Analysis of 3D Scan Measurement Distribution with Application to a Multi-Beam Lidar on a Rotating Platform

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Related Work
2.1. Affordable Solutions for 3D Lidar Sensors
2.2. Evaluation of Scan Data
2.3. Our Approach
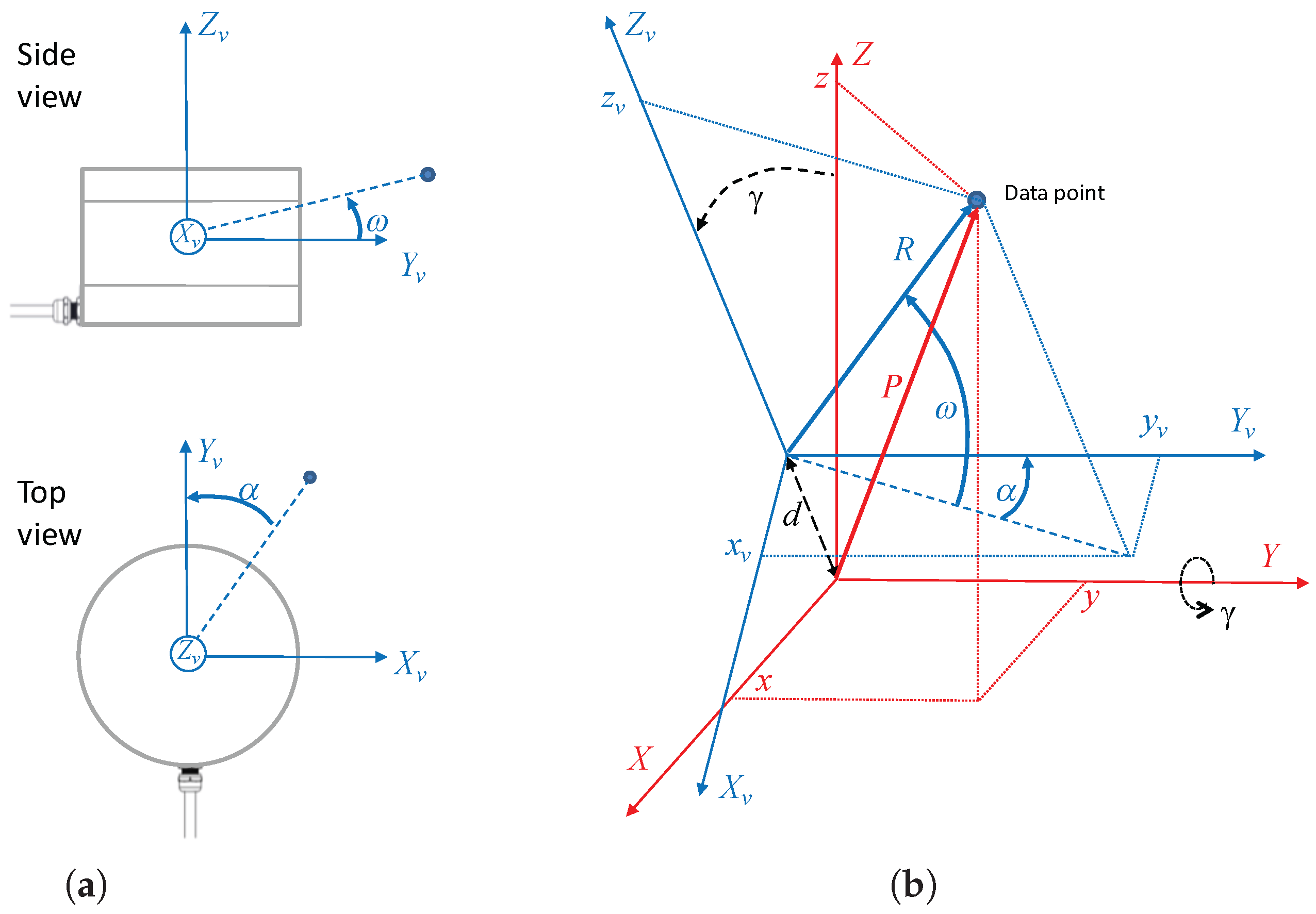
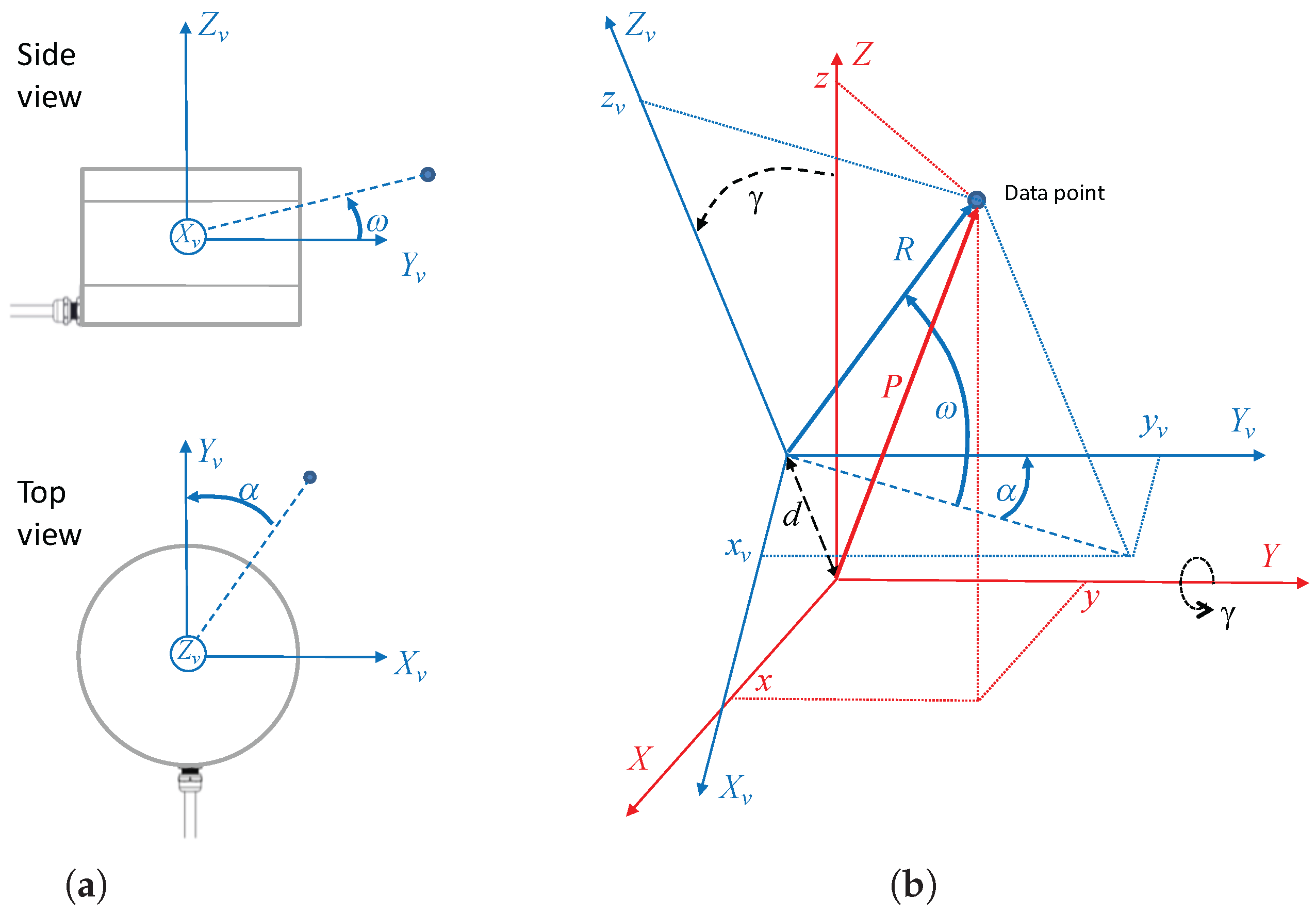
3. Rotation of a Multi-Beam Lidar Sensor
4. Analysis Methodology
4.1. Numerical Simulation
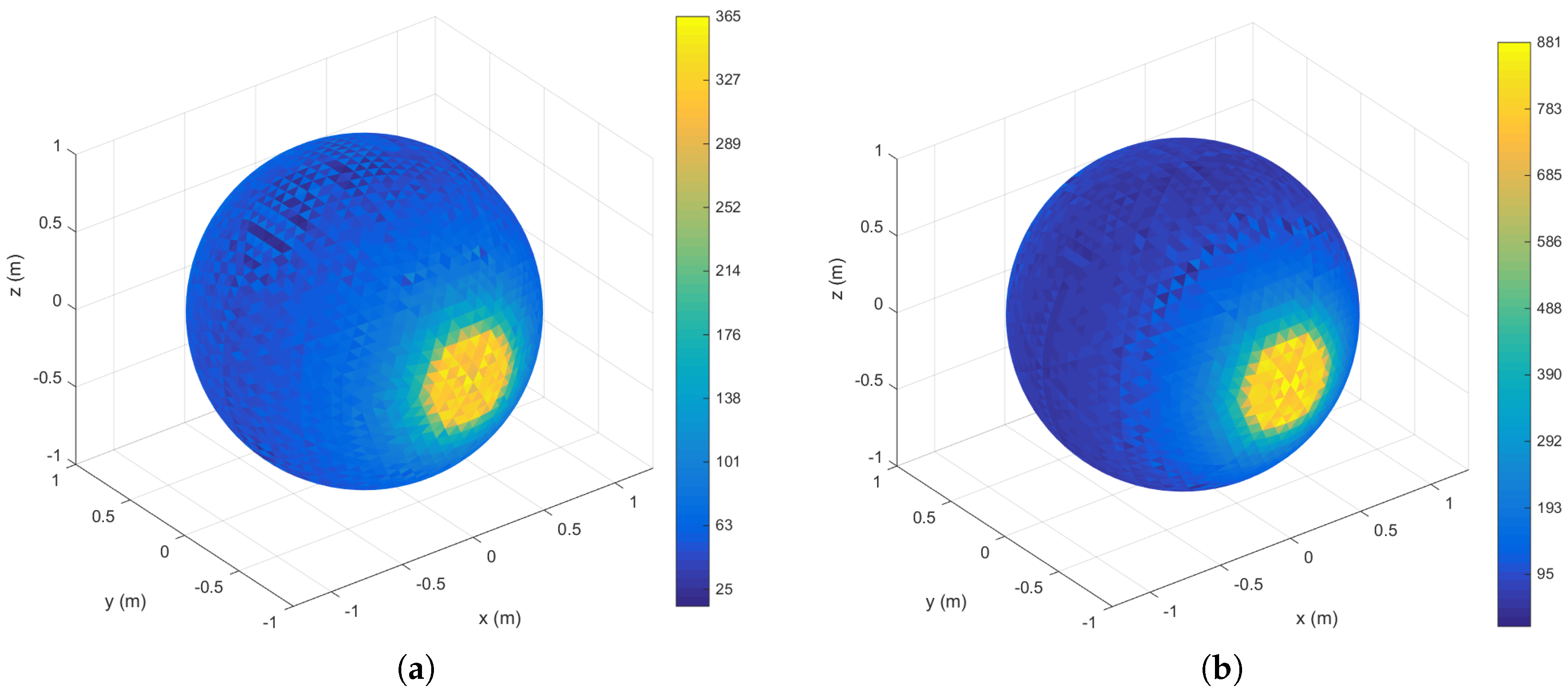
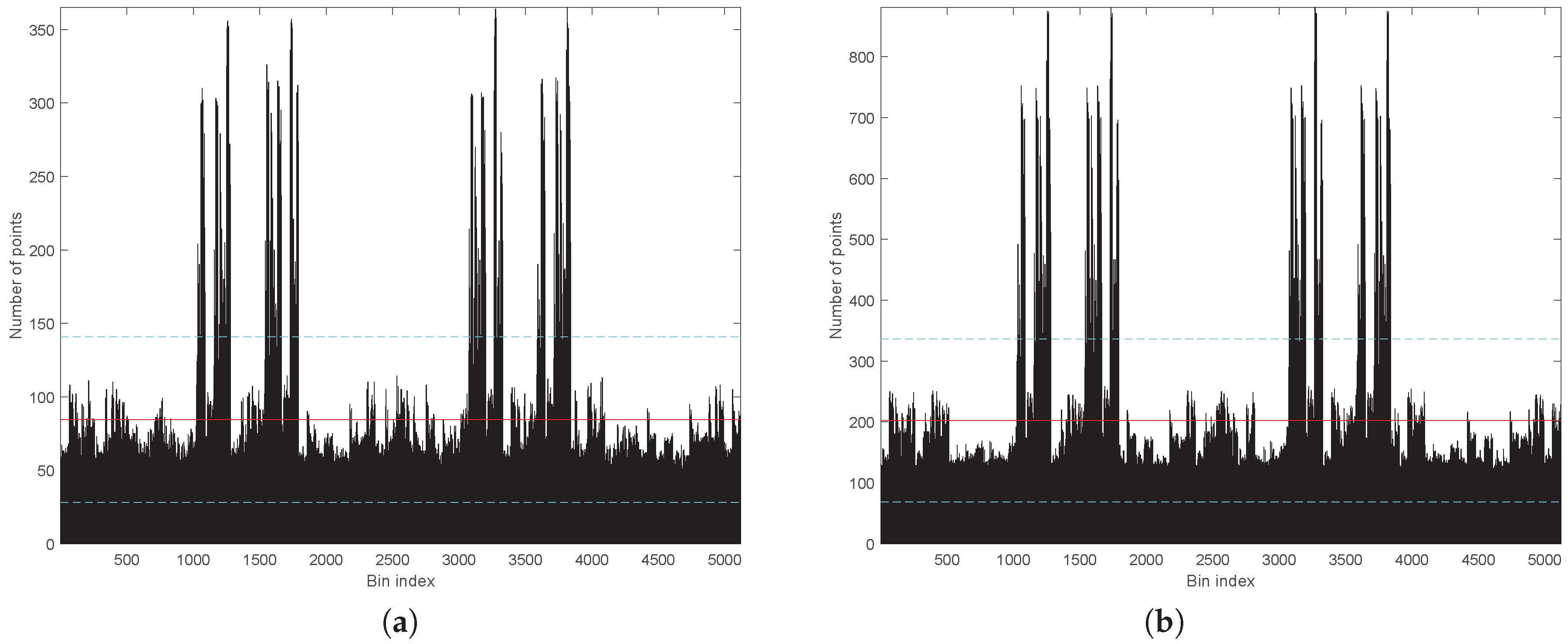
4.2. Sampling Density
