
Enhanced Positioning Algorithm of ARPS for Improving Accuracy and Expanding Service Coverage


Abstract
:
1. Introduction
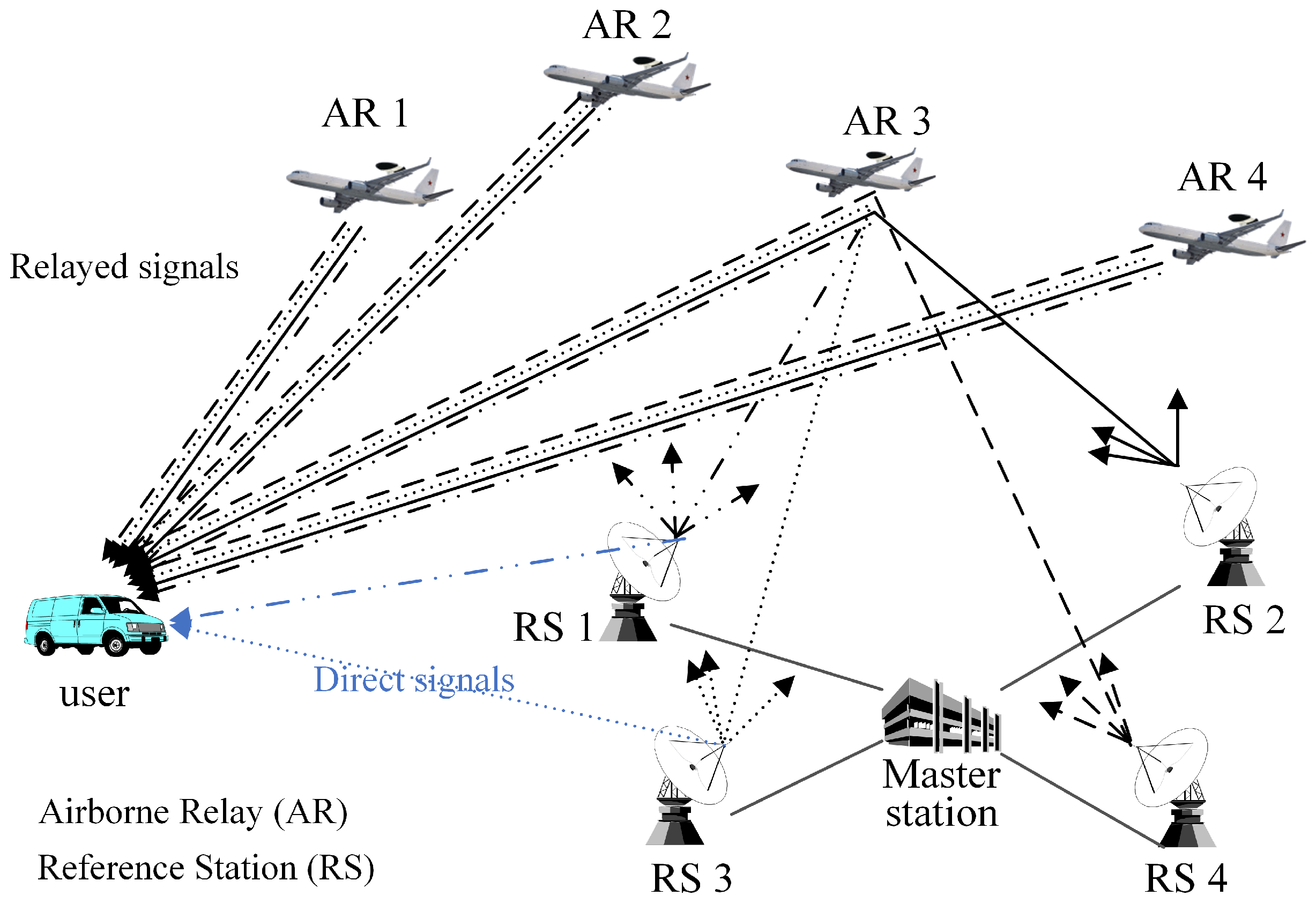
2. Airborne Relay-Based Regional Positioning System
