
Selection of Shear Horizontal Wave Transducers for Robotic Nondestructive Inspection in Harsh Environments

Abstract
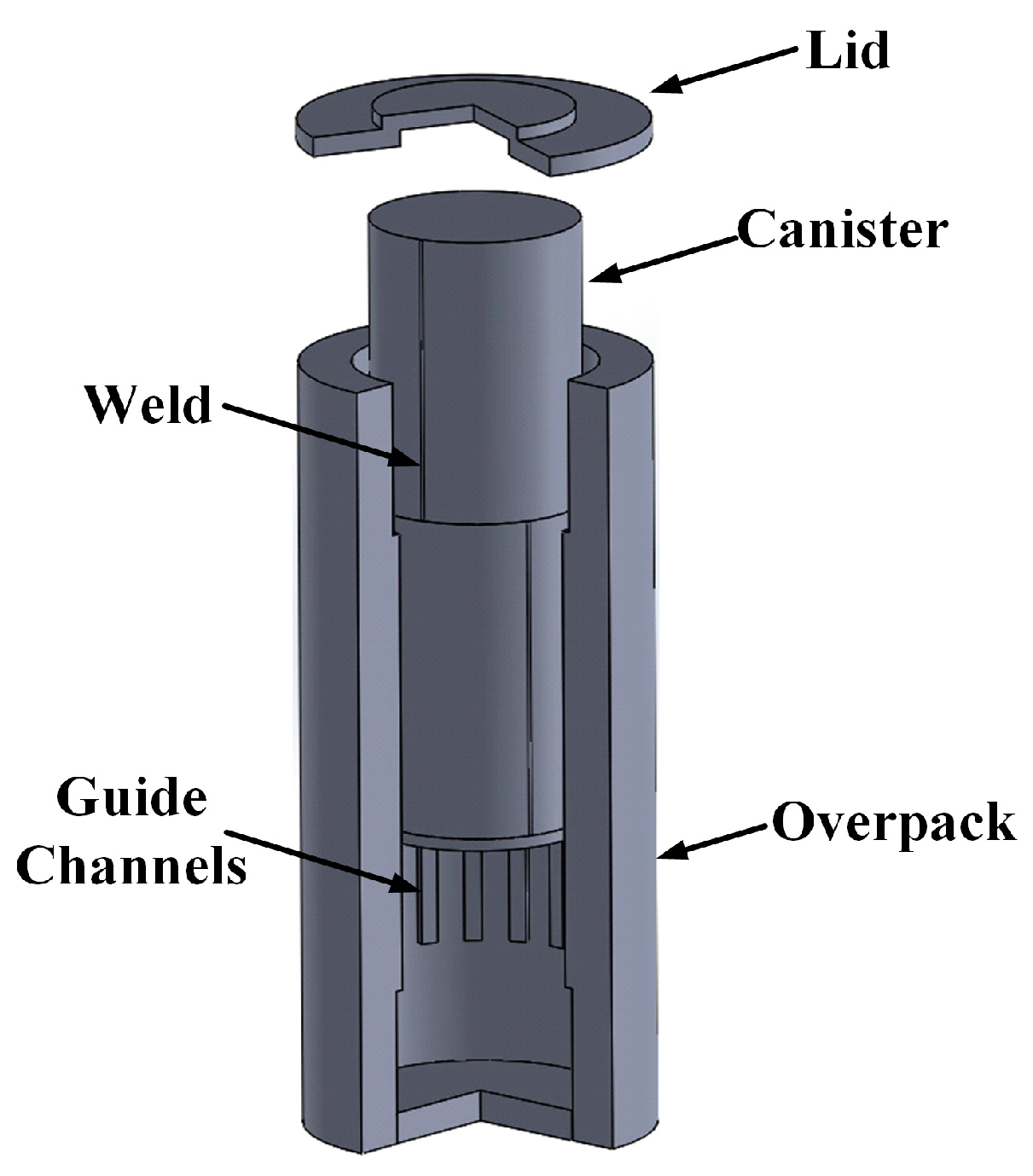
:1. Introduction
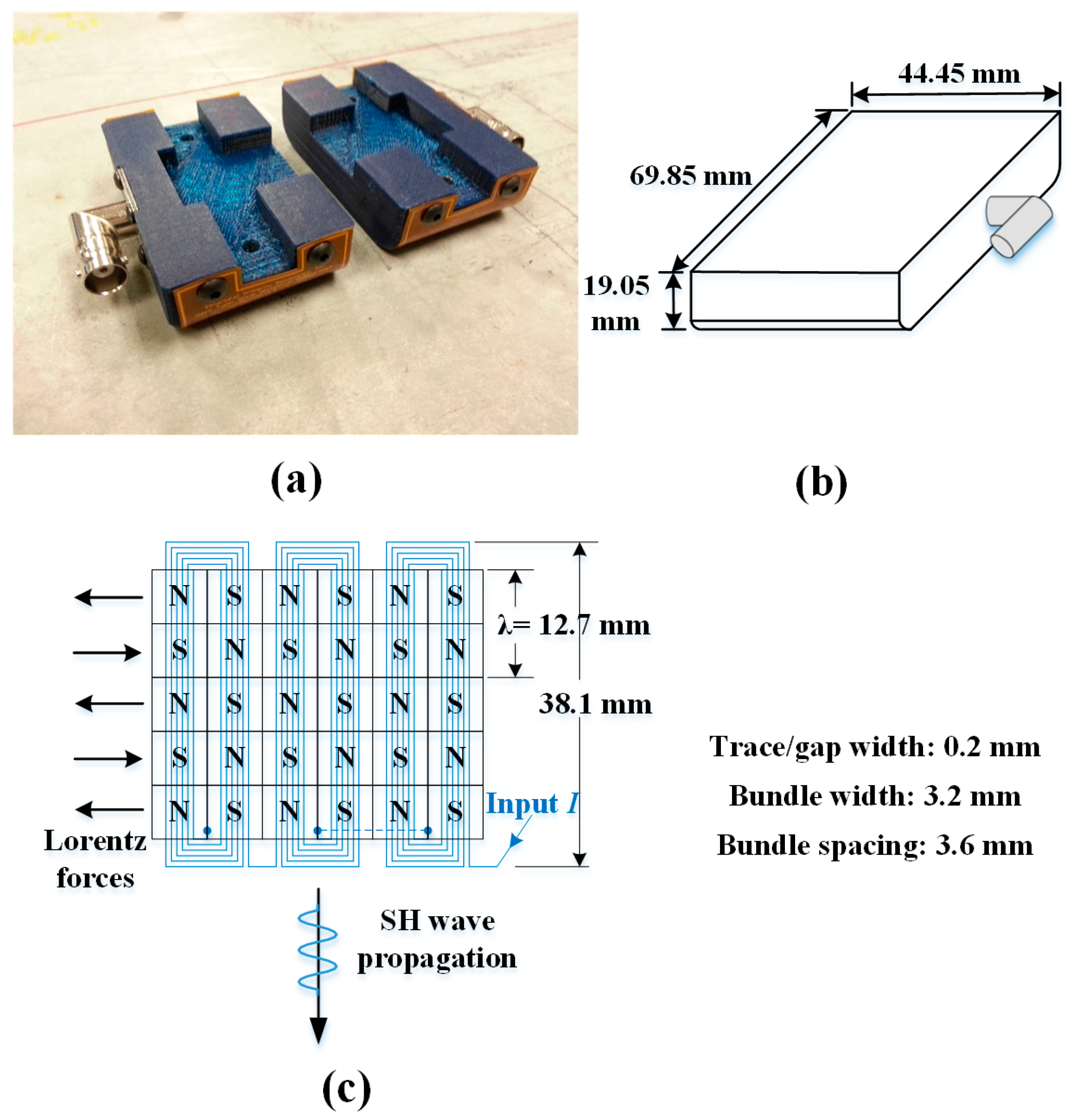
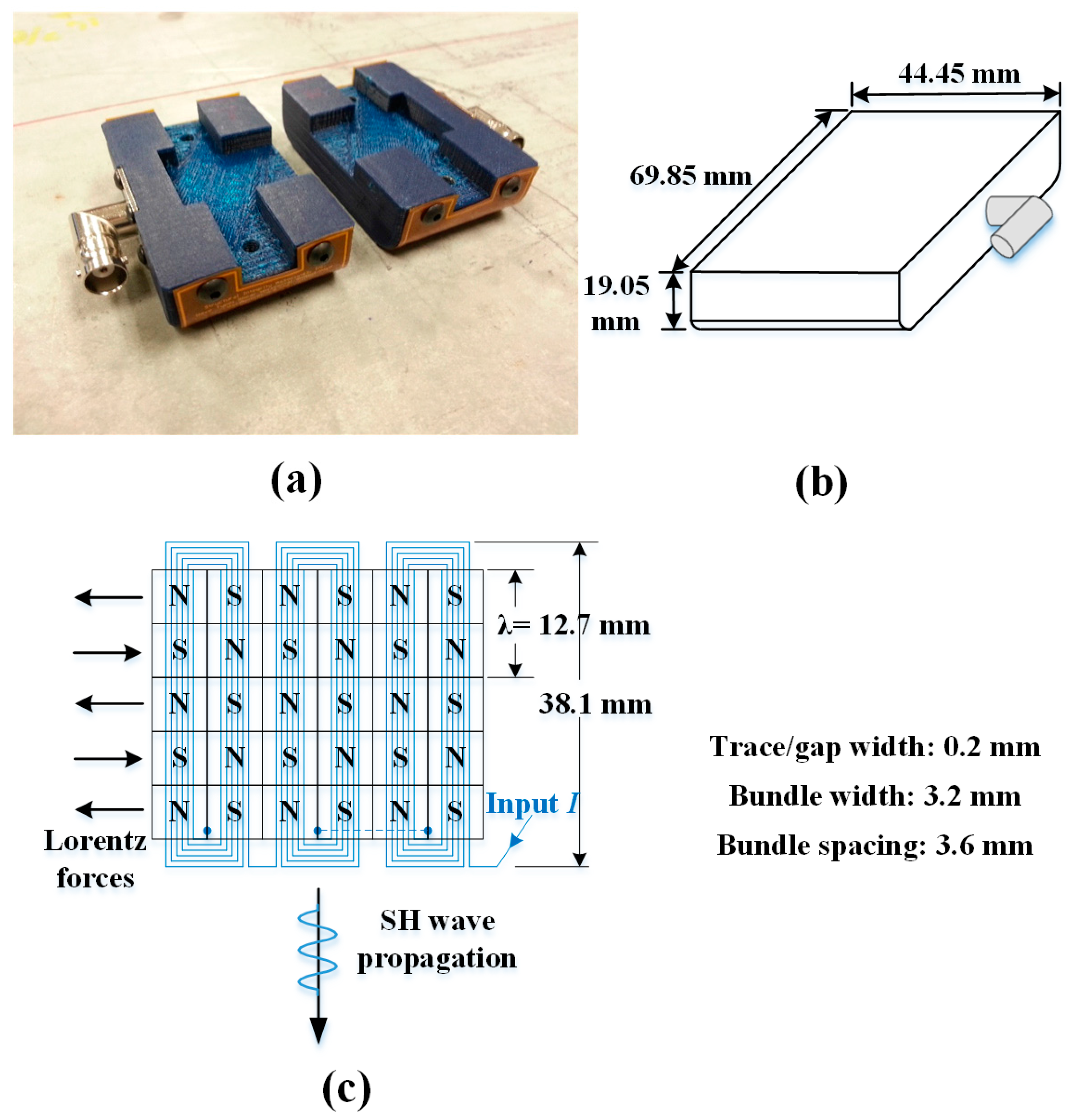
