Towards Robot-Assisted Retinal Vein Cannulation: A Motorized Force-Sensing Microneedle Integrated with a Handheld Micromanipulator † †

Abstract
:1. Introduction
1.1. Motivation
1.2. Background
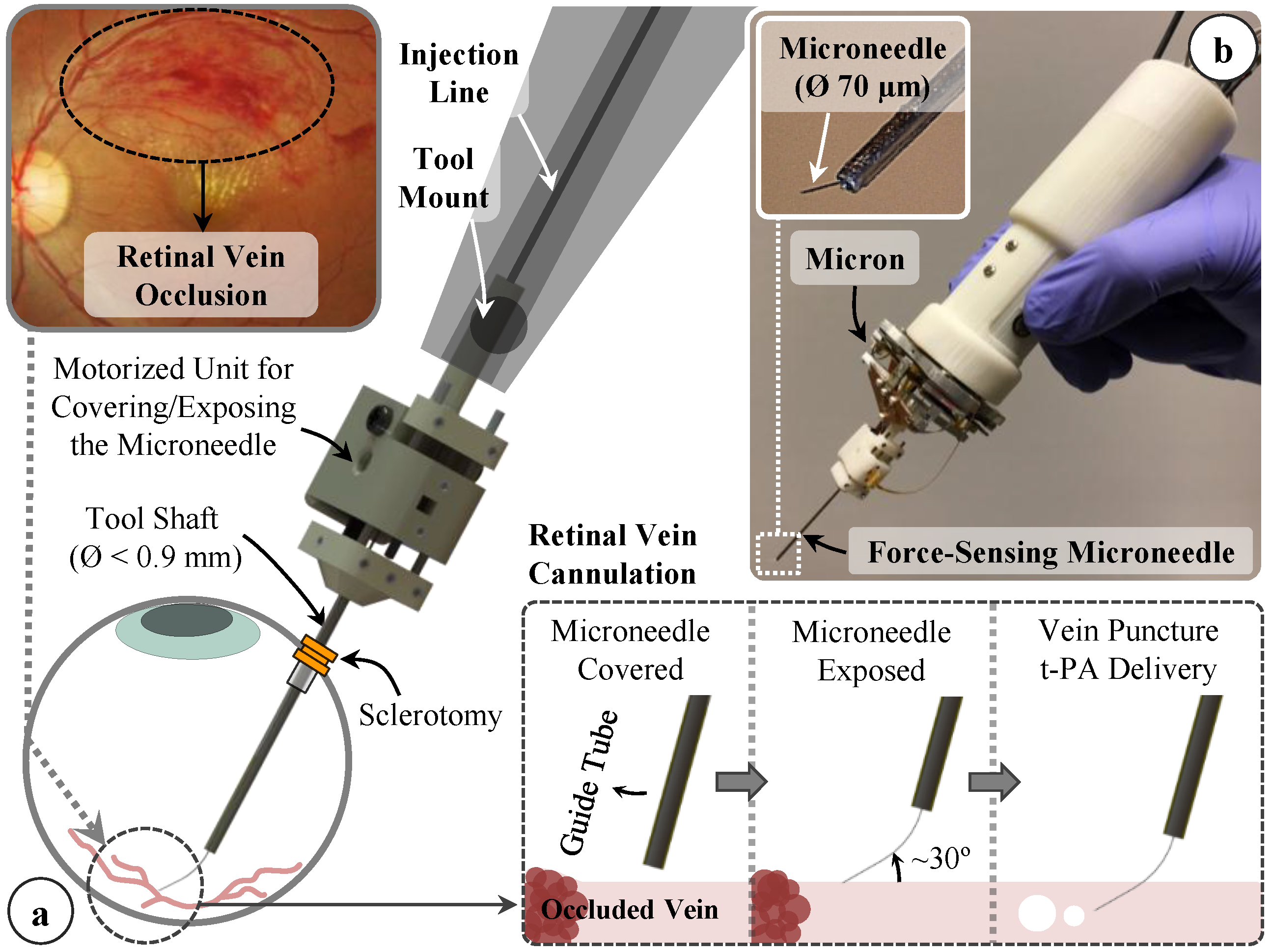
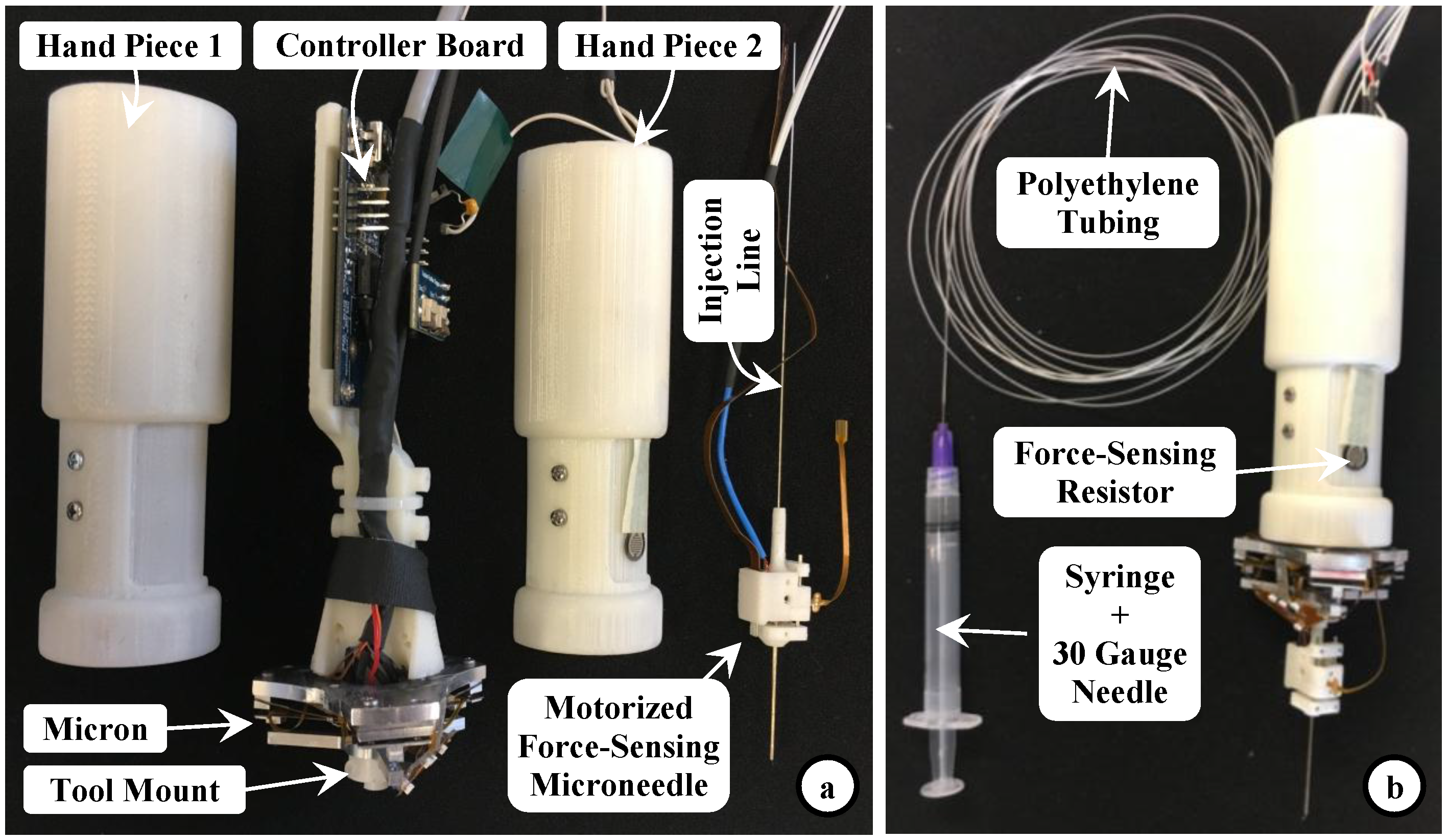
2. System Components
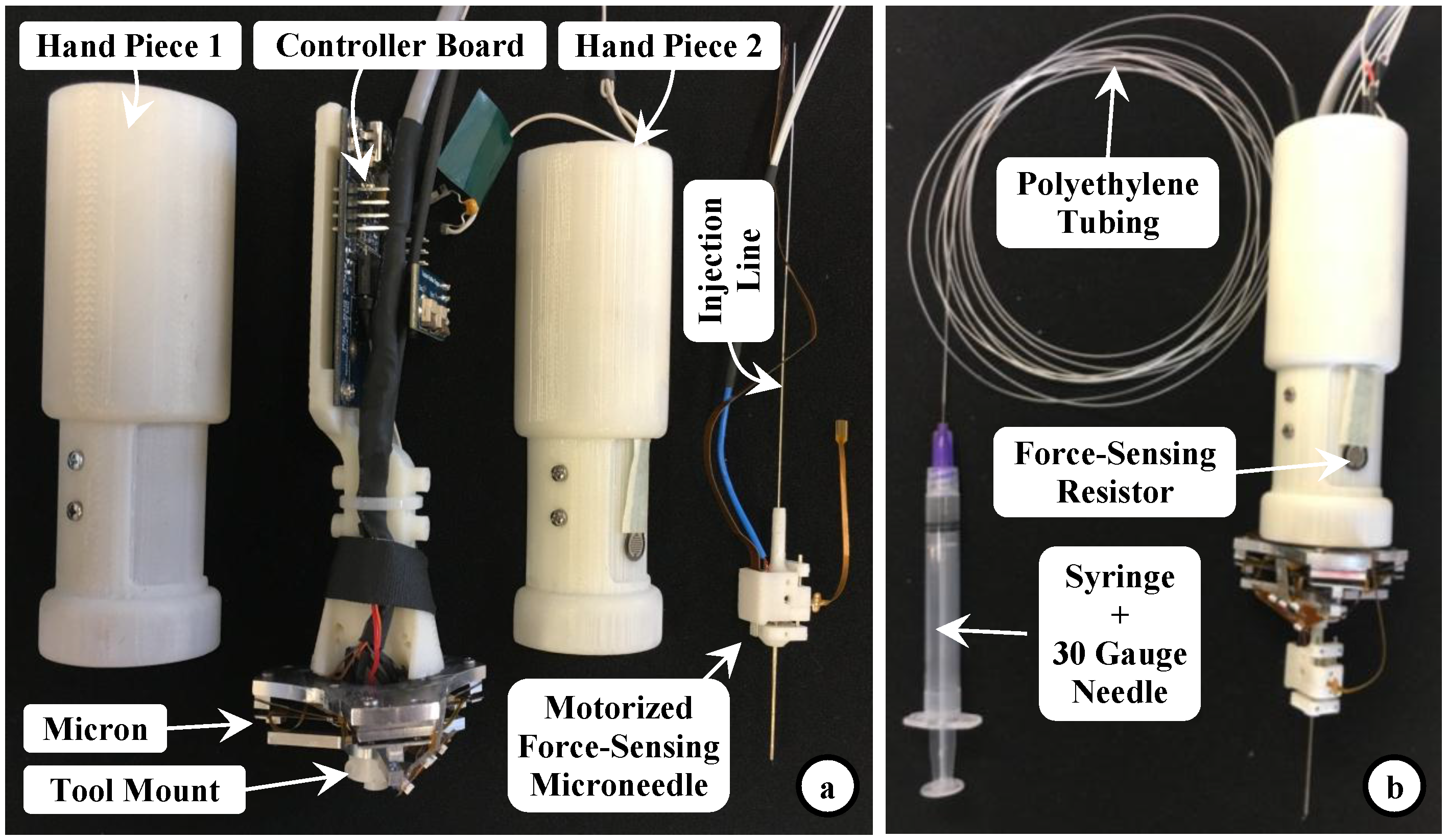
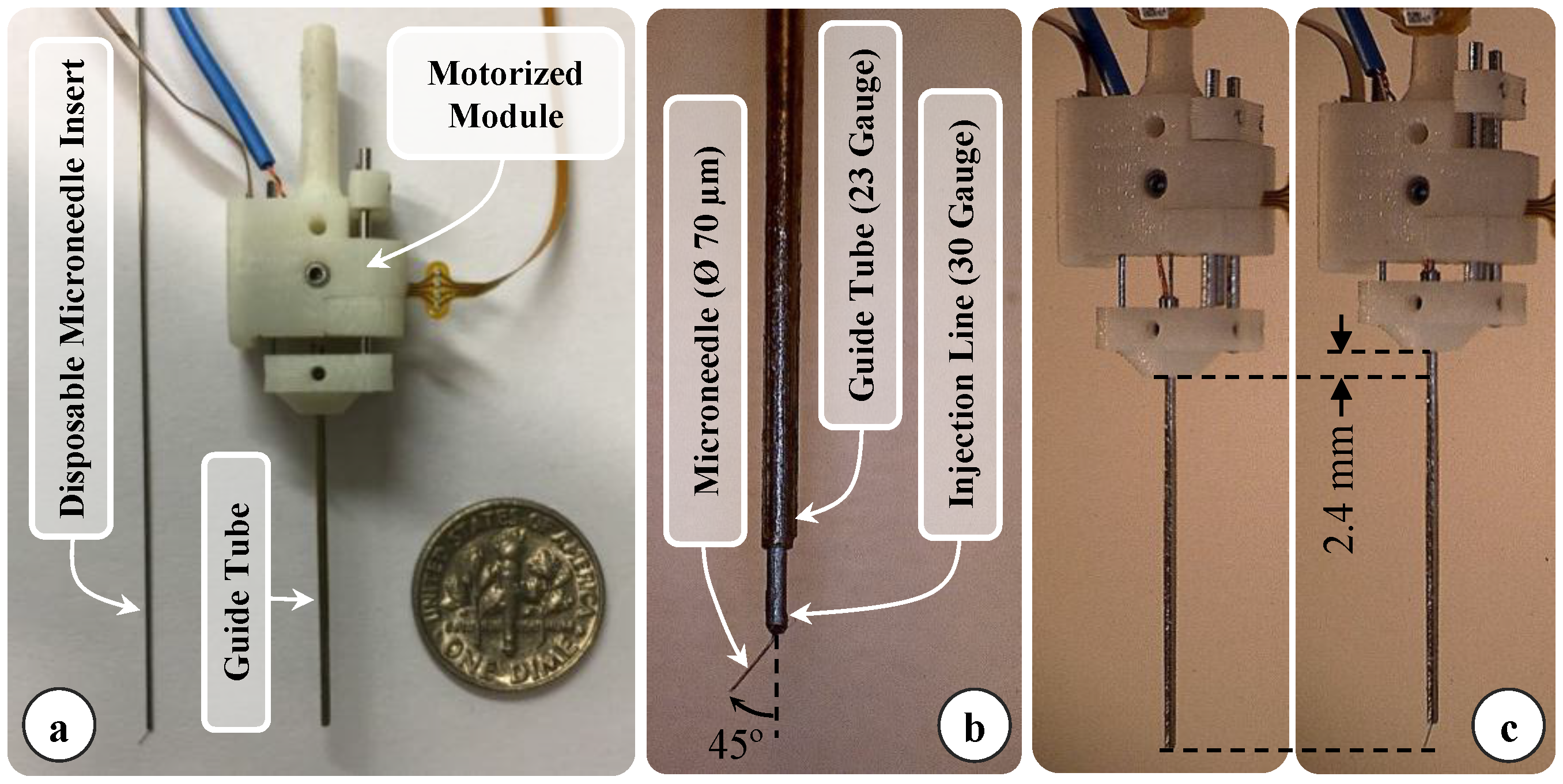
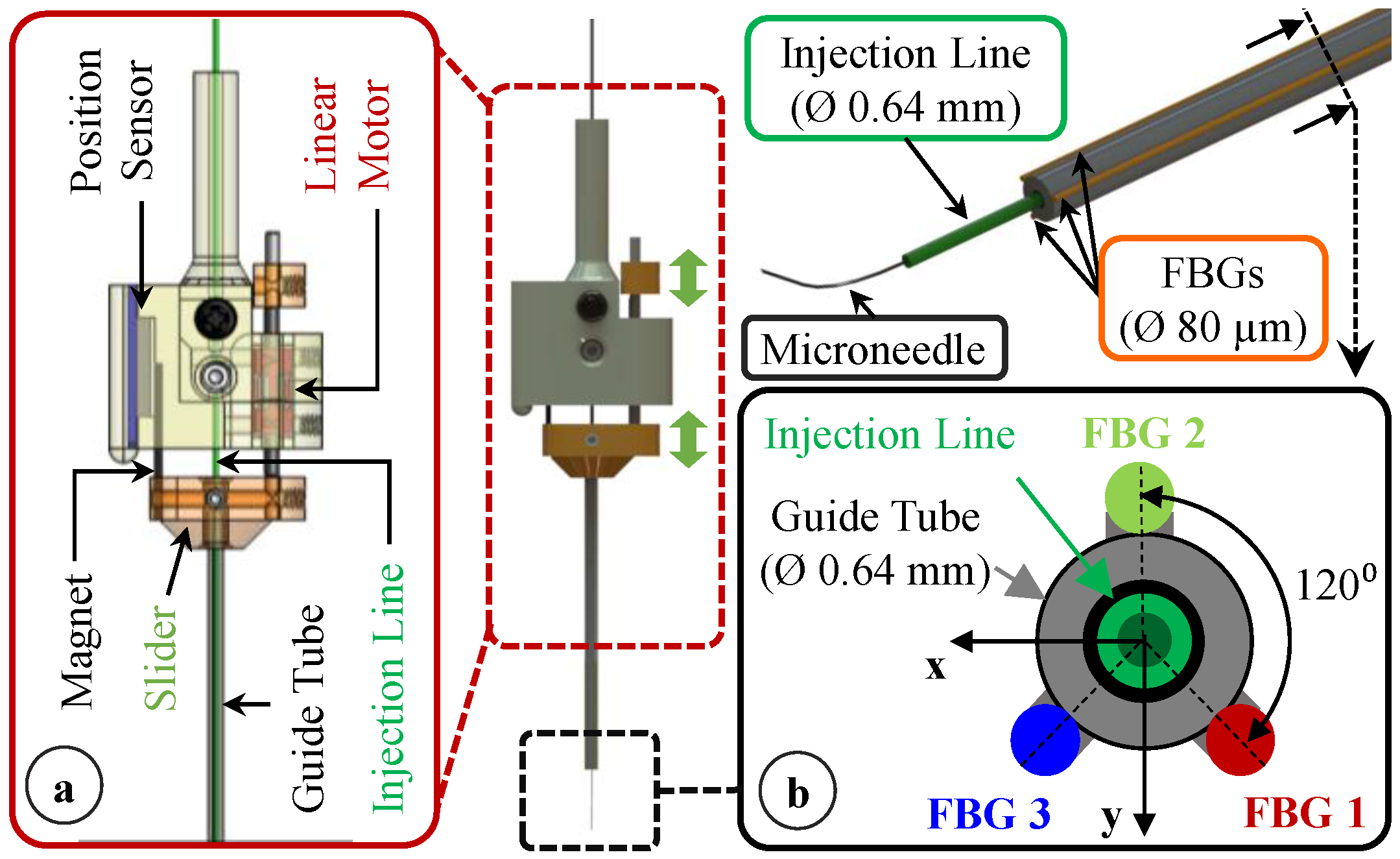
2.1. Motorized Force-Sensing Microneedle
2.1.1. Actuation Mechanism
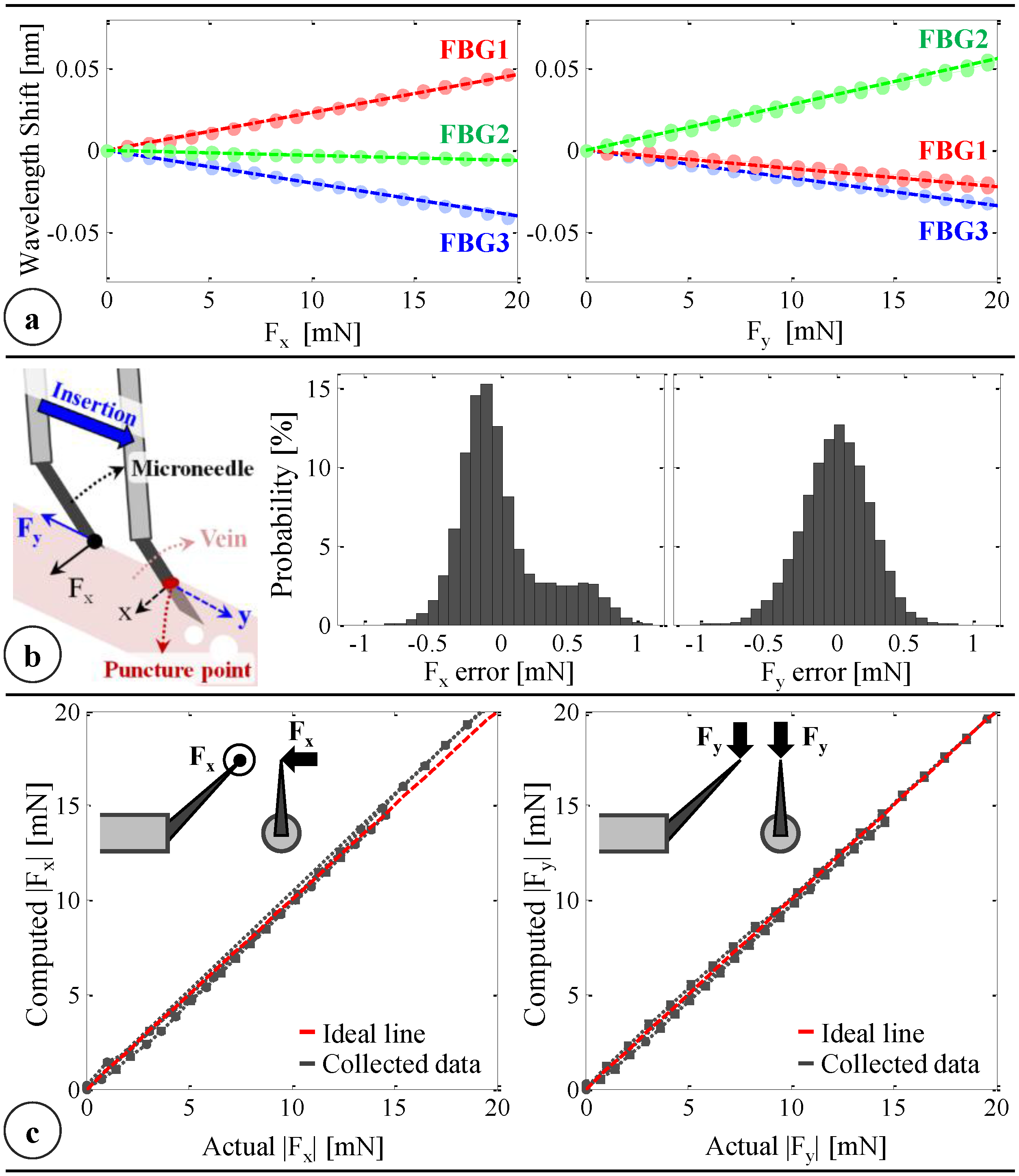
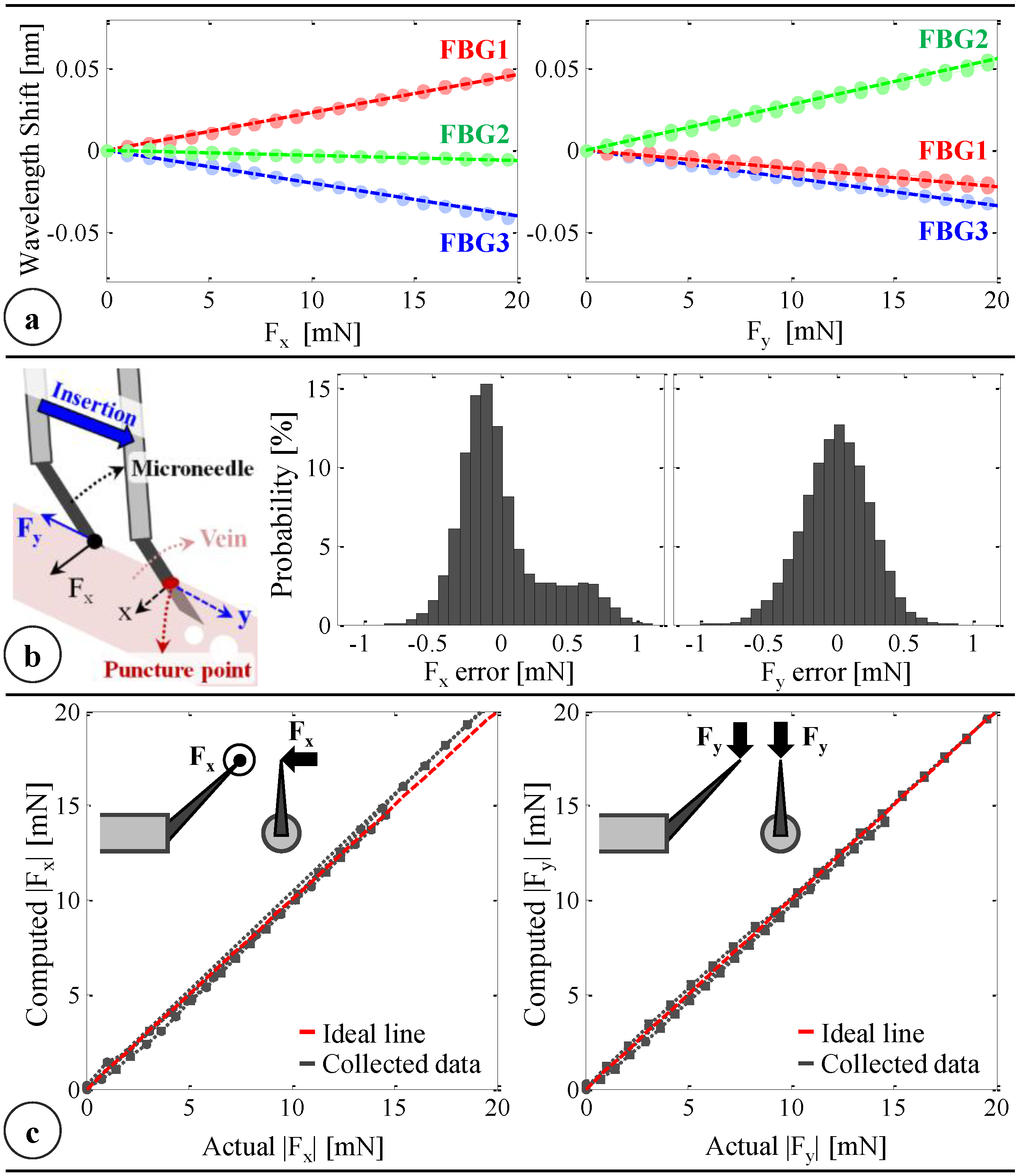
2.1.2. Force Sensor Integration
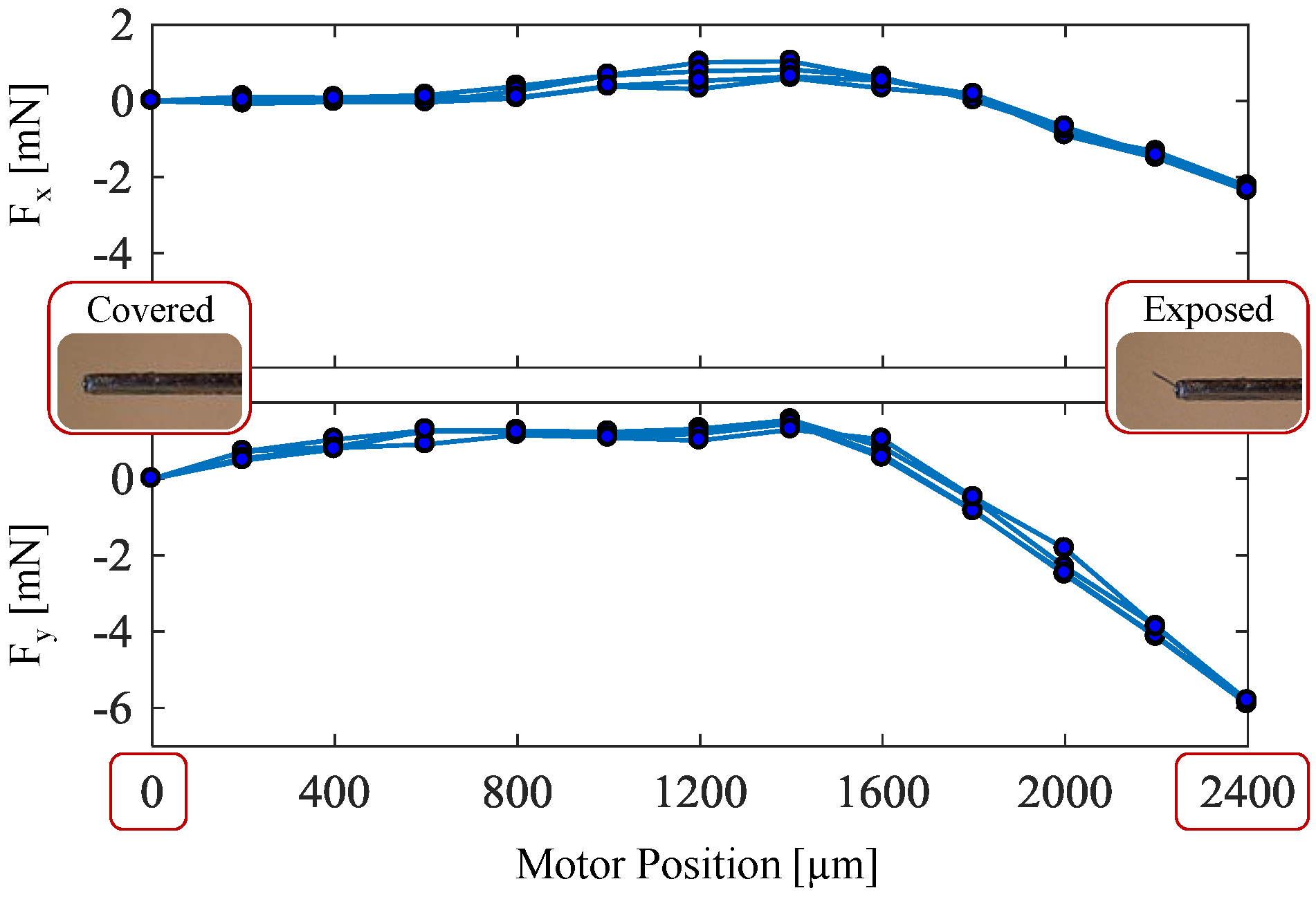
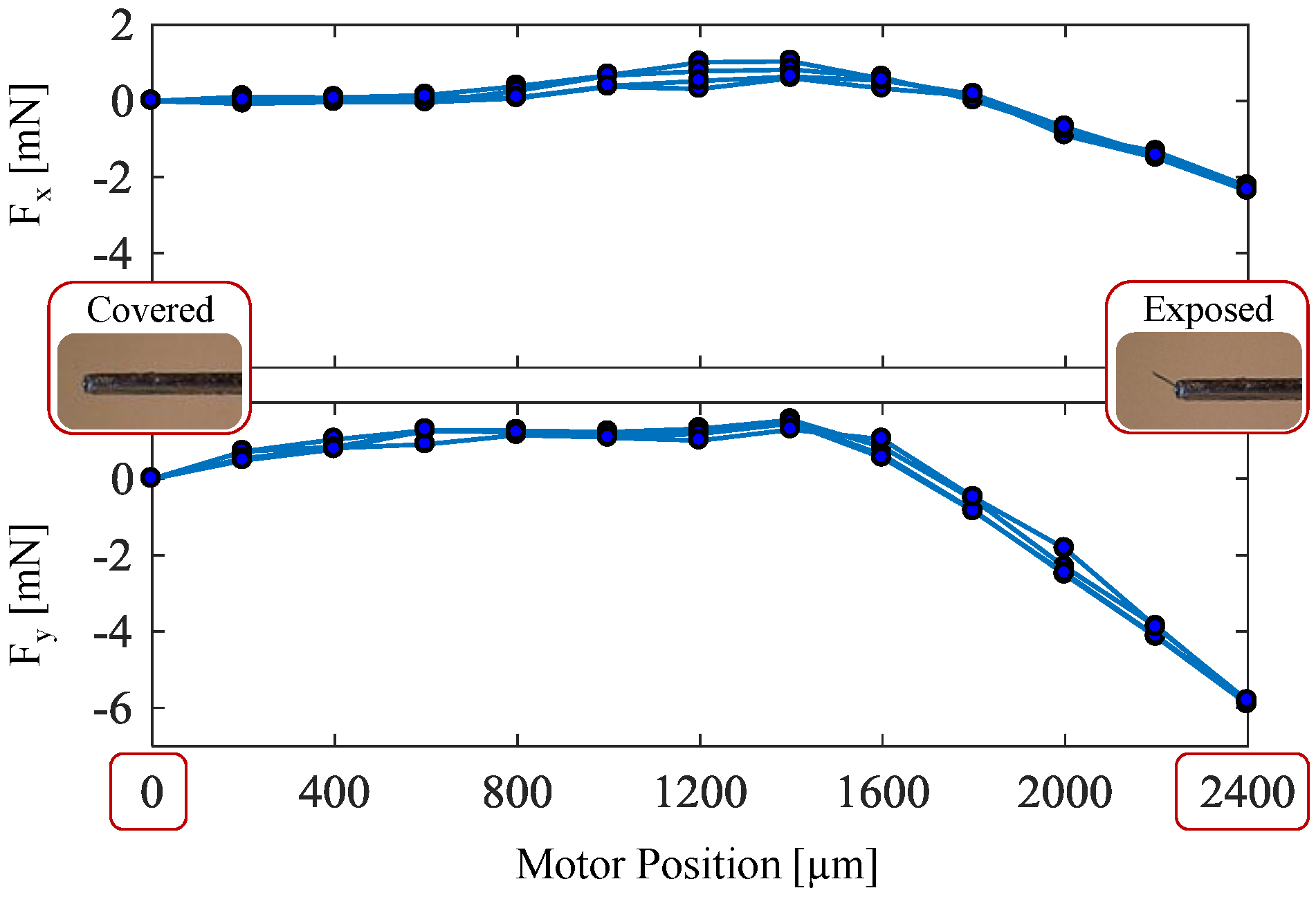
2.1.3. Effect of Actuation on Force Sensor Response
2.2. Integration with a Handheld Micromanipulation System: Micron
3. System Operation
3.1. Control Scheme
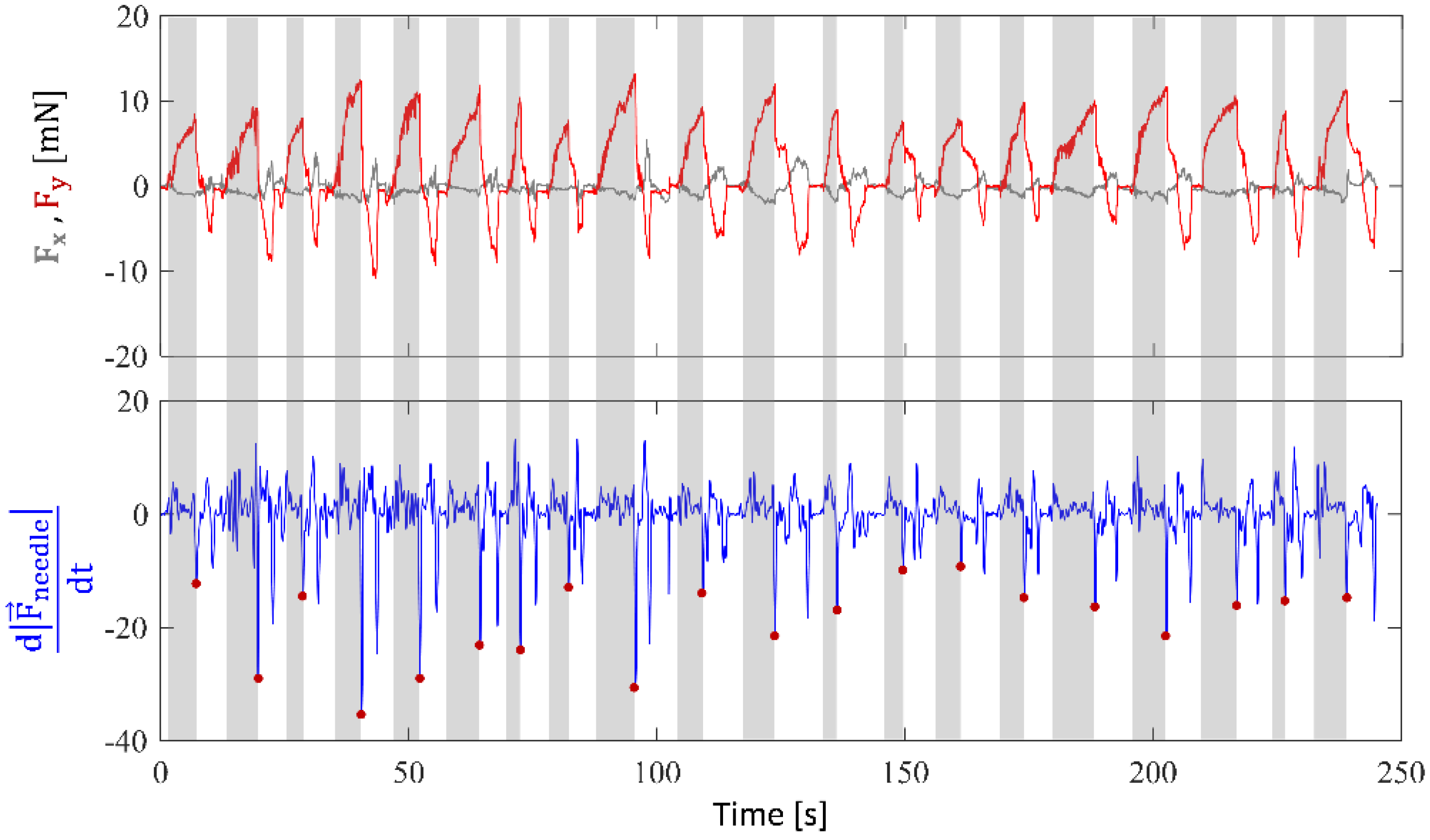
3.2. Venous Puncture Detection
3.2.1. Force-Based Method
3.2.2. Force-and-Position-Based Method
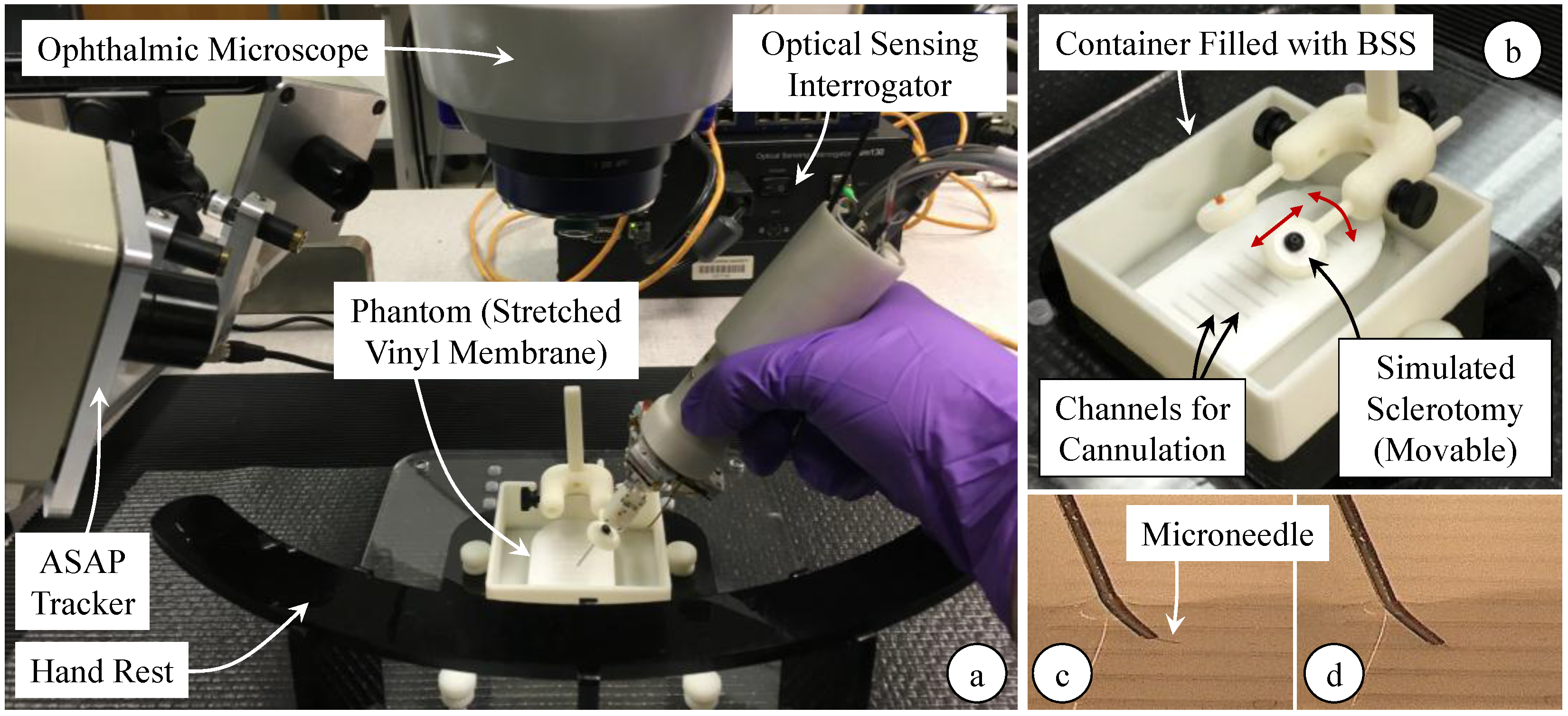
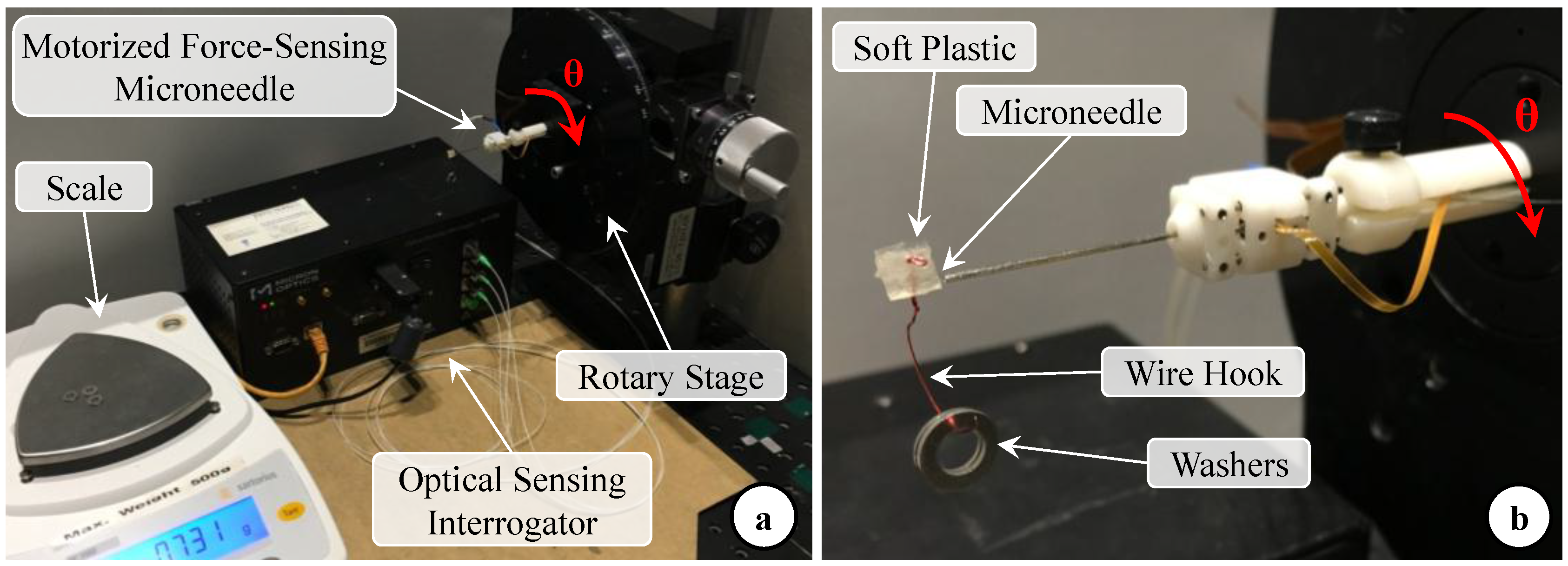
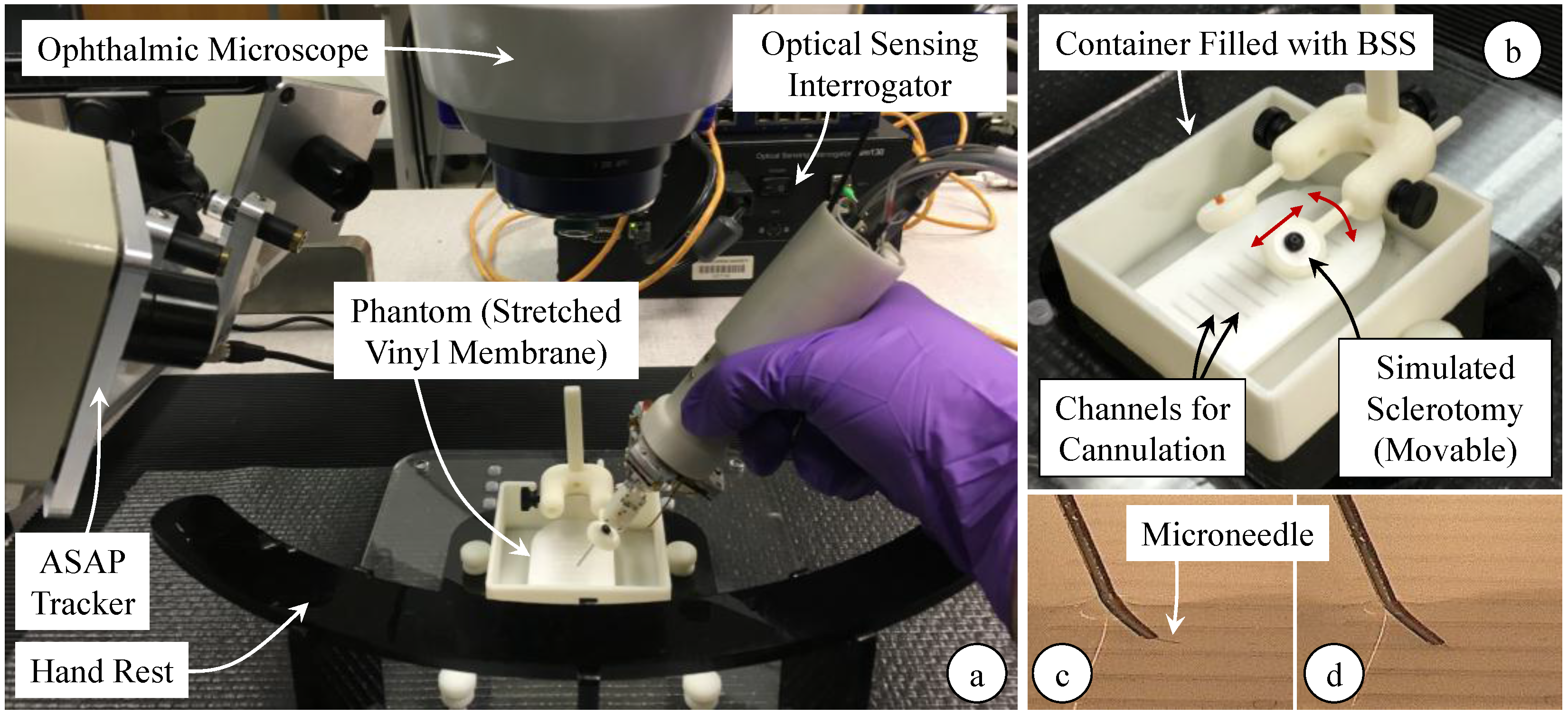
4. Experiments
5. Results
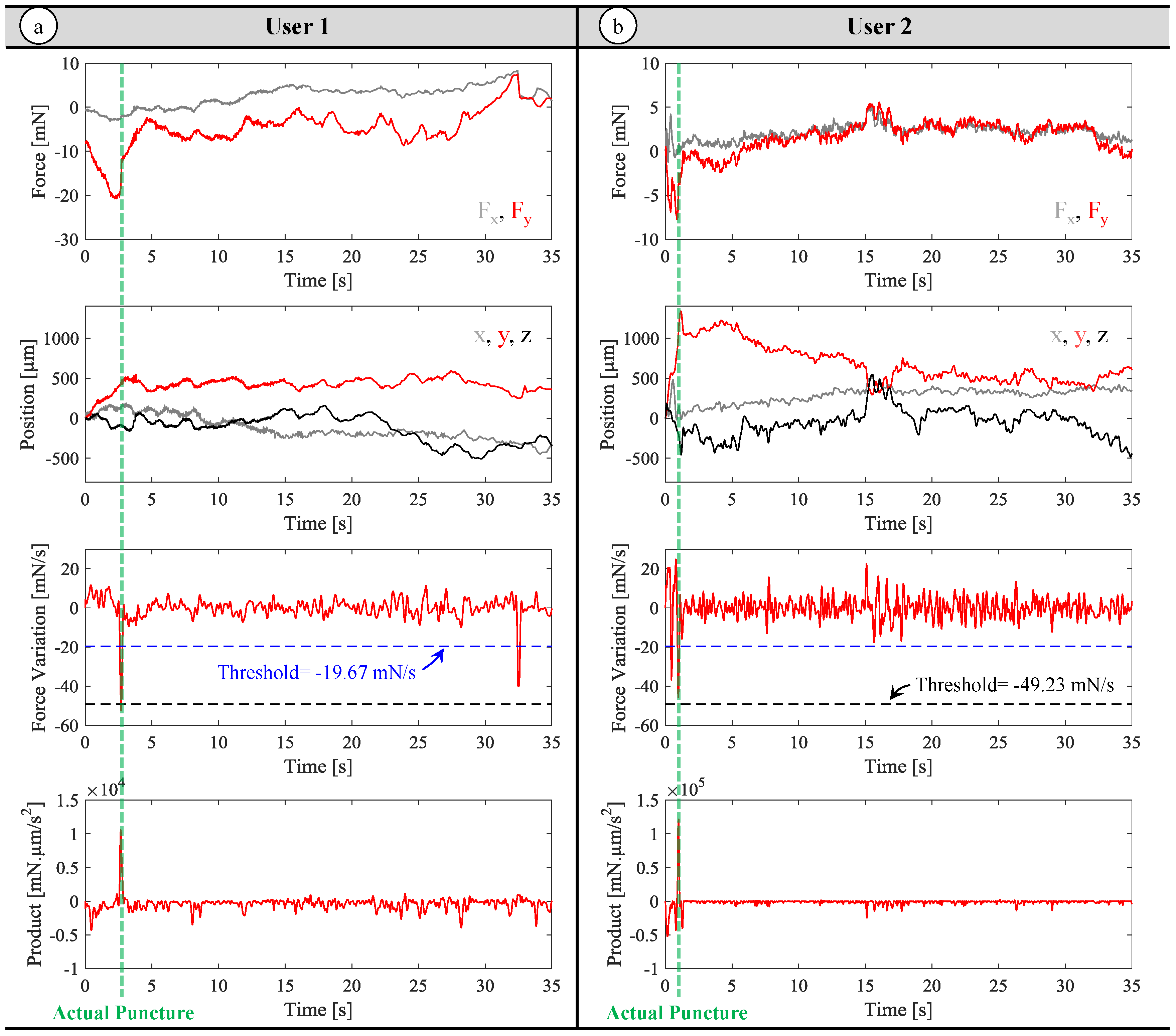
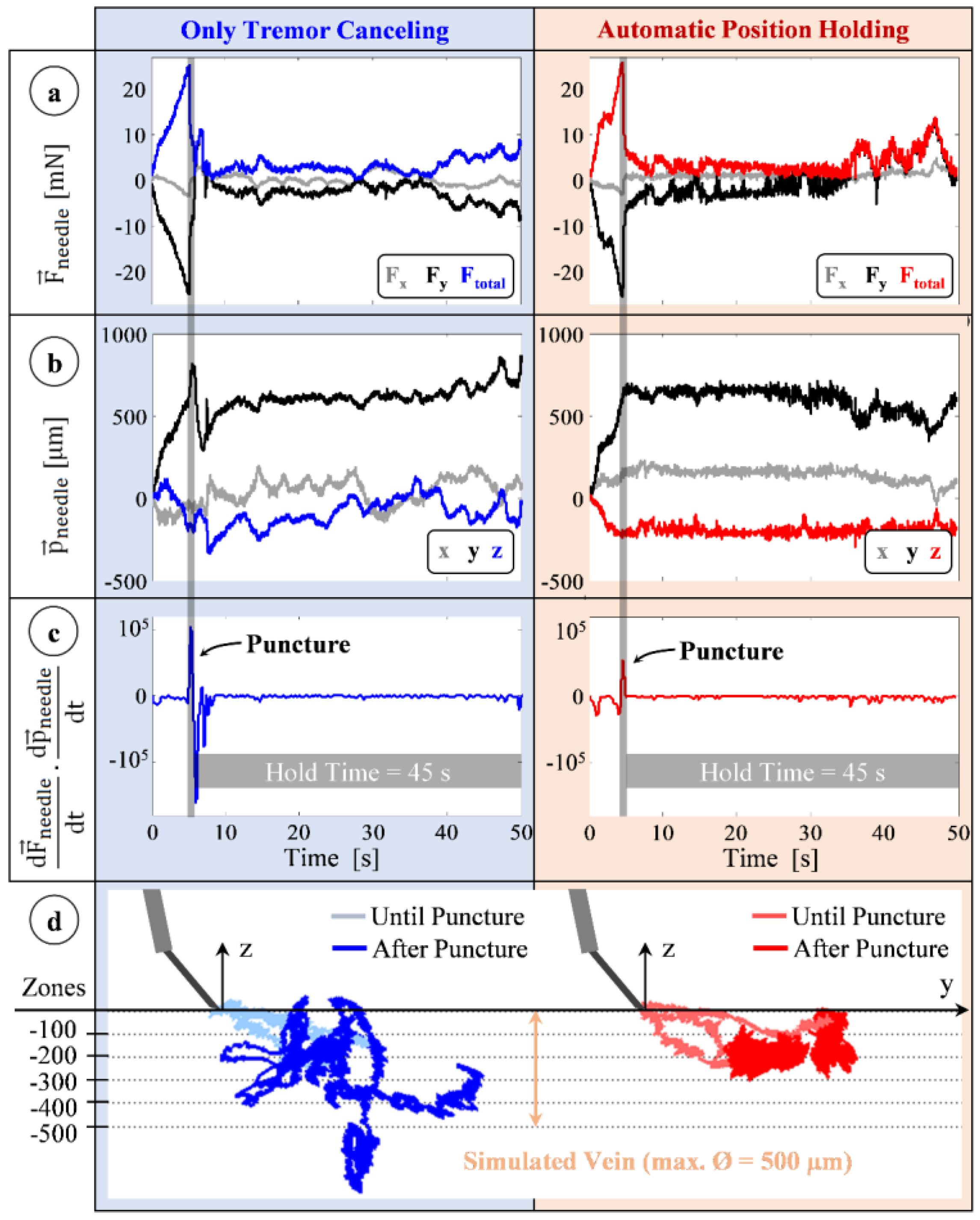
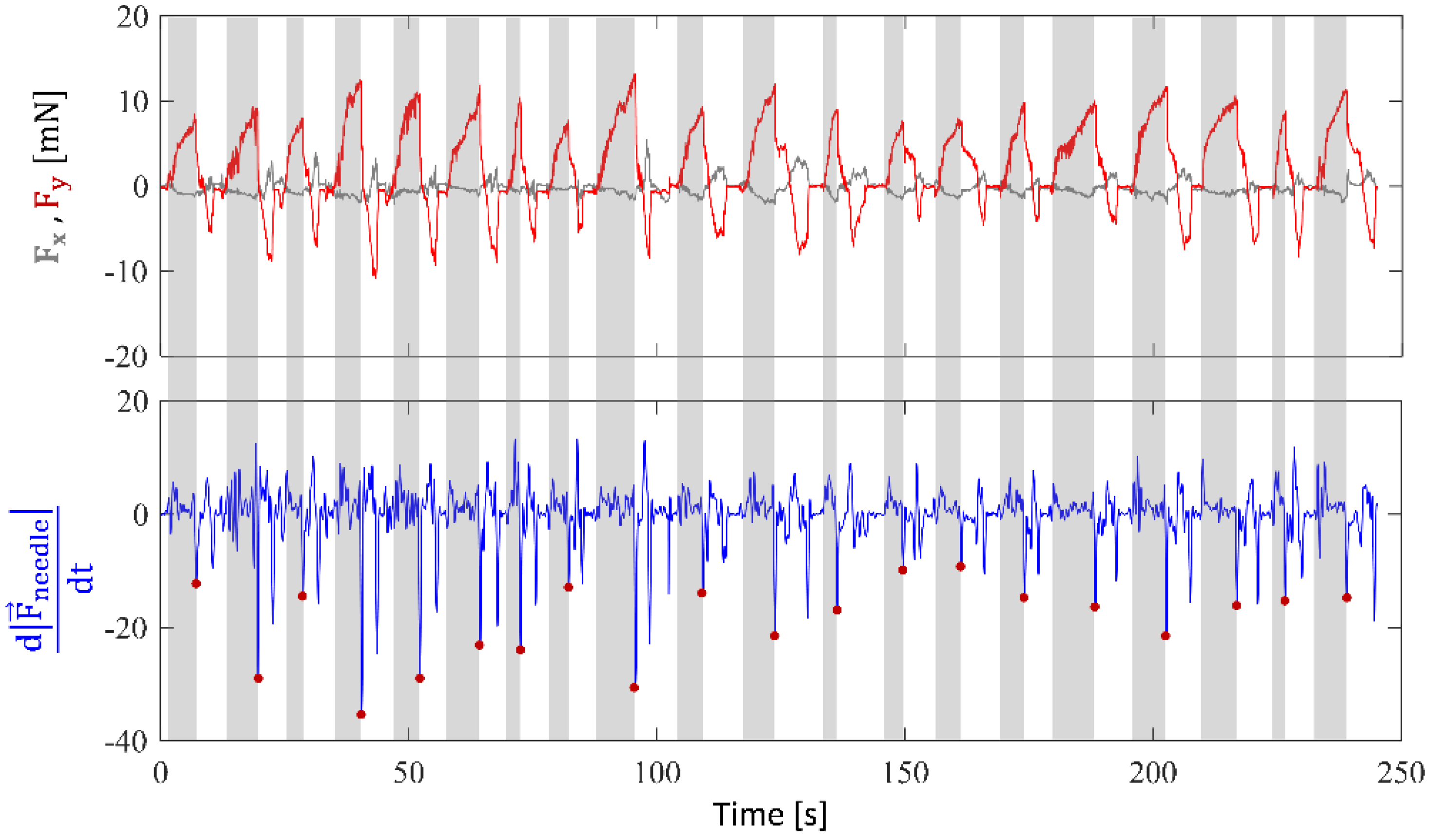
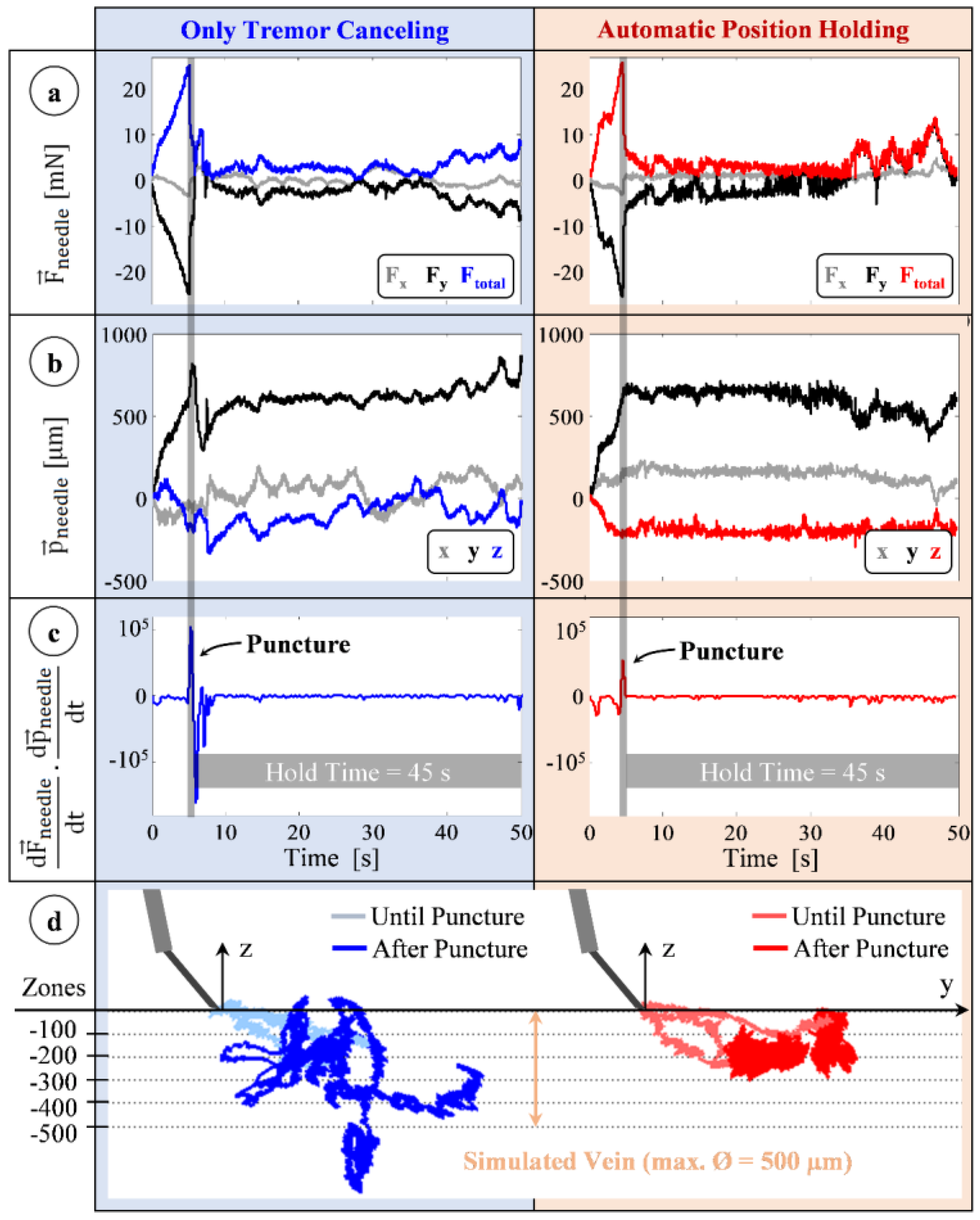
5.1. Experiment 1: Evaluation of the Puncture Detection Methods
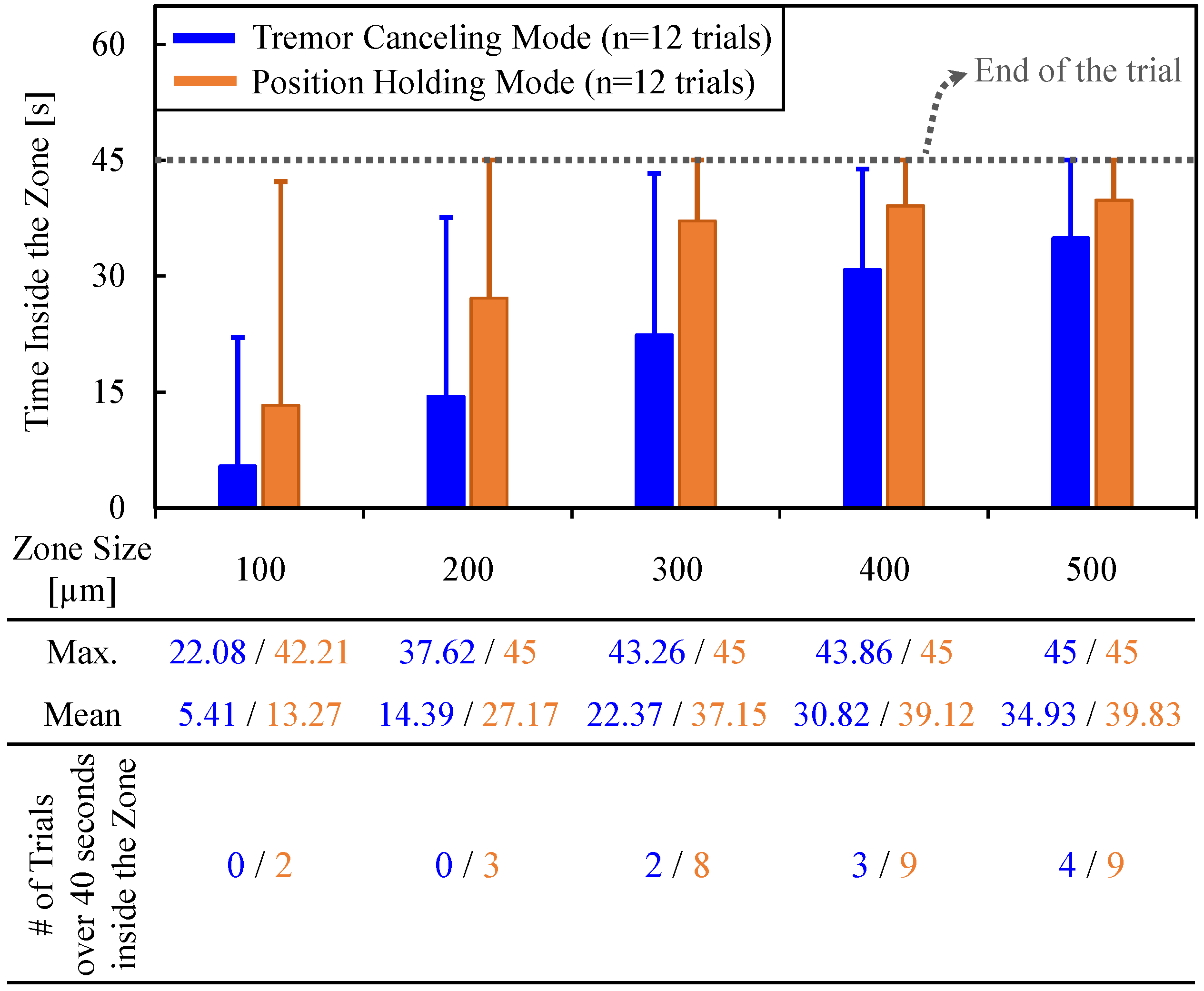
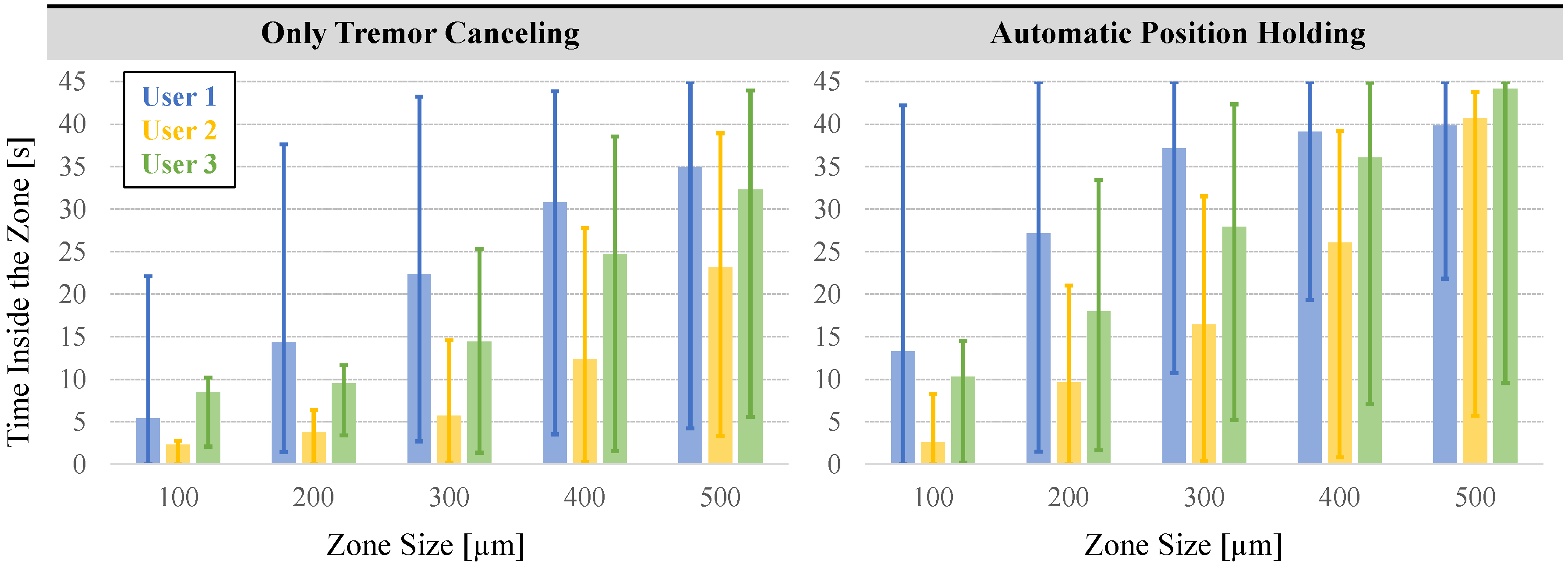
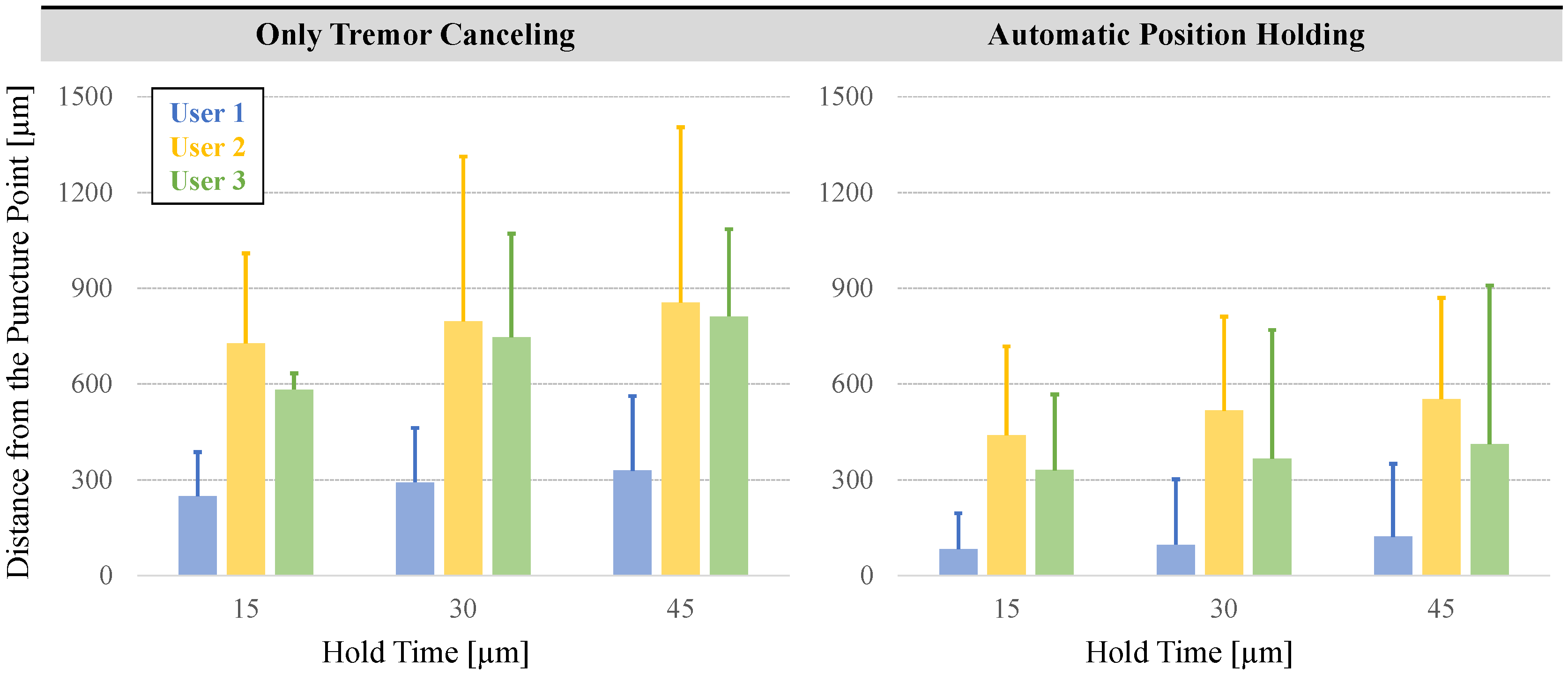
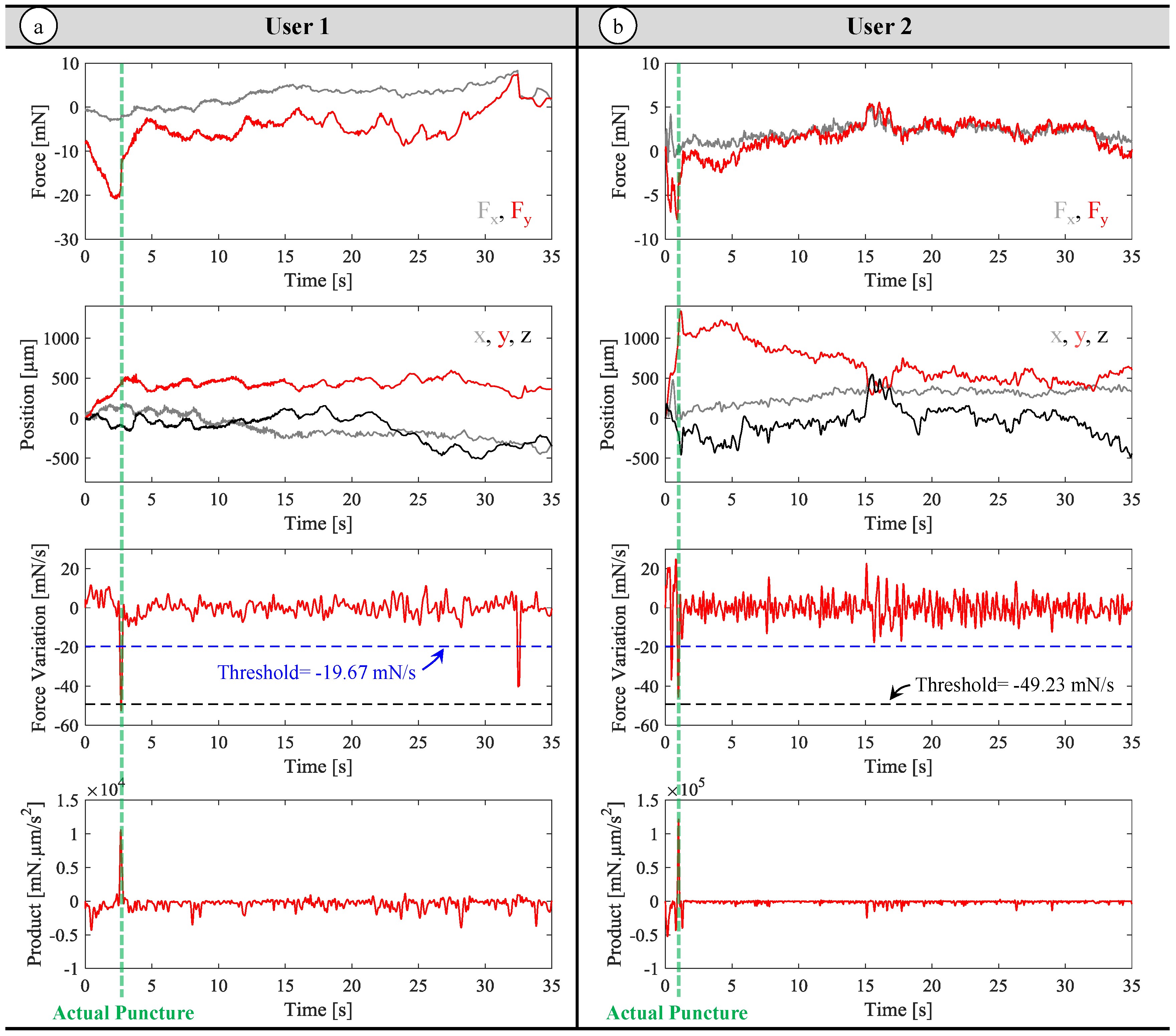
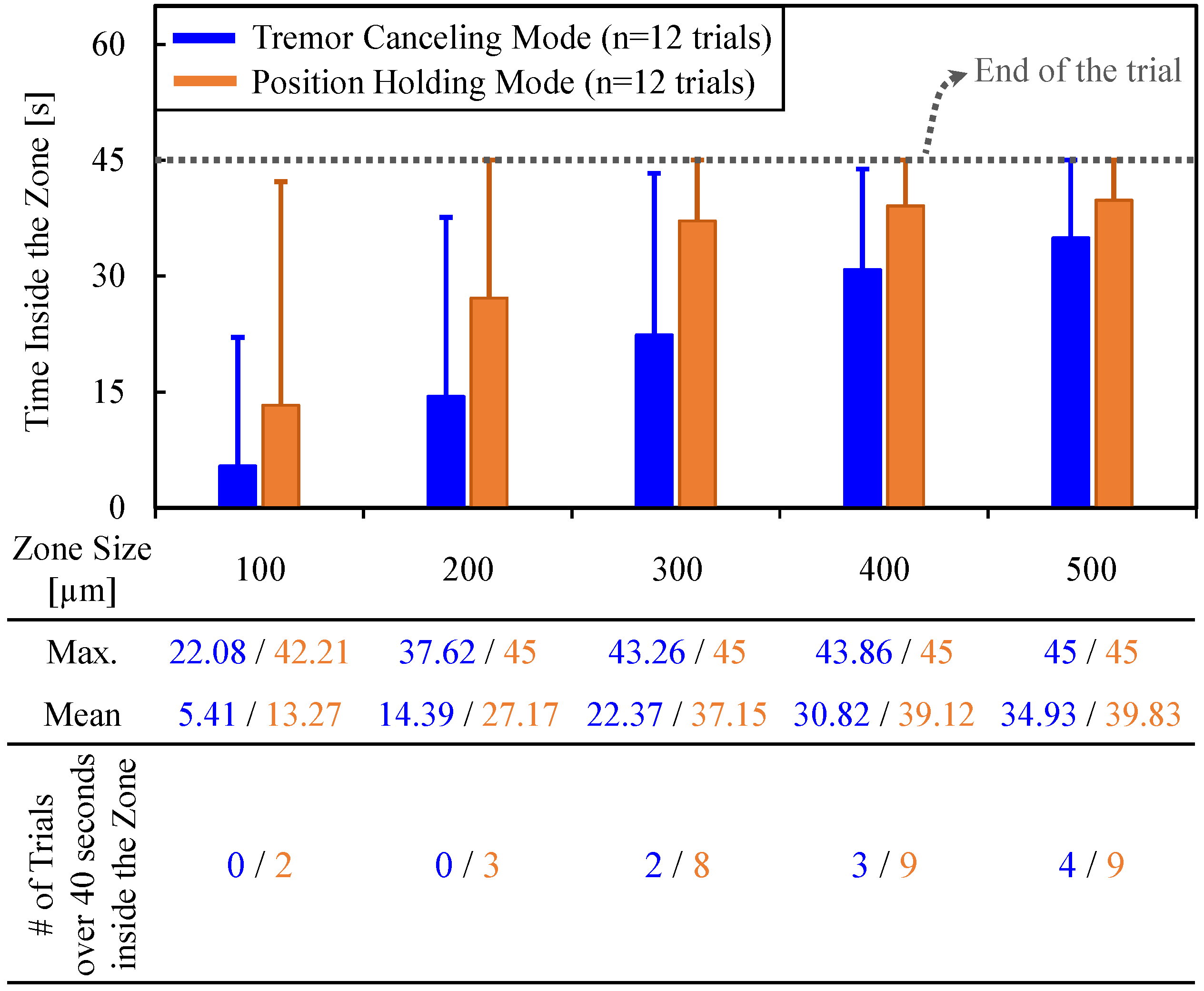
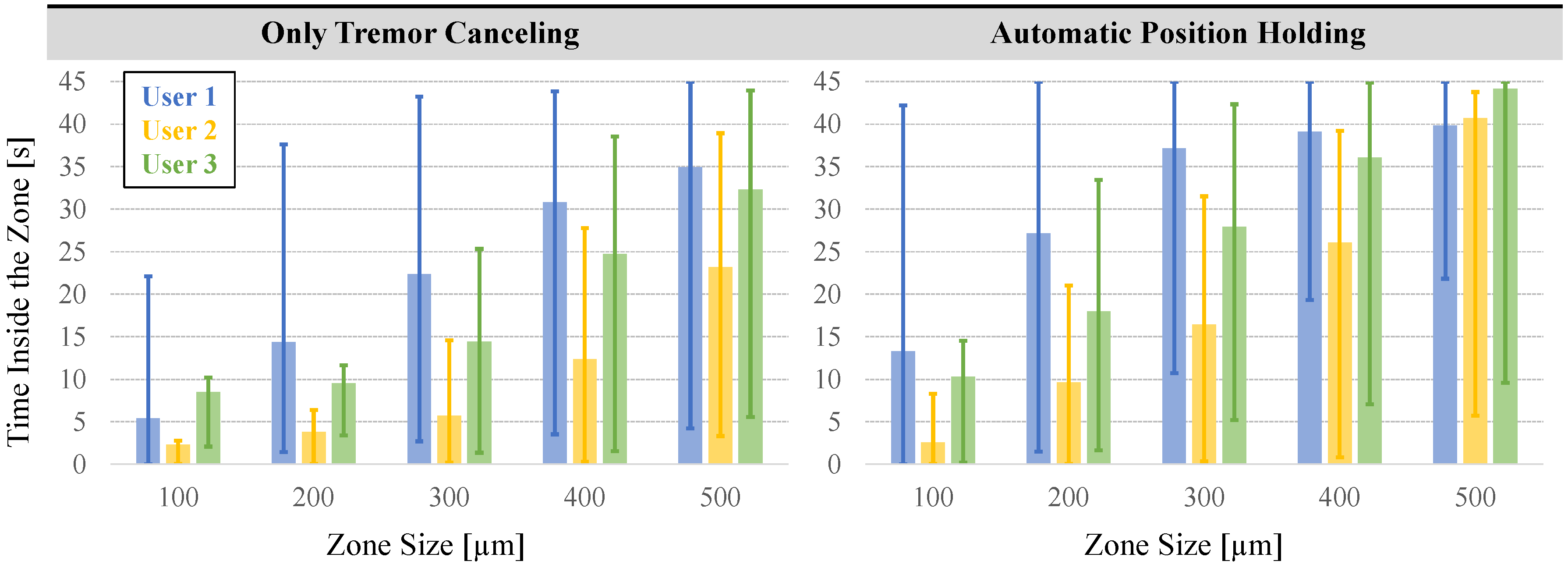
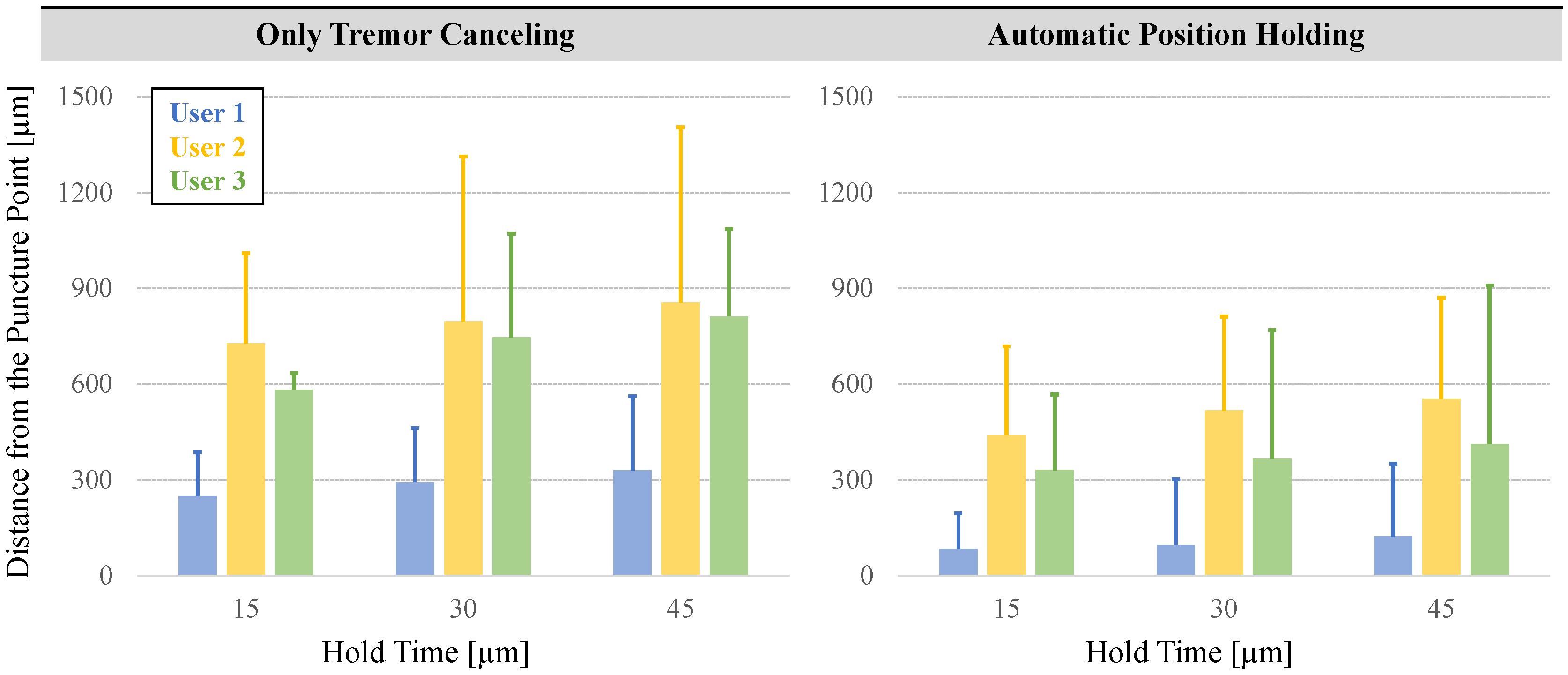
5.2. Experiment 2: A Multi-User System Evaluation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rogers, S.; McIntosh, R.L.; Cheung, N.; Lim, L.; Wang, J.J.; Mitchell, P.; Kowalski, J.W.; Nguyen, H.; Wong, T.Y. The prevalence of retinal vein occlusion: Pooled data from population studies from the United States, Europe, Asia, and Australia. Ophthalmology 2010, 117, 313–319. [Google Scholar] [CrossRef] [PubMed]
- Klein, R.; Moss, S.E.; Meuer, S.M.; Klein, B.E.K. The 15-year cumulative incidence of retinal vein occlusion: The beaver dam eye study. Arch. Ophthalmol. 2008, 126, 513–518. [Google Scholar] [CrossRef] [PubMed]
- The Central Vein Occlusion Study Group. Natural history and clinical management of central retinal vein occlusion. Arch. Ophthalmol. 1997, 115, 486–491. [Google Scholar]
