
SiDIVS: Simple Detection of Inductive Vehicle Signatures with a Multiplex Resonant Sensor

Abstract
:1. Introduction
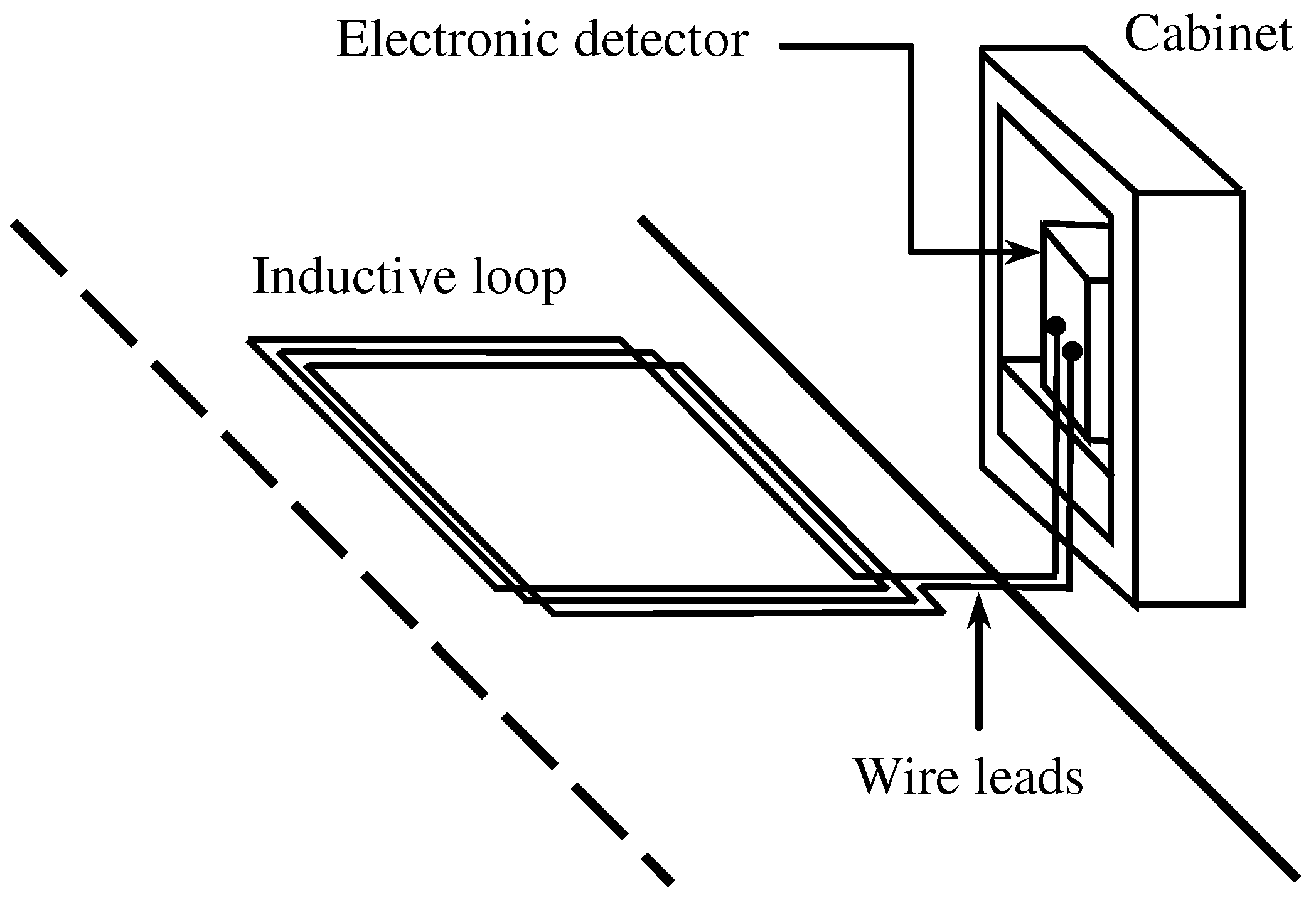
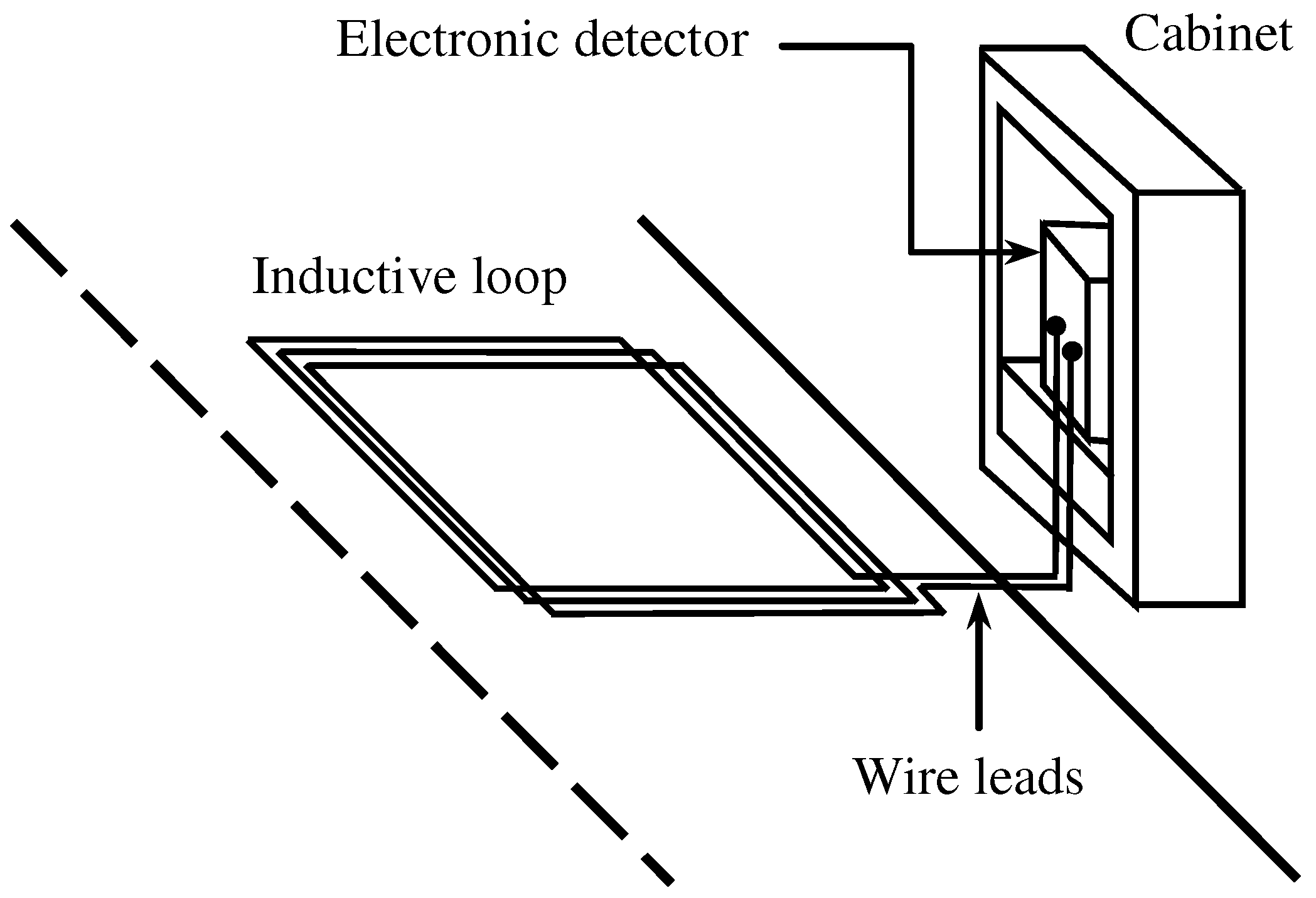
2. Inductive Loop Detectors
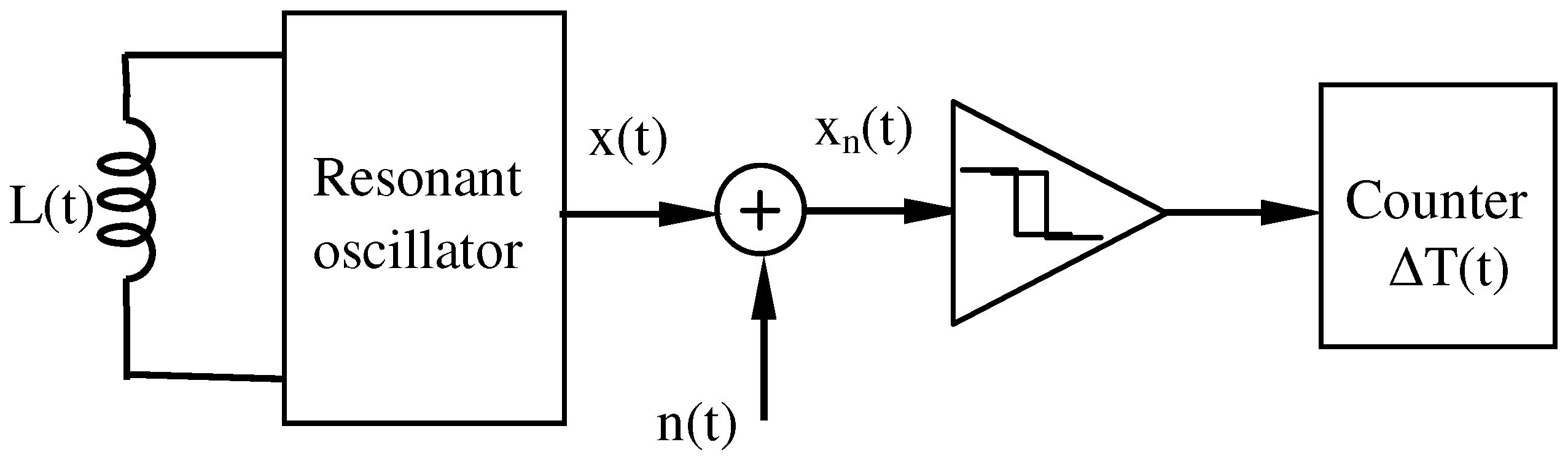
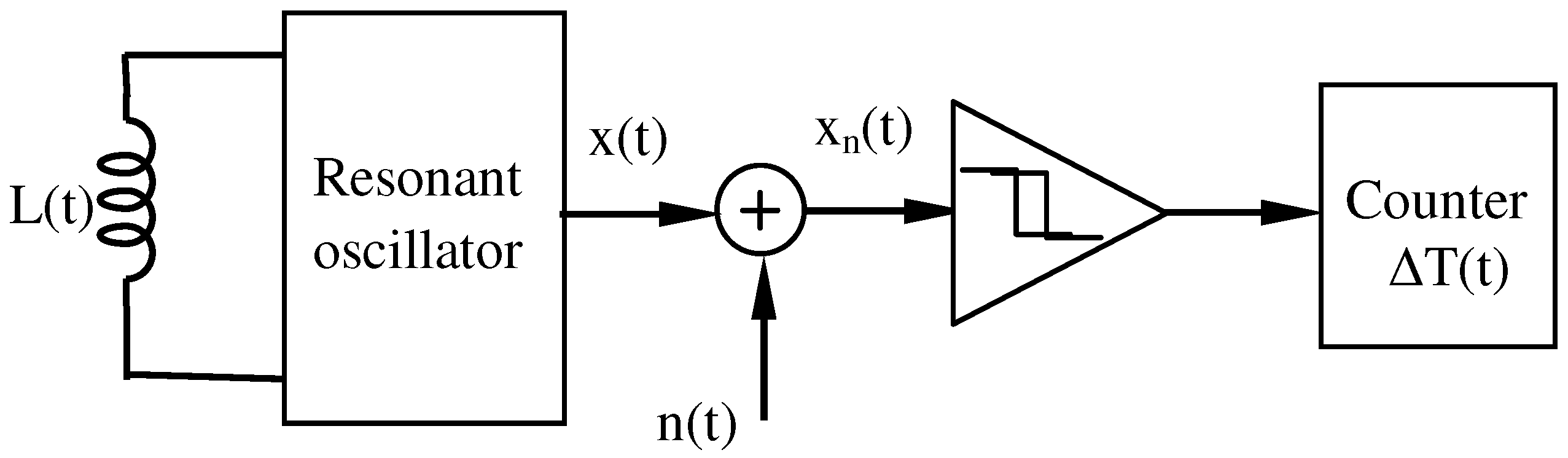
2.1. Resonant ILDs
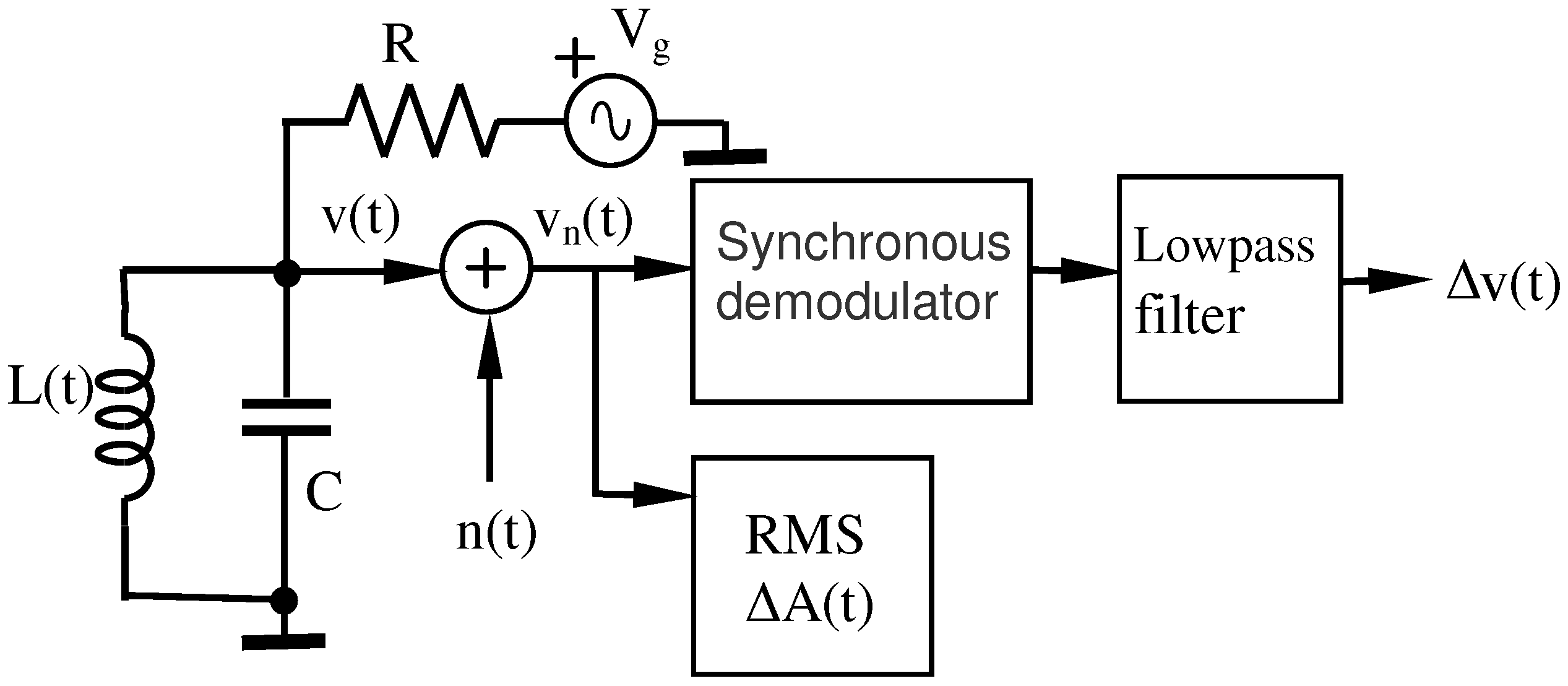
2.2. Amplitude ILDs
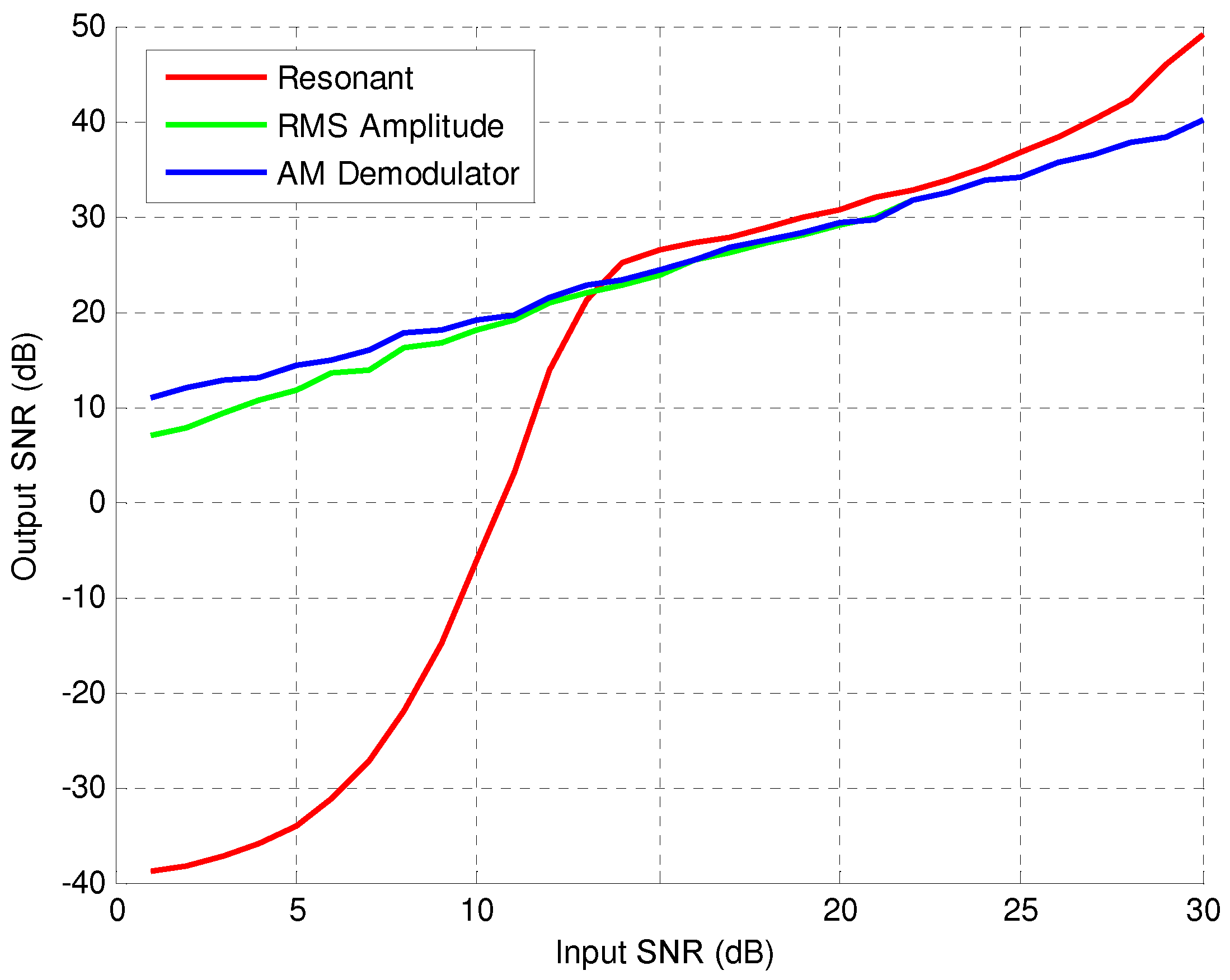
3. Impact of Noise on Digital Detectors
3.1. Impact of Noise on Resonant Detectors
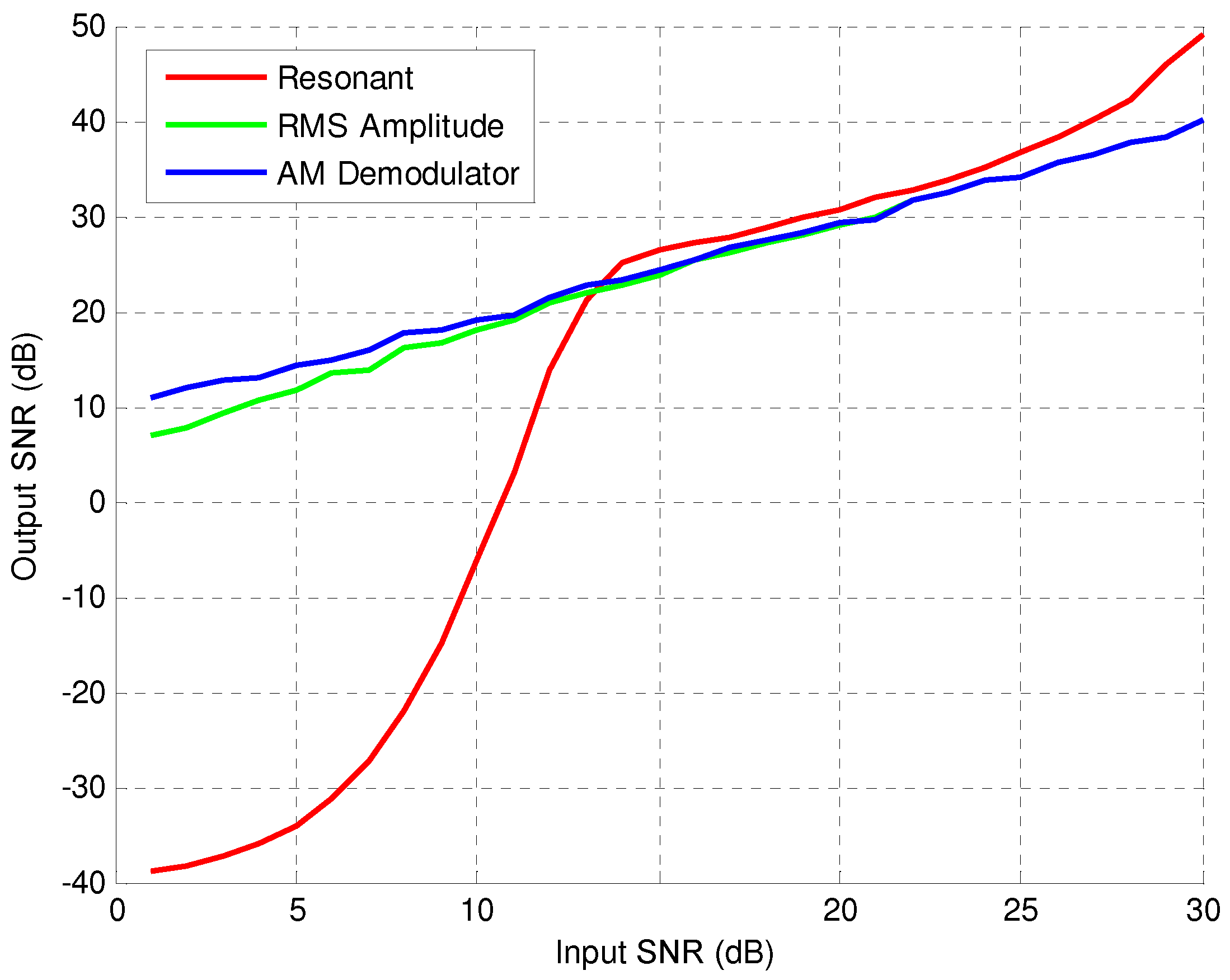
3.2. Impact of Noise on Amplitude Detectors
Synchronous Demodulator (SD)
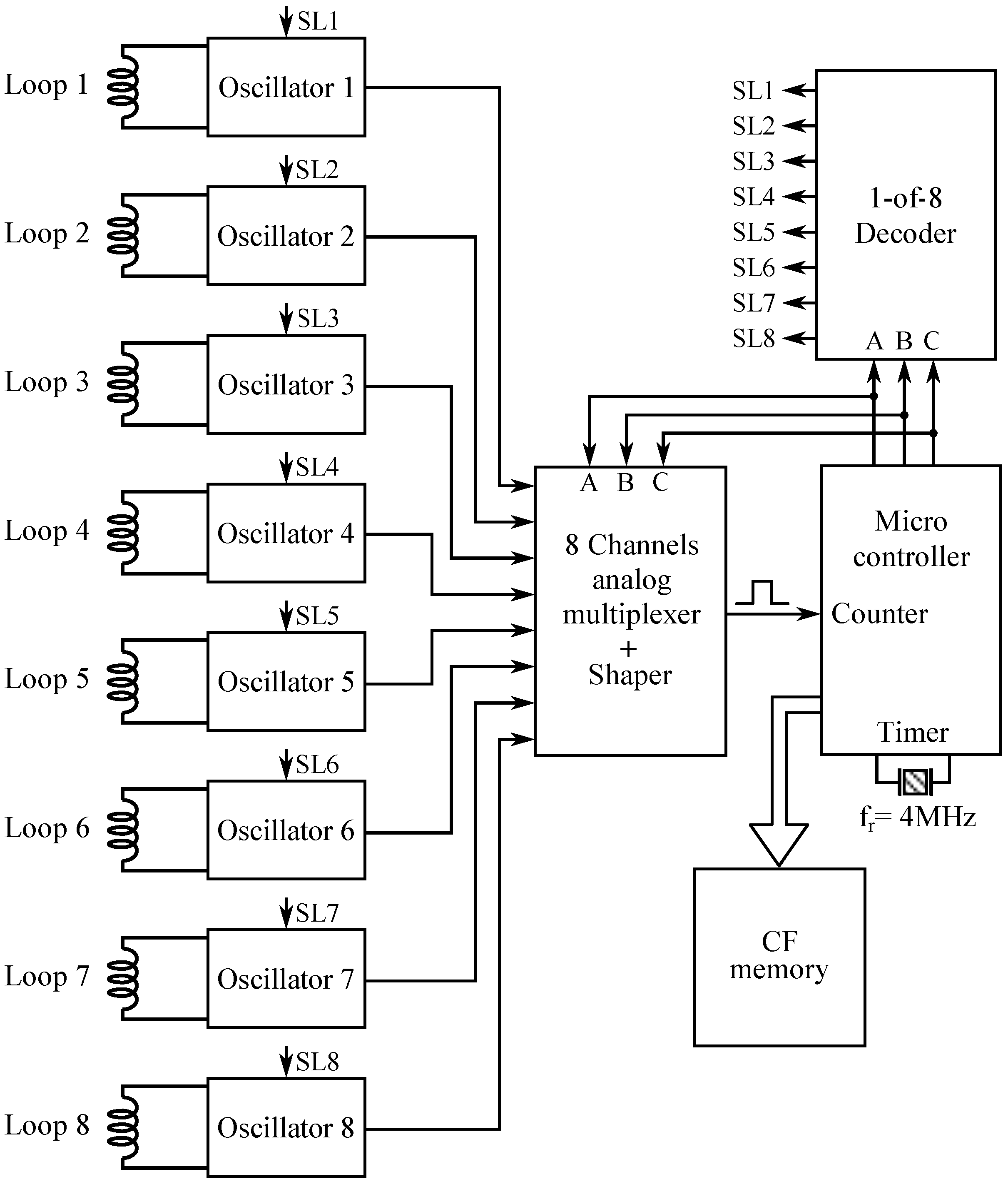
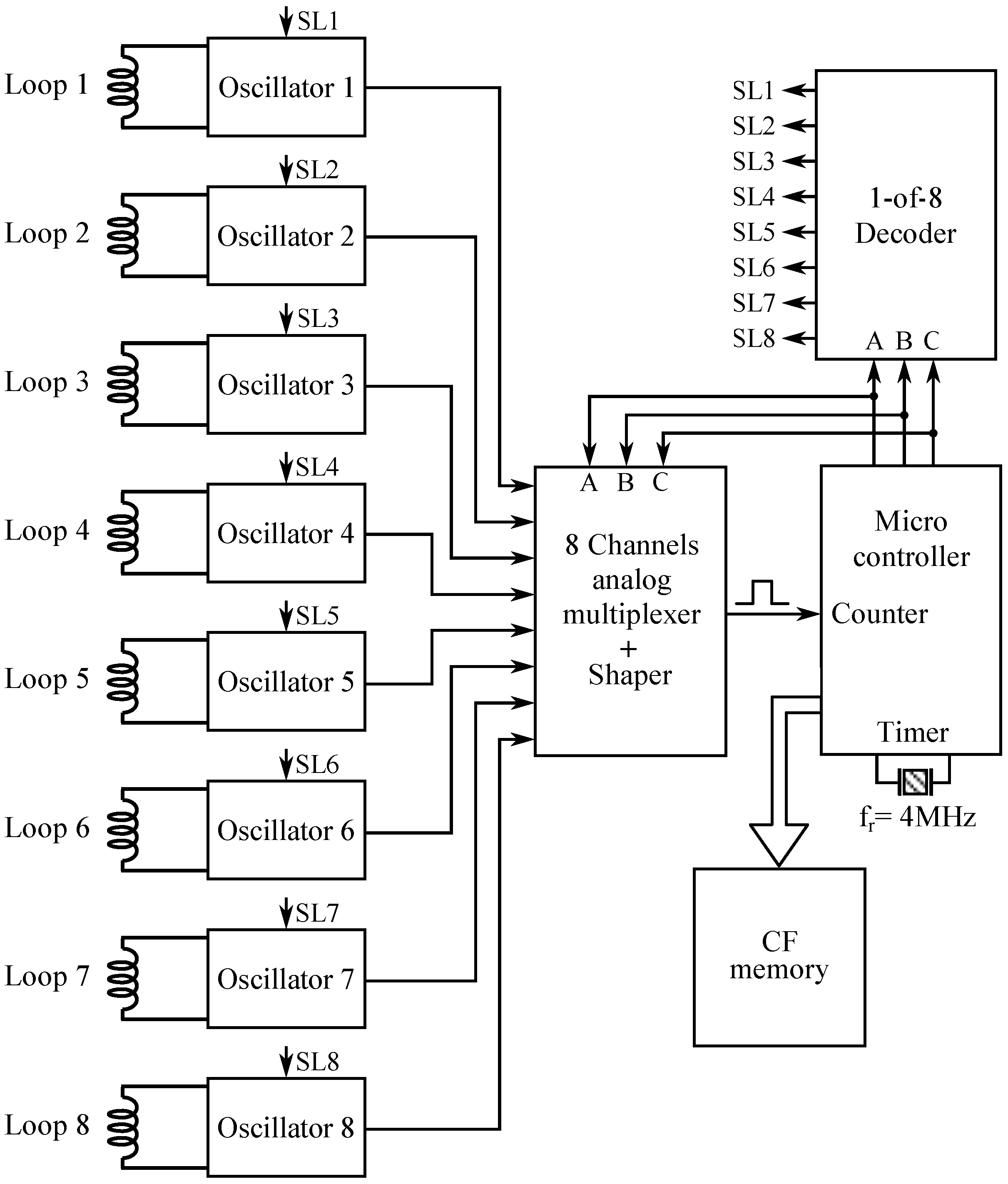
4. Proposed Design of an Inductive Detector
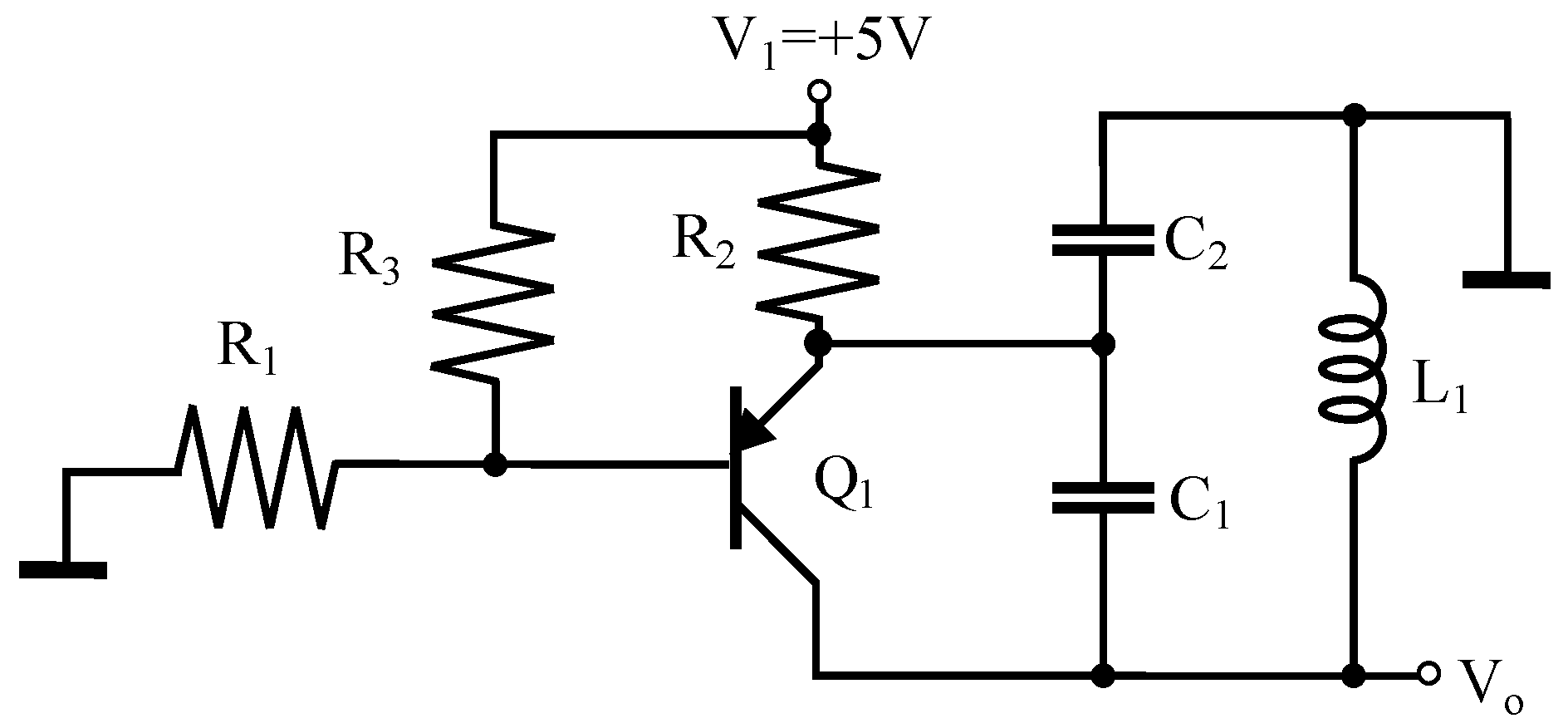
4.1. Colpitts Oscillator
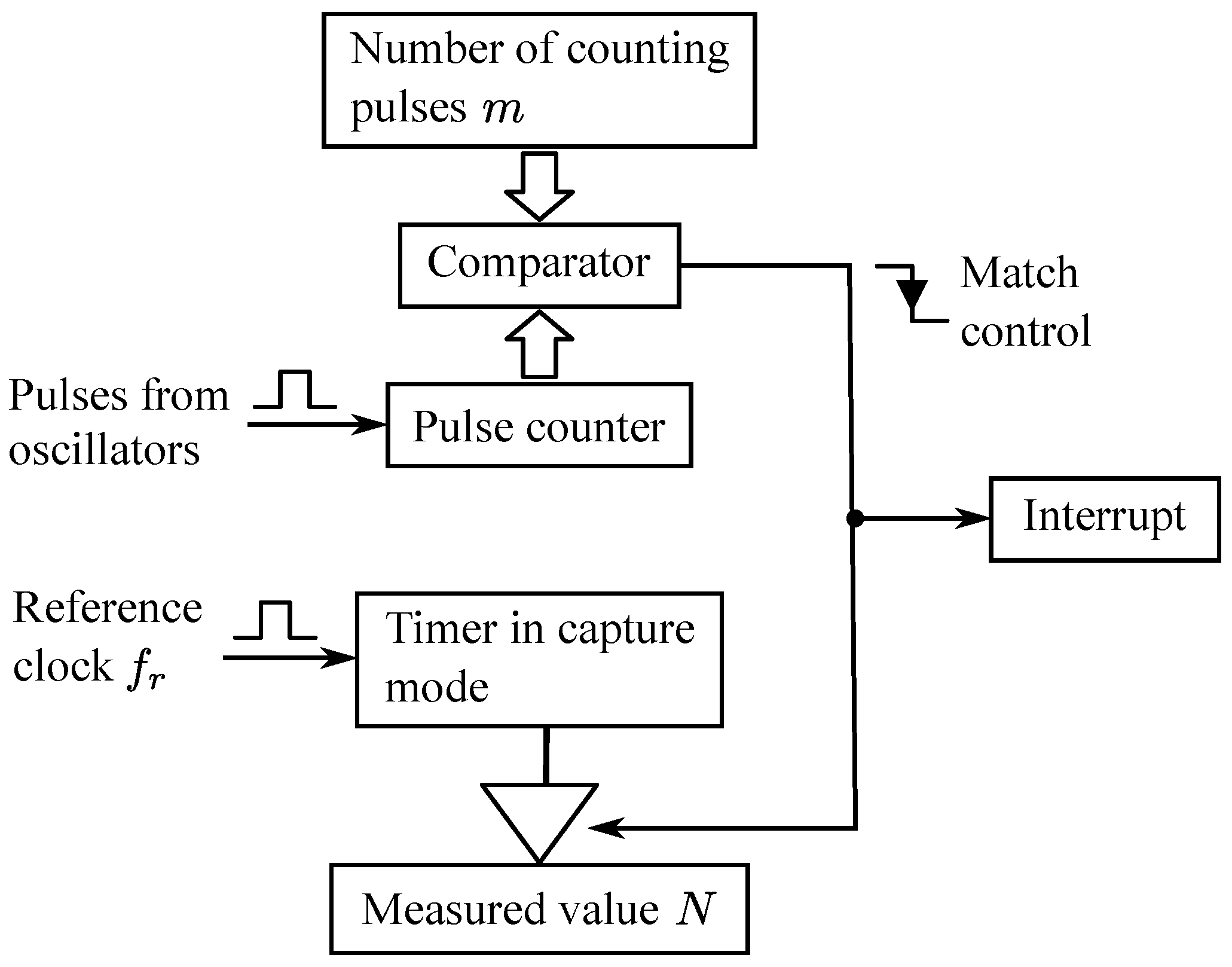
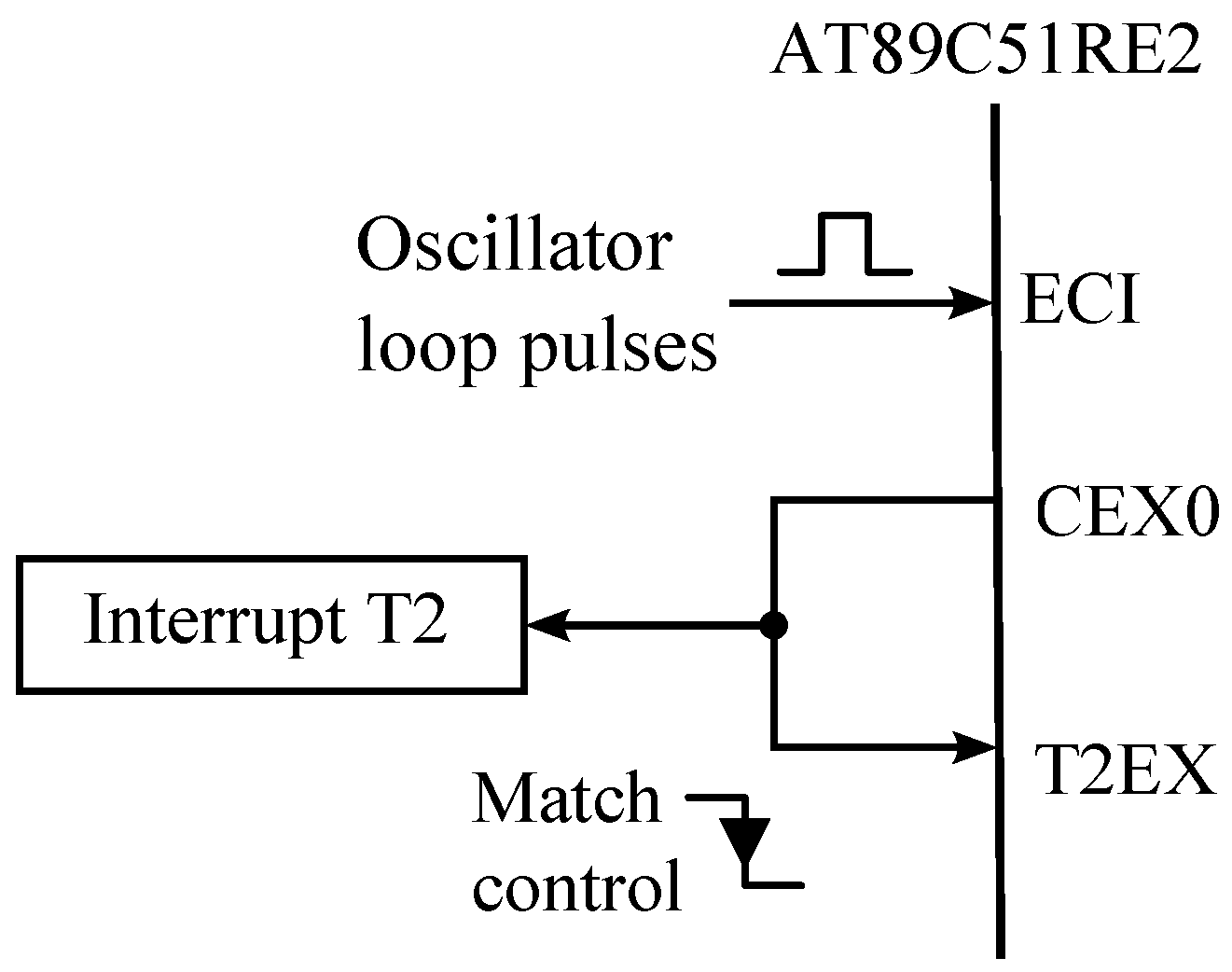
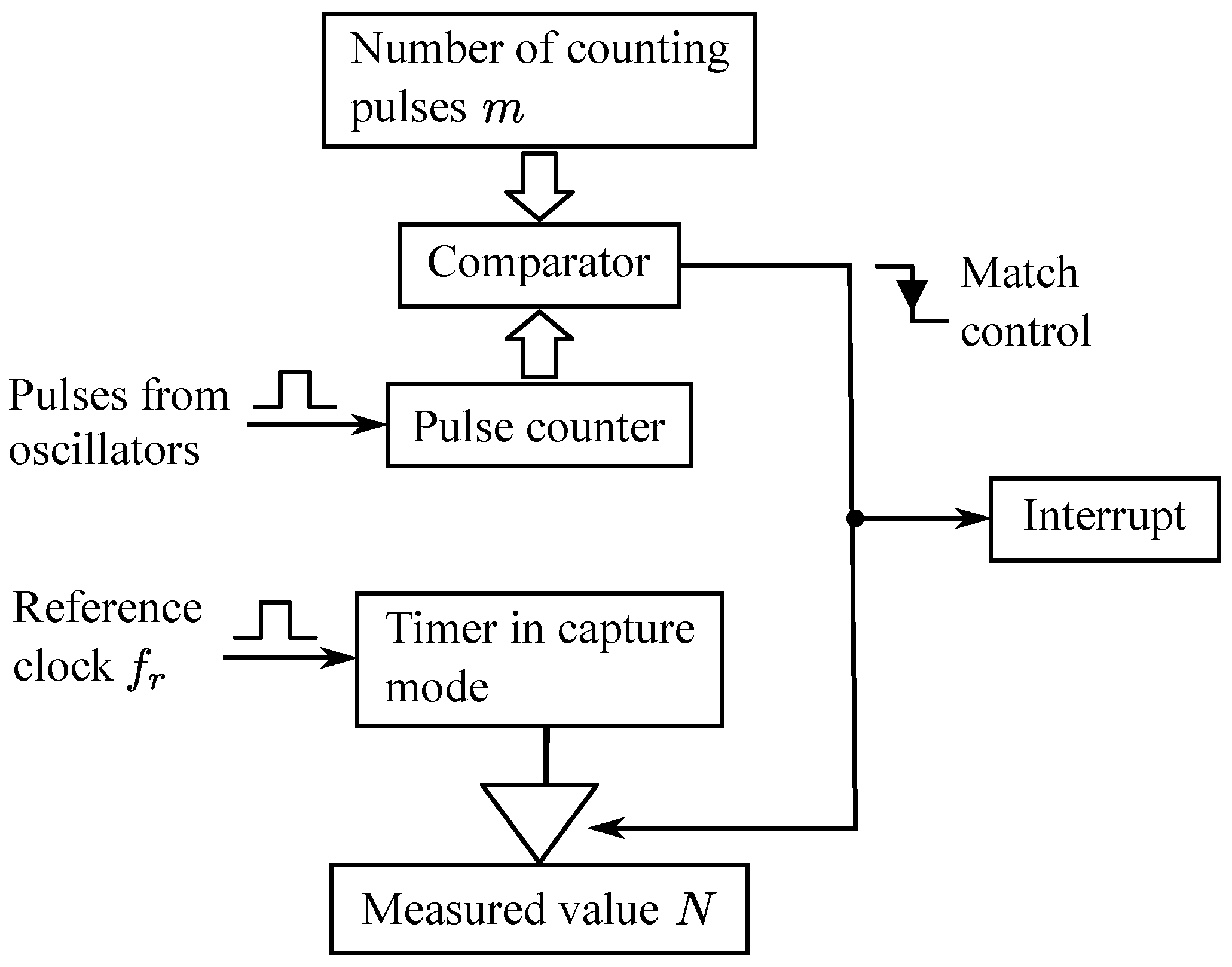
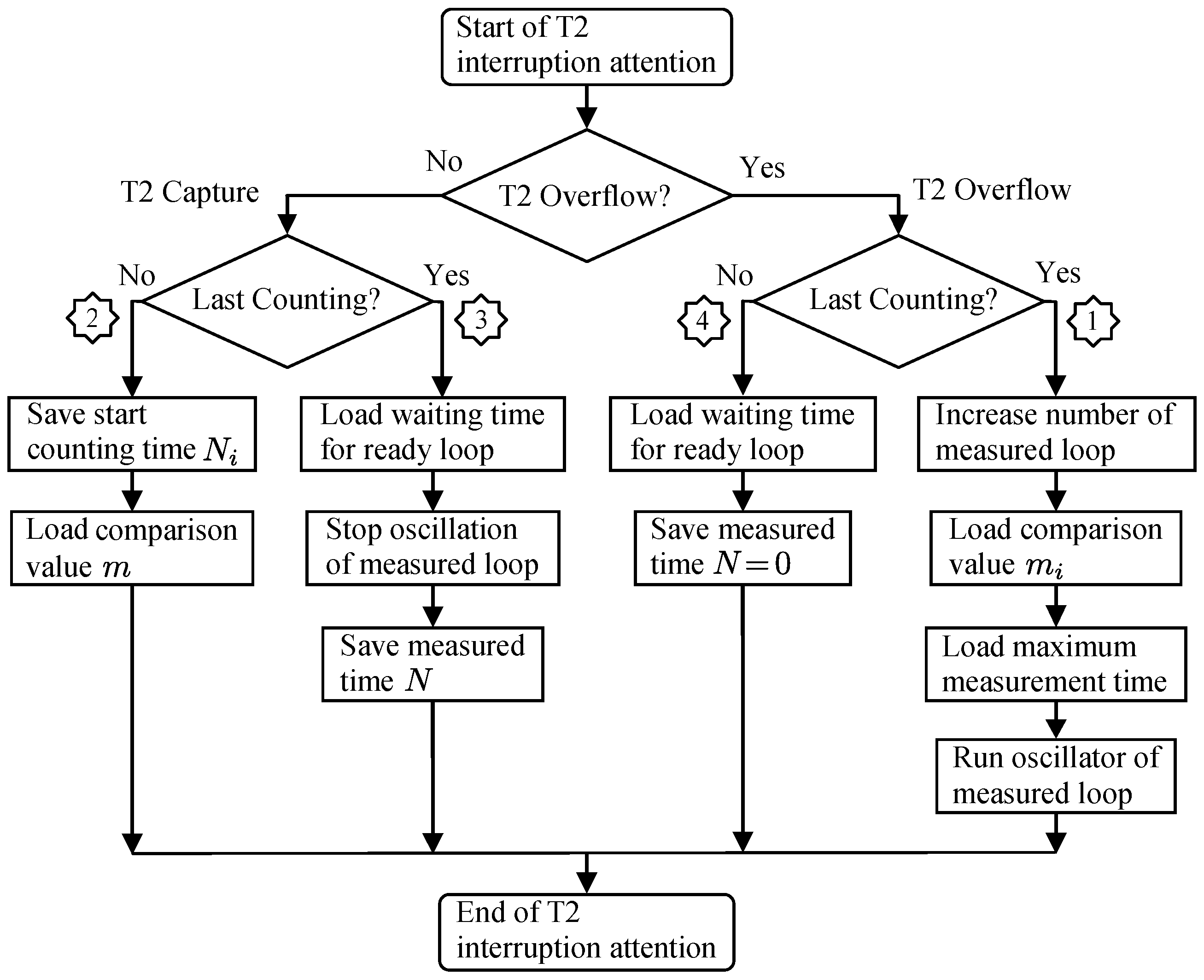
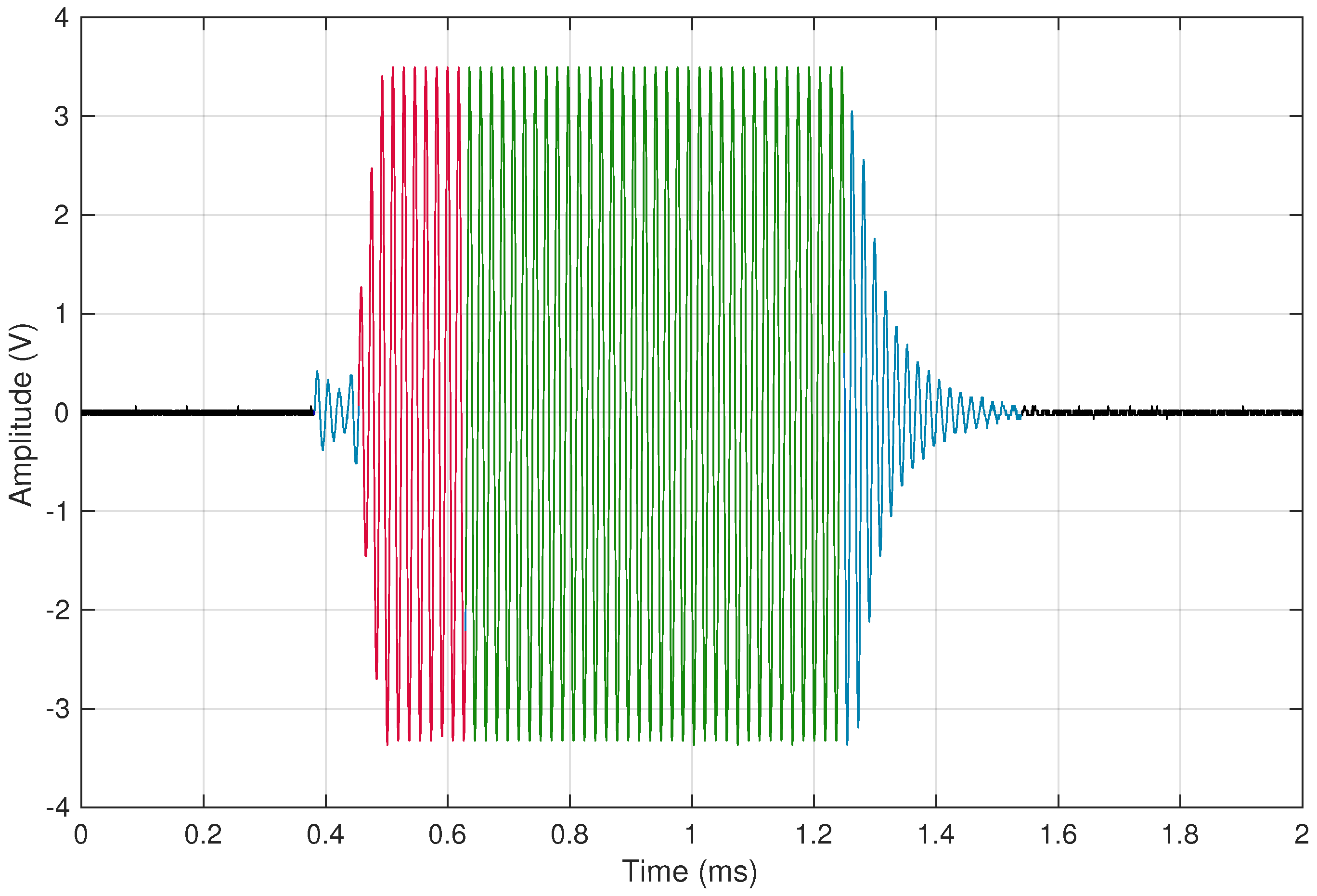
4.2. Pulse Counter
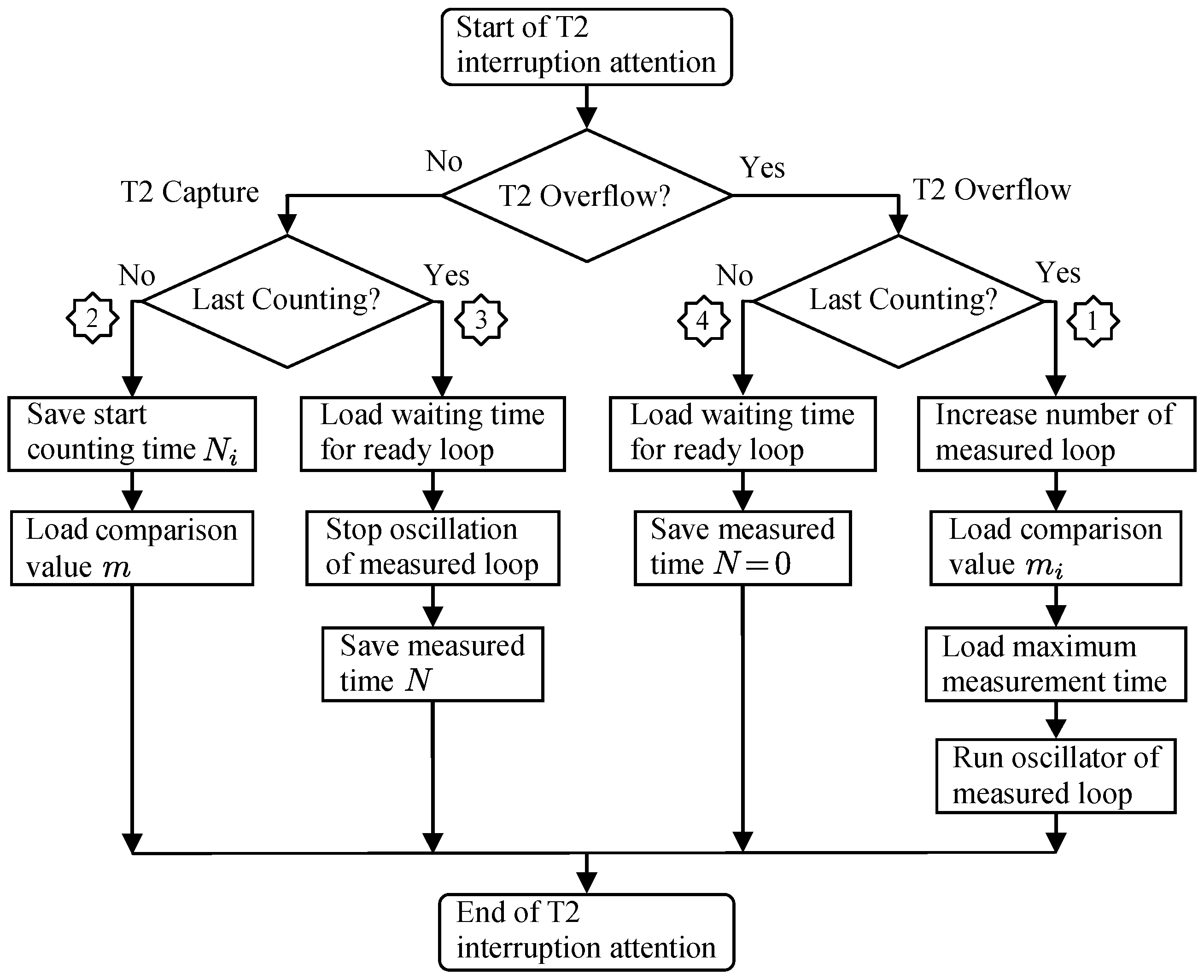
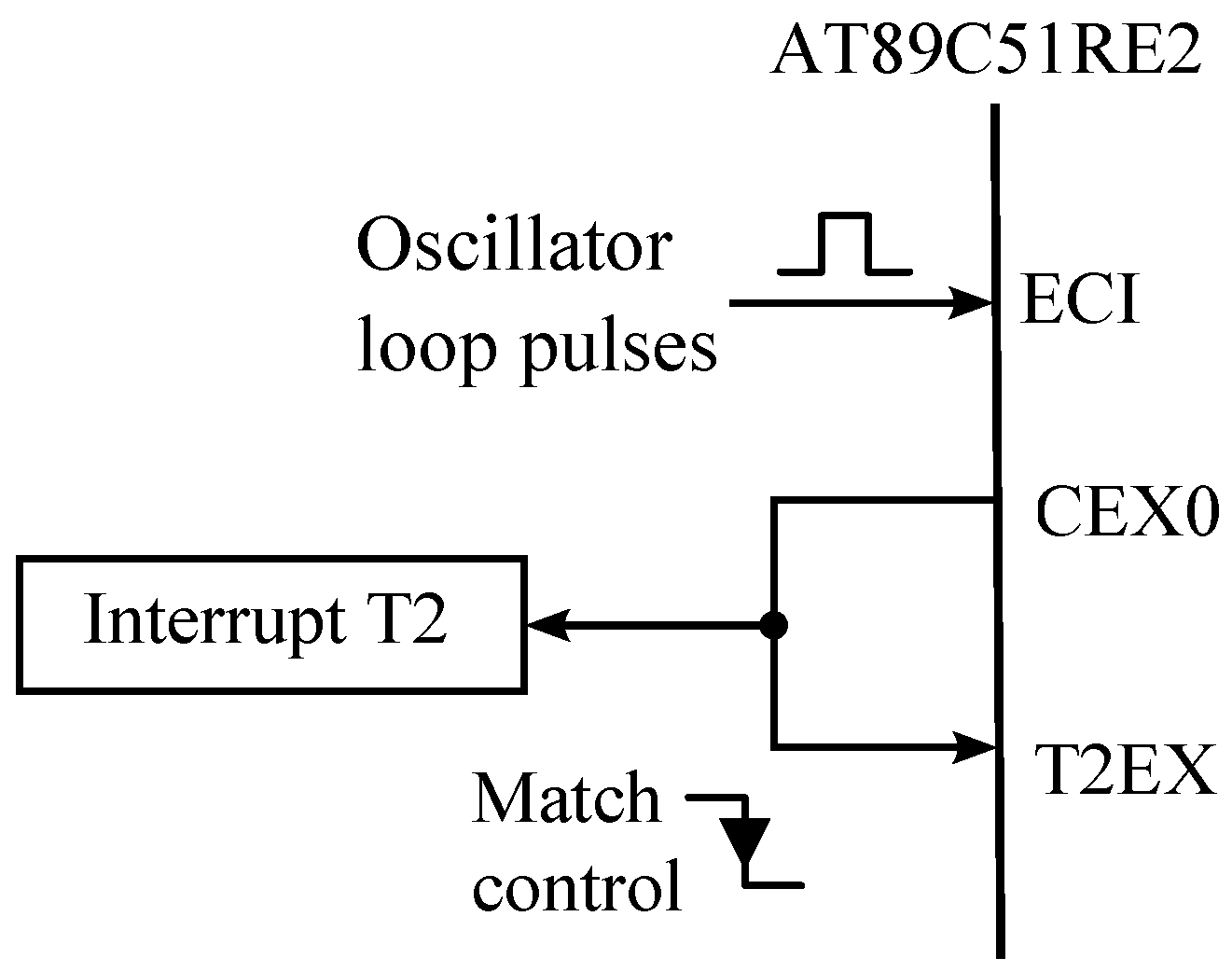