3. Enhanced Positioning Algorithm for ARPS
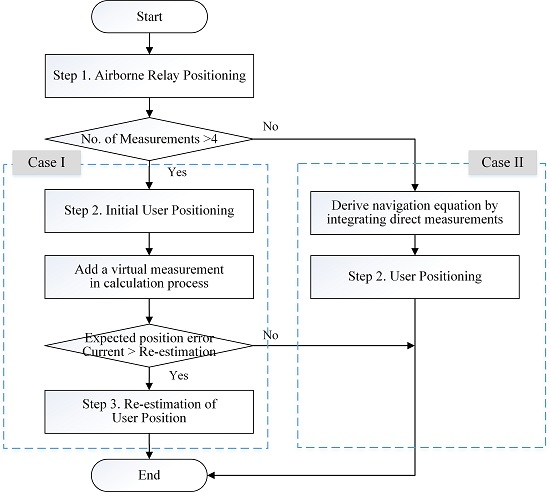
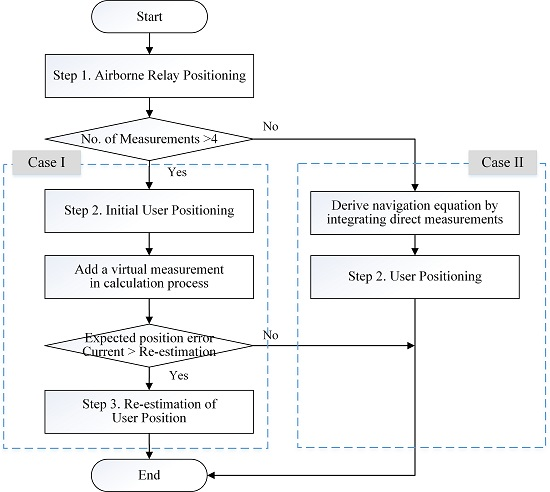
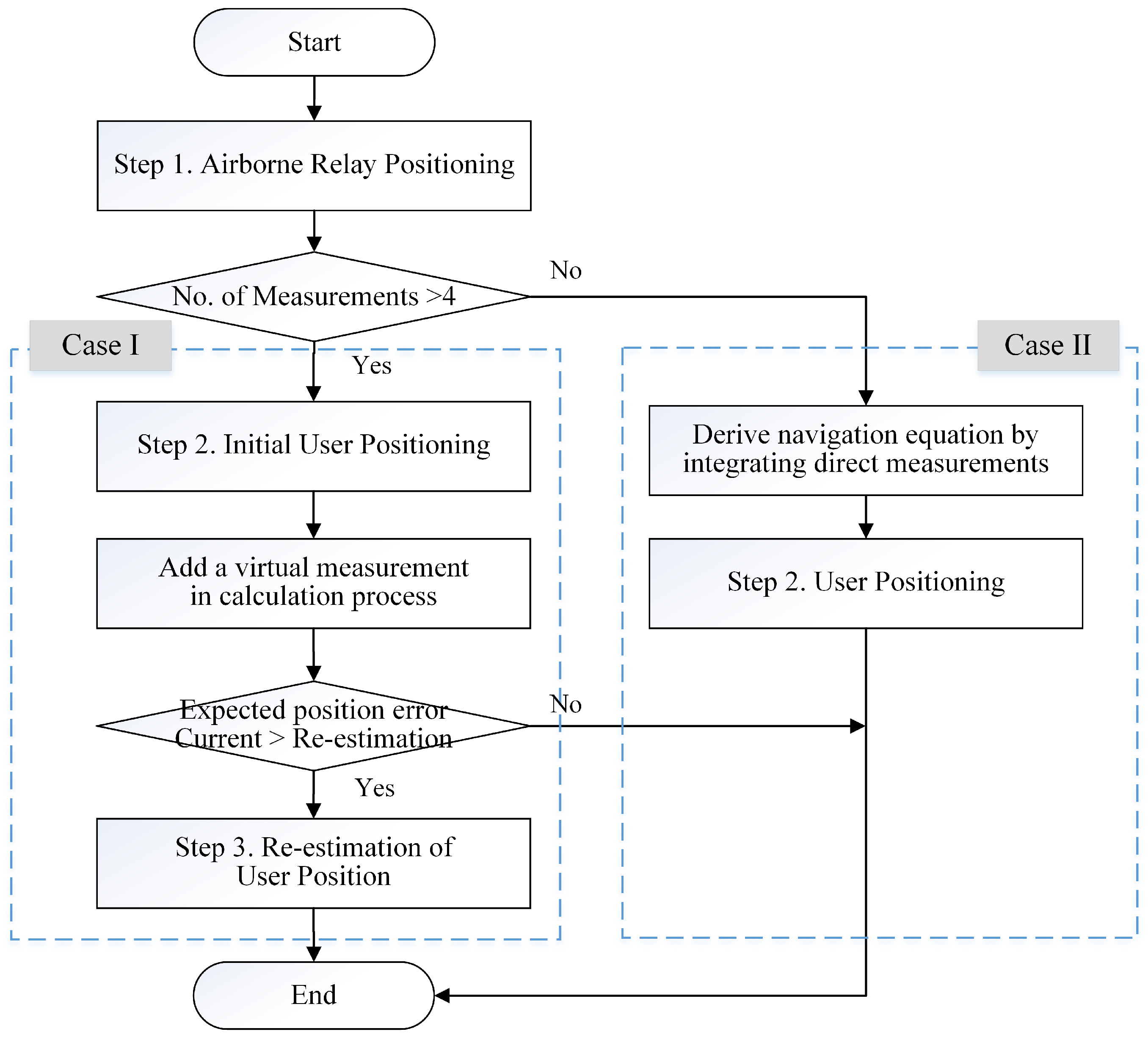
3.1. Procedures of the Enhanced Algorithm