- Wong, T.Y.; Scott, I.U. Retinal Vein Occlusion. N. Engl. J. Med. 2010, 363, 2135–2144. [Google Scholar] [CrossRef] [PubMed]
- Hayreh, S.S. Retinal vein occlusion. Indian J. Ophthalmol. 1994, 42, 109–132. [Google Scholar] [PubMed]
- Inagaki, K.; Ohkoshi, K.; Ohde, S.; Deshpande, G.A.; Ebihara, N.; Murakami, A. Subthreshold micropulse photocoagulation for persistent macular edema secondary to branch retinal vein occlusion including best-corrected visual acuity greater than 20/40. J. Ophthalmol. 2014, 2014. [Google Scholar] [CrossRef] [PubMed]
- Glacet-Bernard, A.; Atassi, M.; Fardeau, C.; Romanet, J.P.; Tonini, M.; Contrath, J.; Denis, P.; Mauget-Faÿsse, M.; Coscas, G.; Soubrane, G.; et al. Hemodilution therapy using automated erythrocytapheresis in central retinal vein occlusion: Results of a multicenter randomized controlled study. Graefe Arch. Clin. Exp. Ophthalmol. 2011, 249, 505–512. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Arumi, J.; Boixadera, A.; Martinez-Castillo, V.; Montolio, M.; Verdugo, A.; Corcostegui, B. Radial optic neurotomy in central retinal vein occlusion: Comparison of outcome in younger vs older patients. Am. J. Ophthalmol. 2007, 143, 134–140. [Google Scholar] [CrossRef] [PubMed]
- Kumagai, K.; Furukawa, M.; Ogino, N.; Uemura, A.; Larson, E. Long-term outcomes of vitrectomy with or without arteriovenous sheathotomy in branch retinal vein occlusion. Retina 2007, 27, 49–54. [Google Scholar] [CrossRef] [PubMed]
- Moisseiev, E.; Goldstein, M.; Waisbourd, M.; Barak, A.; Lowenstein, A. Long-term evaluation of patients treated with dexamethaxone intravitreal implant for macular edema due to retinal vein occlusion. Eye 2013, 27, 65–71. [Google Scholar] [CrossRef] [PubMed]
- Weiss, J.N.; Bynoe, L.A. Injection of tissue plasminogen activator into a branch retinal vein in eyes with central vein occlusion. Ophthalmology 2001, 108, 2249–2257. [Google Scholar] [CrossRef]
- De Smet, M.D.; Stassen, J.M.; Meenink, T.C.M.; Janssens, T.; Vanheukelom, V.; Naus, G.J.; Beelen, M.J.; Jonckx, B. Release of experimental retinal vein occlusions by direct intraluminal injection of ocriplasmin. Br. J. Ophthalmol. 2016, 100, 1742–1746. [Google Scholar] [CrossRef] [PubMed]
- Hamid, S.; Mirza, S.A.; Shokh, I. Branch retinal vein occlusion. J. Ayub. Med. Coll. Abbottabad 2008, 20, 128–132. [Google Scholar] [PubMed]
- Tsilimbaris, M.K.; Lit, E.S.; D’Amico, D.J. Retinal microvascular surgery: A feasibility study. Investig. Ophthalmol. Vis. Sci. 2004, 45, 1963–1968. [Google Scholar] [CrossRef] [PubMed]
