
Reversed Three-Dimensional Visible Light Indoor Positioning Utilizing Annular Receivers with Multi-Photodiodes


Abstract
:1. Introduction
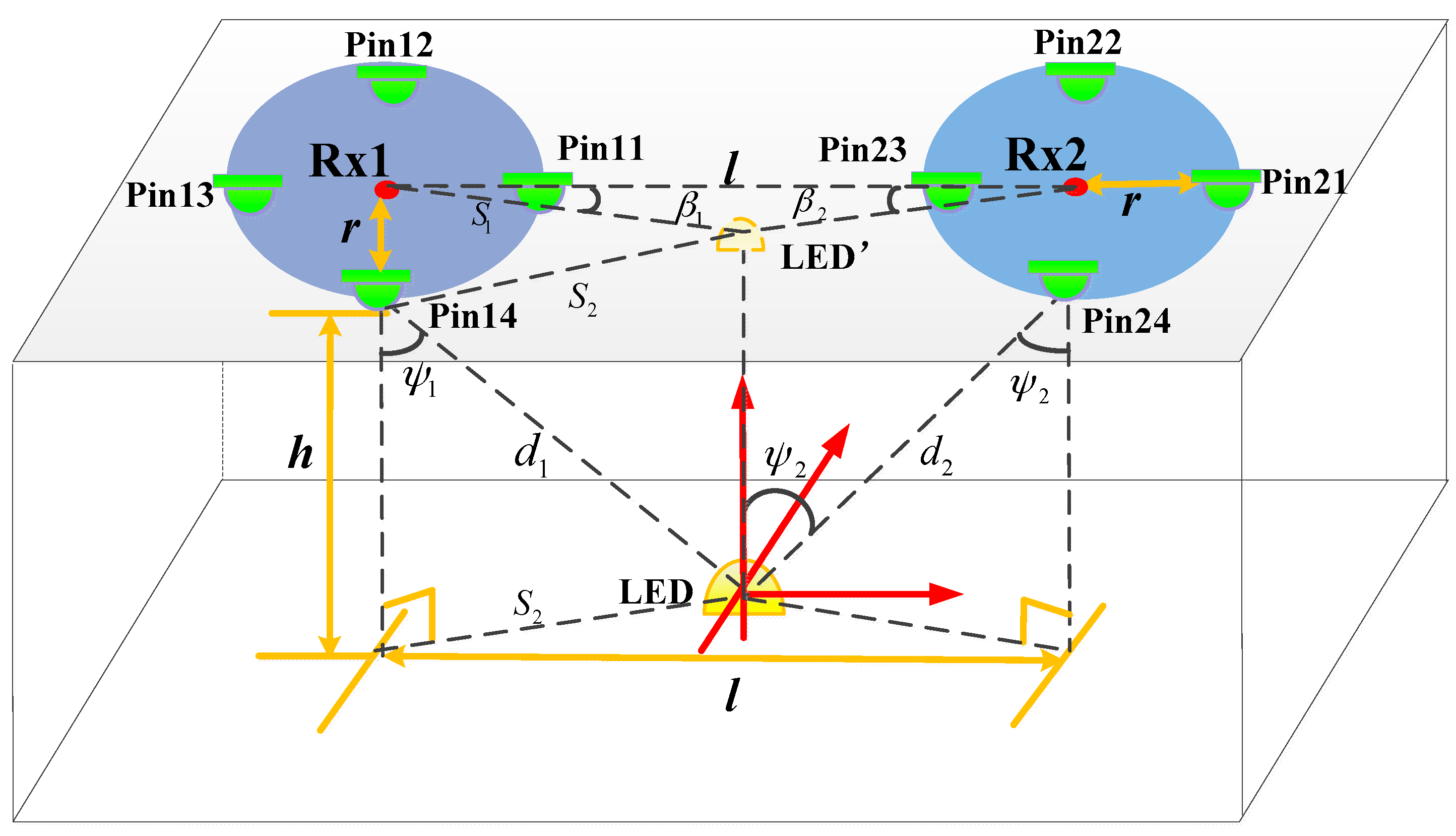
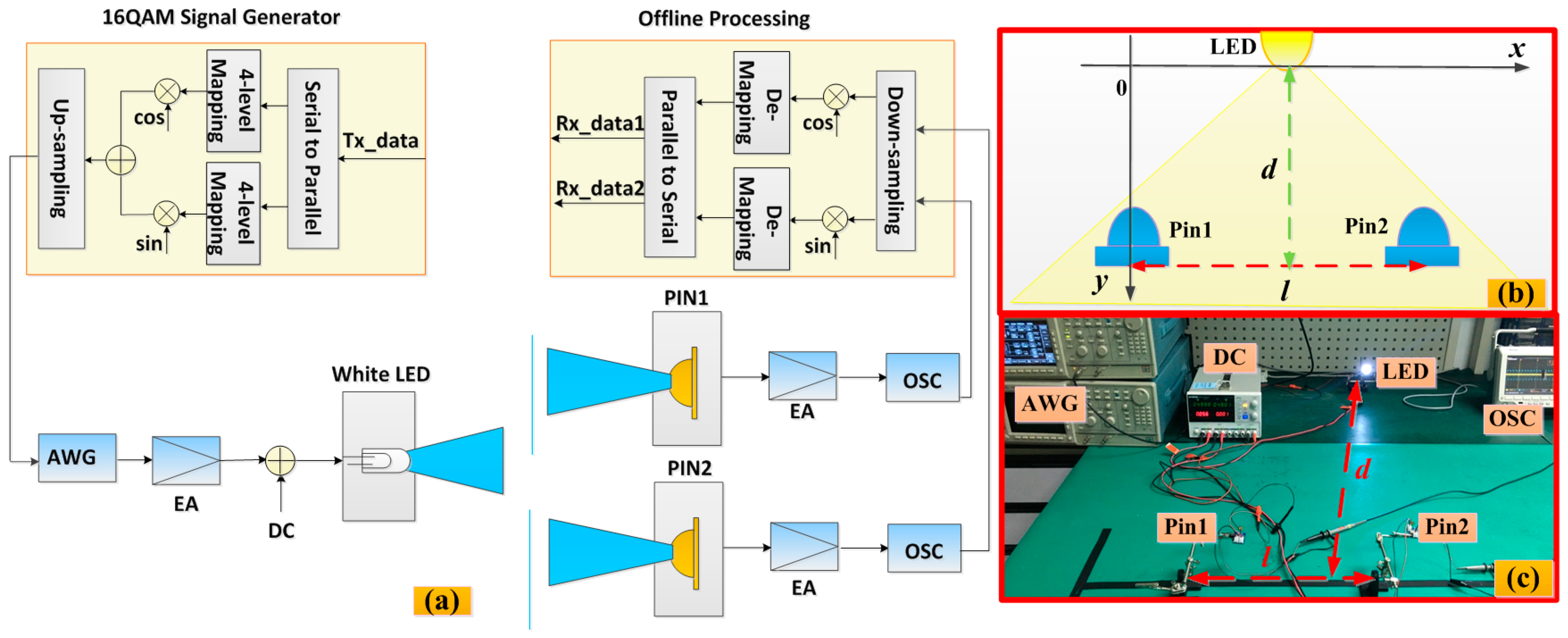
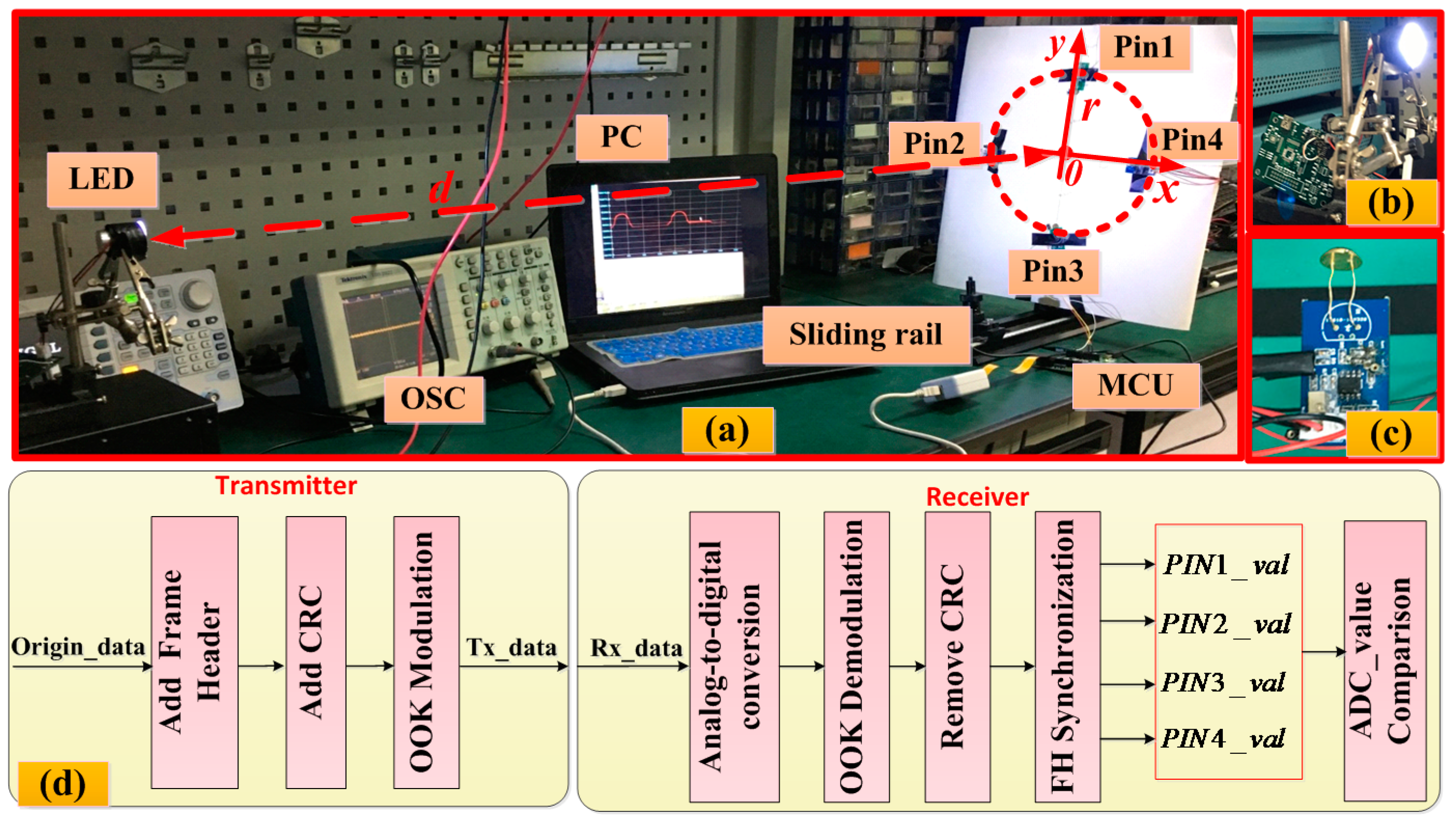
2. Materials and Methods
3. Results
3.1. The Experiment of Measuring Positioning Range
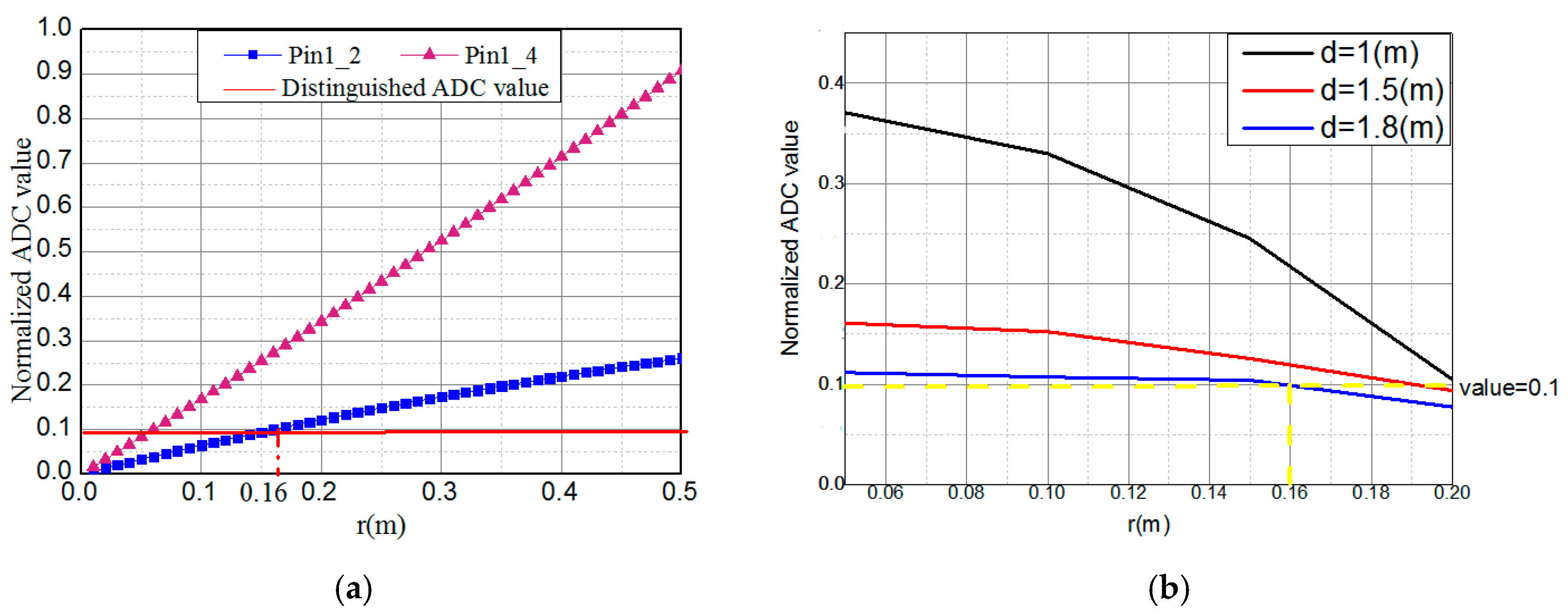
