
Support System to Improve Reading Activity in Parkinson’s Disease and Essential Tremor Patients

 ,
,  ,
,
Abstract
:1. Introduction
2. Related Work
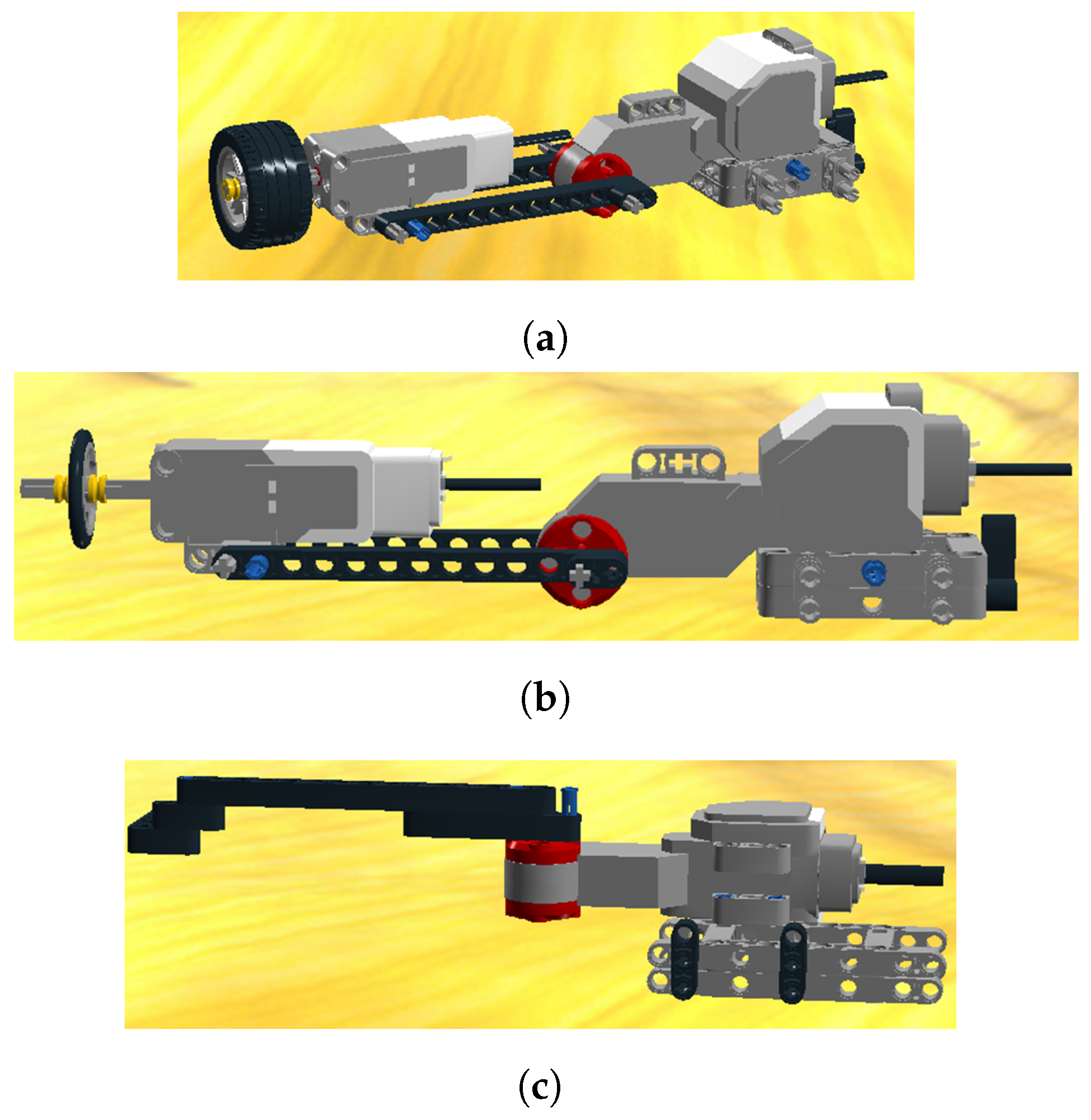
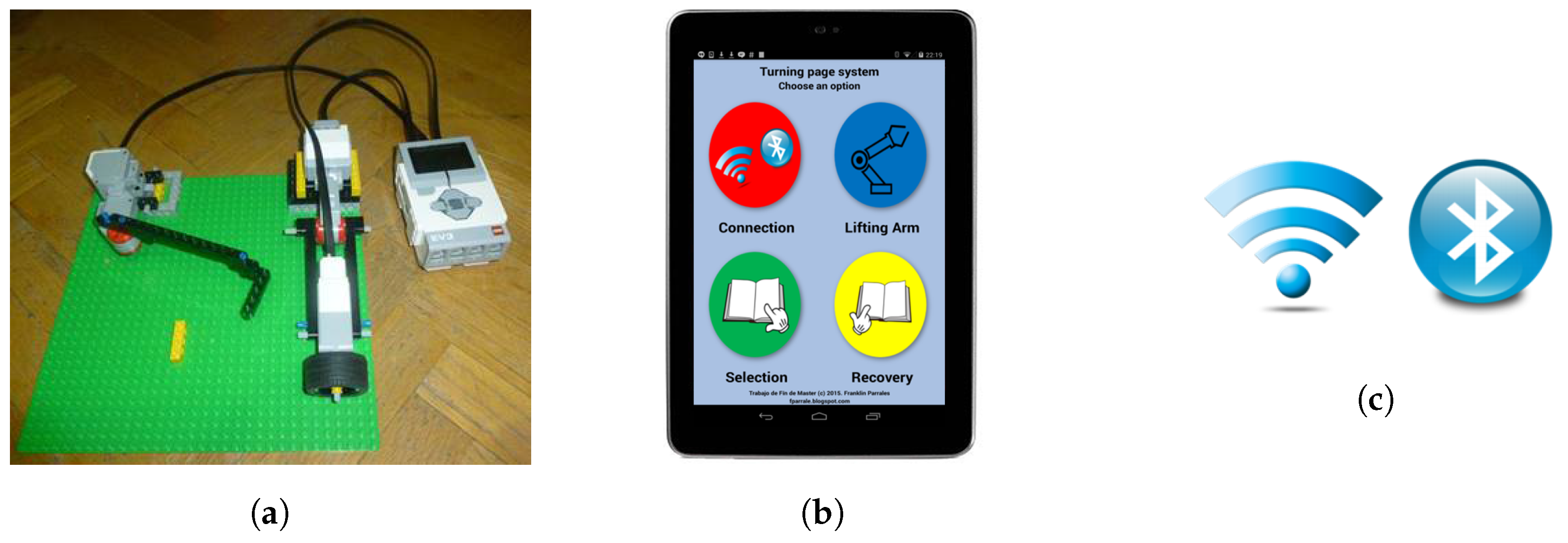
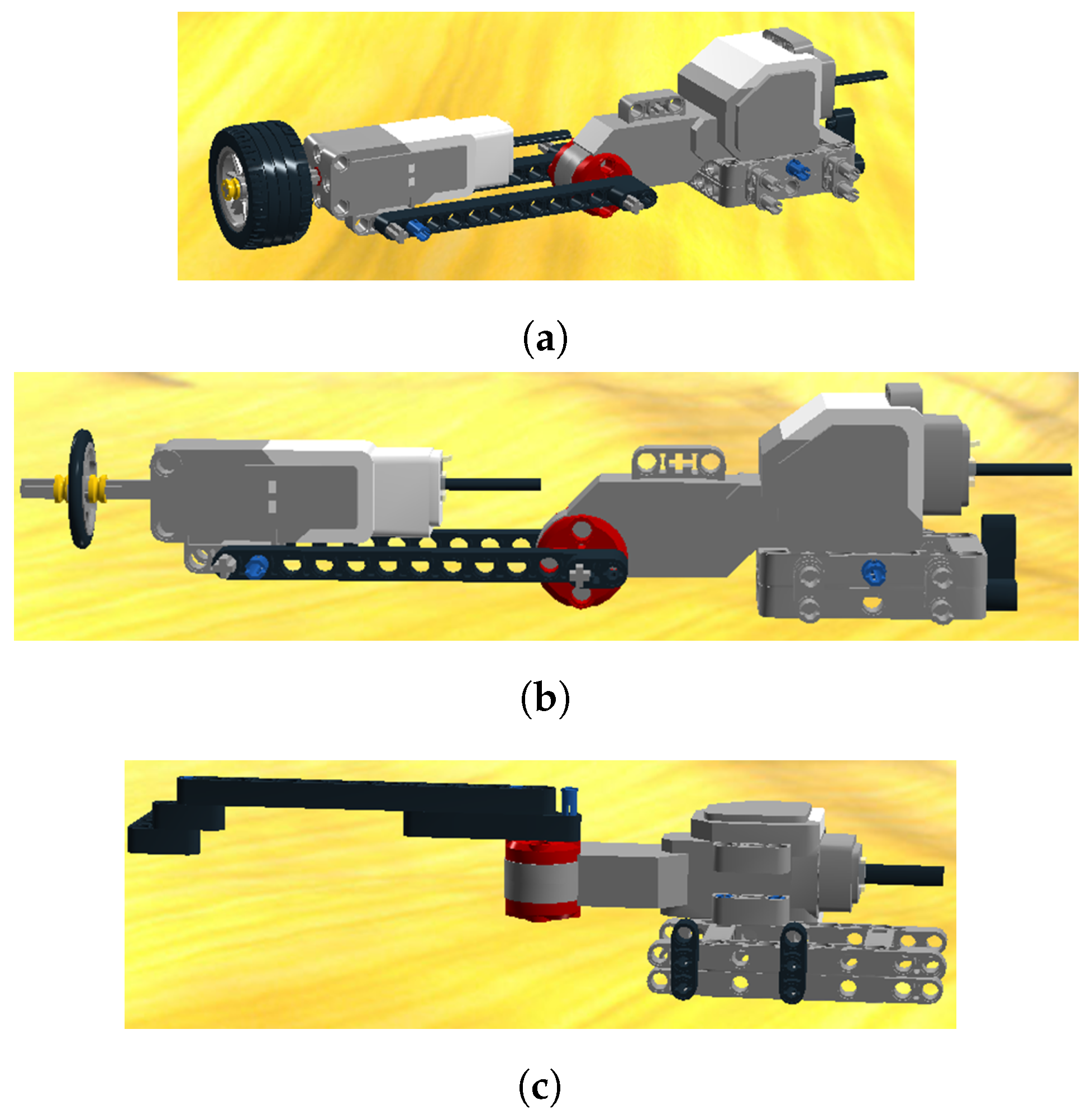
3. System Description
- The hardware elements belonging to the Lego Mindstorms kit, as depicted in Figure 1a.
