1. Introduction
Alpine areas are shaped by interacting morphogenetic processes [
1,
2]. Their activity depends on local environmental conditions, such as geological structure, relief, topoclimate, and the spatial reach of altitudinal zones [
1]. Avalanches [
3,
4], landslides [
5], and debris flows [
6] are typical processes in alpine areas. They are the main cause of transformation of mountainous area landscapes in the world [
7,
8]. The Tatras slopes are being modelled by debris flows, mud-debris flows, and torrential flows, also by soil material flushing, rill erosion, nivation, solifluction, creep, aeolian processes, and the effects caused by needle ice [
1,
9]. These processes transform the Tatra slopes with varying intensity and their effects are differentiated in time and space.
An additional factor that increases the activity of erosive processes in high mountains is hiking [
10,
11,
12]. The anthropogenic degradation on hiking trails on slopes is currently the subject of research, both in Poland [
13,
14] and worldwide [
15,
16,
17].
In order to determine the effects of anthropogenic degradation on hiking trails it is necessary to examine the tourist flow and its spatial and temporal distribution. To this end, different methods were used. They include counting the number of tourists by people trained for this purpose [
12], registration of tourists using the video system [
18] or the use of pyroelectric sensors to accurately determine the distribution of tourist movements [
19].
The effects of tourism are easily visible in the relief of hiking trails and paths and appear as various landforms created by erosion, denudation, or accumulation processes. Traditional methods of relief measurements include geomorphological mapping at various scales, test points, and surveys in slope catenas. The dynamics of the processes is typically determined with simple measurement techniques, such as a line of pegs driven into the ground at different depths, lines of marked debris to measure cover movements, nets to catch material falling off the rock walls, and instruments to measure the size of lifting [
20]. Currently, surveying methods are used in topography. They cover traditional measurement techniques, such as satellite measurements [
21] or total stations. They supply accurate and discrete data about the relief. Unfortunately, they are time-consuming and, therefore, they are used for small areas. In turn, remote sensing methods, such as terrestrial (TLS) and airborne laser scanning (ALS) [
22,
23], aerial and terrestrial photogrammetry [
24,
25], and satellite imaging, enable surveying large areas and provide quasi-continuous data. Their drawback is their high price. Despite this fact, they are increasingly being used in geomorphology and facilitate the acquisition of rich collections of data, with varying precision and detail.
Recently, UAVs, which are used to obtain spatial data, have become quite popular. Currently, the most common sensors installed on UAVs are non-metric cameras. However, devices equipped with infrared cameras, multi-spectral cameras, or light detection and ranging (LIDAR) scanners are becoming more and more popular [
26,
27]. Depending on the type of the flying unit, the UAV enables performing measurements over the areas ranging from a few acres to several square kilometres [
28,
29,
30]. It is worth noting that this new and very popular method of spatial data acquisition ensures the required measurement accuracy. Ground sampling distance (GSD) is of crucial importance here. It depends mainly on the flight level and the camera sensors and lenses used to take measurements. The second important aspect is to provide the final products with georeference data. Currently, mainly ground points measured with traditional survey techniques are used for this purpose. There are also other solutions, such as the use of point coordinates obtained from other sources, for example, from satellite images [
28]. Georeference information can be also supplied directly by measuring exact coordinates of images’ projection centres. Such solutions are typically used in situations when the UAV is fitted with a satellite receiver which determines the UAV position in real time, and with inertial navigation systems (INS) [
31,
32].
Another factor which affects the accuracy of results obtained from the UAV data is topography of the area, which is the subject of this research. Most publications indicate that products generated by UAV flights are verified with satellite measurement methods (in the kinematic or static mode), tacheometry, and TLS. It is worth noting that, in many cases, both the products obtained from UAV and TLS data are burdened with the influence of vegetation, which negatively affects the quality of both datasets (from the UAV and TLS) [
33]. Therefore, TLS is not always a reliable method for referential data acquisition. Taking this into account, analyses that rely on independent classical measurements (total station, satellite measurements) should be considered as more reliable [
34]. In the areas where the landscape is not very diversified (flat areas) [
35,
36] the accuracy of the final products approximate 2–3 GSD [
29,
37]. However, according to our best knowledge, no studies have been conducted so far to determine the accuracy of UAV-based photogrammetric products in areas of such large height differences. The relative height differences of the area being subject to the tests described in this article are up to 1000 m.
Despite the fact that photogrammetric measurements taken from low levels have lower accuracies than the data obtained from TLS, their great advantages include even distribution of survey points in the study area, less effort needed to acquire data, and a lower price of the equipment. Considering the products generated during UAV flights (digital elevation models (DEM), orthophotomosaics), UAVs may be widely applied to monitor landslides [
34,
38,
39,
40,
41], soil and slope erosion [
29,
42,
43], and to measure seashores in order to check the evolution of beaches and cliffs [
44,
45,
46]. It is worth noting that one may come across publications that suggest using UAVs for periodic monitoring of landslides and TLS for measuring large deformations of objects that occur after extreme events [
41]. UAV surveys also find applications in vegetation monitoring [
47], precision agriculture enhancement [
48], information acquisition concerning damage caused by natural disasters [
49,
50], geological surveys [
51], and visual investigation of large-scale structures, such as dams [
52].
There are a variety of photogrammetric software tools available for UAV-based data. The use of web services and software packages that “automatically generate 3D points from arbitrary image configurations” was examined by Neitzel and Klonowski [
53]. Vallet et al. [
54] compared georeferenced DTMs produced from Pix4D and NGATE (in SOCET SET). The objective of the study presented in [
55] is to investigate the level of accuracy that can be achieved using two of these software tools: Agisoft PhotoScan Pro and an open-source alternative, IGN MicMac, in sub-optimal survey conditions. On the basis of these studies, it can be concluded that the applied software influences the obtained results.
The most important aim of the research described in this article was to document the selected linear hiking trails in the Western Tatras between the lower subalpine zones and alpine glades. The current state of the trails was established using the photogrammetric method (UAV), whose accuracy was verified with other surveying methods (measurement of control profiles, TLS). The data obtained, after comparing them with archival data provided by the TNP (or data obtained in successive measurement series) comprise valuable information which enables, for example, the examination of the trails’ erosion degree, the progress of forest succession, and the impact of anthropogenic denudation on tree line changes.
The outcome of the work comprise digital surface models (DSM) and/or digital terrain models (DTM) in two periods: primary and secondary. The current model was created on the basis of data obtained with the use of a UAV. The data for the creation of the original model came from ALS and was supplied by the TNP. It is worth noting that in the longer perspective, the follow-up measurements in the same area will facilitate a more in-depth analysis of the impact that tourism has on the environment.
2. Materials and Methods
2.1. Study Site
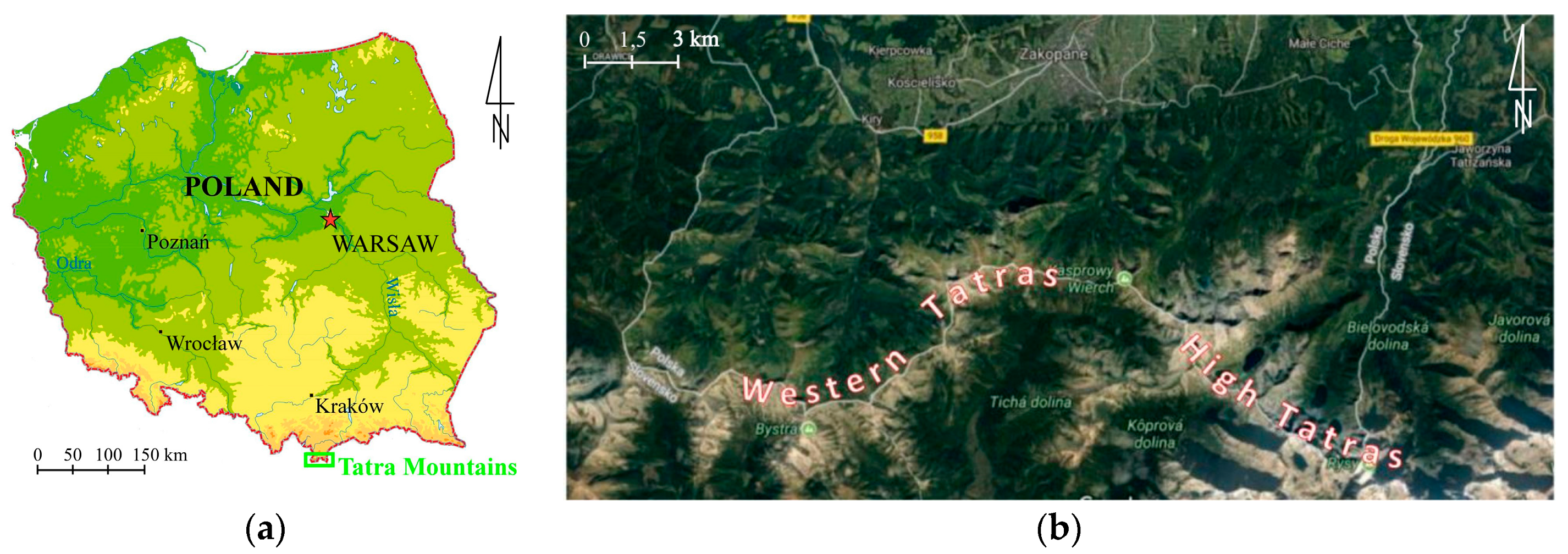
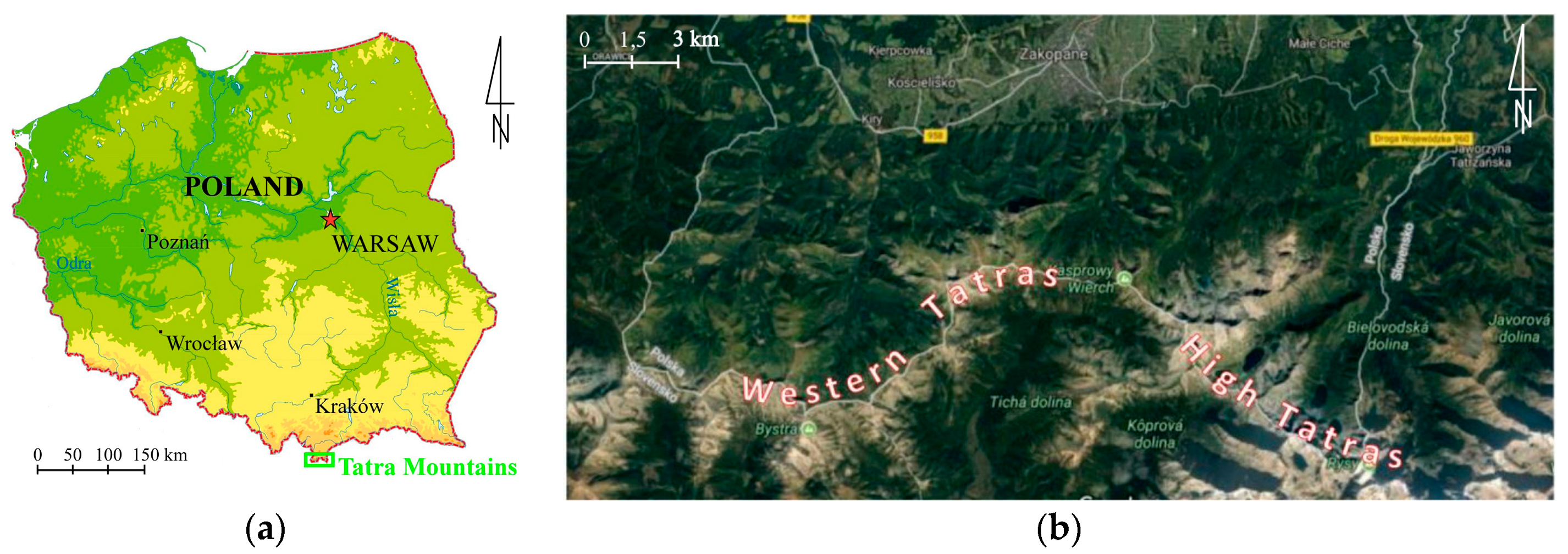
Research described in this article was conducted in the Tatra National Park, which is situated in the southern part of Poland (
Figure 1). The Tatras comprise the only alpine area in Poland. Due to outstanding natural features of this area, the national park was founded here in 1955. It is one of the largest national parks in Poland with the total area of 21,197 ha [
56]. In comparison to other national parks in Europe it is a relatively small park.