2. Periodic Permanent Magnet (PPM) Electromagnetic Acoustic Transducers (EMATs)
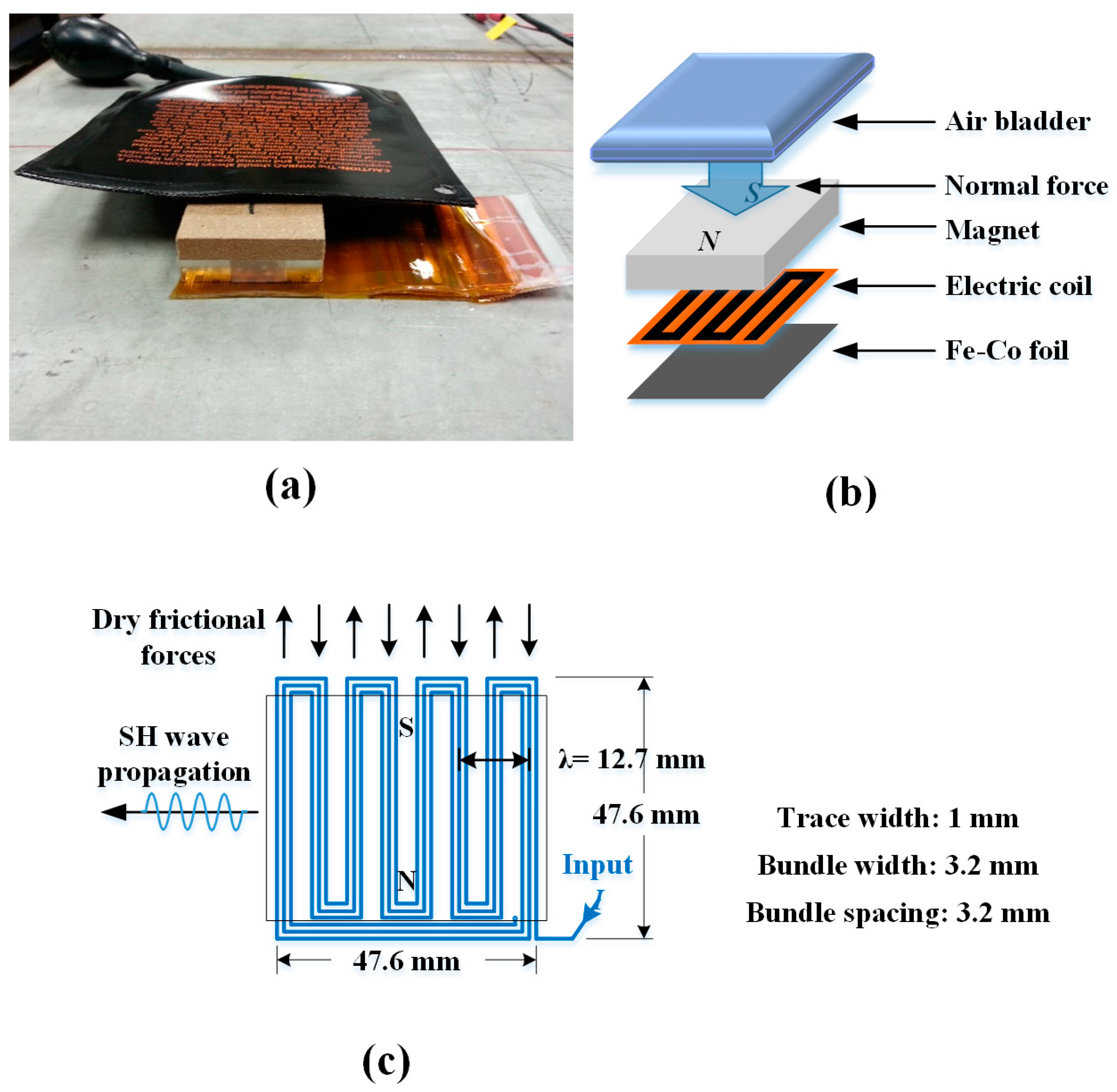
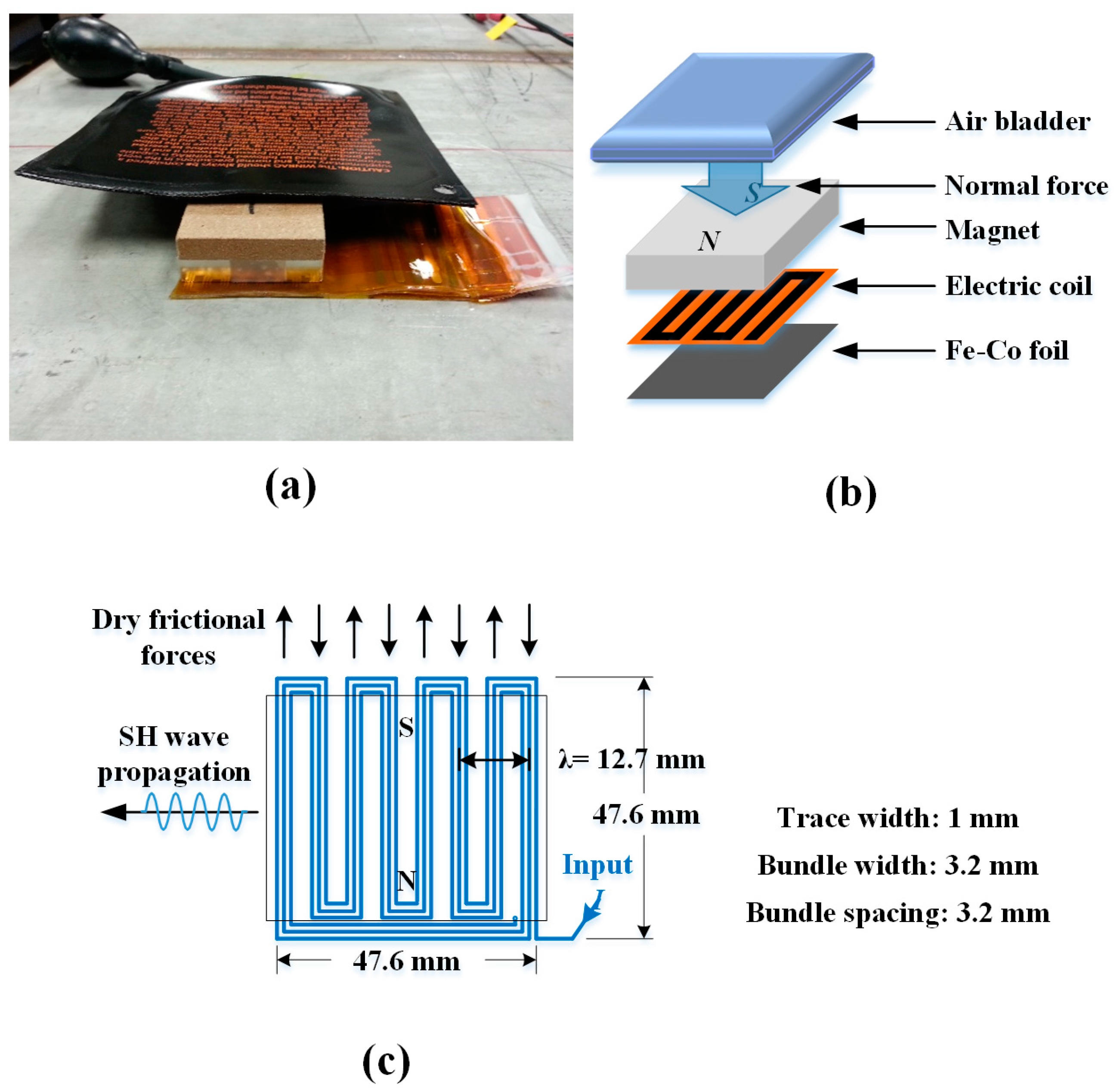
3. Dry-Coupled Magnetostrictive Transducers (MSTs)
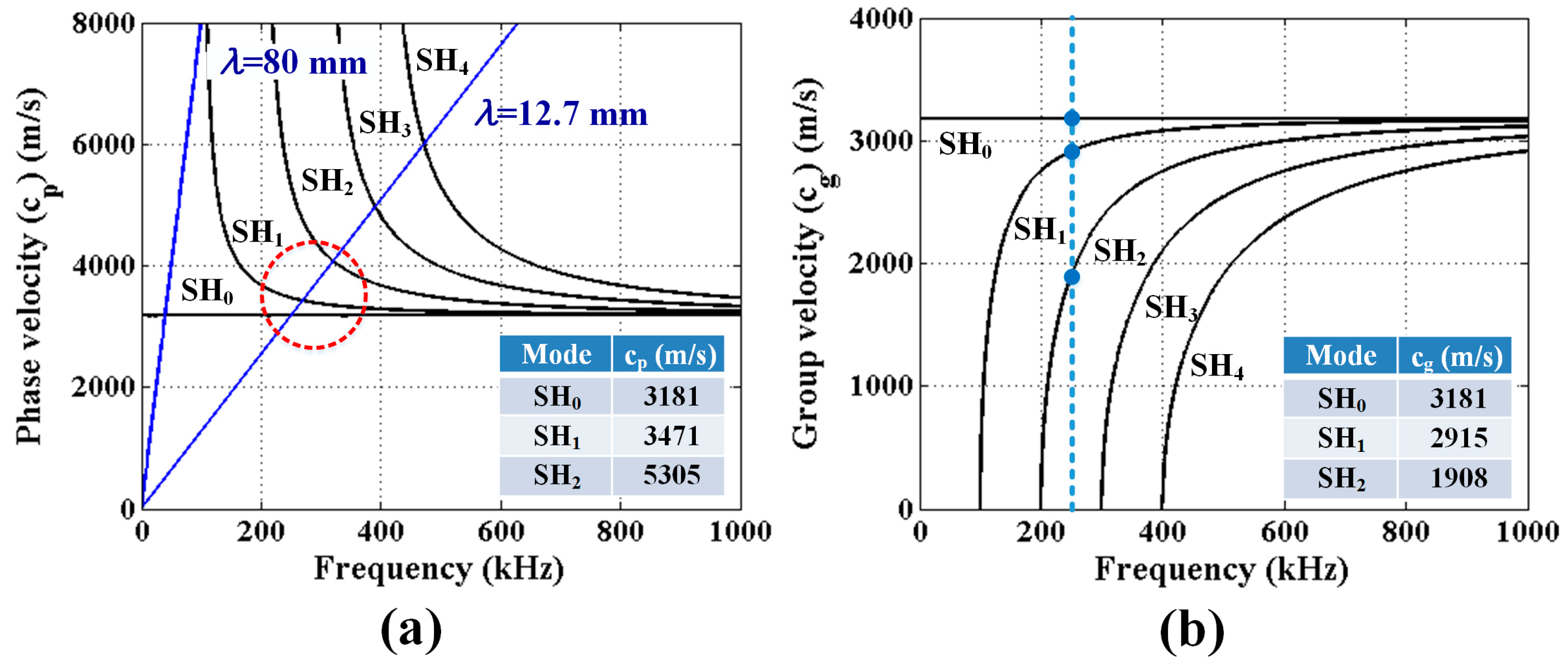
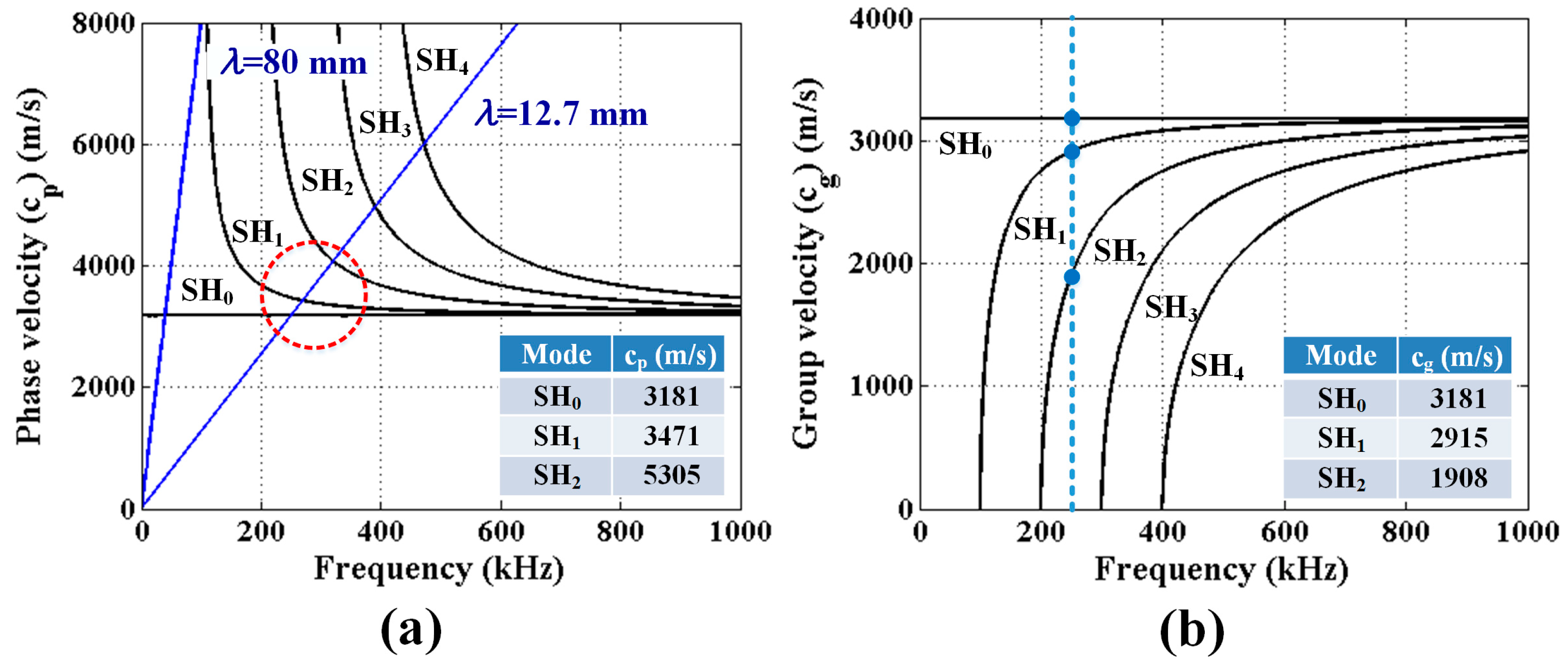
4. Mode/Frequency Selection of Shear Horizontal (SH) Waves