4.3. Measurement
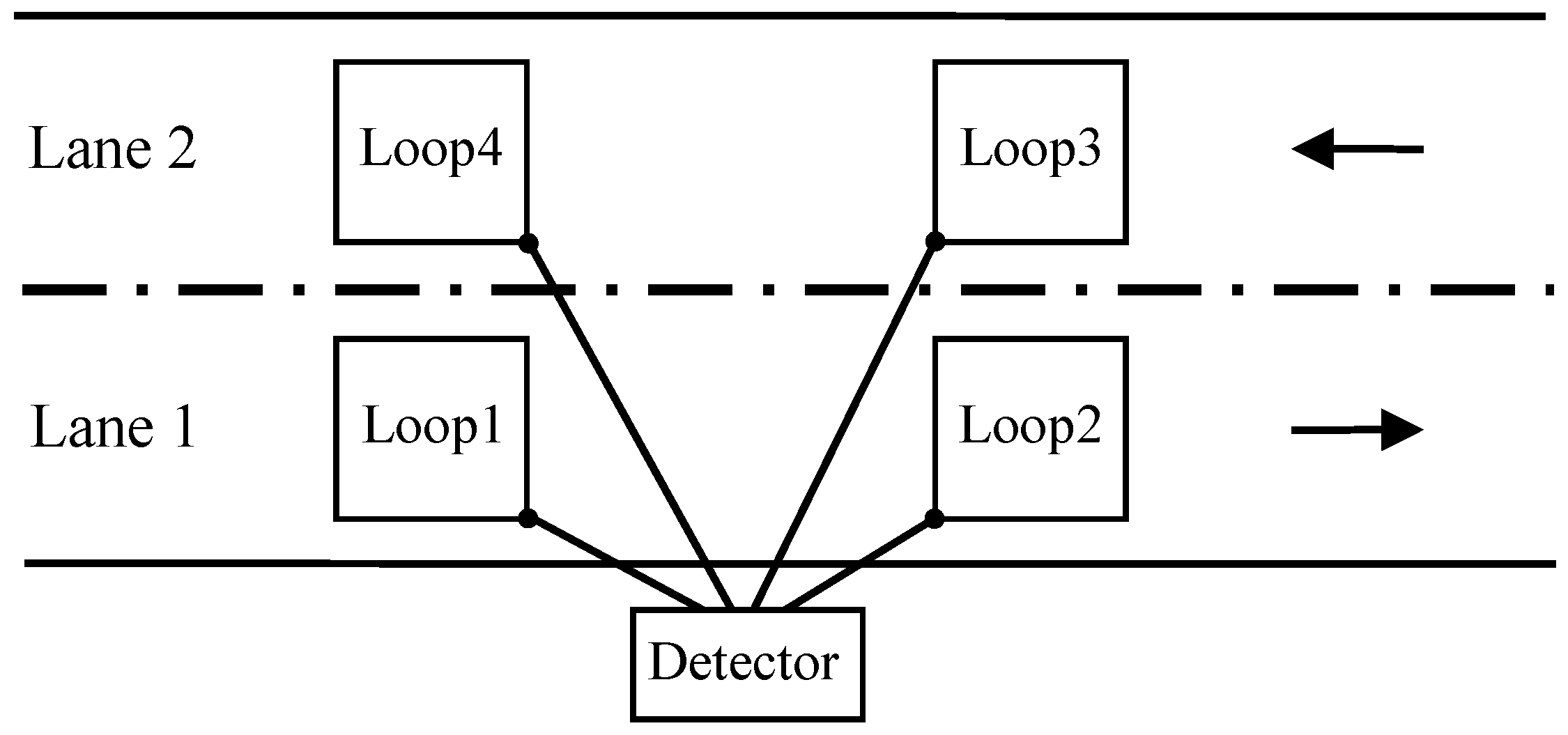
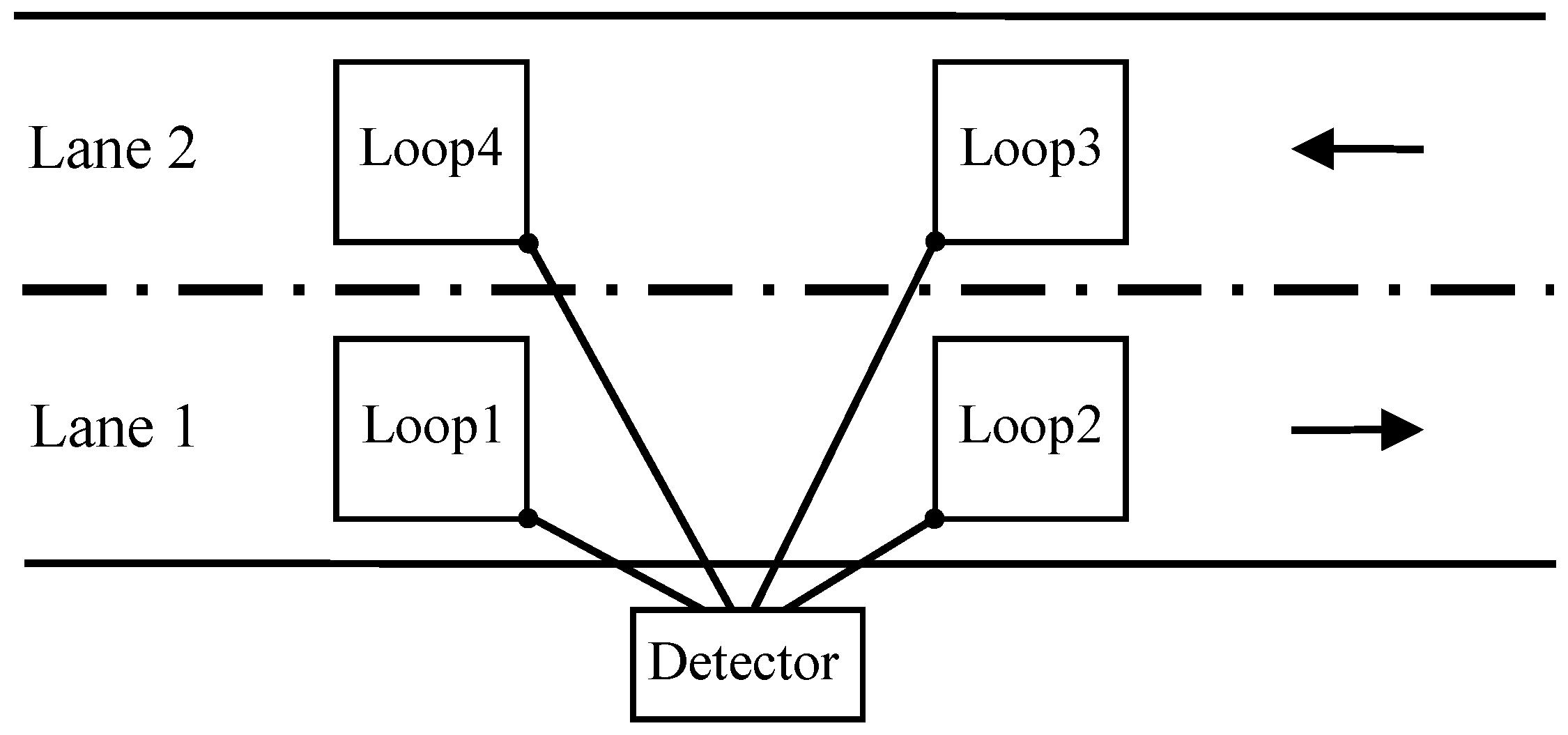
4.4. Registration
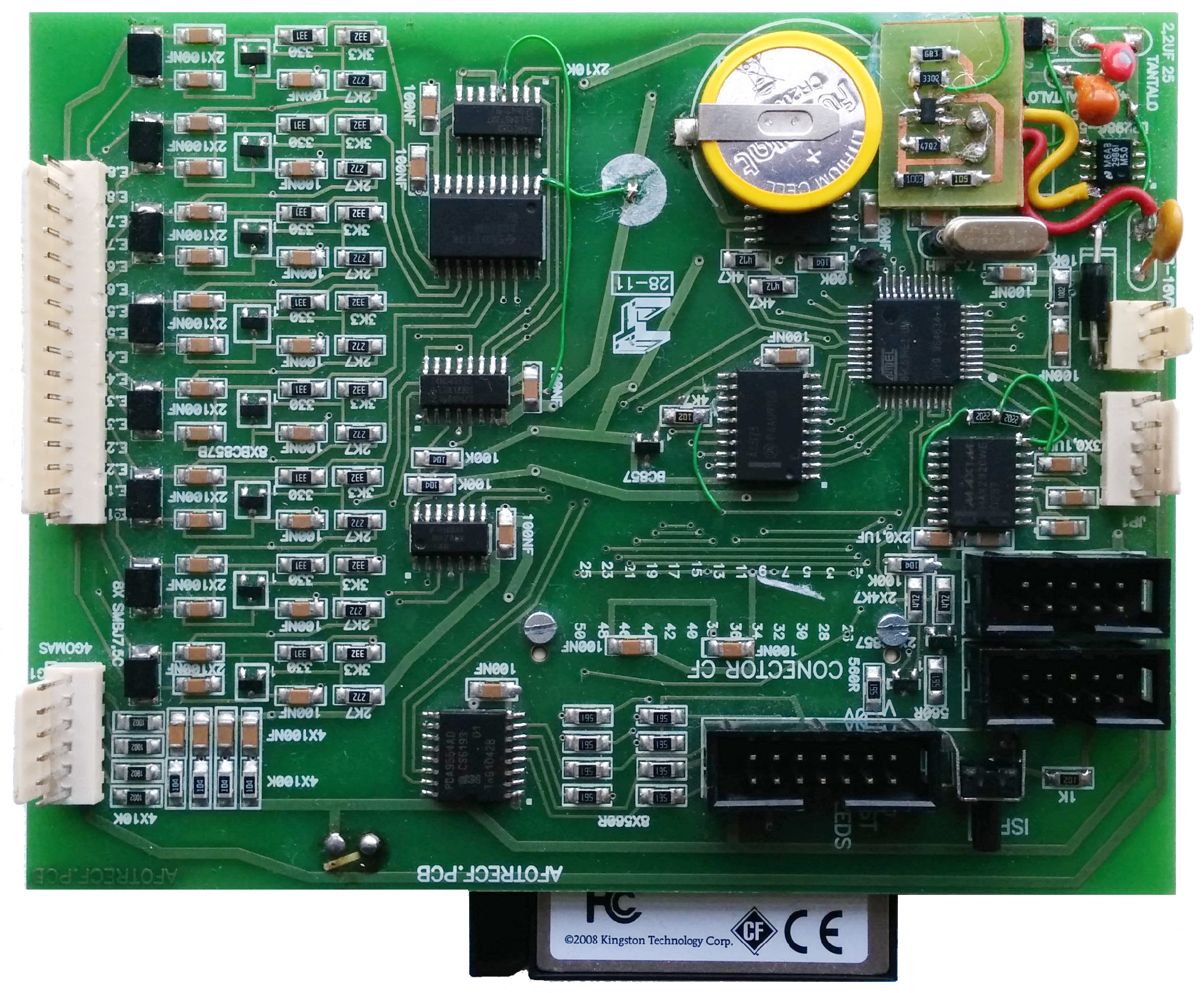
5. Experimental Section
6. Results and Discussion
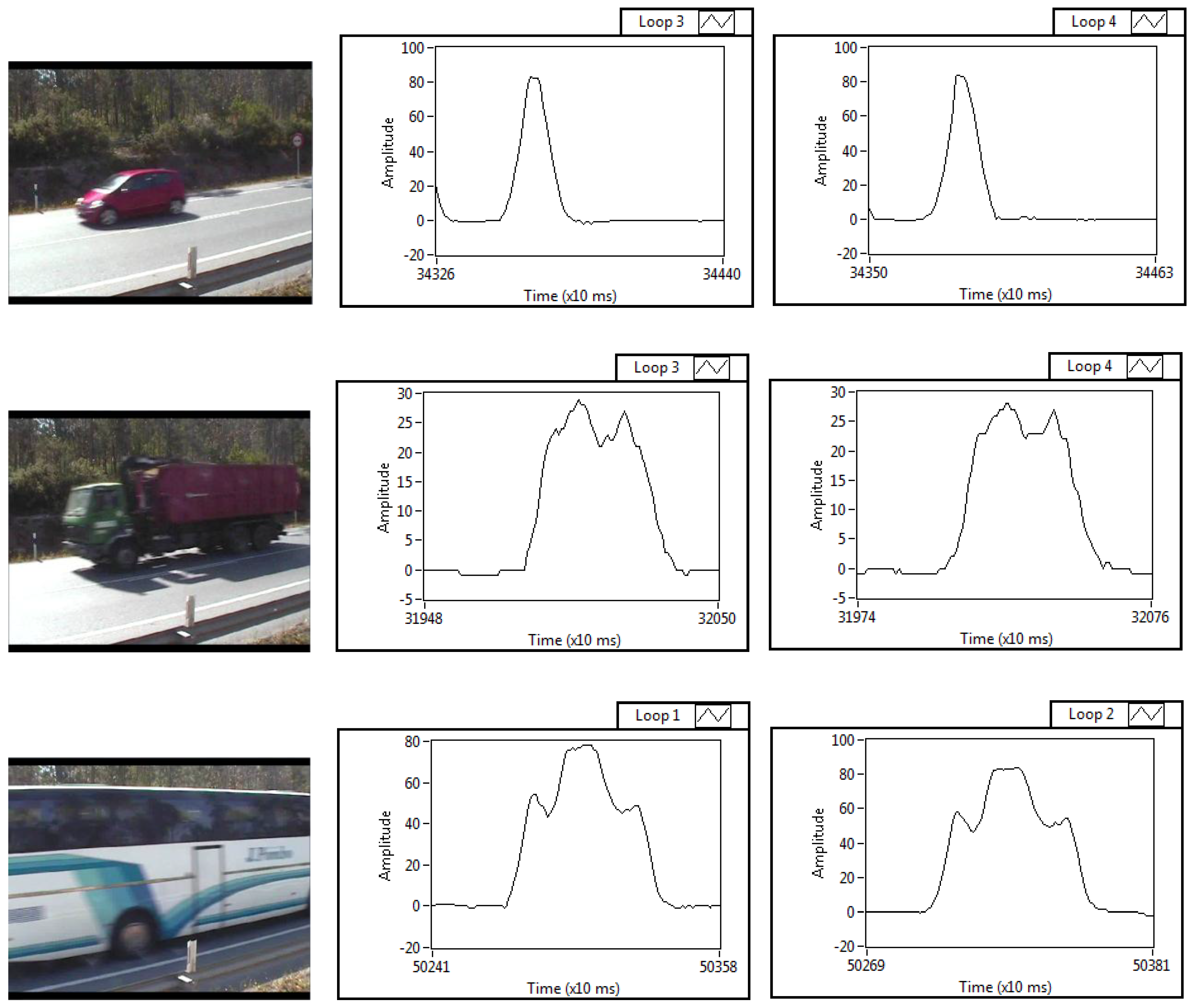
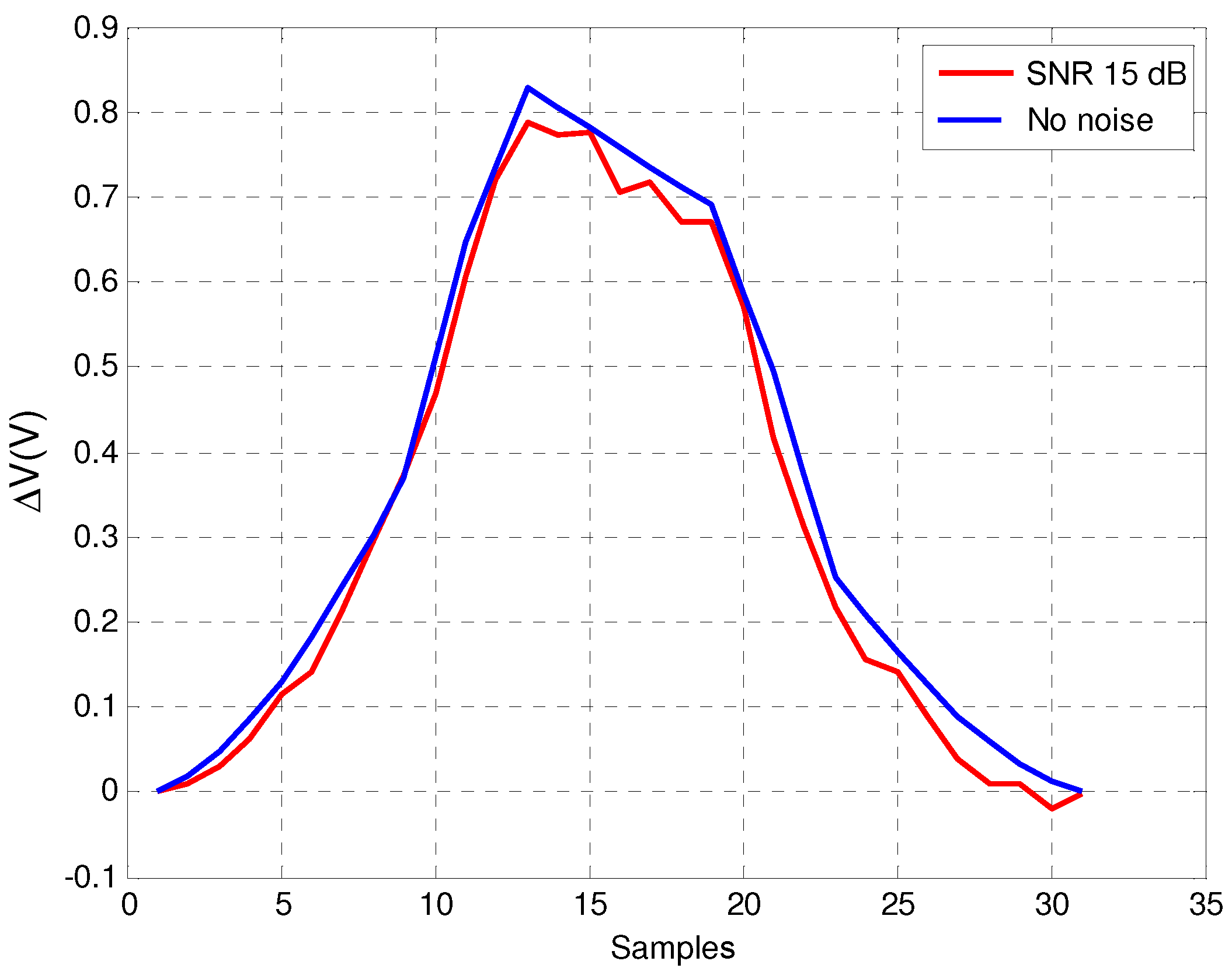
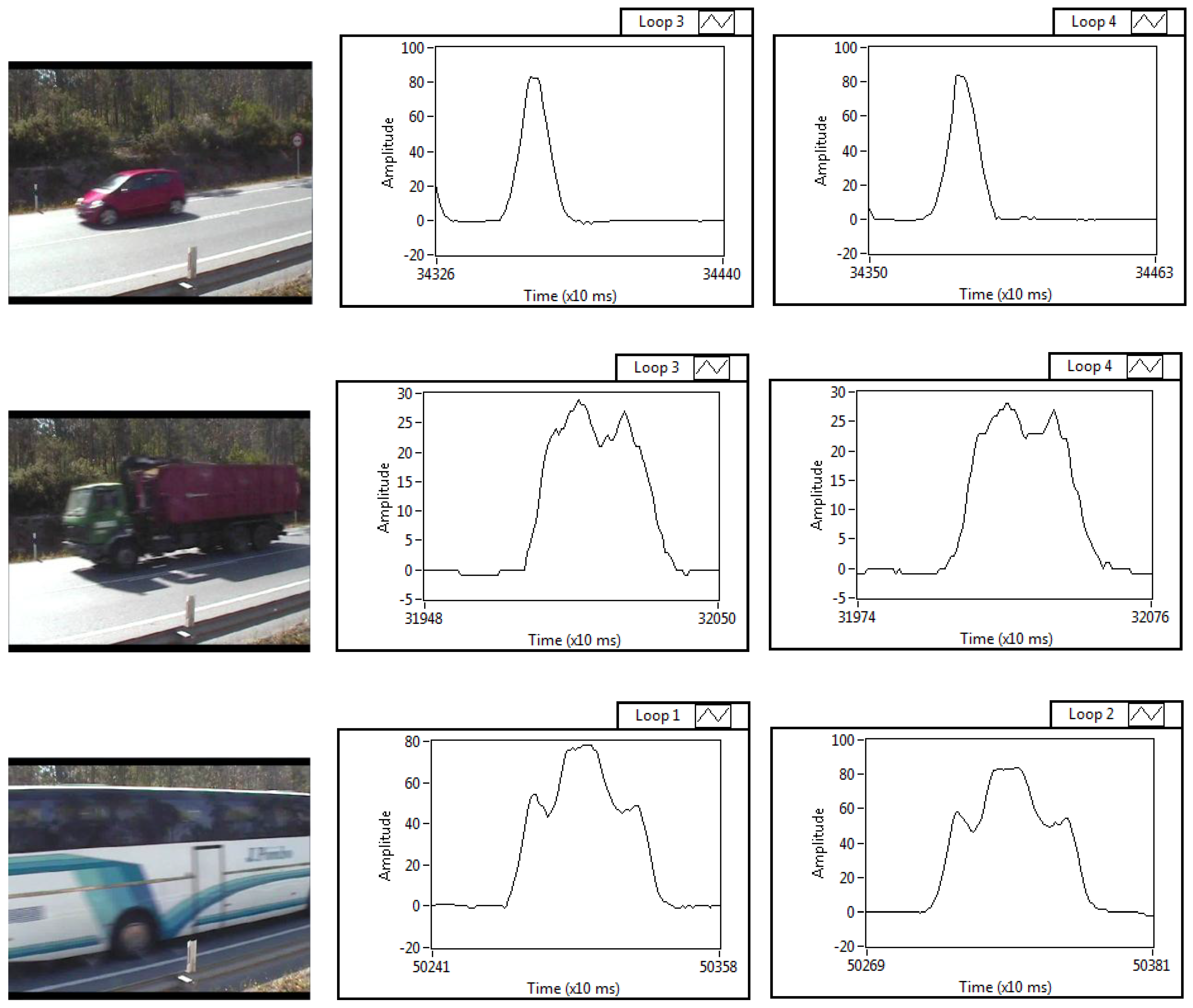
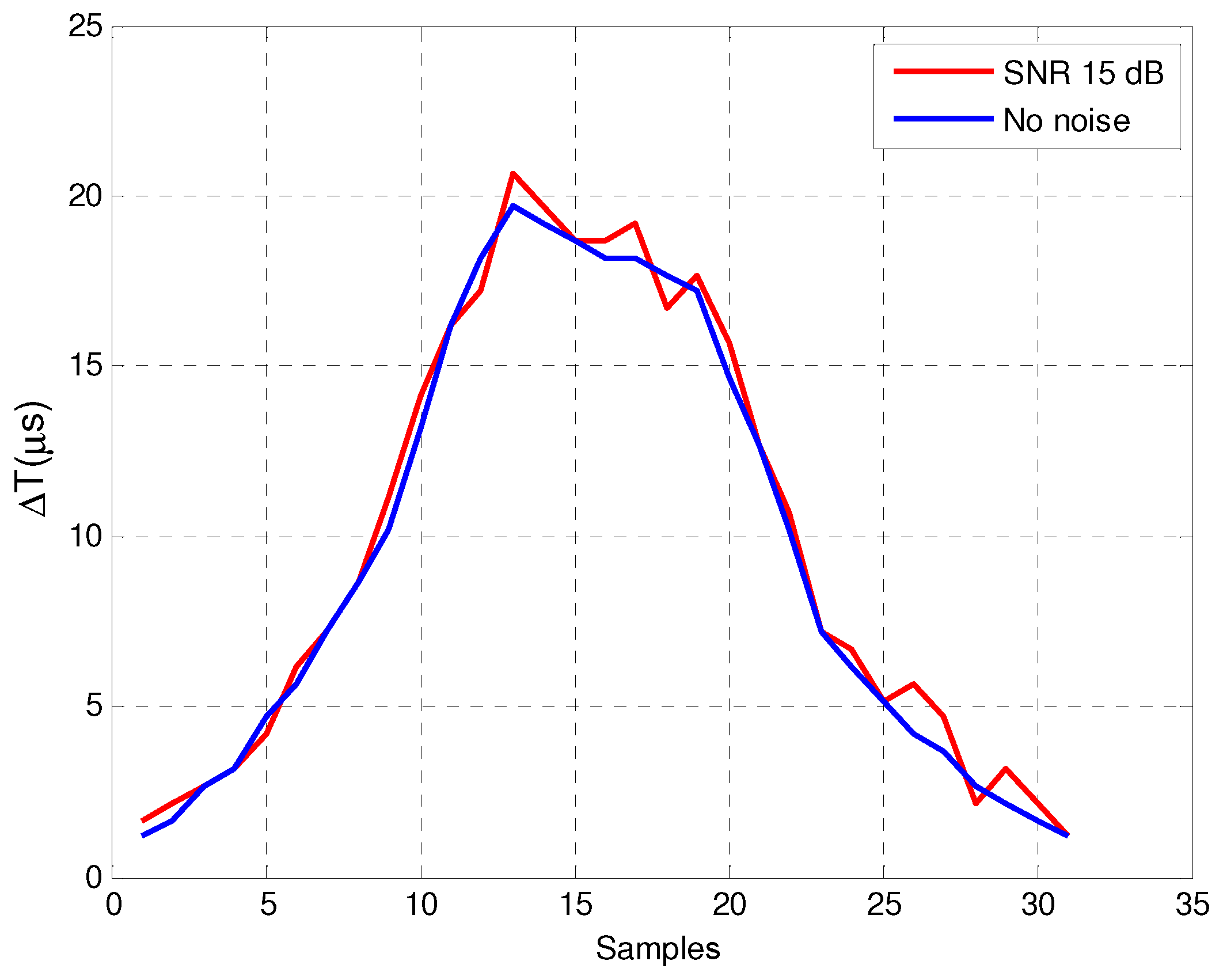
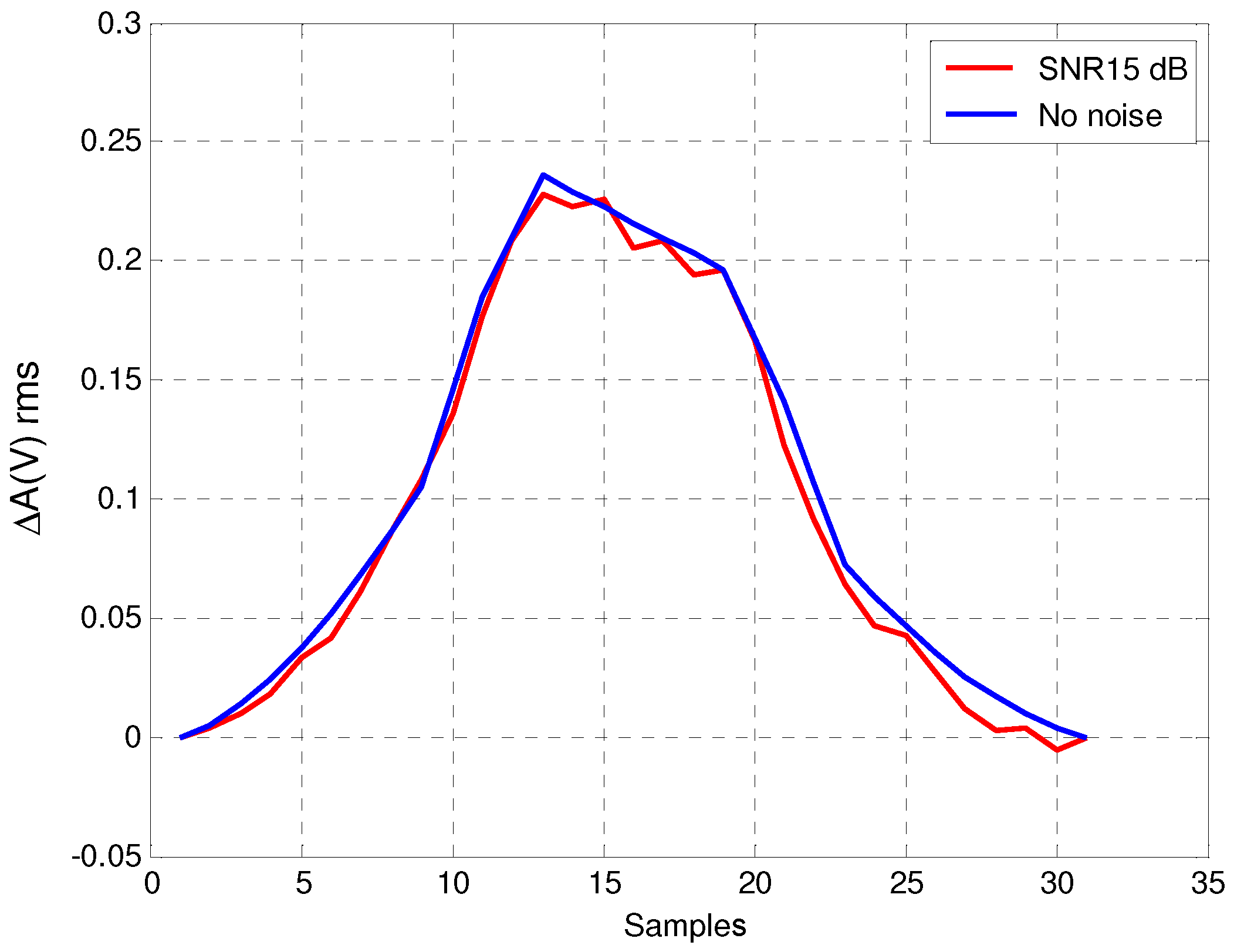
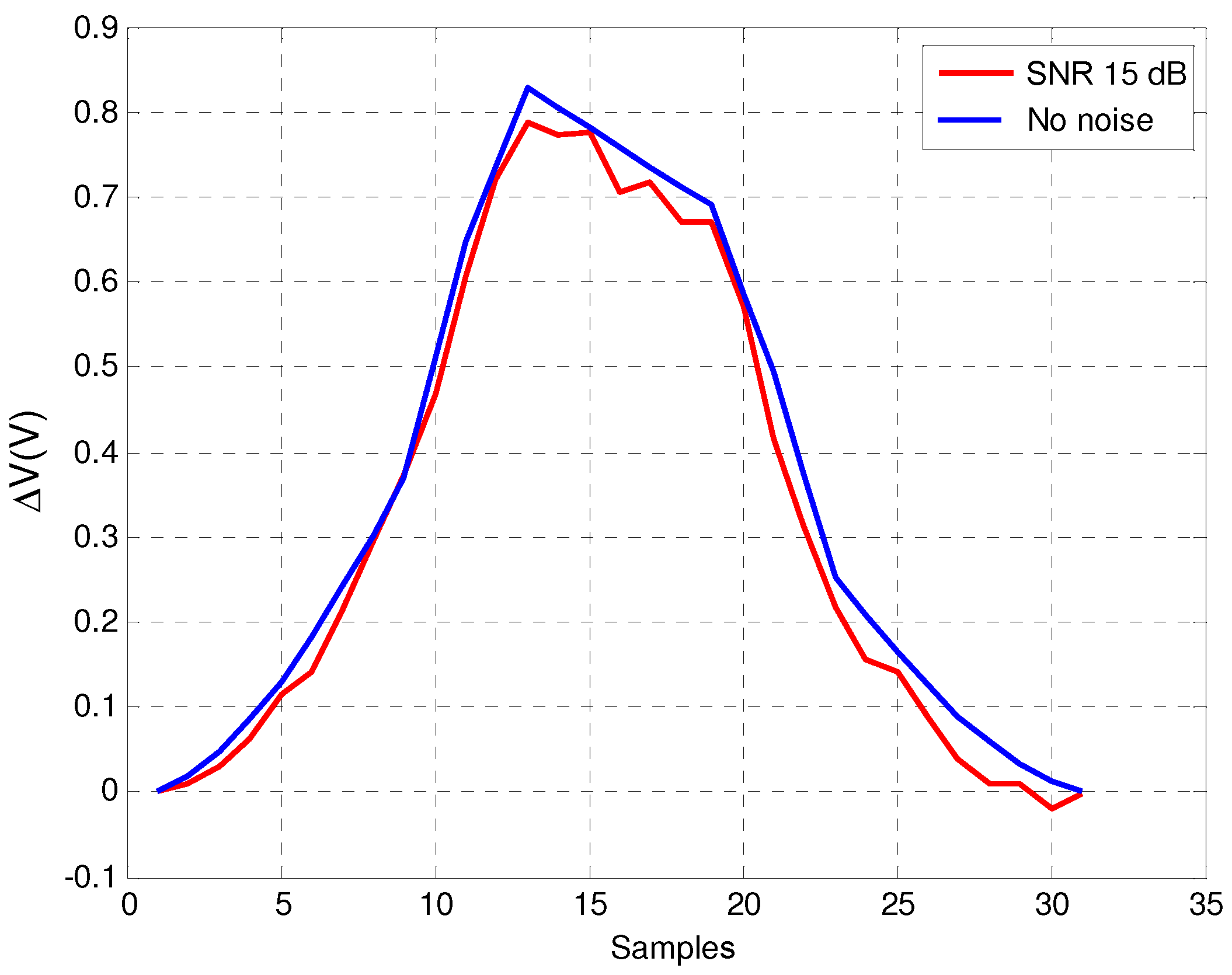
6.1. Effect of Noise on Vehicle Inductive Signatures
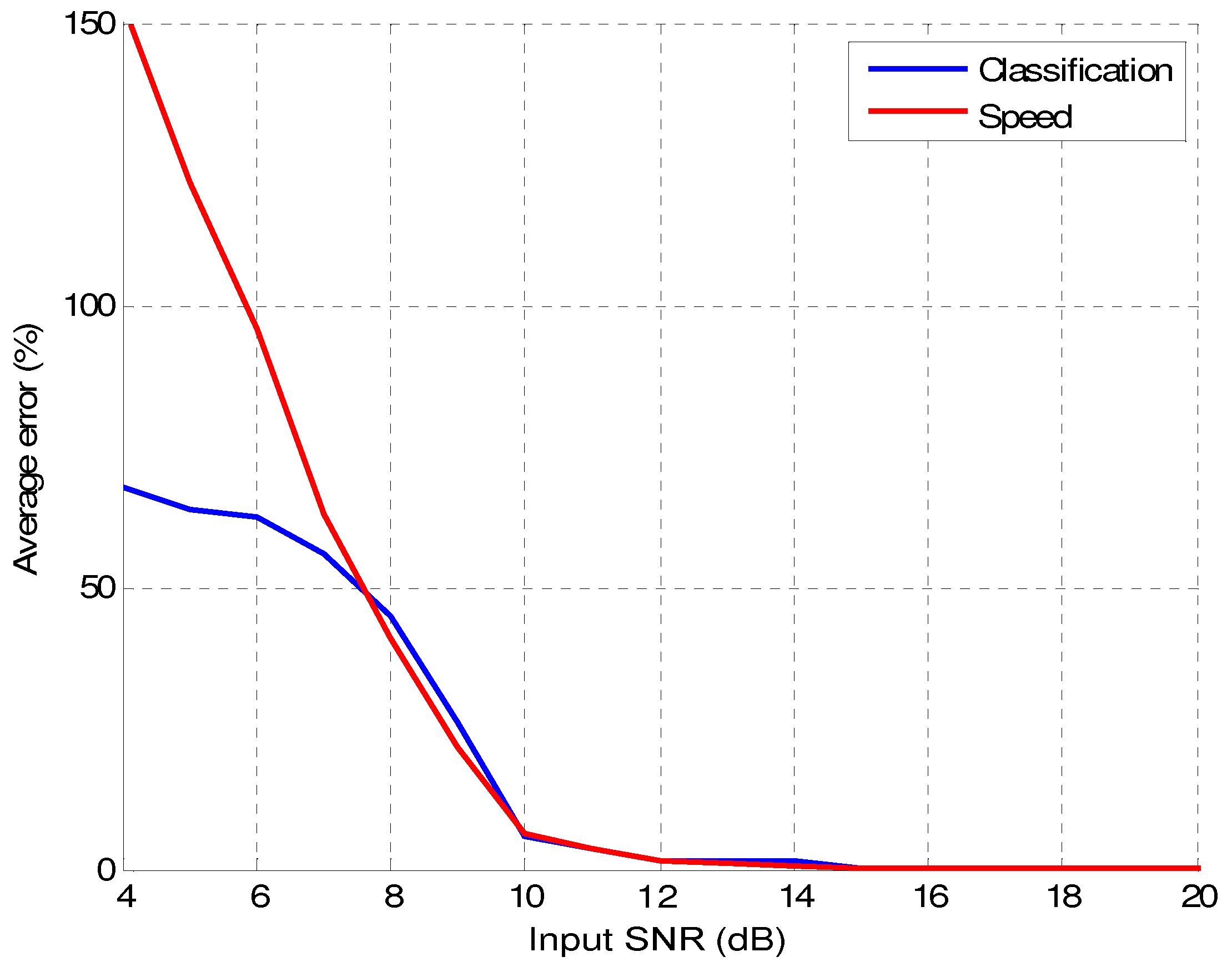
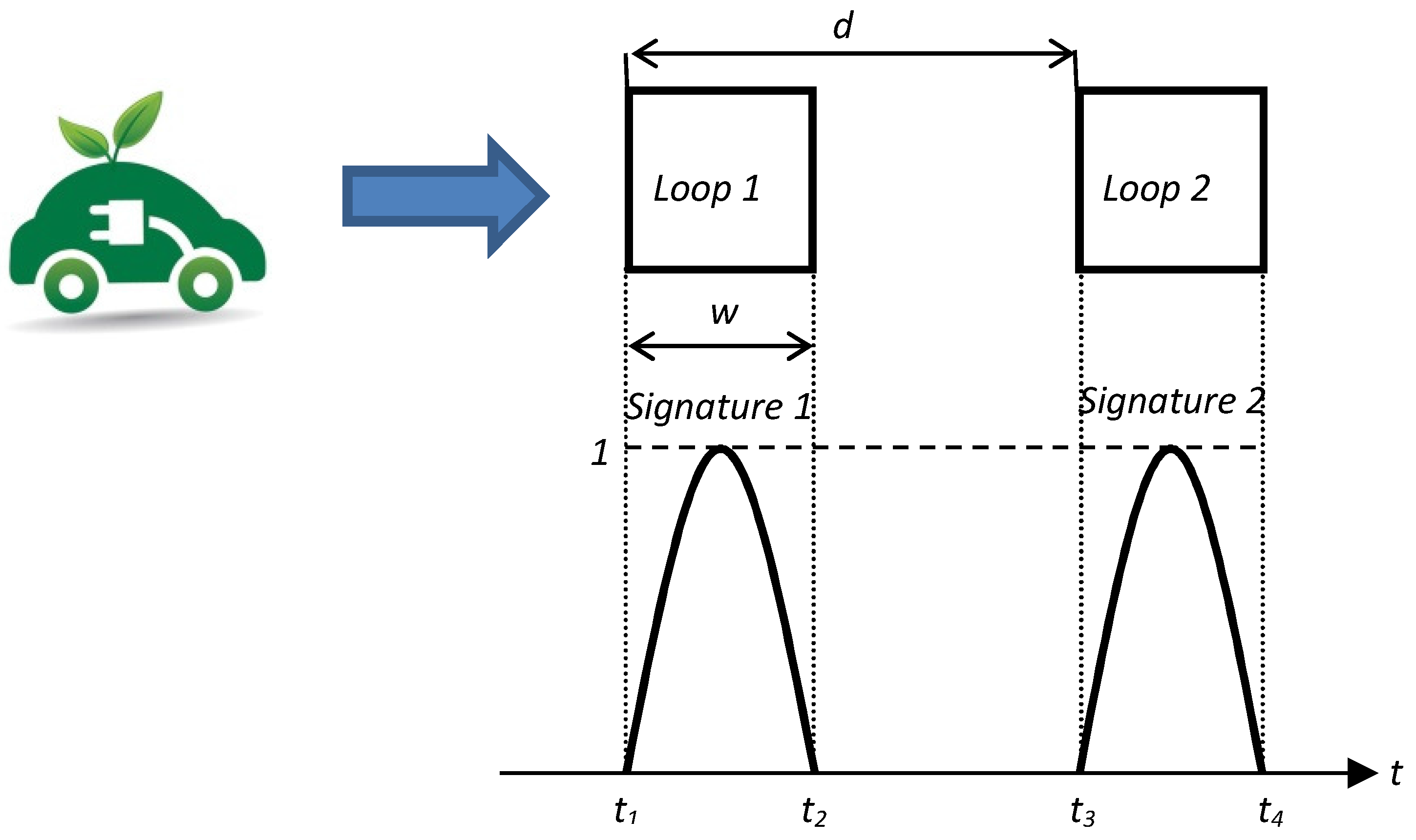
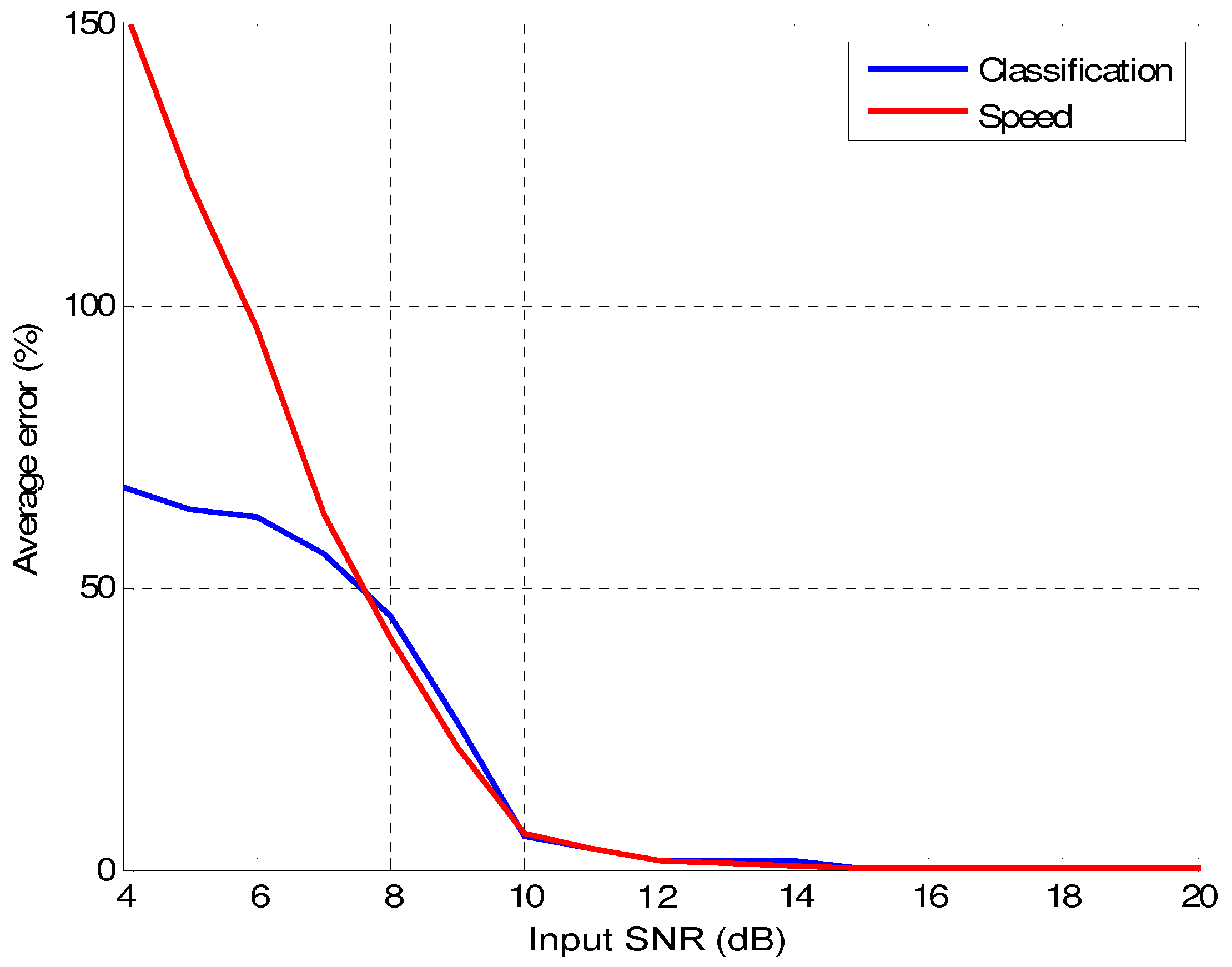
6.2. Effect of Noise on Speed Estimation and Vehicle Classification
- : input time instant of the normalized vehicle signature 1;
- : output time instant of the normalized vehicle signature 1;
- : input time instant of the normalized vehicle signature 2;
- : output time instant of the normalized vehicle signature 2.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Klein, L.; Gibson, D.; Mills, M. Traffic Detector Handbook, 3rd ed.; FHWA-HRT-06-108; Federal Highway Administration, Turner-Fairbank Highway Research Center: McLean, VA, USA, 2006; Volume 1. [Google Scholar]