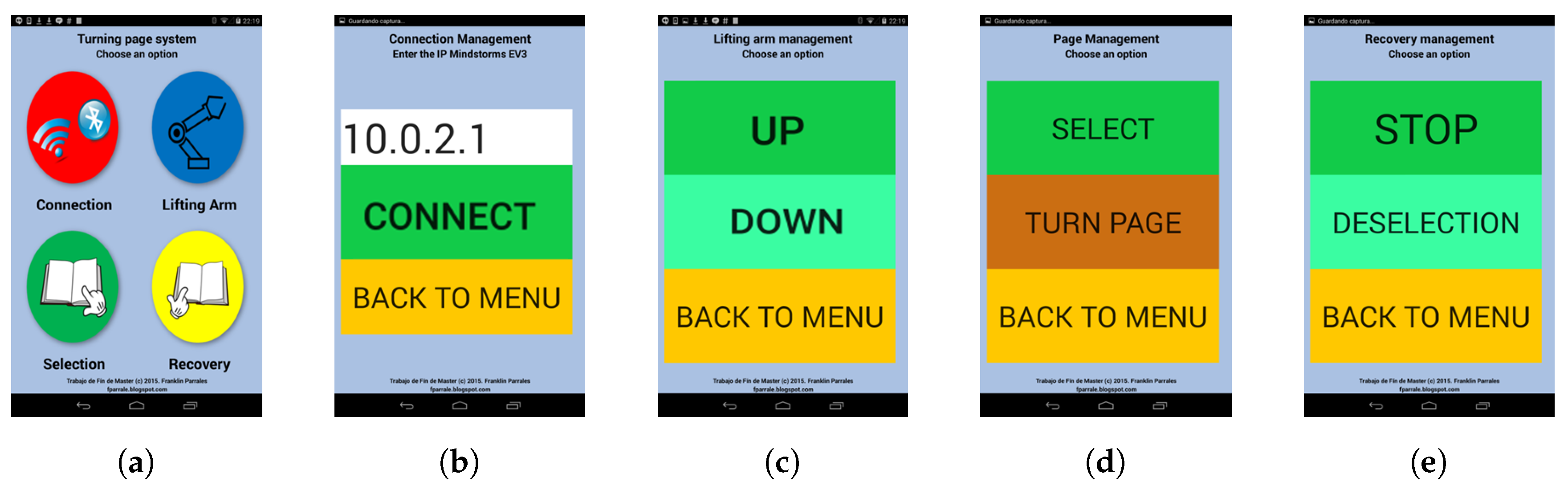
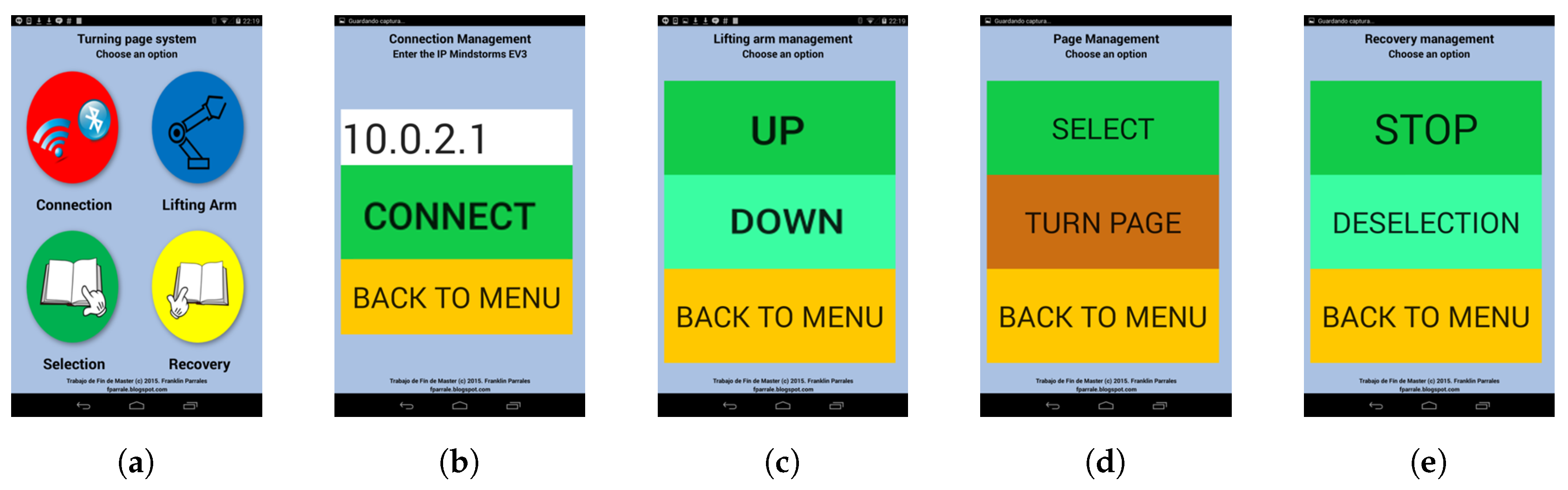
- A tactile interface developed for Android systems, which has been designed considering the motor limitations of PD and ET patients, as shown in Figure 1b.
- The type of connectivity that enables the remote control between the interface and the hardware components, as described in Figure 1c.
4. Experimental Section
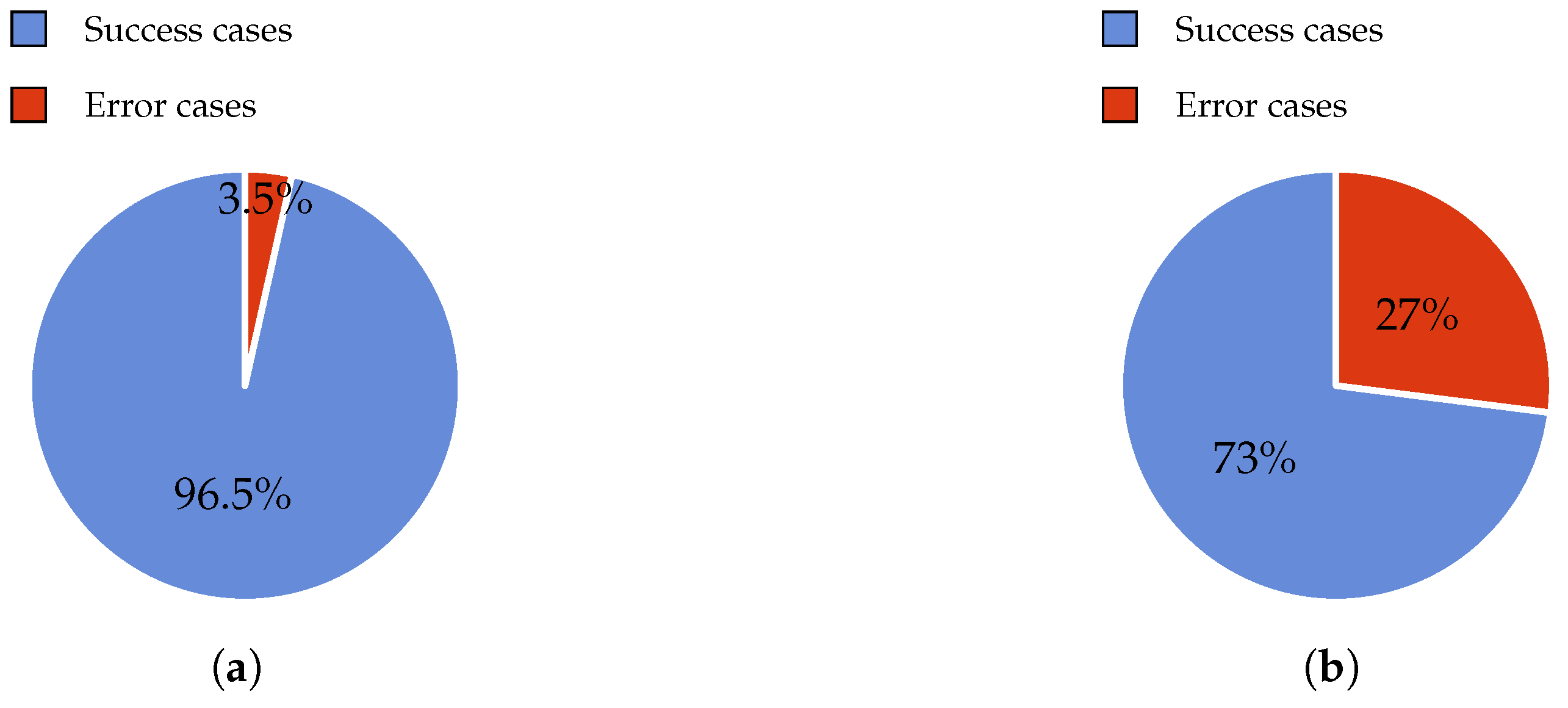
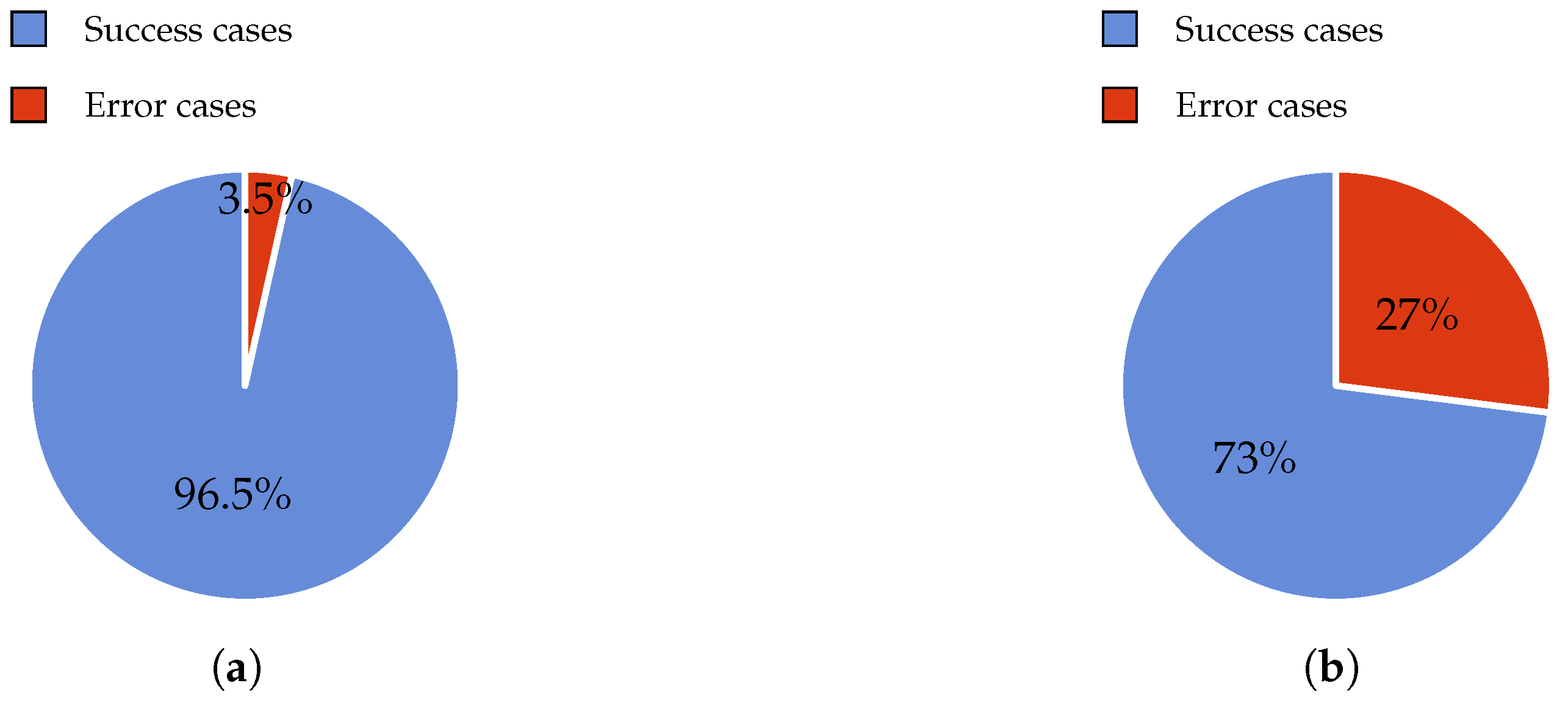
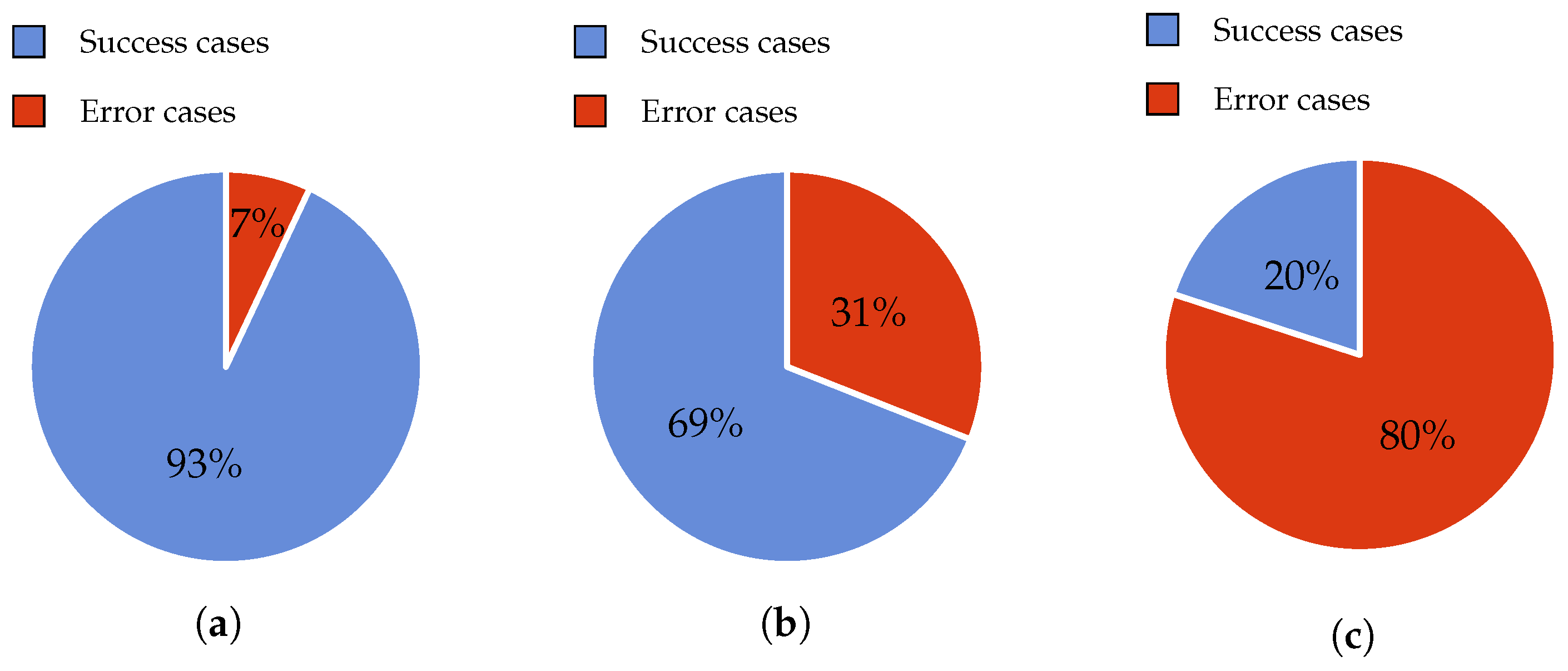
4.1. Error Rate
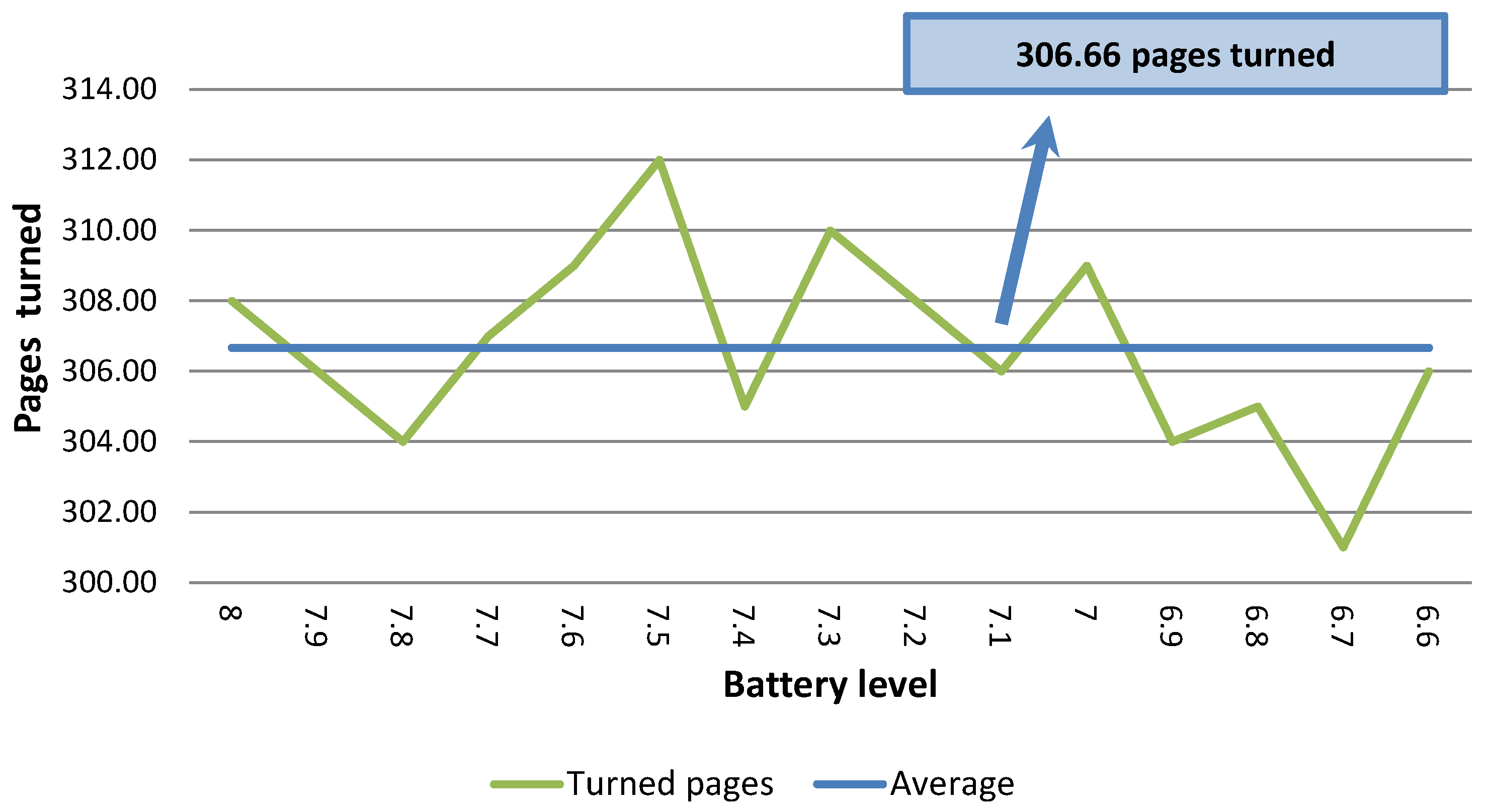
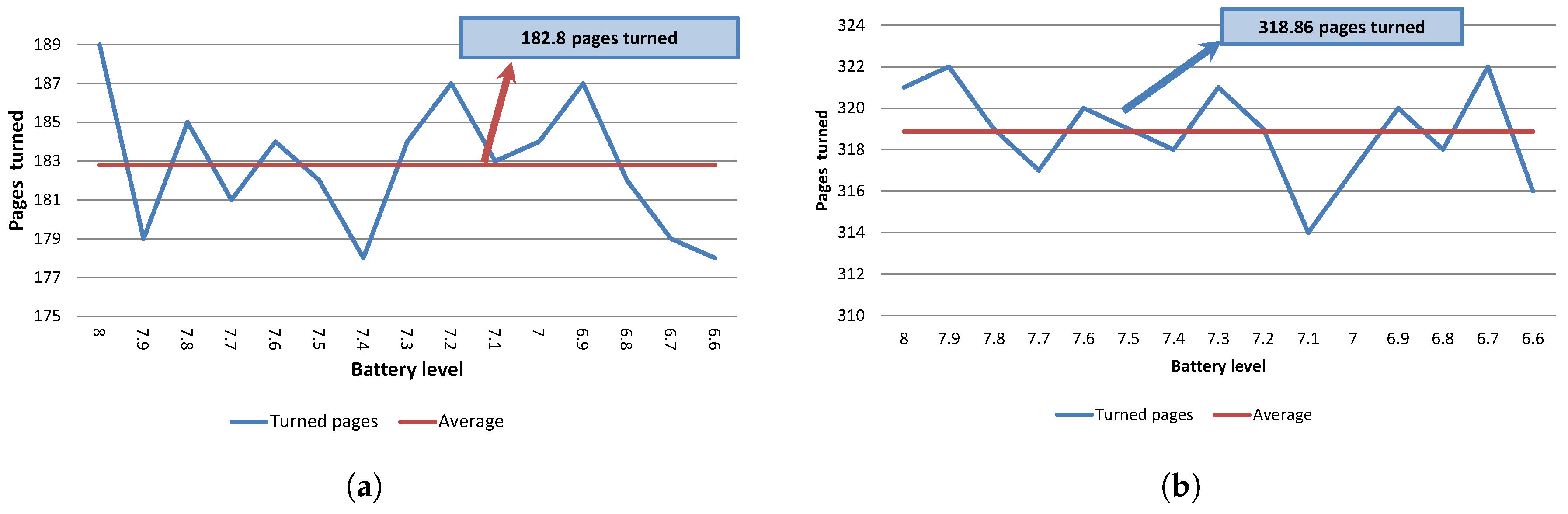
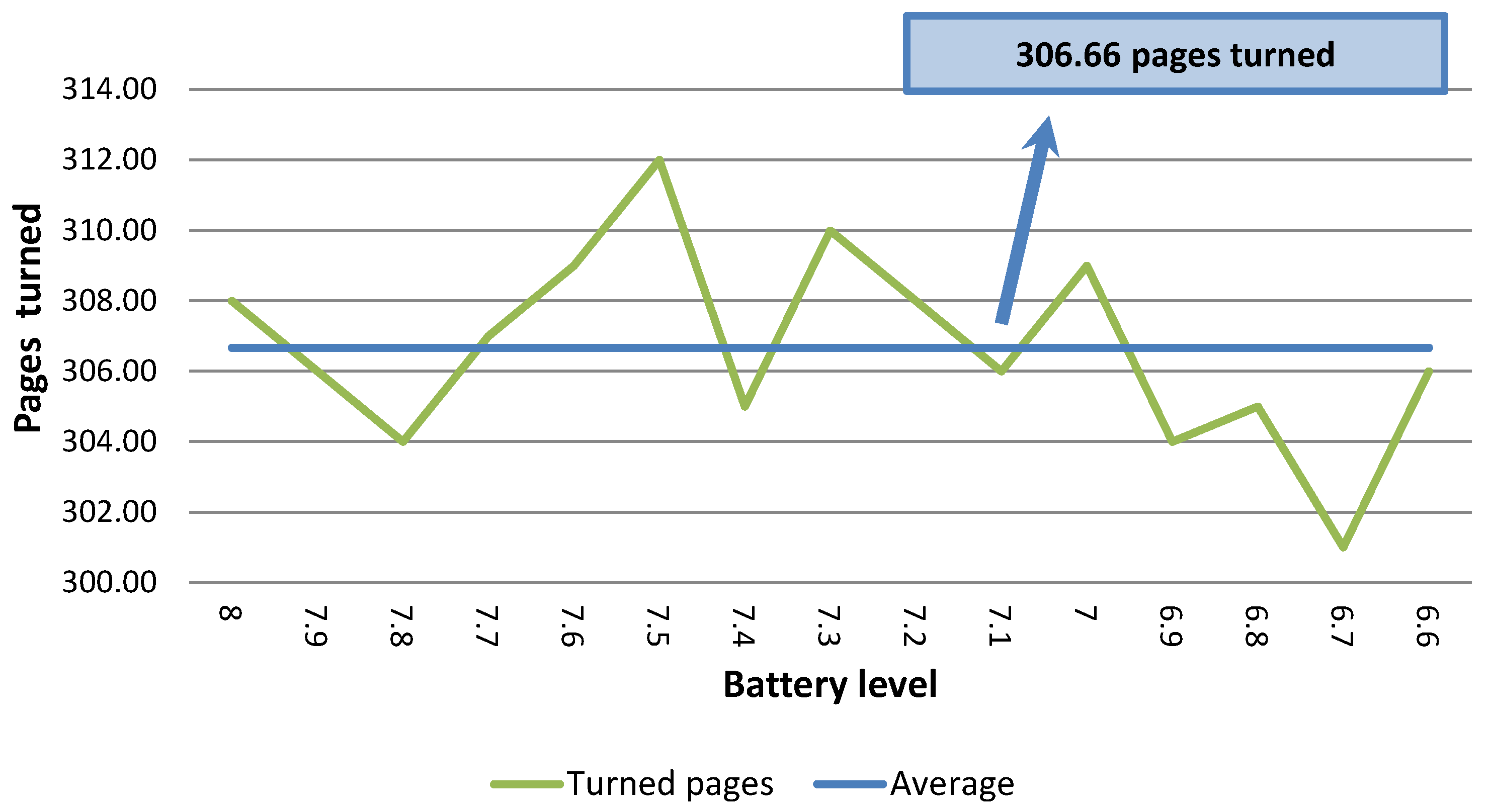
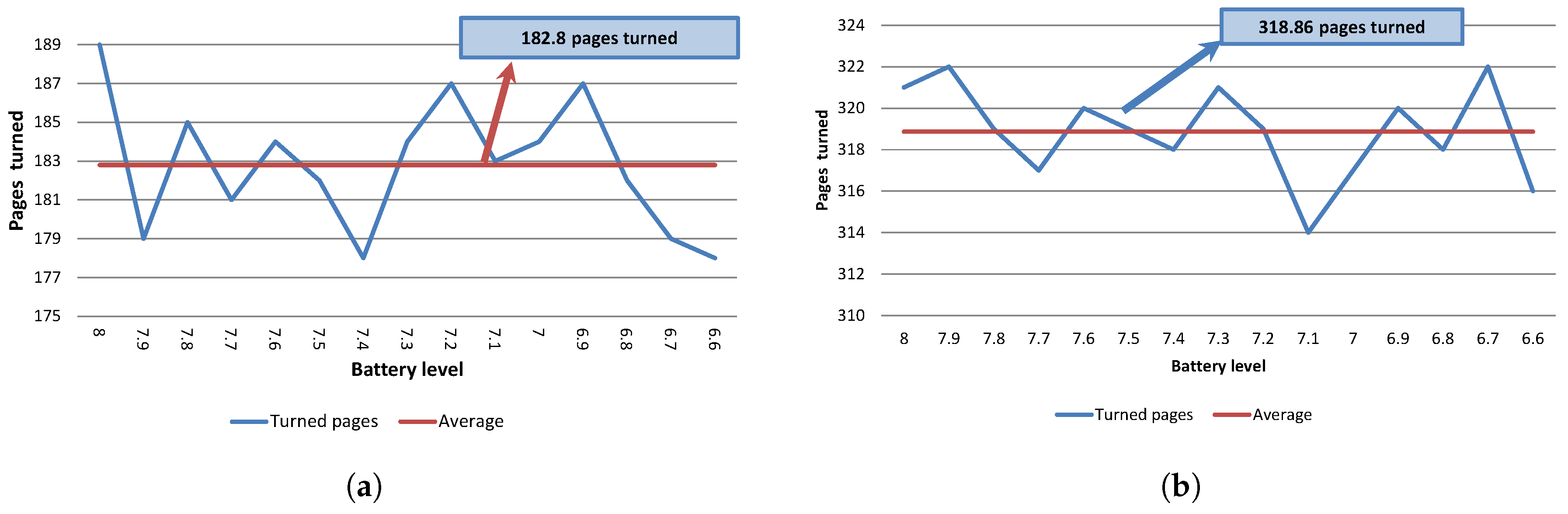
4.2. Battery Usage
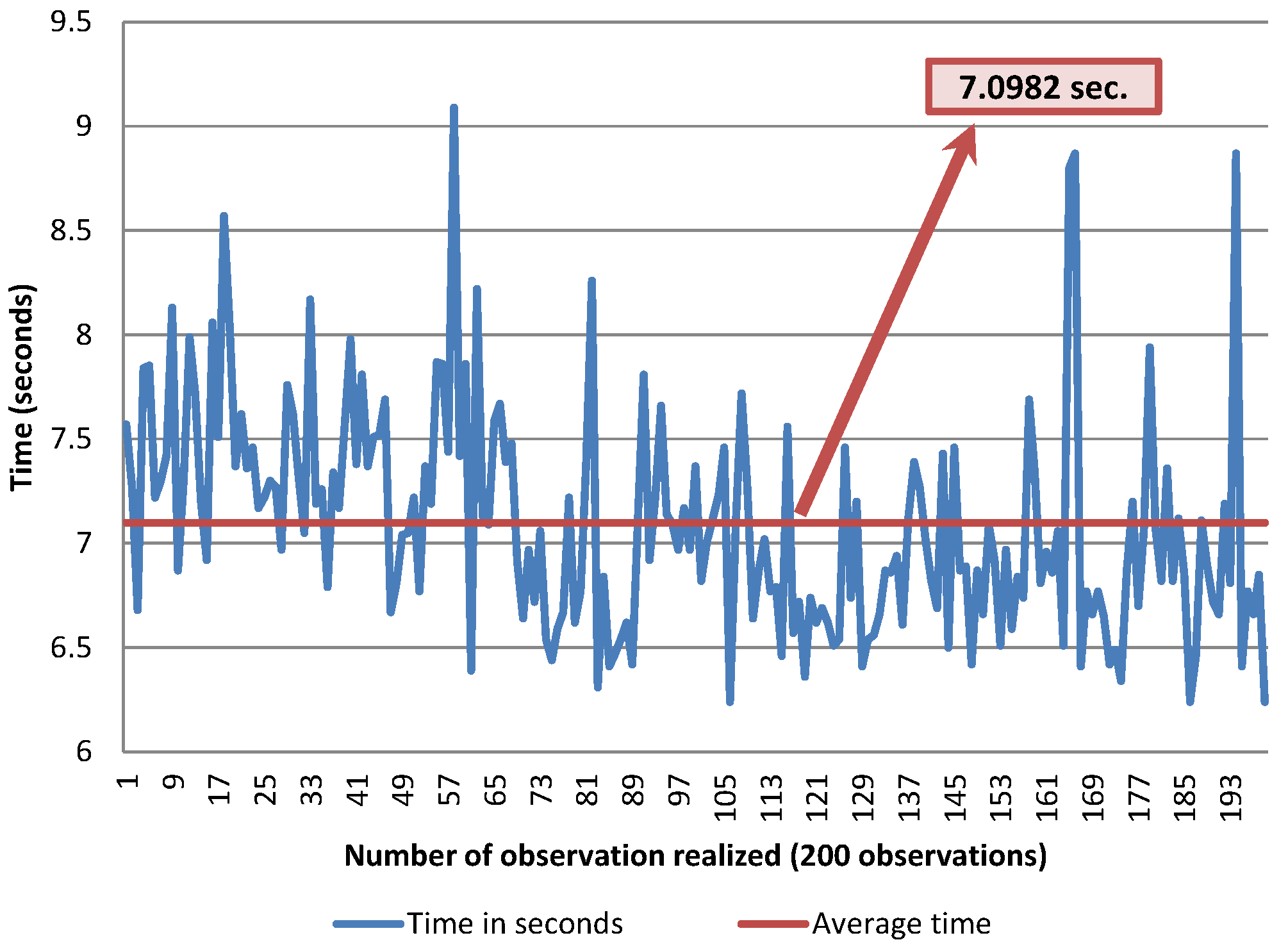
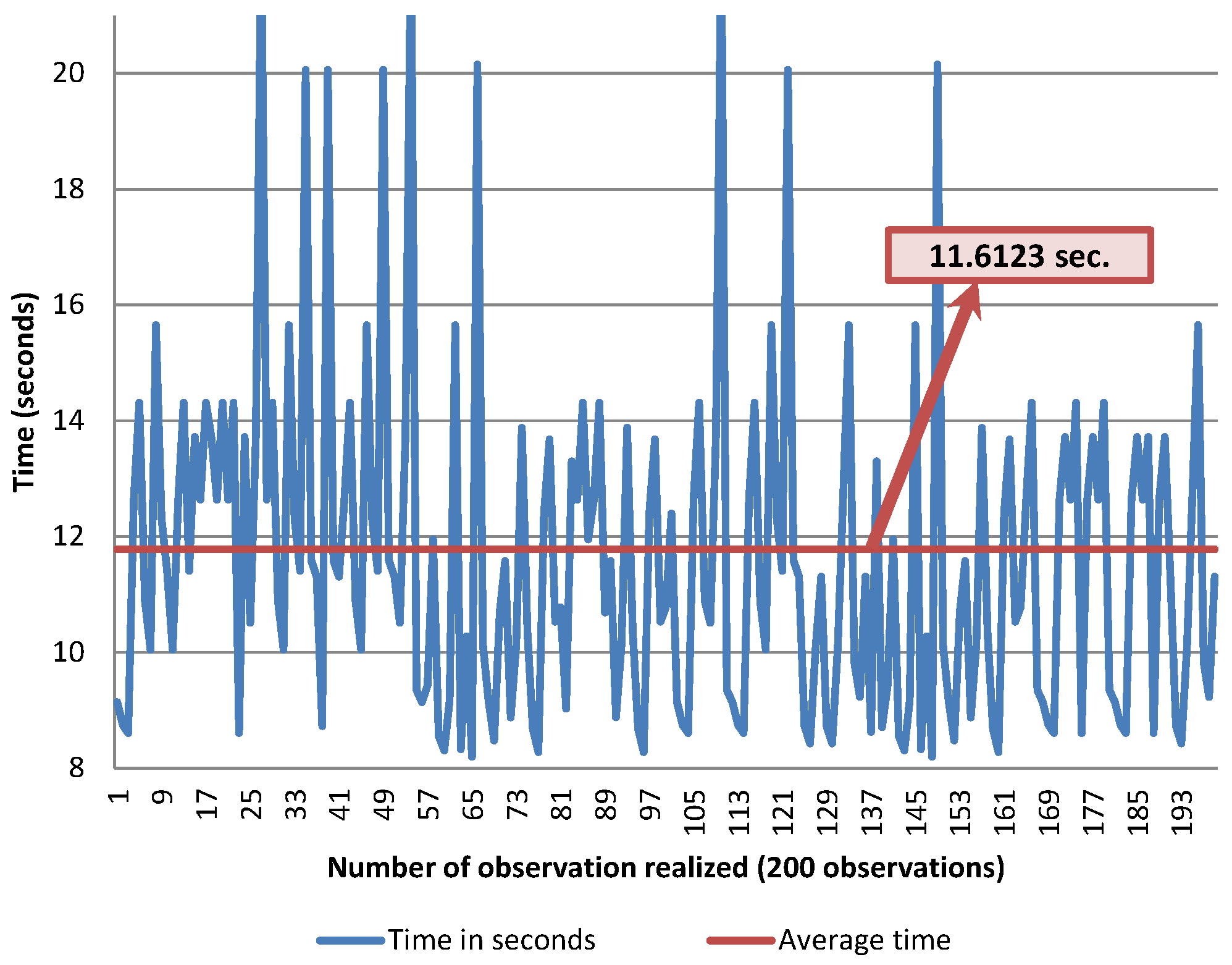
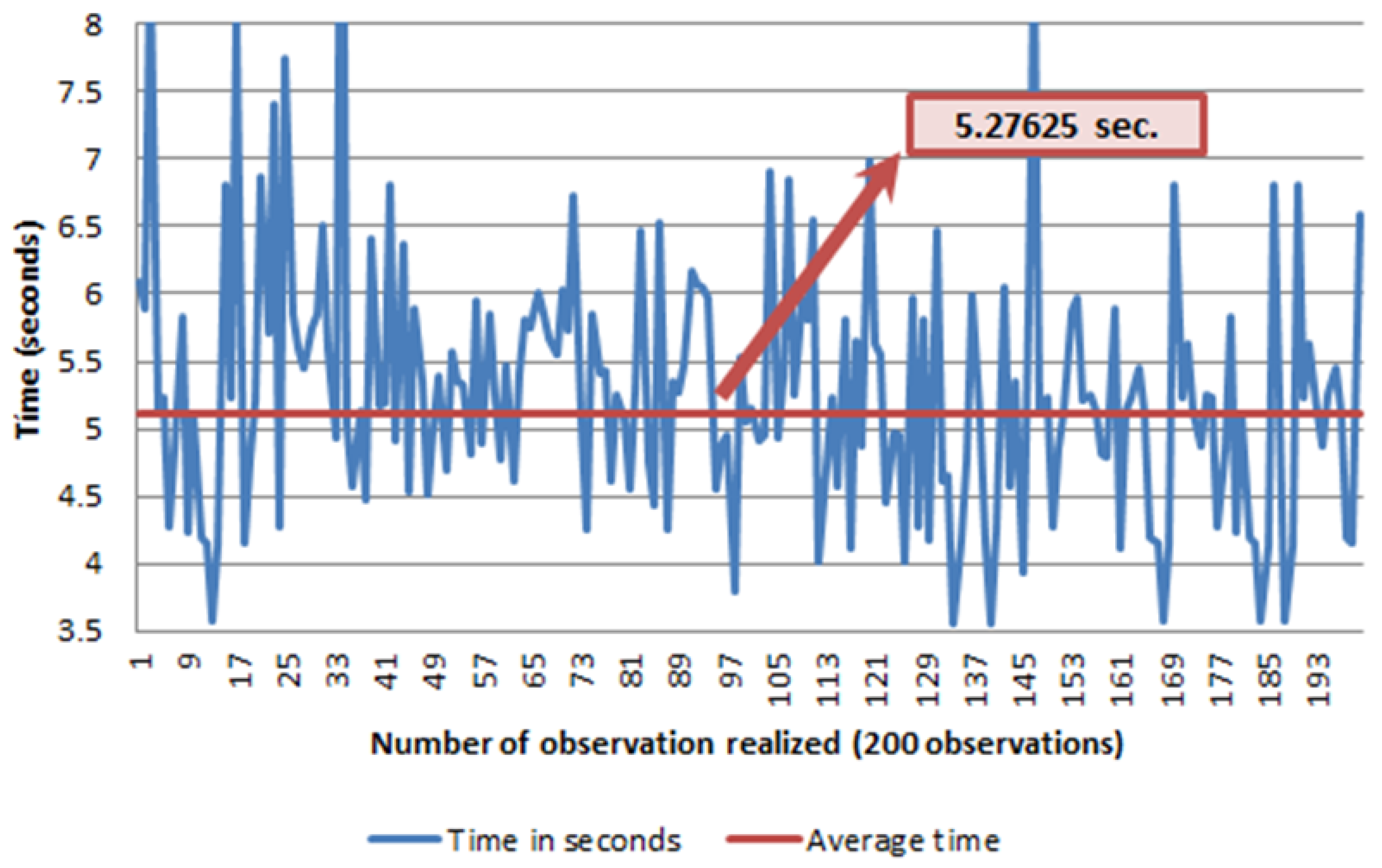
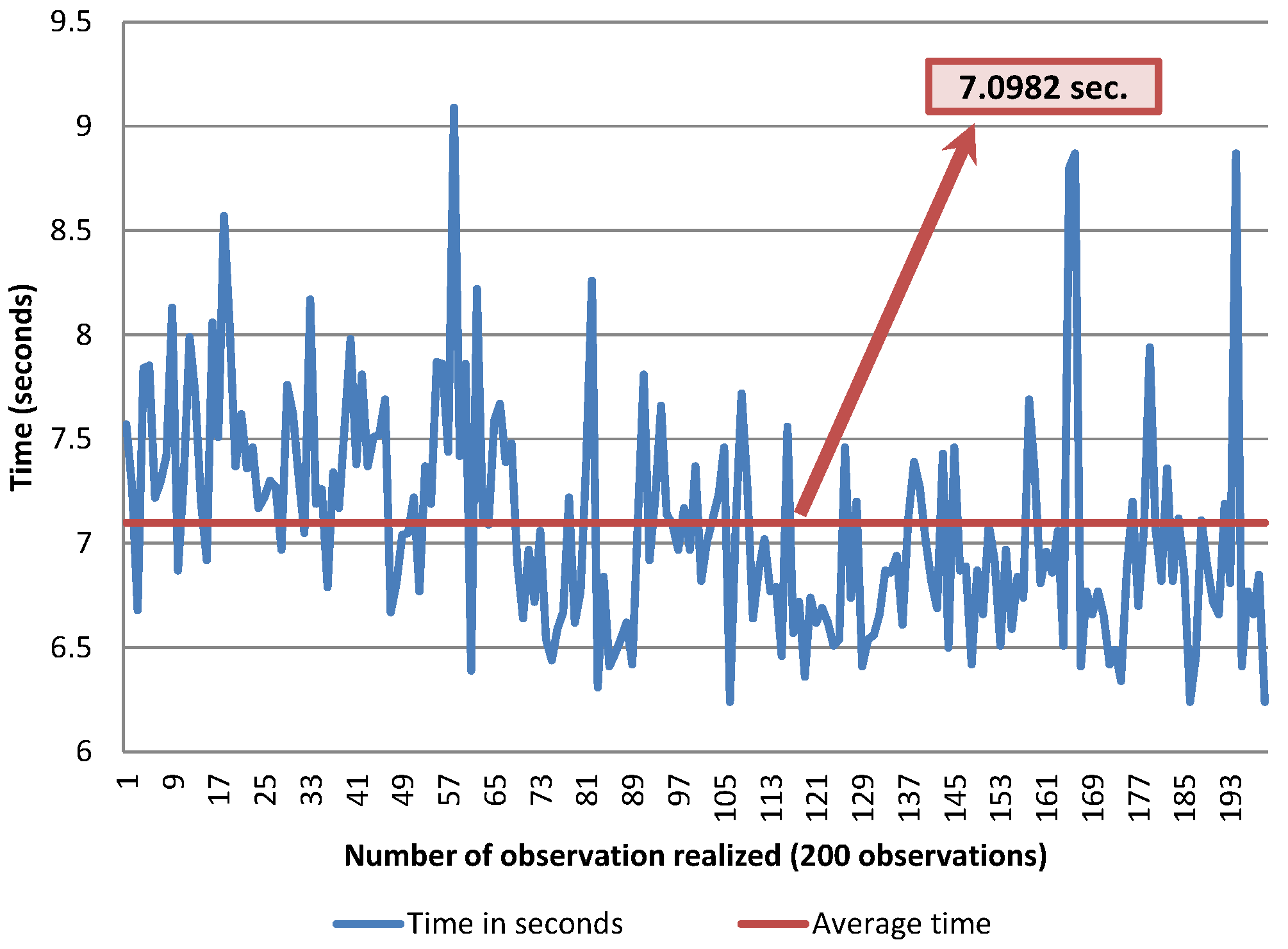
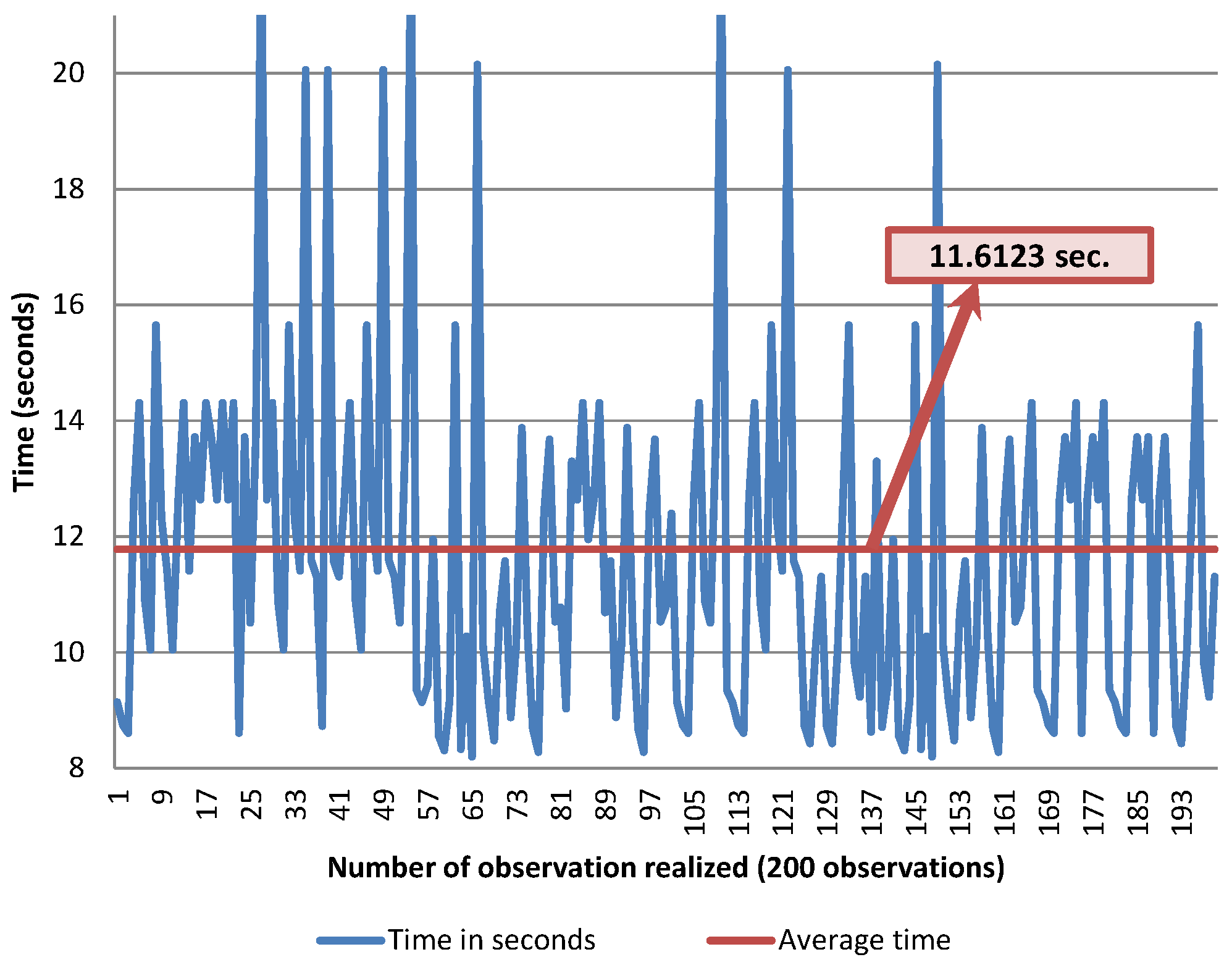
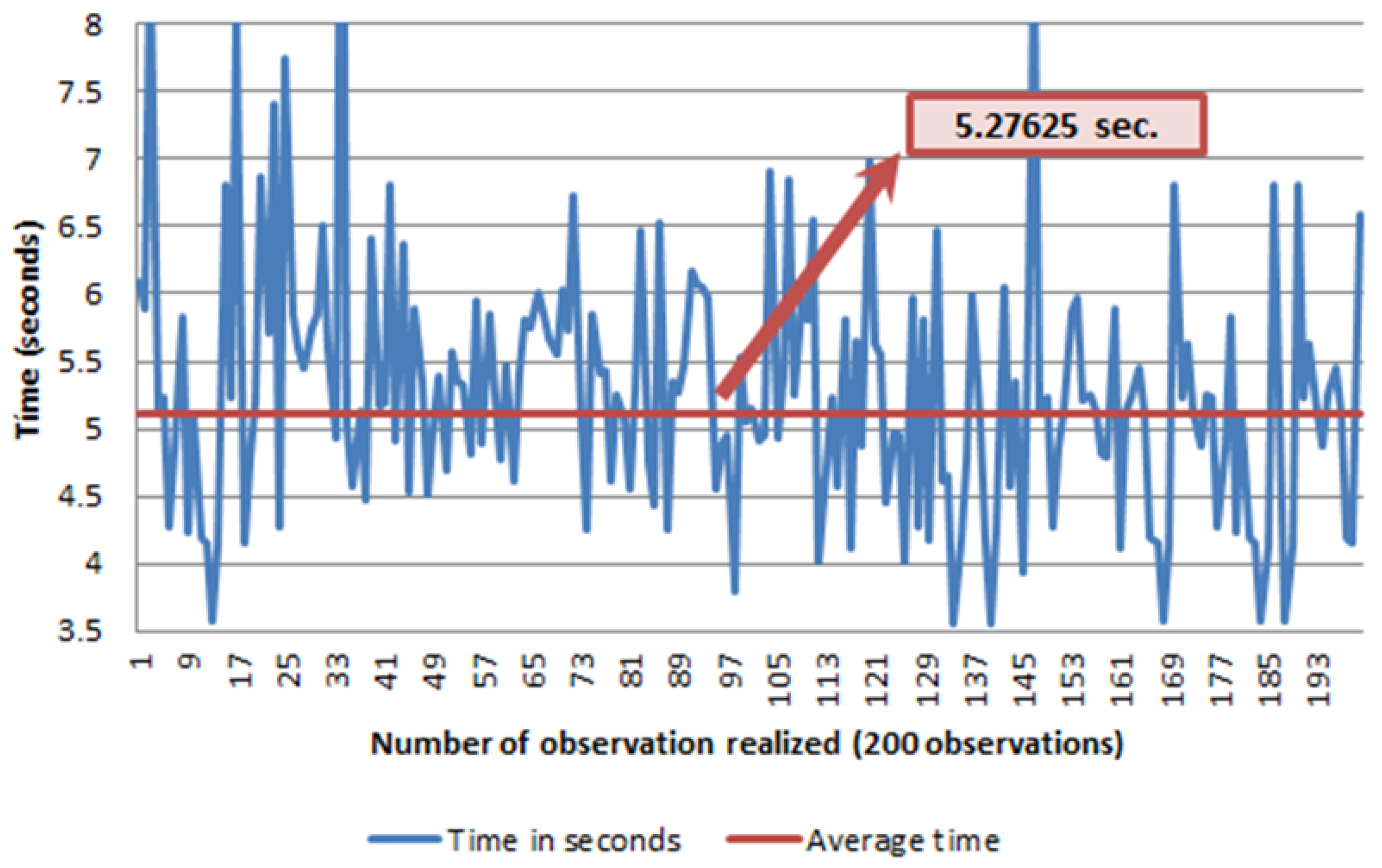
4.3. Average Time When Turning a Page
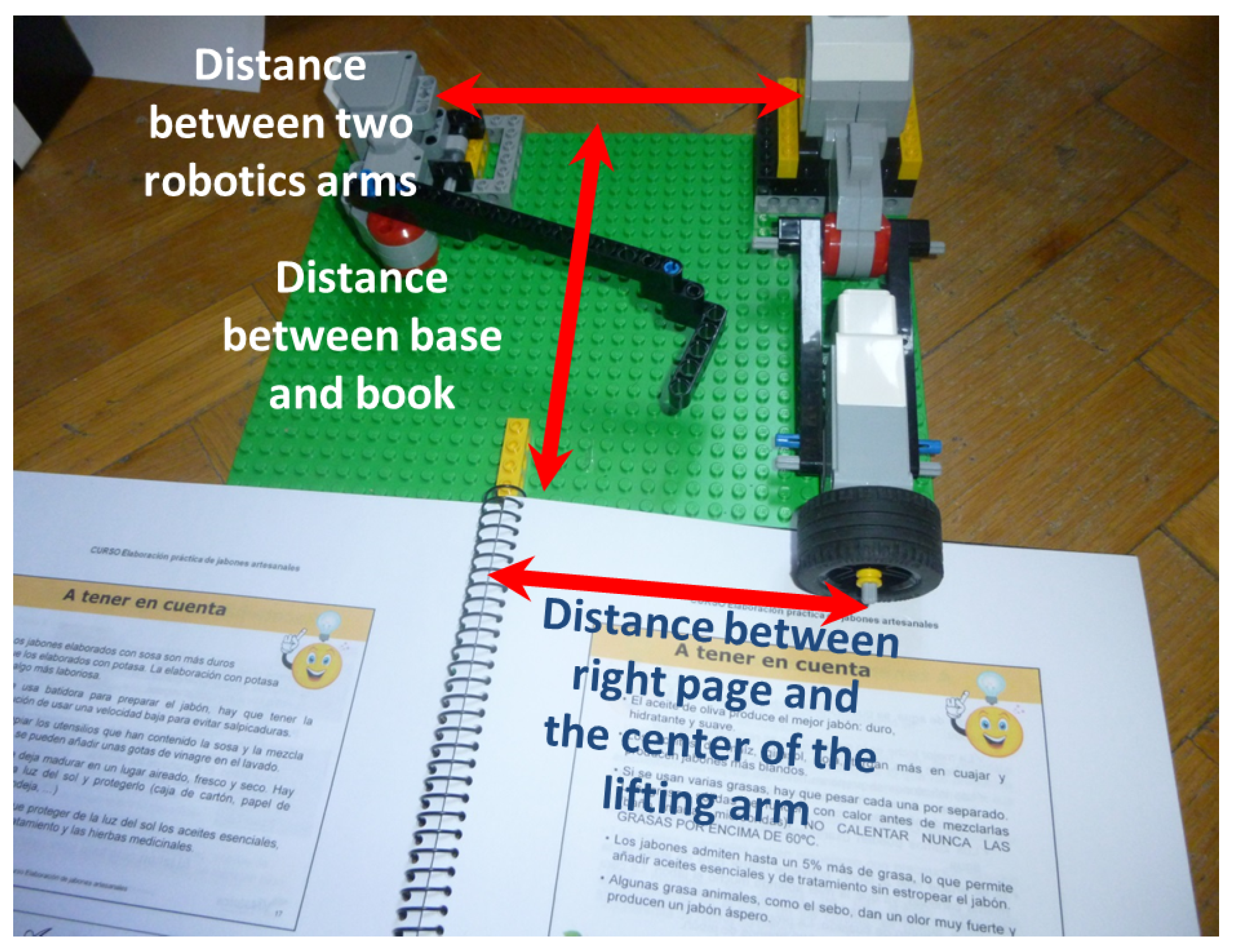
4.4. Arms Location
- A distance of 14 cm between the lifting arm and the right page in the case of 20.5 × 14 cm non-glossy pages with a weight of 120 gr/m.
- A distance of 12 cm for a width of 16.7 cm and a weight of 80 gr/m in non-glossy pages.
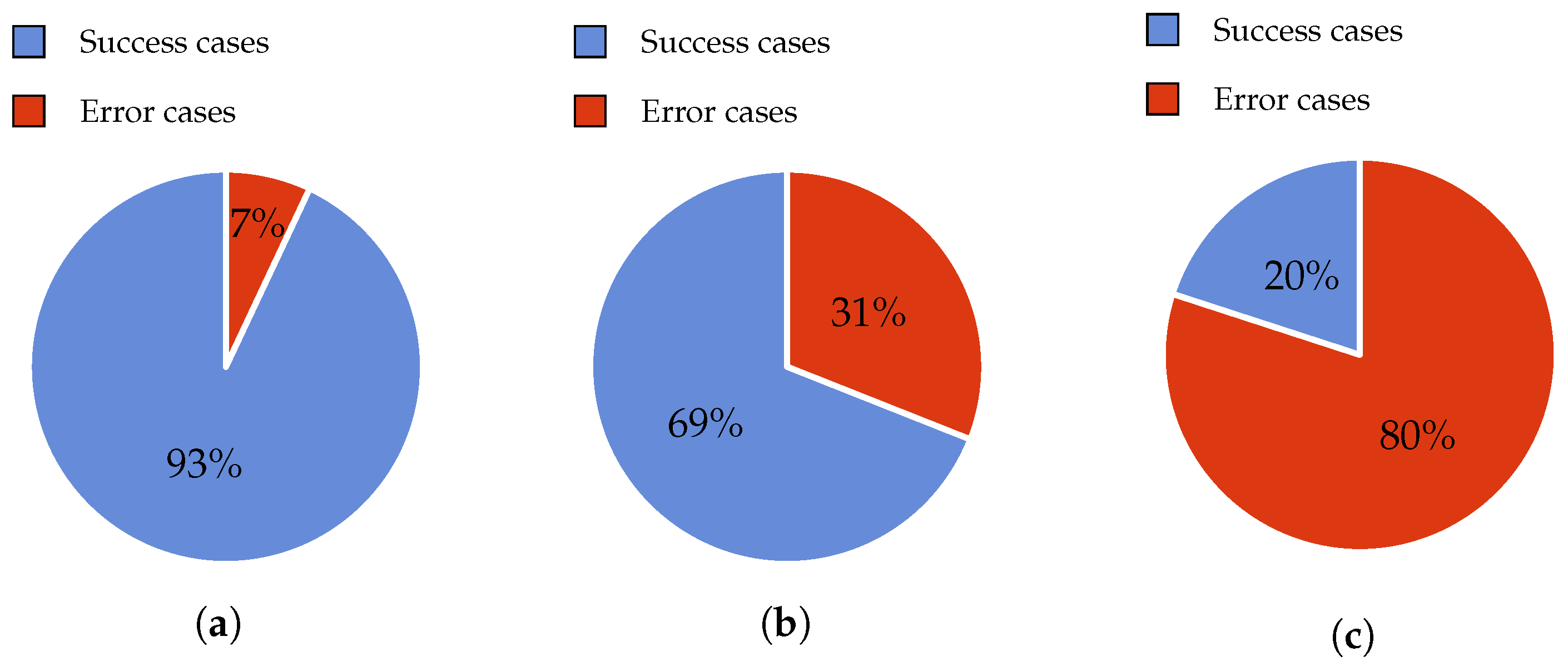
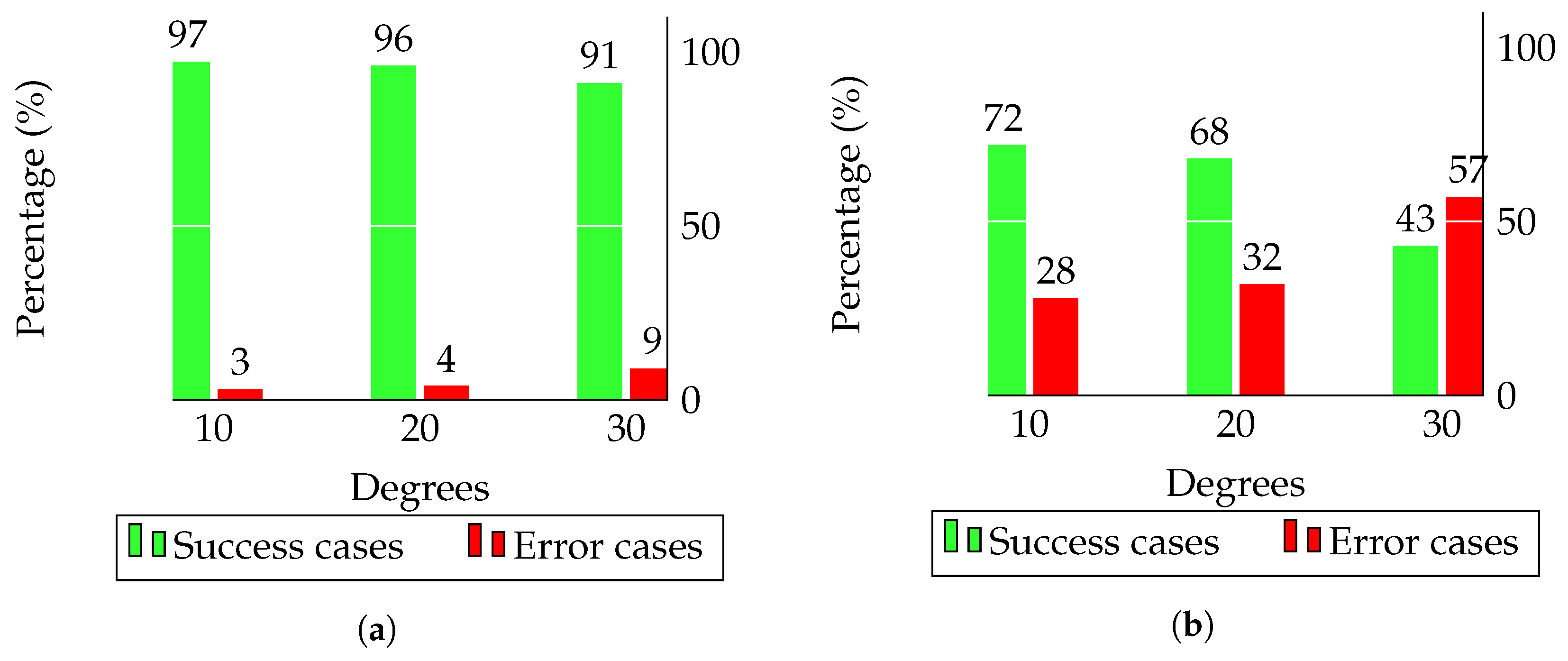
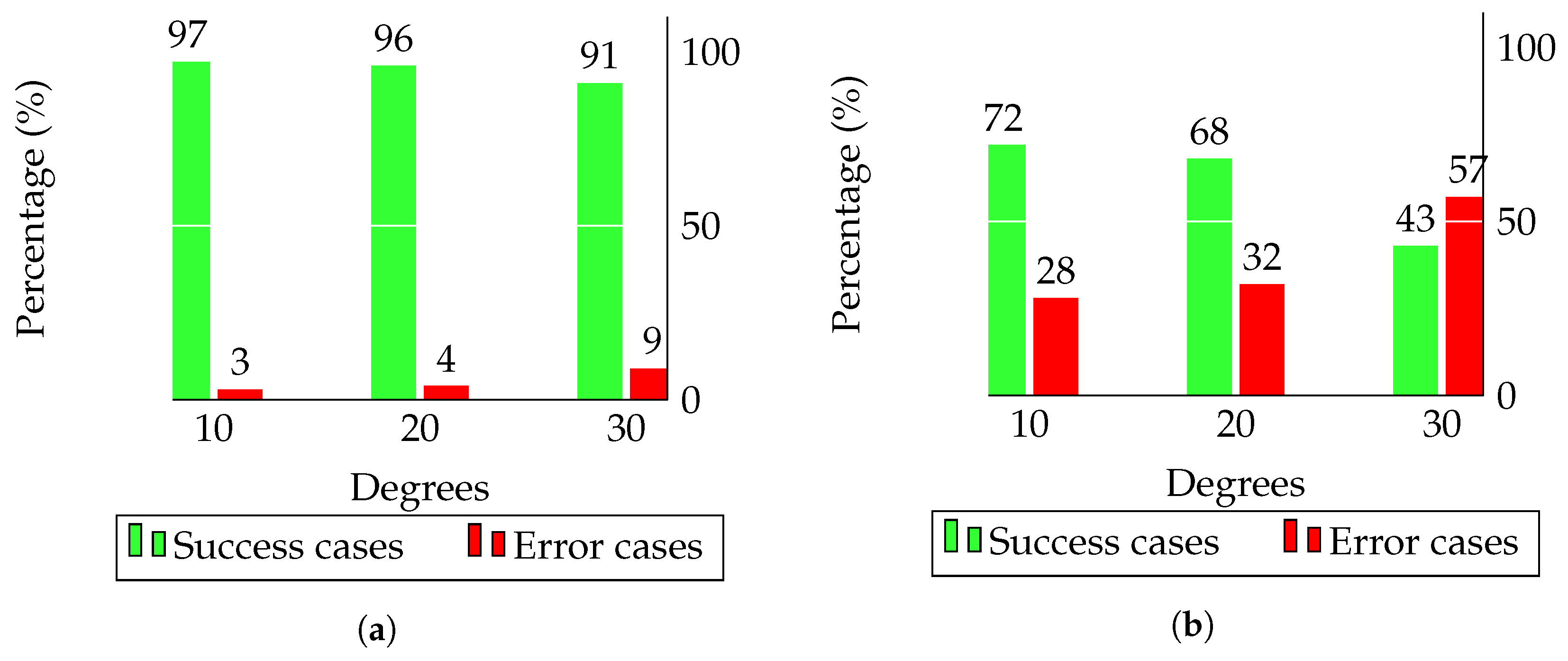
4.5. Testing on an Inclined Surface
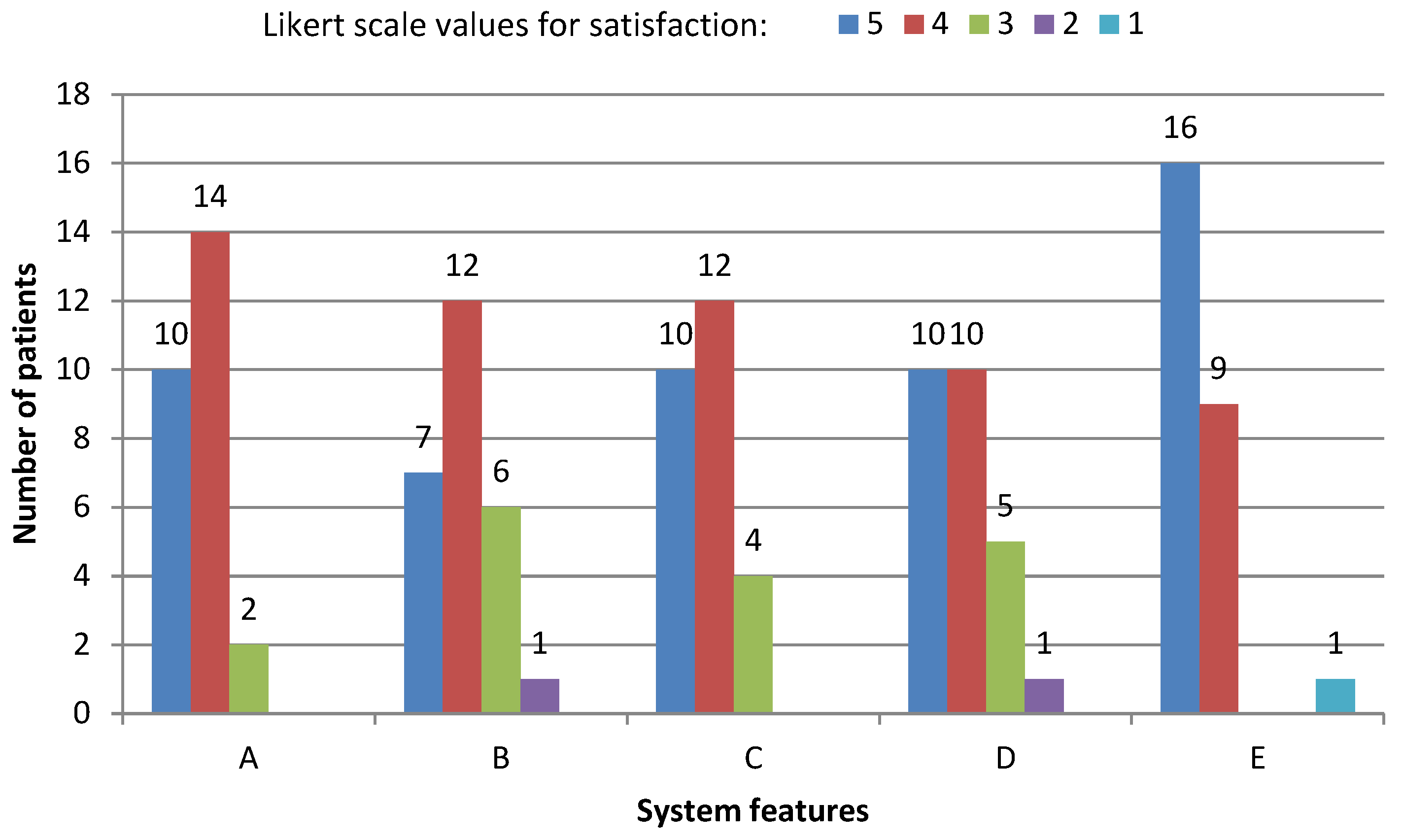
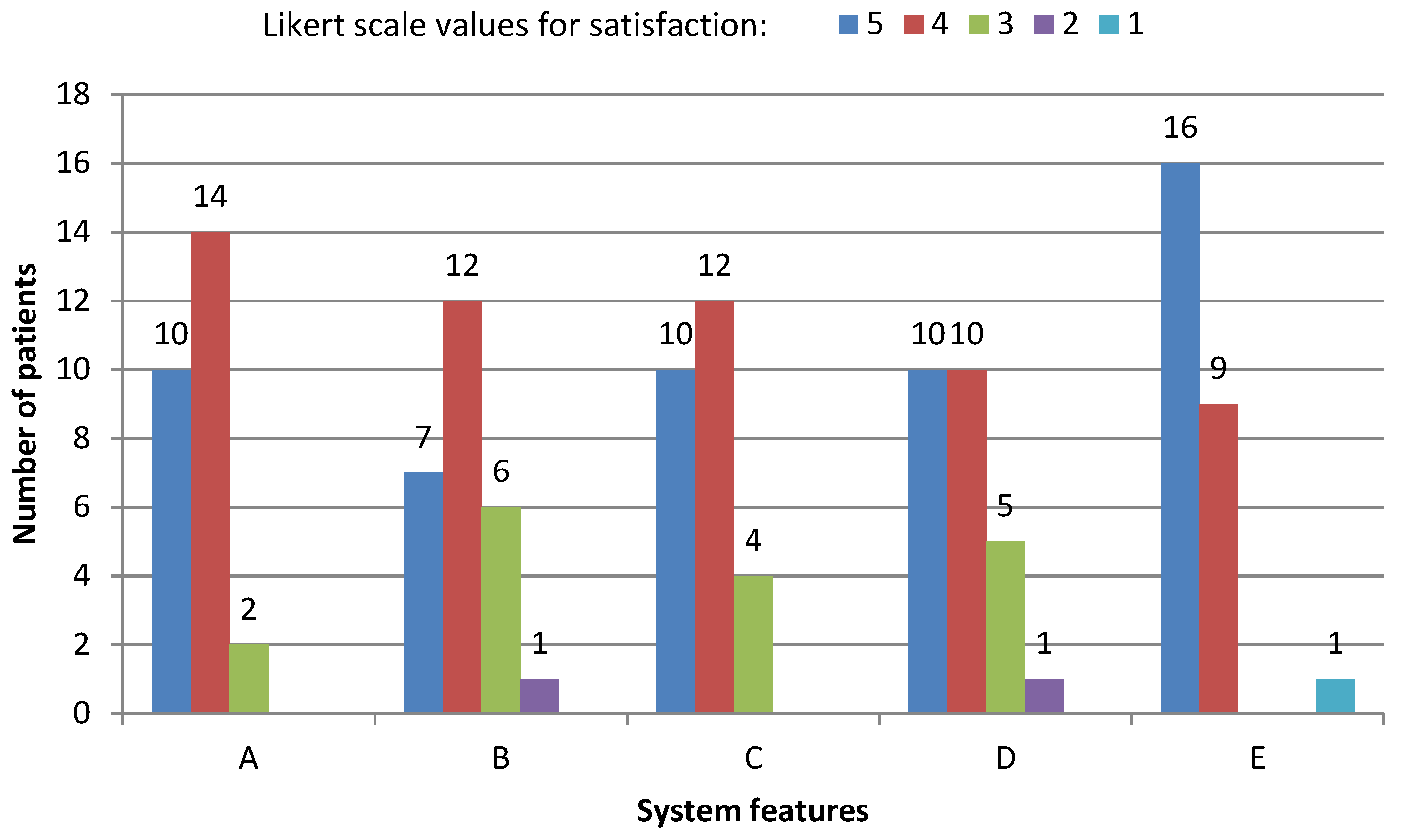
4.6. User Satisfaction
