
Design Methodology for Magnetic Field-Based Soft Tri-Axis Tactile Sensors

 , and
, and 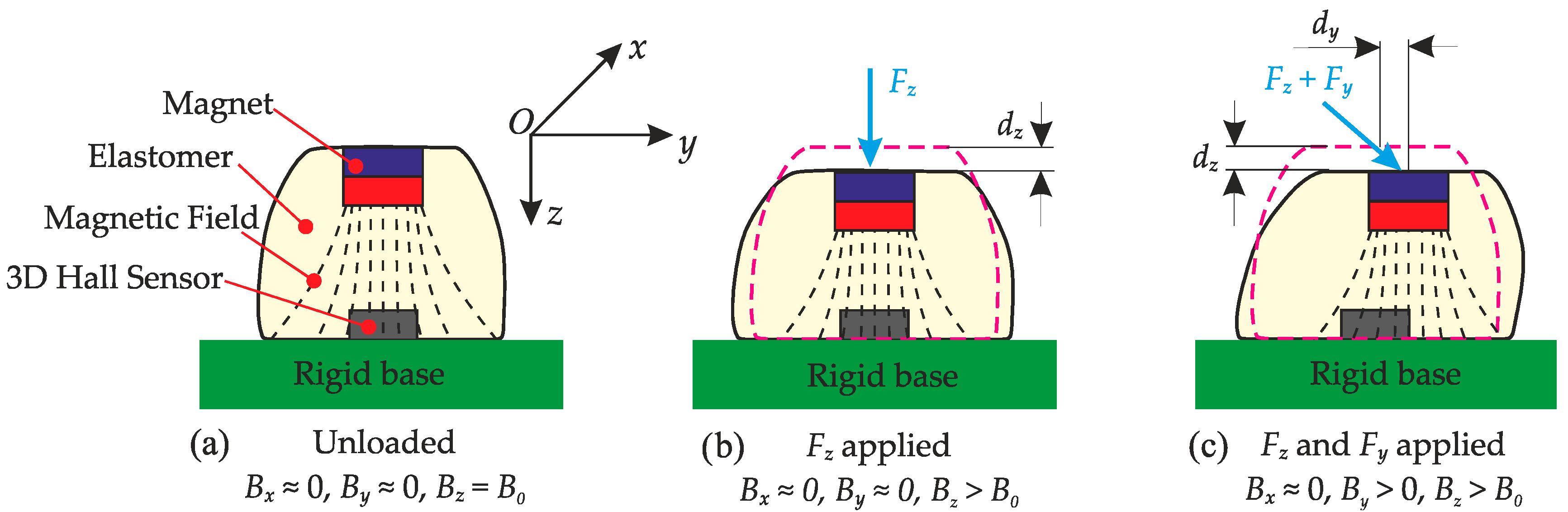{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
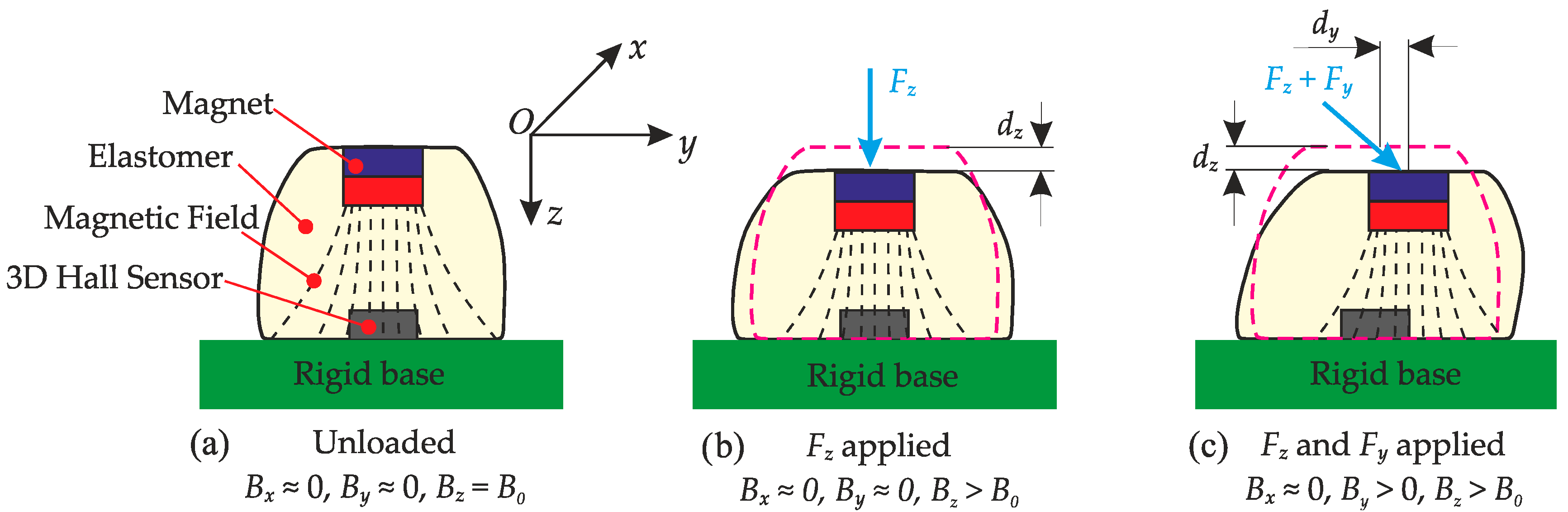
2.1. Sensor Concept
2.2. Magnet-Based Position Sensing
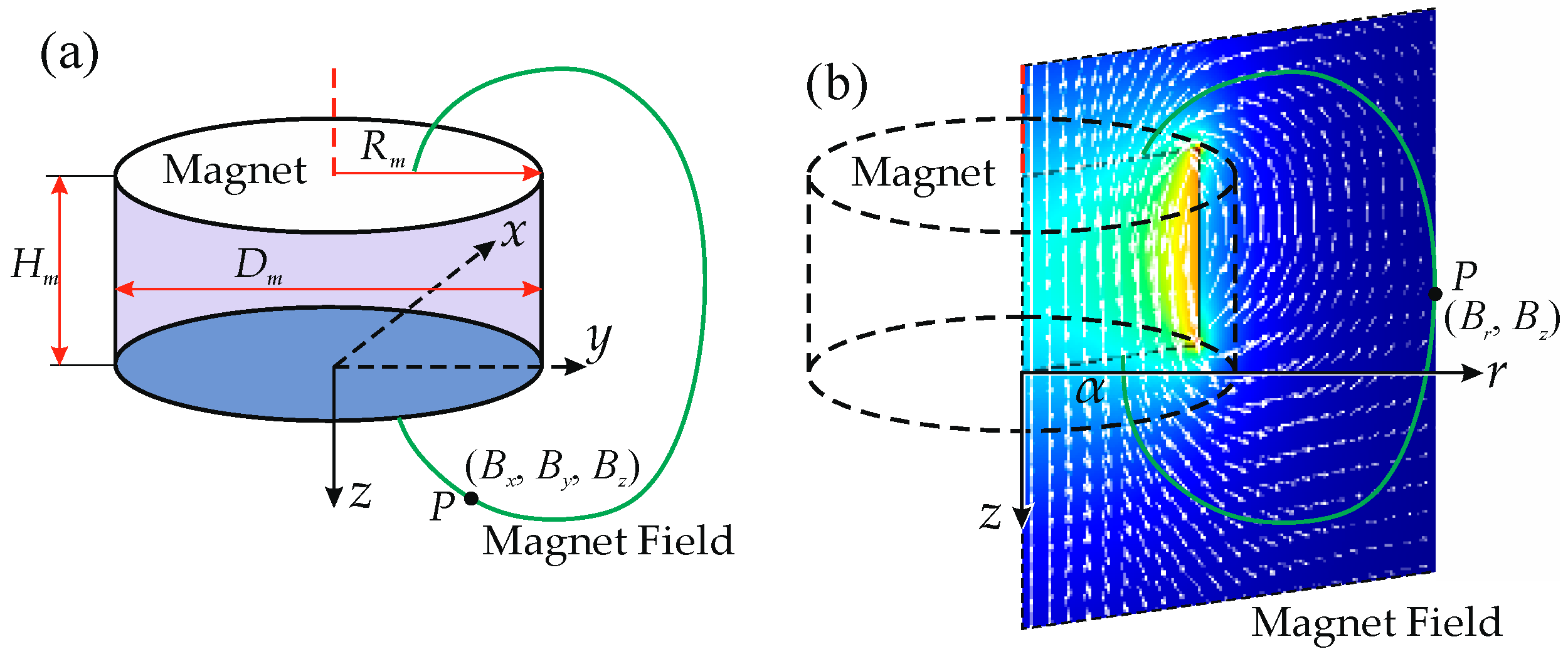
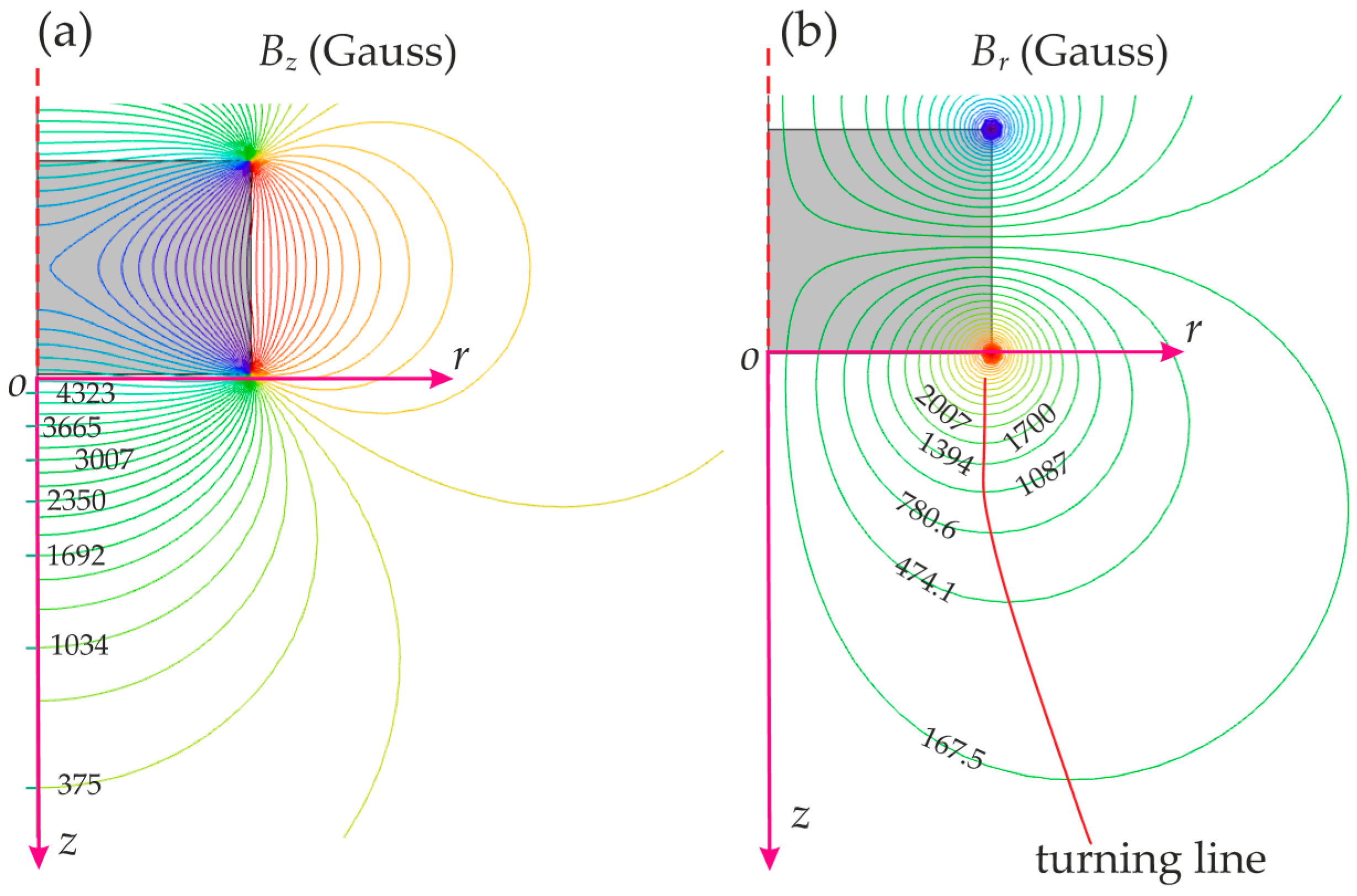
2.2.1. Magnetic Field Characterisation
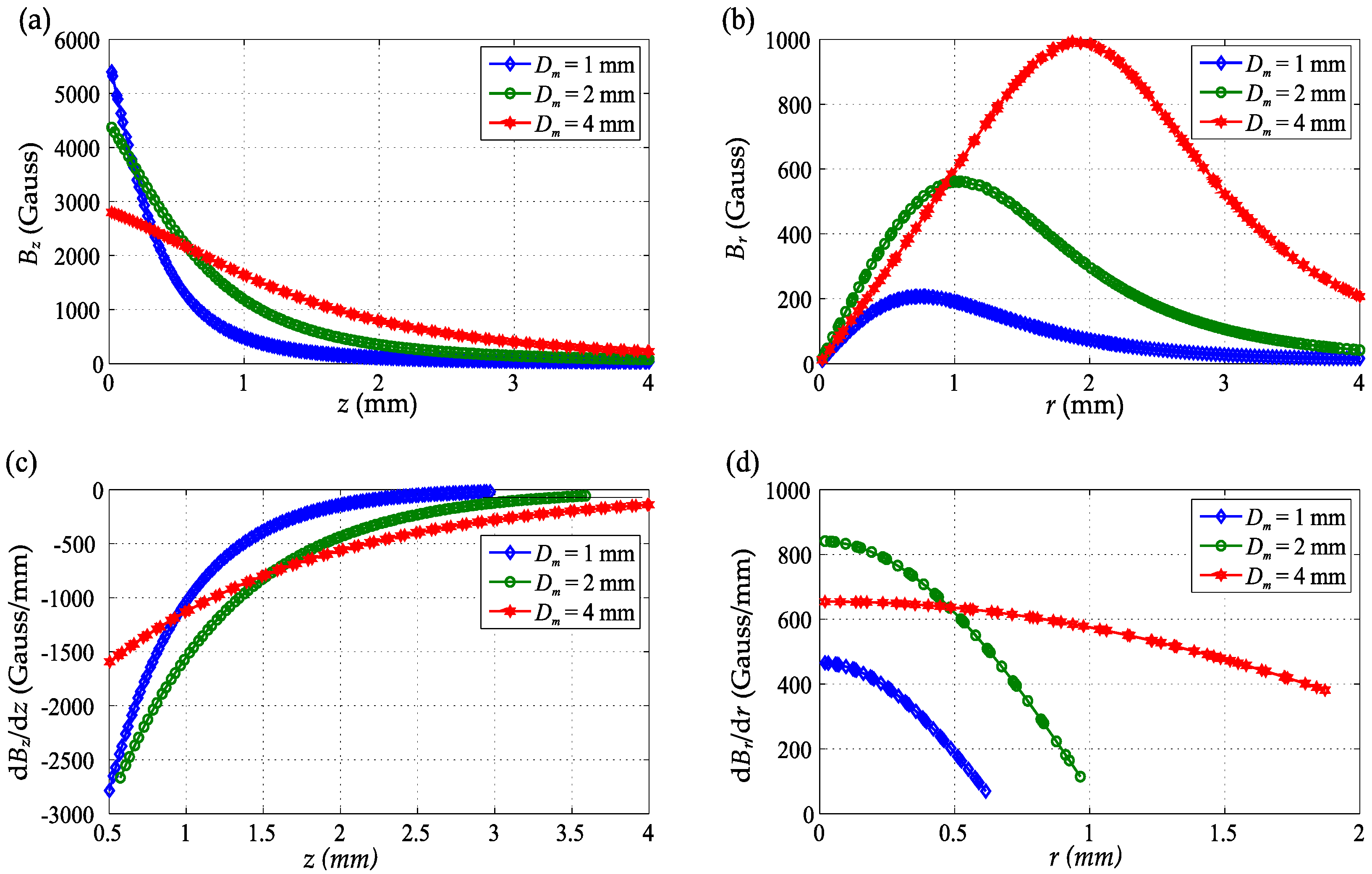
2.2.2. Dimension Effect
2.2.3. Magnetic Sensor
2.3. Elastomer Design
2.4. Analysis of Sensor Performance
2.5. Sensor Calibration
2.6. Design Guidelines
- (1)
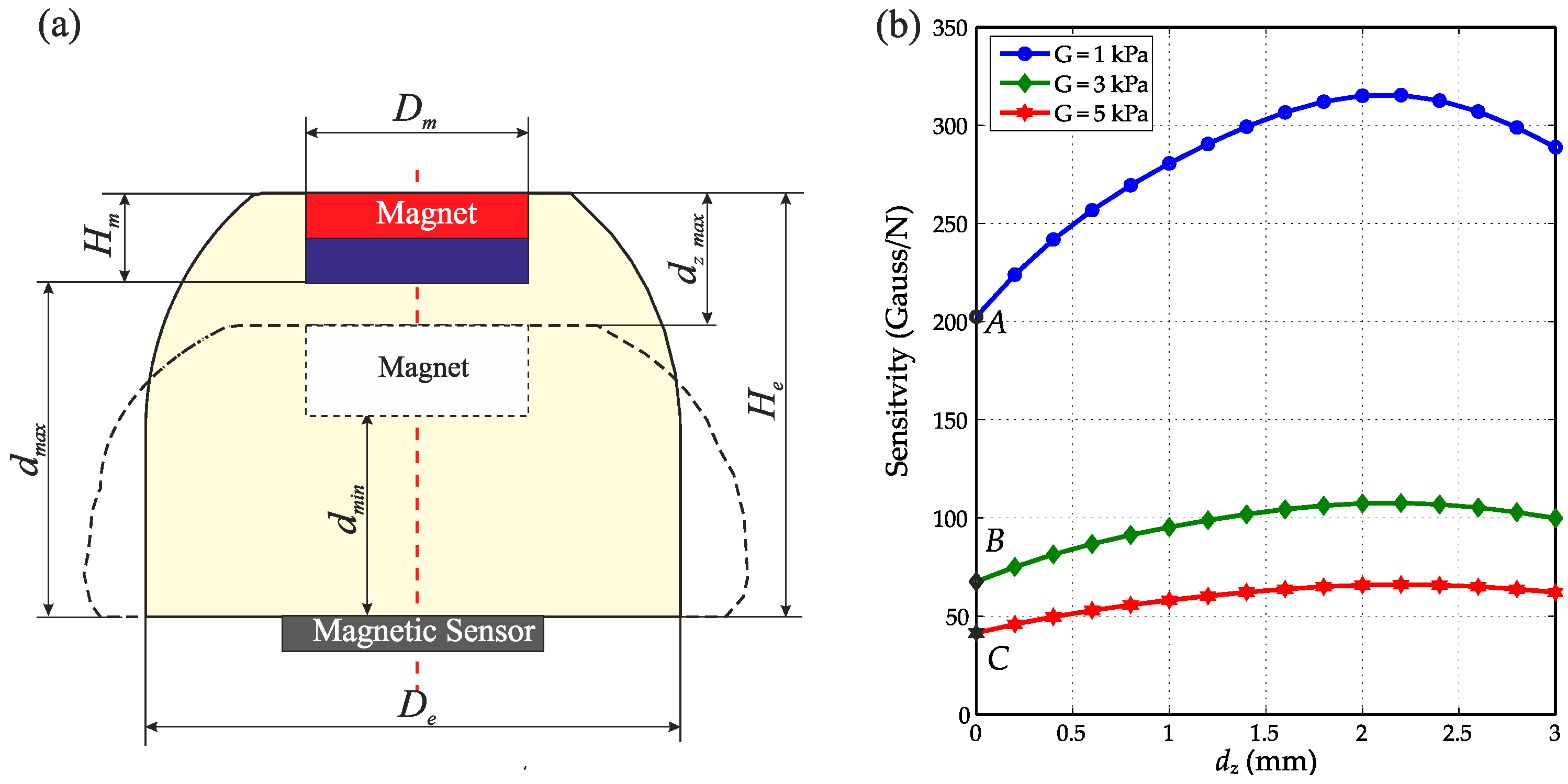
- Magnetic source: choose the magnet size, such that the radius of the magnet is larger than the maximum tangential displacement of the magnet. The height of the magnet should be as small as possible to reduce the weight, but should be large enough to maintain a strong magnetic field in the z axis. A ratio of 0.2~0.5 between the magnet height and diameter is appropriate for most situations.
- (2)
- Sensitivity and range: The maximum distance between the magnet and the magnetic sensor dmax should be small enough so that it will meet the minimum magnetic field gradient (SB)min requirement. Generally, a maximum distance dmax between 1- and 2-times of the magnet diameter (Dm) is appropriate. Based on the saturation magnetic field of the magnetic sensor, the minimum distance should be selected to avoid saturating the sensor and, also, should fit the maximum deformation requirement.