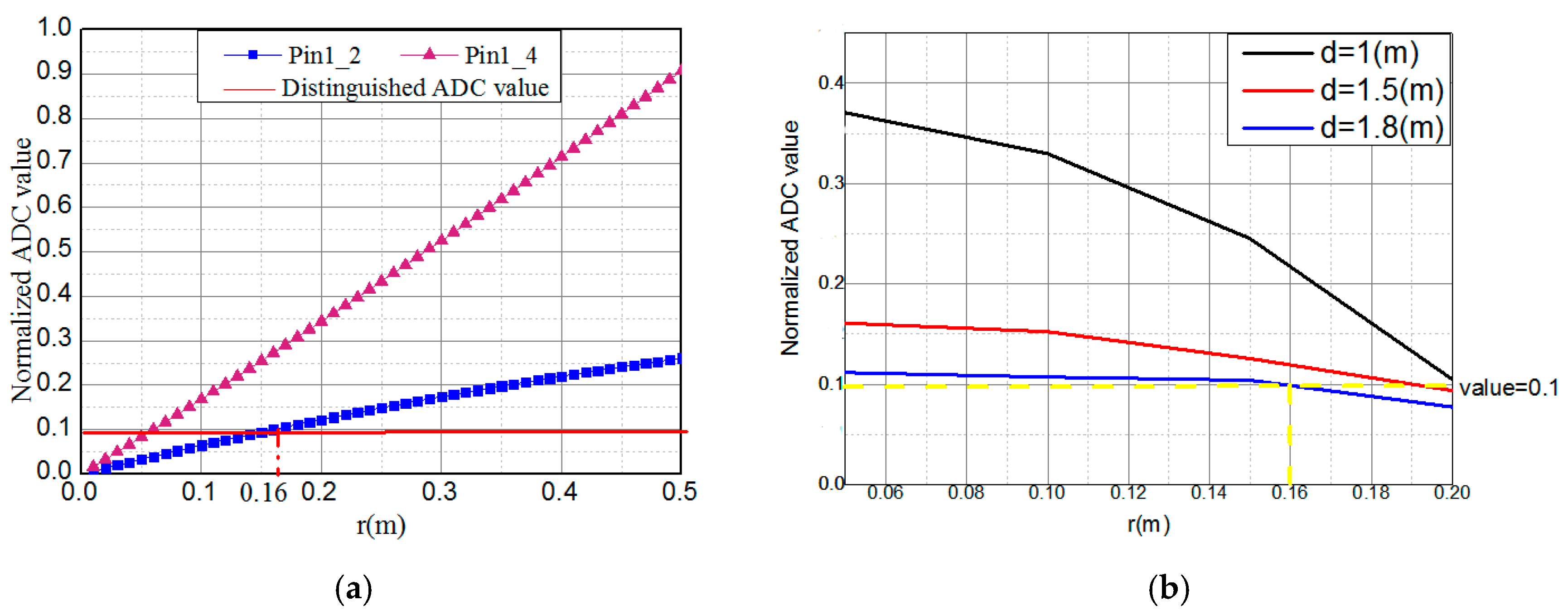
3.2. The Experiment of Receiver’s Circle Radius and Height
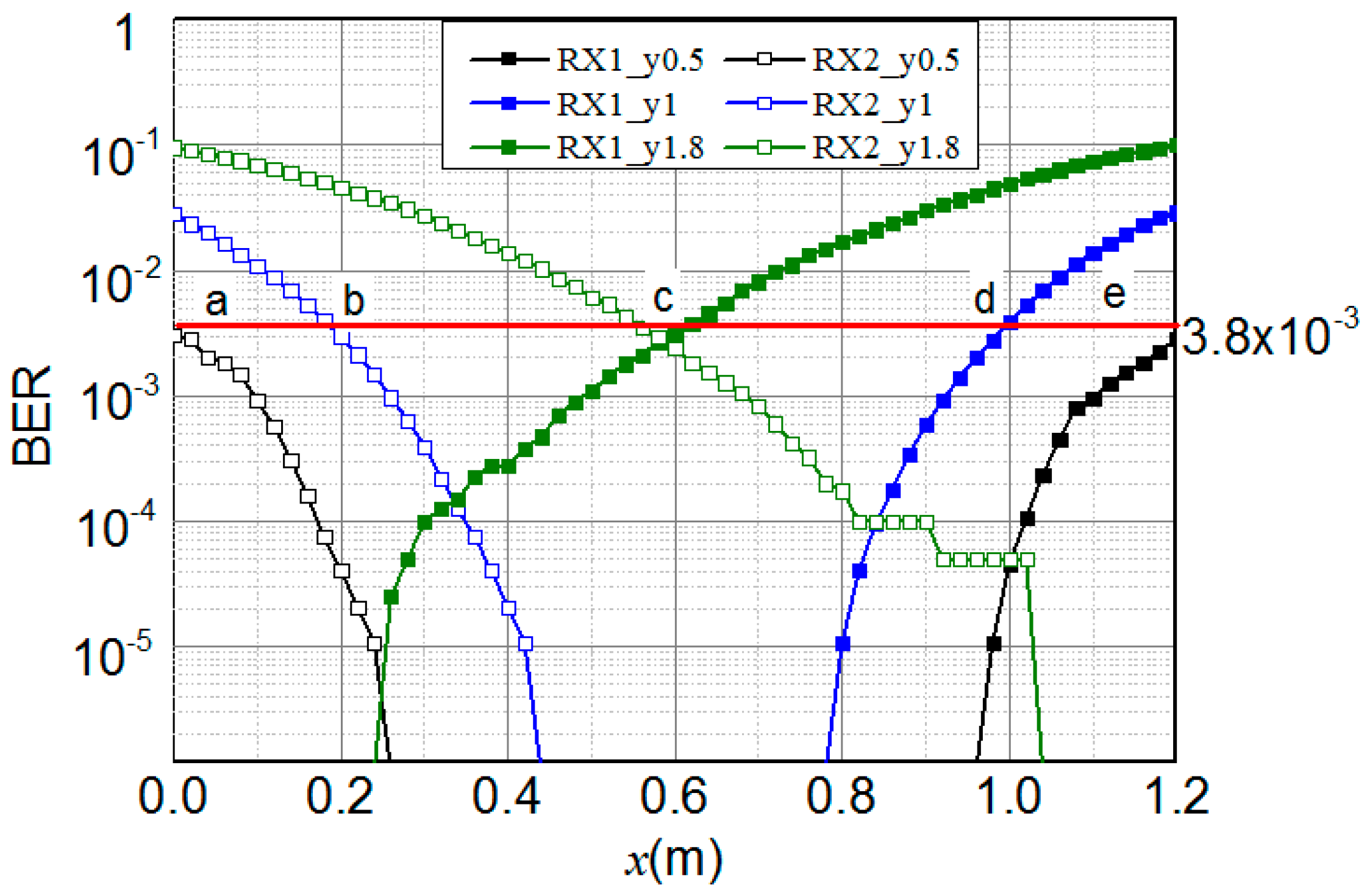
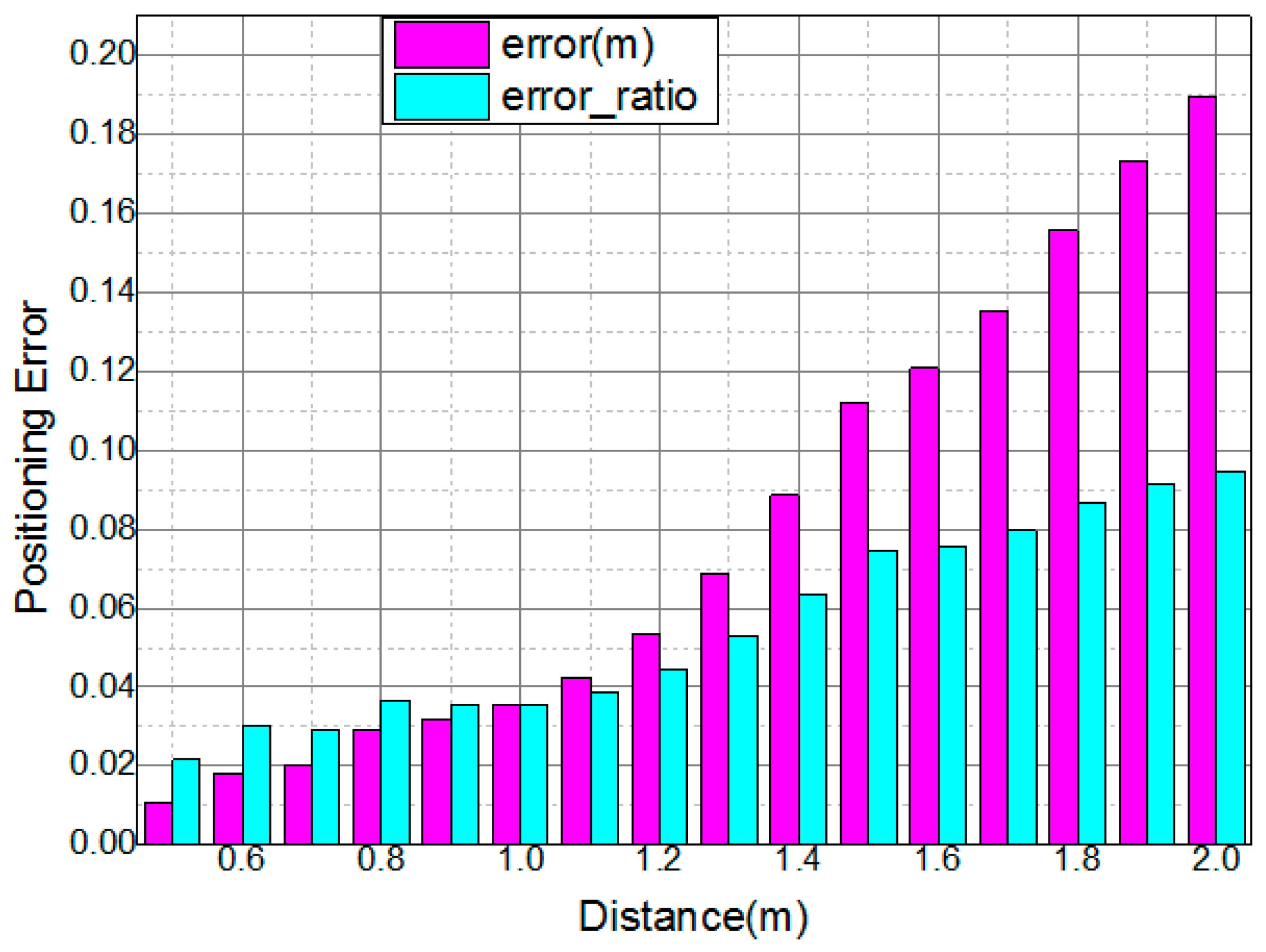
3.3. The Measurement of the Positioning Error
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| IPS | indoor positioning system |
| VLC | visible light communication |
| RSS | received signal strength |
