
A Signal Processing Approach with a Smooth Empirical Mode Decomposition to Reveal Hidden Trace of Corrosion in Highly Contaminated Guided Wave Signals for Concrete-Covered Pipes

Abstract
:1. Introduction
2. Wavelet Transform (WT)
3. The Empirical Mode Decomposition (EMD)
- (1)
- In the whole dataset, the number of extrema and the number of zero-crossings need to be equal or only differ by one.
- (2)
- At any point, a mean value determined by local maxima envelop and local minima envelop is zero.
4. Smooth Empirical Mode Decomposition (SEMD)
- (1)
- Compute IMFi according to the procedure discussed in Section 3.
- (2)
- Calculate the wavelet coefficients according to the equation described in Section 2 based on tone-burst wavelet:
- (3)
- Estimate de-noised new wavelet coefficients by predefined positive value of threshold T:
- (4)
- Reconstruct IMFi’ from the de-noised coefficients through the inverse wavelet transform.
- (5)
- Subtract IMFi’ from x(t) and obtain the residue ri(t)
5. Experimental Validations
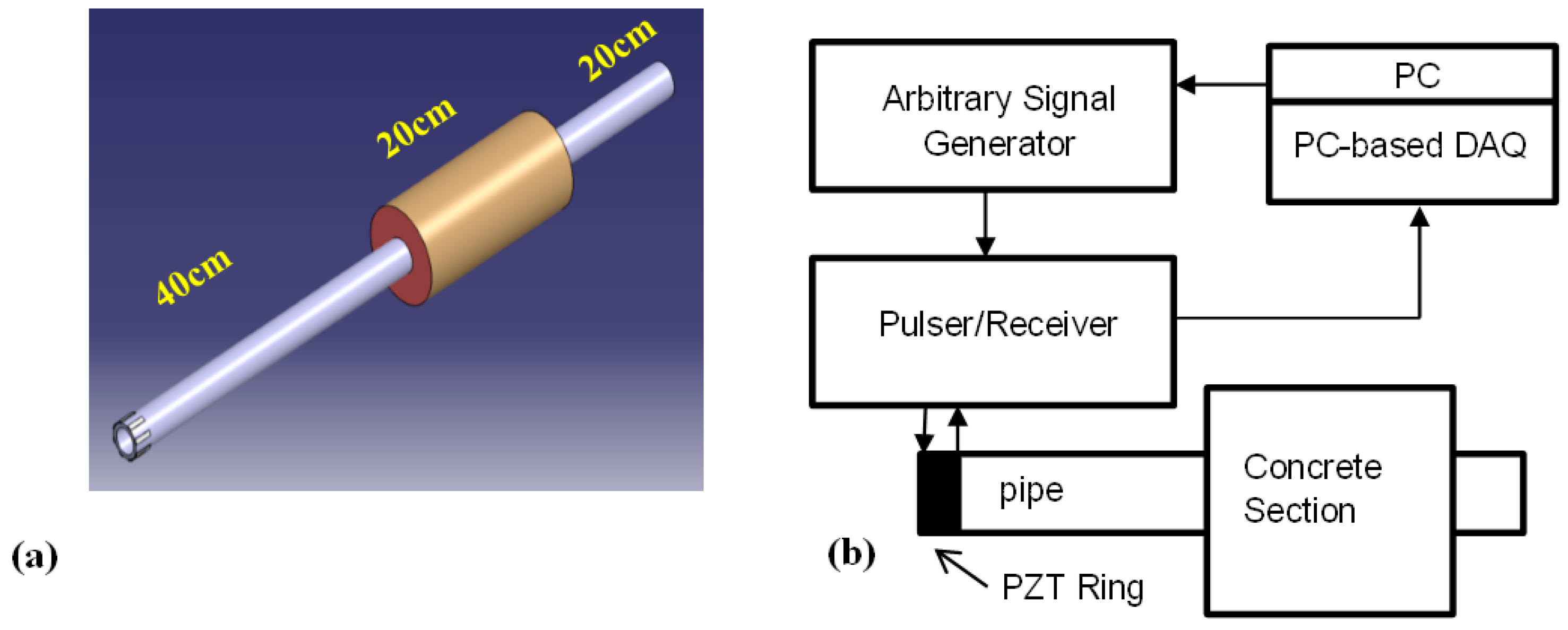
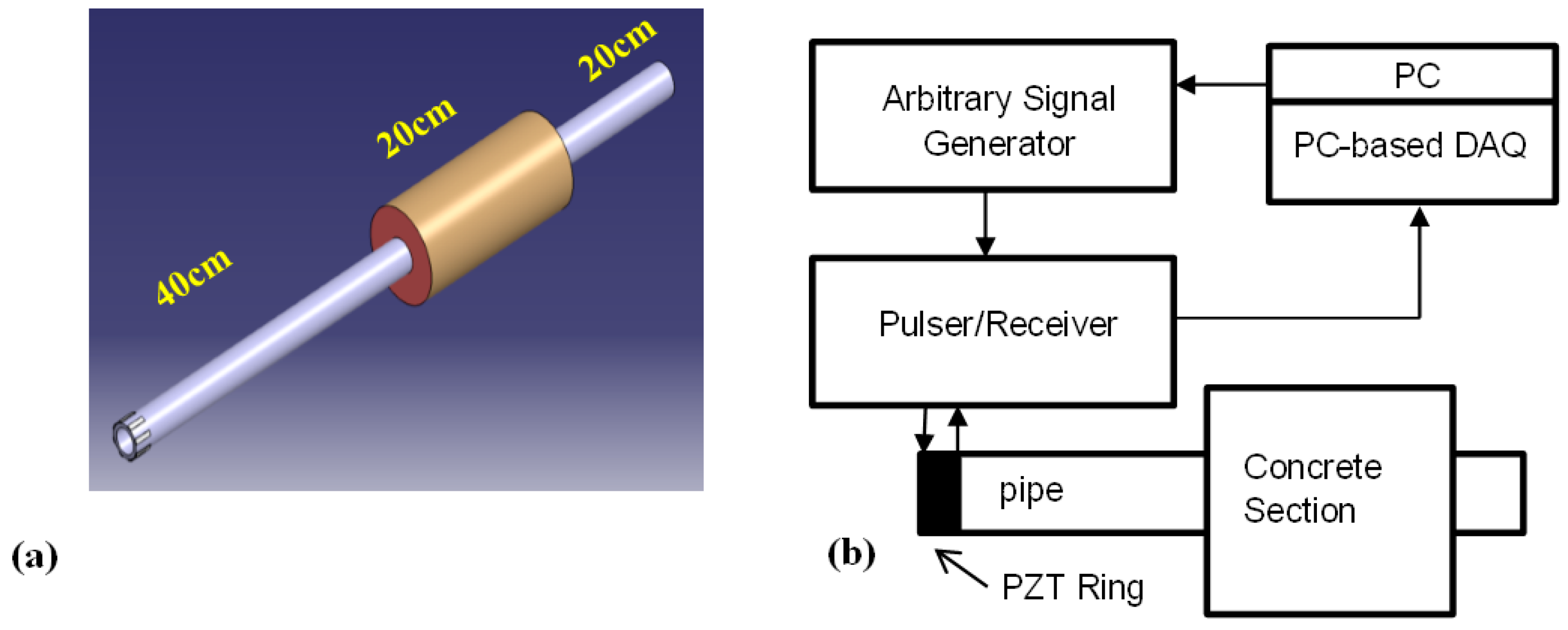
5.1. Experimental Setup
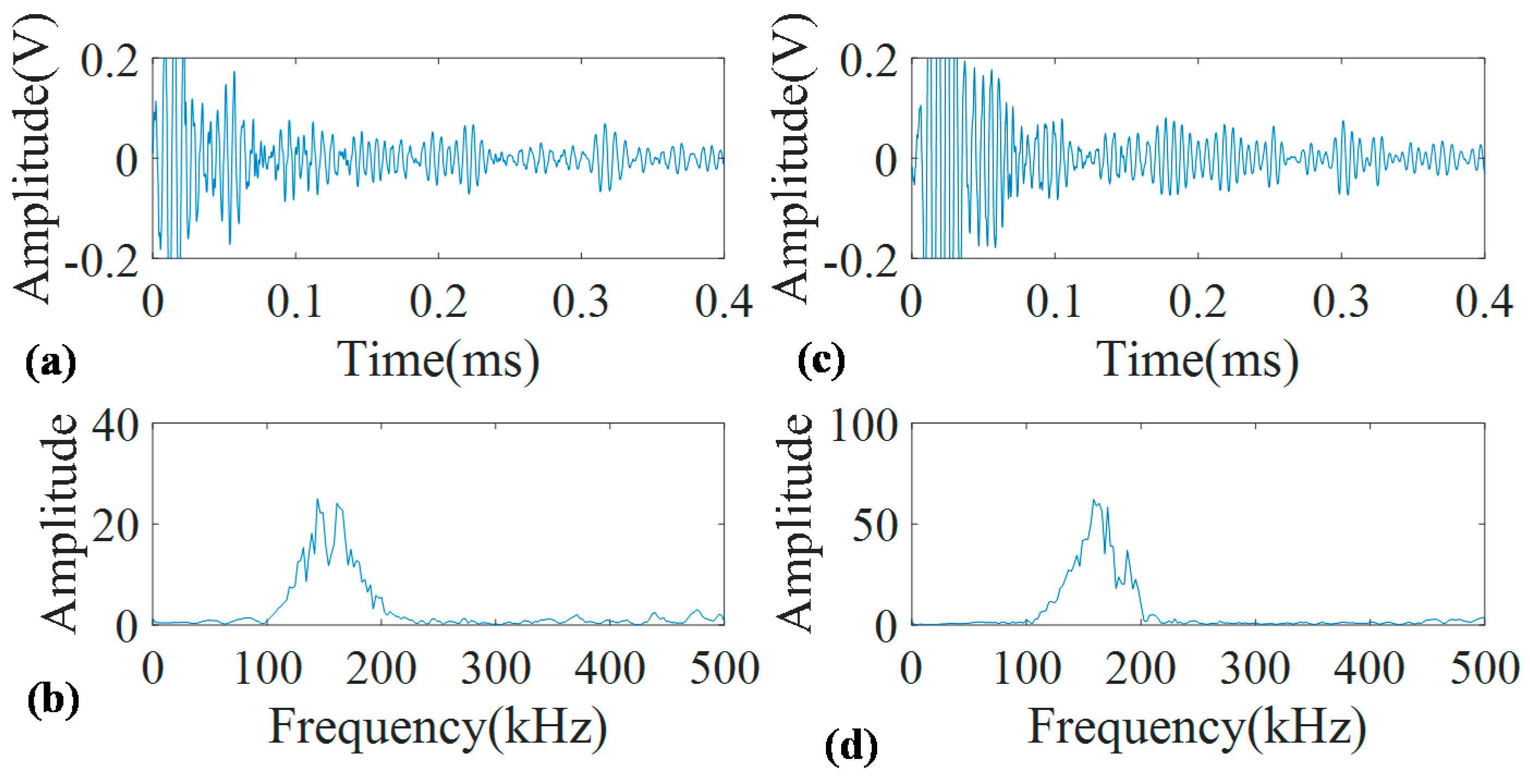
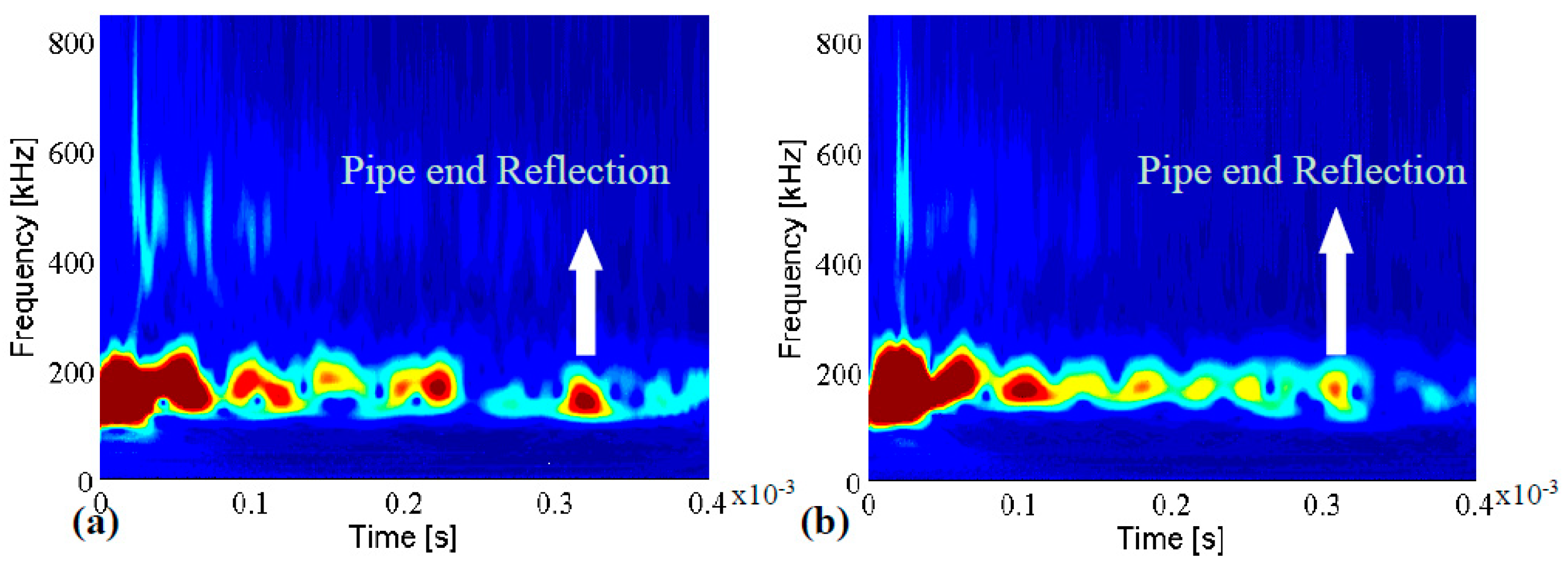
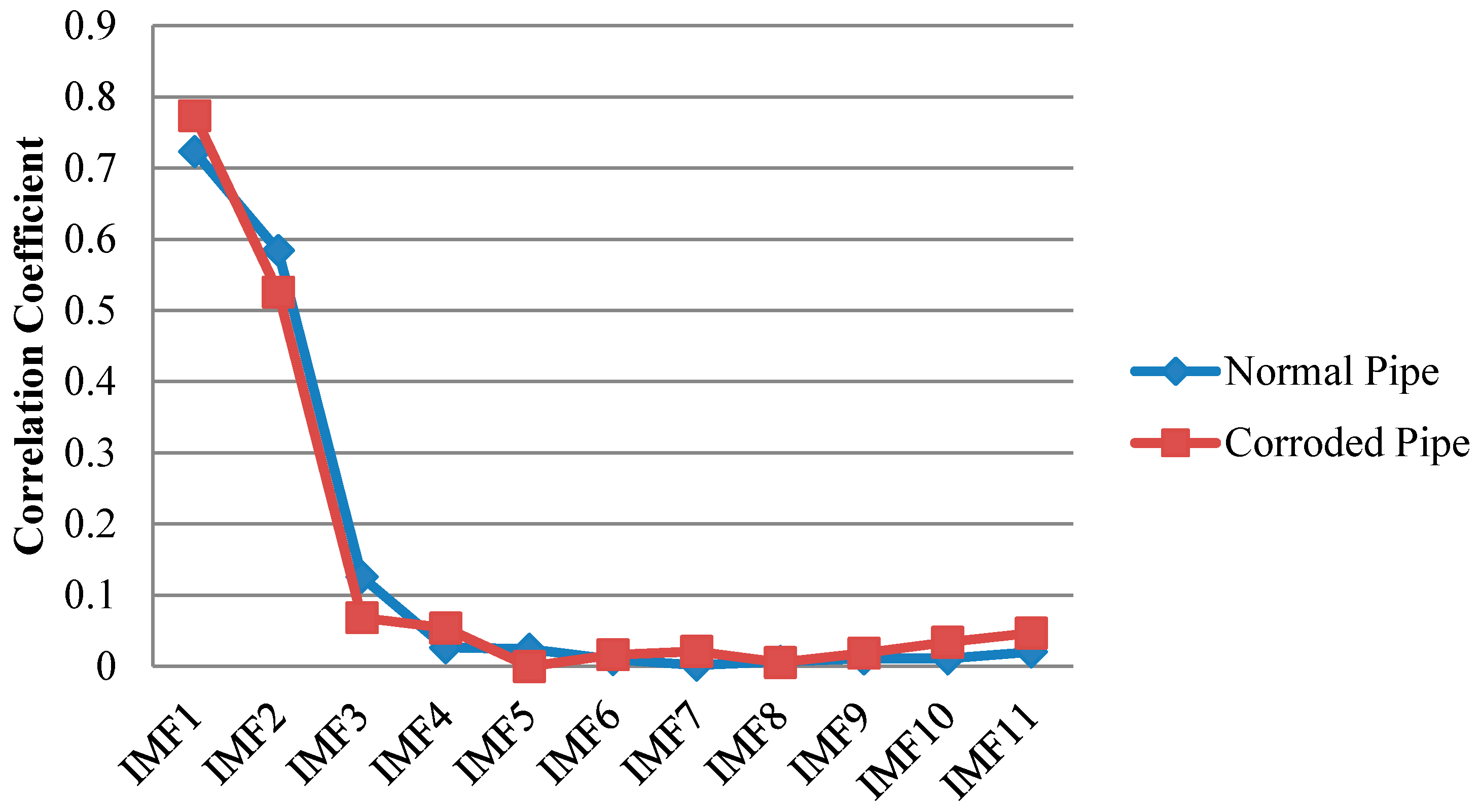
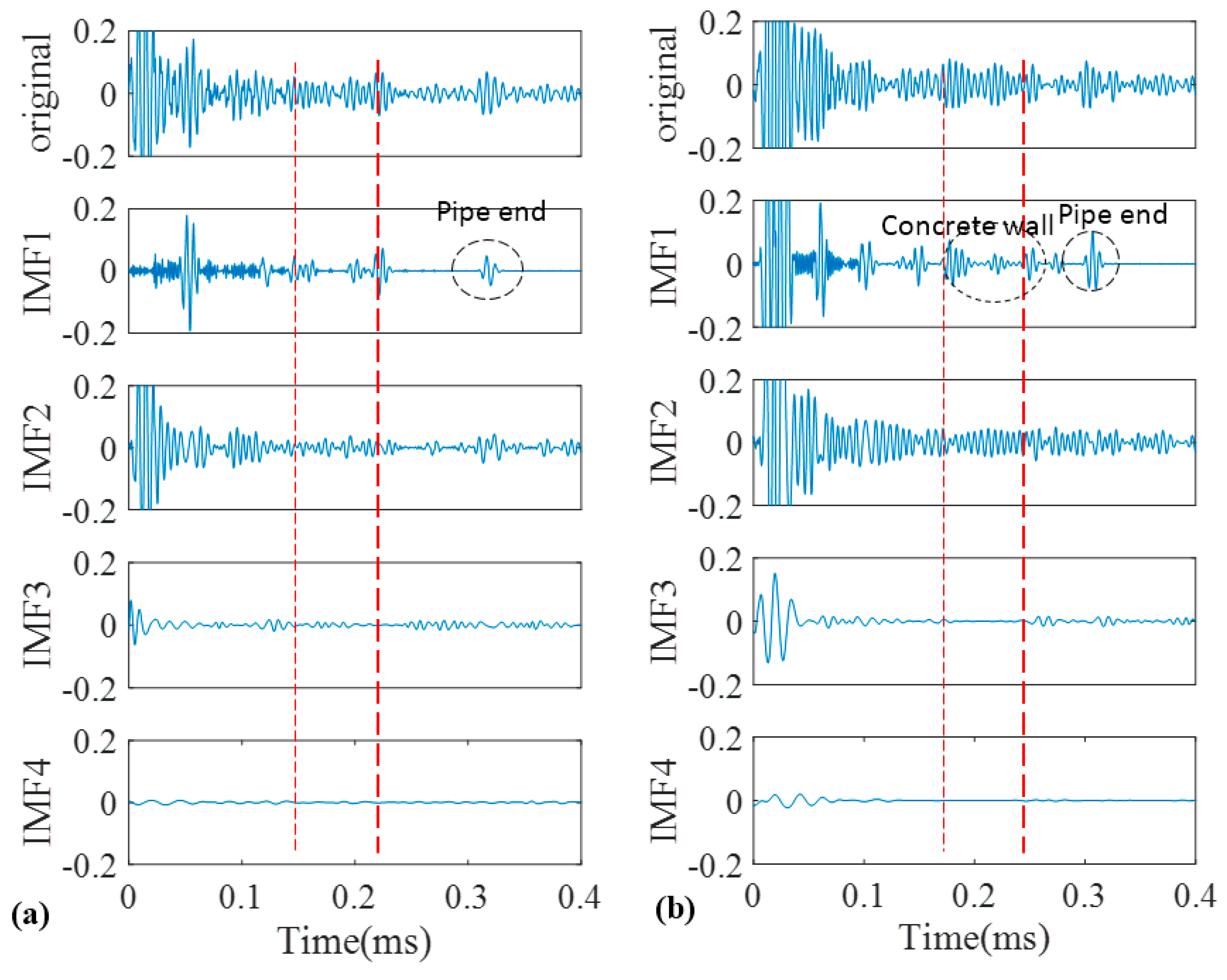
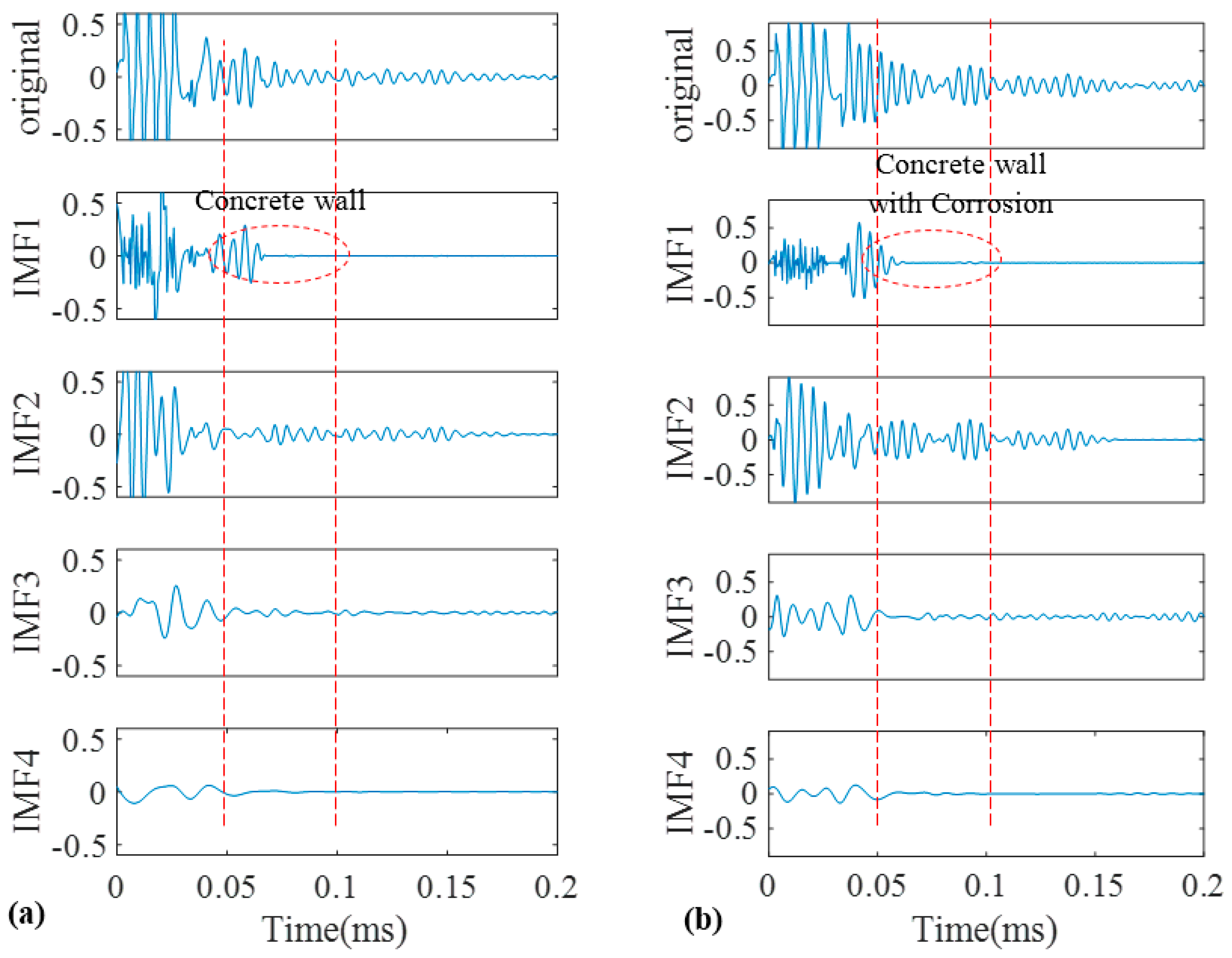
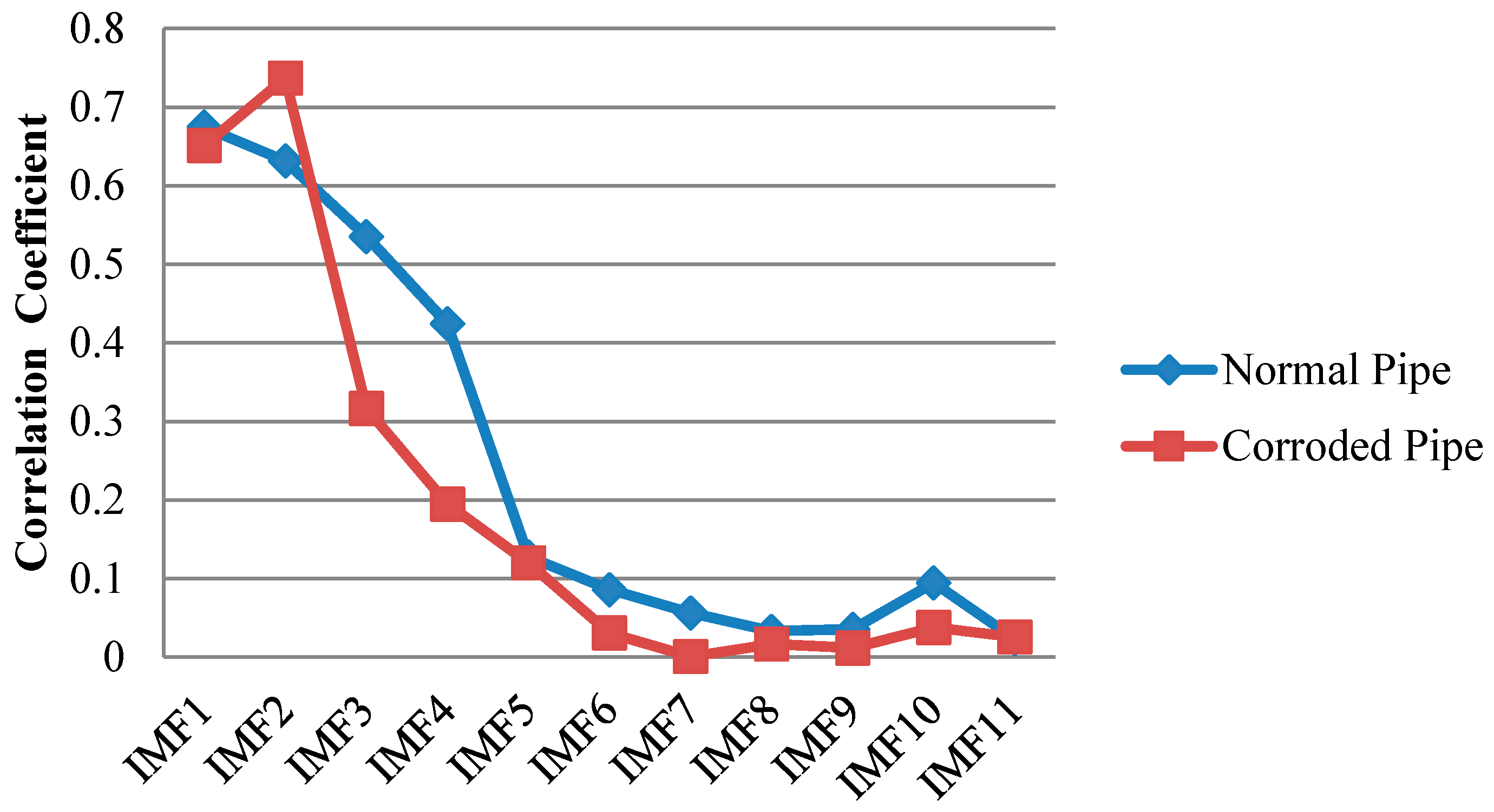
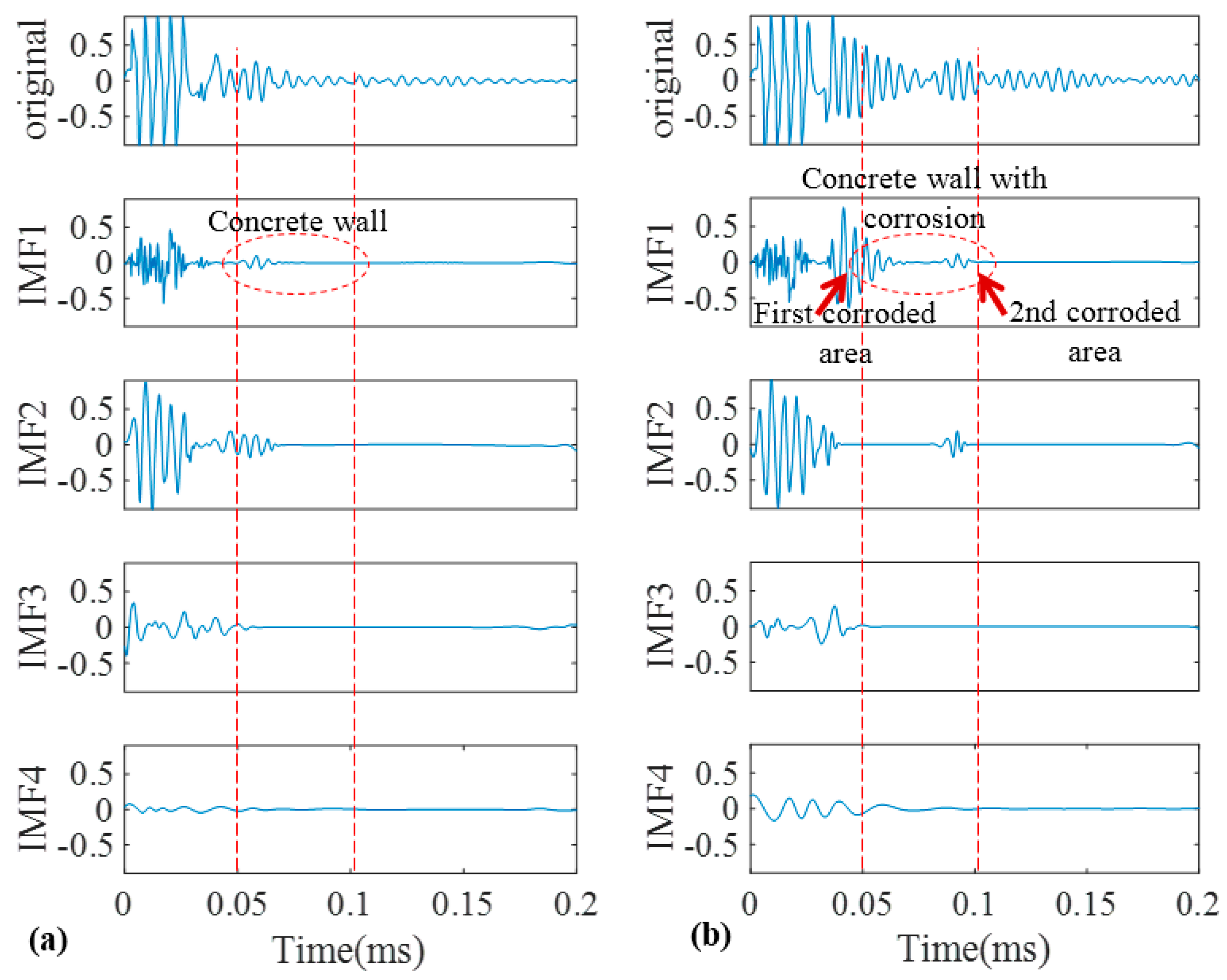
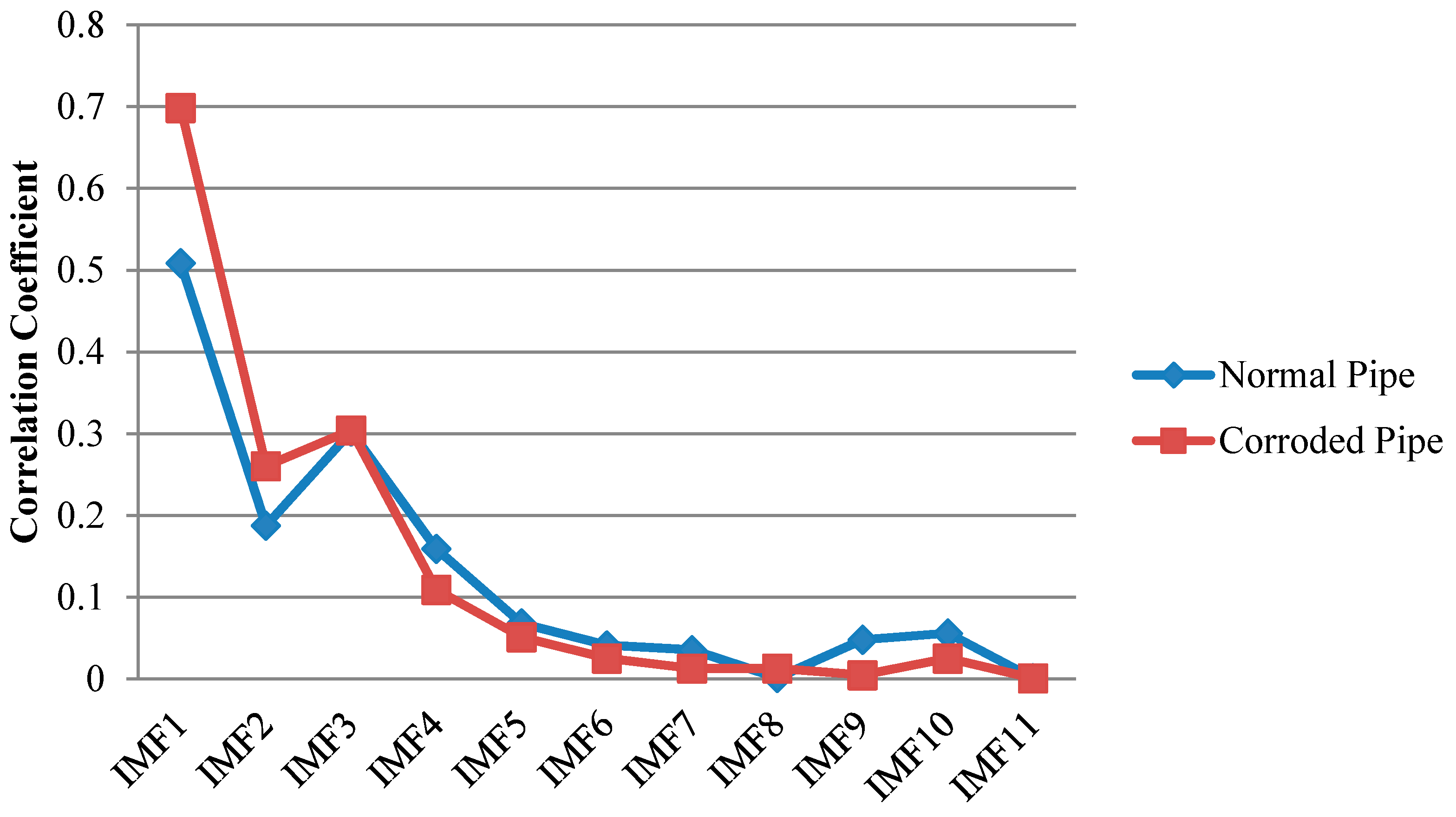
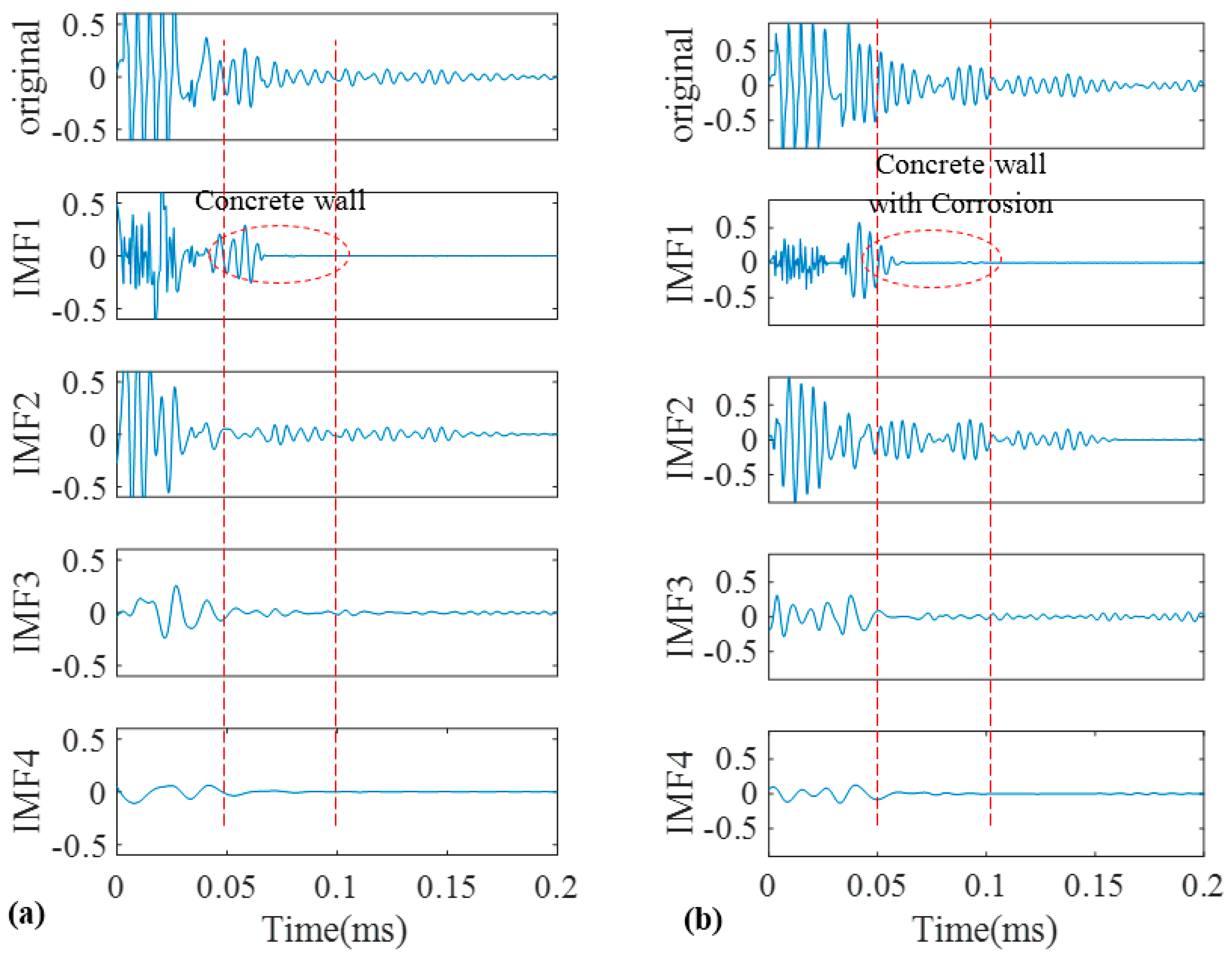
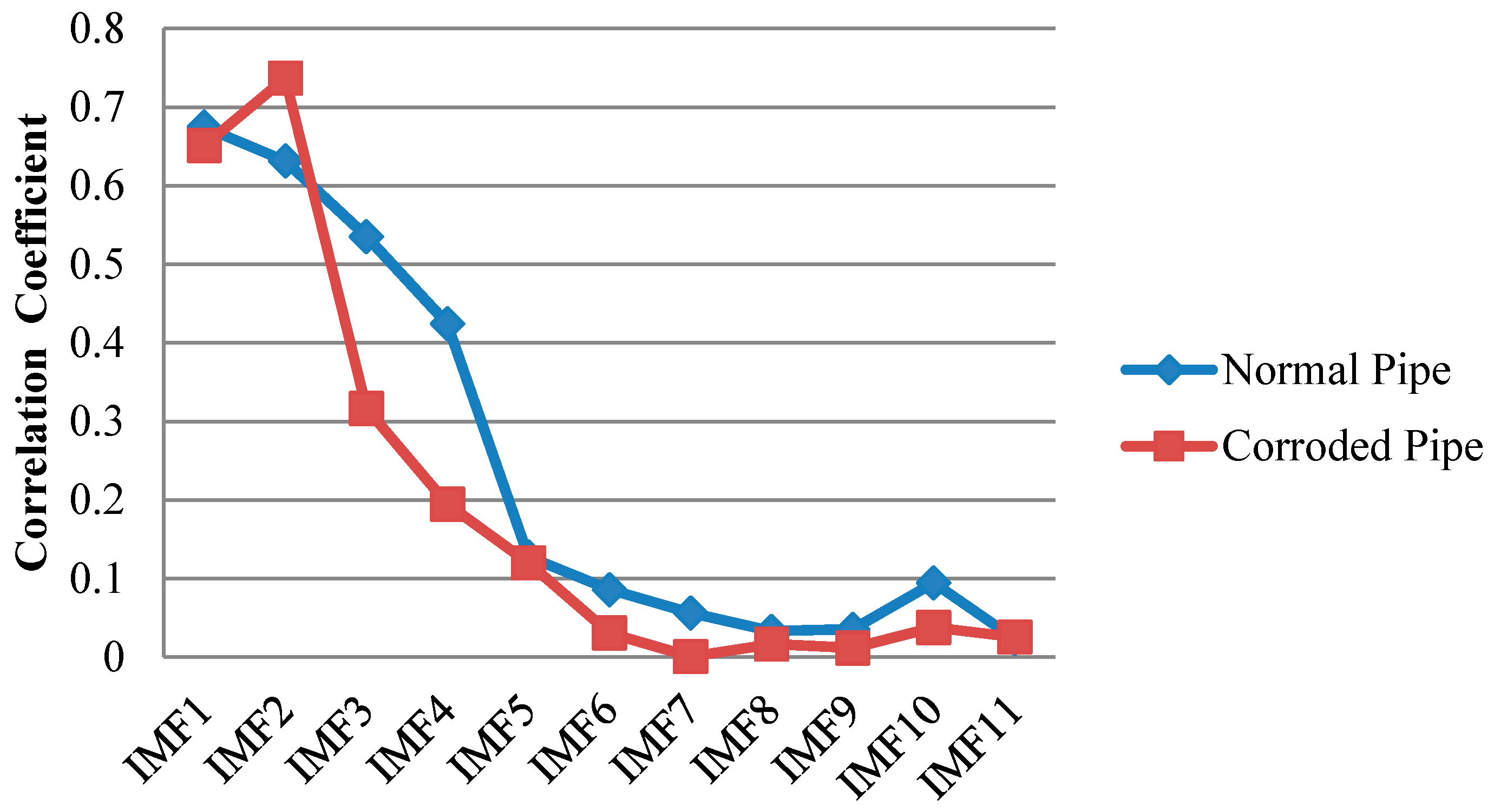
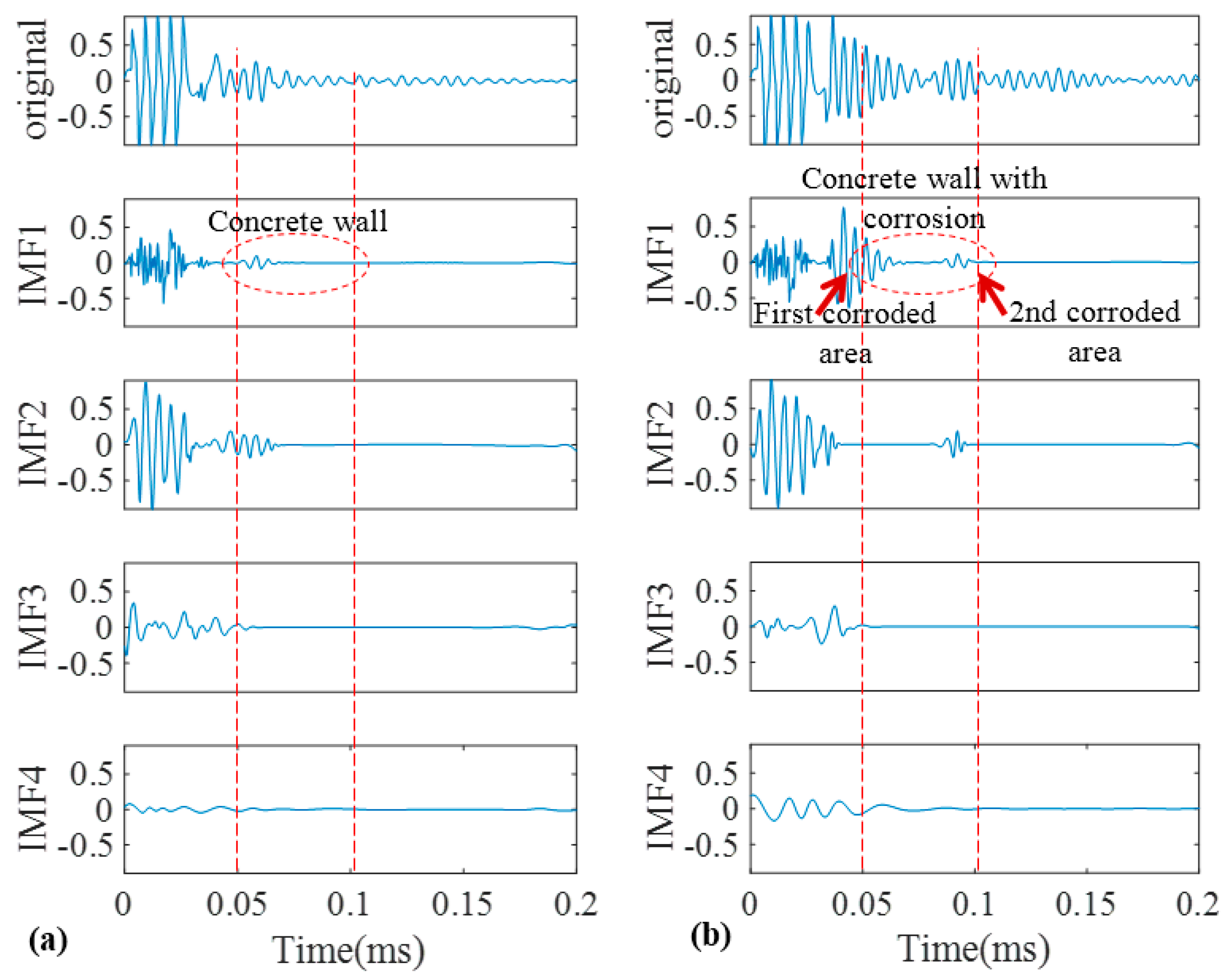
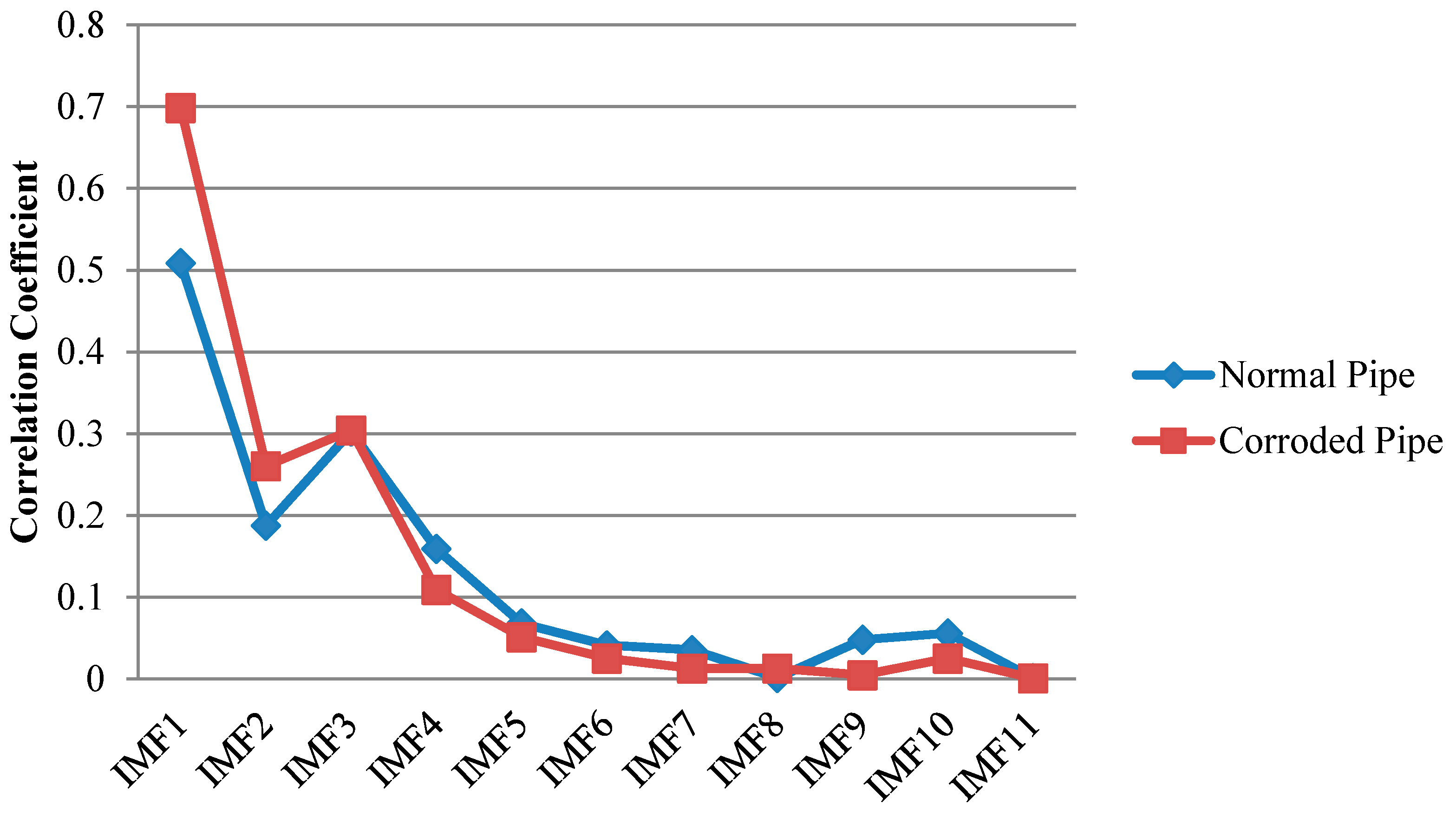
