1. Introduction
Currently, mobile satellite systems (MSSs), adopting Geostationary (GEO) and Non-Geostationary (NGEO) orbits such as Low-altitude Earth Orbits (LEO) and Medium-altitude Earth Orbits (MEO), have attained a renewed R&D interest and market opportunities with extensive application in providing communication services to fixed or mobile users for a vast range of sectors (e.g., land-mobile, aeronautical, maritime, military and disaster relief, etc.), especially in the scenario of terrestrial communication infrastructure congested or gusty paralysis.
Each orbit has some desirable properties as well as a set of drawbacks for efficient service delivery. Due to the concerns regarding the ease of use of large-sized terminals equipped with large antennas and power supplies as handsets, as well as the need for direct radio communications between the user located anywhere around the world, it leads to the idea of using low earth orbit (LEO) satellites at a height between 500 km and 2000 km of altitude rather than the geostationary orbit. Besides, in the case of delay sensitive application, LEO-based MSSs have a typical end-to-end propagation delay of 20–25 ms, which is comparable to the delay of a terrestrial link. On the other hand, considering the mobility issue and the number of LEO satellites required for global coverage, network management becomes more complex and more costly. According to the orbit types, Paolo Chini summarized some basic features of the operational GEO based MSSs and non-GEO based MSSs (i.e., the GEO-based systems of Inmarsat BGAN (Broadband Global Area Network), Thuraya, ACeS (Asia Cellular System), Eutelsat & SES Astra (Solaris Mobile, Pairs, France), Hispasat, MSV (Mobile Satellite Ventures) and TerreStar (Reston, VA, USA); the LEO-based systems of Iridium, Globalstar and Orbcom; MEO-based systems of ICO (Intermediate Circular Orbit)). Details of the satellite orbit, user link frequency bands, physical layer, multiple access, satellite features and ISL can be found in [
1,
2,
3].
However, these systems are spectrum limited due to the static spectrum allocation policies at present. Frequency bands for MSSs are assigned at the World Radiocommunication Conferences (WRCs), which is organized by International Telecommunication Union-Radiocommunication sector (ITU-R), periodically. Although the rapid growth demands for the increasing wide band and data services have promoted the application of Ku/Ka band for MSSs [
4], almost all of the operational MSSs regard L/S band as the preferential frequency resources since they permit small onboard antennas due to better foliage penetration and smaller impact of atmospheric affects [
5,
6]. According to the final documentation of WRCs held in Geneva, Switzerland, 2012 (WRC-12) [
7], the allocation of L/S band for mobile satellite services promulgated by ITU Radio Regulation (ITU-RR) is described in
Table 1. In order to reuse frequency and alleviate interference, ITU-RR divides the earth into three regions: Regions I, II and III.
The statistical results of
Table 1 used by the incumbent systems shows that the scarcity of L/S frequency resources makes it impossible for another planned global or even regional mobile satellite system to seek for a completely pure L/S band, which has attained pervasive attention in those countries who are not in possession of such independently controllable system. In fact, satellite frequency of interest may be not used at a particular geographic location or at a particular time. Thus, exploring efficient spectrum sharing techniques to enhance spectral efficiency in future MSSs without interfering to the operational services has become an important research challenge.
Cognitive radio (CR) proposed by Joseph Mitola is identified as the promising technology to improve the utilization efficiency of the available spectrum [
8,
9]. As the core function of CR, spectrum sensing enables the secondary user (SU) to adapt to the detected underutilization spectrum without causing interference to primary user (PU) [
10,
11]. Thus, in terms of discovering the vacant spectrum, CR will provide a competitive approach to obtain frequency for MSSs autonomously. Recently, the application of CR in hybrid/integrated Satellite-Terrestrial communication systems has received important attention lately in the research community. In 2012, Biglieri et al. [
