
SWARMs Ontology: A Common Information Model for the Cooperation of Underwater Robots


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. The Need for Semantic Interoperability in the Cooperation of Underwater Robots
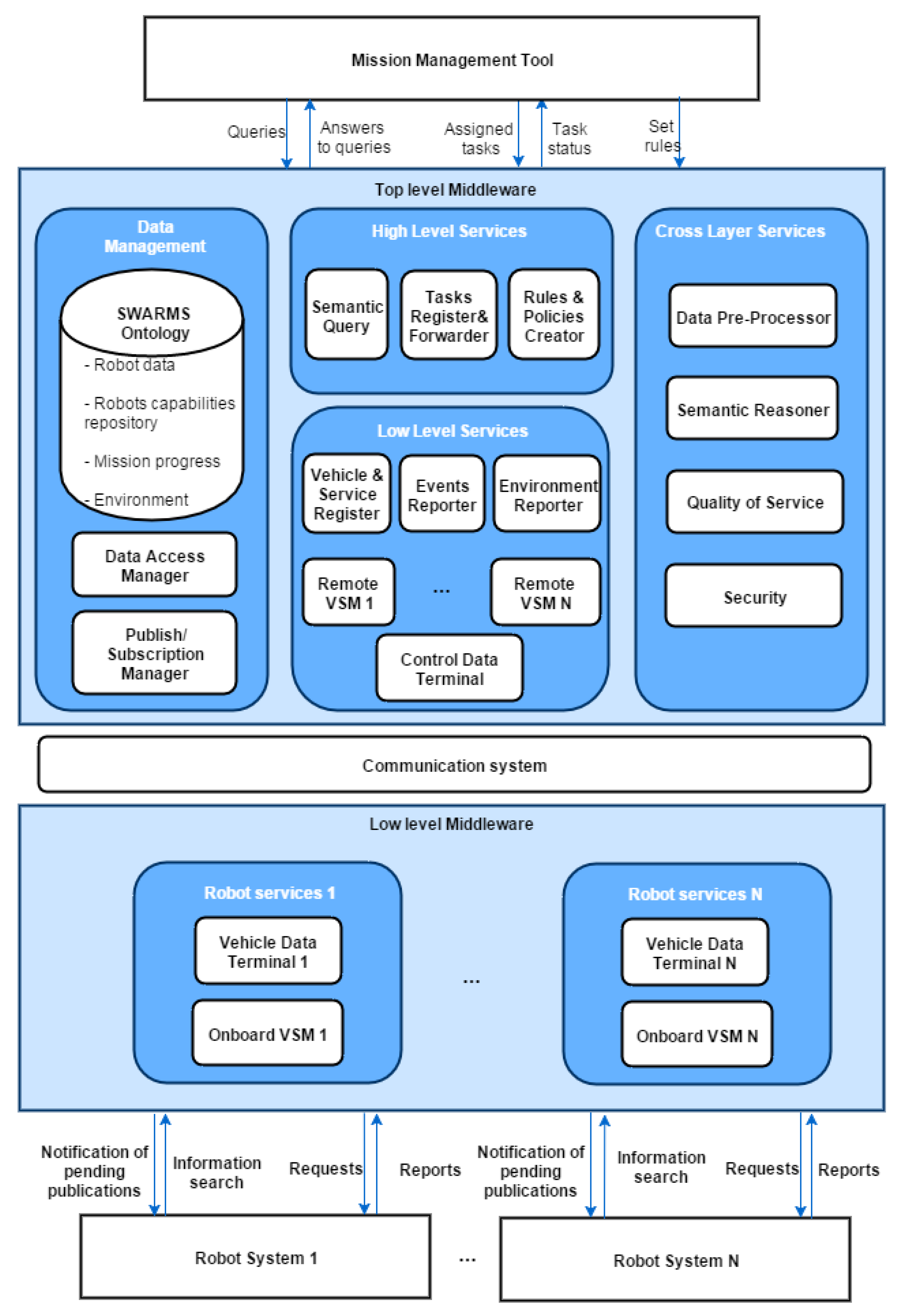
1.2. The SWARMs Approach
1.3. Contributions Offered in This Paper
- Thorough analysis of the domain and purpose of the SWARMs ontology and its requirements, including functional and non-functional requirements;
- Presentation of the SWARMs ontology, which is a network of different ontologies, along with brief descriptions of its main concepts and relationships; and
- Exploration of the applicability and extensibility of the SWARMs ontology by using a chemical pollution use case and a preliminary proof of its capability of supporting different context reasoning methods, including ontological, rule-based, and MEBN reasoning.
2. Related Work
2.1. Existing Ontologies for the Cooperation and Coordination of Underwater Robots
2.2. Existing Solutions for Modeling Uncertainties
3. Modeling Considerations for the SWARMs Ontology
3.1. Ontology Purpose and Scope
3.2. Ontology Requirements
3.2.1. Non-Functional Requirements
3.2.2. Functional Requirements
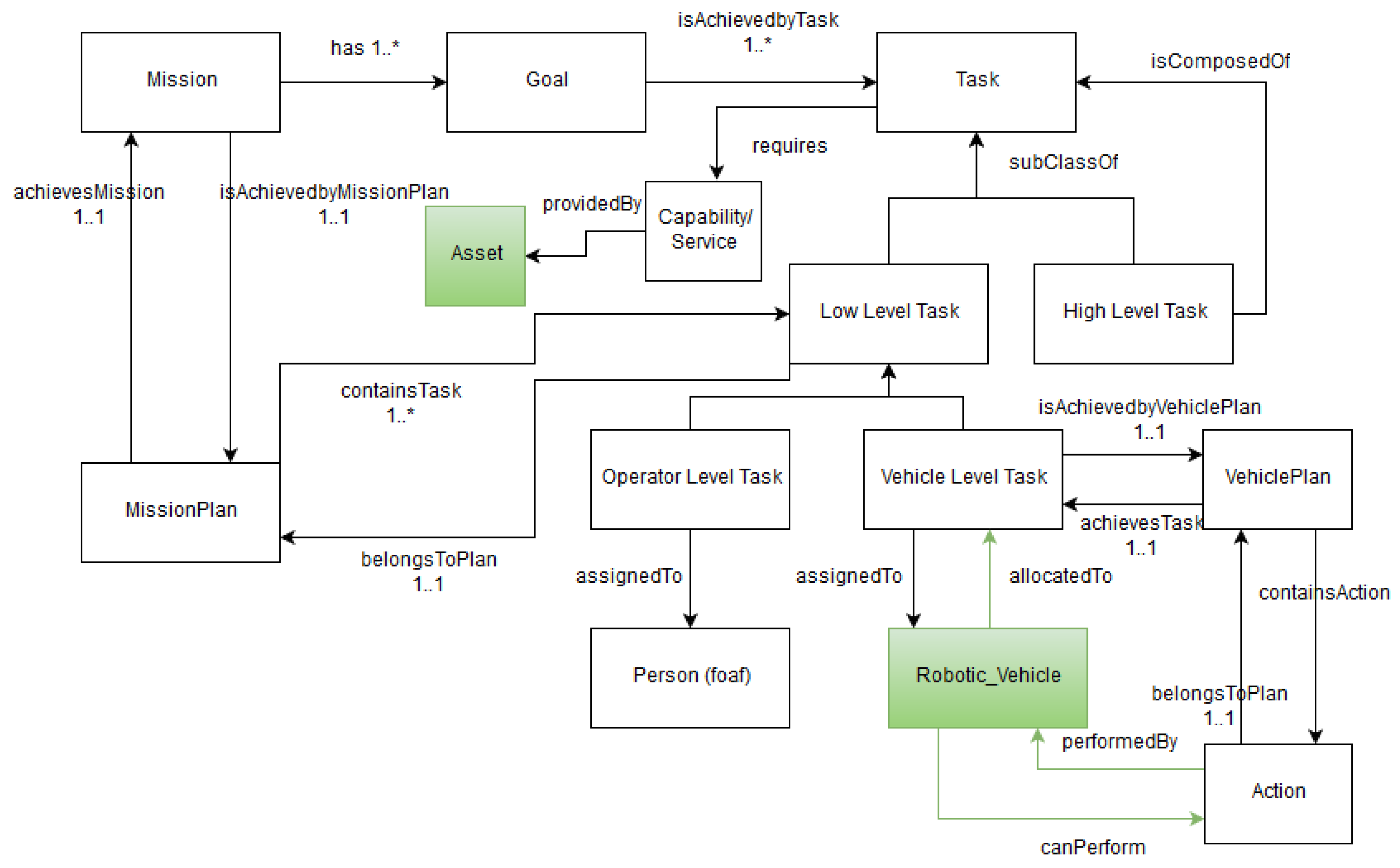
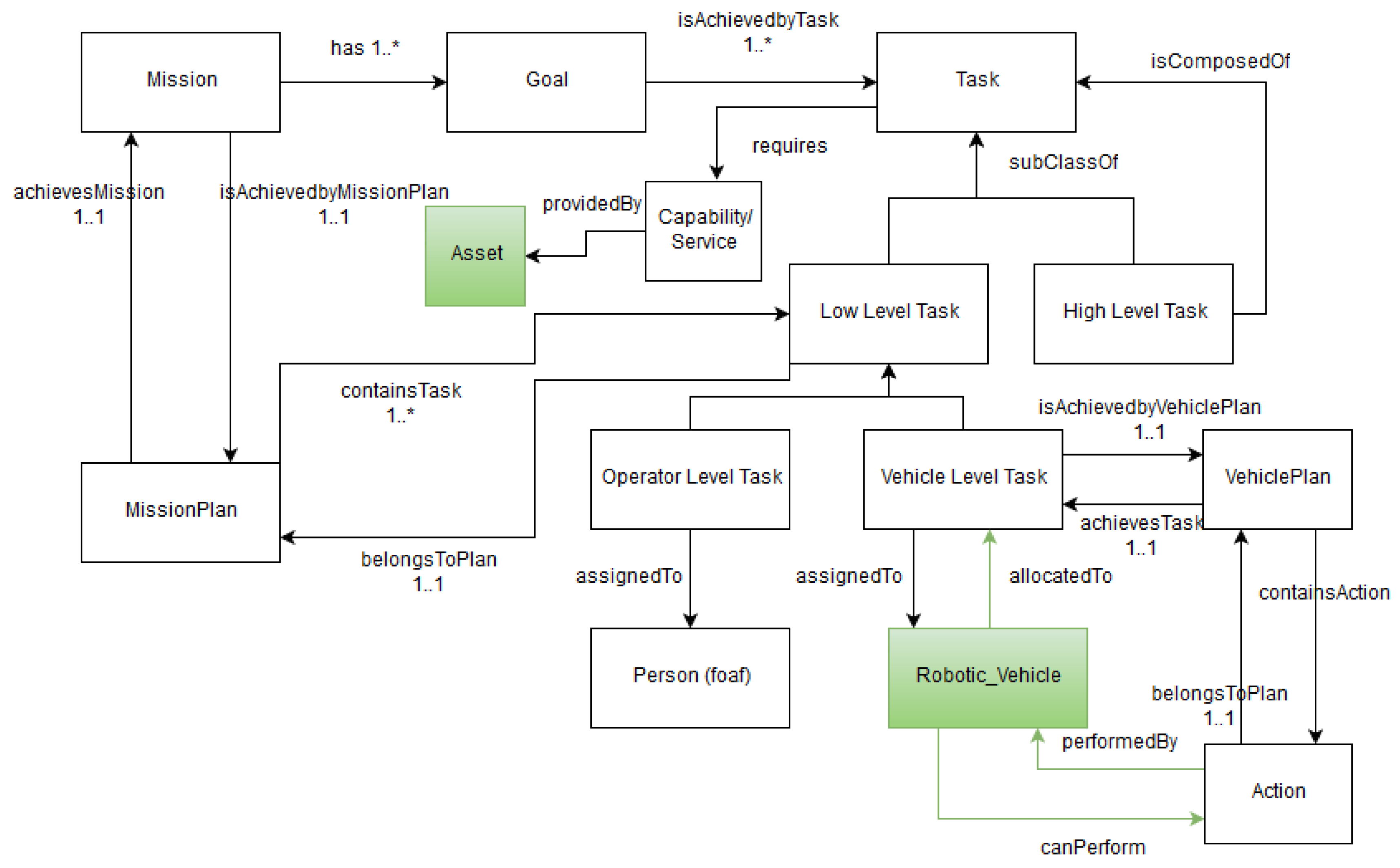
- The SWARMs ontology must provide the mission and planning modeling. Two levels of abstraction of the mission and planning can be described by the SWARMs ontology. Firstly, the high-level planning that allows the user to describe different tasks regarding operations performed by a set of robotic vehicles without specifying the exact actions that each robotic vehicle needs to perform. The output of the high-level planning is a global mission plan consisting of the tasks that the swarm of robotic vehicles needs to perform. Secondly, low-level planning that is carried out at the robotic vehicle level and includes generation of waypoints, actions, and other similar low-level tasks. The output of the low-level planning is a vehicle plan. The mission and planning procedure needs to be decomposed and well represented in the SWARMs ontology so that vehicles can share tasks/operations/actions and understand them in the same manner so that cooperation and coordination could be fostered.