5.2. Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, H.W.; Lee, H.J.; Kim, Y.Y. Health monitoring of axially-cracked pipes by using helically propagating shear-horizontal waves. NDT E Int. 2012, 46, 115–121. [Google Scholar] [CrossRef]
- Ma, S.; Wu, Z.; Wang, Y.; Liu, K. The reflection of guided waves from simple dents in pipes. Ultrasonics 2014, 57, 190–197. [Google Scholar] [CrossRef] [PubMed]
- Huthwaite, P.; Ribichini, R.; Cawley, P.; Lowe, M.J.S. Mode selection for corrosion detection in pipes and vessels via guided wave tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1165–1177. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Tse, P.W.; Dordjevich, A. Evaluation of pipeline defect’s characteristic axial length via model-based parameter estimation in ultrasonic guided wave-based inspection. Meas. Sci. Technol. 2011, 22, 25701. [Google Scholar] [CrossRef]
- Bause, F.; Gravenkamp, H.; Rautenberg, J.; Henning, B. Transient modeling of ultrasonic guided waves in circular viscoelastic waveguides for inverse material characterization. Meas. Sci. Technol. 2015, 26, 95602. [Google Scholar] [CrossRef]
- Sun, F.; Sun, Z.; Chen, Q.; Murayama, R.; Nishino, H. Mode Conversion Behavior of Guided Wave in a Pipe Inspection System Based on a Long Waveguide. Sensors 2016, 16, 1737. [Google Scholar] [CrossRef] [PubMed]
- Lowe, M.J.S.; Cawley, P. Long Range Guided Wave Inspection Usage—Current Commercial Capabilities and Research Directions; Department of Mechanical Engineering, Imperial College London: London, UK, 2006. [Google Scholar]
- Kwun, H.; Kim, S.; Choi, M.; Walker, S. Torsional guided-wave attenuation in coal-tar-enamel-coated, buried piping. NDT E Int. 2004, 37, 663–665. [Google Scholar] [CrossRef]
