High-Accuracy Readout Electronics for Piezoresistive Tactile Sensors

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
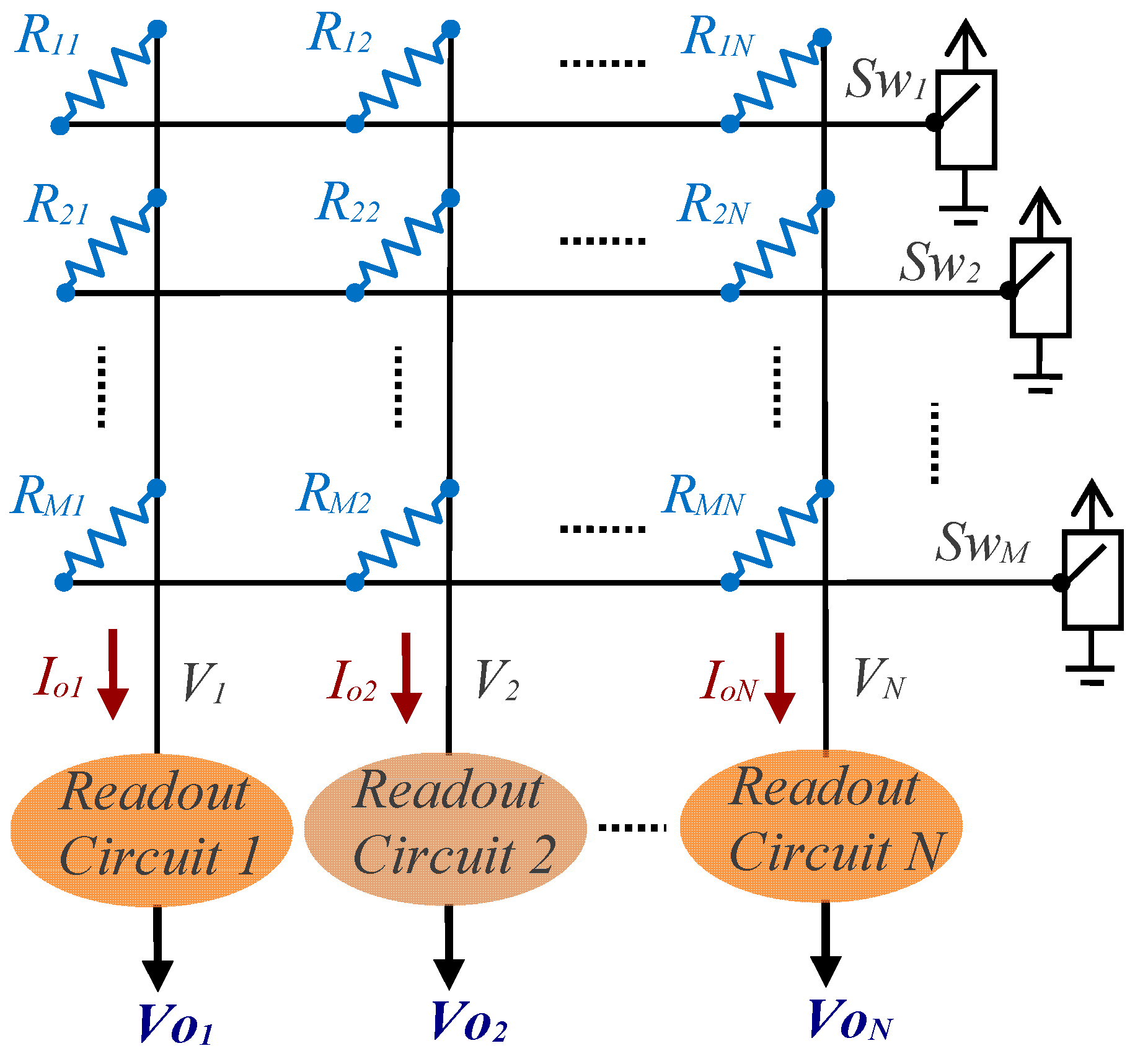
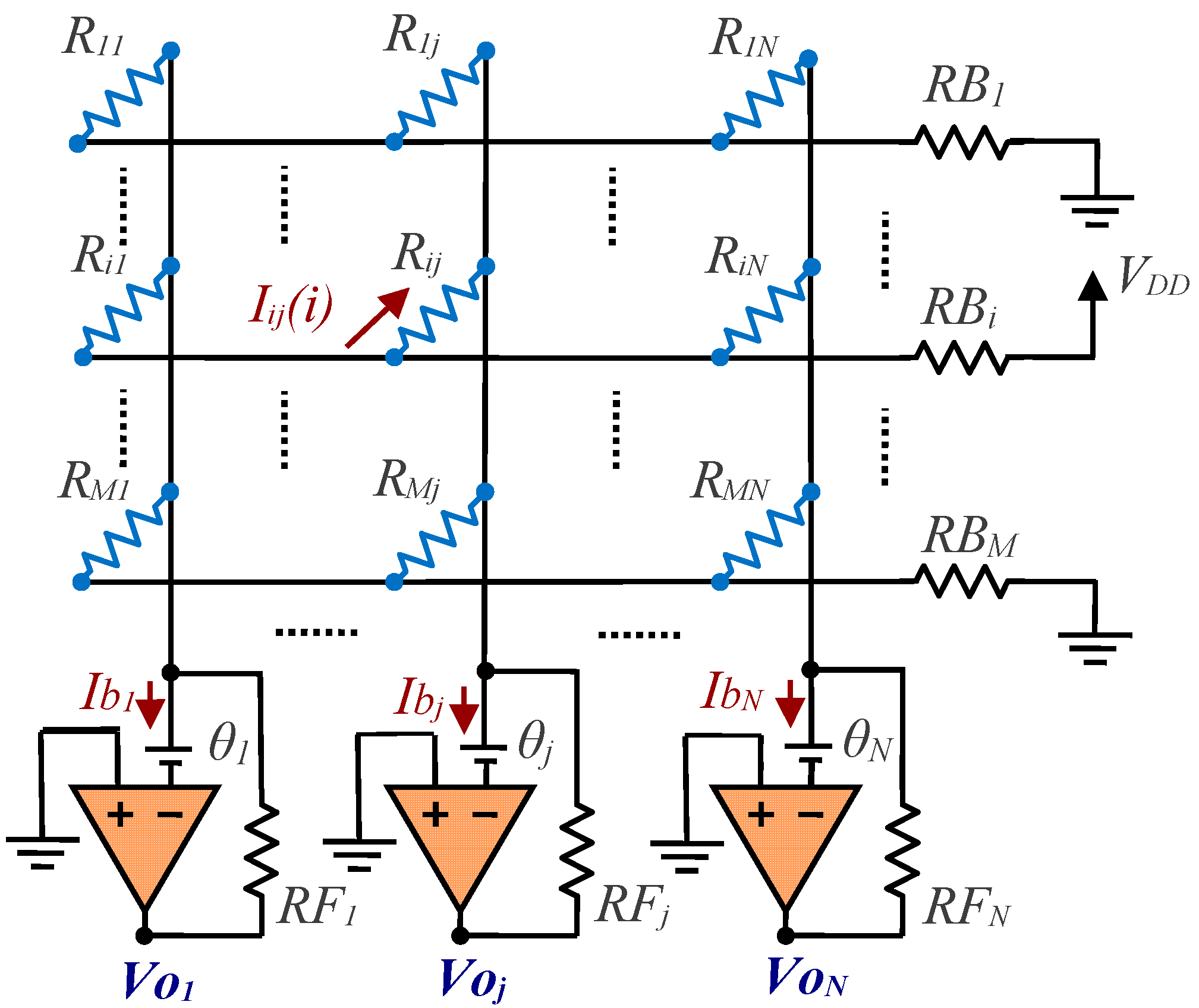
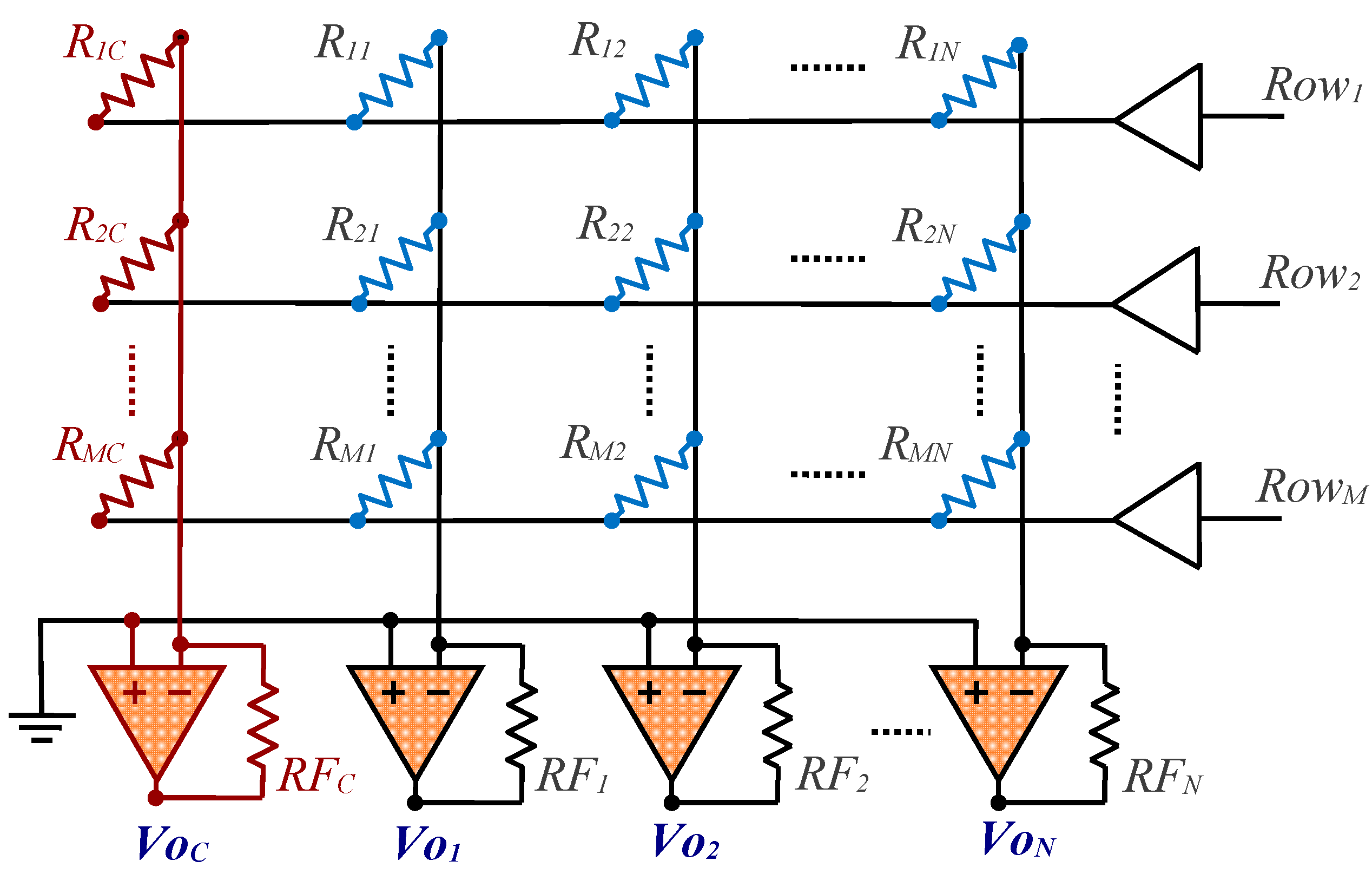
2. Electronic Reading Circuits
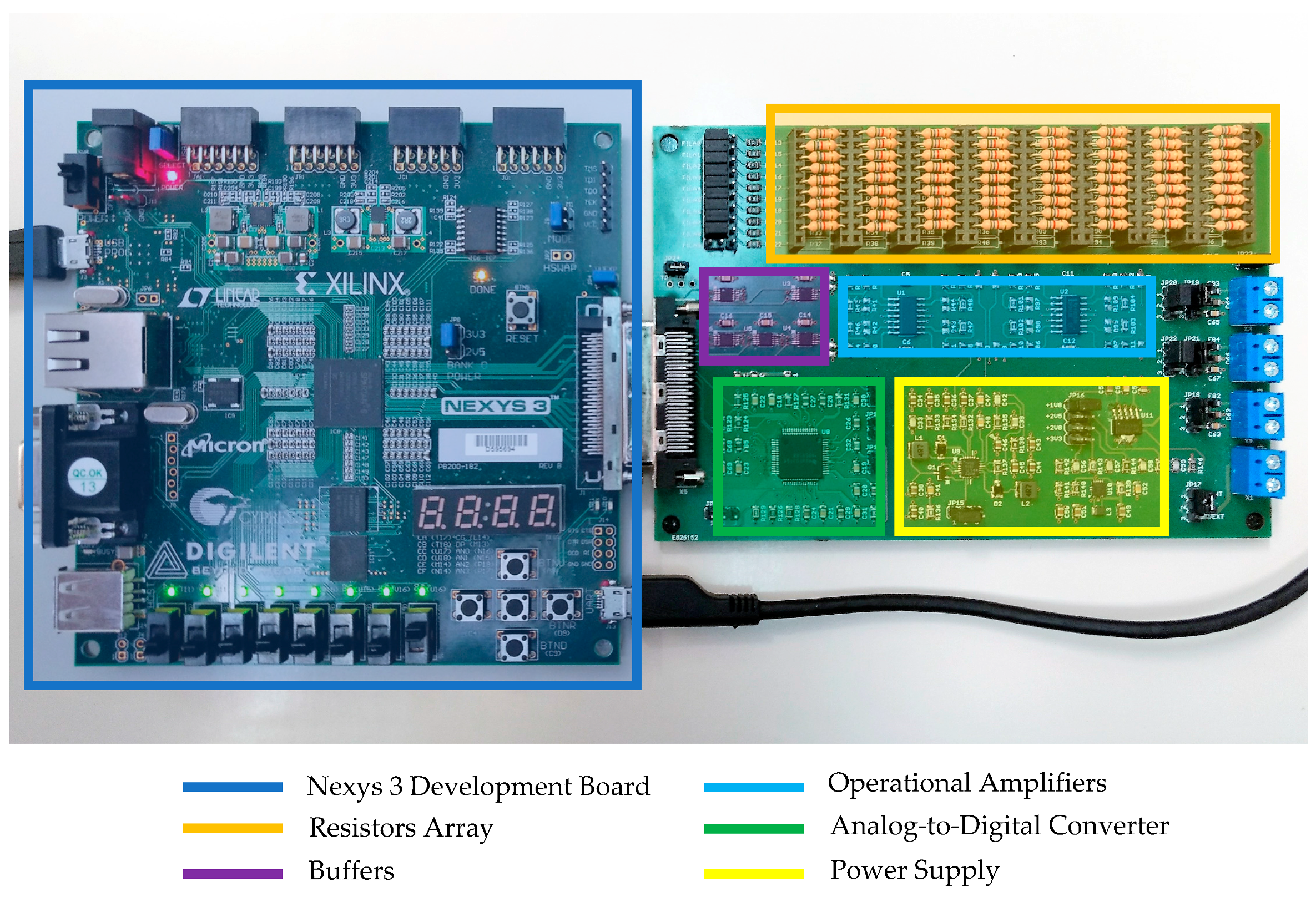
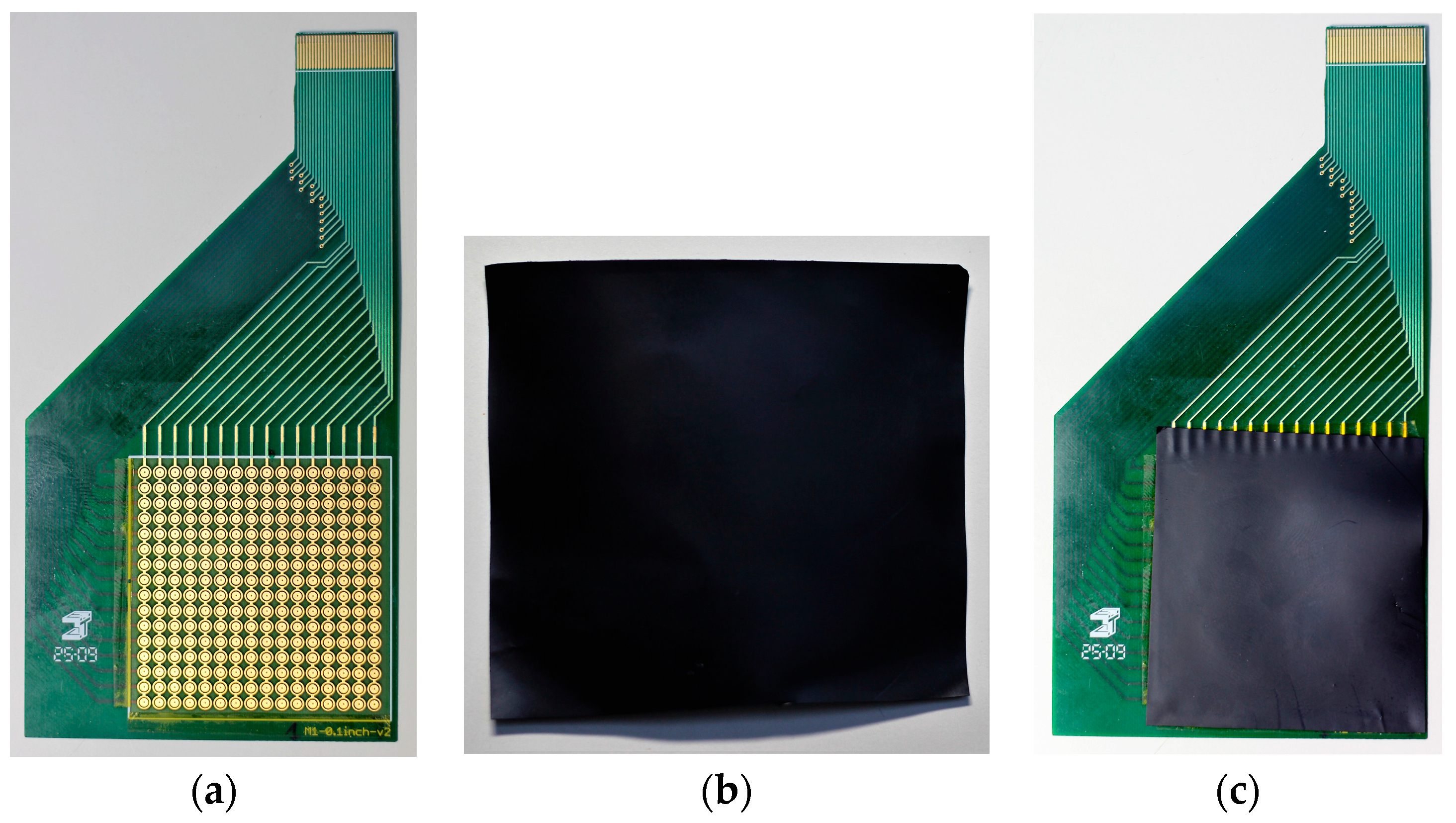
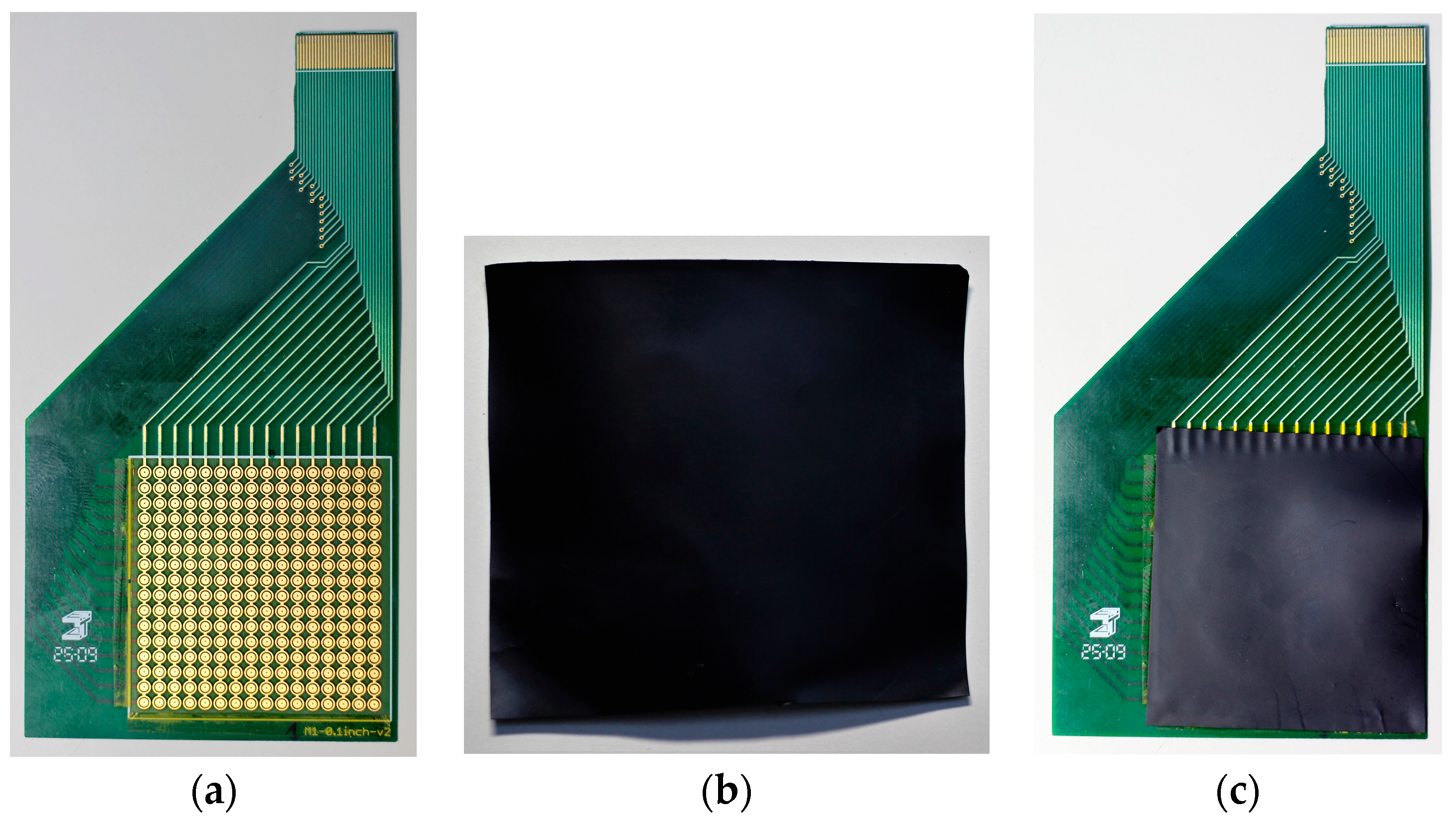
3. Materials and Methods
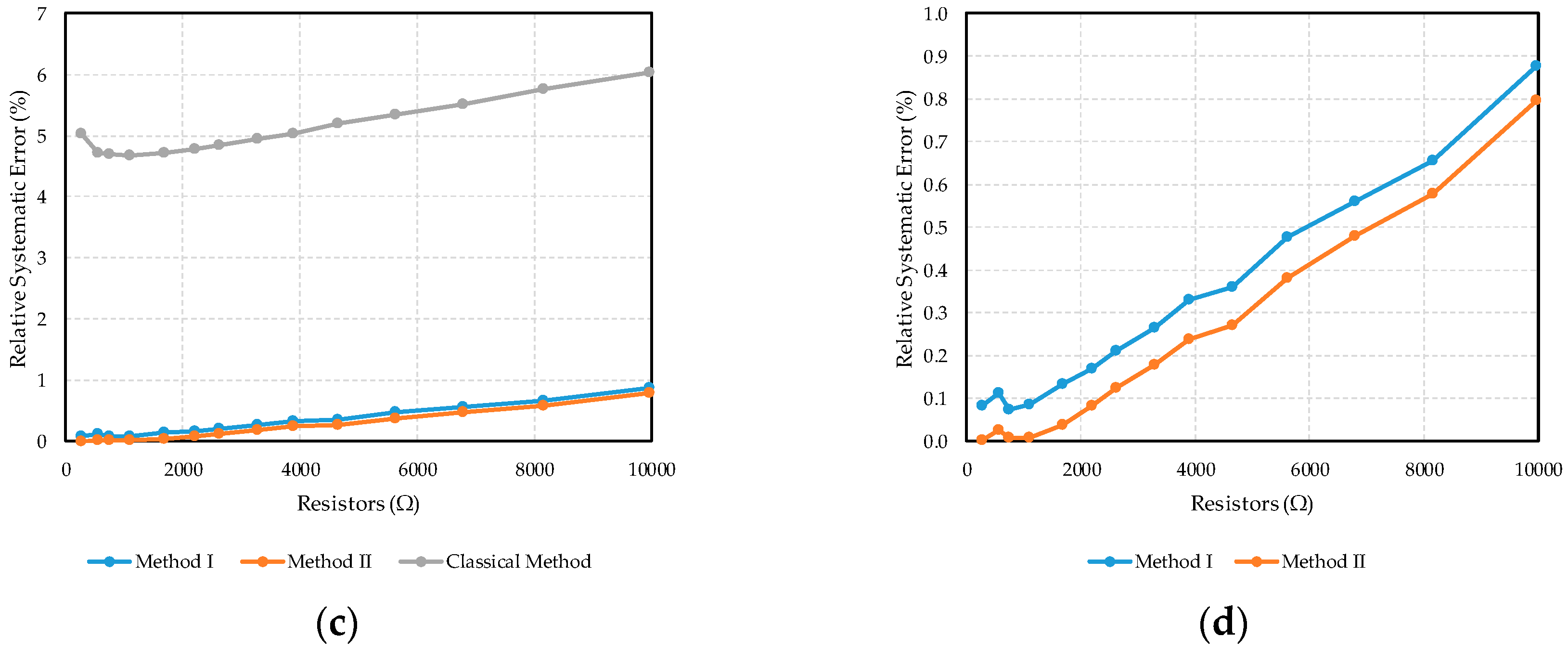
4. Results
4.1. Experiment 1
4.2. Experiment 2
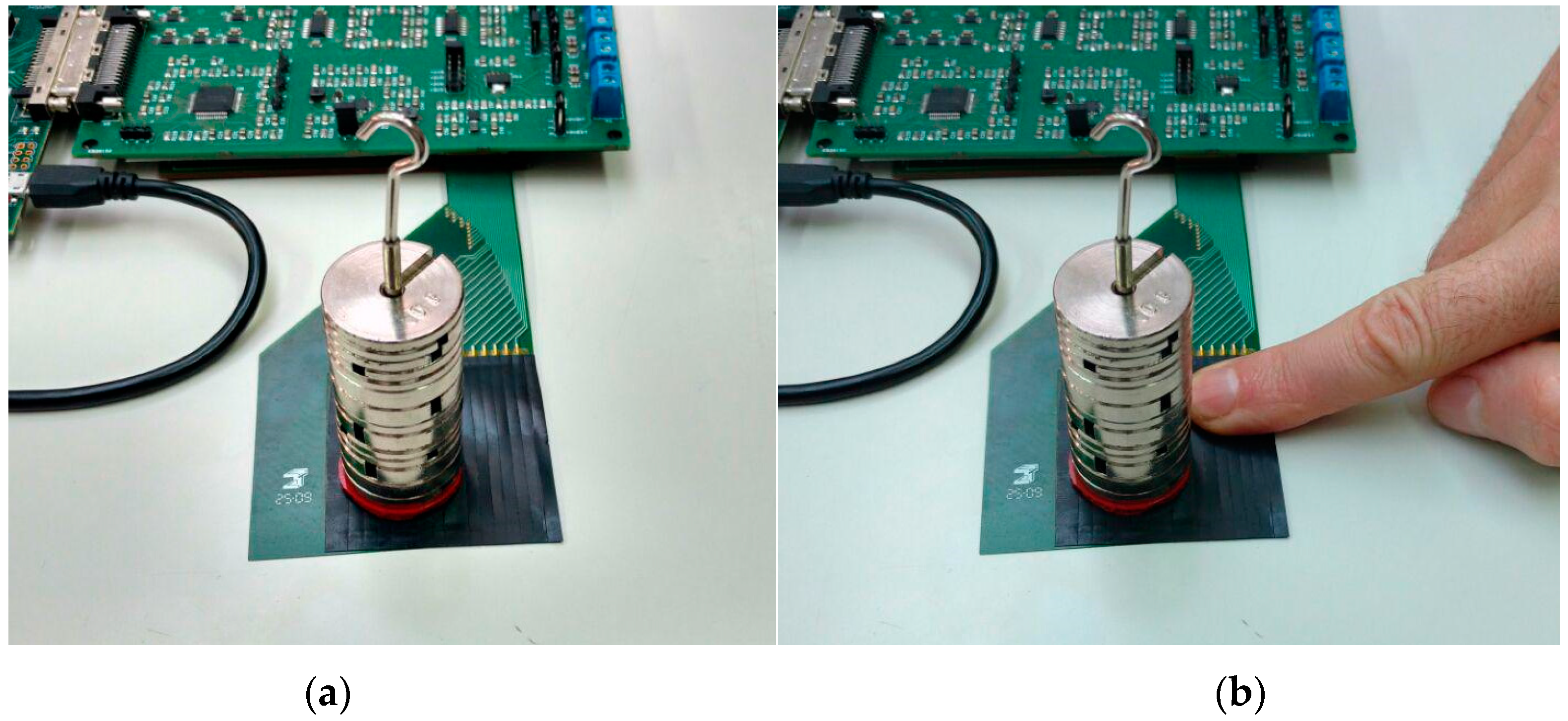
4.3. Experiment 3
5. Discussion
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Saxena, R.S.; Bhan, R.K.; Aggrawal, A. A new discrete circuit for readout of resistive sensor arrays. Sens. Actuators A Phys. 2009, 149, 93–99. [Google Scholar] [CrossRef]
- Xiao-Yuan, W.; Fitch, A.L.; Iu, H.H.C.; Sreeram, V.; Wei-Gui, Q. Implementation of an analogue model of a memristor based on a light-dependent resistor. Chin. Phys. B 2012, 21, 108501. [Google Scholar] [CrossRef]
- Fratoddi, I.; Venditti, I.; Cametti, C.; Russo, M.V. Chemiresistive polyaniline-based gas sensors: A mini review. Sens. Actuators B Chem. 2015, 220, 534–548. [Google Scholar] [CrossRef]
- Wang, J.; Chan, S.; Carlson, R.R.; Luo, Y.; Ge, G.; Ries, R.S.; Heath, J.R.; Tseng, H.-R. Electrochemically fabricated polyaniline nanoframework electrode junctions that function as resistive sensors. Nano Lett. 2004, 4, 1693–1697. [Google Scholar] [CrossRef]