The TNP is one of the most visited parks in Poland. It is visited by 3.5 million tourists annually [
56]. It is also one of the most visited parks in Europe. In comparison, alpine parks are visited on average by 700,000 tourists every year [
57]. Although the density of hiking trails in TNP is 1.3 km/km
2 and is much higher than density of alpine and Pyrenean parks, a serious problem in the Tatras is the number of tourists, which exceeds the capacity of hiking trails [
58]. The exceptional popularity of this place causes the destruction of vegetation and soil cover and contributes to the reinforcement of the morphogenetic processes, resulting in the development of numerous forms of erosion. The issue of excessive tourism in the Tatras and its impact on the landscape transformation has been widely discussed in the literature [
12,
14,
57,
58,
59].
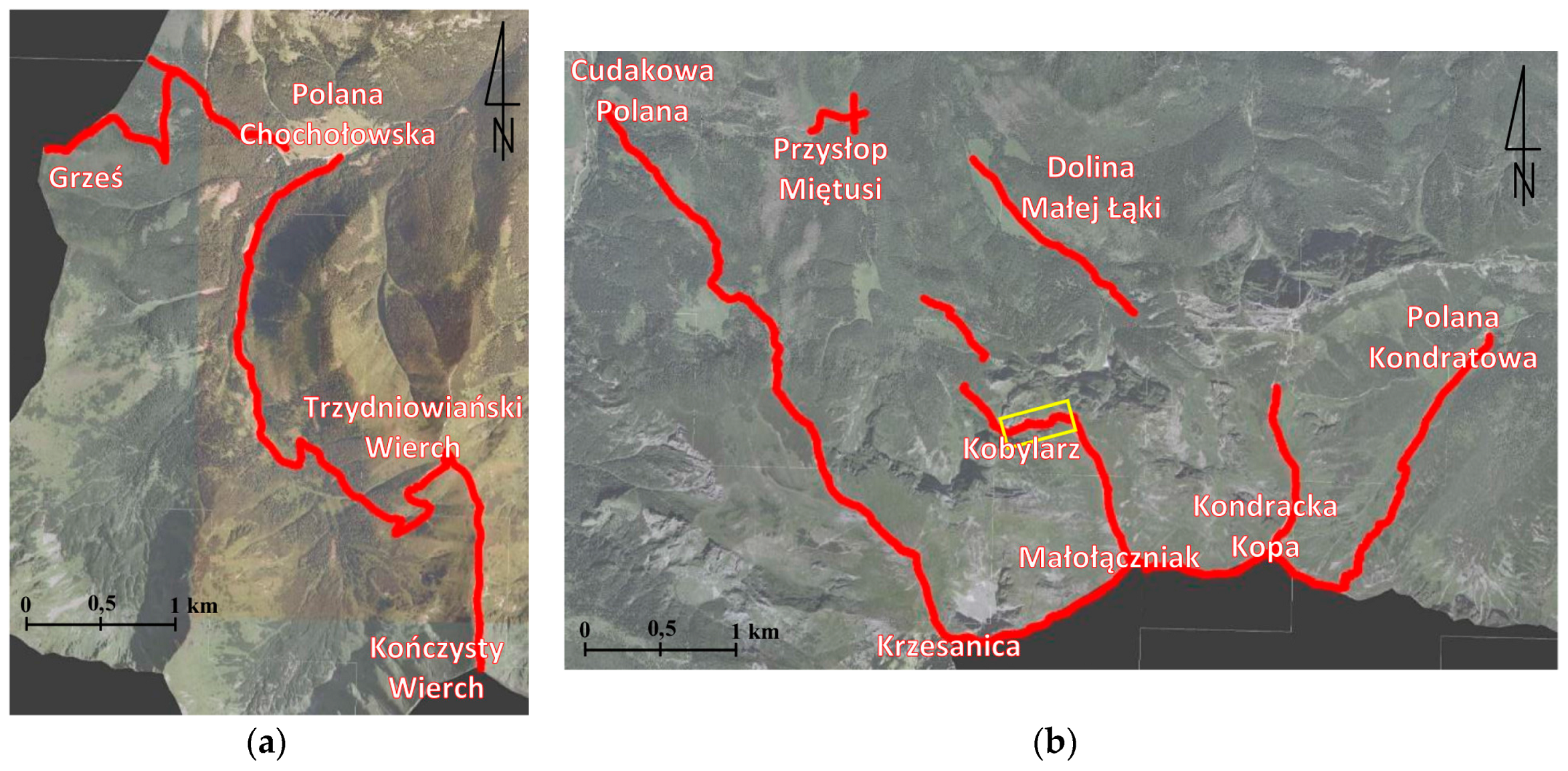
The linear hiking trails in the Western Tatras were used as case studies to verify whether it is possible to use a UAV to evaluate the spatial reach and intensity of erosion in the alpine areas. It has also been verified how accurately can detect relief changes by this method. In total, about 27 kilometres of hiking trails were measured (
Figure 2), which constitutes about 10% of all trails in the TNP. Some of these trails were overhauled recently (2014–2015). Their total length is 13.8 km. The length of the trails which have not been repaired is 13.2 km.
2.2. Data Acquisition
For data acquisition, a model S1000+ UAV manufactured by the DJI Company (Shenzhen, China), (
Figure 3) was used. It is an octocopter equipped with the DJI A2 flight controller with a GNSS receiver, a compass, and IMU, which enable the determination of the device’s horizontal position with an accuracy of ±1.5 m, and height with the accuracy of ±0.5 m. According to information provided by the manufacturer, the device works properly when the wind does not exceed 8 m/s and the inclination is not more than 35° [
62]. The UAV was fitted with a Alfa A7R camera (Sony, Tokyo, Japan) equipped with a Sony Zeiss Sonnar T* FE 35 mm F2,8 ZA lens, whose position was stabilised with a Zenmuse Z15-A7 gimbal (DJI, Shenzhen, China).
Measurements were carried out in August and September 2016. They included registration of vertical images of trails from onboard the UAV along with georeference information. All UAV flights were carried out by the holders of Unmanned Aerial Vehicle Operator (UAVO) qualifications certificate, while maintaining high security standards in the Visual Line of Sight (VLOS) conditions.
Field surveys with the UAV were preceded by drawing up UAV flight plans for each hiking trail which was subject of the research. It was assumed that the GSD would be:
- -
15 mm in non-forested areas; and
- -
20 mm in the areas covered with high trees.
Taking into account features of the equipment used for measurements and the characteristics of the study area, the following assumptions were made:
- -
the UAV real flight height (above ground level) over the non-forested areas was 100 m;
- -
the UAV real flight height (above ground level) over the forested areas was 150 m;
- -
the minimum side overlap between images in adjacent strips was 70%; and
- -
the minimum forward overlap between images in the strip was 85%.
