A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation


College of Information Technology, Shanghai Ocean University, Shanghai 201306, China
*
Author to whom correspondence should be addressed.
Sensors 2017, 17(10), 2168; https://doi.org/10.3390/s17102168
Submission received: 12 July 2017
/
Revised: 25 August 2017
/
Accepted: 15 September 2017
/
Published: 21 September 2017
(This article belongs to the Special Issue Marine Sensing)
Abstract
:Existing marine sensor networks acquire data from sea areas that are geographically divided, and store the data independently in their affiliated sea area data centers. In the case of marine events across multiple sea areas, the current network structure needs to retrieve data from multiple data centers, and thus severely affects real-time decision making. In this study, in order to provide a fast data retrieval service for a marine sensor network, we use all the marine sensors as the vertices, establish the edge based on marine events, and abstract the marine sensor network as a graph. Then, we construct a multi-objective balanced partition method to partition the abstract graph into multiple regions and store them in the cloud computing platform. This method effectively increases the correlation of the sensors and decreases the retrieval cost. On this basis, an incremental optimization strategy is designed to dynamically optimize existing partitions when new sensors are added into the network. Experimental results show that the proposed method can achieve the optimal layout for distributed storage in the process of disaster data retrieval in the China Sea area, and effectively optimize the result of partitions when new buoys are deployed, which eventually will provide efficient data access service for marine events.
1. Introduction
Marine sensor networks have become an important research field with the increasing global emphasis on marine rights and the marine economy. Marine sensor networks consist of various types of data acquisition equipment, such as buoys, subsurface buoys and voluntary observing ships. For example, in the famous Argo program [1], 12,081 buoys have been deployed in the ocean around the world since 1999, producing a huge amount of data stored by its affiliated data centers. These data provide the basic support for marine scientific research. Nevertheless, when dealing with marine events in multiple sea areas, this kind of storage method takes a long time to retrieve the data and affects real-time decision making, resulting in delays in emergency disaster prevention and rescue. It may even cause significant casualties and property loss.
Typhoons are typical marine events, the historical typhoon data since 1949 show that the main typhoons of the Chinese coastal areas land from the southern sea area of Taiwan and travel across several sea areas, including the East China Sea and the Philippine Sea [2]. When data are retrieved, common storage methods require access to multiple data centers, resulting in frequent data transmission and increasing communication cost. It also spawns some data processing problems such as scattered data, long retrieval time and low joining efficiency. Therefore, we need an optimal storage strategy that can support fast retrieval. A basic idea is to store data based on the relevance of ocean events. On the other hand, the highly correlated data is stored in the same node, reducing the cost of data retrieval. Nevertheless, the main difficulties of this data storage idea include two aspects: (1) data for different events have different degrees of correlation, and thus different data layouts can be drawn; (2) when new devices are deployed in the marine sensor network, the existing partition system needs to be updated.
In this paper, we first abstract the marine sensor network composed of all Argo buoys in the Chinese Sea area into Argo-buoys graph (AB-Graph), and use it as the main experimental object. Exploring the correlation of the buoys during previous disaster events is calculated to represent the edge weight of the AB-graph, we use the typhoon data of China’s coastal areas from 2000 to 2017. Then, we construct a multi-objective balanced partition method for AB-Graph, which divides the AB-Graph into multiple regions for efficient data storage and retrieval. AB-Graph partition principles are: maximizing the correlation of the buoy in the regions, minimizing the correlation of inter-regions, minimizing the communication time of inter-region and balancing the size of regions. Those principles aim to achieve an optimal layout for marine sensor network. This part of work has been published in the 2017 IEEE International Conference on Networking, Sensing and Control [3]. Furthermore, all kinds of new observation equipment are often deployed in the ocean. In order to deal with this situation effectively, this paper proposes an incremental optimization strategy, which can dynamically optimize the existing partition. Although our experiments are based on the Argo-buoy sensor network, the proposed method can be extended to a comprehensive marine sensor network with various types of sensors. For events across a number of sea areas, the method not only provides effective data retrieval for the relevant data calculation and analysis, but also continuously improves the quality of partition. It will help marine activities formulate decisions for disaster prevention quickly and enhance the safeguarding ability.
In this paper, Section 2 reviews and compares related work in graph partitioning and dynamic processing methods. Section 3 defines the AB-Graph and multi-objectives problems, and proposes a multi-objective balanced partition method based on NSGA-II. Section 4 introduces an incremental optimization strategy for post-partitioned AB-Graph. Section 5 presents four aspects of our experimental results. Finally, the paper is concluded in Section 6.
2. Related Work
With the rapid development of various marine sensing equipment, marine sensor networks can collect global ocean temperature, salinity, humidity and other information, which is widely used in marine event analysis, marine phenomena detection and other scientific research. Some researchers have built large-scale ocean data information systems to manage sensor data from storage equipment, storage environment, and data transmission [4,5,6,7], but they rarely consider the data storage methods so these methods take a long time for data retrieval. Novell and Palazov et al. [8,9] applied WMS service to provide near real-time retrieval to historical data for single-point access. However, they didn’t consider the relationship of sensors in the data management. Hedde et al. [10,11] computed the space-time correlation of sensor to manage complex wireless sensor networks. Meyerhenke et al. [12] used the graph partitioning method to divide the graph and then store it, effectively shortening the retrieval time. Taking the sensor correlation into consideration, Graph-based data storage strategies could enhance the efficiency of data retrieval. Therefore, this paper adopts the graph partitioning technology to process the marine sensor network data.
Graph partitioning can be used to cluster complex edge relations according to the correlation of vertices. In some data layout studies, a good graph partitioning algorithm can provide the basis for this. Common single-objective partitioning methods have used clustering algorithms and multi-level partitioning methods [12,13,14,15], but these methods might not give the best results [12,16]. Therefore, Damico et al. [17] proposed a single-objective simulated annealing algorithm (SA) for the police management problem in Buffalo (NY, USA). The method can help the police find the best patrol route and get high-quality solutions in the original graph. Rahimian et al. [16] firstly proposed a distributed graph partition algorithm, Ja-be-Ja1, which achieved better partition quality compared to METIS [18]. Later, some researchers used the vertex-cut partitioning of the large graphs by the parallel and distributed algorithm to optimize Ja-be-Ja1, named Ja-be-Ja-vc, which improved operation efficiency and performance in graph partitioning [19,20]. Compared with the hash partition, a graph partitioning method divided the graph using balanced label propagation and vertex migration strategies [21], which significantly reduced the execution time by more than 50% [22]. Nevertheless, the aforementioned single-objective partitioning methods had difficulty in meeting some practical needs in the production environment.