- Weiss, J.N. Apparatus and Method for Cannulating Retinal Blood Vessels. U.S. Patent 6,402,734 B1, 11 June 2002. [Google Scholar]
- Glucksberg, M.R.; Dunn, R.; Giebs, C.P. In vivo micropuncture of retinal vessels. Graefes Arch. Clin. Exp. Ophthalmol. 1993, 231, 405–407. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, Y.; Matsuhashi, H.; Nakazawa, M. In vivo retinal vascular cannulation in rabbits. Graefes Arch. Clin. Exp. Ophthalmol. 2003, 241, 585–588. [Google Scholar] [CrossRef] [PubMed]
- Willekens, K.; Gijbels, A.; Schoevaerdts, L.; Esteveny, L.; Janssens, T.; Jonckx, B.; Feyen, J.H.M.; Meers, C.; Reynaerts, D.; Vander Poorten, E.; et al. Robot-assisted retinal vein cannulation in an in vivo porcine retinal vein occlusion model. Acta Ophthalmol. 2017. [Google Scholar] [CrossRef] [PubMed]
- Kadonosono, K.; Arakawa, A.; Yamane, S.; Uchio, E.; Yanagi, Y. An experimental study of retinal endovascular surgery with a fabricated needle. Invest. Opthalmol. Vis. Sci. 2011, 52, 5790–5793. [Google Scholar] [CrossRef] [PubMed]
- Asami, T.; Kaneko, H.; Miyake, K.; Ota, I.; Miyake, G.; Kato, S.; Yasuda, S.; Iwase, T.; Ito, Y.; Terasaki, H. An endovascular cannulation needle with an internal wire for the fragmentation of thrombi in retinal vein occlusion. Transl. Vis. Sci. Technol. 2016, 5, 9. [Google Scholar] [CrossRef] [PubMed]
- Kadonosono, K.; Yamane, S.; Arakawa, A.; Inoue, M.; Yamakawa, T.; Uchio, E.; Yanagi, Y.; Amano, S. Endovascular cannulation with a microneedle for central retinal vein occlusion. JAMA Ophthalmol. 2013, 131, 783–786. [Google Scholar] [CrossRef] [PubMed]
- Leng, T.; Miller, J.M.; Bilbao, K.V.; Palanker, D.V.; Huie, P.; Blumenkranz, M.S. The chick chorioallantoic membrane as a model tissue for surgical retinal research and simulation. Retina 2004, 24, 427–434. [Google Scholar] [CrossRef] [PubMed]
- Wei, W.; Popplewell, C.; Chang, S.; Fine, H.F.; Simaan, N. Enabling technology for microvascular stenting in ophthalmic surgery. J. Med. Devices 2010, 4, 014503. [Google Scholar] [CrossRef]
- Gijbels, A.; Poorten, E.B.V.; Stalmans, P.; Reynaerts, D. Development and Experimental Validation of a Force Sensing Needle for Robotically Assisted Retinal Vein Cannulations. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2270–2276. [Google Scholar]