12] summarized research papers devoted to the application of CR to satellite communications from 2007 to 2012, with special attention to the implementation of the spectrum sensing technique; Hoyhtya et al. [
13] introduced three application scenarios involving satellite acts PU or SU within the terrestrial system and defined the operational limits for interference management in the aforementioned scenarios regarding spectrum sensing. Based on the foregoing, it can be concluded that the application of CR techniques to satellite communication systems has obvious potential to improve spectral efficiency. Concretely, Dimc et al. [
14] performed spectrum sensing to find the signal of GSM Thuraya mobile satellite system for both uplink and downlink communication in the frequency ranges 1626.5–1660.5 MHz and 1525–1559 MHz, respectively. Clark et al. [
15] considered a real-world scenario involving spectrum sharing between terrestrial mobile wireless and meteorological satellite services in the band of 1695–1710 MHz with the total 15 MHz bandwidth. Hoyhtya [
16] focused on the secondary use of the satellite spectrum in the band of 2.17–2.2 GHz by a terrestrial system accompanied by 30 MHz bandwidth. Khan et al. [
17] presented cyclostationary analysis of real time satellite signals and its detection technique within a bandwidth of 4 MHz, in which the signal of interest is scanned and captured. These studies focused on the spectrum sharing within narrow band in the scenario of single satellite system. Furthermore, in 2015, Maleki et al. [
18] investigated the potential of applying CR techniques in the scenario of Ka band multibeam satellite communications to increase the spectrum opportunities for future generations of satellite networks without interfering with the operation of incumbent services, in which the spectrum opportunities can potentially amount to 2.4 GHz of bandwidth in the downlink and 2 GHz of bandwidth in the uplink for fixed satellite services. However, those explorations of CR applied in satellite communication system from the latest scientific literature face the problem of sensing technology implementation in wideband signal detection.
Actually, wideband sensing techniques are required for detecting wideband satellite signals. The most representative solution is based on filter banks to actualize spectrum sensing in each narrowband at a time. However, this approach requires a large number of RF components and introduces large latency [
19,
20]. Besides, current analog-to-digital hardware technology faces tremendous challenge posed by conventional spectral estimation method, which operates equal or greater than the Nyquist sampling rate. As the efficient method to achieve real-time spectrum estimation of wideband signal at a sub-Nyquist sampling rate, compressed sensing (CS) combined sampling with compression operations has obtained substantial research efforts. The compressed sampling theory points out that any sparse signal can be compressed and sampled simultaneously [
21]. Preliminary work has been done to exploit CS for wideband spectrum sensing based upon signal sparsity in frequency domain. Tian et al. [
22] firstly carried out the work to take advantage of CS theory to acquire wideband signals using sub-Nyquist sampling rate. Recently, Duarte et al. [
23] presented a structured compressed sensing. Leus et al. [
24] proposed a power spectrum blind sampling (PSBS) algorithm trying to reconstruct power spectrum. While the CS literature has intensely focused on problems in signal reconstruction or approximation typically relying on the assumption of sparsity, it is frequently necessary that signals are acquired only for the purpose of making detection in many signal processing applications without reconstructing the signal [
25]. In terms of the application of SS in satellite communications due to the spectrum scarcity, only when the wideband signal of primary system is found absent can the SU utilize the spectrum for transmission. In this context, wideband spectrum sensing is equivalent to wideband signal detection. Hence, CS-based wideband signal detection approach, which places no assumptions on the signals being sparse or compressible, provides more spectrum access opportunities for SU with sufficient protection to PU.