4.3. Spatial Distribution Analysis of Scan Data with the K Function
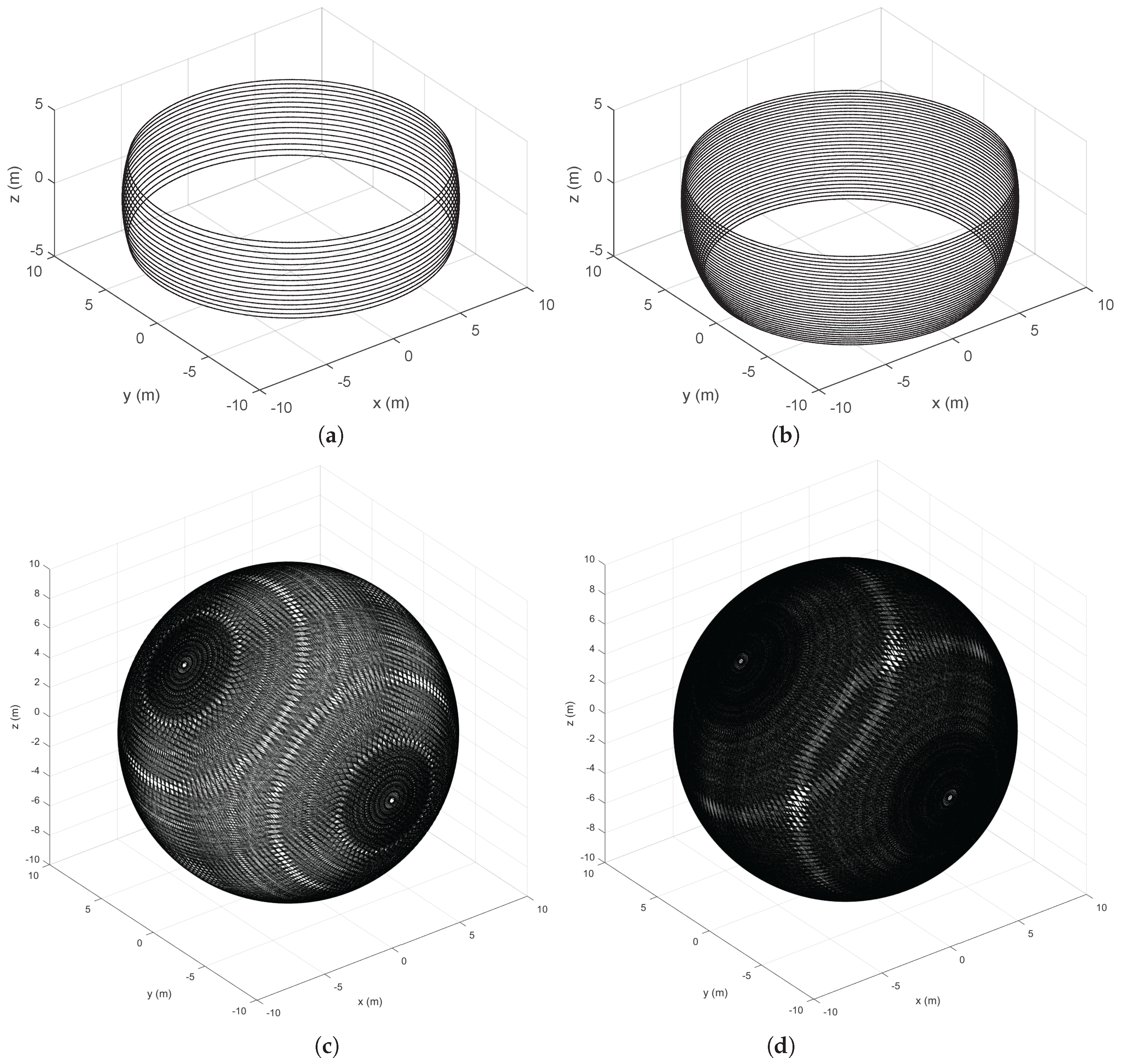
5. Analysis of Ideal RMBL Scanning Patterns and Comparison with Other 3D Configurations
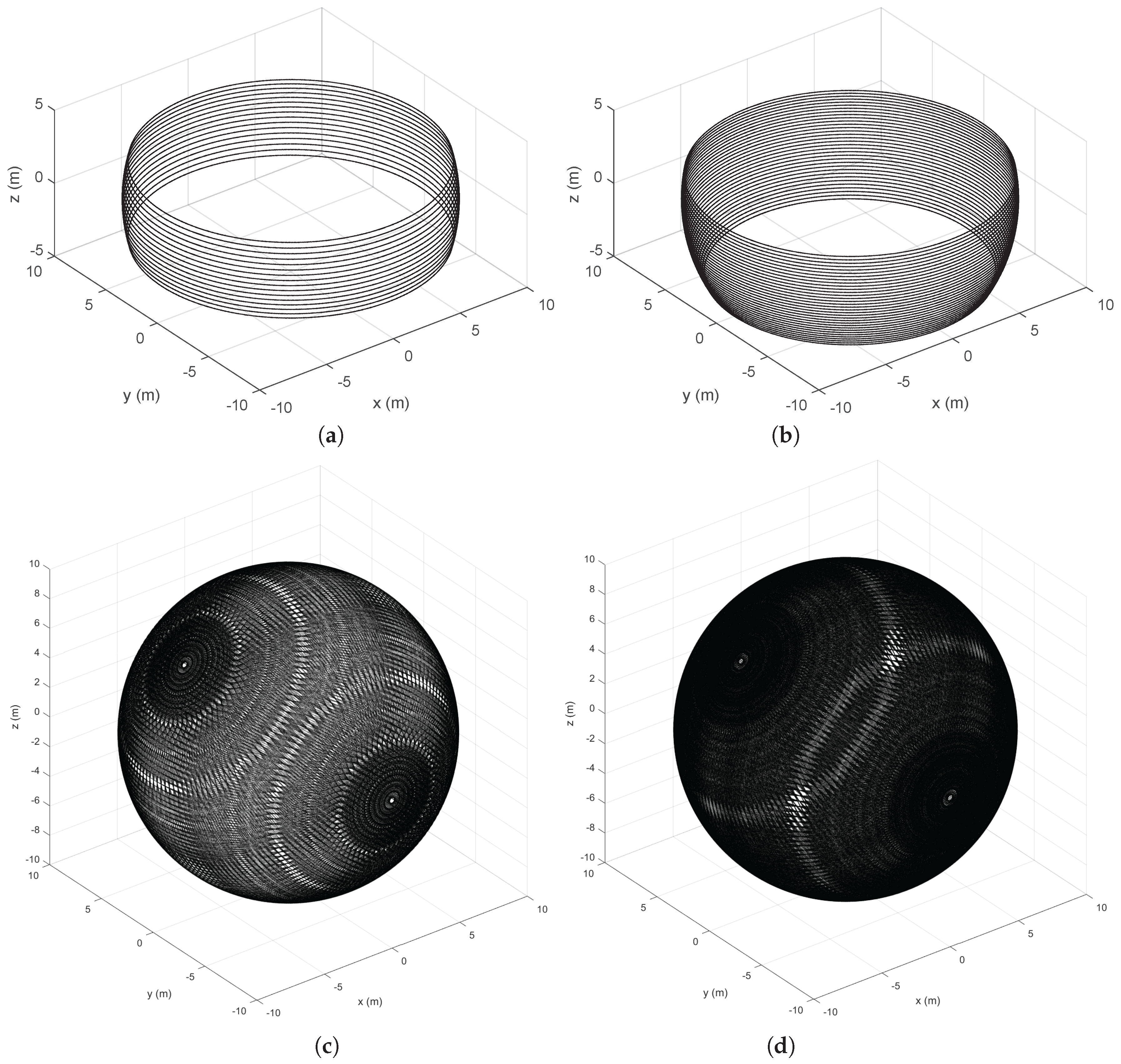
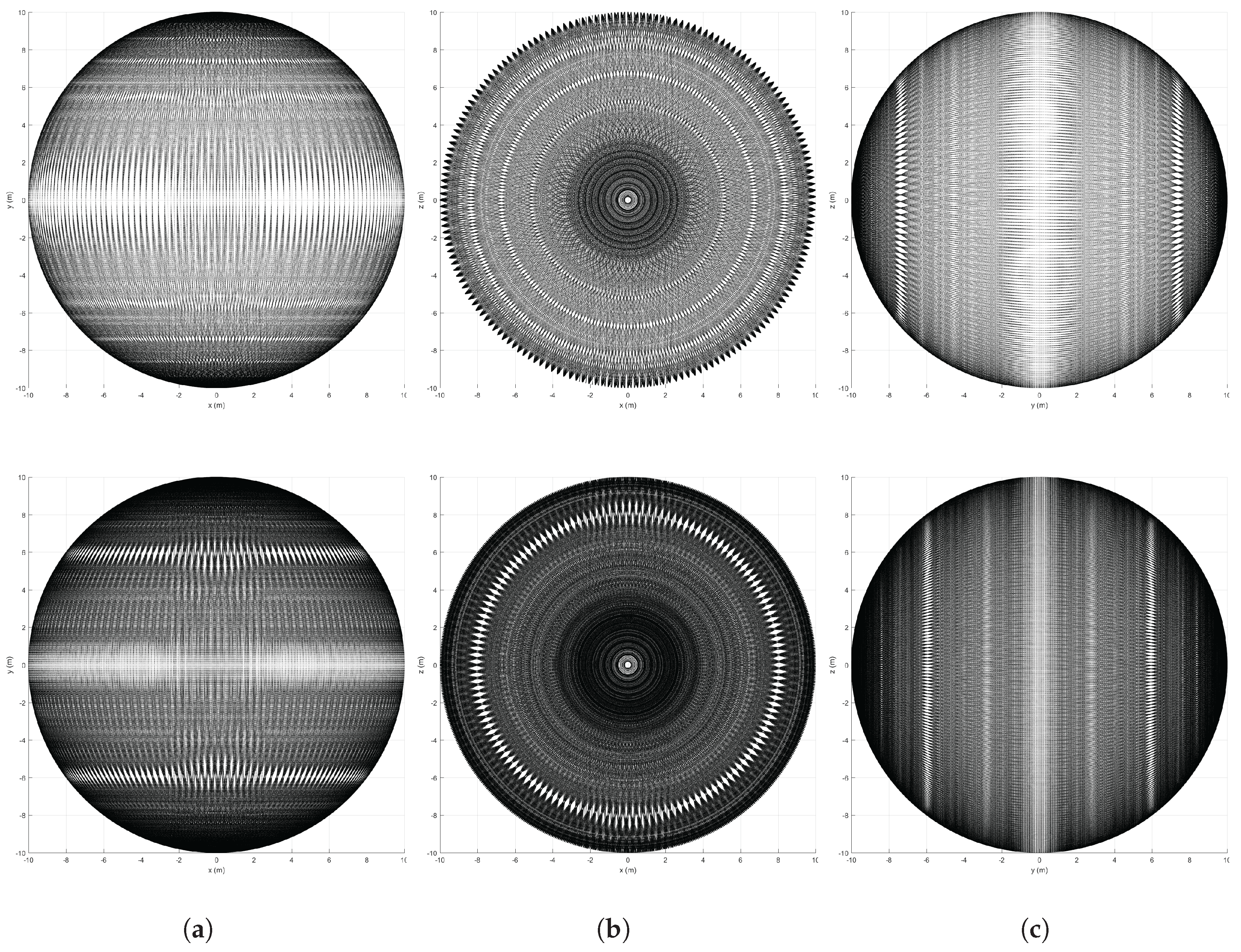
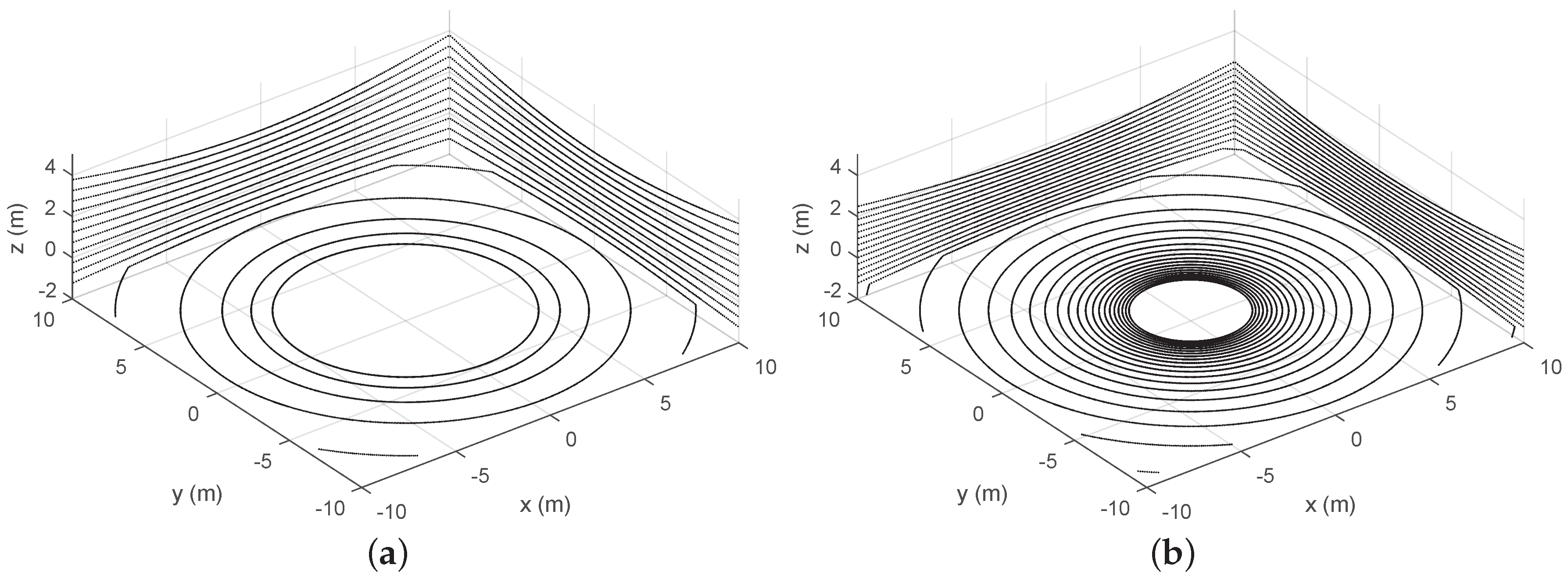
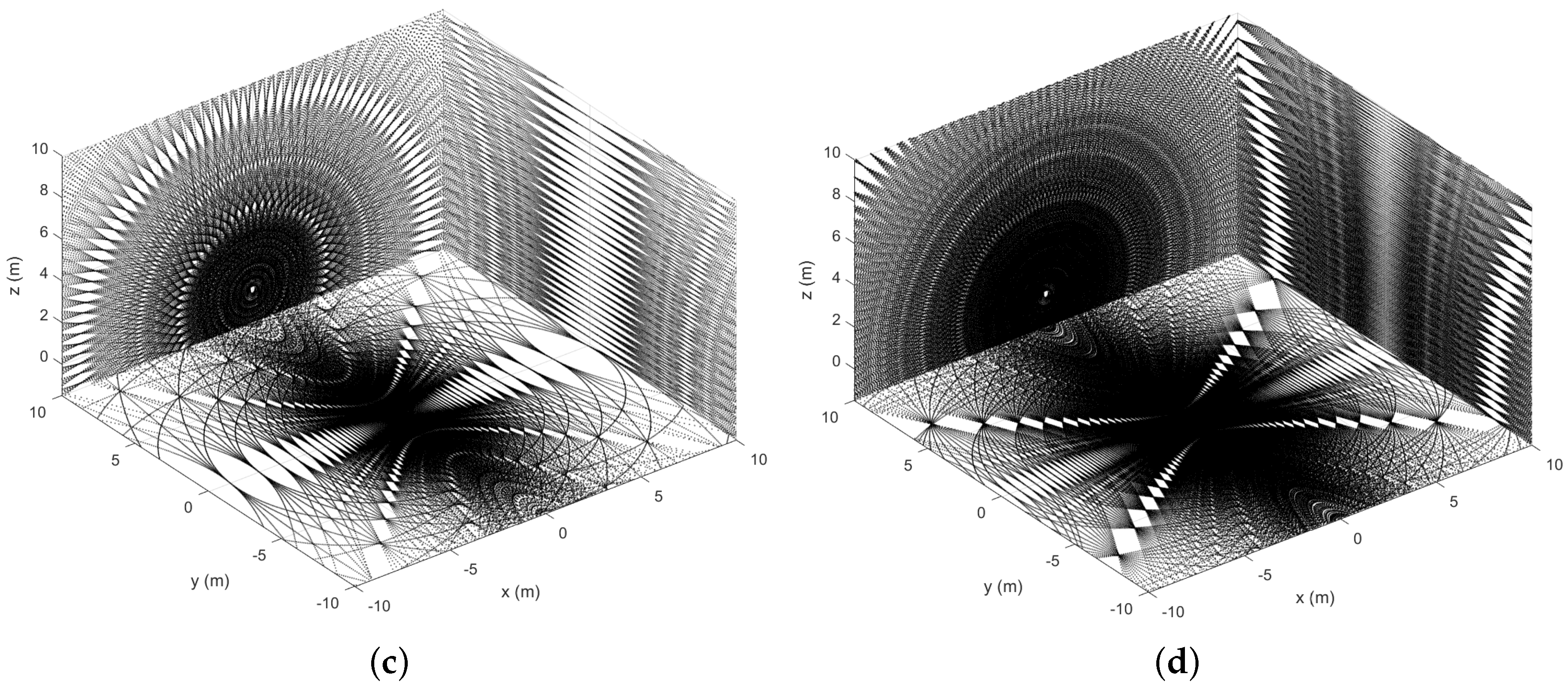
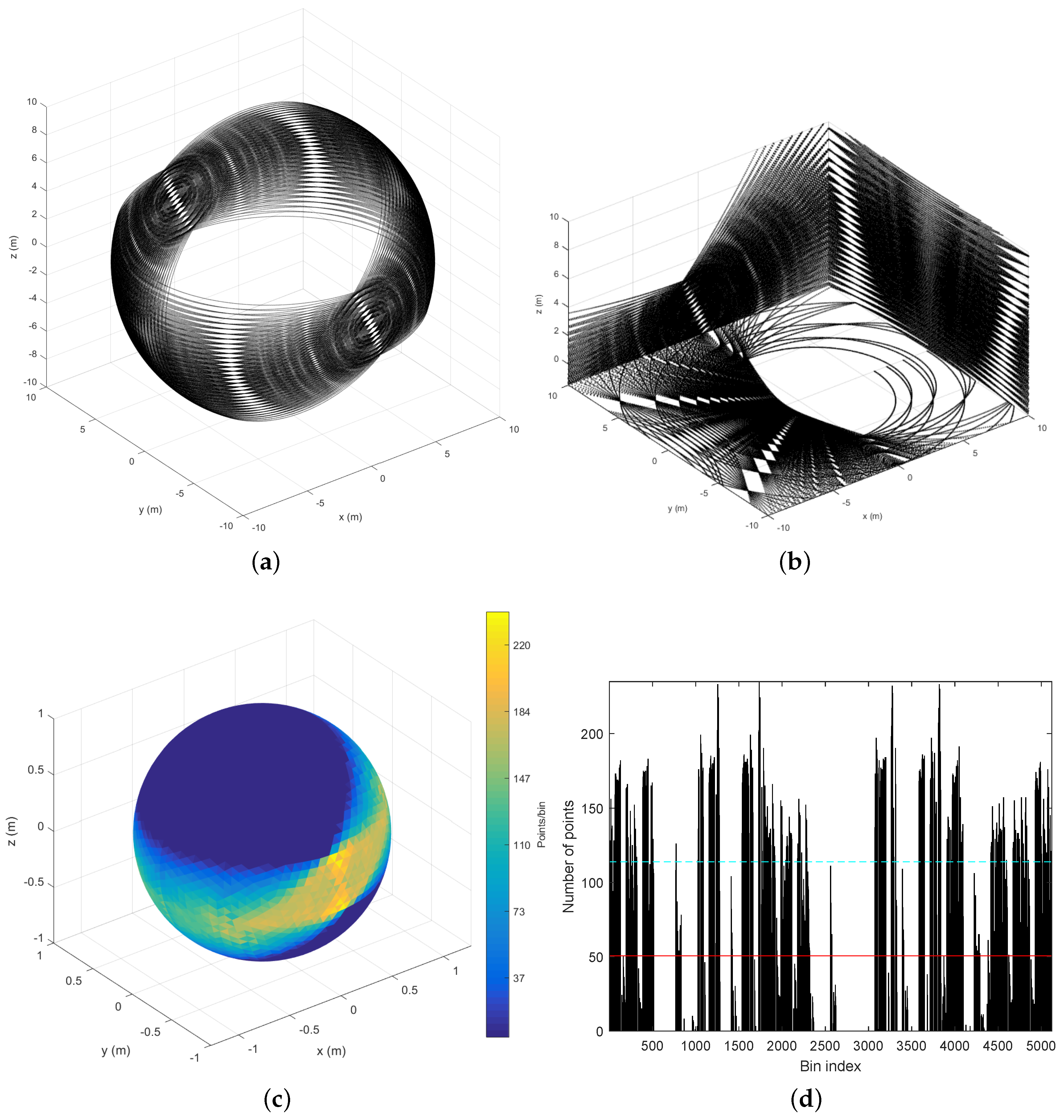
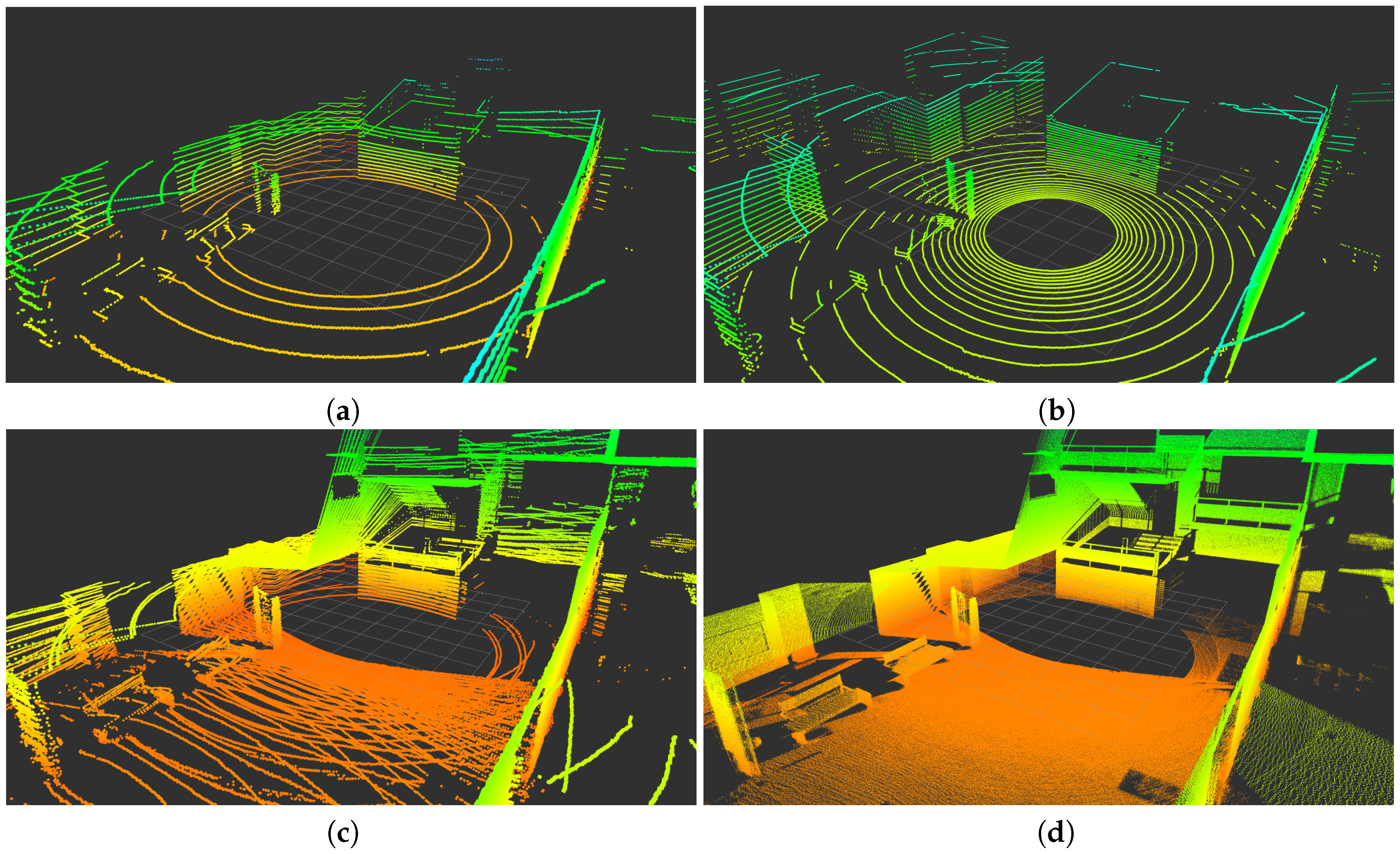
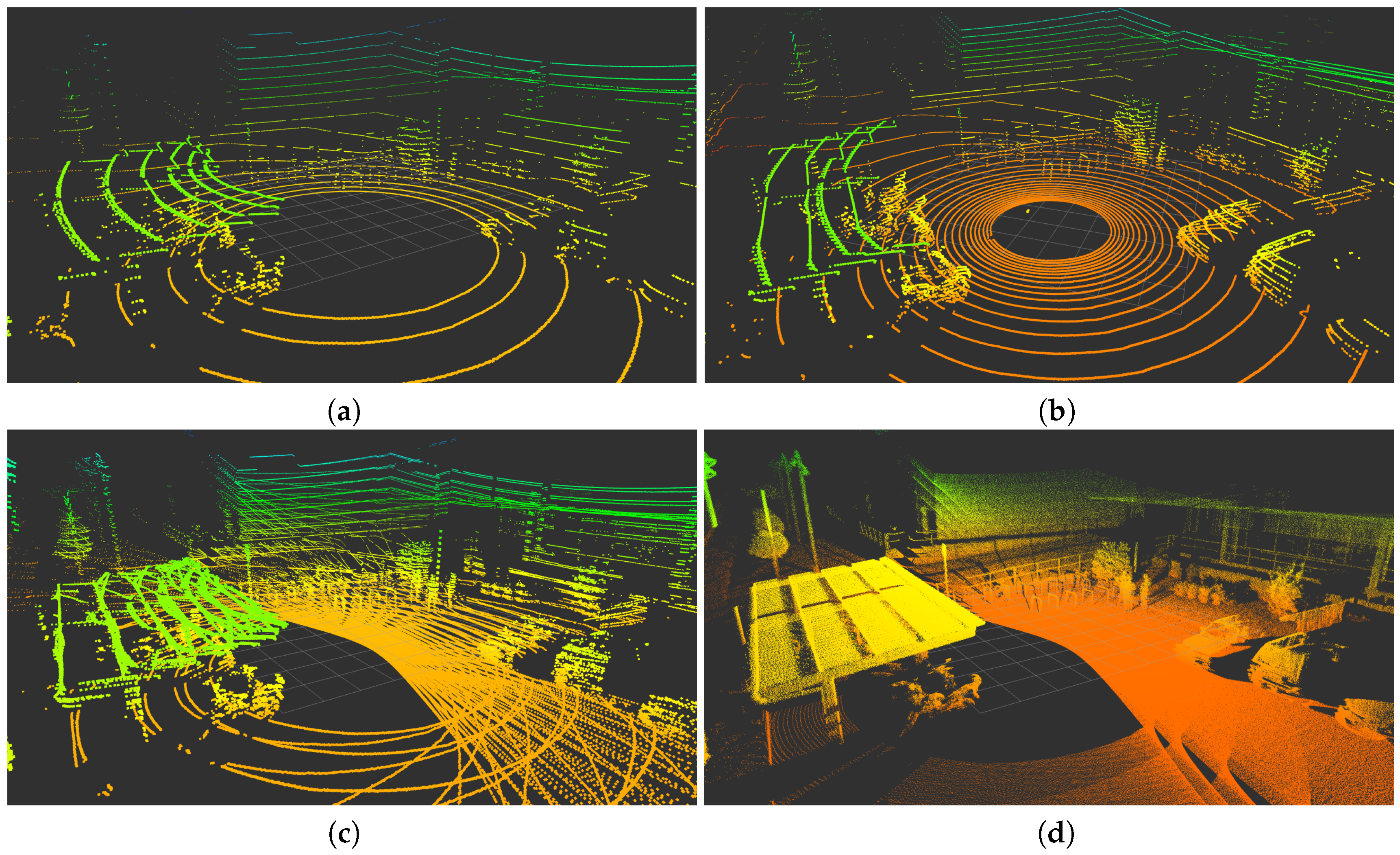
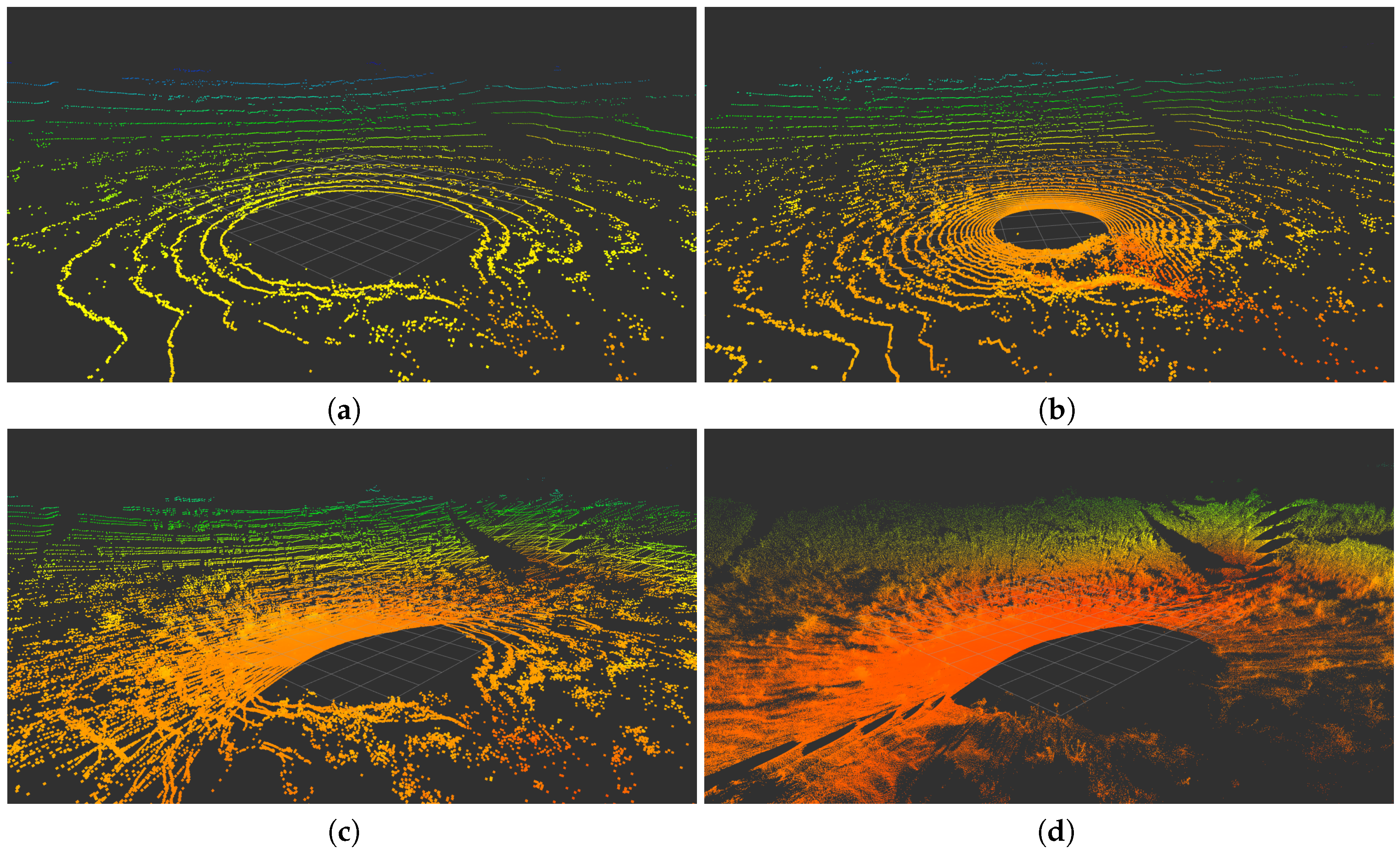
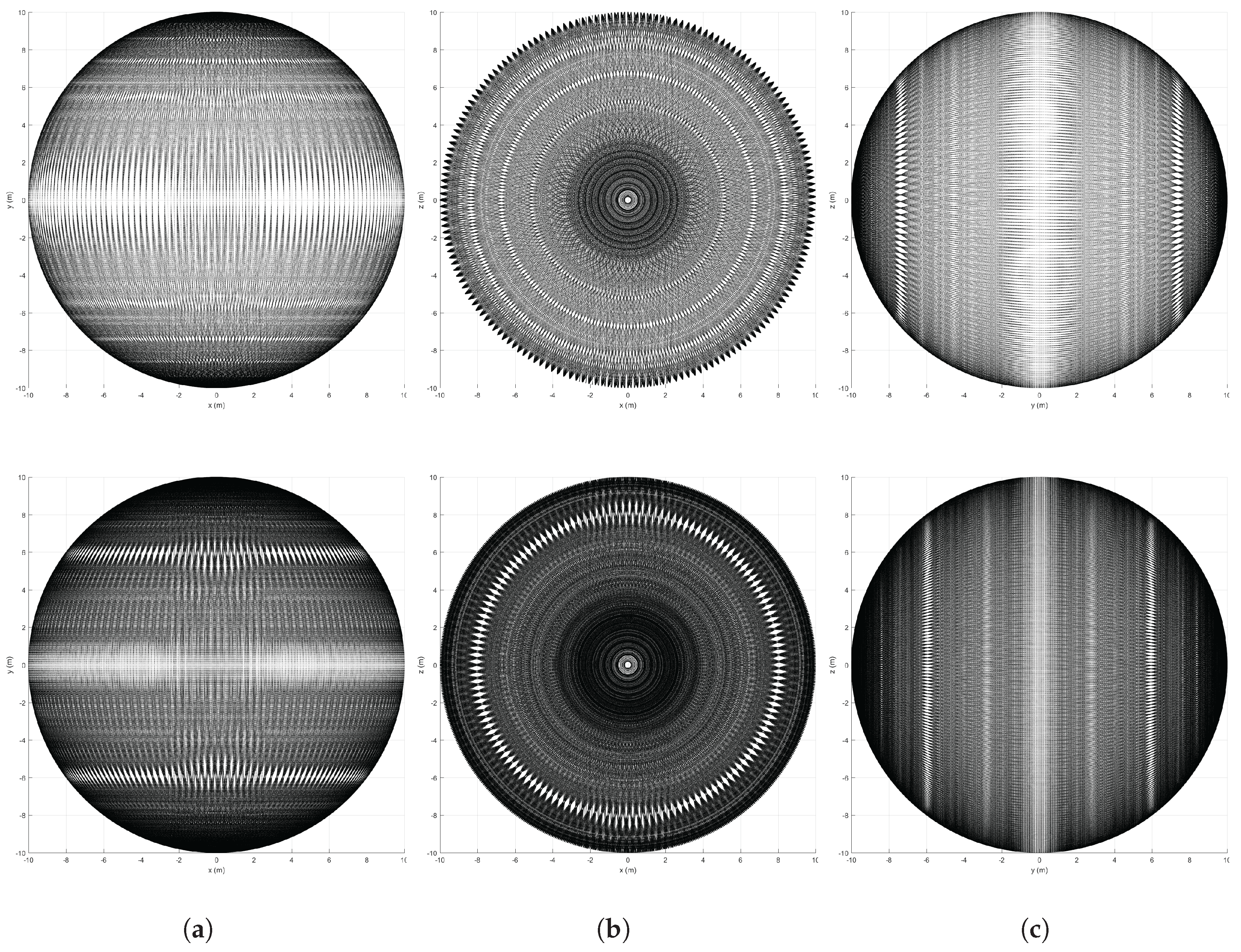
