
Online Detection of Driver Fatigue Using Steering Wheel Angles for Real Driving Conditions


Abstract
:1. Introduction
2. Methodology
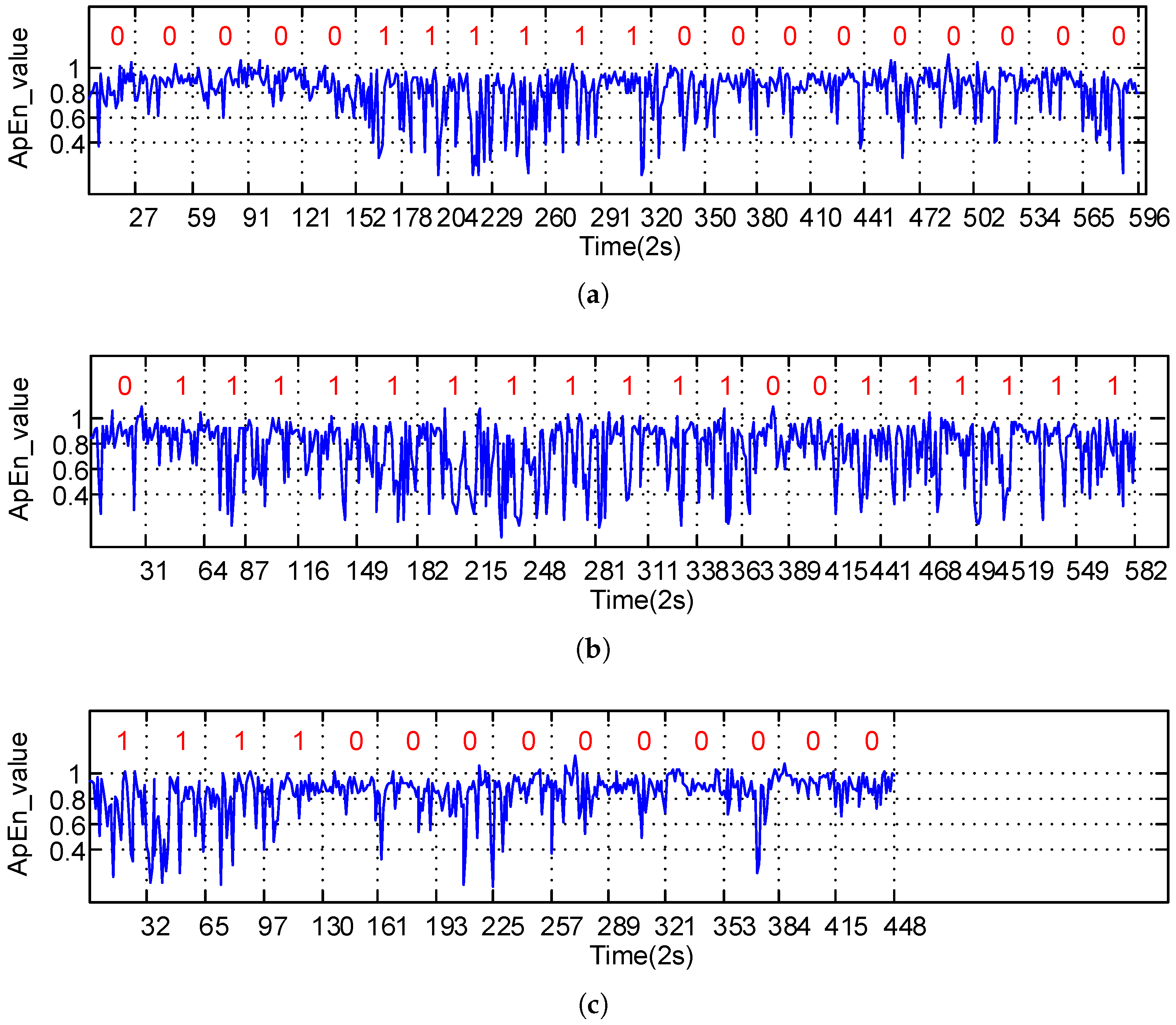
2.1. Extracting Approximate Entropy from Steering Wheel Angle
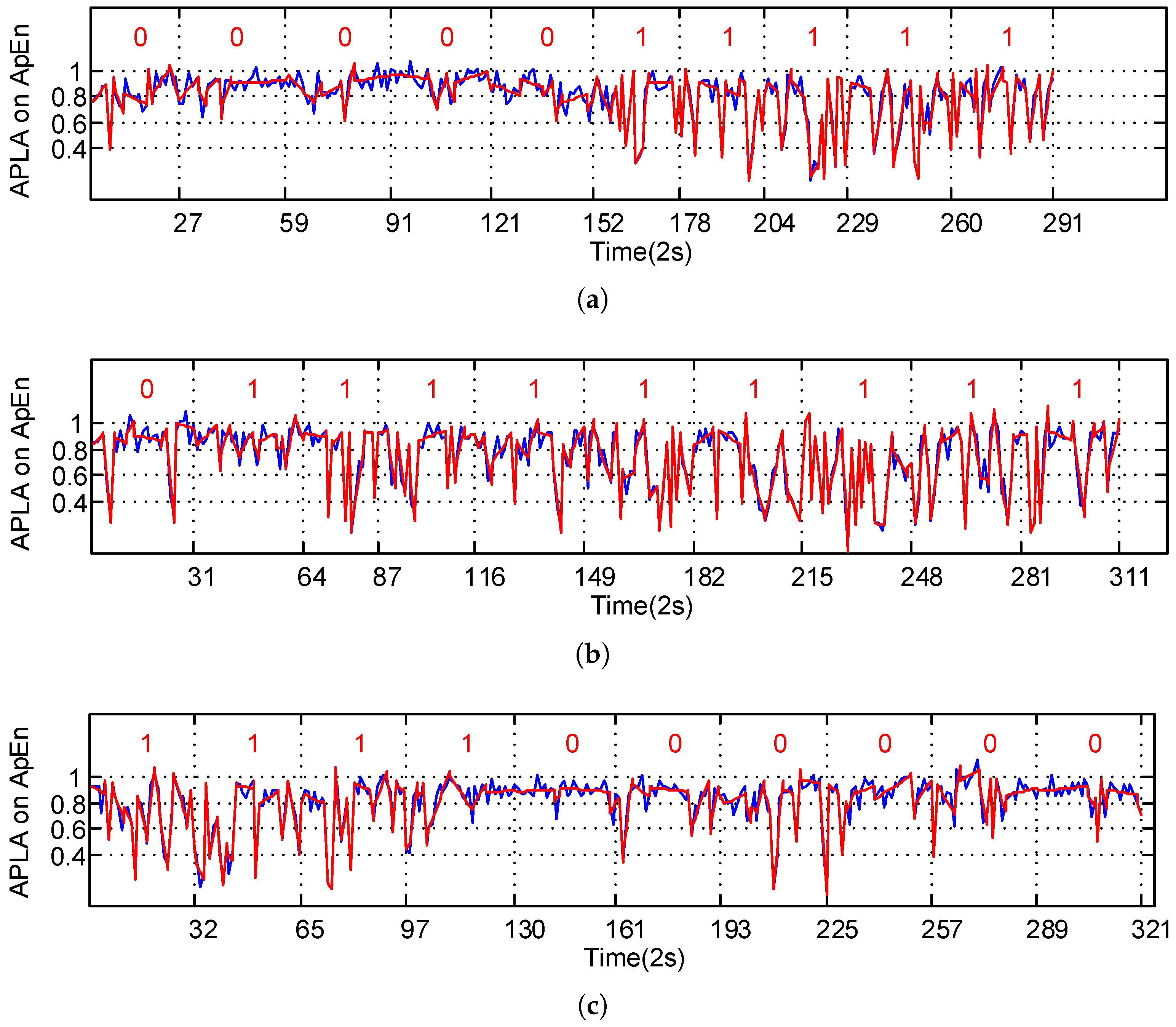
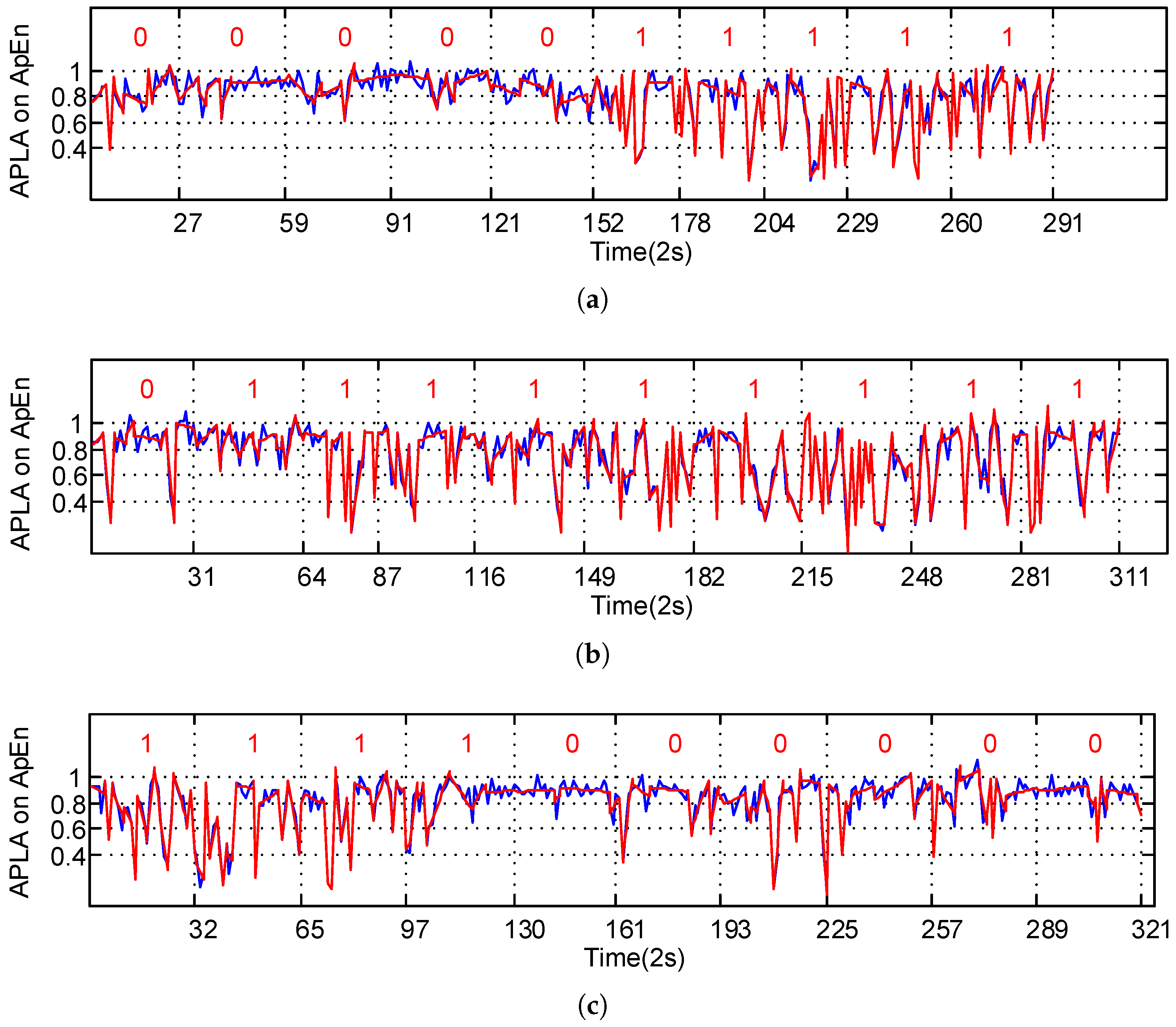
2.2. Representing ApEn Series with Adaptive Piecewise Linear Approximation
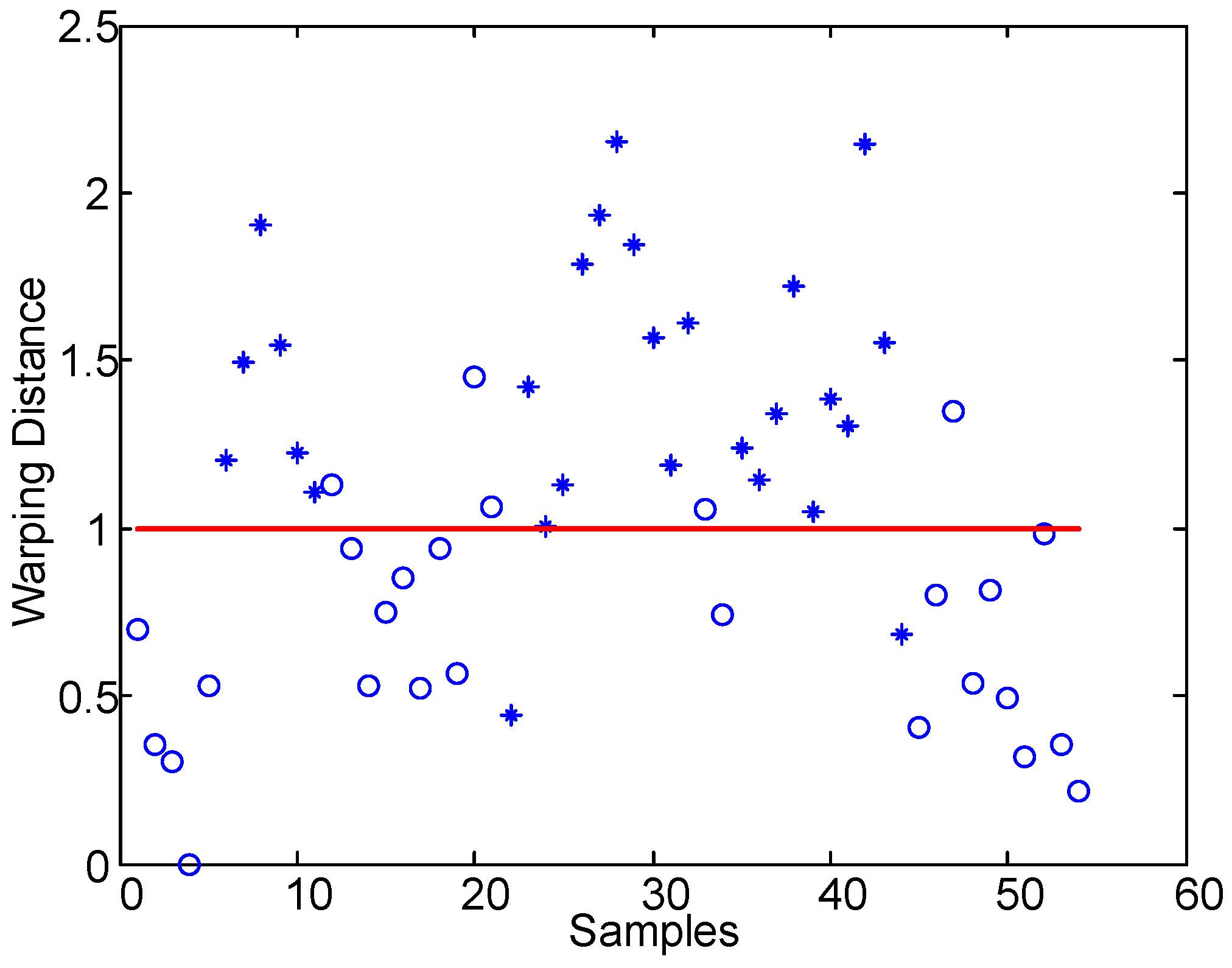
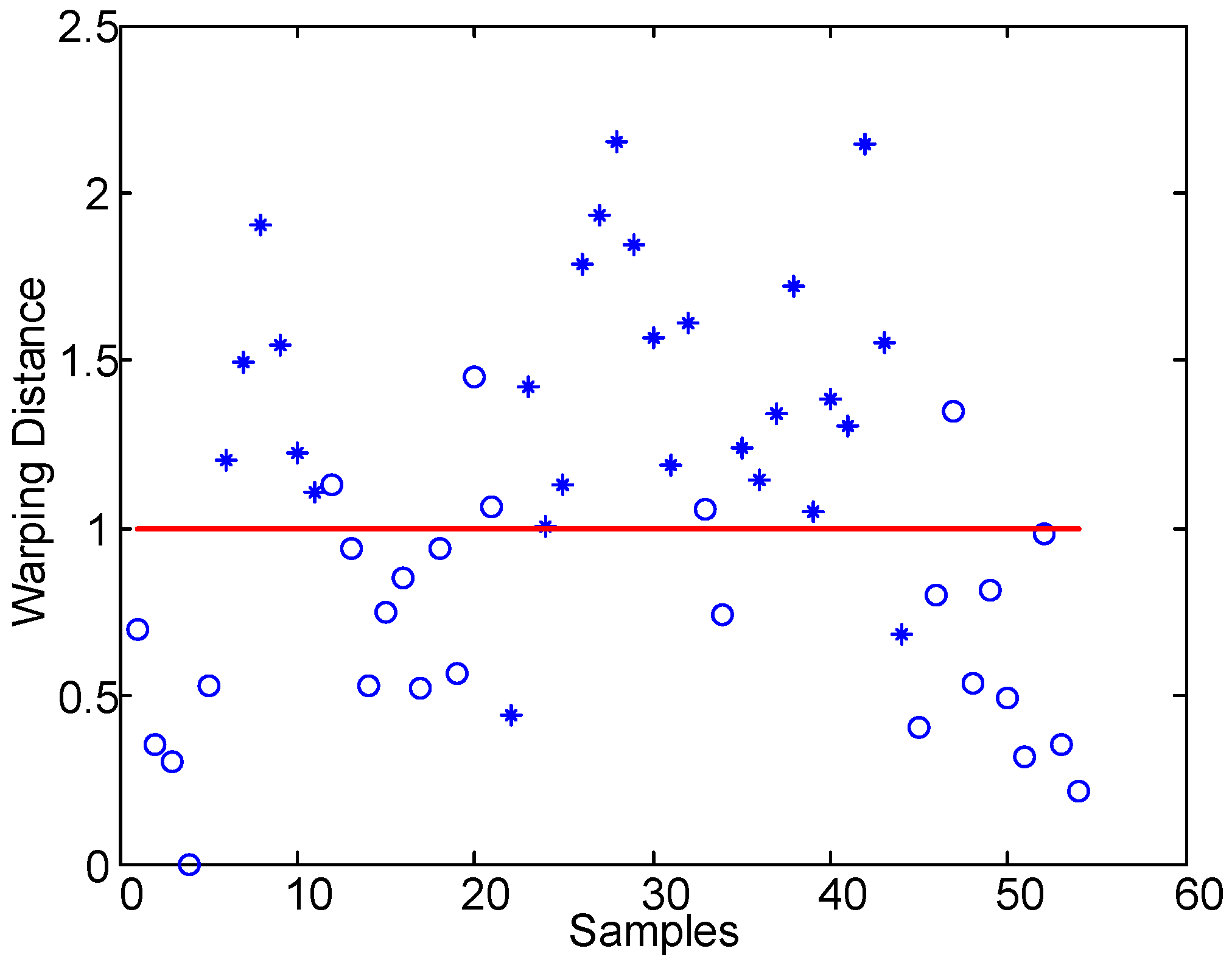
2.3. Calculating Warping Distance of Dynamic Time Series
2.4. Detecting Fatigue Patterns Online
3. Experiment and Results
3.1. Experiment Setup
3.2. Fatigue Level Criteria
Segmentation Synchronous Facial Videos and Operating Feature Data
3.3. Experiment Results
4. Discussion