- Depari, A.; Falasconi, M.; Flammini, A.; Marioli, D.; Rosa, S.; Sberveglieri, G.; Taroni, A. A new low-cost electronic system to manage resistive sensors for gas detection. IEEE Sens. J. 2007, 7, 1073–1077. [Google Scholar] [CrossRef]
- Wu, J.F.; Wang, L.; Li, J.Q.; Yu, Z.Z. A small size device using temperature sensor array. Chin. J. Sens. Actuators 2011, 24, 1649–1652. [Google Scholar]
- Yang, Y.-J.; Cheng, M.-Y.; Shih, S.-C.; Huang, X.-H.; Tsao, C.-M.; Chang, F.-Y.; Fan, K.-C. A 32 × 32 temperature and tactile sensing array using PI-copper films. Int. J. Adv. Manuf. Technol. 2010, 46, 945–956. [Google Scholar] [CrossRef]
- Arlit, M.; Schleicher, E.; Hampel, U. Thermal Anemometry Grid Sensor. Sensors 2017, 17, 1663. [Google Scholar] [CrossRef] [PubMed]
- Snyder, W.E.; Clair, J.S. Conductive elastomers as sensor for industrial parts handling equipment. IEEE Trans. Instrum. Meas. 1978, 27, 94–99. [Google Scholar] [CrossRef]
- Kane, B.J.; Cutkosky, M.R.; Kovacs, G.T.A. A traction stress sensor array for use in high-resolution robotic tactile imaging. J. Microelectromech. Syst. 2000, 9, 425–434. [Google Scholar] [CrossRef]
- Vidal-Verdú, F.; Oballe-Peinado, Ó.; Sánchez-Durán, J.A.; Castellanos-Ramos, J.; Navas-González, R. Three Realizations and Comparison of Hardware for Piezoresistive Tactile Sensors. Sensors 2011, 11, 3249–3266. [Google Scholar] [CrossRef] [PubMed]