Multi-objective graph partitioning (MOGP) has been widely used in various fields, taking into account the impact of multiple factors on the graph and improving some objectives without reducing other objectives. MOGP methods are implemented using various multi-objective heuristic algorithms (MHA) [23,24]. Schloegel et al. [25] proposed a new formulation of the multi-objective graph partitioning problem, and designed an algorithm to compute partitioning with this formulation. This algorithm can handle similar and dissimilar objectives, finding a good tradeoff result, but it is highly sensitive to predetermined preference factors when forming integrated weights. In order to produce the solution in which both the cut and the maximum subdomain degree are simultaneously minimized, Selvakkumaran [26] proposed a family of multi-objective hypergraph partitioning algorithms, the maximum subdomain degree is reduced by up to 36% when compared with hMETIS [27]. Galvão et al. [28] proposed a multiplicatively-weighted Voronoi diagram (WVD) for treating the parcel delivery, and the experiment showed better results in both balanced time/capacity utilization. Jia et al. [29] combined Laplacian spectrum and self-organising map to propose a multi-objective power network partitioning approach, which obtained minimal intra-area real power imbalance with a healthy voltage profile. However the above methods have difficulty in performing fine-tuned control of tradeoffs among the objectives.
Some researchers have used multi-objective genetic algorithms to divide the graphs to find the optimal results [30,31,32]. They suggested that the graph partitioning should maximize the relation in the inner-subgraph and minimize the relation of the subgraphs. In order to improve the existing health care system in Parana (Brazil), the non-dominant sorting genetic algorithm (NSGA-II) has been used to distribute the medical institutions, and the experiment has proved that it has a good partitioning effect in the medical field [33]. NSGA-II [33] can design different operators for different fields, which has high scalability and it is easy to obtain high-quality solutions, but these static methods often take a lot of time to recalculate when the vertices or edges of the graph happen to change. Traditional dynamic processing methods generally use vertex migration strategies, such as the dynamic Mizan algorithm [34] mainly used to load balancing, and the xDGP algorithm [35] used to reduce the number of edge cuts. Similar strategies include the CANDS algorithm [36] and X-pregel algorithm for traffic networks [37]. Vaquero et al. [38] proposed an iterative vertex migration algorithm that only requires local information to reduce the execution time [22], which is suitable for scenarios where a large number of graph data changes exists. These mature multi-objective partition methods are widely used in the transportation, medical care, power grids, and other fields [19,32,39], but none of them has been used in data management for marine sensing networks. Therefore, this paper first proposes a multi-objective balanced partition method based on NSGA-II for marine sensor networks, which can maximize the correlation of sensors in the region, minimize the correlation of regions, minimize the communication time of inter-region, and balance the size of regions. This static method provides a basic storage method for sensing data. Then, we construct an incremental optimization strategy-based vertex migration to continuously optimize the results. Compared with other state-of-the-art graph and hypergraph partitioning methods such as MHP and WVD, our proposed method can easily obtain high-quality feasible solutions in large-size real-world situations and has a faster convergence speed. Typically, it can easily take fine-tuned controls among multiple objectives and get different priorities of the solution by user tendency. Facing complex environmental changes in marine sensor networks, the method can quickly give new partitioning results without significant degradation. It will provide fast and efficient data access service for time-changing ocean events.
3. Multi-Objective Balanced Partition Method for AB-Graph Based on NSGA-II
The workflow of the proposed method includes four parts (Figure 1). We describe the first three parts of workflow in this section. In Section 3.1, we define AB-Graph based on marine sensor network, and the multi-objective problems of marine sensor network are formulated. In Section 3.2, Section 3.3, Section 3.4 and Section 3.5, we describle a multi-objective partition method based on NSGA-II for AB-Graph. The last part of the workflow will be described in Section 4.
3.1. Construction of AB-Graph and Formulation of Multi-Objective Problems
3.1.1. Construction of AB-Graph
In this paper, the marine sensor network composed of all Argo buoys in China Sea area is abstracted as an Argo-buoys graph (AB-Graph). AB-Graph is an undirected graph, where is a set of Argo vertices (buoys) in AB-Graph, and is a set of edges with as the edge between buoys and . For more detailed information please refer to [3]. In the AB-Graph balanced partition problem, we design three objective functions and six constraints to divide the Argo buoys of the Chinese sea area into regions and get the best way to store them. Table 1 shows the general notations used in this paper.
regions should be non-empty and non-intersecting, where is the subset of vertices in the AB-Graph at the region. Table 2 lists the six constraints that partitioning the AB-Graph should meet.
3.1.2. Formulation of Multi-Objective Functions
We design three objective functions to partition the AB-Graph. The objectives 1 and 2make the buoy of each region in the AB-Graph more close, i.e., the buoy with high correlation can be divided into the same region. Objective c controls the communication time cost by minimizing the number of regions involved in marine events.
1. Minimizing correlation of the buoys in the regions
The edge weight of the AB-Graph represents the degree of correlation between the two buoys. The sum of the edge weights in each region represents the correlation of the buoys in the region. When the sum of the edge weights of all regions reaches the maximum, the relationship of buoys is the closest in the AB-Graph, as shown in Equation (1):
where represents the edge weight between and , the correlation of buoys in this region is most closely related to the maximization of the weight of the region. represents the sum of edge weights in the region .
2. Minimizing the correlation of the buoys in inter-regions
Minimizing the correlation of inter-regions, i.e., the correlation within each region is maximized, and the sum of the weights of buoys within all regions is maximized. Therefore, this objective can also be achieved by Equation (1).
3. Minimizing the communication time of inter-regions
Communication cost of nodes is the same in the cloud platform, so the communication cost is mainly affected by the number of regions required for retrieval. We minimize the communication time of inter-regions by minimizing the average number of regions required for typhoon retrieval under this partition as shown in Equation (2):
where indicates the communication time of the user accessing a single region in the cloud platform.
Through the above definition and description, we will construct a multi-objective balanced partition method based on NSGA-II. It consists mainly of four steps. First of all, we construct a unique representation and initialization method for AB-Graph, and then fill the mating pool with the binary tournament algorithm. Furthermore, we design a special selection, crossover and mutation operator for AB-Graph. Finally, we use the elite preservation mechanism of NSGA-II to preserve the optimal solution in each generation [33]. Each operator is described in Section 3.2, Section 3.3, Section 3.4 and Section 3.5.
3.2. Individual Representation and Initialization
It is difficult to obtain a feasible solution by using the traditional method of random assignment when initializing the individual (solution). In this paper, we use an array of elements to represent the individual of the genetic algorithm, where the position of the elements in the array represents the serial number of the Argo buoy, and the value of the element represents the serial number of the region to which the buoy belongs. Then we design a greedy algorithm that is suitable for the marine sensor network, which is used to initialize the individuals that meet the constraints in Section 3.1.