- The SWARMs ontology must provide a well-defined classification for the robots and vehicles that are used in the different missions and their attributes. Any information that could be useful for operators to understand the vehicles and their conditions is modeled in the SWARMs ontology. Different properties used to describe vehicles, such as motorized, propelled, non-motorized, speed, position, battery level, equipment, capabilities, and sensors onboard, are modeled with semantic annotations in the SWARMs ontology.
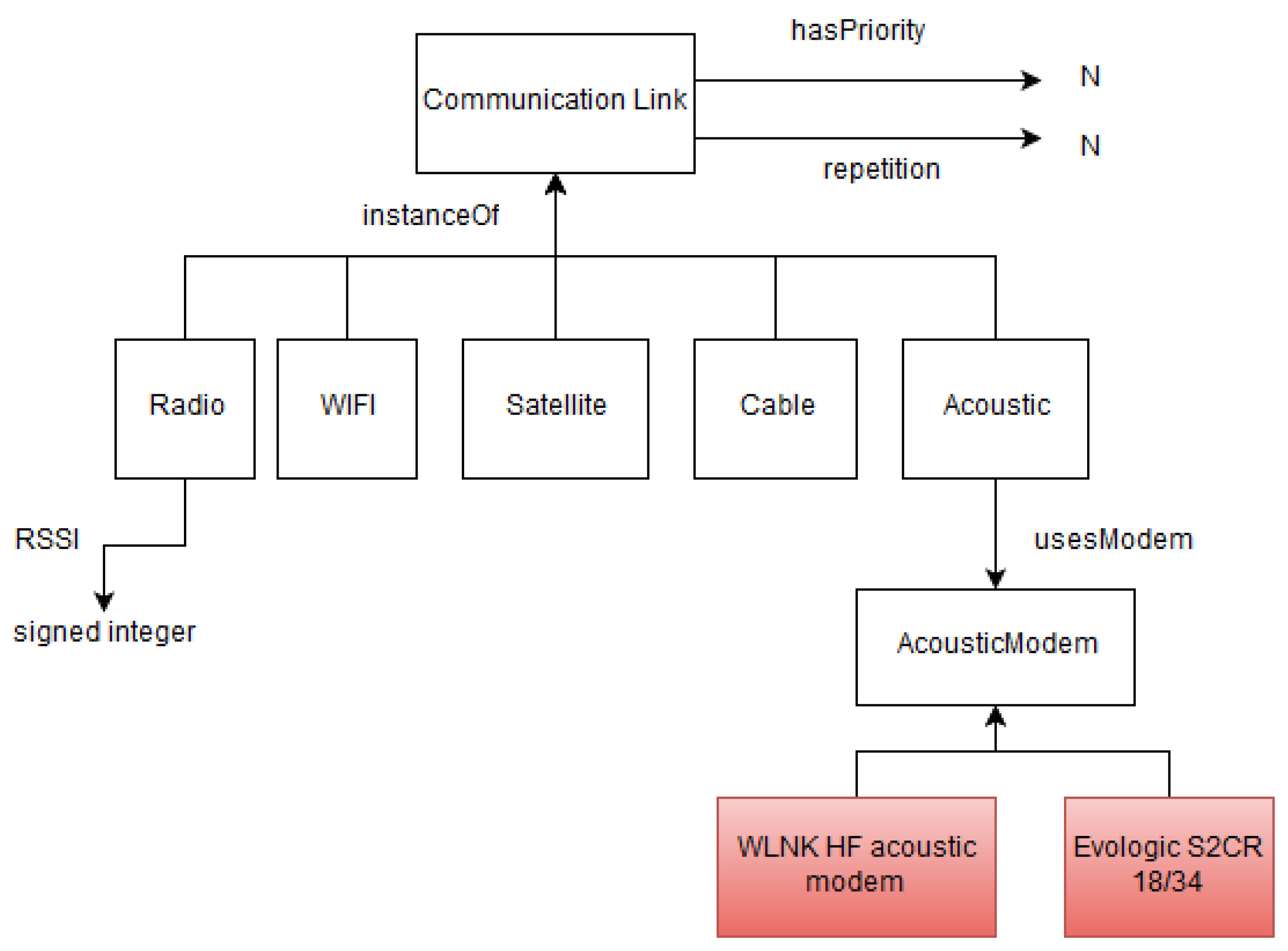
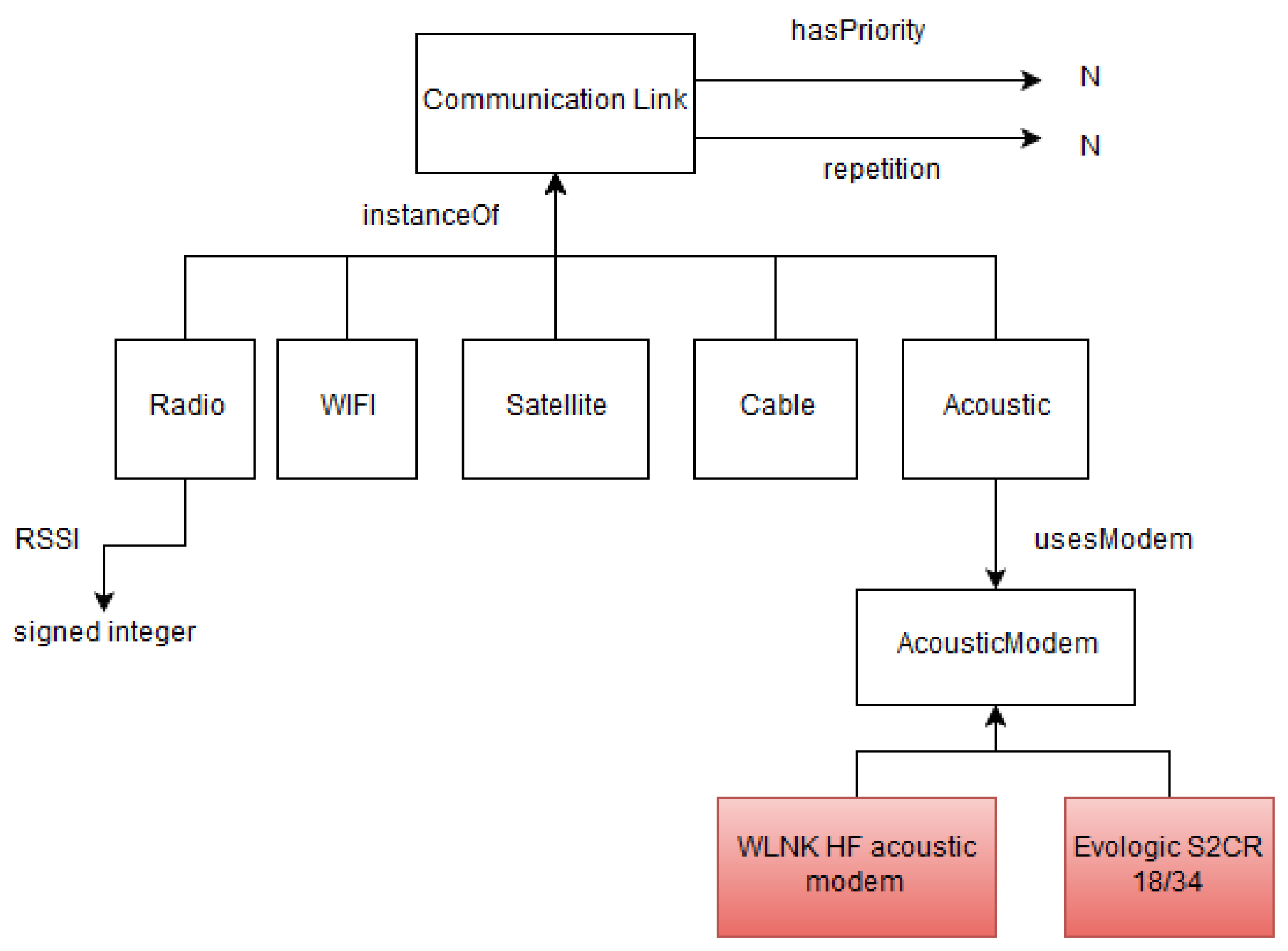
- The SWARMs ontology must provide an abstraction for communication and networking in the SWARMs architecture. It must describe the communication links available in SWARMs architecture to transfer information from the command and control station (CCS) to the vehicles and backward. In addition, it must provide modeling of the protocol and types of messages that can be transmitted within the SWARMs system.