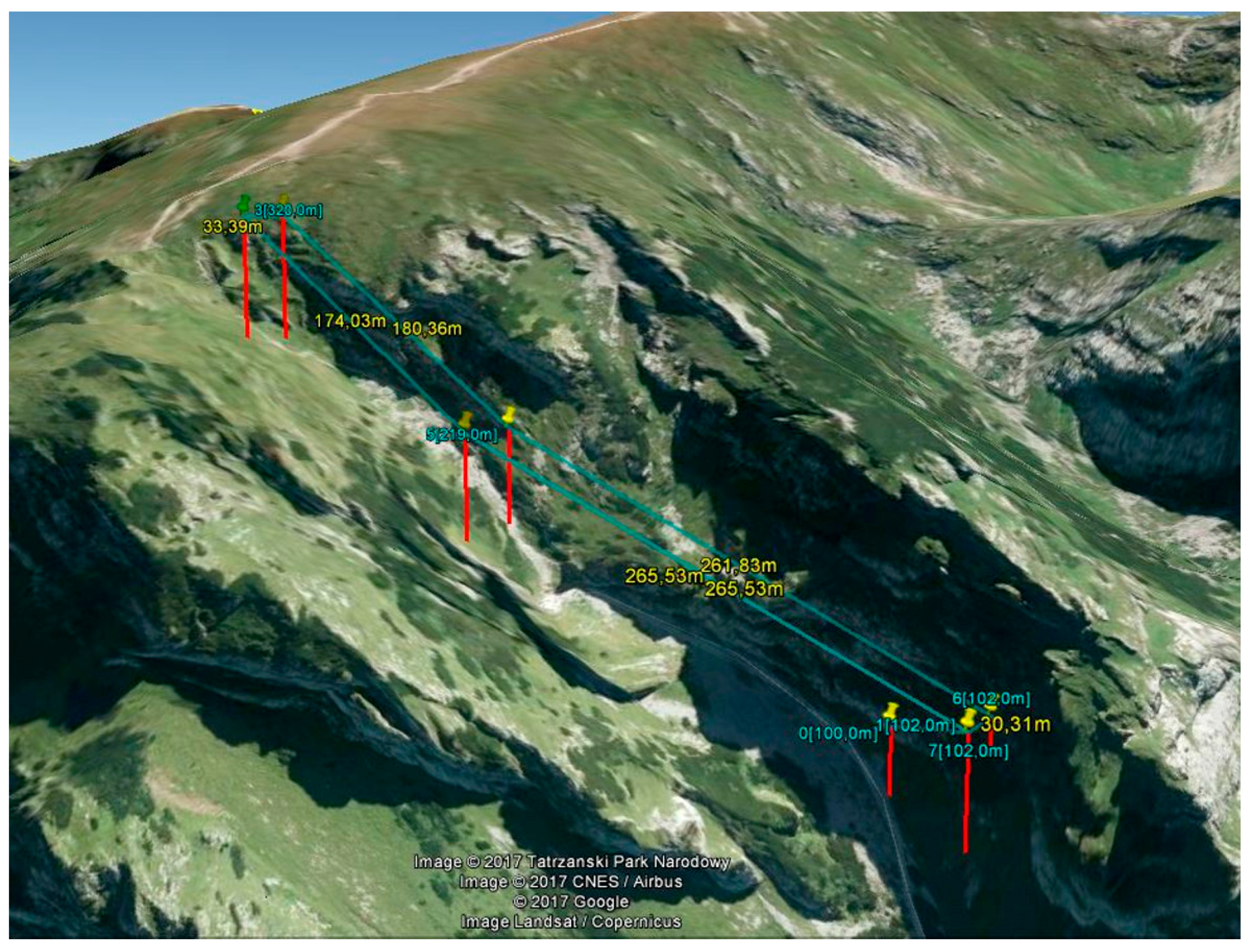
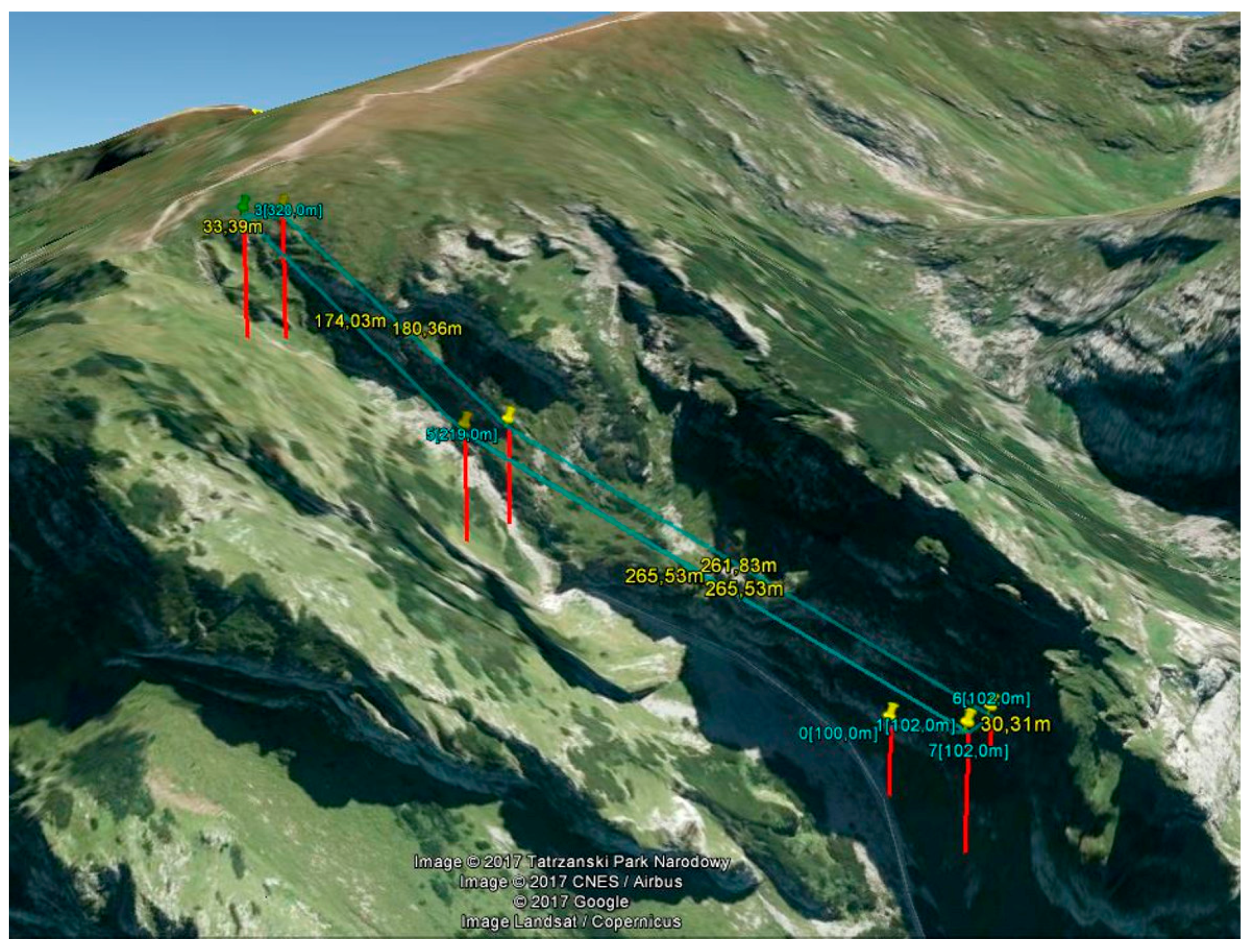
The Tatras’ steep slopes were a very demanding study area, so the DTM that was created on the basis of the ALS point cloud was used to plan the UAV flights. Therefore, flight plans considered the height differences along the trail, which exceeded 1000 m. For each hiking trail UAV flights were planned in the two parallel strips which were also parallel to the trail axis. In this way 37 flights were planned with lengths ranging from 0.7 km to 3.2 km. They were drawn up in the DJI Ground Station software. The example of the planned flight mission is shown in
Figure 4. The real flight height above ground level and the maximum height differences between waypoints in each UAV flight are presented in
Table 1.
The missions’ projects also included the optimal take-off and landing sites. They had to be easily accessible from the trail, far from obstructions, such as high trees or rock walls, and it was also important to ensure that during the UAV flight mission the device could not be present below the start point height.
It should be emphasized that the planning of UAV flights over difficult terrain, which is a very steep slope of alpine mountains, requires great care and precision. This problem was highlighted in [
63]. In that paper, the authors also pointed out the need for accurate flight planning in order to maintain the desired GSD. Resolving this problem for difficult alpine areas is described in detail above.
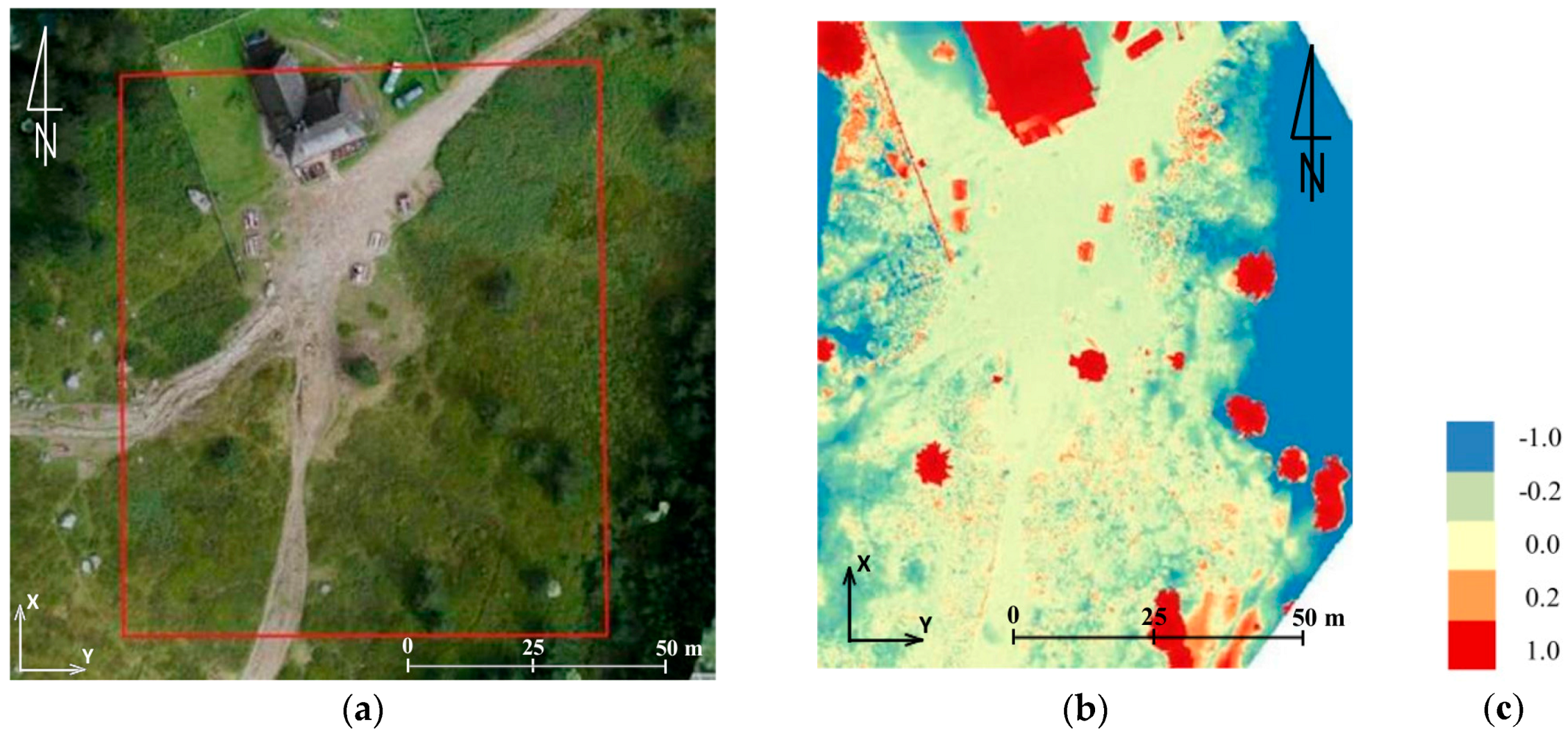
During the field works, before each planned UAV flight, it was necessary to set out, mark, and measure coordinates of control points and check points (
Figure 5) in the area covered by the UAV flight. Previously, however, the project of the photogrammetric control point distribution (control points and check points) along the UAV flight routes was made. It was assumed that pairs of points should be located (on both sides of the trail) in the interval of approximately 100 m. The correctness of the assumption was verified by analysing how the number and distribution of ground control points affect the accuracy of the DSM/DTM of the elongated areas, which is the subject of a separate publication [
64]. Due to difficult terrain conditions, the project was also verified on the basis of orthophotomap and DTM provided by the TNP (archival aerial orthophotomap and archival DTM from ALS data), in order to evade wooded areas (lack of visibility from the air) and areas which are inaccessible due to the steepness of the slopes.
Control points and check points were measured with the real-time network (RTN) GNSS method referenced to a network of reference stations NadowskiNET or the real-time kinematic (RTK) GNSS method referenced to one of ten base stations that were distributed evenly within the study area.
In the case of RTN GNSS measurements, the final coordinates were immediately calculated in the field and registered in the controller. The primary problem for the RTK GNSS method (using our own base station) was to determine the spatial coordinates of the base station. To this end, throughout the entire period of kinematic measurements the phase observations were registered on the base stations. These observations along with data from NTW1 (Nowy Targ) reference station, which belongs to the ASG-EUPOS system were used to determine coordinates of the base stations with the accuracy not lower than 1 cm. Based on the coordinates of the base stations, final coordinates of points were calculated. In total, 537 points were measured in the PL-2000/7 planar coordinate system (PL-ETRF2000) and Krondstat86 height system (PL-KRON86-NH) based on the levelling quasi geoid PL-geoid-2011. The accuracy of obtained coordinates is at the level of 2–3 cm.
