2. System Architecture
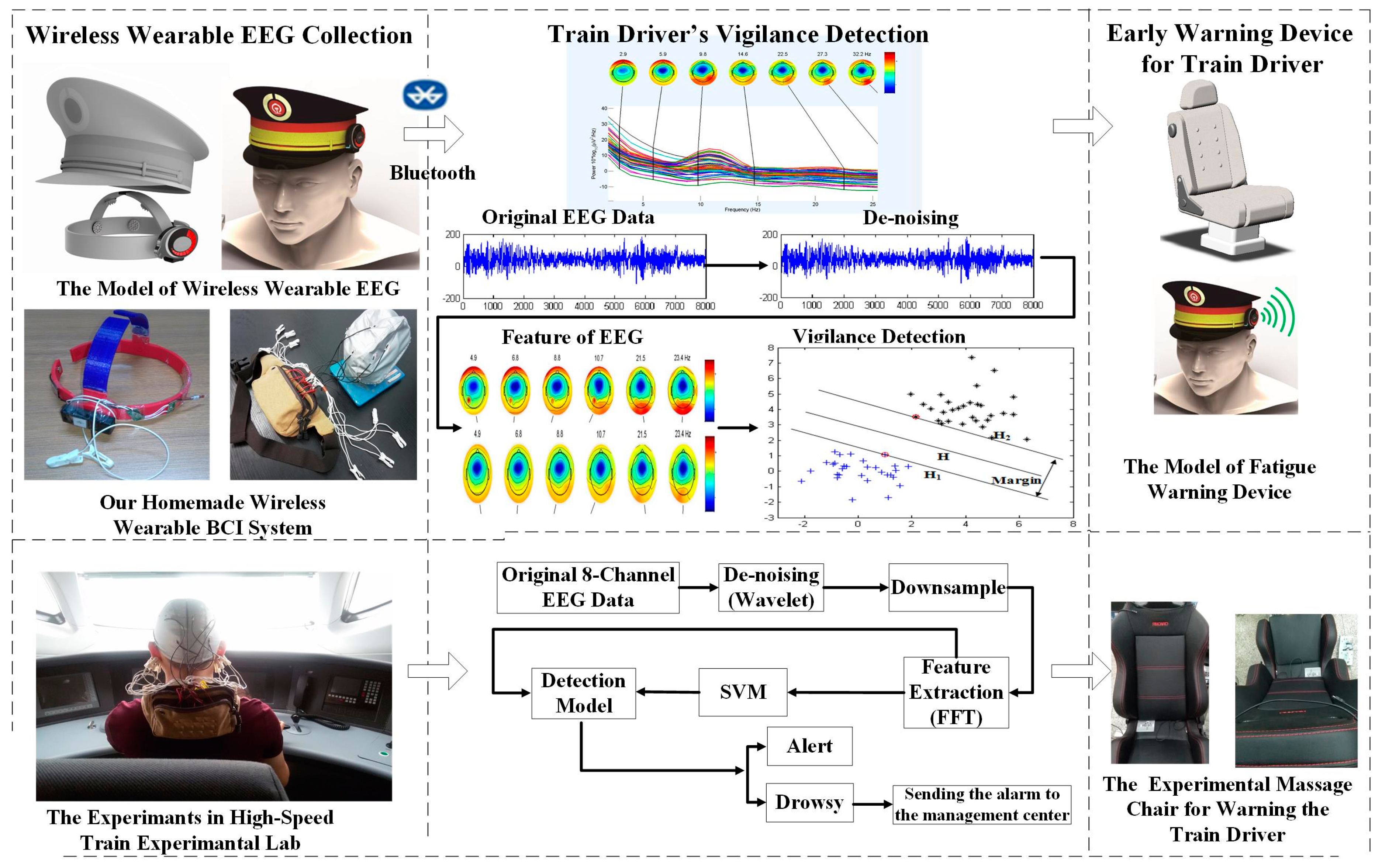
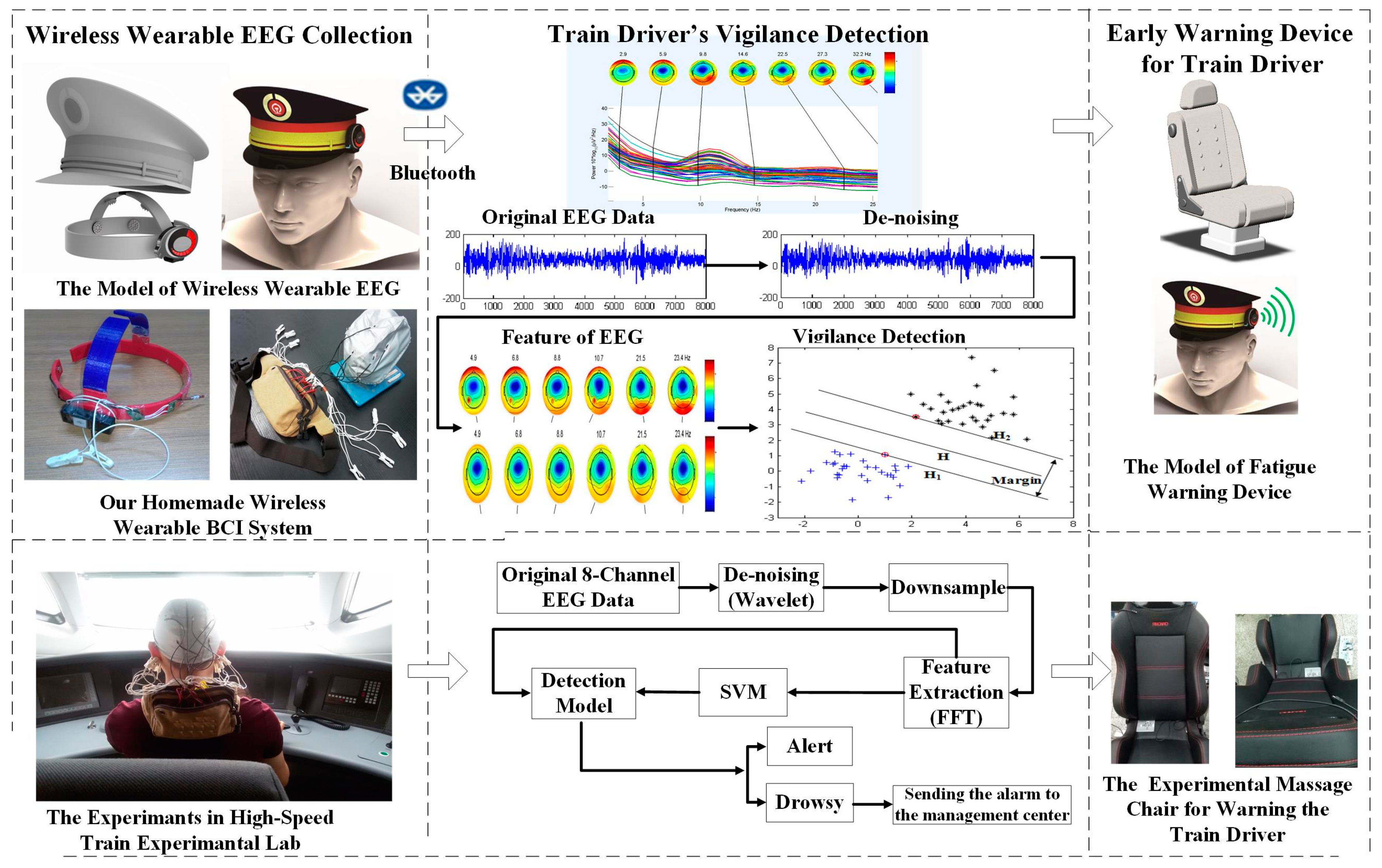
The general architecture of the fatigue detection system, as illustrated in
Figure 1, has three major steps: (1) the wireless wearable EEG collection system; (2) the train driver vigilance detection system; and (3) the early warning device.
In the first step, an eight-channel wireless wearable BCI system collects the driver’s EEG signal and transmits the recorded data to a PC/FPGA/DSP via a Bluetooth interface. As shown on the left of
Figure 1, a wireless wearable EEG collection system embedded in the driver’s cap is designed. The BCI system consists of eight stainless steel dry electrodes. It incorporates the use of a wireless and wearable EEG device to conveniently record EEG signals from the head regions of the train driver.
The second step is train driver vigilance detection using SVM with the FFT to extract the PSD of the EEG signal. As shown in the middle block of
Figure 1, after the original EEG signal is collected from the train driver’s head, a wavelet de-noising algorithm is implemented to remove interference, such as blinking (<5 Hz) and electromyography (>30 Hz). Then, the PSD is extracted as the feature of each state (alert/drowsy) using the FFT. Finally, an SVM algorithm is proposed to establish a vigilance detection model based on the training data. In this paper, two vigilance levels are defined: alert and drowsy. In the experiment and simulation, a personal computer is used to process the simulation data. The improved versions will be completed in the experiment using DSP or FPGA.