The decomposition algorithm is shown in Algorithm 1. The computing complexity is for extracting vertex from the vertex set and for traversing vertex and filling region. Thus, the complexity of Algorithm 1 is .
| Algorithm 1: Individual initialization algorithm |
| Input: Argo buoys in AB-Graph; The number of regions ; Maximum size of region Output: Individual of the population 1: The initial buoys are randomly selected and the value of the buoy in is set to ; 2: while (All the buoys belong to a certain region) 3: if (The last round has successfully added the buoy to the region) 4: for (Each region ) 5: if (A vertex , not belonging to any region, is connected to a vertex in and )) 6: Set the value of in the individual to be ; 7: end if 8: end for 9: else 10: for (Each region ) 11: if ( is not assigned and ) 12: Set the value of the buoy in the individual to be ; 13: end if 14: end for 15: end while 16: return |
3.3. Selection Operation
The selection operation algorithm is mainly based on the binary tournament algorithm. We judge the merits and demerits of the individual in the population through non-dominated sorting method [27]. The size of non-dominated level reflects the convergence of the solution, and the crowding distance reflects the diversity of the solution. Solution is better than solution , if and only if Equation (3) is satisfied:
where represents the non-dominance level of solution , represents crowding distance of solution . The selection operation algorithm takes two solutions (individuals) from the population and selects a solution with high convergence and diversity to fill the mating pool. This process is repeated until the mating pool reaches its predefined size, which is usually the same size as the population size. The time complexity of the fast non-dominated sorting is , and extended mating pool is , so the time complexity of this algorithm is .
3.4. Cross Operation
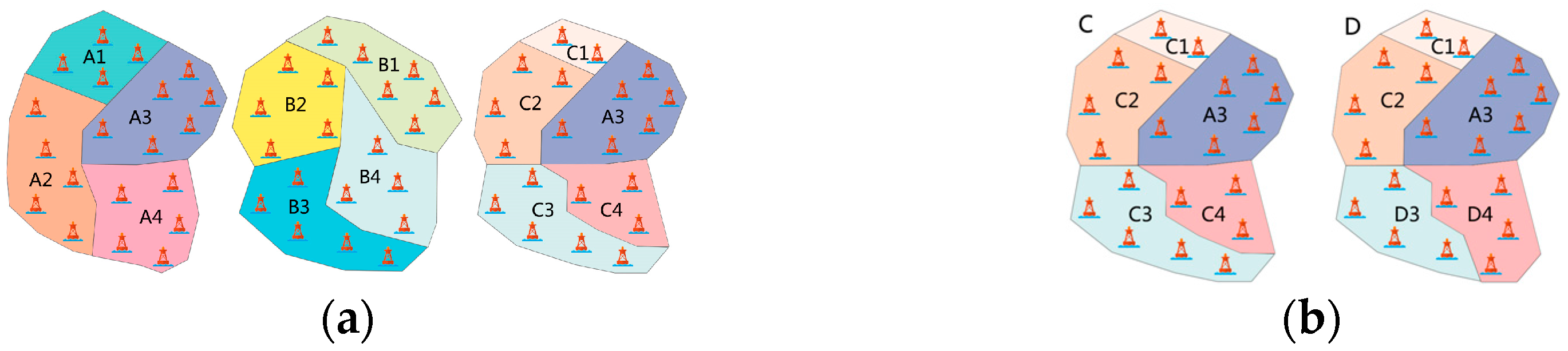
When performing cross operation on individuals in the AB-Graph, we randomly select two individuals from the mating pool, select a certain region from a solution, copy and replace it into another solution, finally generate a new solution (descendant). Then we re-label the regions of the new solution, to prevent the overlapping within solution. As shown in Figure 2a, we assume that there are 20 buoys of the two solutions as parent A and parent B, which are labeled with four regions A1–A4, B1–B4, respectively. When the cross operation is executed, A3 in parent A is randomly selected to insert into parent B to generate a new solution. Since all the regions in B have A3 in common, the regions of new descendant are labeled as C1, A3, C2, C3, C4.
The decomposition algorithm is shown in Algorithm 2, where the time complexity of selecting two solutions randomly from the mating pool is , region replacement is , and re-labelling new solution is . So the time complexity of this algorithm is .
| Algorithm 2: Cross operation algorithm for AB-Graph |
| Input: Mating pool Output: Next-generation individual 1: Two individuals and are randomly selected in 2: Randomly select a certain region in solution , and replace the value of the position of the region in as the value in the . The new solution is saved as a new individual 3: The new individual generated in 2 is re-labeled. It is judged whether the buoys in the same region are connected with each other, and if they are not connected, which will be labeled as a new region. 4: return |
3.5. Mutation Operation
The principle of the mutation operator for AB-Graph’s individual is to randomly select some boundary buoys in a certain region and transfer each of them to another adjacent region, and then the original individual becomes a new individual without violating the constraints of Section 3.1. As shown in Figure 2b, the boundary buoy of C3 in individual C is transferred to its adjacent region C4, reducing the size of C3 but increasing the size of C4. Finally, all the regions that have changed are re-marked as D3, D4, resulting in a new individual D. The decomposition algorithm is shown in Algorithm 3 which has the time complexity of .
| Algorithm 3: Mutation operation algorithm for AB-Graph |
| Input: Individual Output: Individual 1: Randomly select some border buoys belonging to one region in ; 2: for ( in ) 3: if ( and and ) 4: The buoy is transferred to the region to which belongs; 5: end if 6: end for 7: Re-label the affected region; 8: return |
Finally, we apply the elite preservation strategy to NSGA-II [33], which can speed up the convergence rate of the algorithm and enhance the computing performance while retaining the outstanding solutions of each generation.
4. Incremental Optimization Strategy for the Post-Partitioned AB-Graph
Various types of sensors exist in the new deployment and decommissioning situation in the marine sensor network. After the buoy is deployed, its historical data needs to be retained, so AB-Graph is a typical incremental graph. This section only considers the increase of the buoys, and constructs the incremental optimization strategy for the post-partitioned AB-Graph by Section 4. This is divided into two steps: firstly, the expression factor of correlation between each buoy and each region is calculated by using the historical data of typhoon to indicate relationship of them; secondly, the incremental optimization algorithm for the post-partitioned AB-Graph is constructed to deal with the increasing change of buoys in the original partition of AB-Graph.
4.1. Expression Factor of the Correlation between Buoy and Region
In this paper, when a new buoy is added to AB-Graph, the expression factor of correlation is used to calculate the initial region, which is defined as follows:
Definition 1.
The expression factor of correlation between the buoy and the region , where indicates whether the buoy is under the influence of the typhoon. If , the buoy is affected by the typhoon, and vice versa when . If the value of is closer to 1, the correlation of the buoy and the region is more closely.