2.3. Data Processing
Image processing was conducted in Agisoft PhotoScan Professional software (Agisoft LLC, St. Petersburg, Russia) which employs full SfM multi-view stereopsis and estimates internal optical parameters and spatial positioning of the respective cameras. Due to the large size of UAV data, it was also necessary to use appropriate hardware. The computer with two Intel Xeon E5 processors, 64 GB RAM, and an Nvidia Quadro K4200 graphics card was used for the photogrammetric processing.
The first step of image processing was to align the images. At this stage, the images were uploaded to the software and were given the initial orientation by adding approximate coordinates of images’ projection centres. In total, 7111 images were used. Images were combined in pairs automatically with the limit of 4000 tie points per pair. Images were aligned when parameters that analyse the image are at the level of single pixels. After images had been aligned, control points and check points were indicated on the individual images. This was preceded by uploading coordinates of the terrestrial photogrammetric control to the software. Each marker was indicated on all photos where it was visible.
Table 1 shows a list of the regions (photogrammetric missions combined in groups) along with the number of images, as well as control points and check points that were used for alignment.
With the block of photographs prepared in such a way for each mission, the initial alignment commenced. At this stage, some of points of the photogrammetric control worked as control points and the others as check points, which made it possible to evaluate the project accuracy. The block of photographs was aligned and, at the same time, the camera calibration parameters were determined. In this process the following values were determined: the principal distance (c), the location of the principal point (
cx and
cy) and distortion parameters (
k1,
k2,
k3, and
p1 and
p2). As a result of the alignment the root mean square errors of the control points and check points were obtained. They are listed in
Table 2. On this basis the accuracy of the generated products was initially assessed.
Then, the final alignment (optimization) of blocks of photographs was performed. This process involved all points of the photogrammetric control (both control points and check points). The final mean square errors of these points coordinates are listed in
Table 3. Mean values for these parameters calculated for all the missions are:
mx = 29 mm,
my = 29 mm, and
mh = 31 mm, which correspond to the error of the horizontal point position
mxy = 41 mm and the error of spatial position
mxyh = 51 mm. The worst results of RMSE errors were obtained for the missions in the Kobylarz region. This was due to a small number of control points, which were difficult to set up due to field conditions (steep slopes and exposure).
The next step was to create a dense point cloud with the method of dense matching. As a result, a total of 7,854,760,000 points were generated in all missions.
Table 4 shows the size of point clouds for each region. In addition, a number of tie points, which were generated when stitching images, was given. After creating a point cloud for each mission, point clouds were connected in larger groups. The aim of this step was to generate the largest study areas possible in coherent blocks. Then DSMs were created. These were used as a basis to conduct orthorectification of images and to create orthophotomaps. In the end, the finished products (point clouds, orthophotomaps, DSMs) were exported.
Table 4 shows the resolution of the final products. It is important to note that before the ultimate generation of an orthophotomap, it was necessary to deprive it of all artifacts, such as people who move.
2.4. Control Measurements
To verify the accuracy of the remotely-sensed data, TLS measurements of selected sections of trails and measurements of control profiles in various places along the trails were conducted.
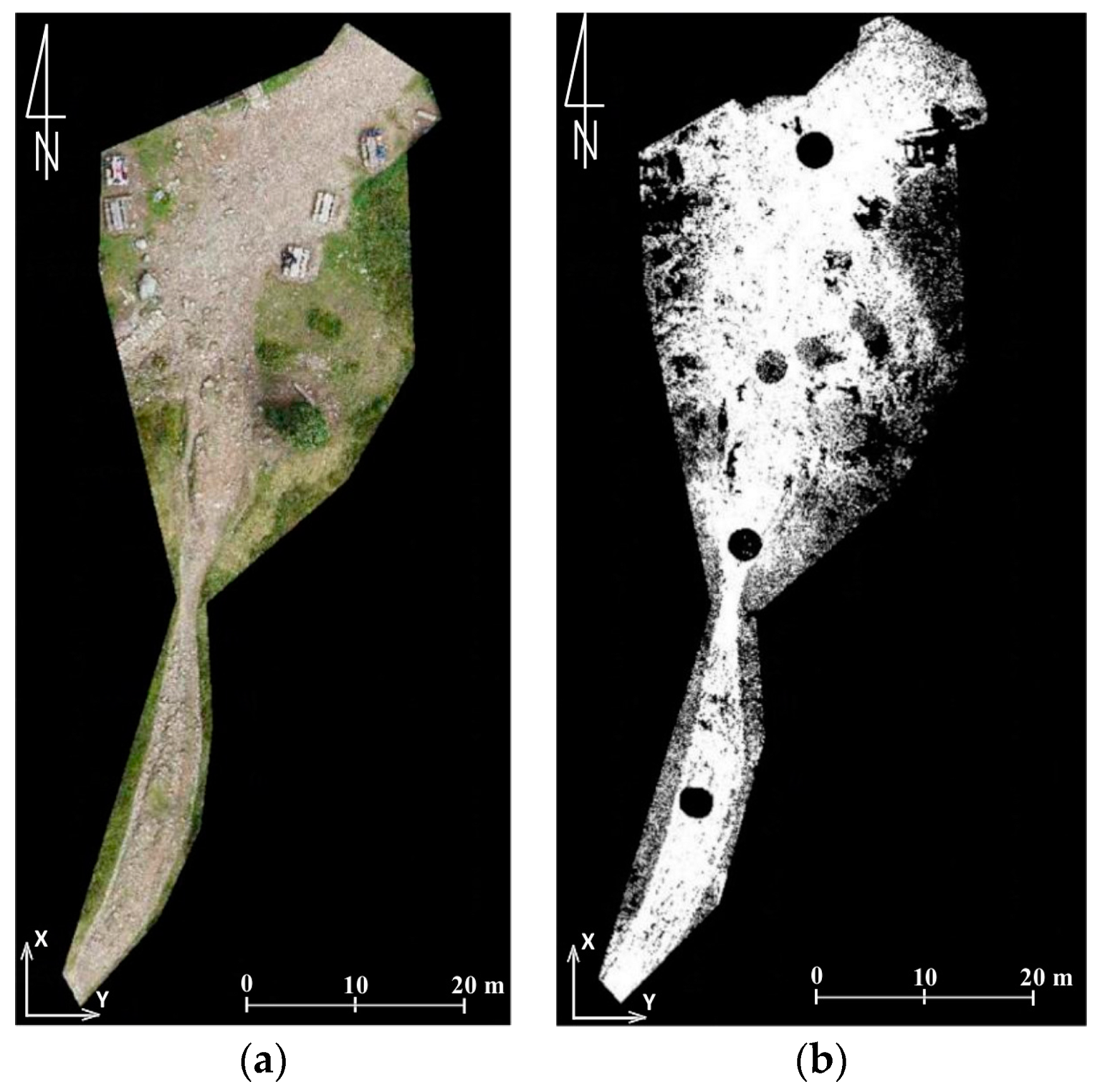
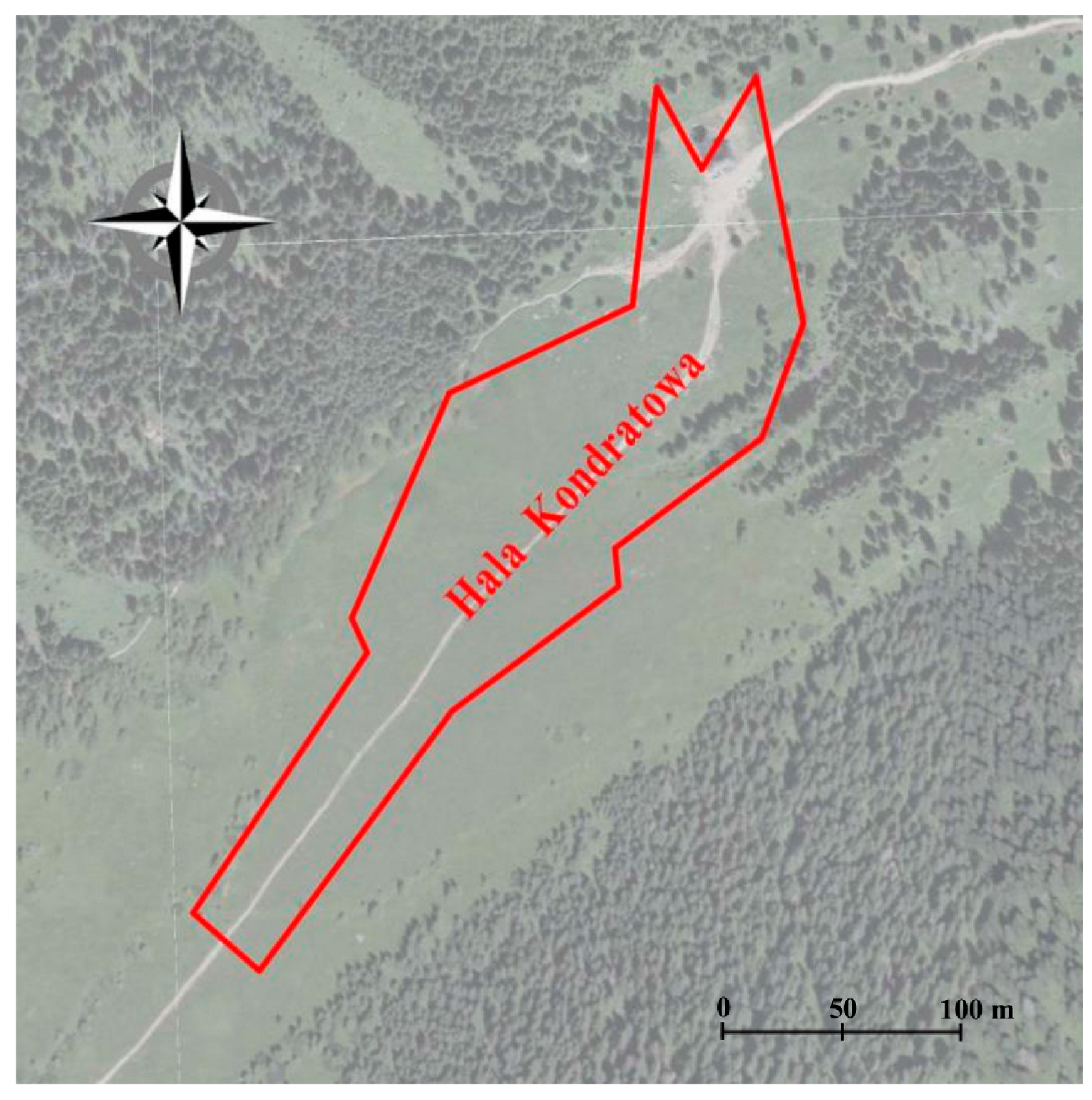
The TLS measurements covered a 400-metre section of the trail on Hala Kondratowa (
Figure 6). A Leica ScanStation C10 laser scanner (Leica Geosystems, St. Gallen, Switzerland) and the set of Leica HDS 6″ targets were used for measurements. The point clouds were registered with the traverse technique based on the three tripods method. Measurements were taken on 16 stations in the strip of land whose width was about 60 m. Each point cloud on the station was registered with the resolution of 10 mm/10 m. Spatial coordinates of 15 scanner stations were set with RTK GNSS measurements with the accuracy of ±1.5 cm. This enabled to significantly reduce propagation of errors between the scanner stations. The TLS data was processed with the Leica Cyclone software. At the beginning, the scanning traverse was aligned in the local coordinate system and the obtained data was merged into one point cloud. Then, the point cloud was transformed into the PL-2000/7 system and the final alignment was performed. The mean transformation error was 0.032 m. The next stage of work was clearing the point cloud of points representing, inter alia, people on the trail, surveying equipment, and artificial landscape features. Manual removal of the non-corrected data was carried out. In the end, data was filtered and the resulting point cloud was manually divided into two layers: ground and trees.