- Barshinger, J.N.; Rose, J.L. Guided wave propagation in an elastic hollow cylinder coated with a viscoelastic material. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1547–1556. [Google Scholar] [CrossRef] [PubMed]
- Predoi, M.V. Guided waves dispersion equations for orthotropic multilayered pipes solved using standard finite elements code. Ultrasonics 2014, 54, 1825–1831. [Google Scholar] [CrossRef] [PubMed]
- Leinov, E.; Lowe, M.J.S.; Cawley, P. Investigation of guided wave propagation and attenuation in pipe buried in sand. J. Sound Vib. 2015, 347, 96–114. [Google Scholar] [CrossRef]
- Leinov, E.; Lowe, M.J.S.; Cawley, P. Ultrasonic isolation of buried pipes. J. Sound Vib. 2016, 363, 225–239. [Google Scholar] [CrossRef]
- Miller, T.H.; Kundu, T.; Huang, J.; Grill, J.Y. A new guided wave-based technique for corrosion monitoring in reinforced concrete. Struct. Heal. Monit. 2012, 12, 35–47. [Google Scholar] [CrossRef]
- Lu, Y.; Li, J.; Ye, L.; Wang, D. Guided waves for damage detection in rebar-reinforced concrete beams. Constr. Build. Mater. 2013, 47, 370–378. [Google Scholar] [CrossRef]
- Sanderson, R. A closed form solution method for rapid calculation of guided wave dispersion curves for pipes. Wave Motion 2015, 53, 40–50. [Google Scholar] [CrossRef]
- Raišutis, R.; Kažys, R.; Žukauskas, E.; Mažeika, L.; Vladišauskas, A. Application of ultrasonic guided waves for non-destructive testing of defective CFRP rods with multiple delaminations. NDT E Int. 2010, 43, 416–424. [Google Scholar] [CrossRef]
- Xu, K.; Ta, D.; Cassereau, D.; Hu, B.; Wang, W.; Laugier, P.; Minonzio, J.-G. Multichannel processing for dispersion curves extraction of ultrasonic axial-transmission signals: Comparisons and case studies. J. Acoust. Soc. Am. 2016, 140, 1758–1770. [Google Scholar] [CrossRef] [PubMed]