4.2. Incremental Optimization Algorithm
AB-Graph’s incremental optimization algorithm consists of two parts. Firstly, according to Section 5.1, we calculate the correlation factor between the new buoy and the existing regions by definition 3, and then deploy it in the highest correlation region and fill the adjacent weight information. Secondly, we need to determine whether placing the new buoy into the AB-Graph will destroy the existing constraints of the partition. There are three cases: (1) when the new buoy is placed in a certain region in AB-Graph, the size of the region is larger than the pre-defined size, and there are other regions with spare size, then the existing partition is adjusted by vertex migration; (2) when the new buoy is placed in a certain region in AB-Graph, the size of the region is larger than the pre-defined size and the other regions are full, then the pre-defined size is expanded; (3) when the new buoy is placed in a certain region in AB-Graph, the size of the region is not larger than the pre-defined size, and it is directly placed in the region. Through the above three cases, our method satisfies the initial partitioning constraints and adapts to the influence of the change of the buoy on the existing partition, which improves the quality of partitioning result and limits the degree of degradation of the incremental optimization algorithm.
The decomposition algorithm is shown in Algorithm 4. Since the time complexity of the calculating expression factor is , performing the vertex migration method is , and Algorithm 3 has a time complexity of .
| Algorithm 4: Incremental optimization algorithm for the post-partitioned AB-Graph |
| Input: Post-partitioned AB-Graph ; Set of new-added buoy ; Maximum size of region Output: Optimized 1: for(Each buoy in ) 2: for (Each region ) 3: Calculate the value when belongs by Definition 3; 4: end for 5: The buoy is placed in the region which has the maximum value , and expand its edge weight information; 6: if( and other regions with spare size) 7: Find the buoy with the smallest ; 8: for (Each region ) 9: if () 10: Calculate by Definition 1; 11: end if 12: end for 13: Place into the region with the maximum ; 14: else if ( and other regions are full) 15: Expand the value of ; 16: else if (() 17: Maintain the existing partitions. 18: end if 19: end for |
5. Experiment
In order to evaluate our proposed method, this section first introduces the data and environment used in the experiment. Then, the changes of multi-objective balanced partition method are tested with varying population size, number of regions, quality of partitioning and running time. Thirdly, the performance of the multi-objective balanced partition method is compared with the traditional genetic algorithms and NSGA, and we analyze the effect of proposed method in different size of event data. Then, we compare the effects of incremental optimization strategies and other strategies. Finally, the performance of the method is evaluated.
5.1. Experimental Data and Environment
410 typhoon datasets were selected from the Typhoon Network [2] in 2000–2017. The 1.5 GB buoy data from China’s coastal is obtained from the Argo Real-Time Data Center [1]. Table 3 illustrates some examples of the typhoon data attributes.
Our experiments run on the cloud computing platform Spark 2.1.1. We build eight nodes as the storage sites for the partitioned regions. The communication between the nodes is through 10 Gigabit Ethernet.
5.2. The Partition Quality and Running Time by Different Population Size and Number of Regions
We build an AB-Graph with 53 vertices, 233 edges, and the sum of edge weights is 507. First, we test the number of iterations and find that when the number of iterations reaches 100, all populations have converged, so the maximum number of iterations in this experiment is no more than 100. Then according to the statistical analysis, we set the population size to 20, 50, 100, and the number of partitioning regions sets to 4–8. The degree of correlation of the buoys in the region is determined by the ratio :
In Equation (4), is the total edge weights of the AB graph. and is the sum of the preserving edge weights in all regions. That the larger value of is and the smaller the number of edges to be partitioned, indicates the higher the quality of the solution, and vice versa. It can be seen from Table 4 that with the increase of the population size, the overall quality of the partition is improved, indicating that the algorithm can more easily get high-quality solutions when the population size is larger. If the population size is 100, the number of regions is 4, the highest is 73.17%, which is 2.17% higher than the lowest, but its running time reached 24,479.152 ms, which is 6.01 and 2.8 times the running time when the population size is 20 and 50, respectively. This is because that when the population size increases, the algorithm needs to spend more time on initializing the individuals and filling the mating pool. In addition, according to Table 4, the running time of the algorithm decreases with the increase of the number of regions, which shows that the algorithm is more easily to converge and find the optimal solution as the number of regions increases.
5.3. Performance of the Proposed Method
In the experiment, we fix the population size as 100, divide the AB-Graph into four regions, and select all typhoon data from 2010 to 2017. The performance of the multi-objective balanced partition method is compared from two aspects. First, the proposed method compares with the traditional single-objective algorithm (SOGA), it can be seen from Table 5 that SOGA has obtained the highest quality solution 76.13% in , indicating that only 23.87% edge weights are partitioned, and the buoys of AB-Graph are closely related in the region, but its communication time across the region reached 153.34 ms. On the contrary, SOGA in can still get the optimal solution 121.21 ms, but its values is low, not satisfying our experimental expectations. Then, compared with the non-dominated sorting genetic algorithm (NSGA), the solution obtained by NSGA-II in this paper is 11.64% higher than NSGA solution in , and 4.14% in . It is shown that the method proposed in this paper reduces the communication time across the region and significantly improves the correlation of buoys in the AB-Graph, meeting the expected original objectives of the experiment.
The result of the optimal solution obtained in this paper is shown in Figure 3. All dots in the figure indicate 53 buoys in AB-Graph, and four colors of the vertices represent different regions, and the different colors of lines reflect the size of the edge weight.
We conduct further experiments to study the impact of data size on the performance of the proposed algorithm. We select 140 typhoon data from 2010 to 2015 as the basic event data and increase five typhoon data every time until 2017, and test the changes in the quality of the division. The experimental results are shown in Table 6.
It can be seen from Table 6 that the is slightly changed with the gradually increasing typhoons. Overall, with a large amount of event data, the method more easily obtains a high quality partition result, but the obviously decreases with the increase of typhoons, this is mainly due to the fact that the less the event data amount is, the simpler the structure of the AB-Graph is, and the shorter the communication time across the region is.