- Gonenc, B.; Gehlbach, P.; Handa, J.; Taylor, R.H.; Iordachita, I. Force-Sensing Microneedle for Assisted Retinal Vein Cannulation. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 698–701. [Google Scholar]
- Singh, S.P.N.; Riviere, C.N. Physiological tremor amplitude during retinal microsurgery. In Proceedings of the IEEE 28th Annual Northeast Bioengineering Conference (IEEE Cat. No.02CH37342), Philadelphia, PA, USA, 20–21 April 2002; pp. 171–172. [Google Scholar]
- Channa, R.; Iordachita, I.; Handa, J.T. Robotic Vitreoretinal Surgery. Retina 2017. [Google Scholar] [CrossRef] [PubMed]
- Jensen, P.S.; Grace, K.W.; Attariwala, R.; Colgate, J.E.; Glucksberg, M.R. Toward robot-assisted vascular in the retina. Graefes Arch. Clin. Exp. Ophthalmol. 1997, 235, 696–701. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, S.; Harada, K.; Ida, Y.; Tomita, K.; Kato, I.; Arai, F.; Ueta, T.; Noda, Y.; Sugita, N.; Mitsuishi, M. Quantitative assessment of manual and robotic microcannulation for eye surgery using new eye model. Int. J. Med. Robot. Comput. Assist. Surg. 2014, 11, 210–217. [Google Scholar] [CrossRef] [PubMed]
- Meenink, T.; Naus, G.; de Smet, M.; Beelen, M.; Steinbuch, M. Robot assistance for micrometer precision in vitreoretinal surgery. Invest. Ophthalmol. Vis. Sci. 2013, 54, 5808. [Google Scholar]
- Nasseri, M.A.; Gschirr, P.; Eder, M.; Nair, S.; Kobuch, K.; Maier, M.; Zapp, D.; Lohmann, C.; Knoll, A. Virtual fixture control of a hybrid parallel-serial robot for assisting ophthalmic surgery: An experimental study. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014; pp. 732–738. [Google Scholar]
- Zhou, M.; Roodaki, H.; Eslami, A.; Chen, G.; Huang, K.; Maier, M.; Lohmann, C.P.; Knoll, A.; Nasseri, M.A. Needle segmentation in volumetric optical coherence tomography images for ophthalmic microsurgery. Appl. Sci. 2017, 7, 748. [Google Scholar] [CrossRef]
- Fleming, I.; Balicki, M.; Koo, J.; Iordachita, I.; Mitchell, B.; Handa, J.; Hager, G.; Taylor, R. Cooperative robot assistant for retinal microsurgery. Med. Image Comput. Comput. Assist. Interv. 5242, 2008, 543–550. [Google Scholar]
- Gijbels, A.; Wouters, N.; Stalmans, P.; van Brussel, H.; Reynaerts, D.; Poorten, E.V. Design and realisation of a novel robotic manipulator for retinal surgery. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3598–3603. [Google Scholar]
- Singh, A.V.; Sitti, M. Targeted Drug Delivery and Imaging Using Mobile milli/microrobots: A promising future towards theranostic pharmaceutical design. Curr. Pharm. Des. 2016, 22, 1418–1428. [Google Scholar] [CrossRef] [PubMed]