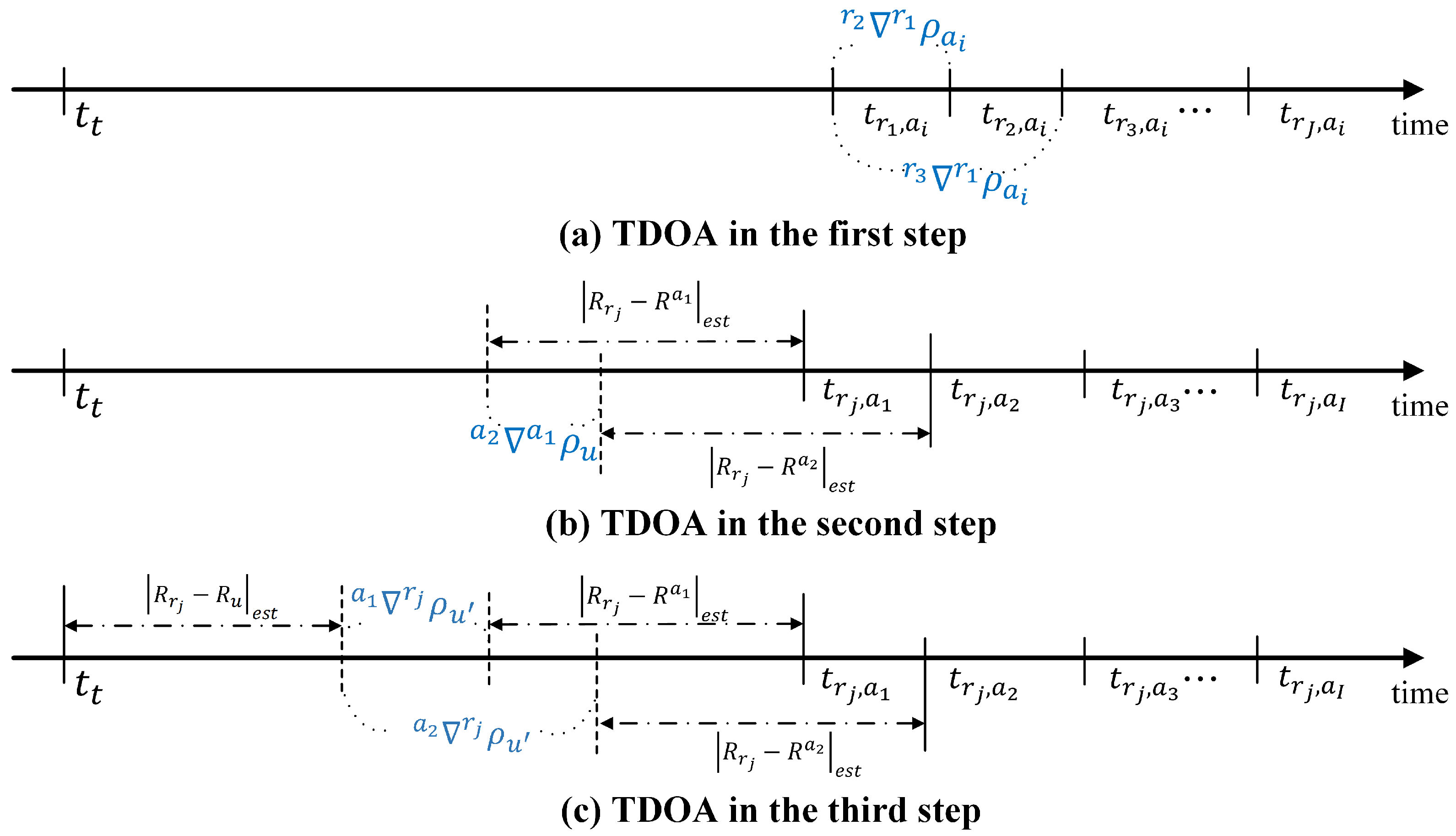
3.2. Mathematical Expression of Positioning Procedures
4. Simulation Results and Discussion
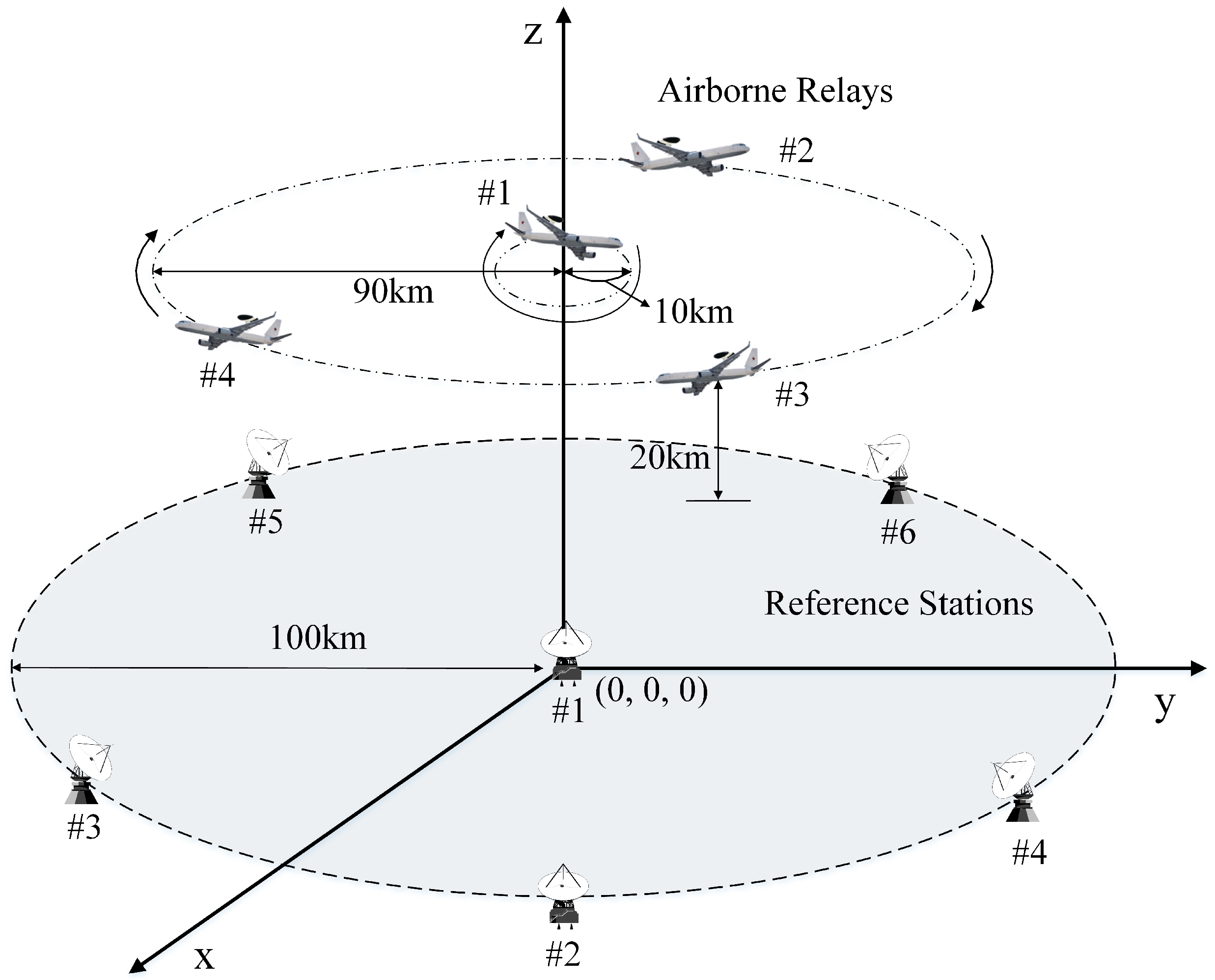
4.1. Simulation Assumptions and Construction