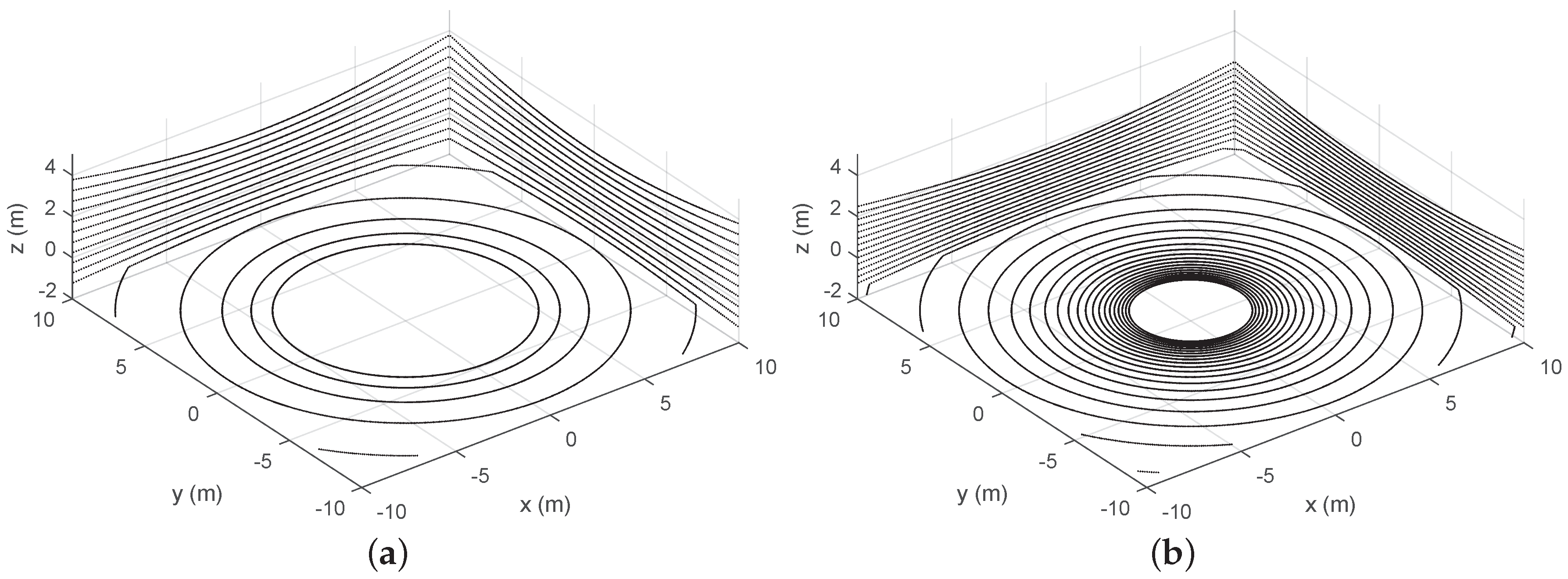
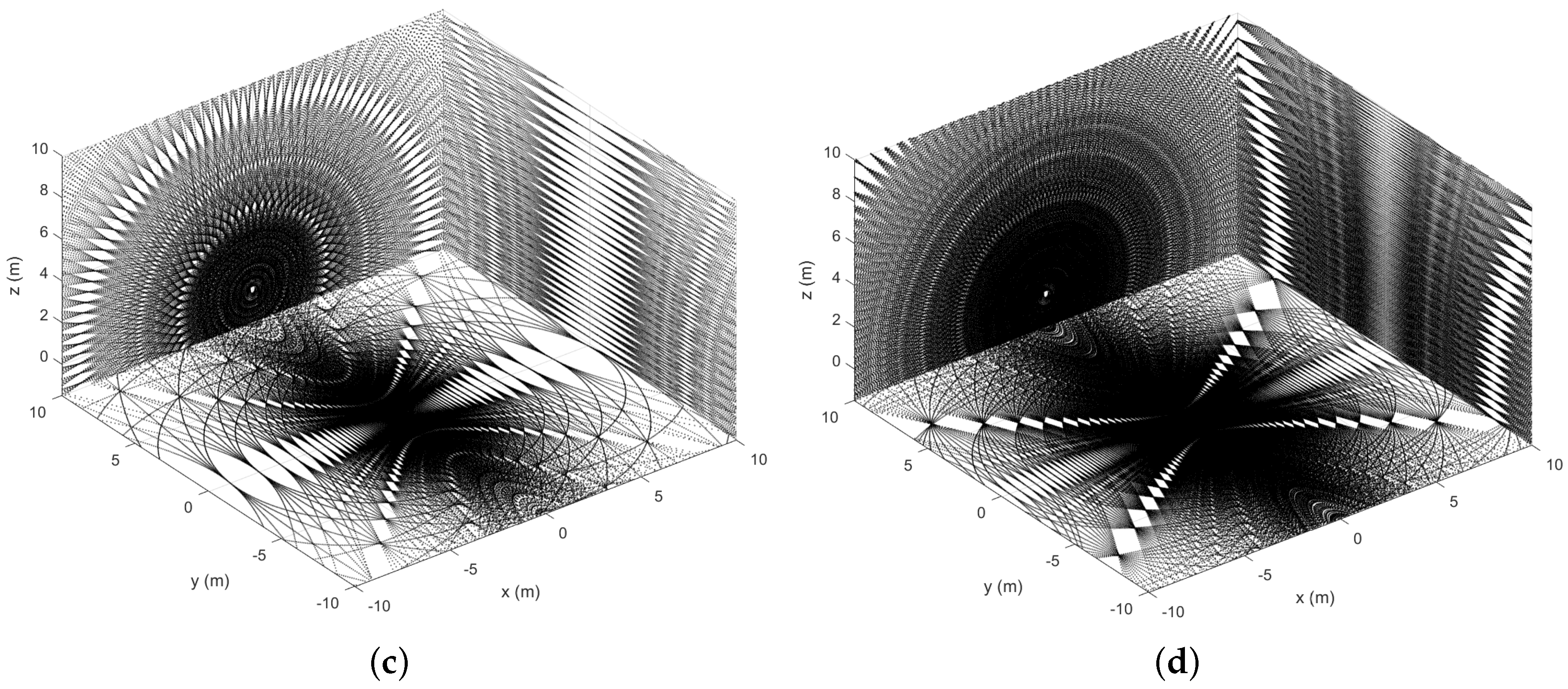
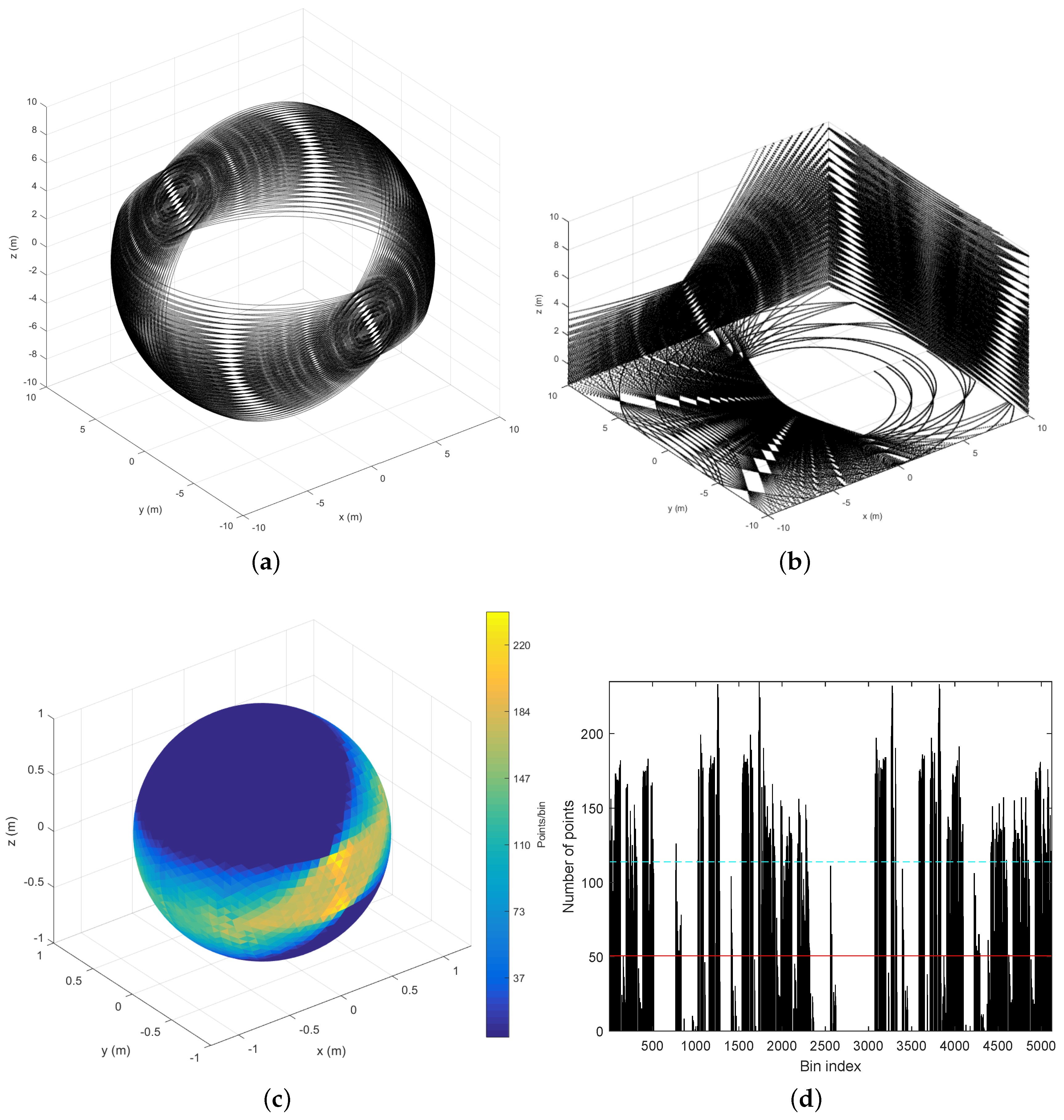
5.1. Qualitative Analysis
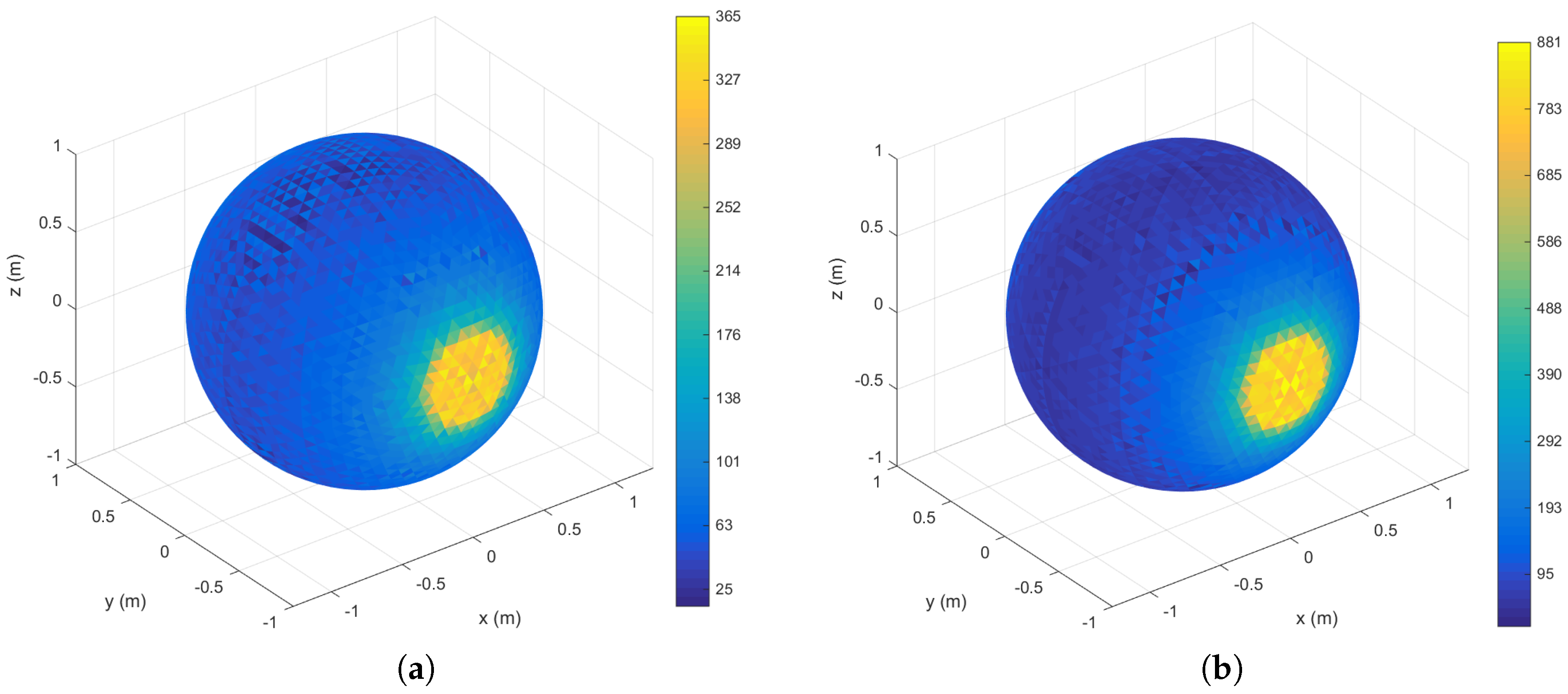
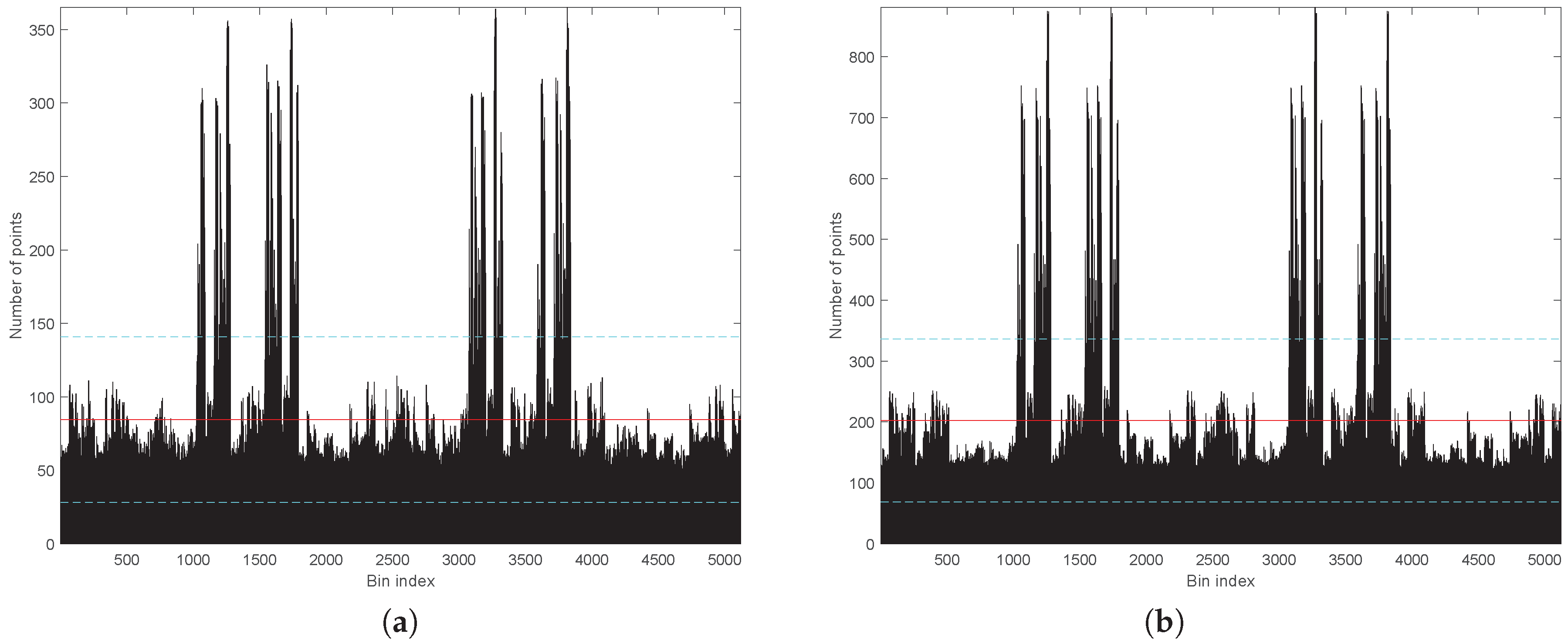
5.2. Sampling Density
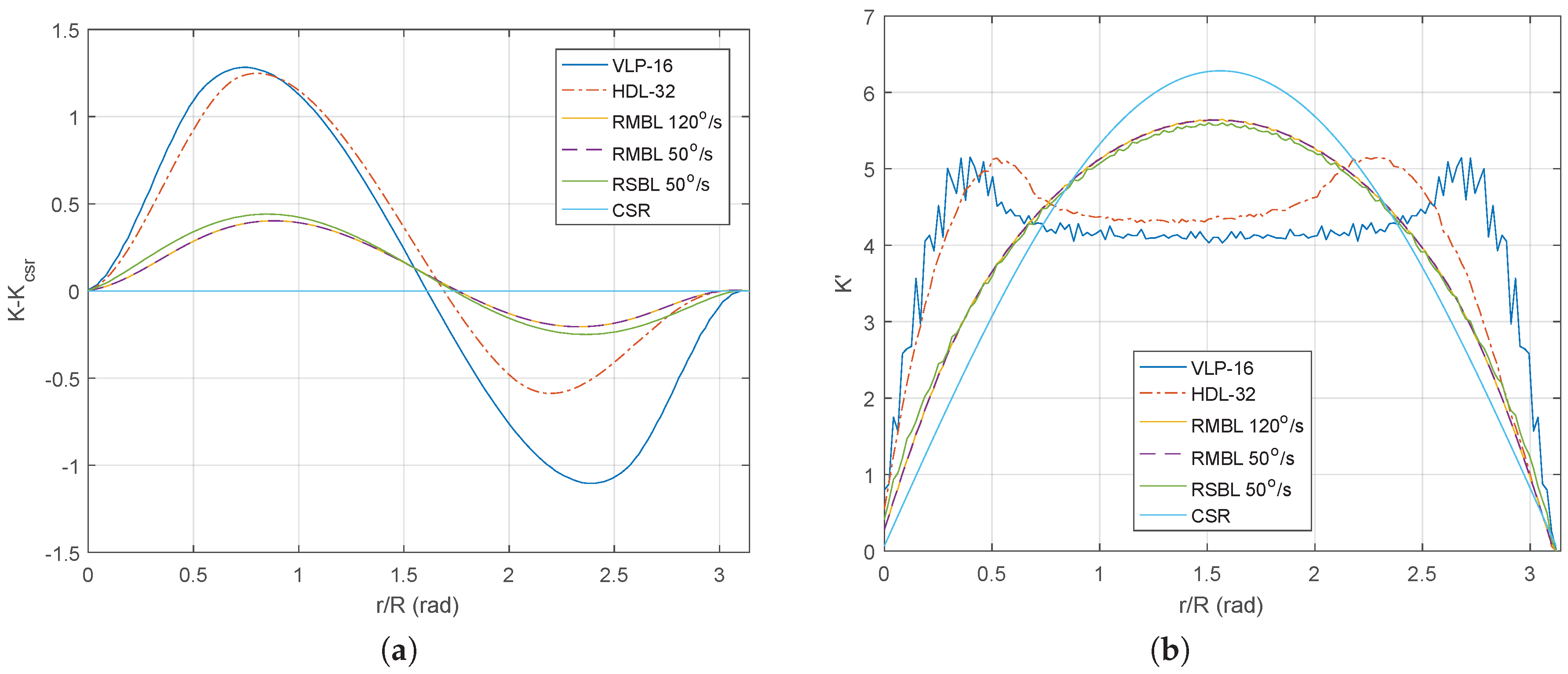
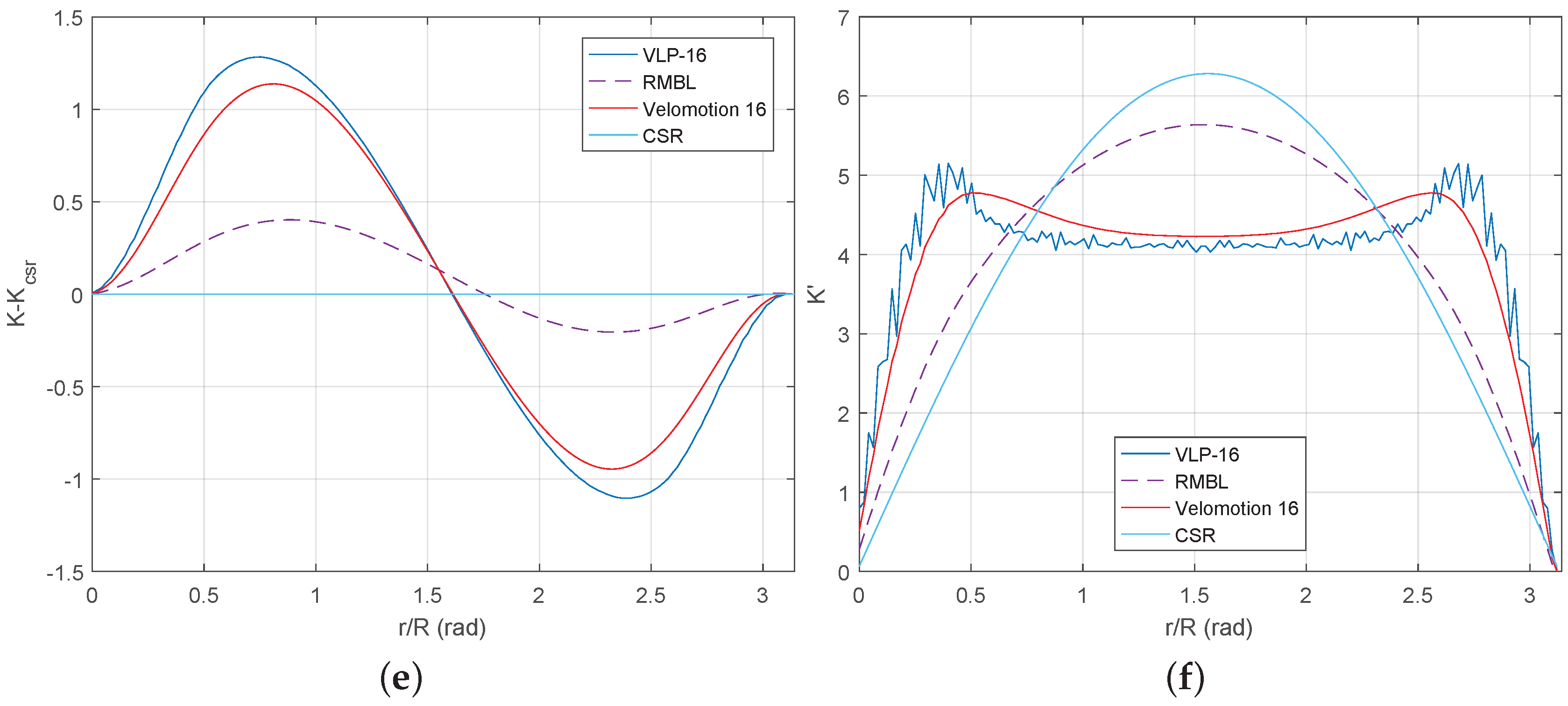
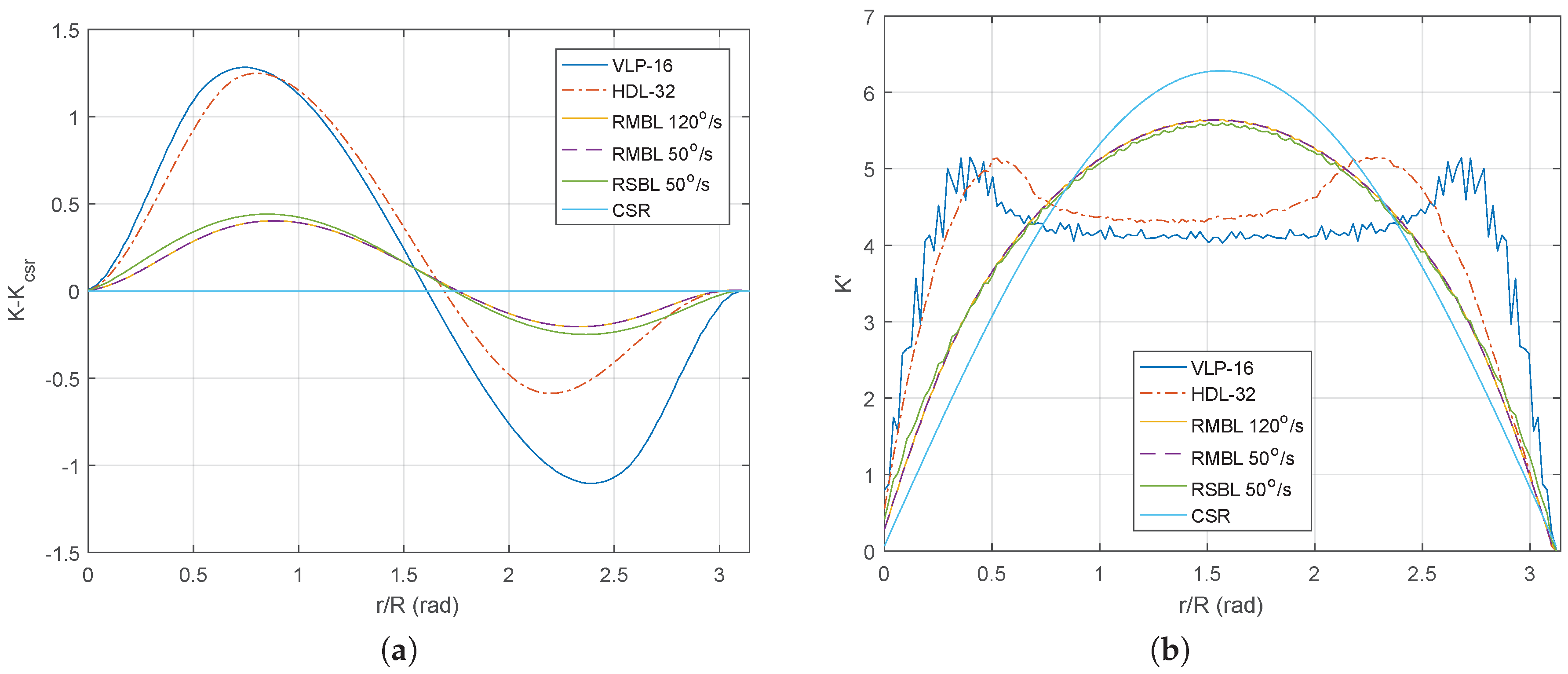
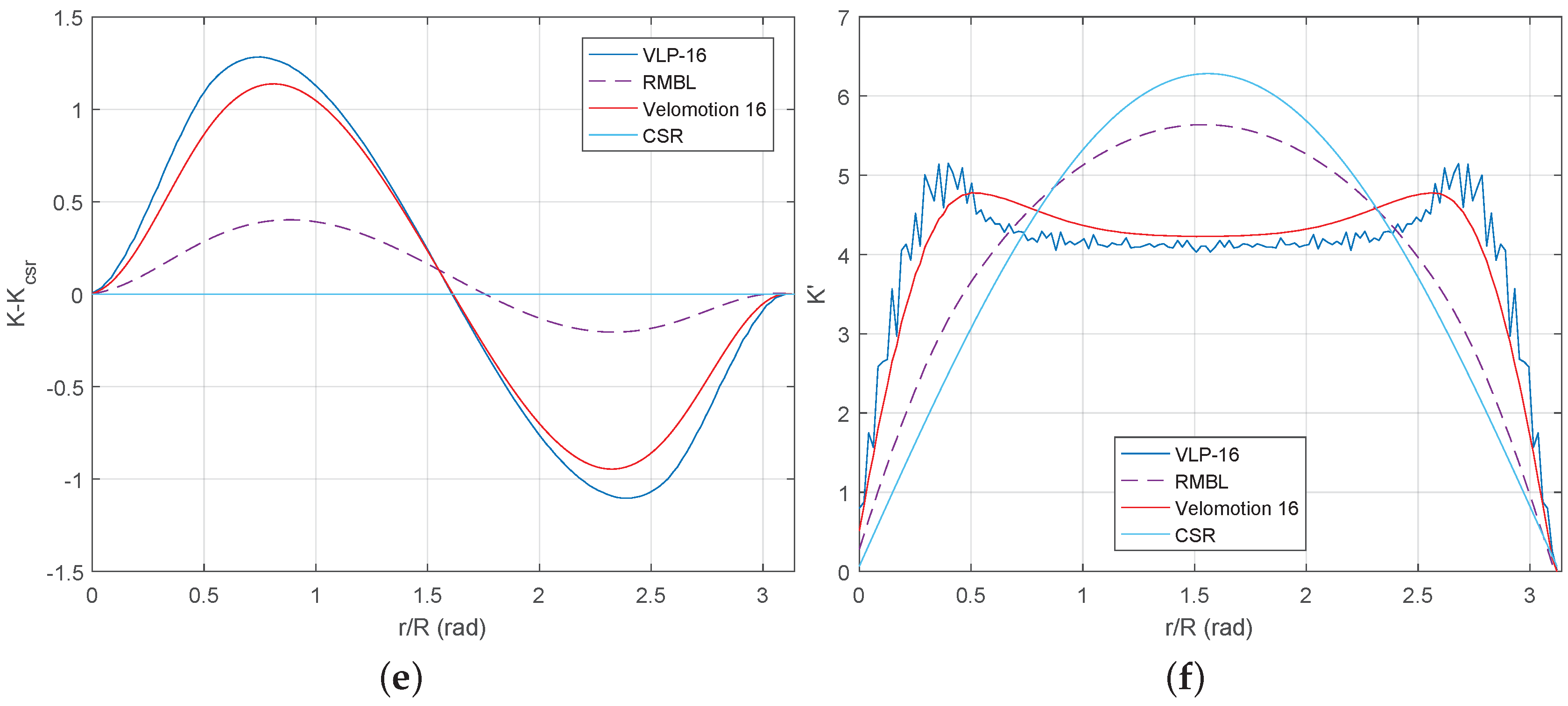
5.3. Spatial Distribution Analysis of Scan Data with the K Function
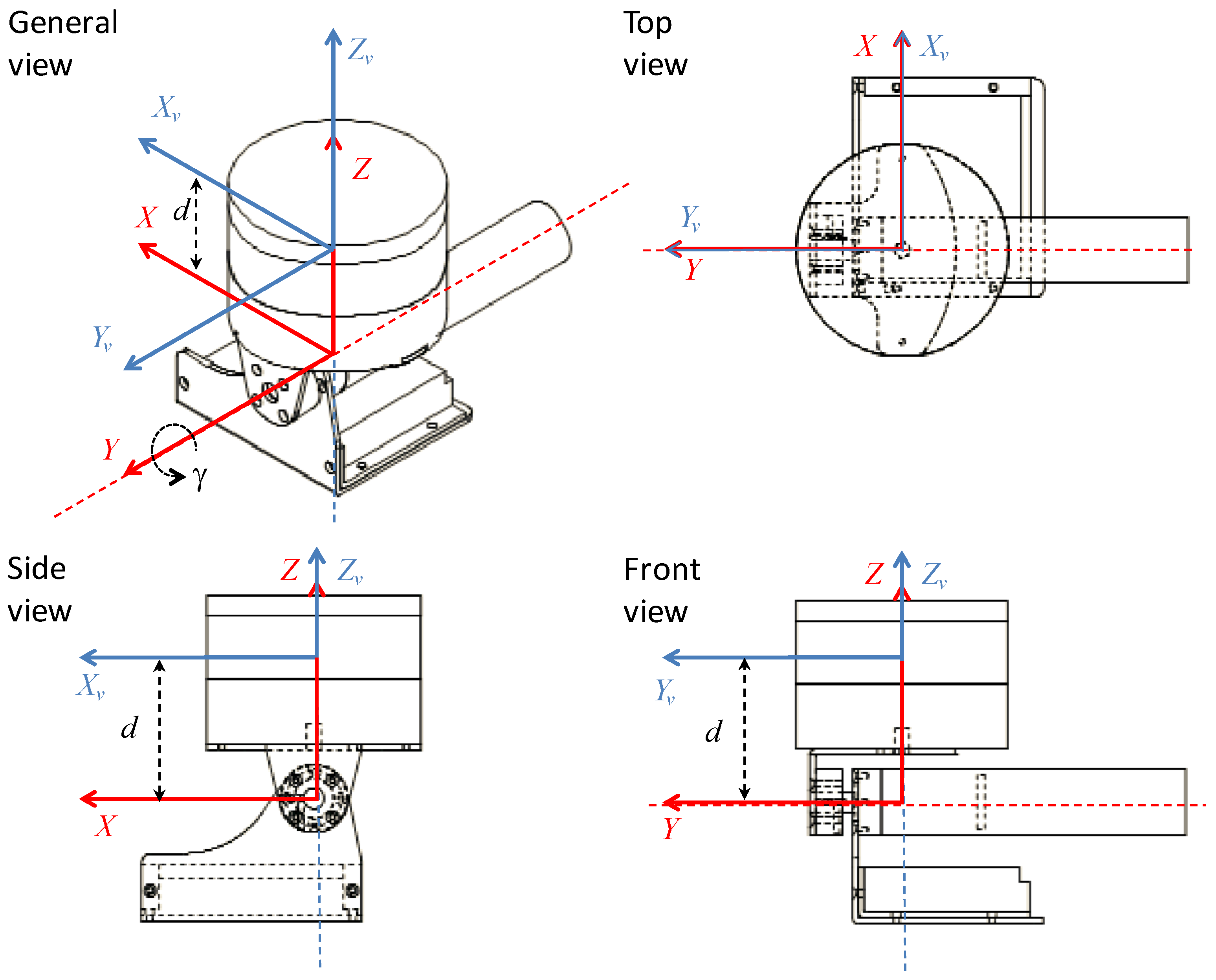
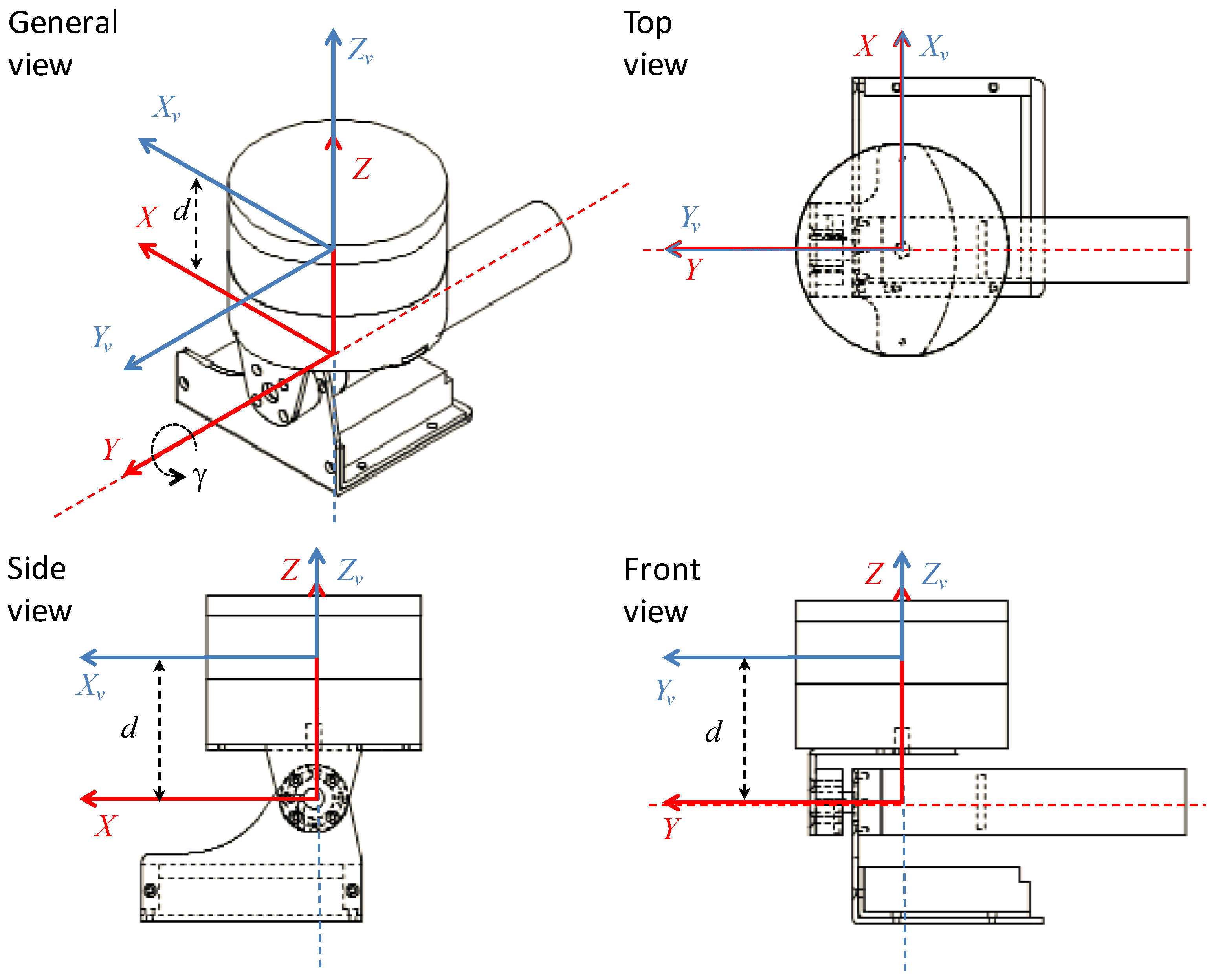