- Shu, L.; Tao, X.; Feng, D.D. A new approach for readout of resistive sensor arrays for wearable electronic applications. IEEE Sens. J. 2015, 15, 442–452. [Google Scholar]
- Speeter, T.H. Flexible, piezoresitive touch sensing array. Opt. Illum. Imaging Sens. Mach. Vis. III SPIE 1988, 1005, 31–43. [Google Scholar]
- Vidal-Verdú, F.; Barquero, M.J.; Castellanos-Ramos, J.; Navas-González, R.; Sánchez, J.A.; Serón, J.; García-Cerezo, A. A large area tactile sensor patch based on commercial force sensors. Sensors 2011, 11, 5489–5507. [Google Scholar] [CrossRef] [PubMed]
- Castellanos-Ramos, J.; Navas-González, R.; Macicior, H.; Sikora, T.; Ochoteco, E.; Vidal-Verdú, F. Tactile sensors based on conductive polymers. Microsyst. Technol. 2010, 16, 765–776. [Google Scholar] [CrossRef]
- Shimojo, M.; Namiki, A.; Ishikawa, M. A tactile sensor sheet using pressure conductive rubber with electrical-wires stitched method. IEEE Sens. 2004, 4, 589–596. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, A.X.; Wang, Y.; Chyu, M.K.; Wang, Q.-M. Fabrication and characterization of carbon nanotube–polyimide composite based high temperature flexible thin film piezoresistive strain sensor. Sens. Actuators A Phys. 2013, 199, 265–271. [Google Scholar] [CrossRef]
- Cheng, M.-Y.; Tsao, C.-M.; Lai, Y.-Z.; Yang, Y.-J. The development of a highly twistable tactile sensing array with stretchable helical electrodes. Sens. Actuators A Phys. 2011, 166, 226–233. [Google Scholar] [CrossRef]