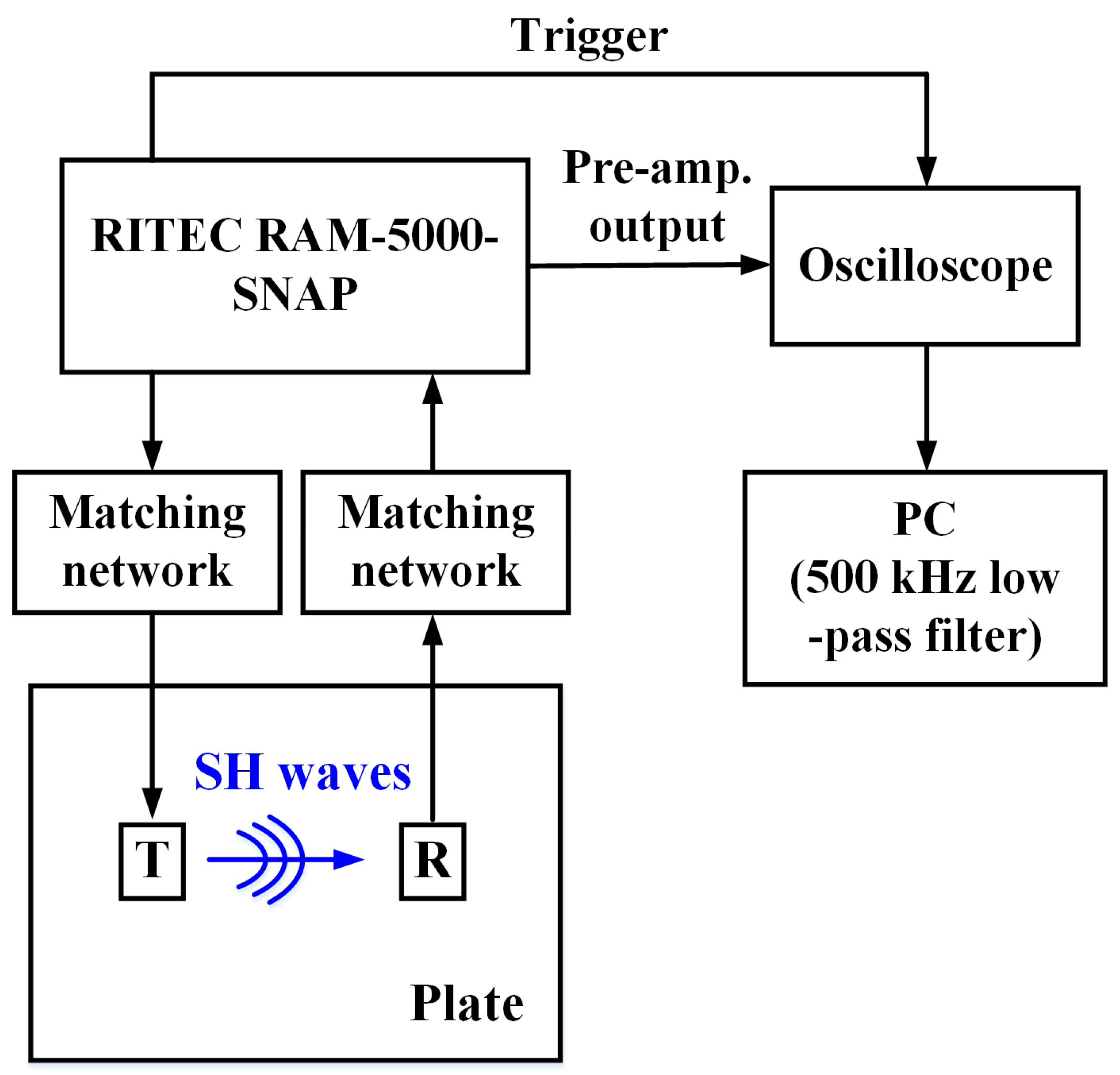
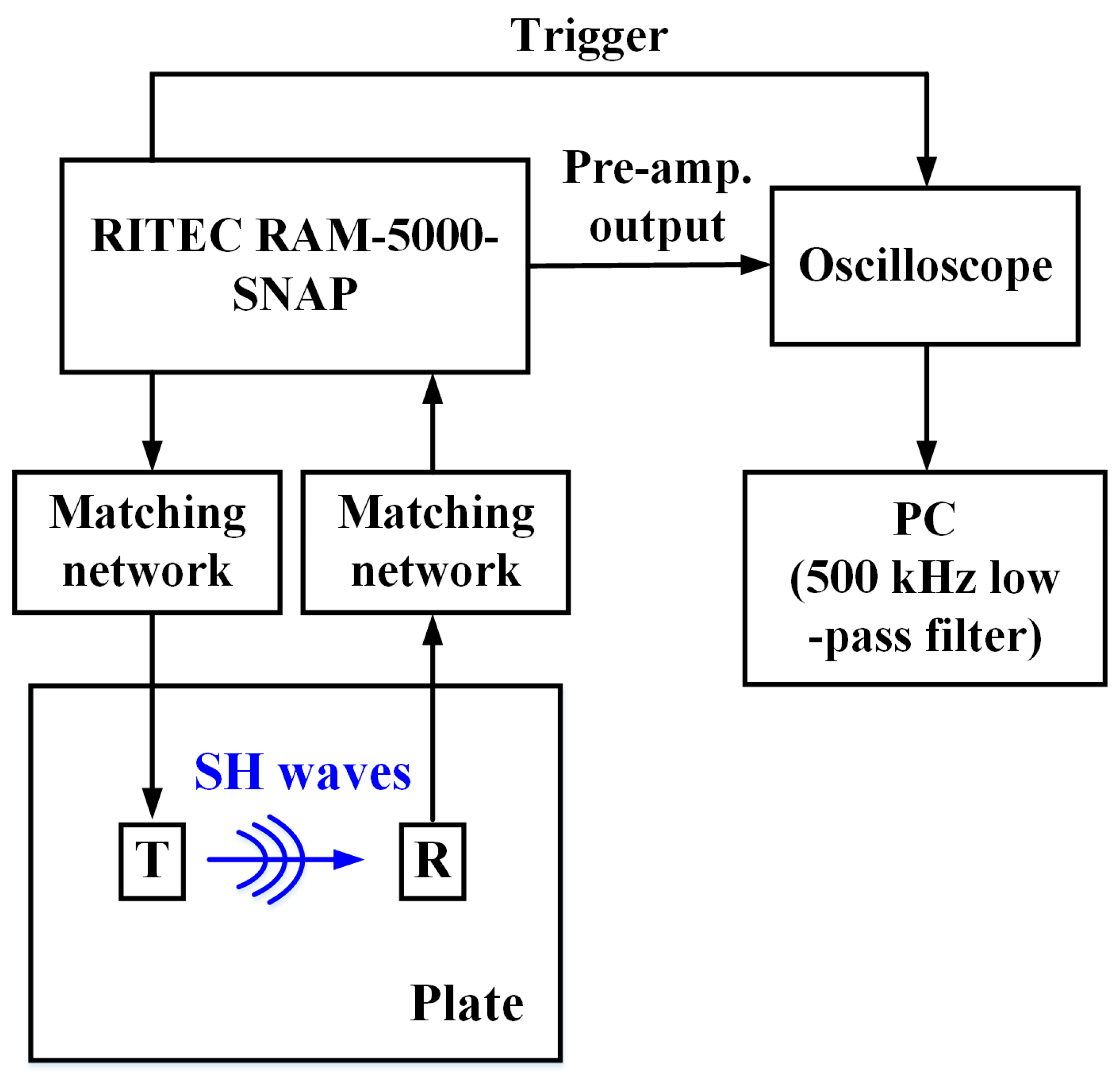
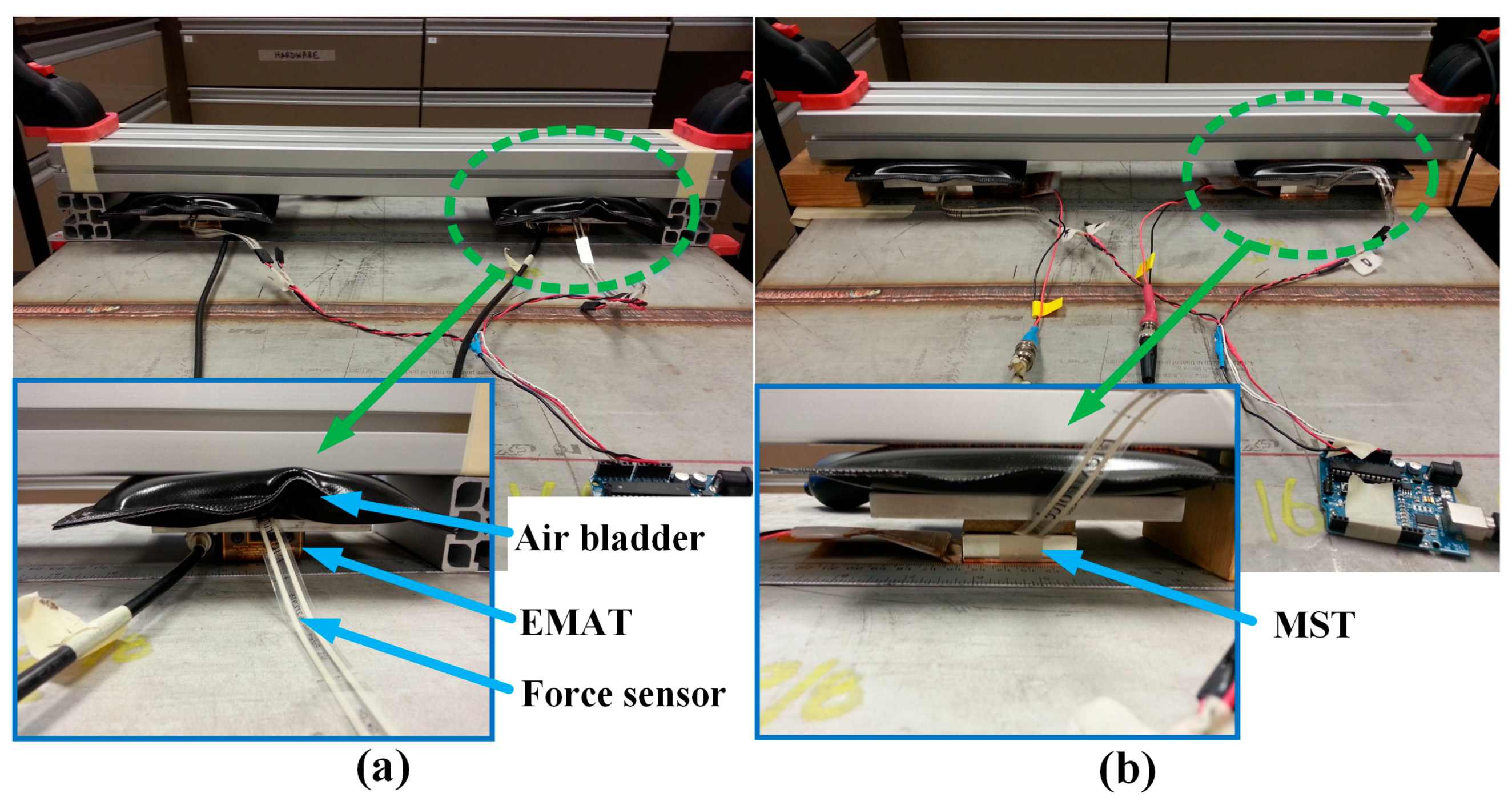
5. Experimental Procedures
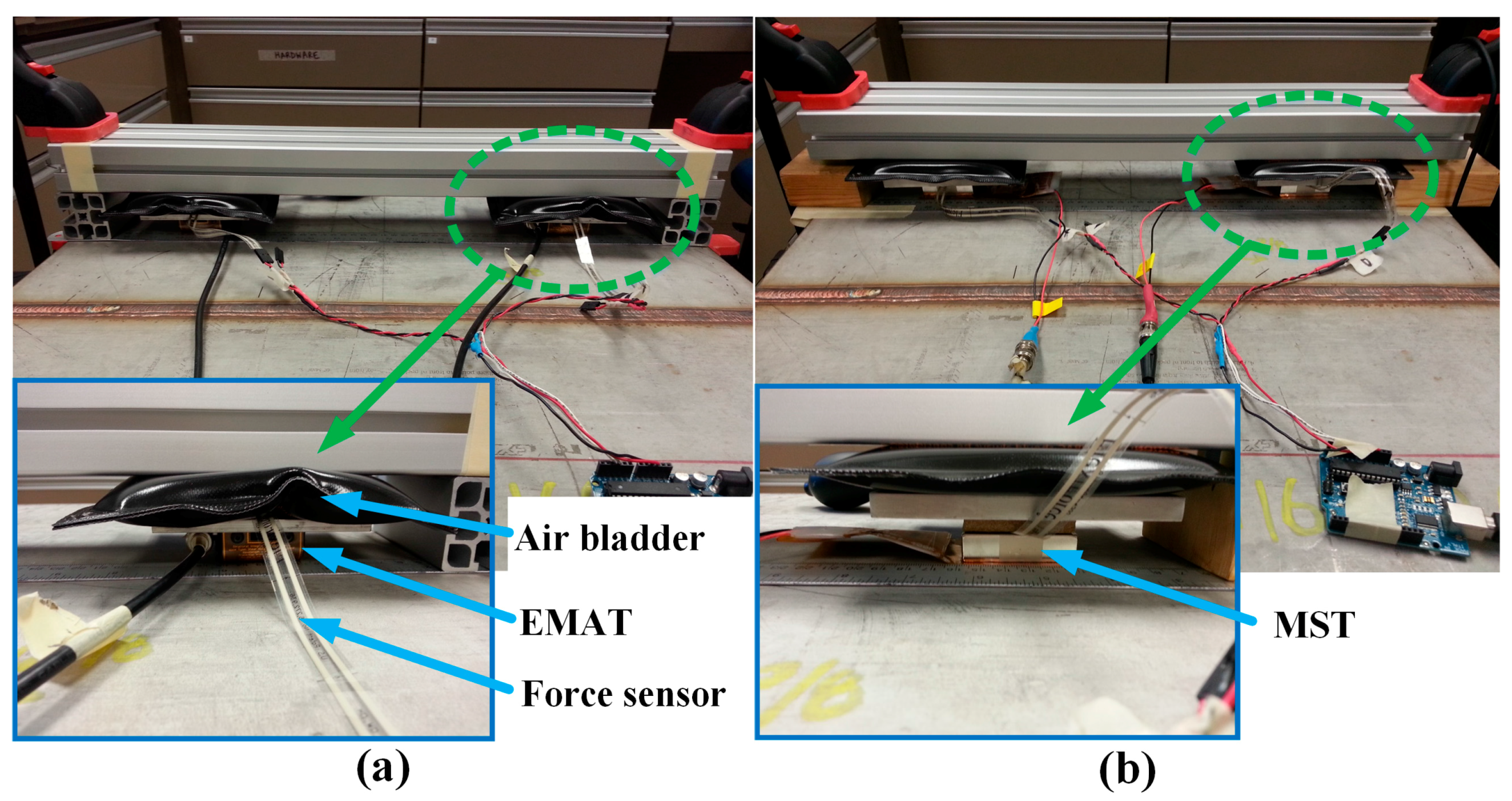
- Test 1 to identify the effect of normal force applied to the transducers during SH wave measurements;