- FHWA. Measurement of Highway-Related Noise. Available online: http://www.fhwa.dot.gov/environment/noise/measurement/mhrn03.cfm (accessed on 6 July 2011).
- FHWA. A Summary of Vehicle Detection and Surveillance Technologies use in Intelligent Transportation Systems. Available online: https://www.fhwa.dot.gov/policyinformation/pubs/vdstits2007/05.cfm (accessed on 7 November 2014).
- Gajda, J.; Sroka, R.; Stencel, M.; Wajda, A.; Zeglen, T. A vehicle classification based on inductive loop detectors. In Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference, Budapest, Hungary, 21–23 May 2001; Volume 1, pp. 460–464.
- Jeng, S.T.; Chu, L.; Hernandez, S. Wavelet-k Nearest Neighbor Vehicle Classification Approach with Inductive Loop Signatures. Transp. Res. Rec. J. Transp. Res. Board 2013, 2380, 72–80. [Google Scholar] [CrossRef]
- Jeng, S.T.; Ritchie, S. Real-Time Vehicle Classification Using Inductive Loop Signature Data. Transp. Res. Rec. J. Transp. Res. Board 2008, 2086, 8–22. [Google Scholar] [CrossRef]
- Ki, Y.; Bai, D. Vehicle Classification Model for Loop Detectors Using Neural Networks. Transp. Res. Rec. J. Transp. Res. Board 2005, 1917, 164–172. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, Y.; Wei, H. Artificial Neural Network Method for Length-Based Vehicle Classification Using Single-Loop Outputs. Transp. Res. Rec. J. Transp. Res. Board 2006, 1945, 100–108. [Google Scholar] [CrossRef]
- Ndoye, M.; Totten, V.; Carter, B.; Bullock, D.; Krogmeier, J. Vehicle Detector Signature Processing and Vehicle Reidentification for Travel Time Estimation. In Proceedings of the Transportation Research Board 87th Annual Meeting, Washington, DC, USA, 13–17 January 2008.
- Oh, C.; Tok, A.; Ritchie, S. Real-time freeway level of service using inductive-signature-based vehicle reidentification system. IEEE Trans. Intell. Transp. Syst. 2005, 6, 138–146. [Google Scholar] [CrossRef]
- Sun, C.; Ritchie, S.G.; Tsai, K.; Jayakrishnan, R. Use of vehicle signature analysis and lexicographic optimization for vehicle re-identification on freeways. Transp. Res. 1999, 7C, 167–185. [Google Scholar]