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Survey Completed by Patients

References
- De Lau, L.M.; Breteler, M.M. Epidemiology of Parkinson’s disease. Lancet Neurol. 2006, 5, 525–535. [Google Scholar] [CrossRef]
- De Rijk, M.C.; Launer, L.J.; Berger, K.; Breteler, M.M.; Dartigues, J.F.; Baldereschi, M.; Fratiglioni, L.; Lobo, A.; Martinez-Lage, J.; Trenkwalder, C. Prevalence of Parkinson’s disease in Europe: A collaborative study of population-based cohorts. Neurologic Diseases in the Elderly Research Group. Neurology 2000, 54, S21–S23. [Google Scholar] [PubMed]
- Hornykiewicz, O. Biochemical aspects of Parkinson’s disease. Neurology 1998, 54, S2–S9. [Google Scholar] [CrossRef]
- Benito-León, J.; Louis, E.D. Clinical update: Diagnosis and treatment of essential tremor. Lancet 2007, 369, 1152–1154. [Google Scholar] [CrossRef]
- Benito-León, J.; Louis, E.D. Update on essential tremor. Min. Med. 2011, 102, 417–440. [Google Scholar]
- Benito-León, J. Essential tremor: One of the most common neurodegenerative diseases? Neuroepidemiology 2011, 36, 77–78. [Google Scholar]
- Casamitjana, C.F.; García, S.; Méndez, A.Z.; Salazar, M.H.; Suárez, S.S.; Dávalos, E.M.; Ortiz, C.G.; Venegas, J.B.; Granados, F.J.; Cervantes, J.H.; et al. Calidad de vida en pacientes con enfermedad de Parkinson y estimulación cerebral profunda. Med. Interna Méx. 2007, 23, 7–14. [Google Scholar]
- Mayeux, R.; Stern, Y.; Rosen, J.; Leventhal, J. Depression, intellectual impairment, and Parkinson disease. Neurology 1981, 31, 645. [Google Scholar] [CrossRef] [PubMed]