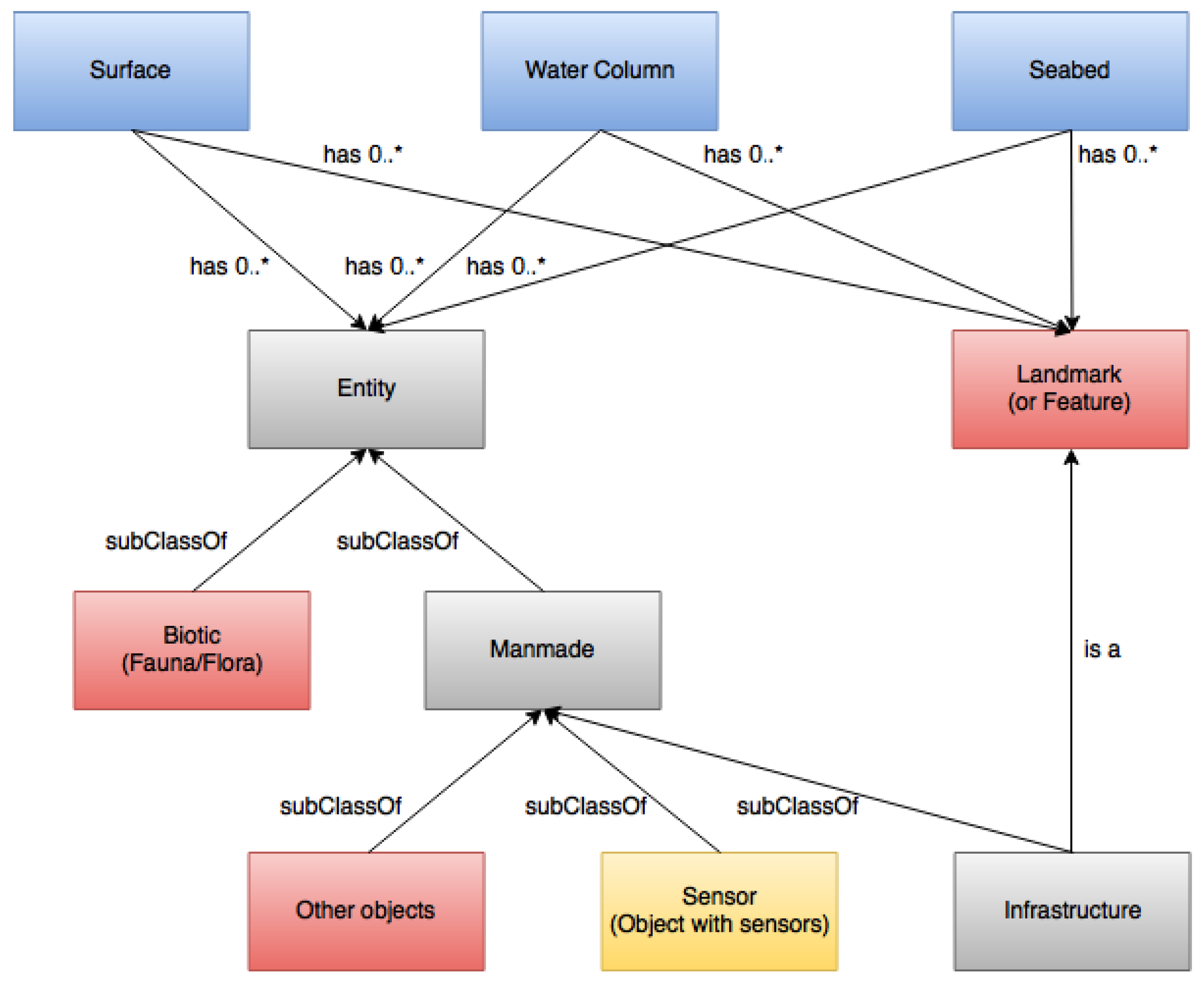
- The SWARMs ontology must support the environment recognition and sensing modeling. Robotic vehicles involved in a mission should have a complete picture of the underwater environment so that they could better adapt to it accordingly. Thus, the SWARMs ontology provides a good representation of the underwater environment. Any information, that is defined targeting to characterize the environment, its recognition, and associated sensing, is properly modeled in the SWARMs ontology. For instance, sensors play a very significant role in sensing the environment and producing useful context data to represent it. The environment is defined through a set of main concepts, which are specified by particular properties that define the surroundings of the location where a mission or task takes place involving robotic vehicles. A variety of environmental properties, such as water salinity, conductivity, temperature, and currents, are formalized in the SWARMs ontology.
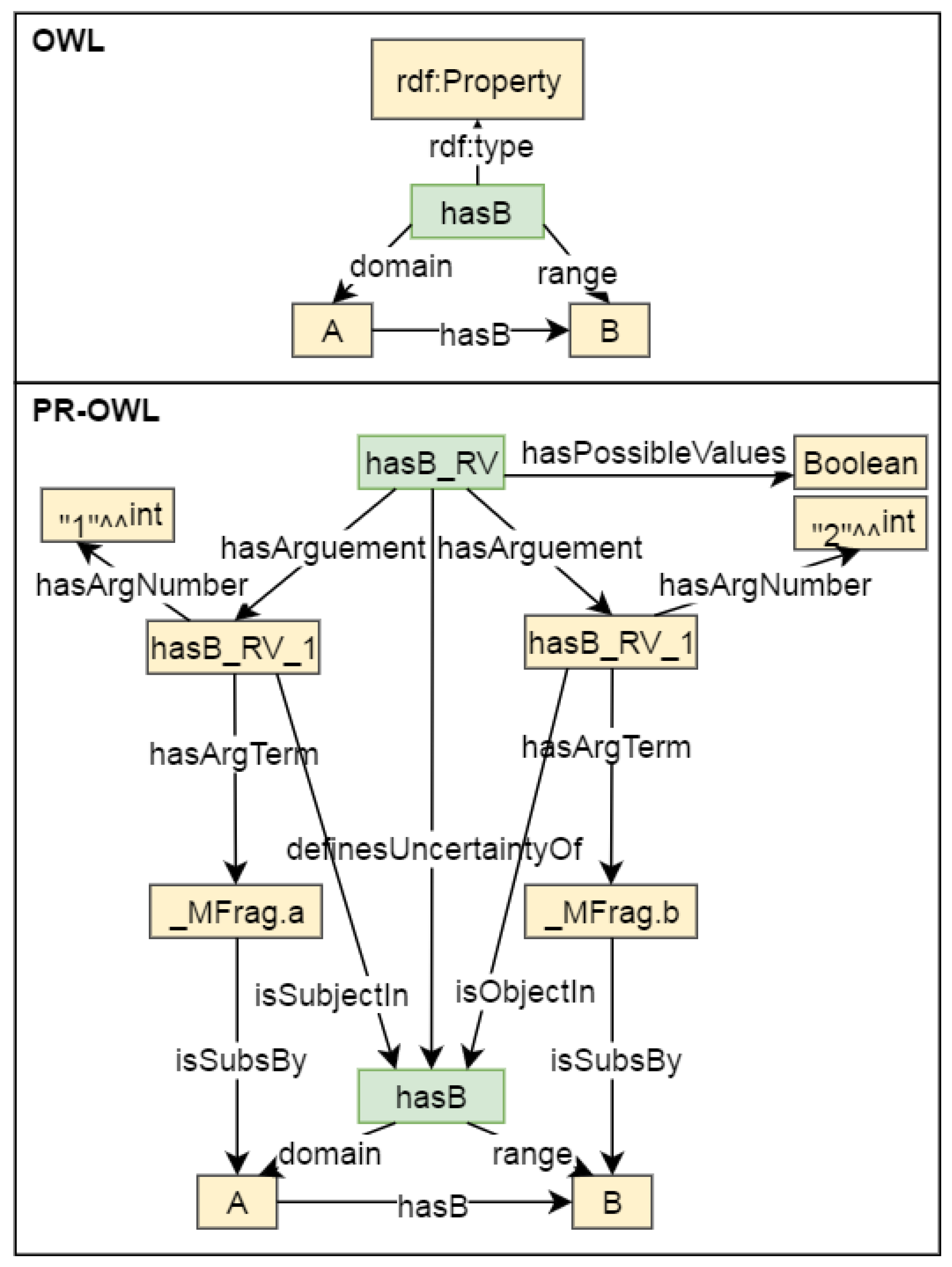
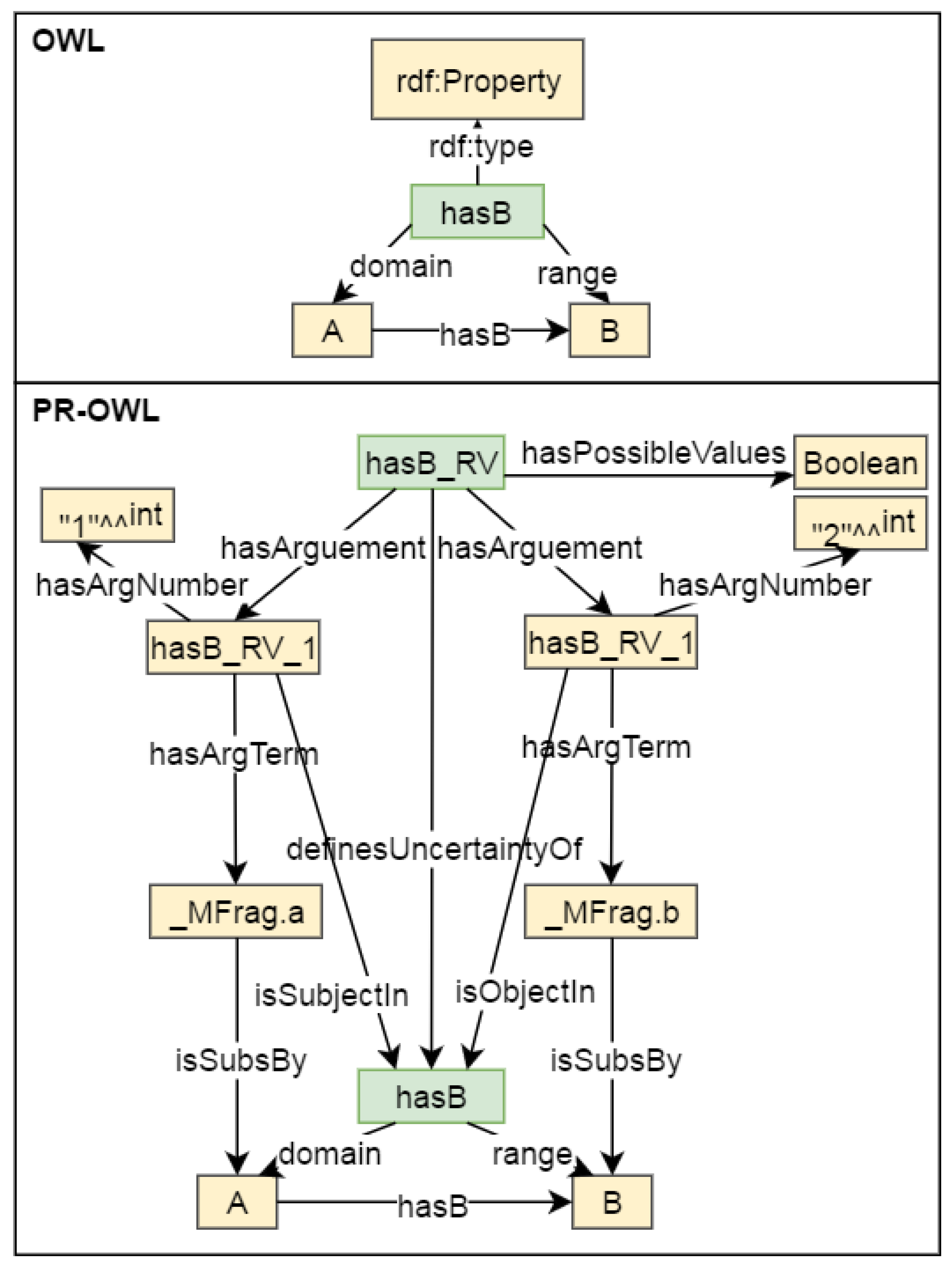
- The SWARMs ontology must model context uncertainties and support for uncertainty reasoning. The harsh maritime and underwater environment typically introduces uncertainties in context data, particularly in such data obtained by sensors or other sensing instruments. The SWARMs ontology can provide a suitable representation for context uncertainties for the sake of completeness and comprehensiveness. In addition, the uncertainty annotations provided by the SWARMs ontology are useful for further reasoning. In other words, the SWARMs ontology can enable the ease of applying uncertainty reasoning in order to generate more useful information.