- Luo, Y.; Xiao, Q.; Li, B. A Stretchable Pressure-Sensitive Array Based on Polymer Matrix. Sensors 2017, 17, 1571. [Google Scholar] [CrossRef]
- Saxena, R.S.; Bhan, R.K.; Saini, N.K.; Muralidharan, R. Virtual ground technique for crosstalk suppression in networked resistive sensors. IEEE Sens. J. 2011, 11, 432–433. [Google Scholar] [CrossRef]
- Yarahmadi, R.; Safarpour, A.; Lotfi, R. An improved-accuracy approach for readout of large-array resistive sensors. IEEE Sens. J. 2016, 16, 210–215. [Google Scholar] [CrossRef]
- Wu, J.; Wang, L. Cable crosstalk suppression in resistive sensor array with 2-wire S-NSDE-EP method. J. Sens. 2016, 2016, 8051945. [Google Scholar] [CrossRef]
- Kim, J.S.; Kwon, D.Y.; Choi, B.D. High-accuracy, compact scanning method and circuit for resistive sensor arrays. Sensors 2016, 16, 155. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Wang, Y.; Li, J.; Song, A. A Novel Two-Wire Fast Readout Approach for Suppressing Cable Crosstalk in a Tactile Resistive Sensor Array. Sensors 2016, 16, 720. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Li, J. Approximate model of zero potential circuits for the 2-D networked resistive sensor array. IEEE Sens. J. 2016, 16, 3084–3090. [Google Scholar] [CrossRef]
- Wu, J.; Wang, L.; Li, J. VF-NSE method measurement error analysis of networked resistive sensor array. Sens. Actuators A Phys. 2014, 211, 45–50. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y.-F.; Liu, Y.-W.; Jin, M.-H. Measurement errors in the scanning of resistive sensor arrays. Sens. Actuators A Phys. 2010, 163, 198–204. [Google Scholar] [CrossRef]