The sensing performance of a single node may degrade in wireless channels for several reasons such as the hidden node problem, shadowing, multipath fading, and interference/noise uncertainty. To address these issues, various collaborative spectrum sensing (CSS) schemes among multiple secondary users have been proposed [
10,
26,
27,
28,
29,
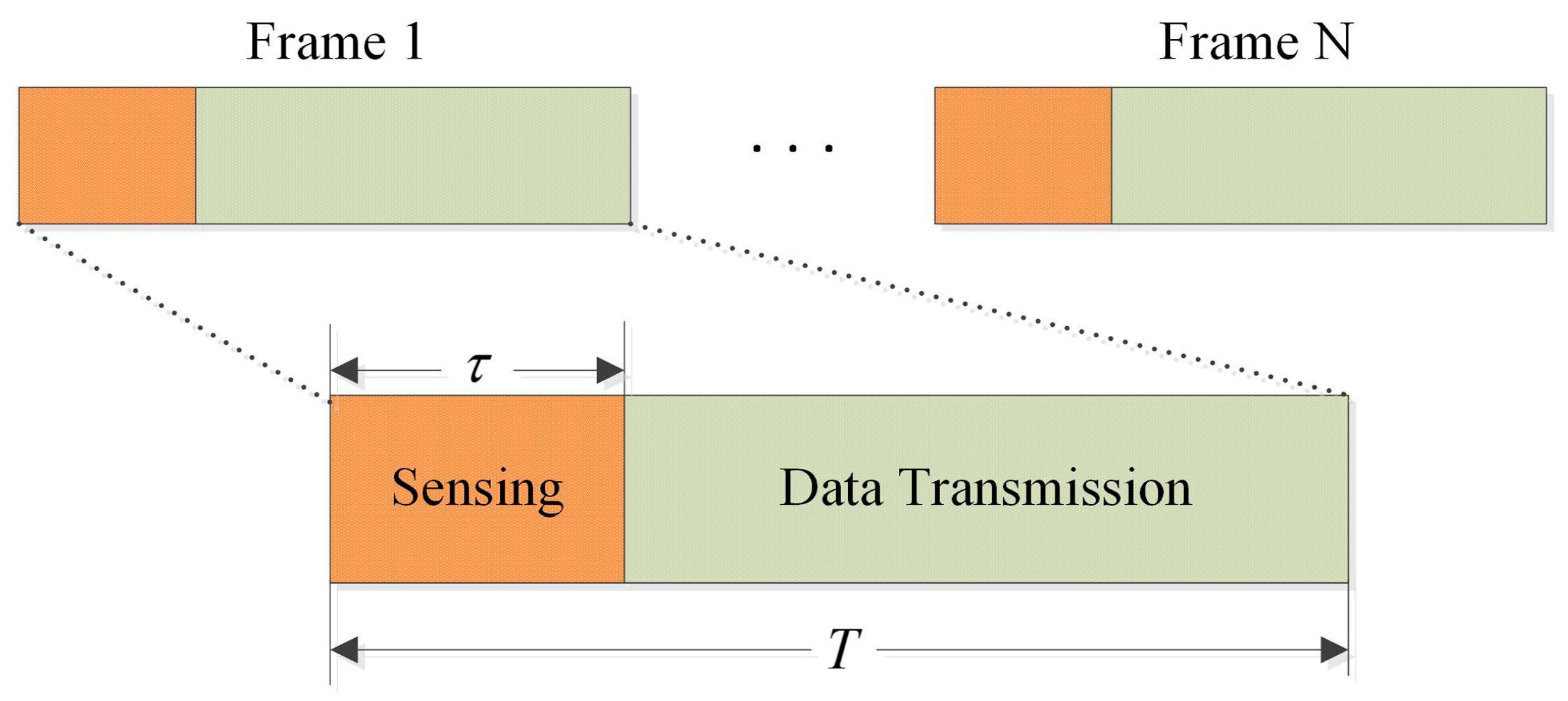
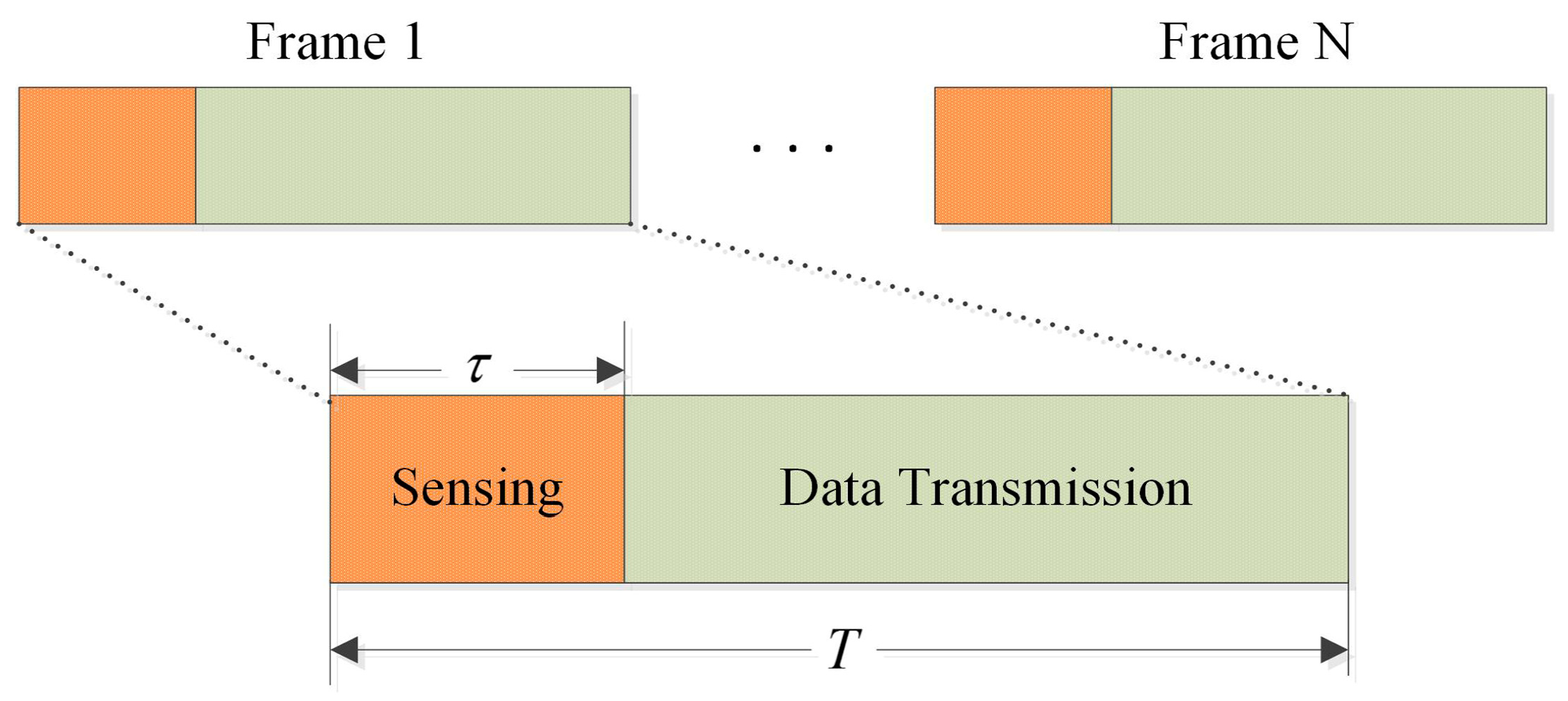
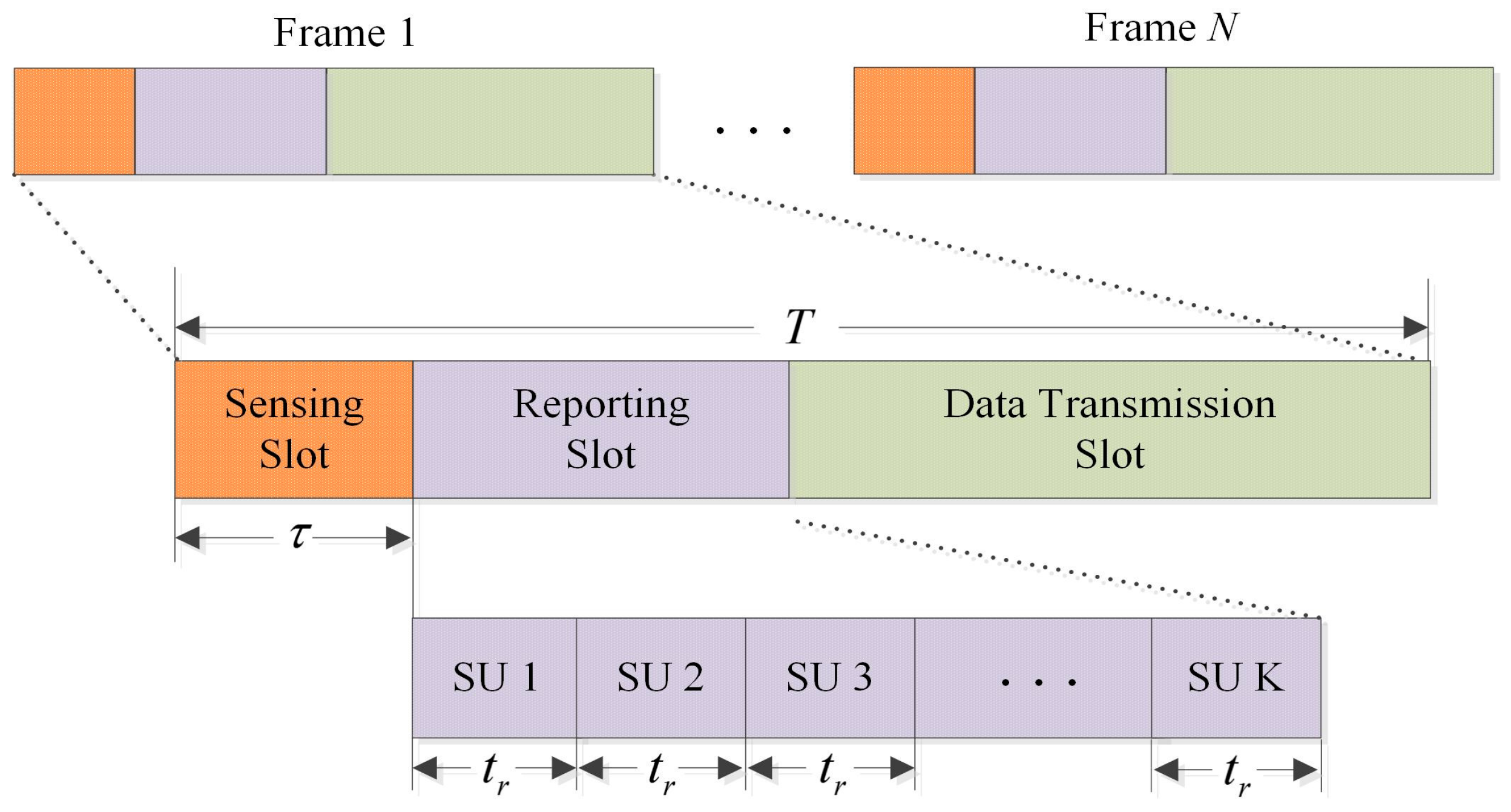
30], in which several nodes collaborate with each other to enhance the overall sensing performance. According to the frame structure of periodic spectrum sensing (PSS) [
31,
32], the sensing time has a direct impact on the sensing performance, such as the probabilities of detection and false alarm, which also affects the data transmission of SU because it determines transmission duration when frame length is fixed. Therefore, there exists a tradeoff between sensing time and transmission duration. The optimal sensing time varies with different optimization objectives. Peh et al. [
33] proposed joint optimization of the sensing time and the parameter of CSS scheme to maximize the throughput of the SU. Shi et al. [
34] considered a joint design of energy efficient sensing and transmission duration for CR system. Hu et al. [
35] investigated the efficient spectrum sensing time with the optimization of transmission delay. Lee et al. [
36] developed a theoretical framework to optimize the sensing parameters, in such a way as to maximize the sensing efficiency subject to interference avoidance constraints. Additionally, Min et al. [
26] proposed a weighted bandwidth-based cooperative spectrum sensing scheme for satellite communication systems to detect PU in time throughout the whole frame at the cost of degraded spectrum utilization efficiency. To the best of our knowledge, most of the academic and industrial activities are concerning CR in terrestrial wireless communication network for the scenario of narrowband cooperative spectrum sensing. The metrics of spectral efficiency deserves further investigation and discussion, since it becomes particularly important for LEO MSSs due to the scarcity of frequency resources.
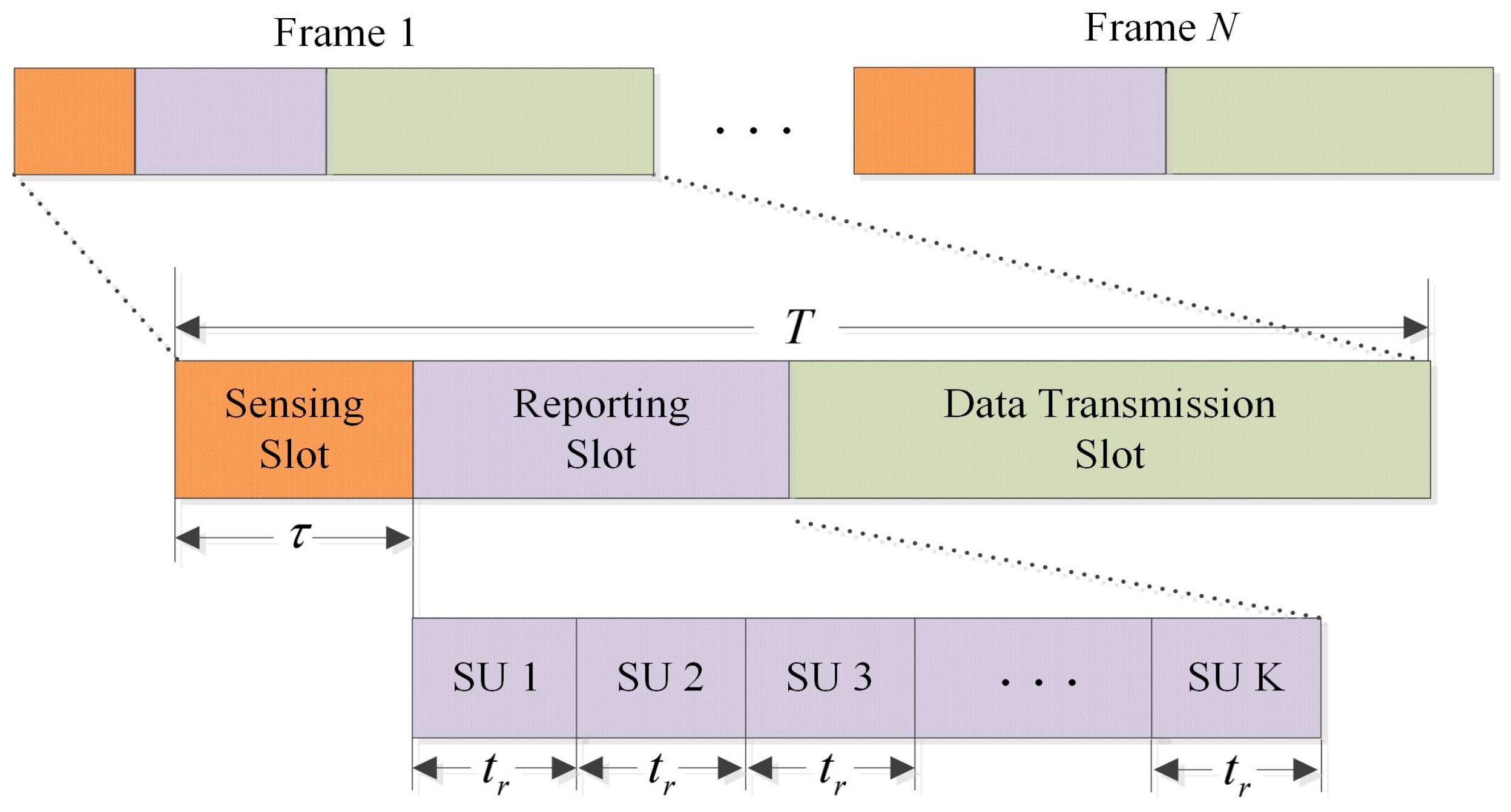
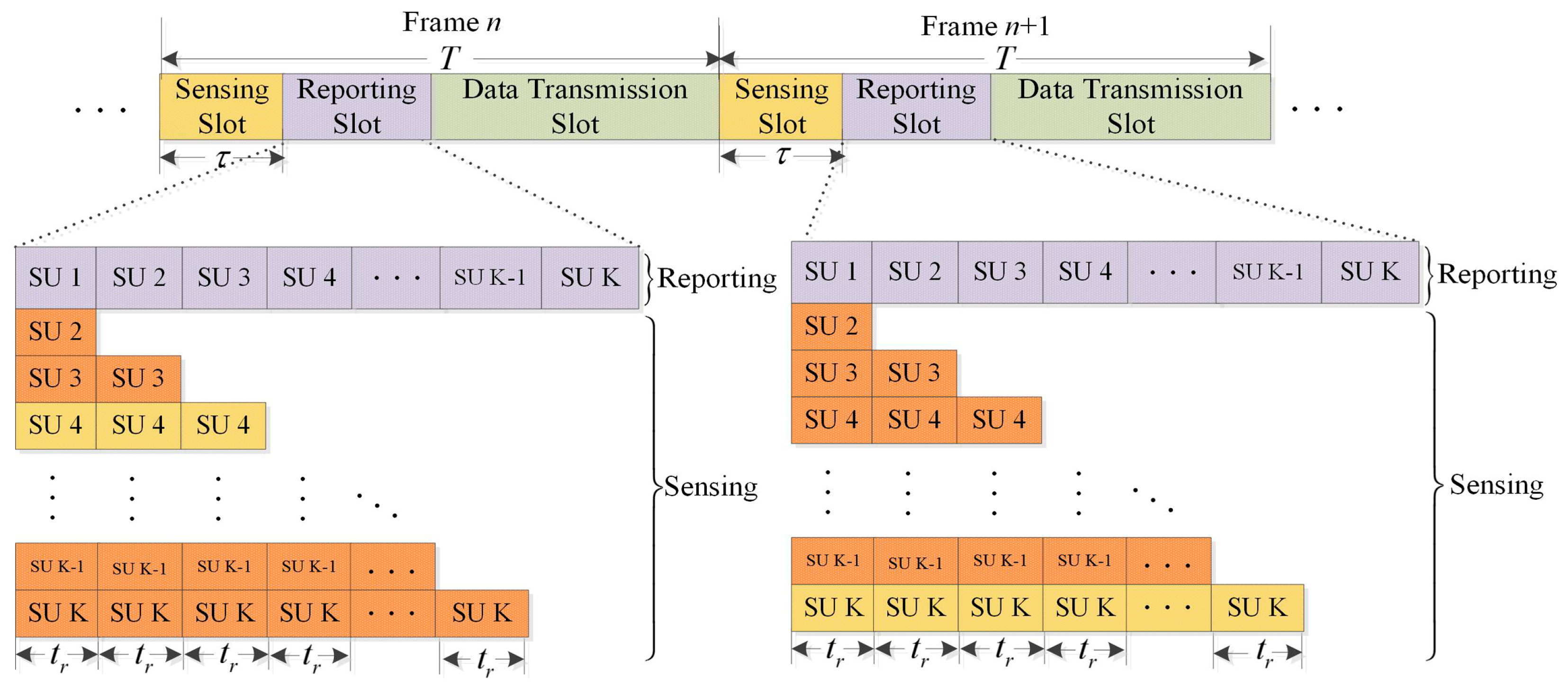
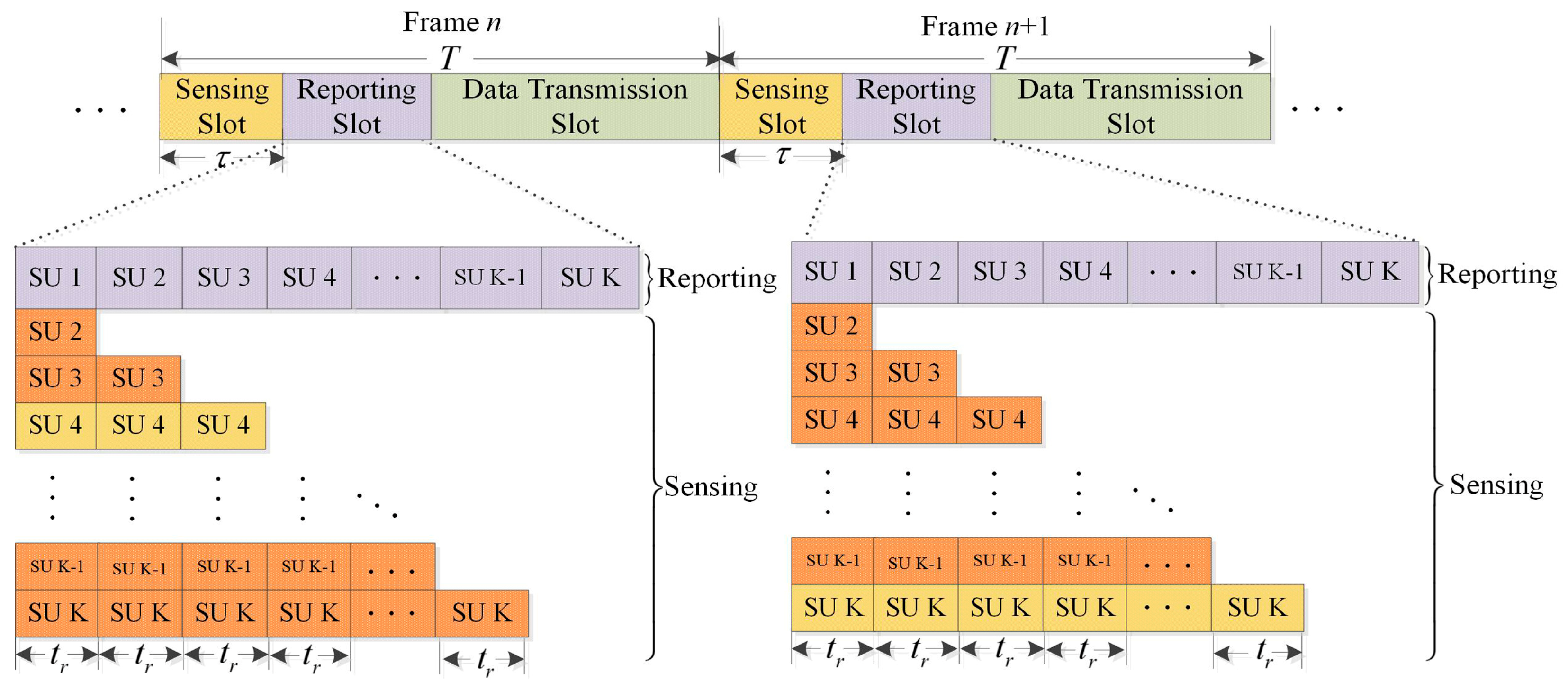
This paper mainly investigates the problem of joint designing the compressed sensing time and the parameters (i.e., hard decision fusion threshold, scheduling strategy and number of cooperative SU) of CSS scheme to maximize the spectral efficiency of SU, subject to adequate protection to PU. The main contributions of this paper are as follows. Firstly, we establish the wideband spectrum sensing model based on compressed detection. After compressed sensing, each SU makes local decision (i.e., “1” for presence, “0” for absence) and reports to the fusion center (FC), where counting fusion rule is employed to reach a global decision based on the sensing results. It is proven that SU spectral efficiency is unimodal convex function of compressed sensing time τ. Moreover, inspired by the previous general CSS frame structure, we propose a novel wideband cooperative spectrum sensing (CSS) framework in which each SU reporting duration can be utilized for its following SU sensing. The sensing performance benefits from the novel CSS frame structure because the equivalent sensing time is extended by making full use of reporting time. Additionally, the spatiotemporal CSS (ST-CSS) scheme is designed to achieve space and time diversity gain simultaneously for time-varying channel without introducing additional time overhead. Finally, via computer simulations, it is shown that the proposed CSS framework with optimal settings of sensing time and fusion scheme significantly improves SU spectral efficiency.
The rest of this paper is organized as follows.
Section 2 describes the system model. Then,
Section 3 introduces the novel cooperative spectrum sensing framework. In
Section 4, the optimal settings for the novel ST-CSS with counting fusion rule under sufficient protection to PU is presented. Extensive simulation results are provided in
Section 5 to validate the performance of the proposed scheme. Finally, conclusions are drawn in
Section 6.