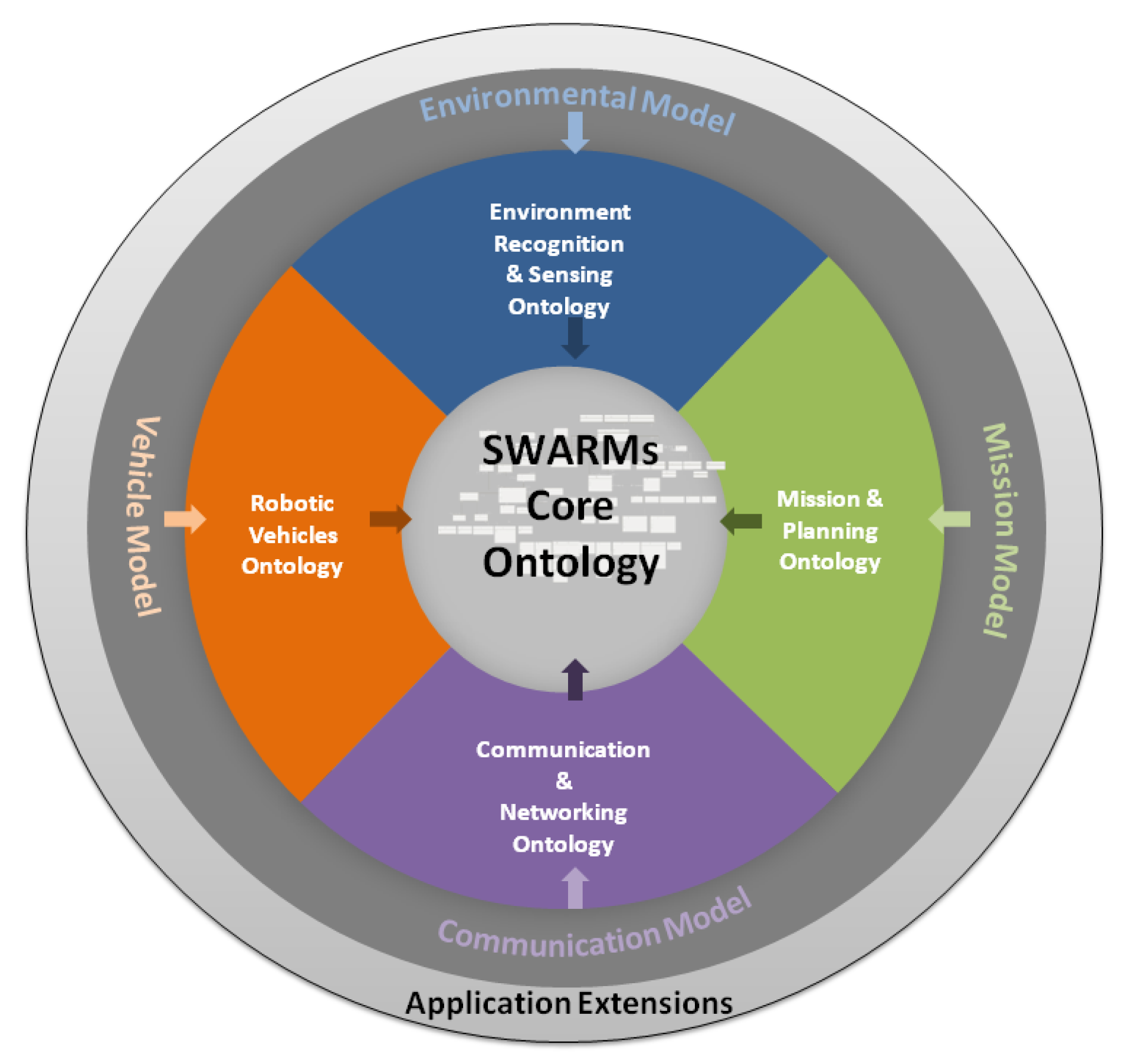
4. The SWARMs Ontology
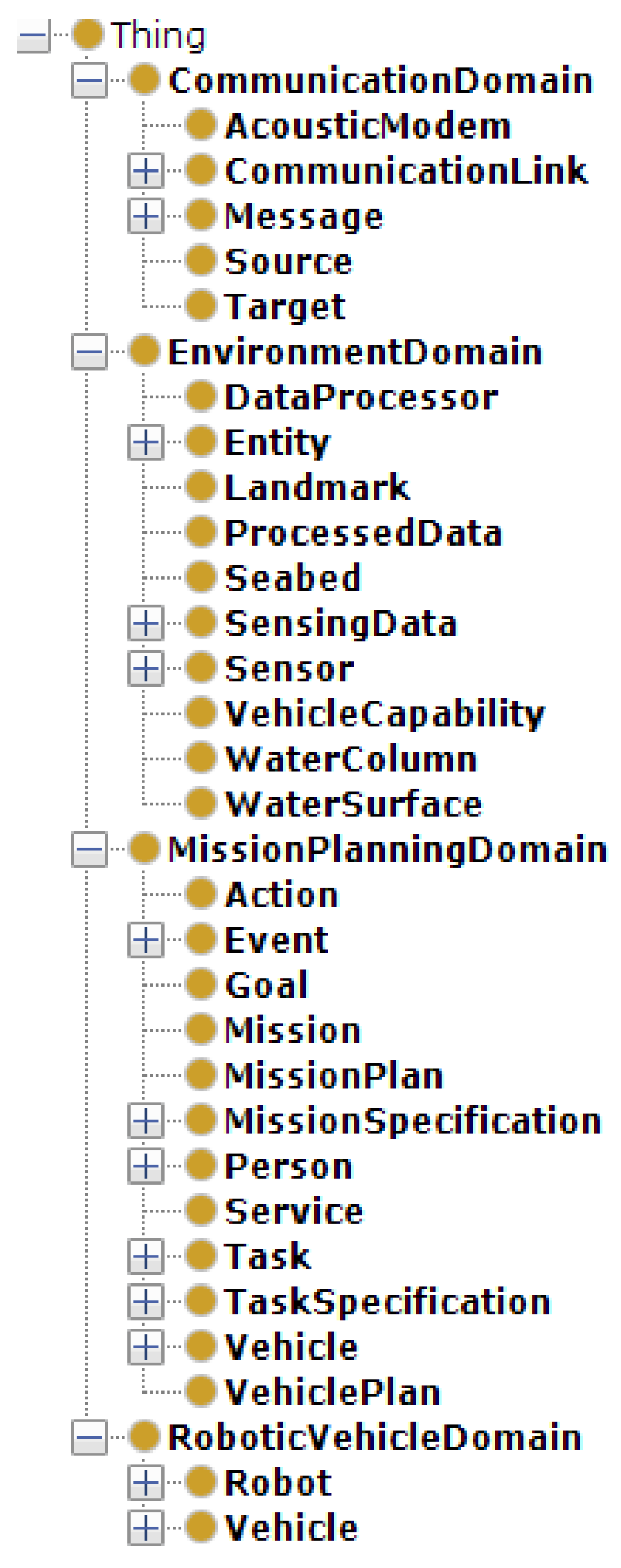
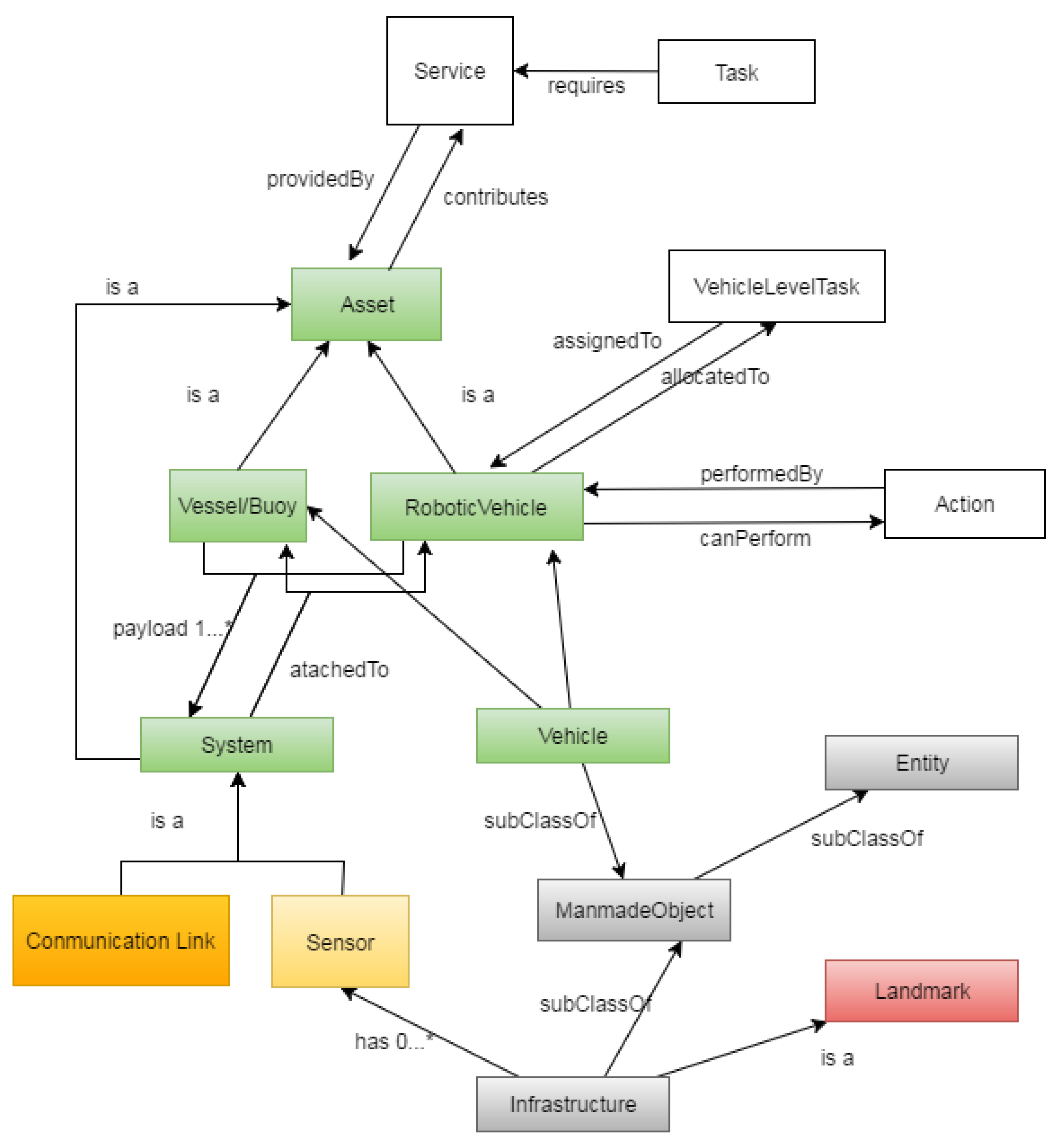
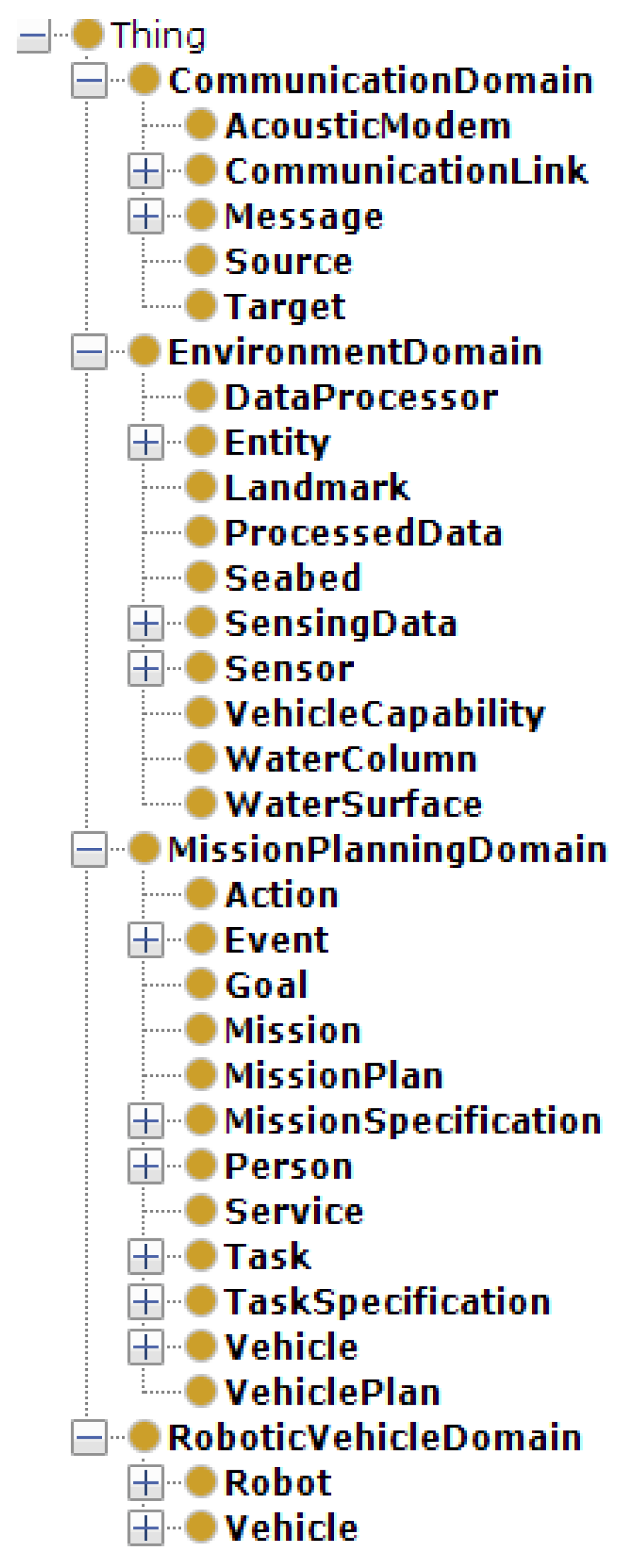
4.1. Core Ontology
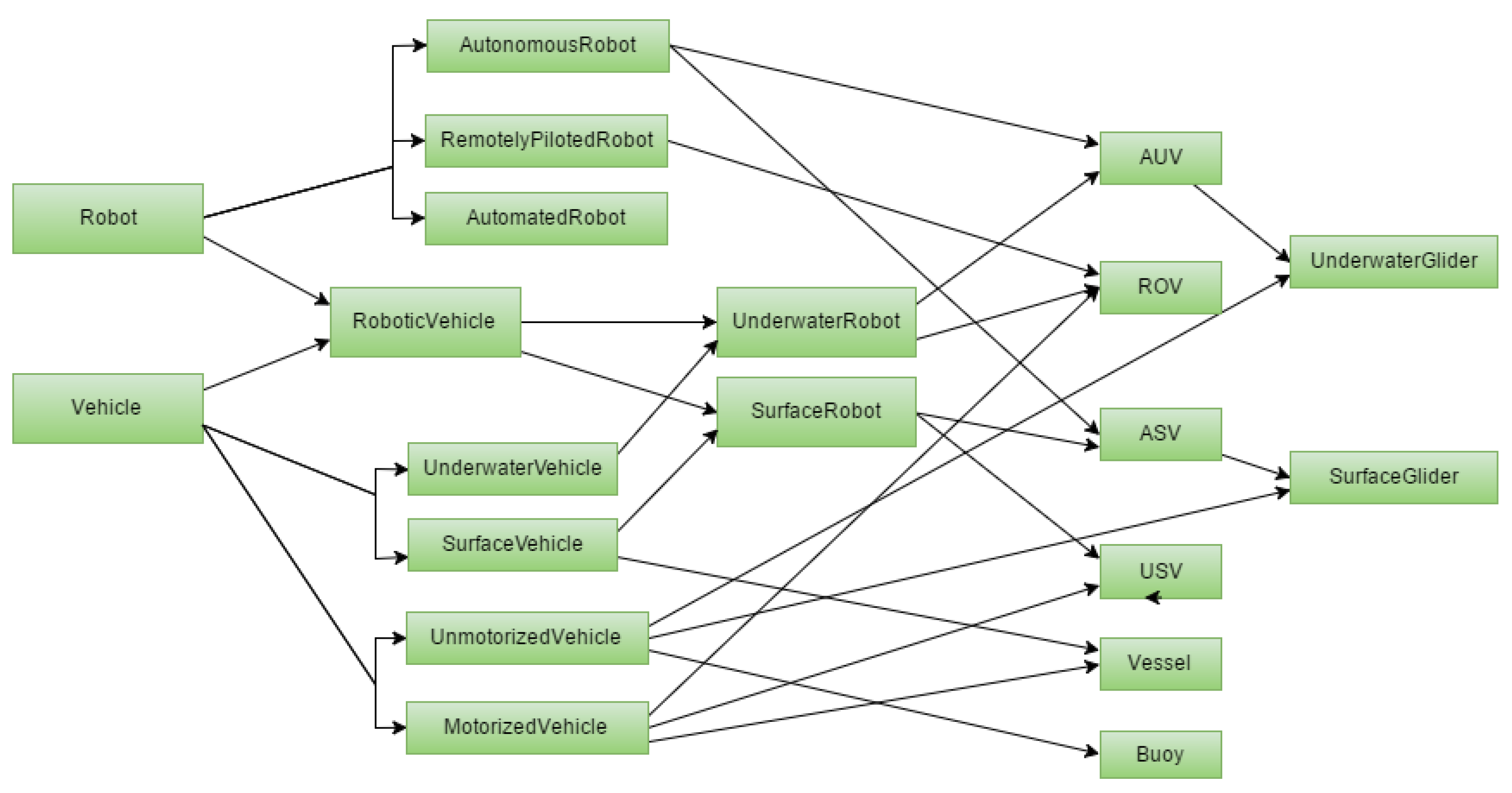
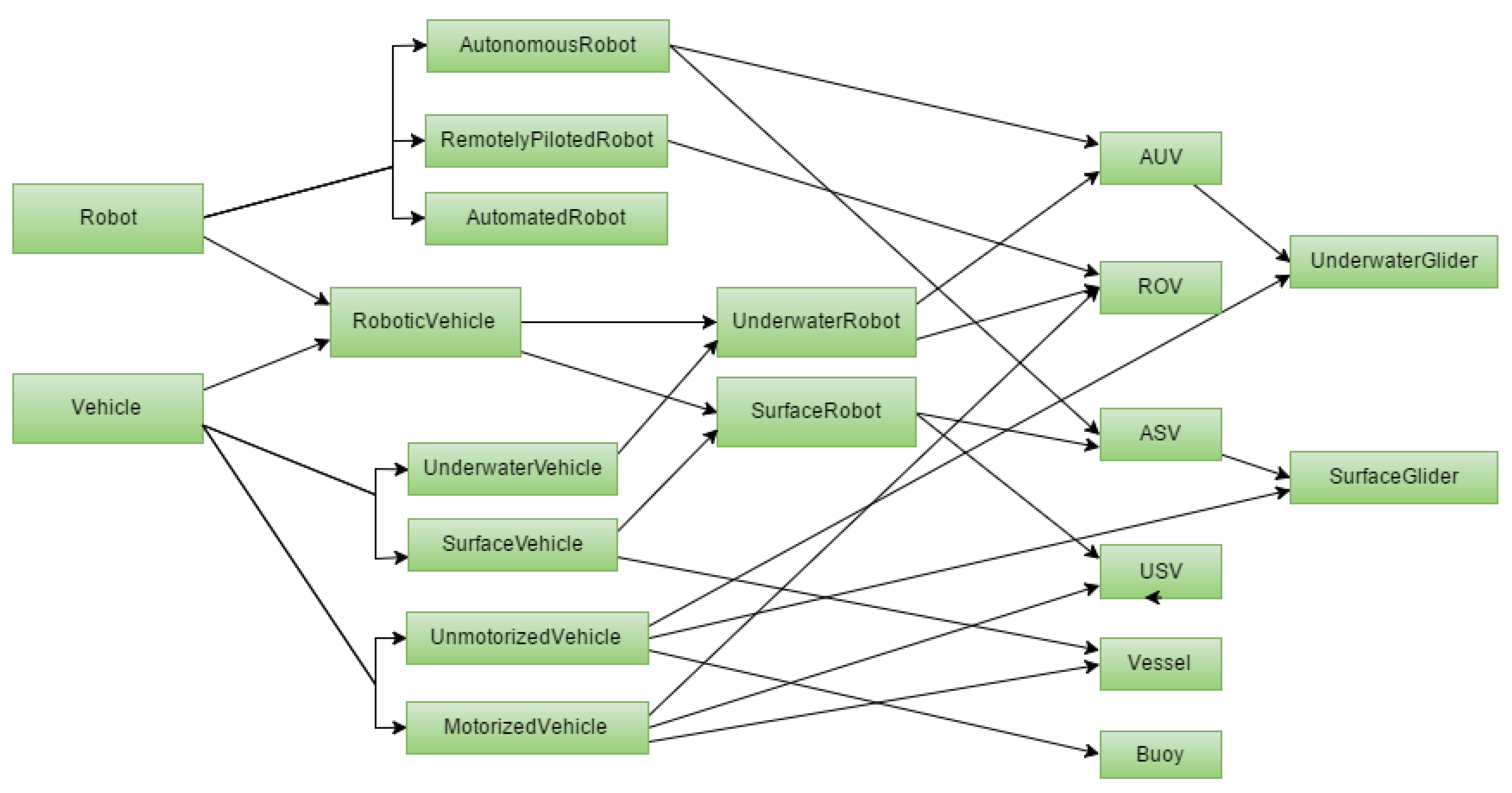
4.2. Robotic Vehicles Ontology
- Mobile robots are vehicles and robots (polymorphism);
- Robots are either autonomous robots, automated robots or remotely piloted robots (disjunction);
- Vehicles are either underwater vehicles or surface vehicles (disjunction); and
- Vehicles are either motorized or propelled by the environment/unmotorized (disjunction).