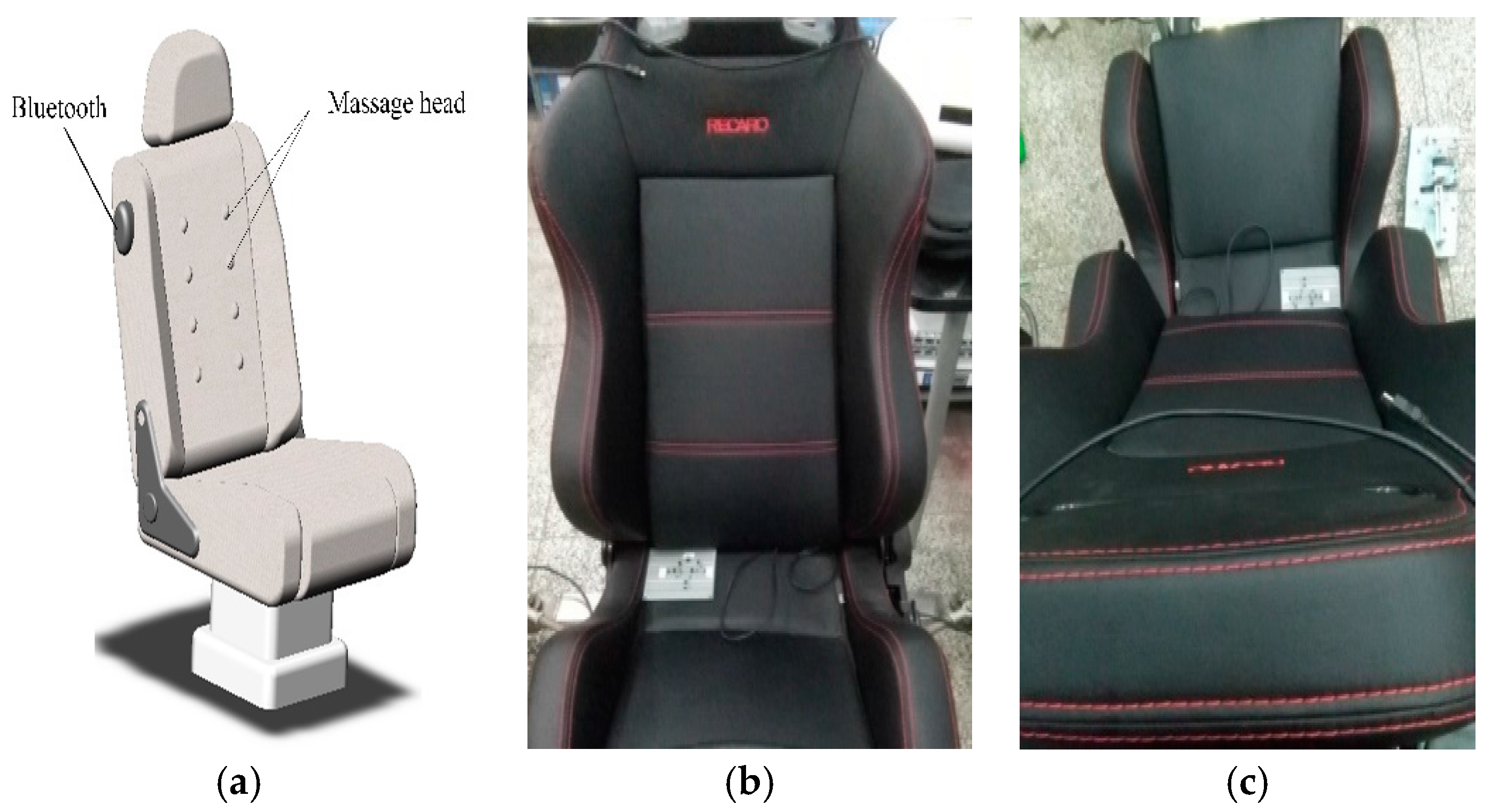
In the last step, as shown in the right part of
Figure 1, an early warning system is designed. When fatigue is detected, a massage chair begins to work to warn the high-speed train driver. At the same time, the early warning system messages about the high-speed train driver’s situation is sent to the TCC.
3. Wireless Wearable EEG System for High-Speed Train Drivers
EEG data are highly important to our train driver vigilance detection. To collect the EEG signal of the driver, an eight-channel wireless wearable BCI system is designed as shown in
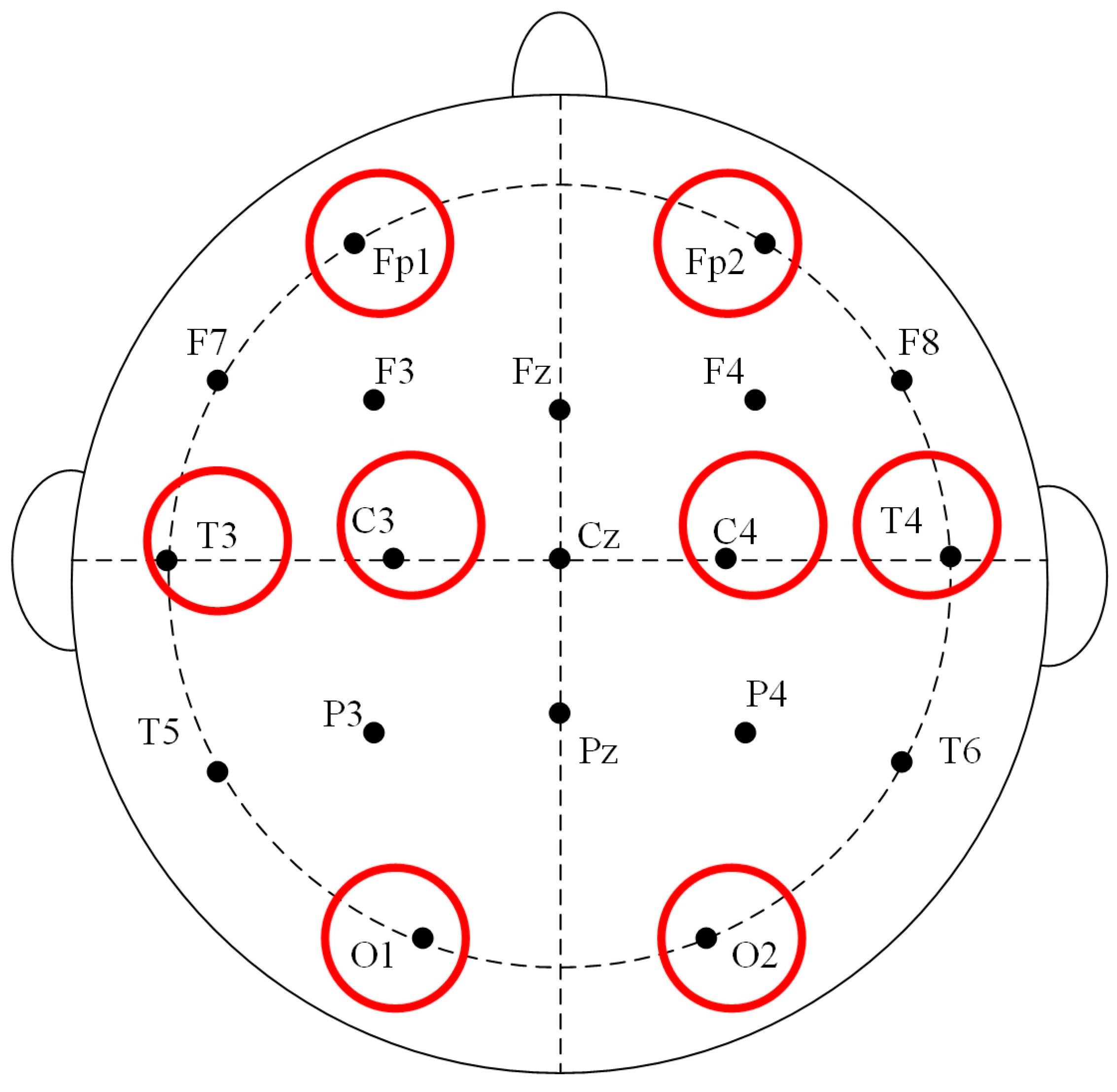
Figure 2. The electrodes, which are a type of sensor for EEG acquisition, are placed on the pre-frontal (Fp1, Fp2), temporal (T3, T4), posterior occipital (O1, O2), and central (C3, C4) regions of the cerebrum according to the 10–20 electrode system in
Figure 3. The signal process model stores the collected signal. The Bluetooth in front of the signal-processing model transmits the data to a PC. The power display outside the signal-processing model informs the user of how much power remains.
Figure 4 shows usage of the BCI system. By referencing the appearance of the train driver’s hat, the driver vigilance detection device can be easily embedded into the cap, and it hardly affects the driver’s operation.