2. System Model
It is observed from the scenarios described in [
12,
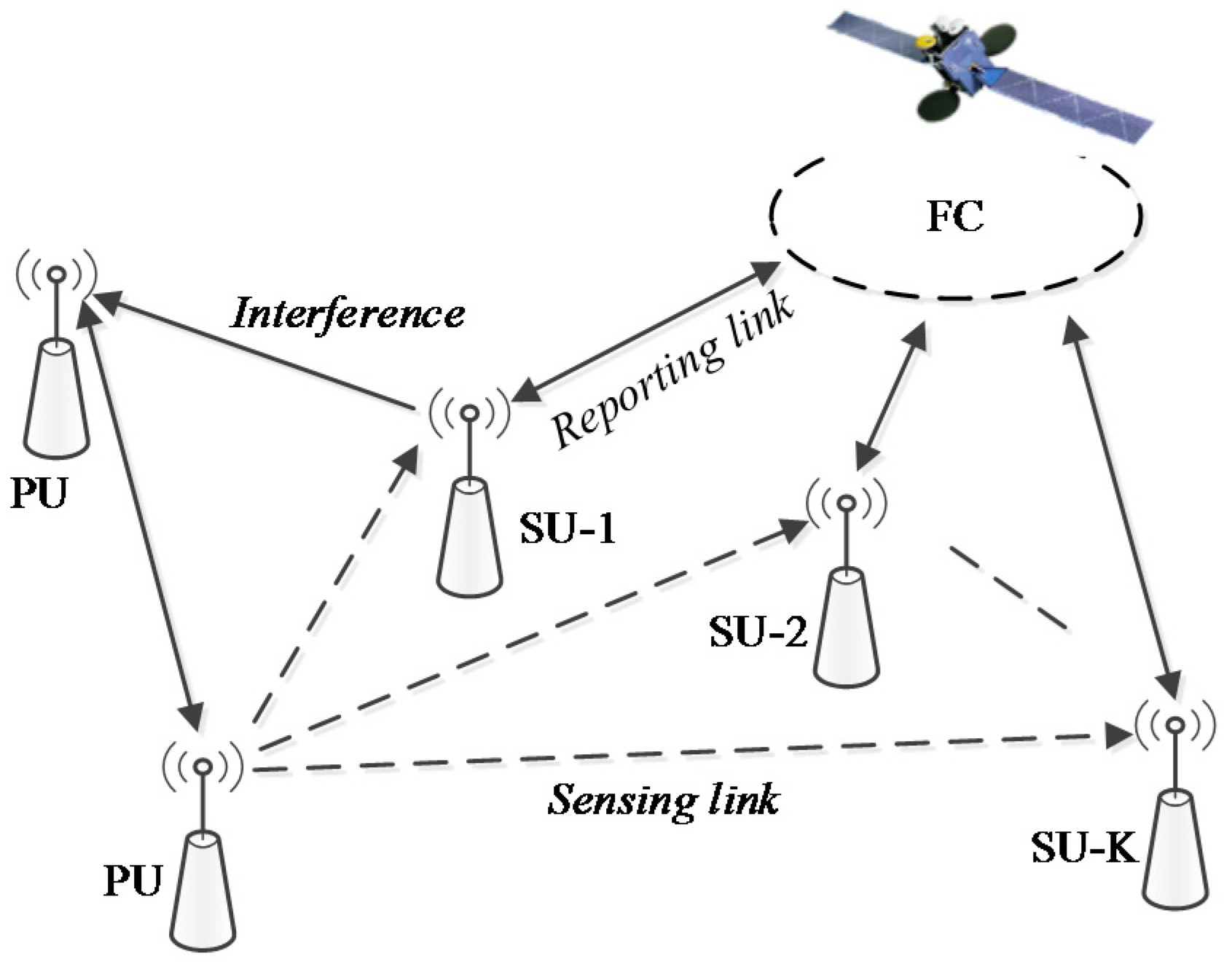
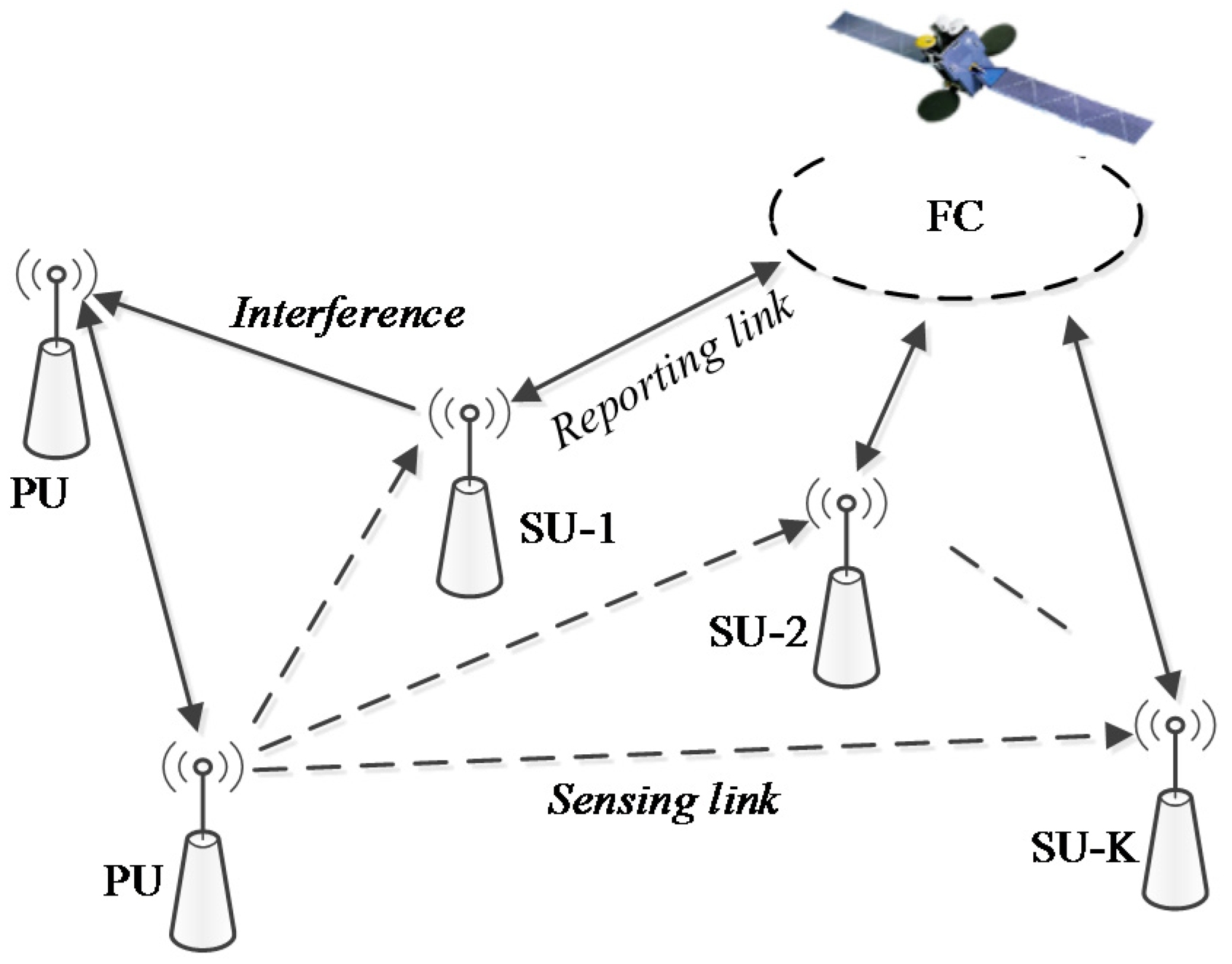
13] that satellites can be provided on a secondary basis, and the primary services can be either terrestrial or satellite-based. The architecture and system model of CSS for LEO mobile satellite services is established as depicted in
Figure 1. We consider the CR network consisted of K SUs (i.e., earth stations or sensors) and one LEO satellite (i.e., FC), which are taken as secondary system. Besides, the primary system is composed of PU licensed in the incumbent satellite services or terrestrial networks operating in the same spectrum, such as 3G mobile telephony, LTE, WiMax and WiFi. We define two types of links that we call sensing link (i.e., from PU to SU) and reporting link (i.e., from SU to FC). In this system model, there are broadly three steps: first, each SU implements local sensing to independently detect the presence or absence of PU via sensing link; second, SU reports the detection result to FC through reporting link; and third, FC combines the results with hard counting fusion rule [
35,
37] to make a global decision about the state of primary system and then reports back to SU. Only when the primary system is detected to be idle can the SU use the licensed frequency for transmission. Once any of PU activity is found, the secondary system must fleetly vacate the spectrum to avoid interference to PU.
We assume that all the SUs in the coverage of satellite can sense the PU. The signals received at SU may come from terrestrial or satellite-based primary users spreading over a wide band. The employed CS-based approach has been developed to detect PU using sub-Nyquist rate samples to reduce the burden on the ADC in wideband spectrum sensing (WSS). In the compressed settings, the problem of PU detection can be formulated as a testing of two hypotheses: one is Hypothesis
when PU is absent, the other is hypothesis
when PU is present. The problem now is converted to distinguish between
and
in the following way:
where
is an
compressive-sampled received signal.
is a compressive measurement matrix, i.e.,
, which can be generated by Gaussian random matrices, Bernoulli random matrices, database-friendly matrices and random orthoprojection to
.
and
are positive integer that depict size of the vector and matrix.
is an
primary signal vector, and
with power
,
is Additive White Gaussian Noise (AWGN) which is assumed as independent and identically distributed (i.i.d.) random process with zero mean and variance
, i.e.,
,
is the channel gain between SU and PU. For our hypotheses, the joint probability distribution function (PDF) of compressed samples of received signal under hypothesis
and
can be derived as following:
According to the likelihood ratio test of Neyman–Pearson (NP) optimal decision rule [
38,
39]:
After taking logarithms on both sides, we can obtain an equivalent test that simplifies as:
We now define the output of the compressive detector as:
Since
is a complete statistic for our detection problem, it contains complete information required to determine between
and
. It is easy to prove that the PDF of
ν can be approximated expressed by Gaussian distribution as follows:
Thus, the false alarm probability
and detection probability
at SU can be computed by:
where the function
. From Equation (9), with target detection probability
to provide sufficient protection to PU,
is related
to as follows:
Firstly, considering a special case in which is an orthoprojector (i.e., ), Theorem 1 gives the bound of the compressive detector performance.
Theorem 1. Let be random orthoprojector. Then, with probability at least of .
where ,
,
the compressed sensing SNR , and compression ratio .
Proof.
Since
is an orthoprojector, Equation (11) can be rewritten:
Based on the Johnson–Lindenstrauss (JL) lemma [
31], then with probability at least
,
Combining Equations (13) and (14), the result follows. □
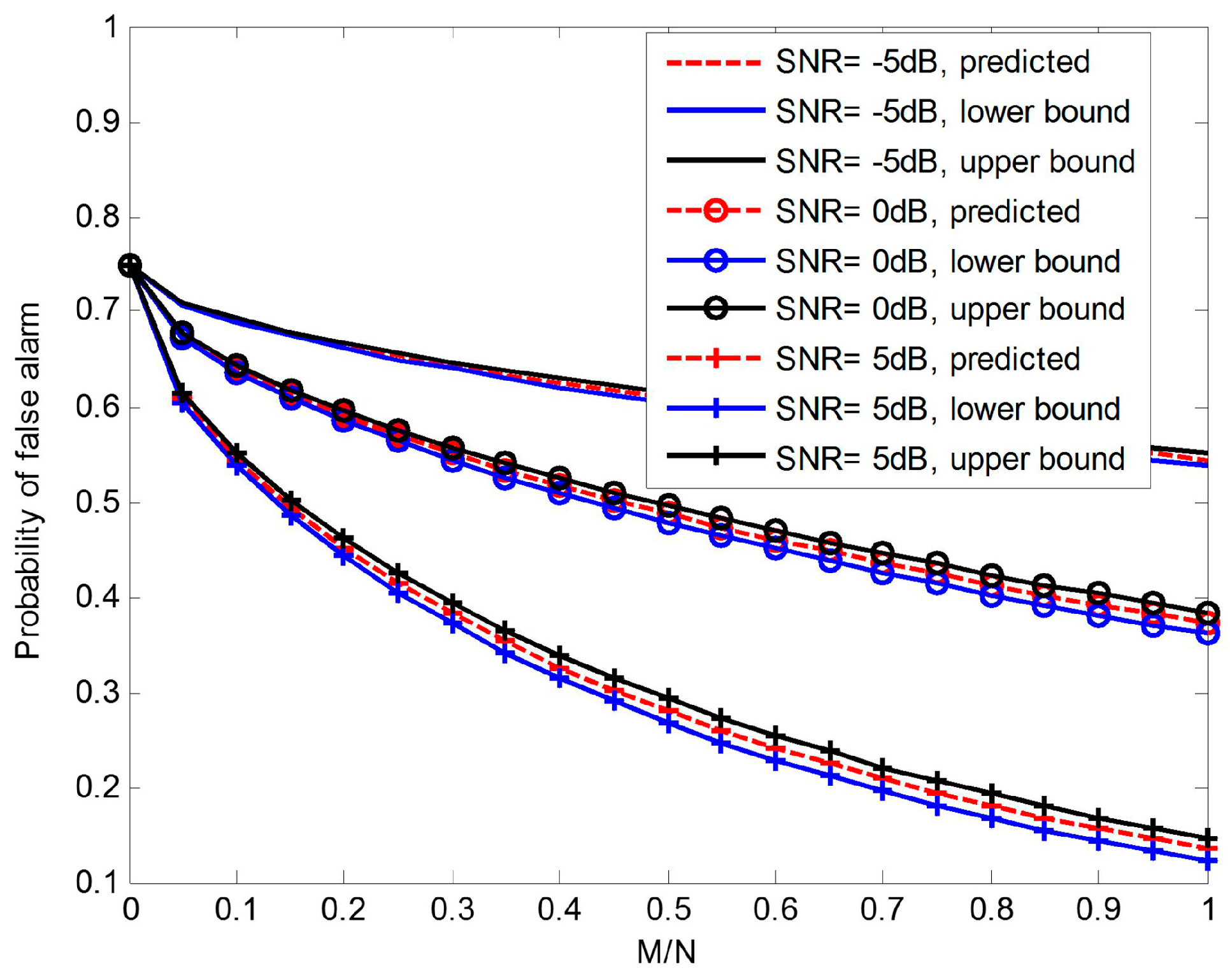
It can be concluded that Equation (12) tells us how much information we lose via compressed samples in terms of our ability to solve our detection problem, precisely. Moreover, it is absolutely feasible to use Equation (15) to predict the probability of false alarm because
is so small that the impact on
can be neglected with high probability. Although, for a given instance of
, the curve of relationship between
and compression ratio
may be better or worse than the predicted curve by Equation (15).
Obviously, it is tightly concentrated around the expected performance curve as shown in
Figure 2.
Additionally, large numbers of trials of methods based on random orthoprojector, matrices with independent Gaussian entries and matrices with independent Bernoulli entries show that there is almost no difference among these three methods, and all perform highly consistent with expected. Actually, it is not necessary to limit to be orthoprojector to satisfy the foregoing Theorem 1 and Equation (15).