4.1.1. Simulation Assumptions
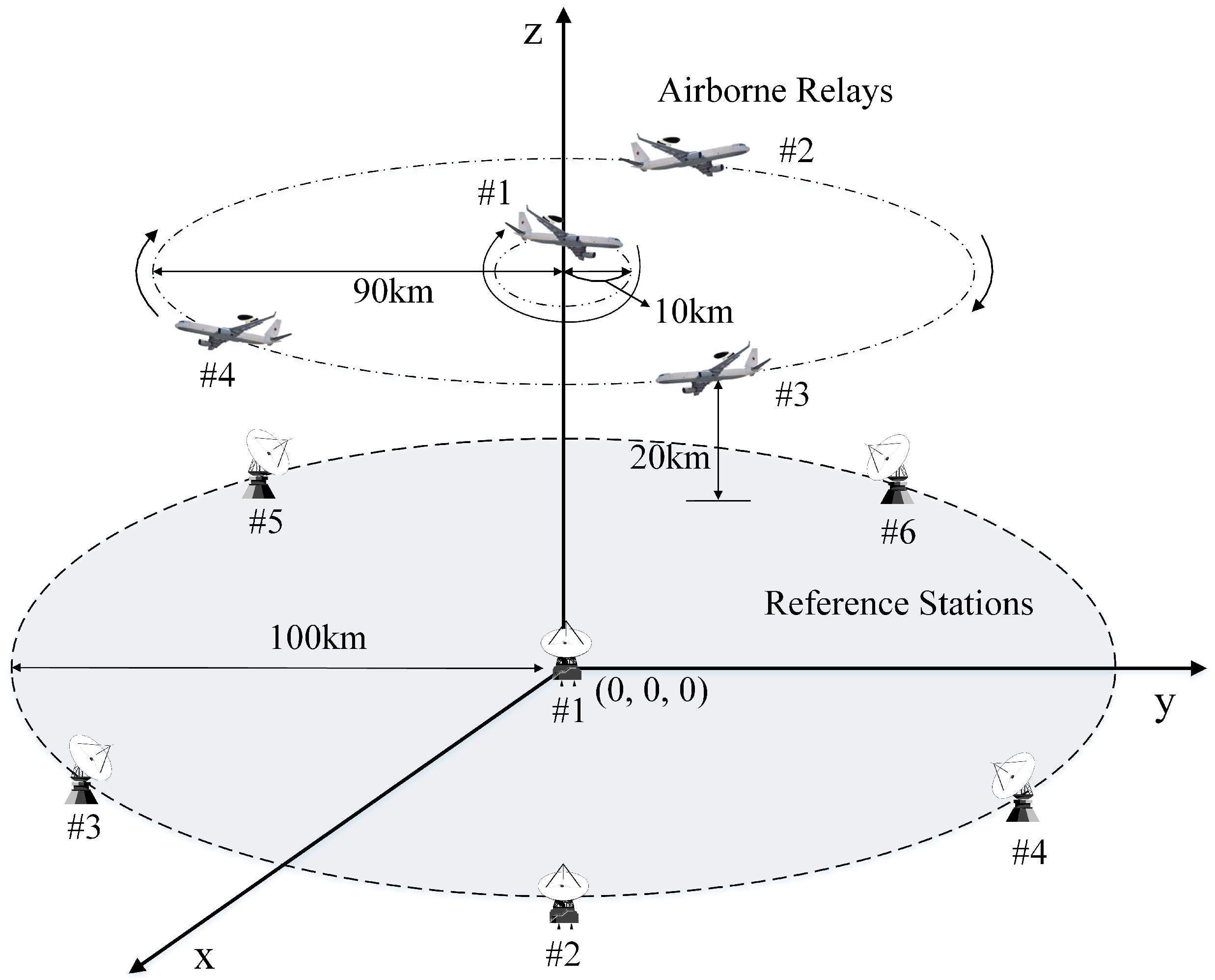
4.1.2. Simulation Model Construction
4.1.3. Measurement Errors
4.2. Simulation Results and Discussion
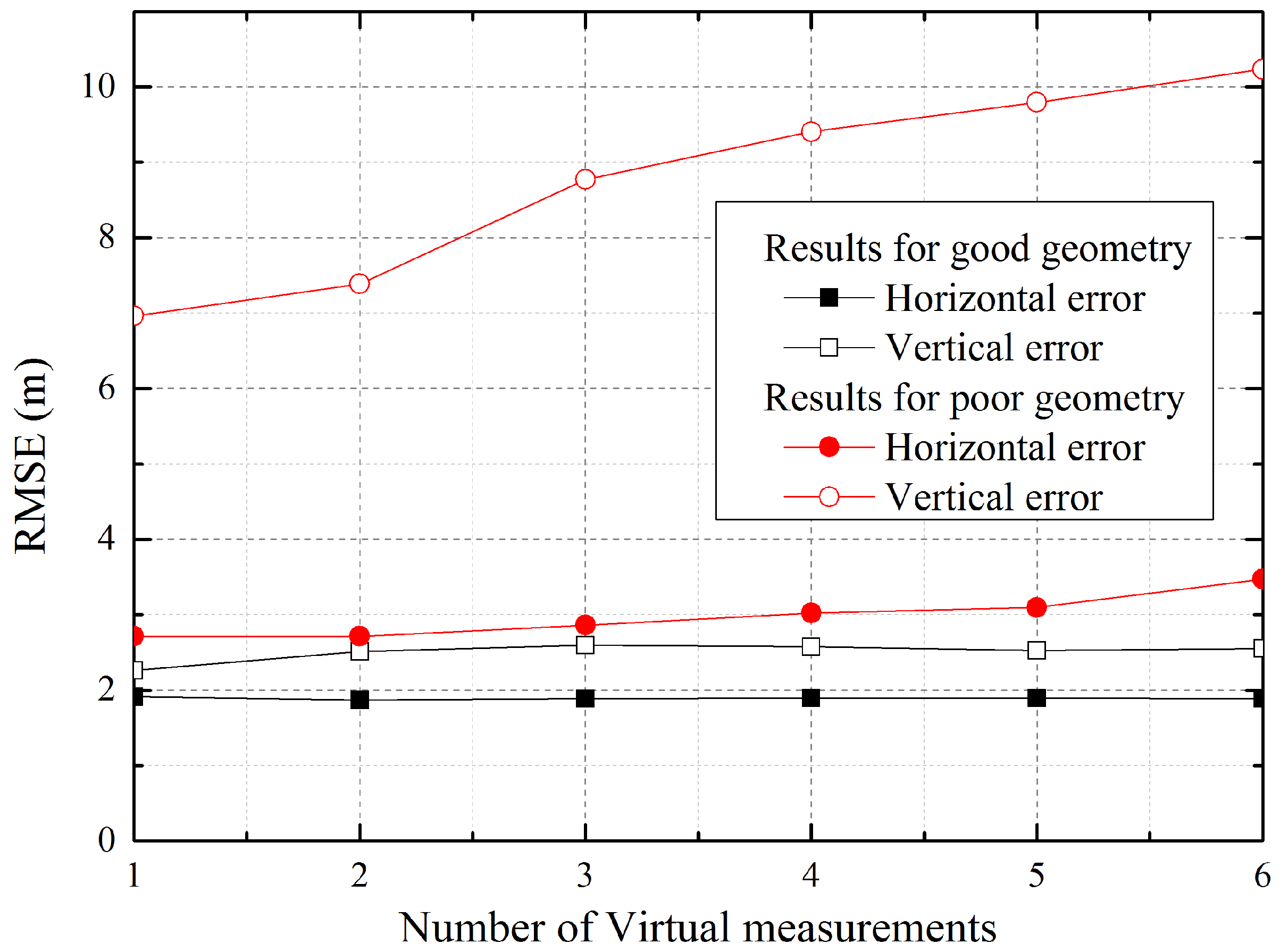