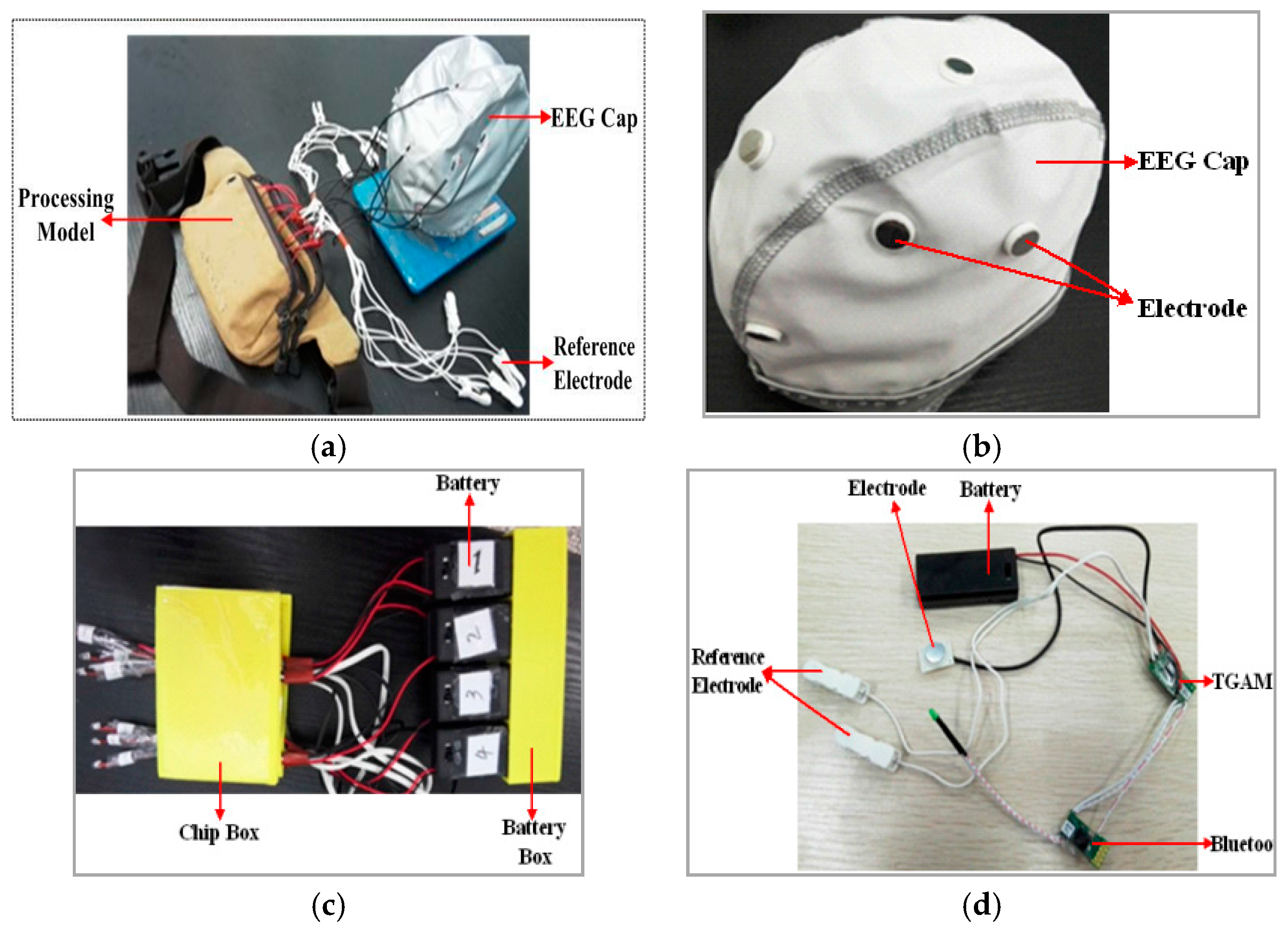
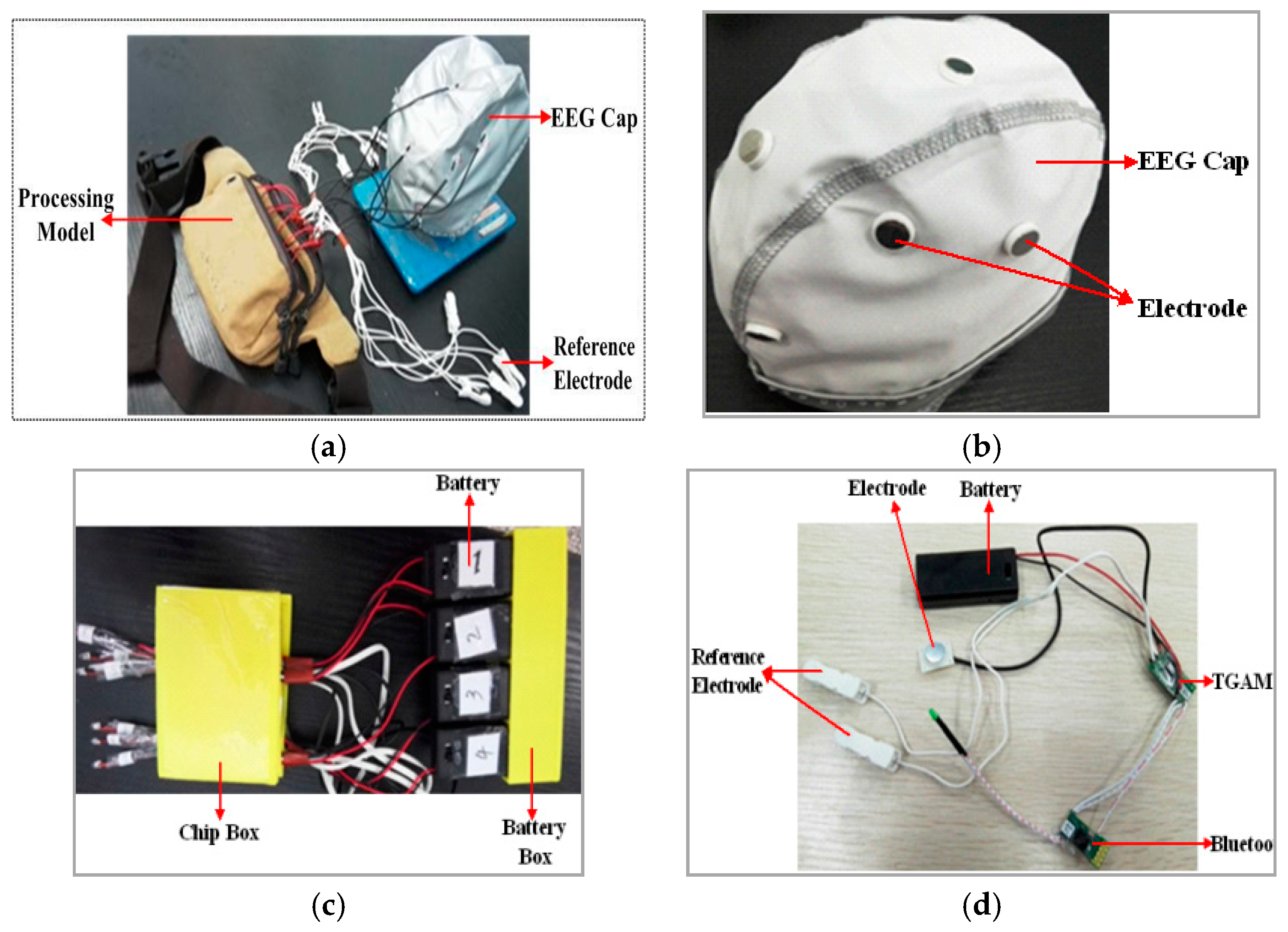
A set of high-comfort wireless wearable BCI equipment for testing and simulation in the lab has been made. The basic scheme of our homemade EEG-based BCI system is as proposed in
Figure 5. The BCI system consists of an EEG collection cap, reference electrodes, and processing model (see
Figure 5a). In
Figure 5b, the positions of eight dry electrodes installed in the EEG collection cap correspond to the cerebrum areas. The installation positions have close relationships with driver vigilance levels detection. In the homemade wireless wearable BCI system, the EEG collection cap is able to comfortably collect the train driver’s brain signal data for testing and simulation in the lab. There are eight single-channel EEG collection models. As shown in
Figure 5c, for a single model, the structure has a five-part structure: (1) a stainless steel dry electrode; (2) a TGAM model (the chip used to process the EEG signal); (3) a Bluetooth model; (4) a reference electrode; and (5) a battery model. The EEG signal is obtained by the stainless steel dry electrodes first and then amplified and filtered by the think gear basic module (TGAM) model with hardware filtering of 3 Hz to 100 Hz and a sampling rate of 512 Hz. Next, the EEG signal is transmitted to the PC via Bluetooth. The reference electrode provides the reference potential for the stainless steel dry electrode. The system is powered by eight 3-V DC batteries.
Figure 5d shows the processing model, including the TGMA, Bluetooth, and batteries installed into some boxes, which were designed by
SolidWorks software and manufactured by a 3D printer. Finally, all chips of the TGAM, Bluetooth and batteries are arranged into a bag, as shown in
Figure 5a, to make the equipment more wearable for train driver experiments.