5.4. Effect Analysis of Incremental Optimization Strategy of Post-Partitioned AB-Graph
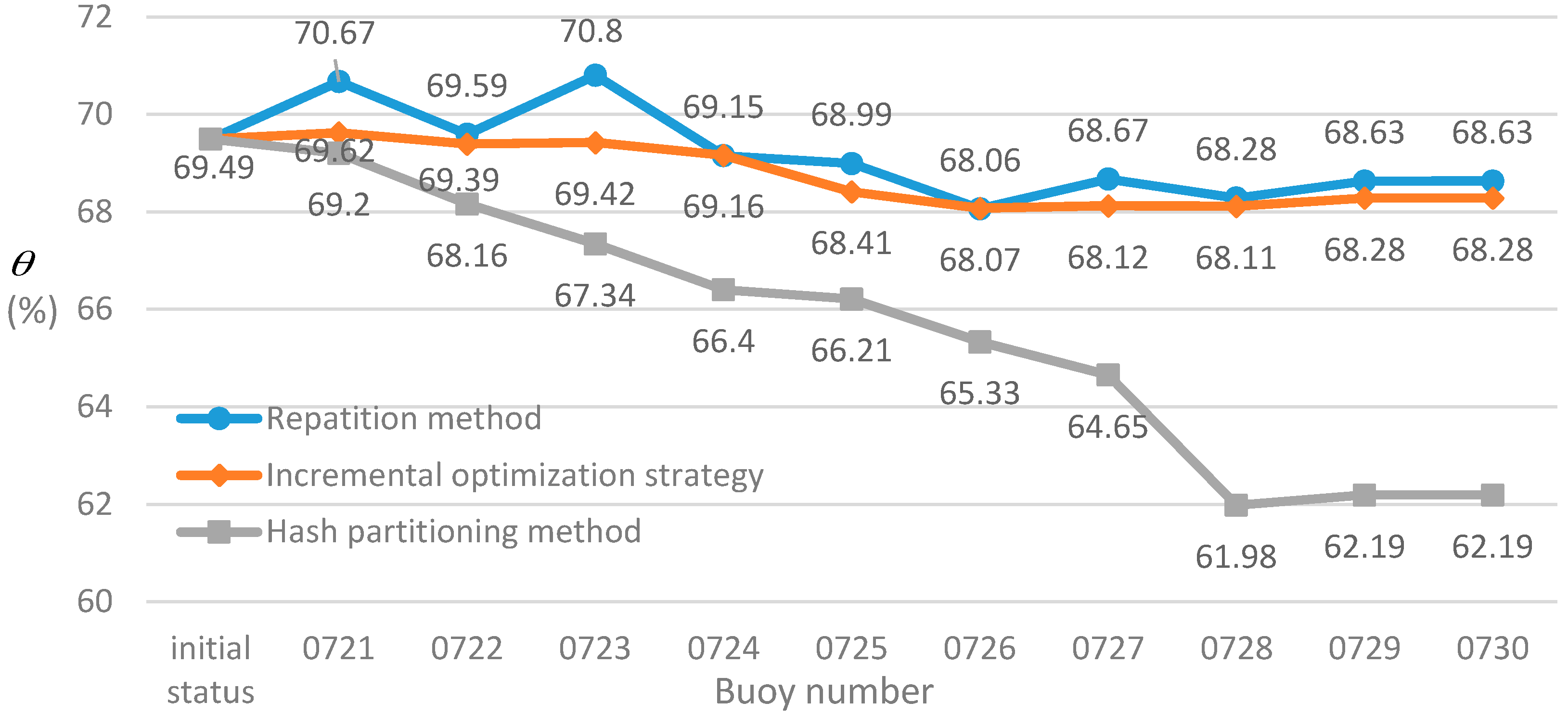
The experiment sets the population size to 100, the number of regions is set to 4, and selects all typhoon data from 2014 to 2016. Under this condition, the optimal solution is obtained by the multi-objective balanced partition method in Section 3, where the is 69.49% and the is 125.91 ms. On this basis, we compare incremental optimization strategy with a hash partitioning method and repartition method in three aspects: , and running time, analyzing the effect of incremental optimization strategy.
First of all, we examine the effect of three processing methods in after new buoys are added to the AB-Graph, as shown in Figure 4. Currently, the AB-Graph has a total of 53 vertices. In order to limit the influence of the number of new added buoys on original graph, 20% of the total buoys are randomly generated in the Chinese sea area.
It can be seen from Figure 4 that the hash partitioning method is less concerned with the correlation of the existing AB-Graph vertices when the number of buoys increases, has a serious degradation. In the “0728” buoy placed, it reaches a minimum value of 61.98%, which is 7.51% lower than the initial state. The incremental optimization strategy proposed in this paper increases with the buoys which finds that is fluctuating around 68.68% and the trend is stable. When the “0721”, “0723”, “0727” and “0729” buoys are added to the graph, the starts to rise, indicating that the incremental optimization strategy can optimize the existing partition of the graph when adding new devices. The validity of the method is demonstrated. Compared with the repartition method, when the “0721”, “0723”, “0727”, “0729” buoys added to the graph a rebound is also produced. When the buoy number “0726” is placed into the AB-Graph, is only 0.01% difference, indicating that the incremental optimization strategy is similar to the repartition method on , and the result of incremental optimization strategy is reliable. Overall, the repartition method is only slightly higher than the incremental optimization strategy on the , which indicates that the incremental optimization strategy can be applied to accommodate the situation of changing buoy deployment..
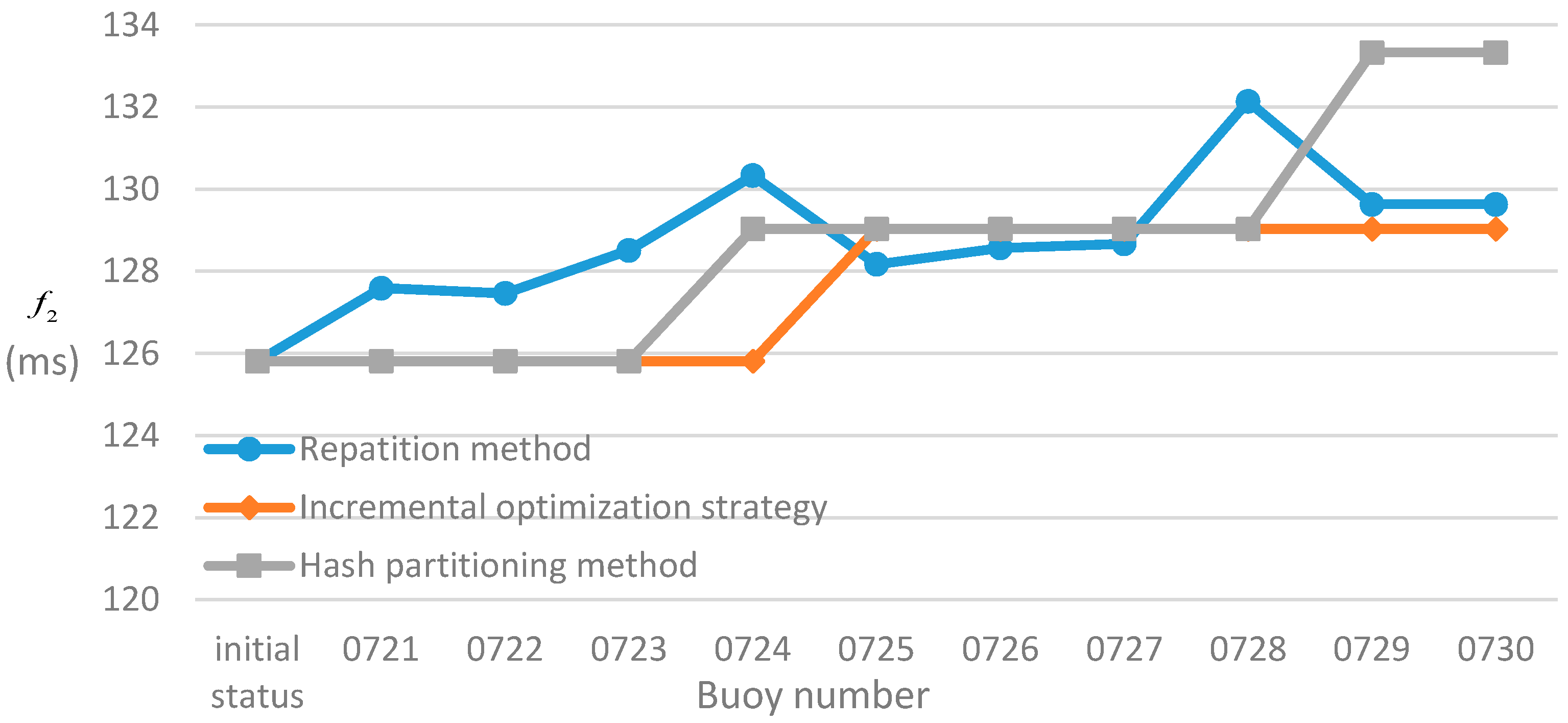
Secondly, the three methods are compared with regards to the (see Figure 5). It can be seen from Figure 5 when the “0724” and “0729” buoys are placed into the graph, those of the hash partitioning method increase to 129.03 ms and 133.33 ms, and those growth are obviously comparable with the incremental optimization strategy. For the repartition method, those of the repartition method produce a significant fluctuation as the buoys are added into the graph. This indicates that the repartition method has higher instability and frequent vertex migration, which increases the communication cost of the production environment. Compared with the other two methods, the incremental optimization strategy is stable and can improve the partition quality of the AB-Graph step by step, and effectively control the number of vertex migration.
Finally, given that the population size is 100 and AB-Graph is divided into four regions, when we add a new buoy to AB-Graph, the average running time of the incremental optimization strategy is 11.40 ms, and the running time of the repartition method is 21,314.70 ms due to the fact that needs to re-calculate all the buoys and regions. It may be considered that when a large number of buoys (e.g., 1900 buoys) are placed at the same time, the repartition method will take a similar running time with the incremental optimization strategy but get higher partition quality. However, it should be noted that the repartition method may cause large-scale vertex migration cost.