- (3)
- Elastomer geometry: Once dmax and the magnet height Hm are defined, the height of the elastomer He is determined. The diameter of the elastomer alters both the compressive stiffness and the shear stiffness. The fabrication and application limitations should also be considered when choosing the appropriate diameter.
- (4)
- Material properties: Changing the elastomer material can change the stiffness of the elastomer, resulting in decreasing (or increasing) the sensitivities of both normal and shear force measurement. The stiffness of the elastomer defines the range of force measurement, as well.
3. Design Case Study: The MagOne Tactile Sensor
3.1. Design
- (1)
- Magnetic source: To achieve a wide measurement range (i.e., deformation), an axis-magnetized cylindrical magnet (N35 neodymium, First4Magnets) with a diameter of 5 mm and a height of 2 mm was selected for MagOne, which will allow a deformation approximately the diameter of the magnet.
- (2)
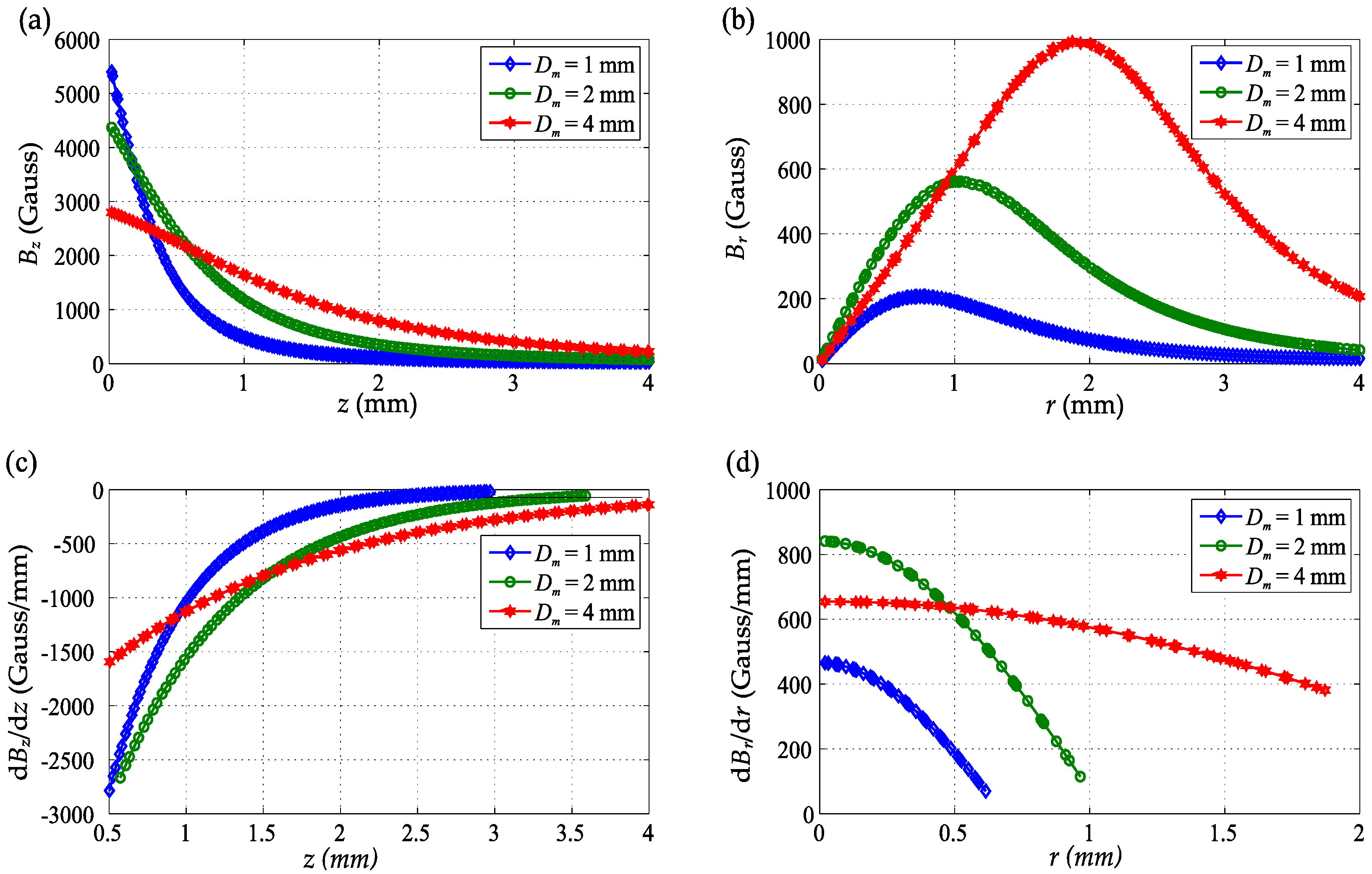
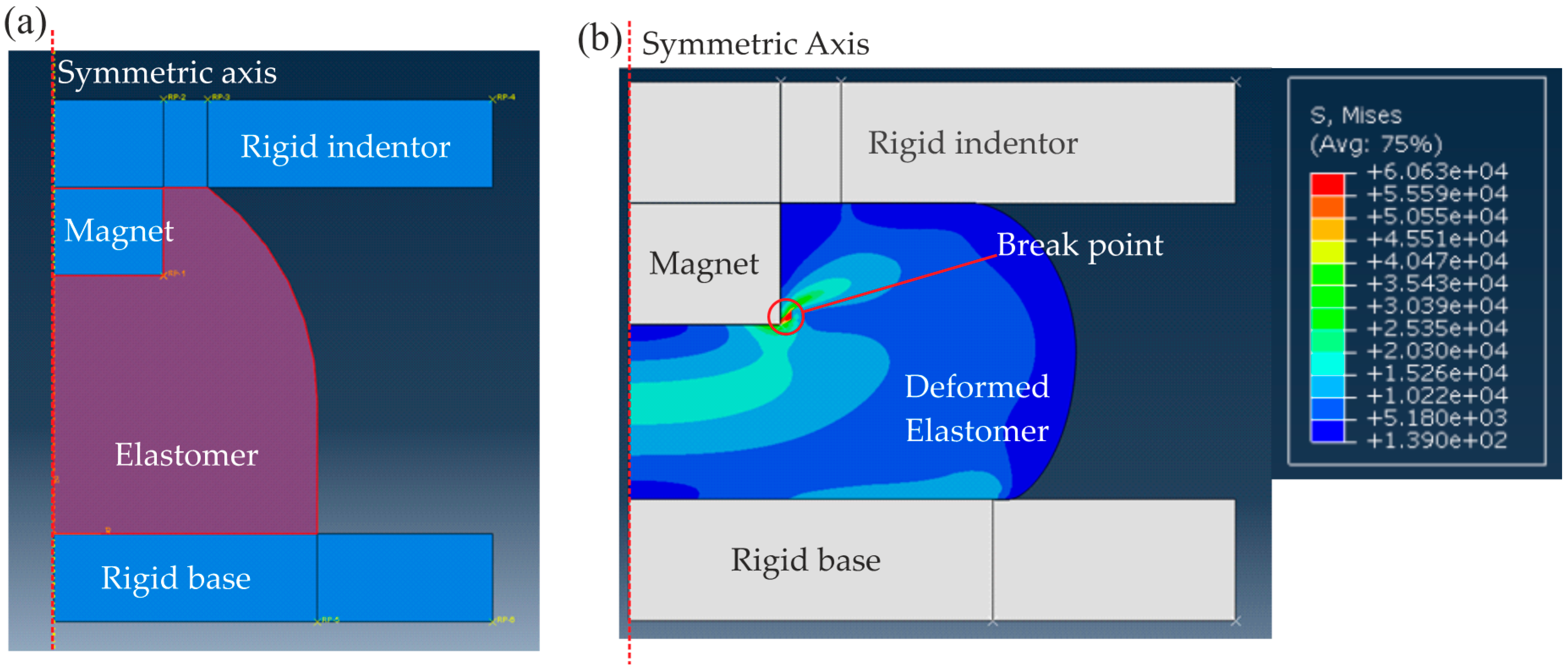