6. Implementation of a Portable Tilting Mechanism for a Velodyne VLP-16
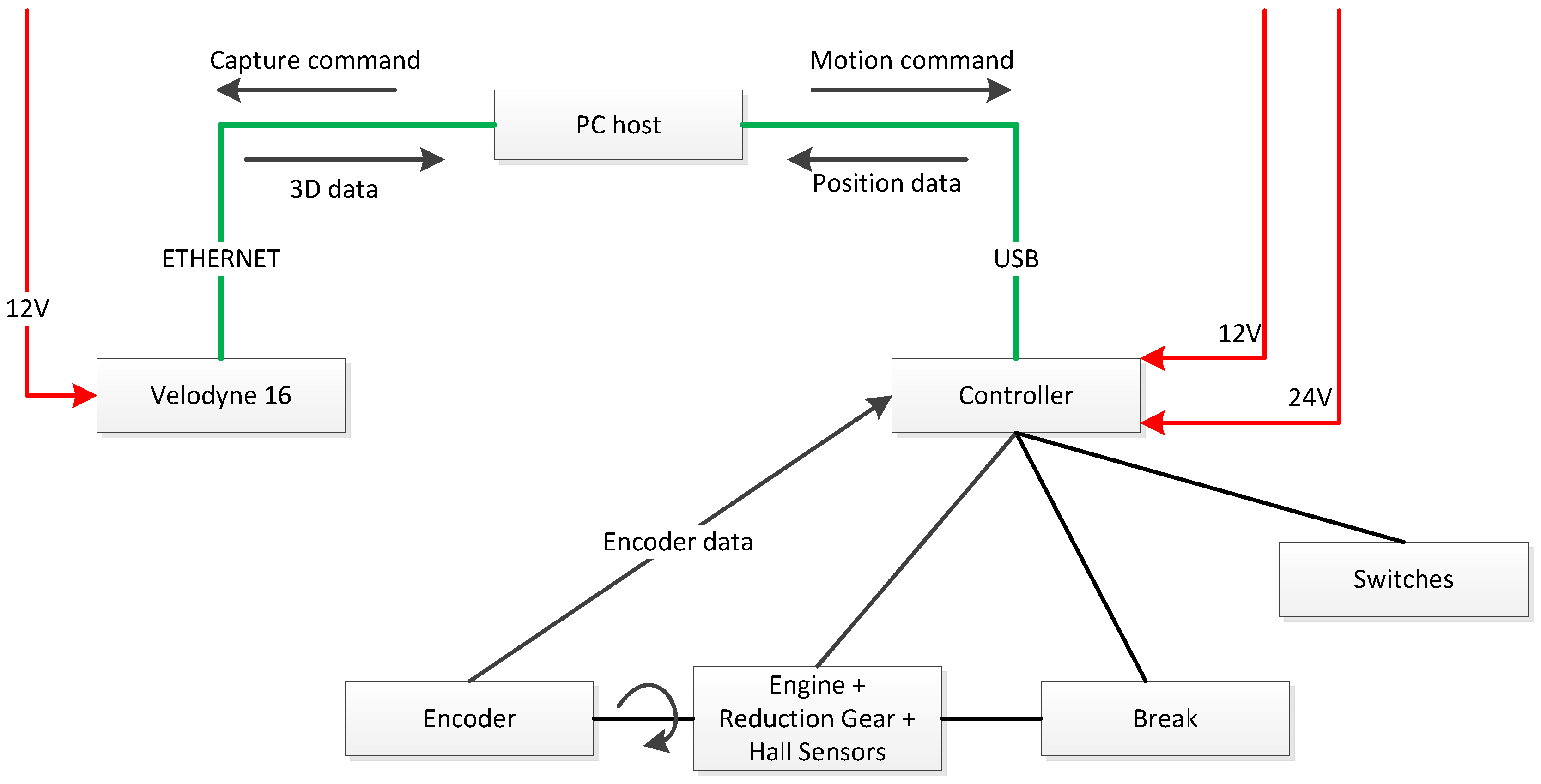
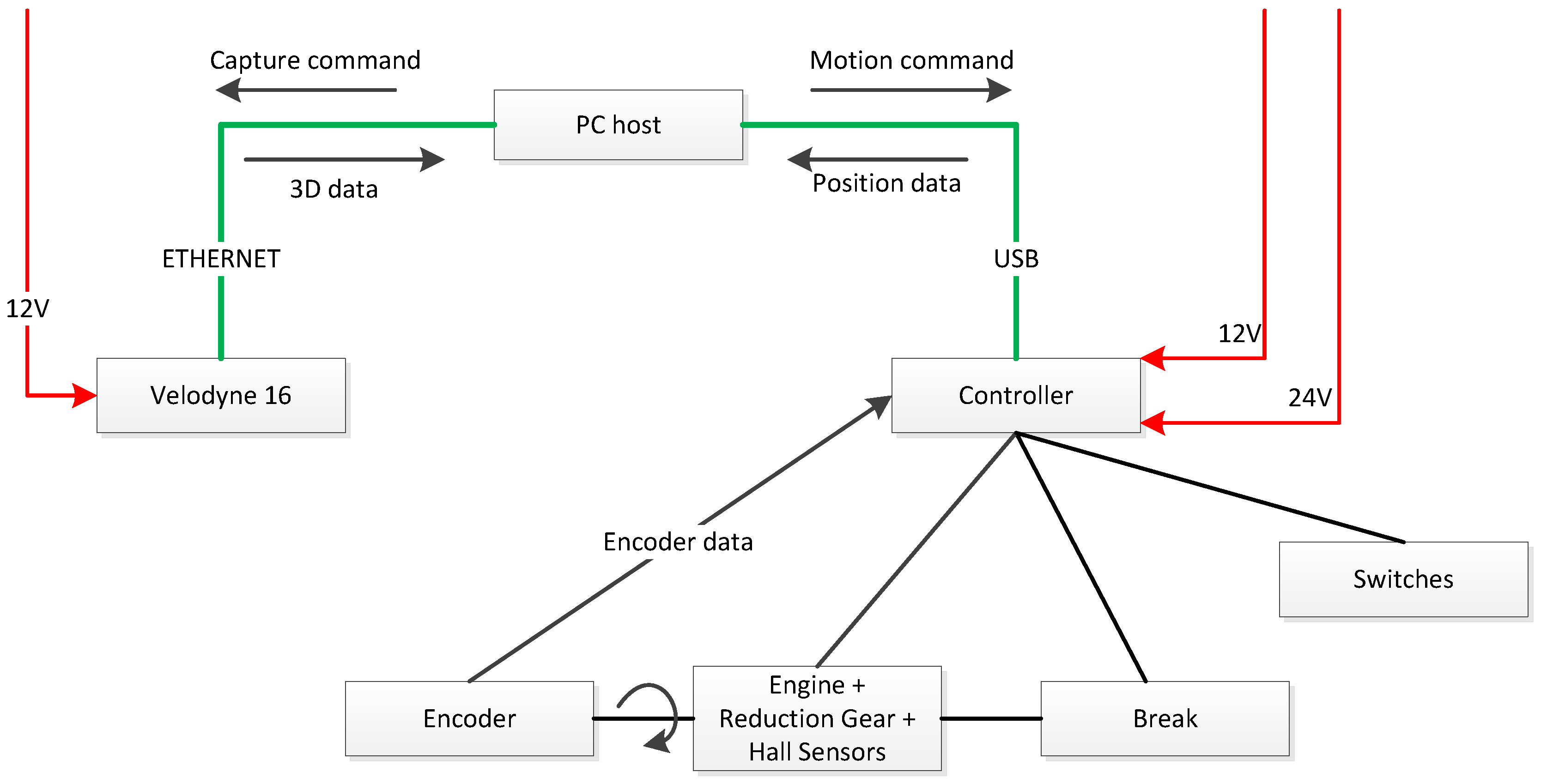
6.1. Velomotion-16 System Description
6.2. Analysis of the Scan Measurement Distribution for Velomotion-16
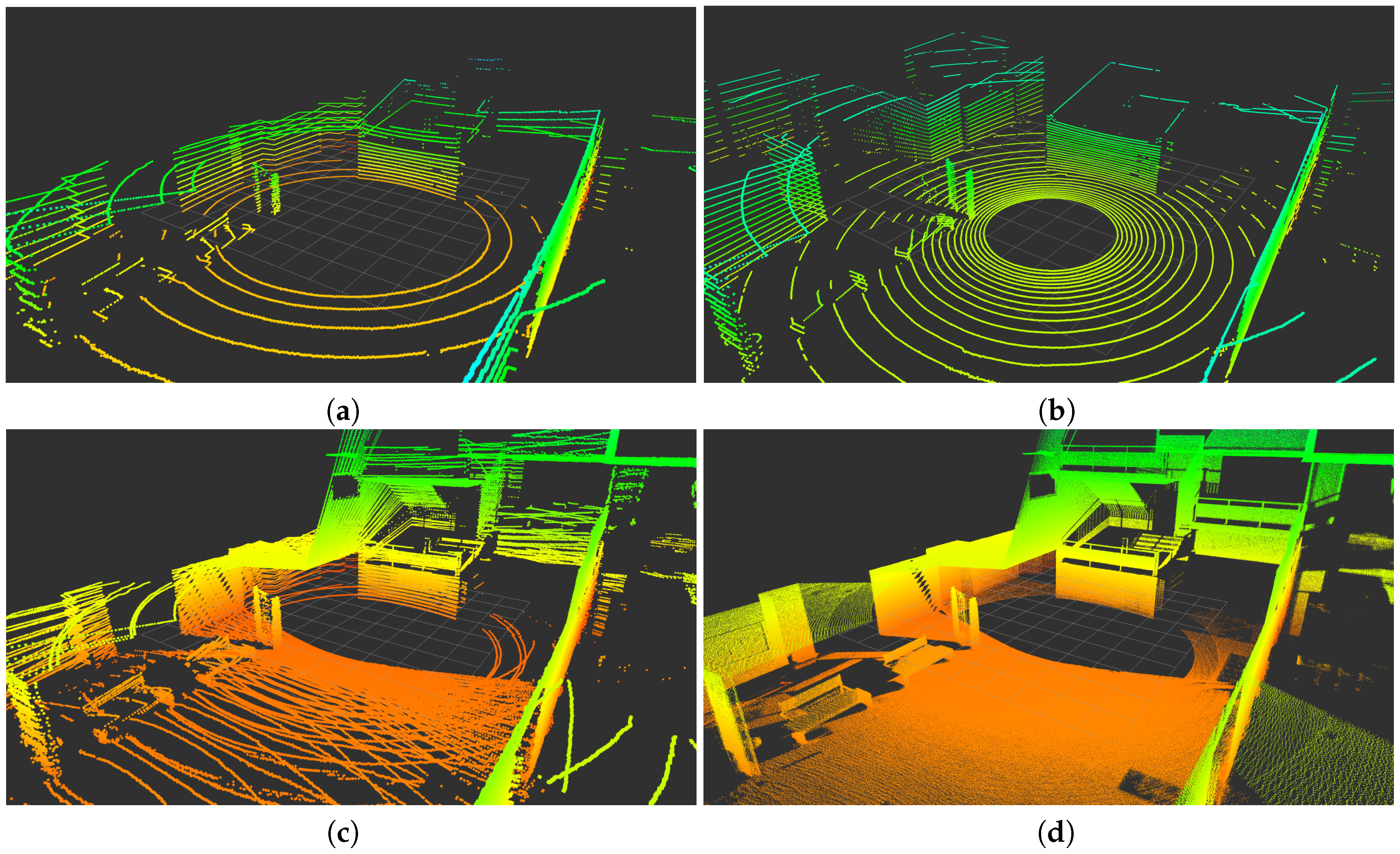
7. Discussion of Example Scans
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Omar, T.; Nehdi, M.L. Data acquisition technologies for construction progress tracking. Autom. Constr. 2016, 70, 143–155. [Google Scholar] [CrossRef]