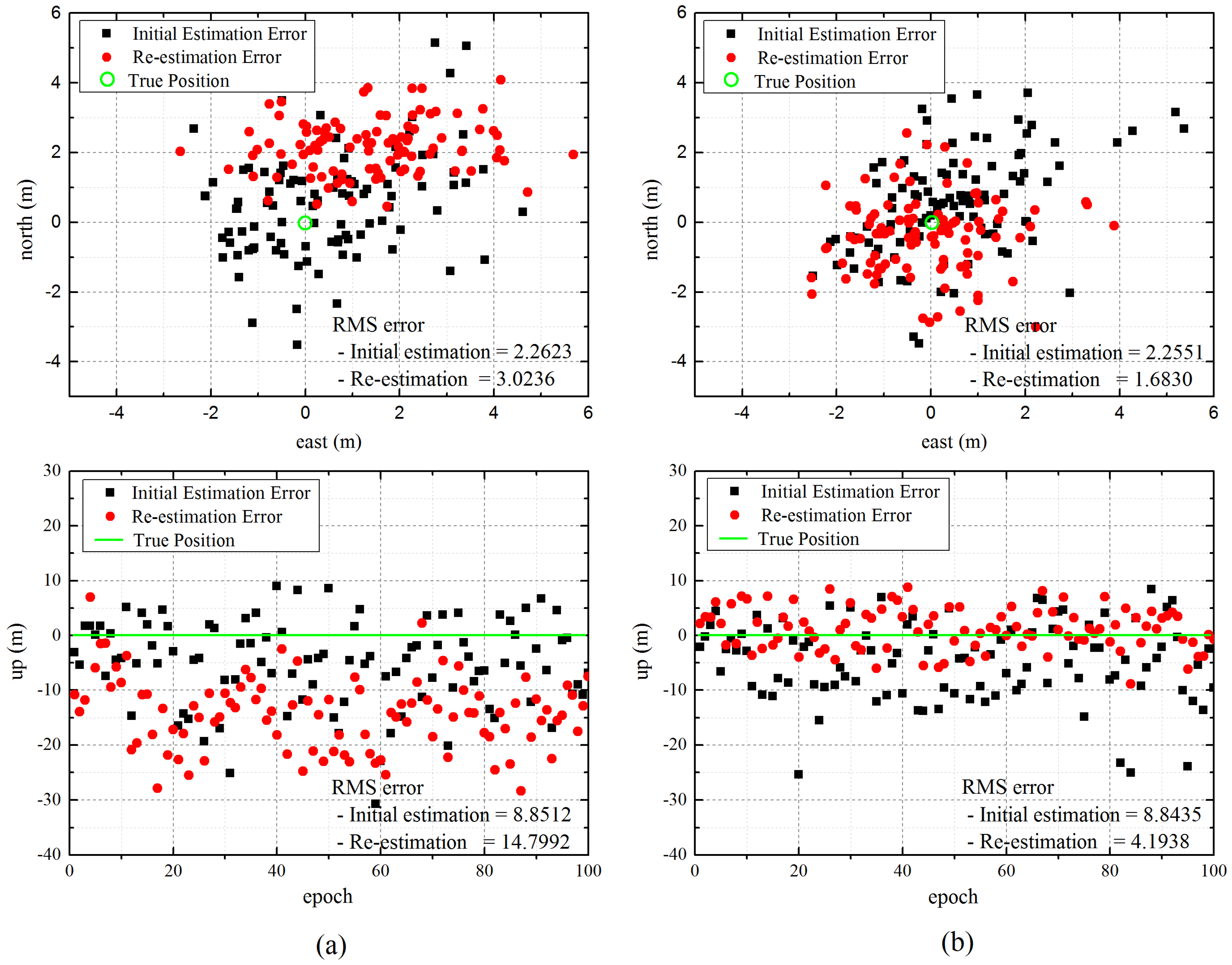
4.2.1. Influence of Measurement on Re-Estimation
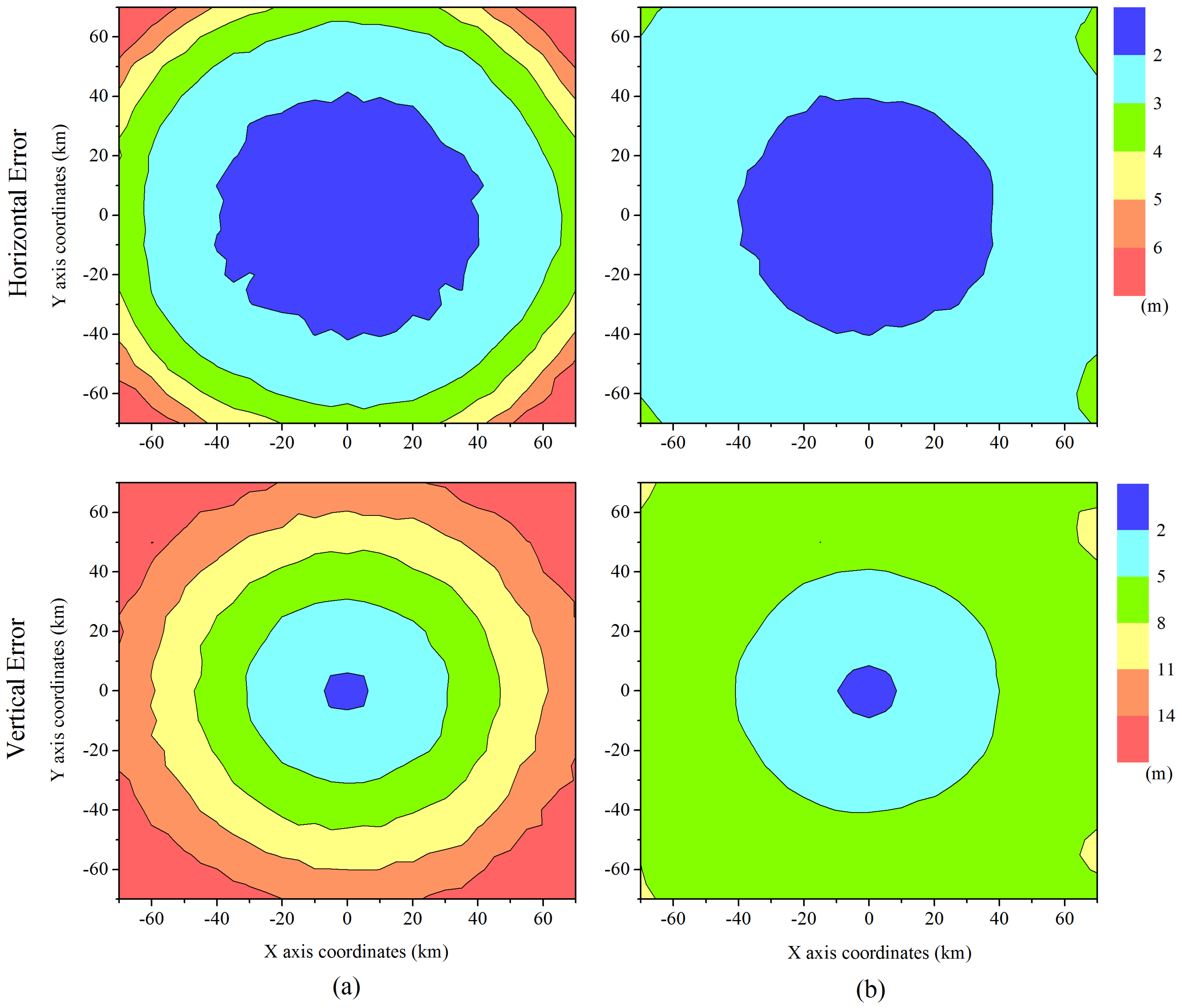
4.2.2. Relationship between Accuracy and Geometry
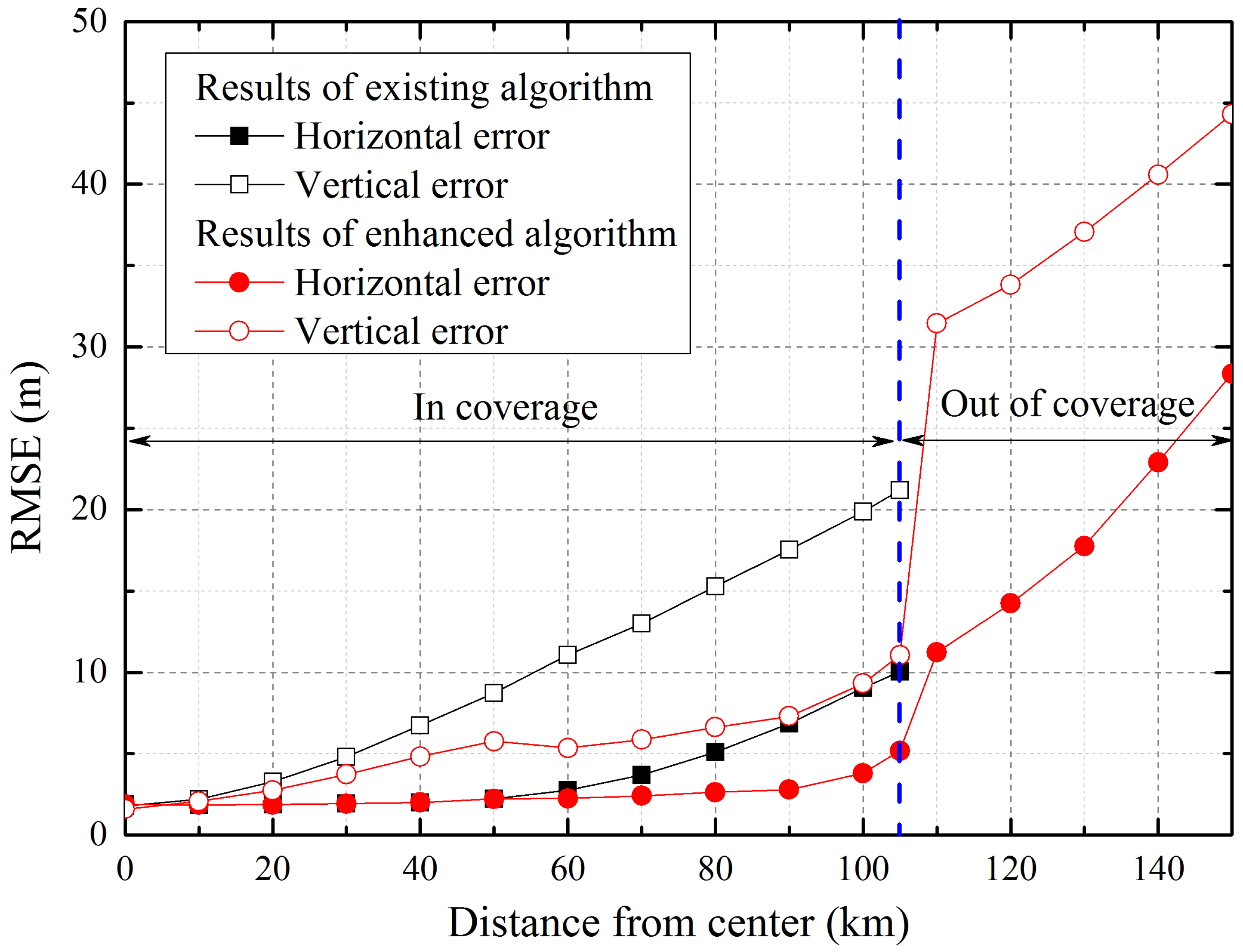