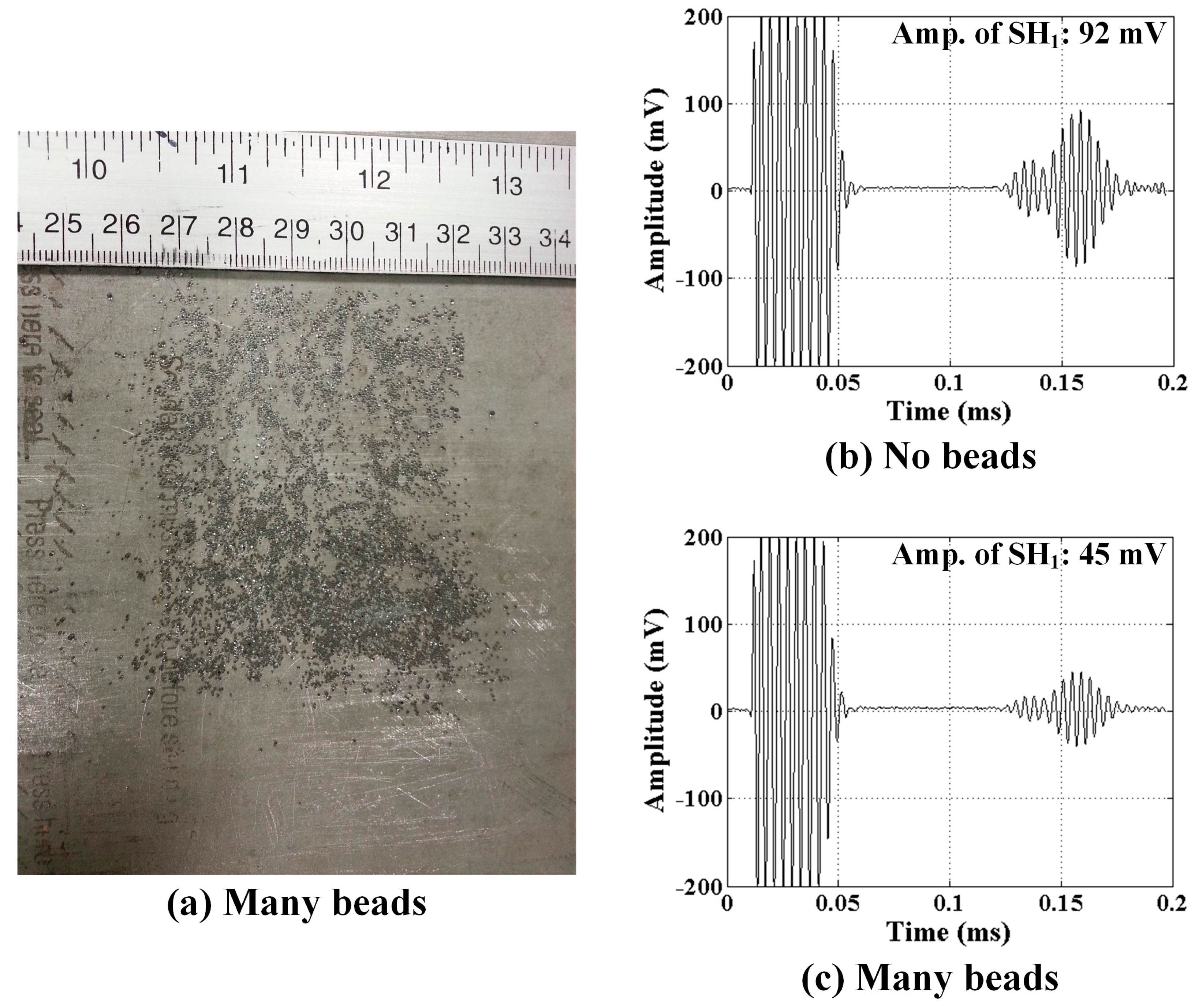
- Test 2 to examine how surface debris affects the performance of the transducers; and
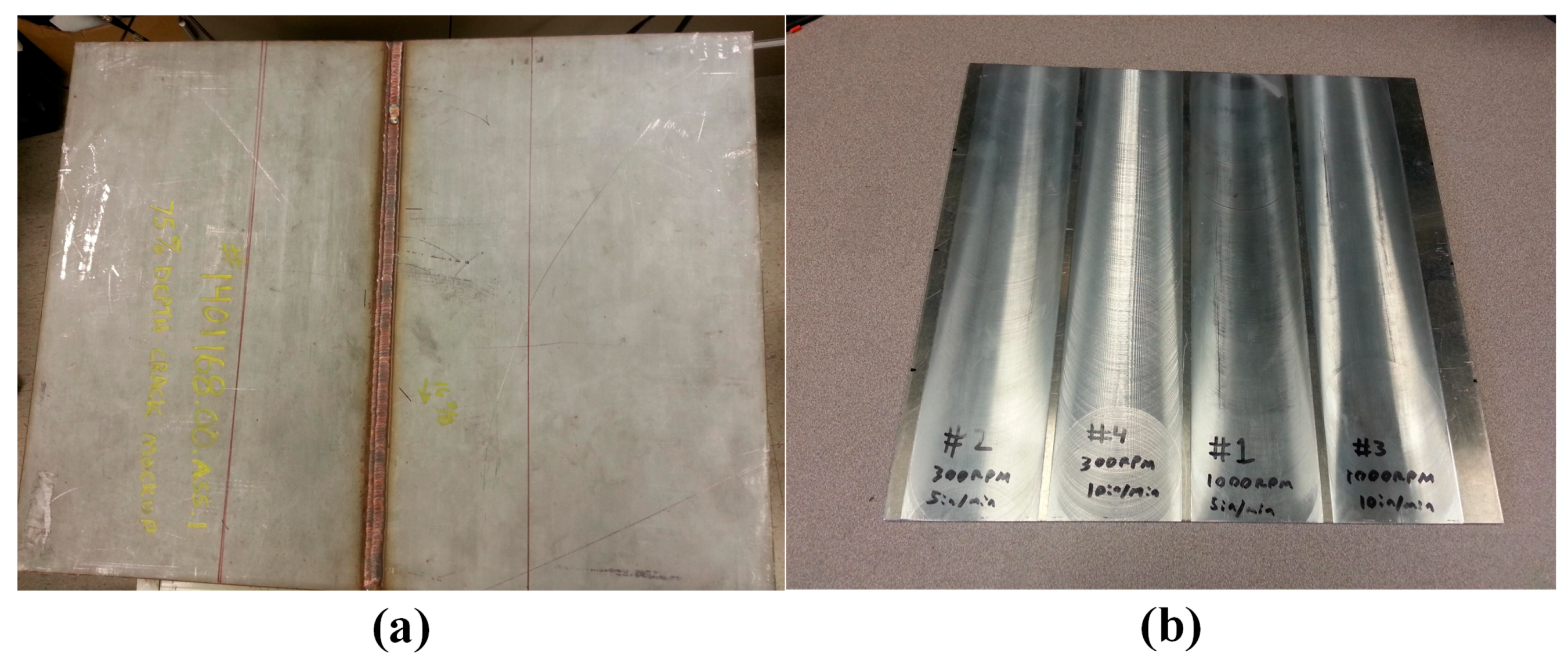
- Test 3 to analyze the influence of surface roughness on the transduction efficiency of the transducers.