5.5. Verification of the Partitioning Effect
We set different sizes of event data to test the partitioning effect, the experimental environment is similar as in Section 5.3. We count the ratio of buoys stored in the same region when typhoons are retrieved to reflect the partitioning effect, the detailed results are shown in Table 7.
The value of always fluctuates around 59.71%, when the number of typhoons is 140 and 160, 145 and 150 have the same partitioning quality, indicating that the proposed method has high stability. The proposed method can provide a more stable optimal result for different sizes of marine events, and provide reliable support for data layout.
The best partition of the AB-Graph obtained in Section 5.3 is shown in Table 8. The sizes of the four regions are similar, indicating that the result of proposed method is balanced. In order to verify the partitioning effect, we choose 170 typhoon data for statistical analysis from 2010 to 2017. Experiments show that when typhoons are retrieved, all buoy data associated with 59.15% and 26.76% of the typhoons are stored in the same region and two regions, respectively, the others need to access three or more regions.
6. Conclusions
In this paper, firstly, we analyzed the multi-objective partitioning problem of marine sensor networks. Secondly, the Chinese Argo buoys are abstracted into an AB-Graph as the main experimental object. Thirdly, we constructed the various operators for AB-Graph based on NSGA-II and partition the AB-Graph. Finally, an incremental optimization strategy is proposed to ensure that the existing partitioning results are optimized at a low cost when the number of devices in the AB-Graph changes.
In the verification of the multi-objective balanced partition method, we showed that compared with the traditional genetic algorithms and NSGA, the proposed method significantly improves the correlation of the buoys in the region, and reduces the communication time of inter-regions. Then, in order to validate the partitioning effect, we assumed that 85.91% of the typhoons need to access only one or two regions during the retrieval and the size of each region is balanced, the results showed that the proposed method can provide fast and efficient data access services in marine events. In addition, when various types of observation equipment are deployed, the incremental optimization strategy, compared to the hash partitioning method and repartition method, quickly adjust the existing partition, getting high-quality results. The shortcoming of this study lies in the fact that the impact of buoy location changes on the partitioning and hypersensitivity of marine data are ignored. Future work will focus on dynamical buoy layouts, and data security of the cloud computing platform.
Acknowledgments
This work is supported by the National Natural Science Foundation of China (NSFC) Grant 41671431, the Program for Professor of Special Appointment (Eastern Scholar) at Shanghai Institutions of Higher Learning No. 2016038, and the Capacity Development for Local College Project Grant 15590501900.
Author Contributions
The work presented in this paper was a collaboration of all authors. Dongmei Huang and Danfeng Zhao conceived and designed the schemes; Chenyixuan Xu performed the experiments and wrote the paper; Wei Song and Qi He analyzed the data and gave advice for the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Argo.ucsd.edu. What Is Argo? Available online: http://www.argo.ucsd.edu/ (accessed on 15 October 2016).
- The Demonstrate of Typhoon. Available online: http://www.wztf121.com/ (accessed on 15 October 2016).