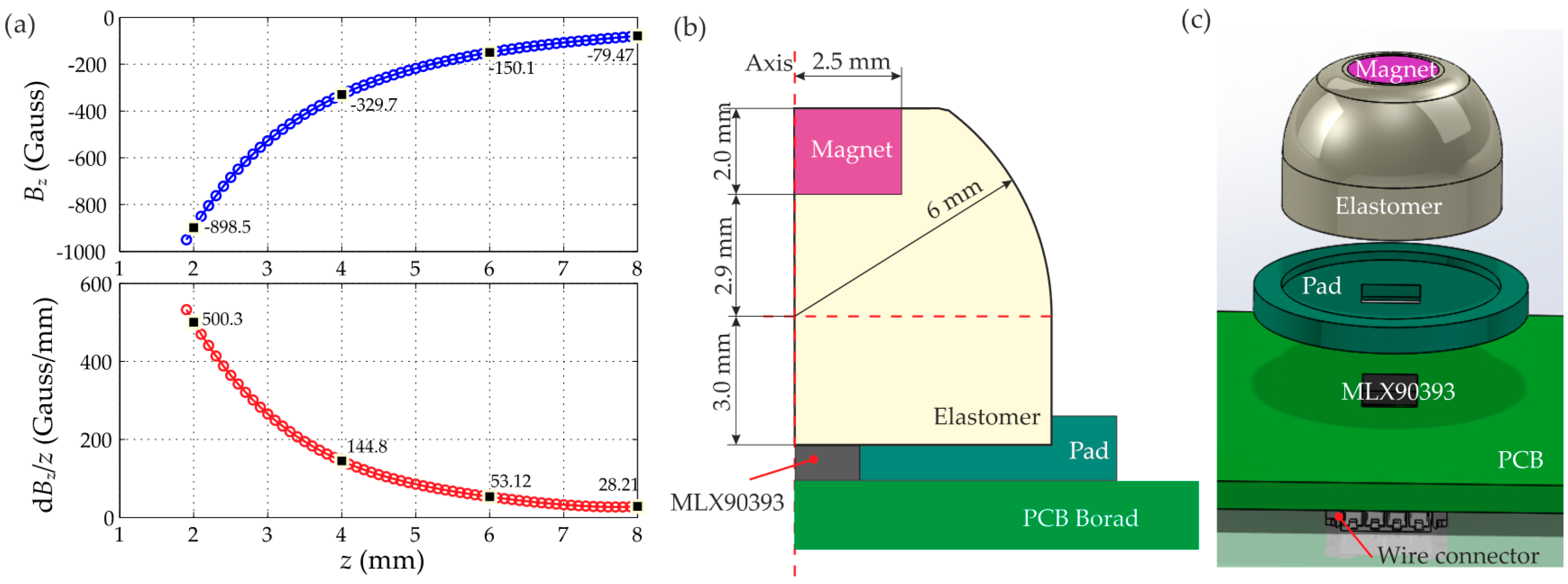
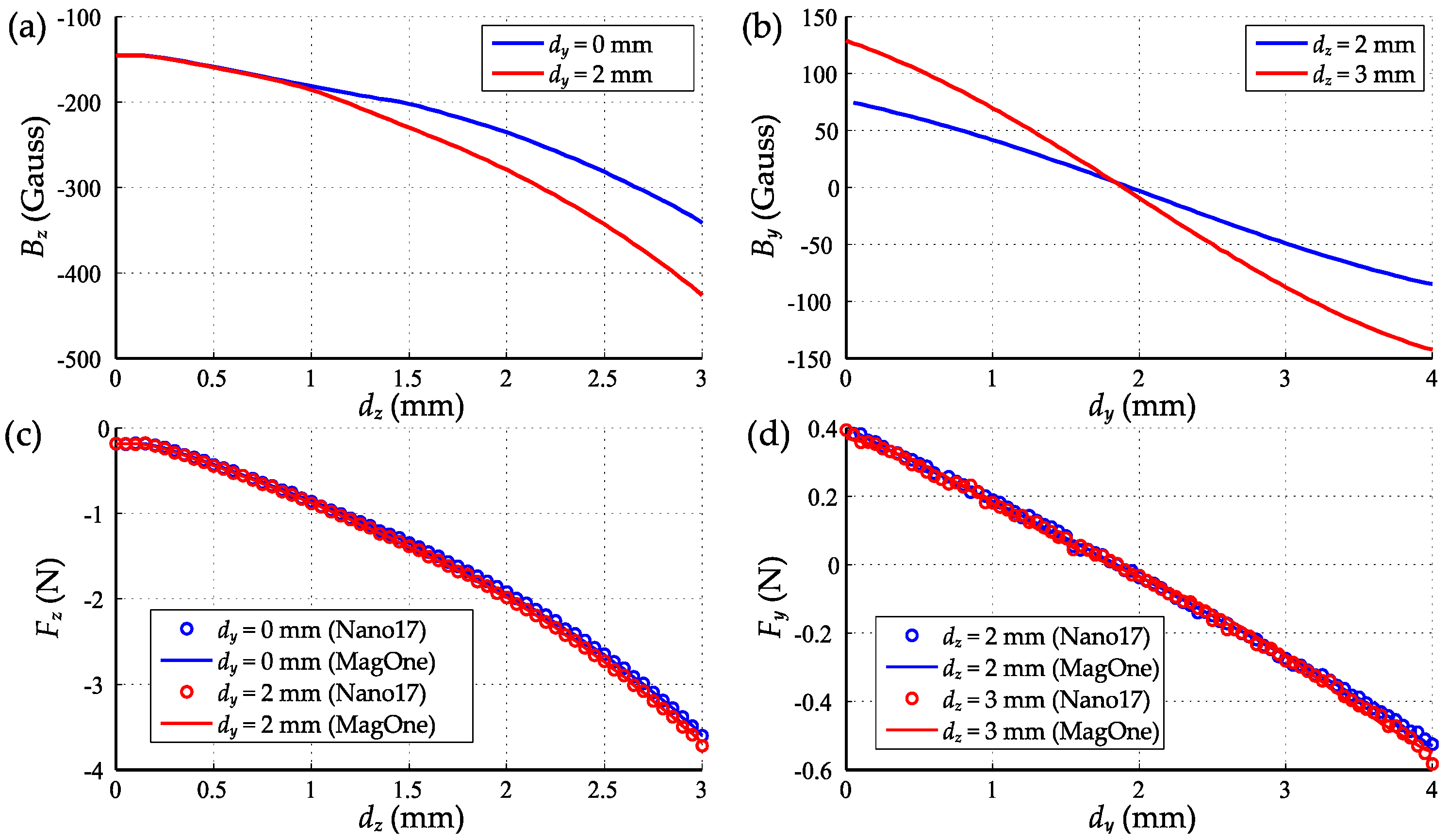
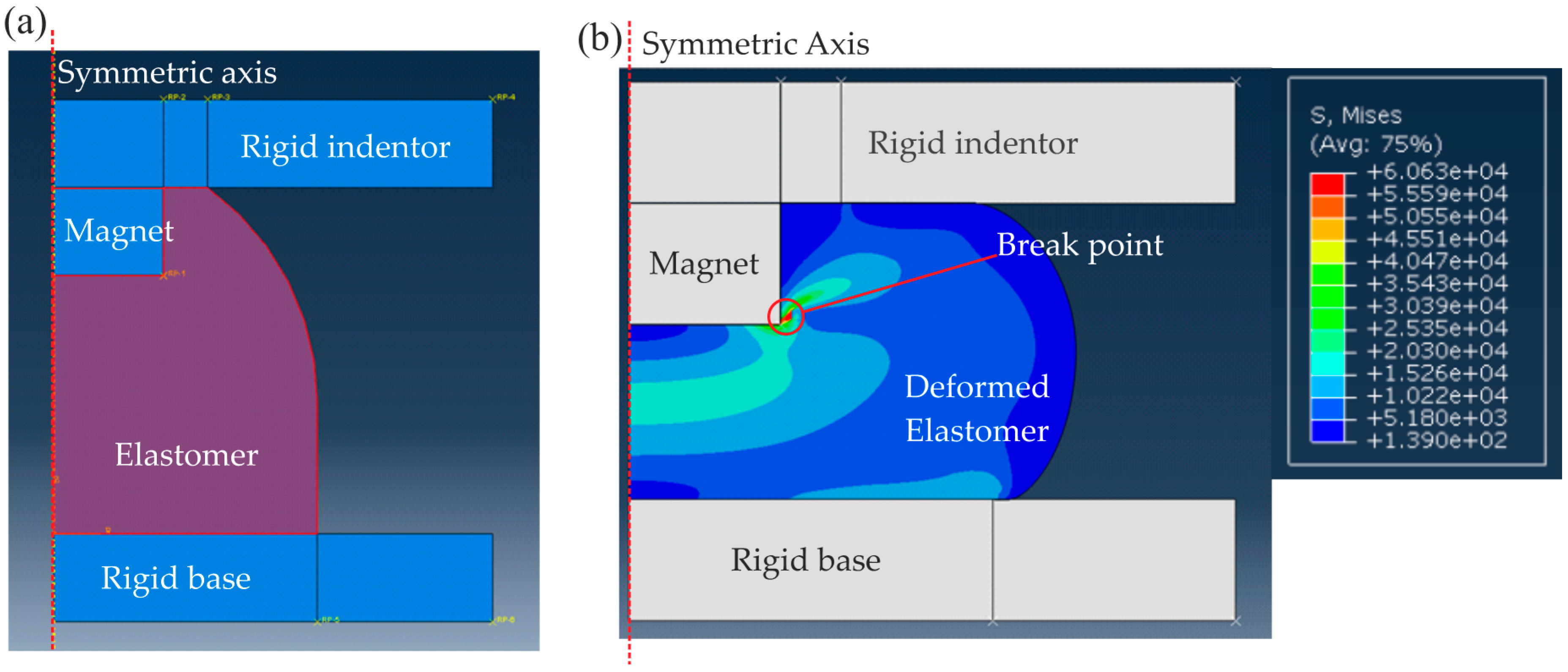
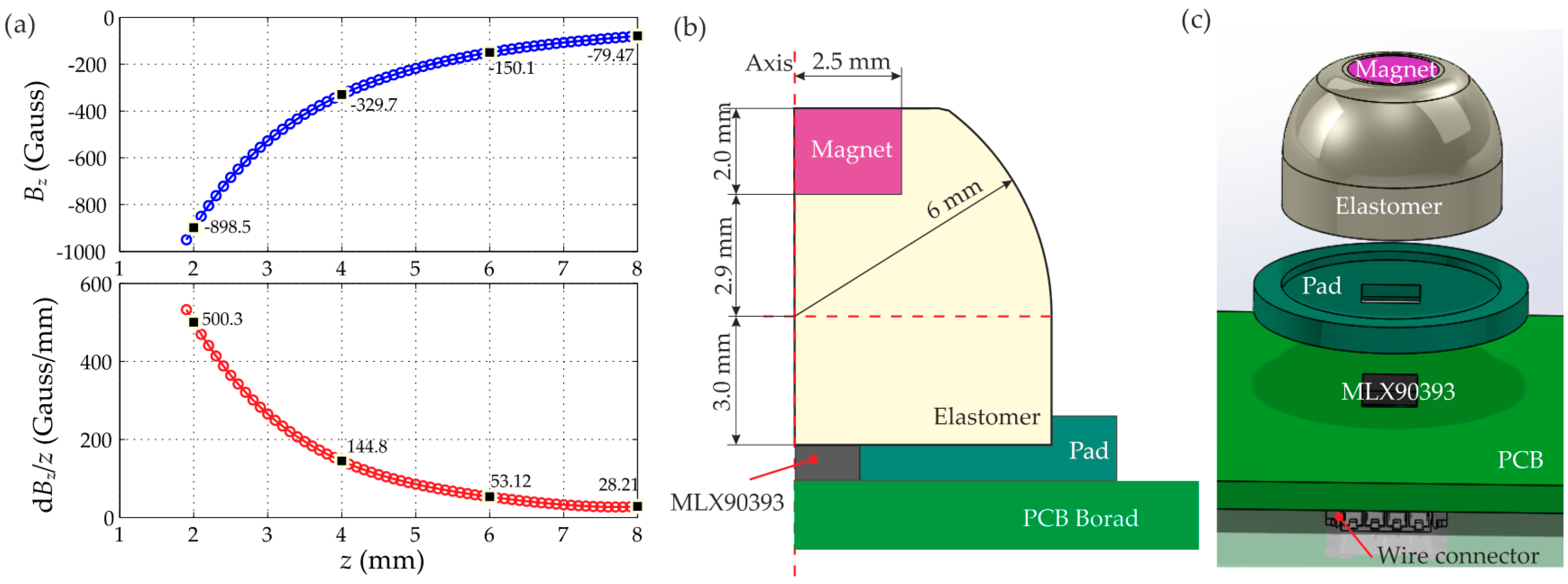
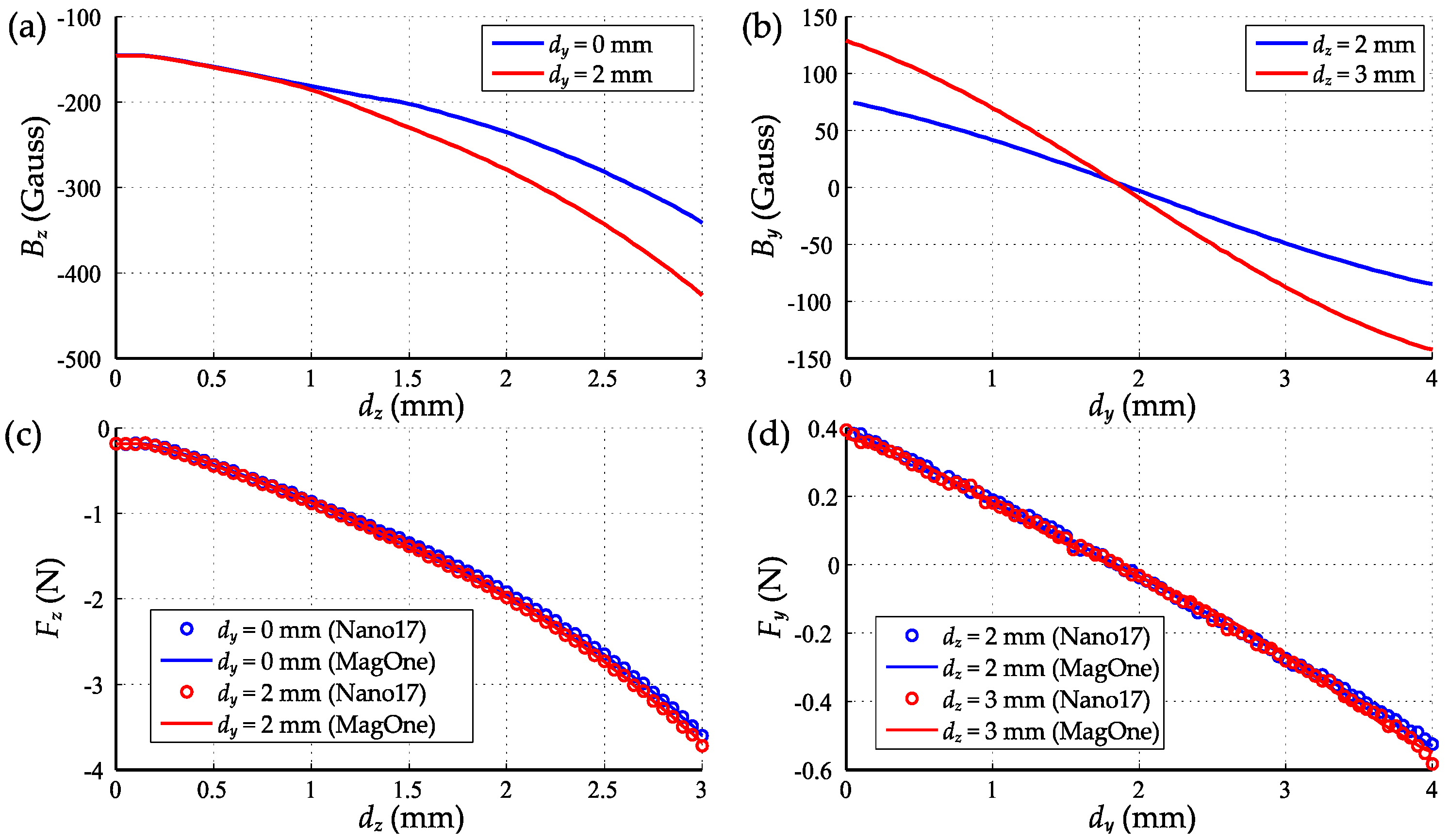
- Sensitivity and range: The magnetic field density and gradient along the z axis for the selected magnet are shown in Figure 8a. Based on this, the maximum distance between the magnet and sensor was selected as 6 mm, where the magnetic field density is 150 Gauss, and the gradient is 53 Gauss/mm. A compact 3D Hall effect sensor, MLX90393 (3 mm × 3 mm × 0.8 mm, QFN-16 package), with digital output (via I2C bus) was selected to measure the three-axis magnetic field. The magnetic sensor has a configurable measuring range up to ±962 Gauss in the z axis, with a 16-bit ADC [27]. The sensor will saturate when the distance is less than 1.9 mm (Bz = 950 Gauss); therefore, the minimum distance dmin can be determined as 2 mm, and the maximum deformation dz_max is 4 mm (Equation (8)), where the magnetic gradient