- Tawfik, A.Y.; Abdulhai, B.; Peng, A.; Tabib, S.M. Using Decision Trees to Improve the Accuracy of Vehicle Signature Reidentification. Transp. Res. Rec. J. Transp. Res. Board 2004, 1886, 24–33. [Google Scholar] [CrossRef]
- Wang, Y.; Nihan, N.L. Freeway Traffic Speed Estimation with Single-Loop Outputs. Transp. Res. Rec. J. Transp. Res. Board 2000, 1727, 120–126. [Google Scholar] [CrossRef]
- Sun, C.; Ritchie, S. Individual Vehicle Speed Estimation Using Single Loop Inductive Waveforms. J. Transp. Eng. 1999, 125, 531–538. [Google Scholar] [CrossRef]
- Mills, M. Inductive loop detector analysis. In Proceedings of the 31st IEEE Vehicular Technology Conference, Washington, DC, USA, 6–8 April 1981; Volume 31, pp. 401–411.
- Mills, M. Inductive loop system equivalent circuit model. In Proceedings of the IEEE 39th Vehicular Technology Conference, San Francisco, CA, USA, 1–3 May 1989; Volume 2, pp. 689–700.
- Cheevarunothai, P.; Wang, Y.; Nihan, N. Identification and Correction of Dual-Loop Sensitivity Problems. Transp. Res. Rec. J. Transp. Res. Board 2006, 1945, 73–81. [Google Scholar] [CrossRef]