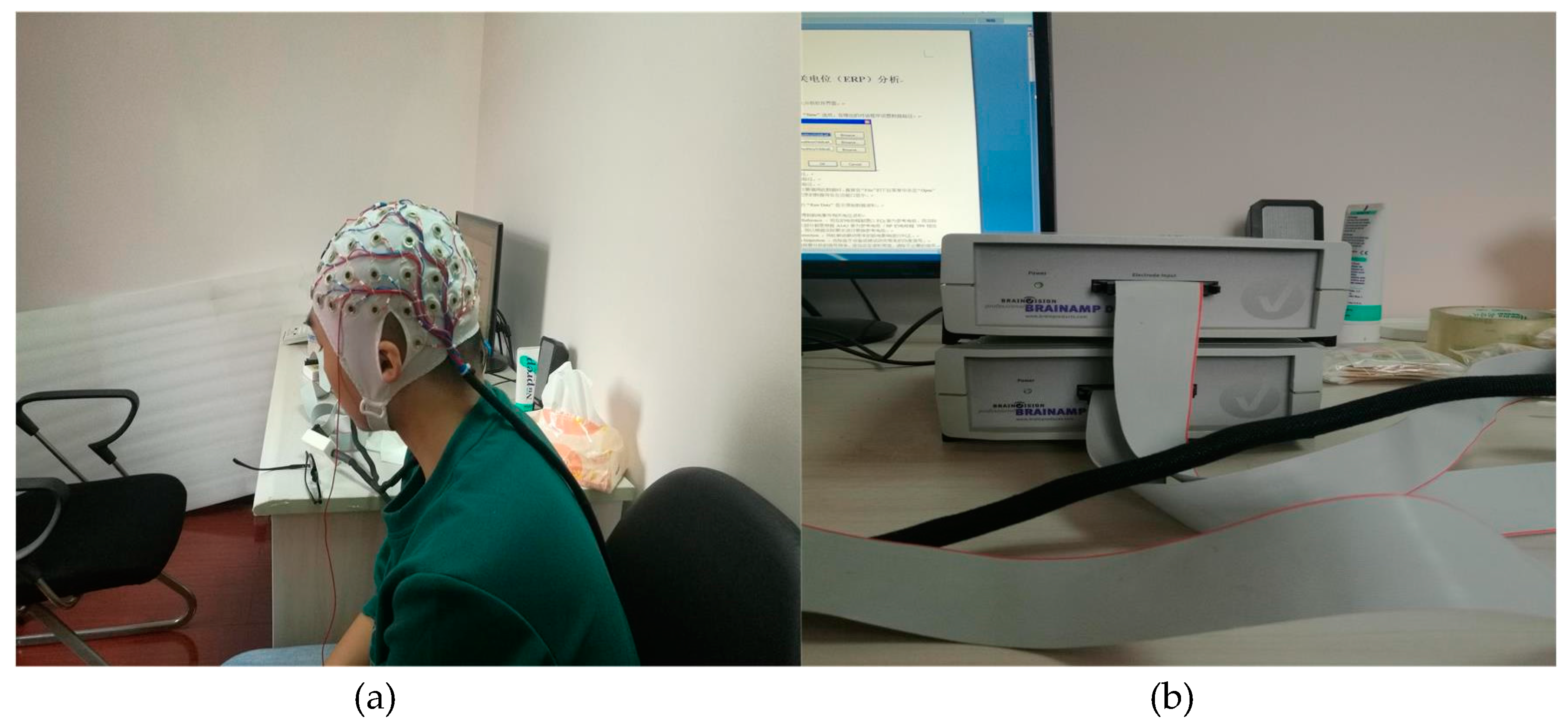
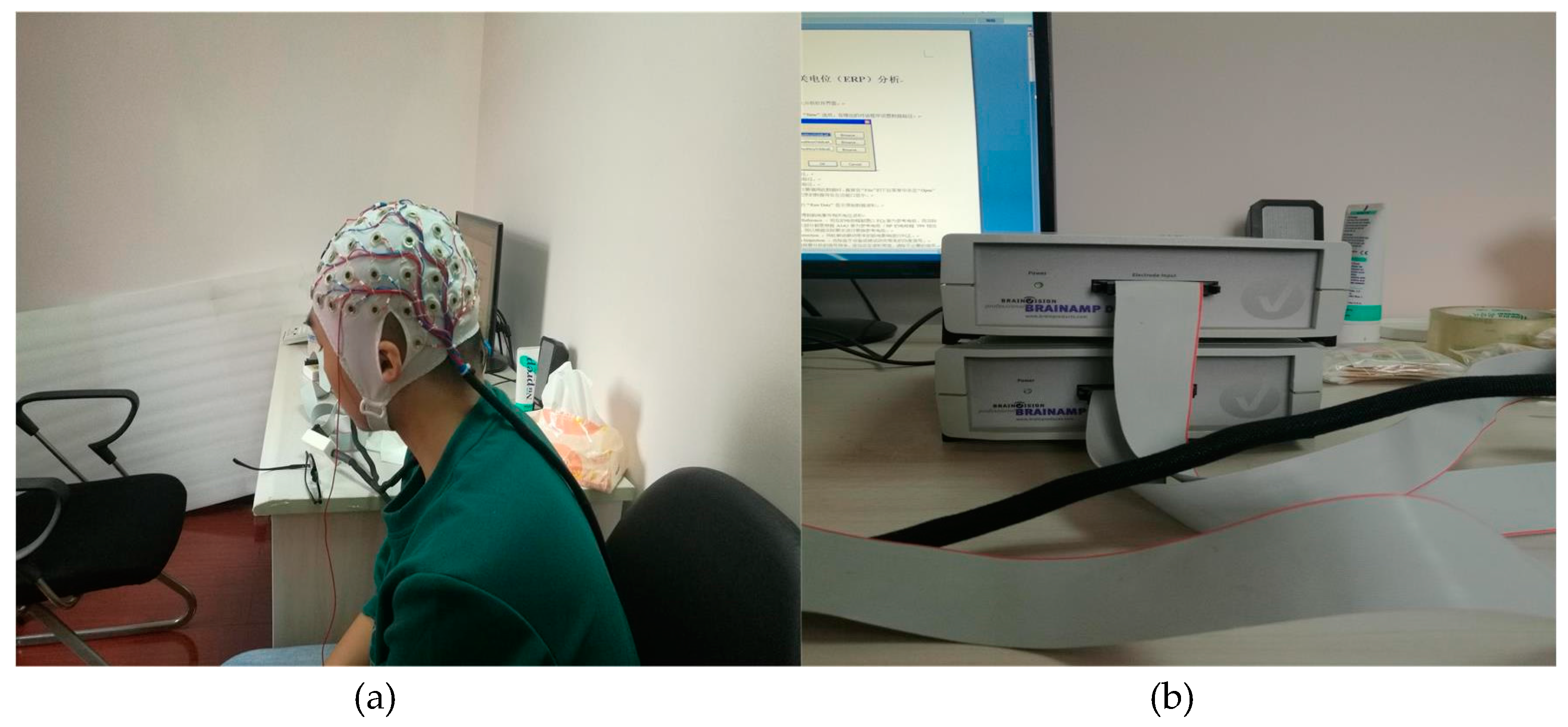
To validate the efficiency of our homemade wearable BCI system in data acquisition accuracy, a 64-channel EEG provided by Brain Products (BP, Gilching, Germany) was used.
As shown in
Figure 6, the commercial BP system consists of a Brain Cap, a Brain Amp, and the Recorder Analysis Software.
6. Experiments and Analysis
The goal of this section is to demonstrate experimentally and scientifically the validity of the proposed fatigue detection system for high-speed trains based on train driver vigilance using the wireless wearable EEG. It is extremely important to affect the high-speed train safety and avoid railway incidents and accidents. An experimental environment to evaluate the proposed system’s performance has been implemented in State Key Laboratory of Traction Power, Southwest Jiaotong University in China.
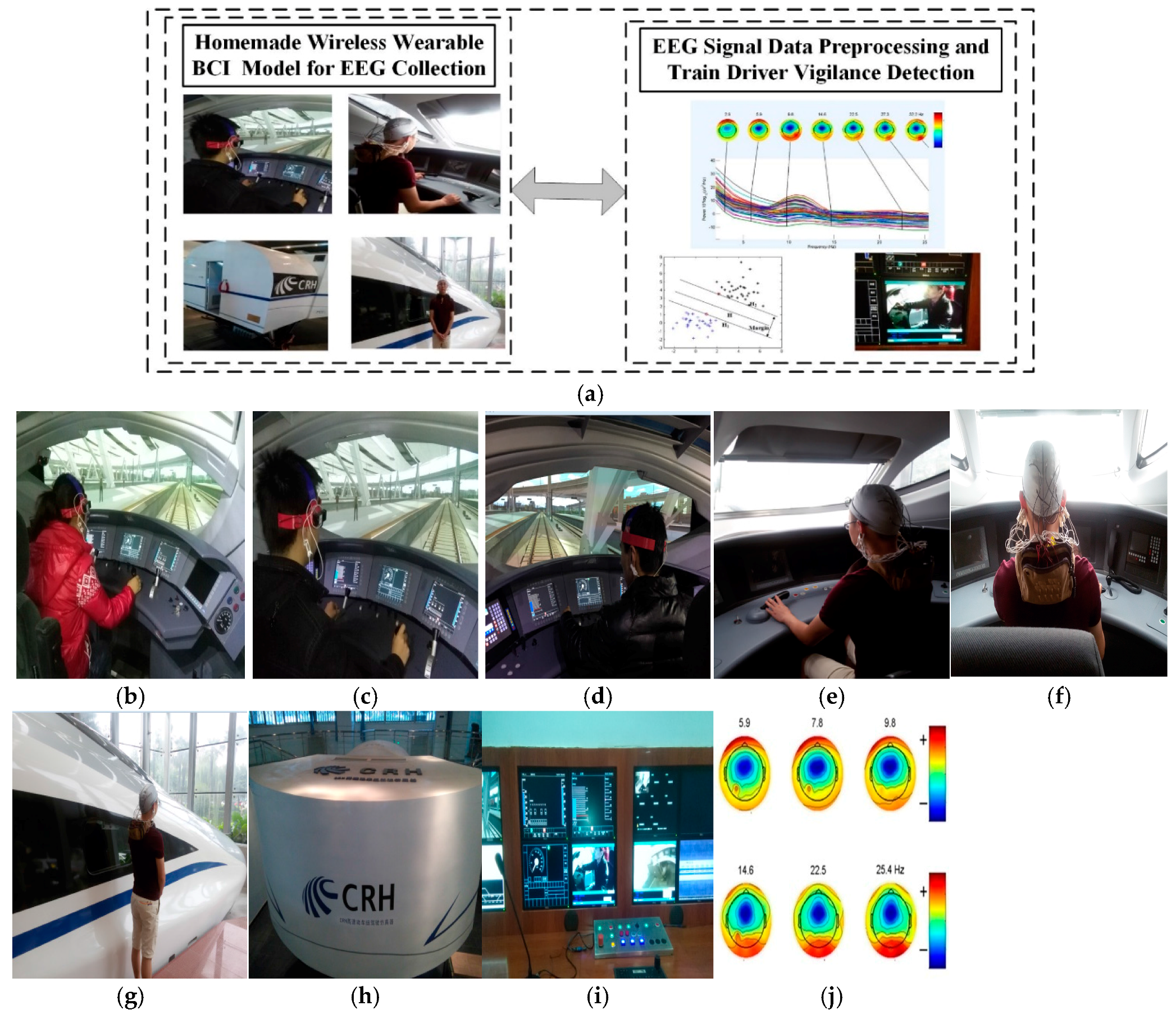
The experimental environment consists of three parts, as shown in
Figure 11a. The first part is a homemade wearable BCI model for the train driver’s EEG collection in our State Key Laboratory of Traction Power. The second part is the train driver’s EEG signal data pre-processing and driver vigilance detection model. As shown in
Figure 10, it is used in the virtual driving environment in the simulation centre of the State Key Laboratory of Traction Power, Southwest Jiaotong University for our proposed method.