- Saxena, R.S.; Saini, N.K.; Bhan, R.K. Analysis of crosstalk in networked arrays of resistive sensors. IEEE Sens. J. 2011, 11, 920–924. [Google Scholar] [CrossRef]
- Wu, J.-F.; Wang, F.; Wang, Q.; Li, J.-Q.; Song, A.-G. An Improved Zero Potential Circuit for Readout of a Two-Dimensional Resistive Sensor Array. Sensors 2016, 16, 2070. [Google Scholar] [CrossRef] [PubMed]
- Hidalgo-López, J.A.; Romero-Sánchez, J.; Fernández-Ramos, R. New Approaches for Increasing Accuracy in Readout of Resistive Sensor Arrays. IEEE Sens. J. 2017, 17, 2154–2164. [Google Scholar] [CrossRef]
- ADS8568 16-Bit, 8-Channel, Simultaneous-Sampling, Bipolar-Input SAR ADC|TI.com. Available online: http://www.ti.com/product/ADS8568 (accessed on 20 September 2017).
- TS5A23159 1-Ohm 5-V/3.3-V 2-Channel SPDT Switch|TI.com. Available online: http://www.ti.com/product/ts5a23159?keyMatch=ts5a23159&tisearch=Search-EN-Everything (accessed on 20 September 2017).
- OPA4188 0.03 µV/C, Low Noise, Rail-to-Rail Output, 36 V Zero-Drift Operational Amplifier|TI.com. Available online: http://www.ti.com/product/opa4188/description?keyMatch=opa4188&tisearch=Search-EN-Everything (accessed on 20 September 2017).
