line linearisation. In Proceedings of the 2001 European Control Conference (ECC), Porto, Portugal, 4–7 September 2001; pp. 3452–3457. [Google Scholar]
- Srbinovska, M.; Dimcev, V.; Gavrovski, C. Energy consumption estimation of wireless sensor networks in greenhouse crop production. In Proceedings of the IEEE EUROCON 2017—17th International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 870–875. [Google Scholar]
- Li, X.; Cheng, X.; Yan, K.; Gong, P. A Monitoring System for Vegetable Greenhouses based on a Wireless Sensor Network. Sensors 2010, 10, 8963–8980. [Google Scholar] [CrossRef] [PubMed]
- Stoica, P.; Moses, R.L. Spectral Analysis of Signals; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2005; Volume 1. [Google Scholar]
- Pashazadeh, A.; Navimipour, N.J. Big data handling mechanisms in the healthcare applications: A comprehensive and systematic literature review. J. Biomed. Inform. 2018. [Google Scholar] [CrossRef] [PubMed]
- Kamble, S.S.; Gunasekaran, A.; Gawankar, S.A. Sustainable Industry 4.0 framework: A systematic literature review identifying the current trends and future perspectives. Process Saf. Environ. Prot. 2018, 117, 408–425. [Google Scholar] [CrossRef]
- Ip, R.H.; Ang, L.M.; Seng, K.P.; Broster, J.; Pratley, J. Big data and machine learning for crop protection. Comput. Electron. Agric. 2018, 151, 376–383. [Google Scholar] [CrossRef]
- Bohaienko, V.; Popov, V. Optimization of Operation Regimes of Irrigation Canals Using Genetic Algorithms. In Proceedings of the International Conference on Theory and Applications of Fuzzy Systems and Soft Computing, Kiev, Ukraine, 18–20 January 2018; pp. 224–233. [Google Scholar]
- Osroosh, Y.; Khot, L.R.; Peters, R.T. Economical thermal-RGB imaging system for monitoring agricultural crops. Comput. Electron. Agric. 2018, 147, 34–43. [Google Scholar] [CrossRef]
- Hsiao, L.H.; Cheng, K.S. Assessing uncertainty in LULC classification accuracy by using bootstrap resampling. Remote Sens. 2016, 8, 705. [Google Scholar] [CrossRef]
- Dell’Acqua, F.; Iannelli, G.C.; Torres, M.A.; Martina, M.L. A Novel Strategy for Very-Large-Scale Cash-Crop Mapping in the Context of Weather-Related Risk Assessment, Combining Global Satellite Multispectral Datasets, Environmental Constraints, and In Situ Acquisition of Geospatial Data. Sensors 2018, 18, 591. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Wang, J.; Guo, S.; Zhang, J.; Wei, B.; Sun, J.; Shu, S. Ventilation optimization of solar greenhouse with removable back walls based on CFD. Comput. Electron. Agric. 2018, 149, 16–25. [Google Scholar] [CrossRef]
- Liu, H.; Chahl, J.S. A multispectral machine vision system for invertebrate detection on green leaves. Comput. Electron. Agric. 2018, 150, 279–288. [Google Scholar] [CrossRef]
- Qaddoum, K.; Hines, E.; Iliescu, D. Yield Prediction Technique Using Hybrid Adaptive Neural Genetic Network. Int. J. Comput. Intell. Appl. 2012, 11, 1250021. [Google Scholar] [CrossRef]
- Zhang, F.; Iliescu, D.; Hines, E.; Leeson, M.; Adams, S. Decision Support System for Greenhouse Tomato Yield Prediction using Artificial Intelligence Techniques. In Machine Learning: Concepts, Methodologies, Tools and Applications; IGI Global: Hershey, PA, USA, 2012; pp. 1507–1523. [Google Scholar]
- Vijayabaskar, P.; Sreemathi, R.; Keertanaa, E. Crop prediction using predictive analytics. In Proceedings of the International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Melmaruvathur, India, 22–23 March 2017; pp. 370–373. [Google Scholar]
- Shinghal, D.; Srivastava, N. Wireless Sensor Networks in Agriculture: For Potato Farming. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=3041375 (accessed on 20 March 2018).