Figure 11b–f illustrate the EEG collection and vigilance detection experiments in the State Key Laboratory of Traction Power, Southwest Jiaotong University.
Figure 11g,h are images of the high-speed train simulator of the simulation centre of the State Key Laboratory of Traction Power, which is the only high-speed simulator in the world.
Figure 11i is the operation interface of the high-speed train monitoring platform. The algorithm is implemented on a laptop computer equipped with an Intel i3 1.9-GHz CPU and 4 GB of RAM with Bluetooth for communication.
Figure 11j shows a sample image frame from the experiment on train driver vigilance detection.
In the experiment, ten qualified drivers with no neurological diseases wore the wireless wearable BCI system as in
Figure 11b–f, and the collected EEG signals are given in
Table 5. The experiments of EEG collection and diver vigilance detection are the actual data. To avoid the traffic risks of actual fatigue driving tests, the train driver experiments in the High-Speed Rail Simulator were finished in the State Key Laboratory of Traction Power. During the entire experiment, the investigators observed and recorded the subject’s physical behaviours, yawns and inclinations of the head as the drowsiness indices in a subsequent study. The train driver’s fatigue experimental conditions are set as follows:
Condition 1:
(1) sleep deprivation; (2) the test time is between 4 and 6 a.m. the next day.
Condition 2:
(1) having a normal night’s sleep; (2) the test time is between 9 and 11 a.m. the next day.
Condition 1 is identified as drowsiness, while condition 2 is identified as alertness.
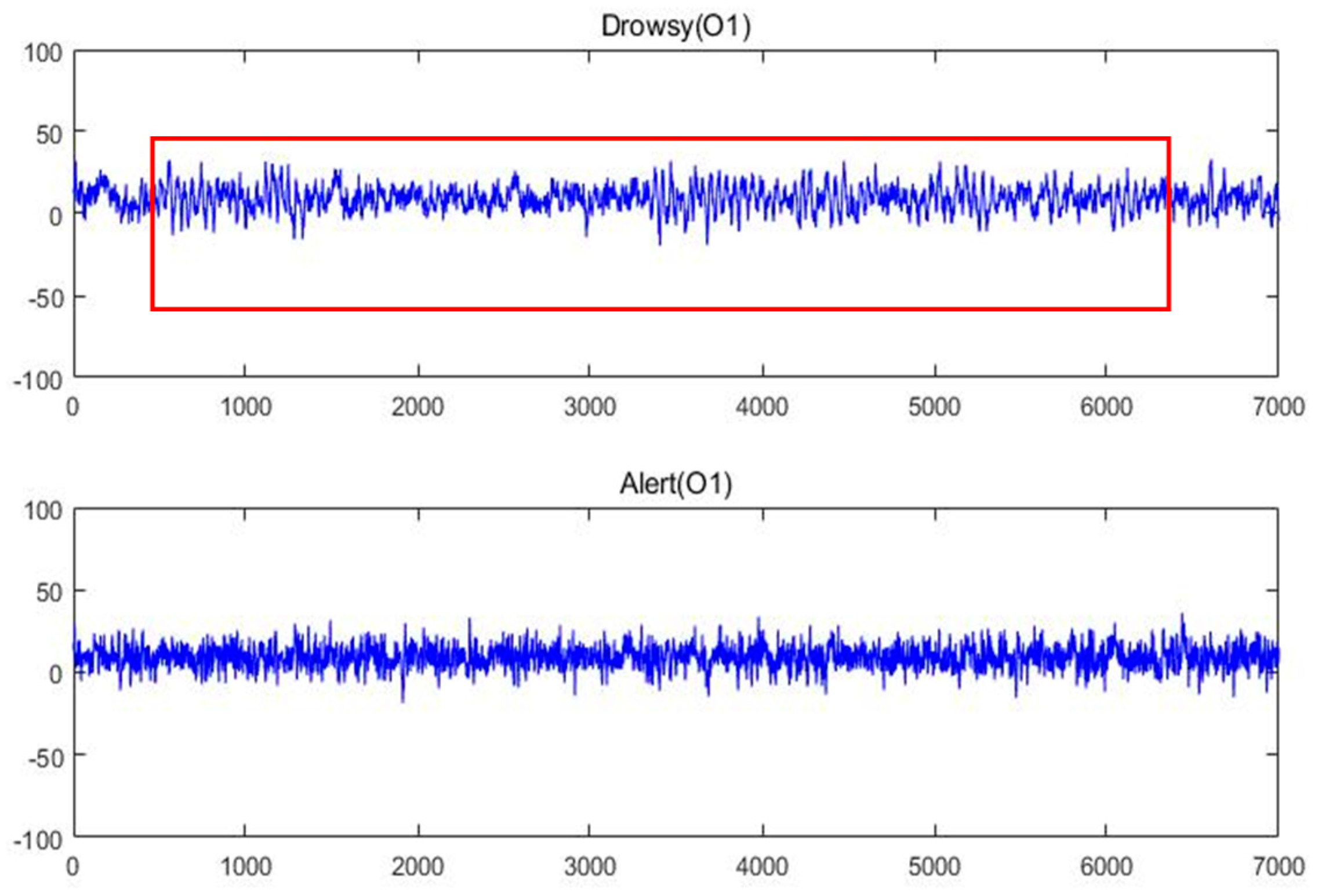
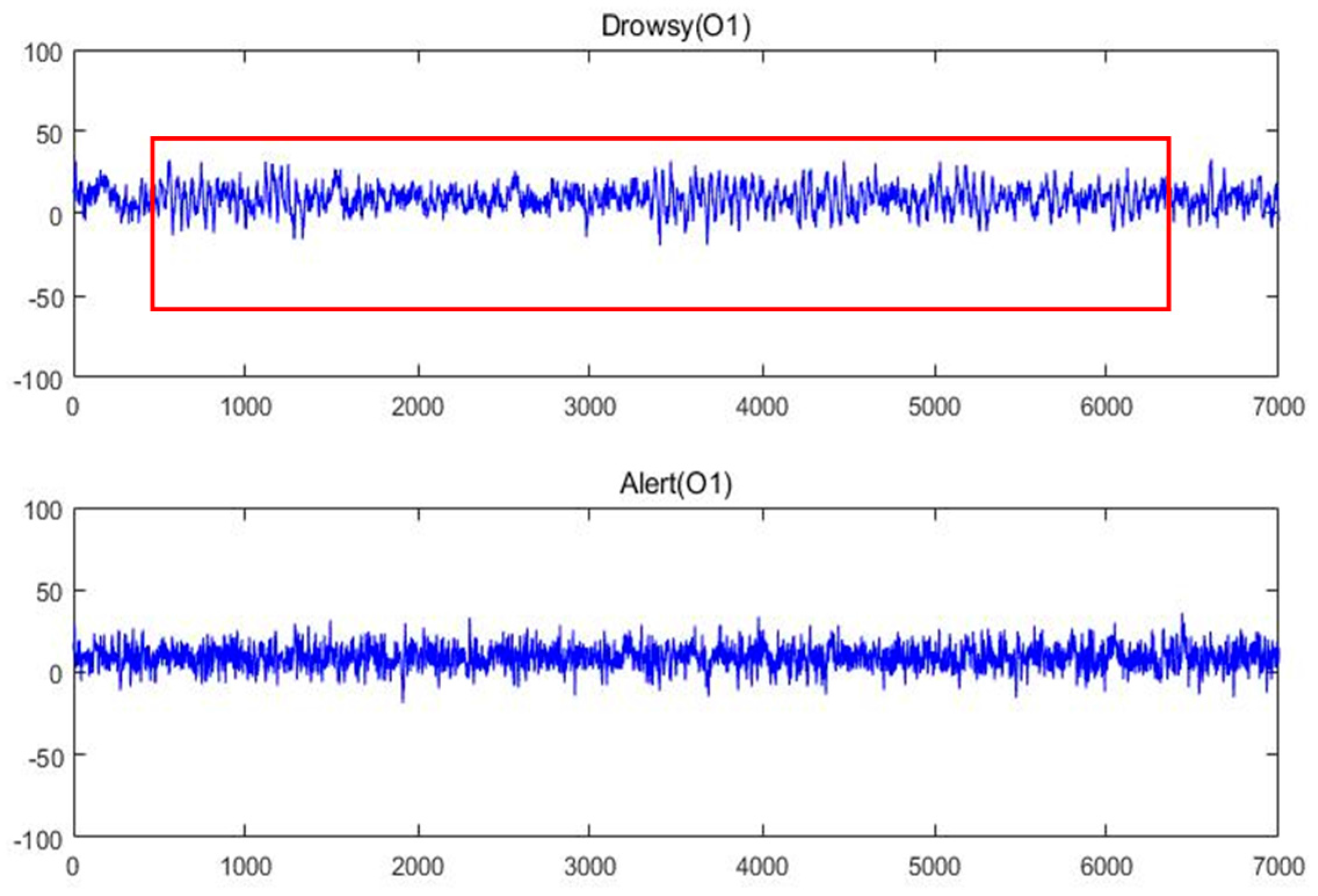
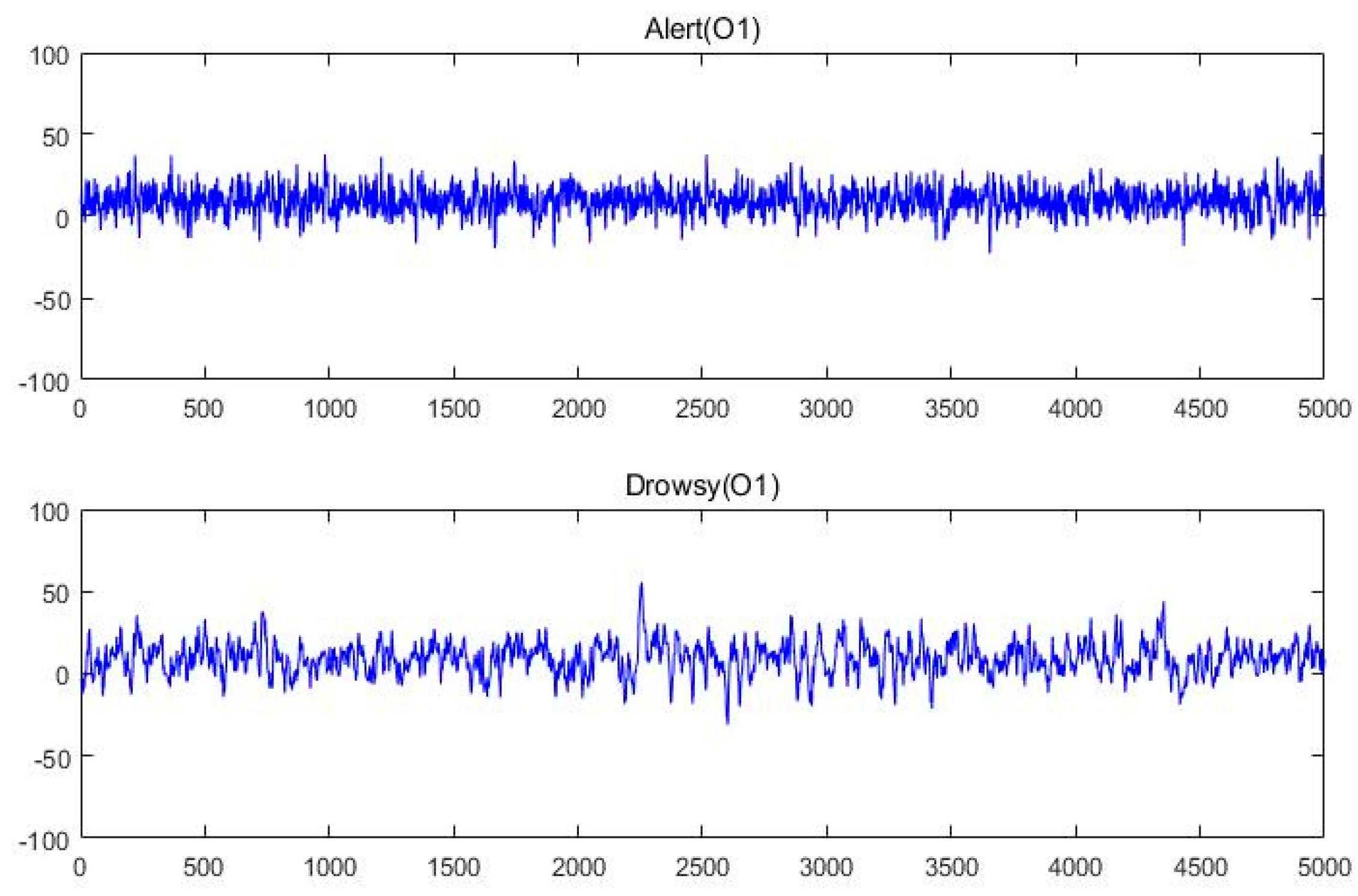
Figure 12 shows the raw EEG data of the drowsy state and the alert state from O1, whereas