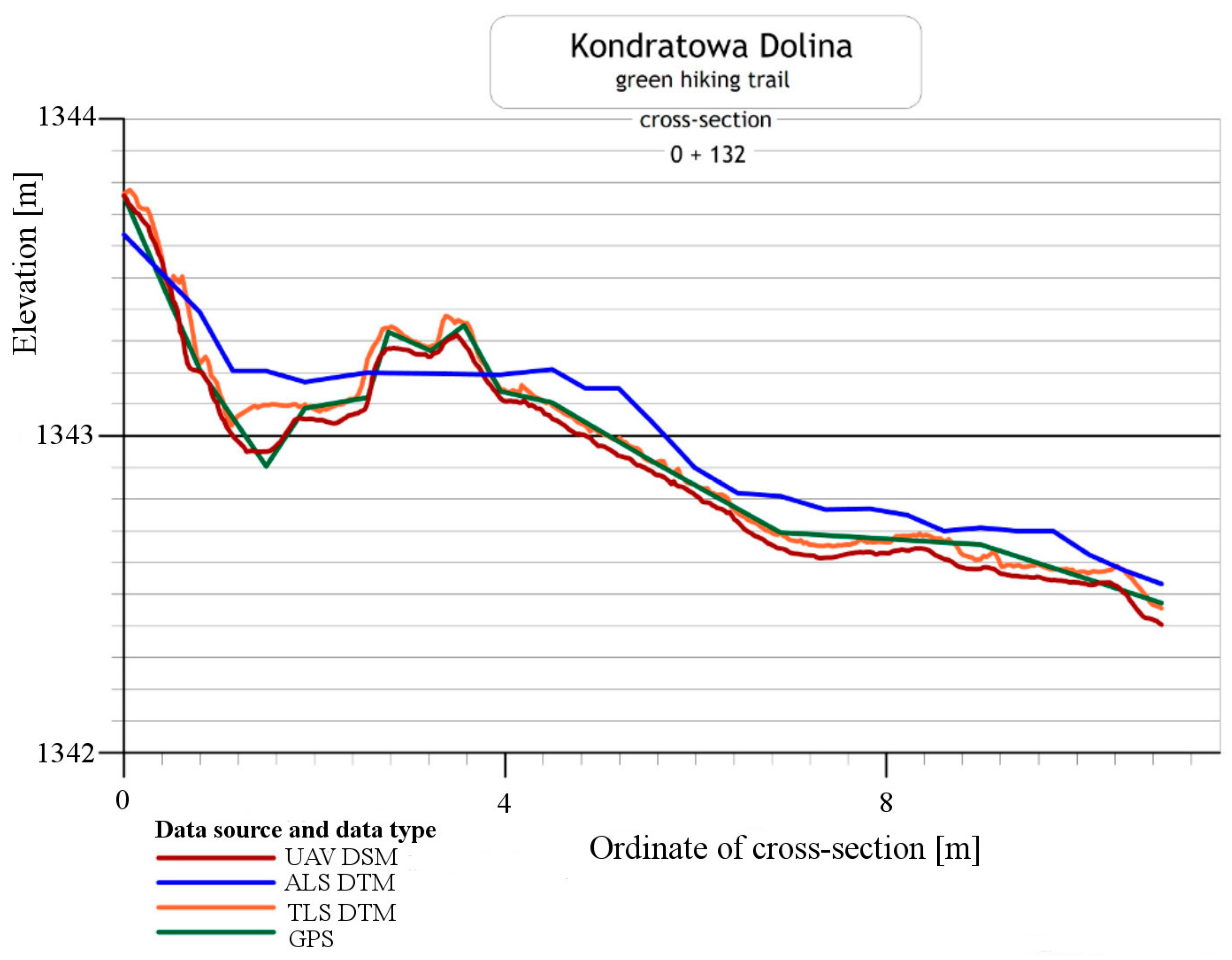
In order to validate the accuracy of the DSM obtained from UAV-borne photogrammetry, cross-sections of trails were also measured within the study area. Measurements were taken by means of RTK GNSS or RTN GNSS methods. The measurement methodology was analogous to the one applied for the photogrammetric control. Control profiles were measured in such places as Małołączniak, Przełęcz Kondracka, along Dolina Kondratowa, along the trail at Ratuszowe Źródło (Czerwony Grzbiet), along the trail from Cudakowa Polana to Ciemniak.
4. Conclusions
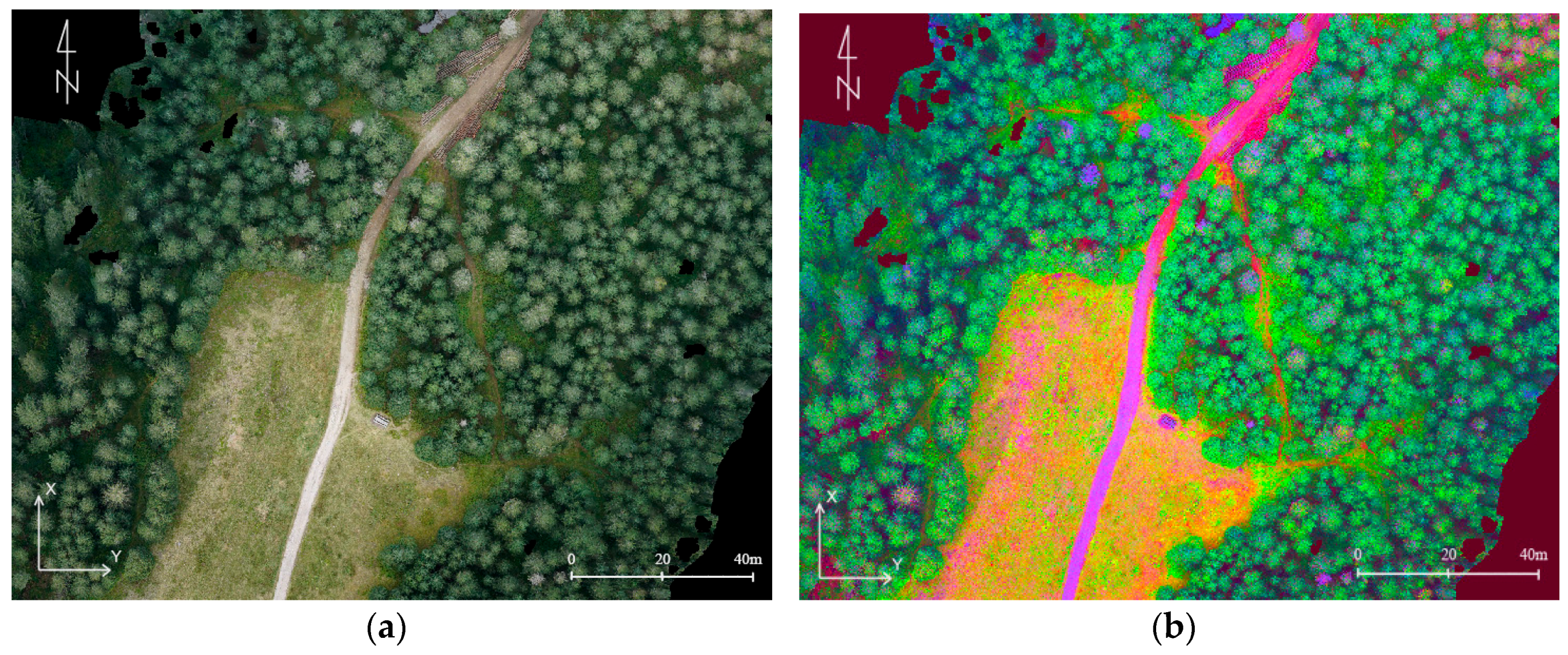
This article describes, in detail, the process of spatial data acquisition by means of a UAV in difficult alpine areas. Moreover, it presents various possibilities of survey data analysis which are aimed at the assessment of erosion along hiking trails, as well as at studying land cover changes, particularly the floral succession in the immediate vicinity of hiking trails.
The area in which the research was conducted is demanding and imposes the necessity of precise planning of the UAV flights, as well as positioning control points with regard to a great number of factors. At this stage it is particularly important to focus on the land forms and forest cover.