- Abbasi, A.Z.; Islam, N.; Shaikh, Z.A. A review of wireless sensors and networks’ applications in agriculture. Comput. Stand. Interfaces 2014, 36, 263–270. [Google Scholar]
- Wallach, D.; Makowski, D.; Jones, J.W.; Brun, F. Working with Dynamic Crop Models: Methods, Tools and Examples for Agriculture and Environment; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Montesino-San Martin, M.; Wallach, D.; Olesen, J.E.; Challinor, A.; Hoffman, M.; Koehler, A.K.; Rötter, R.; Porter, J. Data requirements for crop modelling—Applying the learning curve approach to the simulation of winter wheat flowering time under climate change. Eur. J. Agron. 2018, 95, 33–44. [Google Scholar] [CrossRef]
- Coble, K.H.; Mishra, A.K.; Ferrell, S.; Griffin, T. Big Data in Agriculture: A Challenge for the Future. Appl. Econ. Perspect. Policy 2018, 40, 79–96. [Google Scholar] [CrossRef]
- Aquino-Santos, R.; González-Potes, A.; Edwards-Block, A.; Virgen-Ortiz, R.A. Developing a new wireless sensor network platform and its application in precision agriculture. Sensors 2011, 11, 1192–1211. [Google Scholar] [CrossRef] [PubMed]
- Keshtgary, M.; Deljoo, A. An efficient wireless sensor network for precision agriculture. Can. J. Multimed. Wirel. Netw. 2012, 3, 1–5. [Google Scholar]
- El-Kader, S.M.A.; El-Basioni, B.M.M. Precision farming solution in Egypt using the wireless sensor network technology. Egypt. Inform. J. 2013, 14, 221–233. [Google Scholar] [CrossRef]
- Mansouri, M.; Dumont, B.; Destain, M.F. Prediction of non-linear time-variant dynamic crop model using bayesian methods. In Precision Agriculture’13; Springer: Berlin, Germany, 2013; pp. 507–513. [Google Scholar]
- Kodali, R.K.; Soratkal, S.; Boppana, L. WSN in coffee cultivation. In Proceedings of the International Conference on Computing, Communication and Automation (ICCCA), Noida, India, 29–30 April 2016; pp. 661–666. [Google Scholar]
- Ferrández-Pastor, F.J.; García-Chamizo, J.M.; Nieto-Hidalgo, M.; Mora-Pascual, J.; Mora-Martínez, J. Developing ubiquitous sensor network platform using internet of things: Application in precision agriculture. Sensors 2016, 16, 1141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Piamonte, M.; Huerta, M.; Clotet, R.; Padilla, J.; Vargas, T.; Rivas, D. WSN Prototype for African Oil Palm Bud Rot Monitoring. In Proceedings of the International Conference of ICT for Adapting Agriculture to Climate Change, Popayán, Colombia, 22–24 November 2017; pp. 170–181. [Google Scholar]
- Ponce-Guevara, K.; Palacios-Echeverría, J.; Maya-Olalla, E.; Domínguez-Limaico, H.; Suárez-Zambrano, L.; Rosero-Montalvo, P.; Peluffo-Ordóñez, D.; Alvarado-Pérez, J. GreenFarm-DM: A tool for analyzing vegetable crops data from a greenhouse using data mining techniques (First trial). In Proceedings of the IEEE Second Ecuador Technical Chapters Meeting (ETCM), Salinas, Ecuador, 16–20 October 2017; pp. 1–6. [Google Scholar]
- García-Ruiz, R.A.; López-Martínez, J.; Blanco-Claraco, J.L.; Pérez-Alonso, J.; Callejón-Ferre, Á.J. On air temperature distribution and ISO 7726-defined heterogeneity inside a typical greenhouse in Almería. Comput. Electron. Agric. 2018, 151, 264–275. [Google Scholar] [CrossRef]