- Yandun, F.; Reina, G.; Torres-Torriti, M.; Kantor, G.; Auat Cheein, F. A Survey of Ranging and Imaging Techniques for Precision Agriculture Phenotyping. IEEE/ASME Trans. Mechatron. 2017. [Google Scholar] [CrossRef]
- Chromy, A.; Zalud, L. Robotic 3D scanner as an alternative to standard modalities of medical imaging. SpringerPlus 2014, 3. [Google Scholar] [CrossRef] [PubMed]
- Benedek, C. 3D people surveillance on range data sequences of a rotating Lidar. Pattern Recognit. Lett. 2014, 50, 149–158. [Google Scholar] [CrossRef]
- Vitali, A.; Rizzi, C. A virtual environment to emulate tailor’s work. Comput.-Aided Des. Appl. 2017, 14, 671–679. [Google Scholar] [CrossRef]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Batavia, P.H.; Roth, S.A.; Singh, S. Autonomous coverage operations in semi-structured outdoor environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 743–749. [Google Scholar]
- Sheh, R.; Jamali, N.; Kadous, M.W.; Sammut, C. A low-cost, compact, lightweight 3D range sensor. In Proceedings of the Australasian Conference on Robotics and Automation, ACRA 2006, Auckland, New Zealand, 6–8 December 2006. [Google Scholar]
- Yoshida, T.; Irie, K.; Koyanagi, E.; Tomono, M. A sensor platform for outdoor navigation using gyro-assisted odometry and roundly-swinging 3D laser scanner. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1414–1420. [Google Scholar]
- Droeschel, D.; Schwarz, M.; Behnke, S. Continuous mapping and localization for autonomous navigation in rough terrain using a 3D laser scanner. Robot. Auton. Syst. 2017, 88, 104–115. [Google Scholar] [CrossRef]
- Velodyne LIDAR, Inc. Products. Available online: http://velodynelidar.com/products.html (accessed on 27 January 2018).