- Nexys 3 Spartan-6 FPGA Trainer Board—Digilent. Available online: http://store.digilentinc.com/nexys-3-spartan-6-fpga-trainer-board-limited-time-see-nexys4-ddr/ (accessed on 22 September 2017).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resistor (Ω) | σ (Ω) | Max. Rel. Error (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CM | M.I | M.II | CM | M.I | M.II | CM | M.I | M.II | CM | M.I | M.II | |
| 267.8 | 269.61 | 267.54 | 267.89 | 0.06 | 0.12 | 0.26 | 0.67 | 0.096 | 0.0325 | 0.73 | 0.31 | 0.31 |
| 556.2 | 558.69 | 555.50 | 556.12 | 0.20 | 0.22 | 0.55 | 0.45 | 0.125 | 0.0141 | 0.53 | 0.25 | 0.27 |
| 747.5 | 750.67 | 746.57 | 747.43 | 0.33 | 0.35 | 0.71 | 0.42 | 0.125 | 0.0090 | 0.53 | 0.26 | 0.26 |
| 1097.3 | 1102.42 | 1095.88 | 1097.30 | 0.65 | 0.43 | 1.11 | 0.47 | 0.129 | 0.0004 | 0.62 | 0.25 | 0.25 |
| 1685 | 1695.13 | 1683.07 | 1685.15 | 1.60 | 0.89 | 1.59 | 0.60 | 0.115 | 0.0088 | 0.80 | 0.33 | 0.25 |
| 2198.4 | 2214.83 | 2195.96 | 2198.79 | 2.61 | 1.24 | 2.12 | 0.75 | 0.111 | 0.0179 | 1.00 | 0.36 | 0.24 |
| 2616.1 | 2638.47 | 2613.25 | 2616.38 | 3.99 | 1.76 | 2.63 | 0.86 | 0.109 | 0.0108 | 1.32 | 0.36 | 0.31 |
| 3282.6 | 3317.65 | 3280.18 | 3284.01 | 5.97 | 2.74 | 3.47 | 1.07 | 0.074 | 0.0431 | 1.48 | 0.40 | 0.33 |
| 3883.2 | 3932.15 | 3880.20 | 3884.80 | 8.28 | 3.81 | 4.55 | 1.26 | 0.077 | 0.0412 | 1.73 | 0.39 | 0.44 |
| 4656.5 | 4726.44 | 4653.98 | 4659.65 | 12.05 | 5.83 | 6.20 | 1.50 | 0.054 | 0.0677 | 2.10 | 0.59 | 0.50 |
| 5621.4 | 5722.61 | 5618.29 | 5624.93 | 17.47 | 8.58 | 9.03 | 1.80 | 0.055 | 0.0628 | 2.50 | 1.04 | 1.21 |