- Cummings, J.L. Depression and Parkinson’s disease: A review. Am. J. Psychiatry 1992, 149, 443. [Google Scholar] [PubMed]
- Davidsdottir, S.; Cronin-Golomb, A.; Lee, A. Visual and spatial symptoms in Parkinson’s disease. Vis. Res. 2005, 45, 1285–1296. [Google Scholar] [CrossRef] [PubMed]
- Barnard, Y.; Bradley, M.D.; Hodgson, F.; Lloyd, A.D. Learning to use new technologies by older adults: Perceived difficulties, experimentation behaviour and usability. Comput. Hum. Behav. 2013, 29, 1715–1724. [Google Scholar] [CrossRef]
- Algoet, C.; Lerinckx, D.; Vandooren, F. Using Mobile Devices for Reading eBooks: An Experiment with eReaders and Netbooks; DIfusion, Universite libre de Bruxelles: Brussels, Belgium, 2011. [Google Scholar]
- Mangen, A.; Walgermo, B.R.; Brønnick, K. Reading linear texts on paper versus computer screen: Effects on reading comprehension. Int. J. Educ. Res. 2013, 58, 61–68. [Google Scholar] [CrossRef]
- Jabr, F. Why the brain prefers paper. Sci. Am. 2013, 309, 48–53. [Google Scholar] [CrossRef] [PubMed]
- Hillesund, T. Digital reading spaces: How expert readers handle books, the Web and electronic paper. First Monday 2010, 15. [Google Scholar] [CrossRef]
- Billingsley, M.K. Proust and the Squid: The Story and Science of the Reading Brain. J. Am. Acad. Child Adolesc. Psychiatry 2009, 48, 1202–1203. [Google Scholar] [CrossRef]
- Nolan, P.M. Development of a Mobile Speech Therapy Application-Encouraging Louder Communication in Parkinson’s Patients. In Proceedings of the Medicine 2.0 Conference, Toronto, ON, Canada, 21–27 March 2013. [Google Scholar]