- Day, C.; Brennan, T.; Harding, M.; Premachandra, H.; Jacobs, A.; Bullock, D.; Krogmeier, J.; Sturdevant, J. Three-Dimensional Mapping of Inductive Loop Detector Sensitivity with Field Measurement. Transp. Res. Rec. J. Transp. Res. Board 2009, 2128, 35–47. [Google Scholar] [CrossRef]
- Martin, M. Microprocessor Controlled Loop Detector System. U.S. Patent 4680717, 14 July 1987. Available online: http://www.google.co.in/patents/US4680717 (accessed on 14 July 1987). [Google Scholar]
- Minsen, C.; Ngarmnil, J.; Rongviriyapanich, T. Embedded adaptive algorithm for multi-lanes-traffic inductive loop detecting system. In Proceedings of the 2005 2nd International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Pattaya, Thailand, 12–13 May 2005; Volume 1, pp. 359–362.
- Sheik Mohammed Ali, S.; George, B.; Vanajakshi, L.; Venkatraman, J. A Multiple Inductive Loop Vehicle Detection System for Heterogeneous and Lane-Less Traffic. IEEE Trans. Instrum. Meas. 2012, 61, 1353–1360. [Google Scholar] [CrossRef]
- Gajda, J.; Stencel, M. A Highly Selective Vehicle Classification Utilizing Dual-Loop Inductive Detector. Metrol. Meas. Syst. 2014, 21, 473–484. [Google Scholar] [CrossRef]