| TOA | time of arrival |
| TDOA | time difference of arrival |
| AOA | angle of arrival |
| QAM | quadrature amplitude modulation |
| ADC | analog-to-digital conversion |
| MCU | microcontroller control unit |
| DSP | digital signal processing |
| CRC | cyclic redundancy check |
| OOK | on-off keying |
References
- Wang, Y.; Chi, N. Demonstration of high-speed 2 × 2 non-imaging MIMO Nyquist single carrier visible light communication with frequency domain equalization. J. Light. Technol. 2014, 32, 2087–2093. [Google Scholar] [CrossRef]
- Li, L.; Hu, P.; Peng, C.; Zhao, F. Epsilon: A visible light based positioning system. In Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation (NSDI 14), Seattle, WA, USA, 2–4 April 2014; pp. 331–343.
- Yin, L.; Wu, X.; Haas, H. Indoor Visible Light Positioning with Angle Diversity Transmitter. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC Fall), Boston, MA, US, 6–9 September 2015; pp. 1–5.
- Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Three-Dimensional Visible Light Indoor Localization Using AOA and RSS with Multiple Optical Receivers. J. Light. Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Keikhosrokiani, P.; Mustaffa, N.; Zakaria, N.; Sarwar, M.I. Wireless positioning techniques and location-based services: A literature review. In Multimedia and Ubiquitous Engineering; Springer Netherlands: Dordrecht, The Netherlands, 2013; pp. 785–797. [Google Scholar]
- Yang, S.; Kim, D.; Kim, H.; Son, Y.; Han, S. Visible light based high accuracy indoor localization using the extinction ratio distributions of light signals. Microw. Opt. Technol. Lett. 2013, 55, 1385–1389. [Google Scholar] [CrossRef]
- Yang, S.H.; Kim, D.R.; Kim, H.S.; Son, Y.H. Indoor positioning system based on visible light using location code. In Proceedings of the 2012 Fourth International Conference on Communications and Electronics (ICCE), Hue, Vietnam, 1–3 August, 2012.