- Ustinova, K.; Chernikova, L.; Bilimenko, A.; Telenkov, A.; Epstein, N. Effect of robotic locomotor training in an individual with Parkinson’s disease: A case report. Disabil. Rehabil. Assist. Technol. 2011, 6, 77–85. [Google Scholar] [CrossRef] [PubMed]
- Picelli, A.; Tamburin, S.; Passuello, M.; Waldner, A.; Smania, N. Robot-assisted arm training in patients with Parkinson’s disease: A pilot study. J. Neuro Eng. Rehabil. 2014, 11, 28. [Google Scholar] [CrossRef] [PubMed]
- Kiguchi, K.; Hayashi, Y.; Asami, T. An upper-limb power-assist robot with tremor suppression control. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics (ICORR), Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar]
- Gallego, J.Á.; Ibanez, J.; Dideriksen, J.L.; Serrano, J.I.; del Castillo, M.D.; Farina, D.; Rocon, E. A multimodal human-robot interface to drive a neuroprosthesis for tremor management. Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 42, 1159–1168. [Google Scholar] [CrossRef]
- Riviere, C.N.; Thakor, N.V. Modeling and canceling tremor in human-machine interfaces. IEEE Eng. Med. Biol. Mag. 1996, 15, 29–36. [Google Scholar] [CrossRef]
- Pons, J.L.; Rocon, E.; Ruiz, A.F.; Moreno, J.C. Upper-Limb Robotic Rehabilitation Exoskeleton Tremor Suppression; Rehabilitation Robotics, INTECH Education and Publishing: Vienna, Austria, 2007; p. 648. [Google Scholar]
- Dexter Industries. BrickPi Bookreader 2. 2014. Available online: http://www.dexterindustries.com/BrickPi/projects/brickpi-bookreader-2/ (accessed on 15 February 2017).
- Lego. LEGO MINDSTORMS EV3. 2013. Available online: http://www.lego.com/en-us/mindstorms/about-ev3 (accessed on 15 February 2017).