6. Experimental Results and Discussion
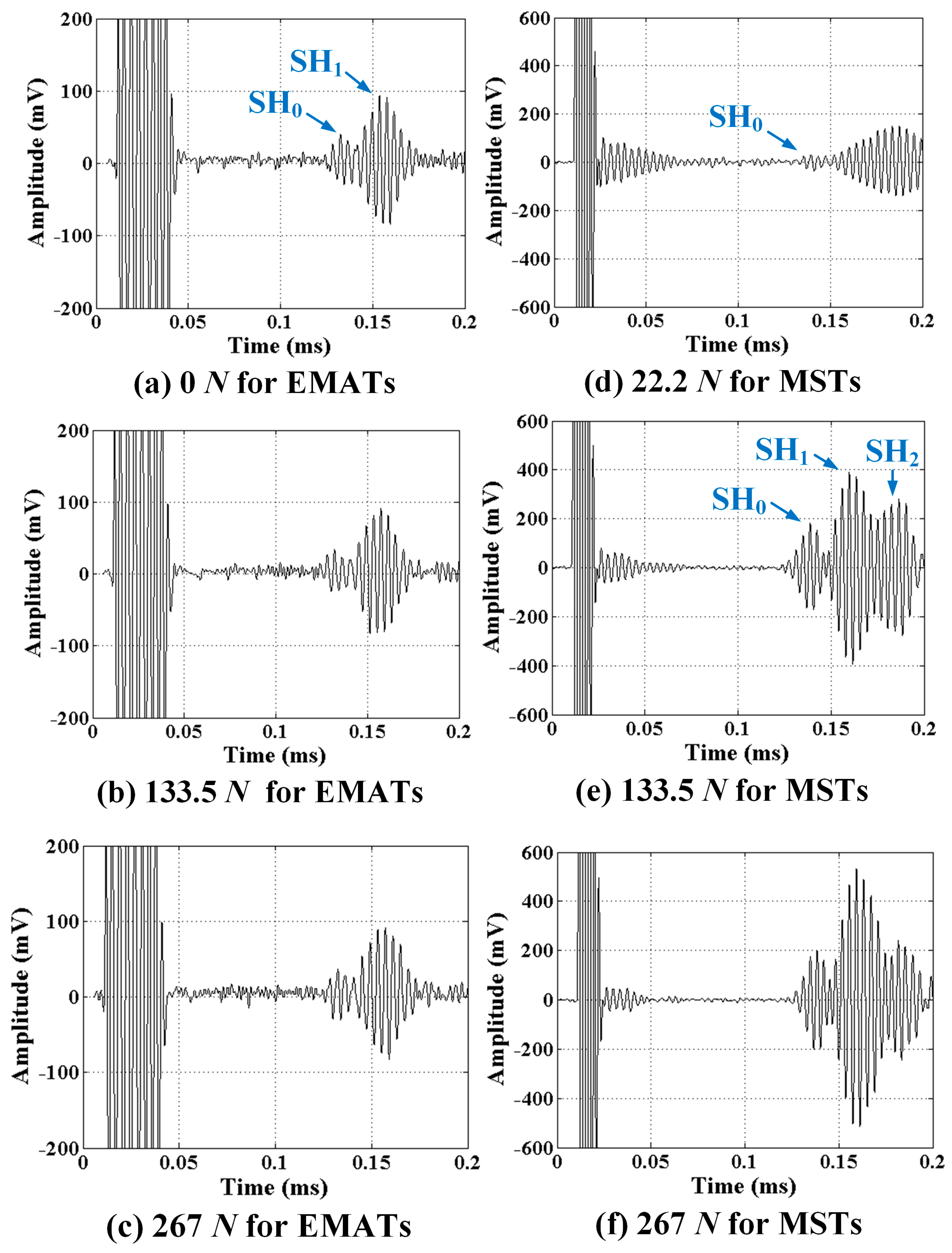
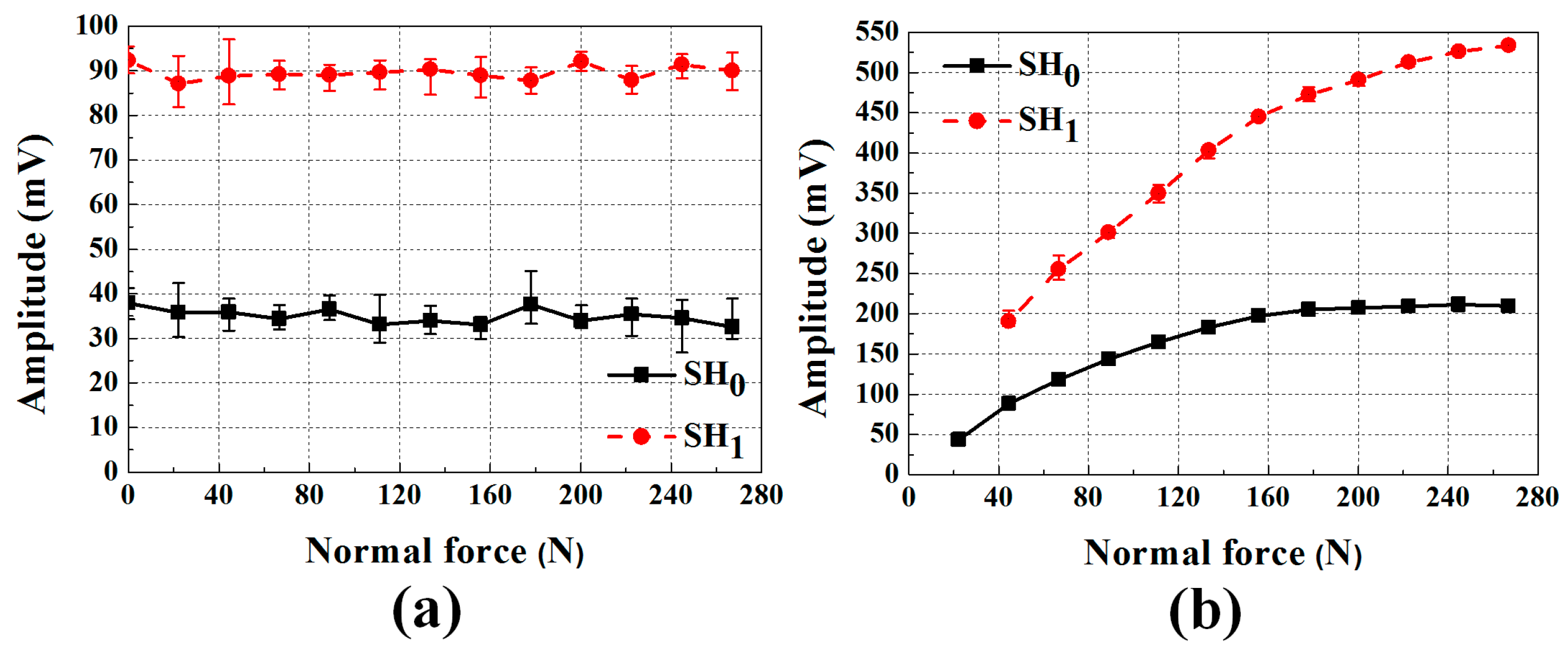
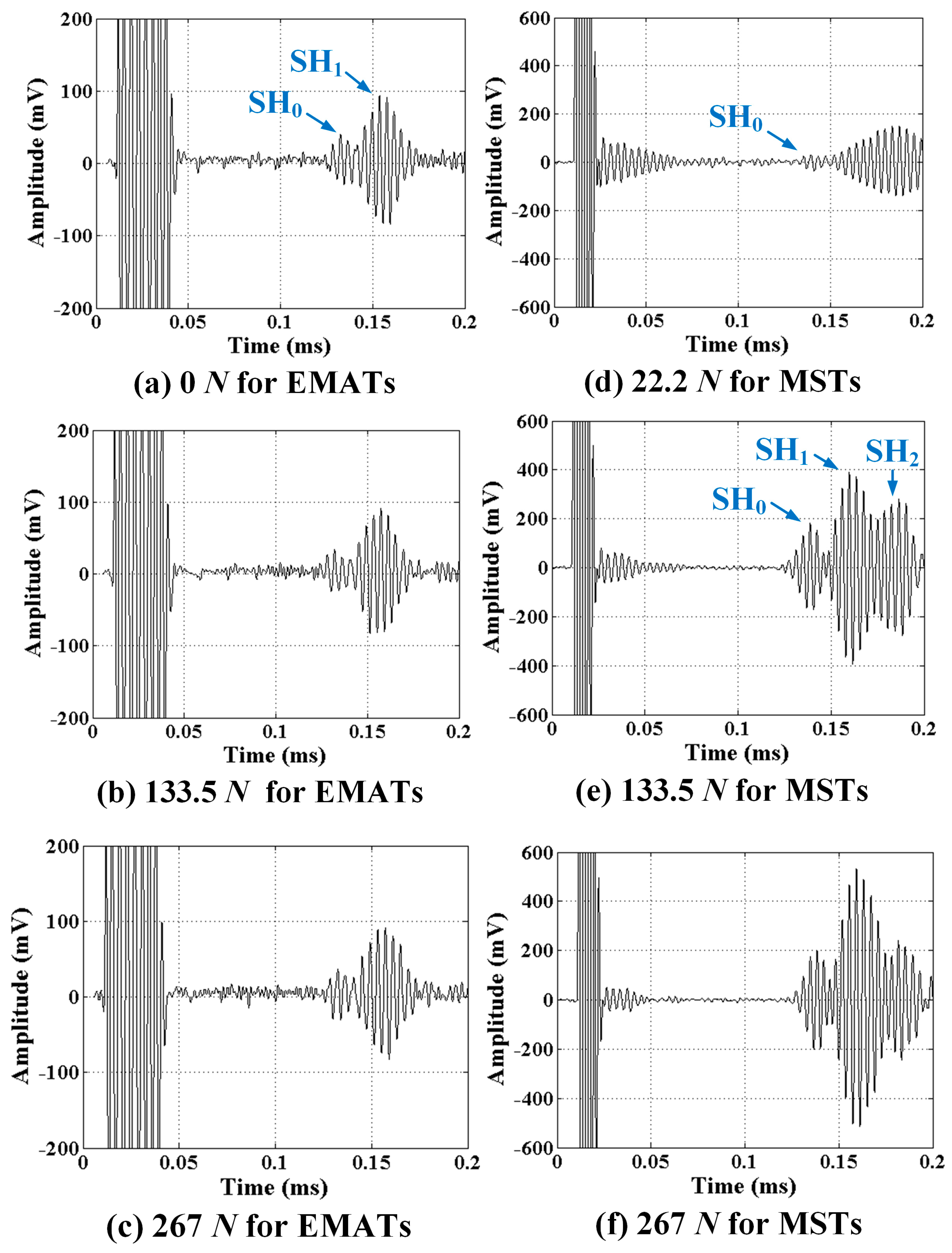
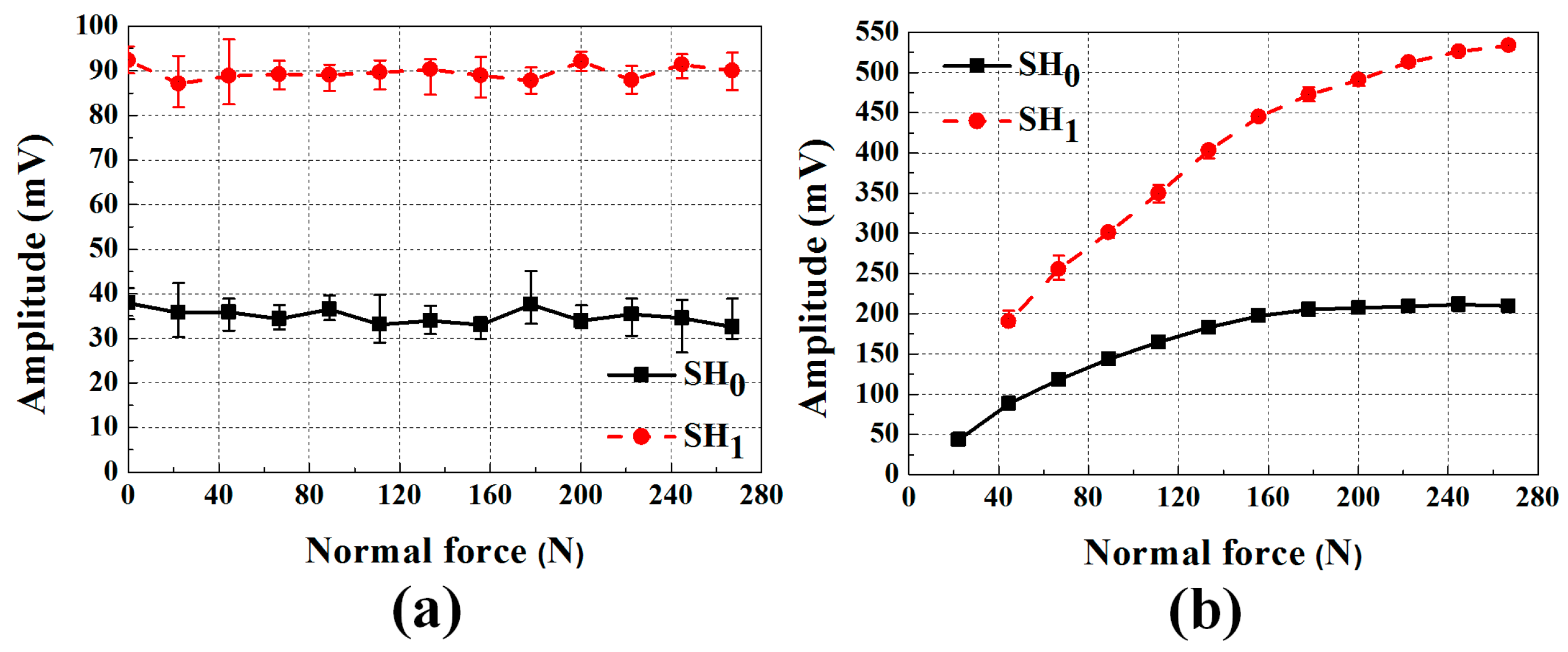
6.1. Test 1: Effect of Normal Force Applied to the Transducers during SH Wave Measurements
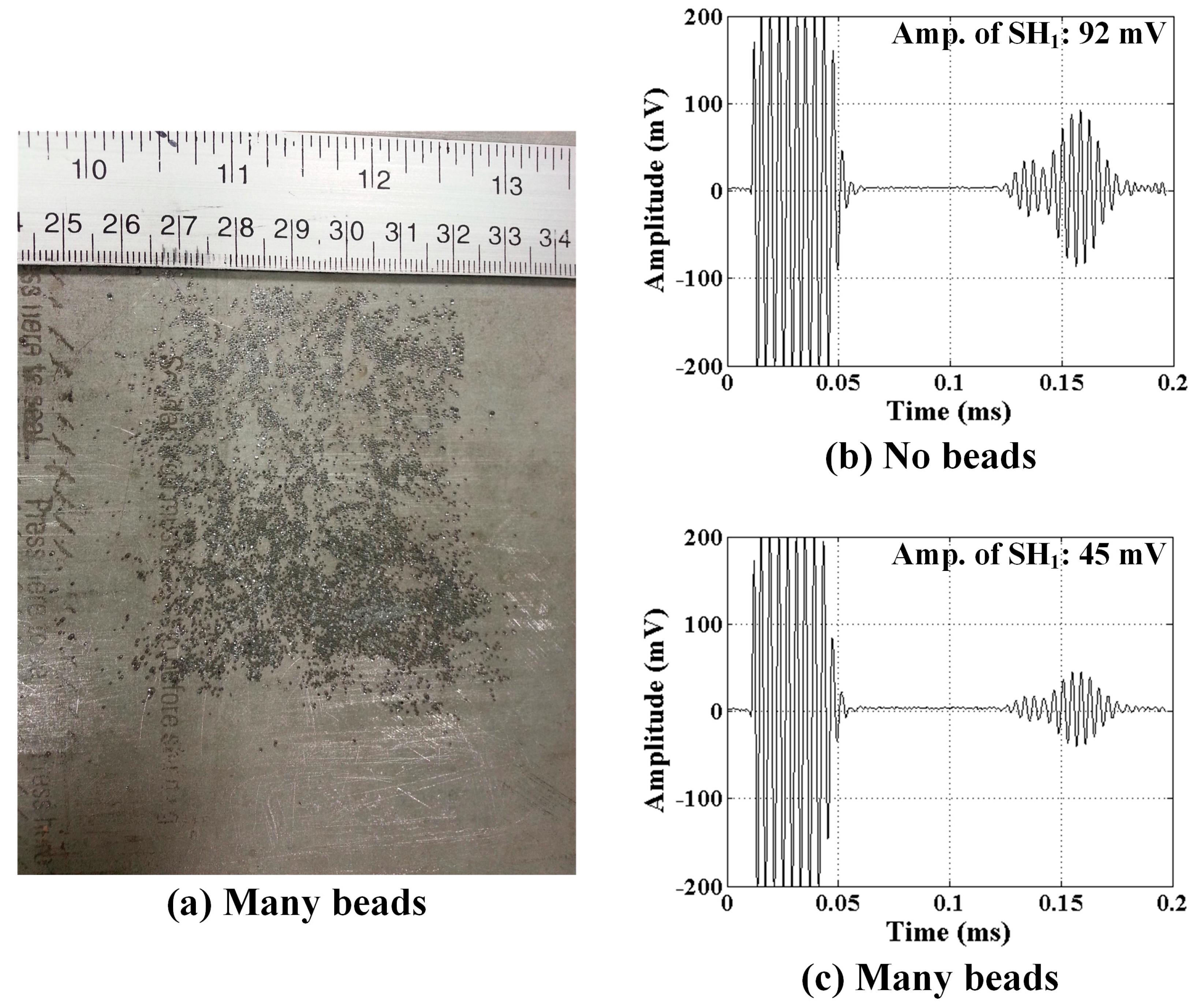
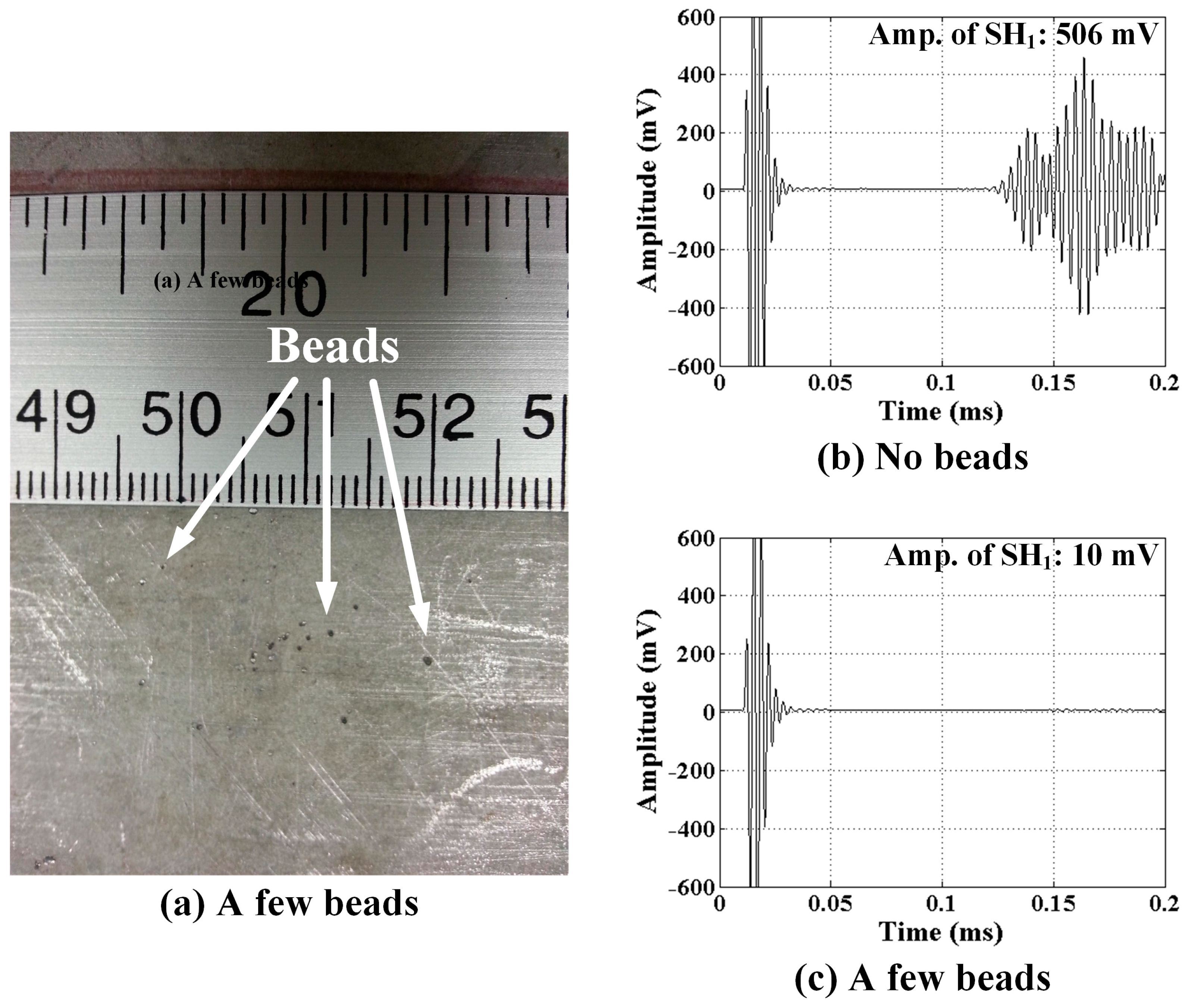
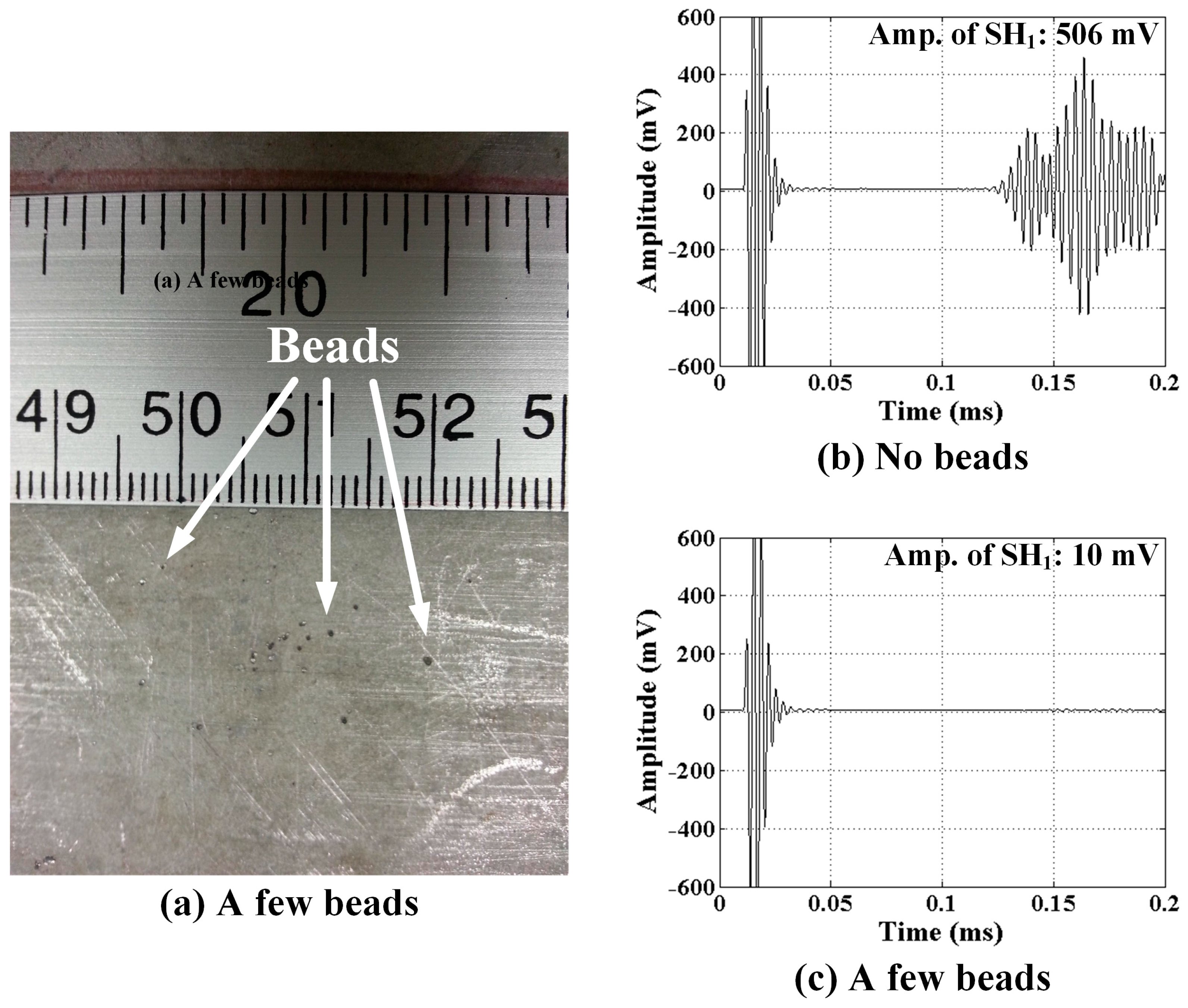
6.2. Test 2: Influence of Surface Debris on SH Wave Measurements
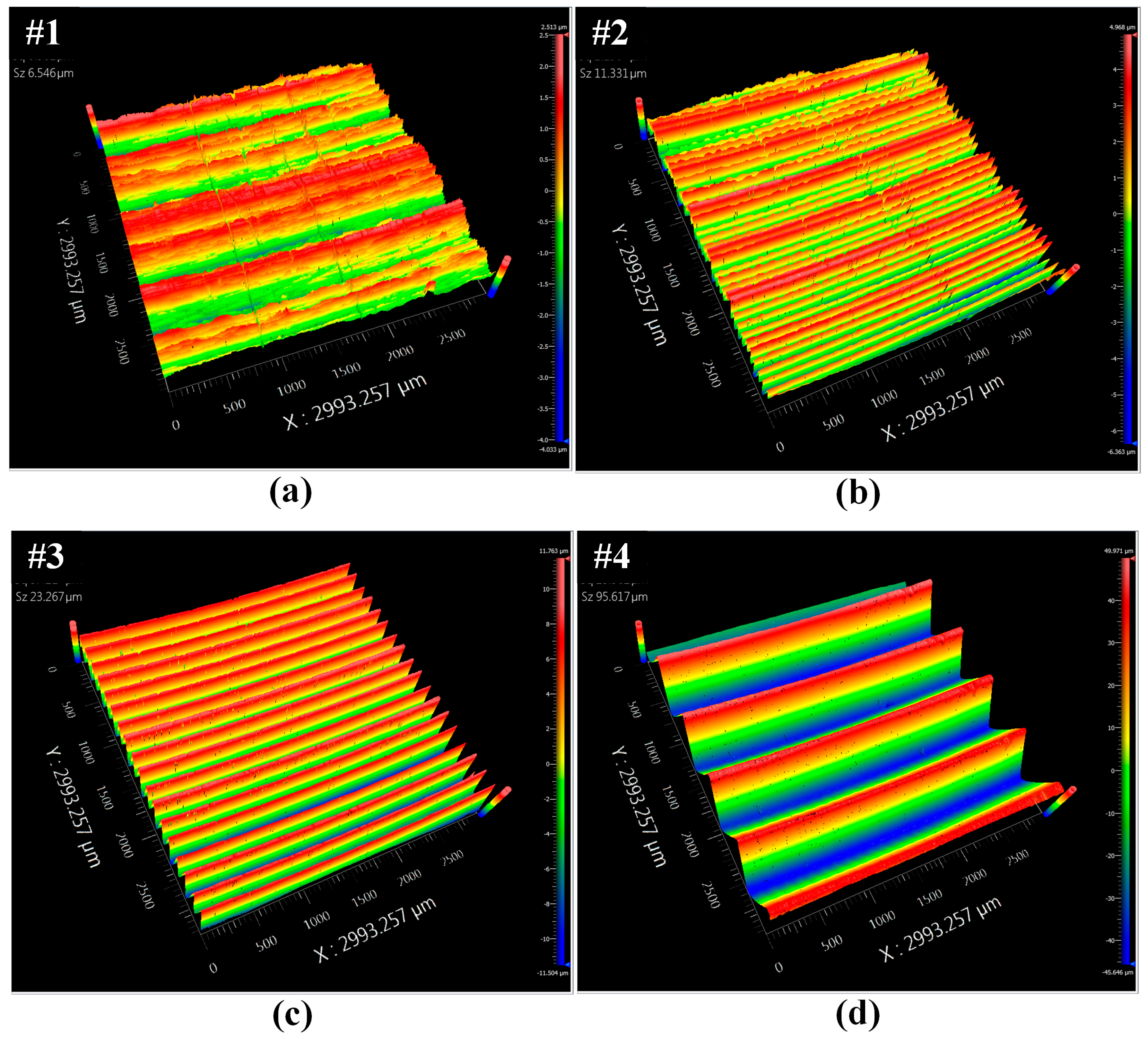
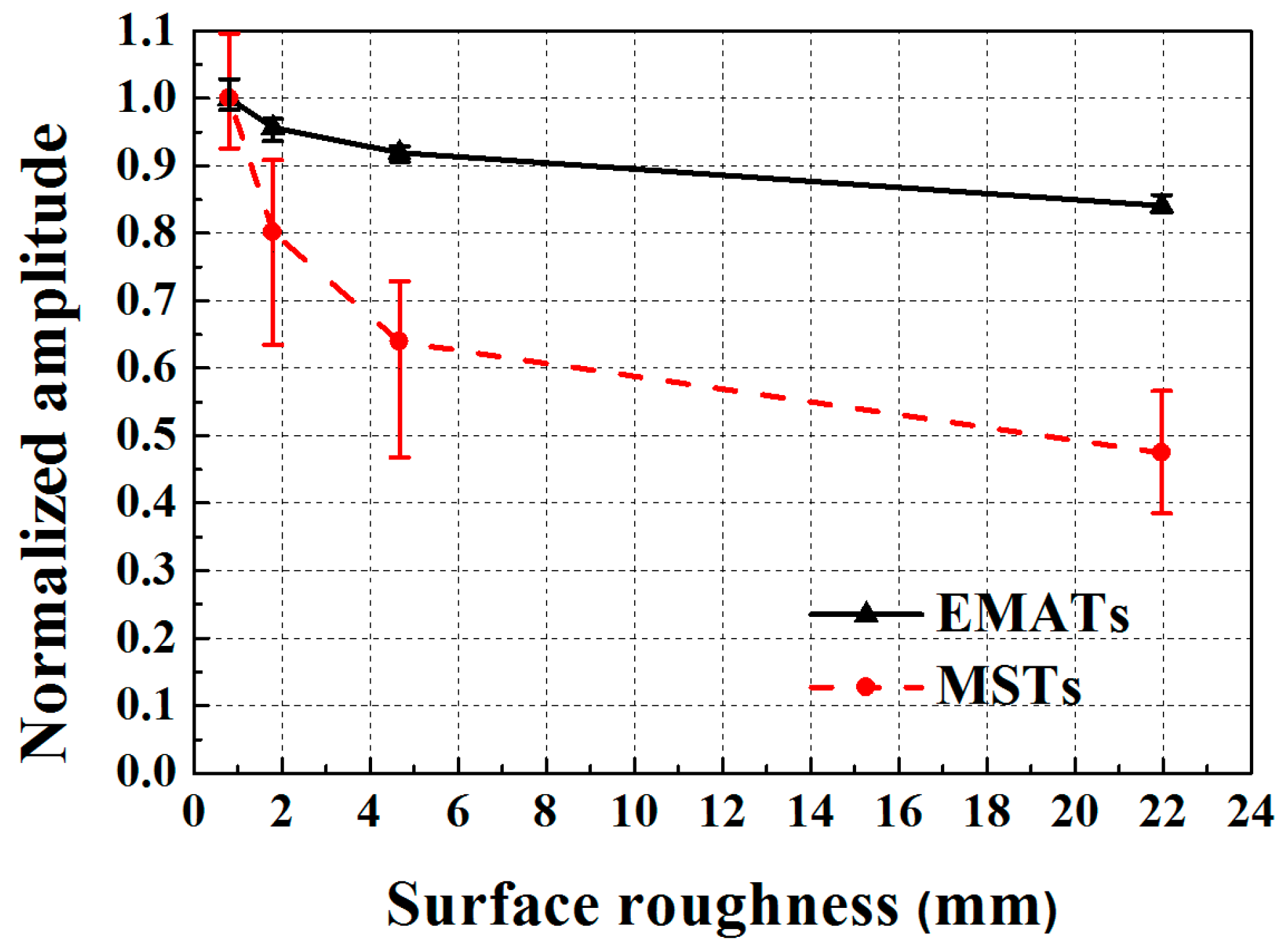
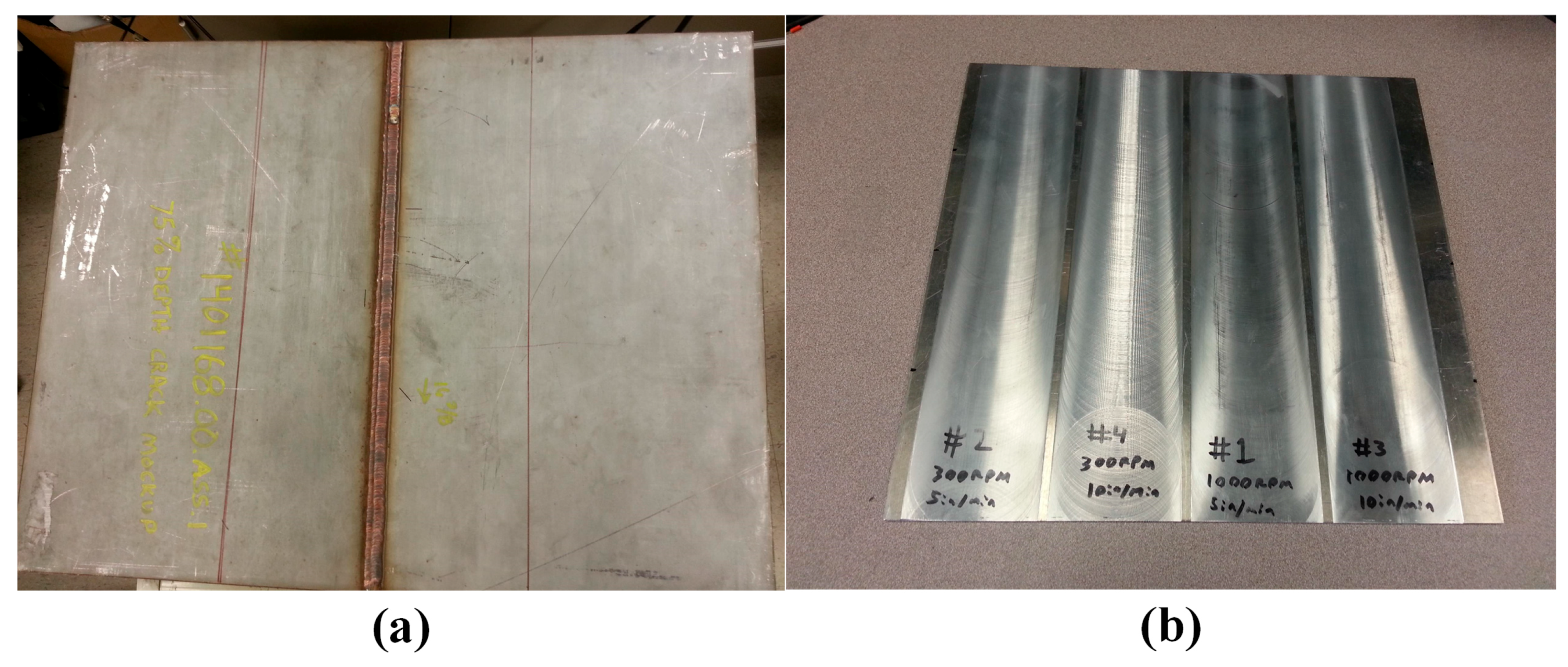
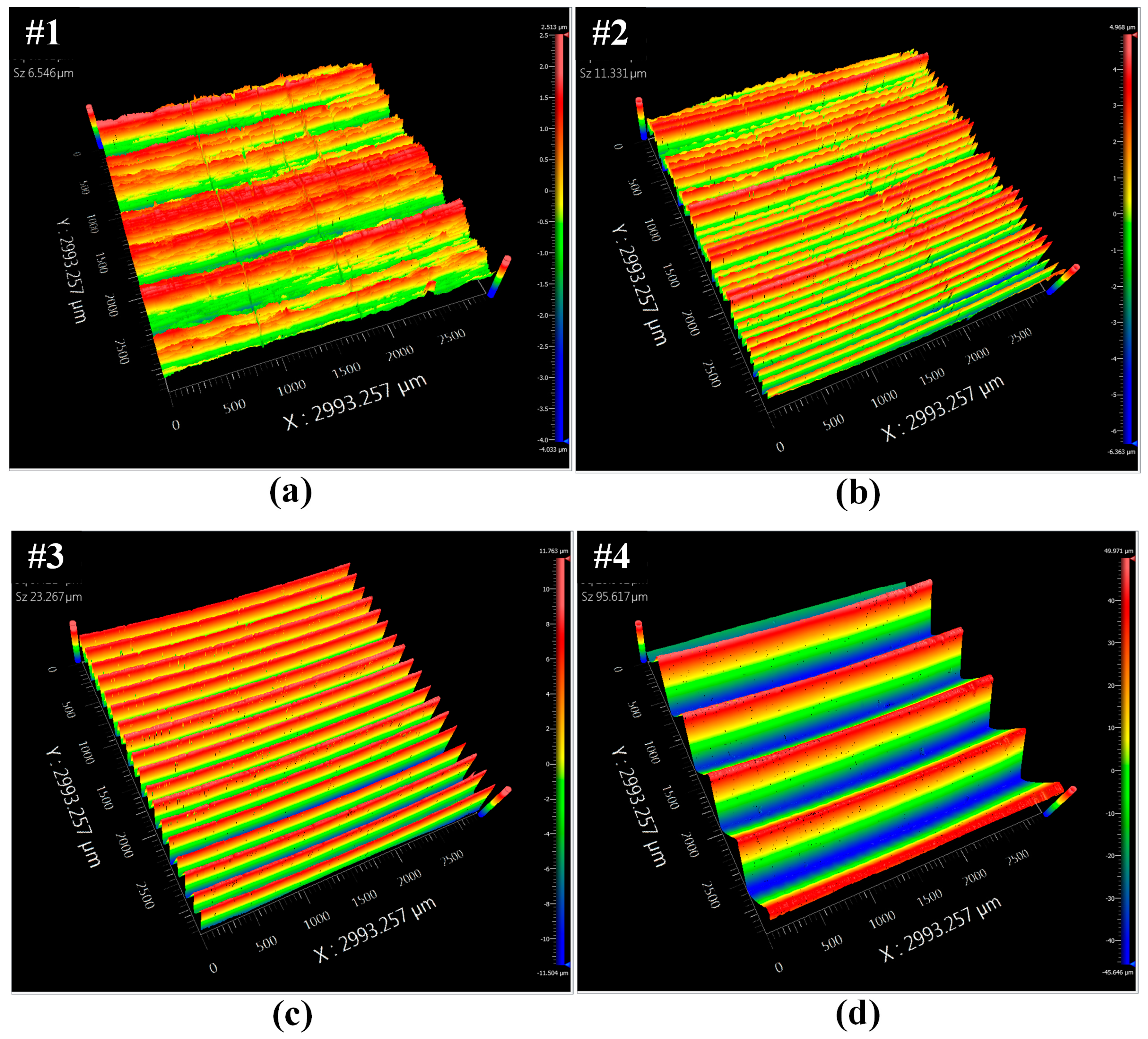
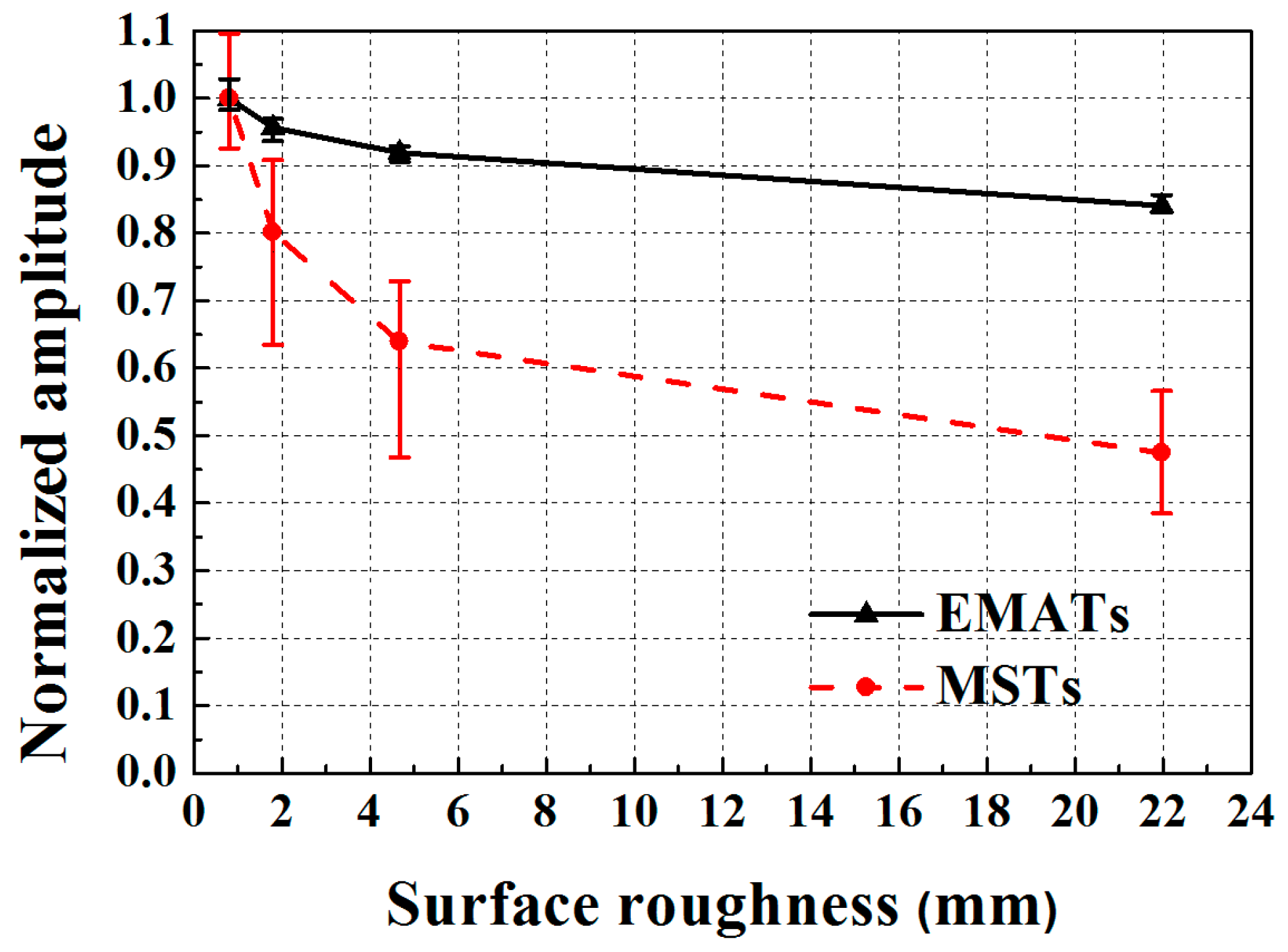
6.3. Test 3: Influence of Surface Roughness on Transduction Efficiency
6.4. Summary
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lambert, J.D.; Bakhtiari, S.; Bodnar, I.; Kot, C.; Pence, J. Extended in-situ and Real Time Monitoring Task 3: Long-Term Dry Cask Storage of Spent Nuclear Fuel; ANL/NE-12/18; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2012.
- Meyer, R.M.; Pardini, A.F.; Cuta, J.M.; Adkins, H.E.; Casella, A.M.; Qiao, A.; Larche, M.; Diaz, A.A.; Doctor, S.R. NDE to Manage Atmospheric SCC in Canisters for Dry Storage of Spent Fuel: An Assessment; PNNL-22495; U.S. Department of Energy: Washington, DC, USA, 2013.
- Fuhr, K.; Gorman, J.; Broussard, J.; White, G. Failure Modes and Effects Analysis (FMEA) of Welded Stainless Steel Canisters for Dry Cask Storage Systems; EPRI Report 3002000815; Electric Power Research Institute: Palo Alto, CA, USA, 2013. [Google Scholar]
- Lissenden, C.J.; Choi, S.; Cho, H.; Motta, A.; Hartig, K.; Xiao, X.; Le Berre, S.; Brennan, S.; Reichard, K.; Leary, R.; et al. Robotic inspection of dry storage casks for spent nuclear fuel. In Proceedings of the American Society of Mechanical Engineers (ASME) Pressure Vessels & Piping (PVP) Conference, Vancouver, BC, Canada, 17–21 July 2016.