is as high as 500 Gauss/mm. Considering the large stress concentration on the edge of the magnet, the maximum deformation is limited to 3 mm, where the magnetic gradient is 265 Gauss/mm.
- (3)
- Elastomer geometry: As shown in Figure 8b, an elastomer with a cylinder base and hemisphere tip was used as the transfer medium, and the magnet was embedded on the top of the elastomer. Based on the distance determined above, the elastomer has a total height of 7.9 mm, and a diameter of 12 mm was selected here to make sure that the elastomer has a comparable shear stiffness to compressive stiffness and that the sensor probe will not bend over.
- (4)
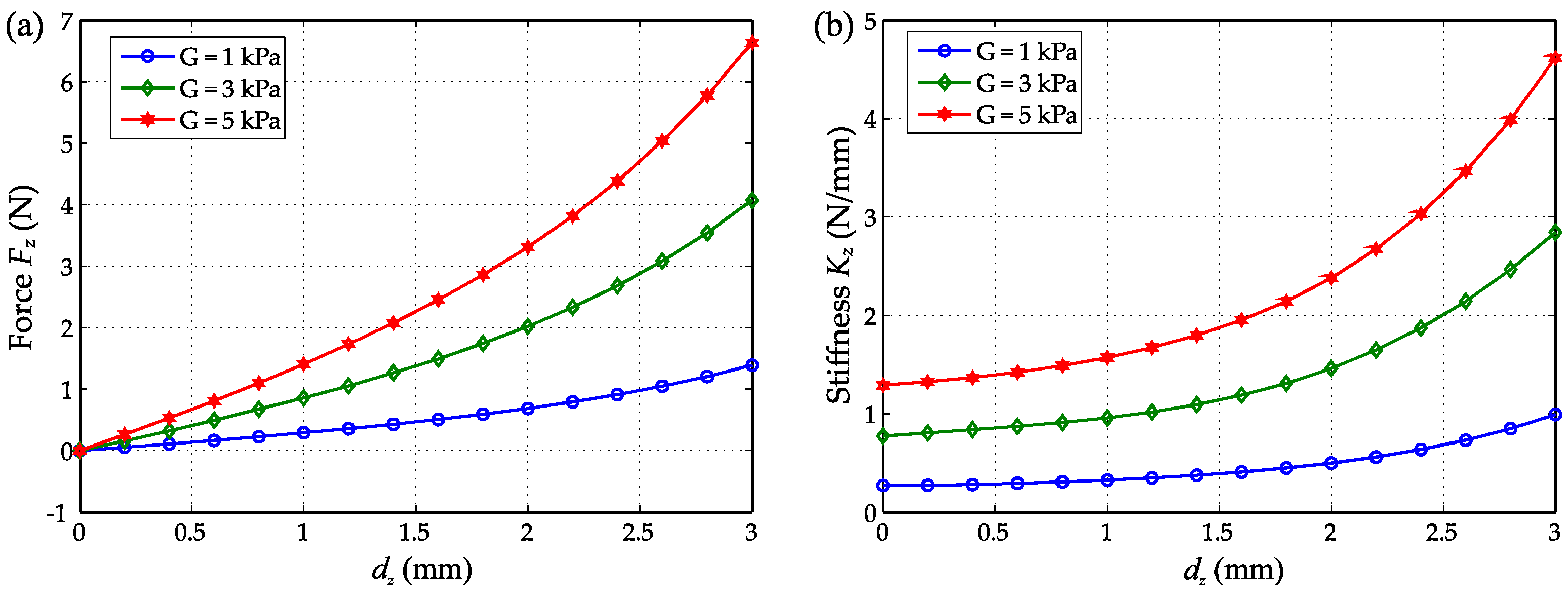
- Material properties: Silicone with a shore hardness of 00-30 was selected for the elastomer, which has a shear modulus of 3.06 kPa. By using the finite element model presented in Figure 5, the stiffness of the sensor can be determined for specific load conditions, then the sensitivity and the resolution of the tactile sensor can be estimated.