- Xu, Y.F.; Nan, C. Positioning based on LED visible light communication utilizing MIMO-MRC algorithm. In Proceedings of the Asia Communications and Photonics Conference 2014, Shanghai, China, 11–14 November 2014.
- Wei, L.; Zhang, H.; Yu, B.; Guan, Y. High-accuracy indoor positioning system based on visible light communication. Opt. Eng. 2015, 54, 110501–110501. [Google Scholar] [CrossRef]
- Lim, J. Ubiquitous 3D positioning systems by led-based visible light communications. IEEE Wirel. Commun. 2015, 22, 80–85. [Google Scholar] [CrossRef]
- See, Y.C.; Wilson, L.; Yap, S.C.; Leong, C.F. Preliminary investigation of indoor positioning system using Visible Light Communication. In Proceedings of the 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Langkawi, Malaysia, 18–20 October 2015; pp. 226–229.
- Moon, M.; Choi, S.; Park, J.; Kim, J.Y. Indoor Positioning System using LED Lights and a Dual Image Sensor. J. Opt. Soc. Korea 2016, 19, 586–591. [Google Scholar] [CrossRef]
- Gu, W.; Kavehrad, M.; Aminikashani, M. Three-dimensional indoor light positioning algorithm based on nonlinear estimation. In Proceedings of the SPIE International Society for Optics and Photonics (OPTO), San Diego, CA, USA, 13 February 2016.
- Xu, W.; Wang, J.; Shen, H.; Kim, J.Y. Indoor Positioning for Multi-Photodiode Device Using Visible Light Communications. IEEE Photonics J. 2015, 8. [Google Scholar] [CrossRef]
- Yang, S.H.; Han, S.K. VLC based indoor positioning using single-Tx and rotatable single-Rx. In Proceedings of the IEEE 2014 12th International Conference on Optical Internet 2014 (COIN), Jeju, Korea, 27–29 August 2014; pp. 1–2.
- Arafa, A.; Dalmiya, S.; Klukas, R.; Holzman, J.F. Angle-of-arrival reception for optical wireless location technology. Opt. Express 2015, 23, 7755–7766. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x-Offset (m) | PIN1_Value | PIN2_Value | PIN3_Value | PIN4_Value | Max_Difference |
|---|---|---|---|---|---|
| 0.05 | 0.7085 | 0.6246 | 0.7261 | 0.7905 | 0.082 |
| 0.1 | 0.6762 | 0.5431 | 0.6969 | 0.8388 | 0.2957 |
| 0.15 | 0.4687 | 0.3587 | 0.4232 | 0.9319 | 0.5731 |
| 0.2 | 0.4208 | 0.2808 | 0.3960 | 1 | 0.7192 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Zhao, J.; Shi, J.; Chi, N. Reversed Three-Dimensional Visible Light Indoor Positioning Utilizing Annular Receivers with Multi-Photodiodes. Sensors 2016, 16, 1254. https://doi.org/10.3390/s16081254
Xu Y, Zhao J, Shi J, Chi N. Reversed Three-Dimensional Visible Light Indoor Positioning Utilizing Annular Receivers with Multi-Photodiodes. Sensors. 2016; 16(8):1254. https://doi.org/10.3390/s16081254
Chicago/Turabian StyleXu, Yinfan, Jiaqi Zhao, Jianyang Shi, and Nan Chi. 2016. "Reversed Three-Dimensional Visible Light Indoor Positioning Utilizing Annular Receivers with Multi-Photodiodes" Sensors 16, no. 8: 1254. https://doi.org/10.3390/s16081254