- Huang, D.M.; Xu, C.Y.X.; Zhao, D.F.; Song, W.; He, Q. Multi-objective Balanced Partitioning Method for Marine Sensor Network. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 586–592. [Google Scholar]
- Antonia, C.; Andrei, N. DAMAR: Information management system for marine data. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar]
- Aguzzi, J.; Mànuel, A.; Condal, F. The new Seafloor Observatory (OBSEA) for remote and long-term coastal ecosystem monitoring. Sensors 2011, 11, 5850–5872. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oh, J.S. Movement Monitoring System for Marine Buoy. J. Korea Inst. Inf. Commun. Eng. 2014, 18, 311–317. [Google Scholar] [CrossRef]
- Xu, G.; Shen, W.; Wang, X. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- Novellino, A.; D’Angelo, P.; Benedetti, G. European marine observation data network—EMODnet physics. In Proceedings of the 2014 IEEE/OES Baltic International Symposium (BALTIC), Tallinn, Estonia, 27–29 May 2015; pp. 1–6. [Google Scholar]
- Palazov, A.; Stefanov, A.; Marinova, V. Bulgarian National Operational Marine Observing System. In Proceedings of the 2012 Oceans-Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–9. [Google Scholar]
- Bosman, H.H.; Iacca, G.; Tejada, A. Ensembles of incremental learners to detect anomalies in ad hoc sensor networks. Ad Hoc Netw. 2015, 35, 14–36. [Google Scholar] [CrossRef]
- Bosman, H.H.; Iacca, G.; Tejada, A. Spatial anomaly detection in sensor networks using neighborhood information. Inf. Fusion 2017, 33, 41–56. [Google Scholar] [CrossRef]
- Meyerhenke, H.; Monien, B.; Schamberger, S. Graph partitioning and disturbed diffusion. Parallel Comput. 2009, 35, 544–569. [Google Scholar] [CrossRef]
- Spielman, D.A.; Teng, S.H. A local clustering algorithm for massive graphs and its application to nearly linear time graph partitioning. SIAM J. Comput. 2013, 42, 1–26. [Google Scholar] [CrossRef]
- Gehweiler, J.; Meyerhenke, H. A distributed diffusive heuristic for clustering a virtual P2P supercomputer. In Proceedings of the Parallel & Distributed Processing, Workshops and Phd Forum (IPDPSW), Atlanta, GA, USA, 19–23 April 2010; pp. 1–8. [Google Scholar]
- Karypis, G.; Kumar, V. A fast and high quality multilevel scheme for partitioning irregular graphs. SIAM J. Sci. Comput. 1998, 20, 359–392. [Google Scholar] [CrossRef]
- Rahimian, F.; Payberah, A.H.; Girdzijauskas, S.; Jelasity, M.; Haridi, S. Ja-be-ja: A distributed algorithm for balanced graph partitioning. In Proceedings of the Self-Adaptive and Self-Organizing Systems (SASO), Philadelphia, PA, USA, 9–13 September 2013; pp. 51–60. [Google Scholar]
- D’Amico, S.J.; Wang, S.J.; Batta, R.; Rump, C.M. A simulated annealing approach to police district design. Comput. Oper. Res. 2002, 29, 667–684. [Google Scholar] [CrossRef]
- Karypis, G.; Kumar, V.A. Parallel multilevel k-way partitioning scheme for irregular graphs. In Proceedings of the ACM/IEEE Conference on Supercomputing, Pittsburgh, PA, USA, 1 January 1996; p. 35. [Google Scholar]
- Rahimian, F.; Payberah, A.H.; Girdzijauskas, S.; Haridi, S. Distributed vertex-cut partitioning. In Proceedings of the IFIP International Conference on Distributed Applications and Interoperable Systems, Berlin, Germany, 3–5 June 2014; pp. 186–200. [Google Scholar]
- Carlini, E.; Dazzi, P.; Esposito, A.; Lulli, A.; Ricci, L. Balanced graph partitioning with apache spark. In Proceedings of the European Conference on Parallel Processing, Porto, Portugal, 25–29 August 2014; pp. 129–140. [Google Scholar]
- Ugander, J.; Backstrom, L. Balanced label propagation for partitioning massive graphs. In Proceedings of the Sixth ACM international Conference on Web Search and Data Mining, Rome, Italy, 4–8 February 2013; pp. 507–516. [Google Scholar]
- Stanton, I.; Kliot, G. Streaming graph partitioning for large distributed graphs. In Proceedings of the 18th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Beijing, China, 12–16 August 2012; pp. 1222–1230. [Google Scholar]
- Muyldermans, L.; Cattrysse, D.; Van Oudheusden, D.; Lotan, T. Districting for salt spreading operations. Eur. J. Oper. Res. 2002, 139, 521–532. [Google Scholar] [CrossRef]
- Soper, A.J.; Walshaw, C.; Cross, M. A combined evolutionary search and multilevel optimisation approach to graph-partitioning. J. Glob. Optim. 2004, 29, 225–241. [Google Scholar] [CrossRef]
- Schloegel, K.; Karypis, G.; Kumar, V. A new algorithm for multi-objective graph partitioning. Lect. Notes Comput. Sci. 1999, 1685, 322–331. [Google Scholar]
- Selvakkumaran, N.; Karypis, G. Multi-objective hypergraph partitioning algorithms for cut and maximum subdomain degree minimization. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2003, 25, 504–517. [Google Scholar] [CrossRef]
- Karypis, G.; Kumar, V. Hmetis 1.5: A Hypergraph Partitioning Package; Technical Report; Department of Computer Science, University of Minnesota: Minneapolis, MN, USA, 1998. [Google Scholar]
- Galvão, L.C.; Novaes, A.G.; De Cursi, J.S.; Souza, J.C. A multiplicatively-weighted Voronoi diagram approach to logistics districting. Comput. Oper. Res. 2006, 33, 93–114. [Google Scholar] [CrossRef]
- Jia, Y.; Lai, C.S.; Xu, Z.; Chai, S.; Wong, K.P. Adaptive partitioning approach to self-sustained smart grid. IET Gener. Transm. Distrib. 2017, 11, 485–494. [Google Scholar] [CrossRef]
- Bergey, P.K.; Ragsdale, C.T.; Hoskote, M. A decision support system for the electrical power districting problem. Decis. Support Syst. 2003, 36, 1–17. [Google Scholar] [CrossRef]
- Farshbaf, M.; Feizi-Derakhshi, M.R. Multi-objective optimization of graph partitioning using genetic algorithms. In Proceedings of the Advanced Engineering Computing and Applications in Sciences, Sliema, Malta, 11–16 October 2009; pp. 1–6. [Google Scholar]
- Steiner, M.T.A.; Datta, D.; Neto, P.J.S.; Scarpin, C.T.; Figueira, J.R. Multi-objective optimization in partitioning the healthcare system of Parana State in Brazil. Omega 2015, 52, 53–64. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Khayyat, Z.; Awara, K.; Alonazi, A.; Jamjoom, H.; Williams, D.; Kalnis, P. Mizan: A system for dynamic load balancing in large-scale graph processing. In Proceedings of the 8th ACM European Conference on Computer Systems, Prague, Czech Republic, 15–17 April 2013; pp. 169–182. [Google Scholar]
- Vaquero, L.; Cuadrado, F.; Logothetis, D.; Martella, C. xDGP: A dynamic graph processing system with adaptive partitioning. Available online: https://arxiv.org/abs/1309.1049 (accessed on 20 September 2017).