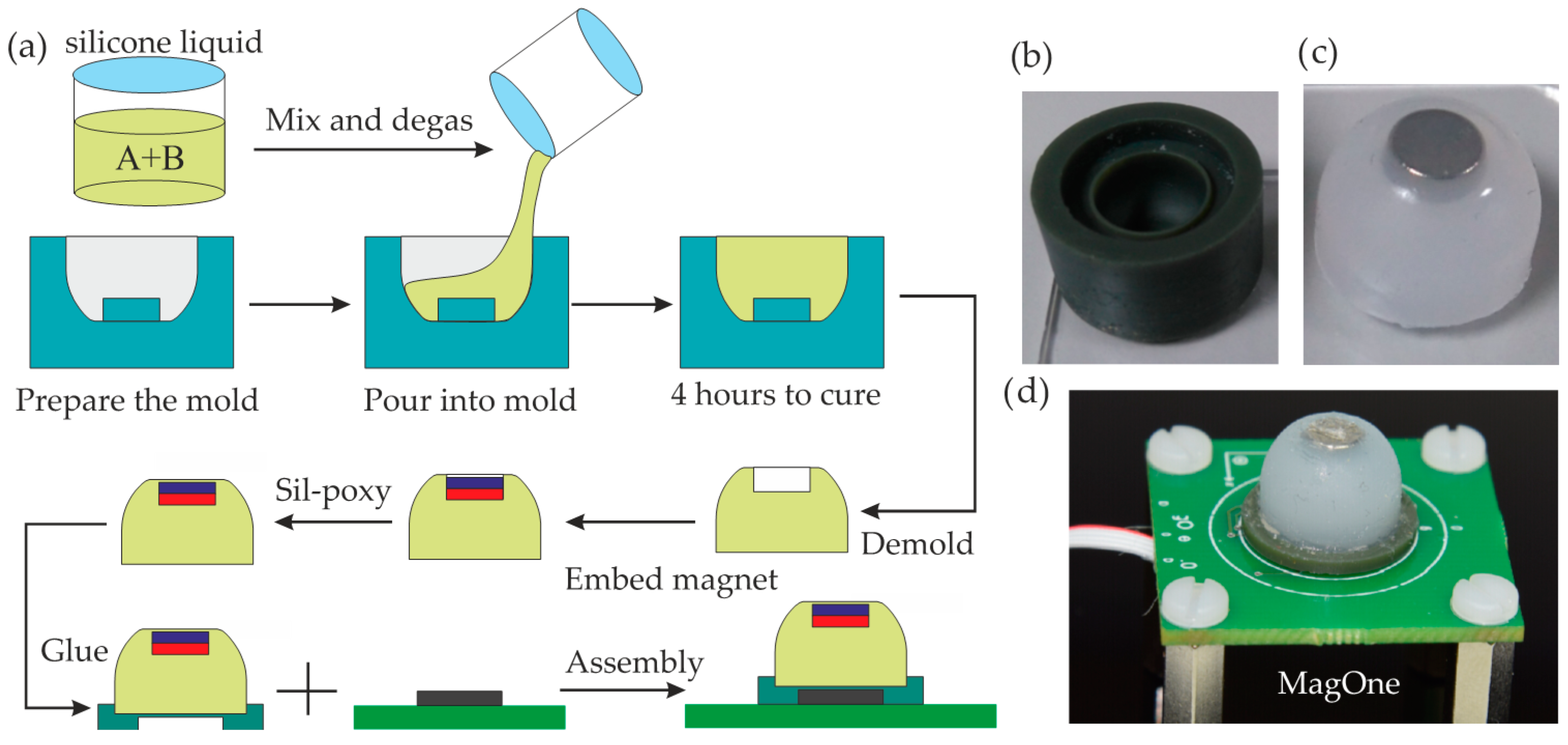
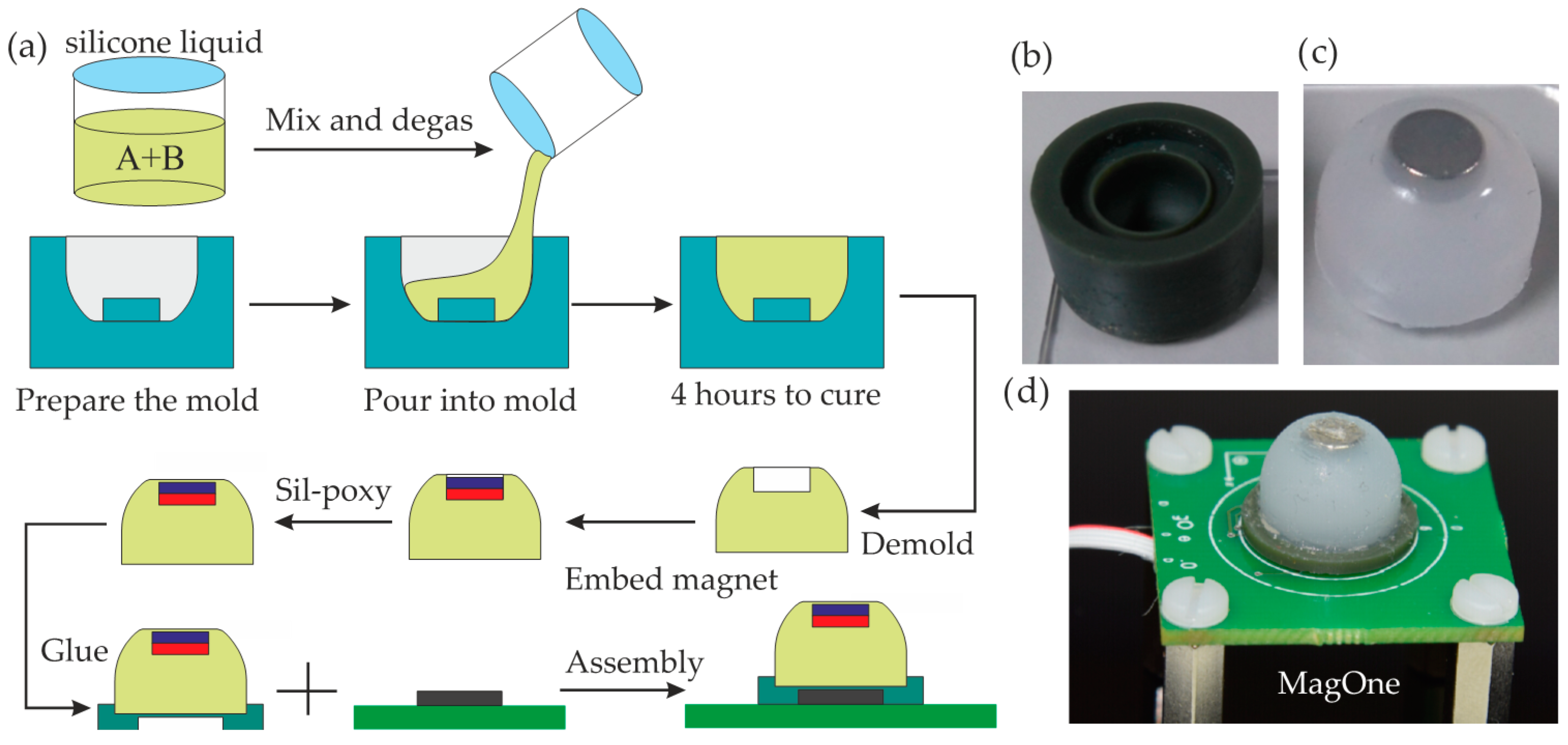
3.2. Fabrication
- (1)
- An inverse mould was designed and then printed using a high-resolution 3D printer (Perfactory, EnvisionTEC, Gladbeck, Germany), shown in Figure 9b. Prior to casting, the mould was cleaned and treated with silicone release agent to prevent mould adhesion.
- (2)
- The silicone (Ecoflex 00-30, Smooth-On Inc., Macungie, PA, USA) was prepared at 1:1 (Part A:Part B) by weight, then degassed through a vacuum pump.
- (3)
- The degassed silicone liquid was poured slowly into the mould and left at room temperature for 4 h until fully cured before removal.
- (4)
- The magnet is embedded into the hole in the silicone body and secured using a small volume of Sil-poxy (silicone adhesives, Smooth-On Inc.) to ensure that the magnet is fully encapsulated and integrated into the silicone elastomer body. The fabricated elastomer with magnet embedded is shown in Figure 9c.