- Singh, A.V.; Sitti, M. Patterned and specific attachment of bacteria on biohybrid bacteria-driven microswimmers. Adv. Healthc. Mater. 2016, 5, 2325–2331. [Google Scholar] [CrossRef] [PubMed]
- Becker, B.C.; Yang, S.; MacLachlan, R.A.; Riviere, C.N. Towards vision-based control of a handheld micromanipulator for retinal cannulation in an eyeball phantom. In Proceedings of the 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012; pp. 44–49. [Google Scholar]
- Latt, W.T.; Tan, U.X.; Shee, C.Y.; Ang, W.T. A compact handheld active physiological tremor compensation instrument. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 711–716. [Google Scholar]
- Payne, C.J.; Kwok, K.; Yang, G. An ungrounded hand-held surgical device incorporating active constraints with force-feedback. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS’13), Tokyo, Japan, 3–7 November 2013; pp. 2559–2565. [Google Scholar]
- Chang, D.; Gu, G.M.; Kim, J. Design of a novel tremor suppression device using a linear delta manipulator for micromanipulation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS’13), Tokyo, Japan, 3–7 November 2013; pp. 413–418. [Google Scholar]
- Saxena, A.; Patel, R.V. An active handheld device for compensation of physiological tremor using an ionic polymer metallic composite actuator. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS’13), Tokyo, Japan, 3–7 November 2013; pp. 4275–4280. [Google Scholar]
- Kyeong, S.; Chang, D.; Kim, Y.; Gu, G.M.; Lee, S.; Jeong, S.; Kim, J. A hand-held micro surgical device for contact force regulation against involuntary movements. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 869–872. [Google Scholar]
- Cheon, G.W.; Lee, P.; Gonenc, B.; Gehlbach, P.L.; Kang, J.U. Active depth-guiding handheld micro-forceps for membranectomy based on CP-SSOCT. In Proceedings of the Optical Fibers and Sensors for Medical Diagnostics and Treatment Applications XVI, San Francisco, CA, USA, 13–18 February 2016; Volume 9702. [Google Scholar] [CrossRef]
- World First for Robot Eye Operation. Available online: http://www.ox.ac.uk/news/2016-09-12-world-first-robot-eye-operation (accessed on 22 September 2017).
- World First: Surgical Robot Performs Precision-Injection in Patient With Retinal Vein Occlusion. Available online: https://www.kuleuven.be/english/news/2017/surgical-eye-robot-performs-precision-injection-in-patient-with-retinal-vein-occlusion (accessed on 22 September 2017).