Figure 13 shows the raw EEG data from BP equipment.
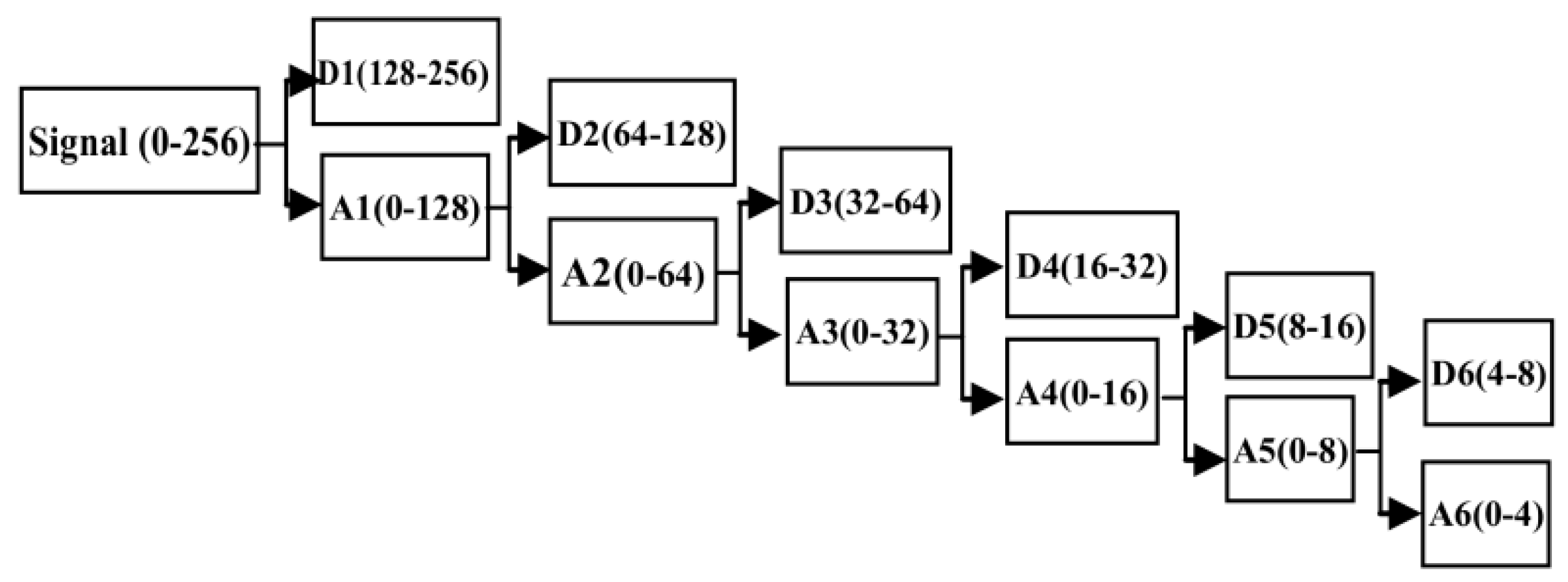
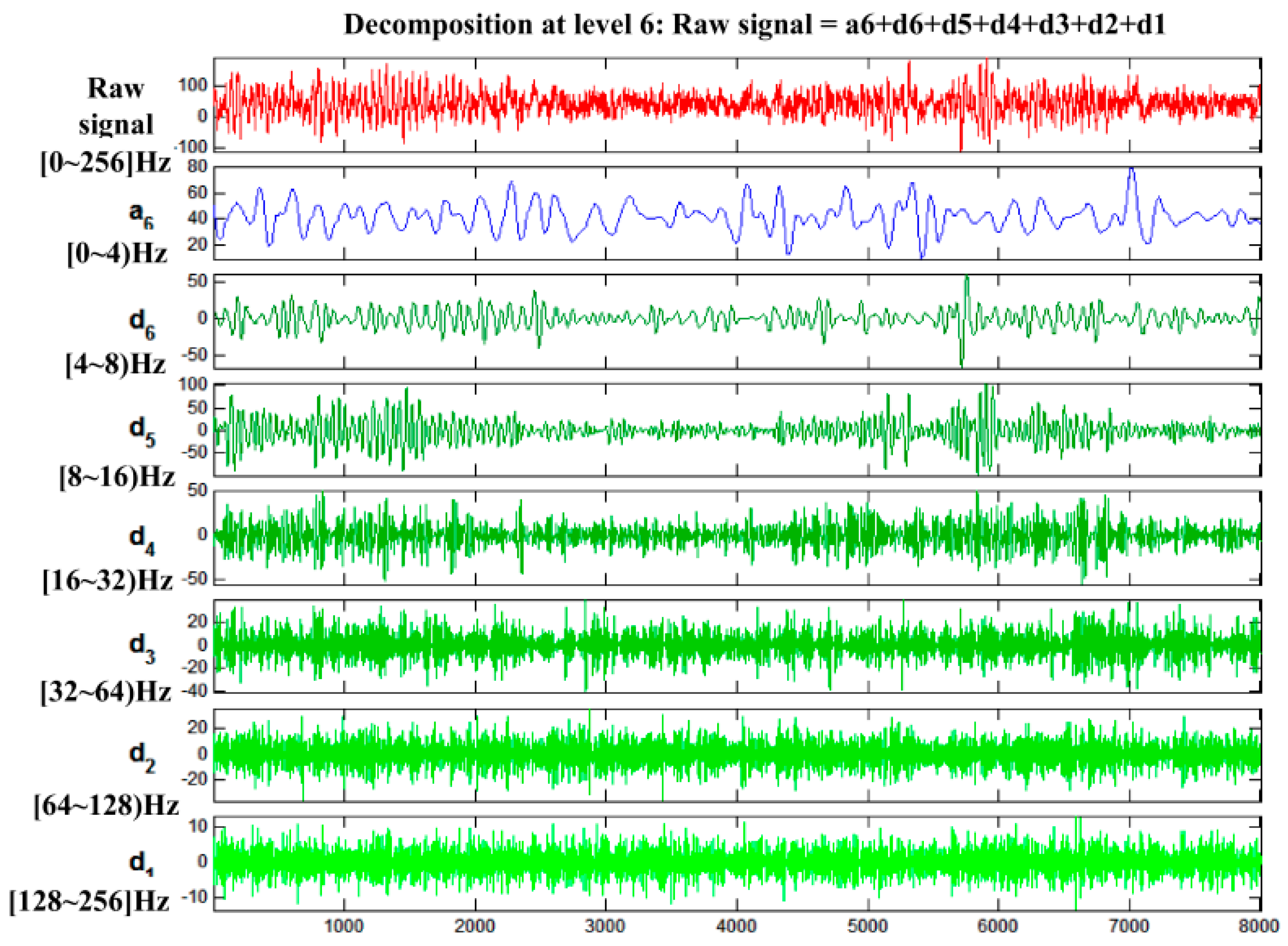
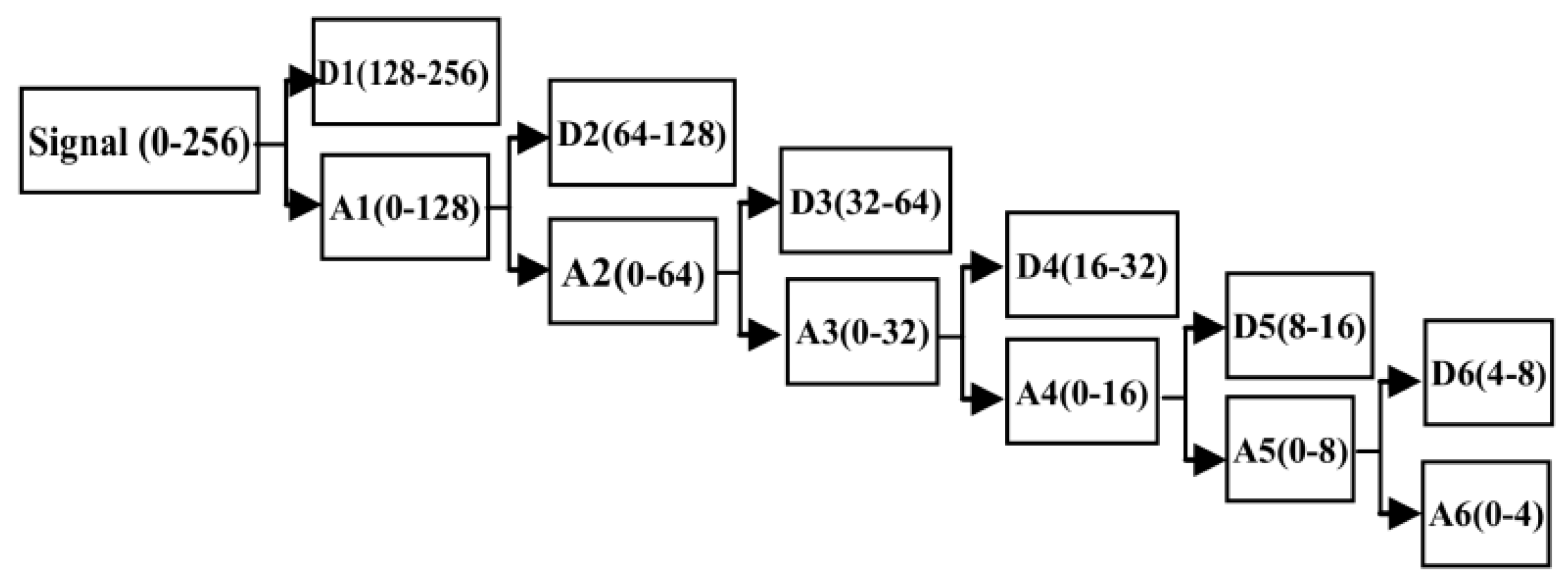
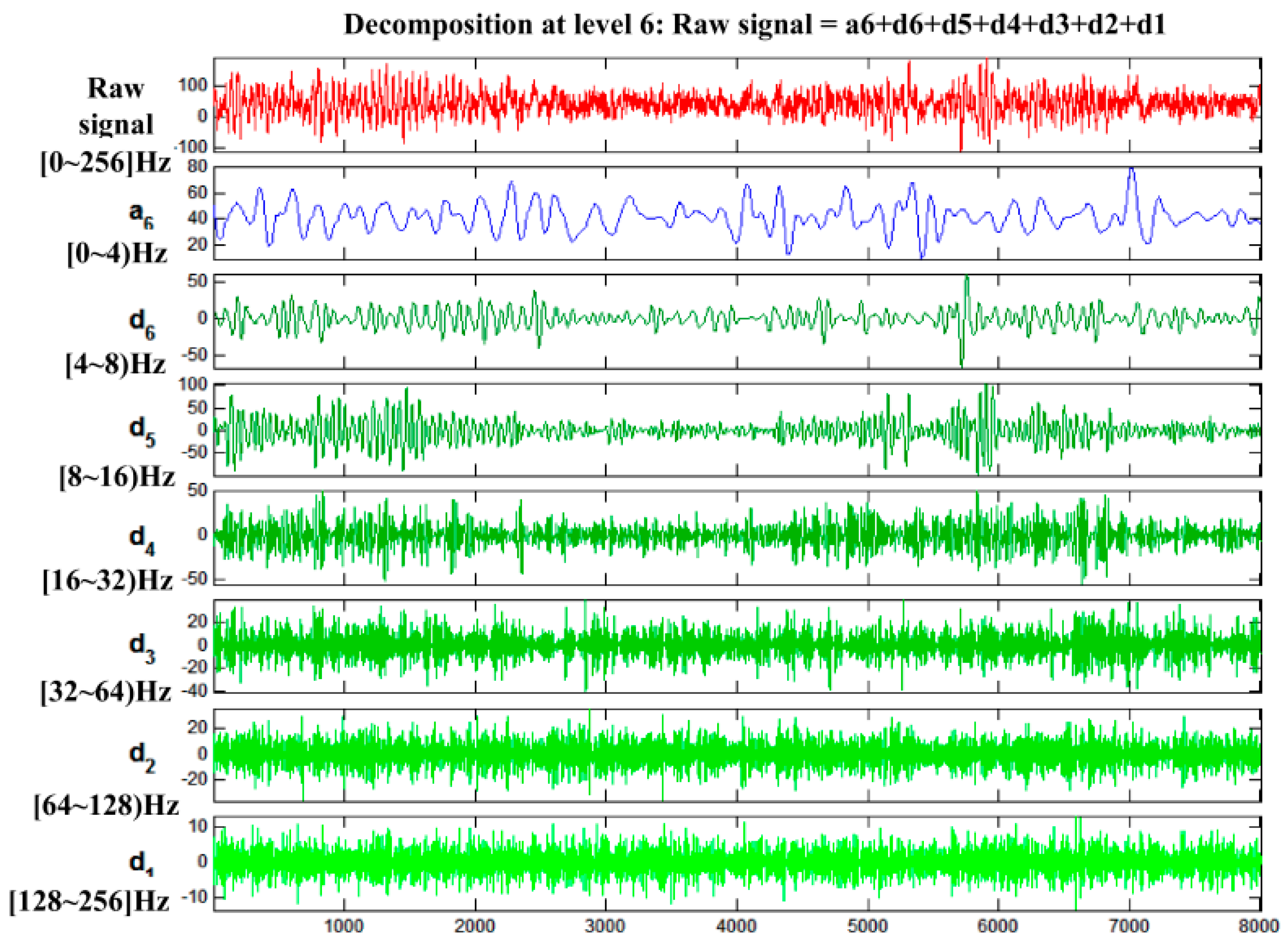
The good quality of our homemade BCI system is observed. The bursting of the alpha rhythm is observed as in the red box of the drowsy state. To remove the interference, a 6-layer decomposition of the db5 wavelet is implemented in the original EEG signal. The original signal and the decomposition signal at each level and the frequency of them are shown in
Figure 14. Because the hardware filter of our homemade equipment is 3–100 Hz, the signal of a6 can be regarded as noise. From
Figure 14, the level
d2 and level
d1 can be regarded as noise. Therefore, by extracting the decomposition signal of
d3 (32–64 Hz),
d4 (16–32 Hz),
d5 (8–16 Hz), and
d6 (4–8 Hz), the useful EEG signal is obtained and some low- and high-frequency interferences are removed.