- Caicedo-Ortiz, J.G.; De-la Hoz-Franco, E.; Ortega, R.M.; Piñeres-Espitia, G.; Combita-Niño, H.; Estévez, F.; Cama-Pinto, A. Monitoring system for agronomic variables based in WSN technology on cassava crops. Comput. Electron. Agric. 2018, 145, 275–281. [Google Scholar] [CrossRef]
- Lee, M.; Hwang, J.; Yoe, H. Agricultural production system based on IoT. In Proceedings of the IEEE 16th International Conference on Computational Science and Engineering, Sydney, Australia, 3–5 December 2013; pp. 833–837. [Google Scholar]
- Chapman, R.; Cook, S.; Donough, C.; Lim, Y.L.; Ho, P.V.V.; Lo, K.W.; Oberthür, T. Using Bayesian networks to predict future yield functions with data from commercial oil palm plantations: A proof of concept analysis. Comput. Electron. Agric. 2018, 151, 338–348. [Google Scholar] [CrossRef]
- Goya-Esteban, R.; Sandberg, F.; Barquero-Pérez, Ó.; García-Alberola, A.; Sörnmo, L.; Rojo-Álvarez, J.L. Long-term characterization of persistent atrial fibrillation: Wave morphology, frequency, and irregularity analysis. Med. Biol. Eng. Comput. 2014, 52, 1053–1060. [Google Scholar] [CrossRef] [PubMed]
- Turek, F.W. Circadian Rhythms. In Proceedings of the 1992 Laurentian Hormone Conference; Bardin, C.W., Ed.; Academic Press: Boston, MA, USA, 1994; Volume 49, pp. 43–90. [Google Scholar]
- Cornelissen, G. Cosinor-based rhythmometry. Theor. Biol. Med. Model. 2014, 11, 16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nakra, B.; Chaudhry, K. Instrumentation, Measurement and Analysis, 2nd ed.; Tata McGraw-Hill: New York, NY, USA, 2010. [Google Scholar]
- Koneru, S. Engineering Mathematics; Universities Press: Hyderabad, India, 2002. [Google Scholar]
- Burtis, C.; Bruns, D. Tietz Fundamentals of Clinical Chemistry and Molecular Diagnostics-E-Book, 5th ed.; Elsevier Health Sciences: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Choudhary, P.; Nagaraja, H. Measuring Agreement: Models, Methods, and Applications, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2017; Volume 891. [Google Scholar]
- Zheng, L.; Pan, W.; Li, Y.; Luo, D.; Wang, Q.; Liu, G. Use of Mutual Information and Transfer Entropy to Assess Interaction between Parasympathetic and Sympathetic Activities of Nervous System from HRV. Entropy 2017, 19, 489. [Google Scholar] [CrossRef]
- Pollino, C.; Woodberry, O.; Nicholson, A.; Korb, K.; Hart, B. Parameterisation and evaluation of a Bayesian network for use in an ecological risk assessment. Environ. Model. Softw. 2007, 22, 1140–1152. [Google Scholar] [CrossRef]
- Maimaitiyiming, M.; Ghulam, A.; Tiyip, T.; Pla, F.; Latorre-Carmona, P.; Halik, T.; Sawut, M.; Caetano, M. Effects of green space spatial pattern on land surface temperature: Implications for sustainable urban planning and climate change adaptation. ISPRS J. Photogramm. Remote Sens. 2014, 89, 59–66. [Google Scholar] [CrossRef] [Green Version]
- CENTA. Centro Nacional de Tecnología Agropecuaria y Forestal. Guía Técnica Cultivo de Tomate: Arce, El Salvador. Available online: http://www.centa.gob.sv/docs/guias/hortalizas/Guia%20Tomate.pdf (accessed on 10 July 2018).