- Saito, H.; Togawa, T. Detection of needle puncture to blood vessel using puncture force measurement. Med. Biol. Eng. Comput. 2005, 43, 240–244. [Google Scholar] [CrossRef] [PubMed]
- Ergeneman, O.; Pokki, J.; Pocepcova, V.; Hall, H.; Abbott, J.J.; Nelson, B.J. Characterization of puncture forces for retinal vein cannulation. J. Med. Dev. 2011, 5, 044504. [Google Scholar] [CrossRef]
- Menciassi, A.; Eisinberg, A.; Scalari, G.; Anticoli, C.; Carrozza, M.; Dario, P. Force feedback-based microinstrument for measuring tissue properties and pulse in microsurgery. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Zhang, X. Silicon microsurgery-force sensor based on diffractive optical MEMS encoders. Sens. Rev. 2004, 24, 37–41. [Google Scholar] [CrossRef]
- Peirs, J.; Clijnen, J.; Reynaerts, D.; Van Brussel, H.; Herijgers, P.; Corteville, B.; Boone, S. A micro optical force sensor for force feedback during minimally invasive robotic surgery. Sens. Actuators A Phys. 2004, 115, 447–455. [Google Scholar] [CrossRef]
- Puangmali, P.; Liu, H.; Seneviratne, L.D.; Dasgupta, P.; Althoefer, K. Miniature 3-axis distal force sensor for minimally invasive surgical palpation. IEEE/ASME Trans. Mechatron. 2012, 17, 646–656. [Google Scholar] [CrossRef]
- Seibold, U.; Kubler, B.; Hirzinger, G. Prototype of instrument for minimally invasive surgery with 6-axis force sensing capability. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Bell, B.; Stankowski, S.; Moser, B.; Oliva, V.; Stieger, C.; Nolte, L.-P.; Caversaccio, M.; Weber, S. Integrating optical fiber force sensors into microforceps for ORL microsurgery. In Proceedings of the IEEE Engineering in Medicine and Biology Society, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 1848–1851. [Google Scholar]
- Gu, G.M.; Shin, Y.K.; Son, J.; Kim, J. Design and characterization of a photo-sensor based force measurement unit (FMU). Sens. Actuators A Phys. 2012, 182, 49–56. [Google Scholar] [CrossRef]
- Zareinia, K.; Maddahi, Y.; Gan, L.S.; Ghasemloonia, A.; Lama, S.; Sugiyama, T.; Yang, F.W.; Sutherland, G.R. A Force-Sensing Bipolar Forceps to Quantify Tool-Tissue Interaction Forces in Microsurgery. IEEE/ASME Trans. Mechatron. 2016, 21, 2365–2377. [Google Scholar] [CrossRef]
- Berkelman, P.J.; Whitcomb, L.L.; Taylor, R.H.; Jensen, P. A miniature microsurgical instrument tip force sensor for enhanced force feedback during robot-assisted manipulation. IEEE Trans. Robot. Autom. 2003, 19, 917–921. [Google Scholar] [CrossRef]
