
Through-Wall Multiple Targets Vital Signs Tracking Based on VMD Algorithm



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory of UWB Radar Vital Signs Measurement
3. Multiple Targets Vital Signs Tracking Algorithm
3.1. Determine Traversed Range Bins
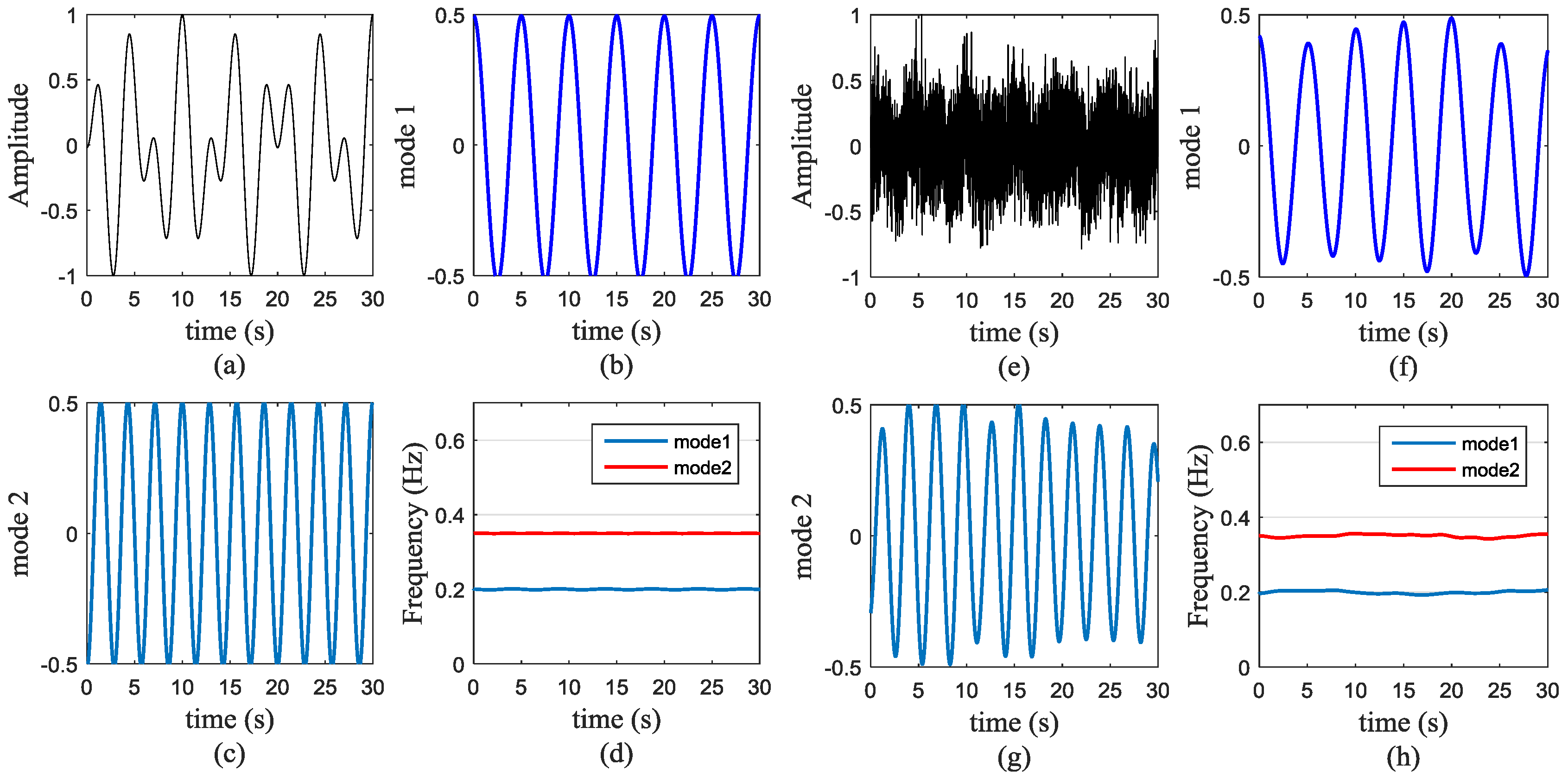
3.2. Respiration Signals Separation with the VMD Algorithm
3.3. Calculation of Instantaneous Frequency
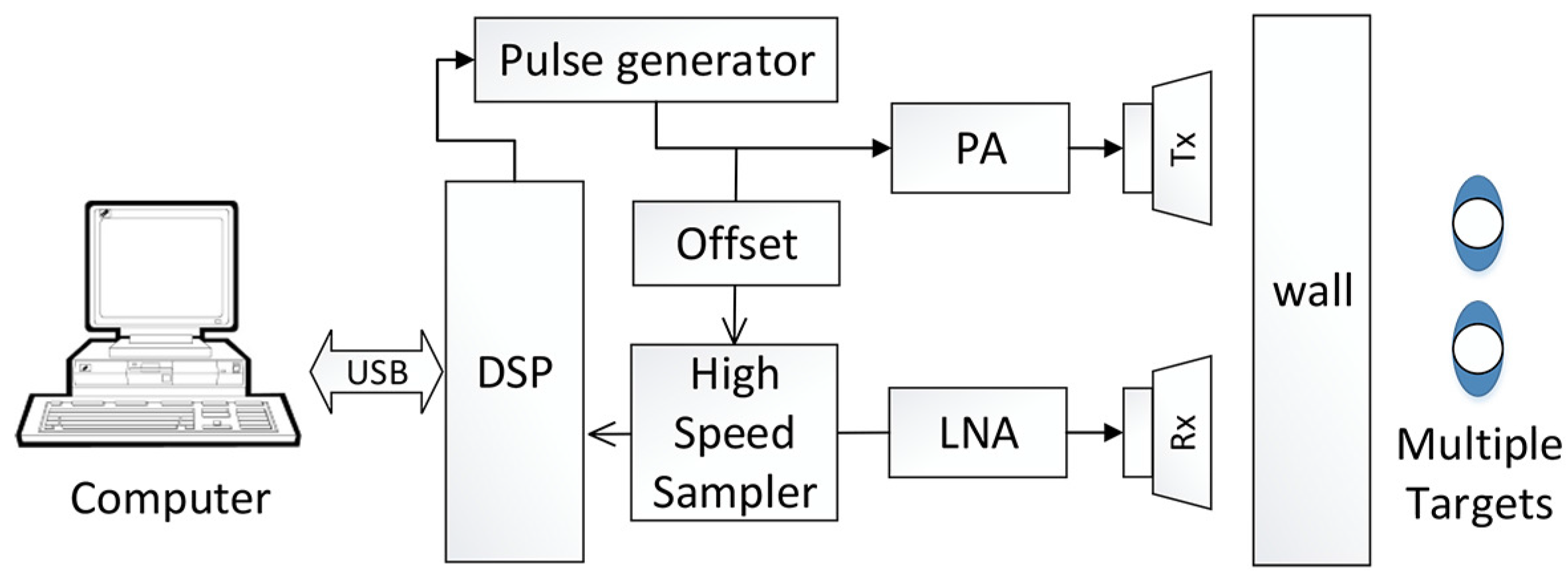
4. UWB Radar System and Experimental results
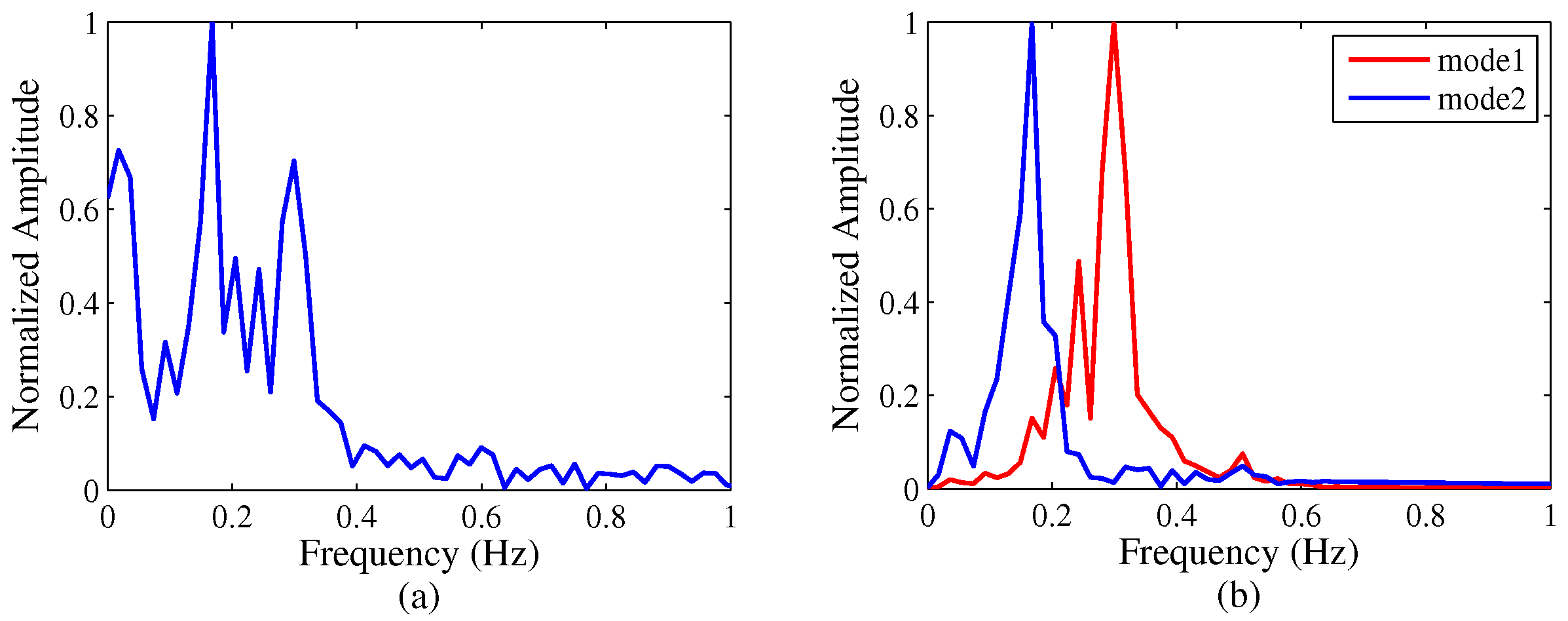
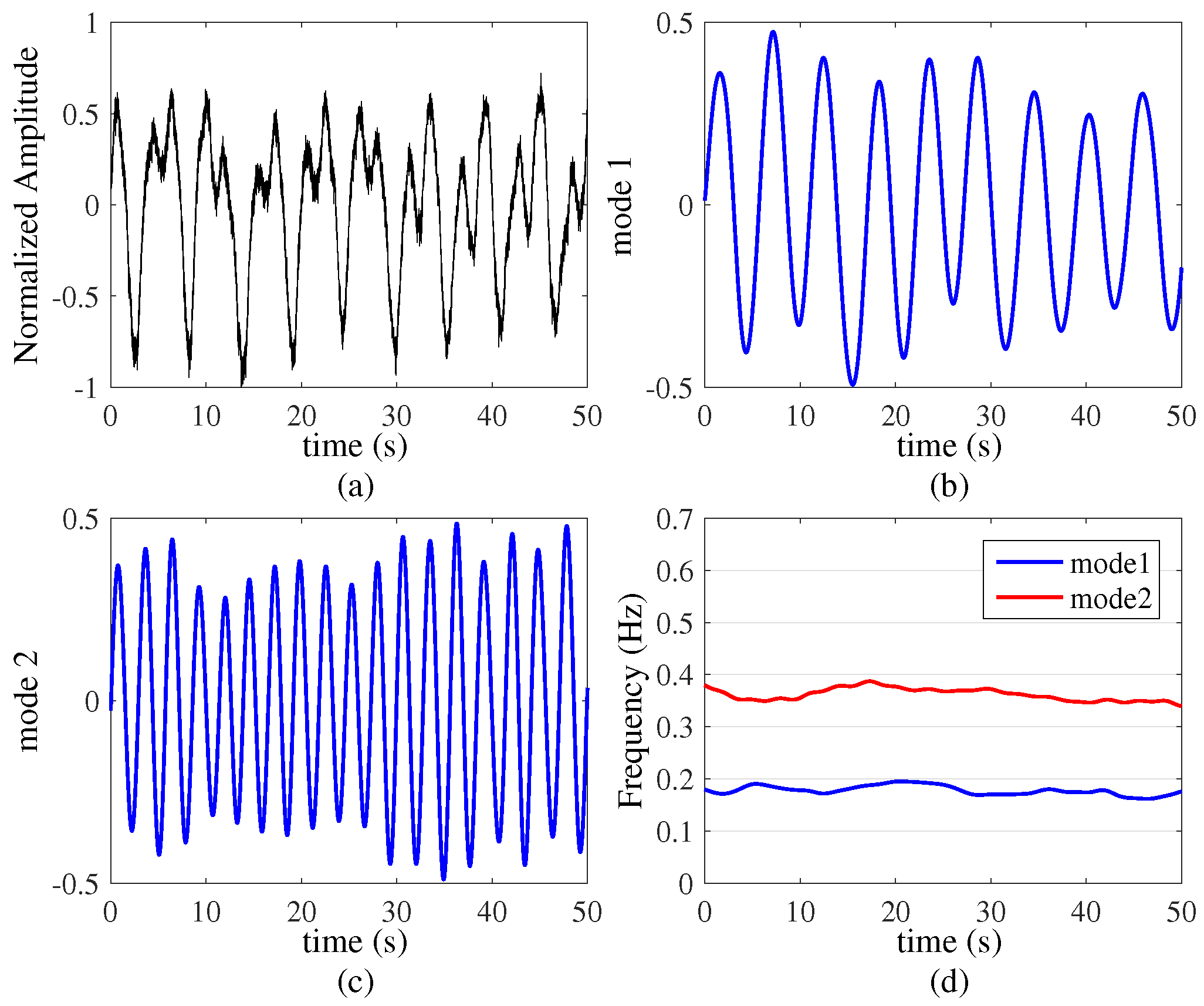
4.1. Two Targets with Constant Respiration Rates