4.3. Mission and Planning Ontology
4.4. Environment Recognition and Sensing Ontology
4.5. Communication and Networking Ontology
4.6. Application Ontology
5. Implementation and Evaluation Using an Example
5.1. Formalization
5.2. A Use Case on Chemical Pollution Monitoring
5.2.1. Description of the Scenario
5.2.2. Ontology Extensions for the Scenario
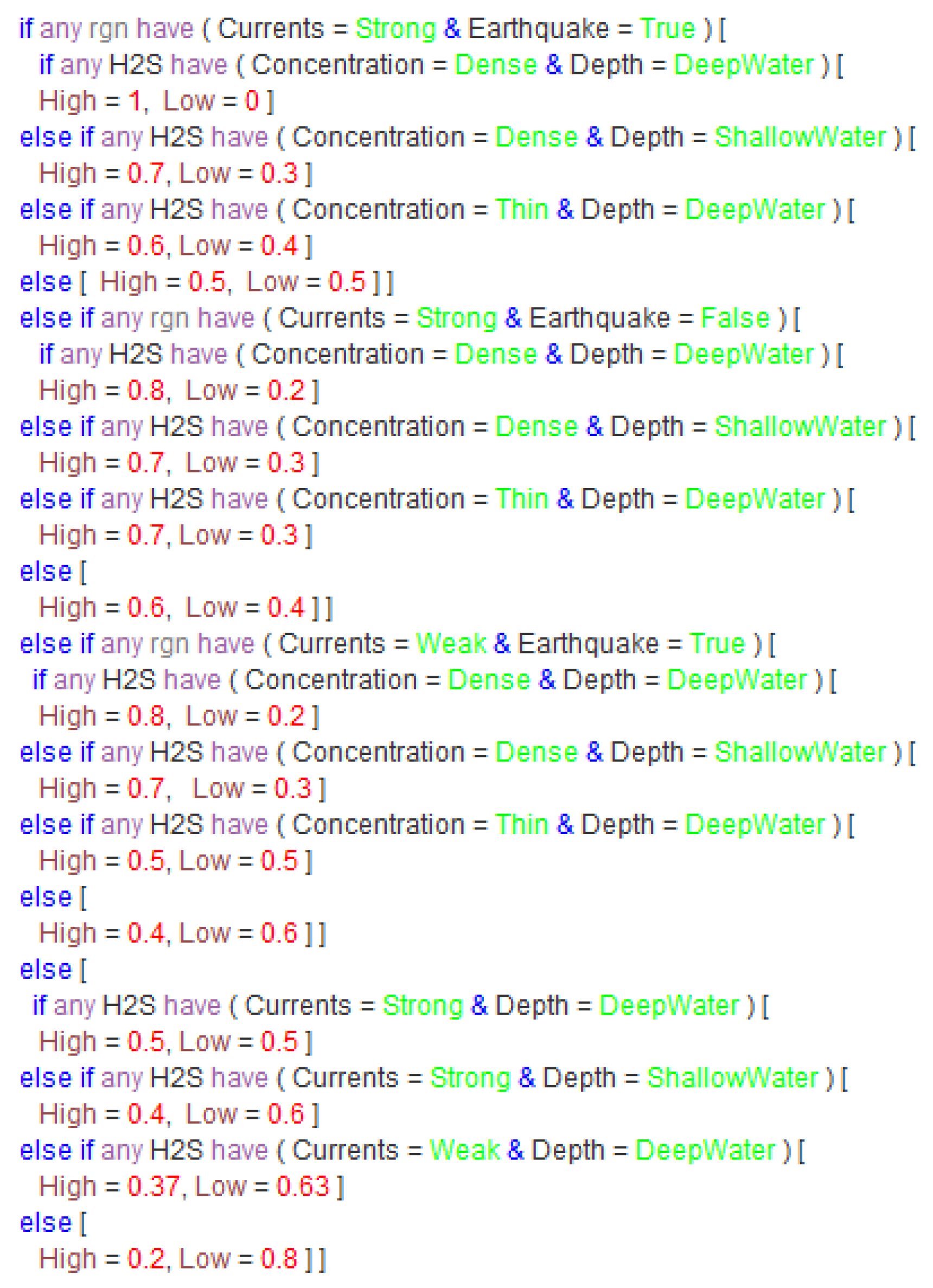
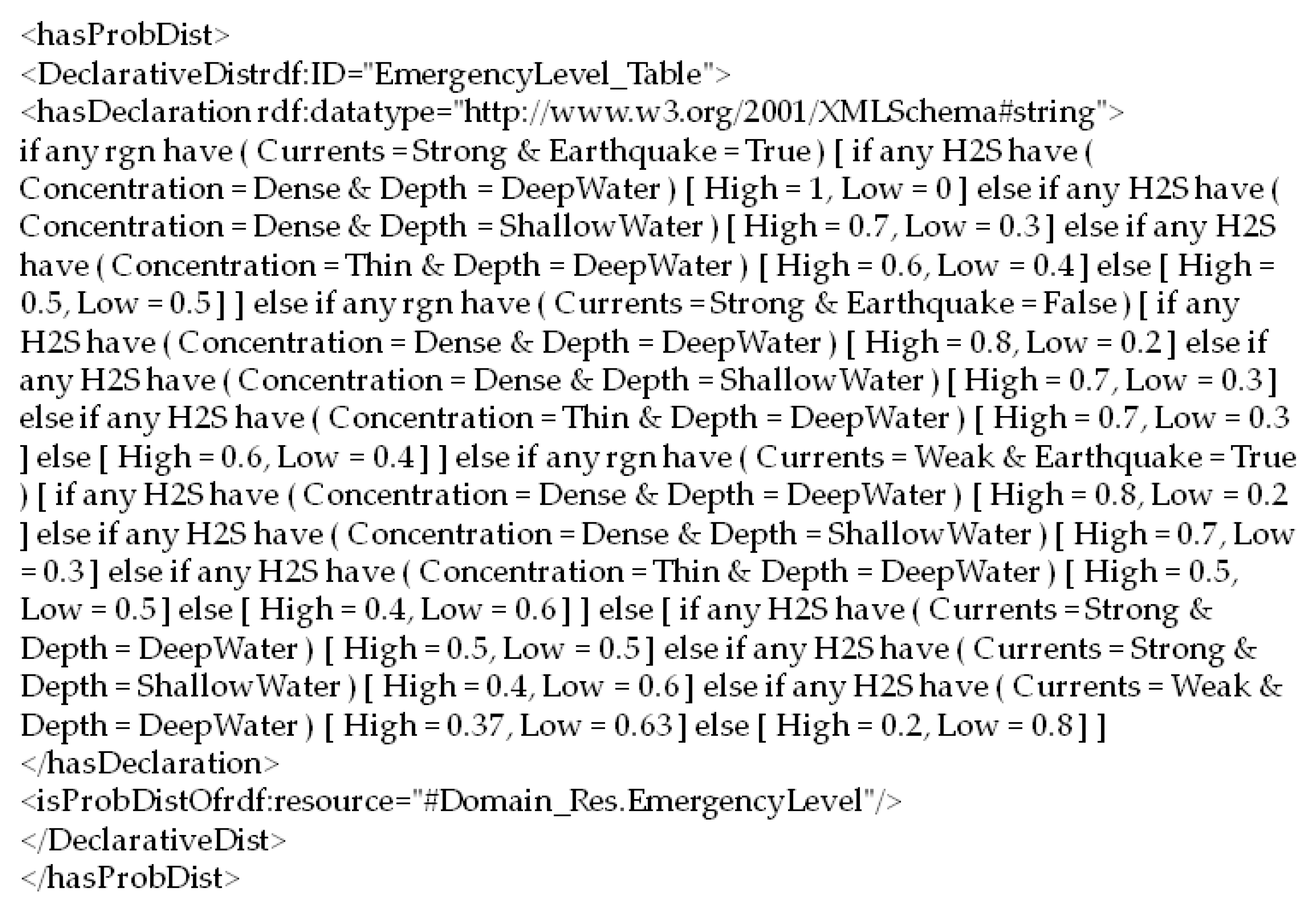
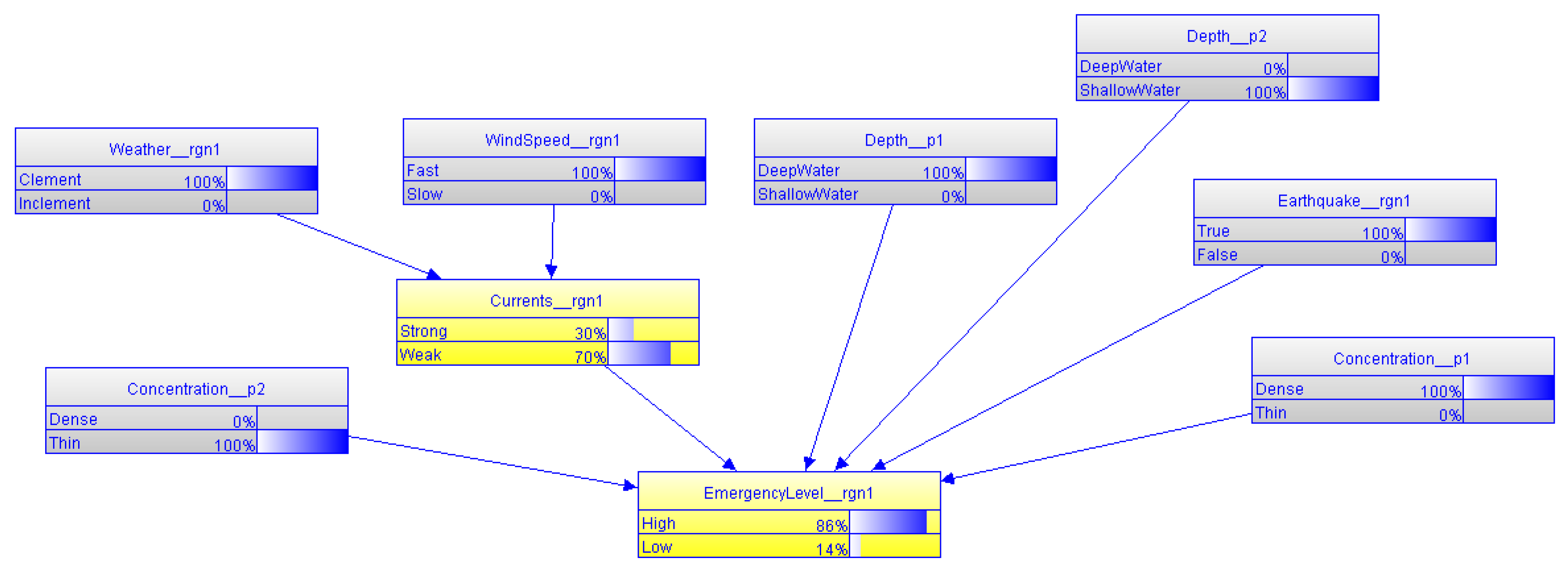
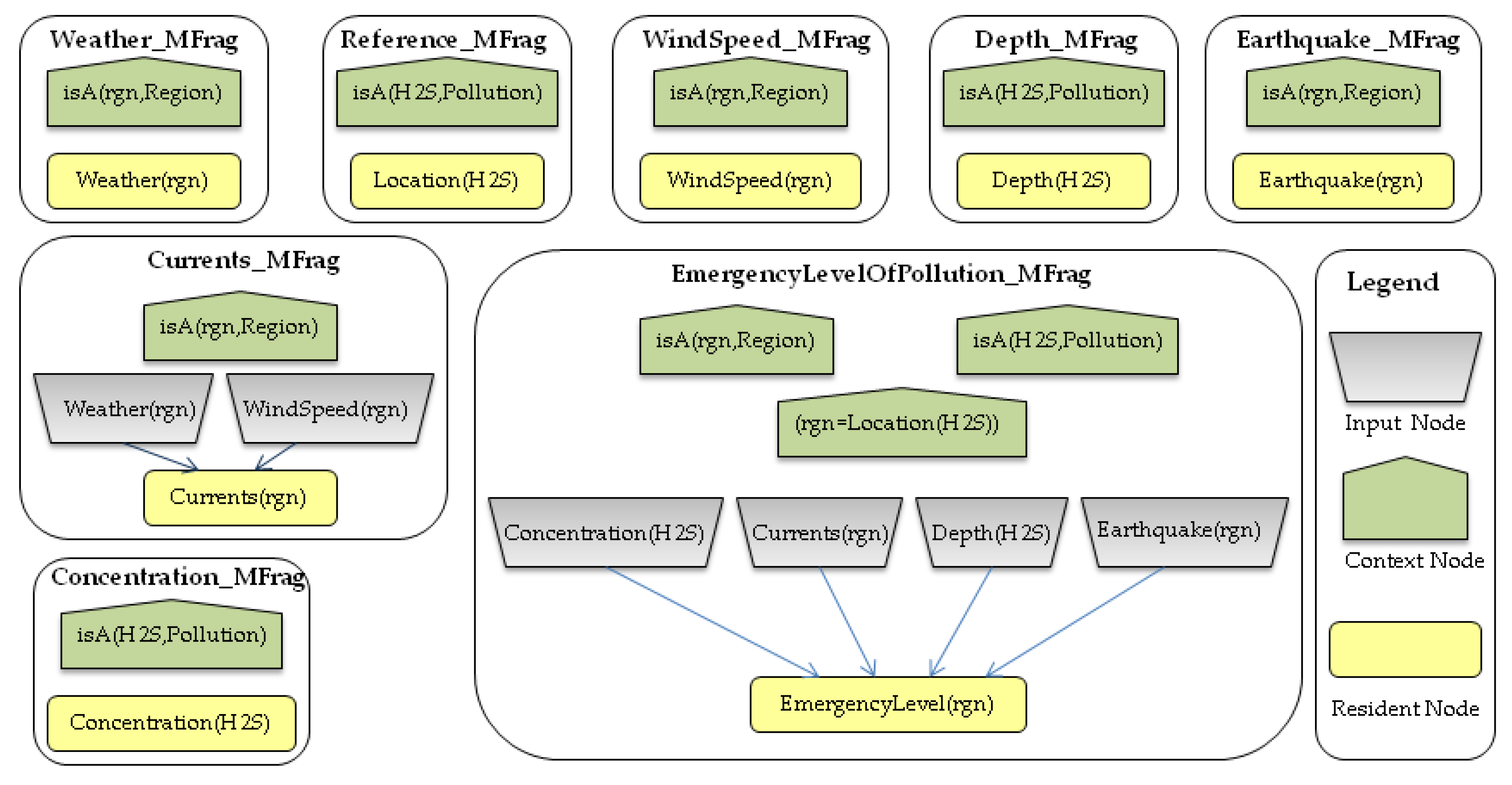
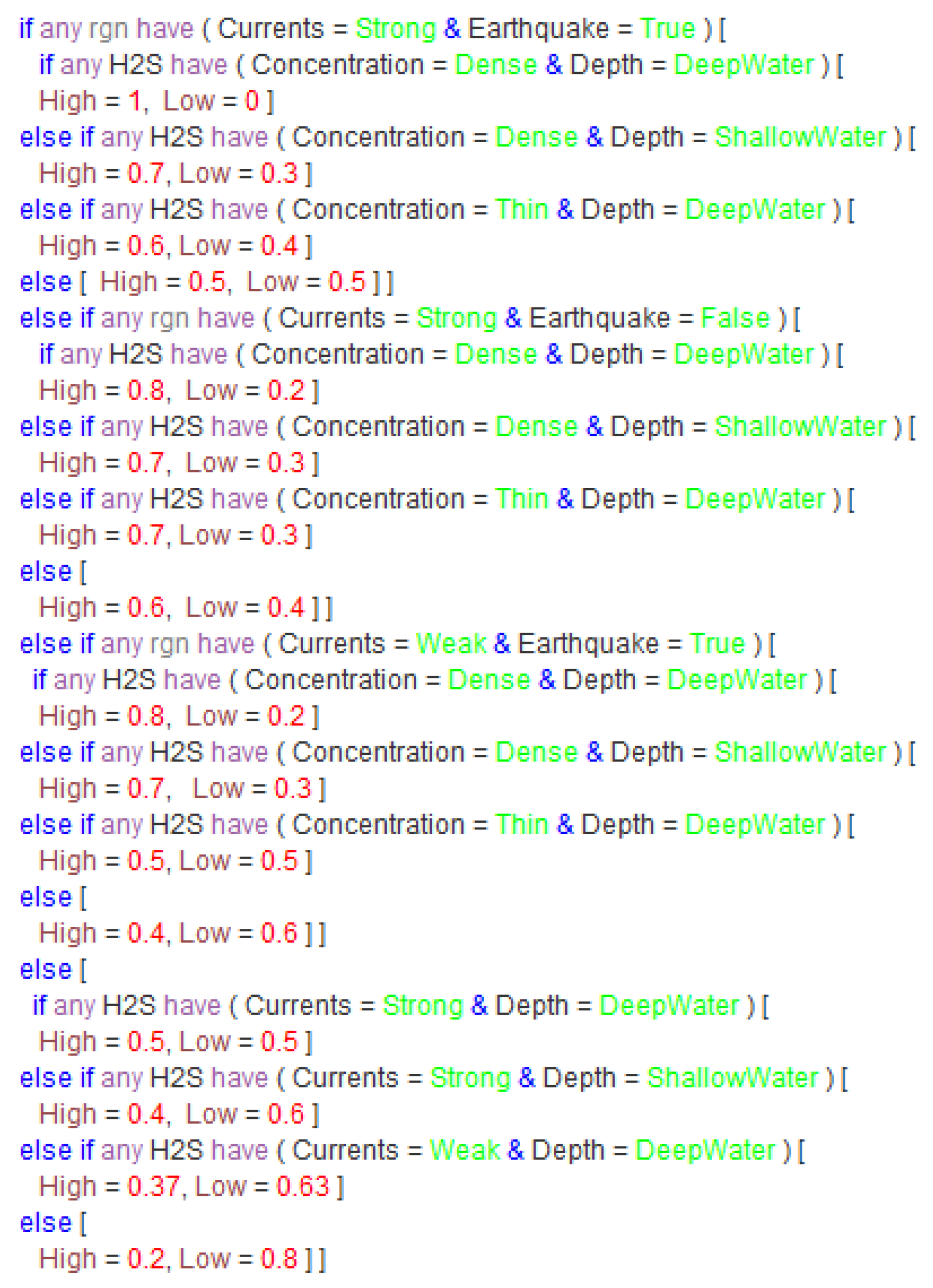
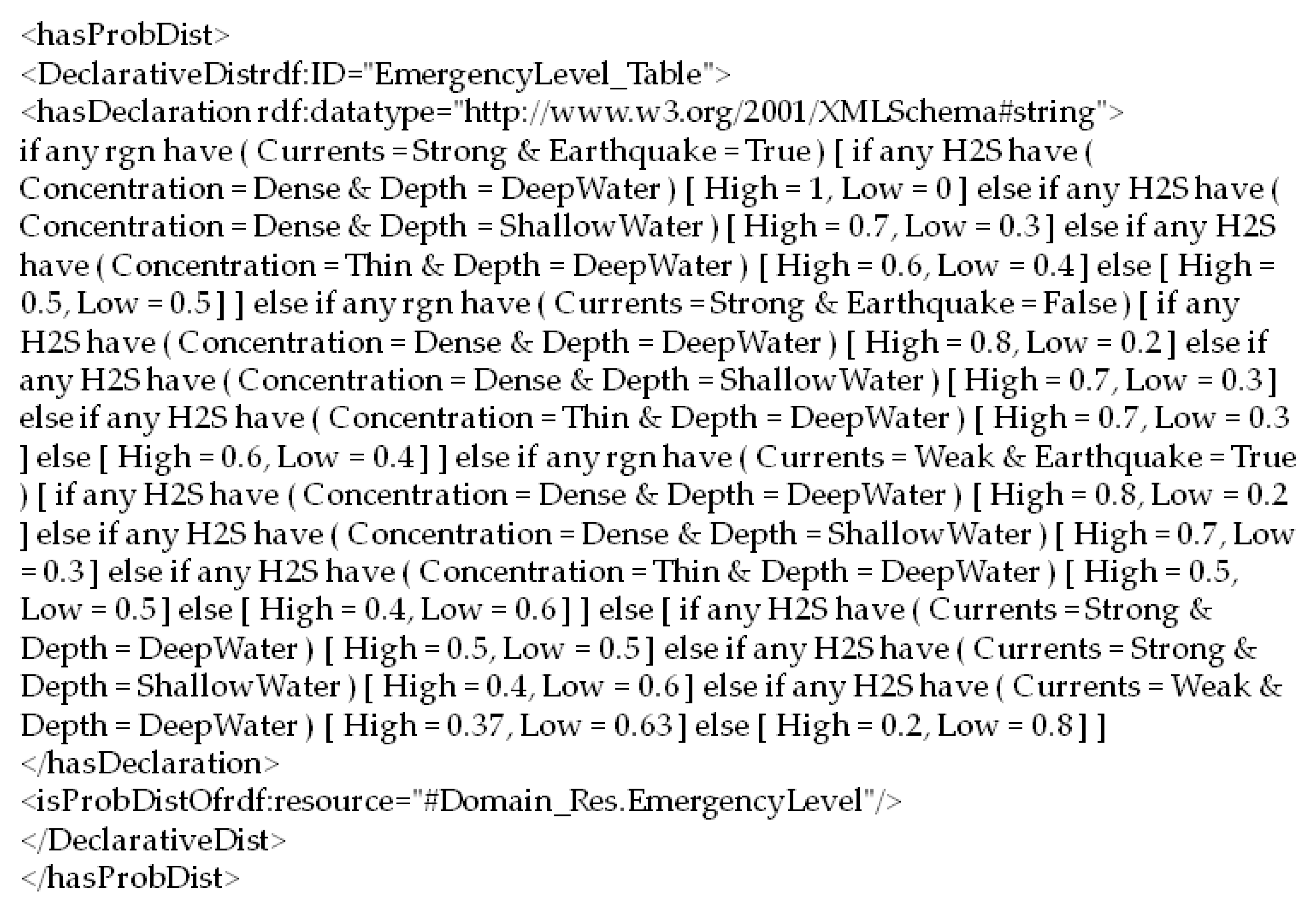
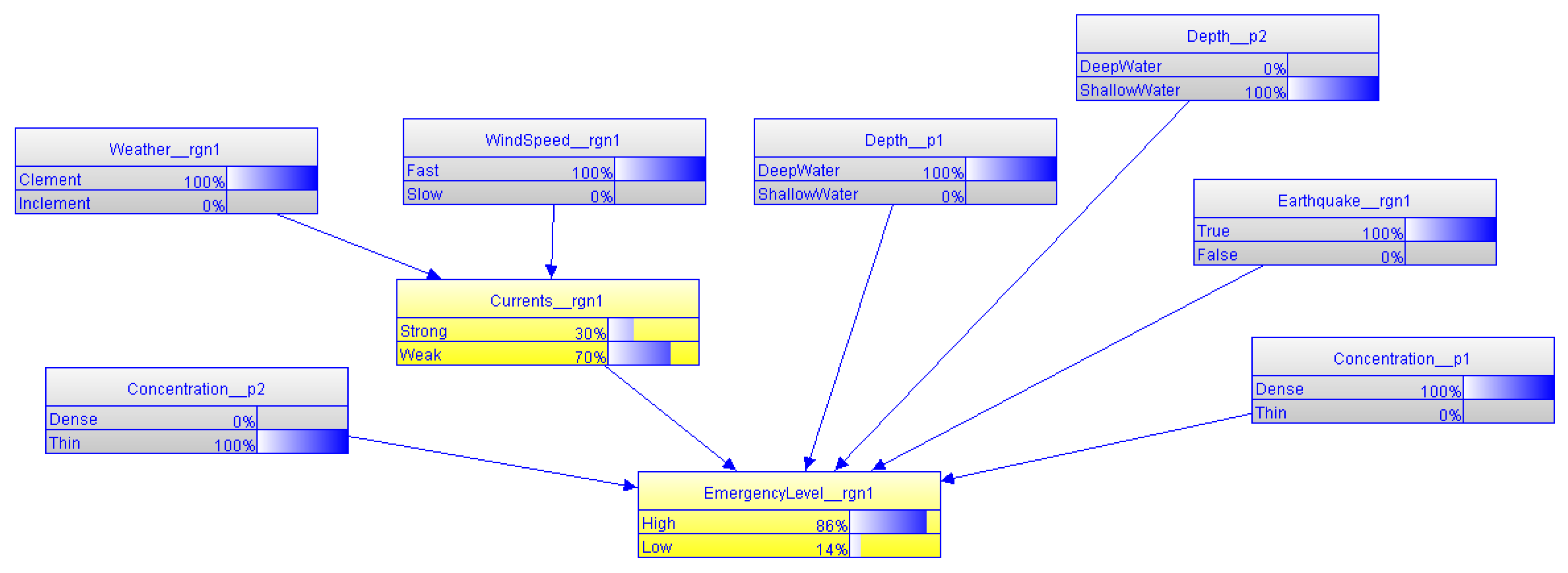
5.2.3. MEBN Reasoning for the Scenario
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zahugi, E.M.H.; Shanta, M.M.; Prasad, T.V. Oil Spill Cleaning up Using Swarm of Robots. In Advances in Computing and Information Technology; Meghanathan, N., Nagamalai, D., Chaki, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 178, pp. 215–224. [Google Scholar]
- Singh, H.; Pizarro, O.; Whitcomb, L.; Yoerger, D. In-Situ attitude calibration for high resolution bathymetric surveys with underwater robotic vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’00), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1767–1774.