- Kwun, H.; Kim, S.-Y.; Crane, J. Method and Apparatus Generating and Detecting Torsional Wave Inspection of Pipes or Tubes. U.S. Patent 6,429,650, 6 August 2002. [Google Scholar]
- Liu, Z.; Fan, J.; Hu, Y.; He, C.; Wu, B. Torsional mode magnetostrictive patch transducer array employing a modified planar solenoid array coil for pipe inspection. NDT E Int. 2015, 69, 9–15. [Google Scholar] [CrossRef]
- Kim, H.J.; Lee, J.S.; Kim, H.W.; Lee, H.S.; Kim, Y.Y. Numerical simulation of guided waves using equivalent source model of magnetostrictive patch transducers. Smart Mater. Struct. 2015, 24, 015006. [Google Scholar]
- Tse, P.W.; Liu, X.C.; Liu, Z.H.; Wu, B.; He, C.F.; Wang, X.J. An innovative design for using flexible printed coils for magnetostrictive-based longitudinal guided wave sensors in steel strand inspection. Smart Mater. Struct. 2011, 20, 055001. [Google Scholar] [CrossRef]
- Kwun, H.; Teller, C.M. Nondestructive Evaluation of Pipes and Tubes Using Magnetostrictive Sensors. U.S. Patent 5,581,037, 3 December 1996. [Google Scholar]
- Vinogradov, S. Method and System for the Generation of Torsional Guided Waves Using a Ferromagnetic Strip Sensor. U.S. Patent 7,573,261 B1, 11 August 2009. [Google Scholar]
- De Marchi, L.; Ruzzene, M.; Xu, B.; Baravelli, E.; Marzani, A.; Speciale, N. Warped Frequency Transform for Damage Detection Using Lamb Waves. Proc. SPIE 2002, 76500F. [Google Scholar] [CrossRef]
- Hong, J.-C.; Sun, K.H.; Kim, Y.Y. Dispersion-based short-time Fourier transform applied to dispersive wave analysis. J. Acoust. Soc. Am. 2005, 117, 2949. [Google Scholar] [CrossRef] [PubMed]