- Yang, D.; Zhang, D.; Tan, K.L.; Cao, J.; Le Mouël, F. CANDS: Continuous optimal navigation via distributed stream processing. Proc. VLDB Endow. 2014, 8, 137–148. [Google Scholar] [CrossRef]
- Bao, N.T.; Suzumura, T. Towards highly scalable pregel-based graph processing platform with x10. In Proceedings of the 22nd International Conference on World Wide Web, Rio de Janeiro, Brazil, 13–17 May 2013; pp. 501–508. [Google Scholar]
- Vaquero, L.M.; Cuadrado, F.; Logothetis, D.; Martella, C. Adaptive partitioning for large-scale dynamic graphs. In Proceedings of the 2014 IEEE 34th International Conference on Distributed Computing Systems (ICDCS), Madrid, Spain, 30 June–3 July 2014; pp. 144–153. [Google Scholar]
- Sun, L.; Zhang, C.; Lin, Z.; Wen, F.; Xue, Y.; Salam, M.A.; Ang, S.P. Network partitioning strategy for parallel power system restoration. IET Gener. Transm. Distrib. 2016, 10, 1883–1892. [Google Scholar] [CrossRef]
Figure 1.
Workflow of the multi-objective partition method of marine sensor network based on degree of event correlation.
Figure 1.
Workflow of the multi-objective partition method of marine sensor network based on degree of event correlation.

Figure 2.
(a) Parents A and B generate a new solution C by crossover operation (b) Region C3 is changed by mutation operator.
Figure 2.
(a) Parents A and B generate a new solution C by crossover operation (b) Region C3 is changed by mutation operator.

Figure 3.
The results of the optimal solution.

Figure 4.
The change of the three methods on the when the buoy number increases.

Figure 5.
The change of the three methods on the when the buoy number increases.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Description of related parameters.
| Parameter | Description of Parameter |
|---|---|
| Number otyphoons | |
| The buoy belongs to the th region, | |
| The buoy . does not belongs to the th region, | |
| The th typhoon is related to buoys in the region , | |
| The th typhoon is not related to buoys in the region , | |
| Buoy and buoy are connected to each other. | |
| Buoy and buoy are not connected to each other. |
Table 2.
Description of constraints.
| Description of Constraint | Constraint |
|---|---|
| Number of regions | |
| Size of region | |
| Disjoint regions | |
| Non-empty region | |
| Including all buoys | |
| Integrity of Buoy |
Table 3.
Samples of typhoon data.
| No. | Start Date | End Date | Data 1 | … | Data k (k Is Variable) | ||
|---|---|---|---|---|---|---|---|
| 200,001 | 5 May 2000 08:00 | 12 May 2000 20:00 | Longitude, Latitude | 135, 9.9 | … | Longitude, Latitude | 149.5, 28.4 |
| Wind Speed (m/s) | 15 | Wind Speed (m/s) | 15 | ||||
| … | … | … | … | ||||
| Pressure (dbar) | 1004 | Pressure (dbar) | 998 | ||||
| Wind-force (Category) | 7 | Wind-force (Category) | 7 | ||||
| … | … | … | … | … | … | … | |
| 201,703 | 2 July 2017 08:00 | 4 July 2017 17:00 | Longitude, Latitude | 126.8, 20.3 | … | Longitude, Latitude | 136.3, 34.2 |
| Wind Speed (m/s) | 18 | Wind Speed (m/s) | 23 | ||||
| … | … | … | … | ||||
| Pressure (dbar) | 1000 | Pressure (dbar) | 992 | ||||
| Wind-force (Category) | 8 | Wind-force (Category) | 9 | ||||
Table 4.
The relationship between and running time for each population size.
| The Population Size | The Number of Regions | (%) | Running Time (ms) |
|---|---|---|---|
| 20 | 4 | 71.00 | 4067.528 |
| 5 | 64.69 | 3744.439 | |
| 6 | 59.17 | 3117.520 | |
| 7 | 50.49 | 3093.2761 | |
| 8 | 47.14 | 2503.271 | |
| 50 | 4 | 71.99 | 8731.366 |
| 5 | 66.46 | 8486. 331 | |
| 6 | 61.53 | 8392.4750 | |
| 7 | 56.01 | 8212.1418 | |
| 8 | 50.88 | 7645.235 | |
| 100 | 4 | 73.17 | 24,479.152 |
| 5 | 66.66 | 23,549.383 | |
| 6 | 59.56 | 21,753.301 | |
| 7 | 57.00 | 20,001.864 | |
| 8 | 55.02 | 1655.209 |
Table 5.
Comparison of NSGA-II with other genetic algorithm in AB-Graph partition problem.
| Objective Function | (%) | (ms) |
|---|---|---|
| SOGA with the maximum value of θ | 76.13 | 153.34 |
| SOGA with the minimum value of f2 | 57.59 | 121.21 |
| NSGA solution | 61.93 | 150.55 |
| NSGA-II Optimal solution | 73.57 | 144.31 |
| Improvement | 11.64% | 4.14% |
Table 6.
Performance of proposed method in different data size.
| The Number of Typhoons | (%) | (ms) |
|---|---|---|
| 140 | 70.19 | 107.89 |
| 145 | 72.62 | 110.19 |
| 150 | 72.85 | 112.72 |
| 155 | 72.14 | 114.34 |
| 160 | 72.59 | 125.21 |
| 165 | 72.16 | 143.15 |
| 170 | 73.57 | 144.31 |
Table 7.
Partitioning effect of proposed method by different data sizes.
| The Number of Typhoons | (%) |
|---|---|
| 140 | 61.11 |
| 145 | 59.72 |
| 150 | 59.72 |
| 155 | 61.11 |
| 160 | 58.94 |
| 165 | 60.27 |
| 170 | 59.72 |
Table 8.
Optimal results of layout for AB-Graph.
| Region ID | Number of Buoys | Buoy ID |
|---|---|---|
| 1 | 15 | “0124”, “0129”, “0143”, “0156”, “0259”, “0294”, “0146”, “0241”, “0086”, “0228”, “0158”, “0331”, “0332”, “0333”, “0338” |
| 2 | 15 | “0094”, “0144”, “0222”, “0233”, “0286”, “0149”, “0160”, “0290”, “0229”, “0225”, “0231”, “0234”, “0220”, “0224”, “0199” |
| 3 | 12 | “0187”, “0188”, “0221”, “0262”, “0264”, “0182”, “0151”, “0148”, “0184”, “0185”, “0072”, “0205” |
| 4 | 11 | “0196”, “0195”, “0194”, “0335”, “0181”, “0364”, “0365”, “0366”, “0367”, “0368”, “0359” |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Huang, D.; Xu, C.; Zhao, D.; Song, W.; He, Q. A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation. Sensors 2017, 17, 2168. https://doi.org/10.3390/s17102168
AMA Style
Huang D, Xu C, Zhao D, Song W, He Q. A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation. Sensors. 2017; 17(10):2168. https://doi.org/10.3390/s17102168
Chicago/Turabian StyleHuang, Dongmei, Chenyixuan Xu, Danfeng Zhao, Wei Song, and Qi He. 2017. "A Multi-Objective Partition Method for Marine Sensor Networks Based on Degree of Event Correlation" Sensors 17, no. 10: 2168. https://doi.org/10.3390/s17102168
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.