| 6789.6 | 6940.56 | 6788.28 | 6796.44 | 26.86 | 13.42 | 13.49 | 2.22 | 0.019 | 0.1008 | 3.06 | 0.96 | 1.20 |
| 8170.5 | 8388.56 | 8173.12 | 8182.39 | 39.12 | 18.20 | 17.92 | 2.67 | 0.032 | 0.1456 | 4.33 | 1.21 | 1.41 |
| 9963.2 | 10,282.45 | 9955.25 | 9967.98 | 59.58 | 23.95 | 25.59 | 3.20 | 0.080 | 0.0480 | 4.32 | 0.92 | 0.93 |
| Resistor (Ω) | σ (Ω) | Max. Rel. Error (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CM | M.I | M.II | CM | M.I | M.II | CM | M.I | M.II | CM | M.I | M.II | |
| 267.8 | 281.26 | 267.57 | 267.79 | 0.07 | 0.13 | 0.27 | 5.024 | 0.084 | 0.003 | 5.09 | 0.23 | 0.28 |
| 556.2 | 582.40 | 555.57 | 556.05 | 0.23 | 0.24 | 0.56 | 4.710 | 0.112 | 0.026 | 4.82 | 0.24 | 0.24 |
| 747.5 | 782.62 | 746.96 | 747.56 | 0.35 | 0.34 | 0.72 | 4.699 | 0.073 | 0.007 | 4.82 | 0.21 | 0.29 |
| 1097.3 | 1148.69 | 1096.37 | 1097.19 | 0.76 | 0.49 | 1.11 | 4.683 | 0.085 | 0.010 | 4.84 | 0.23 | 0.25 |
| 1685 | 1764.66 | 1682.75 | 1684.35 | 1.63 | 0.96 | 1.56 | 4.728 | 0.133 | 0.039 | 4.96 | 0.33 | 0.26 |
| 2198.4 | 2303.55 | 2194.70 | 2196.60 | 2.87 | 1.48 | 2.22 | 4.783 | 0.169 | 0.082 | 5.05 | 0.42 | 0.41 |
| 2616.1 | 2742.63 | 2610.56 | 2612.82 | 4.00 | 2.06 | 2.74 | 4.837 | 0.212 | 0.125 | 5.18 | 0.50 | 0.52 |
| 3282.6 | 3445.09 | 3273.91 | 3276.74 | 6.24 | 3.06 | 3.56 | 4.950 | 0.265 | 0.178 | 5.33 | 0.58 | 0.47 |
| 3883.2 | 4078.77 | 3870.33 | 3873.94 | 9.06 | 5.08 | 5.51 | 5.036 | 0.332 | 0.239 | 5.86 | 0.90 | 0.70 |