- Jin, C.; Du, S.; Wang, Y.; Condon, J.; Lin, X.; Zhang, Y. Carbon dioxide enrichment by composting in greenhouses and its effect on vegetable production. J. Plant Nutr. Soil Sci. 2009, 172, 418–424. [Google Scholar] [CrossRef]
- Kuşçu, H.; Turhan, A.; Demir, A.O. The response of processing tomato to deficit irrigation at various phenological stages in a sub-humid environment. Agric. Water Manag. 2014, 133, 92–103. [Google Scholar] [CrossRef]
- Preedy, V.R. Tomatoes and Tomato Products: Nutritional, Medicinal and Therapeutic Properties; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Ahonen, T.; Virrankoski, R.; Elmusrati, M. Greenhouse Monitoring with Wireless Sensor Network. In Proceedings of the IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; pp. 403–408. [Google Scholar]
- Pawlowski, A.; Guzman, J.L.; Rodríguez, F.; Berenguel, M.; Sánchez, J.; Dormido, S. Simulation of greenhouse climate monitoring and control with wireless sensor network and event-based control. Sensors 2009, 9, 232–252. [Google Scholar] [CrossRef] [PubMed]
- Gutiérrez, J.M. Redes Probabilísticas y Neuronales en las Ciencias Atmosféricas; Ministerio de Medio Ambiente, Secretaría General Técnica: Madrid, España, 2004. [Google Scholar]
- Goya-Esteban, R.; Mora-Jiménez, I.; Rojo-Alvarez, J.L.; Barquero-Pérez, Ó.; Pastor-Pérez, F.J.; Manzano-Fernández, S.; Pascual-Figal, D.A.; García-Alberola, A. Heart rate variability on 7-day Holter monitoring using a bootstrap rhythmometric procedure. IEEE Trans. Biomed. Eng. 2010, 57, 1366–1376. [Google Scholar] [CrossRef] [PubMed]
- Efron, B.; Tibshirani, R. An Introduction to the Bootstrap; CRC Press: Boca Raton, FL, USA, 1994. [Google Scholar]
- Cover, T.; Thomas, J. Elements of Information Theory, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Case Study Variables | Technical Contribution |
|---|---|---|
| Aquino et al. (2011) [37] | Air temperature, air relative humidity, soil temperature, and moisture. | Development of a new platform for wireless sensor networks, with a modified version of the routing algorithm LORA_CBF to precision agriculture. |
| Keshtgary et al. (2012) [38] | Water-level, gate position, rainfall, and soil moisture. | Performance metrics (delay, throughput and load) of WSN for precision agriculture using grid and random topology. |
| El-Kader et al. (2013) [39] | Soil moisture, air elative humidity, air temperature, pH, and luminosity. | Precision farming solution for potato crop in Egypt using WSN. |
| Mansouri et al. (2013) [40] | Soil moisture. | Comparison of estimating methods using three different filters (Variational, Kalman and Extended Kalman) for state variables of crops. |
| Kodali et al. (2016) [41] | Soil moisture. | Water stress monitoring during dry season on coffee crops in India using WSN irrigation management. |