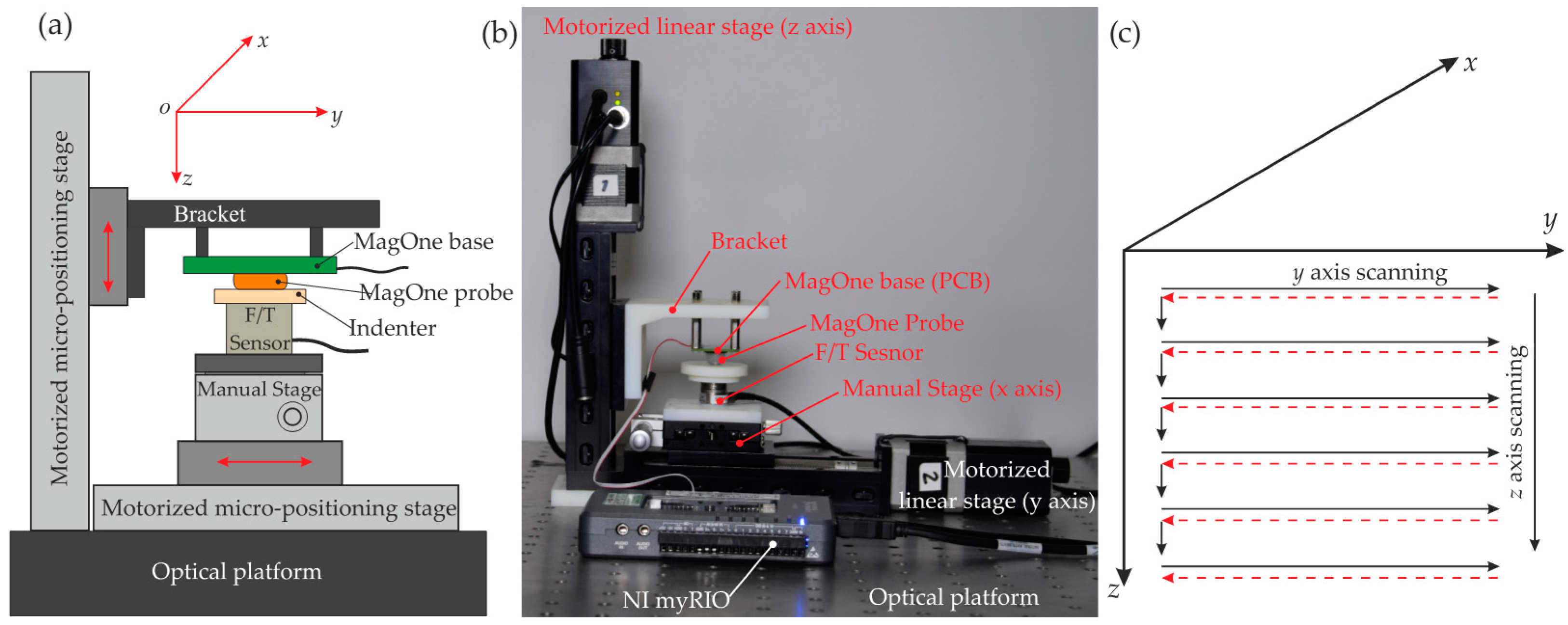
3.3. Calibration and Test Platform
4. Experimental Results
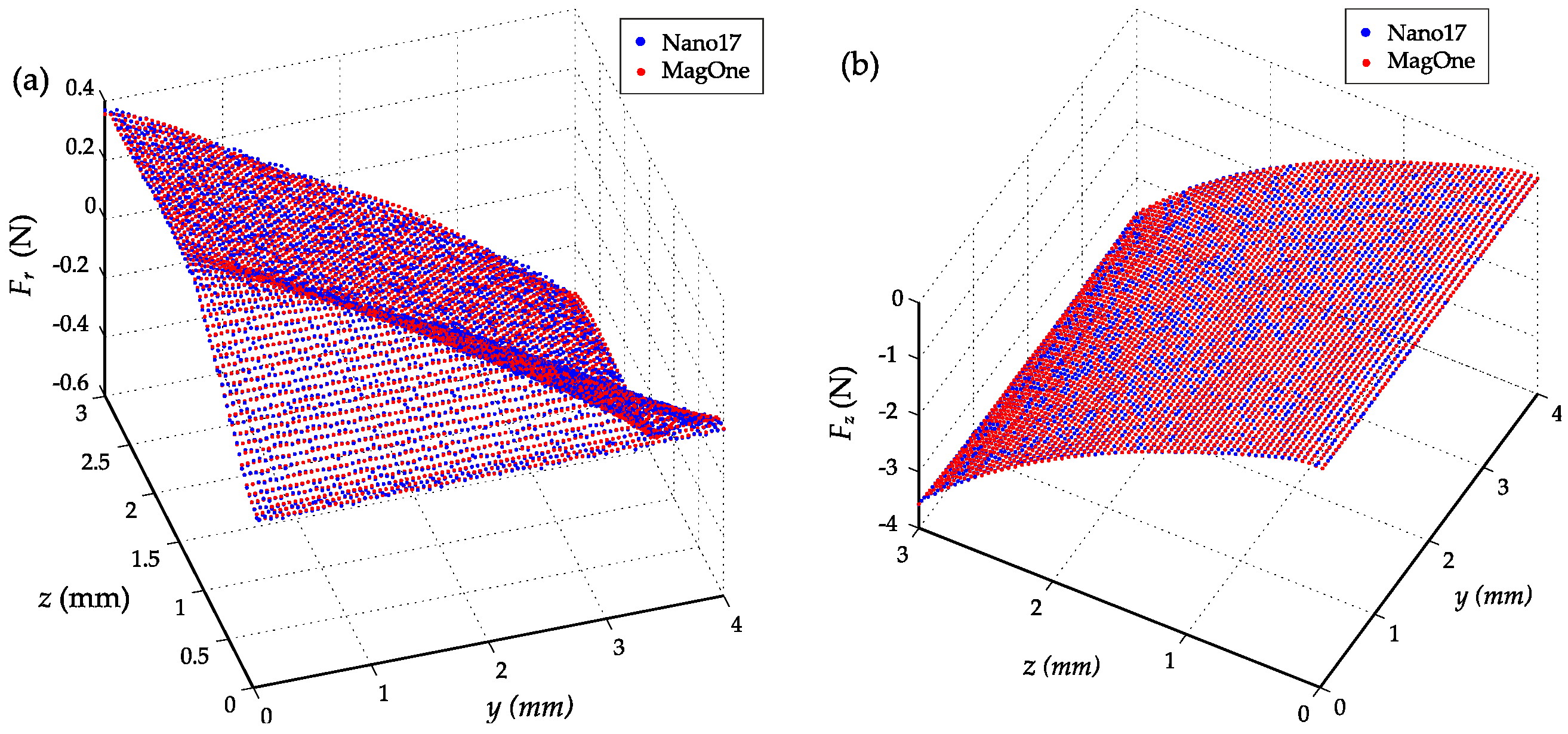
4.1. Sensor Calibration
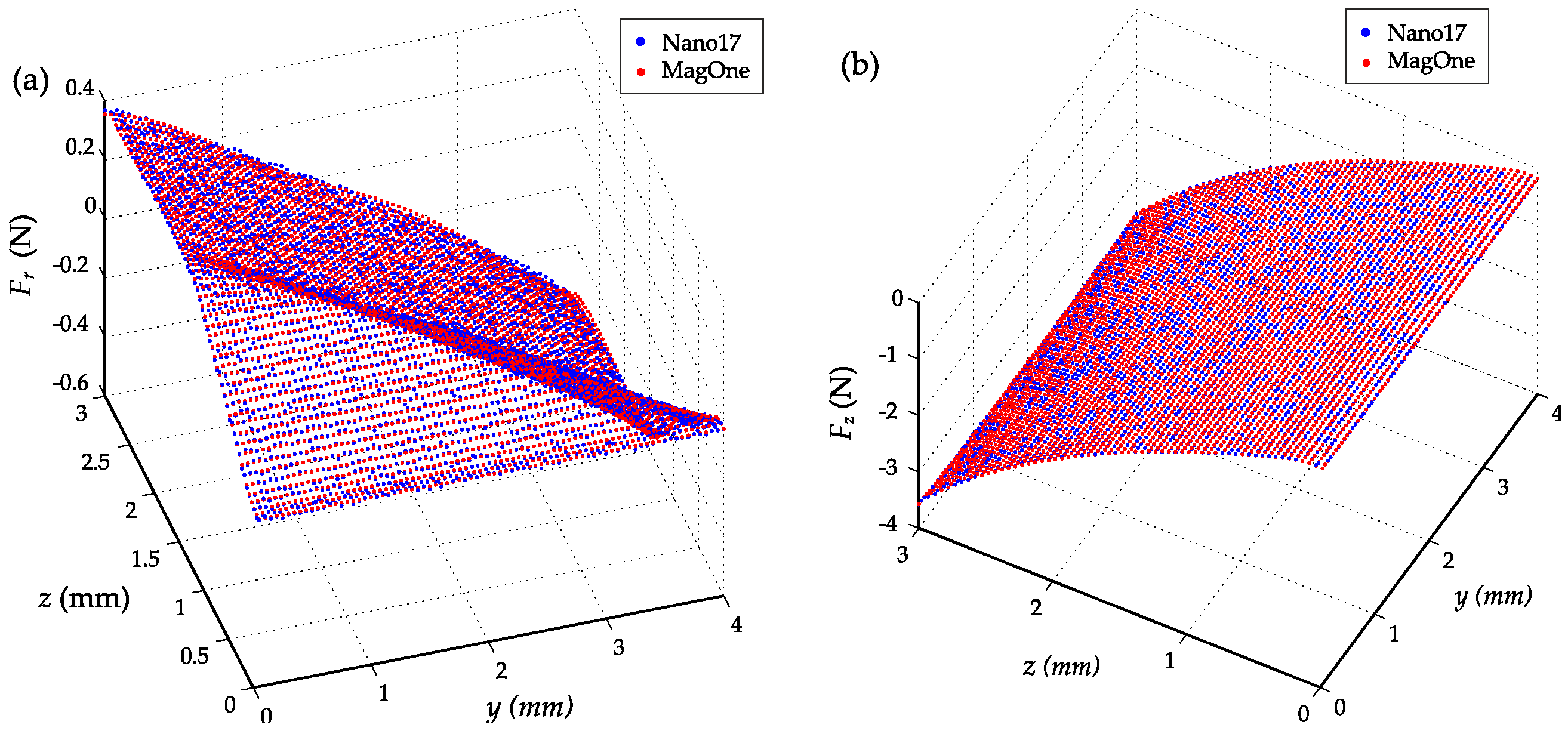
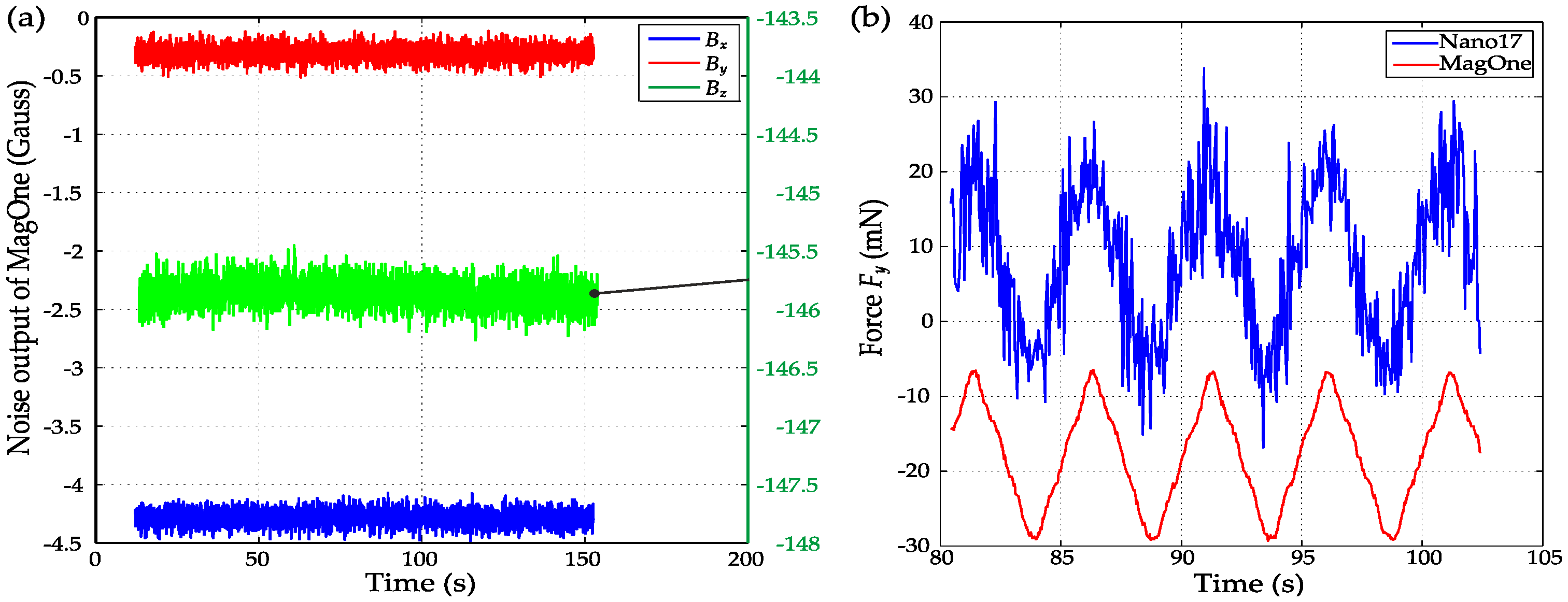
4.2. Performance Evaluation and Demonstration
5. Conclusions and Discussion
- Tilt effect: The magnetic field will also be changed when the magnet is tilted, which will currently be interpreted as a linear movement and, thus, introduce error into the force measurement. By using a second two degree of freedom reference sensor alongside the main 3D magnetic sensor, the tilt effect can be detected and compensated. Alternatively, the elastomer structure could be specifically designed to minimise tilt movement of the magnet and, thus, the induced error, if this were a particular requirement of the application.