| 4656.5 | 4898.48 | 4639.66 | 4643.91 | 13.15 | 6.85 | 7.41 | 5.197 | 0.362 | 0.270 | 5.72 | 1.00 | 0.98 |
| 5621.4 | 5921.96 | 5594.59 | 5599.92 | 19.02 | 10.84 | 11.32 | 5.347 | 0.477 | 0.382 | 6.07 | 1.34 | 1.13 |
| 6789.6 | 7164.40 | 6751.60 | 6756.99 | 29.33 | 12.53 | 14.07 | 5.520 | 0.560 | 0.480 | 6.54 | 1.15 | 1.13 |
| 8170.5 | 8641.64 | 8116.76 | 8123.23 | 40.25 | 24.32 | 24.42 | 5.766 | 0.658 | 0.579 | 6.77 | 1.94 | 1.82 |
| 9963.2 | 10,564.45 | 9875.72 | 9883.93 | 60.05 | 30.64 | 30.59 | 6.035 | 0.878 | 0.796 | 7.31 | 2.44 | 2.32 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hidalgo-López, J.A.; Oballe-Peinado, Ó.; Castellanos-Ramos, J.; Sánchez-Durán, J.A.; Fernández-Ramos, R.; Vidal-Verdú, F. High-Accuracy Readout Electronics for Piezoresistive Tactile Sensors. Sensors 2017, 17, 2513. https://doi.org/10.3390/s17112513
Hidalgo-López JA, Oballe-Peinado Ó, Castellanos-Ramos J, Sánchez-Durán JA, Fernández-Ramos R, Vidal-Verdú F. High-Accuracy Readout Electronics for Piezoresistive Tactile Sensors. Sensors. 2017; 17(11):2513. https://doi.org/10.3390/s17112513
Chicago/Turabian StyleHidalgo-López, José A., Óscar Oballe-Peinado, Julián Castellanos-Ramos, José A. Sánchez-Durán, Raquel Fernández-Ramos, and Fernando Vidal-Verdú. 2017. "High-Accuracy Readout Electronics for Piezoresistive Tactile Sensors" Sensors 17, no. 11: 2513. https://doi.org/10.3390/s17112513