- Touzé, G.L.; Nicolas, B.; Mars, J.I. Matched Representations and Filters for Guided Waves. IEEE Trans. Signal Process. 2009, 57, 1783–1795. [Google Scholar] [CrossRef]
- Chen, J.; Su, Z.; Cheng, L. Identification of corrosion damage in submerged structures using fundamental anti-symmetric Lamb waves. Smart Mater. Struct. 2010, 19, 015004. [Google Scholar] [CrossRef]
- Tse, P.W.; Wang, X. Characterization of pipeline defect in guided-waves based inspection through matching pursuit with the optimized dictionary. NDT E Int. 2013, 54, 171–182. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C.E.S. Guided-wave signal processing using chirplet matching pursuits and mode correlation for structural health monitoring. Smart Mater. Struct. 2007, 16, 355–366. [Google Scholar] [CrossRef]
- Kim, C.-Y.; Park, K.-J. Mode separation and characterization of torsional guided wave signals reflected from defects using chirplet transform. NDT E Int. 2015, 74, 15–23. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, S.S. Hilbert-Huang Transform and Its Applications; World Scientific: Hackensack, NJ, USA, 2005; Volume 5. [Google Scholar]
- Rato, R.T.; Ortigueira, M.D.; Batista, A.G. On the HHT, its problems, and some solutions. Mech. Syst. Signal Process. 2008, 22, 1374–1394. [Google Scholar] [CrossRef]
- Chen, G.; Wang, Z. A signal decomposition theorem with Hilbert transform and its application to narrowband time series with closely spaced frequency components. Mech. Syst. Signal Process. 2012, 28, 258–279. [Google Scholar] [CrossRef]
- Xun, J.; Yan, S. A revised Hilbert-Huang transformation based on the neural networks and its application in vibration signal analysis of a deployable structure. Mech. Syst. Signal Process. 2008, 22, 1705–1723. [Google Scholar] [CrossRef]