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Connor, J.L. The role of driver sleepiness in car crashes: A review of the epidemiological evidence. In Drugs, Driving and Traffic Safety; Springer: Basel, Switzerland, 2009; pp. 187–205. [Google Scholar]
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Trans. Biomed. Eng. 2011, 58, 121–131. [Google Scholar] [CrossRef] [PubMed]
- Picot, A.; Charbonnier, S.; Caplier, A. On-line detection of drowsiness using brain and visual information. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 764–775. [Google Scholar] [CrossRef]
- Correa, A.G.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med. Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Young-Chung, G. Detection of driver drowsiness using wavelet analysis of heart rate variability and a support vector machine classifier. Sensors 2013, 13, 16494–16511. [Google Scholar] [CrossRef] [PubMed]
- Jung, S.J.; Shin, H.S.; Chung, W.Y. Driver fatigue and drowsiness monitoring system with embedded electrocardiogram sensor on steering wheel. IET Intell. Transp. Syst. 2014, 8, 43–50. [Google Scholar] [CrossRef]
- Li, G.; Chung, W.Y. A context-aware EEG headset system for early detection of driver drowsiness. Sensors 2015, 15, 20873–20893. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Wang, H.; Fu, R. Automated detection of driver fatigue based on entropy and complexity measures. IEEE Trans. Intell. Transp. Syst. 2014, 15, 168–177. [Google Scholar] [CrossRef]
- Tianyi, M.A.; Cheng, B. Detection of driver’s drowsiness using facial expression features. J. Automot. Saf. Energy 2010, 1, 200–204. [Google Scholar]