| Ferrández et al. (2016) [42] | Luminosity, water PH level, atmospheric humidity, and electric conductivity. | Heterogeneous and scalable platform based on Ubiquitous Sensor Networks (USN) and Internet of Things (IoT) paradigms for crop automation. |
| Piamonte et al. (2017) [43] | PH, humidity, air temperature and luminosity. | Analysis of environmental variables of influence on African palm cultivation using big data tools |
| Ponce et al. (2017) [44] | Soil moisture, air relative humidity, air temperature, luminosity level, and CO | Greenhouse WSN data analysis using data mining. |
| García Ruiz et al. (2018) [45] | Air temperature. | Indoor greenhouse air temperature collection using WSN |
| Caicedo et al. (2018) [46] | Soil moisture, and soil temperature. | Development of a prototype for monitoring of agronomic variables in cassava crops, and modeling to determine the location nodes. |
| Lee (2013) [47] | Air temperature, and humidity. | Design of an agricultural production system based on IoT for predicting the growth and quantity of crop production. |
| Chapman et al. (2018) [48] | Air relative humidity, PH, and air temperature. | Design of Bayesian networks to predict the performance functions of three commercial oil palm farms. |
| Variable (Measuring Unit) | Network | Sensor Node | Error Range | Average Relative Frequency | Matching Limits | Histogram Distribution | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CO (ppm) | DigiMesh | 4 | 100 | 33 | 1 | 16 | CSR | −6, +5 | 778 | −2.78, +2.78 | GA |
| WiFi | 4 | 4 | 13 | 0 | 15 | VSR | −15, +15 | 884 | −8.64, +8.65 | G | |
| Air relative humidity (% RH) | DigiMesh | 1 | 50 | 4 | 1 | 16 | CSR | −10, +8.5 | 449 | −3.91, +3.91 | NG, U, LB |
| 2 | 50 | 5 | 1 | 16 | CSR | −7.5, +6.5 | 929 | −2.62, +2.63 | NG, U, LB | ||
| 3 | 50 | 1 | 1 | 16 | CSR | −7.5, +6.5 | 906 | −2.73, +2.73 | NG, U, LB | ||
| ZigBee | 1 | 50 | 5 | 1 | 16 | CSR | −9.5, +8.5 | 685 | −3.12, +3.13 | NG, U, LB | |
| 2 | 50 | 1 | 1 | 16 | CSR | −5.7, +4.2 | 752 | −1.67, +1.67 | NG, U, LB | ||
| 3 | 50 | 32 | 1 | 16 | CSR | −6.6, +5.4 | 501 | −1.94, +1.98 | NG, U, LB | ||
| WiFi | 1 | 6 | 6 | 1 | 16 | VSR | −6.2, +5.6 | 1909 | −1.52, +1.52 | NG, U, RB | |
| 2 | 6 | 34 | 1 | 11 | VSR | −6.6, +3.9 | 2479 | −1.90, +1.89 | GA | ||
| 3 | 6 | 25 | 1 | 10 | VSR | −9, +4.5 | 1426 | −2.11, +2.10 | NG, U, LB | ||
| Luminosity (Lux) | DigiMesh | 1 | 120 | 110 | 1 | 13 | CSR | −1.1 × 10, +10 | 1416 | −4859, +4787 | NG, U, RB |
| 2 | 120 | 100 | 1 | 15 | CSR | −1.5 × 10, +1.9 × 10 | 1345 | −4987, +4899 | NG, M, LB | ||
| 3 | 120 | 10 | 1 | 16 | CSR | −1.05 × 10, +10 | 1345 | −3674, +3667 | NG, M, RB | ||