During local compressed sensing, the
i-th SU makes a binary decision (i.e., “1” for presence and “0” for absence) with probabilities of detection
and false alarm
. Then, the FC combines all “one bit” decisions to make a global decision on the state of PU according to the hard counting fusion rule: if
, decide
; else if
, decide
, where
is the number of SU which reports presence of PU, and
is the decision threshold at FC. The expressions for cooperative false alarm probability
and cooperative detection probability
will be given as:
In general, the counting fusion rule is broadly classified as OR fusion rule (OFR), AND fusion rule (AFR) and MAJORITY fusion rule (MFR).
For AFR,
takes
, we have:
For OFR,
takes 1, we have:
For MFR,
takes the minimum integer greater than or equal to
, denoted by
. If
, decide
; else if
, decide
, and
is the decision threshold at fusion center (FC). Then, we have:
5. Simulation Results
This section provides extensive computer simulations carried out jointly using STK and MATLAB to evaluate the performance of SU spectral efficiency for the proposed spectrum sensing scheme. For analysis, we have considered the number of cooperating SUs is unless otherwise stated. The prior probabilities of presence and absence of PU are set to be and . We suppose that the number of samples collected by each SU is N = 1000, and compressed domain sampling frequency is fs = 10 KHz. The PU’s power is dBmW, the noise power dBmW the channel gain between PU and i-th SU obeys the Rayleigh distribution with mean dB, the channel gain among SU g = 0 dB. For the novel CSS scheme, the frame duration is T = 200 ms, in which the single reporting duration tr = 1 ms when the information transmission rate from SU to FC is assumed to be 1 kbps. The chosen LEO height is h = 1000 km, and the feedback slot is approximately given as t0 = 10 ms taking space propagation delay and final decision-making delay into account.
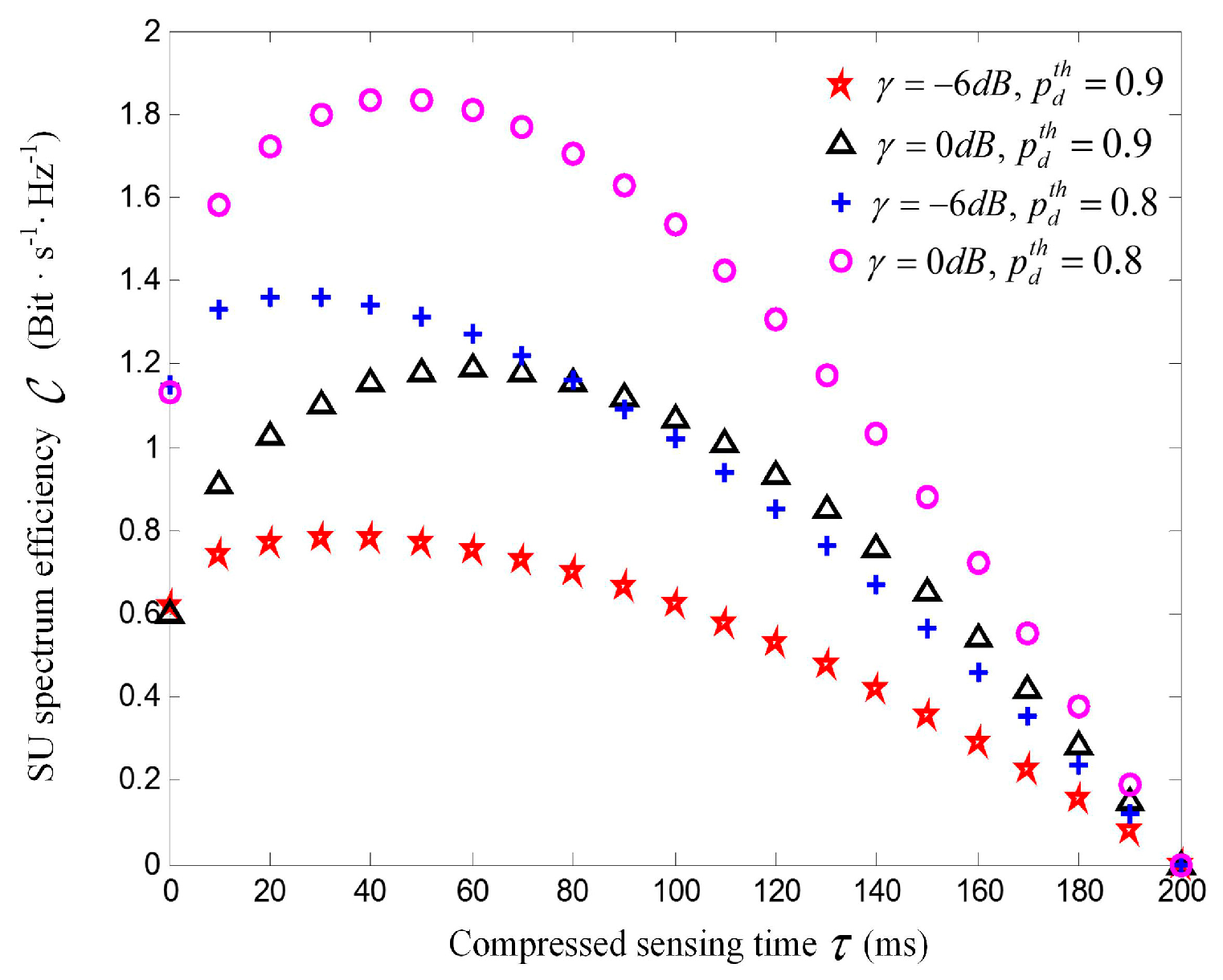
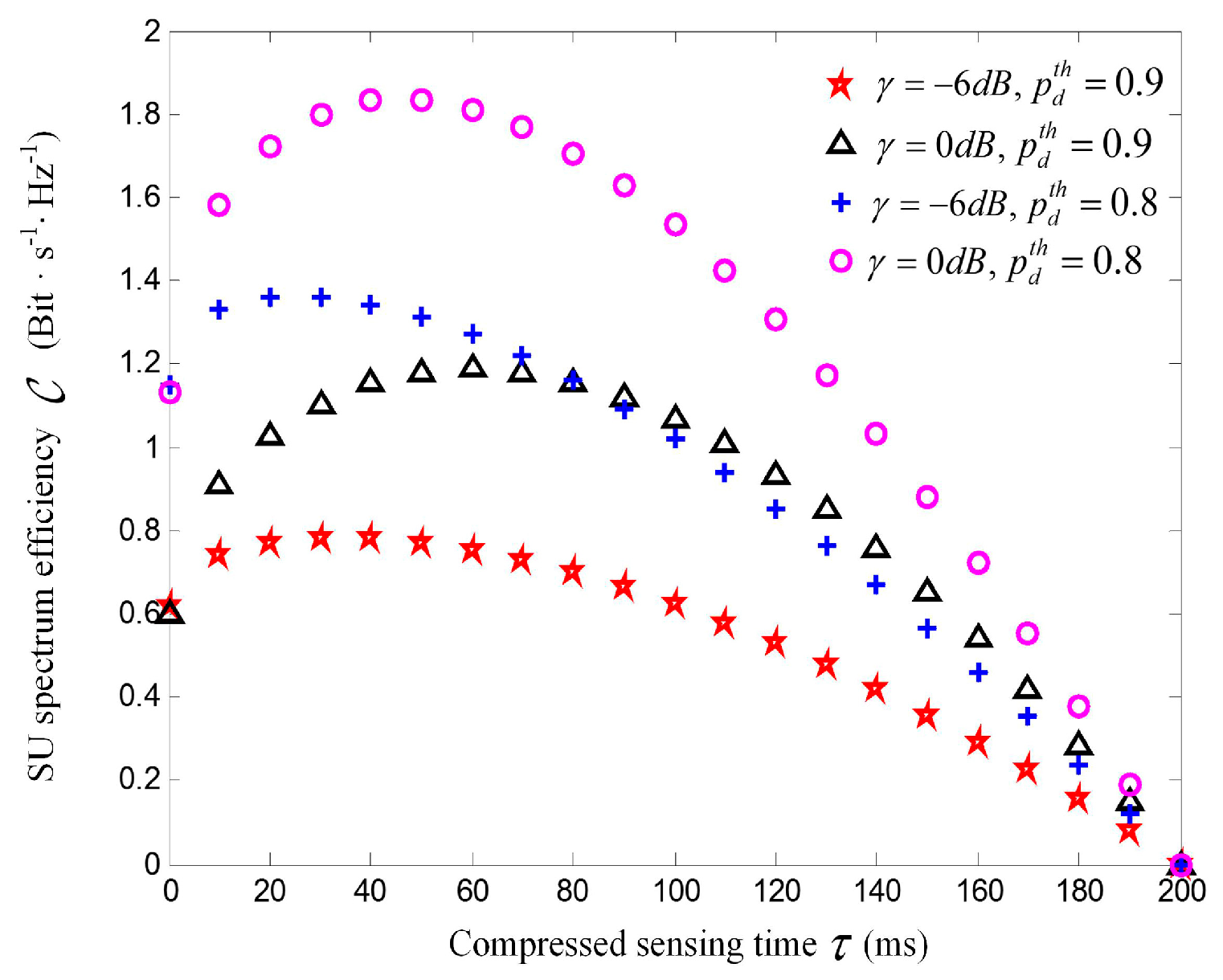
Figure 6 shows SU spectrum utilization efficiency versus the compressed sensing time allocated to each SU. The simulation results validate that SU spectral efficiency
is the unimodal convex function with regard to compressed sensing time
. There indeed exits one optimal point
standing in the curve that maximizes the SU spectral efficiency. We can see that the spectral efficiency increases as
increases from 0 to
, whereas decreases when
is increased further. This is because little sensing time τ degrades sensing performance, while long sensing time τ results in short transmission duration. For a given SNR,
decreases with increased targeted detection probability. Particularly, for SNR = −6 dB, the maximal spectrum efficiency is 1.4 Bits·s
−1·Hz
−1 when target detection probability is 0.8, while it is only 0.8 Bits·s
−1·Hz
−1 and 0.5 Bits·s
−1·Hz
−1 when target detection probability is 0.9 and 0.95, respectively, which denotes that SU spectrum utilization decreases with debasement of the interference to PU. It can also be seen that optimal sensing time
increases with the increase of SNR values. Taking
for example, when SNR = −6 dB,
30
ms to achieve the maximal spectral efficiency; when SNR = 0 dB,
60
ms to achieve the maximal spectral efficiency.