- Jagtap, A.S.; Riviere, C.N. Applied force during vitreoretinal microsurgery with handheld instruments. In Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 1–5 September 2004; pp. 2771–2773. [Google Scholar]
- Iordachita, I.; Sun, Z.; Balicki, M.; Kang, J.; Phee, S.; Handa, J.; Gehlbach, P.; Taylor, R. A sub-millimetric, 0.25 mN resolution fully integrated fiber-optic force-sensing tool for retinal microsurgery. Int. J. Comput. Assist. Radiol. Surg. 2009, 4, 383–390. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Balicki, M.A.; Kang, J.U.; Gehlbach, P.L.; Handa, J.T.; Taylor, R.H.; Iordachita, I.I. Force sensing micro-forceps with integrated fiber bragg grating for vitreoretinal surgery. In Proceedings of the Optical Fibers and Sensors for Medical Diagnostics and Treatment Applications XII, San Francisco, CA, USA, 1–7 February 2012; Volume 8218. [Google Scholar]
- Kuru, I.; Gonenc, B.; Balicki, M.; Handa, J.; Gehlbach, P.; Taylor, R.H.; Iordachita, I. Force sensing micro-forceps for robot assisted retinal surgery. In Proceedings of the International Conference of the IEEE EMBS (EMBC ’12), San Diego, CA, USA, 28 August–1 September 2012; pp. 1401–1404. [Google Scholar]
- Gonenc, B.; Feldman, E.; Gehlbach, P.; Handa, J.; Taylor, R.H.; Iordachita, I. Towards robot-assisted vitreoretinal surgery: Force-sensing micro-forceps integrated with a handheld micromanipulator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’14), Hong Kong, China, 31 May–7 June 2014; pp. 1399–1404. [Google Scholar]
- Gonenc, B.; Tran, N.; Riviere, C.N.; Gehlbach, P.; Taylor, R.H.; Iordachita, I. Force-based puncture detection and active position holding for assisted retinal vein cannulation. In Proceedings of the International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI’15), San Diego, CA, USA, 14–16 September 2015; pp. 322–327. [Google Scholar]
- Romano, M.R.; Romano, V.; Mauro, A.; Angi, M.; Costagliola, C.; Ambrosone, L. The effect of temperature changes in vitreoretinal surgery. Transl. Vis. Sci. Technol. 2016, 5. [Google Scholar] [CrossRef] [PubMed]
- Gonenc, B.; Gehlbach, P.; Taylor, R.H.; Iordachita, I. Effects of micro-vibratory modulation during robot-assisted membrane peeling. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’15), Hamburg, Germany, 28 September–2 October 2015; pp. 3811–3816. [Google Scholar]