| ZigBee | 1 | 120 | 100 | 1 | 15 | CSR | −0.5 × 10, +0.8 × 10 | 1038 | −2780, +2707 | NG, M, LB | |
| 2 | 120 | 420 | 1 | 14 | CSR | −1.05 × 10, +10 | 800 | −4374, +4176 | NG, M, RB | ||
| 3 | 120 | 40 | 1 | 16 | CSR | −1.05 × 10, +1.65 × 10 | 1151 | −3844, +3813 | NG, U, RB | ||
| WiFi | 1 | 5 | 50 | 0 | 8 | VSR | −1.5 × 104, +1.65 × 10 | 1742 | −4516, +4511 | NG, M, LB | |
| 2 | 5 | 12 | 1 | 12 | VSR | −0.51 × 10, +0.93 × 10 | 2899 | −2339, +2244 | NG, U, LB | ||
| 3 | 5 | 12 | 0 | 7 | VSR | −0.85 × 10, +1.15 × 10 | 826 | −3863, +3863 | NG, M, LB | ||
| Solar radiation (nm) | DigiMesh | 1 | 60 | 1 | 1 | 15 | CSR | −160, +210 | 1082 | −83.65, +83.64 | NG, M, RB |
| ZigBee | 2 | 60 | 300 | 1 | 15 | CSR | −240, +260 | 2038 | −84.38, +97.8 | NG, U, LB | |
| WiFi | 2 | 4 | 1 | 0 | 5 | VSR | −200, +260 | 639 | −77.45, 77.15 | NG, M, LB | |
| UV radiation (nm) | DigiMesh | 3 | 60 | 42 | 1 | 15 | CSR | −15, +18 | 1569 | −5.92, +5.78 | NG, U, RB |
| ZigBee | 3 | 60 | 110 | 1 | 16 | CSR | −13, +18 | 1753 | −5.58, +5.46 | NG, U, LB | |
| WiFi | 3 | 4 | 20 | 1 | 7 | VSR | −22, +25 | 1980 | −10 × 10, +10.06 | NG, M, RB | |
| Air temperature (C) | DigiMesh | 1 | 50 | 14 | 1 | 15 | CSR | −4.2, +5.7 | 730 | −2, +2 | NG, M, RG |
| 2 | 50 | 5 | 1 | 16 | CSR | −4.2, +5.1 | 728 | −1.86, +1.86 | NG, M, RB | ||
| 3 | 50 | 7 | 1 | 16 | CSR | −10, +12 | 611 | −3.68, +3.68 | NG, M, LB | ||
| ZigBee | 1 | 50 | 6 | 1 | 13 | CSR | −5.4, +5.7 | 693 | −1.87, +1.87 | NG, U, LB | |
| 2 | 50 | 3 | 1 | 15 | CSR | −4, +4.6 | 925 | −1.34, +1.34 | NG, U, LB | ||
| 3 | 50 | 17 | 1 | 15 | CSR | −4.2, +5 | 616 | 1.48, +1.48 | NG, M, LB | ||
| WiFi | 1 | 4 | 4 | 0 | 9 | VSR | −7.8, +7.5 | 978 | −2.3, +2.3 | NG, M, RB | |
| 2 | 4 | 8 | 1 | 11 | VSR | −4.2, +5.6 | 2546 | −1.5, +1.5 | NG, U, RG | ||
| 3 | 4 | 20 | 1 | 12 | VSR | −3.2, +4.8 | 3039 | −1.32, +1.33 | NG, U, LB | ||
| Wind speed (km/h) | ZigBee | 1 | 100 | 12 | 1 | 13 | CSR | −2.8, +3.6 | 682 | −1.36, +1.35 | NG, M, LB |
| Wind direction (Positions) | ZigBee | 1 | 200 | 1700 | 1 | 16 | CSR | −0.66, +0.54 | 989 | −0.23, +0.24 | NG, M, RB |
| Variable | MI (bits) | DigiMesh | ZigBee | WiFi | |||
|---|---|---|---|---|---|---|---|
| Unfiltered | Filtered | Unfiltered | Filtered | Unfiltered | Filtered | ||
| Air relative humidity | Node 1 - Node 2 | 2.866 | 3.088 | 2.442 | 2.718 | 2.373 | 2.392 |
| Node 1 - Node 3 | 2.489 | 2.756 | 2.361 | 2.639 | 1.993 | 2.018 | |
| Node 2 - Node 3 | 2.724 | 3.025 | 2.580 | 2.880 | 2.083 | 2.090 | |
| Luminosity | Node 1 - Node 2 | 1.832 | 2.431 | 1.754 | 2.626 | 1.774 | 1.971 |
| Node 1 - Node 3 | 1.662 | 2.433 | 1.586 | 2.986 | 1.810 | 2.015 | |
| Node 2 - Node 3 | 1.686 | 2.304 | 1.836 | 2.737 | 1.807 | 1.935 | |
| Air temperature | Node 1 - Node 2 | 2.203 | 2.626 | 2.233 | 2.640 | 1.581 | 1.613 |