- Sindelar, R.L.; Duncan, A.J.; Dupont, M.E.; Lam, P.-S.; Louthan, M.R., Jr.; Skidmore, T.E. Materials Aging Issues and Aging Management for Extended Storage and Transportation of Spent Nuclear Fuel; NUREG/CR-7116, SRNL-STI-2011-00005; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2011.
- Caseres, L.; Mintz, T.S. Atmospheric Stress Corrosion Cracking Susceptibility of Welded and Unwelded 304, 304L, and 316L Austenitic Stainless Steels Commonly Used for Dry Cask Storage Containers Exposed to Marine Environments; NUREG/CR-7030; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2010.
- He, X.; Mintz, T.S.; Pabalan, R.; Miller, L.; Oberson, G. Assessment of Stress Corrosion Cracking Susceptibility for Austenitic Stainless Steels Exposed to Atmospheric Chloride and Non-Chloride Salts; NUREG/CR-7170; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2014.
- Chopra, O.K.; Diercks, D.R.; Fabian, R.R.; Han, Z.H.; Liu, Y.Y. Managing Aging Effects on Dry Cask Storage Systems for Extended Long-Term Storage and Transportation of Used Fuel Rev. 2; ANL-13/15, FCRD-UFD-2014-000476; U.S. Department of Energy: Washington, DC, USA, 2014.
- Xie, Y.; Zhang, J. Chloride-induced stress corrosion cracking of used nuclear fuel welded stainless steel canisters: A review. J. Nucl. Mater. 2015, 466, 85–93. [Google Scholar] [CrossRef]
- Black, B.P. Effect of residual stress on the life prediction of dry storage canisters for used nuclear fuel. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Kusnick, J.; Benson, M.; Lyons, S. Finite Element Analysis of Weld Residual Stresses in Austenitic Stainless Steel Dry Cask Storage System Canisters; Technical Letter Report, ML13330A512; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2013.
- Enos, D.G.; Bryan, C.R. Status Report: Characterization of Weld Residual Stresses on a Full-Diameter SNF Interim Storage Canister Mockup; SAND2015-7068 R, FCRD-UFD-2015-00123; U.S. Department of Energy: Washington, DC, USA, 2015.
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridege, UK, 2014. [Google Scholar]