- Gupta, A.; Gonenc, B.; Balicki, M.; Olds, K.; Handa, J.; Gehlbach, P.; Taylor, R.H.; Iordachita, I. Human eye phantom for developing computer and robot-assisted epiretinal membrane peeling. In Proceedings of the International Conference of the IEEE EMBS (EMBC’14), Chicago, IL, USA, 26–30 August 2014; pp. 6864–6867. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Before Puncture | At the Instant of Puncture | |
|---|---|---|
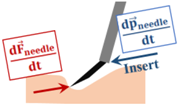 |  | 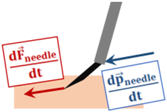 |
| Puncture Criterion | Force-Based Method | Force-and-Position-Based Method | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Detected the Actual Puncture | False Detection Before Puncture | False Detection After Puncture | Detected the Actual Puncture | False Detection Before Puncture | False Detection After Puncture | Detected the Actual Puncture | False Detection Before Puncture | False Detection After Puncture | |
| User 1 | 100% | 0% | 8% | 100% | 0% | 83% | 100% | 0% | 46% |
| User 2 | 67% | 0% | 17% | 88% | 13% | 63% | 100% | 0% | 50% |
| MEAN | STD. | MIN. | MAX. | MEAN | STD. | MIN. | MAX. | MEAN | STD. | MIN. | MAX. | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| User 1 | 10.46 | 1.70 | 7.68 | 12.09 | −49.48 | 15.75 | −78.31 | −26.14 | 7.08 × 104 | 4.18 × 104 | 1.53 × 104 | 1.34 × 105 |
| User 2 | 11.66 | 6.90 | 4.55 | 22.45 | −67.47 | 34.35 | −141.20 | −19.67 | 2.07 × 105 | 1.61× 105 | 8.75 × 103 | 7.21 × 105 |
| User 3 | 8.74 | 1.70 | 6.51 | 13.02 | −51.37 | 16.06 | −89.21 | −29.83 | 8.17 × 104 | 4.53 × 104 | 2.62 × 104 | 1.69 × 105 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonenc, B.; Chae, J.; Gehlbach, P.; Taylor, R.H.; Iordachita, I. Towards Robot-Assisted Retinal Vein Cannulation: A Motorized Force-Sensing Microneedle Integrated with a Handheld Micromanipulator †. Sensors 2017, 17, 2195. https://doi.org/10.3390/s17102195
Gonenc B, Chae J, Gehlbach P, Taylor RH, Iordachita I. Towards Robot-Assisted Retinal Vein Cannulation: A Motorized Force-Sensing Microneedle Integrated with a Handheld Micromanipulator †. Sensors. 2017; 17(10):2195. https://doi.org/10.3390/s17102195
Chicago/Turabian StyleGonenc, Berk, Jeremy Chae, Peter Gehlbach, Russell H. Taylor, and Iulian Iordachita. 2017. "Towards Robot-Assisted Retinal Vein Cannulation: A Motorized Force-Sensing Microneedle Integrated with a Handheld Micromanipulator †" Sensors 17, no. 10: 2195. https://doi.org/10.3390/s17102195