| Node 1 - Node 3 | 1.795 | 2.148 | 2.275 | 2.621 | 1.801 | 1.860 | |
| Node 2 - Node 3 | 1.808 | 2.129 | 2.420 | 2.984 | 1.527 | 1.562 | |
| Variable | MI (bits) | DigiMesh - WiFi | DigiMesh - ZigBee | ZigBee - WiFi | |||
|---|---|---|---|---|---|---|---|
| Unfiltered | Filtered | Unfiltered | Filtered | Unfiltered | Filtered | ||
| Air relative humidity | Node 1 - Node 1 | 2.011 | 2.016 | 2.234 | 2.642 | 2.112 | 2.112 |
| Node 2 - Node 2 | 2.347 | 2.373 | 2.357 | 2.558 | 2.342 | 2.373 | |
| Node 3 - Node 3 | 2.185 | 2.245 | 2.385 | 2.720 | 2.167 | 2.196 | |
| Node 1 - Node 2 | 2.136 | 2.133 | 2.150 | 2.428 | 2.354 | 2.384 | |
| Node 1 - Node 3 | 2.077 | 2.142 | 2.352 | 2.702 | 2.560 | 2.5885 | |
| Node 2 - Node 3 | 2.360 | 2.420 | 2.486 | 2.807 | 2.180 | 2.267 | |
| Luminosity | Node 1 - Node 1 | 1.560 | 1.633 | 1.556 | 2.405 | 1.836 | 1.883 |
| Node 2 - Node 2 | 1.542 | 1.617 | 1.495 | 2.198 | 1.629 | 1.711 | |
| Node 3 - Node 3 | 1.611 | 1.668 | 1.566 | 2.454 | 1.674 | 1.765 | |
| Node 1 - Node 2 | 1.489 | 1.571 | 1.588 | 2.367 | 1.754 | 1.856 | |
| Node 1 - Node 3 | 1.599 | 1.655 | 1.590 | 2.55 | 1.894 | 1.959 | |
| Node 2 - Node 3 | 1.592 | 1.681 | 1.595 | 2.454 | 1.701 | 1.754 | |
| Air temperature | Node 1 - Node 1 | 1.726 | 1.791 | 1.976 | 2.541 | 1.794 | 1.860 |
| Node 2 - Node 2 | 1.689 | 1.761 | 2.133 | 2.699 | 2.046 | 2.119 | |
| Node 3 - Node 3 | 1.449 | 1.534 | 1.715 | 1.993 | 1.644 | 1.733 | |
| Node 1 - Node 2 | 1.699 | 1.832 | 2.030 | 2.444 | 1.805 | 1.895 | |
| Node 1 - Node 3 | 1.550 | 1.599 | 2.107 | 2.53 | 1.632 | 1.705 | |
| Node 2 - Node 3 | 1.579 | 1.631 | 2.209 | 2.761 | 1.623 | 1.654 | |
| Solar radiation | Node 1 - Node 2 | 3.057 | 3.462 | 4.304 | 4.458 | 3.384 | 3.878 |
| UV radiation | Node 3 - Node 3 | 2.412 | 3.138 | 2.033 | 1.844 | 1.918 | 1.912 |
| CO | Node 4 - Node 4 | 0.766 | 0.637 | —– | —– | —– | —– |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erazo-Rodas, M.; Sandoval-Moreno, M.; Muñoz-Romero, S.; Huerta, M.; Rivas-Lalaleo, D.; Rojo-Álvarez, J.L. Multiparametric Monitoring in Equatorian Tomato Greenhouses (III): Environmental Measurement Dynamics. Sensors 2018, 18, 2557. https://doi.org/10.3390/s18082557
Erazo-Rodas M, Sandoval-Moreno M, Muñoz-Romero S, Huerta M, Rivas-Lalaleo D, Rojo-Álvarez JL. Multiparametric Monitoring in Equatorian Tomato Greenhouses (III): Environmental Measurement Dynamics. Sensors. 2018; 18(8):2557. https://doi.org/10.3390/s18082557
Chicago/Turabian StyleErazo-Rodas, Mayra, Mary Sandoval-Moreno, Sergio Muñoz-Romero, Mónica Huerta, David Rivas-Lalaleo, and José Luis Rojo-Álvarez. 2018. "Multiparametric Monitoring in Equatorian Tomato Greenhouses (III): Environmental Measurement Dynamics" Sensors 18, no. 8: 2557. https://doi.org/10.3390/s18082557