- Laamanen, M. Architecture for Theatre Robotics. Master’s Thesis, University of Eastern Finland, Joensuu, Finland, 2015. [Google Scholar]
- Reshko, G.; Mason, M.T.; Nourbakhsh, I.R. Rapid Prototyping of Small Robots; The Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 2002. [Google Scholar]
- Schwab, R.S.; England, A.C. Projection technique for evaluating surgery in Parkinson’s disease. In Third Symposium on Parkinson’s Disease; Livingstone: Edinburgh, UK, 1969; pp. 152–157. [Google Scholar]
- Fahn, S.; Tolosa, E.; Marín, C. Clinical rating scale for tremor. Parkinson’s Disease and Movement Disorders; Williams and Wilkins: Baltimore, MD, USA, 1993; pp. 271–280. [Google Scholar]
- Likert, R. A technique for the measurement of attitudes. Arch. Psychol. 1932, 22, 55. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight (gr/m2) | Glossy Page | Distance between the Center of the Lifting Arm and Right Page (cm) | Average Time | Success Rate |
|---|---|---|---|---|
| 80 | Yes | 10 | 12.8562 | 94% |
| 80 | Yes | 11 | 12.9456 | 83% |
| 80 | Yes | 12 | 13.0127 | 75% |
| 80 | Yes | 13 | 12.8754 | 69% |
| 80 | Yes | 14 | 12.8652 | 57% |
| 80 | No | 10 | 7.0124 | 87% |
| 80 | No | 11 | 7.0235 | 92% |
| 80 | No | 12 | 7.0982 | 96% |
| 80 | No | 13 | 7.1623 | 92% |
| 80 | No | 13 | 7.2156 | 91% |
| 70 | Yes | 10 | 11.2156 | 92% |
| 70 | Yes | 11 | 11.6879 | 82% |
| 70 | Yes | 12 | 11.9564 | 74% |
| 70 | Yes | 13 | 11.8754 | 65% |
| 70 | Yes | 14 | 11.6523 | 48% |
| 70 | No | 10 | 7.2156 | 93% |
| 70 | No | 11 | 7.3956 | 93% |