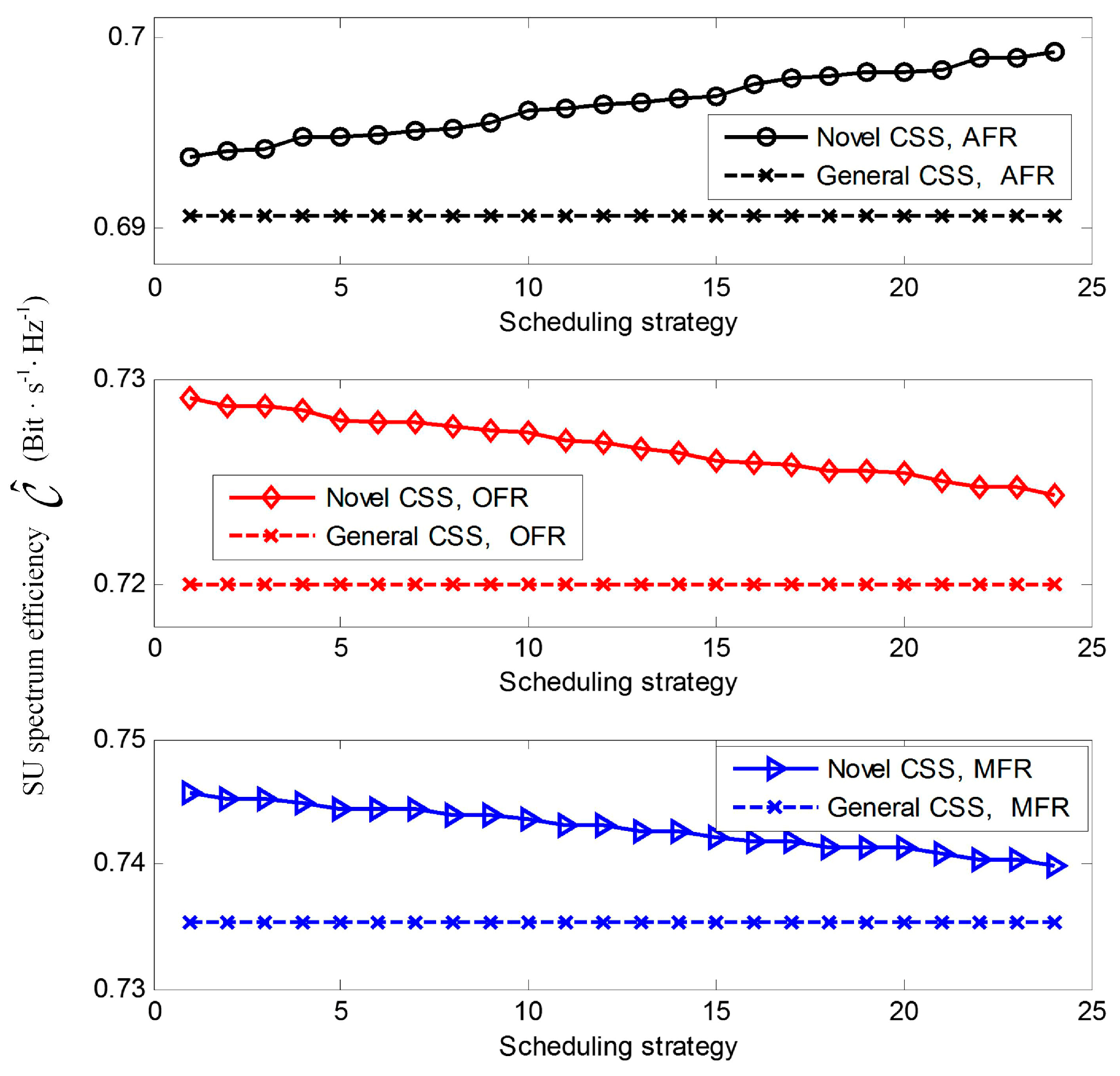
In order to achieve a tradeoff between interference to PU and spectral efficiency, the target cooperative detection probability
is set to be 0.9. In
Figure 7, we plot SU spectral efficiency of the novel CSS with different reporting scheduling strategy, when the optimal sensing time is employed to cases where
is fixed at 1 (OFR),
is fixed at 2 (MFR), and
is fixed at 4 (AFR). The SNR
at the
i-th SU is set to be {−20 dB, −16 dB, −12 dB, −8 dB}. The first scheduling strategy is the descending sort of received
, while the last is the ascending sort of
among the total 24 cases of scheduling strategy. From
Figure 7, it shows the novel CSS scheme outperforms the general CSS in the frequency reuse. In fact, the spectral efficiency of the novel CSS is closely related to scheduling strategy closely, while it has no effect on the general CSS. The optimal scheduling strategy for AFR is reporting the sensing results in the ascending sort of SNR, and reporting the sensing results in the descending sort of SNR can the unoccupied spectrum been fully utilized for OFR and MFR. This is consistent with the aforementioned theoretical proof.
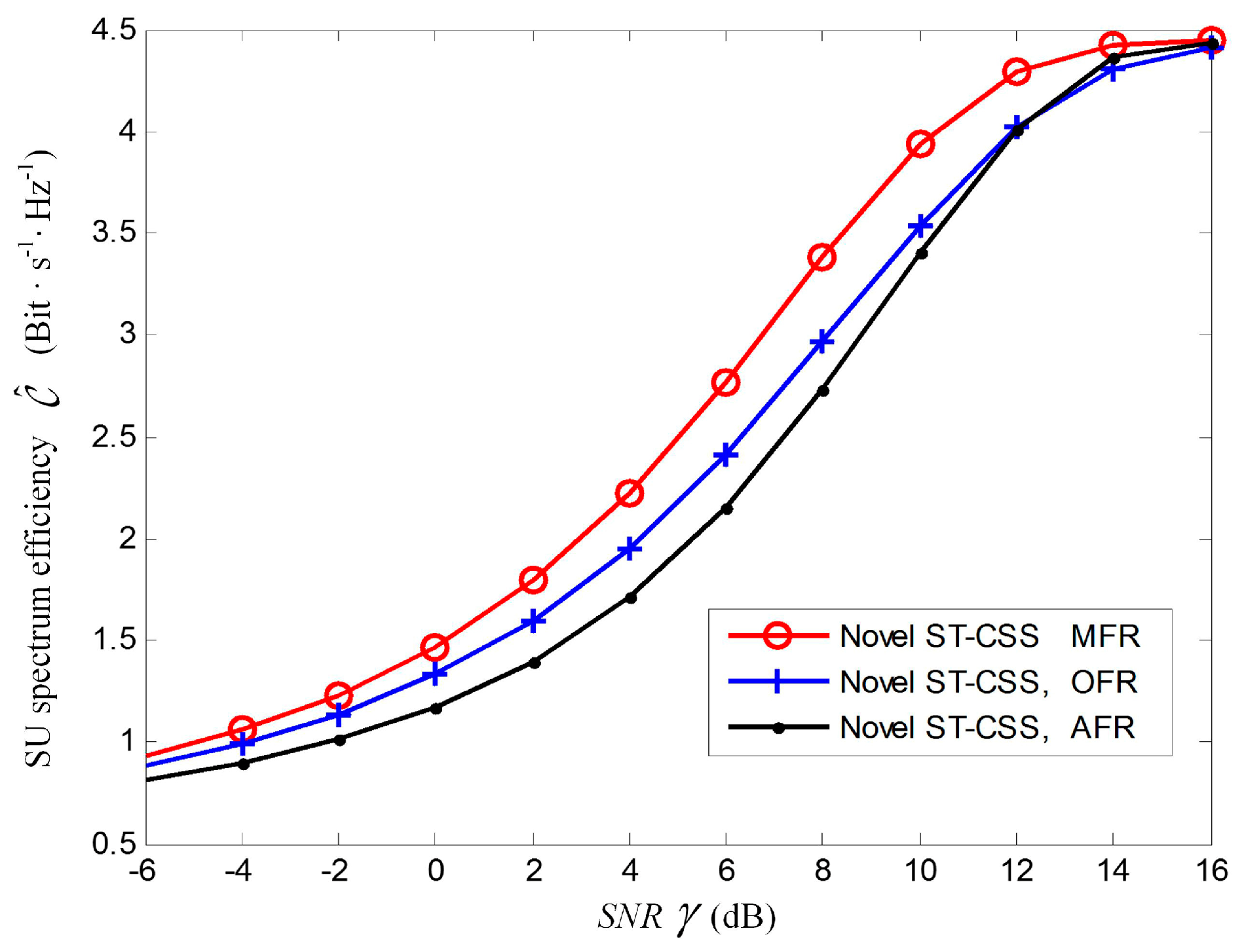
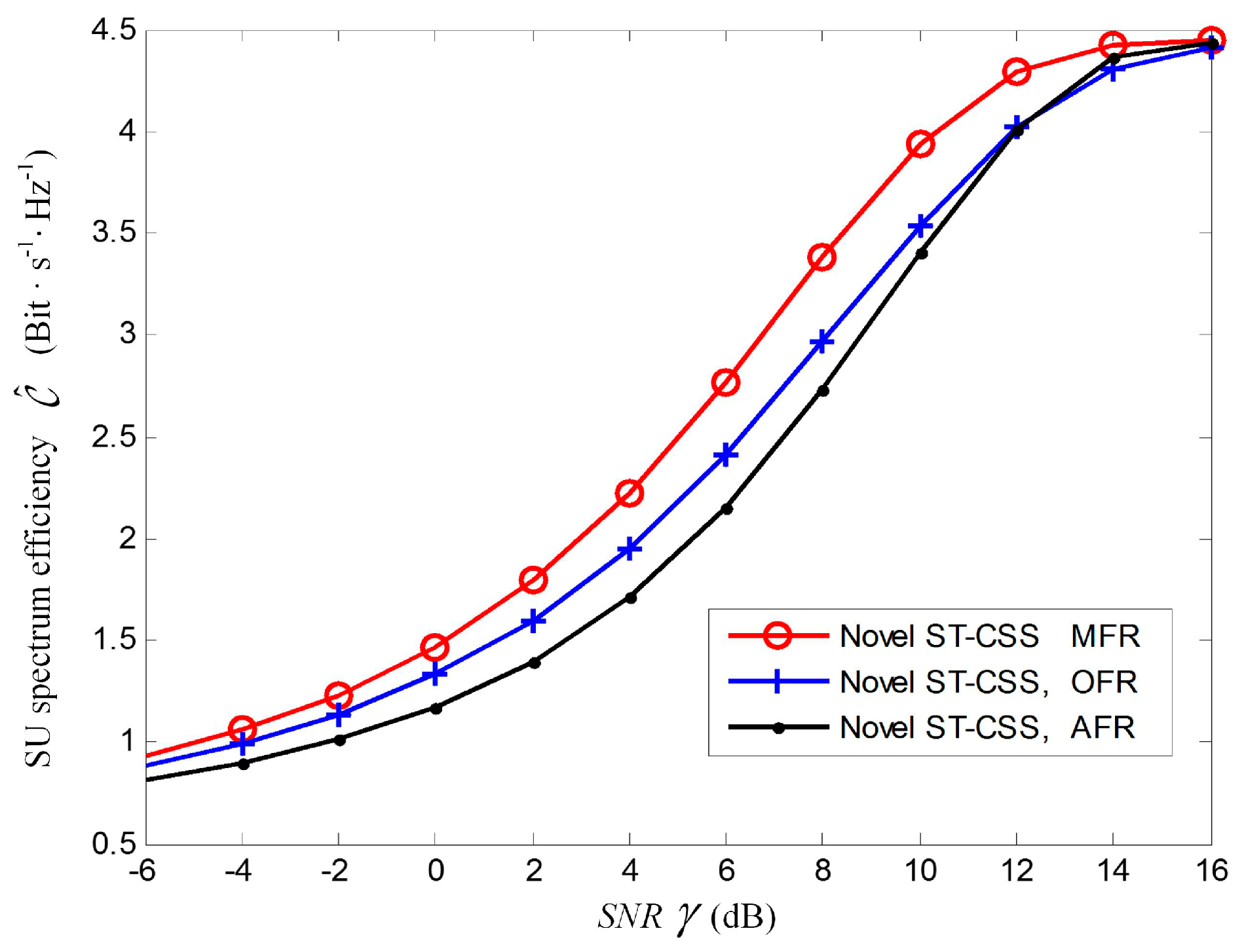
Figure 8 compares SU spectral efficiency
of the proposed ST-CSS scheme versus sensing SNR with CSS based on general frame structure, when the algorithm of optimal sensing settings is employed to decision fusion rules of OFR, MFR, and AFR, respectively. It is assumed that
and
. In
Figure 8, it is obviously seen that the spectral efficiency enhances as SNR increases. Moreover, MFR exhibits the best performance of spectral efficiency than other two combining fusion rules for all SNR values. In lower SNR region of −6 dB~12 dB, OFR is sub-optimal, while AFR becomes sub-optimal when the value of SNR in higher region ranged from 10 dB~16 dB. In the SNR region of more than 16 dB, there is little difference in respect of SU spectrum usage for those three decision combing schemes. It is further concluded that MFR is the optimal rule which aims at maximizing the spectral efficiency with sufficient protection to PU.