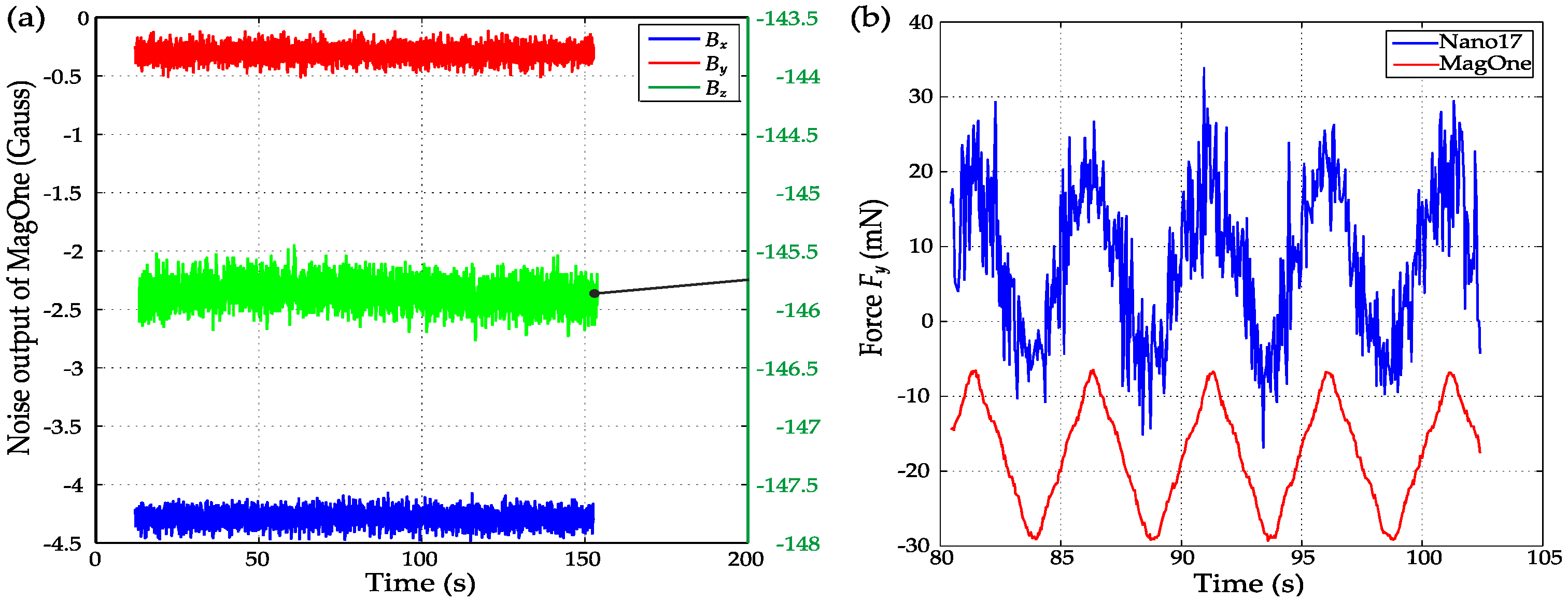
- Environmental interference: The variation of the magnetic field from other sources in the environment will influence the sensor measurement if their variation exceeds the resolution of the sensor. Since magnetic field strength decays rapidly with distance, these disturbances are negligible in many environments or can be minimised through careful design (e.g., using shielding or locating localised magnetic sources at a distance from the sensor). Using a second sensor as a reference would also help to minimise the noise from an external magnetic source, as discussed below.
- Interaction with ferromagnetic material: An inherent shortcoming of this technology is that the sensor cannot be used to interact with objects composed of ferromagnetic materials, since these will significantly alter the magnetic field source and, thus, induce large measurement errors.
- Measurement DoFs: monitoring multiple contact points or considering rotational aspects (e.g., the tilt effect discussed above), three-axis force mapping and objects’ topography reconstruction;
- Performance: measurement signals can be combined to improve measurement sensitivity and accuracy;
- Robustness: multiple measurement nodes enable the use of noise-suppression techniques to minimise background noise.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| MEMS | Microelectromechanical system |
| FEM | Finite element method |
| I2C | Inter-Integrated Circuit, alternatively written as I2C |
| SPI | Serial Peripheral Interface |
| RMS | Root mean square |
| MLS | Moving least square |
| PCB | Printed circuit board |
| F/T | Force/torque |
| FS | Full scale |
| DoFs | Degrees of freedom |
References
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Bauer, S.; Bauer-Gogonea, S.; Graz, I.; Kaltenbrunner, M.; Keplinger, C.; Schwödiauer, R. 25th anniversary article: A soft future: From robots and sensor skin to energy harvesters. Adv. Mater. 2014, 26, 149–162. [Google Scholar] [CrossRef] [PubMed]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Cutkosky, M.R.; Howe, R.D.; Provancher, W.R. Force and tactile sensors. In Springer Handbook of Robotics; Springer: Berlin, Germany; Heidelberg, Germany, 2008; pp. 455–476. [Google Scholar]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Tenzer, Y.; Jentoft, L.P.; Howe, R.D. The feel of MEMS barometers: Inexpensive and easily customized tactile array sensors. IEEE Robot. Autom. Mag. 2014, 21, 89–95. [Google Scholar] [CrossRef]
- Assaf, T.; Roke, C.; Rossiter, J.; Pipe, T.; Melhuish, C. Seeing by touch: Evaluation of a soft biologically-inspired artificial fingertip in real-time active touch. Sensors 2014, 14, 2561–2577. [Google Scholar] [CrossRef] [PubMed]
- 3-Axis Force Sensor Family. Available online: http://optoforce.com/3dsensor/ (accessed on 23 August 2016).
- The BioTac. Available online: http://www.syntouchllc.com/Products/BioTac/ (accessed on 23 August 2016).
- Lee, H.K.; Chung, J.; Chang, S.I.; Yoon, E. Real-time measurement of the three-axis contact force distribution using a flexible capacitive polymer tactile sensor. J. Micromech. Microeng. 2011, 21, 035010. [Google Scholar] [CrossRef]
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C.F. Flexible tactile sensing based on piezoresistive composites: A review. Sensors 2014, 14, 5296–5332. [Google Scholar] [CrossRef] [PubMed]
- Pan, L.; Chortos, A.; Yu, G.; Wang, Y.; Isaacson, S.; Allen, R.; Shi, Y.; Dauskardt, R.; Bao, Z. An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film. Nat. Commun. 2014, 5. [Google Scholar] [CrossRef] [PubMed]
- Clark, J.J. A magnetic field based compliance matching sensor for high resolution, high compliance tactile sensing. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 772–777.
- Ledermann, C.; Wirges, S.; Oertel, D.; Mende, M.; Woern, H. Tactile sensor on a magnetic basis using novel 3D hall sensor-first prototypes and results. In Proceedings of the 2013 IEEE 17th International Conference on Intelligent Engineering Systems (INES), San Jose, CA, USA, 19–21 June 2013; pp. 55–60.
- Jamone, L.; Natale, L.; Metta, G.; Sandini, G. Highly sensitive soft tactile sensors for an anthropomorphic robotic hand. IEEE Sens. J. 2015, 15, 4226–4233. [Google Scholar] [CrossRef]
- Takenawa, S. A magnetic type tactile sensor using a two-dimensional array of inductors. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3295–3300.
- Youssefian, S.; Rahbar, N.; Torres-Jara, E. Contact behavior of soft spherical tactile sensors. IEEE Sens. J. 2014, 14, 1435–1442. [Google Scholar] [CrossRef]
- Chathuranga, D.S.; Wang, Z.; Noh, Y.; Nanayakkara, T.; Hirai, S. Disposable soft 3 axis force sensor for biomedical applications. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 5521–5524.
- Tomo, T.P.; Somlor, S.; Schmitz, A.; Jamone, L.; Huang, W.; Kristanto, H.; Sugano, S. Design and characterization of a three-axis hall effect-based soft skin sensor. Sensors 2016, 16, 491. [Google Scholar] [CrossRef] [PubMed]
- Novel Magnetic Displacement Sensors. Available online: http://www.gmw.com/magnetic_sensors/sen-tron/2sa/documents/TN_Novel_MDS_12nov02.pdf (accessed on 23 August 2016).
- Camacho, J.; Sosa, V. Alternative method to calculate the magnetic field of permanent magnets with azimuthal symmetry. Rev. Mex. Fís. E 2013, 59, 8–17. [Google Scholar]
- Díaz-Michelena, M. Small magnetic sensors for space applications. Sensors 2009, 9, 2271–2288. [Google Scholar] [CrossRef] [PubMed]
- Lenz, J.; Edelstein, A.S. Magnetic sensors and their applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Schott, C.; Burger, F.; Blanchard, H.; Chiesi, L. Modern integrated silicon Hall sensors. Sensor Rev. 1998, 18, 252–257. [Google Scholar] [CrossRef]
- 3D Magnetic Sensor-Infineon. Available online: http://www.infineon.com/cms/en/product/sensor/magnetic-position-sensor/3d-magnetic-sensor/channel.html?channel=5546d4624c9e0f0e014c9e105a8a001c#ispnTab1 (accessed on 23 August 2016).
- MLX90393 Temperature Compensation. Available online: http://www.melexis.com/Assets/MLX90393-Temperature-Compensation-6511.aspx (accessed on 23 August 2016).
- MLX90393 DataSheet. Available online: http://www.melexis.com/Assets/MLX90393-Datasheet-6427.aspx (accessed on 23 August 2016).
- TLV493D-A1B6 DataSheet. Available online: http://www.infineon.com/cms/en/product/sensor/magnetic-position-sensor/3d-magnetic-sensor/TLV493DA1B6/productType.html?productType=5546d462525dbac-401529cebc74f07b7 (accessed on 23 August 2016).
- AS54XX DataSheet. Available online: http://ams.com/eng/Products/Magnetic-Position-Sensors/Linear-Position/AS5403 (accessed on 23 August 2016).
- Bauchau, O.; Craig, J. Euler-Bernoulli beam theory. In Structural Analysis; Springer: Berlin, Germany; Heidelberg, Germany, 2009; pp. 173–221. [Google Scholar]
- Vithanage, D.K.; Wang, Z.; Noh, Y.; Nanayakkara, T.; Hirai, S. Magnetic and mechanical modelling of a soft three-axis force sensor. IEEE Sens. J. 2016, 16, 5298–5307. [Google Scholar]
- Fu, Y.B.; Ogden, R.W. Nonlinear Elasticity: Theory and Applications; Cambridge University Press: Cambridge, UK, 2001; Volume 281. [Google Scholar]
- Machado, G.; Chagnon, G.; Favier, D. Analysis of the isotropic models of the Mullins effect based on filled silicone rubber experimental results. Mech. Mater. 2010, 42, 841–851. [Google Scholar] [CrossRef]
- Loweth, E.; de Boer, G.; Toropov, V. Practical recommendations on the use of moving least squares metamodel building. In Proceedings of the Thirteenth International Conference on Civil, Structural and Environmental Engineering Computing, Crete, Greece, 6–9 September 2011.






© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; De Boer, G.; Kow, J.; Alazmani, A.; Ghajari, M.; Hewson, R.; Culmer, P. Design Methodology for Magnetic Field-Based Soft Tri-Axis Tactile Sensors. Sensors 2016, 16, 1356. https://doi.org/10.3390/s16091356
Wang H, De Boer G, Kow J, Alazmani A, Ghajari M, Hewson R, Culmer P. Design Methodology for Magnetic Field-Based Soft Tri-Axis Tactile Sensors. Sensors. 2016; 16(9):1356. https://doi.org/10.3390/s16091356
Chicago/Turabian StyleWang, Hongbo, Greg De Boer, Junwai Kow, Ali Alazmani, Mazdak Ghajari, Robert Hewson, and Peter Culmer. 2016. "Design Methodology for Magnetic Field-Based Soft Tri-Axis Tactile Sensors" Sensors 16, no. 9: 1356. https://doi.org/10.3390/s16091356