- Cheng, J.; Yu, D.; Yang, Y. Application of support vector regression machines to the processing of end effects of Hilbert–Huang transform. Mech. Syst. Signal Process. 2007, 21, 1197–1211. [Google Scholar] [CrossRef]
- Roy, A.; Doherty, J.F. Improved signal analysis performance at low sampling rates using raised cosine empirical mode decomposition. Electron. Lett. 2010, 46, 176–177. [Google Scholar] [CrossRef]
- Yan, J.; Lu, L. Improved Hilbert-Huang transform based weak signal detection methodology and its application on incipient fault diagnosis and ECG signal analysis. Signal Process. 2014, 98, 74–87. [Google Scholar] [CrossRef]
- Farhidzadeh, A.; Salamone, S. Reference-free corrosion damage diagnosis in steel strands using guided ultrasonic waves. Ultrasonics 2015, 57, 198–208. [Google Scholar] [CrossRef] [PubMed]
- Labate, D.; Foresta, F.; Occhiuto, G.; Morabito, F.C.; Lay-Ekuakille, A.; Vergallo, P. Empirical mode decomposition vs. wavelet decomposition for the extraction of respiratory signal from single-channel ECG: A comparison. IEEE Sens. J. 2013, 13, 2666–2674. [Google Scholar] [CrossRef]
- Abbate, A.; Koay, J.; Frankel, J.; Schroeder, S.C.; Das, P. Signal detection and noise suppression using a wavelet transform signal processor: Application to ultrasonic flaw detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 14–26. [Google Scholar] [CrossRef] [PubMed]
- Siqueira, M.H.; Gatts, C.E.; Da Silva, R.R.; Rebello, J.M. The use of ultrasonic guided waves and wavelets analysis in pipe inspection. Ultrasonics 2004, 41, 785–797. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Guo, W.; Tse, P.W.; Djordjevich, A. Faulty bearing signal recovery from large noise using a hybrid method based on spectral kurtosis and ensemble empirical mode decomposition. Meas. J. Int. Meas. Conf. 2012, 45, 1308–1322. [Google Scholar] [CrossRef]