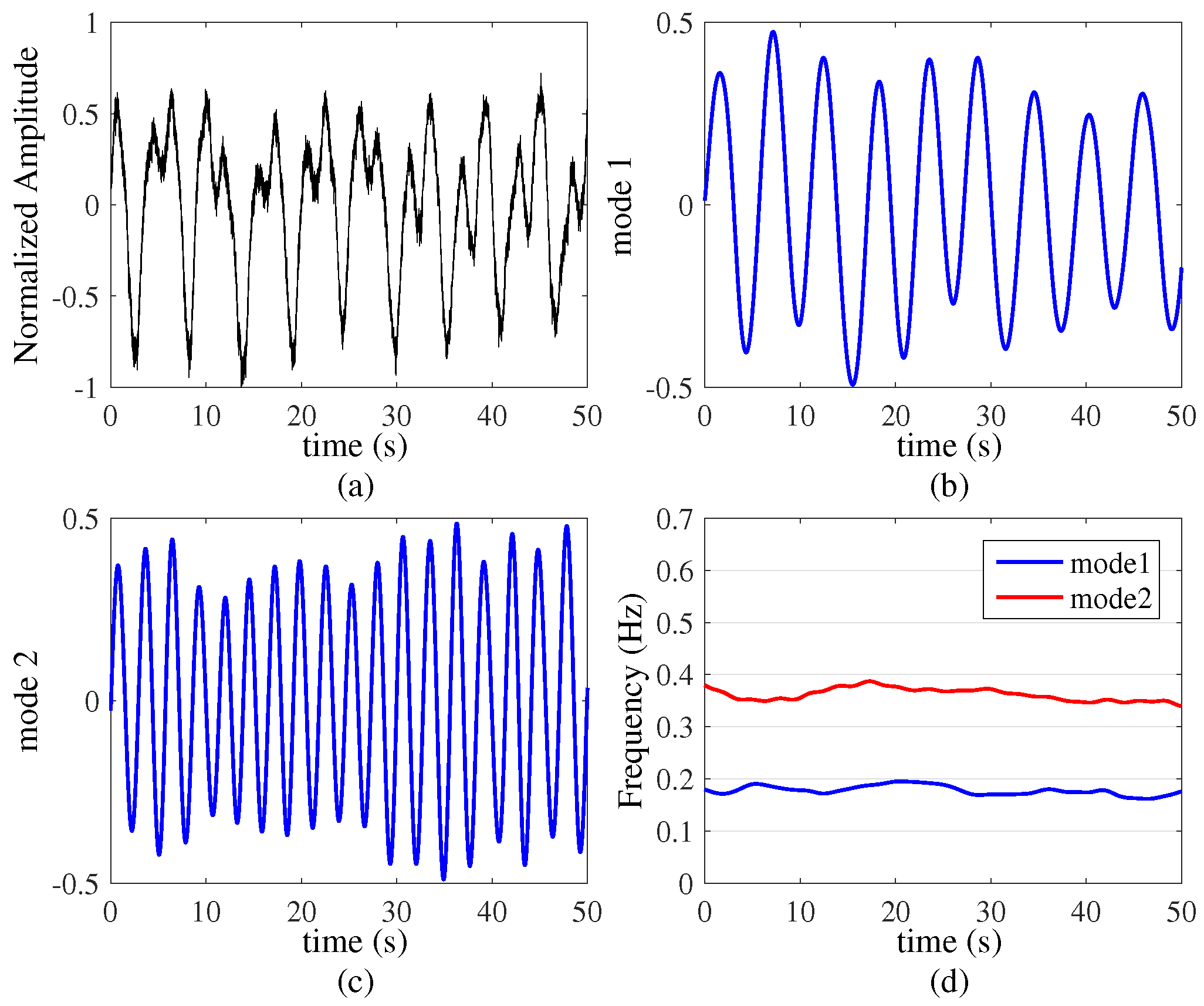
4.2. Two Targets with Piecewise-Constant Respiration Rates
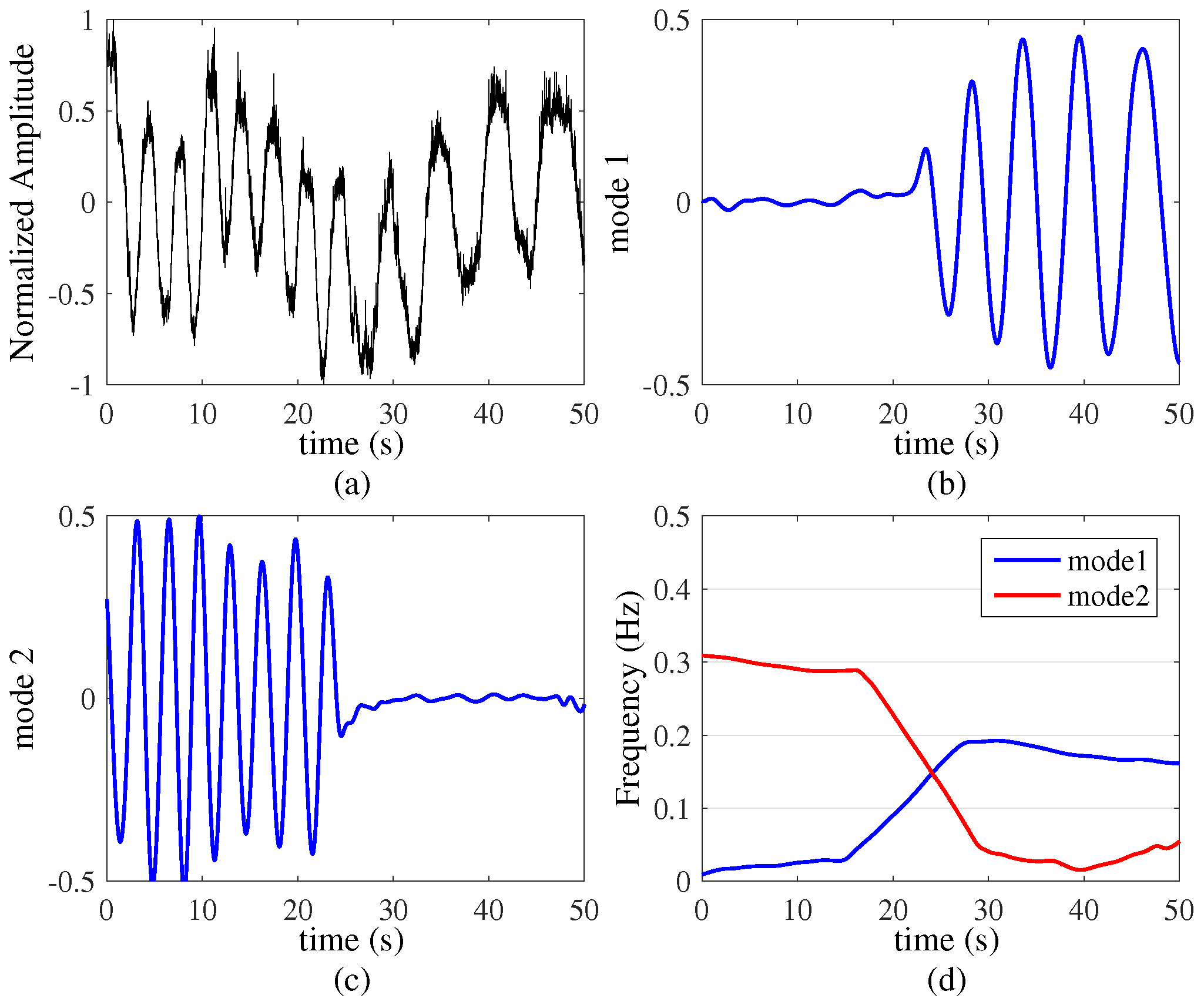
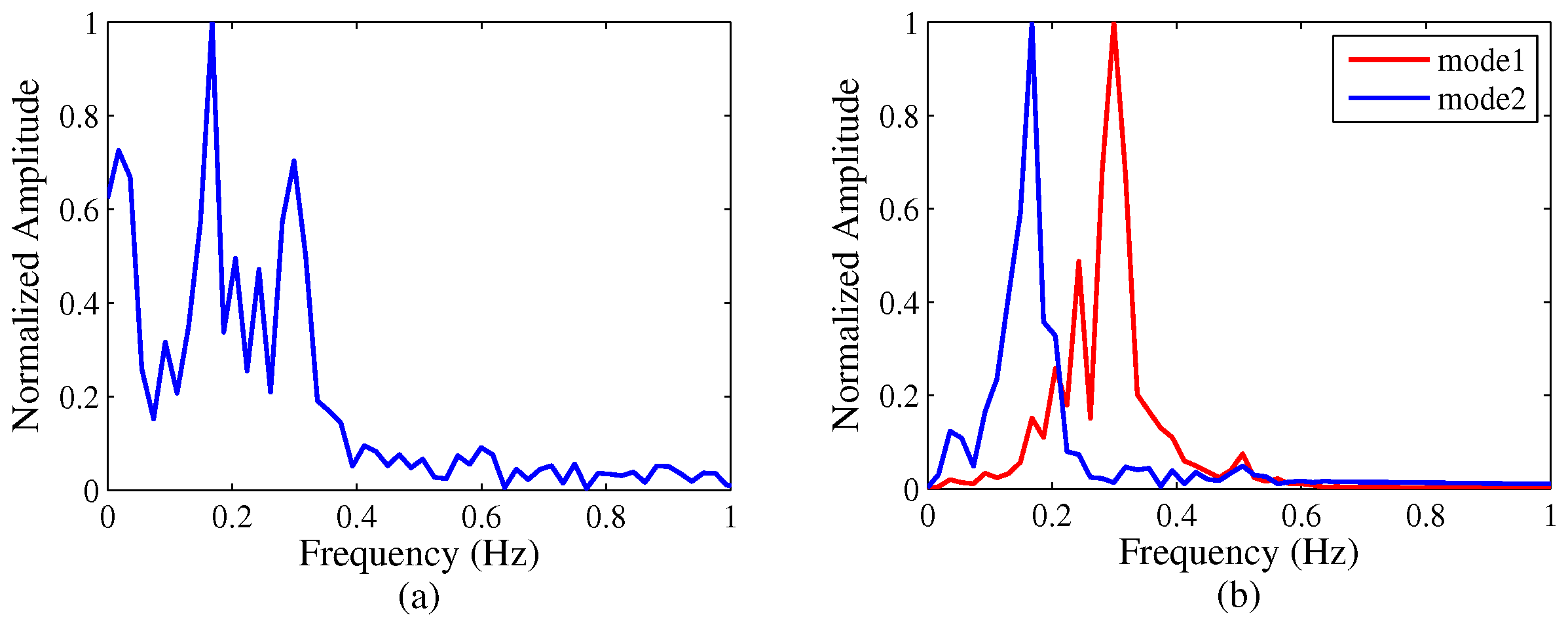
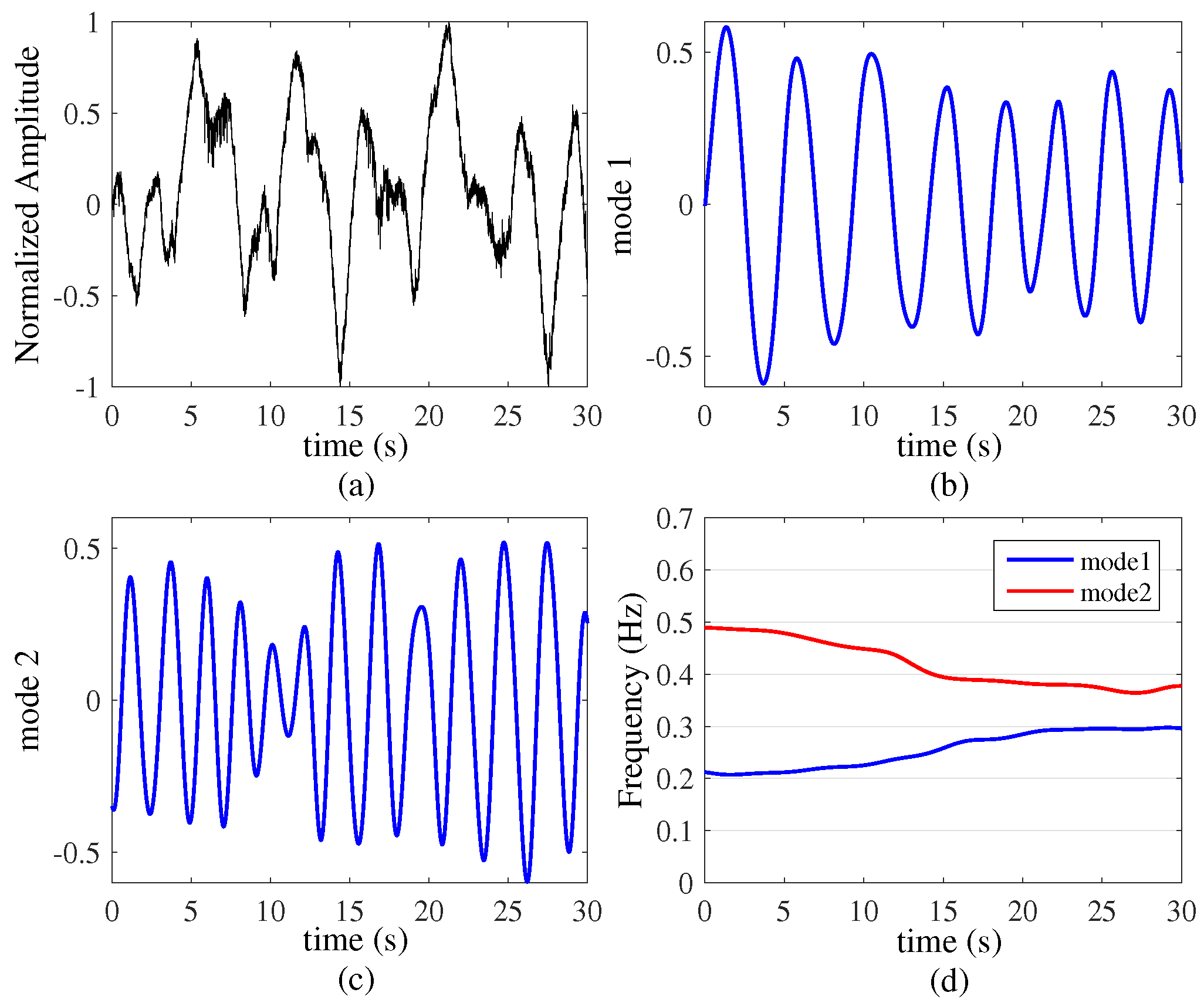
4.3. Two Targets with Time-Varying Respiration Rates
4.4. Three Targets with Constant Respiration Rates
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gennarelli, G.; Vivone, G.; Braca, P.; Soldovieri, F.; Amin, M.G. Multiple extended target tracking for through-wall radars. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6482–6494. [Google Scholar] [CrossRef]