- Hilliard, S.; Roberts, M.; Yerem, G. Inductive Signature Measurement System. U.S. Patent 6911829, 28 June 2005. Available online: http://www.google.tl/patents/US6911829 (accessed on 28 June 2005). [Google Scholar]
- Sheik Mohammed Ali, S.; George, B.; Vanajakshi, L. An Efficient Multiple-Loop Sensor Configuration Applicable for Undisciplined Traffic. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1151–1161. [Google Scholar] [CrossRef]
- Malik, N.; García, M.; Ordas, M.; Viejo, C. Circuitos Electrónicos: Análisis, Diseño y Simulación; Pearson Educación: Mexico City, Mexico, 1996. [Google Scholar]
- Blake, R. Sistemas Electrónicos de Comunicaciones; International Thomson: Boston, MA, USA, 2004. [Google Scholar]
- Travis, J.; Kring, J. LabVIEW for Everyone: Graphical Programming Made Easy and Fun; Prentice Hall: Englewood Cliffs, NJ, USA, 2006. [Google Scholar]
- Blume, P.A. The LabVIEW Style Book; Prentice Hall: Englewood Cliffs, NJ, USA, 2007. [Google Scholar]
- Ki, Y.K.; Baik, D.K. Model for accurate speed measurement using double-loop detectors. IEEE Trans. Veh. Technol. 2006, 55, 1094–1101. [Google Scholar] [CrossRef]