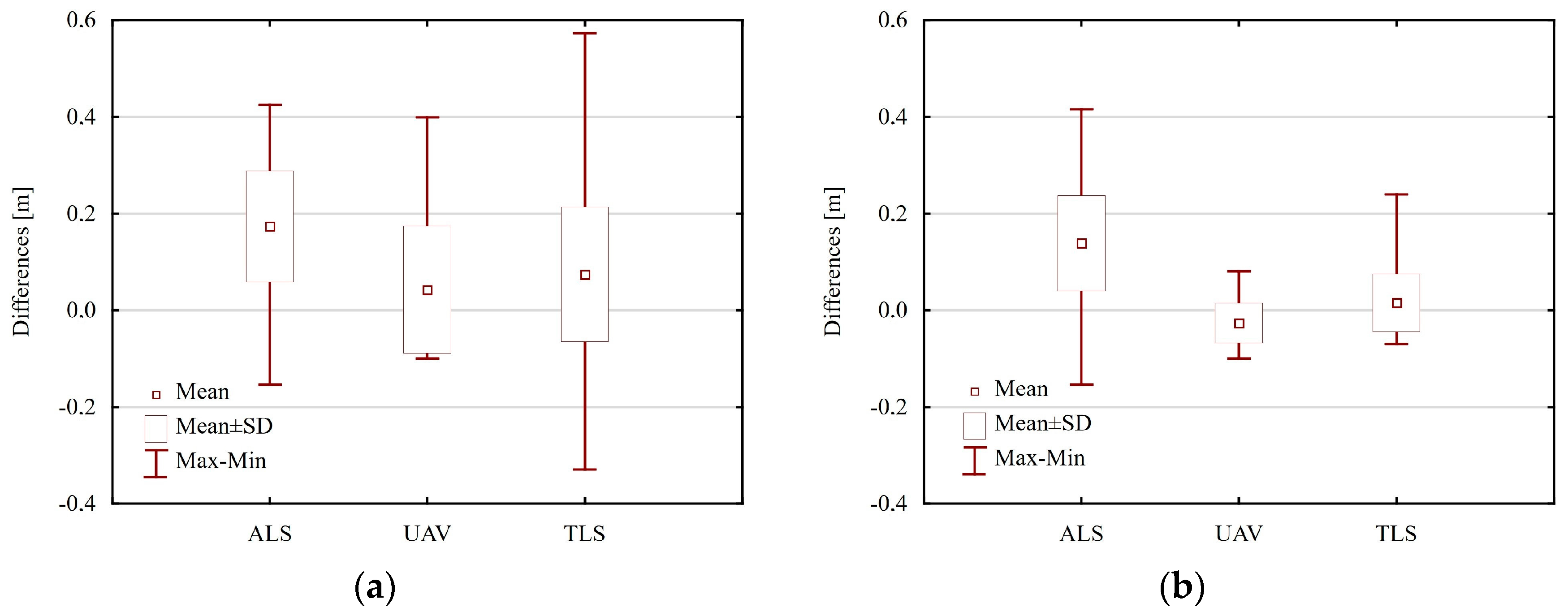
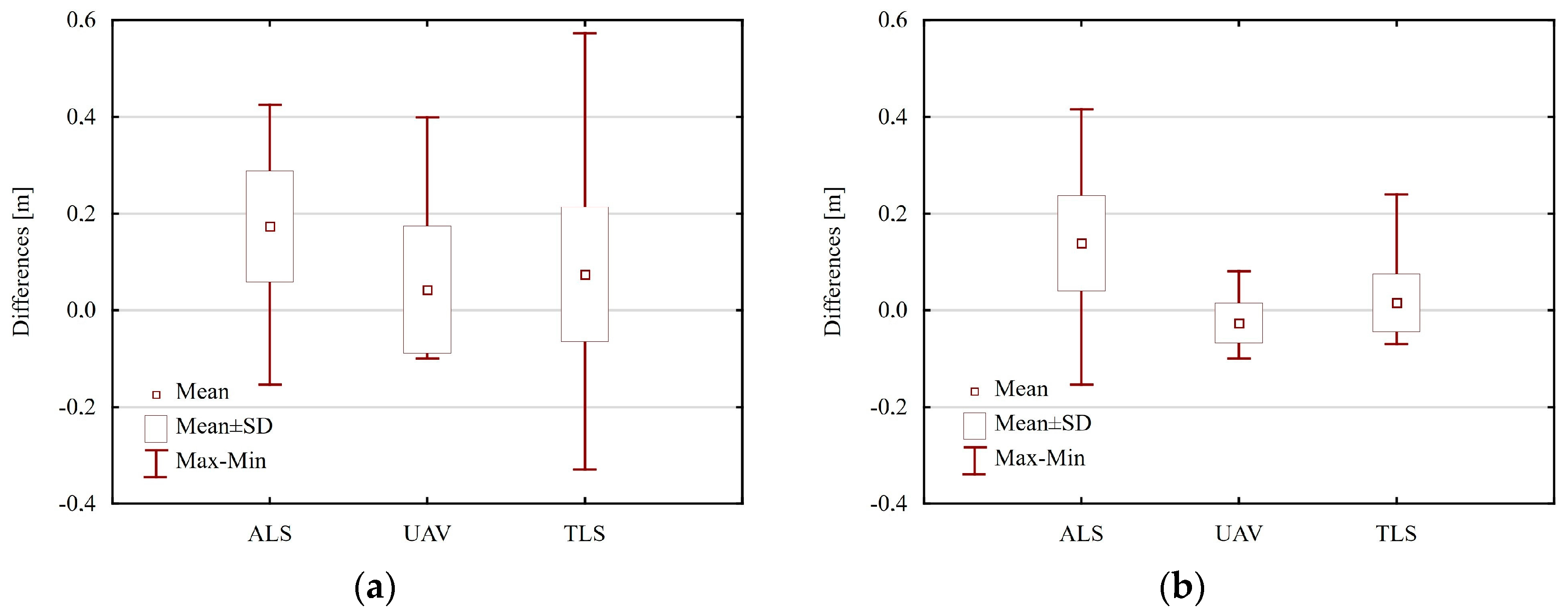
Basic products resulting from UAV flights (point clouds, DTMs, orthophotomosaics) make a valuable source material for advanced spatial analyses. Their accuracy assessment parameters, calculated by comparing them with the results of measurements conducted with GNSS and TLS methods, are satisfactory. The methodology adopted enabled the surveying of trails in alpine areas not covered with vegetation by means of UAV imagery with an accuracy of about 50 mm. Although similar accuracies have been repeatedly confirmed in various published studies, they never referred to large, elongated objects with a very high inclination along their axis. It should be noted that the trails subjected to examination were from 1 m to 15 m wide and a vertical difference between the lowest and highest points in modelled terrain exceeded 1000 m.
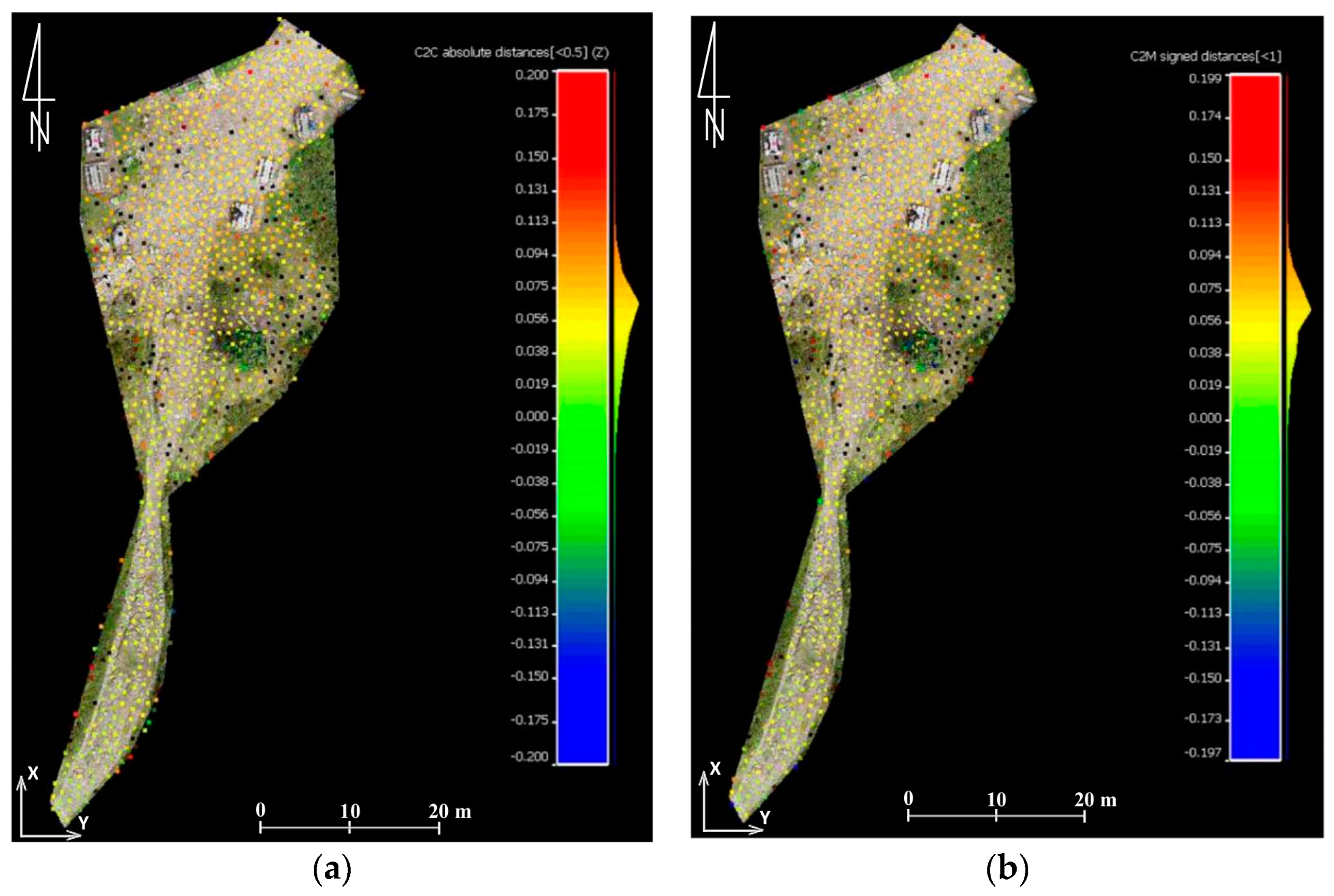
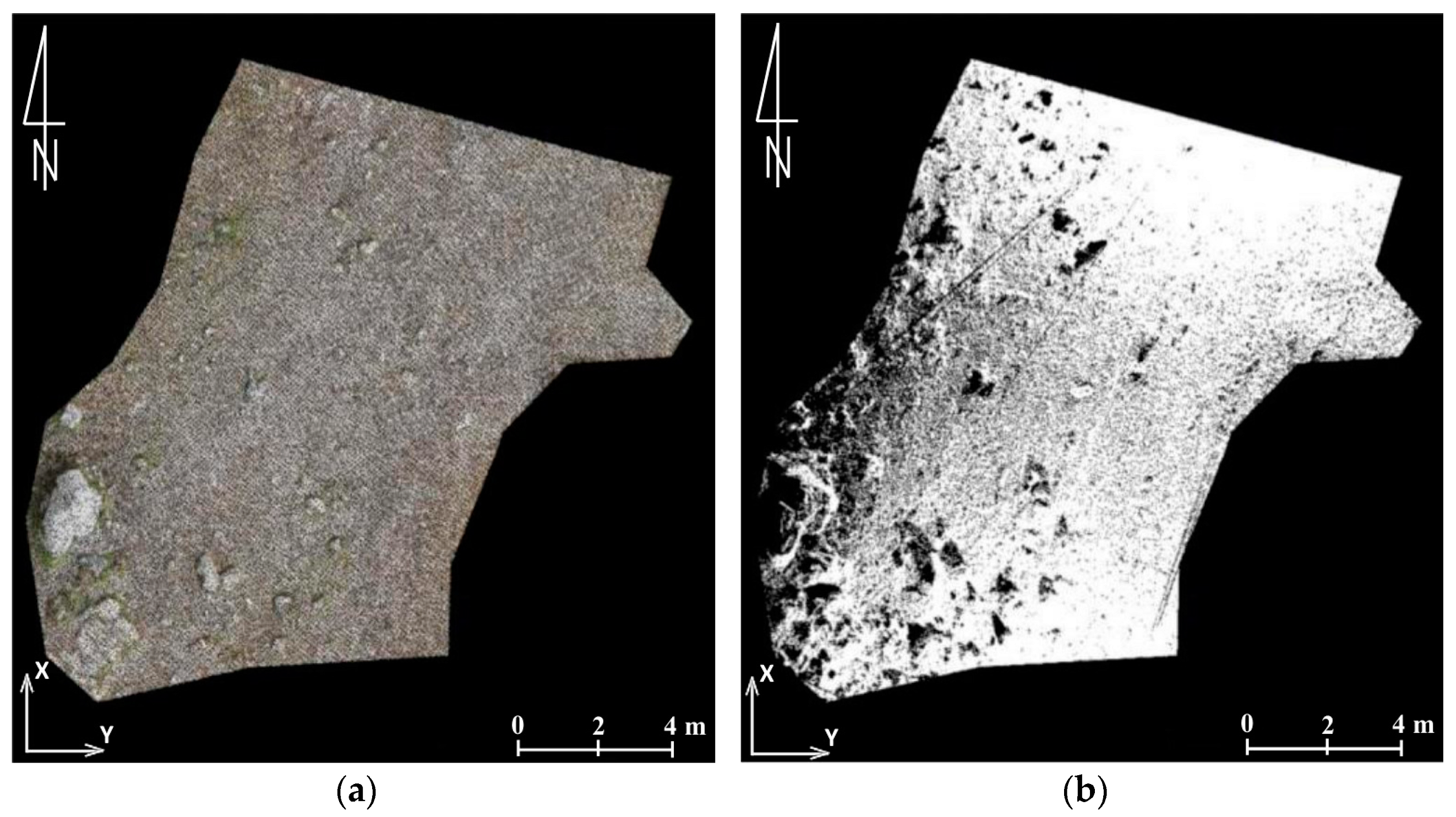
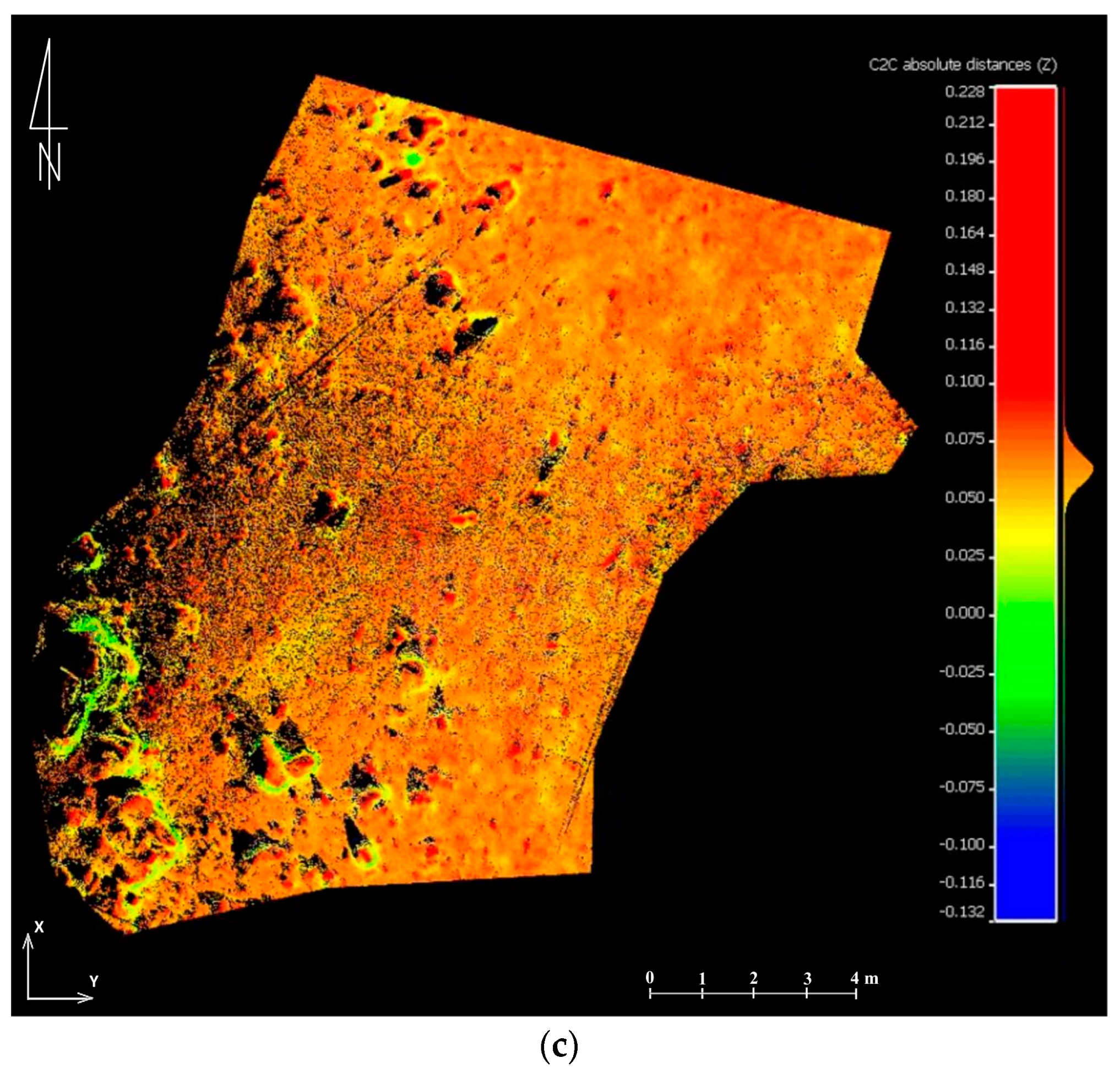
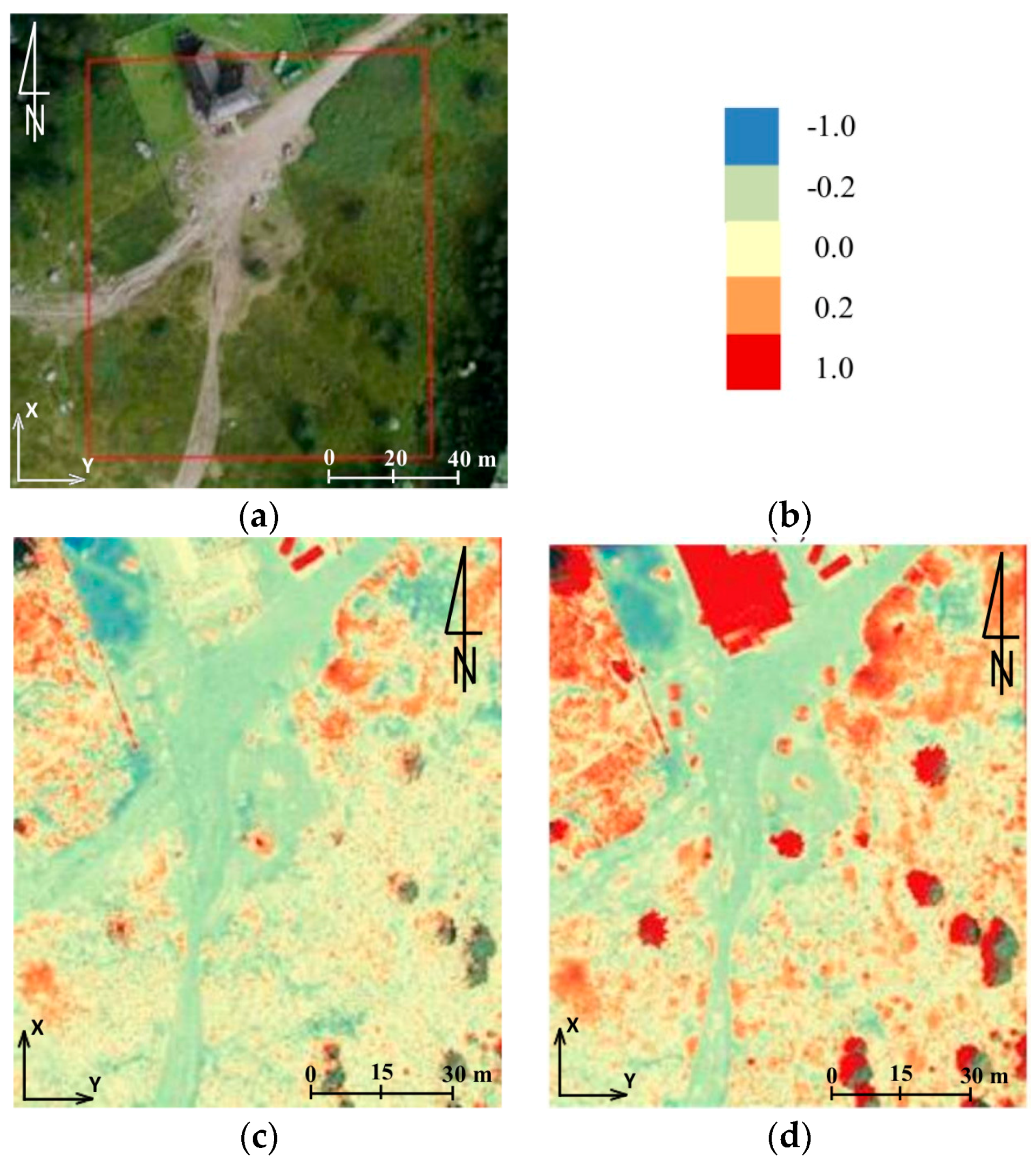
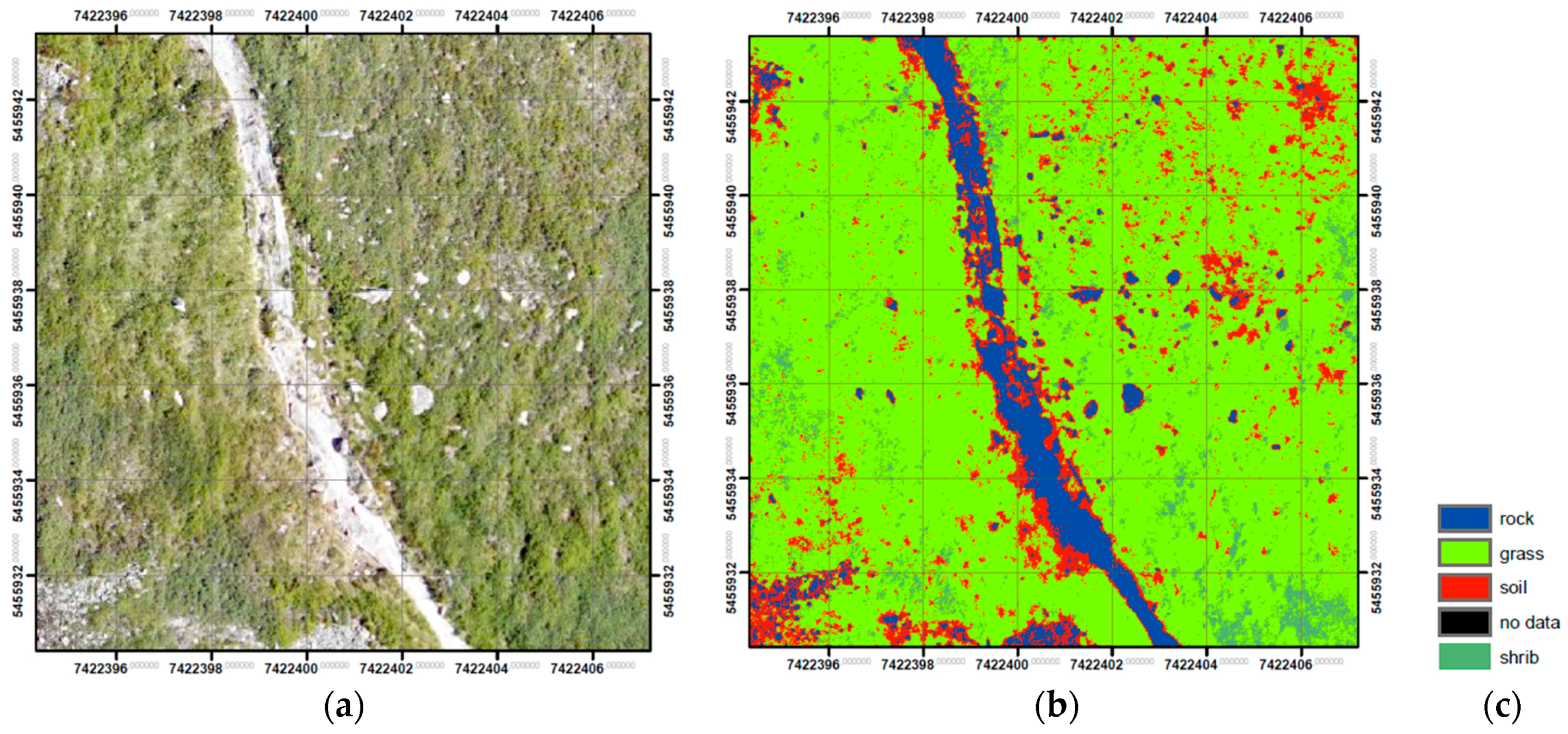