- Minjie, W.; Ping, M.; Caiyan, Z. Driver fatigue detection algorithm based on the states of eyes and mouth. Comput. Appl. Softw. 2013, 30, 25–27. [Google Scholar]
- King, D.J.; Siegmund, G.P.; Montgomery, D.T. Outfitting a Freightliner Tractor for Measuring Driver Fatigue and Vehicle Kinematics During Closed-Track Testing; Technical Report; SAE Technical Paper: Warrendale, PA, USA, 1994. [Google Scholar]
- Wierwille, W.W.; Lewin, M.G.; Fairbanks, R.J. Research on Vehicle-Based Driver Status/performance Monitoring, Part I; Technical Report; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1996. [Google Scholar]
- Wierwille, W.W.; Lewin, M.G.; Fairbanks, R.J. Research on Vehicle-Based Driver Status/performance Monitoring, Part II; Technical Report; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1996. [Google Scholar]
- Wierwille, W.W.; Lewin, M.G.; Fairbanks, R.J. Research on Vehicle-Based Driver Status/performance Monitoring, Part III; Technical Report; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1996. [Google Scholar]
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting driver drowsiness based on sensors: A review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lu, M.; Li, K. Characterization of longitudinal driving behavior by measurable parameters. Transp. Res. Rec. J. Transp. Res. Board 2010, 2185, 15–23. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Zhang, D.; Li, K. An adaptive longitudinal driving assistance system based on driver characteristics. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1–12. [Google Scholar] [CrossRef]
- Wang, J.Q.; Li, S.E.; Zheng, Y.; Lu, X.Y. Longitudinal collision mitigation via coordinated braking of multiple vehicles using model predictive control. Integr. Comput. Aided Eng. 2015, 22, 171–185. [Google Scholar]
- Fairclough, S.H.; Graham, R. Impairment of driving performance caused by sleep deprivation or alcohol: A comparative study. Hum. Factors J. Hum. Factors Ergonom. Soc. 1999, 41, 118–128. [Google Scholar] [CrossRef] [PubMed]
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef]
- Otmani, S.; Pebayle, T.; Roge, J.; Muzet, A. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiol. Behav. 2005, 84, 715–724. [Google Scholar] [CrossRef] [PubMed]
- Feng, R.; Zhang, G.; Cheng, B. An on-board system for detecting driver drowsiness based on multi-sensor data fusion using Dempster-Shafer theory. In Proceedings of the International Conference on Networking, Sensing and Control (ICNSC’09), Okayama, Japan, 26–29 March 2009; pp. 897–902.