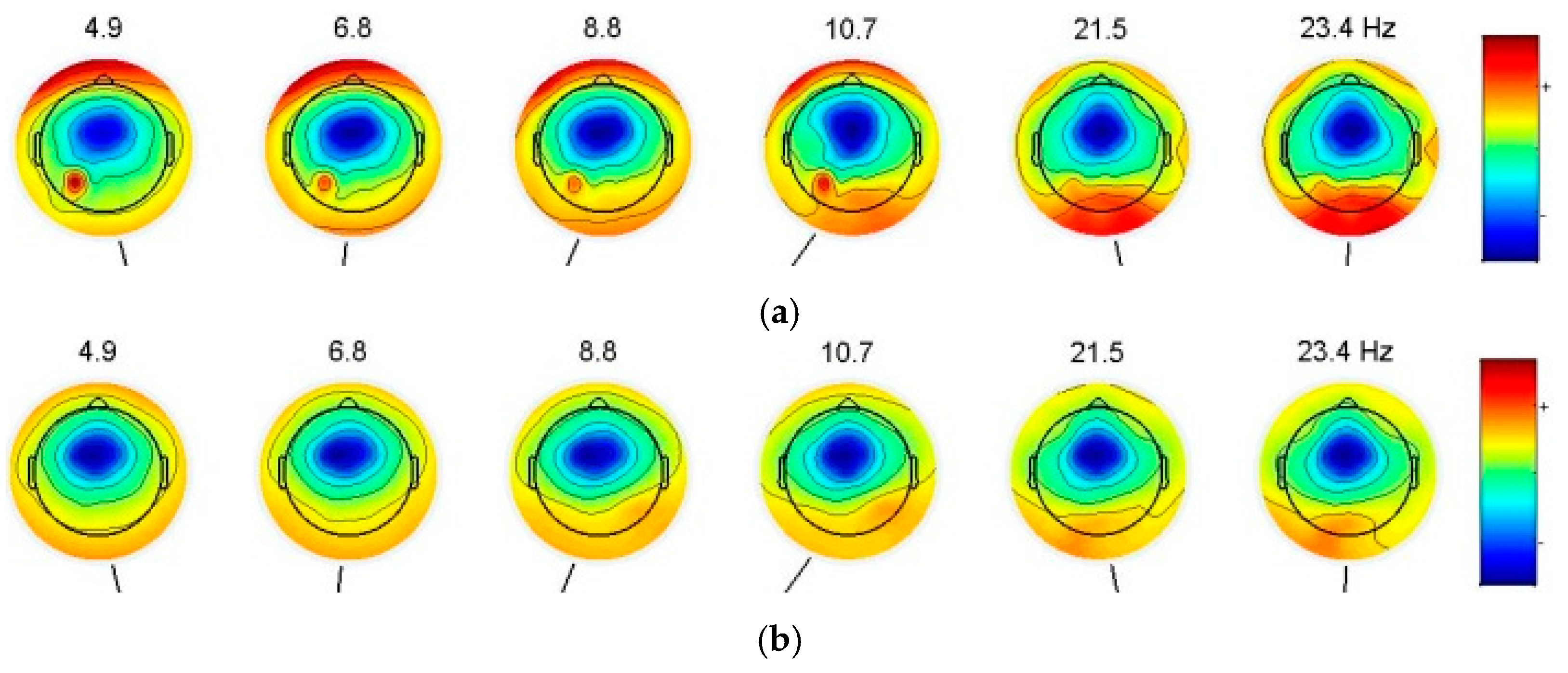
Libsvm-3.20, an SVM toolbox, was used in this paper to implement most functions, including data normalization, parameter optimization of the kernel function, training of the SVM classification model, and classification. Because of the excellent performance, the RBF kernel was used to map the training data to a higher-dimensional space. According to the frequency range of theta (4–8 Hz), alpha (8–14 Hz) and beta (14–34 Hz), these three frequency bands were used for feature extraction. The feature of the EEG signal at time
t was calculated as the average PSD from time
t −
r to time
t, and a Hanning window is used for feature extraction.
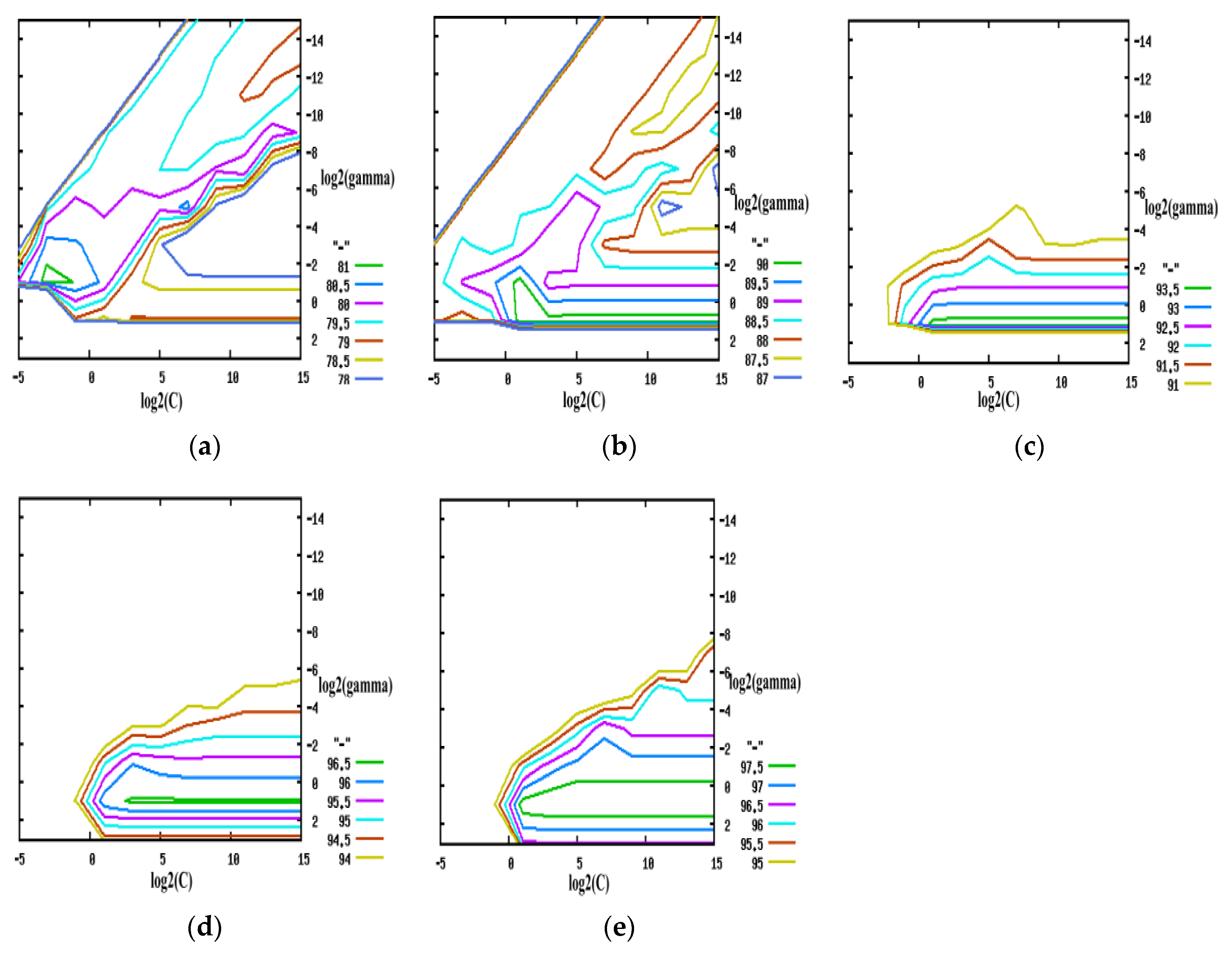
r is used for feature extraction as the time window. For different
r values, for example
r = 0, 1, 2, 3, and 4, the contour line of classification accuracy, as shown in
Figure 15, corresponds to different C (the error penalty parameter) and g (the parameter of the RBF kernel) values. This contour line provides optimal parameters of C and g, which maximize the classification accuracy, and it indicates that the optimal classification accuracy of the training data increases with the increase in
r. To validate the proposed algorithm, cross-validation whit leave-one-out method is utilized. We dividing the original data into three parts, and two parts are considered as training data, while the remain one is considered as testing data.
This paper detects driver’s vigilance level at a fixed frequency (
r = 0, 1, 2, 3, 4), the classification accuracy rate is defined as Equation (7):
Here correctly detection time presents the time which drowsiness is detected as drowsiness, while alertness is detected as alertness.
Besides, the sensitivity and the false positive are computed as Equations (8) and (9):
Here, true positive means the time which drowsiness is detected as drowsiness, while total actual positive means the actual drowsy time. Ture negative means which alertness is detected as alertness, while total actual negative means the actual alertness time.
Table 6 and
Table 7 show the average classification accuracy of O1 and O2, where drivers 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10 represent different train drivers. With the increase of
r, the classification accuracy rate increases. As in the red box of
Table 6 and
Table 7, the equipment yields excellent classification efficiency, which is as high as approximately 90.70%. And as shown in
Table 8,
Table 9,
Table 10 and
Table 11, the sensitivity can be as high as approximately 86.80%, while the false positive can be down to around 5.40% when
r = 4. In addition, the testing time of O1 and O2 as shown in
Table 12 and
Table 13, when
r = 4, the minimum time is 2.16 s, which shows the good performance in real-time of this system. All these results indicate the proposed method has good performance in high-speed train drivers’ vigilance detection.
Finally, other two related studies which is also involved EEG signal are compared. One is Lin et al. [
19], which proposed a BCI based smart living environmental auto-adjustment control system in UPnP home networking. They employed the Mahalanobis distance to estimate the human’s vigilance level. The other is Li et al. [
20]. They propose to apply SVM based posterior probabilistic model (SVMPPM) for automated drowsiness detection. Concrete details are seen in
Table 14.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}