- Gordon, R.L.; Tighe, W. Traffic Control Systems Handbook; Report No.: FHWA-HOP-06-006; Federal Highway Administration: Washington, DC, USA, 2005.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Classification | Small | Medium | Large |
|---|---|---|---|
| Type of vehicles | Car | Large car, van | Truck, bus, trailer |
| Number of vehicles (manually pre-classified with a video camera) | 680 | 61 | 168 |
| Decision rule |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lamas-Seco, J.J.; Castro, P.M.; Dapena, A.; Vazquez-Araujo, F.J. SiDIVS: Simple Detection of Inductive Vehicle Signatures with a Multiplex Resonant Sensor. Sensors 2016, 16, 1309. https://doi.org/10.3390/s16081309
Lamas-Seco JJ, Castro PM, Dapena A, Vazquez-Araujo FJ. SiDIVS: Simple Detection of Inductive Vehicle Signatures with a Multiplex Resonant Sensor. Sensors. 2016; 16(8):1309. https://doi.org/10.3390/s16081309
Chicago/Turabian StyleLamas-Seco, José J., Paula M. Castro, Adriana Dapena, and Francisco J. Vazquez-Araujo. 2016. "SiDIVS: Simple Detection of Inductive Vehicle Signatures with a Multiplex Resonant Sensor" Sensors 16, no. 8: 1309. https://doi.org/10.3390/s16081309