- Lubecke, V.M.; Boric-Lubecke, O.; Host-Madsen, A.; Fathy, A.E. Through-the-wall radar life detection and monitoring. In Proceedings of the 2007 IEEE/MTT-S International Microwave Symposium, Honolulu, HI, USA, 3–8 June 2007; pp. 769–772.
- Setlur, P.; Alli, G.; Nuzzo, L. Multipath exploitation in through-wall radar imaging via point spread functions. IEEE Trans. Image Process. 2013, 22, 4571–4586. [Google Scholar] [CrossRef] [PubMed]
- Dehmollaian, M.; Sarabandi, K. Refocusing through building walls using synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1589–1599. [Google Scholar] [CrossRef]
- Li, G.; Burkholder, R.J. Hybrid matching pursuit for distributed through-wall radar imaging. IEEE Trans. Antennas Propag. 2015, 63, 1701–1711. [Google Scholar] [CrossRef]
- Browne, K.E.; Burkholder, R.J. Nonlinear optimization of radar images from a through-wall sensing system via the Lagrange multiplier method. IEEE Geosci. Remote Sens. Lett. 2012, 9, 803–807. [Google Scholar] [CrossRef]
- Yoon, Y.-S.; Amin, M.G. High-resolution through-the-wall radar imaging using beamspace MUSIC. IEEE Trans. Antennas Propag. 2008, 56, 1763–1774. [Google Scholar] [CrossRef]
- Browne, K.E.; Burkholder, R.J.; Volakis, J.L. Fast optimization of through-wall radar images via the method of Lagrange multipliers. IEEE Trans. Antennas Propag. 2013, 61, 320–328. [Google Scholar] [CrossRef]