- Petillo, S.; Schmidt, H.; Balasuriya, A. Constructing a Distributed AUV Network for Underwater Plume-Tracking Operations. Int. J. Distrib. Sens. Netw. 2012, 2012, 191235. [Google Scholar] [CrossRef]
- Albitar, H.; Dandan, K.; Ananiev, A.; Kalaykov, I. Underwater Robotics: Surface Cleaning Technics, Adhesion and Locomotion Systems. Int. J. Adv. Robot. Syst. 2016, 13, 7. [Google Scholar] [CrossRef]
- Li, X.; Martínez, J.-F.; Rodríguez-Molina, J.; Martínez, N. A Survey on Intermediation Architectures for Underwater Robotics. Sensors 2016, 16, 190. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rivero, C.R.; Hernandez, I.; Ruiz, D.; Corchuelo, R. Benchmarking Data Exchange among Semantic-Web Ontologies. IEEE Trans. Knowl. Data Eng. 2013, 25, 1997–2009. [Google Scholar] [CrossRef]
- Chen, L.; Nugent, C.; Okeyo, G. An Ontology-Based Hybrid Approach to Activity Modeling for Smart Homes. IEEE Trans. Hum. Mach. Syst. 2014, 44, 92–105. [Google Scholar] [CrossRef]
- Lasierra, N.; Roldán, F.; Alesanco, A.; García, J. Towards improving usage and management of supplies in healthcare: An ontology-based solution for sharing knowledge. Expert Syst. Appl. 2014, 41, 6261–6273. [Google Scholar] [CrossRef]
- Li, X.; Martinez, J.-F.; Rubio, G.; Gomez, D. Context reasoning for underwater robots using MEBN. In Proceedings of the ICCR 2016 International Conference on Cloud and Robotics, Saint-Quentin, France, 22–23 November 2016.
- Carvalho, R.N. Probabilistic Ontology: Representation and Modeling Methodology. Ph.D. Thesis, George Mason University, Fairfax, VA, USA, 2011. [Google Scholar]
- Hertzberg, J.; Saffiotti, A. Using semantic knowledge in robotics. Robot. Auton. Syst. 2008, 56, 875–877. [Google Scholar] [CrossRef]
- Paull, L.; Severac, G.; Raffo, G.V.; Angel, J.M.; Boley, H.; Durst, P.J.; Gray, W.; Habib, M.; Nguyen, B.; Ragavan, S.V.; et al. Towards an Ontology for Autonomous Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 1359–1364.
- Insaurralde, C.C.; Cartwright, J.J.; Petillot, Y.R. Cognitive Control Architecture for autonomous marine vehicles. In Proceedings of the IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 19–22 March 2012; pp. 1–8.
- Tenorth, M.; Beetz, M. Representations for robot knowledge in the KnowRob framework. Artif. Intell. 2015. [Google Scholar] [CrossRef]
- Lemaignan, S.; Ros, R.; Mösenlechner, L.; Alami, R.; Beetz, M. ORO, a knowledge management platform for cognitive architectures in robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 3548–3553.
- Dhouib, S.; Kchir, S.; Stinckwich, S.; Ziadi, T.; Ziane, M. RobotML, a Domain-Specific Language to Design, Simulate and Deploy Robotic Applications. In Simulation, Modeling, and Programming for Autonomous Robots; Noda, I., Ando, N., Brugali, D., Kuffner, J.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7628, pp. 149–160. [Google Scholar]
- Martinet, P.; Patin, B. PROTEUS: A platform to organise transfer inside French robotic community. In Proceedings of the 3rd National Conference on Control Architectures of Robots, Bourges, France, 29–30 May 2008.
- Gorodetsky, V.I.; Samoylov, V.V.; Trotskii, D.V. The reference ontology of collective behavior of autonomous agents and its extensions. J. Comput. Syst. Sci. Int. 2015, 54, 765–782. [Google Scholar] [CrossRef]
- Bouguerra, A.; Karlsson, L.; Saffiotti, A. Monitoring the execution of robot plans using semantic knowledge. Robot. Auton. Syst. 2008, 56, 942–954. [Google Scholar] [CrossRef]
- Galindo, C.; Fernández-Madrigal, J.-A.; González, J.; Saffiotti, A. Robot task planning using semantic maps. Robot. Auton. Syst. 2008, 56, 955–966. [Google Scholar] [CrossRef]
- Schlenoff, C.; Balakirsky, S.; Uschold, M.; Provine, R.; Smith, S. Using ontologies to aid navigation planning in autonomous vehicles. Knowl. Eng. Rev. 2003, 18, 243–255. [Google Scholar] [CrossRef]
- Schlenoff, C.; Messina, E. A Robot Ontology for Urban Search and Rescue; ACM Press: New York, NY, USA, 2005; pp. 27–34. [Google Scholar]
- Witt, K.J.; Stanley, J.; Smithbauer, D. Enabling Sensor Webs by Utilizing SWAMO for Autonomous Operations. In Proceedings of the KAR’05 2005 ACM workshop on Research in knowledge representation for autonomous systems, Bremen, Germany, 31 October–5 November 2005; pp. 27–34.
- Miguelanez, E.; Patron, P.; Brown, K.E.; Petillot, Y.R.; Lane, D.M. Semantic Knowledge-Based Framework to Improve the Situation Awareness of Autonomous Underwater Vehicles. IEEE Trans. Knowl. Data Eng. 2011, 23, 759–773. [Google Scholar] [CrossRef]
- The W3C UR3W-XG Group. W3C Uncertainty Reasoning for the World Wide Web XG Uncertainty Ontology; W3C: Cambridge, MA, USA, 2008. [Google Scholar]
- Bobillo, F.; Straccia, U. Fuzzy ontology representation using OWL 2. Int. J. Approx. Reason. 2011, 52, 1073–1094. [Google Scholar] [CrossRef]
- Yi, Y.; Calmet, J. OntoBayes: An Ontology-Driven Uncertainty Model. In Proceedings of the IEEE International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce, Vienna, Austria, 28–30 November 2005; Volume 1, pp. 457–463.
- Laskey, K.B. MEBN: A language for first-order Bayesian knowledge bases. Artif. Intell. 2008, 172, 140–178. [Google Scholar] [CrossRef]
- Da Costa, P.C.G.; Laskey, K.B.; Laskey, K.J. PR-OWL: A Bayesian Ontology Language for the Semantic Web. In Uncertainty Reasoning for the Semantic Web I; da Costa, P.C.G., d’Amato, C., Fanizzi, N., Laskey, K.B., Laskey, K.J., Lukasiewicz, T., Nickles, M., Pool, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5327, pp. 88–107. [Google Scholar]
- Carvalho, R.N.; Matsumoto, S.; Laskey, K.B.; Costa, P.C.G.; Ladeira, M.; Santos, L.L. Probabilistic Ontology and Knowledge Fusion for Procurement Fraud Detection in Brazil. In Uncertainty Reasoning for the Semantic Web II; Bobillo, F., Costa, P.C.G., d’Amato, C., Fanizzi, N., Laskey, K.B., Laskey, K.J., Lukasiewicz, T., Nickles, M., Pool, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7123, pp. 19–40. [Google Scholar]
- Carvalho, R.N.; Haberlin, R.; Costa, P.C.G.; Laskey, K.B.; Chang, K. Modeling a probabilistic ontology for maritime domain awareness. In 2011 Proceedings of the 14th International Conference on Information Fusion (FUSION), Chicago, IL, USA, 5–8 July 2011.
- Chantas, G.; Kitsikidis, A.; Nikolopoulos, S.; Dimitropoulos, K.; Douka, S.; Kompatsiaris, I.; Grammalidis, N. Multi-Entity Bayesian Networks for Knowledge-Driven Analysis of ICH Content. In Computer Vision—ECCV 2014 Workshops; Agapito, L., Bronstein, M.M., Rother, C., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 8926, pp. 355–369. [Google Scholar]
- Suárez-Figueroa, M.C.; Gómez-Pérez, A.; Fernández-López, M. The NeOn Methodology for Ontology Engineering. In Ontology Engineering in a Networked World; Suárez-Figueroa, M.C., Gómez-Pérez, A., Motta, E., Gangemi, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 9–34. [Google Scholar]
- Li, X.; Martinez, J.-F.; Rubio, G. A New Fuzzy Ontology Development Methodology (FODM) Proposal. IEEE Access 2016, 4, 7111–7124. [Google Scholar] [CrossRef]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Bilbao, S.; Martín-Wanton, T.; Bastos, J.; Rodriguez, J. SWARMs Ontology: A Common Information Model for the Cooperation of Underwater Robots. Sensors 2017, 17, 569. https://doi.org/10.3390/s17030569
Li X, Bilbao S, Martín-Wanton T, Bastos J, Rodriguez J. SWARMs Ontology: A Common Information Model for the Cooperation of Underwater Robots. Sensors. 2017; 17(3):569. https://doi.org/10.3390/s17030569
Chicago/Turabian StyleLi, Xin, Sonia Bilbao, Tamara Martín-Wanton, Joaquim Bastos, and Jonathan Rodriguez. 2017. "SWARMs Ontology: A Common Information Model for the Cooperation of Underwater Robots" Sensors 17, no. 3: 569. https://doi.org/10.3390/s17030569