- Neumann, T.; Dülberg, E.; Schiffer, S.; Ferrein, A. A rotating platform for swift acquisition of dense 3D point clouds. In Proceedings of the International Conference on Intelligent Robotics and Applications, Wuhan, China, 16–18 August 2016; Volume 9834, pp. 257–268. [Google Scholar]
- Neumann, T.; Ferrein, A.; Kallweit, S.; Scholl, I. Towards a mobile mapping robot for underground mines. In Proceedings of the 2014 PRASA, RobMech and AfLaT International Joint Symposium, Cape Town, South Africa, 27–28 November 2014; pp. 279–284. [Google Scholar]
- Klamt, T.; Behnke, S. Anytime Hybrid Driving-Stepping Locomotion Planning. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 1–8. [Google Scholar]
- Wulf, O.; Wagner, B. Fast 3D Scanning Methods for Laser Measurement Systems. In Proceedings of the International Conference on Control Systems and Computer Science, Bucharest, Romania, 2–5 July 2003; Volume 1, pp. 312–317. [Google Scholar]
- Ripley, B.D. Modelling Spatial Patterns. J. R. Stat. Soc. Ser. B Methodol. 1977, 39, 172–212. [Google Scholar]
- Robeson, S.M.; Li, A.; Huang, C. Point-pattern analysis on the sphere. Spatial Stat. 2014, 10, 76–86. [Google Scholar] [CrossRef]
- Weingarten, J.; Siegwart, R. 3D SLAM using planar segments. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 3062–3067. [Google Scholar]
- Dias, P.; Matos, M.; Santos, V. 3D reconstruction of real world scenes using a low-cost 3D range scanner. Comput.-Aided Civ. Infrastruct. Eng. 2006, 21, 486–497. [Google Scholar] [CrossRef]
- Ueda, T.; Kawata, H.; Tomizawa, T.; Ohya, A. Mobile SOKUIKI Sensor System-Accurate Range Data Mapping System with Sensor Motion. In Proceedings of the International Conference on Autonomous Robots and Agents, Palmerston North, New Zealand, 12–14 December 2006. [Google Scholar]
- Morales, J.; Martínez, J.L.; Mandow, A.; Pequeño-Boter, A.; García-Cerezo, A. Design and development of a fast and precise low-cost 3D laser rangefinder. In Proceedings of the IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; pp. 621–626. [Google Scholar]
- Xiao, J.; Zhang, J.; Adler, B.; Zhang, H.; Zhang, J. Three-dimensional point cloud plane segmentation in both structured and unstructured environments. Robot. Auton. Syst. 2013, 61, 1641–1652. [Google Scholar] [CrossRef]
- Morales, J.; Martínez, J.L.; Mandow, A.; Reina, A.J.; Pequeño Boter, A.; García-Cerezo, A. Boresight Calibration of Construction Misalignments for 3D Scanners Built with a 2D Laser Rangefinder Rotating on Its Optical Center. Sensors 2014, 14, 20025–20040. [Google Scholar] [CrossRef] [PubMed]
- Alismail, H.; Browning, B. Automatic Calibration of Spinning Actuated Lidar Internal Parameters. J. Field Robot. 2015, 32, 723–747. [Google Scholar] [CrossRef]
- An, S.Y.; Lee, L.K.; Oh, S.Y. Line segment-based fast 3D plane extraction using nodding 2D laser rangefinder. Robotica 2015, 33, 1751–1774. [Google Scholar] [CrossRef]
- Martínez, J.L.; Morales, J.; Reina, A.J.; Mandow, A.; Pequeño-Boter, A.; García-Cerezo, A. Construction and calibration of a low-cost 3D laser scanner with 360 degrees field of view for mobile robots. In Proceedings of the IEEE International Conference on Industrial Technology, Seville, Spain, 17–19 March 2015; pp. 149–154. [Google Scholar]
- Özbay, B.; Kuzucu, E.; Gül, M.; Öztürk, D.; Taşci, M.; Arisoy, A.M.; Şirin, H.O.; Uyanik, I. A high frequency 3D LiDAR with enhanced measurement density via Papoulis-Gerchberg. In Proceedings of the International Conference on Advanced Robotics, ICAR 2015, Istanbul, Turkey, 27–31 July 2015; pp. 543–548. [Google Scholar]
- Moon, Y.G.; Go, S.J.; Yu, K.H.; Lee, M.C. Development of 3D laser range finder system for object recognition. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Busan, Korea, 7–11 July 2015; pp. 1402–1405. [Google Scholar]
- Shaukat, A.; Blacker, P.C.; Spiteri, C.; Gao, Y. Towards camera-LIDAR fusion-based terrain modelling for planetary surfaces: Review and analysis. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Schubert, S.; Neubert, P.; Protzel, P. How to build and customize a high-resolution 3D laserscanner using off-the-shelf components. In Proceedings of the Conference Towards Autonomous Robotic Systems, Guildford, UK, 19–21 July 2016; Volume 9716, pp. 314–326. [Google Scholar]
- Leingartner, M.; Maurer, J.; Ferrein, A.; Steinbauer, G. Evaluation of Sensors and Mapping Approaches for Disasters in Tunnels. J. Field Robot. 2016, 33, 1037–1057. [Google Scholar] [CrossRef]
- Kang, J.; Doh, N.L. Full-DOF Calibration of a Rotating 2-D LIDAR with a Simple Plane Measurement. IEEE Trans. Robot. 2016, 32, 1245–1263. [Google Scholar] [CrossRef]
- Velodyne LIDAR, Inc. Datasheets. Available online: http://velodynelidar.com/docs/datasheet/ (accessed on 27 January 2018).
- Vlaminck, M.; Luong, H.; Goeman, W.; Philips, W. 3D scene reconstruction using Omnidirectional vision and LiDAR: A hybrid approach. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Atanacio-Jiménez, G.; González-Barbosa, J.J.; Hurtado-Ramos, J.B.; Ornelas-Rodríguez, F.J.; Jiménez-Hernández, H.; García-Ramirez, T.; González-Barbosa, R. LIDAR velodyne HDL-64E calibration using pattern planes. Int. J. Adv. Robot. Syst. 2011, 8, 70–82. [Google Scholar] [CrossRef]
- Chen, C.Y.; Chien, H.J. On-site sensor recalibration of a spinning multi-beam LiDAR system using automatically-detected planar targets. Sensors 2012, 12, 13736–13752. [Google Scholar] [CrossRef] [PubMed]
- Chan, T.O.; Lichti, D.D. Automatic In Situ calibration of a spinning beam LiDAR system in static and kinematic modes. Remote Sens. 2015, 7, 10480–10500. [Google Scholar] [CrossRef]
- Glennie, C.L.; Kusari, A.; Facchin, A. Calibration and stability analysis of the VLP-16 laser scanner. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Prague, Czech Republic, 12–19 July 2016; Volume 40, pp. 55–60. [Google Scholar]
- Mandow, A.; Martínez, J.; Reina, A.; Morales, J. Fast range-independent spherical subsampling of 3D laser scanner points and data reduction performance evaluation for scene registration. Pattern Recognit. Lett. 2010, 31, 1239–1250. [Google Scholar] [CrossRef]
- Tonini, M.; Abellan, A. Rockfall detection from terrestrial lidar point clouds: A clustering approach using R. J. Spatial Inf. Sci. 2014, 8, 95–110. [Google Scholar] [CrossRef]
- Baumgardner, J.R.; Frederickson, P.O. Icosahedral discretization of the two-sphere. SIAM J. Numer. Anal. 1985, 22, 1107–1115. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Device | Major Application | |
|---|---|---|---|
| Batavia 2002 [7] | RSBL | Sick | Obstacle detection |
| Wulf 2003 [15] | RSBL | Sick LMS200 | Density analysis |
| Weingarten 2006 [18] | RSBL | (2) Sick LMS200 | Indoor scenario reconstruction |
| Dias 2006 [19] | RSBL | Sick LMS200 | Device comparison |
| Sheh 2006 [8] | RSBL | Hokuyo URG-04LX | Sensor configuration analysis |
| Ueda 2006 [20] | RSBL | Hokuyo URG-04LX | Mapping |
| Yoshida 2010 [9] | RSBL | Hokuyo UTM-30LX | Mapping |
| Morales 2011 [21] | RSBL | Hokuyo UTM-30LX | Mapping and environment modeling |
| Xiao 2013 [22] | RSBL | Hokuyo UTM-30LX | Indoor mobile robot |
| Neumann 2014 [13] | RMBL | Velodyne HDL-64E | Underground mapping |
| Morales 2014 [23] | RSBL | Hokuyo UTM-30LX | Boresight calibration |
| Alismail 2015 [24] | RSBL | Hokuyo UTM-30LX-EX | Calibration for 3D mapping |
| An 2015 [25] | RSBL | Hokuyo URG-30LX | Plane extraction from indoor robot |
| Martinez 2015 [26] | RSBL | Hokuyo UTM-30LX-EX | UGV and UAV environment modeling |
| Özbay 2015 [27] | RSBL | Hokuyo UTM-30LX | UGV obstacle modeling |
| Moon 2015 [28] | RSBL | SICK LMS511-pro | Cargo ship modeling |
| Shaukat 2016 [29] | RSBL | Hokuyo UTM-30LX | RGB-D terrain modelling |
| Schubert 2016 [30] | RSBL | Hokuyo UTM-30LX | Robot mapping |
| Leingartner 2016 [31] | RMBL | Velodyne HDL-64E | Mapping |
| Neumann 2016 [12] | RSBL | Hokuyo UTM-30LX-EW | RMBL and MBL comparison |
| RMBL | and Velodyne VLP-16 | ||
| Kang 2016 [32] | RSBL | Hokuyo UTM-30LX | 6 DOF calibration |
| Droeschel 2017 [10] | RSBL | Hokuyo UTM-30LX-EW | Robot mapping |
| Klamt 2017 [14] | RMBL | Velodyne VLP-16 | Robot mapping |
| VLP-16 | HDL-32 | |
|---|---|---|
| Laser/detector pairs | 16 | 32 |
| Range | 1 m to 100m | 1 m to 70 m |
| Accuracy | ±3 cm | ± 2 cm |
| Data | Distance/Calibrated reflectivities | Distance/Calibrated reflectivities |
| Data Rate | 300,000 points/s | 700,000 points/s |
| Vertical FOV | ||
| Vertical Resolution | 2.0° | 1.33° |
| Horizontal FOV | 360° | 360° |
| Horizontal Resolution | 0.1° to 0.4° (programmable) | 0.08° to 0.35° (programmable) |
| Size | 103 mm × 72 mm | 85.3 mm × 149.9 mm |
| Weight | 0.83 Kg | 1.3 Kg |
| Range | 1 m to 100 m (VLP-16) + offset |
| Accuracy | ±3 cm (VLP-16) |
| Data Rate | 300,000 points/s (VLP-16) |
| d | 6 cm |
| Tilting range | |
| Tilting speed | 0.05°/s to 56.25°/s (programmable) |
| Vertical FOV | (forwards), (backwards) |
| Vertical Resolution | uneven |
| Mean vertical resolution | 5.2° to 0.59° (programmable) |
| Horizontal FOV | 360° (VLP-16) |
| Horizontal Resolution | 0.1° to 0.4° (programmable) (VLP-16) |
| Size | 105 mm width × 95 mm height × 165 mm depth |
| Weight | 1.9 kg (+0.7 kg wires) |
| Scan Time (s) | Speed (°/s) | Indoor: Points | Urban: Points | Terrain: Points | |
|---|---|---|---|---|---|
| Velomotion-16 (slow) | 42.05 | 1.07 | 11,348,103 | 6,833,873 | 6,269,304 |
| Velomotion-16 (fast) | 0.80 | 56.25 | 201,851 | 158,351 | 125,237 |
| VLP-16 | 0.10 | - | 27,998 | 20,141 | 16,954 |
| HDL-32 | 0.10 | - | 68,080 | 58,875 | 51,362 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morales, J.; Plaza-Leiva, V.; Mandow, A.; Gomez-Ruiz, J.A.; Serón, J.; García-Cerezo, A. Analysis of 3D Scan Measurement Distribution with Application to a Multi-Beam Lidar on a Rotating Platform. Sensors 2018, 18, 395. https://doi.org/10.3390/s18020395
Morales J, Plaza-Leiva V, Mandow A, Gomez-Ruiz JA, Serón J, García-Cerezo A. Analysis of 3D Scan Measurement Distribution with Application to a Multi-Beam Lidar on a Rotating Platform. Sensors. 2018; 18(2):395. https://doi.org/10.3390/s18020395
Chicago/Turabian StyleMorales, Jesús, Victoria Plaza-Leiva, Anthony Mandow, Jose Antonio Gomez-Ruiz, Javier Serón, and Alfonso García-Cerezo. 2018. "Analysis of 3D Scan Measurement Distribution with Application to a Multi-Beam Lidar on a Rotating Platform" Sensors 18, no. 2: 395. https://doi.org/10.3390/s18020395