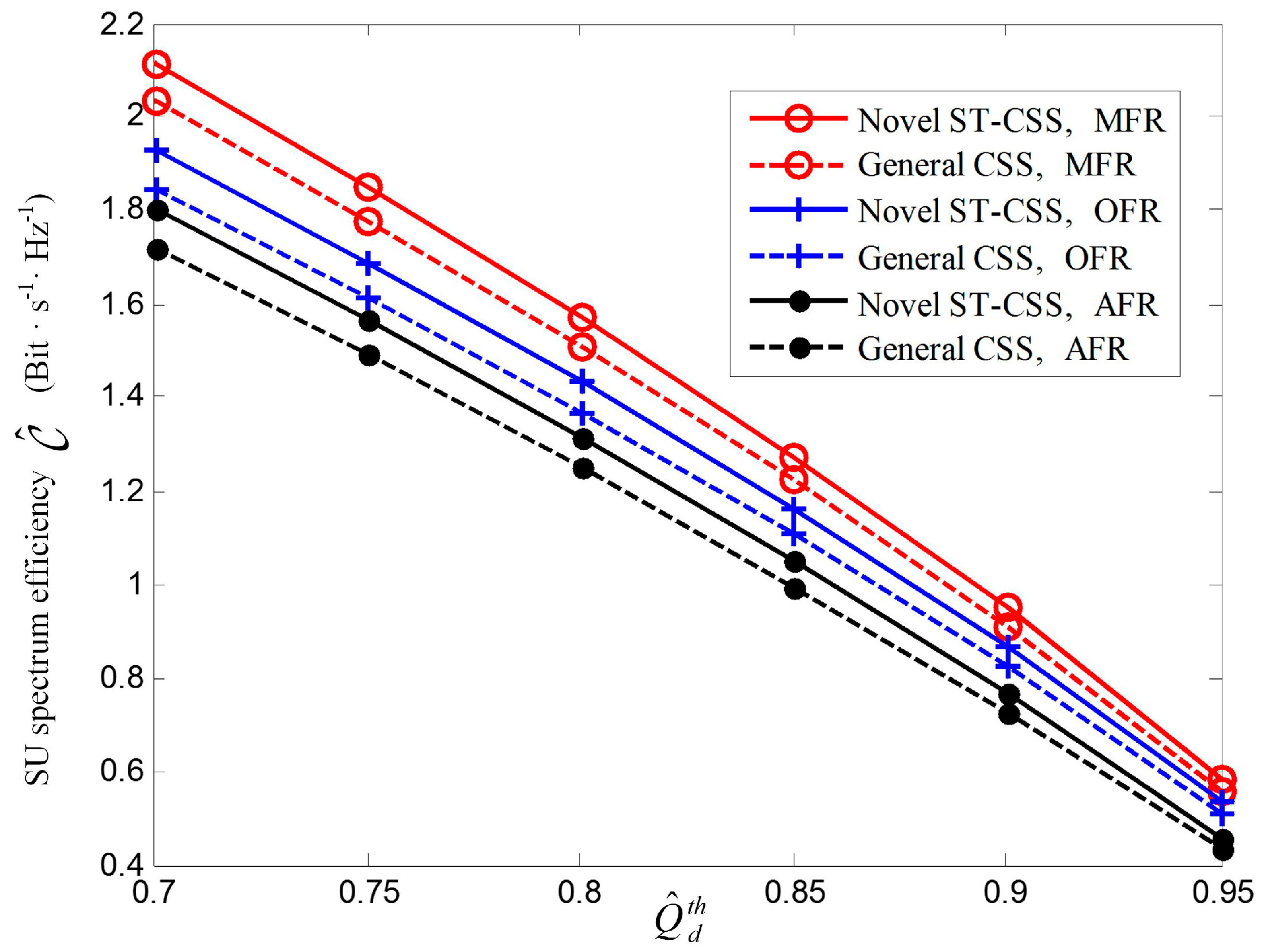
Figure 9 presents SU spectral efficiency versus the targeted cooperative detection probability
for novel ST-CSS and general CSS with counting fusion schemes, in which the average SNR
is −6 dB and the optimal sensing time is employed. As the dashed curves shown in
Figure 9, the novel ST-CSS improves SU spectral efficiency compared with the general CSS. This is because in the framework of the novel ST-CSS scheme, individual SU reporting time can be used for other SU sensing. In this way, each SU gets a longer sensing duration without additional time overhead and the probability of false alarm can be reduced, which results in higher SU spectral efficiency. Additionally, aggregating the sensing results at different time mini-slots is expected to actualize a time diversity gain in spectrum utilization, which contributes to SU spectral efficiency. It is also can be seen from
Figure 9 that SU spectral efficiency increases with the decreasing protection to PU. A relaxing constrained on
can identify more spectrum opportunities, especially when
becomes larger. For example, the SU spectral efficiency for novel ST-CSS with MFR improves approximately 14% when
decreases from 0.75 to 0.5. However, it enhances 63% when
decreases from 0.95 to 0.9. Therefore, the novel ST-CSS with MFR achieves best spectrum reuse with the same protection constraint.
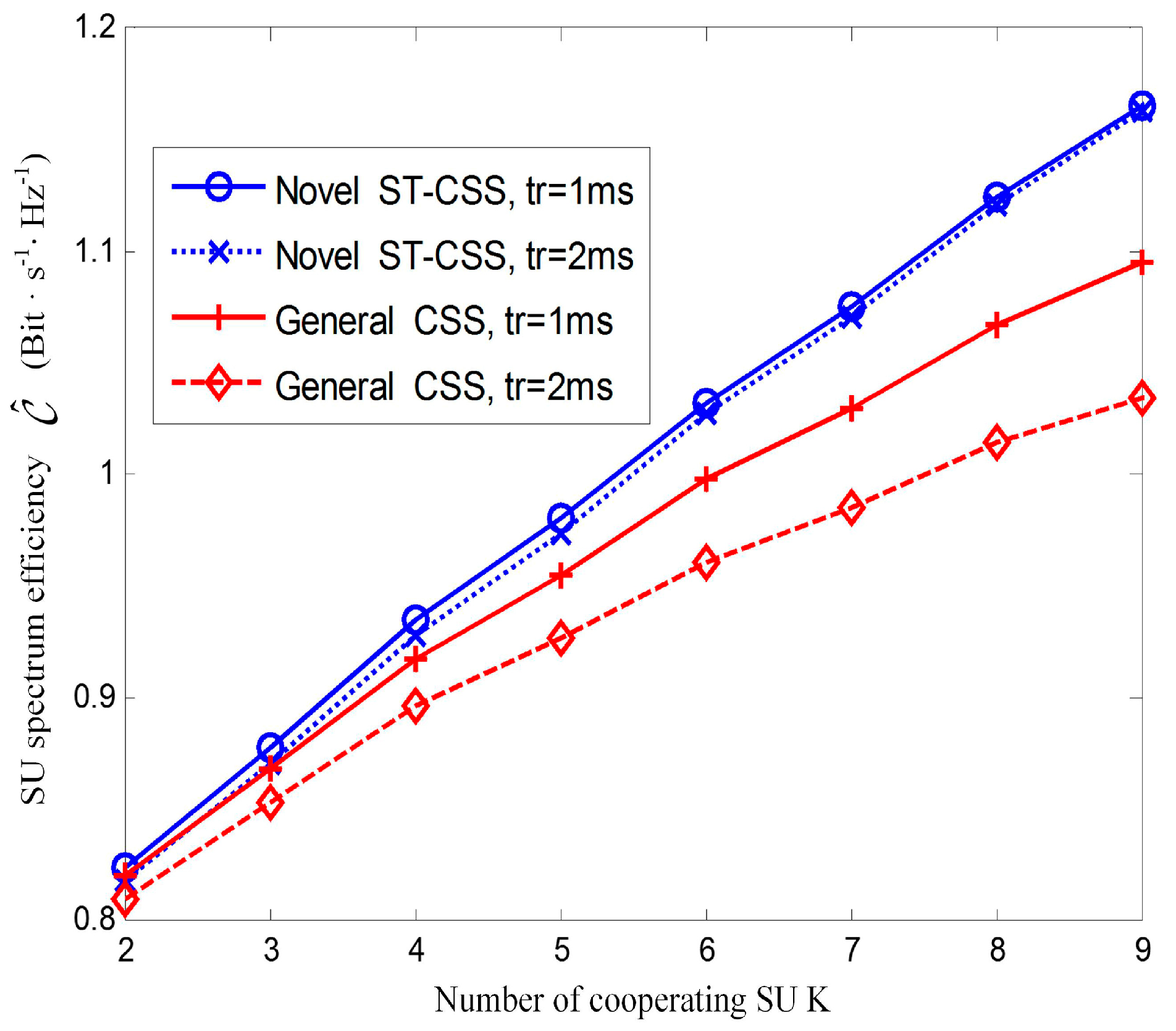
Figure 10 shows SU spectral efficiency versus the number of cooperating SU for the proposed ST-CSS scheme and the general CSS scheme under different values of reporting time. The optimal compressed sensing time and the optimal fusion rule are adopted in this simulation. The spectral efficiency relies on both reporting time
and number of secondary user
. For
, the spectral efficiency of the novel ST-CSS scheme and the general CSS scheme are approximately 1.180 and 1.088 when
tr = 1 ms, and approximately 1.178 and 1.032 when
tr = 2 ms. In the case of
, the spectral efficiency of the two schemes are approximately 0.940 and 0.915 when
tr = 1 ms, and approximately 0.934 and 0.896 when
tr = 2 ms, respectively. Thus, the novel ST-CSS scheme can achieve a significant improvement on spectral efficiency than that of the general CSS scheme. Additionally, it is clear that more time spending for reporting sensing results to FC predicts lower spectral efficiency, especially for the general CSS. This is because in the conventional CSS structure, there is less time for transmission when allocates more time for reporting for the fixed frame length. However, in the framework of the novel ST-CSS scheme, the sensing performance can be further enhanced with extended equivalent sensing duration, which can compensate the loss of average throughput resulted from the less transmission time. It is further summarized that the proposed ST-CSS scheme is less sensitive to reporting time and significantly improves SU spectral efficiency.