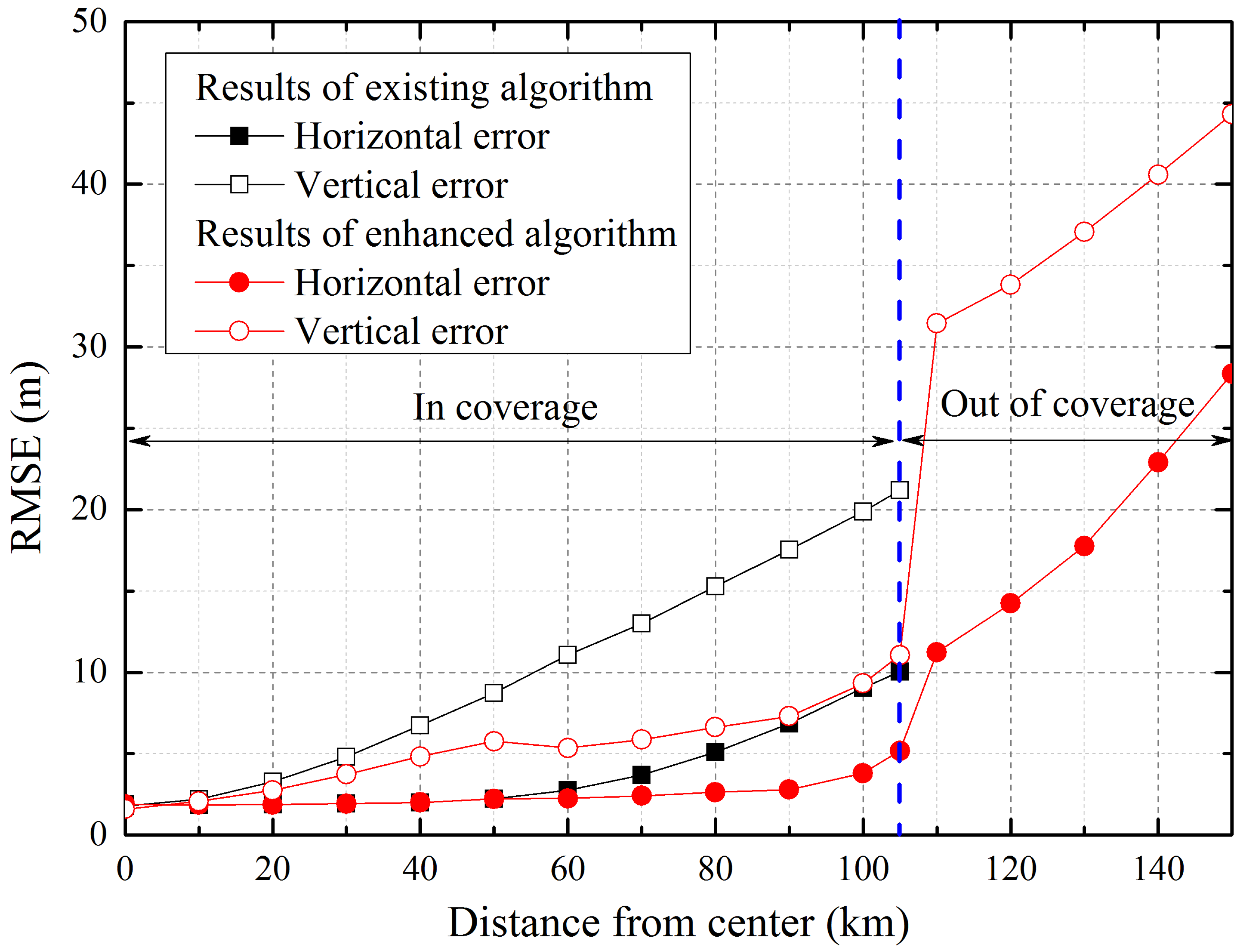
4.2.3. Performance Comparison between Existing and Enhanced Algorithms
4.2.4. Performance Evaluation for Case II
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, S.; Min, J.; Yi, B. Location based services for mobiles: Technologies and standards. In Proceedings of the 2008 IEEE Internation Conference on Communication (ICC2008), Beijing, China, 19–23 May 2008; pp. 35–38.