- Ratassepp, M.; Lowe, M.J.S.; Cawley, P.; Klauson, A. Scattering of the fundamental shear horizontal mode in a plate when incident at a through crack aligned in the propagation direction of the mode. J. Acoust. Soc. Am. 2008, 124, 2873–2882. [Google Scholar] [CrossRef] [PubMed]
- K & J Magnetics, Inc. Available online: www.kjmagnetics.com (accessed on 12 October 2016).
- Axon’ Design and Manufacture Innovative Cabling, Interconnect Solutions, Cable Assemblies, Connectors and Mini Systems for High Tech Applications. Available online: www.axon-cable.com (accessed on 12 October 2016).
- Ribichini, R.; Cegla, F.; Nagy, P.B.; Cawley, P. Study and comparison of different EMAT configurations for SH wave inspection. IEEE Trans. UFFC 2011, 58, 2571–2581. [Google Scholar] [CrossRef] [PubMed]
- Petcher, P.A.; Dixon, S. Weld defect detection using PPM EMAT generated shear horizontal ultrasound. NDT E Int. 2015, 74, 58–65. [Google Scholar] [CrossRef]
- Lindsey, M.S.; Khajeh, E.; Van Velsor, J.K.; Lissenden, C.J.; Rose, J.L. In-line corrosion inspection using circumferential and longitudinal ultrasonic guided waves. In Proceedings of the Review of Progress in Quantitative Nondestructive Evaluation, San Diego, CA, USA, 18–23 July 2010.
- Gao, H.; Ali, S.M.; Lopez, B. Inspection of austenitic weld with EMATs. In Proceedings of the Review of Progress in Quantitative Nondestructive Evaluation, Kingston, RI, USA, 26–31 July 2009.
- Kwun, H.; Bartels, K.A. Magnetostrictive sensor technology and its applications. Ultrasonics 1998, 36, 171–178. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transducer Component | Transducer Type | Purpose | Candidate Materials | Elevated Temperature | Gamma Radiation Resistance |
|---|---|---|---|---|---|
| Permanent magnets | EMAT and MST | Generate a static magnetic field | Rare earth alloys like neodymium, samarium cobalt | Select carefully | Good |
| Electrical coil | EMAT and MST | Provide an alternating electric field | Metal conductors like copper, silver | Good | Good |
| Backing | EMAT and MST | Electrical insulation for coil | Polymers like Polyimide, peek | Select carefully | Select carefully |