| 70 | No | 12 | 7.4181 | 95% |
| 70 | No | 13 | 7.4536 | 91% |
| 70 | No | 14 | 7.5689 | 90% |
| 65 | Yes | 10 | 11.4948 | 93% |
| 65 | Yes | 11 | 11.2244 | 84% |
| 65 | Yes | 12 | 11.8509 | 83% |
| 65 | Yes | 13 | 11.2208 | 62% |
| 65 | Yes | 14 | 11.1031 | 54% |
| 65 | No | 10 | 8.1256 | 95% |
| 65 | No | 11 | 8.2378 | 96% |
| 65 | No | 12 | 8.2965 | 97% |
| 65 | No | 13 | 8.3546 | 92% |
| 65 | No | 14 | 8.5645 | 88% |
| Patient | Age | DD | Disease | SE | FTM | TT | TTS | A | B | C | D | E |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 77 | 20 | ET | NA | 7 | 70 | 71 | 5 | 3 | 4 | 4 | 4 |
| 2 | 86 | 10 | ET | NA | 15 | 90 | 82 | 5 | 5 | 4 | 5 | 5 |
| 3 | 75 | 1 | PD | 80 | NA | 60 | 79 | 5 | 4 | 4 | 4 | 4 |
| 4 | 83 | 4 | PD | 80 | NA | 48 | 74 | 5 | 4 | 5 | 5 | 5 |
| 5 | 82 | 7 | ET | NA | 17 | 146 | 81 | 4 | 5 | 5 | 3 | 5 |
| 6 | 78 | 7 | ET | NA | 8 | 27 | 72 | 4 | 3 | 3 | 3 | 4 |
| 7 | 64 | 4 | ET | NA | 5 | 32 | 75 | 4 | 2 | 3 | 2 | 1 |
| 8 | 84 | 2 | PD | 70 | NA | 44 | 73 | 5 | 4 | 4 | 5 | 5 |
| 9 | 82 | 3 | PD | 60 | NA | 65 | 71 | 5 | 4 | 3 | 4 | 5 |
| 10 | 81 | 4 | ET | NA | 12 | 80 | 74 | 5 | 4 | 4 | 3 | 4 |
| 11 | 70 | 4 | PD | 60 | NA | 67 | 71 | 4 | 5 | 4 | 4 | 4 |
| 12 | 73 | 9 | ET | NA | 6 | 32 | 75 | 4 | 4 | 5 | 4 | 5 |
| 13 | 64 | 10 | PD | 80 | NA | 17 | 72 | 4 | 3 | 5 | 4 | 5 |
| 14 | 71 | 35 | ET | NA | 7 | 36 | 79 | 4 | 3 | 4 | 3 | 5 |
| 15 | 56 | 27 | ET | NA | 11 | 43 | 81 | 3 | 5 | 5 | 5 | 5 |
| 16 | 51 | 10 | ET | NA | 4 | 12 | 73 | 4 | 5 | 4 | 3 | 5 |
| 17 | 61 | 10 | PD | 70 | NA | 57 | 83 | 4 | 4 | 5 | 5 | 5 |