- Ingre, M.; ÅKerstedt, T.; Peters, B.; Anund, A.; Kecklund, G. Subjective sleepiness, simulated driving performance and blink duration: Examining individual differences. J. Sleep Res. 2006, 15, 47–53. [Google Scholar] [CrossRef] [PubMed]
- Mets, M.A.; Kuipers, E.; Senerpont Domis, L.M.; Leenders, M.; Olivier, B.; Verster, J.C. Effects of alcohol on highway driving in the STISIM driving simulator. Hum. Psychopharmacol. Clin. Exp. 2011, 26, 434–439. [Google Scholar] [CrossRef] [PubMed]
- Das, D.; Zhou, S.; Lee, J.D. Differentiating alcohol-induced driving behavior using steering wheel signals. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1355–1368. [Google Scholar] [CrossRef]
- Bittner, R.; Hána, K.; Poušek, L.; Smrka, P.; Schreib, P.; Vysokỳ, P. Detecting of fatigue states of a car driver. In Medical Data Analysis; Springer: Berlin, Germany, 2000; pp. 260–273. [Google Scholar]
- Krajewski, J.; Golz, M.; Sommer, D. Detecting sleepy drivers by pattern recognition based analysis of steering wheel behaviour. In Der Mensch im Mittelpunkt Technischer Systeme; VDI-Verlag: Düsseldorf, Germany, 2009; Volume 29, pp. 288–291. [Google Scholar]
- Zhang, X.; Cheng, B.; Feng, R. Real-time detection of driver drowsiness based on steering performance. J. Tsinghua Univ. 2010, 7, 1072–1076. [Google Scholar]
- Qu, X.; Cheng, B.; Lin, Q.; Li, S. Drowsy driving detection based on driver’s steering operation characteristics. Automot. Eng. 2013, 35, 288–291. [Google Scholar]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [PubMed]
- Zhen, Z.; Yi, Z.; Chen, Z.; Tian, X.; Du, S.; Huang, R. Approximate entropy and support vector machines for electroencephalogram signal classification. Neural Regen. Res. 2013, 8, 1844–1852. [Google Scholar]
- He, Y.; Zhang, X. Approximate entropy analysis of the acoustic emission from defects in rolling element bearings. J. Vib. Acoust. 2012, 134, 969–970. [Google Scholar] [CrossRef]
- Lin, L.; Chu, F. Approximate entropy as acoustic emission feature parametric data for crack detection. Nondestruct. Test. Eval. 2011, 26, 119–128. [Google Scholar] [CrossRef]
- Yentes, J.M.; Hunt, N.; Schmid, K.K.; Kaipust, J.P.; McGrath, D.; Stergiou, N. The appropriate use of approximate entropy and sample entropy with short data sets. Ann. Biomed. Eng. 2013, 41, 349–365. [Google Scholar] [CrossRef] [PubMed]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed]
- Qu, X.; Chen, B. Detection of Driver Drowsiness Based on Steering Operation and Vehicle State. Master’s Thesis, Tsinghua University, Beijing, China, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fatigue Level | Fatigue Point | Feature Description |
|---|---|---|
| Awake | 1 | Eyes keep open, wink in a very short time, rapid eyeball movement, concentrate on driving, keep the head in line, and very mobile facial expressions |
| Drowsy | 2 | Eyelid closure occurs, cannot keep eye open like normal, blink is getting slower, slower eyeball movement, eyesight is strained, yawning, deep breaths, sighing, swallowing, cannot always concentrate on driving. Eyelid closure occurs often, heavy eyelids or eyes semi-open or very hard to keep eyes open, eyes close for a long time, dozing, head cocked to one side, cannot drive |
| Expert Decision | |||
|---|---|---|---|
| “Awake” (Level 0) | “Drowsy” (Level 1) | ||
| Automatic decision | “Awake” (level 0) | True Negative (TN) | False Negative (FN) |
| “Drowsy” (level 1) | False Positive (FP) | True Positive (TP) | |
| Expert Decision | |||
|---|---|---|---|
| “Awake” (Level 0) | “Drowsy” (Level 1) | ||
| Automatic decision | “Awake” (level 0) | 65 | 15 |
| “Drowsy” (level 1) | 27 | 84 | |
| Samples | 92 | 99 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Li, S.E.; Li, R.; Cheng, B.; Shi, J. Online Detection of Driver Fatigue Using Steering Wheel Angles for Real Driving Conditions. Sensors 2017, 17, 495. https://doi.org/10.3390/s17030495
Li Z, Li SE, Li R, Cheng B, Shi J. Online Detection of Driver Fatigue Using Steering Wheel Angles for Real Driving Conditions. Sensors. 2017; 17(3):495. https://doi.org/10.3390/s17030495
Chicago/Turabian StyleLi, Zuojin, Shengbo Eben Li, Renjie Li, Bo Cheng, and Jinliang Shi. 2017. "Online Detection of Driver Fatigue Using Steering Wheel Angles for Real Driving Conditions" Sensors 17, no. 3: 495. https://doi.org/10.3390/s17030495