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5. [Google Scholar] [CrossRef] [PubMed]
- GPS World. GNSS Vulnerability and Alternative PNT. GPS World 2010, 21, 38–39. [Google Scholar]
- Wang, J. Pseudolite Applications in Positioning and Navigation: Progress and Problems. J. Glob. Position Syst. 2002, 1, 48–56. [Google Scholar] [CrossRef]
- Dai, L.; Wang, J.; Tsujii, T.; Rizos, C. Inverted pseudolite positioning and some applications. Surv. Rev. 2002, 36, 602–611. [Google Scholar] [CrossRef]
- Barnes, J.; Rizos, C.; Wang, J.; Small, D.; Voigt, G.; Gambale, N. Locata: A New Positioning Technology for High Precision Indoor and Outdoor Positioning. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 1119–1128.
- Noronha, J.; Jovancevic, A.; Bhatia, N.; Sirpatil, B.; Kirchner, M.; Saxena, D. Field test results of a flexible pseudolite based navigation system. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 102–113.
- Jang, J.; Ahn, W.; Seo, S.; Lee, J.; Park, J. Flight Test Result for the Ground-Based Radio Navigation System Sensor with an Unmanned Air Vehicle. Sensors 2015, 15, 28472–28489. [Google Scholar] [CrossRef] [PubMed]
- Tsujii, T.; Rizos, C.; Wang, J.; Dai, L.; Roberts, C.; Harigae, M. A navigation/positioning service based on pseudolites installed on stratospheric airships. In Proceedings of the 5th International Symposium on Satellite Navigation Technology & Applications, Canberra, Australia, 24–27 July 2001; pp. 24–27.
- Chandu, B.; Pant, R.; Moudgalya, K. Modeling and Simulation of a Precision Navigation System using Pseudolites Mounted on Airships. In Proceedings of the 7th Aviation Technology, Integration, and Operations (ATIO) Conferences, Belfast, Northern Ireland, UK, 18–20 September 2007.
- Park, B.; Kim, D.; Lee, T.; Kee, C.; Paik, B.; Lee, K. A Feasibility Study on a Regional Navigation Transceiver System. J. Navig. 2008, 61, 177–194. [Google Scholar] [CrossRef]
- Tiwary, K.; Behera, S.; Sharada, G.; Singh, A. Modelling and simulation of pseudolite-based navigation: A GPS-independent radio navigation system. Def. Sci. J. 2010, 60, 541–550. [Google Scholar] [CrossRef]
- Tuohino, J.; Farley, M.; James, R. Military pseudolite flight test results. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 2079–2088.
- Sultana, Q.; Sarma, A.; Kumar, A.; Malik, M. Enhancement of DOP in Stratolite-based Navigation Systems. IETE J. Res. 2012, 58, 476–482. [Google Scholar] [CrossRef]
- Lee, K.; Noh, H.; Lim, J. Airborne Relay-Based Regional Positioning System. Sensors 2015, 15, 12682–12699. [Google Scholar] [CrossRef] [PubMed]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- McGraw, A.; Murphy, T.; Brenner, M.; Pullen, S.; Van Dierendonck, A. Development of the LAAS Accuracy Models. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1212–1223.
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006. [Google Scholar]
- Ho, K.C.; Chan, Y.T. Solution and performance analysis of geolocation by TDOA. IEEE Trans. Aerosp. Elecron. Syst. 1993, 29, 1311–1322. [Google Scholar] [CrossRef]
- Wang, J.J.; Wang, J.; Sinclair, D.; Lee, H. Tropospheric Delay Estimation for Pseudolite Positioning. J. Glob. Position Syst. 2005, 4, 106–112. [Google Scholar] [CrossRef]
- SatNav Toolbox 3.0 for MATLAB. Available online: http://gpsoftnav.com/products/satellite-navigation-satnav-toolbox-3-0/ (accessed on 27 April 2016).
- Zappavigna, A. Galileo Phase B2C UERE Budget Results; European Space Agency: Paris, France, 2002. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications, 2nd ed.; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Dai, L.; Wang, J.; Tsujii, T.; Rizos, C. Pseudolite applications in positioning and navigation: Modelling and geometric analysis. In Proceedings of the International Symposium on Kinematic Systems in Geodesy, Geomatics & Navigation, Banff, AB, Canada, 5–8 June 2001; pp. 482–489.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Unit vector from the i-th airborne relay to the j-th reference station | |
| Unit vector from the i-th airborne relay to the user | |
| Position vector of the i-th airborne relay | |
| Position vector of the j-th reference station | |
| Initial user position vector | |
| Final user position vector | |
| Measured reception time of the relayed signal by the i-th airborne relay from the j-th reference station to the user | |
| Measured reception time of direct signal from the j-th reference station to the user | |
| Measured pseudorange between the j-th reference station and the user | |
| Estimated pseudorange between the i-th airborne relay and the user | |
| Estimated distance between the k-th reference station and the i-th airborne relay | |
| Estimated virtual pseudorange between the j-th reference station and the estimated initial user | |
| Distance from a User | Near <– – – – – – – – – – – – – – – – – –> Far | |||||
|---|---|---|---|---|---|---|
| Good Geometry | 2.1087 | 2.2264 | 2.2565 | 2.2451 | 2.2304 | 2.2105 |
| (10,000, 10,000, 10) | ||||||
| Poor Geometry | 4.8424 | 4.9252 | 5.6364 | 5.6731 | 5.7758 | 5.9863 |
| (60,000, 60,000, 10) | ||||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Baek, H.; Lim, J. Enhanced Positioning Algorithm of ARPS for Improving Accuracy and Expanding Service Coverage. Sensors 2016, 16, 1284. https://doi.org/10.3390/s16081284
Lee K, Baek H, Lim J. Enhanced Positioning Algorithm of ARPS for Improving Accuracy and Expanding Service Coverage. Sensors. 2016; 16(8):1284. https://doi.org/10.3390/s16081284
Chicago/Turabian StyleLee, Kyuman, Hoki Baek, and Jaesung Lim. 2016. "Enhanced Positioning Algorithm of ARPS for Improving Accuracy and Expanding Service Coverage" Sensors 16, no. 8: 1284. https://doi.org/10.3390/s16081284