| 18 | 67 | 7 | ET | NA | 6 | 23 | 76 | 5 | 5 | 5 | 5 | 5 |
| 19 | 85 | 4 | PD | 50 | NA | 74 | 72 | 4 | 4 | 4 | 5 | 4 |
| 20 | 73 | 12 | PD | 80 | NA | 29 | 74 | 3 | 3 | 4 | 4 | 4 |
| 21 | 91 | 4 | PD | 60 | NA | 19 | 72 | 4 | 3 | 4 | 4 | 4 |
| 22 | 62 | 5 | PD | 80 | NA | 45 | 74 | 4 | 5 | 4 | 5 | 5 |
| 23 | 60 | 20 | ET | NA | 8 | 22 | 73 | 4 | 3 | 3 | 4 | 5 |
| 24 | 71 | 8 | PD | 80 | NA | 17 | 77 | 5 | 3 | 5 | 5 | 4 |
| 25 | 72 | 4 | PD | 70 | NA | 124 | 75 | 4 | 4 | 5 | 4 | 5 |
| 26 | 81 | 9 | PD | 70 | NA | 140 | 75 | 5 | 3 | 5 | 5 | 5 |
| Averages | 73.1 | 9.2 | 70.7 | 8.8 | 54.6 | 75.2 | 4.3 | 3.9 | 4.2 | 4.1 | 4.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parrales Bravo, F.; Del Barrio García, A.A.; Gallego de la Sacristana, M.; López Manzanares, L.; Vivancos, J.; Ayala Rodrigo, J.L. Support System to Improve Reading Activity in Parkinson’s Disease and Essential Tremor Patients. Sensors 2017, 17, 1006. https://doi.org/10.3390/s17051006
Parrales Bravo F, Del Barrio García AA, Gallego de la Sacristana M, López Manzanares L, Vivancos J, Ayala Rodrigo JL. Support System to Improve Reading Activity in Parkinson’s Disease and Essential Tremor Patients. Sensors. 2017; 17(5):1006. https://doi.org/10.3390/s17051006
Chicago/Turabian StyleParrales Bravo, Franklin, Alberto A. Del Barrio García, Mercedes Gallego de la Sacristana, Lydia López Manzanares, José Vivancos, and José Luis Ayala Rodrigo. 2017. "Support System to Improve Reading Activity in Parkinson’s Disease and Essential Tremor Patients" Sensors 17, no. 5: 1006. https://doi.org/10.3390/s17051006