- Pao, S.-H.; Young, C.-N.; Tseng, C.-L.; Huang, N.E. Smoothing Empirical Mode Decomposition: A Patch to Improve the Decomposed Accuracy. Adv. Adapt. Data Anal. 2010, 2, 521–543. [Google Scholar] [CrossRef]
- Faltermeier, R.; Zeiler, A.; Keck, I.R.; Tomé, A.M.; Brawanski, A.; Lang, E.W. Sliding Empirical Mode Decomposition. In Proceedings of the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; pp. 1–8.
- Faltermeier, R.; Zeiler, A.; Tomé, A.M.; Brawanski, A.; Lang, E.W. Weighted Sliding Empirical Mode Decomposition. Adv. Adapt. Data Anal. 2011, 3, 509–526. [Google Scholar] [CrossRef]
- Kim, D.; Kim, K.O.; Oh, H.-S. Extending the scope of empirical mode decomposition by smoothing. EURASIP J. Adv. Signal Process. 2012, 2012, 168. [Google Scholar] [CrossRef]
- Seco, F.; Martín, J.M.; Jiménez, A.; Pons, J.L. PCDISP: A Tool for the Simulation of Wave Propagation in Cylindrical Waveguides. In Proceedings of the Ninth International Congress on Sound and Vibration, Orlando, FL, USA, 8–11 July 2002.
- Seco, F.; Jiménez, A. Modelling the Generation and Propagation of Ultrasonic Signals in Cylindrical Waveguides. Ultrason. Waves 2012. Available online: http://cdn.intechopen.com/pdfs/31676/InTech-Modelling_the_generation_and_propagation_of_ultrasonic_signals_in_cylindrical_waveguides.pdf (accessed on 6 February 2016). [Google Scholar]
- Wang, X. Quantitative Characterization of Defect in Ultrasonic Guided Waves-Based Pipeline Inspection; City University of Hong Kong: Hong Kong, China, 2011. [Google Scholar]