- Nguyen, V.; Pyun, J. Location detection and tracking of moving targets by a 2D IR-UWB radar system. Sensors 2015, 15, 6740–6762. [Google Scholar] [CrossRef] [PubMed]
- Yarovoy, A.G.; Ligthart, L.P.; Matuzas, J.; Levitas, B. UWB radar for human being detection. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 10–14. [Google Scholar] [CrossRef]
- Zhuge, X.; Yarovoy, A.G. A sparse aperture MIMO-SAR-Based UWB imaging system for concealed weapon detection. IEEE Trans. Geosci. Remote Sens. 2011, 49, 509–518. [Google Scholar] [CrossRef]
- Yang, Y.; Fathy, A.E. Development and implementation of a real-time see-through-wall radar system based on FPGA. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1270–1280. [Google Scholar] [CrossRef]
- Charvat, G.L.; Kempel, L.C.; Rothwell, E.J.; Coleman, C.M.; Mokole, E.L. A through-dielectric radar imaging system. IEEE Trans. Antennas Propag. 2010, 58, 2594–2603. [Google Scholar] [CrossRef]
- Fioranelli, F.; Salous, S.; Raimundo, X. Frequency-modulated interrupted continuous wave as wall removal technique in through-the-wall imaging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6272–6283. [Google Scholar] [CrossRef]
- Kocur, D.; Svecova, M.; Rovnakova, J. Through-the-wall localization of a moving target by two independent Ultra Wideband (UWB) radar systems. Sensors 2013, 13, 11969–11997. [Google Scholar] [CrossRef] [PubMed]
- Huang, Q.; Qu, L.; Wu, B.; Fang, G. UWB Through-wall imaging based on compressive sensing. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1408–1415. [Google Scholar] [CrossRef]
- Wang, F.; Horng, T.; Peng, K.; Jau, J.; Li, J.; Chen, C. Seeing through walls with a self-injection-locked radar to detect hidden people. In Proceedings of the 2012 IEEE MTT-S International Microwave Symposium Digest (MTT), Montreal, QC, Canada, 17–22 June 2012; pp. 1–3.