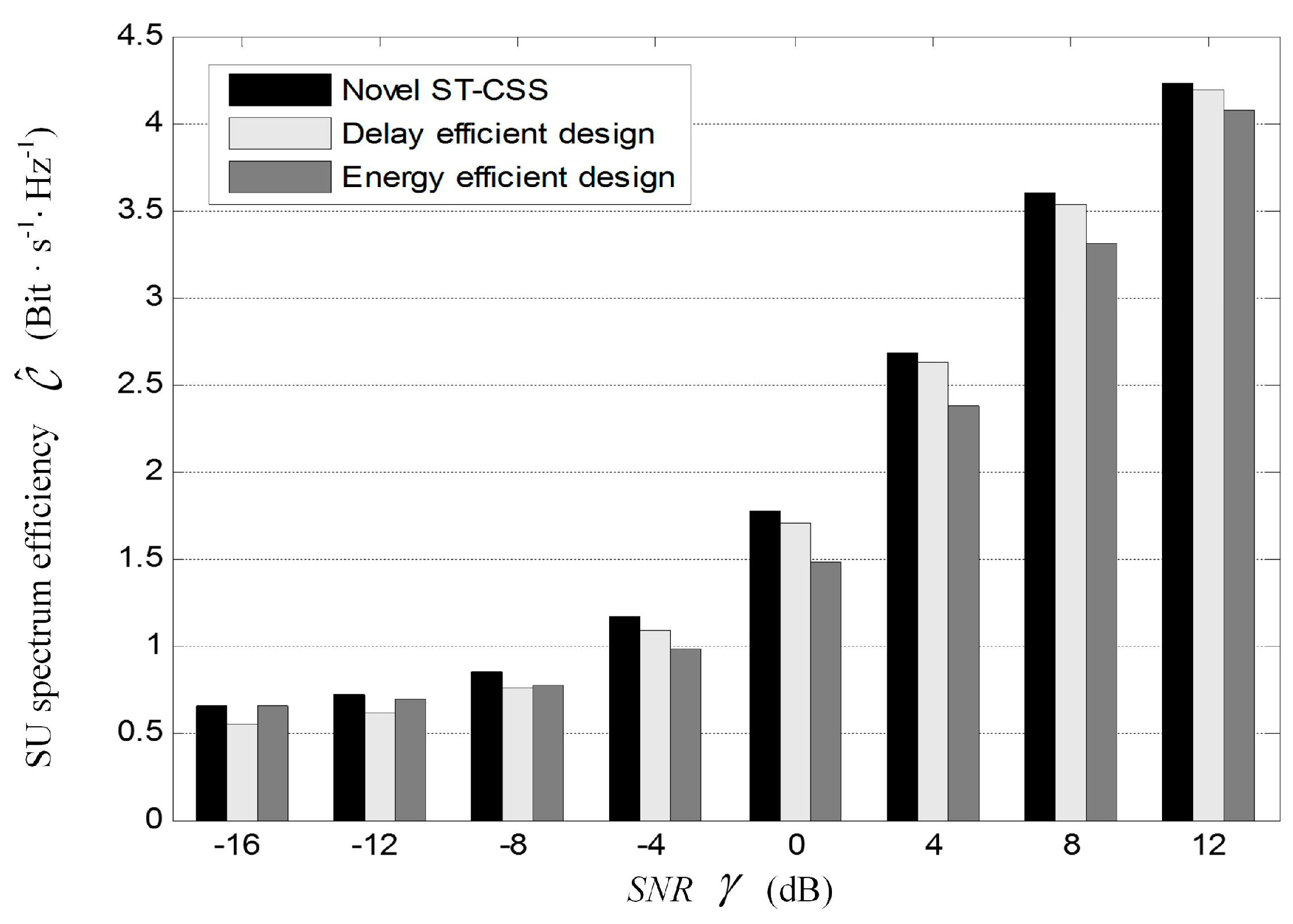
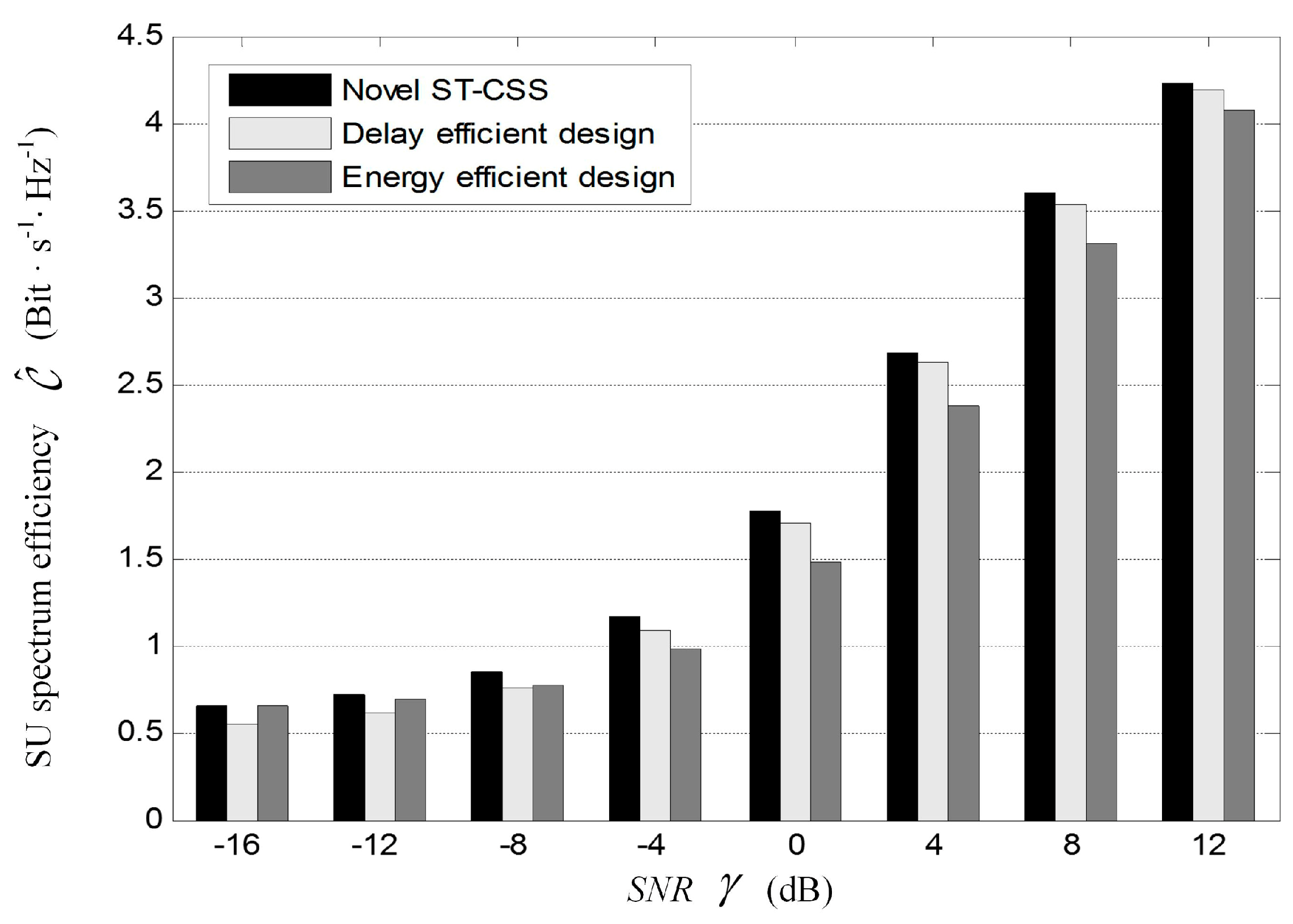
Figure 11 contrasts spectrum utilization efficiency of the proposed ST-CSS with the schemes of energy efficient design in [
34] and transmission delay efficient design in [
35], which satisfies the interference constraint on PU (i.e.,
). As is depicted in
Figure 11, our proposed ST-CSS scheme aiming at maximizing spectral efficiency in Equation (58) provides the highest spectral efficiency, in all values of SNR, while energy efficient design is sub-optimal in lower SNR and delay efficient design becomes sub-optimal in higher SNR. Numerically, the proposed solution improves 1% to 21% and 1% to 19% more spectral efficiency than delay efficient design and energy efficient design in all values of SNR, and the degrees of improvement of the spectral efficiency is determined by SNR. This is because the goal of transmission delay efficient design is to design the sensing parameters that can minimize the SU transmission delay in the scenario of delay sensitive applications, while the goal of energy efficient design is to design the sensing parameters that can maximize the energy efficiency in energy limited CR network with the same fixed frame length. Furthermore, the complexity of those three schemes are equivalent, because they differ only from optimization target in corresponding scenario with the similar main steps as Algorithm 1 presents. Specially, our proposed scheme is more suitable to overcome the problem of spectrum scarcity.
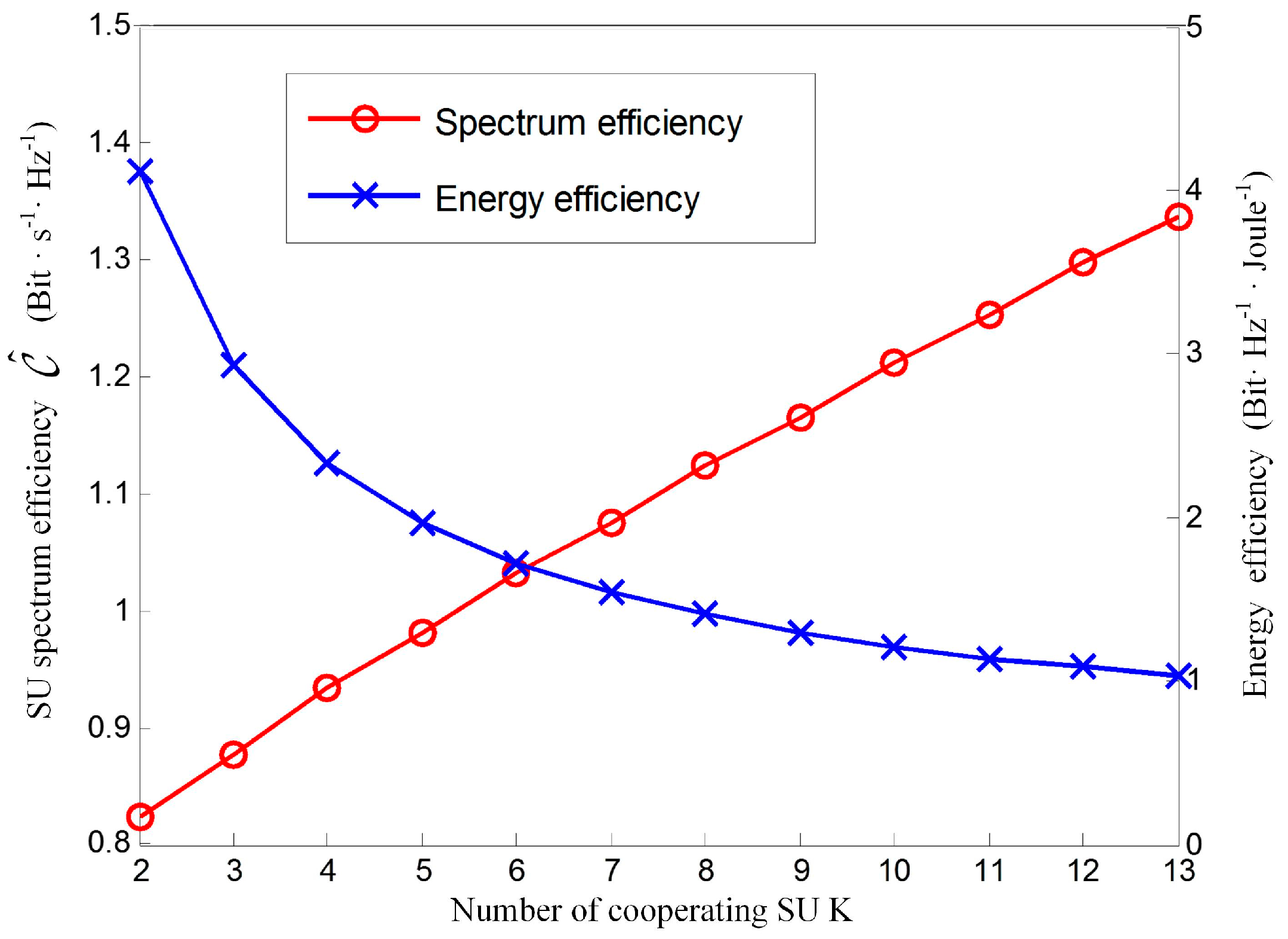
In order to evaluate the energy consumption of the proposed ST-CSS method in scenario of energy limited CR system,
Figure 12 illustrates the SU energy efficiency and spectral efficiency of the novel ST-CSS scheme versus the number of cooperating SU synchronously. In this simulation, the energy efficient design in [
34] is utilized to obtain the energy efficiency. Meanwhile, the optimal sensing time and the optimal combining rule are employed to obtain the SU spectral efficiency. It can be observed that the SU spectral efficiency enhances when
increases as a result of the improved cooperative sensing performance. However, energy efficiency will decrease as
increases, because more energy will be consumed to implement cooperative sensing and report sensing results. Though the more cooperative secondary sensor nodes in novel ST-CSS scheme can afford better spectral efficiency, it would shorten the CR networks lifetime due to increasing energy consumption.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}