- Wan, X.; Xu, G.; Zhang, Q.; Tse, P.W.; Tan, H. A quantitative method for evaluating numerical simulation accuracy of time-transient Lamb wave propagation with its applications to selecting appropriate element size and time step. Ultrasonics 2016, 64, 25–42. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Ye, L.; Su, Z.; Lu, Y.; Li, F.; Meng, G. Probabilistic Damage Identification Based on Correlation Analysis Using Guided Wave Signals in Aluminum Plates. Struct. Heal. Monit. 2010, 9, 133–144. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group Velocity 5100 (m/s) | Time of Flight (ms) | ||
|---|---|---|---|
| t1 (Start of Concrete Wall) | t2 (End of Concrete Wall) | t4 (Pipe End) | |
| Normal Pipe | 0.15 | 0.23 | 0.31 |
| Pipe with Corrosion | 0.18 | 0.26 | 0.31 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rostami, J.; Chen, J.; Tse, P.W. A Signal Processing Approach with a Smooth Empirical Mode Decomposition to Reveal Hidden Trace of Corrosion in Highly Contaminated Guided Wave Signals for Concrete-Covered Pipes. Sensors 2017, 17, 302. https://doi.org/10.3390/s17020302
Rostami J, Chen J, Tse PW. A Signal Processing Approach with a Smooth Empirical Mode Decomposition to Reveal Hidden Trace of Corrosion in Highly Contaminated Guided Wave Signals for Concrete-Covered Pipes. Sensors. 2017; 17(2):302. https://doi.org/10.3390/s17020302
Chicago/Turabian StyleRostami, Javad, Jingming Chen, and Peter W. Tse. 2017. "A Signal Processing Approach with a Smooth Empirical Mode Decomposition to Reveal Hidden Trace of Corrosion in Highly Contaminated Guided Wave Signals for Concrete-Covered Pipes" Sensors 17, no. 2: 302. https://doi.org/10.3390/s17020302