- Zhang, Z.; Zhang, X.; Lv, H.; Lu, G.; Jing, X.; Wang, J. Human-target detection and surrounding structure estimation under a simulated rubble via UWB radar. IEEE Geosci. Remote Sens. Lett. 2013, 10, 328–331. [Google Scholar] [CrossRef]
- Gu, C.; Li, C. Assessment of human respiration patterns via noncontact sensing using doppler multi-radar system. Sensors 2015, 15, 6383–6398. [Google Scholar] [CrossRef] [PubMed]
- Lazaro, A.; Girbau, D.; Villarino, R. Techniques for clutter suppression in the presence of body movements during the detection of respiratory activity through UWB radars. Sensors 2014, 14, 2595–2618. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Chen, F.; Jin, J.; Lv, H.; Li, S.; Lu, G.; Wang, J. A method for remotely sensing vital signs of human subjects outdoors. Sensors 2015, 15, 14830–14844. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Koo, Y.S.; Wang, H.; Wang, Y.; Liu, Q.; Fathy, A.E. Noncontact multiple heartbeats detection and subject localization using UWB impulse doppler radar. IEEE Microw. Wirel. Compon. Lett. 2015, 25, 690–692. [Google Scholar] [CrossRef]
- Yan, J.; Zhao, H.; Li, Y.; Sun, L.; Hong, H.; Zhu, X. Through-the-wall human respiration detection using impulse ultra-wide-band radar. In Proceedings of the 2016 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Austin, TX, USA, 24–27 January 2016; pp. 94–96.
- Bugaev, A.S.; Chapursky, V.V.; Ivashov, S.I.; Razevig, V.V.; Sheyko, A.P.; Vasilyev, I.A. Through wall sensing of human breathing and heart beating by monochromatic radar. In Proceedings of the Tenth International Conference on Ground Penetrating Radar, GPR 2004, Delft, The Netherlands, 21–24 June 2004; pp. 291–294.
- Liu, L.; Liu, Z.; Barrowes, B.E. Through-wall bio-radiolocation with UWB impulse radar: Observation, simulation and signal extraction. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2011, 4, 791–798. [Google Scholar] [CrossRef]
- Li, W.; Jing, X.; Li, Z.; Wang, J. A new algorithm for through wall human respiration monioring using GPR. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 947–952.
- Wang, F.; Horng, T.; Peng, K.; Jau, J.; Li, J.; Chen, C. Detection of concealed individuals based on their vital signs by using a see-through-wall imaging system with a self-injection-locked radar. Microw. IEEE Trans. Theory Tech. 2013, 61, 696–704. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Q.; Fathy, A.E. CW and pulse-doppler radar processing based on FPGA for human sensing applications. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3097–3107. [Google Scholar] [CrossRef]
- Li, J.; Zeng, Z.; Sun, J.; Liu, F. Through-wall detection of human being’s movement by UWB radar. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1079–1083. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Hjortland, H.A.; Lande, T.S. CTBV integrated impulse radio design for biomedical applications. IEEE Trans. Biomed. Circuits Syst. 2009, 3, 79–88. [Google Scholar] [CrossRef] [PubMed]






© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Hong, H.; Zhao, H.; Li, Y.; Gu, C.; Zhu, X. Through-Wall Multiple Targets Vital Signs Tracking Based on VMD Algorithm. Sensors 2016, 16, 1293. https://doi.org/10.3390/s16081293
Yan J, Hong H, Zhao H, Li Y, Gu C, Zhu X. Through-Wall Multiple Targets Vital Signs Tracking Based on VMD Algorithm. Sensors. 2016; 16(8):1293. https://doi.org/10.3390/s16081293
Chicago/Turabian StyleYan, Jiaming, Hong Hong, Heng Zhao, Yusheng Li, Chen Gu, and Xiaohua Zhu. 2016. "Through-Wall Multiple Targets Vital Signs Tracking Based on VMD Algorithm" Sensors 16, no. 8: 1293. https://doi.org/10.3390/s16081293