| Magneto-strictive foil | MST | Energy conversion | Ferrous metals and alloys like remendur, iron | Good | Good |
| Mode | Plate Thickness (mm) | Phase Velocity (m/s) | Group Velocity (m/s) |
|---|---|---|---|
| SH1 | 15.9 | 3471 | 2915 |
| 12.7 | 3675 | 2753 | |
| SH2 | 15.9 | 5305 | 1908 |
| 12.7 | - | - |
| Surface Roughness (μm) | |||
|---|---|---|---|
| Surface No. | Min. | Max. | Avg. |
| #1 | 0.776 | 0.869 | 0.811 |
| #2 | 1.722 | 1.841 | 1.798 |
| #3 | 4.64 | 4.707 | 4.675 |
| #4 | 20.708 | 22.664 | 21.981 |
| Variable | Values | |
|---|---|---|
| Test 1 | Normal force | 0~267 N in 22.25 N increments |
| Test 2 | Surface debris | zero and many glass beads (for EMATs) zero and a few glass beads (for MSTs) |
| Test 3 | Surface roughness | 0.811, 1.798, 4.675, and 21.981 μm |
| EMATs | MSTs | |
|---|---|---|
| Advantages | - Low sensitivity to surface debris and surface roughness | - High amplitude and SNR of SH wave signal |
| Disadvantages | - Low amplitude and SNR of SH wave signal - Requirement to maintain a uniform lift off to provide consistent transduction | - Requirement of a relatively large normal force to excite and receive SH waves through dry fractional coupling - SH wave amplitude dependence on the normal force value and the degree of surface roughness - Limited operation on the surface where friction-reducing debris are present |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.; Cho, H.; Lissenden, C.J. Selection of Shear Horizontal Wave Transducers for Robotic Nondestructive Inspection in Harsh Environments. Sensors 2017, 17, 5. https://doi.org/10.3390/s17010005
Choi S, Cho H, Lissenden CJ. Selection of Shear Horizontal Wave Transducers for Robotic Nondestructive Inspection in Harsh Environments. Sensors. 2017; 17(1):5. https://doi.org/10.3390/s17010005
Chicago/Turabian StyleChoi, Sungho, Hwanjeong Cho, and Cliff J. Lissenden. 2017. "Selection of Shear Horizontal Wave Transducers for Robotic Nondestructive Inspection in Harsh Environments" Sensors 17, no. 1: 5. https://doi.org/10.3390/s17010005