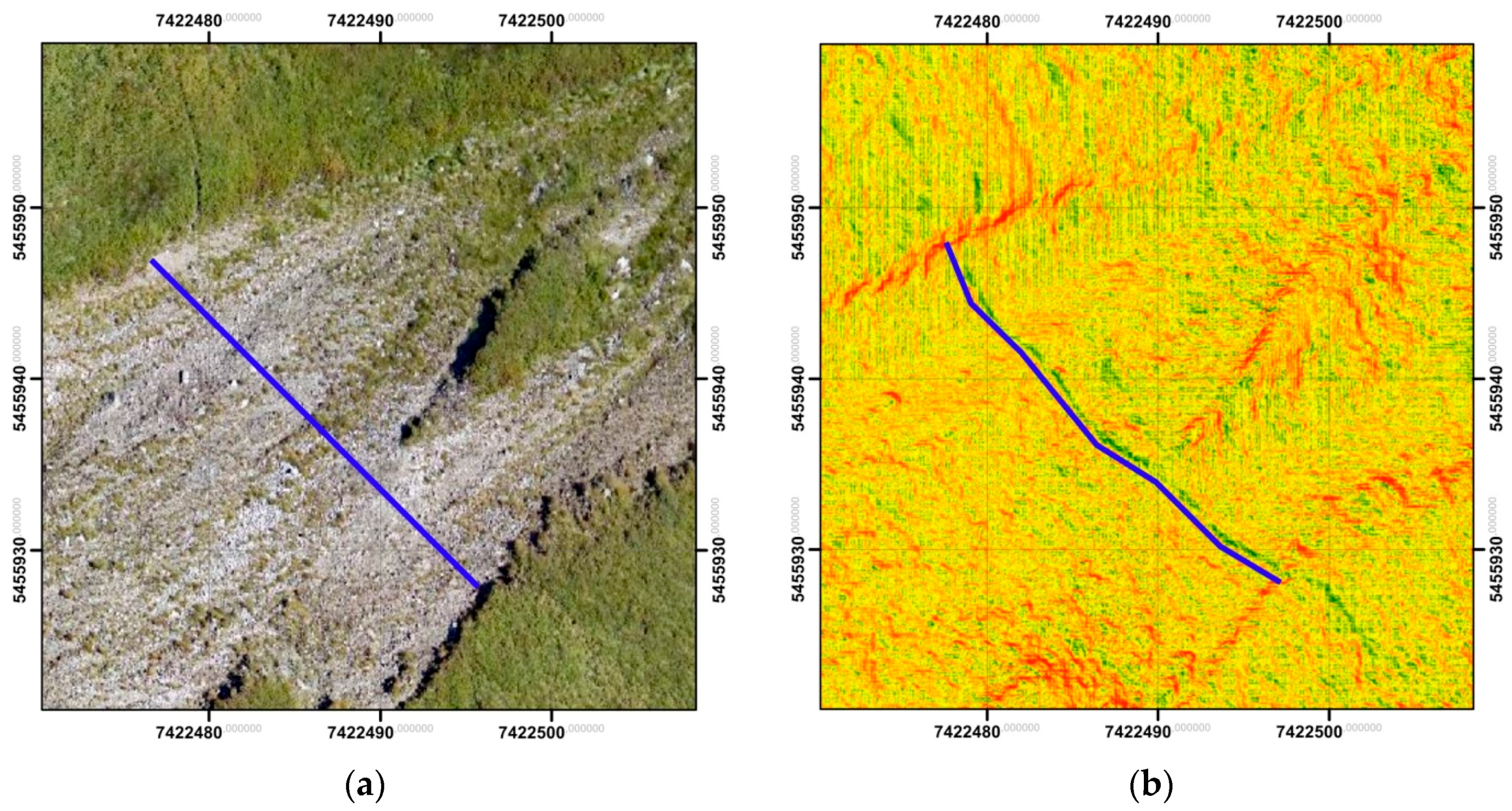
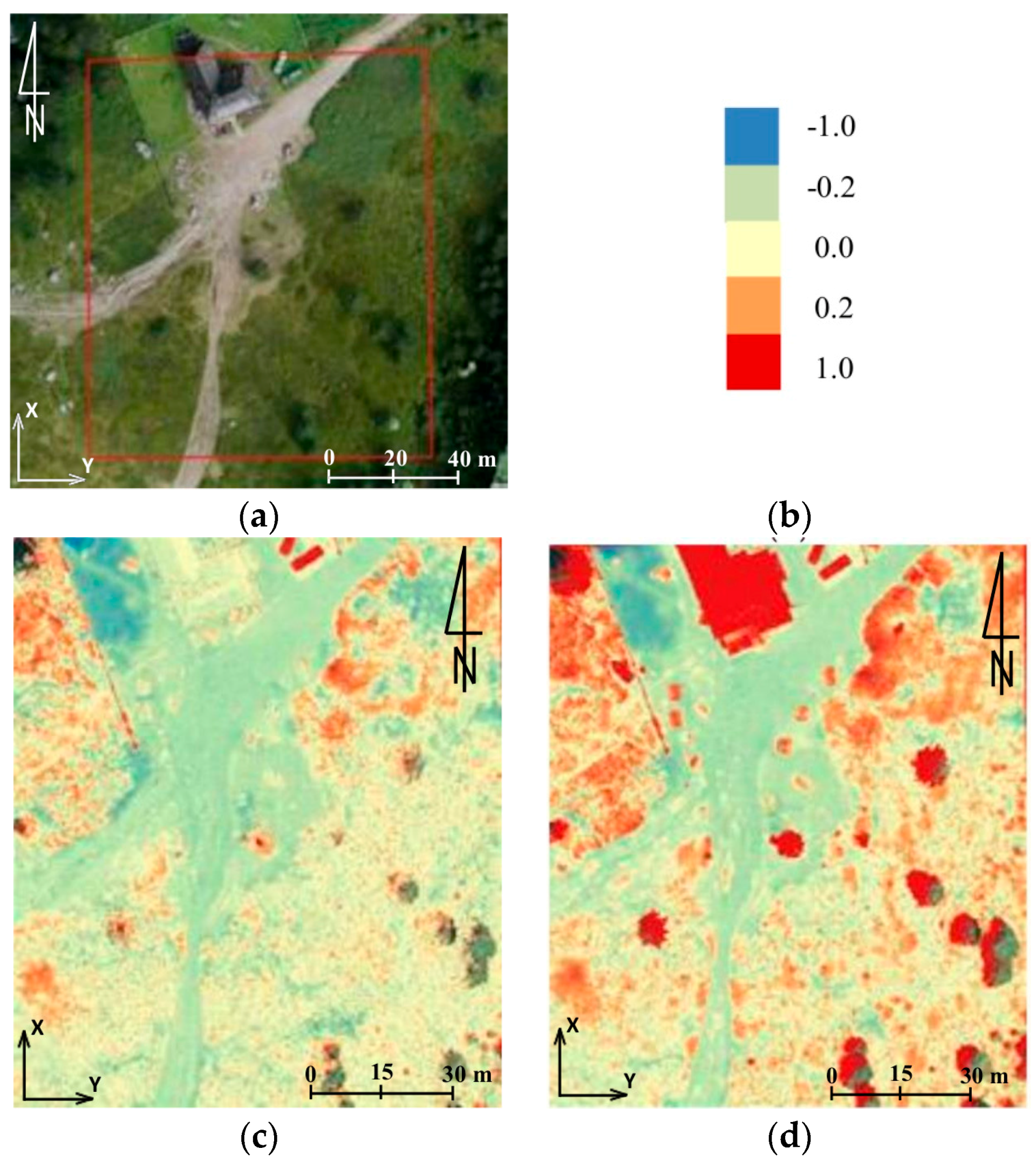
Advanced analyses consisting in the comparison of data from various measurement periods were conducted in the next part of the study. It has to be emphasised that some of these analyses were made by comparing the obtained materials with historical data that features lower accuracy and spatial resolution. Despite this, the comparisons of point clouds facilitate the interpretation of changes occurring along the hiking trails. By analysing the generated differential maps, it is possible to define places with locally disturbed values of differences. However, such places should be additionally analysed on high-resolution orthophotomaps in order to eliminate factors which can distort the results of analyses, such as the increase in vegetation, or the presence of people on the trail during measurements. The application of various methods of digital analysis of images allows for automatic detection of phenomena and relations which are invisible for an observer, while being more efficient than manual data processing.
The presented studies do not exhaust the potential of analyses or their interpretations. Additionally, it is worth emphasizing that the most effective method would be to compare the data of similar accuracy and resolution parameters conducted in a similar period of the year. Therefore, it seems justifiable to conduct further measurements using the UAV in the following years. The data obtained in such a way would certainly result in the increase in the reliability of defining even small (a few centimetres long) and short-term changes in the morphology of the terrain or forest succession. By means of this, it will be possible to define the effectiveness of protective actions taken by the TNP. This is because of the high density and high accuracy of the collected data. It also seems justified to examine the possibilities of limiting the number of necessary terrestrial control points (without losing the spatial accuracy) which, in such a differentiated and spatially difficult survey area, is going to allow for the optimisation of the data acquisition time.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}